Construction and Design of a robotic laparoscopic platform
15
Σχεδιασμός και κατασκευή Λαπαροσκοπικής Ρομποτικής Πλατφόρμας ANeμMoS-Group Παπαδόπουλος Γιώργος Ευαγγελίου Νίκος
-
Upload
georgios-marios-papadopoulos -
Category
Technology
-
view
87 -
download
2
description
2nd Place in Biomed Contest held by IEEE EMBS Greece Section and Hellenic Startup Association
Transcript of Construction and Design of a robotic laparoscopic platform

Σχεδιασμός και κατασκευή Λαπαροσκοπικής
Ρομποτικής Πλατφόρμας
ANeμMoS-Group
Παπαδόπουλος ΓιώργοςΕυαγγελίου Νίκος

Παπαδόπουλος Γιώργος: Προπτυχιακός Φοιτητής του ΤΗΜΤΥ, 4ο έτος
Ευαγγελίου Νίκος: Υποψήφιος Διδάκτωρ στον τομέα Σημάτων και Συστημάτων Αυτομάτου Ελέγχου του ΤΗΜΤΥ
Ποιοι είμαστεRobotics Surgery Group
Υποομάδα του ANeμΜοS Group (Applied Networked micro Mechatronic Systems) η οποία εστιάζει στην Ρομποτική Χειρουργική

Μικροεπεμβατική Χειρουργική(MIS)ΟρισμόςΜε αυτή τη μέθοδο, μια χειρουργική λειτουργία υποβοηθείται από μιαμικρή ενδοσκοπική κάμερα και πραγματοποιείται με λαπαροσκοπικάεργαλεία μέσα στο σώμα του ασθενούς με μικρά ανοίγματα ή τομές
Ανοιχτή Επέμβαση Κοινό Λαπαροσκοπικό Εργαλείο
Αυτόνομολαπαροσκοπικό εργαλείο

Πλεονεκτήματα MIS• Μικρές τομές με αποτέλεσμα μικρότερο τραύμα και λιγότερο πόνο• Ταχεία ανάρρωση και εξιτήριο από το νοσοκομείο σε 15-30 ώρες
Robot-Assisted MIS• Λιγότερη κούραση και μείωση στο τρεμούλιασμα για το χειρούργο• Βελτιωμένη όραση – 3D απεικόνιση και μεγέθυνση στις περιοχές
ενδιαφέροντος• Ανάδραση δύναμης κατά την αλληλεπίδραση με τον ιστό

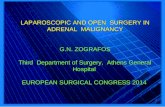
Υπάρχουσες χειρουργικές πλατφόρμες
Στόχος του ANeμΜοS MIS GROUP
DaVinciIntuitive Surgical4 4-DOF Robotic Arm Surgical System2-DOF effective tool2-camera-2-eye vision system
AmadeusTitan Medical4 7-DOF Robotic Arms Surgical System4-DOF effective tool (speculations)2-camera-2-eye vision system (speculations)
Κατασκευή καινοτόμων χειρουργικών λαπαροσκοπικών εργαλείων που να επιλύουν τα μειονεκτήματα των υπαρχόντων

Μειονεκτήματα υπαρχόντωνΚατά την μελέτη της υπάρχουσας βιβλιογραφίας και της αγοράς διαπιστώθηκαν τα εξής σημεία βελτίωσης στα υπάρχοντα εργαλεία:
•Μεγάλο μέγεθος: 10mm διατομή του εργαλείου – δυνατότητα περαιτέρω σμίκρυνσης.•Δύσκαμπτα robot: Μικρός αριθμός αρθρώσεων συνεπάγεται αδυναμία εκτέλεσης περίπλοκων κινήσεων στην κοιλιακή χώρα.•Μικρός χώρος εργασίας του robot: Μικρό αξιοποιήσιμο μήκος εργαλείου με αποτέλεσμα μικρό χώρο εργασίας και ανάγκη για πολλούς χειρισμούς.•Μεγάλο κόστος: Η χρήση ακριβών υλικών συνεπάγεται μεγάλο κόστος (αγοράς + συντήρησης).•Μηδενική αυτονομία: Η μη αυτοματοποιημένη κίνηση καθιστά την εκάστοτε επέμβαση εξαρτώμενη από τις γνώσεις και την εμπειρία του χειριστή και προ-απαιτεί πολλές ώρες εξάσκησης.•Απουσία απτικής ανάδρασης: Ο χειριστής δεν έχει αίσθηση της δύναμης που ασκεί στους ιστούς.•Απουσία στερεοσκοπικής μηχανικής όρασης: Τα υπάρχοντα συστήματα βασίζονται στην ανακατασκευή του 3D περιβάλλοντος από τον ανθρώπινο εγκέφαλο του χειριστή και όχι του υπολογιστή.

Γενικά Χαρακτηριστικά του βραχίονα• Πλεονάζοντες βαθμοί ελευθερίας: Χρειάζονται 8 ή 10 Β.Ε. ώστε να
προσδίδουν αυξημένη ευελιξία για περίπλοκες κινήσεις εντός της κοιλιακής χώρας.
• Ενεργοποίηση κίνησης με χρήση μορφομνήμονων κραμάτων (SMA): Ni-Ti καλώδια, διαμέτρου 0.2mm. Πλεονεκτήματά τους είναι το χαμηλό κόστος, μικρό μέγεθος, μεγάλο λόγο ισχύος/βάρους. Μειονεκτήματα είναι η υστέρηση που παρουσιάζουν κατά την λειτουργία, η οποία θα αντιμετωπιστεί με χρήση σύγχρονων τεχνικών ελέγχου.
• Μακροσκοπικά Σειριακό: Ανεξάρτητα κινηματικά κομμάτια θα είναι τοποθετημένα το ένα πάνω στο άλλο, σχηματίζοντας πολλές πλατφόρμες Steward για 3D κινήσεις.

