Conditions for transverse-regularity of serial manipulators · Conditions for transverse-regularity...
6
Click here to load reader
Transcript of Conditions for transverse-regularity of serial manipulators · Conditions for transverse-regularity...

1
Conditions for transverse-regularityof serial manipulators
A. Muller, MIEEE
Institute of Mechatronics at the Chemnitz University of Technology
Reichenhainer Straße 88, 09126 Chemnitz, Germany
Abstract— Transverse-regularity is a point-wise manipula-
tor property, ensuring that the singular set Σ is locally a
smooth manifold. A generic manipulator is one which is
transverse-regular in any configuration. This paper gives a
necessary and sufficient condition for transverse-regularity.
The condition requires the manipulator’s joint screws and
their screw products. An expression for the tangent space to
Σ at transverse-regular singularities is derived. It is shown
that a manipulator is non-generic if it can attain a pose
where the rank of the manipulator’s screw system together
with the screw products is not the maximal rank of the
Jacobian. A necessary and sufficient criterion for degree-
one singularities is given in terms of the mechanism’ joint
screws. In particular, any non-redundant manipulator is
transverse-regular in a degree-one singularity.
Keywords— Singularities, genericity, serial manipulators
I. Introduction
Singularities of generic manipulators constitute smoothmanifolds, e.g. smooth curves. This property makes iteasier to cope with singular poses of a serial manipulator(SM). It also makes it easier to trace the set of singulari-ties numerically. The question that needs to be addressedin the manipulator design, is that of the link geometriesthat yield a generic SM.
A number of papers are centered around this question. Theanswer should preferably lead to a guide for the construc-tion of generic manipulators. It was probably Pai and Leu[8] who first focused on generic SMs, adopting the notion ofgeneric mappings [4] to kinematics. They derived generic-ity conditions for 3-joint SMs and general SMs used for ori-entation, analyzing the determinant of the Jacobian. Tsaiet al. [10] extended this work to spatial non-redundant 6-joint and redundant 7-joint SMs, pursuing the use of thedeterminant. An exhaustive list of kinematic parametersis given in [8] that lead to generic 3R-SMs used for purerotations or translations. In [10] numerical algorithms aredeveloped, to inspect genericity of 6- and 7-joint SMs. Bur-dick [2] considered generic 3R-SMs as a subset of all 3R-SMs, and enumerated all non-generic 3-joint SMs.
These approaches so far are focused on non-redundant SMswith three or six joints with the aim to cover a wide range ofindustrial manipulators, where a six-joint SM is consideredas combination of a respectively three-joint orientation andpositioning device. Therewith, the authors were able toidentify all generic SMs that can be split into a translationand orientation part.
But, it remains to develop a universal genericity criterionfor SMs with an arbitrary task space and number of joints,
complementing the above results. Such criteria lead to con-ditions on the link geometry. The works cited above useDH parameters. Instead of using a specific parameteriza-tion like DH parameters, the mechanism’s screw systemprovides an alternative general description. This shall en-able the characterization in terms of screw systems.Checking for genericity of a SM requires checking that allits singularities are transverse-regular. The developmentof a genericity criterion therefore involves two constituentparts: a condition for transverse-regularity (a point-wiseproperty) and, based on that, conditions on the geometrythat guaranty transverse-regularity in any pose.This paper contributes to the first part, in that a necessaryand sufficient condition for transverse-regularity is devel-oped. The condition does not involve the screw entities asthey appear in the mechanism design, however. Therefore,the paper provides a few additional geometric transversal-ity criteria, entirely in terms of the mechanisms screw sys-tem. For general mechanisms they are either necessary orsufficient. The sufficient conditions admit to identify somegeneric SMs via the associated screw subalgebra.The paper is organized as follows. After a brief descriptionof the SM kinematics in section II, singularities are definedin section III. Section IV recalls the definition of genericmappings. Some preliminaries shall facilitate the applica-tion of the general concept to manipulators. The centralpart of the paper is the necessary and sufficient conditionfor transverse-regularity in section V. Conditions in termsof the mechanism’s joint screws are developed in sectionVI. Section VII gives an expression for the tangent spaceto the singular set, based upon the results in section V.The paper concludes with an example in section VIII.
