Contentsward/teaching/m605/every2_new.pdfChapter 1 Nonlinear Oscillators 1.1 Introductory Theory We...
30
Contents 1 Nonlinear Oscillators 5 1.1 Introductory Theory ......................... 5 1.1.1 Method of Eliminating Secular Terms ........... 5 1.1.2 Alternate Method ...................... 6 1.2 Constant-Amplitude Oscillations .................. 9 1.2.1 Example ............................ 10 1.3 Limit Cycle .............................. 13 1.3.1 Example ............................ 13 1.4 Forcing ................................ 15 1.4.1 Example ............................ 16 1.5 Entrainment .............................. 21 2 Hysteresis 28 2.1 Introduction .............................. 28 2.2 Delay in Bifurcation ......................... 28 2.2.1 Simple Example ....................... 32 2.2.2 Insect Infestation ....................... 32 2.3 Time Delay in Second-Order Equation ............... 40 2.3.1 Approximation for κ of order 1 ............... 42 2.3.2 Approximation for κ = 0 and x 1 small ........... 45 2.3.3 Approximation for κ order ǫ ................. 48 3 Basic Floquet Theory 49 3.1 General Results ............................ 49 3.1.1 Example ............................ 55 3.1.2 Periodic Solution ....................... 56 3.2 General Results for n =2 ...................... 57 3.2.1 Stability of Periodic Solution ................ 57 3.2.2 Example ............................ 58 3.2.3 Stability of Second-Order ODE ............... 59 3.2.4 Application to Hill’s Equation ................ 63 3.3 Stability Boundary of Mathieu’s Equation ............. 65 3.3.1 Undamped Case ....................... 65 3.3.2 Undamped Case with ǫ small ................ 69 2
Transcript of Contentsward/teaching/m605/every2_new.pdfChapter 1 Nonlinear Oscillators 1.1 Introductory Theory We...

Contents
1 Nonlinear Oscillators 5
1.1 Introductory Theory . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Method of Eliminating Secular Terms . . . . . . . . . . . 5
1.1.2 Alternate Method . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Constant-Amplitude Oscillations . . . . . . . . . . . . . . . . . . 9
1.2.1 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Limit Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.1 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4 Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4.1 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Entrainment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Hysteresis 28
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Delay in Bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Simple Example . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.2 Insect Infestation . . . . . . . . . . . . . . . . . . . . . . . 32
2.3 Time Delay in Second-Order Equation . . . . . . . . . . . . . . . 40
2.3.1 Approximation for κ of order 1 . . . . . . . . . . . . . . . 42
2.3.2 Approximation for κ = 0 and x1 small . . . . . . . . . . . 45
2.3.3 Approximation for κ order ǫ . . . . . . . . . . . . . . . . . 48
3 Basic Floquet Theory 49
3.1 General Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.1.1 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.1.2 Periodic Solution . . . . . . . . . . . . . . . . . . . . . . . 56
3.2 General Results for n = 2 . . . . . . . . . . . . . . . . . . . . . . 57
3.2.1 Stability of Periodic Solution . . . . . . . . . . . . . . . . 57
3.2.2 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.2.3 Stability of Second-Order ODE . . . . . . . . . . . . . . . 59
3.2.4 Application to Hill’s Equation . . . . . . . . . . . . . . . . 63
3.3 Stability Boundary of Mathieu’s Equation . . . . . . . . . . . . . 65
3.3.1 Undamped Case . . . . . . . . . . . . . . . . . . . . . . . 65
3.3.2 Undamped Case with ǫ small . . . . . . . . . . . . . . . . 69
2

3.3.3 Damped Case . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.3.4 Damped Case with ǫ small . . . . . . . . . . . . . . . . . 76
3.3.5 Hill’s Equation . . . . . . . . . . . . . . . . . . . . . . . . 80
3.4 Applications of Mathieu’s Equation . . . . . . . . . . . . . . . . . 83
3.4.1 Pendulum with Oscillating Pivot . . . . . . . . . . . . . . 83
3.4.2 Variable Length Pendulum . . . . . . . . . . . . . . . . . 83
3.4.3 Ion Traps . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4 Floquet Theory Perturbed by Small Nonlinear Terms 89
4.1 Introduction to Multiple Time Scales . . . . . . . . . . . . . . . . 89
4.2 Nonlinear Mathieu Equation . . . . . . . . . . . . . . . . . . . . 91
4.2.1 Derivation of Model . . . . . . . . . . . . . . . . . . . . . 91
4.2.2 Analysis Without Multiple Time Scales . . . . . . . . . . 92
4.2.3 Analysis With Multiple Time Scales . . . . . . . . . . . . 93
4.2.4 Analysis with Multiple Time Scales, in Polar Coordinates 100
4.3 Nonlinear Damped Mathieu Equation . . . . . . . . . . . . . . . 101
4.3.1 Derivation of Model . . . . . . . . . . . . . . . . . . . . . 101
4.3.2 Analysis With Multiple Time Scales . . . . . . . . . . . . 102
4.3.3 Another Application: the Inverted Pendulum with Damping106
5 Delay Differential Equations 107
5.1 Preliminary Examples . . . . . . . . . . . . . . . . . . . . . . . . 107
5.1.1 Numerical Solutions . . . . . . . . . . . . . . . . . . . . . 107
5.1.2 Region of Stability of a Simple Example . . . . . . . . . . 107
5.2 Machine Tool Vibrations . . . . . . . . . . . . . . . . . . . . . . . 117
5.3 Car Following Model . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.4 Band-Limited Feedback . . . . . . . . . . . . . . . . . . . . . . . 124
5.5 Lindstedt’s Method . . . . . . . . . . . . . . . . . . . . . . . . . . 127
6 Centre Manifold Reduction 131
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.2 Hopf Bifurcation of Ordinary Differential Equations . . . . . . . 134
6.2.1 Change of Variables . . . . . . . . . . . . . . . . . . . . . 134
6.2.2 Centre Manifold . . . . . . . . . . . . . . . . . . . . . . . 137
6.2.3 Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . 138
6.3 Delay Differential Equations . . . . . . . . . . . . . . . . . . . . . 141
7 Differential Equation Models I 148
7.1 Thermoelastic Contact . . . . . . . . . . . . . . . . . . . . . . . . 148
7.1.1 Variable Dirichlet Condition . . . . . . . . . . . . . . . . . 148
7.1.2 Barber Condition . . . . . . . . . . . . . . . . . . . . . . . 152
7.2 Thermostat Problem . . . . . . . . . . . . . . . . . . . . . . . . . 155
7.3 Counter-Example . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.3.1 Sines and Cosines . . . . . . . . . . . . . . . . . . . . . . 160
7.3.2 Whittaker Functions . . . . . . . . . . . . . . . . . . . . . 161
7.3.3 Airy Functions . . . . . . . . . . . . . . . . . . . . . . . . 165
3

