
Comportamento Dinâmico de Sistemas de Segunda Ordem · ζ – fator de amortecimento:...
72
Comportamento Dinâmico de Sistemas de Segunda Ordem Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 1 / 72
Transcript of Comportamento Dinâmico de Sistemas de Segunda Ordem · ζ – fator de amortecimento:...
Comportamento Dinâmico de Sistemas de SegundaOrdem
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 1 / 72
Roteiro1 Sistemas de Segunda Ordem
Função de Transferência de Sistemas de Segunda Ordem2 Resposta Transiente de Sistemas de Segunda Ordem
Resposta ao DegrauResposta OscilatóriaResposta Criticamente AmortecidaResposta Não-Oscilatória
Resposta ao ImpulsoResposta OscilatóriaResposta Criticamente AmortecidaResposta Não-Oscilatória
Resposta Senoidal3 Exemplos
ManômetroDois Reatores CSTR IsotérmicosInteração Térmica
4 Atividades Complementares
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 2 / 72
Sistemas de Segunda Ordem
Sistema de Segunda Ordem (ou retardo quadrático) é aquele cuja re-sposta y(t) é descrita por uma equação diferencial de segunda ordem:
a2d2ydt2 + a1
dydt
+ a0y = bu, y(0) = y ′(0) = 0
Se a0 6= 0, então
a2
a0
d2ydt2 +
a1
a0
dydt
+ y =ba0
u, y(0) = y ′(0) = 0
Fazendoa2
a0= τ2
p ,a1
a0= 2ζτp e
ba0
= Kp
tem-se
τp2 d2y
dt2 + 2 ζ τpdydt
+ y = Kp u, y(0) = y ′(0) = 0
que é a forma padrão de representar um sistema de segunda ordem,
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 3 / 72
Sistemas de Segunda Ordemcontinuação
ondeτp – tempo característico ou período natural de oscilação: indica arapidez (ou equivalentemente o tempo de resposta) com que aresposta do sistema reage a uma perturbação em uma certaentradaζ – fator de amortecimento: adimensional, é uma medida do graude amortecimento (ou do caráter oscilatório) da resposta dosistema; isto é, o grau de oscilação na resposta após umaperturbação em alguma variável de entradaKp – ganho do processo: é a razão entre os valores finais daresposta e de uma determinada entrada considerada
Kp =∆y∆u
(degrau em u), ou
Kp = lims→0
[Gp(s)]
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 4 / 72
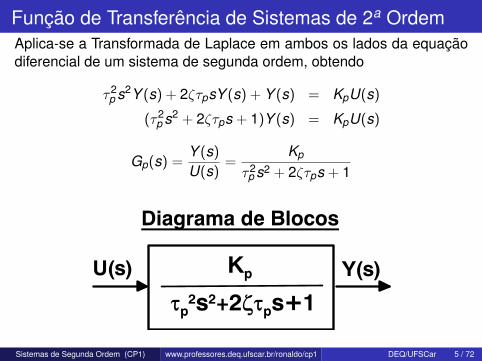
Função de Transferência de Sistemas de 2a OrdemAplica-se a Transformada de Laplace em ambos os lados da equaçãodiferencial de um sistema de segunda ordem, obtendo
τ2p s2Y (s) + 2ζτpsY (s) + Y (s) = KpU(s)
(τ2p s2 + 2ζτps + 1)Y (s) = KpU(s)
Gp(s) =Y (s)
U(s)=
Kp
τ2p s2 + 2ζτps + 1
t p 2 s 2 + 2 z t p s + 1K pU ( s ) Y ( s )
D i a g r a m a d e B l o c o s
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 5 / 72
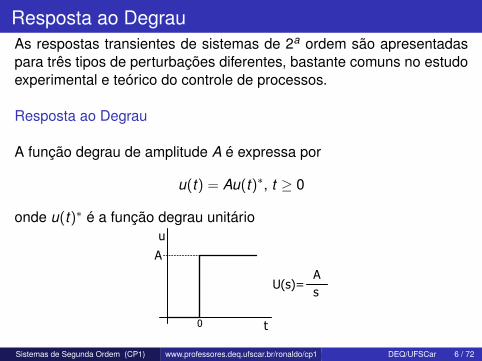
Resposta ao DegrauAs respostas transientes de sistemas de 2a ordem são apresentadaspara três tipos de perturbações diferentes, bastante comuns no estudoexperimental e teórico do controle de processos.
Resposta ao Degrau
A função degrau de amplitude A é expressa por
u(t) = Au(t)∗, t ≥ 0
onde u(t)∗ é a função degrau unitário
0
u
t
AU ( s ) = A
s
Figura: Perturbação degrauSistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 6 / 72
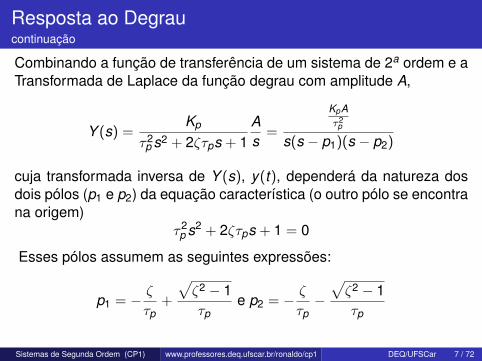
Resposta ao Degraucontinuação
Combinando a função de transferência de um sistema de 2a ordem e aTransformada de Laplace da função degrau com amplitude A,
Y (s) =Kp
τ2p s2 + 2ζτps + 1
As
=
KpAτ2
p
s(s − p1)(s − p2)
cuja transformada inversa de Y (s), y(t), dependerá da natureza dosdois pólos (p1 e p2) da equação característica (o outro pólo se encontrana origem)
τ2p s2 + 2ζτps + 1 = 0
Esses pólos assumem as seguintes expressões:
p1 = − ζ
τp+
√ζ2 − 1τp
e p2 = − ζ
τp−√
ζ2 − 1τp
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 7 / 72
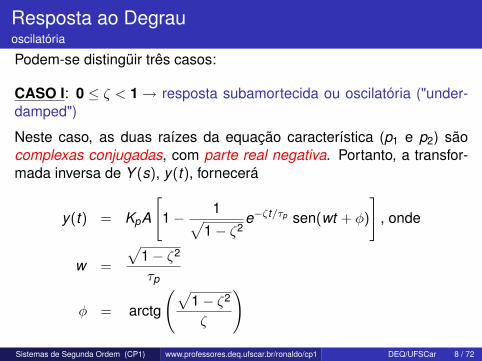
Resposta ao Degrauoscilatória
Podem-se distingüir três casos:
CASO I: 0 ≤ ζ < 1 → resposta subamortecida ou oscilatória ("under-damped")
Neste caso, as duas raízes da equação característica (p1 e p2) sãocomplexas conjugadas, com parte real negativa. Portanto, a transfor-mada inversa de Y (s), y(t), fornecerá
y(t) = KpA
[1− 1√
1− ζ2e−ζt/τp sen(wt + φ)
], onde
w =
√1− ζ2
τp
φ = arctg
(√1− ζ2
ζ
)Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 8 / 72
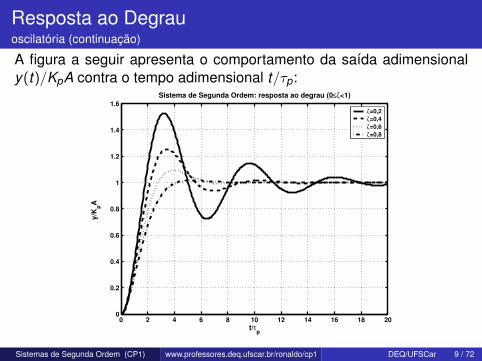
Resposta ao Degrauoscilatória (continuação)
A figura a seguir apresenta o comportamento da saída adimensionaly(t)/KpA contra o tempo adimensional t/τp:
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Sistema de Segunda Ordem: resposta ao degrau (0≤ζ<1)
t/τp
y/K
pA
ζ=0,2
ζ=0,4
ζ=0,6
ζ=0,8
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 9 / 72
Resposta ao Degrauoscilatória (continuação)
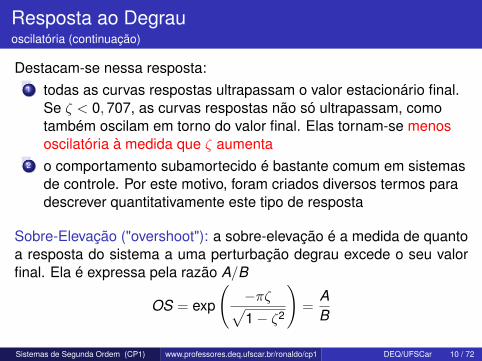
Destacam-se nessa resposta:1 todas as curvas respostas ultrapassam o valor estacionário final.