II. Description of the manipulator kinematics
A SM is regarded a kinematic chain of n rigid bodies con-nected by revolute, prismatic or (general) screw joints. De-note with Yi ∈ R
6 the screw coordinate vector associatedwith joint i, expressed in an inertial frame, and with q ∈ V
n
the vector of joint variables qi. The configuration of (thereference frame on) body i = 1, . . . , n is expressed as [7]
Ci (q) = eY1q1 · · · eYiqi
mi, (1)
where mi is the reference configuration of body i for q = 0.Y is the se (3)-matrix associated to the screw coordinatevector Y . V
n is the configuration space and q ∈ Vn the
configuration of the SM. The reference frame of the termi-nal body n represents an end-effector (EE), mounted on the
Proceedings of the 15th Mediterranean Conference onControl & Automation, July 27 - 29, 2007, Athens - Greece
T30-005

2
terminal body. We refer to this frame as EE-frame. TheEE-configuration in q is Cn (q), and Cn : V
n → SE (3) iscalled the EE-map.In the configuration q the velocity V := C−1
n Cn of Bn isgiven in terms of the joint velocities q ∈ TqV
n by [5]
V (q)(q) =∑
i≤n
Ki(q) qi, (2)
where
Ki (q) = Ad−1mn
Ad−1
eYiqi···eYnqnYi, i = 1, . . . , n. (3)
The map K (q) : Rn → se (3) is called the EE-Jacobian.
Remark 1: The velocity V = (ω, v) is the twist of the EErelative to an inertial frame expressed in the EE-frame onthis body [7]. In mechanism analysis frequently an inertiaframe is used as reference. This distinction is crucial in thefollowing, for the selection of task velocity components.In technical applications it is often not the aim to generatearbitrary spatial EE-velocities, but certain velocity compo-nents, when expressed in the EE-frame. Denote with P aprojector onto the vector space of desired task velocities.
J (q) := P K (q) (4)
is called the manipulator Jacobian.Remark 2: A remark on the selector P is in order here.Generally the EE-Jacobian K, say with rank r, generatesEE velocities with more then r non-zero components. Inapplications only certain components are used, and P re-moves the unused components. This has consequences forthe dependence of the rank of J . In particular K may haveconstant rank, even if J becomes singular (ref. lemma 1).E.g. in case of a regional SM, P removes the angular part inV , which does in fact not vanish if the SM contains revolutejoints. In case of a planar SM used for planar manipulationP removes components of V that are zero anyway, so thatJ and K have the same effect. With this distinction wemust be careful if P 6= I.The vector space of in q feasible EE-velocities is
Dq := imK (q) = span (K1 (q) , . . . , Kn (q)) ⊆ se (3) ,(5)
and that of feasible task space velocities is PDq. An in-trinsic characteristic of a SM is the union of these vectorspaces at all possible configurations, denoted D. This is thevector space of EE velocities the SM can possibly generate.It can be constructed via the sequence of vector spaces
D(i+1)q := D(i)
q ∪ [X, Y ] |X ∈ D(1)q , Y ∈ D(i)
q , (6)
with D(1)q := Dq [7]. E.g. D
(2)q is the vector space spanned
by Ki (q) and their screw products. At every step the di-
mension of D(i) increases by at least one until D(κ+1)q =
D(κ)q , and because se (3) is six-dimensional κ < 6. The re-
spective vector space is denoted D := D(κ)q . D is obviously
closed w.r.t. the Lie bracket, and is hence a se (3) subalge-bra (screw algebra generated by K1 (q) , . . . , Kn (q)). More-over, κ ≤ κmax, with κmax for the respective subalgebra in
table 1. It can be shown that D is indeed independent of q(e.g. [6]). Thus J (q) ∈ L
(R
n, D), with L (A, B) denoting
the space of linear mappings between spaces A and B.Lemma 1: The dimension of Dq is independent of q1 and qn.Proof: Independence of q1 is obvious from (3). To showindependence of qn we use dim Dq ≡ dimAdCDq. Thestatement follows with AdCn
Kn = Yn = const. for anyC ∈ SE (3).Hence, the rank of K (q) does not dependent on q1 or qn.This is not necessarily so for the rank of J (q) if P 6= I.For later use we denote
d (q) := dimPDq, dm := maxq∈Vn
d (q) , ρ := n− dm.
d (q) ≡ rankJ (q) is called the rank of q, and ρ the degree
of redundancy. Accordingly, a SM is called redundant iffρ > 0 otherwise non-redundant.It is assumed hereafter that dm ≤ n and J (q) is a dm × nmatrix (i.e. J (q) is surjective for any q). A spatial 6R-SMfor example, used for positioning has D = se (3), PD = R
3.The partial derivatives of K admit the expression [5]
∂qj Ki = [Ki, Kj ], i < j (7)
in terms of Lie-brackets (screw-products) [7]. We also de-note [Ki (q) , Kj (q)]
P:= P [Ki (q) , Kj (q)]. The differen-
tial of J is the mapping J ′ (q) : TqVn ≡ R
n → L(R
n, PD).
