Computer Implementation: Specialized Approachmbt/740/Course Notes/Chapter 3 Part c.pdf · •...
32
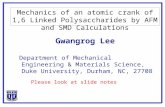
46 Computer Implementation: Specialized Approach • In this example, frames are assumed to be at joints. This is a deviation from our approach that we will not repeat. • It is done to produce a more compact code and show how the Newton-Raphson algorithm. Example: Kinematic Analysis of a four-bar mechanism. X 1 Y 1 X 3 θ 2 O Y 3 Y 2 θ 3 A X 4 Y 4 B C θ 1 θ 4 X 2 System coordinates are: q= � θ 2 θ 3 θ 4 �
Transcript of Computer Implementation: Specialized Approachmbt/740/Course Notes/Chapter 3 Part c.pdf · •...

46
Computer Implementation: Specialized Approach
• In this example, frames are assumed to be at joints. This is a deviation from our approach that we
will not repeat.
• It is done to produce a more compact code and show how the Newton-Raphson algorithm.
Example: Kinematic Analysis of a four-bar mechanism.
X1
Y1X3
θ2
O
Y3
Y2θ3A X4
Y4B
Cθ1
θ4
X2
System coordinates are:
q = �θ2θ3θ4�

47
The machine has one degree of freedom (𝜃𝜃2). Therefore the kinematic constraint equation is,
�𝑅𝑅1𝑥𝑥𝑅𝑅1𝑦𝑦𝜃𝜃2
� = �𝑙𝑙2 cos𝜃𝜃2 + 𝑙𝑙3 cos 𝜃𝜃3 + 𝑙𝑙4 cos𝜃𝜃4 − 𝑙𝑙1 cos 𝜃𝜃1𝑙𝑙2 sin𝜃𝜃2 + 𝑙𝑙3 sin𝜃𝜃3 + 𝑙𝑙4 sin𝜃𝜃4 − 𝑙𝑙1 sin𝜃𝜃1
𝜃𝜃2 − 𝜔𝜔2𝑡𝑡 − 𝜃𝜃𝑜𝑜2� = �
000�
The above equation is based on the assumption that the crank runs with a uniform velocity of 𝜔𝜔2 starting
at angle, 𝜃𝜃2𝑜𝑜.
The Jacobian matrix of the constraint equations,
𝐶𝐶𝑞𝑞 = �−𝑙𝑙2 sin𝜃𝜃2 −𝑙𝑙3 sin𝜃𝜃3 −𝑙𝑙4 sin𝜃𝜃4𝑙𝑙2 cos𝜃𝜃2 𝑙𝑙3 cos 𝜃𝜃3 𝑙𝑙4 cos𝜃𝜃4
1 0 0�

48
Velocity analysis
�̇�𝑞 = −𝐶𝐶𝑞𝑞−1𝐶𝐶𝑡𝑡
where,
𝐶𝐶𝑞𝑞 = �−𝑙𝑙2 sin𝜃𝜃2 −𝑙𝑙3 sin𝜃𝜃3 −𝑙𝑙4 sin𝜃𝜃4𝑙𝑙2 cos𝜃𝜃2 𝑙𝑙3 cos 𝜃𝜃3 𝑙𝑙4 cos𝜃𝜃4
1 0 0�
Ct = �00
−𝜔𝜔2�
Acceleration Analysis �̈�𝑞 = 𝐶𝐶𝑞𝑞−1𝑄𝑄𝑑𝑑
The vector Qd is
𝑄𝑄𝑑𝑑 = −�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞 − 2𝐶𝐶𝑞𝑞𝑡𝑡�̇�𝑞 − 𝐶𝐶𝑡𝑡𝑡𝑡
Remember that Ct is,
𝐶𝐶𝑡𝑡 = �00
−𝜔𝜔2�
This matrix does not have any term that is in terms of time explicitly. Therefore,
𝐶𝐶𝑞𝑞𝑡𝑡 = 0
𝐶𝐶𝑡𝑡𝑡𝑡 = 0
𝐶𝐶𝑞𝑞�̇�𝑞 = �−𝑙𝑙2 sin𝜃𝜃2 −𝑙𝑙3 sin𝜃𝜃3 −𝑙𝑙4 sin𝜃𝜃4𝑙𝑙2 cos 𝜃𝜃2 𝑙𝑙3 cos𝜃𝜃3 𝑙𝑙4 cos 𝜃𝜃4
1 0 0� �θ̇2θ̇3θ̇4� = �
−θ̇2𝑙𝑙2 sin𝜃𝜃2 −θ̇3𝑙𝑙3 sin𝜃𝜃3 −θ̇4𝑙𝑙4 sin𝜃𝜃4θ̇2𝑙𝑙2 cos 𝜃𝜃2 +θ̇3𝑙𝑙3 cos 𝜃𝜃3 +θ̇4𝑙𝑙4 cos𝜃𝜃4
θ̇2�
The vector Qd is reduced to,
𝑄𝑄𝑑𝑑 = −�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞 = −�−θ̇2𝑙𝑙2 cos 𝜃𝜃2 −θ̇3𝑙𝑙3 cos 𝜃𝜃3 −θ̇4𝑙𝑙4 cos𝜃𝜃4−θ̇2𝑙𝑙2 sin𝜃𝜃2 −θ̇3𝑙𝑙3 sin𝜃𝜃3 −θ̇4𝑙𝑙4 sin𝜃𝜃4
0 0 0� �θ̇2θ̇3θ̇4�

49
Matlab Program for Kinematic Analysis of a 4-Bar Mechanism
close all clear all % Analysis of a Four-bar Mechanism Using Newton Raphson's Method r1=0.35; %fixed link r2=0.2; %crank r3=0.35; %coupler r4=0.25; %output %The mechanism is a crank-rocker since 0.35+0.2 < 0.35+0.25 theta1=0; %fixed link angle %Initial Guess theta20=57.27; theta30=10; theta40=245; %input parameters t(1)=0; dt=0.02; %seconds omega2=5; % input velocity (rad/s) imax=64; %number of time steps converge=0; epsilon1=0.01; %dtheta accuracy epsilon2=0.01; %C accuracy i=1; while i<=imax t(i)=(i)*dt; theta2(i)=theta20+omega2*t(i)*(180/pi); %adjust initial conditions based on the step # if i==1 theta2(i)=theta20; theta3(i)=theta30; theta4(i)=theta40; else theta2(i)=theta2(i-1); theta3(i)=theta3(i-1); theta4(i)=theta4(i-1); end; %Newton Raphson for Position Analysis while converge==0 C=[r2*cosd(theta2(i))+r3*cosd(theta3(i))+r4*cosd(theta4(i))-r1*cosd(theta1);...