Se ζ < 0, 707, as curvas respostas não só ultrapassam, comotambém oscilam em torno do valor final. Elas tornam-se menososcilatória à medida que ζ aumenta
2 o comportamento subamortecido é bastante comum em sistemasde controle. Por este motivo, foram criados diversos termos paradescrever quantitativamente este tipo de resposta
Sobre-Elevação ("overshoot"): a sobre-elevação é a medida de quantoa resposta do sistema a uma perturbação degrau excede o seu valorfinal. Ela é expressa pela razão A/B
OS = exp
(−πζ√1− ζ2
)=
AB
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 10 / 72
Resposta ao Degrauoscilatória (continuação)
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Sistema de Segunda Ordem: resposta ao degrau (0≤ζ<1)
t/τp
y/K
pA
A
B
C
T
tr t
s
±5%
tmáx
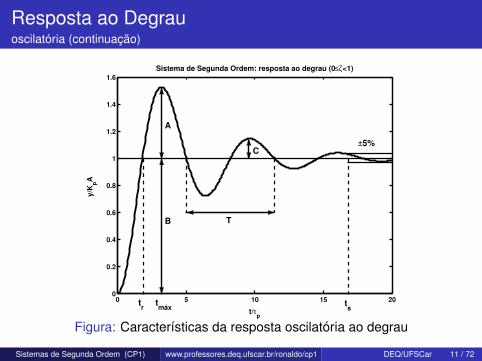
Figura: Características da resposta oscilatória ao degrau
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 11 / 72
Resposta ao Degrauoscilatória (continuação)
Tempo do Primeiro Máximo: o instante do pico correspondente aoprimeiro máximo; isto é, para se alcançar a sobre-elevação
tmáx =πτp√1− ζ2
Razão de Declínio ("decay ratio"): a razão de declínio, C/A, é a razãoentre as alturas de dois picos sucessivos. Ela se relaciona com ζ pelaexpressão
DR = exp
(−2πζ√1− ζ2
)=
CA
= (OS)2
Em sistemas de segunda ordem, a DR é constante para par sucessivode picos. Um ζ maior significa um amortecimento maior e, portanto,um declínio maior.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 12 / 72
Resposta ao Degrauoscilatória (continuação)
Tempo de Ascensão: esse é o tempo que a resposta leva para alcançarpela primeira vez o seu valor final. Observe que tr aumenta com oaumento de ζ:
tr =τp√
1− ζ2arctg
(−√
1− ζ2
ζ
)
ou aproximadamente 1/4 de τp.
Tempo de Resposta: esse é o tempo que a resposta leva para alcançaruma faixa de ±5% do seu valor final e nela permanecer. Para 0 < ζ <0, 9, o tempo de acomodação correspondendo a faixa de ±5% é dado,aproximadamente, por
ts =3τp
ζ
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 13 / 72
Resposta ao Degrauoscilatória (continuação)
Caso seja utilizado o critério de ±2%, então ts é dado por, aproximada-mente,
ts =4τp
ζ
Período de Oscilação: a freqüência, em radianos (radianos/tempo), daoscilação de uma resposta subamortecida é dada por
w =
√1− ζ2
τp
Desta forma, a freqüência, em ciclos/tempo, é igual a
f =w2π
=
√1− ζ2
2πτp
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 14 / 72
Resposta ao Degrauoscilatória (continuação)
Segue-se que, o período de oscilação (tempo/ciclo) é o inverso de f
T =1f
=2πτp√1− ζ2
e corresponde ao tempo decorrido para se completar um ciclo (ou otempo entre dois picos).
Período Natural de Oscilação: se o amortecimento é eliminado (ζ = 0),o sistema oscila continuamente, sem atenuação, com amplitude con-stante. Nestas condições naturais, ou não amortecidas, a freqüênciaem radianos (radianos/tempo) é conhecida como freqüência natural deoscilação, wn
wn =1τp
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 15 / 72
Resposta ao Degrauoscilatória (continuação)
Desta forma, a freqüência cíclica natural, em ciclos/tempo, é igual a
fn =wn
2π=
12πτp
E o período natural de oscilação (tempo/ciclo) é igual a
Tn =1fn
= 2πτp
O efeito do amortecimento é reduzir a freqüência a um valor inferiora freqüência natural. No entanto, para valores de amortecimento 0 <ζ < 0, 5, a freqüência é somente um pouco menor do que a freqüêncianatural e a diferença entre as duas, mesmo para ζ > 0, 5, está em tornode 13%.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 16 / 72
Resposta ao Degraucriticamente amortecida
CASO II: ζ = 1 → resposta criticamente amortecida
Neste caso, as duas raízes da equação característica (p1 e p2) sãoiguais (raíz dupla) – p1 = p2 = −ζ/τp, com parte real negativa. Por-tanto, a transformada inversa de Y (s), y(t), fornecerá
y(t) = KpA[1−
(1 +
tτp
)e−t/τp
]
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 17 / 72
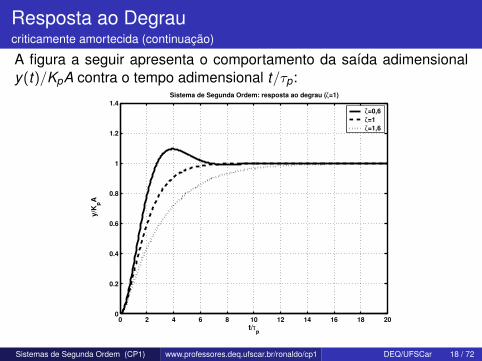
Resposta ao Degraucriticamente amortecida (continuação)
A figura a seguir apresenta o comportamento da saída adimensionaly(t)/KpA contra o tempo adimensional t/τp:
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
Sistema de Segunda Ordem: resposta ao degrau (ζ=1)
t/τp
y/K
pA
ζ=0,6
ζ=1
ζ=1,6
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 18 / 72
Resposta ao Degraucriticamente amortecida
A resposta para ζ = 1 permite a aproximação mais rápida e não-oscilatória do seu valor final, semelhante a um sistema de 1a ordem.Essa condição é chamada de amortecimento crítico e conhecida comoresposta criticamente amortecida.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 19 / 72
Resposta ao Degraunão-oscilatória
CASO III: ζ > 1 → resposta superamortecida ou não-oscilatória("overdamped")
Neste caso, as duas raízes da equação característica (p1 e p2)são reais e negativas. A transformada inversa de Y (s), y(t), fornecerá
y(t) = KpA{
1− e−ζt/τp
[cosh
(√ζ2 − 1
tτp
)+
ζ√ζ2 − 1
senh(√
ζ2 − 1tτp
)]}Uma expressão alternativa para y(t) é
y(t) = KpA[1− 1
τp1 − τp2
(τp1e−t/τp1 − τp2e−t/τp2
)], onde
τp1 =(ζ +
√ζ2 − 1
)τp e τp2 =
(ζ −
√ζ2 − 1
)τp
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 20 / 72
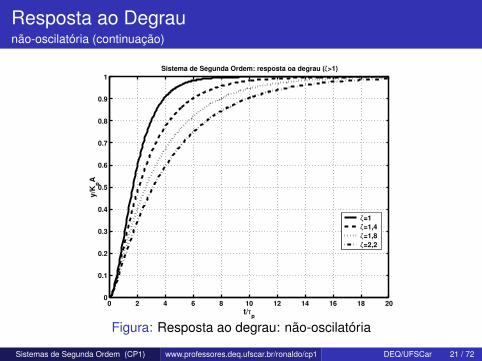
Resposta ao Degraunão-oscilatória (continuação)
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sistema de Segunda Ordem: resposta oa degrau (ζ>1)
t/τp
y/K
pA
ζ=1
ζ=1,4
ζ=1,8
ζ=2,2
Figura: Resposta ao degrau: não-oscilatória
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 21 / 72
Resposta ao Degraunão-oscilatória (continuação)
Algumas observações sobre a resposta não-oscilatória:
o sistema de segunda ordem pode ser considerado como oproduto de dois sistemas de 1a ordem, com constantes de tempoτp1 e τp2 distintasobserve que a resposta é não-oscilatória, não ultrapassa o valorfinal (sem sobre-elevação) e se torna mais morosa à medida queζ aumenta
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 22 / 72
Resposta ao Degrau
Observações Finais:
para os três casos da resposta ao degrau, ela se aproximaassintoticamente de seu valor final, KpA, analogamente ao casoda resposta ao degrau de um sistema de 1a ordem:
∆y∆u
= Kp ⇒ y(t →∞) → KpA
entretanto, a inclinação das curvas respostas, na origem, é zero,diferentemente ao observado para um sistema de 1a ordem
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 23 / 72
Resposta ao Impulso
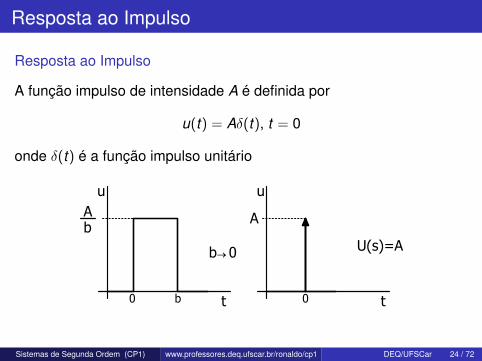
Resposta ao Impulso
A função impulso de intensidade A é definida por
u(t) = Aδ(t), t = 0
onde δ(t) é a função impulso unitário
0
u
t
AU ( s ) = A
b
b
0
u
t
Ab ® 0
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 24 / 72
Resposta ao Impulsocontinuação
A resposta impulsional de um sistema de segunda ordem, perturbadopor um impulso de intensidade A, pode ser expressa por:
Y (s) =Kp
τ2p s2 + 2ζτps + 1
A =
KpAτ2
p
(s − p1)(s − p2)
cuja transformada inversa de Y (s), y(t), dependerá da natureza dosdois pólos (p1 e p2) da equação característica
τ2p s2 + 2ζτps + 1 = 0
Esses pólos assumem as seguintes expressões:
p1 = − ζ
τp+
√ζ2 − 1τp
e p2 = − ζ
τp−√
ζ2 − 1τp
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 25 / 72
Resposta ao Impulsooscilatória
Podem-se distingüir três casos:
CASO I: 0 ≤ ζ < 1 → resposta subamortecida ou oscilatória ("under-damped")
As duas raízes da equação característica (p1 e p2) são complexas con-jugadas, com parte real negativa. Portanto, a transformada inversa deY (s), y(t), fornecerá
y(t) =KpAτp
1√1− ζ2
e−ζt/τp sen(√
1− ζ2 tτp
)
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 26 / 72
Resposta ao Impulsocriticamente amortecida
CASO II: ζ = 1 → resposta criticamente amortecida
Neste caso, as duas raízes da equação característica (p1 e p2) sãoiguais (raíz dupla) – p1 = p2 = −ζ/τp, com parte real negativa. Por-tanto, a transformada inversa de Y (s), y(t), fornecerá
y(t) =KpAτ2
pte−t/τp
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 27 / 72
Resposta ao Impulsonão-oscilatória
CASO III: ζ > 1 → resposta superamortecida ou não-oscilatória("overdamped")
Neste caso, as duas raízes da equação característica (p1 e p2)são reais e negativas. A transformada inversa de Y (s), y(t), fornecerá
y(t) =KpAτp
1√ζ2 − 1
e−ζt/τp senh(√
ζ2 − 1tτp
)
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 28 / 72
Resposta ao Impulsocontinuação
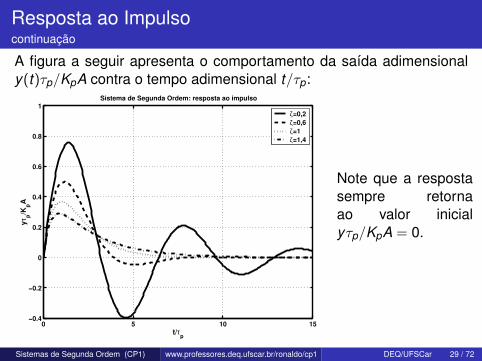
A figura a seguir apresenta o comportamento da saída adimensionaly(t)τp/KpA contra o tempo adimensional t/τp:
0 5 10 15−0.4
−0.2
0
0.2
0.4
0.6
0.8
1Sistema de Segunda Ordem: resposta ao impulso
t/τp
yτ p
/KpA
ζ=0,2
ζ=0,6
ζ=1
ζ=1,4
Note que a respostasempre retornaao valor inicialyτp/KpA = 0.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 29 / 72
Resposta Senoidal
Resposta Senoidal
Se a função perturbação é senoidal
u(t) = A sen(wt), t ≥ 0
onde A é a amplitude e w é a freqüência angular (igual a 2πf ,f=freqüência em ciclos por tempo).
A Transformada de Laplace de u(t) é
U(s) =Aw
s2 + w2
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 30 / 72
Resposta Senoidalcontinuação
A resposta transformada, Y (s), será igual a
Y (s) =Kp
τ2p s2 + 2ζτps + 1
Aws2 + w2
As raízes do denominador de Y (s) são iguais a:
p1 = − ζ
τp+
√ζ2 − 1τp
e p2 = − ζ
τp−√
ζ2 − 1τp
p3 = ıw e p4 = −ıw
O comportamento da resposta y(t) dependerá da natureza dos pólosdo sistema.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 31 / 72
Resposta Senoidalcontinuação
Para o caso de um sistema subamortecido (0 ≤ ζ < 1), o par de raízescomplexas conjugadas (p1 e p2) e o par de raízes puramente imag-inárias (p3 e p4) resultarão na expansão em frações parciais de Y (s),conforme a seguinte expressão
Y (s) =A1
s − ıw+
A2
s + ıw+
A3
s −(− ζ
τp+
√ζ2−1τp
) +A4
s −(− ζ
τp−√
ζ2−1τp
)cuja transformada inversa y(t) será
y(t) = A1 cos(wt) + A2 sen(wt)+
e−ζt/τp
[A3 cos
(√1− ζ2 t
τp
)+ A4 sen
(√1− ζ2 t
τp
)]Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 32 / 72
Resposta Senoidalcontinuação
Note que para t →∞, o termo contendo e−ζt/τp tende a zero,
y(t) = A1 cos(wt) + A2 sen(wt)+
e−ζt/τp︸ ︷︷ ︸→0
[A3 cos
(√1− ζ2 t
τp
)+ A4 sen
(√1− ζ2 t
τp
)]
restando apenas a solução periódica final, algumas vezes chamada desolução estacionária
y(t)|s = A1 cos(wt) + A2 sen(wt)
Esta solução periódica final também é observada para quando ζ ≥ 1.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 33 / 72
Resposta Senoidalcontinuação
Após calcular as constantes A1 e A2,
y(t)|s =KpA√[
1− τ2p w2
]2+ (2ζτpw)2
sen(wt + φ)
φ = arctg
[2ζτpw
1− (τ2p w2)
]
Pode-se verificar as seguintes características da resposta senoidal:1 a resposta é também uma onda senoidal com freqüência w igual
à onda senoidal do sinal de entrada
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 34 / 72
Resposta Senoidalcontinuação
2 a razão entre as amplitudes da resposta (solução estacionária) eda entrada – chamada de razão de amplitude, AR,
AR =
KpAq[1−τ2
p w2]2+(2ζτpw)2
A=
Kp√[1− τ2
p w2]2
+ (2ζτpw)2
A razão de amplitude normalizada, ARN ,
ARN =ARKp
=1√[
1− τ2p w2
]2+ (2ζτpw)2
pode ser maior ou menor do que 1, dependendo de ζ e τpw3 a resposta atrasa em relação à entrada por um ângulo de fase,|φ|. Pode-se verificar que |φ| tende assintoticamente para 180o àmedida que w aumenta
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 35 / 72
Manômetro
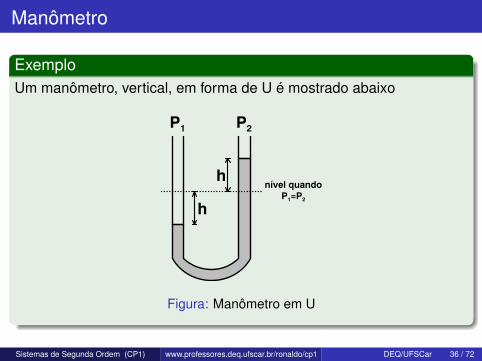
ExemploUm manômetro, vertical, em forma de U é mostrado abaixo
hh
P 1 P 2
n í v e l q u a n d oP 1 = P 2
Figura: Manômetro em U
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 36 / 72
Manômetro
Exemplo (continuação)O aumento da diferença de pressão imediatamente resulta em umdesequilíbrio de forças no líquido, provocando a sua aceleração. Issoé impedido pela resistência oferecida ao fluido pela parede interna dotubo e pelo peso da coluna de fluido.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 37 / 72
Manômetro
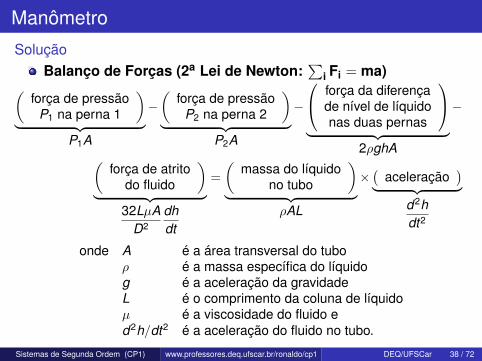
SoluçãoBalanço de Forças (2a Lei de Newton:
∑i Fi = ma)(
força de pressãoP1 na perna 1
)︸ ︷︷ ︸
P1A
−(
força de pressãoP2 na perna 2
)︸ ︷︷ ︸
P2A
−
força da diferençade nível de líquidonas duas pernas
︸ ︷︷ ︸
2ρghA
−
(força de atrito
do fluido
)︸ ︷︷ ︸
32LµAD2
dhdt
=
(massa do líquido
no tubo
)︸ ︷︷ ︸
ρAL
×(
aceleração)︸ ︷︷ ︸
d2hdt2
onde A é a área transversal do tuboρ é a massa específica do líquidog é a aceleração da gravidadeL é o comprimento da coluna de líquidoµ é a viscosidade do fluido ed2h/dt2 é a aceleração do fluido no tubo.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 38 / 72
Manômetrocontinuação
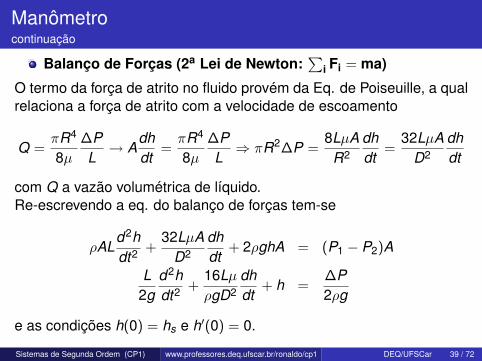
Balanço de Forças (2a Lei de Newton:∑
i Fi = ma)
O termo da força de atrito no fluido provém da Eq. de Poiseuille, a qualrelaciona a força de atrito com a velocidade de escoamento
Q =πR4
8µ
∆PL→ A
dhdt
=πR4
8µ
∆PL⇒ πR2∆P =
8LµAR2
dhdt
=32LµA
D2dhdt
com Q a vazão volumétrica de líquido.Re-escrevendo a eq. do balanço de forças tem-se
ρALd2hdt2 +
32LµAD2
dhdt
+ 2ρghA = (P1 − P2)A
L2g
d2hdt2 +
16Lµ
ρgD2dhdt
+ h =∆P2ρg
e as condições h(0) = hs e h′(0) = 0.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 39 / 72
Manômetrocontinuação
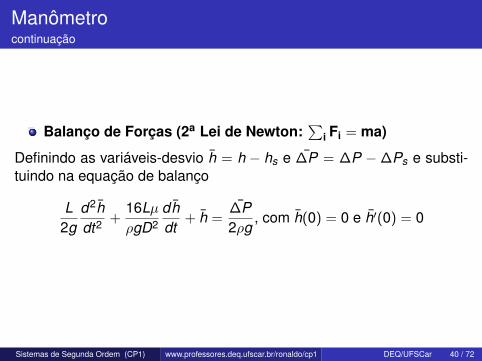
Balanço de Forças (2a Lei de Newton:∑
i Fi = ma)
Definindo as variáveis-desvio h̄ = h − hs e ∆̄P = ∆P −∆Ps e substi-tuindo na equação de balanço
L2g
d2h̄dt2 +
16Lµ
ρgD2dh̄dt
+ h̄ =∆̄P2ρg
, com h̄(0) = 0 e h̄′(0) = 0
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 40 / 72
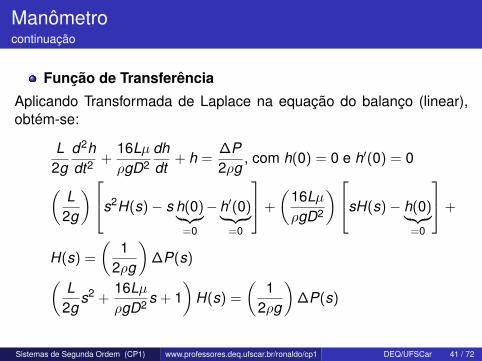
Manômetrocontinuação
Função de Transferência
Aplicando Transformada de Laplace na equação do balanço (linear),obtém-se:
L2g
d2hdt2 +
16Lµ
ρgD2dhdt
+ h =∆P2ρg
, com h(0) = 0 e h′(0) = 0
(L
2g
)s2H(s)− s h(0)︸︷︷︸=0
−h′(0)︸ ︷︷ ︸=0
+
(16Lµ
ρgD2
)sH(s)− h(0)︸︷︷︸=0
+
H(s) =
(1
2ρg
)∆P(s)(
L2g
s2 +16Lµ
ρgD2 s + 1)
H(s) =
(1
2ρg
)∆P(s)
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 41 / 72
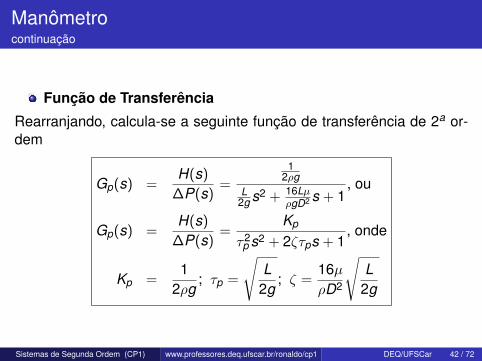
Manômetrocontinuação
Função de Transferência
Rearranjando, calcula-se a seguinte função de transferência de 2a or-dem
Gp(s) =H(s)
∆P(s)=
12ρg
L2g s2 + 16Lµ
ρgD2 s + 1, ou
Gp(s) =H(s)
∆P(s)=
Kp
τ2p s2 + 2ζτps + 1
, onde
Kp =1
2ρg; τp =
√L
2g; ζ =
16µ
ρD2
√L
2g
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 42 / 72
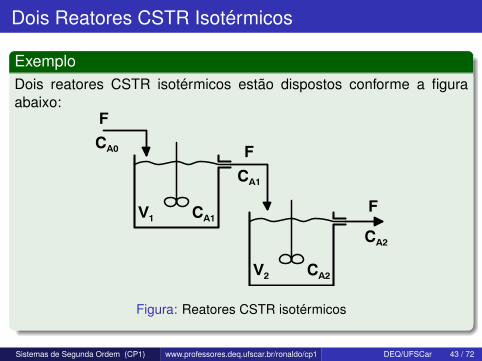
Dois Reatores CSTR Isotérmicos
ExemploDois reatores CSTR isotérmicos estão dispostos conforme a figuraabaixo:
F
FC A 0
C A 1
V 1 C A 1FC A 2
V 2 C A 2
Figura: Reatores CSTR isotérmicos
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 43 / 72
Dois Reatores CSTR Isotérmicos
Exemplo (continuação)Os conteúdos de líquido (volumes) nos dois reatores sãoconsiderados constantes e iguais a V1 = V2 = 1, 05 m3. As reaçõesquímicas que neles ocorrem são do tipo A → B, de 1a ordem, comrA = kCA e k = 0, 040 min−1. O calor de reação é desprezível, bemcomo as perdas de calor para o ambiente. As condições dealimentação no 1o reator são F = 0, 085 m3/min e CA0 = 0, 925mol/m3.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 44 / 72
Dois Reatores CSTR Isotérmicos
Exemplo (continuação)Deste modo,
1 determine a função de transferência entre CA2(s)/CA0(s)
2 considere uma perturbação degrau em CA0 de amplitude∆CA0 = 0, 925 mol/m3
3 por questão de segurança, a concentração de reagente nosegundo reator não deve ultrapassar o valor de 0,85 mol/m3. Paraevitar que isso ocorra, um alarme será tocado no momento emque a concentração do reagente atingir 0,80 mol/m3. Essasituação chegará a acontecer? Se sim, estime o tempo decorridoapós a perturbação até esse momento.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 45 / 72
Dois Reatores CSTR Isotérmicos
SoluçãoBalanço de Massa do Componente A: volumes dos reatoressão constantes
reator 1:dmA1
dt= FCA0 − FCA1 − V1rA1, com mA1 = V1CA1
V1dCA1
dt= FCA0 − FCA1 − V1rA1
dCA1
dt=
FV1
(CA0 − CA1)− rA1
reator 2:dmA2
dt= FCA1 − FCA2 − V2rA2, com mA2 = V2CA2
V2dCA2
dt= FCA1 − FCA2 − V2rA2
dCA2
dt=
FV2
(CA1 − CA2)− rA2
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 46 / 72
Dois Reatores CSTR Isotérmicoscontinuação
Equações Auxiliares: cinética de reatores
rA1 = kCA1
rA2 = kCA2
Modelo Não-Linear: espaço de estados
reator 1:dCA1
dt=
FV1
(CA0 − CA1)− kCA1, CA1(0) = CA1s
reator 2:dCA2
dt=
FV2
(CA1 − CA2)− kCA2, CA2(0) = CA2s
este modelo não apresenta termos não-lineares.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 47 / 72
Dois Reatores CSTR Isotérmicoscontinuação
Modelo Linear: variável-desvio
C̄A0 = CA0 − CA0s
C̄A1 = CA1 − CA1s
C̄A2 = CA2 − CA2s
as equações anteriores formam o modelo linear, onde asvariáveis CA0, CA1 e CA2 são variáveis-desvio.
Função de Transferência CA2(s)/CA0(s)
CA2(s)
CA0(s)=
CA1(s)
CA0(s)
CA2(s)
CA1(s)
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 48 / 72
Dois Reatores CSTR Isotérmicoscontinuação
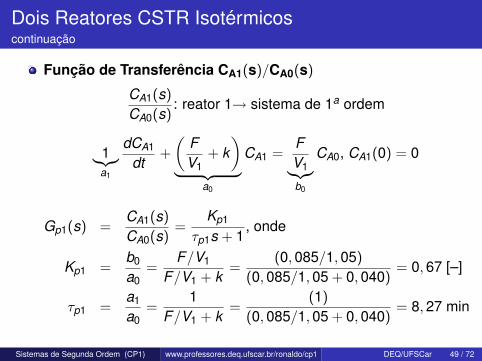
Função de Transferência CA1(s)/CA0(s)
CA1(s)
CA0(s): reator 1→ sistema de 1a ordem
1︸︷︷︸a1
dCA1
dt+
(FV1
+ k)
︸ ︷︷ ︸a0
CA1 =FV1︸︷︷︸b0
CA0, CA1(0) = 0
Gp1(s) =CA1(s)
CA0(s)=
Kp1
τp1s + 1, onde
Kp1 =b0
a0=
F/V1
F/V1 + k=
(0, 085/1, 05)
(0, 085/1, 05 + 0, 040)= 0, 67 [–]
τp1 =a1
a0=
1F/V1 + k
=(1)
(0, 085/1, 05 + 0, 040)= 8, 27 min
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 49 / 72
Dois Reatores CSTR Isotérmicoscontinuação
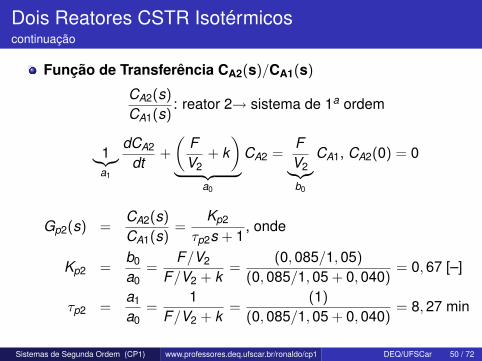
Função de Transferência CA2(s)/CA1(s)
CA2(s)
CA1(s): reator 2→ sistema de 1a ordem
1︸︷︷︸a1
dCA2
dt+
(FV2
+ k)
︸ ︷︷ ︸a0
CA2 =FV2︸︷︷︸b0
CA1, CA2(0) = 0
Gp2(s) =CA2(s)
CA1(s)=
Kp2
τp2s + 1, onde
Kp2 =b0
a0=
F/V2
F/V2 + k=
(0, 085/1, 05)
(0, 085/1, 05 + 0, 040)= 0, 67 [–]
τp2 =a1
a0=
1F/V2 + k
=(1)
(0, 085/1, 05 + 0, 040)= 8, 27 min
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 50 / 72
Dois Reatores CSTR Isotérmicoscontinuação
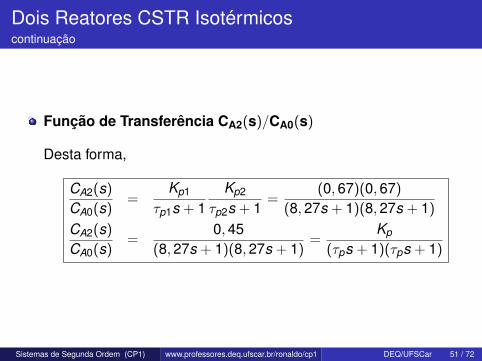
Função de Transferência CA2(s)/CA0(s)
Desta forma,
CA2(s)
CA0(s)=
Kp1
τp1s + 1Kp2
τp2s + 1=
(0, 67)(0, 67)
(8, 27s + 1)(8, 27s + 1)
CA2(s)
CA0(s)=
0, 45(8, 27s + 1)(8, 27s + 1)
=Kp
(τps + 1)(τps + 1)
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 51 / 72
Dois Reatores CSTR Isotérmicoscontinuação
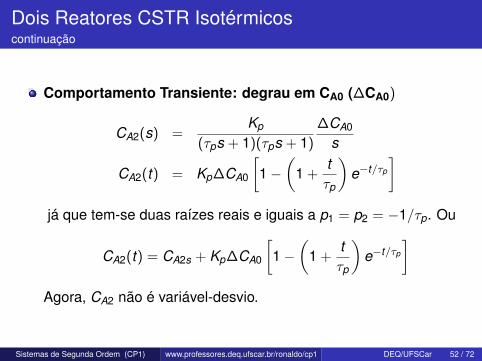
Comportamento Transiente: degrau em CA0 (∆CA0)
CA2(s) =Kp
(τps + 1)(τps + 1)
∆CA0
s
CA2(t) = Kp∆CA0
[1−
(1 +
tτp
)e−t/τp
]já que tem-se duas raízes reais e iguais a p1 = p2 = −1/τp. Ou
CA2(t) = CA2s + Kp∆CA0
[1−
(1 +
tτp
)e−t/τp
]Agora, CA2 não é variável-desvio.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 52 / 72
Dois Reatores CSTR Isotérmicoscontinuação
a condição de CA2 = 0, 80 mol/m3 será alcançada após odegrau?cálculo de CA2s: no estado estacionário
reator 1:(
FV1
+ k)
CA1s =FV1
CA0s
CA1s =F/V1
F/V1 + kCA0s =
(0, 085/1, 05)
(0, 085/1, 05 + 0, 040)(0, 925)
CA1s = 0, 62 mol/m3
reator 2:(
FV2
+ k)
CA2s =FV2
CA1s
CA2s =F/V2
F/V2 + kCA1s =
(0, 085/1, 05)
(0, 085/1, 05 + 0, 040)(0, 62)
CA2s = 0, 42 mol/m3
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 53 / 72
Dois Reatores CSTR Isotérmicoscontinuação
a condição de CA2 = 0, 80 mol/m3 será alcançada após odegrau?cálculo de CA2(∞): valor final (t→∞)
CA2(∞) = CA2s + Kp∆CA0 = (0, 42) + (0, 45)(0, 925)CA2(∞) = 0, 84 mol/m3 > 0, 80 mol/m3
em algum momento, o valor de CA2 para o acionamento do alarme será alcançado!
quando este valor limite será alcançado, após o degrau?
CA2(t) = CA2s + Kp∆CA0
[1−
(1 +
tτp
)e−t/τp
]para t = talarme e CA2 = CA2alarme
CA2alarme(talarme)−CA2s = Kp∆CA0
[1−
(1 +
talarme
τp
)e−talarme/τp
]Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 54 / 72
Dois Reatores CSTR Isotérmicoscontinuação
a condição de CA2 = 0, 80 mol/m3 será alcançada após odegrau?
Esta equação algébrica não-linear em talarme deve ser resolvida apartir de (f (x) = 0)
0, 420, 80− 0, 42
[1−
(1 +
talarme
8, 27
)e−talarme/8,27
]− 1 = 0
obtendo-se talarme = 32, 67 min .
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 55 / 72
Interação Térmica
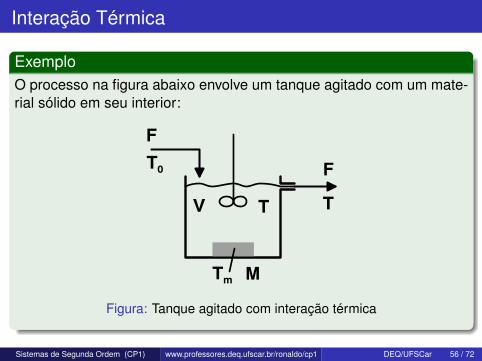
ExemploO processo na figura abaixo envolve um tanque agitado com um mate-rial sólido em seu interior:
F
FT 0
TV T
T m M
Figura: Tanque agitado com interação térmica
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 56 / 72
Interação Térmica
Exemplo (continuação)As considerações para o sistema são: (i). o tanque é perfeitamenteagitado; (ii). as propriedades físicas são constantes; (iii). V e F sãoconstantes; (vi). o material sólido contribui significativamente com oarmazenamento de energia, sendo a temperatura dele uniforme; (v). ocalor transferido do líquido para o metal é UA(T − Tm); (vi). perdas decalor são desprezíveis e (vii). todas as variáveis estão inicialmente noestado estacionário. Dados: V = 2 m3; F = 1 m3/h; ρCp = 1000kcal/m3.oC; MCpm = 2000 kcal/oC; UA = 1000 kcal/h.oC.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 57 / 72
Interação Térmica
Exemplo (continuação)As equações do modelo dinâmico do processo são as seguintes:
BE – tanque : ρCpVdTdt
= ρCpF (T0 − T )−Q, T (0) = Ts
BE – sólido : MCpmdTm
dt= Q, Tm(0) = Tms
eq. auxiliar : Q = UA(T − Tm)
1 obtenha a função de transferência entre T (s) e T0(s).2 calcule a constante de tempo e o ganho do processo.3 verifique se o sistema é estável ou instável e oscilatório ou
não-oscilatório, justificando a sua resposta.4 descreva , sucintamente, como os resultados obtidos nos itens (b)
e (c) são afetados quando UA →∞. Analise o significado físicodesta situação.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 58 / 72
Interação Térmica
Solução
Balanço de Energia Total: tanque com volume constantes
ρCpVdTdt
= ρCpFT0 − ρCpFT −Q, com T (0) = Ts
dTdt
=FV
(T0 − T )− QρCpV
Balanço de Energia Total: sólido com parâmetrosconcentrados
MCpmdTm
dt= Q, com Tm(0) = Tms
dTm
dt=
QMCpm
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 59 / 72
Interação Térmicacontinuação
Equação Auxiliar: transferência de calor
Q = UA(T − Tm)
Modelo Não-Linear: espaço de estados
tanque:dTdt
=FV
(T0 − T )− UA(T − Tm)
ρCpV, T (0) = Ts
sólido:dTm
dt=
UA(T − Tm)
MCpm, Tm(0) = Tms
este modelo não apresenta termos não-lineares.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 60 / 72
Interação Térmicacontinuação
Modelo Linear: variável-desvio
T̄0 = T0 − T0s
T̄ = T − Ts
T̄m = Tm − Tms
as equações anteriores formam o modelo linear, onde T0, T e Tm sãovariáveis-desvio.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 61 / 72
Interação Térmicacontinuação
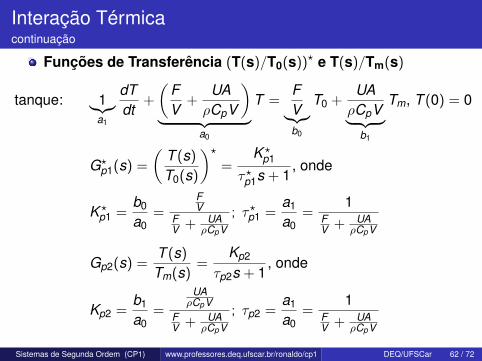
Funções de Transferência (T(s)/T0(s))? e T(s)/Tm(s)
tanque: 1︸︷︷︸a1
dTdt
+
(FV
+UA
ρCpV
)︸ ︷︷ ︸
a0
T =FV︸︷︷︸b0
T0 +UA
ρCpV︸ ︷︷ ︸b1
Tm, T (0) = 0
G?p1(s) =
(T (s)
T0(s)
)?
=K ?
p1
τ?p1s + 1
, onde
K ?p1 =
b0
a0=
FV
FV + UA
ρCpV
; τ?p1 =
a1
a0=
1FV + UA
ρCpV
Gp2(s) =T (s)
Tm(s)=
Kp2
τp2s + 1, onde
Kp2 =b1
a0=
UAρCpV
FV + UA
ρCpV
; τp2 =a1
a0=
1FV + UA
ρCpV
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 62 / 72
Interação Térmicacontinuação
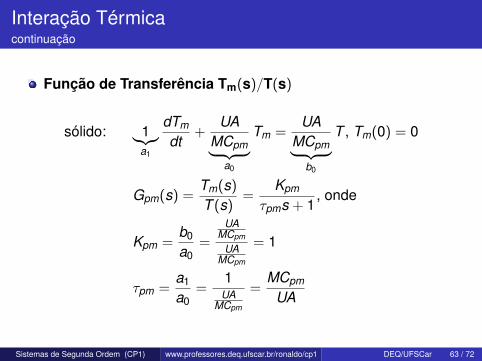
Função de Transferência Tm(s)/T(s)
sólido: 1︸︷︷︸a1
dTm
dt+
UAMCpm︸ ︷︷ ︸
a0
Tm =UA
MCpm︸ ︷︷ ︸b0
T , Tm(0) = 0
Gpm(s) =Tm(s)
T (s)=
Kpm
τpms + 1, onde
Kpm =b0
a0=
UAMCpm
UAMCpm
= 1
τpm =a1
a0=
1UA
MCpm
=MCpm
UA
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 63 / 72
Interação Térmicacontinuação
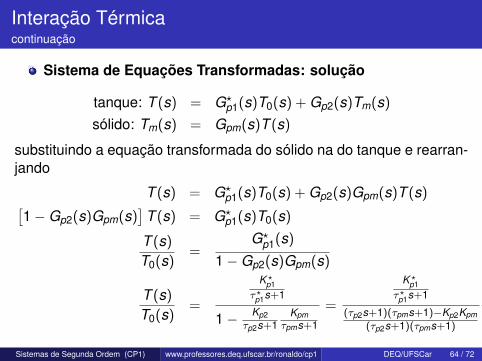
Sistema de Equações Transformadas: solução
tanque: T (s) = G?p1(s)T0(s) + Gp2(s)Tm(s)
sólido: Tm(s) = Gpm(s)T (s)
substituindo a equação transformada do sólido na do tanque e rearran-jando
T (s) = G?p1(s)T0(s) + Gp2(s)Gpm(s)T (s)[
1−Gp2(s)Gpm(s)]
T (s) = G?p1(s)T0(s)
T (s)
T0(s)=
G?p1(s)
1−Gp2(s)Gpm(s)
T (s)
T0(s)=
K ?p1
τ?p1s+1
1− Kp2τp2s+1
Kpmτpms+1
=
K ?p1
τ?p1s+1
(τp2s+1)(τpms+1)−Kp2Kpm(τp2s+1)(τpms+1)
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 64 / 72
Interação Térmicacontinuação
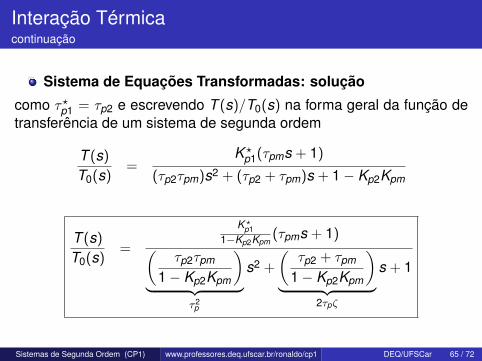
Sistema de Equações Transformadas: solução
como τ?p1 = τp2 e escrevendo T (s)/T0(s) na forma geral da função de
transferência de um sistema de segunda ordem
T (s)
T0(s)=
K ?p1(τpms + 1)
(τp2τpm)s2 + (τp2 + τpm)s + 1− Kp2Kpm
T (s)
T0(s)=
K ?p1
1−Kp2Kpm(τpms + 1)(
τp2τpm
1− Kp2Kpm
)︸ ︷︷ ︸
τ2p
s2 +
(τp2 + τpm
1− Kp2Kpm
)︸ ︷︷ ︸
2τpζ
s + 1
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 65 / 72
Interação Térmicacontinuação
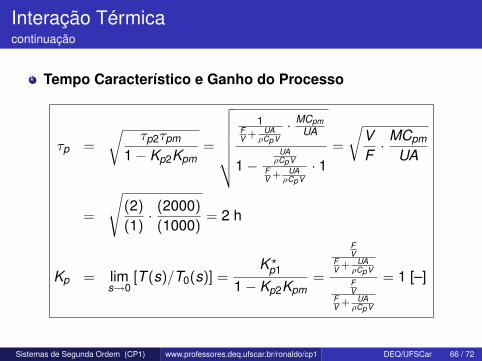
Tempo Característico e Ganho do Processo
τp =
√τp2τpm
1− Kp2Kpm=
√√√√√√√1
FV + UA
ρCpV· MCpm
UA
1−UA
ρCpVFV + UA
ρCpV· 1
=
√VF·
MCpm
UA
=
√(2)
(1)· (2000)
(1000)= 2 h
Kp = lims→0
[T (s)/T0(s)] =K ?
p1
1− Kp2Kpm=
FV
FV + UA
ρCpV
FV
FV + UA
ρCpV
= 1 [–]
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 66 / 72
Interação Térmicacontinuação
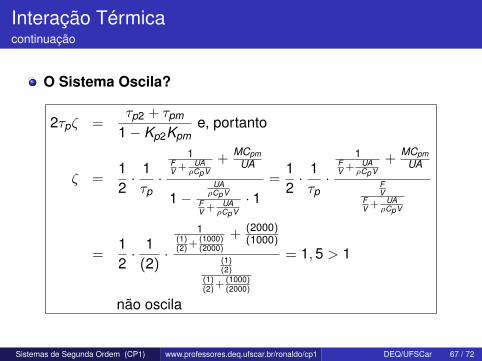
O Sistema Oscila?
2τpζ =τp2 + τpm
1− Kp2Kpme, portanto
ζ =12· 1τp·
1FV + UA
ρCpV+
MCpmUA
1−UA
ρCpVFV + UA
ρCpV· 1
=12· 1τp·
1FV + UA
ρCpV+
MCpmUA
FV
FV + UA
ρCpV
=12· 1(2)
·
1(1)(2)
+ (1000)(2000)
+ (2000)(1000)
(1)(2)
(1)(2)
+ (1000)(2000)
= 1, 5 > 1
não oscila
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 67 / 72
Interação Térmicacontinuação
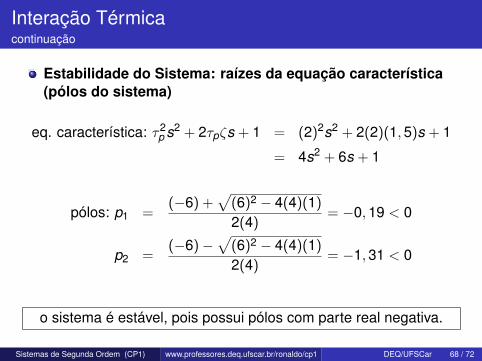
Estabilidade do Sistema: raízes da equação característica(pólos do sistema)
eq. característica: τ2p s2 + 2τpζs + 1 = (2)2s2 + 2(2)(1, 5)s + 1
= 4s2 + 6s + 1
pólos: p1 =(−6) +
√(6)2 − 4(4)(1)
2(4)= −0, 19 < 0
p2 =(−6)−
√(6)2 − 4(4)(1)
2(4)= −1, 31 < 0
o sistema é estável, pois possui pólos com parte real negativa.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 68 / 72
Interação Térmicacontinuação
Comportamento do Sistema Quando UA →∞
quando UA →∞:
τpm =MCpm
UA→ 0
Kp =K ?
p1
1− Kp2Kpm=
FV
FV + UA
ρCpV
1−UA
ρCpVFV + UA
ρCpV
=
FV
FV + UA
ρCpV
FV
FV + UA
ρCpV
= 1 [–]
τ2p =
τp2τpm
1− Kp2Kpm→ 0
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 69 / 72
Interação Térmicacontinuação
Comportamento do Sistema Quando UA →∞
quando UA →∞:
2τpζ =τp2 + τpm
1− Kp2Kpm=
τp2
1− Kp2=
1FV + UA
ρCpV
1−UA
ρCpVFV + UA
ρCpV
=
1FV + UA
ρCpV
FV
FV + UA
ρCpV
=VF
=
=(2)
(1)→ 2 h
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 70 / 72
Interação Térmicacontinuação
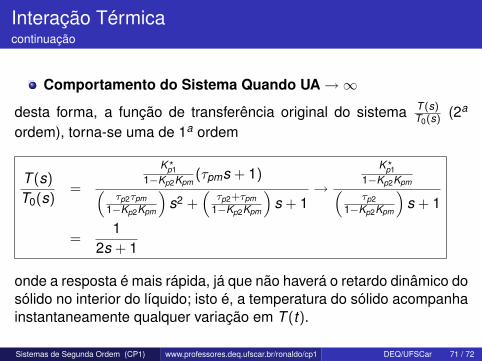
Comportamento do Sistema Quando UA →∞
desta forma, a função de transferência original do sistema T (s)T0(s) (2a
ordem), torna-se uma de 1a ordem
T (s)
T0(s)=
K ?p1
1−Kp2Kpm(τpms + 1)(
τp2τpm1−Kp2Kpm
)s2 +
(τp2+τpm
1−Kp2Kpm
)s + 1
→K ?
p11−Kp2Kpm(τp2
1−Kp2Kpm
)s + 1
=1
2s + 1
onde a resposta é mais rápida, já que não haverá o retardo dinâmico dosólido no interior do líquido; isto é, a temperatura do sólido acompanhainstantaneamente qualquer variação em T (t).
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 71 / 72
Leitura I
Leitura Complementar
Próxima aula:
apostila do Prof. Wua, capítulo 12 e 13 (volume II).
livro do Stephanopoulosb, capítulos 12 e 13.
livro do Seborg et al.c , capítulos 6 e 8.
aKwong, W. H., Introdução ao Controle de Processos Químicos com MATLAB.Volumes I e II, EdUFSCar, São Carlos, Brasil, 2002.
bStephanopoulos, G., Chemical Process Control. An Introduction to Theory andPractice. Prentice Hall, Englewood Cliffs, USA, 1984.
cSeborg, D. E., Edgar, T. F., Mellichamp, D. A., Process Dynamics and Control. 1st
Edition, John Wiley, New York, USA, 1989.
Sistemas de Segunda Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 72 / 72


