Using (7) this is
J ′(q)(x)(y) =∑i≤n
∑i<j
[Ki (q) , Kj (q)]P
xjyi. (8)
III. Singular configurations
Our interest in generic SMs stems from the fact that theirsingularities constitute a (possibly not connected) smoothmanifold (see definition 1 below). Before addressing thisparticular case we shall recall some basics on singularities.A configuration q is regular iff it is a regular point of themapping Cn, otherwise q is a critical point (singularity forshort). This simply means that q is singular iff d (q) < dm.The degree of q is δ (q) := dm − d (q). Regular points arepoints of degree zero. A singularity q is called isolated iffthere is a neighborhood U (q) which contains only regularpoints. Denote the set of rank r singularities with
Σr := q ∈ Vn|d (q) = r. (9)
The variety Σ = Σ1 ∪ . . .∪Σdm comprises all singularities.Notice that some authors, e.g. [10], index the singular setby the degree δ instead of the rank.It is clear that the number of independent columns of Kcan not fall below the minimum number of screws necessaryto generate D. With our assumption dm ≤ n, this providesa lower bound on the rank of K and so on that of J .Corollary 2: The rank of K is bounded by mmin in table1. The rank d (q) of J , and so the degree δ (q), is boundedby mmin in table 1 and the restriction P of D.For example, a planar SM has D = se (2) for which theminimum rank is 2 (in a singularity the linear velocity com-ponents are dependent). So, the rankK ≥ 2. If P selectsthe angular velocity, J will never be rank deficient.
Proceedings of the 15th Mediterranean Conference onControl & Automation, July 27 - 29, 2007, Athens - Greece
T30-005

3
Σ can be resolved into the smooth manifold of regularpoints and the variety of its singularities. The latter mayhave itself singularities, and not be a manifold.The manifold of regular points is generally not connected ifΣ 6= ∅. Its connected submanifolds were calles ’aspects’ [1].The particular case when Σ is a smooth manifold, i.e. ithas no singularities, is the subject of the rest of the paper.Lemma 1 implies the following.Corollary 3: If P = I then dimΣ ≥ 2.Consequently, a SM with P = I cannot have isolated singu-larities, and not have singularities at all if n < 3. Notice,however, that a SM with n < 3 can have singularities ifP 6= I (as for regional manipulators with revolute joints).
IV. Generic serial manipulators
We now follow [8] and apply the general concept oftransversal mappings [4] to the manipulator Jacobian. Pre-liminarily, we give necessary definitions in a suitable form.The Jacobian is a mapping J : V
n → L(R
n, PD), which
assigns to each q the linear mapping J (q) from Rn to PD.
Denote with Lr ⊂ L(R
n, PD)
the subset of linear map-
pings of rank r. Lr is a submanifold of L(R
n, PD)
withcodimension (n− r) (dm − r) [4]. It is thus equivalent tosay that J (q) ∈ Lr, rankJ (q) = r or q ∈ Σr.The mapping J is called transversal to Lr at q iff eitherJ (q) /∈Lr or
TJ(q)Lr + imJ ′ (q) = L
(R
n, PD), (10)
where L(R
n, PD)
has been identified with its tangentspace. J is called transversal to Lr iff it is transversalto Lr at all q ∈ V
n. In this case Σr ≡ J−1 (Lr) is a sub-manifold of V
n with codimension (n− r) (dm − r), if notempty [4].We call J transverse-regular at q if it is transversal to allLr, r = 0, . . . , n at q. Of course, J is transverse-regular inall regular points.Definition 1: A serial manipulator is called generic if andonly if J is transverse-regular at all q ∈ V
n. A configurationq is called non-generic iff J is not transverse-regular at q(and hence the SM is not generic).Remark 3: The term ’generic’ refers to the remarkable factthat the set of all smooth mappings from R
n to PD whichare transversal to a submanifold M is a dense open subsetof L
(R
n, PD)
(Thom’s transversality lemma). That is,after a slight change of the geometry of a generic SM it islikely to end up with a SM that is again generic.Because of J (q) /∈ Lr, r 6= d (q) a SM is transverse-regularat q iff it is transversal to Ld(q) at q. Hence, singularities ofa generic SM form submanifolds with respective dimension
dimΣd(q) = n− (n− d (q)) (dm (q)− d (q)) . (11)
Only singularities can occur for which (11) is non-negative,as listed in [8], [10]. But, a further restriction is obvious:Remark 4: With corollary 3, for manipulators with P = I,all cases where dim Σd(q) < 2 must be excluded (they do notexist). For dim Σd(q) = 0 these are: n = 4, dm = 4, d (q) =2; n = 6, dm = 5, d (q) = 3; n = 8, dm = 6, d (q) = 4; and
for dimΣd(q) = 1: n = 5, dm = 5, d (q) = 3; n = 7, dm = 6,d (q) = 4; and all SMs with dm = d (q) + 1 = 2.