50
r2*sind(theta2(i))+r3*sind(theta3(i))+r4*sind(theta4(i))-r1*sind(theta1);... theta2(i)-omega2*t(i)*(180/pi)-theta20]; Cq=[-r2*sind(theta2(i)),-r3*sind(theta3(i)),-r4*sind(theta4(i));... r2*cosd(theta2(i)),r3*cosd(theta3(i)),r4*cosd(theta4(i));... 1,0,0]; dtheta=-inv(Cq)*C; %update thetas theta2(i)=theta2(i)+dtheta(1); theta3(i)=theta3(i)+dtheta(2); theta4(i)=theta4(i)+dtheta(3); %Termination Criteria if sum(abs(dtheta))<epsilon1 | sum(abs(C))<epsilon2 converge=1; i=i+1; end; end; converge=0; end; for i=1:imax %velocity Analysis Ct=[0;0;-omega2]; Cq=[-r2*sind(theta2(i)),-r3*sind(theta3(i)),-r4*sind(theta4(i));... r2*cosd(theta2(i)),r3*cosd(theta3(i)),r4*cosd(theta4(i));... 1,0,0]; vtheta=-inv(Cq)*Ct; theta2d(i)=vtheta(1,1); theta3d(i)=vtheta(2,1); theta4d(i)=vtheta(3,1); %Acceleration Analysis
Qd=-[-theta2d(i)*r2*cosd(theta2(i)),-theta3d(i)*r3*cosd(theta3(i)),-theta4d(i)*r4*cosd(theta4(i));...
-theta2d(i)*r2*sind(theta2(i)),-theta3d(i)*r3*sind(theta3(i)),-theta4d(i)*r4*sind(theta4(i));... 0,0,0]*[theta2d(i);theta3d(i);theta4d(i)]; atheta=inv(Cq)*Qd; theta2dd(i)=atheta(1,1); theta3dd(i)=atheta(2,1); theta4dd(i)=atheta(3,1); end; % Calculate joints xa=r2*cosd(theta2); ya=r2*sind(theta2); xb=r2*cosd(theta2)+r3*cosd(theta3); yb=r2*sind(theta2)+r3*sind(theta3);

51
plot(xa,ya,'r','LineWidth',2); hold on; plot(xb,yb,'g','LineWidth',2); legend ('Crank','Output Link') axis([-0.5 0.5 -0.5 0.5]) axis equal grid on %plot the links figure for i=1:imax %Generate the links at every instant x(1,i)=0; y(1,i)=0; x(2,i)=xa(i); y(2,i)=ya(i); x(3,i)=xb(i); y(3,i)=yb(i); x(4,i)=r1*cos(theta1); y(4,i)=r1*sin(theta1); plot(x(1:4,i),y(1:4,i)) hold on end; axis([-0.5 0.5 -0.5 0.5]) title ('motion of the links') axis equal grid on %plot angular velocities figure plot(t,theta2d,'-',t,theta3d,'--',t,theta4d,'-.','LineWidth',2) legend('omega_2','omega_3','omega_4','Location','SouthWest') title ('Angular velocities of the three links') grid on %plot angular accelerations figure plot(t,theta2dd,'-',t,theta3dd,'--',t,theta4dd,'-.','LineWidth',2) legend('alpha_2','alpha_3','alpha_4','Location','NorthWest') title ('Angular accelerations of the three links') grid on

52
-0.4 -0.2 0 0.2 0.4 0.6-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Crank
Output Link
-0.4 -0.2 0 0.2 0.4 0.6-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5motion of the links

53
0 0.2 0.4 0.6 0.8 1 1.2 1.4-10
-5
0
5Angular velocities of the three links
omega2
omega3
omega4
0 0.2 0.4 0.6 0.8 1 1.2 1.4-100
-50
0
50
100
150
200
250Angular accelerations of the three links
alpha2
alpha3
alpha4

54
Effect of Accuracy ε1 and ε2 ε1 = ε2 = 0.1
ε1 = ε2 = 0.01
ε1 = ε2 = 0.001
The results show a gradual improvement in the quality of the output curve.
-0.4 -0.2 0 0.2 0.4 0.6-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Crank
Output Link
-0.4 -0.2 0 0.2 0.4 0.6-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Crank
Output Link
-0.4 -0.2 0 0.2 0.4 0.6-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Crank
Output Link

55
Homework • Develop the equations of motion for an offset crank-slider mechanism (Problem 3.4). • Write a program analyzing the motion of this mechanism using the approach presented in this
section. • Plot motion (displacement, velocity and acceleration of the end of the manipulator) versus time. • Compare results with those obtained using a commercial software.

56
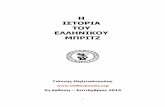
Computer Implementation: Standardizing the Kinematics
• It is of interest to automate the generation of the constraint equations when creating a general-
purpose computer program for kinematic analysis.
Choice of the Coordinates: • A more standardized way to analyze kinematics by placing frame at the center of masses. This will
make the analysis more suited for dynamics.
X1
Y1
X3
θ2
O
Y3
X2Y2 θ3AX4
Y4
B
Cθ1
θ4
The ground constraints are,
�𝑅𝑅1𝑥𝑥𝑅𝑅1𝑦𝑦𝜃𝜃1
� = �000�
The revolute joint constraints are:
𝑅𝑅1 + 𝐴𝐴1 𝑢𝑢�1𝑂𝑂 − 𝑅𝑅2 − 𝐴𝐴2 𝑢𝑢�2𝑂𝑂 = 0
𝑅𝑅2 + 𝐴𝐴2 𝑢𝑢�2𝐴𝐴 − 𝑅𝑅3 − 𝐴𝐴3 𝑢𝑢�3𝐴𝐴 = 0
𝑅𝑅3 + 𝐴𝐴3 𝑢𝑢�3𝐵𝐵 − 𝑅𝑅4 − 𝐴𝐴4 𝑢𝑢�4𝐵𝐵 = 0
𝑅𝑅4 + 𝐴𝐴4 𝑢𝑢�4𝐶𝐶 − 𝑅𝑅1 − 𝐴𝐴41 𝑢𝑢�1𝐶𝐶 = 0
𝑢𝑢�𝑖𝑖𝑂𝑂 𝑢𝑢�𝑖𝑖𝐴𝐴 𝑢𝑢�𝑖𝑖𝐵𝐵 𝑢𝑢�𝑖𝑖𝐶𝐶 are the local position vectors of O A B C in the frame of link i. In this case, 𝑢𝑢�1𝑂𝑂 = 0
Ai is the transformation matrix from link i to the global coordinate system
Ri is the global position of the origin of frame i

