Continuous Dynamic Simulation for Morphing Wing …
21
+ President, Fellow AIAA ± Professor, MAE Dept. ASU, Associate Fellow AIAA * Vice President, Associate Fellow AIAA α Formally Post Doctoral Fellow, Now Engineering Specialist at ZONA ¶ Engineering Specialist, Member AIAA π Professor, MAE Dept. UCI, Associate Fellow AIAA β Principal Research Aerospace Engineer δ Aerospace Research Engineer Continuous Dynamic Simulation for Morphing Wing Aeroelasticity D.D. Liu + , P.C. Chen * , Z. Zhang ¶ , Z. Wang ¶ , S. Yang ¶ , D.H. Lee ¶ ZONA Technology, Inc. M. Mignolet ± and K. Kim α Arizona State University F. Liu π University of California, Irvine N. Lindsley β , P. Beran δ Air Force Research Laboratory, WPAFB, OH The morphing of an air vehicle is to change its shape and size substantially during flight. Thus, the morphing vehicle is to achieve a broader range of operational modes, all of which will maximize the vehicle performance throughout its mission profile. The dream of human flight has been to mimic birds or insect flights in similar manner since the days of Leonardo da Vinci. Our current aeronautical technology brings us closer to such a feat by vehicle morphing. This is evidenced by the ongoing DARPA contracts on designs of a Sliding-skin concept (in-plane morph) and a Folding wing concept (out-of-plane morph). [1-4]. However, the R&D of its engineering design/analysis methodology appears to be lagging behind. One such important methodology is the computational capability to assess the flight dynamics and aeroelastic instability, or stability, of a morphing vehicle during the course of its morphing motion. Figure 1. Various morphing vehicles and MAVs 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference<br>17th 4 - 7 May 2009, Palm Springs, California AIAA 2009-2572 Copyright © 2009 by ZONA Technology, Inc. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission.
Transcript of Continuous Dynamic Simulation for Morphing Wing …

+ President, Fellow AIAA ± Professor, MAE Dept. ASU, Associate Fellow AIAA * Vice President, Associate Fellow AIAA α Formally Post Doctoral Fellow, Now Engineering Specialist at ZONA ¶ Engineering Specialist, Member AIAA π Professor, MAE Dept. UCI, Associate Fellow AIAA β Principal Research Aerospace Engineer δ Aerospace Research Engineer
Continuous Dynamic Simulation for Morphing Wing Aeroelasticity
D.D. Liu+, P.C. Chen*, Z. Zhang¶, Z. Wang¶, S. Yang¶, D.H. Lee¶ ZONA Technology, Inc.
M. Mignolet± and K. Kimα Arizona State University
F. Liuπ
University of California, Irvine
N. Lindsleyβ, P. Beranδ Air Force Research Laboratory, WPAFB, OH
The morphing of an air vehicle is to change its shape and size substantially during flight.
Thus, the morphing vehicle is to achieve a broader range of operational modes, all of which will maximize the vehicle performance throughout its mission profile. The dream of human flight has been to mimic birds or insect flights in similar manner since the days of Leonardo da Vinci. Our current aeronautical technology brings us closer to such a feat by vehicle morphing. This is evidenced by the ongoing DARPA contracts on designs of a Sliding-skin concept (in-plane morph) and a Folding wing concept (out-of-plane morph). [1-4]. However, the R&D of its engineering design/analysis methodology appears to be lagging behind. One such important methodology is the computational capability to assess the flight dynamics and aeroelastic instability, or stability, of a morphing vehicle during the course of its morphing motion.
Figure 1. Various morphing vehicles and MAVs
50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference <br>17th4 - 7 May 2009, Palm Springs, California
AIAA 2009-2572
Copyright © 2009 by ZONA Technology, Inc. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission.

American Institute of Aeronautics and Astronautics
Page 2 of 21
AFRL has strong interests in establishing programs from Hypersonic vehicles for long-range strike/long-endurance surveillance vehicles to Micro Aerial Vehicles (MAV). Both would attain improved performance characteristics if they were designed with morphing concepts. For example, wing morphing could help reduce wave drag, increase L/D thus enhancing flight endurance and extending range for a supersonic/hypersonic vehicle whereas morphing into a low aspect ratio wing configuration could largely promote its agility while in maneuver. Morphing could also help stabilize MAV when encountering strong wing/gust environment in a typical low-Reynolds number flight. Although uncommon in their flight regimes/environments, these vehicles share commonality in terms of structural flexibility and potential aeroelastic instability due to morphing motions.
Central in the problem is that the aerodynamics, structures, and their interaction are highly time-variant during the course of morphing motion. Currently, proper and effective integrated computational tools to handle these types of aerodynamic/structural nonlinearities and their interaction do not seem to be available. While their counterpart linear methods are being developed [5-8], the nonlinear methods for morphing applications are warranted.
Therefore, the purpose of this paper is to present the preliminary study of a continuous dynamic simulation of nonlinear aerodynamic-nonlinear structures interactions (NANSI) methodology for morphing-wing aeroelasticity.
In the articles that follow, we will discuss our NANSI methodology for morphing-wing in proper order to resolve such technical challenges in continuous dynamic simulation. These include: i) nonlinear structural dynamics using structural FEM reduced-order-modeling (ROM), ii) morphing dynamics using a substructuring technique, iii) nonlinear aerodynamics using 2 different innovative grid schemes, iv) direct time simulation NANSI method for flutter/LCO in conjunction with Euler/solvers, v) nonlinear aeroelastic ROM (or the ROM-ROM) method for rapid computational aeroelastic analysis in time domain.
I. Nonlinear Structural Dynamics Nonlinear Structural Modeling—Reduced Order Modeling (ROM) ELSTEP/FAT [9-11]
ELSTEP/FAT is a Reduced Order Modeling (ROM) strategy of geometrically nonlinear structures which has been proposed to replace full finite element models. [9-11] This strategy has been introduced by Muravyov and Rizzi at NASA Langley Research Center and further developed by ZONA and Arizona State University for the estimation of the response, displacements and stresses, and fatigue life of panels subjected to a combined strong random acoustic loading and steady thermal effects. The approach is summarized as follows: the equations of motion are first transformed in terms of generalized modal coordinates, and the nonlinear stiffness force vector is expressed as the sum of quadratic and cubic terms of the modal coordinates along with nonlinear stiffness coefficients. By prescribing particular Figure 2. Flow Chart of ELSTEP displacement fields, a series of inverse linear and nonlinear static problems are solved to
Aircraft Structural FiniteElement ModelMSC.NASTRAN file
Linear Vibration ModesMSC.NASTRAN SOL 103
Nonlinear Static AnalysesMSC.NASTRAN SOL 106
Basis Vectors for DisplacementReduced Order Model
Computation of Nonlinear ForcesMSC.NASTRAN SOL 106
ROM Nonlinear StiffnessCoefficients
ROM
ROM Mass, Damping andLinear Stiffness Matrices
φi
φi
Fictitious Mass