V. A Necessary and Sufficient Condition
for transverse-regularity
We have seen that J being generic is sufficient for Σ to bea smooth manifold. In order to analyze genericity we needto check for transverse-regularity in all q ∈ V
n.Since J (q) ∈ Ld(q) the condition for transverse-regularityat q is that (10) holds with r = d (q). The crucial point inapplying (10) is the characterization of TJ(q)L
r. For thiswe make use of the results in [4].The basic idea is to split R
n and PD according to the rangeand image space of J (q). The image space is PDq. Its com-plement in PD is denoted with PNq, where Nq := D\Dq.Denote the kernel and range of J (q) respectively withKq := kerJ (q) and Rq := R
n\Kq. Then, by definition,J (q) ∈ L (Rq, PDq).Any linear mapping M ∈ L
(R
n, PD)
can be split intoM = M1 + M2 + M3 + M4, where M1 ∈ L (Rq, PDq),M2 ∈ L (Rq, PNq), M3 ∈ L (Kq, PDq), M4 ∈ L (Kq, PNq).According to lemma 3.2 in chapter VI of [4]
TJ(q)Lr(R
n, PD)
= M ∈ L(R
n, PD)|M4 = 0. (12)
That is, to show transverse-regularity of J in q it must beshown that for any y ∈ Kq and X ∈ PNq there is a x ∈ R
n
such that X = J ′(q)(x)(y). The expression (12) and (8)gives rise to a transversality condition, as follows.A basis on PDq is constituted by d (q) column vectorsJi (q) , i ∈ ID of the Jacobian
PDq = span (Ji (q) , i ∈ ID) , (13)
where ID ⊆ 1, . . . , n is the corresponding index set.The remaining columns are then the linear combinationsJi(q) =
∑j∈ID
ajiJj(q) , i /∈ ID for some aj
i ∈ R.The independent solutions of Jy = 0 constitute a basisbk, k ∈ IK on the kernel Kq, i.e.
Kq := span (bk, k ∈ IK) , (14)
where IK := 1, . . . , n\ID is the (n− d (q))-dimensionalindex set. Such a basis is given by the columns of theorthogonal complement b of J (q). This is a n× (n− d (q))matrix such that J (q) b = 0, with entries
bik :=
δi
k, i ∈ IK
−aik, i ∈ ID .
(15)
We can now express the part of the differential (8) withrange Kq. The basis (15) induces a parametrization of Kq,such that y =
∑k∈Ik
bkuk for all y ∈ Kq, with parameter
manifold Rn−d(q). In this parametrization the L
(Kq, PD
)-
part of (8) is expressed as H(q)(x)(u) := J ′(q)(x)(y(u))
H(q)(x)(u) =∑
i≤n
∑
i<j
∑
k∈IK
[Ki(q) , Kj(q)]P xjbikuk
=∑
k∈IK
∑
j≤n
Hkj(q)xjuk, (16)
Proceedings of the 15th Mediterranean Conference onControl & Automation, July 27 - 29, 2007, Athens - Greece
T30-005

4
with Hkj :=∑
i<j
[Ki(q) , Kj(q)]P bik. (17)
For any (q, x) ∈ TVn, H(q)(x) ∈ L
(R
n−d(q), PD).
