Control Systems - Home | Lehigh · PDF file · 2016-02-02Control Systems Lecture 3...
6
1 Classical Control – Prof. Eugenio Schuster – Lehigh University 1 Control Systems Lecture 3 Block Diagrams Classical Control – Prof. Eugenio Schuster – Lehigh University 2 Impulse Response ) ( ) ( ) ( 0 t u d t u = − ∫ ∞ τ τ δ τ h ) (t y ) (t u τ τ τ d t h u t y ) ( ) ( ) ( 0 ∫ ∞ − = Diracs delta: Integration is a limit of a sum ⇓ u(t) is represented as a sum of impulses By superposition principle, we only need unit impulse response System Response: ( ) τ − t h Response at t to an impulse applied at τ of amplitude u(τ )
Transcript of Control Systems - Home | Lehigh · PDF file · 2016-02-02Control Systems Lecture 3...

1
Classical Control – Prof. Eugenio Schuster – Lehigh University 1
Control Systems
Lecture 3 Block Diagrams
Classical Control – Prof. Eugenio Schuster – Lehigh University 2
Impulse Response
)()()(0
tudtu =−∫∞
ττδτ
h )(ty)(tu
τττ dthuty )()()(0∫∞
−=
Dirac�s delta:
Integration is a limit of a sum ⇓
u(t) is represented as a sum of impulses
By superposition principle, we only need unit impulse response
System Response:
( )τ−th Response at t to an impulse applied at τ of amplitude u(τ )

2
Classical Control – Prof. Eugenio Schuster – Lehigh University 3
Impulse Response
Convolution: )()(})()({0