57
Standard Constraint Library 1. Standard Constraint Library: Revolute Joints
• The kinematic constraint equation for two bodies connected through a revolute joint at point P is,
𝐶𝐶(𝑞𝑞, 𝑡𝑡) = 𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃 − 𝑅𝑅𝑗𝑗 − 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃 = 0
Remember that C is 2x1.
In this case q is 6x1 matrix:
𝑞𝑞 = [𝑅𝑅𝑖𝑖 𝜃𝜃𝑖𝑖 𝑅𝑅𝑗𝑗 𝜃𝜃𝑗𝑗]𝑇𝑇 = �𝑅𝑅𝑖𝑖𝑥𝑥 𝑅𝑅𝑖𝑖𝑦𝑦 𝜃𝜃𝑖𝑖 𝑅𝑅𝑗𝑗𝑥𝑥 𝑅𝑅𝑗𝑗𝑦𝑦 𝜃𝜃𝑗𝑗�𝑇𝑇 • Similarly, the Jacobian matrix for this joint
𝐶𝐶𝑞𝑞 =𝜕𝜕𝐶𝐶𝜕𝜕𝑞𝑞
=
⎣⎢⎢⎢⎡𝜕𝜕𝐶𝐶1𝜕𝜕𝑞𝑞𝜕𝜕𝐶𝐶2𝜕𝜕𝑞𝑞 ⎦
⎥⎥⎥⎤
= �
𝜕𝜕𝐶𝐶1𝜕𝜕𝑅𝑅𝑖𝑖
𝜕𝜕𝐶𝐶1𝜕𝜕𝜃𝜃𝑖𝑖
𝜕𝜕𝐶𝐶1𝜕𝜕𝑅𝑅𝑗𝑗
𝜕𝜕𝐶𝐶1𝜕𝜕𝜃𝜃𝑗𝑗
𝜕𝜕𝐶𝐶2𝜕𝜕𝑅𝑅𝑖𝑖
𝜕𝜕𝐶𝐶2𝜕𝜕𝜃𝜃𝑖𝑖
𝜕𝜕𝐶𝐶2𝜕𝜕𝑅𝑅𝑗𝑗
𝜕𝜕𝐶𝐶2𝜕𝜕𝜃𝜃𝑗𝑗
�
Or,
𝐶𝐶𝑞𝑞 = � 𝜕𝜕𝐶𝐶𝜕𝜕𝑅𝑅𝑖𝑖
𝜕𝜕𝐶𝐶𝜕𝜕𝜃𝜃𝑖𝑖
𝜕𝜕𝐶𝐶𝜕𝜕𝑅𝑅𝑗𝑗
𝜕𝜕𝐶𝐶𝜕𝜕𝜃𝜃𝑗𝑗
� = [𝐼𝐼 𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 −𝐼𝐼 −𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃]
where,
I is a 2x2 identity matrix
Aiθ is the partial derivative of Ai
𝐴𝐴𝑖𝑖𝜃𝜃 = �−sin𝜃𝜃𝑖𝑖 − cos𝜃𝜃𝑖𝑖cos 𝜃𝜃𝑖𝑖 −sin𝜃𝜃𝑖𝑖
�
Cq is a 2x6 matrix

58
Velocity Analysis
The velocity analysis is based on,
𝐶𝐶𝑞𝑞�̇�𝑞 = −𝐶𝐶𝑡𝑡
However. Ct=0 (Nothing in C for a revolute joint is an explicit function of time)
Acceleration Analysis
The acceleration analysis is based on,
�̈�𝑞 = 𝐶𝐶𝑞𝑞−1Qd = 𝐶𝐶𝑞𝑞−1 �−�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞 − 2𝐶𝐶𝑞𝑞𝑡𝑡�̇�𝑞 − 𝐶𝐶𝑡𝑡𝑡𝑡�
This matrix does not have any term that is in terms of time explicitly. Therefore,
𝐶𝐶𝑞𝑞𝑡𝑡 = 0
𝐶𝐶𝑡𝑡𝑡𝑡 = 0
Similarly, �̇�𝑞 is not function of q, which means that,
�̇�𝑞𝑞𝑞 = 0
Therefore,
�̈�𝑞 = 𝐶𝐶𝑞𝑞−1Qd = 𝐶𝐶𝑞𝑞−1 �−�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞�
Substituting the Jacobian matrix in the equation above,
�𝐶𝐶𝑞𝑞�̇�𝑞� = [𝐼𝐼 𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 −𝐼𝐼 −𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃]�
�̇�𝑅𝑖𝑖
�̇�𝜃𝑖𝑖
�̇�𝑅𝑗𝑗
�̇�𝜃𝑗𝑗
� = ��̇�𝑅𝑖𝑖 + �̇�𝜃𝑖𝑖𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃−�̇�𝑅𝑗𝑗 − �̇�𝜃𝑗𝑗𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃�
�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞 = �0 −�̇�𝜃𝑖𝑖𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃 0 �̇�𝜃𝑗𝑗𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃�
where, 0 is a 2x2 zero matrix
Qd = −�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞 = −�0 −�̇�𝜃𝑖𝑖𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃 0 �̇�𝜃𝑗𝑗𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃� �
�̇�𝑅𝑖𝑖
�̇�𝜃𝑖𝑖
�̇�𝑅𝑗𝑗
�̇�𝜃𝑗𝑗
� = − �−�̇�𝜃𝑖𝑖2𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃 + �̇�𝜃𝑗𝑗
2𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃�
Qd is a 2x1 matrix

59
Homework Using the standard constraint library, write a program analyzing the motion of a 2R manipulator using standard constraints equations. The system data are:
l2=l3=1m θ2o= θ 3o=0 �̇�𝜃2 = 1 𝑟𝑟𝑟𝑟𝑟𝑟/𝑠𝑠 �̇�𝜃3 = 2𝑡𝑡 𝑟𝑟𝑟𝑟𝑟𝑟/𝑠𝑠 Duration of the simulation is 2 seconds.
Plot motion (displacement, velocity and acceleration of the end of the manipulator) versus time. Compare results with those obtained using a commercial software.