The final step is to identify this part of H(q)(x) that mapsto PNq. Since there is no biinvariant metric on SE (3)(i.e. invariant w.r.t. a change of the inertial and the EE-frame) there is no unique meaning of orthogonality of twistvectors. Therefore we make a detour via the annihilator ofDq: annDq = W ∈ se∗ (3) |W ·X = 0, X ∈ Dq. This isthe set of wrenches that perform no work on EE-twist.Let Wl, l ∈ IN := 1, . . . , δ (q) be a basis on annDq
annDq = span (Wl, l ∈ IN ) . (18)
Such a basis is given by the columns of the orthogonalcomplement W of JT(q), i.e. JT(q)W = 0. It is importantto notice the geometric meaning of the co-screws Wl ∈se∗ (3). They cannot embody a basis on Nq ⊆ se (3). But,due to W ·X 6= 0, W ∈ annDq if and only if X ∈ Nq, theannihilator provides a way to identify the Nq-componentsof H(q)(x). The paring with the basis vectors Wl gives riseto a mapping H(q)(x) ∈ L
(R
n−d(q), Rδ(q))
H(q)(x)(u) :=
H1(q)(x)(u)
...
Hδ(q)
(q)(x)(u)
,
where Hl(q)(x)(u) := Wl ·H(q)(x)(u), l ∈ IN . So PNq can
be identified with Rδ(q).
If D(2)q ⊂ D at least one of these inner products vanishes.
Remark 5: It is worth emphasizing that, due to the lackof a biinvariant metric on SE (3), there is no coordinateinvariant way to define orthogonality. However, the pair-ing W ·X is invariant, and so is the above spliting of Dq.A definition of orthogonality frequently found in the liter-ature relies on the vanishing of the reciprocal product oftwo screw entities. But, the reciprocal product does notprovide an inner product. In fact, a screw system and itsreciprocal system may not even be disjoint subsets of se (3)[3].
Denote the components of Hl(q) , l ∈ IN with
Hl
kj(q) := Wl ·Hkj(q) .
For each l,(H
l
kj(q))
is a (n− d (q))× n matrix.We can now give the main result of this paper.Theorem 4: A SM with dm ≤ n is transverse-regular in q
if and only if all matrices(H
l
kj(q)), l ∈ IN have full rank.
Proof: L (Kq, PNq) is identified with L(Rn−d(q), Rδ(q)).For any u ∈ R
n−d(q) and a ∈ R there is a x ∈ Rn such
that a = Hl(q)(x)(u) if and only if
(H
l
kj(q))
has full rank.
Thus, for any u ∈ Rn−d(q) and v ∈ R
δ(q) there is a x ∈ Rn
such that v = H(q)(x)(u) if and only if this holds for allcomponents.The application of the above test requires the constructionof the bases b and W . In order circumvent the use of theindex sets ID and IN we add the following remark.
Remark 6: The columns and rows of the Jacobian in q canbe rearranged in a matrix J (q) such that
J (q) =
d←→ n−d←→(A
E
B
F
)l d
l δ
(19)
This structure is achieved by resorting d (q) independentcolumns of J (q) to the left side of J (q), followed by shiftingd (q) independent row vectors to the top of this matrix. Thematrix A has full rank d (q). Thereupon, the orthogonal
complement of J (q) and JT
is respectively
b =
(−A−1B
In−d
), W =
(−(EA−1)T
Iδ
).
Test Scheme for Transverse-Regularity in q
1. optional: check necessary condition (20), of lemma 52. find d (q) linear independent Ji (q), compose ID
3. determine aji so that Ji (q) =
∑j∈ID
ajiJj (q)
4. determine the orthogonal complement b of J (q),this yields the basis bk on Kq
5. determine orthogonal complement W of JT(q),this yields the basis Wl on annDq
6. construct matrices H lkj(q)
7. transverse-regularity iff rank(H
l
kj(q))= n−d (q) , l∈IN
VI. Geometric Conditions for
Transverse-Regularity
The above result provides a general criterion to test fortransverse-regularity of a particular SM in a given configu-ration. It does, however, not yield conditions (at least notimmediately) that may help to identify classes of genericmanipulators. Such condition should preferably be ex-pressed using geometric entities. In this section we givea few simple criteria in terms of the mechanism’s screwsystem that admit classification of some SMs.With (12) the transverse-regularity condition (10) is thatJ ′ (q) spans L (Kq, PNq), i.e.