7.3.4 Bessel Functions . . . . . . . . . . . . . . . . . . . . . . . 165
7.3.5 Bessel Functions II . . . . . . . . . . . . . . . . . . . . . . 167
7.3.6 Legendre Polynomials . . . . . . . . . . . . . . . . . . . . 169
8 Spectral Theory 172
8.1 Choice of Inner Product . . . . . . . . . . . . . . . . . . . . . . . 172
8.1.1 Simple Example . . . . . . . . . . . . . . . . . . . . . . . 172
8.1.2 Eigenvalue in Boundary Condition . . . . . . . . . . . . . 173
8.1.3 Delay Differential Equation . . . . . . . . . . . . . . . . . 174
8.2 Expanding a Function in Terms of the Eigenfunctions . . . . . . 176
8.2.1 L Self-Adjoint . . . . . . . . . . . . . . . . . . . . . . . . 176
8.2.2 L Not Self-Adjoint . . . . . . . . . . . . . . . . . . . . . . 176
8.2.3 Simple Example . . . . . . . . . . . . . . . . . . . . . . . 176
8.2.4 Eigenvalue in Boundary Condition . . . . . . . . . . . . . 178
8.3 Green’s Function . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
8.3.1 Simple Example . . . . . . . . . . . . . . . . . . . . . . . 181
8.3.2 Eigenvalue in Boundary Condition . . . . . . . . . . . . . 185
A Trigonometric Identities 192
B Derivation of m1, m2, m3 193
C Extra Derivations Relating to Green’s Function 198
C.1 Derivation of Continuity Condition of Green’s Function at x = ξ 198
C.2 Derivation of g1, g2, g3, g4 . . . . . . . . . . . . . . . . . . . . . . 199
C.2.1 Derivation of g1, g2 . . . . . . . . . . . . . . . . . . . . . . 199
C.2.2 Derivation of g3, g4 . . . . . . . . . . . . . . . . . . . . . . 201
D Perturbation Theory 203
D.1 Simple Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
D.2 Wilkinson’s Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . 204
D.2.1 Eigenvalues . . . . . . . . . . . . . . . . . . . . . . . . . . 207
D.2.2 Sherman-Woodbury-Morrison Formula . . . . . . . . . . . 214
D.2.3 Pseudospectrum . . . . . . . . . . . . . . . . . . . . . . . 215
D.3 Domain Perturbations . . . . . . . . . . . . . . . . . . . . . . . . 217
D.3.1 General Method . . . . . . . . . . . . . . . . . . . . . . . 217
D.3.2 Method of Assumed Solution . . . . . . . . . . . . . . . . 221
D.3.3 Result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
4

Chapter 1
Nonlinear Oscillators
1.1 Introductory Theory
We consider a couple different situations where we add a nonlinearity of orderǫ to a simple oscillator. These problems are of the form
x′′ + x+ ǫh(x, x′) = 0. (1.1)
In subsequent sections, we will consider specific examples.
1.1.1 Method of Eliminating Secular Terms
We start by letting x = x(T, τ) where T = t and τ = ǫt. Our problem becomes
xTT + 2ǫxTτ + ǫ2xττ + x+ ǫh(x, x′) = 0. (1.2)
We then letx = x0 + ǫx1 + . . . (1.3)
so that equation 1.2 becomes to order 1
x0TT + x0 = 0 (1.4)
so that
x0 = A(τ) cos (θ) = A(τ) cos(T + τφ(τ)) = A(τ) cos((1 + ǫφ)t) (1.5)
so that
x0T = −A (τ) sin (T + τφ (τ)) (1.6)
x0Tτ = −A′ sin (T + τφ) −A (φ+ τφ′) cos (T + τφ) . (1.7)
Equating terms in equation 1.2 of order ǫ, we obtain that
x1TT + x1 = −2x0Tτ − h(x0, x0T ) (1.8)
5

since
h(x, x′) = h (x0 + ǫx1, x0T + ǫ (x1T + x0τ )) (1.9)
≃ h (x0, x0T ) + ha (a, b)|(x0,x0T ) ǫx1
+ hb (a, b)|(x0,x0T ) ǫ (x1T + x0τ ) (1.10)
≃ h (x0, x0T ) +O (ǫ) (1.11)
Equation 1.8 becomes
x1TT + x1 = −2 (−A′ sin (θ) −A (φ+ τφ′) cos (θ))
− h (A cos (θ) ,−A sin (θ)) . (1.12)
Now we wish to eliminate the secular terms.We can write∑
n
an sin (nθ) + bn cos (nθ) = −2 (−A′ sin (θ) −A (φ+ τφ′) cos (θ))
− h (A cos (θ) ,−A sin (θ)) , (1.13)
where, in order to eliminate the secular terms, we must have a1 = b1 = 0. Wehave, as before, that
a1 =1
π
∫ 2π
0
[−2 (−A′ sin (θ) −A (φ+ τφ′) cos (θ))
− h (A cos (θ) ,−A sin (θ))] sin (θ) dθ (1.14)
b1 =1
π
∫ 2π
0
[−2 (−A′ sin (θ) −A (φ+ τφ′) cos (θ))
− h (A cos (θ) ,−A sin (θ))] cos (θ) dθ. (1.15)
Upon requiring that a1 = b1 = 0, we then obtain that
A′ =1
2π
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) sin (θ) dθ (1.16)
φ+ τφ′ =1
2πA
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) cos (θ) dθ (1.17)
1.1.2 Alternate Method
Our problem is once again
x′′ + x+ ǫh(x, x′) = 0 (1.18)
Let Θ(ǫ) be the period of the solution. Then we can make the change of variables
t =Θ(ǫ)
2πθ (1.19)
6