60
2. Standard Constraint Library: Prismatic Joints
θi
Body j
Body i
Pj
Pi
hi Qirij P
• The kinematic constraint equation for two bodies connected through a prismatic joint is,
𝐶𝐶 = �𝐶𝐶1𝐶𝐶2� = �𝜃𝜃
𝑖𝑖 − 𝜃𝜃𝑗𝑗 − 𝑐𝑐ℎ𝑖𝑖𝑇𝑇𝑟𝑟𝑖𝑖𝑗𝑗𝑃𝑃
� = �00�
ℎ𝑖𝑖 = 𝐴𝐴𝑖𝑖ℎ�𝑖𝑖 = 𝐴𝐴𝑖𝑖� 𝑢𝑢�𝑖𝑖𝑃𝑃 − 𝑢𝑢�𝑖𝑖𝑄𝑄�
𝑟𝑟𝑖𝑖𝑗𝑗𝑃𝑃 = 𝑟𝑟𝑖𝑖𝑃𝑃 − 𝑟𝑟𝑗𝑗𝑃𝑃 = �𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃� − �𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃�
• Therefore,
𝐶𝐶 = �𝐶𝐶1𝐶𝐶2� = �
𝜃𝜃𝑖𝑖 − 𝜃𝜃𝑗𝑗 − 𝑐𝑐�ℎ𝑖𝑖�𝑇𝑇𝑟𝑟𝑖𝑖𝑗𝑗𝑃𝑃
� = �𝜃𝜃𝑖𝑖 − 𝜃𝜃𝑗𝑗 − 𝑐𝑐
�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 ��𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃� − �𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃��� = �00�
• The Jacobian matrix is,
𝐶𝐶 = 𝐶𝐶𝑞𝑞 =𝜕𝜕𝐶𝐶𝜕𝜕𝑞𝑞
=
⎣⎢⎢⎢⎡𝜕𝜕𝐶𝐶1𝜕𝜕𝑞𝑞𝜕𝜕𝐶𝐶2𝜕𝜕𝑞𝑞 ⎦
⎥⎥⎥⎤
= �
𝜕𝜕𝐶𝐶1𝜕𝜕𝑅𝑅𝑖𝑖
𝜕𝜕𝐶𝐶1𝜕𝜕𝜃𝜃𝑖𝑖
𝜕𝜕𝐶𝐶1𝜕𝜕𝑅𝑅𝑗𝑗
𝜕𝜕𝐶𝐶1𝜕𝜕𝜃𝜃𝑗𝑗
𝜕𝜕𝐶𝐶2𝜕𝜕𝑅𝑅𝑖𝑖
𝜕𝜕𝐶𝐶2𝜕𝜕𝜃𝜃𝑖𝑖
𝜕𝜕𝐶𝐶2𝜕𝜕𝑅𝑅𝑗𝑗
𝜕𝜕𝐶𝐶2𝜕𝜕𝜃𝜃𝑗𝑗
�
𝐶𝐶𝑞𝑞 = �0 1 0 −1
�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇 �(𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃) − (𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃)� + �𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 −�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 −�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃
�
Velocity analysis The velocity analysis is based on,
𝐶𝐶𝑞𝑞�̇�𝑞 = −𝐶𝐶𝑡𝑡
However. Ct=0 (Nothing in C for a prismatic joint is usually an explicit function of time)

61
Acceleration Analysis
The acceleration analysis is based on,
�̈�𝑞 = 𝐶𝐶𝑞𝑞−1Qd = 𝐶𝐶𝑞𝑞−1 �−�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞 − 2𝐶𝐶𝑞𝑞𝑡𝑡�̇�𝑞 − 𝐶𝐶𝑡𝑡𝑡𝑡�
This matrix does not have any term that is usually in terms of time explicitly. Therefore,
𝐶𝐶𝑞𝑞𝑡𝑡 = 0
𝐶𝐶𝑡𝑡𝑡𝑡 = 0
Therefore,
�̈�𝑞 = 𝐶𝐶𝑞𝑞−1Qd = 𝐶𝐶𝑞𝑞−1 �−�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞�̇�𝑞�
Substituting the Jacobian matrix in the equation above,
�𝐶𝐶𝑞𝑞�̇�𝑞� = �0 1 0 −1
�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇 �(𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃) − (𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃)� + �𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 −�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 −�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃
���̇�𝑅𝑖𝑖�̇�𝜃𝑖𝑖�̇�𝑅𝑗𝑗�̇�𝜃𝑗𝑗�
�𝐶𝐶𝑞𝑞�̇�𝑞� = ��̇�𝜃𝑖𝑖 − �̇�𝜃𝑗𝑗
�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑖𝑖 + �̇�𝜃𝑖𝑖 ��𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇 �(𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃) − (𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃)� + �𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃�−�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�
𝑇𝑇�̇�𝑅𝑗𝑗 − �̇�𝜃𝑗𝑗 �−�𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃��
�𝐶𝐶𝑞𝑞�̇�𝑞�𝑞𝑞 = � 0 0 0 0 𝐶𝐶21 𝐶𝐶22 𝐶𝐶23 𝐶𝐶24
�
where,
𝐶𝐶21 =𝜕𝜕�𝐶𝐶𝑞𝑞�̇�𝑞�𝜕𝜕𝑅𝑅𝑖𝑖
= �̇�𝜃𝑖𝑖 ��𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�
𝐶𝐶22 =𝜕𝜕�𝐶𝐶𝑞𝑞�̇�𝑞�𝜕𝜕𝜃𝜃𝑖𝑖
= �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑖𝑖 + �̇�𝜃𝑖𝑖 ��−𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 �(𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃) − (𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃)� + �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇 �(𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃)�+�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 − �𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃�
−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑗𝑗 − �̇�𝜃𝑗𝑗 �−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃�
𝐶𝐶23 =𝜕𝜕�𝐶𝐶𝑞𝑞�̇�𝑞�𝜕𝜕𝑅𝑅𝑗𝑗
= �̇�𝜃𝑖𝑖 �−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�
𝐶𝐶24 =𝜕𝜕�𝐶𝐶𝑞𝑞�̇�𝑞�𝜕𝜕𝜃𝜃𝑗𝑗
= �̇�𝜃𝑖𝑖�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇 �−(𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃)� − �̇�𝜃𝑗𝑗 ��𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃�

