Complexity of Maximum Solution - thi.uni-hannover.de fileComplexity of Maximum Solution:...
46
Complexity of Maximum Solution: Max-Ones(Γ) Generalised to Larger Domains Peter Jonsson, Fredrik Kuivinen, Gustav Nordh Linköping University, Sweden
Transcript of Complexity of Maximum Solution - thi.uni-hannover.de fileComplexity of Maximum Solution:...

Complexity of Maximum Solution:Max-Ones(Γ) Generalised to Larger Domains
Peter Jonsson, Fredrik Kuivinen, Gustav NordhLinköping University, Sweden
The Maximum Solution Problem: Max-Sol(Γ)
Input: CSP(Γ) (domain D ⊆ N) instance I on variables VObjective: Find a solution s to I such that∑
v∈V
s(v)
is maximised.
The Maximum Solution Problem: Max-Sol(Γ)
Input: CSP(Γ) (domain D ⊆ N) instance I on variables V and aweight function w : V → NObjective: Find a solution s to I such that∑
v∈V
w(v) · s(v)
is maximised.
The Maximum Solution Problem: Max-Sol(Γ)
Input: CSP(Γ) (domain D ⊆ N) instance I on variables V and aweight function w : V → NObjective: Find a solution s to I such that∑
v∈V
w(v) · s(v)
is maximised.
Example
(x + y ≤ 1) over D = {0, 1} with w(x) = 2, w(y) = 1 have theoptimal solution s(x) = 1, s(y) = 0
The Maximum Solution Problem: Max-Sol(Γ)
Input: CSP(Γ) (domain D ⊆ N) instance I on variables V and aweight function w : V → NObjective: Find a solution s to I such that∑
v∈V
w(v) · s(v)
is maximised.
Example
(x + y ≤ 1) over D = {0, 1} with w(x) = 2, w(y) = 1 have theoptimal solution s(x) = 1, s(y) = 0
Example
R¬x∨¬y = {(0, 0), (0, 1), (1, 0)}Max-Sol(R¬x∨¬y ) is Maximum Independent Set.
The Maximum Solution Problem: Max-Sol(Γ)
Input: CSP(Γ) (domain D ⊆ N) instance I on variables V and aweight function w : V → NObjective: Find a solution s to I such that∑
v∈V
w(v) · s(v)
is maximised.Max-Sol(Γ) over D = {0, 1} is called Max-Ones(Γ)
The complexity of Max-Ones(Γ) is known for all Γ [Khanna,Sudan, Trevisan, Williamson 00]
Our goal is to classify the complexity of Max-Sol(Γ) for all Γ
Motivation: (Bounded) Integer Linear Programming(B-ILP)
Input: matrix A, a vector of variables x = (x1, . . . , xn)t , a
column vector b and a sequence of numbers c1, . . . , cn.Objective: Maximise
n∑i=1
cixi
subject to Ax ≤ b, xi ’s non-negative integers ≤ B.
ΓLIN : Linear inequalities over D = {0, . . . , B}Max-Sol(ΓLIN ) is very close to B-ILP.
Motivation: (Bounded) Integer Linear Programming(B-ILP)
Input: matrix A, a vector of variables x = (x1, . . . , xn)t , a
column vector b and a sequence of numbers c1, . . . , cn.Objective: Maximise
n∑i=1
cixi
subject to Ax ≤ b, xi ’s non-negative integers ≤ B.
ΓLIN : Linear inequalities over D = {0, . . . , B}Max-Sol(ΓLIN ) is very close to B-ILP.
Outline
The complexity of Max-Sol(Γ) is determined by Pol(Γ)The complexity of Max-Ones(Γ) revisitedTractable class for Max-Sol(Γ)Γ expressed by Regular Signed LogicMaximal constraint languages
Complexity classes for optimisation problems
A is an r -approximate algorithm for a (maximisation)problem if
OPT(I)A(I)
≤ r
PO: Optimal solutions in polynomial timeAPX: Polynomial time r -approximate algorithm for someconstant r ≥ 1poly-APX Polynomial time r -approximate algorithm forsome r ≤ p(|I|)Hardness/completeness for (poly-)APX is defined in termsof approximation preserving reductions.
Algebraic approach to Max-Sol(Γ)
TheoremIf Γ1 ⊆ 〈Γ2〉, then there is an approximation preservingreduction from Max-Sol(Γ1) to Max-Sol(Γ2).
Given an instance I of Max-Sol(Γ1):R1(x , . . . , y) ≡ ∃zR2(x , . . . , z) ∧ · · · ∧ R2(x , . . . , y) ∧ (x = y)
Eliminate existential quantifiers by introducing freshvariables of weight 0Eliminate x = y by replacing y by x and adding w(y) tow(x)
For the resulting instance I′ of Max-Sol(Γ2) we have
OPT(I) = OPT(I′)For any solution s′ to I′ we can find in polynomial time asolution s to I such that Value(s) = Value(s′).
Algebraic approach to Max-Sol(Γ)
TheoremIf Γ1 ⊆ 〈Γ2〉, then there is an approximation preservingreduction from Max-Sol(Γ1) to Max-Sol(Γ2).
Given an instance I of Max-Sol(Γ1):R1(x , . . . , y) ≡ ∃zR2(x , . . . , z) ∧ · · · ∧ R2(x , . . . , y) ∧ (x = y)
Eliminate existential quantifiers by introducing freshvariables of weight 0Eliminate x = y by replacing y by x and adding w(y) tow(x)
For the resulting instance I′ of Max-Sol(Γ2) we have
OPT(I) = OPT(I′)For any solution s′ to I′ we can find in polynomial time asolution s to I such that Value(s) = Value(s′).
Algebraic approach to Max-Sol(Γ)
TheoremIf Γ1 ⊆ 〈Γ2〉, then there is an approximation preservingreduction from Max-Sol(Γ1) to Max-Sol(Γ2).
Given an instance I of Max-Sol(Γ1):R1(x , . . . , y) ≡ ∃zR2(x , . . . , z) ∧ · · · ∧ R2(x , . . . , y) ∧ (x = y)
Eliminate existential quantifiers by introducing freshvariables of weight 0Eliminate x = y by replacing y by x and adding w(y) tow(x)
For the resulting instance I′ of Max-Sol(Γ2) we haveOPT(I) = OPT(I′)For any solution s′ to I′ we can find in polynomial time asolution s to I such that Value(s) = Value(s′).
Algebraic approach to Max-Sol(Γ)
TheoremIf Γ1 ⊆ 〈Γ2〉, then there is an S-reduction from Max-Sol(Γ1) toMax-Sol(Γ2).
Corollary
If Pol(Γ1) = Pol(Γ2) then Max-Sol(Γ1) is in PO (APX-complete,poly-APX-complete) iff Max-Sol(Γ2) is in PO (APX-complete,poly-APX-complete)
ObservationIf Pol(Γ1) = Pol(Γ2) and Max-Sol(Γ1) is in APX andapproximable within a but NP-hard to approximate within b thenMax-Sol(Γ2) is approximable within a but NP-hard toapproximate within b.
Algebraic approach to Max-Sol(Γ)
TheoremIf Γ1 ⊆ 〈Γ2〉, then there is an S-reduction from Max-Sol(Γ1) toMax-Sol(Γ2).
Corollary
If Pol(Γ1) = Pol(Γ2) then Max-Sol(Γ1) is in PO (APX-complete,poly-APX-complete) iff Max-Sol(Γ2) is in PO (APX-complete,poly-APX-complete)
ObservationIf Pol(Γ1) = Pol(Γ2) and Max-Sol(Γ1) is in APX andapproximable within a but NP-hard to approximate within b thenMax-Sol(Γ2) is approximable within a but NP-hard toapproximate within b.
Algebraic approach to Max-Sol(Γ)
TheoremIf Γ1 ⊆ 〈Γ2〉, then there is an S-reduction from Max-Sol(Γ1) toMax-Sol(Γ2).
Corollary
If Pol(Γ1) = Pol(Γ2) then Max-Sol(Γ1) is in PO (APX-complete,poly-APX-complete) iff Max-Sol(Γ2) is in PO (APX-complete,poly-APX-complete)
ObservationIf Pol(Γ1) = Pol(Γ2) and Max-Sol(Γ1) is in APX andapproximable within a but NP-hard to approximate within b thenMax-Sol(Γ2) is approximable within a but NP-hard toapproximate within b.
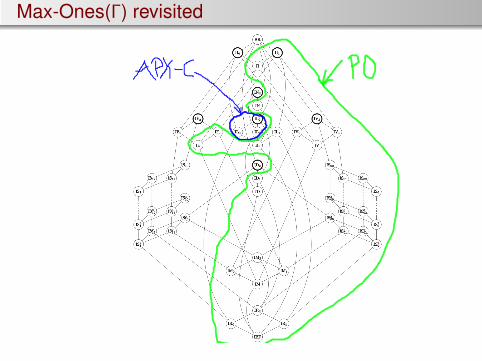
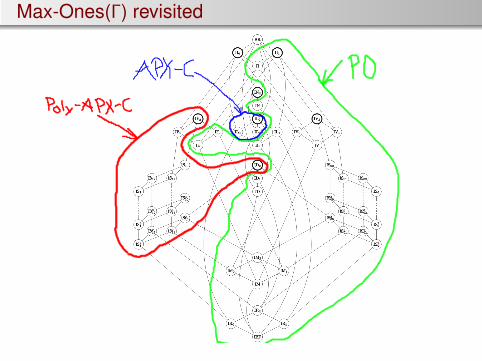
Max-Ones(Γ) revisited
Theorem ([Khanna, Sudan, Trevisan, Williamson 00])
Max-Ones(Γ) is either in PO, or APX-complete, orpoly-APX-complete, or finding a positive solution is NP-hard,or finding a feasible solution is NP-hard.
Max-Ones(Γ) revisited
Max-Ones(Γ) revisited
Max-Ones(Γ) revisited
Max-Ones(Γ) revisited
Max-Ones(Γ) revisited
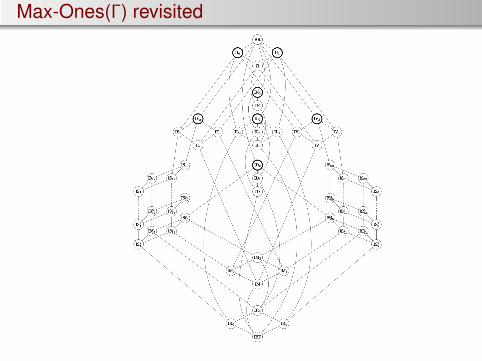
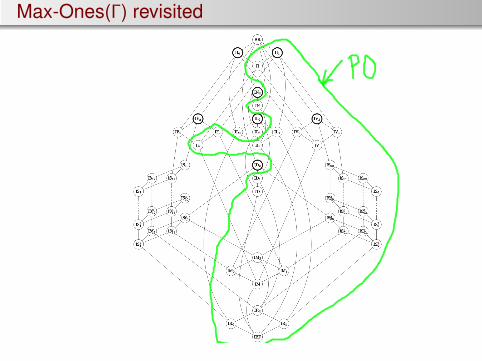
Theorem ([Khanna, Sudan, Trevisan, Williamson 00])
Max-Ones(Γ) is either in PO, or APX-complete, orpoly-APX-complete, or finding a positive solution is NP-hard,or finding a feasible solution is NP-hard.
ConjectureMax-Ones(Γ) is either in PO, or approximable within 2 andNP-hard to approximate within 2− ε for any ε > 0, orapproximable within O(n) and NP-hard to approximate withinO(n1−ε) for any ε > 0, or finding a positive solution is NP-hard,or finding a feasible solution is NP-hard.
Tractability: Generalised Max polymorphisms
DefinitionΓ is generalised max-closed if there exists a f ∈ Pol(Γ) suchthat for all a < b (a, b ∈ D) we have f (a, b) > a, f (b, a) > a, andfor all a ∈ D we have f (a, a) ≥ a.
TheoremIf Γ is generalised max-closed, then Max-Sol(Γ) is in PO.
Tractability: Generalised Max polymorphisms
DefinitionΓ is generalised max-closed if there exists a f ∈ Pol(Γ) suchthat for all a < b (a, b ∈ D) we have f (a, b) > a, f (b, a) > a, andfor all a ∈ D we have f (a, a) ≥ a.
TheoremIf Γ is generalised max-closed, then Max-Sol(Γ) is in PO.
Tractability: Generalised Max polymorphisms cont’d
LemmaIf Γ is generalised max-closed, then all relations
R = {(d11, d12, . . . , d1m), . . . , (dt1, dt2, . . . , dtm)}
in Γ have the property that the tuple
tmax = (max{d11, . . . , dt1}, . . . , max{d1m, . . . , dtm})
is in R, too.
Given an instance I of Max-Sol(Γ) where Γ is generalisedmax-closed:
Establish pairwise consistencyAssigning to each variable x the maximum value it isallowed to take by any constraint C(. . . , x , . . . ) is a solutionto I.
Tractability: Generalised Max polymorphisms cont’d
LemmaIf Γ is generalised max-closed, then all relations
R = {(d11, d12, . . . , d1m), . . . , (dt1, dt2, . . . , dtm)}
in Γ have the property that the tuple
tmax = (max{d11, . . . , dt1}, . . . , max{d1m, . . . , dtm})
is in R, too.
Given an instance I of Max-Sol(Γ) where Γ is generalisedmax-closed:
Establish pairwise consistencyAssigning to each variable x the maximum value it isallowed to take by any constraint C(. . . , x , . . . ) is a solutionto I.
Regular Signed Logic
Constraints are disjunctions of inequalities over a (totallyordered) domain D = {0, . . . , d}.
Example
D = {0, 1, 2},(x ≤ 0∨ y ≤ 1) ≡ {(0, 0), (0, 1), (0, 2), (1, 0), (1, 1), (2, 0), (2, 1)}
Example
D = {0, 1}, Max-Sol(x ≤ 0 ∨ y ≤ 0) is Maximum IndependentSet.
Example
D = {0, 1}, Min-Sol(x ≥ 1 ∨ y ≥ 1) is Minimum Vertex Cover,

Regular Signed Logic
Constraints are disjunctions of inequalities over a (totallyordered) domain D = {0, . . . , d}.
Example
D = {0, 1, 2},(x ≤ 0∨ y ≤ 1) ≡ {(0, 0), (0, 1), (0, 2), (1, 0), (1, 1), (2, 0), (2, 1)}
Example
D = {0, 1}, Max-Sol(x ≤ 0 ∨ y ≤ 0) is Maximum IndependentSet.
Example
D = {0, 1}, Min-Sol(x ≥ 1 ∨ y ≥ 1) is Minimum Vertex Cover,
Regular Signed Logic
Constraints are disjunctions of inequalities over a (totallyordered) domain D = {0, . . . , d}.
Example
D = {0, 1, 2},(x ≤ 0∨ y ≤ 1) ≡ {(0, 0), (0, 1), (0, 2), (1, 0), (1, 1), (2, 0), (2, 1)}
Example
D = {0, 1}, Max-Sol(x ≤ 0 ∨ y ≤ 0) is Maximum IndependentSet.
Example
D = {0, 1}, Min-Sol(x ≥ 1 ∨ y ≥ 1) is Minimum Vertex Cover,
Regular Signed Logic cont’d
ΓL denote constraint languages expressed by regular signedlogic clauses
Theorem ([Creignou, Hermann, Krokhin, Salzer 06])
For any ΓL CSP(ΓL) is either in P or NP-complete.
Max-Sol(ΓL): Classification
TheoremMax-Sol(ΓL) is in PO if ΓL is generalised max-closed andAPX-hard otherwise.
ΓL is generalised max-closed: DONE!ΓL not generalised max-closed implies that(x ≤ a ∨ y ≤ b) ∈ 〈ΓL〉 where a, b < max{D}APX-hardness of Max-Sol(x ≤ a ∨ y ≤ b) by reductionfrom MAX-3SAT
Max-Sol(ΓL): Classification
TheoremMax-Sol(ΓL) is in PO if ΓL is generalised max-closed andAPX-hard otherwise.
ΓL is generalised max-closed: DONE!ΓL not generalised max-closed implies that(x ≤ a ∨ y ≤ b) ∈ 〈ΓL〉 where a, b < max{D}APX-hardness of Max-Sol(x ≤ a ∨ y ≤ b) by reductionfrom MAX-3SAT
Min-Sol(ΓL): Classification
TheoremMin-Sol(ΓL) is in PO if ΓL is generalised min-closed andAPX-hard otherwise.
ΓL generalised min-closed implies that Min-Sol(ΓL) in POby the generalised max-closed algorithmAPX-hardness by reduction from Minimum Vertex Cover
Min-Sol(ΓL): Classification
TheoremMin-Sol(ΓL) is in PO if ΓL is generalised min-closed andAPX-hard otherwise.
ΓL generalised min-closed implies that Min-Sol(ΓL) in POby the generalised max-closed algorithmAPX-hardness by reduction from Minimum Vertex Cover
AW-Max-Sol(ΓL) (Arbitrary Weights are allowed):Classification
TheoremAW-Max-Sol(ΓL) is in PO if {min, max} ⊆ Pol(ΓL) andAPX-hard otherwise.
{min, max} ⊆ Pol(ΓL) implies that AW-Max-Sol(ΓL) can besolved by maximising a supermodular functionHardness by reductions from Max-Sol(ΓL) and Min-Sol(ΓL)
AW-Max-Sol(ΓL) (Arbitrary Weights are allowed):Classification
TheoremAW-Max-Sol(ΓL) is in PO if {min, max} ⊆ Pol(ΓL) andAPX-hard otherwise.
{min, max} ⊆ Pol(ΓL) implies that AW-Max-Sol(ΓL) can besolved by maximising a supermodular functionHardness by reductions from Max-Sol(ΓL) and Min-Sol(ΓL)
Maximal constraint languages
DefinitionΓ is a maximal constraint language over D if 〈Γ〉 ⊂ ALLD and forany R /∈ 〈Γ〉 we have 〈Γ ∪ {R}〉 = ALLD.
Theorem ([Bulatov, Krokhin, Jeavons 01], [Bulatov 04])
If Γ is a maximal constraint language, then CSP(Γ) is either in Por NP-complete.
TheoremIf Γ is a maximal constraint language, then Max-Sol(Γ) is eitherin PO, or APX-complete, or poly-APX-complete, or finding apositive solution is NP-hard, or finding a feasible solution isNP-hard.
Maximal constraint languages
DefinitionΓ is a maximal constraint language over D if 〈Γ〉 ⊂ ALLD and forany R /∈ 〈Γ〉 we have 〈Γ ∪ {R}〉 = ALLD.
Theorem ([Bulatov, Krokhin, Jeavons 01], [Bulatov 04])
If Γ is a maximal constraint language, then CSP(Γ) is either in Por NP-complete.
TheoremIf Γ is a maximal constraint language, then Max-Sol(Γ) is eitherin PO, or APX-complete, or poly-APX-complete, or finding apositive solution is NP-hard, or finding a feasible solution isNP-hard.
Maximal constraint languages
DefinitionΓ is a maximal constraint language over D if 〈Γ〉 ⊂ ALLD and forany R /∈ 〈Γ〉 we have 〈Γ ∪ {R}〉 = ALLD.
Theorem ([Bulatov, Krokhin, Jeavons 01], [Bulatov 04])
If Γ is a maximal constraint language, then CSP(Γ) is either in Por NP-complete.
TheoremIf Γ is a maximal constraint language, then Max-Sol(Γ) is eitherin PO, or APX-complete, or poly-APX-complete, or finding apositive solution is NP-hard, or finding a feasible solution isNP-hard.
Maximal constraint languages cont’d
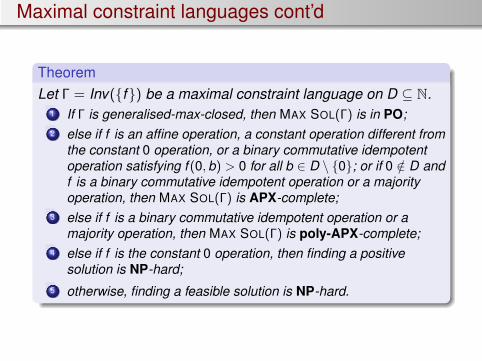
TheoremLet Γ = Inv({f}) be a maximal constraint language on D ⊆ N.
1 If Γ is generalised-max-closed, then MAX SOL(Γ) is in PO;2 else if f is an affine operation, a constant operation different from
the constant 0 operation, or a binary commutative idempotentoperation satisfying f (0, b) > 0 for all b ∈ D \ {0}; or if 0 /∈ D andf is a binary commutative idempotent operation or a majorityoperation, then MAX SOL(Γ) is APX-complete;
3 else if f is a binary commutative idempotent operation or amajority operation, then MAX SOL(Γ) is poly-APX-complete;
4 else if f is the constant 0 operation, then finding a positivesolution is NP-hard;
5 otherwise, finding a feasible solution is NP-hard.
Future Work
CONJECTURE: Max-Sol(Γ) is either in PO, or APX-complete,or poly-APX-complete, or finding a positive solution is NP-hard,or finding a feasible solution is NP-hard.
Ladner’s theorem and CSP(Γ)
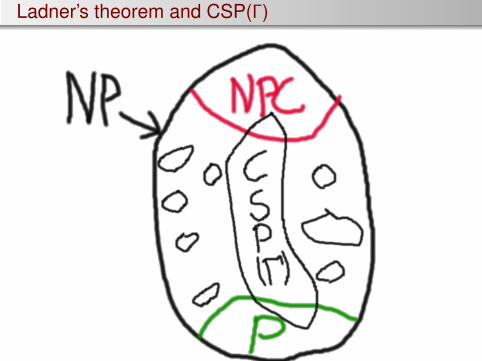
Ladner’s theorem and CSP(Γ)
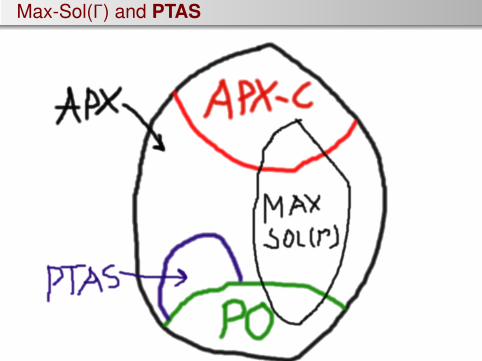
Max-Sol(Γ) and PTAS
Future Work
CONJECTURE: Max-Sol(Γ) is either in PO, or APX-complete,or poly-APX-complete, or finding a positive solution is NP-hard,or finding a feasible solution is NP-hard.
OpenMax-Sol(Γ) where Γ is a graphMax-Sol(Γ) over 3-element domains
Future Work
CONJECTURE: Max-Sol(Γ) is either in PO, or APX-complete,or poly-APX-complete, or finding a positive solution is NP-hard,or finding a feasible solution is NP-hard.
OpenMax-Sol(Γ) where Γ is a graphMax-Sol(Γ) over 3-element domains