Controllo adattativo e algoritmi di stima per...
34
Controllo adattativo e algoritmi di stima per UAV Relatore: Ingegnere Daniele Carnevale Correlatore: Corrado Possieri Candidato: Emanuele Gentili Università degli studi di Roma Tor Vergata
Transcript of Controllo adattativo e algoritmi di stima per...
Controllo adattativo e algoritmi di stima per UAV
Relatore:
Ingegnere Daniele Carnevale
Correlatore:
Corrado Possieri
Candidato:
Emanuele Gentili
Università degli studi di Roma Tor Vergata
danielecarnevale
Barra
danielecarnevale
Testo inserito
danielecarnevale
Testo inserito
Ing.
Indice
• Introduzione: cos’è uno UAV
• Modellazione: 6DOF
• Controllo adattativo: Immersion & Invariance
• Linearizzazione del modello e Osservatore dello stato
• Controllore statico in retroazione dallo stato

Cos’è uno UAV
Si distinguono per
• Dimensione (da nano, a micro, a qualche metro)
• Propulsione (motore a reazione, a elica...)
• Pilotaggio (da remoto o automatico)
• Equipaggiamento (scopi civili o militari)
Unmanned Aerial Vehicle
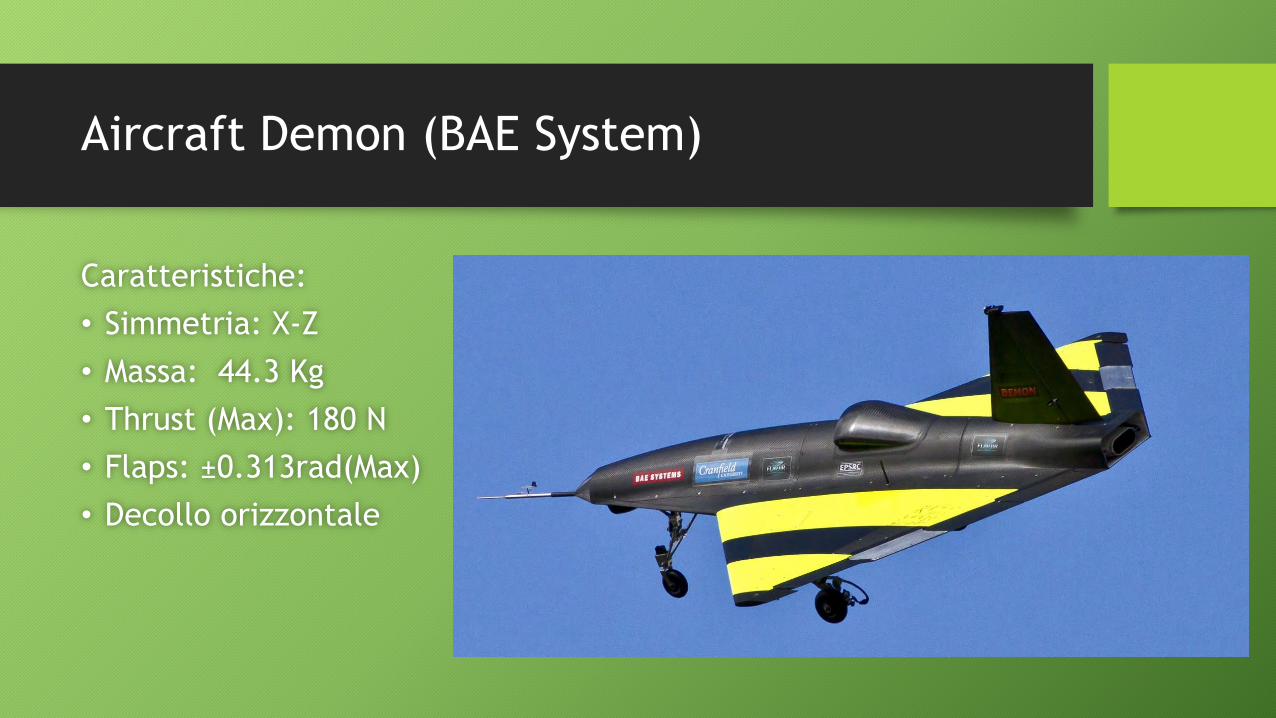
Aircraft Demon (BAE System)
Caratteristiche:
• Simmetria: X-Z
• Massa: 44.3 Kg
• Thrust (Max): 180 N
• Flaps: ±0.313rad(Max)
• Decollo orizzontale
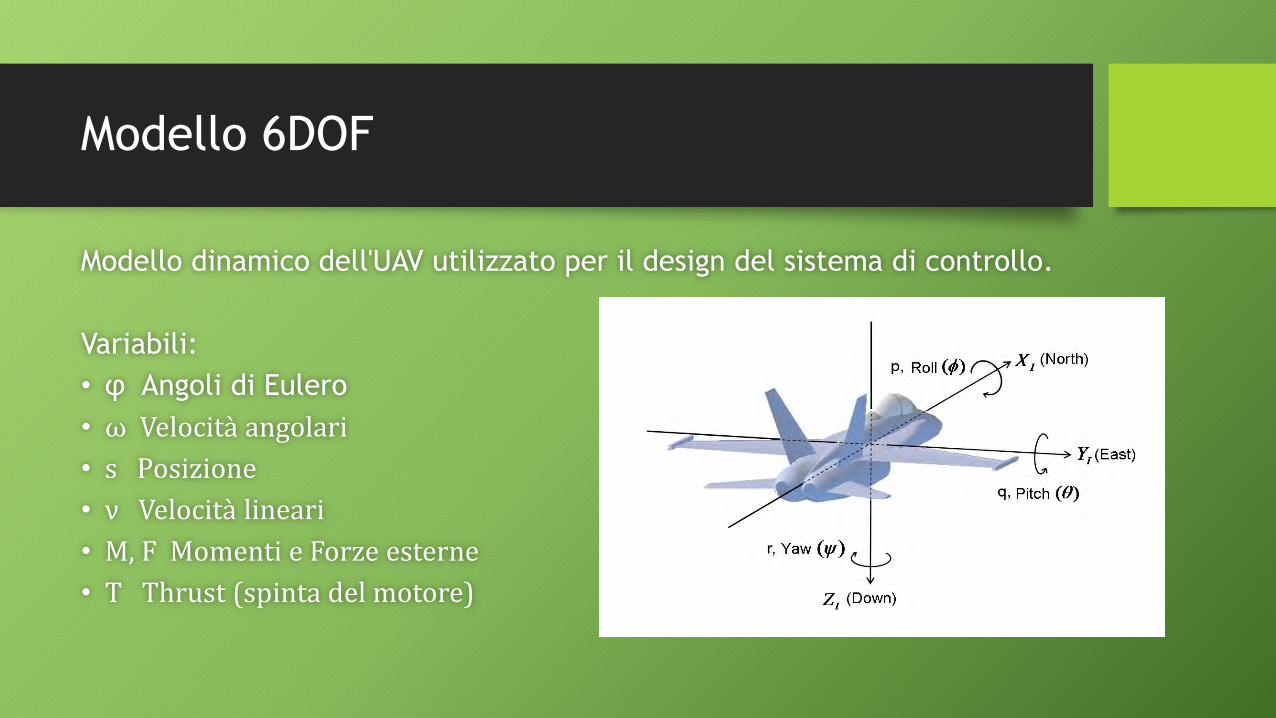
Modello 6DOF
Modello dinamico dell'UAV utilizzato per il design del sistema di controllo.