Ο υπό βελτίωση βραχίονας

Βραχίονες που έχουν κατασκευαστεί-Υπάρχουσα εμπειρία
A. Mavrommati, E. Tzoracoleftherakis and A. Tzes, [MTT12_med] `Design and development of a hyper-redundant binary active laparoscopic manipulator’, In Proceedings of the 20th Mediterranean Conference on Control and Automation, pp. 327-332, July 3-6, 2012, Barcelona, Spain.
P. Giataganas, N. Evangeliou, Y. Koveos, E. Kelasidi, and A. Tzes, [GEKTT11_med], `Design and Experimental Evaluation of an Innovative SMA-Based Tendon-Driven Redundant Endoscopic Robotic Surgical Tool’, In Proceedings of the 19th Mediterranean Conference on Control and Automation, pp. 1071-1075, June 20-23, 2011, Corfu, Greece

Προς βελτίωση χαρακτηριστικάΕτοιμάζεται νέο μοντέλο με σκοπό να υπερκεράσει τα προβλήματα που είχαν τα προηγούμενα και να βελτιώσει τις αδυναμίες τους:
•Περαιτέρω σμίκρυνση (στα 7-8mm)•Μεγαλύτερη ευελιξία μέσω σειριακής διασύνδεσης περισσότερων μικροσκοπικών άκαμπτων μελών. •Αύξηση του χώρου εργασίας του robot (workspace – σχεδιασμός ώστε να φτάνει σε κάμψη ορθή γωνία-90ο )•Βελτίωση στο design για μείωση όγκου με πιο συμπαγή τοποθέτηση των ηλεκτρονικών.•Εισαγωγή καμερών για αυτονομία κίνησης και ανάδραση στερεοσκοπικής (3D) εικόνας στον χειριστή.•Καινοτόμοι αλγόριθμοι αυτονομίας: Αναγνώριση οργάνων-ιστών-σημείου επέμβασης•Προσθήκη χειριστηρίου με δυνατότητα απτικής ανάδρασης (Novint Falcon)•Χαμηλό κόστος: 2000 € για κάθε βραχίονα και συνολικά 10000 € για πλήρη πλατφόρμα

Ανταγωνιστικές ερευνητικές προσπάθειες• Hamlyn Center, Imperial College, London: Ανάπτυξη του i-Snake
•Carnegie Mellon University, Pennsylvania: Ανάπτυξη του HARP.
• Stanford University and Schonberg Research Corporation: Cyberknife
Μειονέκτημα η χρήση κινητήρων, αδύνατη τη χρήση του σε περιβάλλον μαγνητικού τομογράφου.
Χρησιμοποιεί SMA
Ακριβό κόστος κατασκευής και μεγάλος χρόνος συναρμολόγησης
Ακριβό κόστος κατασκευής
Μεγάλος χρόνος συναρμολόγησης
Ένας ρομποτικός βραχίονας

Readiness Levels
Technological Readiness Level (TRL)
Στόχος του startup είναι να παραδοθεί μία χειρουργική πλατφόρμα που να ικανοποιεί το 4ο επίπεδο
Clinical Readiness Level (TRL)
Παράδοση του προϊόντος με:
1.Εργαστηριακές δοκιμές του χειρουργικού βραχίονα προσκολλημένου στο DaVinci χειρουργικό ρομπότ του ιατρικού κέντρου “ΥΓΕΙΑ”.2.Δοκιμές όλης της πλατφόρμας στο εργαστήριο Αυτοματισμού και Ρομποτικής σε ανθρώπινο ομοίωμα.

ΧρονοδιάγραμμαTask Χρονική περίοδος
Κατασκευή ενός βραχίονα με τα προς βελτίωση χαρακτηριστικά
Νοέμβριος ‘12-Σεπτέμβριος ‘13
Εργαστηριακές δοκιμές στο LAR και στο DaVinci
Σεπτέμβριος ‘13-Νοέμβριος ’13
Κατασκευή πλατφόρμας πολλών βραχιόνων
Νοέμβριος 13-Απρίλιος ’14
Εργαστηριακές δοκιμές πλατφόρμας σε ομοίωμα
Απρίλιος ’14-Ιούλιος ’14 (Παράδοση προϊόντος)
(Know your limits ) Worst Case SenarioΣε περίπτωση έλλειψης πόρων-χρόνου θα υλοποιηθεί και θα παραδοθεί μόνο το πρώτο κομμάτι της κατασκευής ενός βραχίονα σαν τελικό προϊόν.

Χρηματοδότηση
1. Εργαστήριο Αυτοματισμού Ρομποτικής Τμήματος ΗΜ&ΤΥ2. ΑΝeμΜοS GROUP 3. ΕΣΠΑ 2007-2013 (Αναμένονται σχετικά calls)4. EU-FP7 Project (Αναμένονται σχετικά calls)5. Venture Capital
Συνεργασίες
1. Καθ. Αντώνιος Τζες, Senior Member IEEE2. ΑΝeμΜοS GROUP 3. Hamlyn Center for Robotic Surgery 4. Northeastern University, Chicago, Illinois5. Ιατρικό κέντρο “Υγεία”, χειρουργική ομάδα του χειρούργου και
καθηγητή Κ. Κωνσταντινίδη, DaVinci certified surgeon

Ευχαριστούμε για την προσοχή σας
URL: www.anemos.ece.upatras.gr
mailto: [email protected]@ece.upatras.gr