62
�̈�𝑞 = 𝐶𝐶𝑞𝑞−1Qd = 𝐶𝐶𝑞𝑞−1
⎝
⎜⎛−� 0 0 0 0
𝐶𝐶21 𝐶𝐶22 𝐶𝐶23 𝐶𝐶24�
⎩⎪⎨
⎪⎧�̇�𝑅
𝑖𝑖
�̇�𝜃𝑖𝑖
�̇�𝑅𝑗𝑗
�̇�𝜃𝑗𝑗⎭⎪⎬
⎪⎫
⎠
⎟⎞
C22 can be simplified if we remember these characteristics of the transformation matrix that we discussed earlier in this chapter,
𝐴𝐴𝑖𝑖 = �cos𝜃𝜃𝑖𝑖 − sin𝜃𝜃𝑖𝑖sin𝜃𝜃𝑖𝑖 cos 𝜃𝜃𝑖𝑖
�
𝐴𝐴𝑖𝑖𝜃𝜃 = �−sin𝜃𝜃𝑖𝑖 − cos𝜃𝜃𝑖𝑖cos 𝜃𝜃𝑖𝑖 −sin𝜃𝜃𝑖𝑖
�
𝐴𝐴𝑖𝑖𝑇𝑇𝐴𝐴𝑖𝑖 = � cos 𝜃𝜃𝑖𝑖 sin𝜃𝜃𝑖𝑖−sin𝜃𝜃𝑖𝑖 cos𝜃𝜃𝑖𝑖
� �cos 𝜃𝜃𝑖𝑖 − sin𝜃𝜃𝑖𝑖sin𝜃𝜃𝑖𝑖 cos 𝜃𝜃𝑖𝑖
� = 𝐼𝐼
𝐴𝐴𝑖𝑖𝜃𝜃𝑇𝑇𝐴𝐴𝑖𝑖𝜃𝜃 = �−sin𝜃𝜃𝑖𝑖 cos𝜃𝜃𝑖𝑖
−cos𝜃𝜃𝑖𝑖 −sin𝜃𝜃𝑖𝑖� �−sin𝜃𝜃𝑖𝑖 − cos 𝜃𝜃𝑖𝑖
cos 𝜃𝜃𝑖𝑖 −sin𝜃𝜃𝑖𝑖� = 𝐼𝐼
𝐴𝐴𝑖𝑖𝜃𝜃𝑇𝑇𝐴𝐴𝑖𝑖 = �−sin𝜃𝜃𝑖𝑖 cos 𝜃𝜃𝑖𝑖
−cos𝜃𝜃𝑖𝑖 −sin𝜃𝜃𝑖𝑖� �cos 𝜃𝜃𝑖𝑖 − sin𝜃𝜃𝑖𝑖
sin𝜃𝜃𝑖𝑖 cos𝜃𝜃𝑖𝑖� = � 0 1
−1 0�
Therefore,
𝐶𝐶22 = �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑖𝑖 + �̇�𝜃𝑖𝑖 ��−𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 �(𝑅𝑅𝑖𝑖 + 𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃) − (𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃)� + �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇 �(𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃)�+�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 − �𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃�
−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑗𝑗 − �̇�𝜃𝑗𝑗 �−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃� becomes,
𝐶𝐶22 = �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑖𝑖 + �̇�𝜃𝑖𝑖 ��−𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇 �𝑅𝑅𝑖𝑖 − (𝑅𝑅𝑗𝑗 + 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃)� − �ℎ�𝑖𝑖�𝑇𝑇 𝑢𝑢�𝑖𝑖𝑃𝑃 + �ℎ�𝑖𝑖�𝑇𝑇 𝑢𝑢�𝑖𝑖𝑃𝑃+�ℎ�𝑖𝑖�𝑇𝑇 𝑢𝑢�𝑖𝑖𝑃𝑃 − �ℎ�𝑖𝑖�
𝑇𝑇 𝑢𝑢�𝑖𝑖𝑃𝑃�
−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑗𝑗 − �̇�𝜃𝑗𝑗 �−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃�
𝐶𝐶22 = �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�̇�𝑅𝑖𝑖 + �̇�𝜃𝑖𝑖�−𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇(𝑅𝑅𝑖𝑖 − 𝑅𝑅𝑗𝑗 − 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃) − �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇�̇�𝑅𝑗𝑗 − �̇�𝜃𝑗𝑗 �−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃�
𝐶𝐶22 = �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇��̇�𝑅𝑖𝑖 − �̇�𝑅𝑗𝑗� + �̇�𝜃𝑖𝑖�−𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇(𝑅𝑅𝑖𝑖 − 𝑅𝑅𝑗𝑗 − 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃) + �̇�𝜃𝑗𝑗�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃
Homework: Derive the standard constraint equations (position, velocity, and acceleration) of a wheel (j) rolling on the ground (i). Assume that no slippage occurs.

63
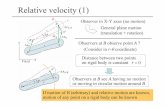
Kinematic Modeling and Analysis of Mechanical Systems
2
3
4
θ2
A θ3
BO X4
Y4
X1
Y1
X2
Y2
X 3
Y 3
h4
The crank-slider mechanism can be represented as a sequence of RRRP joints.
• l2=0.15
• l3=0.35
• No offset
• The frames of links 2 and 3 are placed in the middle of these two links
The local position vectors can be defined as follows:
𝑢𝑢�1𝑂𝑂 = �0.00.0� 𝑢𝑢�2𝑂𝑂 = �−0.075
0.0 �
𝑢𝑢�2𝐴𝐴 = �0.0750.0 � 𝑢𝑢�3𝐴𝐴 = �−0.175
0.0 �
𝑢𝑢�3𝐵𝐵 = �0.1750.0 � 𝑢𝑢�4𝐵𝐵 = �0.0
0.0�
The absolute coordinates of the machines are:
𝑞𝑞 = � 𝑅𝑅1𝑥𝑥 𝑅𝑅1𝑦𝑦 𝜃𝜃1 𝑅𝑅2𝑥𝑥 𝑅𝑅2𝑦𝑦 𝜃𝜃2 𝑅𝑅3𝑥𝑥 𝑅𝑅3𝑦𝑦 𝜃𝜃3 𝑅𝑅4𝑥𝑥 𝑅𝑅4𝑦𝑦 𝜃𝜃4�𝑇𝑇
The input of the machine is,
𝜃𝜃2 = 𝜔𝜔2𝑡𝑡 + 𝜃𝜃𝑜𝑜2

64
Kinematic Constraints:
Since Frame 1 is fixed,
𝑅𝑅1𝑥𝑥 = 𝑅𝑅1𝑦𝑦 = 𝜃𝜃1 = 0
The first three joints are revolute whose constraints equations are:
[𝐼𝐼 𝐴𝐴𝑖𝑖𝜃𝜃 𝑢𝑢�𝑖𝑖𝑃𝑃 −𝐼𝐼 −𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃] = 0
The table below show frames i and j for joints O, A, and B,
Joint Frame i Frame j
O 2 1
A 3 2
B 4 3
The fourth joint is prismatic with the following constraint equations:
�𝜃𝜃𝑖𝑖 − 𝜃𝜃𝑗𝑗 − 𝑐𝑐ℎ𝑖𝑖𝑇𝑇𝑟𝑟𝑖𝑖𝑗𝑗𝑃𝑃
� = �00�
This is a special case (why?). Frames i and j will be 1 and 4 respectively.
c = 0 (why?)
ℎ�4 is unit vector in the local y direction of frame 4.
The above equations become:
�𝜃𝜃4 − 𝜃𝜃1
�𝐴𝐴4 �01��𝑇𝑇��𝑅𝑅1 + 𝐴𝐴1 �10���
� = �00�
�𝜃𝜃4 − 𝜃𝜃1
[sin𝜃𝜃4 cos 𝜃𝜃4]��𝑅𝑅1 + �cos𝜃𝜃1sin𝜃𝜃1
���� = �00�

65
Constraint Matrix Assembly:
Based on the above discussion, the constraint equations are,
𝐶𝐶(𝑞𝑞, 𝑡𝑡) =
⎩⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎧ 𝑅𝑅1𝑥𝑥
𝑅𝑅1𝑦𝑦 𝜃𝜃1
𝑅𝑅1 + 𝐴𝐴1 𝑢𝑢�1𝑂𝑂 − 𝑅𝑅2 − 𝐴𝐴2 𝑢𝑢�2𝑂𝑂𝑅𝑅2 + 𝐴𝐴2 𝑢𝑢�2𝐴𝐴 − 𝑅𝑅3 − 𝐴𝐴3 𝑢𝑢�3𝐴𝐴𝑅𝑅3 + 𝐴𝐴3 𝑢𝑢�3𝐵𝐵 − 𝑅𝑅4 − 𝐴𝐴4 𝑢𝑢�4𝐵𝐵
𝜃𝜃4 − 𝜃𝜃1
[sin𝜃𝜃4 cos 𝜃𝜃4]��𝑅𝑅1 + �cos𝜃𝜃1sin𝜃𝜃1
���
𝜃𝜃2−𝜔𝜔2𝑡𝑡 − 𝜃𝜃𝑜𝑜2 ⎭⎪⎪⎪⎪⎬
⎪⎪⎪⎪⎫
= 0
Jacobian Matrix Assembly:
The Jacobian matrix is,
𝐶𝐶𝑞𝑞
=
⎣⎢⎢⎢⎢⎢⎢⎢⎡
𝐼𝐼(3𝑥𝑥3) 0(3𝑥𝑥9)𝐼𝐼 𝐴𝐴1𝜃𝜃 𝑢𝑢�1𝑂𝑂 −𝐼𝐼 −𝐴𝐴2𝜃𝜃 𝑢𝑢�2𝑂𝑂 0(2𝑥𝑥6)
0 0 𝐼𝐼 𝐴𝐴2𝜃𝜃 𝑢𝑢�2𝐴𝐴 −𝐼𝐼 −𝐴𝐴3𝜃𝜃 𝑢𝑢�3𝐴𝐴 0(2𝑥𝑥3)0 0 0 0 𝐼𝐼 𝐴𝐴3𝜃𝜃 𝑢𝑢�3𝐵𝐵 −𝐼𝐼 −𝐴𝐴4𝜃𝜃 𝑢𝑢�4𝐵𝐵0 0 −1 0 0 0 0 0 0 0 0 1
[sin𝜃𝜃4 cos𝜃𝜃4] (− sin𝜃𝜃4 sin𝜃𝜃1 + cos 𝜃𝜃4 cos 𝜃𝜃1) 0 0 0 0 0 [cos 𝜃𝜃4 −sin𝜃𝜃4]��𝑅𝑅1 + �cos𝜃𝜃1sin𝜃𝜃1
���
0 0 0 0 0 1 0 0 0 0 0 0 ⎦⎥⎥⎥⎥⎥⎥⎥⎤
Use Newton-Raphson to analyze the displacement of the machine

66
Velocity analysis
𝐶𝐶𝑞𝑞�̇�𝑞 = −𝐶𝐶𝑡𝑡
In this case Ct
𝐶𝐶𝑡𝑡 = [0 0 0 0 0 0 0 0 0 0 0 −𝜔𝜔2]𝑇𝑇
Acceleration Analysis The first three joints are revolute whose Qd equations are:
Qd = −�
0
−�̇�𝜃𝑖𝑖2𝐴𝐴𝑖𝑖 𝑢𝑢�𝑖𝑖𝑃𝑃0
�̇�𝜃𝑗𝑗2𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃
�
The fourth joint is prismatic with the following Qd equations
Qd = − � 0 0 0 0 𝐶𝐶21 𝐶𝐶22 𝐶𝐶23 𝐶𝐶24
�
⎩⎪⎨
⎪⎧�̇�𝑅
𝑖𝑖
�̇�𝜃𝑖𝑖
�̇�𝑅𝑗𝑗
�̇�𝜃𝑗𝑗⎭⎪⎬
⎪⎫
Frames i and j will be 1 and 4 respectively. The above equations become:
Qd = −� 0 0 0 0 𝐶𝐶21 𝐶𝐶22 𝐶𝐶23 𝐶𝐶24
�
⎩⎪⎨
⎪⎧�̇�𝑅
4
�̇�𝜃4
�̇�𝑅1
�̇�𝜃1⎭⎪⎬
⎪⎫
𝐶𝐶21 = �̇�𝜃𝑖𝑖 ��𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�
𝐶𝐶22 = �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇��̇�𝑅𝑖𝑖 − �̇�𝑅𝑗𝑗� + �̇�𝜃𝑖𝑖�−𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�𝑇𝑇�𝑅𝑅𝑖𝑖 − 𝑅𝑅𝑗𝑗 − 𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃� + �̇�𝜃𝑗𝑗�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃
𝐶𝐶23 = �̇�𝜃𝑖𝑖 �−�𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�
𝐶𝐶24 = �̇�𝜃𝑖𝑖 �𝐴𝐴𝑖𝑖𝜃𝜃ℎ�𝑖𝑖�𝑇𝑇�−�𝐴𝐴𝑗𝑗𝜃𝜃 𝑢𝑢�𝑗𝑗𝑃𝑃�� − �̇�𝜃𝑗𝑗 ��𝐴𝐴𝑖𝑖ℎ�𝑖𝑖�
𝑇𝑇𝐴𝐴𝑗𝑗 𝑢𝑢�𝑗𝑗𝑃𝑃�
Substituting the matrices we used earlier
𝐶𝐶21 = �̇�𝜃4 ���−sin𝜃𝜃4 − cos 𝜃𝜃4cos 𝜃𝜃4 − sin𝜃𝜃4
� �0.01.0��
𝑇𝑇� = �̇�𝜃4[− cos 𝜃𝜃4 − sin𝜃𝜃4]
𝐶𝐶22 = 0
𝐶𝐶23 = �̇�𝜃1 �− ��−sin𝜃𝜃4 − cos𝜃𝜃4cos𝜃𝜃4 −sin𝜃𝜃4
� �0.01.0��
𝑇𝑇� = 0
𝐶𝐶24 = 0

67
Matlab Program for Kinematic Analysis of a Crank-Slider Mechanism close all clear all % Analysis of a Crank-Slider Mechanism Using Newton Raphson's Method r2=0.15; %crank r3=0.35; %coupler theta1=0; %fixed link angle %Initial Guess theta20=30; theta30=348; R2x0=(r2/2)*cosd(theta20); R2y0=(r2/2)*sind(theta20); R3x0=(r2)*cosd(theta20)+(r3/2)*cosd(theta30); R3y0=(r2)*sind(theta20)+(r3/2)*sind(theta30); R4x0=(r2)*cosd(theta20)+(r3)*cosd(theta30); R4y0=0; theta40=0; %input parameters t(1)=0; dt=0.001; %seconds omega2=150; % input velocity (rad/s) imax=44; %number of time steps converge=0; epsilon1=0.001; %dtheta accuracy epsilon2=0.001; %C accuracy %Define the local position vectors u1O=[0;0]; u2O=[-0.075;0]; u2A=[0.075;0]; u3A=[-0.175;0]; u3B=[0.175;0]; u4B=[0;0]; i=1; while i<=imax t(i)=(i)*dt; theta2(i)=theta20+omega2*t(i)*(180/pi); %adjust initial conditions based on the step # if i==1 R2x(i)=R2x0; R2y(i)=R2y0;

68
theta2(i)=theta20; R3x(i)=R3x0; R3y(i)=R3y0; theta3(i)=theta30; R4x(i)=R4x0; R4y(i)=R4y0; theta4(i)=theta40; else R2x(i)=R2x(i-1); R2y(i)=R2y(i-1); theta2(i)=theta2(i-1); R3x(i)=R3x(i-1); R3y(i)=R3y(i-1); theta3(i)=theta3(i-1); R4x(i)=R4x(i-1); R4y(i)=R4y(i-1); theta4(i)=theta4(i-1); end; %Newton Raphson for Position Analysis while converge==0 %Transformation Matrix A2=[cosd(theta2(i)),-sind(theta2(i));sind(theta2(i)),cosd(theta2(i))]; A3=[cosd(theta3(i)),-sind(theta3(i));sind(theta3(i)),cosd(theta3(i))]; %Prepare Constraint Matrix %We are eliminating the first three which correspond to the fixed frame C12=[R2x(i);R2y(i)]+A2*u2O; C34=[R2x(i);R2y(i)]+A2*u2A-[R3x(i);R3y(i)]-A3*u3A; C56=[R3x(i);R3y(i)]+A3*u3B-[R4x(i);0]; C(1:2,1)=C12(1:2,1); C(3:4,1)=C34(1:2,1); C(5:6,1)=C56(1:2,1); C(7,1)=theta4(i); C(8,1)=R4y(i); C(9,1)=theta2(i)-omega2*t(i)*(180/pi)-theta20; %Jacobian Matrix %We are eliminating the first three which correspond to the fixed frame Cq=zeros(9,9); Cq(1,1)=1; Cq(1,3)=(r2/2)*sind(theta2(i)); Cq(2,2)=1; Cq(2,3)=-(r2/2)*cosd(theta2(i)); Cq(3,1)=1; Cq(3,3)=-(r2/2)*sind(theta2(i)); Cq(3,4)=-1; Cq(3,6)=-(r3/2)*sind(theta3(i)); Cq(4,2)=1; Cq(4,3)=(r2/2)*cosd(theta2(i)); Cq(4,5)=-1; Cq(4,6)=(r3/2)*cosd(theta3(i)); Cq(5,4)=1; Cq(5,6)=-(r3/2)*sind(theta3(i)); Cq(5,7)=-1;

69
Cq(6,5)=1; Cq(6,6)=(r3/2)*cosd(theta3(i)); Cq(6,8)=-1; Cq(7,9)=1; Cq(8,8)=1; Cq(9,3)=1; dq=-inv(Cq)*C; %update thetas R2x(i)=R2x(i)+dq(1); R2y(i)=R2y(i)+dq(2); theta2(i)=theta2(i)+dq(3); R3x(i)=R3x(i)+dq(4); R3y(i)=R3y(i)+dq(5); theta3(i)=theta3(i)+dq(6); R4x(i)=R4x(i)+dq(7); R4y(i)=R4y(i)+dq(8); theta4(i)=theta4(i)+dq(9); %Termination Criteria if sum(abs(dq))<epsilon1 | sum(abs(C))<epsilon2 converge=1; i=i+1; end; end; converge=0; end; for i=1:imax %velocity Analysis Ct=[0;0;0;0;0;0;0;0;-omega2]; Cq=zeros(9,9); Cq(1,1)=1; Cq(1,3)=(r2/2)*sind(theta2(i)); Cq(2,2)=1; Cq(2,3)=-(r2/2)*cosd(theta2(i)); Cq(3,1)=1; Cq(3,3)=-(r2/2)*sind(theta2(i)); Cq(3,4)=-1; Cq(3,6)=-(r3/2)*sind(theta3(i)); Cq(4,2)=1; Cq(4,3)=(r2/2)*cosd(theta2(i)); Cq(4,5)=-1; Cq(4,6)=(r3/2)*cosd(theta3(i)); Cq(5,4)=1; Cq(5,6)=-(r3/2)*sind(theta3(i)); Cq(5,7)=-1; Cq(6,5)=1; Cq(6,6)=(r3/2)*cosd(theta3(i)); Cq(6,8)=-1; Cq(7,9)=1; Cq(8,8)=1; Cq(9,3)=1;