Variabili:
• φ Angoli di Eulero
• ω Velocità angolari
• s Posizione
• ν Velocità lineari
• M, F Momenti e Forze esterne
• T Thrust (spinta del motore)
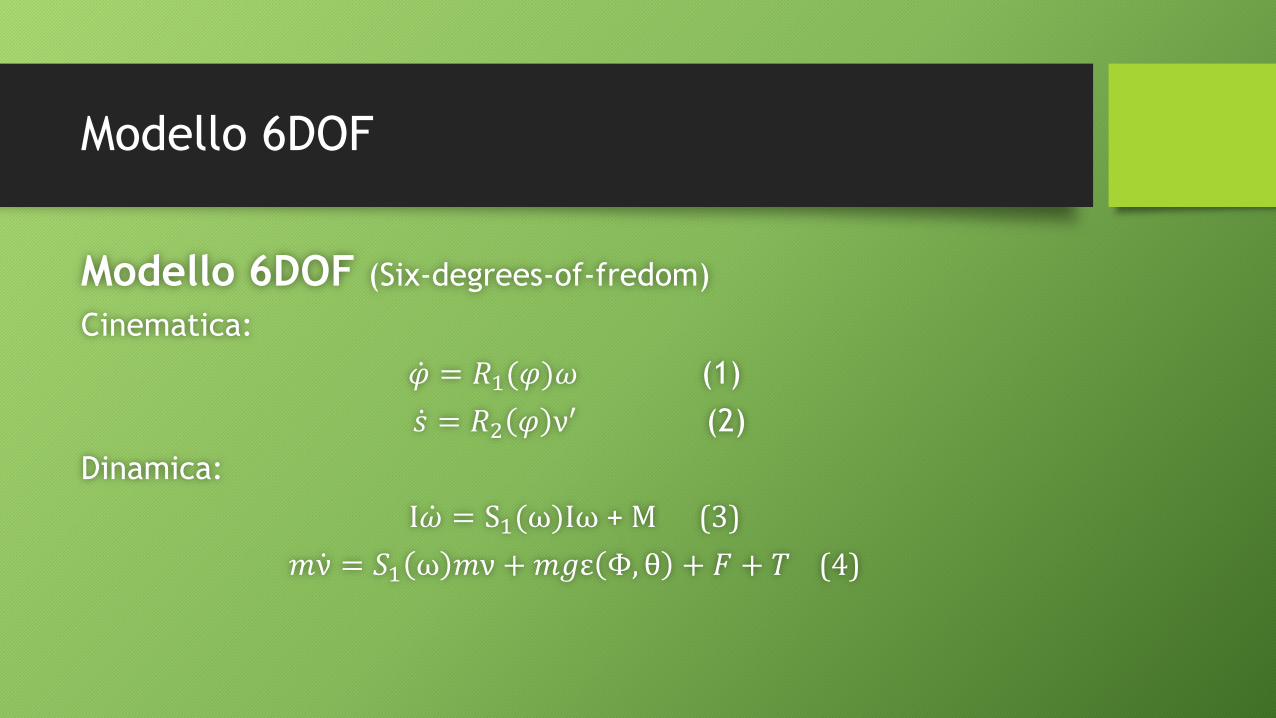
Modello 6DOF
Modello 6DOF (Six-degrees-of-fredom)
Cinematica:
𝜑 = 𝑅1(𝜑)𝜔 (1)
𝑠 = 𝑅2 𝜑 ν′ (2)
Dinamica:
I 𝜔 = S1(ω)Iω + M (3)
𝑚 ν = 𝑆1 ω 𝑚ν +𝑚𝑔ε Φ, θ + 𝐹 + 𝑇 (4)
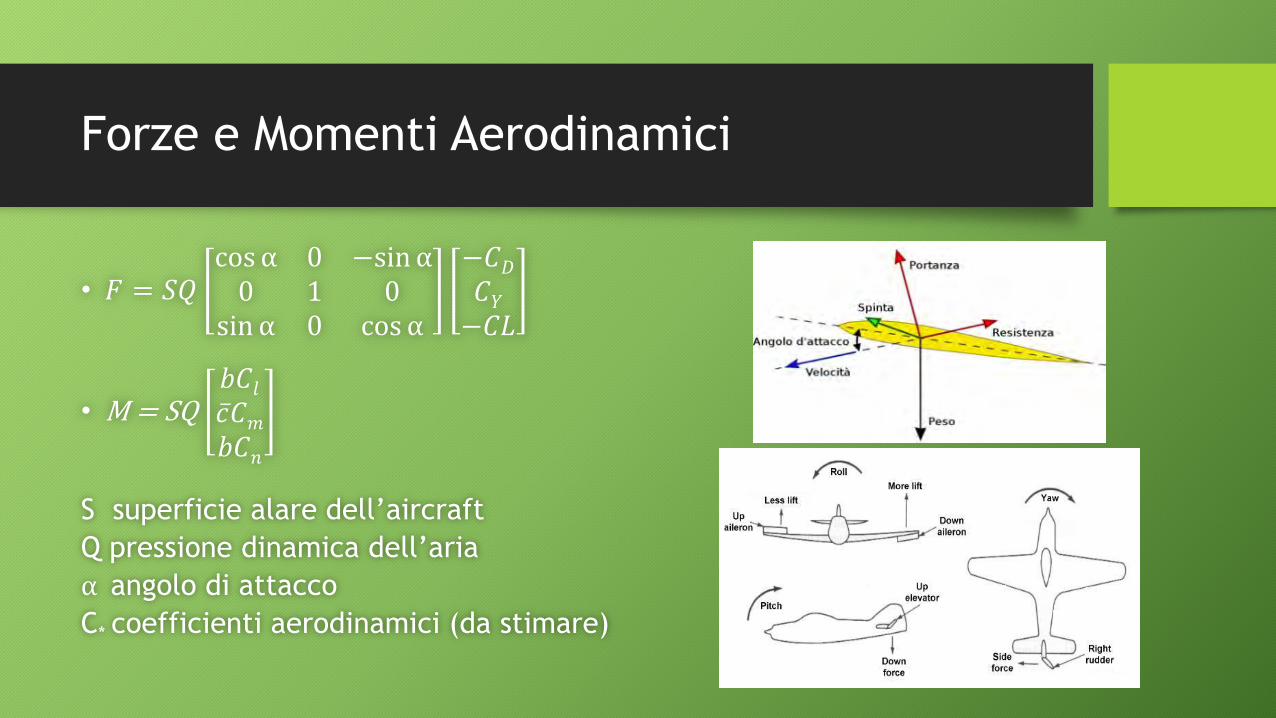
Forze e Momenti Aerodinamici
• 𝐹 = 𝑆𝑄cos α 0 −sin α0 1 0
sin α 0 cos α
−𝐶𝐷𝐶𝑌−𝐶𝐿
• M = SQ𝑏𝐶𝑙 𝑐𝐶𝑚𝑏𝐶𝑛
S superficie alare dell’aircraft
Q pressione dinamica dell’aria
α angolo di attacco
C* coefficienti aerodinamici (da stimare)
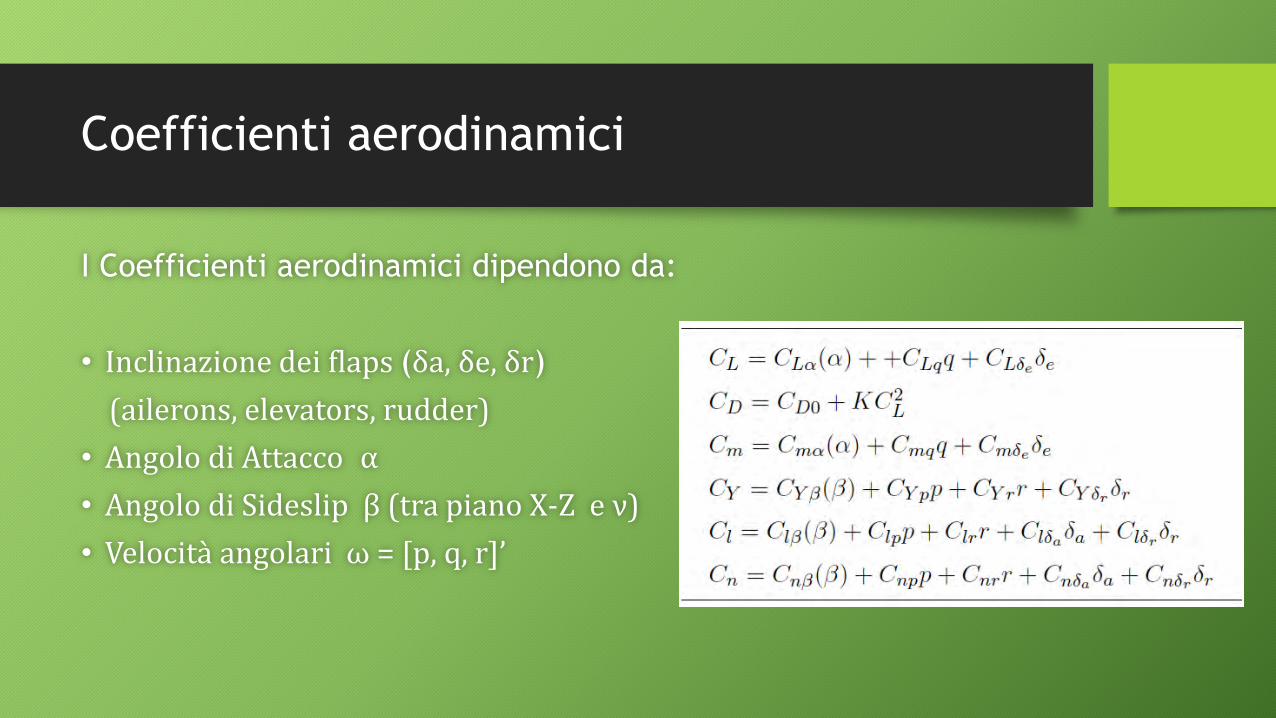
Coefficienti aerodinamici
I Coefficienti aerodinamici dipendono da:
• Inclinazione dei flaps (δa, δe, δr)
(ailerons, elevators, rudder)
• Angolo di Attacco α
• Angolo di Sideslip β (tra piano X-Z e ν)
• Velocità angolari ω = [p, q, r]’
Il problema del controllo
Possiamo controllare l’Aircraft nella sua interezza tramite quattro ingressi:
• Flaps
• Throttle (Manetta)
Si vuole implementare un controllo di Trim (M = 0) e di traiettoria.
Che approccio seguire?
• Immersion & Invariance
• Linearizzazione con legge di cotrollo in retroazione dallo stato.
danielecarnevale
Testo inserito
lo stile non mi sembra lo stesso
Immersion & Invariance
E’ un controllo adattativo basato su Varietà Invarianti.
• Si applica a sistemi non lineari parametrizzati linearmente
• Assicura la convergenza a zero dell’errore di stima dei parametri
• Garantisce l’inseguimento asintotico della traiettoria desiderata
Il termine ‘adattativo’ indica che il controllo ricava ed utilizza una stima real-time dei parametri non noti a priori.
