CINEMÁTICA DEL CUERPO RIGIDO
22
CURSO:DINÁMICA DOCENTE: Ing.MENACHO LOPEZ Víctor Manuel TEMA :Cinemática del Cuerpo Rígido INTEGRANTES: ATALAYA RIMAC Jeidy CADILLO REGALADO Laura CHINCHAY POMA Gianina GUZMÁN ROSALES Rocío MAGUIÑA ROSALES Katherine ROMERO FLORES Jesús ROSALES CARO Michel SÁENZ JAMANCA Kelly
-
Upload
kelly-saenz-jamanca -
Category
Documents
-
view
66 -
download
0
description
DINAMICA
Transcript of CINEMÁTICA DEL CUERPO RIGIDO
CURSO:DINÁMICA
DOCENTE: Ing.MENACHO LOPEZ Víctor Manuel
TEMA :Cinemática del Cuerpo Rígido
INTEGRANTES:
ATALAYA RIMAC Jeidy
CADILLO REGALADO Laura
CHINCHAY POMA Gianina
GUZMÁN ROSALES Rocío
MAGUIÑA ROSALES Katherine
ROMERO FLORES Jesús
ROSALES CARO Michel
SÁENZ JAMANCA Kelly
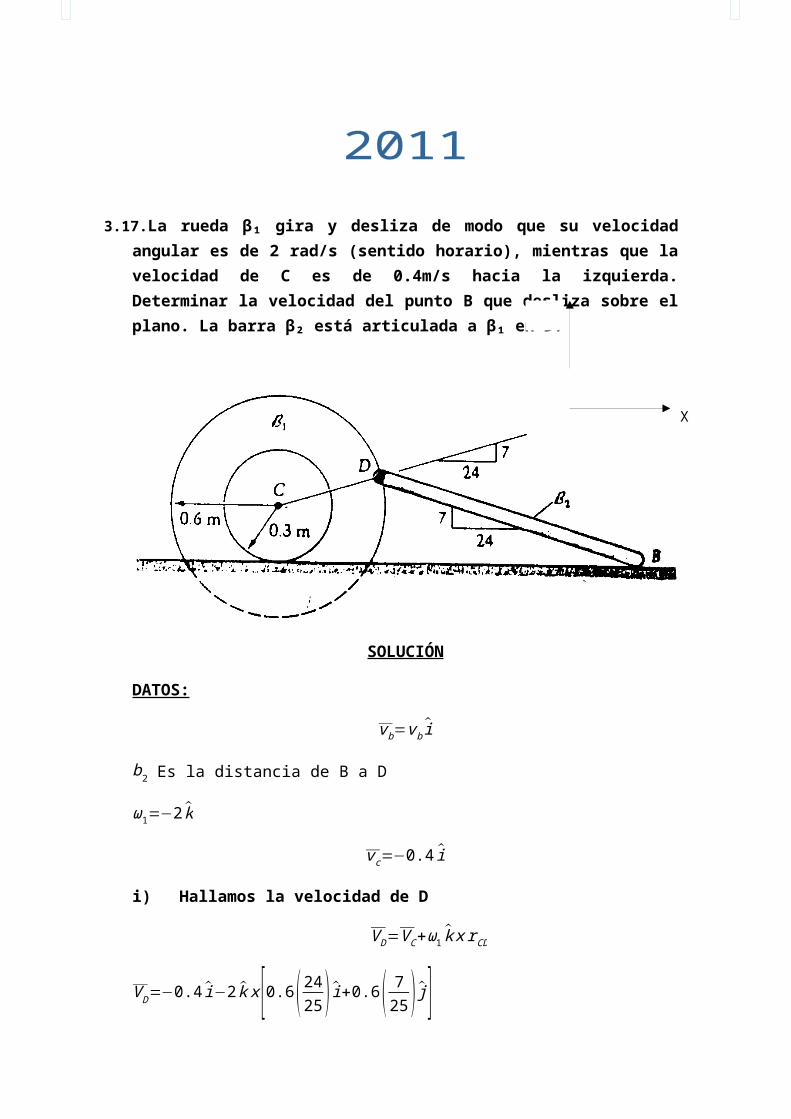
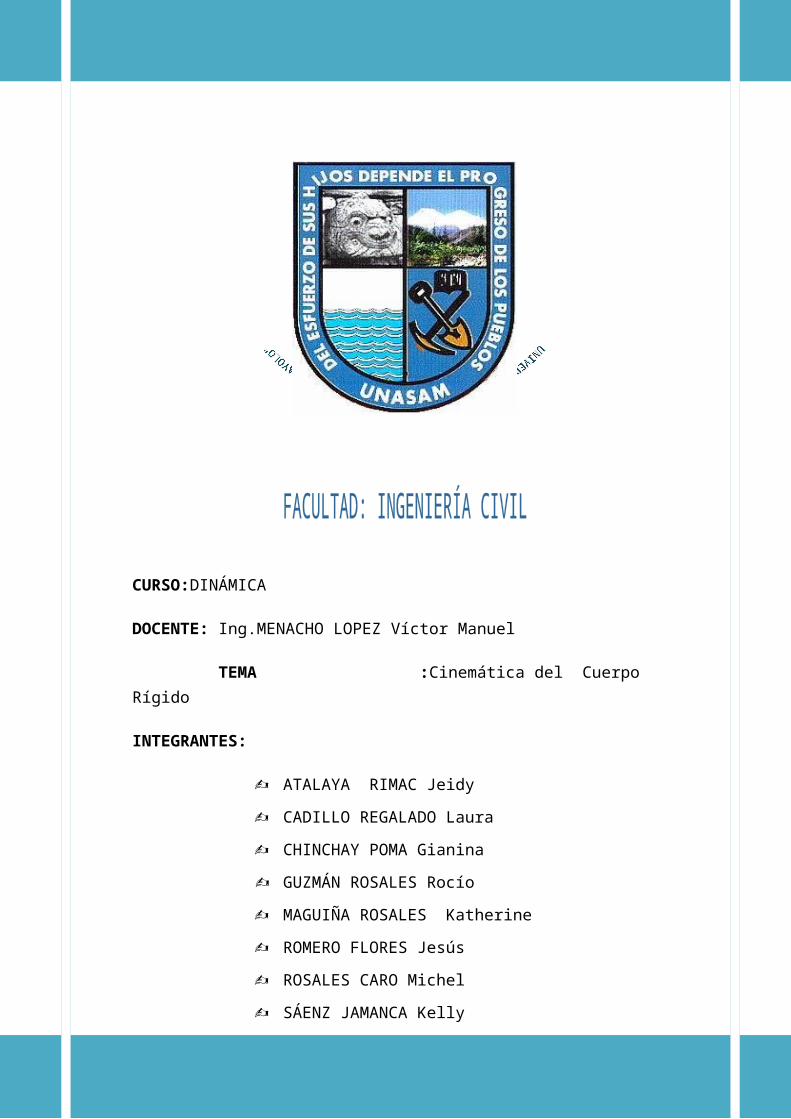
3.17.La rueda β₁ gira y desliza de modo que su velocidad angular es de 2 rad/s (sentido horario), mientras que la velocidad de C es de 0.4m/s hacia la izquierda. Determinar la velocidad del punto B que desliza sobre el plano. La barra β₂ está articulada a β₁ en D.