sUsHdthu =−∫∞
τττL
H
)()()( sUsHsY =
)(sY)(sUs-domain:
h )(ty)(tu
τττ dthuty )()()(0∫∞
−=
t-domain:
The system response is obtained by convolving the input with the impulse response of the system.
The system response is obtained by multiplying the transfer function and the Laplace transform of the input.
)()(1)()()( sHsYsUttu =⇒=⇒=δ
)()()()( thtyttu =⇒=δ
Impulse response
Impulse response
Classical Control – Prof. Eugenio Schuster – Lehigh University 4
Block Diagrams
Series: 1G 2G
1G
2G
+
+
Parallel:
21GGG =
21 GGG +=
3
Classical Control – Prof. Eugenio Schuster – Lehigh University 5
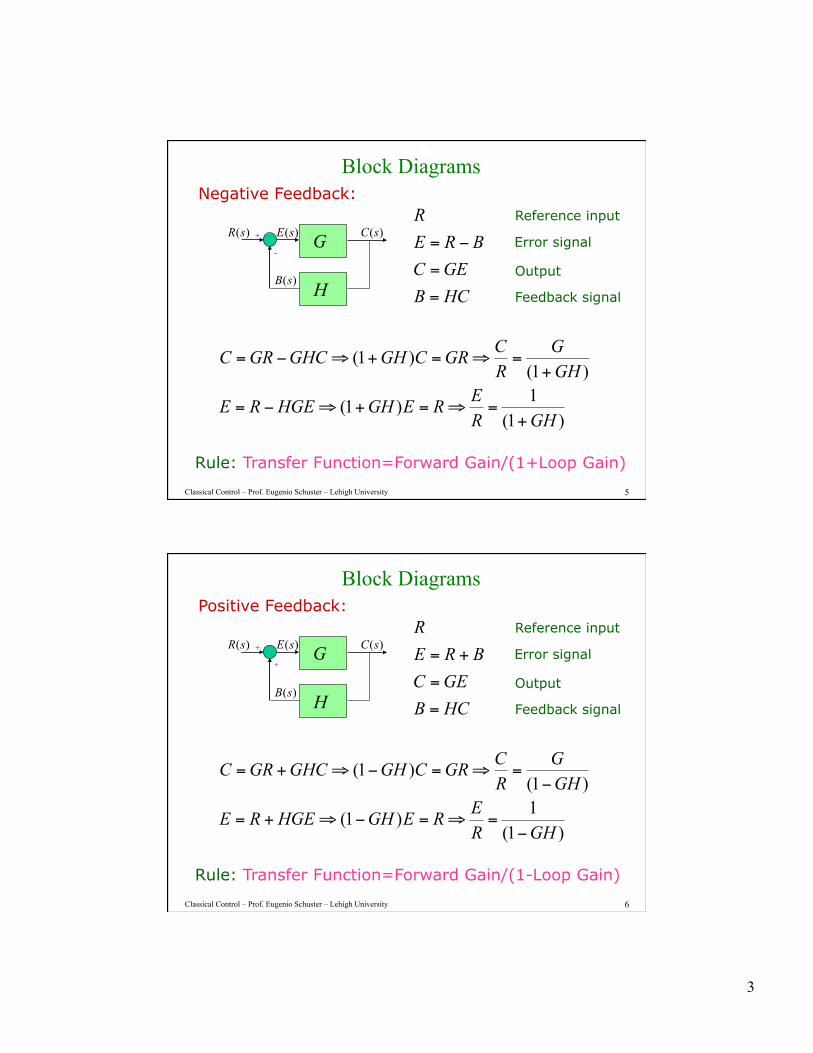
Block Diagrams Negative Feedback:
G-
+
H
)(sR )(sE )(sC
)(sBHCBGEC
BRER
=
=
−= Error signal
Output
Feedback signal
Reference input
)1()1(
GHG
RCGRCGHGHCGRC
+=⇒=+⇒−=
)1(1)1(GHR
EREGHHGERE+
=⇒=+⇒−=
Rule: Transfer Function=Forward Gain/(1+Loop Gain)
Classical Control – Prof. Eugenio Schuster – Lehigh University 6
Block Diagrams Positive Feedback:
G+
+
H
)(sR )(sE )(sC
)(sBHCBGEC
BRER
=
=
+= Error signal
Output
Feedback signal
Reference input
)1()1(
GHG
RCGRCGHGHCGRC
−=⇒=−⇒+=
)1(1)1(GHR
EREGHHGERE−
=⇒=−⇒+=
Rule: Transfer Function=Forward Gain/(1-Loop Gain)
4
Classical Control – Prof. Eugenio Schuster – Lehigh University 7
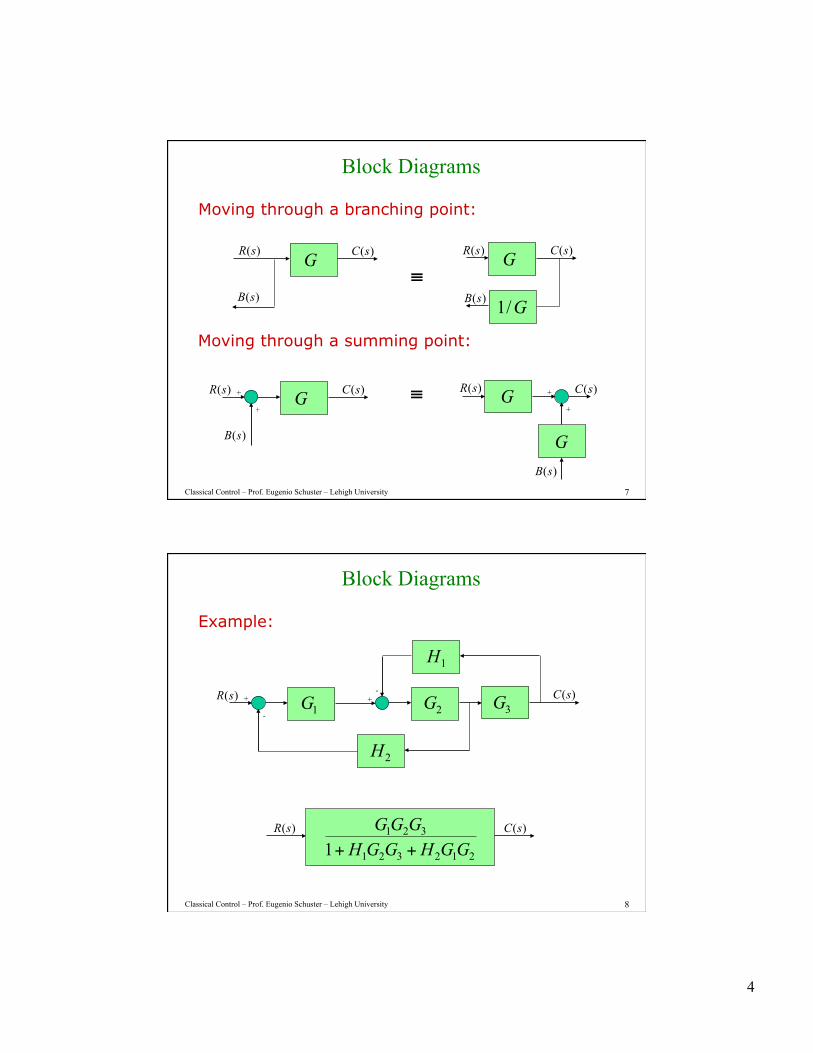
Block Diagrams