Immersion & Invariance – Teoria (1)
𝑦 = ℎ 𝑦, 𝑥, 𝑢
𝑥 = 𝑓 𝑦, 𝑥, 𝑢 + Φ 𝑦, 𝑥 θ ξ = 𝑤
Si definisca la varietà(manifold) 𝑺
𝑺 = x, y, ξ ξ + β 𝑥, 𝑦 − θ = 0}
e l’errore di stima z𝑧 = ξ + β 𝑥, 𝑦 − θ
Allora la legge dinamica 𝑤 che rende la varietà invariante
𝑤 = −𝜕β
𝜕𝑦ℎ 𝑦, 𝑥, 𝑢 −
𝜕β
𝜕𝑥𝑓 𝑥, 𝑦, 𝑢 + Φ 𝑦, 𝑥 (ξ+β(y,x))
Sistema parametrizzato linearmente esteso.χ = (y, x) è lo stato del sistema,θ rappresenta i parametri da stimare, con
Φ(y,x)θ = φ1 𝑦, 𝑥1
⊤ ⋯ 0⋮ ⋱ ⋮0 ⋯ φ𝑛 𝑦, 𝑥𝑛
⊤
θ1⋮θ𝑛
danielecarnevale
Barra
danielecarnevale
Testo inserito
esteso
danielecarnevale
Testo inserito
introduci \xi, dinamica del controllore
danielecarnevale
Testo inserito
è
danielecarnevale
Testo inserito
metti il punto alla fine dell'equazione di sopra, devi usare la punteggiatura anche per le equazioni
Immersion & Invariance – Teoria (2)
Derivando l’errore rispetto al tempo (𝑧 = ξ + β 𝑥, 𝑦 − θ)
𝑧 = −𝜕β
𝜕𝑥Φ 𝑦, 𝑥 z (5)
rimane da scegliere β(y,x) in modo tale che 𝑧 converga a zero.
La scelta più ovvia è la seguente
βi(y,x) = γ𝑖 0𝑥𝑖φ𝑖 𝑦, σ 𝑑σ con γi>0 , i = 1,...,n
Ovvero risulta
𝑧 = −ГΦ 𝑦, 𝑥 Φ 𝑦, 𝑥 z con Г = diag(γ1,...,γn)
forma definita negativa, quindi z=0 è un punto di equilibrio globalmente uniformemente asintoticamente stabile del sistema.
danielecarnevale
Barra
danielecarnevale
Testo inserito
una possibile scelta
danielecarnevale
Barra
danielecarnevale
Testo inserito
, tale che
danielecarnevale
Barra
danielecarnevale
Testo inserito
dove \phi()\Phi è
Immersion & Invariance – Teoria (3)
Supponiamo che esista una legge 𝑢 = υ(𝑦, 𝑥, θ+z)
tale che, per ogni traiettoria a ciclo chiuso, valga
a) Φ(y(t),x(t))z(t) ∈ L2 ⇒ χ(t) ∈ L∞b) lim
𝑡→∞Φ(y(t),x(t))z(t) = 0 ⇒ lim
𝑡→∞χ(t) = χ*
Allora la seguente legge di controllo adattativa in retroazione dallo stato 𝑢 = υ(𝑦, 𝑥, ξ+β(y,x))
è tale per cui tutti i segnali a ciclo chiuso sono limitati e lo stato χconverge allo stato desiderato χ*.
danielecarnevale
Testo inserito
devi decidere una dimensione del carattere e mantenere sempre quella, controlla tutto.
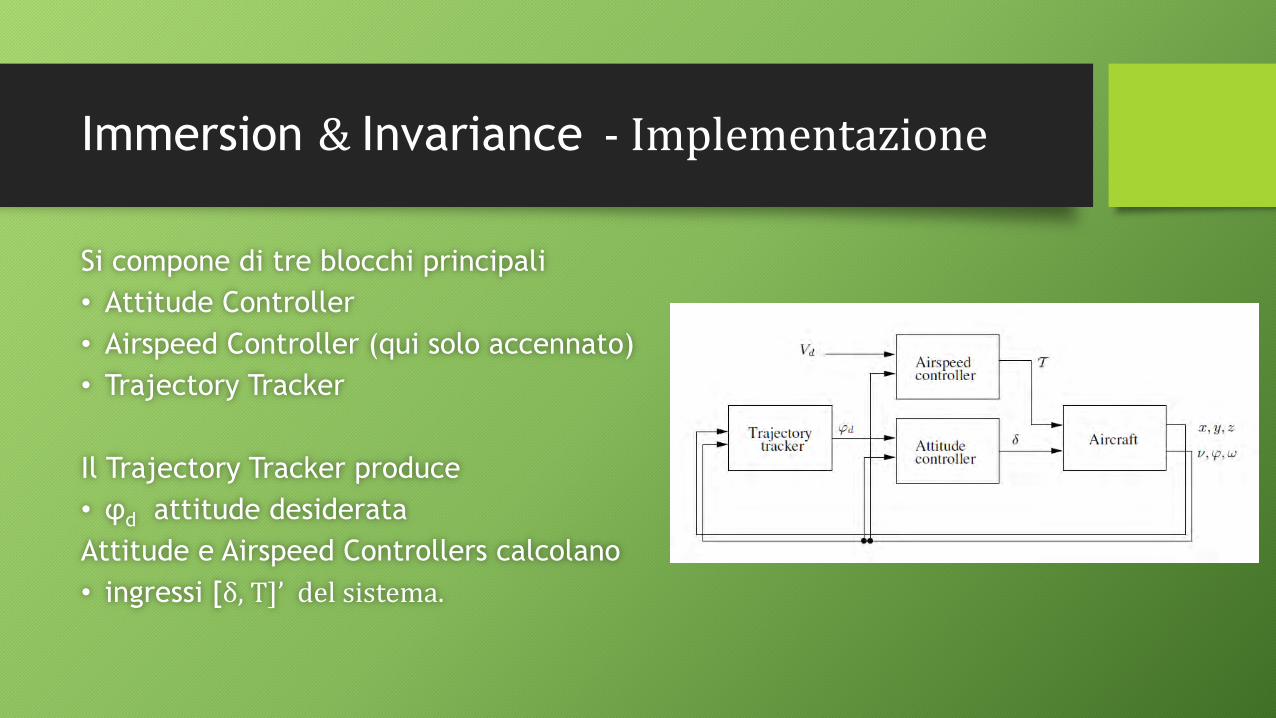
Immersion & Invariance - Implementazione
Si compone di tre blocchi principali
• Attitude Controller
• Airspeed Controller (qui solo accennato)
• Trajectory Tracker
Il Trajectory Tracker produce
• φd attitude desiderata
Attitude e Airspeed Controllers calcolano
• ingressi [δ, T]’ del sistema.
Immersion & Invariance – Attitude Control
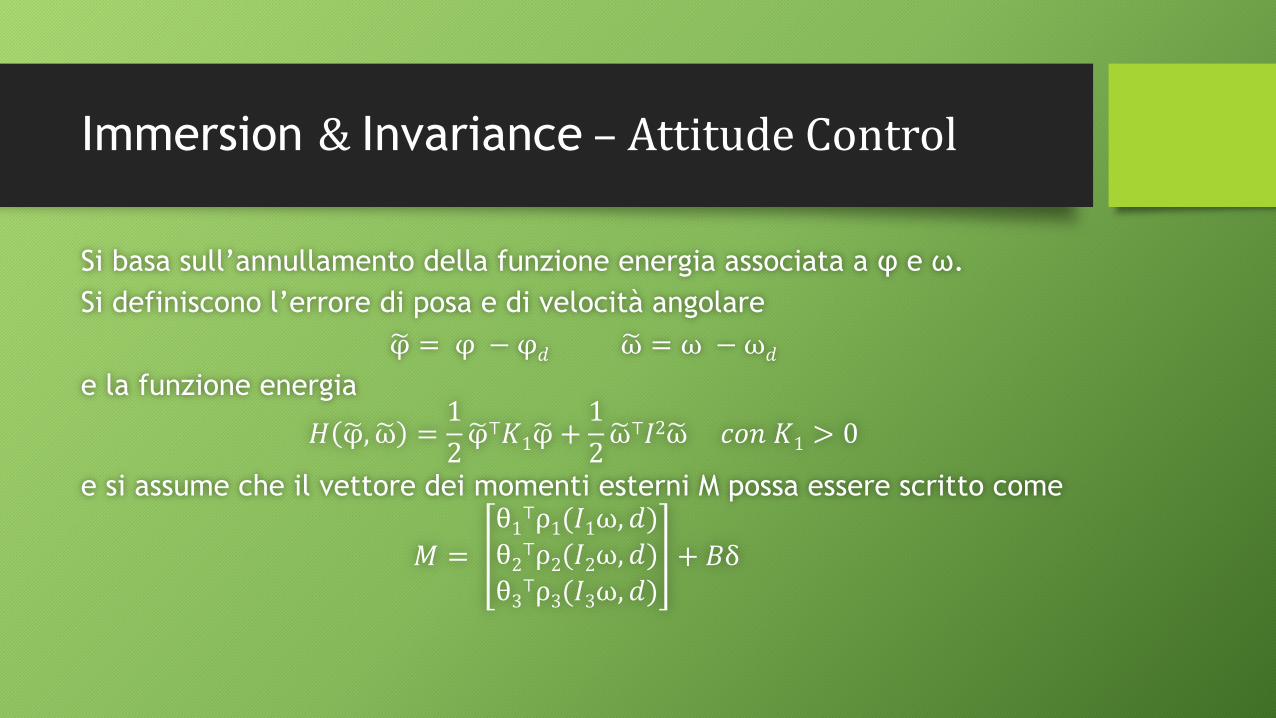
Si basa sull’annullamento della funzione energia associata a φ e ω.