L (Kq, PNq) = span ([Ki (q) , Kj (q)]P
i, j = 1, . . . , n),
where the range limit j < i can be ignored due to the skewsymmetry of the Lie bracket.Lemma 5: Necessary for transverse-regularity of a SM in qis
PD = PD(2)q . (20)
Proof: According to (12), Nq ⊆ im J ′ (q) is necessaryfor (10). With (8) this is equivalent to PD = PDq ∪span ([Ki(q), Kj(q)]P , i < j). Due to the skew symmetryof the Lie bracket the index range in the bracket terms can
be ignored. Hence PD = PD(2)q if Nq ⊆ imJ ′ (q).
The condition (20) embodies requirements on the manipu-
lator geometry (and is equivalent to PD(3)q = PD
(2)q ). So,
it shall be possible to determine geometric parameters forwhich (20) fails, leading to non-generic SMs.
The following is a consequence of D(i−1)q ⊂ D
(i)q .
Proceedings of the 15th Mediterranean Conference onControl & Automation, July 27 - 29, 2007, Athens - Greece
T30-005

5
Corollary 6: A SM with D for which κmax ≤ 2 in table 1,fulfils the necessary condition (20) in any configuration.Theorem 7: Sufficient for transverse-regularity in a degree-one singularity is that
[Ki, Ki+1]P 6= 0, i = 1, . . . , n− 1. (21)
Proof: Follows from (8).The condition (21) requires that the screws of adjacentjoints do not commute. In particular, linear dependentscrews commute, since Ki = aKi−1 → [Ki, Ki−1] = 0. Foran orientation SM, P extracts the angular part, and so[Ki, Ki−1]P = 0 iff either the SM contains prismatic jointsor the axes of adjacent revolute joints are parallel. If noneof these is the case the sufficient condition (21) holds.Pai and Leu [8] analyzed the determinant of J and con-cluded that an orientation SM with n revolute joints isgeneric if and only if no adjacent joint axes are parallel.Thus (21) is also necessary for such SMs.The majority of industrial SMs are non-redundant. Forthese, (20) is also sufficient in degree-one singularities.Lemma 8: A non-redundant SM with P = I is transverse-regular in any degree-one singularity.
Proof: The necessary condition D = D(2)q of lemma 5 holds
in degree-one singularities since dim D(2)q ≥ dim Dq+1. Let
(bi) ∈ Rn be a basis on the one-dimensional Kq = span (b).
Now assume that J ′(q)(x)(y) ∈ Dq, ∀x ∈ Rn, y ∈ Kq. Then
∑i≤n
∑i<j
[Ki (q) , Kj (q)] xibj =∑i≤n
aiKi (22)
for some a ∈ Rn. Choosing x = a, (22) requires that∑
i<j
[Ki (q) , Kj (q)] bj = Ki. This is not possible, and at
least one of the brackets in the expression for J ′ is not inDq, in contradiction to the assumption. One such bracketis enough to constitute a basis on the one-dimensional Nq.Thus, J ′(q)(x)(y) ∈ Nq, y ∈ Kq for some x ∈ R
n.
The following is due to dimD(2)q ≥ dimDq +1 ≥ mmin +1.
Corollary 9: A non-redundant SM with P = I, and withD for which mmin = n− 1 in table 1, is generic.For example (dm = 3) any non-redundant planar, sphericaland regional SM is generic. It must be noticed that P = Imeans that the spherical SM has only revolute and theregional only prismatic joints. In fact a regional 3R SMcan be non-generic [2].For spatial SMs (dm = 6) corollary 9 ensures transverse-regularity in any degree-one singularity. A generic spatialSM can only exhibit singularities of degree one and two. Indegree-two singularities the general condition of theorem 4is to be checked. Any other degree proves non-genericity.
VII. Singular motions
The interest in generic SMs originated from the fact thattheir singularities constitute smooth submanifolds of V
n.Provided transverse-regularity in q, then Σ is a locally amanifold of dimension n− (n− d(q)) δ(q).The tangent space to this manifold reveals the direction ofmotions that would trace the singularities. It can be deter-mined with the above results. Due to (12) the L (Kq, PNq)-part of J ′ (q) (x) must be zero for all x ∈ R
n. That is, any
y ∈ Kq must be mapped to PDq. Hence
TqΣd(q)= TqΣ =x ∈ R
n|J ′ (q) (x) (y) ∈ PDq, ∀y ∈ Kq=x ∈ R
n|H (q) (x) = 0 = kerU (q) (23)with the (n− d (q)) · δ (q)× n matrix
U (q) :=
H1
kj (q)...