SOLUCIÓN
DATOS:
vb=vb i
b2 Es la distancia de B a D
ω1=−2 k
vc=−0.4 i
i) Hallamos la velocidad de D
V D=V C+ω1 k x rCD
V D=−0.4 i−2 k x [0.6( 2425 )i+0.6 ( 725 ) j ]V D=−0.4 i−1.152 j+O .336 i
V D=−0.064 i−1.152 j
ii) Hallamos la velocidad de B
V B=V D+ω2 k x rDB
Y
X

V B=−0.064 i−1.152 j+ω2 k x [b2( 2425 ) i−b2( 725 ) j ]V B=−0.064 i−1.152 j+ω2b2( 2425 ) j+ω2b2( 725 ) i
V B=( 7ω2b225
−0.064) i−( 24ω2b225
−1.152) jiii) Como observamos en la figura la velocidad de B (V B¿ solo tiene
componente en x
ω2b2(2425 ) – 1.152¿0
ω2b2=1.2
iv) Remplazamos
V B=( 7 (1.2)25−0.064 )i
V B=0.272 i
3.42.Las barras β1 y β2 están articuladas en B y se mueven en un plano vertical con las velocidades angulares constantes. Localiza el centro instantáneo de β2 ,para la posición dada y úselo para encontrar la velocidad del punto C. Revise luego el valor obtenido V C (en β2) relacionando a ésta con la velocidad de B. Note que a
veces es muy tedioso localizar el centro instantáneo.
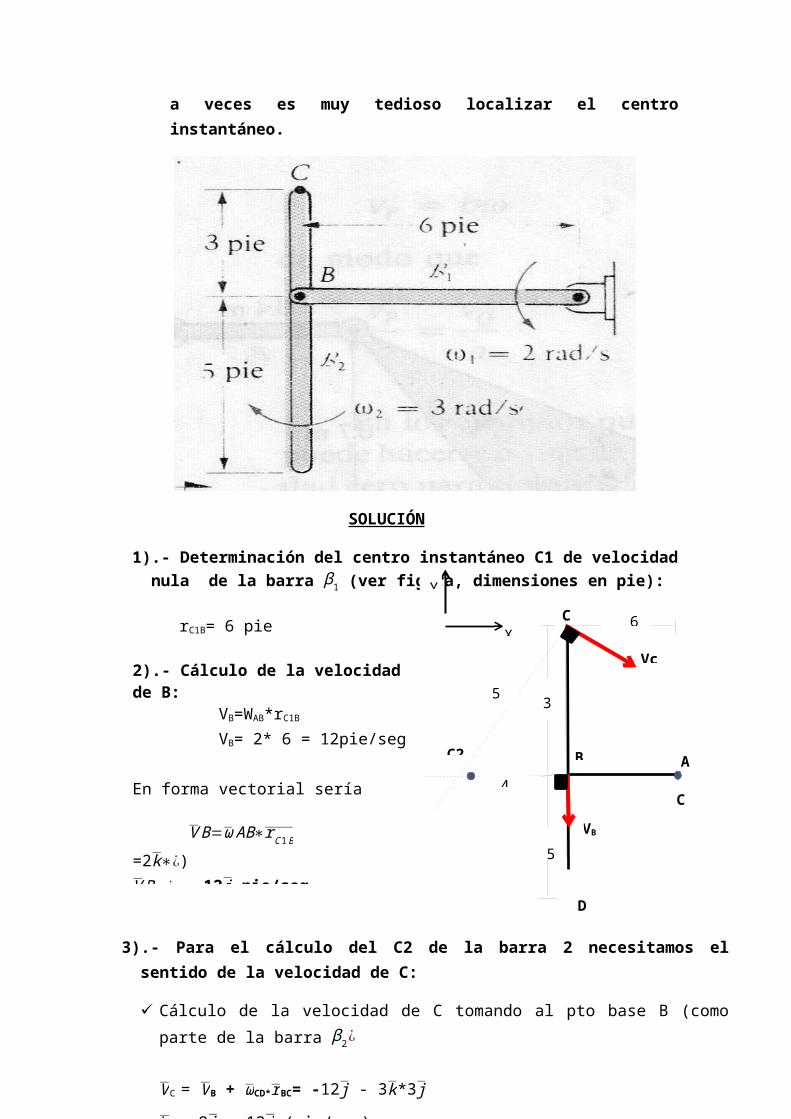
SOLUCIÓN
1).- Determinación del centro instantáneo C1 de velocidad nula de la barra β1 (ver figura, dimensiones en pie):
rC1B= 6 pie
C11
C
B
3
5
6
D
A
2).- Cálculo de la velocidad de B: VB=WAB*rC1B
VB= 2* 6 = 12pie/seg
En forma vectorial sería
V B=ω AB∗rC 1B=2k∗¿) V B=¿ - 12 j pie/seg
3).- Para el cálculo del C2 de la barra 2 necesitamos el sentido de la velocidad de C:
Cálculo de la velocidad de C tomando al pto base B (como parte de la barra β2¿
V C = V B + ωCD*rBC= -12 j - 3k*3 j
V c =9i - 12 j (pie/seg)
4 ¿Trazamosuna línea perpendicular ala direccióndeV c ,de igual
manera trazamos unalínea perpendicular aV B, el punto de intersección es C2.
Hallamos la velocidad de B con el centro instantáneo C2.VB= WCD*rC2B
12=3*rC2B
VB
C2
Vc
4
5
XX
Y
3.67.La manivela β1 está articulada a la barra β2 ; el otro extremo de β2 resbala sobre un plano parabólico y está en el origen en la posición mostrada. La velocidad angular de β1 es de 3 rad/s en sentido horario =constante. Determine la aceleración de A y la aceleración angular de β2 en el instante dado. Sugerencia: el radio de curvatura ρ de una curva plana y=y(x) puede calcularse con la formula:
1ρ= y
¿¿¿
Use este resultado para calcular la componente normal de a A.
3).- Para el cálculo del C2 de la barra 2 necesitamos el sentido de la velocidad de C:
Cálculo de la velocidad de C tomando al pto base B (como parte de la barra β2¿
V C = V B + ωCD*rBC= -12 j - 3k*3 j
V c =9i - 12 j (pie/seg)
4 ¿Trazamosuna línea perpendicular ala direccióndeV c ,de igual
manera trazamos unalínea perpendicular aV B, el punto de intersección es C2.
Hallamos la velocidad de B con el centro instantáneo C2.VB= WCD*rC2B
12=3*rC2B
5).- Cálculo de la velocidad de C como parte de la barra β2 VC=WCD*rC2C
VC= 3* 5= 15pie/seg

SOLUCIÓN
i) Relacionando las velocidades de P y O sobre el cuerpo β1:
V P= V O+ ωk x rop
V P=0+ (-3)k x (-0.5i)
V P= 1.5 j
ii) Relacionando las velocidades de A y P sobre el cuerpo β2:
V A= V P+ ω2 k x r PA
V A= 1.5 j+ ω2 k x (-1.5i-0.8 j)
V A i= 1.5 j -1.5ω2 j+ 0.8ω2 i
Igualando componentes:
Componente i:V A= 0.8ω2 ………………………. (*)
Componente j:1.5 = 1.5ω2
ω2= 1rad/s
Reemplazando en (*):
V A= 0.8 * (1)
V A= 0.8m/s
iii)Relacionando las aceleraciones de P y O sobre el cuerpo β1:
aP= aO+ αk x rop- ω2r op
aP= 0 + 0k x rop- (−3 )2(−0.5 i)
aP= 0 + 4.5i
aP= 4.5i rad/s2
iv) Relacionando las aceleraciones de A y P sobre el cuerpo β2:
aP= a A+ α 2 k x r Ap- ω22rAp

aP= SA e t + s2
ρen + α 2 k x (1.5i+0.8 j) - (1 )2 (1.5i+0.8 j)….. (**)
v) Calculamos radio de curvatura de A:
Y=
X2
4Y
=
X2Y
=
12
1ρ= y
¿¿¿
Aplicando la formula tenemos:
ρ = 2(1+ x2
4¿¿3/2
Para el instante de interes x = 0:
ρ = 2(1+ 02
4¿¿3 /2
ρ = 2m
Siendo las direcciones de e t y en:
e t = i
en = j
vi)Reemplazando en (**) tenemos:
4.5i = SA i + (0.8)2
4j + α 2 k x (1.5i+0.8 j) - (1 )2 (1.5i+0.8 j)
4.5i = SA i + 0.32 j +1.5α 2 j - 0.8α 2 i - 1.5i – 0.8 j
4.5i = (SA- 0.8α 2- 1.5)i + (0.32+1.5α 2– 0.8) j
e t

Igualando componentes:
Componente i: SA- 0.8α 2- 1.5 = 4.5
SA = 6 + 0.8α 2 ………………………… (***)
Componente j: 0.32+1.5α 2– 0.8 = 0
α 2=0.32 rad/s2
Reemplazando en (***) :
SA = 6 + 0.8 * (0.32)
SA = 6.256 m/s2
Por tanto tenemos:
a A = 6.256i + 0.32 j
α 2=0.32 rad/s2
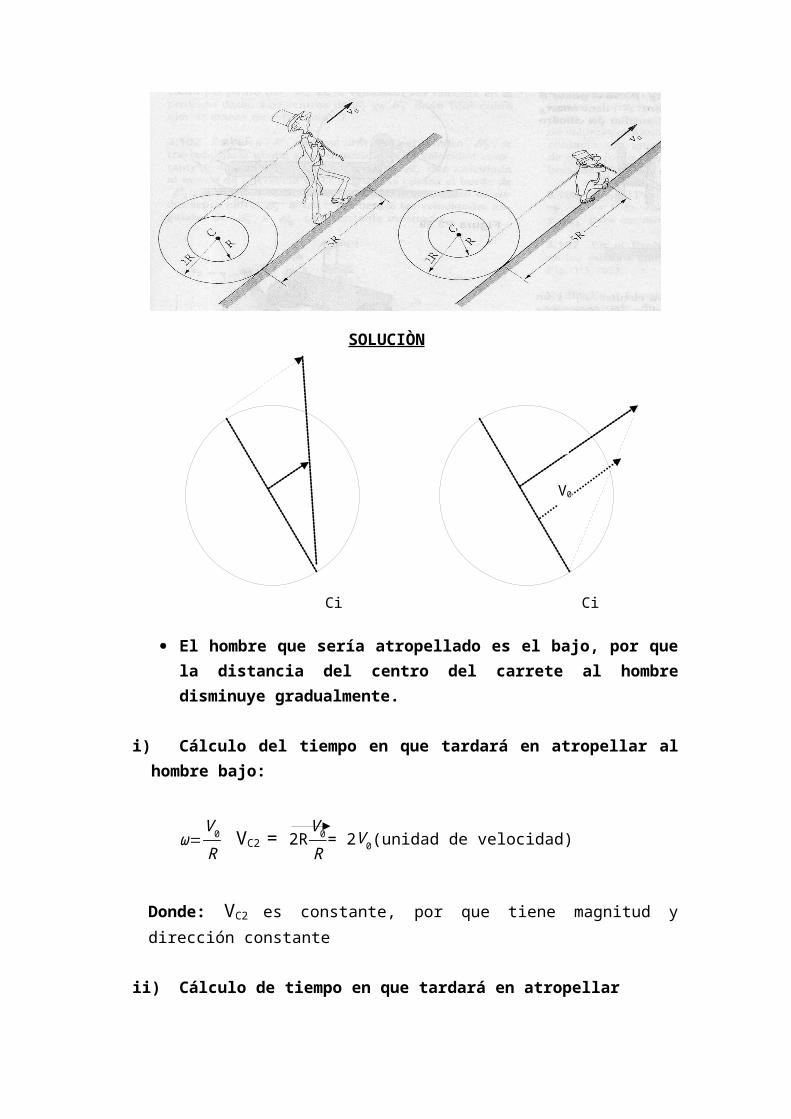
3.90.Dos hombres, uno alto y el otro bajo, caminan hacia arriba sobre planos inclinados idénticos, tirando de carretes idénticos por medio de cuerdas enrolladas alrededor de los cubos de los carretes. Ambos hombres caminan a la misma velocidad constante v0 , y las cuerdas están enrolladas en las direcciones opuestas indicadas. Si los carretes no resbalan sobre el plano, uno de los hombres será atropellado por su proprio carrete. Demuestre cuál es y cuánto tardará el carrete en atropellarlo a partir del instante mostrado.
SOLUCIÒN
El hombre que sería atropellado es el bajo, por que la distancia del centro del carrete al hombre disminuye gradualmente.
i) Cálculo del tiempo en que tardará en atropellar al hombre bajo:
ω=V 0
RVC2 = 2R
V 0
R= 2V 0(unidad de velocidad)
Donde: VC2 es constante, por que tiene magnitud y dirección constante
ii) Cálculo de tiempo en que tardará en atropellar
V C 2H
= VC2 - V 0(unidades de velocidad)
t = rc 2HV C 2
H
= 5RV 0
(Unidades de tiempo)
C1
Ci
VO
VC1 VC2
V0
Ci
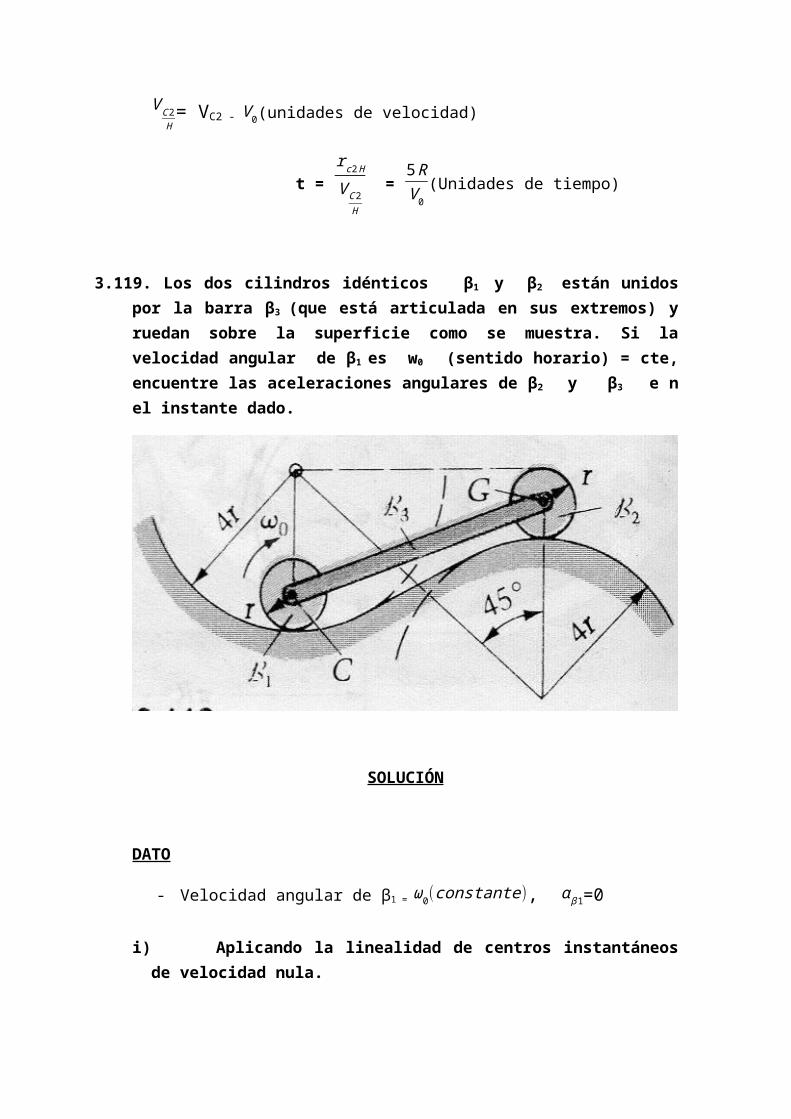
3.119. Los dos cilindros idénticos β1 y β2 están unidos por la barra β3 (que está articulada en sus extremos) y ruedan sobre la superficie como se muestra. Si la velocidad angular de β1 es w0 (sentido horario) = cte, encuentre las aceleraciones angulares de β2 y β3 e n el instante dado.
SOLUCIÓN
DATO
- Velocidad angular de β1 = ω0(constante ), α β 1=0
i) Aplicando la linealidad de centros instantáneos de velocidad nula.
- Como se requiere determinar para ese instante la velocidad angular de β3, y se observa quelas líneas L y L’ no se interceptan, β3 debe tener velocidad angular nula.
Y
Xe t = i
en = jC
Gβ3ω0
β1
β2
ω3=0
ii) Como la barra β3 tiene velocidad angular nula, se cumple VC = VG
VC = VG
ω0r cc 1=ω2 rcc 2ω0=ω2
iii) Cálculo de la aceleración de C (como parte de β1)
aC= r β1 ω1 et + (r ωβ1)
2
ρen
aC= (r ω0)
2
3 rj
aC= r (ω0)
2
3j(unidades de aceleración)
iv) Cálculo de la aceleración de G (como parte de β2)
aG= r β2 ω2 et + (r ωβ 2)
2
ρen
aG= r❑α 2 i + (r ωβ 2)
2
5 r (- j)
aG= r❑α 2 i - r (ω0)
2
5j(unidades de aceleración)…...(I)
v) Cálculo de la aceleración de G como parte de β3 y tomando como punto base a C.
aG= aC+ α 3 k x rcG- ω32 . rcG
aG= r (ω0)
2
3j + α 3 k x (6ri + 2r j )
aG= r (ω0)
2
3j + 6α 3r j - 2α 3r i

aG= - 2α 3r i + (r (ω0)
2
3+¿ 6α 3r ¿ j ….…(II)
VI) De I y II
En i
r❑α 2= - 2α 3r
α 2=¿ - 2α 3 …….(III)
En j
- r (ω0)
2
5=r (ω0)
2
3+¿ 6α 3r
−8 r (ω0)2
15=6 r α 3
…….(IV)
VI) Reemplazando III en IV
α 2= -2(- 0.0889(ω0 )2 ¿
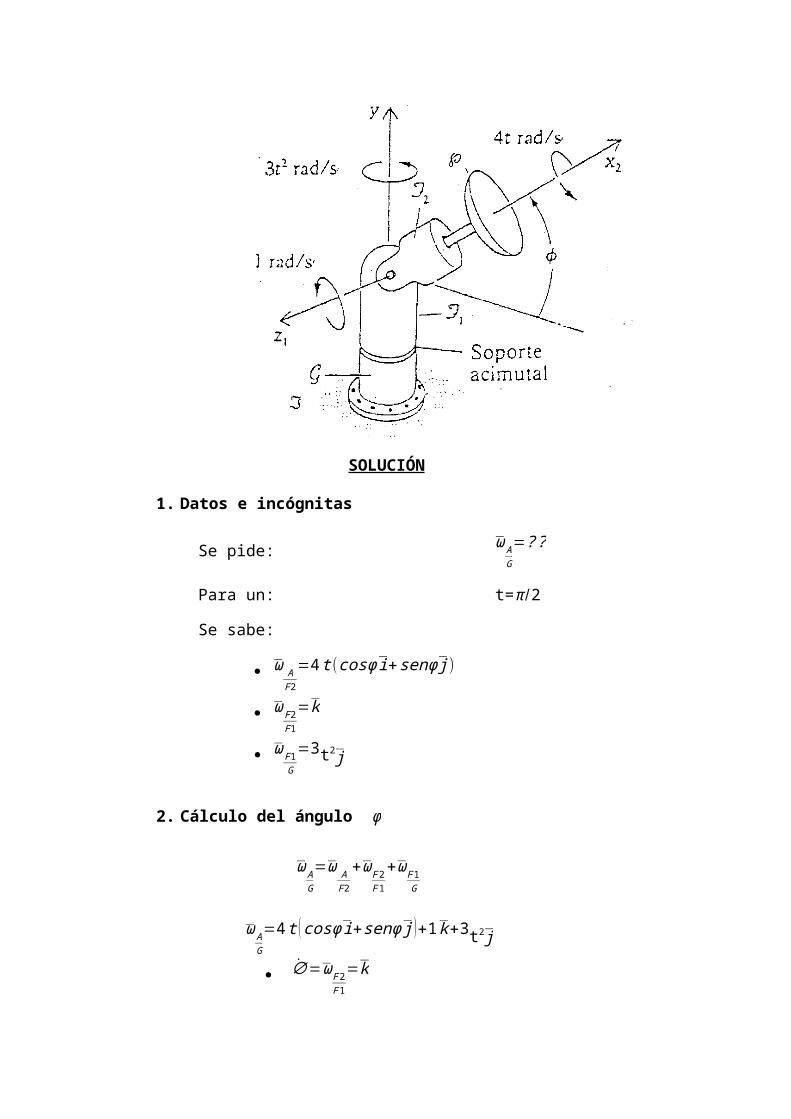
6.7.La antena A está orientada con las siguientes rotaciones:
1. Azimut, respecto a “y” fijo en G; ωF1G
=3t2
2. Elevación, respecto a z1 fijo en un primer marco intermedio F1;ωF 2
F1
=1rad /s
3. Una rotación de polarización respecto al eje x2 de la antena (fijo
en el segundo marco intermedio F2 y en A ¿; ω AF 2
=4 t rad /s
α 3=-0.0889(ω0 )2

SOLUCIÓN
1. Datos e incógnitas
Se pide: ω AG
=? ?
Para un: t=π /2
Se sabe:
ω AF 2
=4 t (cosϕ i+senϕ j)
ωF 2F1
=k
ωF1G
=3t2 j
2. Cálculo del ángulo ϕ
ω AG
=ω AF 2
+ωF2F1
+ωF1G
ω AG
=4 t ( cosϕi+senϕ j )+1k+3t2 j
∅=ωF 2F 1
=k
d ϕd t
=1 ∫ dϕ= ∫ d t⇒ϕ=t
Como: t=π /2⇒ϕ=π /2
3. Cálculo de la velocidad angular

ω AG
=4( π2)(cos ( π2 ) i+sen ( π
2) j)+k+3( π2 )2 j
ω AG
=2 π j+k+ 34π2 j
ω AG
=¿2¿ j+k
↣ω AG
=13.685 j+k
6.10. El cono exterior β tiene el siguiente movimiento prescrito con respecto al cono interior fijo С:
1. Los vértices permanecen juntos.
2. La recta AB (un radio de base fijo en β) siempre se encuentra en algún plano vertical paralelo a XY.
3. El cono β resbala sobre С ;o sea siempre hay una línea de contacto entre 0 y un punto del círculo de base de С.
4. El punto A de β gira alrededor del eje x en un círculo vertical con rapidez constante Hθ
SOLUCIÓN
i) Cálculo de la velocidad angular:
ωB∁
=ωOA∁
…………(1)
Se sabe:
V A=H θet ; et=cosθ k−senθ j
V A=H θ(−senθ j+cosθk )
ii) Calculo de la velocidad de A tomando como punto base O:
V A=ωOA∁
x rOA
Sea:ωOA
∁
=ωx i+ωy j+ωz k
rOA=Hcotγ i+H cosθ j+Hsenθ k
V A=| i j kωx ωy ωz
Hcotγ Hcosθ Hsenθ|V A=(ω yHsenθ−ωz Hcosθ ) i−(ωx Hsenθ−ωz Hcotγ ) j
+(ωxHcosθ−ω yHcotγ )k
V A=H θ(−senθ j+cosθk )
Igualando componentes:
ω yHsenθ=ωz Hcosθ⟼ω y=cosθsenθ
ωz……(2)
ωx=θ senθ+ωz cotγ
senθ………(3)
θ cosθ=ωx cosθ−ω y cotγ…………(4 )
Además:ωOA
∁
.rOA=0
⇒ωx cotγ+ω y cosθ+ωz senθ=0…………(5)
iii)Reemplazando (2) y (3) en (5):
θ senθ+ωz cotγ
senθcotγ+ cosθ
senθωz cosθ+ωz senθ=0
ωz=−θ . senθ . senγ . cosγ .