Si definiscono l’errore di posa e di velocità angolare
φ = φ − φ𝑑 ω = ω −ω𝑑
e la funzione energia
𝐻 φ, ω =1
2 φ⊤𝐾1 φ +
1
2 ω⊤𝐼2 ω 𝑐𝑜𝑛 𝐾1 > 0
e si assume che il vettore dei momenti esterni M possa essere scritto come
𝑀 =
θ1⊤ρ1(𝐼1ω, 𝑑)
θ2⊤ρ2(𝐼2ω, 𝑑)
θ3⊤ρ3(𝐼3ω, 𝑑)
+ 𝐵δ
Immersion & Invariance – Attitude Control (2)
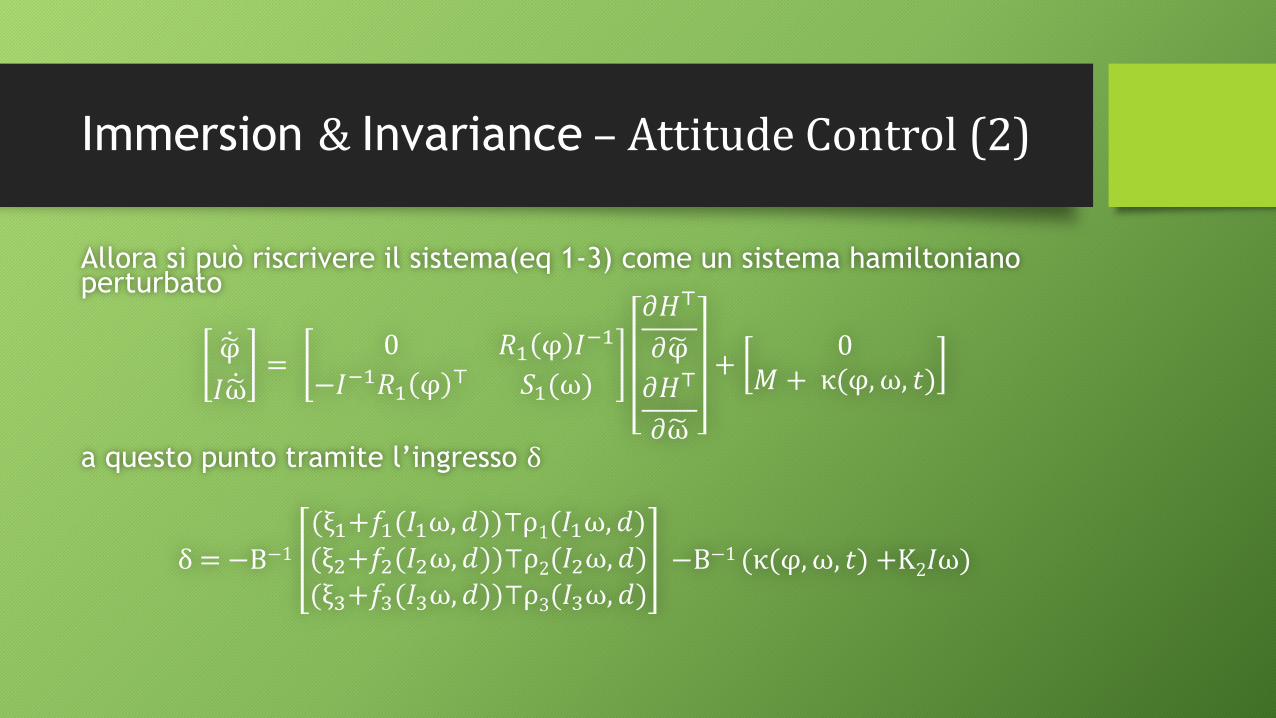
Allora si può riscrivere il sistema(eq 1-3) come un sistema hamiltoniano perturbato
φ
𝐼 ω=
0 𝑅1 φ 𝐼−1
−𝐼−1𝑅1 φ ⊤ 𝑆1(ω)
𝜕𝐻⊤
𝜕 φ
𝜕𝐻⊤
𝜕 ω
+0
𝑀 + κ(φ,ω, 𝑡)
a questo punto tramite l’ingresso δ
δ = −B−1(ξ1+𝑓1(𝐼1ω, 𝑑))⊤ρ1(𝐼1ω, 𝑑)(ξ2+𝑓2(𝐼2ω, 𝑑))⊤ρ2(𝐼2ω, 𝑑)(ξ3+𝑓3(𝐼3ω, 𝑑))⊤ρ3(𝐼3ω, 𝑑)
−B−1 (κ(φ,ω, 𝑡) +K2𝐼ω)
Immersion & Invariance – Attitude Control (3)
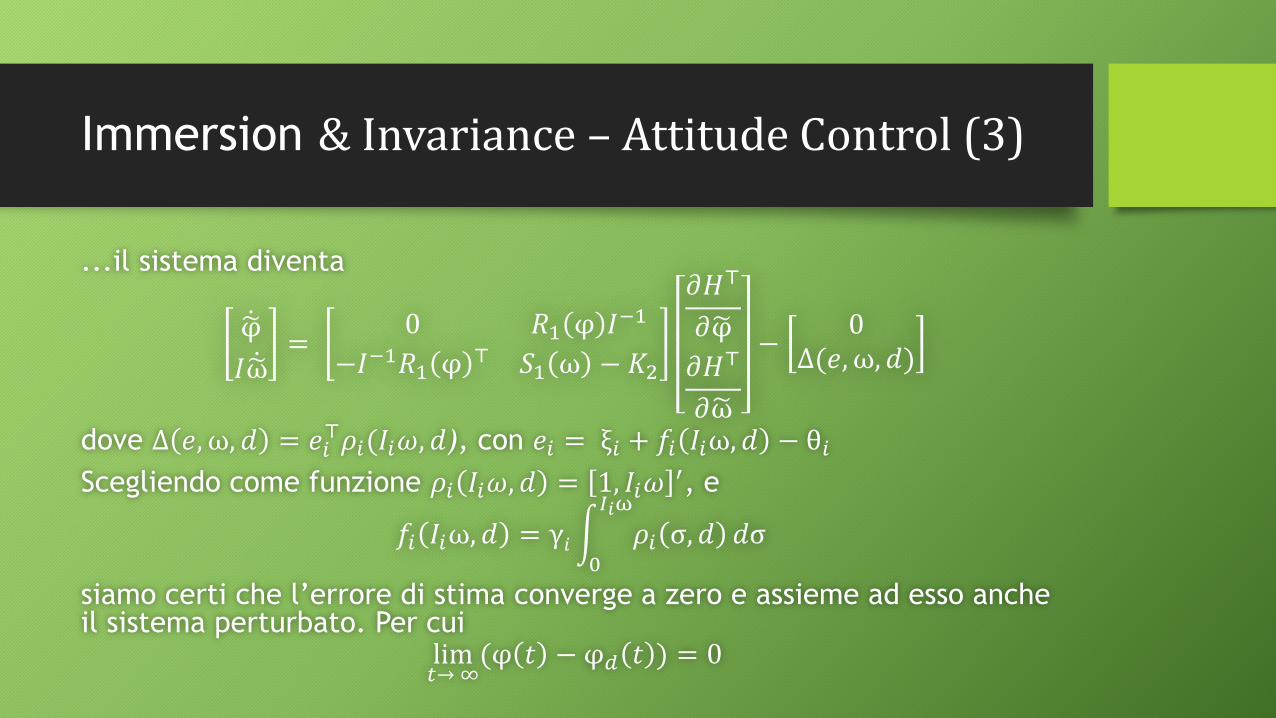
...il sistema diventa
φ
𝐼 ω=
0 𝑅1 φ 𝐼−1
−𝐼−1𝑅1 φ ⊤ 𝑆1 ω − 𝐾2
𝜕𝐻⊤
𝜕 φ
𝜕𝐻⊤
𝜕 ω
−0
Δ(𝑒, ω, 𝑑)
dove Δ 𝑒,ω, 𝑑 = 𝑒𝑖⊤𝜌𝑖(𝐼𝑖𝜔, 𝑑), con 𝑒𝑖 = ξ𝑖 + 𝑓𝑖 𝐼𝑖ω, 𝑑 − θ𝑖
Scegliendo come funzione 𝜌𝑖 𝐼𝑖𝜔, 𝑑 = 1, 𝐼𝑖𝜔′, e
𝑓𝑖 𝐼𝑖ω, 𝑑 = γ𝑖 0
𝐼𝑖ω
𝜌𝑖 σ, 𝑑 𝑑σ
siamo certi che l’errore di stima converge a zero e assieme ad esso anche il sistema perturbato. Per cui
lim𝑡→∞
(φ 𝑡 − φ𝑑 𝑡 ) = 0
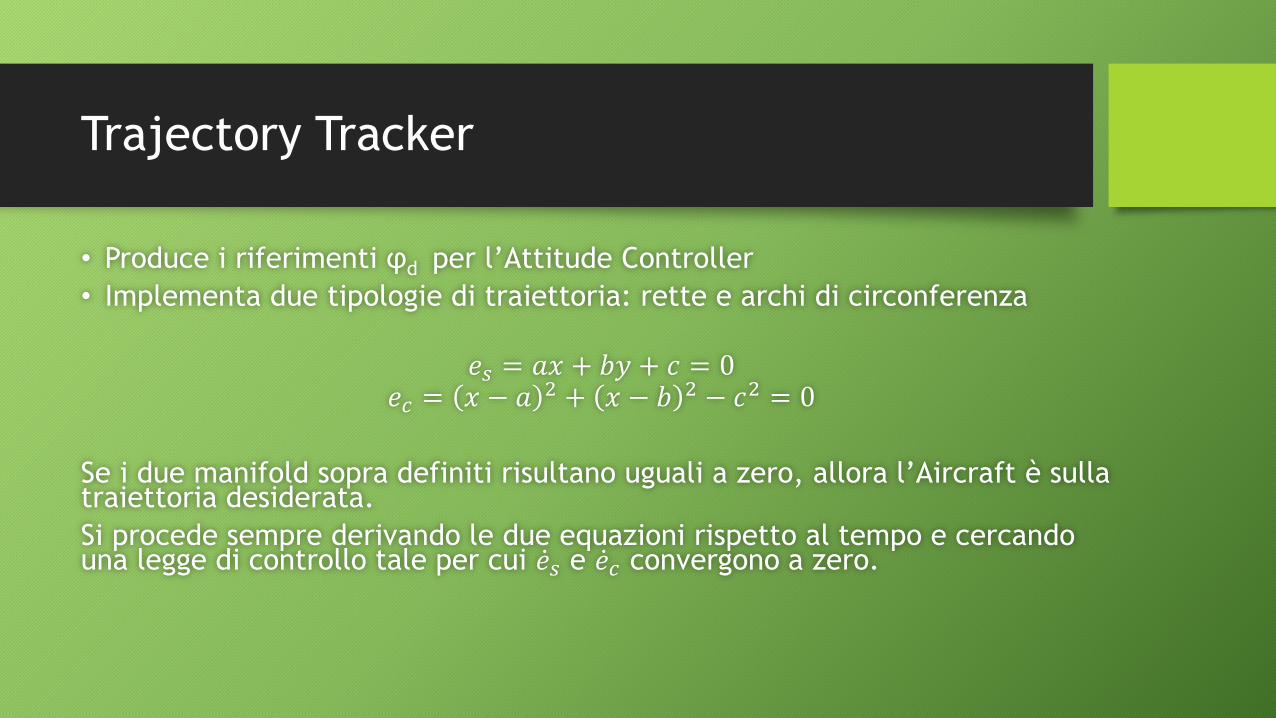
Trajectory Tracker
• Produce i riferimenti φd per l’Attitude Controller
• Implementa due tipologie di traiettoria: rette e archi di circonferenza
𝑒𝑠 = 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0𝑒𝑐 = 𝑥 − 𝑎 2 + 𝑥 − 𝑏 2 − 𝑐2 = 0
Se i due manifold sopra definiti risultano uguali a zero, allora l’Aircraft è sulla traiettoria desiderata.