American Institute of Aeronautics and Astronautics
Page 3 of 21
determine the nonlinear stiffness coefficients, thereafter the ROM obtained. While the ELSTEP procedure is applicable to any commercial finite element program having a geometrically nonlinear static analysis capability, it is implemented mainly with MSC.Nastran due to its widespread use in the aerospace industry. A flowchart showing the ELSTEP procedure using MSC.Nastran is presented in Figure 1.2. Once the reduced order modeling of the dynamic system is established, one could use it to perform a variety of analyses, e.g., random vibration analysis, deterministic loading analysis. In this proposal, the ROM will be coupled with a GBCC Euler solver to conduct nonlinear aeroelastic analyses. Nonlinear Equations of Motion
Proceeding with an MSC.Nastran nonlinear finite element modeling, the equations of motion of a flexible structure with geometric nonlinearities can be generated as follows:
( ) ( )1M C K+ + + =NLu u u F u F (1)
where M, C, K are the mass, proportional damping, and linear stiffness matrices, respectively, and u is the displacement response vector and F is the external force term, which will be provided by the GBCC Euler solver. The nonlinear restoring force vector NLF can be expressed as the sum of second and third order terms of u. Note that the elements of NLF are not explicitly available in MSC.Nastran, which only determines the tangential stiffness matrix ( )1K d du+ NLF as necessary. When displacements are small, the second and third order nonlinear terms become negligible and the total stiffness-related force vector is reduced to the regular linear term Ku.
To develop a reduced order model for Equation (1), the following modal coordinate transformation is assumed:
= Φu q (2)
where Φ is the basis vectors (e.g., eigenvectors obtained from the linear free-vibration problem of Equation (1)), q is the vector of the generalized modal coordinates, and its time dependence is implied.
Substituting Equation (2) into Equation (1) and mutiplying both sides by TΦ yield the following:
( )M C K+ + + =NLq q q F q F (3)
Where
, , ,T T T TM M C C K K= Φ Φ = Φ Φ = Φ Φ = ΦF F (4)
Note that N denotes the total number of modes used. The nonlinear force vector in Equation (3) is further expressed in the form:
( ) ( ) ( )2 3
1 1
N N N N N
jk j k jkl j k lj k j j k j l k
q q q q q= = = = =
= +∑∑ ∑∑∑NLF q K K (5)
Determination of Nonlinear Stiffness Coefficients (ELSTEP)/FAT
The evaluation of the nonlinear stiffness coefficients ( )2jkK and ( )3
jklK can be achieved by the following procedure. Since NLF is not available from MSC.Nastran (even through DMAP alters) it is not possible to simply change coordinates as in Eq. (4), and a special procedure must be

American Institute of Aeronautics and Astronautics
Page 4 of 21
devised for the evaluation of the vectors ( )2K and ( )3K . The strategy implemented in ELSTEP/FAT relies on the determination of the applied nodal forces corresponding to prescribed nodal displacements in both linear and nonlinear static solution settings. The total nodal force TF may be written in physical coordinates as
( )T L NL c NL cK= + = +F F F u F u (6)
where cu is a prescribed physical nodal displacement vector, and LF and NLF are the linear and nonlinear contributions to the total nodal force.
LF is first obtained by prescribing cu in the linear static solution. TF is next obtained by prescribing cu in the nonlinear static solution. Finally, the nonlinear contribution NLF is obtained by subtracting LF from TF , i.e.,
( )NL c T L= −F u F F (7)
To illustrate the technique, one can begin by prescribing the displacement fields:
1 1 1 1cl cLq qϕ ϕ= + = −u u (8)
where 1ϕ is a particular mode. The nonlinear nodal force contributions NLF are determined using (7) after solving the linear
and nonlinear static solutions. These may be written in modal coordinates as
( ) ( ) ( )
( ) ( ) ( )
2 32 31 1 1 1 11 1 111 1
2 32 32 2 1 1 11 1 111 1
TNL NL
TNL NL
q q q
q q q
ϕ
ϕ
= Φ + = +
= Φ − = +
F F K K
F F K K (9)
where the sought stiffness coefficients ( )211K and ( )3
111K are vectors of length N. Since 1q is a known scalar, the coefficients can be determined from the resulting system (9) of 2N linear algabric equations. The remaining coefficients can be determined in an analogous manner.
A simliar technique can be employed to determine stiffness coefficients with two unequal lower indices, e.g., ( ) ( ) ( ), ,2 3 3
12 122 112K K K . By prescribing three different displacement fields
1 1 2
2 1 2
3 1 2
c 1 2
c 1 2
c 1 2
q qq qq q
ϕ ϕϕ ϕϕ ϕ
= + += − += + +
uuu
(10)
We can find out the corresponding nonlinear force vectors:
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
2 3 2 3 2 3 32 3 2 3 2 211 1 111 1 22 2 222 2 12 1 2 112 1 2 122 1 2
2 3 2 3 2 3 32 3 2 3 2 211 1 111 1 22 2 222 2 12 1 2 112 1 2 122 1 2
2 3 2 3 2 32 3 2 311 1 111 1 22 2 222 2 12 1 2 112
2 3 3
2 3 3
2 3
q q q q q q q q q q
q q q q q q q q q q
q q q q q q q
= + + + + + +
= − + − + − −
= + + − − −
NL1
NL2
NL3
F K K K K K K K
F K K K K K K K
F K K K K K K ( )32 21 2 122 1 23q q q+ K
(11)
Through Equations (11), we can obtain the coefficients ( ) ( )212 112, 3K K and ( )
1223K .
II. Morphing Wing Dynamics
A multi-body dynamic approach was undertaken to obtain the equations of motion of the wing in morphing. In this approach, each of the wing components is separately analyzed and the wing is formed through the assembly of these components while imposing some compatibility