Hδ(q)
kj (q)
. (24)
Because(H
l
kj(q))
is the projections onto the lth compo-
nent of Rδ(q) these matrices are linearly independent and
U (q) has full rank. So, dimTqΣ = n− (n− d (q)) · δ (q), incorrespondence with (11).Remark 7: We are thus able to characterize the motionthrough a transverse-regular q, for which the SM remainssingular. The knowledge of TqΣ can be used for SM controlas the x ∈ TqΣ are exactly the ’singular directions’ in V
n.A control scheme through a singularity q should avoid mo-tions through q along x, but try to cross it ’transversely’.The vector space of ’singular directions’ in the task spaceis Sq := X ∈ D|Wl ·X 6= 0, l ∈ IN. Notice that we wouldnot arrive at a vector space if we would use the reciprocalproduct. In fact this would in general yield a cone in D.
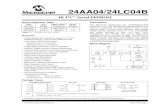
VIII. An example: non-generic 6R-manipulator
As example the non-redundant 6R-SM (P = I), with mu-tually orthogonal joint axes in, figure 1 is analyzed. Alllinks have length L, except the last link carrying the EE,which has length 1
2L.
q1
q2
q4
q5
q6
q3
EE-frame
L
L/2
Fig. 1. 6R SM in the singular configuration q0.
A. Transverse-regular singularity of degree 1
Figure 1 shows the 6R-SM in its configuration q0. With theshown EE frame, the joint screws comprise the Jacobian
K (q0) =
0 − 12
√3 0 1
2
√3 0 0
0 − 12 0 − 1
2 0 11 0 1 0 1 0
12
√3L 0
√3L 0 0 0
0 0 12L 0 3
2L 00 3
4L 0 − 14L 0 − 1
2L
.
In q0 the Jacobian has not full rank: dim Dq0= rankK (q0)
= 5, δ (q0) = 1. The Lie-brackets yield D(2)q0
= D = se (3).
Proceedings of the 15th Mediterranean Conference onControl & Automation, July 27 - 29, 2007, Athens - Greece
T30-005

6
A basis vector on the one-dimensional kernel Kq isb1 = (0, 1, 0, 1, 0, 1). The kernel of KT (q0) is spannedby W1 =
(L/√
3, L/2, 0, 0, 0, 1), which is a basis on
the one-dimensional annDq. This gives the 1 × n-
matrix U (q0) =(0, 0,√
3L, 0,−√
3L, 0)
in (24). Dueto rankU (q0) = 1 = (6− d (q0)) δ (q0) the SM istransverse-regular in q0, consulting theorem 4. This also
follows from D = D(2)q0
with corollary 8. The ma-trix U (q0) determines the 5-dimensional tangent spaceTq0
Σ5 = kerU (q0) = x ∈ R6|x3 = x5.
B. Transverse-regular singularity of degree 2
Another singularity q1, with degree δ (q1) = 2, occurs inthe ’stretched’ configuration of the 6R-SM, that is, if links2, . . . , 6 all lie along a straight line. The Jacobian is
K (q1) =
0 0 0 0 0 00 1 0 1 0 11 0 1 0 1 0
92L 0 0 0 0 00 0 7
2L 0 32L 0
0 − 92L 0 − 5
2L 0 − 12L
.
A basis for the two-dimensional Kq1and annDq1
is re-spectively b1 = (0, 1, 0,−2, 0, 1) , b2 = (2, 0,−3, 0, 1, 0) andW1 = (0, 0, 0, 1, 0, 0) , W2 = (1, 0, 0, 0, 0, 0). The necessary
condition D(2)q1
= D is fulfilled. The matrix
U (q1) =
((H
1
kj(q1))
(H
2
kj(q1))
)=
0 0 0 2L 0 00 0 1 0 −1 00 0 2L 0 0 00 −2 0 1 0 0
has full rank, proving transverse-regularity at q1, and yieldsTq1
Σ4 = kerU (q1)= x ∈ R6|x2 = x3 = x4 = x5 = 0.
The singularities are independent of q1 and q6 (lemma 1).