Si procede sempre derivando le due equazioni rispetto al tempo e cercando una legge di controllo tale per cui 𝑒𝑠 e 𝑒𝑐 convergono a zero.
Trajectory Tracker (1)
Cinematica:
𝑥 = 𝑉2cos λ 𝑦 = 𝑉2sin λ 𝑧 = 𝑉1𝑠𝑖𝑛γ
Dinamica del manifold:
𝑒𝑠 = 𝑉2 𝑎2 + 𝑏2sin(λ + arctan(𝑎
𝑏))
𝑒𝑐 = 2𝑉2 𝑒𝑐 + 𝑐2sin(λ + arctan(𝑥 − 𝑎
𝑦 − 𝑏))
Ricavando rispetto a θ e ψ
𝑃𝑎𝑡ℎ 𝑎𝑛𝑔𝑙𝑒: γ = θ − 𝑎𝑟𝑐𝑡𝑎𝑛(𝑣𝑠𝑖𝑛Φ + 𝑤𝑐𝑜𝑠Φ
𝑢)
𝐻𝑒𝑎𝑑𝑖𝑛𝑔 𝑎𝑛𝑔𝑙𝑒: λ = ψ + arctan(𝑣𝑐𝑜𝑠Φ − 𝑤𝑠𝑖𝑛Φ
𝑉1𝑐𝑜𝑠γ)
λ𝑠 = −arctan𝑎
𝑏− arctan(𝑘𝑝𝑒𝑠)+ (π)
λ𝑐 = −arctan𝑥 − 𝑎
𝑦 − 𝑏− arctan(𝑘𝑝𝑒𝑐)+(π)
Selezioni per λ
Trajectory Tracker(2)
Allora possiamo assegnare i tre seguenti angoli di eulero
Φ = arctan(𝐺
𝑐𝑜𝑠α)
θ = arctan𝑣𝑠𝑖𝑛Φ + 𝑤𝑐𝑜𝑠Φ
𝑢− arctan(kh ℎ − ℎ𝑑 )
ψ = −arctan𝑣𝑐𝑜𝑠Φ − 𝑤𝑠𝑖𝑛Φ
𝑉1 cos 𝛾+ λ∗
E tutte le traiettorie convergono verso i due manifold
𝑒𝑠 oppure 𝑒𝑐 .
Costanti
𝐺 = 𝑉2 𝑔𝑐 (forza centripeta)
𝑉1 = 𝑢2 + 𝑣𝑠𝑖𝑛Φ + 𝑤𝑐𝑜𝑠Φ 2
𝑉2 = 𝑉𝑐𝑜𝑠𝛾
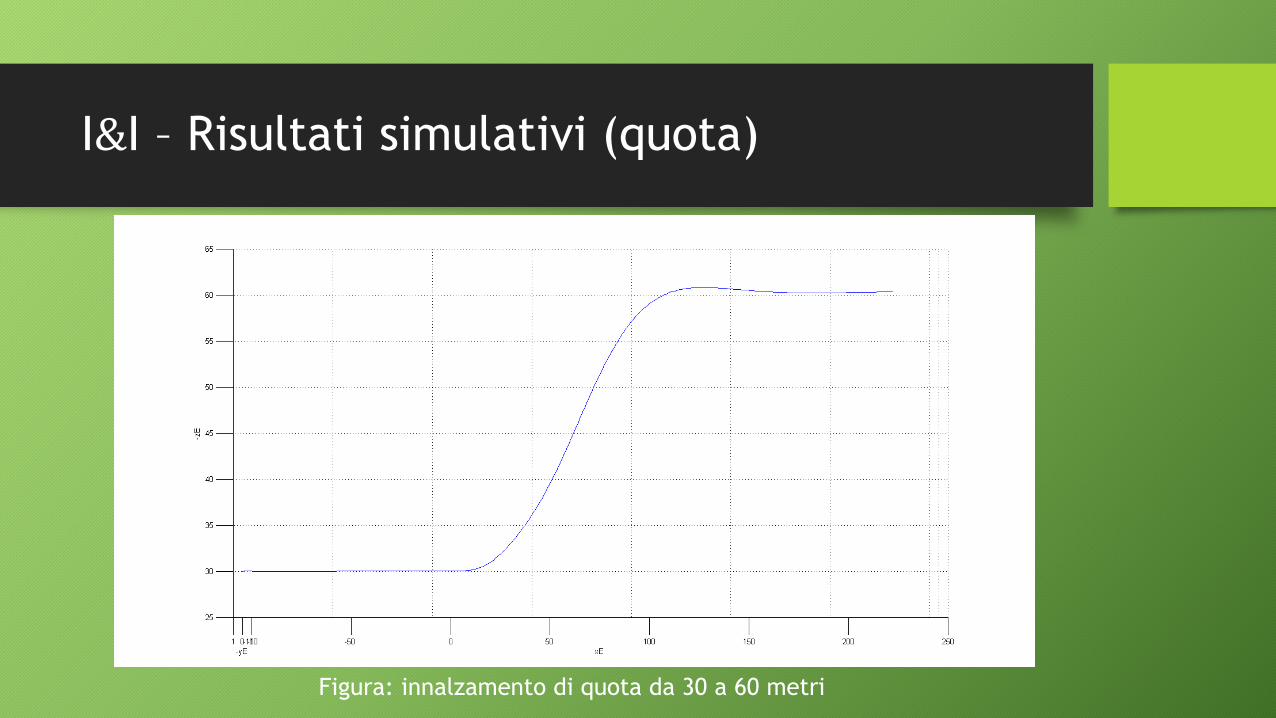
I&I – Risultati simulativi (quota)
Figura: innalzamento di quota da 30 a 60 metri