so that the period is 2π in terms of the new time θ. We then obtain
(
2π
Θ
)2
x+ x+ ǫh
(
x,
(
2π
Θ
)
x; ǫ
)
= 0 (1.20)
x+ x+ ǫh
(
x,
(
2π
Θ
)
x; ǫ
)
=
(
1 −(
2π
Θ
)2)
x. (1.21)
We now expand 2πΘ = 1 + ǫφ, so that we obtain
x+ x+ ǫh (x, (1 + ǫφ)x; ǫ) = −2ǫφx (1.22)
so that x+ x ∼ 0 and hence
x+ x+ ǫh(x, (1 + ǫφ)x; ǫ) = 2ǫφx (1.23)
x+ x = ǫg(x, x, φ) (1.24)
where we have defined
g(x, x, φ) = 2φx− h(x, (1 + ǫφ)x; ǫ). (1.25)
Now by assumption our solution is 2π-periodic, and so we wish to find such asolution to this equation.
Now the solutions to the homogeneous equation are
y1 = sin(θ), y2 = cos(θ). (1.26)
Using the method of variation of parameters, we write
x = v1y1 + v2y2 (1.27)
x′ = v′1y1 + v′2y2 + v1y′1 + v2y
′2. (1.28)
Now if we specify that
v′1y1 + v′2y2 = 0 (1.29)
we obtain that
x′ = v1y′1 + v2y
′2 (1.30)
x′′ = v′1y′1 + v′2y
′2 + v1y
′′1 + v2y
′′2 (1.31)
so that, from our inhomogeneous equation,
v′1y′1 + v′2y
′2 = ǫg(x). (1.32)
Using the conditions
v′1y1 + v′2y2 = 0. (1.33)
v′1y′1 + v′2y
′2 = ǫg(x), (1.34)
7

together with
y1 = sin(θ), y2 = cos(θ), (1.35)
we obtain that
v1 =
∫ θ
0
ǫg(x) cos(s) ds+A, (1.36)
v2 = −∫ θ
0
ǫg(x) sin(s) ds+B, (1.37)
so that
x = sin(θ)
(
∫ θ
0
ǫg(x) cos(s) ds+ C1
)
+ cos(θ)
(
−∫ θ
0
ǫg(x) sin(s) ds+ C2
)
(1.38)
From the initial conditions, we have that C1 = 0, C2 = −A0, so that
x = sin(θ)
∫ θ
0
ǫg(x) cos(s) ds− cos(θ)
∫ θ
0
ǫg(x) sin(s) ds+A0 cos(θ). (1.39)
Now in order for our solution to be 2π-periodic, we must have x(0) = x(2π) andx(π/2) = x(2π + π/2), so that
0 =
∫ 2π
0
g(s) sin(s) ds = P, (1.40)
0 =
∫ 2π
0
g(s) cos(s) ds = Q. (1.41)
Now we wish to show that for ǫ≪ 1 there is a A, k1 that satisfy this condition.First consider ǫ = 0. Then we have from above
0 =
∫ 2π
0
g(s) sin(s) ds (1.42)
0 =
∫ 2π
0
(2φ0x0 − h(x0, x0; 0)) sin(s) ds (1.43)
0 =
∫ 2π
0
(2φ0A0 cos(s) − h(x0, x0; 0)) sin(s) ds (1.44)
0 =
∫ 2π
0
h(x0, x0; 0) sin(s) ds = P0 (1.45)
8

and
0 =
∫ 2π
0
g(s) cos(s) ds (1.46)
0 =
∫ 2π
0
(2φ0x0 − h(x0, x0; 0)) cos(s) ds (1.47)
0 =
∫ 2π
0
(2φ0A0 cos(s) − h(x0, x0; 0)) cos(s) ds (1.48)
0 = 2πφ0A0 −∫ 2π
0
h(x0, x0; 0) cos(s) ds. = 2πφ0A0 −Q0 (1.49)
We can solve for A0 and phi0 from equations 1.45 and 1.49. We first need to con-firm, though, that for ǫ small the full solution will have A and φ approximatelygiven by A0 and φ0.
As a result, we with to show that for ǫ sufficiently small, there are somefunctions φ = φ(ǫ) and A = A(ǫ) analytic in ǫ and which satisfy φ(0) = φ0,A(0) = A0. The implicit function theorem will guarantee these provided that
limǫ→0
det
∂P∂φ
∂P∂A
∂Q∂φ
∂Q∂A
6= 0, (1.50)
which means that we must have
det
0 ∂P0
∂A0
2πA0 2πφ0 + ∂P0
∂A0
6= 0 (1.51)
−2πA0∂P0
∂A06= 0. (1.52)
As a result, we can approximate the solution for ǫ small by the solution toequations 1.45 and 1.49 provided that A0 6= 0 and ∂P0
∂A0
6= 0.Note that equations 1.45 and 1.49 give the equilibrium values of A and φ as
found from equations 1.16 and 1.17. So the result of this section is the same asthat in the previous section.
1.2 Constant-Amplitude Oscillations
The first case that we consider is when a small nonlinearity is only dependenton x. We can write such a problem as
x′′ + x+ ǫh(x) = 0 (1.53)
Equation 1.16 tells us that
A′ =1
2π
∫ 2π
0
h (A cos (θ)) sin (θ) dθ (1.54)
A′ = 0 (1.55)
9

since h is a function of a cosine, which is orthogonal to sine. As a result theamplitude of oscillations is always constant. Equation 1.17 tells us that atequilibrium
φ =1
2πA
∫ 2π
0
h (A cos (θ)) cos (θ) dθ. (1.56)
Note that in the alternate method in §1.1.2, we can no longer apply theimplicit function theorem since ∂P0
∂A0
= 0. This makes sense since we have equi-librium for any value of A, which is A0 in the notation of §1.1.2. Instead,however, for A given, we can apply the inverse function theorem to equation1.41 provided that
limǫ→0
∂Q
∂φ= 2πA0 6= 0. (1.57)
1.2.1 Example
Consider the example h(x) = x3. Equation 1.12 becomes
x1TT + x1 = 2A′ sin (θ) + 2A (φ+ τφ′) cos (θ) − h (A cos (θ)) (1.58)
Note that for problems where h depends only on x and not on any of its deriva-tives, we can make the assumption that A and φ are time-independent, whichsimplifies the above equation considerably. However for the sake of consistencywith the more complex examples, we will keep those terms.
x1TT + x1 = 2A′ sin (θ) + 2A (φ+ τφ′) cos (θ) −A3 cos3 (θ) (1.59)
= 2A′ sin (θ) + 2A (φ+ τφ′) cos (θ) −A3
(
3 cos θ + cos 3θ
4
)
(1.60)
using an identity from Appendix A. To eliminate secular terms, we must have
A′ = 0 (1.61)
and
0 = 2A (φ+ τφ′) −A3 3
4(1.62)
so that at equilibrium (φ′ = 0),
φ =3
8A2. (1.63)
10

x
x′
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
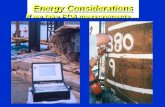
Figure 1.1: The solution to equation 1.53 with h(x) = x3 and ǫ = 0.01, usingvarious initial conditions.
Checking this with the formula given in equation 1.17, we obtain
φ+ τφ′ =1
2πA
∫ 2π
0
h (A cos (θ)) cos (θ) dθ (1.64)
=A2
2π
∫ 2π
0
cos4 (θ) dθ (1.65)
=A2
2π
∫ 2π
0
(
1
8cos (4θ) + cos2 (θ) − 1
8
)
dθ (1.66)
=A2
2π
(
π − π
4
)
(1.67)
=3
8A2. (1.68)
In figure 1.1, we can see that in the x-x′ plane each solution remains a circle ofconstant radius, as expected.
Comparing with Analytical Solution
For this example, it’s actually possible to find the analytical solution. Ourproblem is
x′′ + x+ ǫx3 = 0. (1.69)
11

By multiplying this by x′ and integrating, we obtain that
x′2
2+x2
2+ ǫ
x4
4= C (1.70)
and so we can write our problem as
x′2
2+ V (x) = E, (1.71)
where, by the initial conditions, E = V (A) and where we have defined
V (x) =x2
2+ ǫ
x4
4. (1.72)
Now x′(t) = 0 when
V (x) = V (A) (1.73)
x2
2+ ǫ
x4
4=A2
2+ ǫ
A4
4(1.74)
(x−A) (x+A) = − ǫ
2(x−A) (x−A)
(
x2 +A2)
(1.75)
so that either x = ±A or1 = − ǫ
2
(
x2 +A2)
, (1.76)
the later being impossible since the left-hand side is positive but the right-handside is clearly negative.
As a result, we’re in a potential well with turning points at x = A and x =−A. Define Θ to be the period of the solution. Then by symmetry x(Θ
2 ) = −A.We have that
x′2
2+ V (x) = V (A) (1.77)
x′ = ±√
2 (V (A) − V (x)), (1.78)
where we take the negative sign as we go down from x = A to x = −A, so that
∫ −A
A
1√
V (A) − V (x)dx = −
∫ Θ/2
0
√2 dt (1.79)
2
∫ A
0
1√
V (A) − V (x)dx =
Θ√2
(1.80)
2√
2
∫ A
0
√2(
A2 − x2)−1/2
(
1 +ǫ
2
(
A2 + x2)
)−1/2
dx = Θ. (1.81)
12

Now if we let x = A sin (θ), then this becomes
Θ = 4
∫ π/2
0
(
1 +ǫA2
2
(
1 + sin2 (θ))
)−1/2
dθ (1.82)
Θ ≃ 4
∫ π/2
0
(
1 − ǫA2
4
(
1 + sin2 (θ))
)
dθ (1.83)
Θ ≃ 2π
(
1 − ǫ3A2
8
)
(1.84)
Θ
2π≃ 1 − ǫ
3A2
8(1.85)
2π
Θ≃ 1 + ǫ
3A2
8(1.86)
2π
Θ≃ 1 + ǫφ, (1.87)
which agrees with our previous result.
1.3 Limit Cycle
Here, we consider problems of the form
x′′ + x+ ǫh(x, x′) = 0 (1.88)
with h(0, 0) = 0. This is exactly the problem considered in the introduction(§1.1). We now consider an example.
1.3.1 Example
Leth(x, x′) = (x2 − 1)x′. (1.89)
Then equations 1.16 and 1.17 tell us that we must have
A′ =1
2π
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) sin (θ) dθ, (1.90)
φ+ τφ′ =1
2πA
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) cos (θ) dθ. (1.91)
As a result, we must have
A′ =1
2π
∫ 2π
0
(
−A3 cos2 (θ) sin (θ) +A sin (θ))
sin (θ) dθ (1.92)
=1
2π
∫ 2π
0
−A3
(
1 + cos (2θ)
2
)(
1 − cos (2θ)
2
)
+A sin2 (θ) dθ (1.93)
= −A3
8+A
2(1.94)
13

x
x′
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
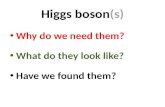
Figure 1.2: The solution to equation 1.88 with h(x, x′) given by equation 1.89and ǫ = 0.01, using various initial conditions.
and
φ+ τφ′ =1
2πA
∫ 2π
0
(
−A3 cos2 (θ) sin (θ) +A sin (θ))
cos (θ) dθ (1.95)
=1
2πA
∫ 2π
0
−A3
(
3 cos (θ) + cos (3θ)
4
)
sin (θ) +A sin (θ) cos (θ)
= 0, (1.96)
by using the identities in Appendix A. As a result,
φ =C
τ(1.97)
where C is some constant, and so
θ = T + C. (1.98)
By setting A′ = 0, we see that we get a steady state for A = 2 and thisis stable. This is shown in figure 1.2, where all the solutions in the x-x′ planeapproach a circle of radius 2.
14

1.4 Forcing
Here we consider problems of the form
x′′ + x+ ǫh(x, x′) = ǫ cos (ωt) (1.99)
x′′ + x+ ǫ (h(x, x′) − cos (ωt)) = 0 (1.100)
where ω = 1 + ǫk1, so we’re near resonance.In this case, equation 1.16 becomes
A′ =1
2π
∫ 2π
0
[h (A cos (θ) ,−A sin (θ)) − cos (ωt)] sin (θ) dθ (1.101)
where
cos (ωt) = cos (t+ k1ǫt) (1.102)
= cos (t+ φτ + k1τ − φτ) (1.103)
= cos (θ + k1τ − φτ) (1.104)
= cos (θ) cos (k1τ − φτ) − sin (θ) sin (k1τ − φτ) (1.105)
= cos (θ) cos (ψ) + sin (θ) sin (ψ) (1.106)
where we have defined ψ = φτ − k1τ , so that we obtain
A′ =1
2π
∫ 2π
0
(− cos (θ) cos (ψ) − sin (θ) sin (ψ)) sin (θ) dθ
+1
2π
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) sin (θ) dθ (1.107)
= −1
2sin (ψ) +
1
2π
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) sin (θ) dθ. (1.108)
Likewise, equation 1.17 becomes
φ+ τφ′ =1
2πA
∫ 2π
0
[h (A cos (θ) ,−A sin (θ)) − cos (ωt)] cos (θ) dθ (1.109)
φ+ τφ′ =1
2πA
∫ 2π
0
(− cos (θ) cos (ψ) − sin (θ) sin (ψ)) cos (θ) dθ
+1
2πA
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) cos (θ) dθ (1.110)
φ+ τφ′ = − 1
2Acos (ψ) +
1
2πA
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) cos (θ) dθ (1.111)
ψ′ + k1 = − 1
2Acos (ψ) +
1
2πA
∫ 2π
0
h (A cos (θ) ,−A sin (θ)) cos (θ) dθ (1.112)
We can then solve this for the equilibrium values of A and ψ and then determinethe stability of this equilibrium.
15

1.4.1 Example
Leth(x, x′) = λx′ + κx3. (1.113)
Following the above analysis, we obtain that
2A′ = − sin (ψ) − λA (1.114)
2Aψ′ = − cos (ψ) +3
4κA3 − 2Ak1. (1.115)
Let (Ae, ψe) be an equilibrium solution to this. Then
0 = − sin (ψe) − λAe (1.116)
0 = − cos (ψe) +3
4κA3
e − 2Aek1, (1.117)
which can be rewritten as
λAe = − sin (ψe) (1.118)
2Aek1 −3
4κA3
e = − cos (ψe) , (1.119)
so that
λ2A2e +
(
2Aek1 −3
4κA3
e
)2
= 1 (1.120)
3
8κA2
e ±1
2
√
1
A2e
− λ2 = k1. (1.121)
As a result, for every 0 < Ae < 1/λ, there are two values of k1. Now we wishto determine the shape of the bifurcation diagram in the A-k1 plane. First welook for bifurcation points in the A-k1 plane. They will occur when
dk1
dAe= 0. (1.122)
Differentiating the above equation, we obtain
dk1
dAe=
3
4κAe ±
1
4
1√
1A2
e− λ2
−2
A2e
(1.123)
0 = 3κA4e ±
−2√
1A2
e− λ2
(1.124)
0 =4
9κ2A8eλ
2− 1
A2eλ
2+ 1 (1.125)
0 = bξ4 − ξ + 1 (1.126)
16

0 2 4 6 8 10−5
0
5
ξb = 0.05b
c
b = bc
b = 20bc
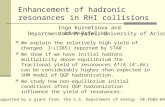
Figure 1.3: A plot of h(ξ) for λ = 1 and for different values of b.
where we have defined
ξ =1
A2eλ
2, b =
4λ6
9κ2. (1.127)
This is denoted h(ξ) and is plotted for different values of b in figure 1.3. Nowthe number of zeros that
h(ξ) = bξ4 − ξ + 1 (1.128)
has changes when h(ξ) = 0 and h′(ξ) = 0 simultaneously. This occurs onlywhen
ξ = ξc =4
3, b = bc =
33
44, (1.129)
which is when
±k = kc(λ) =
(
4
3
)5/2
λ3. (1.130)
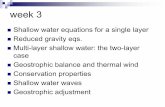
As a result, h(ξ) will have no solution for |k| < kc, but will have two solutions for|k| > kc. Note that for h(ξ) to be zero, we must have ξ > 1 and so every zero isin the range ξ > 1 so that Ae < 1/λ. As a result, our bifurcation diagram in theA-k1 plane will have no bifurcations for |k| < kc, but will have two bifurcationsfor |k| > kc. This is shown in figure 1.4.
We would like to be able to compare this expected amplitude of oscillationwith that of a simulation by letting
k1 = 3 + 5 sin (δt) (1.131)
17

−10 −5 0 5 100
0.2
0.4
0.6
0.8
1
k1
Ae
b = 0.05bc
b = bc
b = 20bc
Figure 1.4: The location of the equilibrium solutions in the k1-A plane for λ = 1and various values of κ, here listed in terms of their corresponding b values.
for δ ≪ ǫ. Unfortunately, this produces figure 1.5, where the solution differswildly from the stable states. If we discretize the time-dependence of k1 byletting
k1 =⌊10 (3 + 5 sin (δt))⌋
10, (1.132)
we obtain figure 1.6, where the solution agrees very well with the stable states.We can see where the problem arises by looking at figure 1.7, a zoomed-in versionof figure 1.6. Every time k1 changes even very slightly, this causes the solutionto oscillate wildly for a brief amount of time. As a result, the continuouslychanging k1 used in figure 1.5 causes large deviations in the solution.
Stability
We have that
A′ = −λ2A− 1
2sin (ψ) = f (A,ψ) (1.133)
ψ′ = −k1 +3κA2
8− 1
2Acos (ψ) = g (A,ψ) . (1.134)
The stability is then determined from the signs of the eigenvalues of
M =
[
fA fψgA gψ
]
=
[ −λ2 − 1
2 cos (ψ)3κA4 + cos(ψ)
2A2
sin(ψ)2A
]
. (1.135)
18

t
x
0 2 4 6 8
x 104
−1
−0.5
0
0.5
1
solutionsteady states
Figure 1.5: A simulation of equation 1.99 with λ = 1, κ = 26√
535/2
, ǫ = 0.1,δ = 0.0001, k1 = 3 + 5 sin (δt).
t
x
0 2 4 6 8
x 104
−1
−0.5
0
0.5
1
solutionsteady states
Figure 1.6: A simulation of equation 1.99 with λ = 1, κ = 26√
535/2
, ǫ = 0.1,
δ = 0.0001, k1 = ⌊10(3+5 sin(δt))⌋10 .
19

t
x
2.6 2.7 2.8 2.9 3
x 104
−0.2
−0.1
0
0.1
0.2
0.3
solutionsteady states
Figure 1.7: A zoomed-in version of figure 1.6, which has λ = 1, κ = 26√
535/2
,
ǫ = 0.1, δ = 0.0001, k1 = ⌊10(3+5 sin(δt))⌋10 .
We determine the signs of the eigenvalues by finding the sign of the trace anddeterminant.
tr(M) = −λ2
+sin (ψ)
2A(1.136)
Now we know that at the equilibrium points,
λA = − sin (ψ) (1.137)
2Ak1 −3
4κA3 = − cos (ψ) (1.138)
and so
tr(M) = −λ2
+−λA2A
= −λ < 0. (1.139)
Now consider the determinant.
det(M) =
(
−λ2
)(
sin (ψ)
2A
)
−(
3κA
4+
cos (ψ)
2A2
)(
−1
2cos (ψ)
)
(1.140)
=λ2
4+
3κA
8cos (ψ) +
cos2 (ψ)
4A2(1.141)
=λ2
4+
3κA
8cos (ψ) +
1
4A2− λ2
4(1.142)
=3
8κA2
(
−2k1 +3
4κA2 +
2
3κA4
)
(1.143)
20

−10 −5 0 5 100
0.2
0.4
0.6
0.8
1
k1
Ae
StableUnstable
Figure 1.8: The bifurcation diagram for equation 1.99 with h given by equation
1.113. This is shown for λ = 1, κ = 23λ3
√b
where b = 0.05bc.
This will be positive (and so the solution will be stable) if and only if
−2k1 +3
4κA2 +
2
3κA4> 0 (1.144)
(
2k1 −3
4κA2
)
3κ
2A4 < 1. (1.145)
Note that we get equality at the bifurcation points. This can be seen by perform-ing implicit differentiation on equation 1.120 and setting dk1
dAe= 0. As a result,
the stability of the equilibrium solution only changes sign at the bifurcationpoints. Note that for k1 near zero, we obtain approximately
−9
8κ2A6 < 0 < 1 (1.146)
so the equilibrium is stable. As a result, we must obtain bifurcation diagramsas shown in figure 1.8.
1.5 Entrainment
We now consider the forced van der Pol oscillator:
x′′ + x− ǫ(
1 − x2)
x′ = ǫF cos (ωt) (1.147)
where we assume that ω is close to, but not exactly at, the resonant frequencyof the problem. We write
ω = 1 + ǫk1. (1.148)
21

0 50 100 150 200 250 300 350 400−3
−2
−1
0
1
2
3
t
x
Figure 1.9: The solution to equation 1.147 with ǫ = 0.1, k1 = 0.4, F = 1.2 andwith initial conditions x(0) = 2, x′(0) = 0.
This problem exhibits entrainment, where the unforced oscillations are quenchedby the forcing function. For example, consider the simulations shown in figures1.9 and 1.10. In figure 1.9, the solution travels in an out of phase with respect tothe forcing function. In comparison, in figure 1.10, where the value of F has onlybeen slightly increased, the solution has been entrained by the forcing function,so the solution goes toward a stable limit cycle with constant amplitude andphase.
We now wish to determine the region in the parameter-space where entrain-ment can occur. We will do this by looking for stable solutions of constantamplitude and phase. Performing the same analysis as before, we obtain
A′ =A
8
(
4 −A2)
− F
2sin (φτ − k1τ) (1.149)
φ+ τφ′ =−F2A
cos (φτ − k1τ) . (1.150)
Now we let ψ = φτ − k1τ to obtain
A′ =A
8
(
4 −A2)
− F
2sin (ψ) (1.151)
−ψ′ = k1 +F
2Acos (ψ) . (1.152)
At an equilibrium solution, we must then have
Ae8
(
4 −A2e
)
= −F2
sin (ψe) (1.153)
−k1Ae =F
2cos (ψe) , (1.154)
22

0 50 100 150 200 250 300 350 400−3
−2
−1
0
1
2
3
t
x
Figure 1.10: The solution to equation 1.147 with ǫ = 0.1, k1 = 0.4, F = 1.5 andwith initial conditions x(0) = 2, x′(0) = 0.
so that
F 2 = A2e
(
1 − A2e
4
)2
+ 4k21A
2e (1.155)
and so we define
g (Ae) =u3
16− u2
2+(
4k21 + 1
)
u− F 2 = 0 (1.156)
where we have defined u = A2e.
Now we look at the stability of the equilibrium solution. If it is stable, wehave entrainment; if it is not, we do not. Let A = Ae + A∆ and ψ = ψe + ψ∆.Then from equation 1.151, linearising in A∆ and ψ∆, we obtain
A′∆ =
Ae +A∆
2− (Ae +A∆)
3
8− F
2sin (ψe + ψ∆) (1.157)
=Ae2
+A∆
2− A3
e
8− 3A2
eA∆
8
− F
2(sin (ψe) cos (ψ∆) + cos (ψe) sin (ψ∆)) (1.158)
=Ae2
+A∆
2− A3
e
8− 3A2
eA∆
8− F
2sin (ψe) −
F
2cos (ψe)ψ∆ (1.159)
=A∆
2− 3A2
eA∆
8− F
2cos (ψe)ψ∆ (1.160)
=A∆
2− 3A2
3A∆
8+ k1Aeψ∆. (1.161)
23

Likewise from equation 1.152 we obtain
−ψ′∆ = k1 +
F
2 (Ae +A∆)cos (ψe + ψ∆) (1.162)
= k1 +F
2
(
1
Ae− A∆
A2e
)
(cos (ψe) cos (ψ∆) − sin (ψe) sin (ψ∆)) (1.163)
= k1 +F
2
(
1
Ae− A∆
A2e
)
(cos (ψe) − sin (ψe)ψ∆) (1.164)
= − F
2A2e
cos (ψe)A∆ − F
2Aesin (ψe)ψ∆ (1.165)
=k1AeA2e
A∆ +1
Ae
(
−Ae2
+A3e
8
)
ψ∆ (1.166)
=k1
AeA∆ +
(
−1
2+A2e
8
)
ψ∆ (1.167)
We can put these together and write[
A′∆
ψ′∆
]
=
[ 12 − 3
8A2e k1Ae
− k1Ae
12 − 1
8A2e
] [
A∆
ψ∆
]
. (1.168)
As a result, the stability of the equilibrium solution is determined by the signsof the eigenvalues of the matrix
M =
[ 12 − 3
8A2e −k1Ae
k1Ae
12 − 1
8A2e
]
. (1.169)
We will calculate this by considering the sign of its determinant and trace:
tr (M) = 1 − A2e
2, (1.170)
det (M) =
(
1
2− 3
8A2e
)(
1
2− 1
8A2e
)
+ k21. (1.171)
In order for the eigenvalues of M to both be negative, we must have tr (M) < 0and det (M) > 0. For the trace to be negative, we need
u = A2e > 2. (1.172)
By equation 1.155, we get equality when
F 2 =1
2+ 8k2
1. (1.173)
Now in the k1-F plane, tr(M) can also change sign at the turning points ofequation 1.155, which occur when g′(u) = 0. Inserting this condition intog(u) = 0 from equation 1.155, we obtain that the turning points occur at
F 4
16− F 2
27
(
1 + 36k21
)
+16
27k21
(
1 + 4k21
)2= 0 (1.174)
24

k1
F
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
tr = 0Turning Points
Figure 1.11: The lines corresponding to the turning points and to tr(M) = 0.The yellow/ green lines are lines of constant u indicating the region in whichtr(M) < 0.
in the k1-F plane. The lines in the k1-F plane corresponding to the turningpoints and to tr(M) = 0 are shown in figure 1.11, together with the region inwhich tr(M) < 0.
Now the determinant of M is zero when
0 =
(
1
2− 3
8A2e
)(
1
2− 1
8A2e
)
+ k21. (1.175)
Solving this for u, plugging the result into equation 1.155 and multiplying thetwo answers together, we obtain that
F 4
16− F 2
27
(
1 + 36k21
)
+16
27k21
(
1 + 4k21
)2= 0, (1.176)
which can be solved for F in terms of k1. Note that this is the same as theequation for the turning points. These are shown in figure 1.12, together withthe region in which det(M) > 0.
Putting this information together, we then obtain that the region of entrain-ment is the region as shown in figure 1.13. The lines tr(M) = 0 and det(M) = 0which form the border for this region intersect at some point P. Since at thispoint, det(M) = 0, we must have
F 4
16− F 2
27
(
1 + 36k21
)
+16
27k21
(
1 + 4k21
)2= 0. (1.177)
Since we also have tr(M) = 0, we must have
F 2 =1
2+ 8k2
1. (1.178)
25

k1
F
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
det = 0
Figure 1.12: The lines corresponding to det(M) = 0. The yellow/ green linesare lines of constant u indicating the region in which det(M) > 0.
k1
F
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
det = 0tr = 0
Figure 1.13: The region of entrainment for equation 1.147. The point of inter-section between the two lines is referred to in the text as the point P. The twoother points are the parameter values used in figures 1.9 and 1.10.
26

0.2 0.22 0.24 0.26 0.28 0.30.9
0.95
1
1.05
1.1
k1
F
P
Q
det = 0tr = 0
Figure 1.14: A zoomed-in version of figure 1.11, showing the intersections be-tween the lines tr(M) = 0 and det(M) = 0.
Putting these two equations together, and letting ξ = k21, we obtain
(
12 + 8ξ
)
16−(
12 + 8ξ
)
(1 + 36ξ)
27+
16
27ξ (1 + 4ξ)
2= 0. (1.179)
Solving this for ξ, we obtain that ξ = 5/64, 1/16. These correspond to k1 =√5/8, F = 3/
√8 and k1 = 1/4, F = 1. The intersection point which corre-
sponds to P, the intersection point along the border of the region of entrain-ment, is k1 =
√5/8, F = 3/
√8. We label the other intersection point, k1 = 1/4,
F = 1, as Q. These two intersections are shown in the zoomed-in figure 1.14.
27

Bibliography
[1] E.Kh. Akhmedov. Floquet theory of neutrino oscillations in the earth.Physics of Atomic Nuclei, 64(5):787–801, May 2001.
[2] J.R. Barber, J. Dundurs, and M. Comninou. Stability considerations inthermoelastic contact. ASME J. Appl. Mech., 47:871–874, December 1980.
[3] A. Bose. A geometric approach to singularly perturbed nonlocal reaction-diffusion equations. SIAM J. Math. Anal., 31(2):431–454, 2000.
[4] R.G. Brewer, R.G. DeVoe, and R. Kallenbach. Planar ion microtraps. Phys.
Rev. A, 46(11), December 1992.
[5] R.V. Churchill and J.W. Brown. Fourier Series and Boundary Value Prob-
lems, chapter 9. McGraw-Hill, 3rd edition, 1978.
[6] L.E. El’sgol’ts. Introduction to the Theory of Differential Equations with
Deviating Arguments, chapter 3. Holden-Day, San Francisco, 1966.
[7] M. Embree and L.N. Trefethen. Pseudospectra gateway. Web site: http:
//www.comlab.ox.ac.uk/pseudospectra.
[8] S.L. Fischer. Ions in electromagnetic traps. senior honours thesis at David-son College, 1995.
[9] B. Friedman. Principles and Techniques of Applied Mathematics, chapter 4.Applied Mathematics. John Wiley & Sons, 1956.
[10] I.-D. Hsu and N.D. Kazarinoff. An applicable Hopf bifurcation formula andinstability of small periodic solutions of the Field-Noyes model. J. Math.
Anal. Appl., 55:61–89, 1976.
[11] L. Illing and D.J. Gauthier. Hopf bifurcations in time-delay systems withband-limited feedback. Physica D, 210:180–202, 2005.
[12] D. Iron and M.J. Ward. The stability and dynamics of hot-spot solutions totwo one-dimensional microwave heating models. Anal. Appl., 2(1):21–70,2004.
189

[13] T. Kalmar-Nagy, G. Stepan, and F.C. Moon. Subcritical Hopf bifurcationin the delay equation model for machine tool vibrations. Nonlinear Dynam.,26:121–142, 2001.
[14] G. Kalna and S. McKee. The thermostat problem with a nonlocal nonlinearboundary condition. IMA J. Appl. Math., 69:437–462, 2004.
[15] B.E. King. Quantum State Engineering and Information Processing with
Trapped Ions. PhD thesis, University of Colorado, 1999.
[16] G.J.M. Maree. Slow passage through a pitchfork bifurcation. SIAM J.
Appl. Math., 56(3):889–918, June 1996.
[17] N.W. McLachlan. Theory and Application of Mathieu Functions. OxfordUniversity Press (Clarendon Press), 1947.
[18] G. Orosz and G. Stepan. Subcritical Hopf bifurcations in a car-followingmodel with reaction-time delay. Proc. R. Soc. A, 462:2643–2670, 2006.
[19] G. Orosz, R.E. Wilson, and B. Krauskopf. Global bifurcation investigationof an optimal velocity traffic model with driver reaction time. Phys. Rev.
E, 70(2), August 2004.
[20] J.A. Pelesko. Nonlinear stability considerations in thermoelastic contact.ASME J. Appl. Mech., 66:109–116, March 1999.
[21] J.A. Pelesko. Nonlinear stability, thermoelastic contact, and the Barbercondition. ASME J. Appl. Mech., 68:28–33, January 2001.
[22] H. Qian, October 1999. Lecture Notes.
[23] R. Rand. Nonlinear Vibrations, chapters 5, 6, 14. Lecture Notes.
[24] J.A. Richards. Stability diagram approximation for the lossy Mathieu equa-tion. SIAM J. Appl. Math., 30(2):240–247, March 1976.
[25] W. Rueckner, J. Georgi, D. Goodale, D. Rosenberg, and D. Tavilla. Ro-tating saddle Paul trap. Am. J. Phys., 63(2):186–187, February 1995.
[26] G. Stepan, T. Insperger, and R. Szalai. Delay, parametric excitation, andthe nonlinear dynamics of cutting processes. Internat. J. Bifur. Chaos,15(9):2783–2798, 2005.
[27] R.I. Thompson, T.J. Harmon, and M.G. Ball. The rotating-saddle trap:a mechanical analogy to RF-electric-quadrupole ion trapping? Can. J.
Phys., 80:1433–1448, 2002.
[28] M.J. Ward. Lecture Notes.
[29] E.W. Weisstein. Weber differential equations. From Mathworld — A Wol-fram Web Resource.http://mathworld.wolfram.com/WeberDifferentialEquations.html.
190

[30] W.E. Wiesel and D.J. Pohlen. Canonical Floquet theory. Celestial Me-
chanics and Dynamical Astronomy, 58:81–96, 1994.
[31] J.H. Wilkinson. Algebraic Eigenvalue Problem. Clarendon Press, Oxford,1965.
[32] S.A. Wolf and J.B. Keller. Range of the first two eigenvalues of the Lapla-cian. Proc. R. Soc. Lond., A, 447:397–412, 1994.
[33] C. Zavala (?). Control of Nonlinear Dynamic Systems, chapter 5 (Qual-itative Analysis of Nonlinear Systems: The Center Manifold Theorem).Lecture Notes.
[34] W. Zhang, R. Baskaran, and K.L. Turner. Effect of cubic nonlinearity onauto-parametrically amplified resonant MEMS mass sensor. Sens. Actua-
tors, A, 102:139–150, 2002.
[35] Y. Zhu. On the stability of inverted pendulum. final project for MATH605E at UBC, 2004.
191

Appendix A
Trigonometric Identities
cos (A) cos (B) =1
2(cos (A − B) + cos (A + B)) (A.1)
sin (A) cos (B) =1
2(sin (A − B) + sin (A + B)) (A.2)
sin (A) sin (B) =1
2(cos (A − B) − cos (A + B)) (A.3)
sin2θ = 1−cos 2θ
2
sin θ cos θ = sin 2θ
2
cos2 θ = 1+cos 2θ
2
sin3θ = 3 sin θ−sin 3θ
4
sin2θ cos θ = cos θ−cos 3θ
4
sin θ cos2 θ = sin θ+sin 3θ
4
cos3 θ = 3 cos θ+cos 3θ
4
sin4θ = 3−4 cos 2θ+cos 4θ
8
sin3θ cos θ = 2 sin 2θ−sin 4θ
8
sin2θ cos2 θ = 1−cos 4θ
8
sin θ cos3 θ = 2 sin 2θ+sin 4θ
8
cos4 θ = 3+4 cos 2θ+cos 4θ
8
192