American Institute of Aeronautics and Astronautics
Page 5 of 21
equations at their interfaces, see Fig. 3. Before addressing the derivation of the equations of motion of an arbitrary component, it was deemed important to first establish some physical requirements at the interfaces. The focus of this Phase I effort is on a morphing induced by the hinging of two or more components. Rotation around a hinge is only possible if the hinge line remains straight. Thus, to ensure an appropriate morphing, it will be required that the various components have rigid interfaces. It is worthwhile to recognize that rigid interfaces may also be necessary in other morphing strategies, e.g. a telescoping motion requires that the components perfectly match shape at their interfaces and thus a rigid interface condition is also appropriate in that case.
Figure 3. Separation of the wing into components with interfaces
Figure 4. Forces and Kinematics of Component i
Since the interfaces will be modeled as rigid sections, the force information required there reduces to a concentrated force and a concentrated moment. The kinematics of the interface is also simplified, requiring only the motion (position, velocity, and acceleration) of a single point C and an angular velocity ω at each interface. Under this condition, the loading acting on the component i is as shown in Fig. 4.
Component Wing Model Formulation The derivation of the equations of motion for the ith component, shown in Fig. 4, in arbitrary
large elastic deformations starts from the weak form of the field equation of nonlinear elasticity. This weak form can be expressed as in the reference frame as (summation is implied over repeated indices)
( )0 0 0 0
0 00 0
t
ii i ij jk i i i i
k
vv u d X F S d X v b d X v t dsX
ρ ρΩ Ω Ω ∂Ω
∂+ = +
∂∫ ∫ ∫ ∫ (13)
where S denotes the second Piola-Kirchhoff stress tensor, 0ρ is the density in the reference configuration, and 0b is the vector of body forces. All of these quantities are assumed to depend on the coordinates iX and are expressed in the reference configuration in which the structure occupies the domain 0Ω . The boundary, 0∂Ω , of the reference configuration domain 0Ω , is composed of two parts, 0
t∂Ω on which the tractions 0t are given (i.e. the domain on which the aerodynamics acts) and 0
u∂Ω on which the displacements are specified (i.e. the interfaces with the other components). Finally, ( )i Xν denote “trial functions” to be selected.
In applying Eq. (13) to the present problem, it is assumed that the deflection ( )iu X is the sum of rigid body motions (rotation and translation) generated by the body at the left interface and deformations. These deformations are further expressed as the sum ( ) ( )( )n
nq t U X (summation
Rigid interface
Compi
Compi+1Rigid interface
Compi
Compi+1
Compi
Compi+1
HingedCompi
Compi+1
Hinged
Left
RightFaero
Compi
CRia
iR ,ω
)2(,
)1(,
oiR
oiR FF
)2(,
)1(, , o
iLo
iL FF
icLa ,
iL,ω
Left
RightFaero
Compi
Left
RightFaero
Compi
CRia
iR ,ω
)2(,
)1(,
oiR
oiR FF
)2(,
)1(, , o
iLo
iL FF
icLa ,
iL,ω

American Institute of Aeronautics and Astronautics
Page 6 of 21
implied over n) where ( )( )nU X are appropriately selected mode shapes (basis function) and ( )nq t are the corresponding generalized coordinates.
In the present context of flexible deformations appended on rigid body motions, it is appropriate to select three different sets of trial functions. The first set is ( )i ilXν δ= , i.e. a pure translational displacement field, and the corresponding equation
( )
( )0
0(1) 0(1) ( ), ,
( ) ( ) ( )2
Lit
nL i R i aero G G nC
n n nn n
F F F ds m a m X m X q mX
q mX q mX mX
ω ω ω
ω ω ω ω
∂Ω
+ = + + × + × × +
⎡ ⎤+ × + × + × ×⎣ ⎦
∫ (14)
captures the rigid body translations aspects of the motion. The second set is ( )i iX Xν = and permits to describe the overall rotations (rigid body) of the component, that is
( )
( ) ( )0
0(2) 0(2) ( ), ,
( )( ) ( ) ( )2 .
Li LiLit
nL i R i aero G C C nC
nn n nn n
F F X F ds mX a I I q J
q I q I J I
ω ω ω
ω ω ω ω ω ω
∂Ω
+ = − × + × + + × −
⎡ ⎤+ + + + ×⎣ ⎦
∫ (15)
Describing the flexible motions is achieved by selecting the trial function as each of the mode shape in turn, i.e. ( ) ( )( )n
i iX U Xν = , to yield
( ) ( ) ( )
( ) ( ) ( )0 0
( ) ( ) ( )
( )( )( ) 0(1) 0(2) ( )
, ,
2 . . . . . .
. .
Li
Ri Rit
m m mmn n n mn nmn mn C
mnm ni
C R i C R iij jk i aerok
M q C q C G q mX a J I
U UF S d X U X F X F U F dsX s
ω ω ω ω ω ω ω
Ω ∂Ω
⎡ ⎤+ + + + − −⎣ ⎦
∂ ∂+ + + =
∂ ∂∫ ∫ (16)
In the above equations, the quantities LiCa ,
LiCI , m, GX denote the acceleration of the point
LiC , the mass moment of inertia of the component with respect to that point, the total mass of component i, and finally the position vector of its center of mass (undeformed) from LiC . Further,
( )nmX , ( )nJ , ( )nI , mnC , and mnG denote constant vectors/tensors that involve the mass distribution in the element and the mode shape(s).
Additionally, ,L iω ω= and the term ( )0
( )ni
ij jkk
U F S d XXΩ
∂∂∫ can be expressed as a 3rd order
polynomial in the generalized coordinate nq using the ELSTEP methodology. Equations (14)-(16) provide the basic equations to be solved for each component. The
structure is assembled by applying conditions on the forces and the kinematics at the interfaces. For the case of a hinge, the interface forces and moments are such that 0(1) 0(1)
, , 1L i R iF F −= − and 0(2) 0(2)
, , 1L i R iF F −= − (on the two direction perpendicular to the hinge line e). Further, , , 1L i R i eω ω −= + Γ where Γ is the relative angular velocity of the rotation around the hinge line. Example and Validation
The above formulation has been implemented for a 2-component wing model and the detailed validation of the approach is under way. One key issue being investigated is the selection of a good set of mode shapes (basis function) to represent the structural dynamic behavior of the entire wing in different morphing angles. For the outboard most component of the wing, it is clear that a simple set of cantilevered mode shapes is appropriate for the