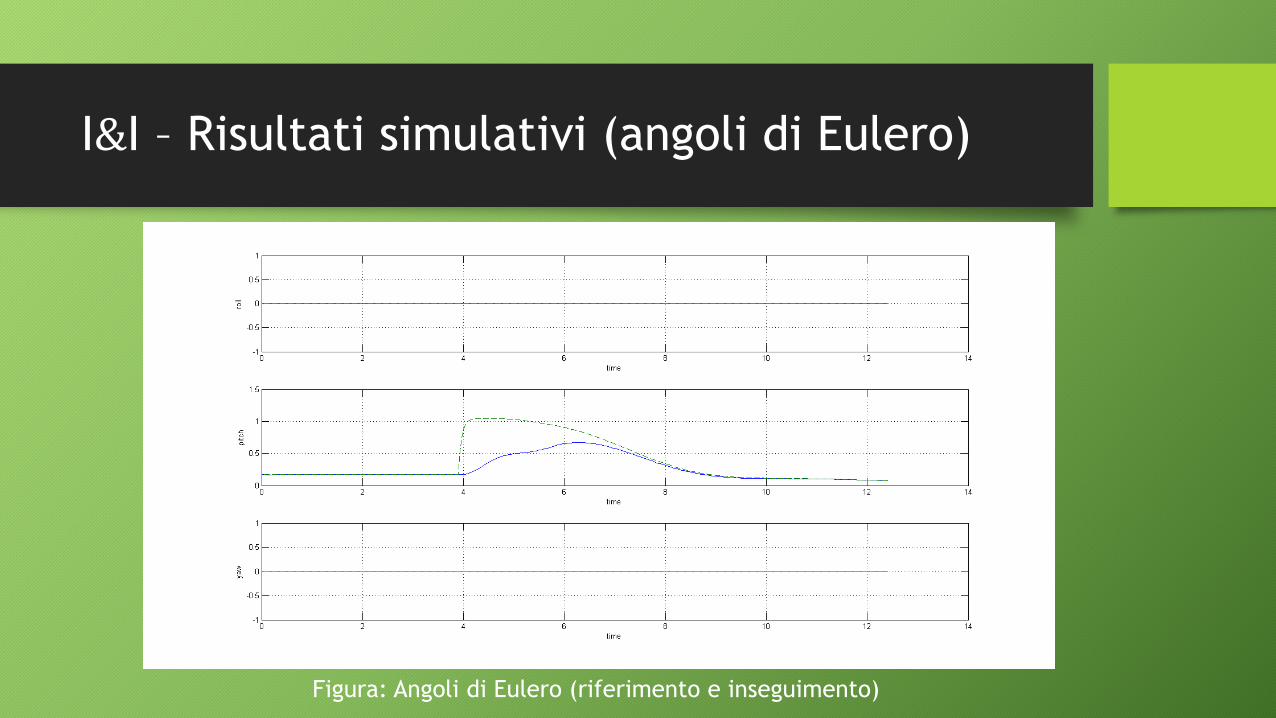
I&I – Risultati simulativi (angoli di Eulero)
Figura: Angoli di Eulero (riferimento e inseguimento)
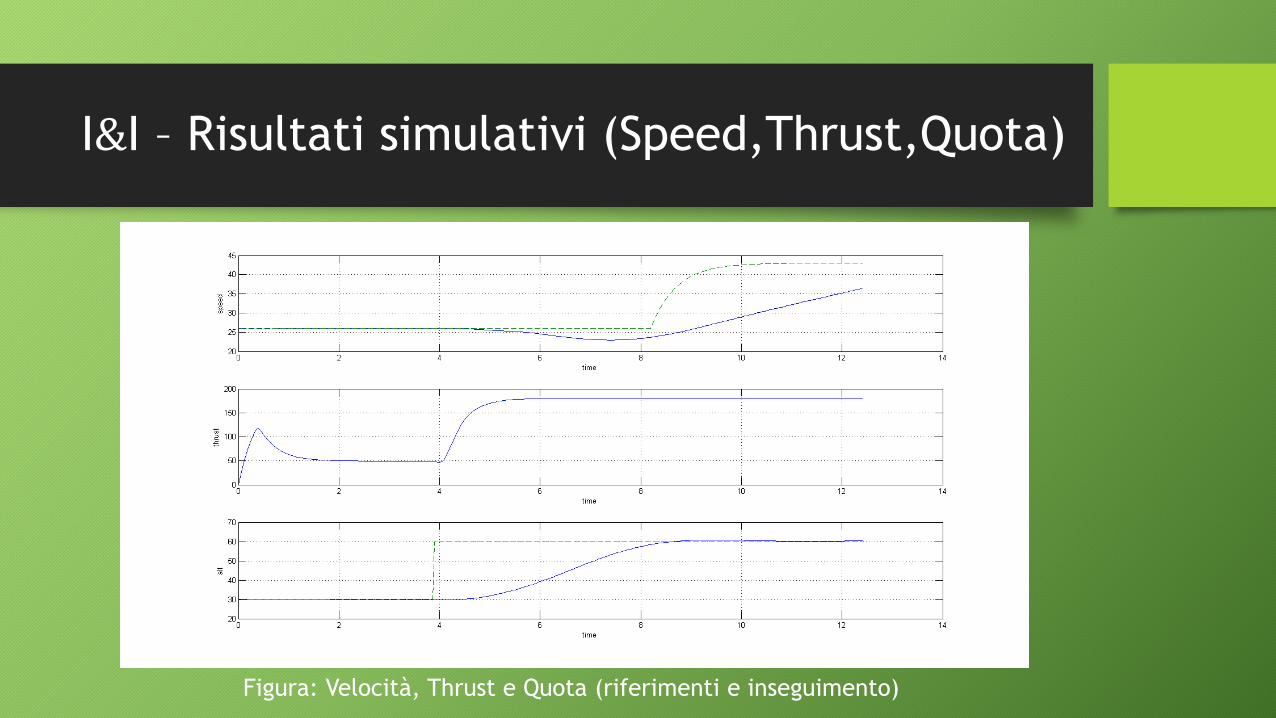
I&I – Risultati simulativi (Speed,Thrust,Quota)
Figura: Velocità, Thrust e Quota (riferimenti e inseguimento)
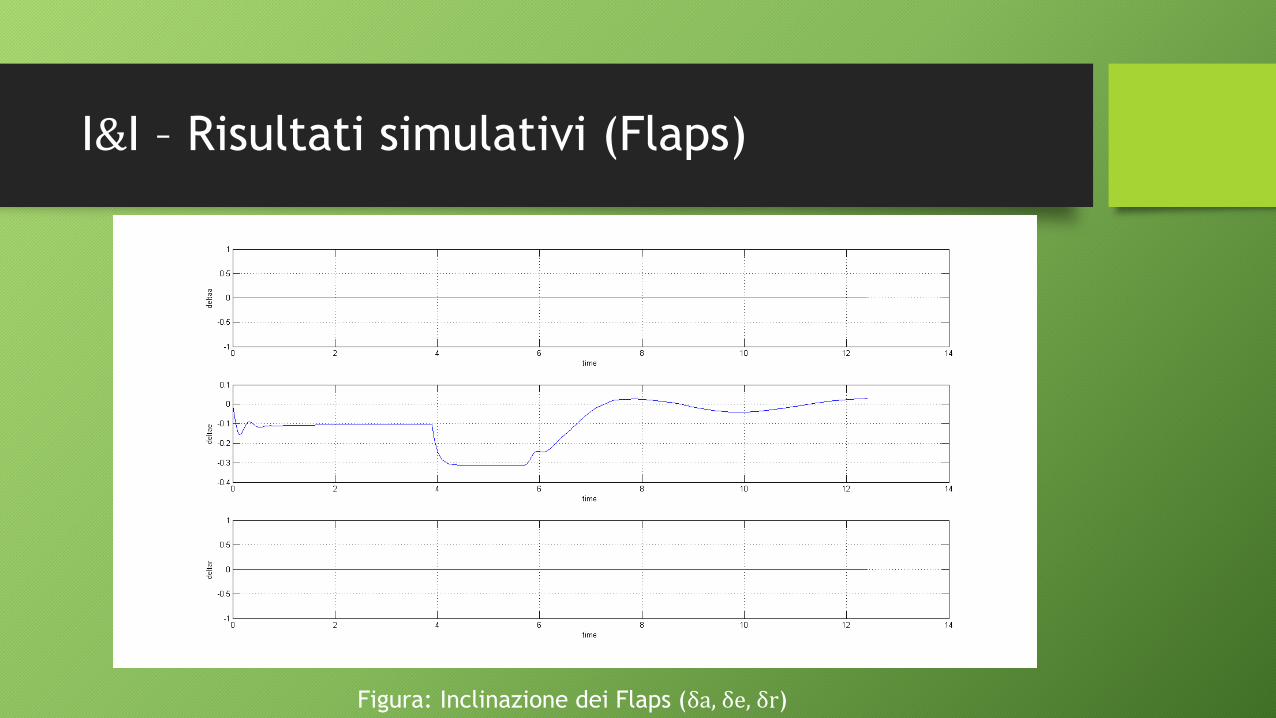
I&I – Risultati simulativi (Flaps)
Figura: Inclinazione dei Flaps (δa, δe, δr)
Linearizzazione
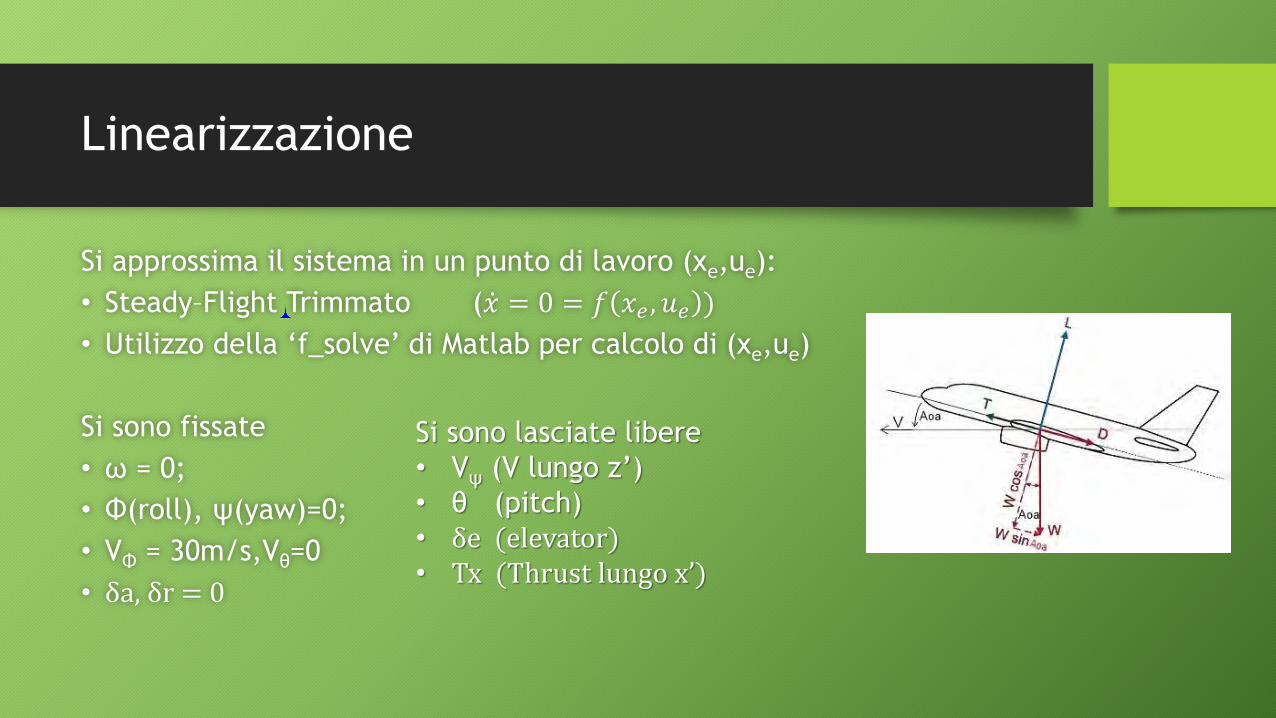
Si approssima il sistema in un punto di lavoro (xe,ue):
• Steady–Flight Trimmato ( 𝑥 = 0 = 𝑓 𝑥𝑒 , 𝑢𝑒 )
• Utilizzo della ‘f_solve’ di Matlab per calcolo di (xe,ue)
Si sono fissate
• ω = 0;
• Φ(roll), ψ(yaw)=0;
• VΦ = 30m/s,Vθ=0
• δa, δr = 0
Si sono lasciate libere
• Vψ (V lungo z’)
• θ (pitch)
• δe (elevator)• Tx (Thrust lungo x’)
danielecarnevale
Barra
danielecarnevale
Testo inserito
trimm e basta? è italianizzato trimmato, o direttamente dire che è una coppia di lavoro?