C. Non-generic singularity of degree 3
The 6R SM exhibits a singularity with δ (q2) = 3 in its’folded’ configuration q2, i.e. when the axes of joints 2,4and 6, as well of joint 3 and 5 coincide. In this configuration
Dq2⊂ D
(2)q2⊂ D
(3)q2
= D, and the necessary condition (20)is not satisfied. Hence, q2 is a non-generic singularity, andthe 6R-SM is not generic.
IX. Suggestions for future work
In this paper we have developed a necessary and sufficientcondition for transverse-regularity of a general SM in agiven configuration q. Yet a universal necessary and suffi-cient criterion for genericity does not exist. That is a condi-tion for transverse-regularity in any configuration. Giventhe results so far, we propose to elucidate the geometricmeaning of theorem 4 by reformulating it in terms of jointscrews. Thereupon, an equivalent transverse-regularitycondition could be formulated. Since this is inherently ex-pressed using screw entities it shall be possible to deducemanipulator geometries that ensure this condition to hold.Also the geometric criteria in section VI can possibly bedeveloped further to conditions for specific types of SMs.
n D mmin κmax Standard basis
6 se (3) 2 4 Ω1, Ω2, Ω3, T1, T2, T3
4 t (3) + so (2) 2 3 Ω3, T1, T2, T3
3 se (2) 2 2 Ω3, T1, T2
se (2) 2 2 hΩ3, T1, T2 (h-pitch)
so (3) 2 2 Ω1, Ω2, Ω3
t (3) 3 1 T1, T2, T3
2 t (1) + so (2) 2 1 Ω3, T3
t (2) 2 1 T1, T2
1 t (1) 1 1 T3
so (2) 1 1 Ω3
so (2) 1 1 Ω3 + hT3
TABLE I
D denotes the n-dimensional se(3)-subalgebra.
Appendix
Denote with Eα ≡ Ω1,Ω2,Ω3,T1,T2,T3 a basis on se (3),deduced from a reference frame. Therein, Ωi constitutesa basis for so (3), and Ti one on t (3) ≃ R
3. se (3) isthe semidirect sum of so (3) and the Abellian t (3), i.e. forY ∈ t (3), [X, Y] ∈ t (3) if X ∈ so (3) and [X, Y] = 0 if X ∈t (3). In particular, [Ωi, Ωj ] = εjikΩk, [Ωi, Tj] = εjikTk and[Ti, Tj ] = 0, which determines the structure constants cαβγ
of se (3) appearing in the Lie-bracket [Eα, Eβ] = εαβγEγ .This gives rise to the listing in table 1. For any subalgebraD, there is a minimum number mmin of basis elements thatare necessary in order to generate D as involutive closureof D. That is, if D is the span of these basis elements,than D = D(κmax) for a certain κmax. To the minimalmmin corresponds the maximal iteration depth κmax of Lie-brackets necessary to generate D from D.
References
[1] P. Borrel, A. Liegeois: A study of multiple manipulator inversekinematic solutions with applications to trajectory planning andworkspace determination, IEEE ICRA, 1986, pp. 1180-1185
[2] J.W. Burdick: A Classification of 3R Regional Manipulator Sin-gularities and Geometries, Mech. Mach. Theory, 30, 1995
[3] J.S. Dai, J.R. Jones: Interrelationship between screw systemsand corresponding reciprocal systems and applications, Mech.Mach. Theory, 36, 2001
[4] M. Golubitsky, V. Guillemin: Stable mappings and their singu-larities, Springer, 1973
[5] A. Muller, P. Maisser: Lie group formulation of kinematics anddynamics of constrained MBS and its application to analyticalmechanics, Multibody System Dynamics, Vol. 9, 2003
[6] A. Muller: A Conservative Elimination Procedure for Redun-dant Closure Constraints in MBS Models, Multibody SystemsDynamics, Vol. 16, no. 4, 2006, pp. 309-330
[7] R.M Murray, Z. Li, S. S. Sastry: A mathematical Introductionto robotic Manipulation, CRC Press, 1993
[8] D.K. Pai, M.C. Leu, Genericity and Singularities of Robot Ma-nipulators, IEEE Trans. Robot. Automat, 1992
[9] J.M. Selig, Geometrical methods in robotics, Springer, 1996[10] K.Y. Tsai, J. Arnold, D. Kohli: Generic maps of mechanical
manipulators, Mech. Mach. Theory, Vol. 28, No. 1, 1993, 53-64
Proceedings of the 15th Mediterranean Conference onControl & Automation, July 27 - 29, 2007, Athens - Greece
T30-005