American Institute of Aeronautics and Astronautics
Page 7 of 21
deflection. For the inboard component however, the applied interface forces transmit the inertial effects of the rigid body motions of the outboard component. In this light, we have currently adopted a set of modes for the inboard component which has a “loaded interface”, i.e. it corresponds to the inboard motion of the system composed of the inboard component to which a rigid outboard component is attached that exhibits the correct mass properties. The mode shapes and frequencies of the 2-component wing were obtained for a fixed hinge angle by considering the system either as a single structure or by the multi-body formulation. It was found that a combination of 10 modes of the inboard component and a similar count for the outboard component led to an excellent matching of the first 12 natural frequencies and modes of the combined structure, see Fig. 5. Note that the natural frequencies of the combined structures are obtained from a direct NASTRAN analysis by assuming Γ being at a fixed angle, and 0ω ω= = .
These first results demonstrate the applicability and efficiency of the proposed method to treat the morphing of the system which will be further address in the next reporting period.
(a) (b)
Figure 5. (a) Relative error in the predicted natural frequencies; (b) Relative norm of the error on the mode shapes
III. Nonlinear Aerodynamic Loads/Responses: Folding Wing
A 2-component wing model has been developed with which one can in principle properly account for linear/nonlinear structures for a folding wing using the ELSTEP procedure. Meanwhile, two CFD aerodynamic methods are being developed at ZONA for the morphing folding wing, in preparation for the eventual aeroelastic integration with the given structural model. These are the GBCC Method and the skewed/CartEuler Method. We will present the later methods applied to the folding wing model (shown below) and the resulting aerodynamic responses as follows.
0
0.001
0.002
0.003
0.004
0.005
0.006
0 2 4 6 8 10Mode Number
Rel
. Err
or N
at. F
req.
0 degree10 degree
0.00001
0.0001
0.001
0.01
0.10 2 4 6 8 10
Mode Number
Rel
. Nor
m o
f Mod
e D
iff.
0 degree10 degree

American Institute of Aeronautics and Astronautics
Page 8 of 21
Figure 6. Definition of the Folding
Wing. Figure 7. Skewed CartEuler Grid Suitable for Folding Wing
Morph. Skewed-CartEuler Methodology
The improvement made here is simply to skewed and align the y-grid with the inboard wing (main) surface. The Tangency boundary condition can thus be evaluated on the “exact” mean surfaces of the folding wing (Fig. 7). Since the skewed-grid relation is linear and exact, the skewed-CartEuler grid can be morphed readily to support real-time morphing computations. [see http://www.zonatech.com/download/NANSI_foldingwingmorph.avi]
Aerodynamic Loads Verifications
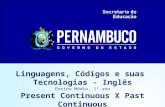
To validate the skewed-CartEuler aerodynamics loads on the folding wing at dihedral angle of 0 , 10 and 30Γ = at M = 0.95 and 0.6 and AoA =0° and 2°) are computed and compared with various methods. Fig. 8 and Fig. 9 show skewed-CartEuler results in fairly good agreement with results of CFL3D and ZAERO (M = 0.6 only) in terms of spanwise loadings.
Note that skewed-CartEuler has the advantage of time-domain capability for wing morphing as opposed to CFL3D, which requires to create a new body-fitted grid at each time step.
5.012.0
45.0
1.75
7.04.5
X Y
Z
Γ
X Y
Z
Γ = 0o
X Y
Z
Γ = 15o
X Y
Z
Γ = 30o
X Y
Z
Γ = 45o

American Institute of Aeronautics and Astronautics
Page 9 of 21
Figure 8. Comparison of Steady Spanwise
Loading of the Folding Wing (M = 0.60, Γ = 0°, 10°, 30°, α = 0°)
Figure 9. Comparison of Steady Spanwise
Loading of the Folding Wing (M = 0.60, Γ = 0°, 10°, 30°, α = 2°)
Time Simulation of Aerodynamic Responses we present examples: Morphing Aerodynamics Simulation for the Folding Wing with Prescribed Inboard Wing Movement
With the capability of the skewed-CartEuler, the morphing aerodynamics of the folding wing can be simulated. The inboard part of the wing moves with its dihedral angle Г prescribed according to Eq. (16a) or (16b) (see page 11). The outboard of the wing remains horizontal. The morphing begins from o oΓ 0 to 45= .
Y
L
0 2 4 6 8 10 12
0
0.1
0.2
0.3
0.4CFL3DCartEuler
M = 0.95, Γ = 30o
Y
L
0 2 4 6 8 10 12-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12CFL3DCartEuler
M = 0.95, Γ = 10o
Y
L
0 2 4 6 8 10 12
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1CFL3DCartEuler
M = 0.60, Γ = 10o
Y
L
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2 CartEulerZAERO
M = 0.60, α = 2 o, Γ = 0o
Y
L
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2 CFL3DCartEulerZAERO
M = 0.60, α= 2 o, Γ= 10o
Y
L
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2 CartEulerZAERO
M = 0.60, α = 2 o, Γ = 30o

American Institute of Aeronautics and Astronautics
Page 10 of 21
(a) Case A (M = 0.95, H = 20k Ft, Morphing within 20s)
(b) Case B (M=0.95, H = 20k Ft, Morphing within 1s)
Figure 10. Folding Wing Morph
Figure 11. Pressure Contours at Different Dihedral Angles during Morphing Cases studied:
• Case A (M = 0.95, H = 20k Ft, Morphing within 20 s), Fig. 10a Figure 1.10 shows the histories of lift coefficient for three different time-scheduling of Г. For all three runs, the real time solutions are close to the quasi-steady results. The pressure contours at three different dihedral angles are shown in Fig. 11 [also see http://www.zonatech.com/download/NANSI_foldingwingmorph1.avi and http://www.zonatech.com/download/NANSI_foldingwingmorph2.avi].
• Case B (M = 0.95, H = 20k Ft, Morphing within 1 s), Fig. 10b By reducing the morphing time period to 1s, the real-time histories of lift coefficient are quite different and deviate from the quasi-steady ones.
Consider the reduced frequency defined as 2K b TUπ ∞= (= morph speed/freestream speed), then the reduced frequencies for case A and B are 0.003 and 0.06, respectively. For real world morphing, the time scale is close to that of case A. So the real morphing is a kind of slow movement which yields almost quasi-steady aerodynamic response. Surprisingly it indicates that the aerodynamic transfer for the time-domain morphing is a constant, which reminds one of the incompressible thin airfoil formula 2LC πα= .
Time (s)
CL
0 5 10 15 20 25
0
0.05
0.1
0.151. Morph (no accel.), eq. (1.16a)2. Morph (λ = 0.6), eq. (1.16b)3. Morph (λ = - 0.4), eq. (1.16b)Quasi-steady for 1Quasi-steady for 2Quasi-steady for 3 Time (s)
Γ(d
eg)
0 5 10 15 200
10
20
30
40
50
601. Morph (no accel.), eq. (1.16a)2. Morph (λ = 0.6), eq. (1.16b)3. Morph (λ = - 0.4), eq. (1.16b)
Time (s)
CL
0 1 2 3-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
1. Morph (no accel.), eq. (1.16a)2. Morph (λ = 8), eq. (1.16b)3. Morph (λ = - 4), eq. (1.16b)
XY
Z
Γ = 5o
XY
Z
Γ = 20o
XY
Z
Γ = 40o

American Institute of Aeronautics and Astronautics
Page 11 of 21
IV. Direct Time-Simulation NANSI Method for Flutter/LCO A 2D case on a moving flap and a 3D case on a folding wing are presented below.
Continuous Dynamic Simulation of a Moving Flap with Prescribed Moving Time Scale: A Flutter/LCO Study of an Isogai’s 2D Aeroelastic Model [12,13]
To enhance our understanding of the impact of continuous dynamics of an aeroelastic system and its response we adopt an airfoil with moving flap emulating morph-like motions. Isogai’s 2D flutter model (Fig. 12) is selected with a flap (with hingeline located at ¾ chord) moving at a constant and variant speeds, according to the following prescribed time scale.
Steady Motion: 1 00
1
( - )( )t tt
δ δδ δ= + (16.a)
Exponential: 1
0 1
( )
1 1 0 - ( - )
1-( ) ( )1-
t t
t t
ete
λ
λδ δ δ δ− −
= − − (16b)
Note that the duration of transient is from t = to to t = t1 at t = to, the flap is placed at a flap angle ( )
0 0tδ = . The flap then moves according to the prescribed transient time scale and arrives at ( )
1tδ δ=
whence t = t1. Figure 13 shows computed steady pressures (using Euler) at flap deflection angles 0δ = and 1 10δ = and at two freesteam Mach numbers M = 0.78 (weak shock case) and M = 0.825 (strong shock case).
Now, three cases in aeroelastic responses due to a continuous moving flap versus that of a stationary flap at a fixed flap angle ( 1 10δ = ). (The latter response is usually referred as the quasi-steady solution). These cases include:
• Case A (M = 0.825, V* =0.661 and t1 = 2), Fig. 14 This system is neutrally stable+ at 0δ = all moving-flap solutions (with or without acceleration) converge to the quasi-steady solution at 1 10δ δ= = . Although each responses during the transient in the given time frame (t = 0 to t = 2) are largely varied from one to the others.
• Case B (M = 0.825, V* =0.75 and t1 = 3), Fig. 15 This system is a divergent one at 0δ = . The moving flap (in acceleration) solution, based on the exponential time scale (where is set to 4.0), also converges to the quasi-steady solutions at 1 10δ δ= = whence t1 = 3.
• Case C (M = 0.78, V* =1.045 and t1 = 6), Fig. 16 This system is neutrally stable at 0δ = . The moving flap solutions (with or without acceleration) all result in a “LCO-like” response of the same magnitude as that of the qausi-steady solutions.
− The present 2D moving flap system tends to provide some physical insight to the morphing folding wing system in that both increase the relative AoA as the flap angle δ or the morph angle Γ increases. The difference lies in that the response of the 2D system would be largely impacted by the freestream conditions.
− Consequently, the aeroelastic response due to a strong-shock means flow would all converges to a convergent quasi-steady solution, whereas that of a weak shock would
1 Note that V* is defined as V* = ( )*V b Uαω μ∞= . For a given Mach number we merely adjust U∞ to alter the
aeroelastic stability state of the system.

American Institute of Aeronautics and Astronautics
Page 12 of 21
result in LCO. This reminds one of the famous oscillatory flap solutions of Tijdeman [14,15] in transonic flow, where a steady strong shock will result in small (unsteady) shock excursion (type A) and weak shocks will result in large- amplitude (unsteady)
shock excursions (types B and C).
− Case C (the weak shock case) is not fully understood at present. More studies are required for this type of weak shock case.
− The cases considered here are for 2 modes (pitch & plunge) and within a short duration. Further investigations for cases
Figure 12. Isogai Flutter Model with Flap warrant multiple modes with larger transient time.
Figure 13. Steady Cps at Flap Angles 0δ = and 1 10δ =
Figure 14. Moving Flap with Strong Shock Wave (Case A: *0.825, 0.665, 2M V t= = = )
0.2a,0.60μ0.100ω,0.100ω
48.3γ, 8.1x
hα
2α α
−====
==hC
hK
ααK
αC
bba
αbx
cgea
h
NACA64A010 Airfoil with flap hingeline at ¾c
X/c
Cp
0 0.2 0.4 0.6 0.8 1
-1
-0.5
0
0.5
1
M=0.78M=0.825
Without flap deflection
X/c
Cp
0 0.2 0.4 0.6 0.8 1
-1.8
-1.2
-0.6
0
0.6
1.2
M=0.78M=0.825
10o flapdeflection
Time(s)
q 1
0 1 2 3 4
-0.1
-0.05
0
Without flap10o flapdeflectionWithflapmotion(λ=4.0)Withflapmotion(noaccel.)
X/c
Cp
0 0.2 0.4 0.6 0.8 1
-1.8
-1.2
-0.6
0
0.6
1.2
without flapdeflection10o flapdeflection
Cp*

American Institute of Aeronautics and Astronautics
Page 13 of 21
Figure 15. Moving Flap with Strong Shock Wave (Case B: *0.825, 0.75, 3M V t= = = )
Figure 16. Moving Flap with Weak Shock Wave (Case C: *0.78, 1.045, 6M V t= = = )
Aeroelastic Instability and LCO: Folding Wing
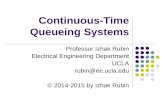
With the linear structure provided by the 2-component wing model and the skewed-CartEuler as the CFD tool, we proceeded with aeroelastic computation by time integration. Figures 17 – 22 presents 6 cases of Flutter/LCO results for a folding wing placed at 0 , 10 and 30Γ = at M = 0.9 and 0.95. These results are also displayed in Table 1, in which their comparison with ZTRAN results are presented. A quick glance at these computed results reveals the following:
− Morph Angle Effect The flutter/LCO speeds increases with increased Γ, in spite of M = 0.9 or 0.95. Increasing Γ will enhance the wing torsional stiffness, leading to the large flutter dynamic pressure (see Table 1).
− Nonlinear Aerodynamics Effect The flutter/LCO observed in all cases are subjected to nonlinear aerodynamics (skewed-CartEuler), as the wing-structure model is the linear option used at present.
− Hump Mode The flutter/LCO results obtained in Case E (Fig. 20) can be translated into a “hump mode” in terms of a “q” vs “g” dependency.
− Mach Number Effect The influence of Mach number cannot be easily detected with limited data at hand.
Time (s)
q 1
0 1 2 3 4
-0.1
-0.05
0
Without flapWithflapmotion(λ=4.0)
X/c
Cp
0 0.2 0.4 0.6 0.8 1
-1.8
-1.2
-0.6
0
0.6
1.2
without flapdeflection10o flapdeflection
Cp*
Time (s)
q 1
0 1 2 3 4 5 6
-0.3
-0.2
-0.1
0
0.1
0.2Without flap10o flapdeflectionWithflapmotion(λ=4.0)Withflapmotion(noaccel.)
X/c
Cp
0 0.2 0.4 0.6 0.8 1
-1.8
-1.2
-0.6
0
0.6
1.2
without flapdeflection10o flapdeflection
Cp*

American Institute of Aeronautics and Astronautics
Page 14 of 21
Figure 17. Case A: Folding Wing Flutter/LCO (Γ = 0°, M = 0.90)
Figure 18. Case B: Folding Wing Flutter/LCO (Γ = 10°, M = 0.90)
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.001
-0.0005
0
0.0005
0.001F = 4.4548, g = - 0.1520
M = 0.90, q ∞ = 551.7 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.001
-0.0005
0
0.0005
0.001F = 5.2771, g = - 0.1356
M = 0.90, q ∞ = 825.0 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.001
-0.0005
0
0.0005
0.001F = 6.4606, g = - 0.0078
M = 0.90, q ∞ = 1199.4 psfTime (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.6
-0.4
-0.2
0
0.2
0.4
0.6
F = 7.4198, g = 0.3590
M = 0.90, q ∞ = 1701.6 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.002
-0.001
0
0.001F = 5.4379, g = -0.2932
M = 0.90, q ∞ = 1199.3 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.002
-0.001
0
0.001F = 7.8124, g = -0.0404
M = 0.90, q ∞ =2363.0 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6
-0.04
-0.02
0
0.02
0.04 F = 8.1446, g = 0.0223
M = 0.90, q ∞ = 2679.6 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6
-0.4
-0.2
0
0.2
0.4 F = 8.4703, g = 0.0578
M = 0.90, q ∞ = 3218.7 psf

American Institute of Aeronautics and Astronautics
Page 15 of 21
Figure 19. Case C: Folding Wing Flutter/LCO (Γ = 30°, M = 0.90)
Figure 20. Case D: Folding Wing Flutter/LCO (Γ = 0°, M = 0.95)
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.002
-0.001
0
0.001
0.002F = 7.6118, g = - 0.1265
M = 0.90, q ∞ = 2363.0 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.002
-0.001
0
0.001
0.002F = 8.4556, g = - 0.0244
M = 0.90, q ∞ = 3218.7 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.002
-0.001
0
0.001
0.002F = 8.7724, g = - 0.0175
M = 0.90, q ∞ = 3625.0 psf
Time (s)Ti
pD
isp
/Spa
nb
0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2F1 = 9.3532, g1 = - 0.0462; F2 = 17.7132, g2 = 0.0653
M = 0.90, q ∞ = 4311.3 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.001
-0.0005
0
0.0005
0.001
F = 4.6265, g = - 0.0420
M = 0.95, q ∞ = 614.7 psfTime (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.001
-0.0005
0
0.0005
0.001
F = 5.4155, g = - 0.0162
M = 0.95, q ∞ = 919.2 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.6
-0.4
-0.2
0
0.2
0.4
0.6
F = 6.5169, g = 0.1255
M = 0.95, q ∞ = 1336.3 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.6
-0.4
-0.2
0
0.2
0.4
0.6F = 7.4213, g = - 0.0711
M = 0.95, q ∞ = 1895.9 psf

American Institute of Aeronautics and Astronautics
Page 16 of 21
Figure 21. Case E: Folding Wing Flutter/LCO (Γ = 10°, M = 0.95)
Figure 22. Case F: Folding Wing Flutter/LCO (Γ = 30°, M = 0.95)
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 60
0.002
0.004
0.006
F = 7.6551, g = - 0.0389
M = 0.95, q ∞ = 2632.9 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.002
0
0.002
0.004
0.006
0.008
0.01F = 8.1537, g = - 0.0048
M = 0.95, q ∞ = 2985.7 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2F = 8.8856, g = 0.0347
M = 0.95, q ∞ = 3586.3 psf
Time (s)
Tip
Dis
p/S
pan
b0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2F = 10.2234, g = 0.0026
M = 0.95, q ∞ = 4803.6 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.02
-0.01
0
0.01
0.02F = 7.3925, g = - 0.1039
M = 0.95, q ∞ = 2632.9 psfTime (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.02
-0.01
0
0.01
0.02F = 8.5068, g = - 0.0882
M = 0.95, q ∞ = 3586.3 psf
Time (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.02
-0.01
0
0.01
0.02F1 = 11.3279, g1 = 0.2291; F2 = 17.0840, g2 = 0.0063
M = 0.95, q ∞ = 4039.0 psfTime (s)
Tip
Dis
p/S
pan
b
0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2F1 = 9.3347, g1 = - 0.1697; F2 = 16.8583, g2 = 0.0804
M = 0.95, q ∞ = 4282.0 psf

American Institute of Aeronautics and Astronautics
Page 17 of 21
Table 1. Comparison of Folding Wing Flutter Solutions: skewed-CartEuler vs. ZTRAN
* ZTRAN: Transonic Field-Panel method using steady CFL3D Euler solution as the
background flow + CartEuler = Skewed-CartEuler
Note that the status of the skewered-CartEuler code is a first generation nonlinear aerodynamic method for the NANSI development in that:
− Skewed-CartEuler seems to be a suitable tool for small Γ morphing. But for large Γ cases, using the skewed-grid might result in unacceptable discrepancy.
− For eventual morphing aerodynamic applications, the GBCC with Euler Solvers at present remains to be the assigned tool for NANSI. GBCC 3D is being fully developed in ZONA.
V. Nonlinear Aeroelastic ROM
ROM-ROM Procedure for NANSI For rapid computational aeroelastic analysis, we have developed a ROM-ROM procedure
which couples the ROM for nonlinear CFD aerodynamics with for nonlinear structure ROM (i.e., ELSTEP) in order to expedite the aeroelastic computation for the computation for system response solutions. The CFD ROM developed at ZONA is a reduced order modeling (ROM) for the nonlinear aerodynamics based on the CFD solver, CartEuler, which is capable of generating continuously morph CFD solution in time domain. Here, our objective in aerodynamic ROM is to find a simplified mathematical model between the response of the aeroelastic system, i.e., the modal coordinates (or generalized coordinates) and the generalized aerodynamic forces. One such technique is the so-called system identification method. The parameters defining the model structure are found through fitting a set of recorded (or measured) input/output data from a given dynamic system; this process is called training. Reduced Order Model of Aerodynamics Based on CartEuler Solutions
We have developed a reduced order modeling (ROM) for the aerodynamics based on the CFD solver, CartEuler. Our objective in ROM is to find a simplified mathematical model between the response of the aeroelastic system, i.e., the modal coordinates (or generalized coordinates) and the generalized aerodynamic forces. One such technique is the so-called system identification. The parameters defining the model structure is found through fitting a set of recorded (or measured) input/output data from the dynamic system; a process which usually is called training. Here, we implement the filtered impulse method (FIM) signals as the training inputs.
Machnumber
Flutter Dynamic Pressure (psf)
Flutter Frequency (Hz)
CartEuler+ ZTRAN* CartEuler+ ZTRAN*
Γ = 0o 0.90 1210.1 1140.0 6.48 6.170.95 966.9 923.3 5.54 5.29
Γ = 10o 0.90 2567.0 2092.0 8.03 7.440.95 3058.5 2525.0 8.24 7.53
Γ = 30o 0.90 3770.0 3890.0 17.71 17.200.95 4009.1 4127.0 17.08 16.83

American Institute of Aeronautics and Astronautics
Page 18 of 21
A FIM signal is given by:
( ) ( ) ( )2
0 00 0
0
sin when 0 when
a t tu t Ae t t t tt t
ω ω π ω ω− −= − ≥
= < (17)
A staggered sequence (one after one) FIM input of modal coordinates is employed for training. Each mode uses its own natural frequency as the ω in Equation (17). The reason behind this choice is that it is believed, each mode would be excited around its own natural frequency.
Two types of discrete time modeling structures are used to represent the ROM between generalized coordinates and normalized GAFs. The first one is the auto-regressive moving average (ARMA) model. By denoting y as the output, and u as the input vector, we have
( ) ( ) ( )1 1
1a bn n
i ji j
y t a y t i t j= =
= − + − +∑ ∑b u (18)
where an and bn represent the order of the model.
The second is the feed-forward neural network (NNet). A two layer neural network is shown in Figure 23, which consists of an input layer and an output layer, to represent the forward dynamics of the plant. The input layer shown in Figure 23 includes vector U consisting of current and previous input signals, and, vector py consisting an previous plant outputs, and S neurons. The size of vector U would be
Figure 23. Two-layer Feed-Forward Neural
Network
the product of number of components (or channels) of input signal and the delay order bn . The modeled plant output at time t by the neural network would be given in a concise
notation as: ( ) ( ) ( ) ( ) ( ) ( )( ) ( )2 2,1 1,1 1,2 1 2tanh py t a W W U W y b b= = ⋅ ⋅ + ⋅ + + (19)
When the neural network is given appropriate weights and biases, it provides the desired outputs. The process to get the proper set of the weight matrixes and the biases is called the training or learning of the network.
It can be seen that the ARMA model can be represented by one neuron model with linear transfer function. We always start with the ARMA model to determine the proper delay order an and bn .
Using the training data, an optimization procedure is implemented to search for the best parameters ia , ib in Equation (18) and ( ) ( )1,1 1, W b , ( )2,1W and ( )2b by minimizing the mean square of the error between model output and targeted output (mse) or the generalized mean square error (msereg).
LCO Solutions for the Folding Wing with ROM-ROM
NANSI solves the nonlinear structural equations in terms of the modal coordinates as follows:
( ) ( ) ( ) ( )1 2 3ij j ij j ij j ijl j l ijlp j l p iM q D q K q K q q K q q q F t+ + + + = (20)
Σ
Σ
Σ
Σ
ƒ
ƒ
ƒ
ƒ
......
......
U
yp
n1(1)
n2(1)
nS(1)
a1(1)
a2(1)
aS(1)
n(2) a(2)
Inputs Input Layer Output Layer
wij(1,1)
wi(2,1)
...
wij(1,2)
bS(1)
b(2)
b2(1)
b1(1)

American Institute of Aeronautics and Astronautics
Page 19 of 21
where , , and ij ij j iM D q F are generalized mass, damping, coordinates and aerodynamic forces, respectively; ( ) ( ) ( )1 2 3, , and ij ijl ijlpK K K are the linear, quadratic, and cubic nonlinear stiffness matrices. The left hand side of Equation (20) represents the ROM of the nonlinear structure where the linear, quadratic and cubic nonlinear stiffness matrices are obtained by the ELSTEP procedure via nonlinear NASTRAN analyses.
Normally the generalized aerodynamic forces iF are computed by CFD solver, e.g., CartEuler, which could be very time consuming. With the aerodynamic ROM in lieu of the CFD solver, e.g., using the neural network model, Equation (1.20) would become:
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( )1 2 3 2,1 1,1 1,2 1 2tanh ij j ij j ij j ijl j l ijlp j l p i i i i p i iM q D q K q K q q K q q q W W U W F b b+ + + + = ⋅ ⋅ + ⋅ + + (21)
Equation (21) indicates a fully ROM approach both structurally and aerodynamically. Time saving could be tremendous during time integration or marching process with the fully ROM approach.
Aerodynamic ROMs are firstly sought before solving Equation (21). The inputs (prescribed motion of modal coordinates), and the normalized GAF solutions by CartEuler and the trained ROM are shown in Figure 14 for the folding wing at the initial state (as a flat plate). Only the results for the first three normalized GAFs are shown in the figure for simplicity, even though total 6 modes are used as so indicated in the prescribed FIM signals.
Two typical LCO solutions with the fully ROM approach are shown in Figure 25 and Figure 26 along with the solutions with the direct CartEuler providing the aerodynamic forces. In the case of the attitude equal 20kft, LCO amplitudes predicted by the fully ROM approach agree very well with the direct CFD approach, but
Figure 14. Training of aerodynamic ROM
using CartEuler solutions (Mach=0.95)
phase shifting occurs as the LCO develops. As for 30kft altitude case, the direct CFD approach has not reached the LCO level even after days’ running, but with fully ROMs, we are able to recover the LCOs within minutes.

American Institute of Aeronautics and Astronautics
Page 20 of 21
Figure 25. NANSI analyses for the folding wing at M=0.95, H=20kft
Figure 26. NANSI analyses for the folding wing at M=0.95, H=30kft
References
1. Wilson, J.R., “Morphing UAVs Change the Shape of Warfare,” Aerospace America, February 2004, pp. 28-29.
2. Wall, R., “Taking Shape,” Aviation Week & Space Technology, January 5, 2004, pp. 54 and 56. 3. Lee, D.H., and Weisshaar, T.A., “Aeroelastic Studies on a Folding-Wing Configuration,” AIAA
Paper 2005-1996, April 2005. 4. Sanders, B., Eastep, F.E., and Forster, E., “Aerodynamic and Aeroelastic Characteristics of Wings
with Conformal Control Surfaces for Morphing Aircraft,” Journal of Aircraft, Vol. 40, No. 1, Jan-Feb 2003, pp 94-99.

American Institute of Aeronautics and Astronautics
Page 21 of 21
5. ZONA Technology, Inc., “Practical LPV Modeling and Control Framework for Aeroelastic Morphing UAV,” Final Report of Phase I AF/SBIR, Contract No. F8650-05-M-3538, January 2006.
6. Schuster, D.M., Liu, D.D., and Huttsell, L.J., “Computational Aeroelasticity: Success, Progress, Challenge,” J. Aircraft, Vol. 40 (2003), pp. 843.
7. Craig, R.R. Jr., and Bampton, M.C.C., “Coupling of Substructures for Dynamic Analysis,” AIAA Journal, v. 6, 1313-1319 (1968).
8. Dowell, E., “Theoretical Experimental Aeroelastic Study for Folding Wing Structures,” Journal of Aircraft, Vol. 45, No. 4, pp. 1136, July-August 2008.
9. Radu, A., Yang, B., Kim, K., and Mignolet, M.P., “Prediction of the Dynamic Response and Fatigue Life of Panels Subjected to Thermo-Acoustic Loading,” Proceedings of the 45th Structures, Structural Dynamics, and Materials Conference, Palm Springs, California, Apr. 19-22, 2004. Paper AIAA-2004-1557.
10. Mignolet, M.P., Radu, A.G., and Gao, X., “Validation of Reduced Order Modeling for the Prediction of the Response and Fatigue Life of Panels Subjected to Thermo-Acoustic Effects,” Proceedings of the 8th International Conference on Recent Advances in Structural Dynamics, Southampton, United Kingdom, Jul. 14-16, 2003.
11. ELSTEP/FAT v.2.7 Manual, ZONA Technology, 2006. 12. Isogai, K., “On the Transonic-Dip Mechanism of Flutter of a Sweptback Wing,” AIAA J., Vol. 17
(1979), pp. 793. 13. Isogai, K., “On the Transonic-Dip Mechanism of Flutter of a Sweptback Wing: Part II,” AIAA J.,
Vol.19 (1981), pp. 1240. 14. Tijdeman, H. "Investigations of the Transonic Flow Around Oscillating Airfoils" NLR TR 77090U,
National Aerospace Laboratory (NLR) The Netherlands, 1977, pp 65. 15. Ballhaus,W.F. and Goorjian, P.M., "Implicit Finite Difference Computation of Unsteady Transonic
Flows About Airfoils" AIAA Journal Vol 15, no 12, December 1977, pp1728-1735