Linearizzazione
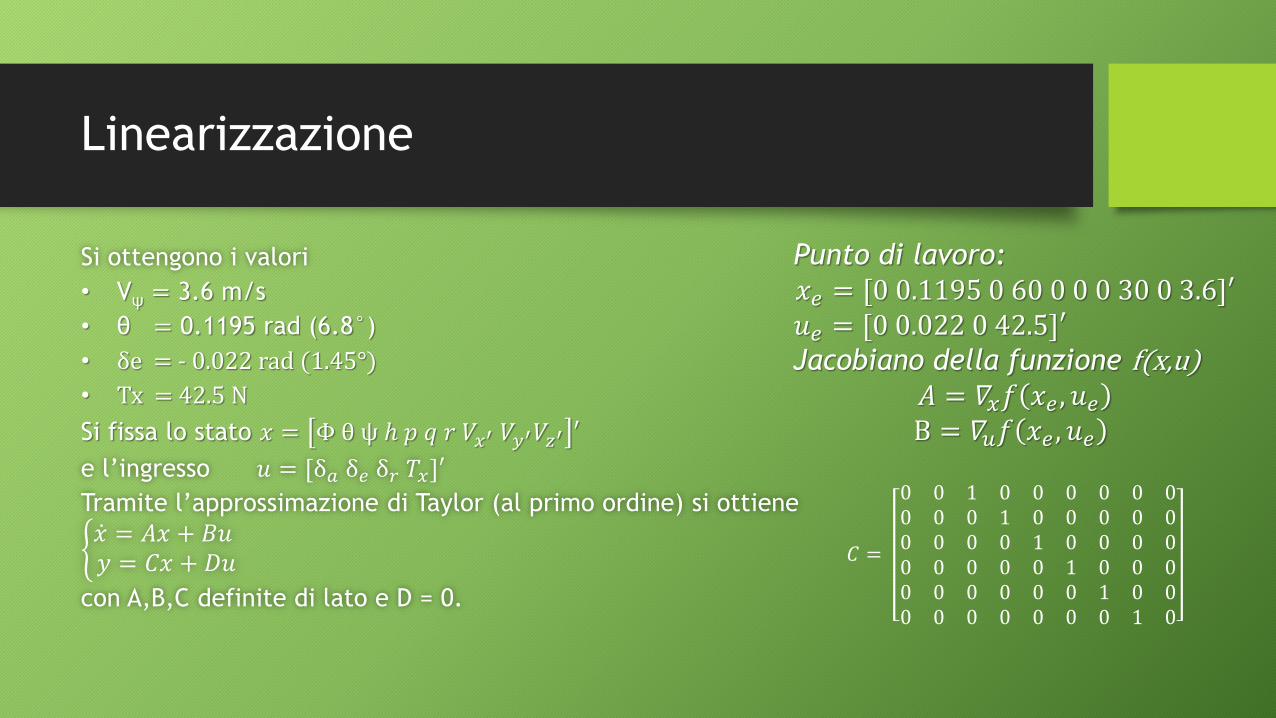
Si ottengono i valori
• Vψ = 3.6 m/s
• θ = 0.1195 rad (6.8°)
• δe = - 0.022 rad (1.45°)
• Tx = 42.5 N
Si fissa lo stato 𝑥 = Φ θ ψ ℎ 𝑝 𝑞 𝑟 𝑉𝑥′ 𝑉𝑦′𝑉𝑧′ ′
e l’ingresso 𝑢 = [δ𝑎 δ𝑒 δ𝑟 𝑇𝑥]′
Tramite l’approssimazione di Taylor (al primo ordine) si ottiene
𝑥 = 𝐴𝑥 + 𝐵𝑢𝑦 = 𝐶𝑥 + 𝐷𝑢
con A,B,C definite di lato e D = 0.
Punto di lavoro:
𝑥𝑒 = [0 0.1195 0 60 0 0 0 30 0 3.6]′𝑢𝑒 = [0 0.022 0 42.5]′Jacobiano della funzione f(x,u)
𝐴 = 𝛻𝑥𝑓 𝑥𝑒 , 𝑢𝑒B = 𝛻𝑢𝑓 𝑥𝑒 , 𝑢𝑒
𝐶 =
0 0 1 0 0 0 0 0 00 0 0 1 0 0 0 0 00 0 0 0 1 0 0 0 00 0 0 0 0 1 0 0 00 0 0 0 0 0 1 0 00 0 0 0 0 0 0 1 0
Osservatore e legge di controllo
Serve per stimare l’intero stato del sistema, partendo dalle misure dello stato 𝑦 𝑡 disponibili, dalla conoscenza delle matrici A,B,C,D del sistema e dell’ingresso 𝑢(𝑡)
ξ(𝑡) = 𝐻ξ 𝑡 + 𝑅𝑢 𝑡 + 𝑉𝑦(𝑡)
Sotto opportune condizioni, l’errore di stima 𝑒 𝑡 = 𝑥 𝑡 − ξ 𝑡
converge a zero e l’osservatore diventa
ξ 𝑡 = 𝐴ξ 𝑡 + 𝐵𝑢 𝑡 + 𝑉(𝑦 𝑡 − (𝐶ξ 𝑡 + 𝐷𝑢 𝑡 )
una copia del sistema più un ingresso che è la differenza tra le uscite del sistema vero e quello stimato, pesato tramite la matrice V.
Osservatore e legge di controllo (2)
Dopo aver ricostruito lo stato, si può effettuare una stabilizzazione in retroazione dallo stato, tramite una opportuna legge di controllo
𝑢 𝑡 = 𝐹ξ 𝑡 + 𝑣(𝑡)
È possibile esprimere il sistema complessivo 𝑥 𝑡 , 𝑒 𝑡 come segue 𝑥(𝑡) 𝑒(𝑡)
=𝐴 + 𝐵𝐹 −𝐵𝐹
0 𝐴 − 𝑉𝐶
𝑥(𝑡)𝑒(𝑡)
+𝐵0𝑣(𝑡)
Per stabilizzare il sistema nell’origine dello spazio di stato occorre che gli autovalori di (A-VC) e (A +BF) siano a parte reale negativa.
Osservatore e legge di controllo (3)
Dopo un tempo t sufficientemente grande, l’errore 𝑒 𝑡 = 0, ed
estraendo la prima delle due equazioni, si ha 𝑥 = 𝐴 + 𝐵𝐹 𝑥 𝑡 + 𝐵𝑣(𝑡)
e ricordando la definizione di punto di equilibrio (𝑓 𝑥𝑒 , 𝑢𝑒 = 0), si trova l’ingresso di equilibrio funzione dello stato desiderato 𝑥𝑒
𝑣𝑒 = −𝐵−1 𝐴 + 𝐵𝐹 𝑥𝑒
ovvero una legge di controllo statica in retroazione dallo stato.
danielecarnevale
Barra
danielecarnevale
Testo inserito
Assumendo
danielecarnevale
Barra
danielecarnevale
Testo inserito
la legge di controllo diventa
danielecarnevale
Barra
danielecarnevale
Testo inserito
x_{des}, anche sotto, devi far capire che questo è un'ingresso
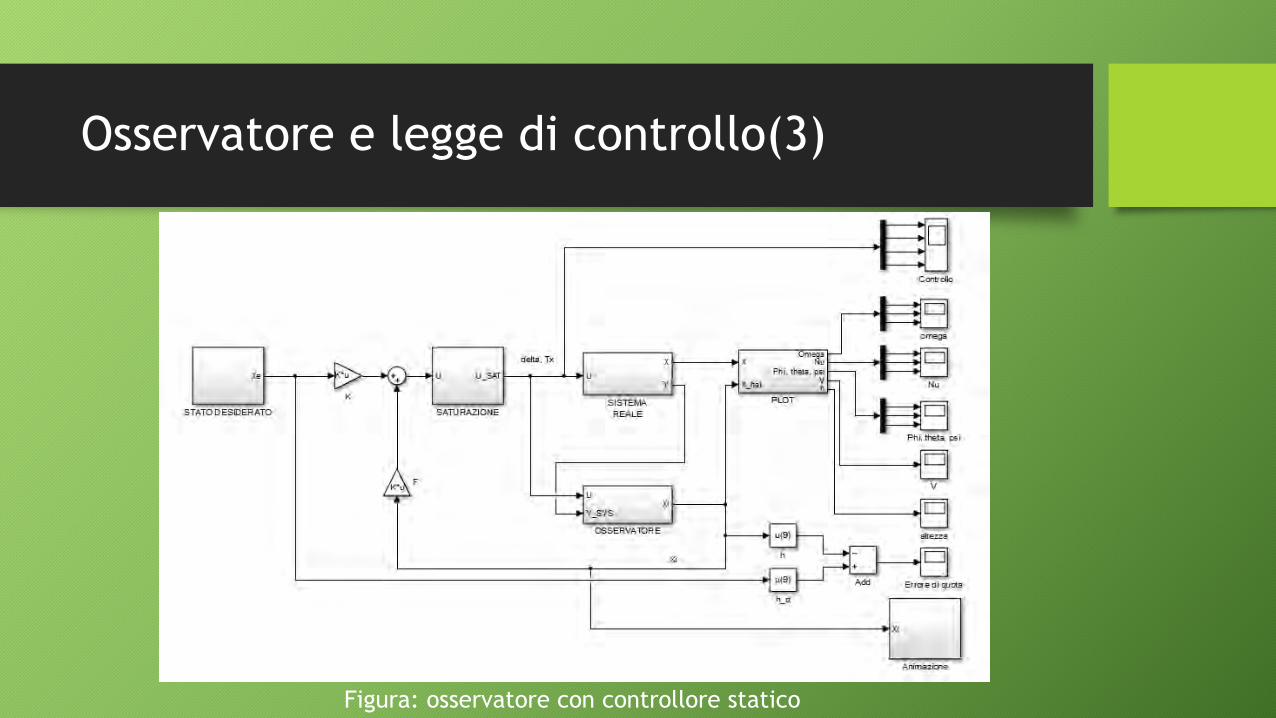
Osservatore e legge di controllo(3)
Figura: osservatore con controllore statico
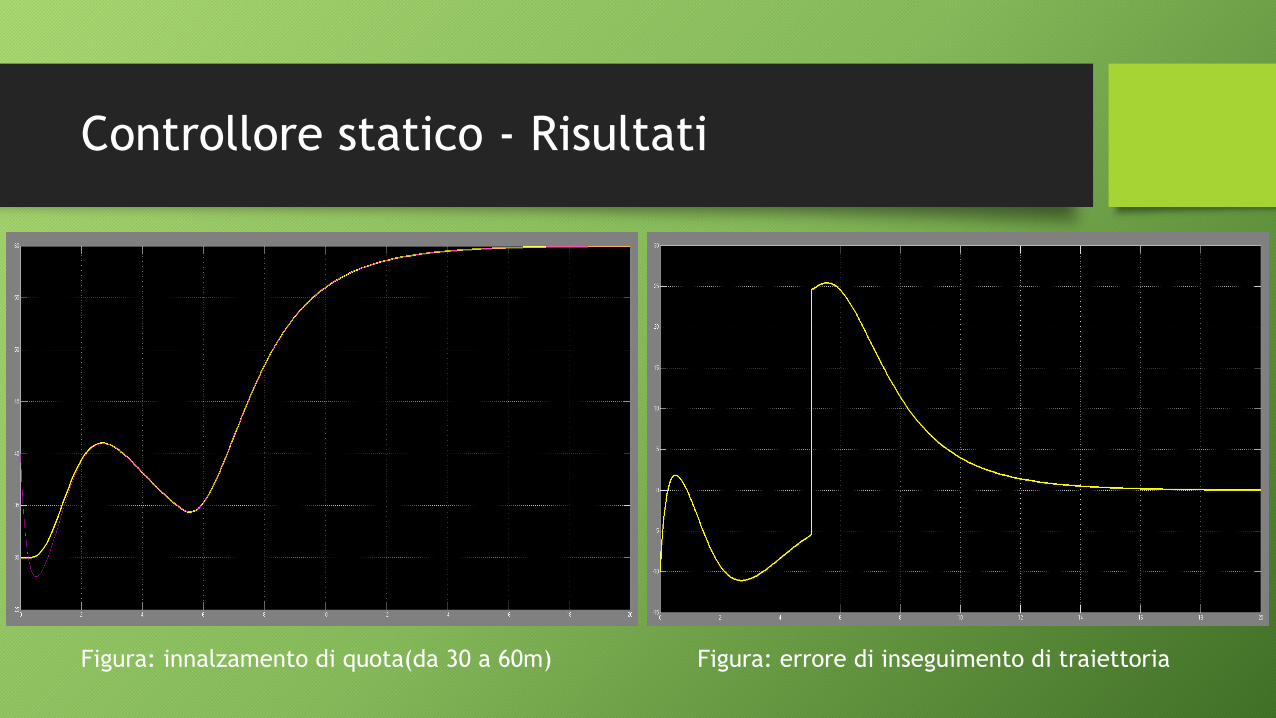
Controllore statico - Risultati
Figura: innalzamento di quota(da 30 a 60m) Figura: errore di inseguimento di traiettoria
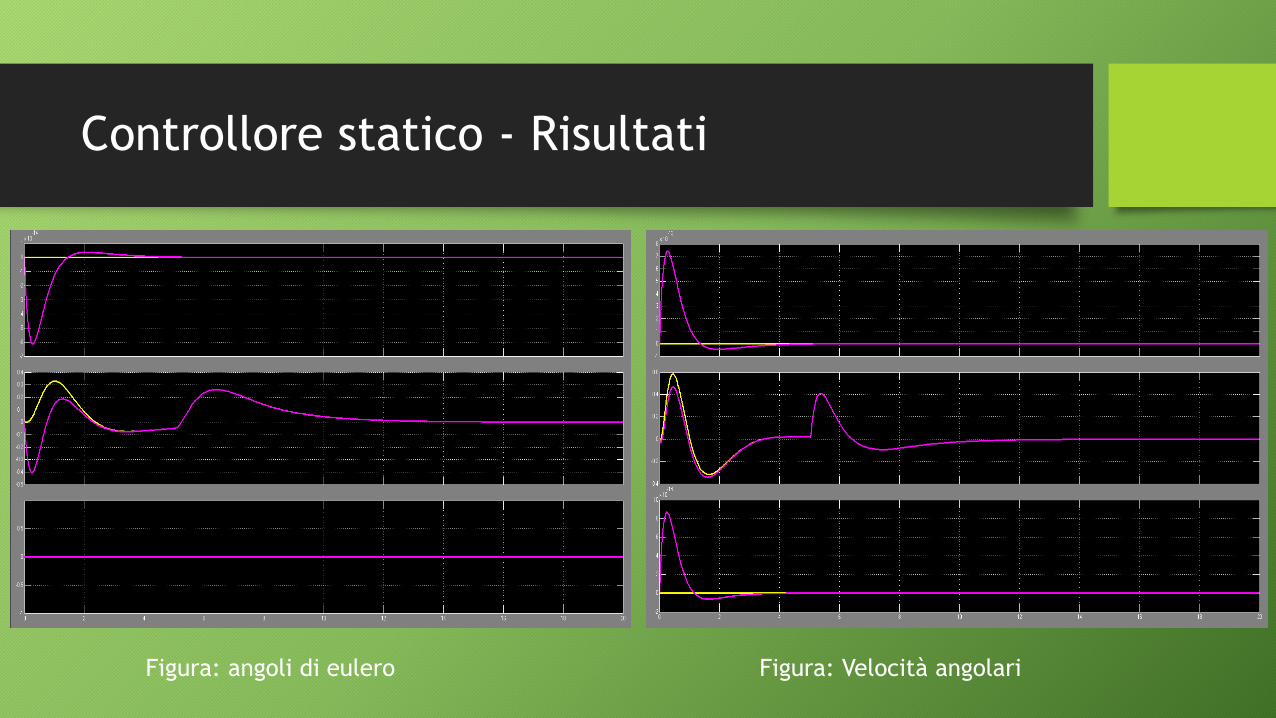
Controllore statico - Risultati
Figura: angoli di eulero Figura: Velocità angolari
Conclusioni e sviluppi futuri
Immersion & Invariance
• Uso combinato con osservatori non lineari, con misure rumorose.
• Estensione anche per i VTOL
Controllore statico
• Pianificazione oculata delle matrici V e F
• Linearizzazione in n punti di lavoro con n controllori ad hoc
• Switch tra un linearizzato e il successivo
danielecarnevale
Barra
danielecarnevale
Testo inserito
...hanvedi....usa calcolo
danielecarnevale
Barra
danielecarnevale
Testo inserito
linearizzato
Fine
Grazie per l’attenzione!!! =)