Moving through a branching point:
G
G/1
)(sR )(sC
)(sB
G)(sR )(sC
)(sB
Moving through a summing point:
G+
+ )(sR )(sC
)(sB
G+
+
G
)(sR )(sC
)(sB
≡
≡
Classical Control – Prof. Eugenio Schuster – Lehigh University 8
Block Diagrams
1G-
+ )(sR )(sC2G 3G+
2H
1H
-
212321
321
1 GGHGGHGGG++
)(sC)(sR
Example:

5
Classical Control – Prof. Eugenio Schuster – Lehigh University 9
Mason�s Rule
)(sU )(sY1H 2H 3H
4H
6H
5H 7H
1 2 3 4
1H+
+ )(sU )(sY2H 3H+
5H
6H
+ +
+
7H
+ +
4H
nodes branches
Signal Flow Graph
Classical Control – Prof. Eugenio Schuster – Lehigh University 10
Mason�s Rule
∑ ΔΔ
==i
iiGsUsYsG 1)()()(
path forward ith the touch not does that graph the of part the for of value
touch not do that loops three possible all of products gain
touch) not do that loops two possible all of products gain
gains) loop (all
tdeterminan system the path forward ith the of gain
Δ=Δ
+
−
+
=
=Δ
=
∑∑∑
i
i
-
G
)(
(
1
Path: a sequence of connected branches in the direction of the signal flow without repetition Loop: a closed path that returns to its starting node Forward path: connects input and output
6
Classical Control – Prof. Eugenio Schuster – Lehigh University 11
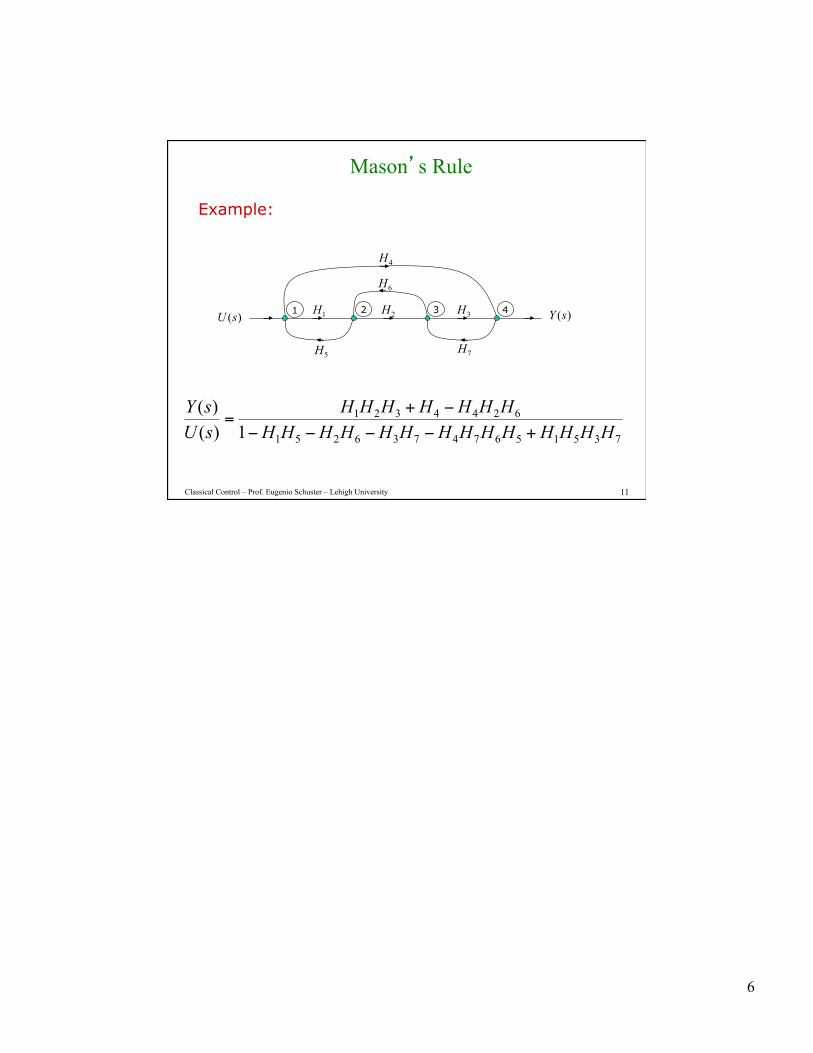
Mason�s Rule
)(sU )(sY1H 2H 3H
4H
6H
5H 7H
1 2 3 4
73515674736251
6244321
1)()(
HHHHHHHHHHHHHHHHHHHHH
sUsY
+−−−−−+
=
Example: