Classical Mechanics and Elektrodynamics - TKM …kremer/ph10/physics.pdfChapter 2 Basic Concepts 2.1...
62
Classical Mechanics and Elektrodynamics F = m ¨ x E d A = Q ǫ 0 Summer 2011 Dipl.-Phys. Stefan Kremer 27. July 2011
Transcript of Classical Mechanics and Elektrodynamics - TKM …kremer/ph10/physics.pdfChapter 2 Basic Concepts 2.1...

Classical Mechanics andElektrodynamics
~F = m~x
∫~Ed ~A =
Qǫ0
Summer 2011
Dipl.-Phys. Stefan Kremer
27. July 2011

Copyright c© (2011) Stefan Kremer. Permission granted to reproduce forpersonal and educational use only. Commercial copying, hiring, lending is
prohibited. In all cases this notice must remain intact.

Contents
Contents 3
1 Mathematical Preface 51.1 Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Vector Algebra . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Coordinate Systems . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Basic Concepts 82.1 Physics and the Scientific Method . . . . . . . . . . . . . . . . 82.2 Physical Quantities . . . . . . . . . . . . . . . . . . . . . . . . 9
I Classical Mechanics 11
3 Kinematics and Kinetics 123.1 Motions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2 Circular Motion 1 . . . . . . . . . . . . . . . . . . . . . . . . . 143.3 Summary: Kinematics . . . . . . . . . . . . . . . . . . . . . . 163.4 Newton’s Axioms . . . . . . . . . . . . . . . . . . . . . . . . . 173.5 Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.6 Work and Conservation Laws . . . . . . . . . . . . . . . . . . 203.7 Applications: Collisions . . . . . . . . . . . . . . . . . . . . . . 233.8 Circular Motion 2 . . . . . . . . . . . . . . . . . . . . . . . . . 243.9 Application: Planetary Motion . . . . . . . . . . . . . . . . . . 243.10 Motion of a Rigid Body . . . . . . . . . . . . . . . . . . . . . 263.11 Summary: Translation and Rotation . . . . . . . . . . . . . . 30
4 Oscillations and Waves 314.1 Simple Harmonic Oscillator . . . . . . . . . . . . . . . . . . . 314.2 Applications: The Mathematical and the Physical Pendulum . 324.3 Damped Harmonic Oscillator . . . . . . . . . . . . . . . . . . 34

4.4 Enforced Oscillations . . . . . . . . . . . . . . . . . . . . . . . 354.5 Damped Enforced Oscillations . . . . . . . . . . . . . . . . . . 364.6 Wave Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.7 Superposition and Interference of Waves . . . . . . . . . . . . 384.8 Doppler Effect . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
II Classical Electrodynamics 41
5 Electrostatics 425.1 The Electric Charge . . . . . . . . . . . . . . . . . . . . . . . 425.2 Maxwell’s Equations . . . . . . . . . . . . . . . . . . . . . . . 425.3 The Electric Field - Coulomb’s Law . . . . . . . . . . . . . . . 445.4 Electric Potential, Voltage and Work in an Electric Field . . . 455.5 Application: Motion in a Homogeneous Electric Field . . . . . 465.6 Capacity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.7 Matter in an Electric Field . . . . . . . . . . . . . . . . . . . . 48
6 Electric Direct Current 496.1 Electric Current . . . . . . . . . . . . . . . . . . . . . . . . . . 496.2 Kirchhoff’s Rules . . . . . . . . . . . . . . . . . . . . . . . . . 506.3 Electric Work and Power . . . . . . . . . . . . . . . . . . . . . 51
7 Electromagnetism 527.1 The Magnetic Field . . . . . . . . . . . . . . . . . . . . . . . . 527.2 Lorentz Force . . . . . . . . . . . . . . . . . . . . . . . . . . . 527.3 Magnetic Flux and Magnetic Induction . . . . . . . . . . . . . 537.4 Self-Inductance . . . . . . . . . . . . . . . . . . . . . . . . . . 547.5 Matter in a Magnetic Field . . . . . . . . . . . . . . . . . . . . 547.6 Applications: Electromagnetic Machines . . . . . . . . . . . . 55
8 Electric Oscillations and Electric Waves 588.1 The RL-Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . 588.2 The RC-Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . 608.3 Electric Resonant Circuits . . . . . . . . . . . . . . . . . . . . 618.4 Summary: Electronics . . . . . . . . . . . . . . . . . . . . . . 62

Chapter 1
Mathematical Preface
1.1 Calculus
Let f : R→ R be a function. The derivative of f is defined by
f ′(x) =df
dx= lim
h→0
f(x + h)− f(x)
h. (1.1)
For calculations it is useful to memorize some functions and their derivatives:
Function f(x) Derivative f ′(x)
c 0xn nxn−1
ex ex
log(x) 1x
sin(x) cos(x)cos(x) − sin(x)
The derivatives of compositions can be evaluated by the following rules:
Rule Function f(x) f ′(x)
Product g(x)h(x) g′(x)h(x) + g(x)h′(x)Chain g
(
h(x))
g′(
h(x))
· h′(x)
Quotient g(x)h(x)
g′(x)h(x)−g(x)h′(x)h2(x)
The anti-derivative F (x) of a function f(x) is defined by
F ′(x) = f(x) or
∫
f(x)dx = F (x) . (1.2)
Note: F (x) is not uniquely defined. If F (x) is an anti-derivative of f(x) thenF (x) = F (x) + c with c ∈ R is another one.

6 Chapter 1 Mathematical Preface
The definite integral which represent the area enclosed by the integrandf(x), the x-coordinate and the lines with x = a and x = b, is given by
∫ b
a
f(x)dx = F (b)− F (a) . (1.3)
For the composition of functions the following formulas have proven useful:
Rule Function f(x) F (x) =∫
f(x)dx
Integration by parts g(x)h′(x) g(x)h(x)−∫
g′(x)h(x)dx
Substitution g(
h(x))
h′(x) G(
h(x))
=∫
g(h)dh
1.2 Vector Algebra
A vector ~x ∈ Rn can be characterized by its Cartesian coordinates x1, . . . xn:
~x =
x1...
xn
, (1.4)
It can be added to another one ~y or might be multiplied by a scalar α:
~x + ~y =
x1 + y1...
xn + xn
α~x =
αx1...
αxn
(1.5)
Furthermore its length is defined by its absolute value
|~x| = x =
√
√
√
√
n∑
i=1
x2i =
√
x21 + . . . x2
n (1.6)
and the angle φ which is enclosed by the vectors ~x and ~y, is given by the dotproduct (scalar product)
~x · ~y = ~x~y =
n∑
i=1
xiyi = xy cos(φ) = ~y · ~x . (1.7)
Therefore the dot product vanishes ~x ·~y = 0, if the vectors are perpendicular~x ⊥ ~y.

1.3 Coordinate Systems 7
Additionally, in R3 the cross product (vector product) of two vectors ~x and
~y can be defined by
~x× ~y =
x1
x2
x3
×
y1
y2
y3
=
x2y3 − x3y2
x3y1 − x1y3
x1y2 − x2y1
= −~y × ~x . (1.8)
This product is related to the included angle φ, too:
|~x× ~y| = |~x| |~y| | sin(φ)| (1.9)
From this relation the following properties of the vector product can beobtained:
(i) ~x× ~y is perpendicular to ~x and ~y .
(ii) |~x × ~y| can be interpreted as the unsigned area of the parallelogramhaving ~x and ~y as sides.
(iii) ~x, ~y, ~x× ~y is right-handed.
(iv) ~x× ~y = 0 if ~x||~y.
A double cross product can be related to the dot product by the triple productexpansion:
~a× (~b× ~c) = ~b(~a~c)− ~c(~a~b) (1.10)
1.3 Coordinate Systems
In order to uniquely identify a position of an object a vector has to be com-bined with a point of origin. Besides the Cartesian coordinate systemused in Eq. (1.5), the polar coordinate system has proven useful for sys-tems with rotational symmetries (e.g. a circular motion). This coordinatesystem include a radial and an angular coordinate (r, φ), which can be con-nected to suitable Cartesian coordinates (x1, x2):
(
x1
x2
)
=
(
r cos φr sin φ
)
with r =√
x21 + x2
2, tanφ =x2
x1(1.11)

Chapter 2
Basic Concepts
2.1 Physics and the Scientific Method
The word physics stems form the Greek word φυσικη, which simple meansnature. The aim of physics is to model the inanimate part of our environ-ment based on reproducible observations. From this model understandingabout the underlying laws of nature is obtained as well as predictions arededuced which can then be used to test the model (see Fig. 2.1). The model
Environment Model Predictions
Figure 2.1: Modeling in physics: Events from the inanimate nature are modeled, in orderto obtain an deeper understanding and make further predictions about nature.
is usually expressed in the form of only a few axioms or postulates, whilethe deduction of the predictions are usually performed by the help of math-ematics. However, while some predictions of such a theory will be verified,some might be contradicted by experiment. These experiments can then beused to formulate improved models. Since the old theory still has provenwithin a certain “range”, the improved model can still be tested against theold one within this range.For instance classical mechanics is fully determined by the three Newton’slaws. However, it fails to describe physical processes on the atomic level and

2.2 Physical Quantities 9
has to be extended to quantum mechanics there. Additionally, if one dealswith huge velocities (compared to the velocity of light) classical mechanicshas to be extended to the special theory of relativity.
2.2 Physical Quantities
Measuring the predicted quantities of a model means comparing these quan-tities to a common standard. This standard is expressed by the unit whenstating the value of this quantity. For instance the angle, introduced inEq. (1.7), can be compared to the seconds on a clock face or to the length ofthe circumference of a unit circle. The former one is denoted in degree withsymbol and the latter one in radian with symbol rad. According to custom,only in the latter case or when the quantity vanishes the unit is omitted.In this lecture The International System of Units (SI) will be used,which has the following base units:
Physical quantity Unit Symbol
Time Second sLength Meter mMass Kilogram kg
Electric Current Ampere ATemperature Kelvin K
Amount of substance Mole molLuminous intensity Candela cd
Besides these base units, combined ones like the Newton N = kgm2/s arealso defined. Additionally, the units can be accompanied by a prefix, e.g.one of the following:
Factor 109 106 103 10−2 10−3 10−6 10−9 10−12
Prefix giga mega kilo centi milli micro nano picoShortcut G M k c m µ n p
The order of magnitude, which is described by these prefixes, can also bewritten explicitly when using scientific notation. In this notation leadingzero-digits do not appear, therefore the first digit is followed by the decimalpoint. Thus it states most clearly the significant digits of a physical quan-tity. The statement of a (possible) measurement of a physical quantity istherefore expressed in the following pattern:
(physical value) = (numeric value) [× 10order of magnitude] [prefix](unit) (2.1)


Part I
Classical Mechanics

Chapter 3
Kinematics and Kinetics
3.1 Motions
As stated in section 1.3 the position of a particle is described by a vector ~r fora given coordinate system with fixed point of origin. Therefore the motionis characterized by a function of this quantity in time t. Mathematicallythis is a mapping [t1, t2] ⊂ R → R
d where d = 1, 2, 3 is the dimension ofthe problem. For simplicity we will start with a linear motion d = 1, thatmeans we are looking at the position
x(t), [x(t)] = m . (3.1)
The velocity or speed v(t) of a particle specifies the (linear) change of thisquantity and therefore is given by
v(t) = limh→0
x(t + h)− x(t)
h=
dx(t)
dt= x(t) [v(t)] =
m
s, (3.2)
where the derivative with respect to the time t is denoted with a dot, whichis the common notation in physics. In analogy the acceleration a(t) of aparticle characterizes the change of the velocity:
a(t) = limh→0
v(t + h)− v(t)
h= v(t), [a(t)] =
m
s2. (3.3)
As we will see later on, constant acceleration a(t) = a is quite common inphysics. In this case, integrating Eq. (3.3) once the velocity is obtained:
v(t) =
∫
a dt = at + v0 (3.4)
with an integration constant v0. Therefore the velocity increases (a > 0) ordecreases (a < 0) linearly with time at constant acceleration. In the case

3.1 Motions 13
a = 0 the velocity stays constant. This is called a uniform motion.To obtain x(t) we integrate Eq. (3.4) once more and obtain
x(t) =a
2t2 + v0t + x0 . (3.5)
This is the path of the particle in one dimension under a constant acceler-ation. There are two undetermined integration constants v0 and x0. Thusthe motion of the particle is uniquely defined if the position and the veloc-ity at the same or different times or two positions at different times or twovelocities at different times are specified.
EXAMPLE A particle is accelerated with a = 10 ms2
. At time t = 0 sthe particle is at x(0 s) = 0 m and at time t = 2 s at x(2 s) = 40 m.Determine the position x(t) of the particle with respect to time.We have
0 m = x(0 s) = x0
40 m = x(2 s) = 20 m + 2 s · v0
Thus x0 = 0 m and v0 = 10 ms
and we get:
x(t) = 5m
s2· t2 + 10
m
s· t
By the use of the description of the components of a vector Eq. (1.4), thesedefinitions and calculations can easily be generalized to d = 3 dimensions. Inthis case and again at constant acceleration ~a one has in vector or componentnotation
~r(t) =~a
2t2 + ~v0t + ~r0 or
x(t) = ax
2t2 + vxt + x0
y(t) = ay
2t2 + vyt + y0
z(t) = az
2t2 + vzt + z0
. (3.6)
EXAMPLE Assume a particle that is at time t = 0 at (0, 0, 0) and has onlyvelocity vx = 1 m
sin the x-direction, and which is accelerated through
gravity by −g = −10 ms2
in the y-direction. State ~r(t) and sketch themotion.For ~r(t) we easily find
~r(t) =
x(t)y(t)z(t)
=
vxt−g
2t2
0

14 Chapter 3 Kinematics and Kinetics
If we solve the equation for x(t) with respect to t and insert this ex-pression for the time in the equation for y(t), we obtain a parabola
y(x) = −g
2
x2
v2x
= −5 m−1 · x2 .
The last exercise serves as a good example for the so called principle ofsuperposition. We are dealing here with two independent motions: On theone hand we have the motion in x-direction with a constant velocity (i.e. noacceleration) and on the other hand we have have motion in the z-directionwith a linearly increasing velocity (i.e. constant acceleration). These twomotions are simply added
~r(t) =
vxt0−g
2t2
=
vxt00
+
00−g
2t2
. (3.7)
This is called the principle of superposition.
3.2 Circular Motion 1
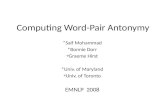
Another important kind of motion is the circular motion as depicted inFig. 3.1. We consider a particle moving on a circle in the x-y-plane withradius r. For this kind of motion it is more convenient to deal with theangular velocity ω(t):
ω(t) = φ(t), [ω] =1
s(3.8)
x
y
φ
~v
~a
Figure 3.1: Circular motion of a particle.

3.2 Circular Motion 1 15
We are interested in a constant angular velocity, that is φ(t) = ω(t) = 0 andtherefore
ω(t) = ω =∆φ
∆t=
2π
T(3.9)
where T is the time of circulation or period. Often the (physical) fre-quency f of the circulation defined by
f =ω
2π=
1
T, [f ] =
1
s(3.10)
is used to characterize the time of circulation. For φ(t) we get:
φ(t) =
∫
ω dt = ωt + φ0 (3.11)
If we introduce polar coordinates, set φ0 = 0 we are able to specify theposition of the particle in Cartesian coordinates
~r(t) =
(
x(t)y(t)
)
=
(
r cos(ωt)r sin(ωt)
)
. (3.12)
For the velocity ~v(t) we obtain
~v(t) =
(
vx(t)vy(t)
)
=
(
x(t)y(t)
)
= ω
(
−r sin(ωt)r cos(ωt)
)
(3.13)
It can be easily seen, that for each time t it holds ~r(t) ⊥ ~v(t) since
~r(t) · ~v(t) =
(
r cos(ωt)r sin(ωt)
)
·(
−r sin(ωt)r cos(ωt)
)
(3.14)
= r2ω(
− cos(ωt) sin(ωt) + sin(ωt) cos(ωt))
= 0 (3.15)
If we are interested in the absolute value of the velocity, we have to take thethe absolute value of ~v(t) in Eq. (3.13) resulting in
|~v(t)| = v = ωr . (3.16)
Another way to obtained this result is simply noting that the particle needsT = 2π
ωto go one time around the circle and covering thereby a distance of
s = 2πr, such that
v =2πr2πω
= ωr . (3.17)

16 Chapter 3 Kinematics and Kinetics
Since ~r(t) ⊥ ~v(t) we can write
~v = ~ω × ~r (3.18)
where ~ω points outside the x-y plane along the axis of rotation. For theacceleration ~a we finally obtain:
~a(t) =
(
ax(t)ay(t)
)
=
(
vx(t)vy(t)
)
= −ω2
(
r cos(ω t)r sin(ωt)
)
= −ω2~r(t) (3.19)
We again see, that ~a(t) ⊥ ~v(t), and that the acceleration is always pointingin the negative ~r(t) direction. The absolute value aC = |~a(t)| is given by
aC = ω2r (3.20)
This is called centripetal acceleration.
3.3 Summary: Kinematics
~a Kind of motion Mathematical description
~a = ~0 uniform x(t) = v0t + x0
~v ‖ ~a,~a = const
linear motion with constantacceleration
x(t) = 12at2 + v0t + x0
~v 6‖ ~a,~a = const
planar motion:2-dimensional superpositionof a uniform one (e.g. in x-direction and a motion withconstant acceleration (e.g.in y-direction)
Maximal height h =vy,0
2
2areached
at T =vy,0
a
Same initial height at T = 2Tdefining the range s =
vx,0vy,0
a
~v ⊥ ~a,a = const
circular
(
x(t)y(t)
)
= r
(
cos(ωt + φ) + x0
sin(ωt + φ) + y0
)
,
with v = ωr and a = ω2r
~v 6⊥ ~a,a = const
helical
x(t)y(t)z(t)
=
r cos(ωt + φ) + x0
r sin(ωt + φ) + y012azt
2 + vz,0t + z0
,
with√
vx,02 + vy,0
2 = ωr
and√
ax,02 + ay,0
2 = ω2r

3.4 Newton’s Axioms 17
3.4 Newton’s Axioms
So far we dealt only with the question how to describe the motion of amass point (that is the path ~r(t) of the mass point). This section addressesthe question, what makes a body moving and changing its state of motion.The answer is: A force exactly does this. Isaac Newton (1643-1727) wasthe first who realize that for a given body the absolute value of the forceis proportional to the absolute value of the acceleration. The constant ofproportionality is called the (inertial) mass m. This is Newton’s secondaxiom (the principle of action):
~F = m~r [m] = kg, [F ] = N = kgm
s2(3.21)
In defining the momentum as ~p = m~r = m~v, the axiom simplifies to
~F = ~p, [~p] = kgm
s. (3.22)
Even though the last two equations define the mass m, for practical purposesit is more important to ask the following two questions:
(a) What is ~r, if ~F and m are given?
(b) What is ~F , if ~r and m are given?
We will mainly address the first question during this lecture. If the force~F in Eq. (3.21) is zero, we see that ~v is constant. This is Newton’s firstaxiom (principle of inertia):Each body, on which no force acts stays at rest or moves with a constantvelocity.In short notation this axiom may be written as
∑
i
~Fi = 0 ⇔ ~v = const . (3.23)
In addition Newton’s third axiom (actio = reactio) states, that if a body 1
acts on a body 2 by a force ~F12, then body 2 acts on body 1 with a force ~F21,such that
~F12 = −~F21 . (3.24)

18 Chapter 3 Kinematics and Kinetics
3.5 Forces
In this section the most common forces are introduced: Foremost, it shouldbe emphasized that for all forces as well as for velocities holds the principleof superposition, i.e. forces may be composed and decomposed.
GravityThe gravitational force between two bodies with (gravitational) masses m1,m2 which are separated by a distance r is given by
~F = −Gm1m2
r2~r or F = G
m1m2
r2(3.25)
with the unit vector ~r = ~rr
and the gravitational constant
G = 6, 67 · 10−11 m3
kg s2(3.26)
If we are interested in the absolute value of the gravitational force near theearth we set m2 = me = 5, 97 · 1024 kg and r = re = 6370 km and get thesimplified version
FG = mG me
r2e
≡ mg (3.27)
with Earth’s gravity g = 9, 81 ms2
(in the exercises we will often use g = 10 ms2
).
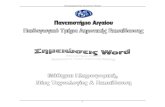
EXAMPLE A common example is the calculation of the acceleration of amass m on an inclined plane. As shown in Fig 3.2 we decomposethe gravitational force FG in the two components normal force FN anddownhill-slope force FD which are given by
FD = FG sin α
FN = FG cos α
Therefore the acceleration of the mass is given by Newton’s secondaxiom:
a =FD
m=
mg
msin α = g sin α

3.5 Forces 19
α
αFG
FN
FD
Figure 3.2: Decomposition of forces on an inclined plane.
Hook’s lawThe force of a spring is given by (in d = 1):
FH = −Dx [D] =N
m(3.28)
with the spring constant D.
FrictionWe will consider two kinds of friction forces:
(i) Static friction: A body which is attached to another one will be pre-vented to start moving. The corresponding maximal force is given by
FS = µ FN (3.29)
with the coefficient of static friction µ with values usually between 0.02and 1.
EXAMPLE As an example we consider again a body with mass mon an inclined plane and ask at which angle it will begin to move.Again, the following forces are relevant:
FD = mg sin α
FN = mg cos α
The body just starts to move if FD = µFN , that is
m g sin α = µ m g cos α or tan α = µ .

20 Chapter 3 Kinematics and Kinetics
(ii) Stokes friction: If an object is moving through a media (e.g. air), thefriction force is given by
FR = −γS v (3.30)
with the Stokes friction coefficient γS. This friction will play a rolewhen we discuss damped oscillations.
Centripetal and Centrifugal ForceIn section 3.2 we saw, that an object moving on a circle with some constantvelocity v has a changing direction of motion, i.e. the vector v(t) changes itsdirection. The rate of this change in velocity is the centripetal accelerationaC = ω2r = v2
rwith v = ωr, caused by the Centripetal force
FC =mv2
r(3.31)
The corresponding fictitious force which would be felt by another objectinside the moving one is called centrifugal force.
3.6 Work and Conservation Laws
Generally work is defined by
W =
∫ ~r2
~r1
~F (~r) · d~r, [W ] = J (3.32)
We again constrict ourself to the one dimensional case where this formulareduces to
W =
∫ x2
x1
F (x) dx . (3.33)
EXAMPLES
(i) Work needed to uplift a body with mass m under the influence ofgravitation from 0 to h:
Epot =
∫ h
0
FG dx =
∫ h
0
mg dx = mgh (3.34)
(ii) Work needed to move a body with mass m attached to a spring withspring constant D from position 0 to s:
Epot =
∫ s
0
FH dx =
∫ s
0
Dx dx =1
2Ds2 (3.35)

3.6 Work and Conservation Laws 21
(iii) Work needed needed to accelerate a particle with mass m from 0 to v0
(kinetic energy):
Ekin =
∫
F dx =
∫
mdv
dtdx = m
∫ v0
0
v dv =m
2v20 (3.36)
Now we will discuss energy and the conservation of energy. We considera particle with mass m subject to a force F = F (x) in one dimension, i.e.its motion is governed by the second Newton’s law F
(
x(t))
= mx(t). Let usdefine
V (x) = −∫
F (x) dx ⇔ F (x) = −V ′(x) (3.37)
where V (x) is called potential. With this definition Newtons second axiomreads:
− V ′(
x(t))
= mx(t) (3.38)
In multiplying this equation by x(t) and using the chain rule a conservationlaw is obtained:
− V ′(
x(t))
x(t) = mx(t)x(t) (3.39)
⇔ d
dt
(m
2x2 + V (x)
)
= 0 (3.40)
Thus, the expression in the brackets is constant (as a function of time) andcalled energy E. Using v = x the conservation of energy reads
E =m
2v2 + V (x) (3.41)
meaning the sum of kinetic and potential energy remains constant.
EXAMPLES
(i) Energy of a (moving) body with mass m subject to gravity:
FG(x) = −mg ⇒ V (x) = mgx ⇒ E =m
2v2 + mgx (3.42)
(ii) Energy of a (moving) mass m attached to a spring with constant D:
FH(x) = −Dx ⇒ V (x) =D
2x2 ⇒ E =
m
2v2 +
D
2x2 (3.43)

22 Chapter 3 Kinematics and Kinetics
Next we are going to consider the momentum of a system of two interactingparticles. Newton’s third law tells, that ~F12 = −~F21, that means
m1~r1 + m2~r2 = 0 ⇒ d
dt
(
m1~r1 + m2~r2
)
= 0 (3.44)
Therefore, the total momentum
~P = ~p1 + ~p2 = m1~r1 + m2~r2 (3.45)
is conserved.
EXAMPLE As an example we want to describe the motion of the centerof two masses m1 and m2 which are only subjects their pairwise force.The center of the two masses is defined by
~R =m1~r1 + m2~r2
m1 + m2=
1
M(m1~r1 + m2~r2) (3.46)
with the total mass M = m1 + m2.Its time derivative
~R =1
M(m1~r1 + m2~r2) =1
M(~p1 + ~p2) =1
M~P (3.47)
is proportional to the total momentum ~P . Since this quantity is con-served we can conclude that the center of the two masses performs anuniform motion .
This example can easily be generalized to a system with N particles (a two
body interaction is still assumed). Since ~Fik = −~Fki we have∑
i
∑
k 6=i~Fik = 0
and due to the force acting on the particle i is ~Fi =∑
k 6=i~Fki = ~pi we have
~P =∑
i
~pi =∑
i
∑
k 6=i
~Fik = 0 (3.48)
and therefore we find again that the total momentum ~P is a constant ofmotion. Likewise, the center of mass
~R =
∑
i mi~ri∑
i mi
=1
M∑
i
mi~ri (3.49)
performs an uniform motion.

3.7 Applications: Collisions 23
3.7 Applications: Collisions
In order to discuss an application we will consider the collision of two particlesin one dimension, i.e. a process
v1, v2 → v′1, v
′2 . (3.50)
We will take a closer look at two distinct situations, each with differentconservation laws to be applied:
ELASTIC COLLISION INELASTIC COLLISIONConservation of Momentum Conservation of Momentumm1v1 + m2v2 = m1v
′1 + m2v
′2 m1v1 + m2v2 = m1v
′1 + m2v
′2
Conservation of energy Energy is not conserved:Some energy is converted into heat
m1
2v1
2 + m2
2v2
2 = m1
2v′12 + m1
2v′22 m1
2v1
2 + m2
2v2
2 = m1
2v′12 + m1
2v′22 + Q
Taking into account the conservation of momentum and energy for the elas-tic collision we obtain:
m1(v1 − v′1) = m2(v
′2 − v2) (3.51)
m1(v21 − v′2
1 ) = m2(v′22 − v2
2) (3.52)
Using the third binomial law we get
m1(v1 − v′1) = m2(v
′2 − v2) (3.53)
m1(v1 − v′1)(v1 + v′
1) = m2(v′2 − v2)(v
′2 + v2) . (3.54)
Thus we have
v1 + v′1 = v2 + v′
2 (3.55)
and together with the conservation of momentum
v′1 =
(m1 −m2)v1 + 2m2v2
m1 + m2and v′
2 =(m2 −m1)v2 + 2m1v1
m1 + m2. (3.56)
In the case of an inelastic collision we will only consider the special caseof v2 = 0 and that the two bodies stick together right after the collision, i.e.they are moving with the same velocity v′
1 = v′2. Such a collision is called
total inelastic collision. Thus, the conservation laws
m1v1 = (m1 + m2)v′1 (3.57)
m1
2v21 =
m1 + m2
2v′12+ Q (3.58)
yield
v′1 =
m1
m1 + m2v1 and Q =
1
2
m1m2
m1 + m2v21 . (3.59)

24 Chapter 3 Kinematics and Kinetics
3.8 Circular Motion 2
We consider again a particle moving around some axis, which we will call ~ω.The velocity is given by
~v(t) = ~ω × ~r(t) . (3.60)
If the vector ~r(t) is in a plane perpendicular to the axis ω this formula simpli-fies to v = ωr (see sec. 3.2), where r = |~r| is the distance from the axis to theparticle. Since for rotation the momentum of the particle is not conservedit is better to look at the angular momentum ~L or correspondingly thetorque ~M which are defined by
~L = ~r × ~p [~L] = kgm2
s(3.61)
~M = ~r × ~F [ ~M ] = kgm2
s2(3.62)
Since ~r is parallel to ~p = m~r and with ~p = ~F we obtain
~L = ~M (3.63)
With respect to Eq. (3.60) the kinetic energy of this particle may be rewrittenas the rotational energy
Er =m
2~v2 =
m
2(~ω × ~r)2 =
m
2ω2r2 (3.64)
In the last step we assumed again an axis perpendicular to the plane ofmotion. Defining the moment of inertia Θ by
Θ = mr2 (3.65)
we can rewrite the energy as
Er =Θ
2ω2 (3.66)
3.9 Application: Planetary Motion
Devoted to the motions of planets in our solar system, the Kepler problemdeals with the motion of two masses m1 and m2 under the influence of thegravitational force
~F12 = −Gm1m2
|~r1 − ~r2|3(~r1 − ~r2) = −~F21 . (3.67)
Kepler’s laws contain the following statements:

3.9 Application: Planetary Motion 25
(1) The orbit of a planet around a star is an ellipse with the star at onefocus.
(2) A line joining a planet and its star sweeps out equal areas during equalintervals of time. This is known as the law of equal areas, too.
(3) The squares of the orbital periods of planets are directly proportionalto the cubes of the semi-major axis of the orbits.
We will first prove the second statement. Since ~F ∝ ~r, we see from Eq. (3.62)
that ~M = 0 and consequently ~L is a constant of motion:
~L = const (3.68)
In particular that tells us, that the motion takes place in a plane. FromFig. 3.3 we can see that the area the position vector covers during an in-finitesimal time is
dA =1
2|~r × d~r| . (3.69)
Taking the time derivative we obtain
A =dA
dt=
1
2
∣
∣
∣
∣
~r × d~r
dt
∣
∣
∣
∣
=1
2m|~r × ~p| = L
2m= const . (3.70)
This is the mathematical formulation of Kepler’s second law.For the first and third law let us first recall the definition of the center ofmass ~R = 1
M(m1~r1 +m2~r2) withM = m1 +m2. If we furthermore introduce
the relative distance ~r = ~r1 − ~r2 between the two masses we can expressthe individual positions through this quantities by
~r1 = ~R +m2
M~r (3.71)
~r2 = ~R− m1
M~r . (3.72)
~r
d~rdA
Figure 3.3: Derivation of Newton’s second law. The solid filled triangular is the areadA = 1
2|~r × d~r|.

26 Chapter 3 Kinematics and Kinetics
Since the center of mass ~R is a constant of motion we can choose our co-ordinate system such that the origin coincides with the center of mass. Weobtain
~r1 = +m2
M~r (3.73)
~r2 = −m1
M~r . (3.74)
Thus, the equation of motion
m1~r1 = −Gm1m2
|~r1 − ~r2|3(~r1 − ~r2) (3.75)
may be rewritten as
m1m2
M ~r = −Gm1m2
r3~r (3.76)
with r = |~r|. Since the angular momentum ~L is a constant of motion themotion is situated in a plane, which we will choose to be the x− y plane (bya suitable coordinate system). Furthermore we will only prove a special (andeasier) case of an elliptic motion – the circular motion. We make the ansatz
~r(t) =
r cos(ωt)r sin(ωt)
0
⇒ ~r(t) = −ω2
r cos(ωt)r sin(ωt)
0
. (3.77)
This yields
− 1
m1 + m2
ω2 = −G1
r3, (3.78)
and with ω = 2πT
(T being the time of circulation) we finally obtain
T 2 =4π2
G(m1 + m2)r3 . (3.79)
That proves the first and third law.
3.10 Motion of a Rigid Body
A simple rigid body can be defined as N discrete masses mi, i = 1, . . . , Nwith pairwise fixed distances. The positions of the individual masses will bedenoted by ~ri. With these definitions the kinetic energy takes the form
E =1
2
N∑
i=1
mi(~ri)2 . (3.80)

3.10 Motion of a Rigid Body 27
Using the coordinate of the center of mass ~R = 1M
∑
i mi~ri and relative
coordinates ~ri′ = ~ri − ~R, we can rewrite the energy as
E =1
2
N∑
i=1
mi~R2 +
1
2
N∑
i=1
mi(~ri′)2 + ~R
N∑
i=1
mi~ri′ . (3.81)
Since the definition of the new coordinates the latter sum will vanish:
N∑
i=1
mi~ri −N∑
i=1
mi~R =
N∑
i=1
mi~ri − ~RM =N∑
i=1
mi~ri −N∑
i=1
mi~ri = 0 (3.82)
and therefore the kinetic part of the energy results in
E =1
2
(
N∑
i=1
mi
)
~R2 +1
2
N∑
i=1
mi(~ri′)2 . (3.83)
The latter term can be rewritten when considering the body rotating aroundan axis ~ω through the center of mass. Since the velocity is then given by~ri
′ = ~ω×~ri′ and therefore with (~ω×~ri
′)2 = ω2(r′⊥,i)2 the energy is given by
E =1
2
(
N∑
i=1
mi
)
~R2 +1
2ω2
N∑
i=1
mi(r′⊥,i)
2 (3.84)
=1
2M ~R2 +
1
2Θω2 . (3.85)
where we defined the moment of inertia for a system consisting of Nparticles
Θ =N∑
i=1
mi(r′⊥,i)
2 . (3.86)
Since the energy of the rigid body decompose in two parts E = Ekin+Erot weconclude that the motion of the rigid body consists always of a translationand a rotation which are independent. The part of the translation containsthe movement of the center of mass with total massM and the part for therotational energy is given by the rotation of a body with moment of inertiaΘ with angular velocity ω.
We now turn to the angular momentum of rigid body. We consider againa rotation about an axis ~ω through the center of mass ~R. Furthermore we

28 Chapter 3 Kinematics and Kinetics
assume the axis ~ω to be a symmetry axis of the body. The angular momentumis given by
~L =∑
i
mi~ri × ~vi =∑
i
mi~ri × (~ω × ~ri) . (3.87)
In decomposing the vector ~r in a component ~r|| parallel to ~ω and a component~r⊥ perpendicular to ~ω, we obtain for the summand
~r × (~ω × ~r) = (~r⊥ + ~r||)×(
~ω × (~r⊥ + ~r||))
= (~r⊥ + ~r||)× (~ω × ~r⊥)
= ~r⊥ × (~ω × ~r⊥) + ~r|| × (~ω × ~r⊥)
= ~ω(r⊥)2 − ~r⊥(r||ω) . (3.88)
Since we considering the sum of Eq. (3.87), the second term will vanish dueto the body rotate around a symmetry axis. Therefore we can conclude
~L = Θ~ω . (3.89)
with the moment of inertia
Θ =∑
i
mi(r⊥,i)2 . (3.90)
For one particle the formula for the angular momentum coincides with theone previously obtained Eq. (3.63). Like the derivation there, the equationof motion for the rotation of a rigid body is given by
~L = ~M . (3.91)
In real applications we no longer deal with discrete mass points rather thanwith a continuous body. Thus, we make the displacement mi → dmi and∑
→∫
, such that
Θ =
∫
V
(r⊥)2 dm . (3.92)
where the Integral covers the volume V of the considered body. Introducingthe density ρ = dm
dVthis may be rewritten for a constant density as
Θ = ρ
∫
V
(r⊥)2 dV . (3.93)

3.10 Motion of a Rigid Body 29
EXAMPLE As an example we will calculate the moment of inertia of acylinder with radius R, total mass m and height h The density thusreads ρ = m
πR2h. Using polar coordinates and dV = r dr dφ we obtain
Θ =m
πR2h
∫ h
0
dz
∫ R
0
r dr
∫ 2π
0
dφr2 =m
πR2hhR4
42π =
1
2mR2
Furthermore in applications one is often interested in rotations around anaxis which does not go through the center of mass, e.g. when a rigid bodyis put at a fixed axis and therefore the pivot is known to be motionless.By denoting the distance of the axis and a parallel axis through the centerof motion by d, meaning the coordinate regarding the new axis is given by~ri ‘ = ~ri + ~d, we can determine the new moment of inertia:
Θ =∑
i
mi(~r⊥,i ‘)2 =
∑
i
mi(~r⊥,i)2 + d2
∑
i
mi + 2~d∑
i
mi~r⊥,i (3.94)
Since for relative coordinates regarding the center of mass∑
i mi~ri = 0 holds,the last term as a projection of this relation vanishes and we obtain theparallel-axis theorem (Steiner’s theorem):
Θ = ΘCM +Md2 (3.95)
where ΘCM is the moment of inertia with respect to the parallel axis throughthe center of motion.
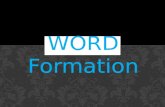
EXAMPLE As an example we derive the equation of motion of a cylinderwith radius R and total mass m on an inclined plane and its accelerationas shown in Fig. 3.4.The torque with respect to the touch point T is given by | ~M | = RFD,
i.e. | ~M | = mgR sin α. The angular momentum regarding this point isfound by the parallel-axis to L = Θω = (ΘCM + mR2)ω. Thus weobtain the equation of motion
mgR sin α = (ΘCM + mR2)ω ⇔ ω =mgR sin α
ΘCM + mR2
The center of mass CM is subsequently subject to an acceleration
a = Rω =mR2
ΘCM + mR2g sin α
Note that since ΘCM = 12mR2 this acceleration a = 2
3g sin α is smaller
than the one of a point mass aPM = g sin α.

30 Chapter 3 Kinematics and Kinetics
CM
T
αFG
FN
FD
Figure 3.4: A cylinder on an inclined plane.
3.11 Summary: Translation and Rotation
At the end of this chapter we conclude with some correspondences betweentranslations and rotations:
Translation ←→ Rotation
Position ~r s = φr Angle φ
Velocity ~v = r v = ωr Angular velocity ω = φ
Force ~F ~M = ~r × ~F Torque ~M
~F = ~p Equation of motion ~M = ~L
Momentum~p = m~v
~L = ~r × ~p Angular momentum~L = Θ~ω
Massm
Θ =∑
k mkr⊥,k2
=∫
ρr⊥2 dV
Moment of inertiaΘ
Total massM =
∑
k mk
ΘO = ΘCM +Md2 Total moment of inertiaΘO =
∑
k ΘO,k
Total Momentum~P =
∑
k ~pk
Total angular momentum~LO =
∑
k~LO,k
Kinetic energyEkin = m
2v2
Rotational energyEr = Θ
2ω2

Chapter 4
Oscillations and Waves
4.1 Simple Harmonic Oscillator
We consider again a body with mass m in one dimension which is attachedto a spring. Therefore the mass is subject to a force F = −Dx. ApplyingNewton’s principle of action (F = mx) we get a (second order and linear)differential equation for x(t)
mx(t) = −Dx(t) . (4.1)
Its general solution, as shown in Fig. 4.1a, reads
x(t) = A cos(ω t + φ) , (4.2)
with the amplitude A and the phase φ to be determined by boundaryconditions (for instance the position and velocity at time t = 0). To provethe solution we put Eq. (4.2) in Eq. (4.1) and get the condition
(mω2 −D) · A cos(ω t + φ) = 0 (4.3)
Therefore the (angular) frequency ω is determined by the spring constantD and the mass:
ω =
√
D
m⇔ T =
2π
ω= 2π
√
m
D(4.4)
This kind of motion is called a harmonic oscillation. It occurs generally,whenever a mass point is subject to a force, whose magnitude is proportionalto the amplitude and points in the opposite direction.An even larger application range can be obtained when looking at a poten-tial V (x): Whenever a mass point is in a stable position of equilibrium x0,

32 Chapter 4 Oscillations and Waves
t
x(t)
(a)
t
x(t)
(b)
Figure 4.1: (a) Harmonic motion appears when a mass point is subject to a forceF = −Dx. (b) Damped oscillation: The amplitude decays like Ae−λt.
meaning V ′(x0) = 0 and V ′′(x0) > 0, the potential V (x) for small deviationsaround x0 may be approximated by a quadratic polynomial V (x) = 1
2Dx2
which then corresponds to a linear force. Thus, for small deviations manyphysical problems can be reduced to a harmonic oscillation.)
4.2 Applications: The Mathematical and the
Physical Pendulum
A mathematical pendulum consists of a mass point m attached to a cord(assumed to be massless) with length ℓ subject to the gravitational force
FG = −mg (see Fig.4.2). We may start from the expression ~L = | ~M | with
L = Θω = mℓ2α and | ~M | = −mgℓ sin α. We obtain the following differentialequation
α(t) = −g
ℓsin(
α(t))
. (4.5)
For small angles α we may approximate sin(α) ≈ α. Consequently the equa-tion of motion reads
α(t) = −g
ℓα(t) (4.6)

4.2 Applications: The Mathematical and the Physical Pendulum 33
ℓα
h
Figure 4.2: The Mathematical pendulum: A mass pony m is attached to a massless cordwith length ℓ.
and we find the solution to be a harmonic oscillation
α(t) = α0 cos(ωt) (4.7)
with the angular frequency
ω =
√
g
ℓ. (4.8)
In contrast the physical pendulum consists of an (arbitrary) body thatcan rotate about an axis A at distance ℓ from the center of mass S (seeFig. 4.3). The body has mass m and a moment of inertia Θ. We start from
the equation of motion for a rigid body | ~M | = L = Θω = Θφ. The torque is
given by | ~M | = −mgℓ sin φ, such that
−mgℓ sin φ = Θφ . (4.9)
Again, for small angles sin φ ≈ φ and we again obtain the common form ofharmonic oscillations
φ +mgℓ
Θφ = 0 . (4.10)
The solution reads φ(t) = φo cos(ωt) with
ω =
√
mgℓ
Θ. (4.11)

34 Chapter 4 Oscillations and Waves
A
S
FG
φ
Figure 4.3: Physical pendulum with moment of inertia Θ with respect to the axis A. Itis AS = ℓ where S denotes the center of mass.
Comparing this with the formula ω =√
g
ℓfor the mathematical pendulum
one may write
ω =
√
g
ℓr
with ℓr =Θ
mℓ(4.12)
with the so called reduced length of the pendulum ℓr.
4.3 Damped Harmonic Oscillator
In a real system there will always be some kind of friction. A common caseto consider would be stokes friction, which occurs for instance when thebody is oscillating in a liquid. In addition to the reset force −Dx we get acontribution −γx, such that the differential equation now reads
mx(t) + γx(t) + Dx(t) = 0 . (4.13)
With the abbreviations
λ =γ
2mand ω =
√
D
m− γ2
4m2(4.14)
the solution is found to be
x(t) = Ae−λt cos(ωt + φ) . (4.15)
which is depicted in Fig. 4.1b. Therefore the amplitude of the oscillationdecays exponentially with time when the object performs a damped har-monic oscillation

4.4 Enforced Oscillations 35
4.4 Enforced Oscillations
We consider now a simple harmonic oscillator (e.g. a mass m attached to aspring with spring constant D) subject to a harmonic (oscillating) externalforce Fext = F0 cos(Ωt). Therefore the equation of motion takes the form
mx(t) = −Dx(t) + F0 cos(Ωt) (4.16)
or x(t) + ω2x(t) =F0
mcos(Ωt) . (4.17)
To solve this equation of motion we make the ansatz:
x(t) = A cos(Ωt) (4.18)
Putting this ansatz in Eq. (4.17) we get
A(−Ω2 + ω2) =F0
m⇔ A =
F0
m
1
ω2 − Ω2. (4.19)
Ω
|A(Ω)|
ω
Figure 4.4: Absolute value |A| of the amplitude in the case of an enforced harmonicoscillation.
Therefore the entire solution is given by
x(t) =F0
m
1
ω2 − Ω2cos(Ωt) . (4.20)
The solution contains the following features:
(i) The body oscillates with the same frequency Ω, which it is forced onby the external force.

36 Chapter 4 Oscillations and Waves
(ii) The amplitude A is strongly dependent on the external frequency Ω andgrows without bound if Ω reaches the natural frequency ω (see Fig. 4.4).This is called the resonant frequency.
(iii) Crossing the resonant frequency ω from below (Ω < ω) involves achange of the sign of A, or in other words a phase shift about π.
4.5 Damped Enforced Oscillations
Now, we will include stokes friction in our considerations. Adding a frictionterm on the right hand side of Eq. (4.16) leads to the equation of motion fora damped enforced oscillation:
mx + γx + mω2x = F0 cos(Ωt) . (4.21)
With the more advanced ansatz
x(t) = A cos(Ωt− φ) (4.22)
and the use of trigonometric formulas the parameters of the ansatz can bedetermined:
A =F0
√
m2(ω2 − Ω2)2 + γ2Ω2and tan φ =
γΩ
m(ω2 − Ω2)(4.23)
Due to the damping the absolute value |A| is now bounded as shown inFig. 4.5 and the phase shift appears smoothly.
Ω
|A(Ω)|
ω
Figure 4.5: Absolute value |A| of the amplitude in the case of an enforced harmonicoscillation with damping.

4.6 Wave Motion 37
4.6 Wave Motion
In order to study the motion of waves, disturbances which travel throughspace and time, we assume a media consisting of mass points with mass min d = 1 dimension and at equilibrium with distance a to each other. Theyare affiliated by springs, each with the same spring constant D (e.g. in adense gas with some linear approximated repulsion/attraction between theparticles). The equation of motion for mass point n, with position un reads
mun = −D(un − un−1) + D(un+1 − un)
= D(un+1 − 2un + un−1) . (4.24)
We are interested in the so called continuum limit, that is a, m→ 0, D →∞with fixed quantities
µ :=m
aand Y := aD . (4.25)
In labeling the viewed mass points by their equilibrium positions x = na andthe definition ∆x := a, we can write
µ∆x un =Y
∆x(u(x + ∆x)− 2u(x) + u(x−∆x)) (4.26)
or
u(x) =Y
µ
(u(x + ∆x)− 2u(x) + u(x−∆x))
(∆x)2(4.27)
If we now consider very dense mass point, that is performing the limit∆x→ 0, the last fraction turns out be the second derivative of u(x, t) withrespect to x at a fixed time t. The equation of motion is therefore expressedas
u(x, t)− Y
µ
∂2u(x, t)
∂x2= 0 . (4.28)
which results with the so called phase velocity c =√
Yµ
in
(
∂2
∂x2− 1
c2
∂2
∂t2
)
u(x, t) = 0 . (4.29)
This equation is called the wave equation since it describes the motion ofwaves. We will consider one special case of solutions, namely the harmonicones
u(x, t) = u0 cos(ωt− kx) (4.30)

38 Chapter 4 Oscillations and Waves
where ω is the angular frequency of the oscillation at position x = 0 thewave number k describes the traveling through space. If we put this ansatzin Eq. 4.29 we obtain a dependency of ω and k, that is
− k2 +ω2
c2= 0 ⇔ ω = ck . (4.31)
The latter equation is called the dispersion relation. These two equations(4.30) and (4.31) state that the maximum of the wave u is traveling withthe phase velocity c, hence its name. The two maxima are separated by thewave length
λ =2π
k=
2πc
ω=
c
f. (4.32)
4.7 Superposition and Interference of Waves
The wave equation is a liner equation, which implies that if u1(x, t) andu2(x, t) are solutions, than
u(x, t) = αu1(x, t) + βu2(x, t) (4.33)
is another solution. Therefore the principle of superposition, we know fromforces, applies to waves, too.In the following, we will consider a fixed position x = 0 where two wavesu1(0, t) = u1(t) = cos(ω1t) and u2(0, t) = u2(t) = cos(ω2t) are present. Thesum u(t) with the aid of cos(a) + cos(b) = 2 cos(a−b
2) cos(a+b
2) is found to be
u(x, t) = cos(ω1t) + cos(ω2t) = 2 cos
(
ω1 − ω2
2t
)
cos
(
ω1 + ω2
2t
)
. (4.34)
The implication of this formula, in the case when both frequencies are close,is shown in Fig. 4.6. Therefore, if two frequencies are added, which arenot much distinguishable from each other, i.e. ω1 ≈ ω2, an oscillation withinanother one is obtained. This is shown in the formula by the first term, whichdescribes the slow oscillating envelope with frequency ωe =
∣
∣
ω1−ω2
2
∣
∣, and thesecond one causing the oscillations within it. This phenomenon is know asbeat and is caused by constructive and reconstructive interference ofthe separate waves.
4.8 Doppler Effect
Moved sourceWe assume a sound source traveling with velocity vs and emitting waves

4.8 Doppler Effect 39
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140
Figure 4.6: Adding two cos-waves with almost the same frequencies leads to beat.
with wavelength λ = c/f towards a detector where the velocity of the waveis denoted by c. Within one period of oscillation T = λ
cthe source travels a
distance of vsT = vsλc. Thus, the detector measures a wavelength
λ′ = λ− vλ
c= λ
(
1− vs
c
)
. (4.35)
With c/f = λ we obtain
f ′ = f1
1− vs
c
. (4.36)
Therefore the sound of the source seems to be brighter when it is movingtowards the detector and darker when it is moving away from it. Note, thatfor vc = c the frequency f ′ becomes infinity. This is called sound barrier.
Moved detectorIf the detector is moved with velocity vd towards a detector and the sourcestays at rest, than the time T ′ needed to pass two consecutive maxima is
T ′ =λ
c + vd
(4.37)
Thus, the frequency f ′ = 1/T ′ the detector measures is given by
f ′ =c
λ
(
1 +vd
c
)
(4.38)
or with f = cλ
f ′ = f(
1 +vd
c
)
. (4.39)


Part II
Classical Electrodynamics

Chapter 5
Electrostatics
5.1 The Electric Charge
Already the Greek philosophers knew that when rubbing two rods of amberon fur the two rods will repel each other. Since the masses of the rods havenot changed, another cause, the electric charge, has to be defined. Asfound by Millikan in 1909, this electric charge is quantized, i.e. every chargeQ can be written as
Q = n · e, with n ∈ Z [Q] = C (5.1)
with the elementary charge
e = 1.602 · 10−19 C . (5.2)
It appears as two different kinds, which are represented by the sign of Q, andfor which holds:
(i) Homonymous charges repel each other.
(i) In-homonymous charges attract each other.
5.2 Maxwell’s Equations
The fundamental laws in classical mechanics are Newton’s axioms (in par-ticular the principle of action). An analog exists in the field of classicalelectrodynamics - the four Maxwell equations, which are heuristic equations(i.e. the can not be derived from some “higher law”). In order to separate
the system from the change which is introduced by measuring it, fields ~E and~B are introduced to describe what kind of force a test charge would notice in

5.2 Maxwell’s Equations 43
the presence of the system. For completeness, we will list the Maxwell’s equa-tions determining these fields and state their meaning while the quantitiestherein will be discussed afterwards:
(1) Gauss’ lawGauss’s law identifies the electric charge as he source of an electric field.Therefore the electric flux
∫
~E d ~A flowing out of a closed surface S isproportional to the electric charge Qin enclosed in the surface:
∮
S
~E d ~A =Qin
ǫ0
with the permittivity of free space
ǫ0 = 8.85 · 10−12 C2
Jm. (5.3)
(2) Gauss’ law for magnetismGauss’ law for magnetism merely states the absence of magnetic mono-poles:
∮
S
~B d ~A = 0
(3) Faraday’s law of inductionFaraday’s law of induction (more generally, the law of electromagnetic
induction) states that a magnetic field ~B changing in time creates aproportional electro-motive force. The relation between the rate ofchange of the magnetic flux through the surface S enclosed by a contourC and the electric field along the contour reads:
∮
C
~E d~ℓ = − d
dt
∫
S
~B d ~A
(4) Ampere’s lawAmpere’s law, discovered by Andree-Marie Ampere, relates the mag-netic field in a closed loop C to the electric current I = dQ
dtpassing
through the area S enclosed by the loop. It is the magnetic equivalentof Faraday’s law of induction:
∮
C
~B d~ℓ = µ0I +d
dt
∫
S
~E d ~A
with the magnetic constant or the permeability of vacuum
µ0 = 1.26 · 10−6 J
A2m. (5.4)

44 Chapter 5 Electrostatics
5.3 The Electric Field - Coulomb’s Law
In the following, we want to derive the electric field ~E which is defined bythe force per test charge q:
~E =~F
q[E] =
N
C=
V
m(5.5)
at first for a point charge Q. From Gauss’ law this field at a distance r canbe calculated when considering a sphere centered around that point charge(see Fig. 5.1). Due to the symmetry, the electric field is constant along thesphere and can therefore be calculated by
∮
S
~E d ~A = ~E · 4πr2~r =Q
ǫ0or E =
1
4πǫ0
Q
r2. (5.6)
+
Figure 5.1: Cut through the spherical electric field of a positive point charge and asphere where the electric field is constant.
This leads to the force between two elementary charges qi = Ziei withZi = ±1 and i = 1, 2 as
~F12 = q2~E1 =
1
4πǫ0
q1q2
|~r1 − ~r2|3(~r1 − ~r2) or F12 =
1
4πǫ0
q1q2
(r12)2(5.7)
where r12 = |~r1−~r2| states the distance between the two charges. This result,known as Coulomb’s law, is in analogy to the gravitational force betweentwo mass points with masses m1 and m2.

5.4 Electric Potential, Voltage and Work in an Electric Field 45
+ + + + + + + + + + +
−−−−−−−−−−−
Figure 5.2: Homogeneous Electric Field between two plates with charge ±Q, separatedby a distance d.
Now we consider two plates with area A, separated by a distance d, eachcarrying a charge density σ = ±Q
A(see Fig. 5.2). In order to calculate
the electric field between the plates we make again use of the first Maxwellequation.
∮
S
~E d ~A = EA =Q
ǫ0⇔ E =
σ
ǫ0. (5.8)
Thus, we obtain a homogeneous (i.e. constant in space) electric field whichcorresponds to a homogeneous force
|~F | = q| ~E| = qσ
ǫ0
(5.9)
and therefore a motion with constant acceleration.
5.4 Electric Potential, Voltage and Work in
an Electric Field
When describing an electric force it is often easier to use the scalar electricpotential φ instead of the vector of the electric field. It is defined by
φ(~r) = −∫
~E d~r . (5.10)

46 Chapter 5 Electrostatics
In applications, however, the derived quantity voltage is used, which isdefined by the difference of the potential at two points ~r1 and ~r2:
U = ∆φ = φ(~r2)− φ(~r1) [U ] = V (5.11)
Since the definition of the electric potential is similar to the one of work thelatter one is given by
W =
∫ ~r2
~r1
~F d~r = q
∫ ~r2
~r1
~E d~r = qU . (5.12)
EXAMPLE We reconsider the two plates in Fig. 5.2 and determine theelectric field between them as well as the work connected to the trans-port of charges between the plates.Integrating the constant electric field E = σ
ǫ0yields
∫ d
0
E dx = Ed = U ⇔ E =U
d. (5.13)
Therefore the electric field between two parallel plates can be expressedas a ratio of the voltage between them to their distance d. The workwhich is gained/needed when an electric charge is transported from oneplate to the other can simply be expressed in case of a homogeneousfield as
W = qU = qEd . (5.14)
5.5 Application: Motion in a Homogeneous
Electric Field
We consider a particle of mass m and charge q, which is accelerated due toan (acceleration) voltage U0. During this process the particle gains kineticenergy, i.e.
qU0 =1
2mv2 ⇔ v =
√
2qU0
m. (5.15)
Afterwards the particle enters a parallel plate capacitor charged by anothervoltage U as depicted in Fig. 5.3. Due to the electric field the particle isaccelerated only in y-direction. With a = F
m= qE
m= qU
mdthe motion is
described as
~r(t) =
(
x(t)y(t)
)
=
(
vtqU
2mdt2
)
. (5.16)

5.6 Capacity 47
y
x
+ + + + + + + + + + +
−−−−−−−−−−−
Figure 5.3: If a charged particle enters a parallel plate capacitor it is accelerated in they-direction. The particle’s path forms a parabola.
If we are only interested in the geometrical path we can solve x = vt fort = x/v. If we put this in y(t) we get
y(x) =1
2
qU
mdv2x2 . (5.17)
5.6 Capacity
The capacity is defined as the quotient of charge and voltage:
C =Q
U[C] = F (5.18)
In the case of the two parallel plates of size A which are at distance d, weobtain
C =Q
U=
σA
Ed= ǫ0
A
d. (5.19)
Imagine now that the capacitor is discharged by bringing small amountsof charge to the other side. Since the voltage will change in this processaccording to the definition of the capacity the total work is given by
W =
∫
dW =
∫
UdQ =
∫
Q
CdQ =
1
2
Q2
C=
1
2CU2 . (5.20)
For a parallel plane capacitor this can be expressed by the electric field:
W =1
2ǫ0
A
d(Ed)2 =
1
2V ǫ0E
2 (5.21)

48 Chapter 5 Electrostatics
where V denotes the volume where the electric field is present. This meansthe energy density is proportional to the electric field squared, which can bederived generally, too.
5.7 Matter in an Electric Field
We reconsider the parallel plate capacitor. Putting a dielectric material be-tween the plates causes an increase in the capacitance with proportion factorǫr, the relative permittivity of the material:
ǫr =Cr
C⇔ Cr = ǫrǫ0
A
d. (5.22)
This happens because an electric field polarizes the molecules of the dielectricor orientated existing polar regions (dipoles), producing concentrations ofcharge on its surfaces that create an electric field opposed (anti-parallel) tothat of the capacitor. Therefore, a given amount of charge produces a weakerfield Er between the plates than it would without the dielectric E = ǫrEr,with ǫf > 1. This reduces the electric potential, too. Considered in reverse,this argument means that, with a dielectric, a given electric potential causesthe capacitor to accumulate a larger charge.

Chapter 6
Electric Direct Current
6.1 Electric Current
As a simple model for the electric current we consider a conductor, which hasa density of charge carriers (i.e. electrons with mass m = me) n. We want towrite down the equation of motion for one of this carriers if it is exposed toan electric field E. This particular electron will make collisions with all theother electrons. The time between two collisions will be denoted by τ . Thesecollision processes effectively lead to a friction force, which we will model asStokes’s friction γv = m
τv. Thus, the equation of motion takes the form
mv(t) = eE − m
τv(t) . (6.1)
A static (time independent) solution of this problem is given by
v =eτ
mE . (6.2)
This is the velocity of one carrier. The total velocity of all carriers is vtot = nv.Thus the electric current density reads
j = evtot =ne2τ
mE = σ E (6.3)
where we defined the conductivity
σ =ne2τ
m. (6.4)
If we are dealing with a homogeneous conductor with length ℓ and crosssection A Eq. 6.4 may be integrated to yield:
∫
j dA = jA = I and
∫
E dℓ = Eℓ = U (6.5)

50 Chapter 6 Electric Direct Current
Thus
U =ℓ
σAI = R I . [I] = A (6.6)
This relation is known as (the famous) Ohm’s law. We defined the resis-tivity
R =1
σ
ℓ
A= ρs
ℓ
A[R] = Ω (6.7)
with the so called specific resistance ρs = 1σ.
6.2 Kirchhoff’s Rules
In electric circuits one often deals with several connected conductors. To cal-culate for instance the individual currents and voltages or the total resistivityof the system Kirchhoff’s rules provide a very useful tool.
(i) Kirchhoff’s current lawSince the electric charge is conserved, at any point in an electricalcircuit the charge density does not change with time. Therefore the sumof currents flowing towards that point is equal to the sum of currentsflowing away from that point:
∑
k
Ik = 0 (6.8)
(ii) Kirchhoff’s voltage lawFrom energy conservation follows, that the directed sum of the electricalpotential differences around a circuit must be zero:
∑
k
Uk = 0 (6.9)
From there one can e.g. find the rules for the series connection and theparallel connection of resistors (see Fig. 6.1). One finds
(i) Series connection
R =∑
k
Rk (6.10)

6.3 Electric Work and Power 51
(ii) Parallel connection
R =1
∑
k1
Rk
(6.11)
(i)
R1
R2
(ii)
R2 R1
Figure 6.1: Series (i) and parallel (ii) connection of two resistors.
For capacitances the following rules hold
(i) Series connection
C =1
∑
k1
Ck
(6.12)
(ii) Parallel connection
C =∑
k
Ck (6.13)
6.3 Electric Work and Power
We consider again a conductor with resistance R on which ends a voltageU is applied and through which therefore flows a current I. In it energy isdissipated, given by
P =dW
dt= U
dQ
dt= UI . (6.14)
Taking into account Ohm’s law, i.e U = RI this may be rewritten as
P = UI =U2
R. [P ] = W (6.15)

Chapter 7
Electromagnetism
7.1 The Magnetic Field
In the 13th century new navigational instruments were invented using ma-terials which orientate themselves along a certain direction. Since they werenot electric charged another field has to be introduced in order to explainthe observed force. This magnetic field B as shown by Ampere’s law arisesfrom moving charges.Consider a long wire which carries a current I. By reason of symmetry andon the basis of the second maxwell equation
∫
S~B d ~A = 0 the magnetic field
has only a tangential component. This can be calculated by the static caseof the fourth Maxwell equation (Ampere’s law):
∫
C
~B d~ℓ = B 2πr = µ0I ⇔ B =µ0I
2πr, [B] = T (7.1)
In order to find the magnetic field inside a coil with length ℓ and numberof turns N we again make use of Ampere’s law. The left hand side of thisequation yields Bℓ and for the right hand side we get µ0NI. Thus, themagnetic field of a coil is given by
B = µ0N
ℓI . (7.2)
Thus, we obtain a homogeneous magnetic field inside a coil.
7.2 Lorentz Force
The Lorentz force is the force exerted on a charged particle in an electro-magnetic field. Due to the electric field, the particle will experience a force

7.3 Magnetic Flux and Magnetic Induction 53
of q ~E, and due to the magnetic field one of magnitude q~v × ~B. Combinedthey give the Lorentz force equation:
~FL = q( ~E + ~v × ~B) (7.3)
EXAMPLE We will now consider the motion of a particle with mass mand charged by q in a homogeneous magnetic field ~B perpendicular tothe initial velocity of magnitude v.Since the Lorentz force is perpendicular to the direction of the mag-netic field the velocity stays perpendicular to it. Therefore the particleis moving on a circle where the Lorentz force FL = qvB acts as thecentrifugal force The radius of this circle is determined by
qvB =mv2
r⇔ r =
mv
qB. (7.4)
When a wire which is placed in a magnetic field B perpendicular to thedirection of its carrying current I the charge carriers will perform similarmotions and collide with the atoms of the wire. Thereby the Lorentz forceis transfered to a force F acting on the whole wire. Is is determined by
F = IℓB . (7.5)
EXAMPLE Consider a region of space between the plates of a capacitorwhere there is an electric field and a perpendicular magnetic field. Showthat this is a velocity selector.Imagine a particle of charge q which enters this space from the left. Ifq is positive, the electric force of magnitude qE points down and themagnetic force of magnitude qvB points up. If the charge is negative,each of these two forces is reversed. The forces balance only for onegiven velocity:
qE = qvB ⇔ v =E
B. (7.6)
7.3 Magnetic Flux and Magnetic Induction
In order to characterize the magnetic field by one scalar value, the magneticflux Φ is defined via
Φ =
∫
~B d ~A = BA, [Φ] = Wb (7.7)

54 Chapter 7 Electromagnetism
where the last equality holds only for a homogeneous field. Thus, Maxwell’sthird equation (Faraday’s law of induction) may be rewritten as
∫
C
~E d~ℓ = − d
dt
∫
S
~B d ~A = −Φ . (7.8)
Since the left hand side of this equations is a voltage we finally obtained theinduced voltage
Uind = −Φ . (7.9)
7.4 Self-Inductance
We consider an empty coil with
B = µ0N
ℓI . (7.10)
If the current I through the coil changes with time we get an induced voltage
Uind = − d
dt(BA)N = − d
dt
(
Aµ0N
ℓIN
)
= −(
µ0AN2
ℓ
)
I . (7.11)
If we define the inductance to be
L = µ0AN2
ℓ, [L] = H (7.12)
we get
Uind = −LI . (7.13)
The last equation is Lenz’s law:
The induced current produced in the conductor always flows in such a direc-tion that the magnetic field it produces will oppose the change that producesit.
7.5 Matter in a Magnetic Field
Like in the case of the electric field, the magnetic field induces or orientatesmagnetic moments within matter. The resulting change of the strength ofthe magnetic field is characterized by the relative permeability
µr =Br
B(7.14)

7.6 Applications: Electromagnetic Machines 55
where Br is the magnetic field in the presence of matter and B withoutit. However, materials exhibit quite different reactions in the presence of amagnetic field. They are sorted in the following categories:
• In diamagnetic materials magnetic moments are induced. From Lenz’slaw they are therefore orientated in a way that the external magneticfield is weakened. Thus, the relative permeability possesses small values0 < µr < 1.
• Paramagnetism is observed if existing magnetic moments within mat-ter only influence each other very weakly. Since the moments are notinduced, it is favorable to align them with the external field. Thereforethe external field is enhanced and therefore the relative permeabilityµr > 1 is obtained.
• Ferromagnetic matter, like iron, will keep the magnetic field afterthe external one is not present any more. That means they possesmagnetic moments of their own, too. But the strong coupling betweenthem prevent the magnetic field to vanish again. However, if the ap-plied magnetic field is very weak, the process can still be reversed andEq. (7.14) can be applied. In this case their relative permeability isvery large µr ≫ 1 (e.g. µr,iron ∼ 5000).
7.6 Applications: Electromagnetic Machines
In this section we will consider some important examples for application,namely the electric motor, electric generator and the transformer.
Electric generatorWe consider a rectangular coil of N turns and with area A in an uniformmagnetic field B. In the simplest picture of a generator this rectangular coilis now (due to an external force) rotated with angular velocity ω. Thus, theeffective flux through the rectangular coil is Φ = NBA cos(ωt) and we getfor the induced voltage
U(t) = −Φ = NBAω sin(ωt) . (7.15)
Thus the generator converts mechanical energy into electric energy. How-ever, in contrast to the kind of voltage discussed in chapter 6, the voltageobtained varies harmonic with time. Its corresponding current is therefore analternating-current (AC). In order to characterize it usually the frequencyand the rms-value of the voltage is stated. The latter quantity is defined as

56 Chapter 7 Electromagnetism
the voltage which would give the same power dissipation at a resistor. For aharmonic time-dependence this differs from the maximum voltage only by afactor 1/
√2. For the generator we obtain
Urms =NBAω√
2. (7.16)
Electric motorTo convert electric energy into mechanical energy we have to apply an exter-nal AC-voltage to the coil, i.e.
Uext = U0 sin(ωt) . (7.17)
Due to that external AC-voltage the coil will rotate with angular velocity ω.
EXAMPLE As an example we want to determine the angular velocityω of an electric motor without load when applying an AC-voltageUext = U0 cos(Ωt) as well as the magnetic field B necessary. The motorconsists of a quadratic frame with edge length ℓ inside the magneticfield B.If the frame would rotate inside the external magnetic field the fluxthrough it would be given by
Φ = Bℓ2 sin(α)
where α is the angle between the (edges of the) frame and the magneticfield. Kirchhoff’s voltage law states therefore
U0 cos(Ωt) = Uext = −Uind = Φ = Bℓ2α cos(α)
This equation is fulfilled for a motion with constant angular velocityω = α = Ω and if the magnetic field matches the applied voltage
B = U0
Ωℓ2.
TransformerIf a time-varying voltage UP is applied to the primary winding of NP turns, acurrent will flow in it producing a magneto-motive force. Just as an electro-motive force drives current around an electric circuit, so does the magneto-motive force an magnetic flux through a magnetic circuit. The primarymagneto-motive force produces a varying magnetic flux ΦP in the core, andinduces a back electro-motive force in opposition to UP in the secondarycircuit. In accordance with Faraday’s law of induction, the voltage induced

7.6 Applications: Electromagnetic Machines 57
across the primary and secondary winding is proportional to the rate ofchange of flux:
UP = NP
dΦP
dtand US = NS
dΦS
dt(7.18)
where
• UP and US are the voltages across the primary winding and secondarywinding.
• NP and NS are the numbers of turns in the primary winding and sec-ondary winding.
• dΦP /dt and dΦS/dt are the derivatives of the flux with respect to timeof the primary and secondary winding.
Saying that the primary and secondary windings are perfectly coupled isequivalent to saying that ΦP = ΦS. Substituting and solving for the voltagesshows that:
UP
US
=NP
NS
(7.19)
Hence in an ideal transformer, the ratio of the primary and secondary voltagesis equal to the ratio of the number of turns in their windings, or alternatively,the voltage per turn is the same for both windings. The ratio of the currentsin the primary and secondary circuits is inversely proportional to the turnsratio. This leads to the most common use of the transformer: To convertelectrical energy at one voltage to energy at a different voltage by meansof windings with different numbers of turns. In a practical transformer, thehigher-voltage winding will have more turns and smaller conductor cross-section, than the lower-voltage windings.

Chapter 8
Electric Oscillations andElectric Waves
8.1 The RL-Circuit
An AC through a coilWe consider a coil which is directly connected to an alternating currentI(t) = I0 sin(ωt). From the definition of the self-inductance we obtain thevoltage as
U = LI = LI0ω cos(ωt) (8.1)
Therefore the voltage obtains its maximum one quarter of the period beforethe current. We say the current follows the voltage by 90, and in analogyto Ohm’s resistance the inductive reactance
XL =U0
I0
=Urms
Irms
= ωL (8.2)
is defined.
Opening of an RL-Circuit (Discharging)Now, we add a resistor to the circuit and consider a DC-source (see Fig. 8.1a).In the first case, we assume that the upper switch S in Fig. 8.1a is opened (re-spectively the lower switch S ′ is closed) at time t = 0, i.e. the voltage sourceis disconnected from the circuit, but an initial current I0 remains. Kirch-hoff’s voltage law in combination with the definition of the self-inductanceand Ohm’s law states for this case
0 = I(t)R + LI(t) . (8.3)

8.1 The RL-Circuit 59
S
S ′
L
R U0
(a)
S
S ′
C
R U0
(b)
Figure 8.1: (a) RL-circuit and (b) RC-circuit.
The solution with I(0) = I0 reads in this case
I(t) = I0e−R
Lt . (8.4)
EXAMPLE In order to determine the energy stored in a coil with self-inductance L, N turns and length ℓ, through which initially a currentI0 flows, we consider the coil connected to a resistor R.Since the time dependent power dissipated at the resistor amounts to
P (t) = UR(t)I(t) = R(
I(t))2
= RI02e−2R
Lt
the total energy that is dissipated can be calculated by
EI =
∫
P (t)dt = RI02
∫ ∞
0
e−2RL
tdt = RI02 L
2R
∫ 0
−∞
et′dt′ =1
2LI0
2
where the substitution t′ = −2RLt was performed to evaluate the inte-
gral. Since initially only a magnetic field B = µ0NℓI0, generated by the
coil, was present this energy has to be stored in the magnetic field. Wecan connect the energy directly to the stored magnetic field by
EB = EI =1
2LI0
2 =1
2· µ0
N2A
ℓ· B2ℓ2
µ2N2=
1
2
V
µ0B2
where in the last step the volume V where the magnetic field is presentwas introduced.

60 Chapter 8 Electric Oscillations and Electric Waves
Closing of an RL-Circuit (Charging)Now, we change the position of the switches, i.e. the DC-voltage source isconnected to the circuit. Therefore Kirchhoff’s voltage law states with thedefinition of the self-inductance and Ohm’s law:
U0 = I(t)R + LI(t) (8.5)
The solution for I(0) = 0 of this differential equation is given by
I(t) =U0
R
(
1− e−RL
t)
. (8.6)
8.2 The RC-Circuit
An AC through a capacitorAt first, we consider a capacitor which is directly connected to an AC-voltageU(t) = U0 sin(ωt). From the definition of the capacity we get the current
I = CU = CU0ω cos(ωt) . (8.7)
Therefore the voltage follows the current by 90 and the capacitive reac-tance
XC =U0
I0=
Urms
Irms=
1
ωC(8.8)
can be defined in analogy to Ohm’s resistance.
Opening of an RC-Circuit (Discharging)Now, we consider the right circuit in Fig. 8.1, where a capacitor is discon-nected from a DC-voltage source, but can discharge via a resistor R. FromKirchhoff’s voltage law we get with Ohm’s law and the definition of thecapacity with I = −Q:
1
CQ(t) + RQ(t) = 0 (8.9)
The solution to this homogeneous differential equation with Q(0) = Q0 isgiven by
Q(t) = Q0e− t
RC . (8.10)
This states an exponential decay with time constant τ = RC.

8.3 Electric Resonant Circuits 61
Closing of an RC-Circuit (Charging)Finally, we consider a closed switch S where a capacitor is charged by aDC-voltage source via a resistor R. Kirchhoff’s voltage reads now
U0 = RQ(t) +1
CQ(t) . (8.11)
The solution of this equation with Q(0) = 0 is given by
Q(t) = CU0
(
1− e−t
RC
)
. (8.12)
8.3 Electric Resonant Circuits
An RLC circuit (also known as a resonant circuit or a tuned circuit) is anelectrical circuit consisting of a resistor (R), an inductor (L), and a capaci-tor (C), connected in series or in parallel. We will consider only the seriesconnection. Since the total voltage amounts to be zero and with I = Q weobtain
0 =Q
C+ RI + LI =
1
CQ + RQ + LQ . (8.13)
This equation is analogous to the mechanical equation for damped oscillationsDx + γx + mx = 0 if one makes the following replacements:
x↔ Q m↔ L γ ↔ R D ↔ 1
C(8.14)
We will first consider the case R = 0. Eq. (8.13) simplifies to
1
CQ(t) + LQ(t) = 0 . (8.15)
Since differential equation for Q(t) describes a harmonic oscillation it has thesolution
Q(t) = Q0 sin(ωt + φ0) with ω =1√LC
. (8.16)
For the general case (i.e. R 6= 0) we can take once the time derivative ofEq. (8.13) to obtain
0 =1
CI(t) + RI(t) + LI(t) . (8.17)

62 Chapter 8 Electric Oscillations and Electric Waves
As discussed in sect. 4.4 the solution (for R2 < 4LC
) is given by
I(t) = Ae−γt cos(ωt + φ) with ω =
√
1
LC− R2
4L2, γ =
R
2L. (8.18)
In this solution the magnetic field inside the coil and the electric field insidethe capacitor are oscillatory generated while the other field is annihilated.Similar to the discussion in sect. 4.6 such an oscillatory disturbance willpropagate in space. Therefore this device can be used to radiate electro-magnetic waves.
In order to compensate the losses by the resistor an additional AC-sourceU0 with frequency Ω can be put in series into the circuit. Then the systemwould correspond to the damped enforced oscillation discussed in section 4.5.The phase shift between the applied voltage and the current in the systemcan then be expressed by the effective resistances
tanφ =XL −XC
R(8.19)
while the solution for the current is given by
I =U0
Zcos(Ωt− φ) (8.20)
with the impedance
Z =√
(XL −XC)2 + R2 . (8.21)
8.4 Summary: Electronics
Resistor Capacitor Inductor
Connection to thevoltage
R = UI
C = Q
UL = |U |
|I|
Connection to geom-etry
R = ρsℓA
C = ǫ0ǫrAd
L = µ0µrN2A
ℓ
Series connection Rtot =∑
k Rk1
Ctot=∑
k1
CkLtot =
∑
k Lk
Parallel connection 1Rtot
=∑
k1
RkCtot =
∑
k Ck1
Ltot=∑
k1
Lk
Reactance in an AC-circuit
R XC = 1ωC
XL = ωL
Energy (DC-case)dissipated / stored
WR = 1RU2 t WC = 1
2CU2 WL = 1
2LI2
Energy density ofthe generated fields
wC = 12ǫ0ǫrE
2 wL = 12
1µ0µr
B2

![ΧΟΝΔΡΟΔΙΝΗ ΑΝΤΙΓΟΝΗcore.ac.uk/download/pdf/132823591.pdf09/12/2017 10:21:05 EET - 137.108.70.7 [4] ABSTRACT The meaning of economic crisis stems from the theory of](https://static.fdocument.org/doc/165x107/60781f155748de4472714001/-coreacukdownloadpdf-09122017-102105.jpg)