70
vq=-inv(Cq)*Ct; R2xd(i)=vq(1,1); R2yd(i)=vq(2,1); theta2d(i)=vq(3,1); R3xd(i)=vq(4,1); R3yd(i)=vq(5,1); theta3d(i)=vq(6,1); R4xd(i)=vq(7,1); R4yd(i)=vq(8,1); theta4d(i)=vq(9,1); %Acceleration Analysis %Transformation Matrices A2=[cosd(theta2(i)),-sind(theta2(i));sind(theta2(i)),cosd(theta2(i))]; A3=[cosd(theta3(i)),-sind(theta3(i));sind(theta3(i)),cosd(theta3(i))]; A4=[cosd(theta4(i)),-sind(theta4(i));sind(theta4(i)),cosd(theta4(i))]; A4t=[-sind(theta4(i)),-cosd(theta4(i));cosd(theta4(i)),-sind(theta4(i))]; %Prepare joint Qd matrices for the revolute joints Qd12=theta2d(i)^2*A2*u2O; Qd34=theta2d(i)^2*A2*u2A-theta3d(i)^2*A3*u3A; Qd56=theta3d(i)^2*A3*u3B; Qd(1:2,1)=Qd12(1:2,1); Qd(3:4,1)=Qd34(1:2,1); Qd(5:6,1)=Qd56(1:2,1); %Prepare joint Qd matrices for the prismatic joint C21=transpose(theta4d(i)*A4t*[0;1]); C22=0; C23=[0,0]; C24=0; Qd78=-[zeros(1,6);[C21(1),C21(2),C22,C23(1),C23(2),C24]]*... [R4xd(i);R4yd(i);theta4d(i);0;0;0]; %Last row corresponds to the degree of freedom Qd(9,1)=0; aq=inv(Cq)*Qd; R2xdd(i)=aq(1,1); R2ydd(i)=aq(2,1); theta2dd(i)=aq(3,1); R3xdd(i)=aq(4,1); R3ydd(i)=aq(5,1); theta3dd(i)=aq(6,1); R4xdd(i)=aq(7,1); R4ydd(i)=aq(8,1); theta4add(i)=aq(9,1); end; % Calculate joints xa=r2*cosd(theta2); ya=r2*sind(theta2); xb=r2*cosd(theta2)+r3*cosd(theta3); yb=r2*sind(theta2)+r3*sind(theta3);

71
plot(xa,ya,'r','LineWidth',2); hold on; plot(xb,yb,'g','LineWidth',2); legend ('Crank','Output Link') axis([-0.3 0.3 -0.3 0.3]) axis equal grid on %plot the links figure for i=1:imax %Generate the links at every instant x(1,i)=0; y(1,i)=0; x(2,i)=xa(i); y(2,i)=ya(i); x(3,i)=xb(i); y(3,i)=yb(i); plot(x(1:3,i),y(1:3,i)) hold on end; axis([-0.3 0.3 -0.3 0.3]) title ('motion of the links') axis equal grid on %plot angular velocities figure plot(t,theta2d,'-',t,theta3d,'--','LineWidth',2) legend('omega_2','omega_3','Location','SouthWest') title ('Angular velocities of the two links') xlabel('Time (s)') ylabel('rad/s') grid on %plot velocity of the Block figure plot(t,R4xd,'-','LineWidth',2) legend('Velocity of the Block','Location','NorthWest') xlabel('Time (s)') ylabel('m/s') grid on %plot angular accelerations figure plot(t,theta2dd,'-',t,theta3dd,'--','LineWidth',2) legend('alpha_2','alpha_3','Location','SouthWest') title ('Angular accelerations of the two links') xlabel('Time (s)') ylabel('rad/s^2') grid on %plot acceleration of the Block figure plot(t,R4xdd,'-','LineWidth',2)

72
legend('Acceleration of the Block','Location','SouthWest') xlabel('Time (s)') ylabel('m/s^2') grid on

73
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.3
-0.2
-0.1
0
0.1
0.2
Crank
Output Link
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.3
-0.2
-0.1
0
0.1
0.2
motion of the links

74
Time (s)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
rad/
s
-100
-50
0
50
100
150Angular velocities of the two links
omega2
omega3
Time (s)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
m/s
-25
-20
-15
-10
-5
0
5
10
15
20
25
Velocity of the Block

75
Time (s)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
rad/
s2
10 4
-1.5
-1
-0.5
0
0.5
1
1.5Angular accelerations of the two links
alpha2
alpha3
Time (s)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
m/s
2
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
Acceleration of the Block

76
Effect of Accuracy ε1 and ε2 ε1 = ε2 = 1
ε1 = ε2 = 0.01
ε1 = ε2 = 0.0001
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.3
-0.2
-0.1
0
0.1
0.2
Crank
Output Link
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.3
-0.2
-0.1
0
0.1
0.2
Crank
Output Link
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.3
-0.2
-0.1
0
0.1
0.2
Crank
Output Link

77
Homework Problem 3.21
Additionally derive relevant velocity and acceleration matrices. Simulate the motion for these data: 1. Body 2 is 1 meter long 2. Body 2 rotate at constant angular velocity of 1 rpm 3. τ is a constant velocity of 0.5 m/s (outward). 4. Body 2 starts horizontally 5. Body 3 starts at the middle of Body 2 (0.5 m away from the hinge) 6. Simulate the motion for 1 second Bonus: Implement condition in your code to eliminate Body 3 if it is outside Body 2.