ωx=θ . sen2 γ .
ω y=−θ cosθ . senγ . cosγ .

ωOA∁
=θ . sen2 γ i−θ . cosθ . senγ . cosγ j−θ . senθ . senγ . cosγ k…… ..(α )
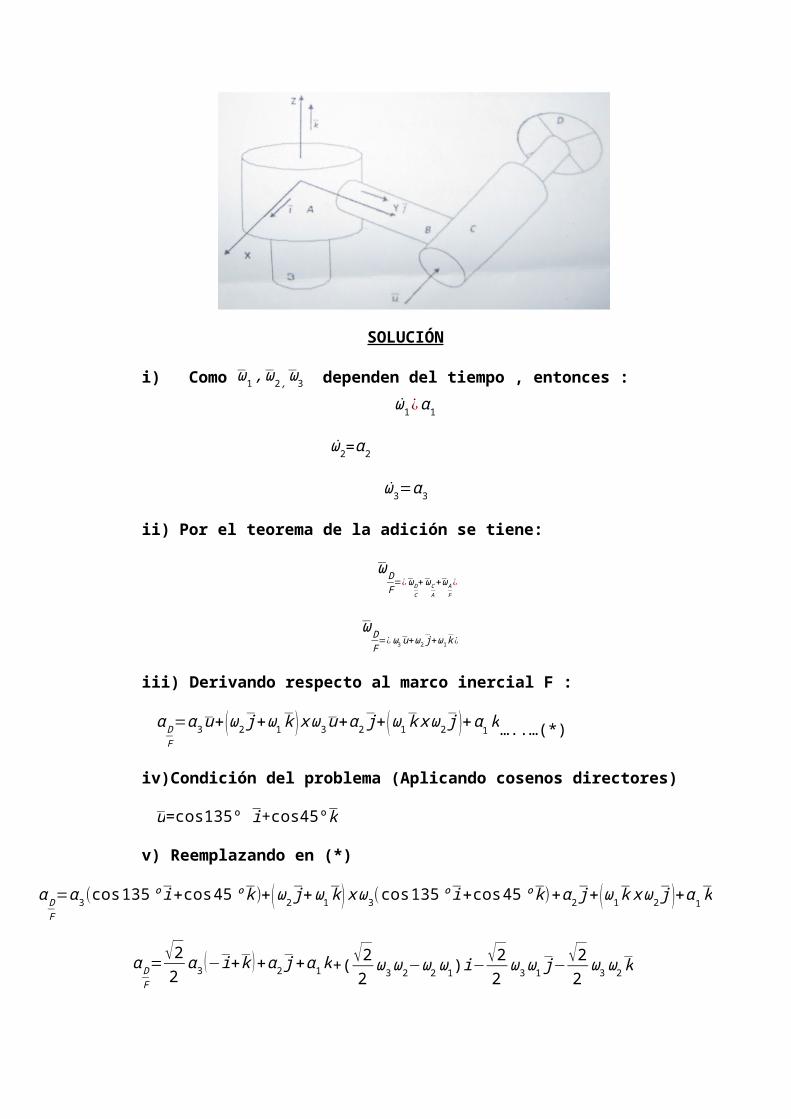
6.24. Los ejes x, y,z están fijos en el cuerpo A que gira en F respecto al
eje z con velocidad angular ω1 k . El brazo B, unido rígidamente a a
A, soporta un cojinete sobre el que gira c con velocidad angular ω2 j respecto a A. Finalmente, el cuerpo D gira alrededor de la
dirección u (que coincide con los ejes de simetría C y D) con ω3u
relativa a C. Si ω1, ω2,ω3son todas funciones del tiempo, encuentre la aceleración angular de D en F en el instante en que u forma ángulos con x y z de 135º y 45º, respectivamente.
SOLUCIÓN
i) Como ω1,ω2 ,ω3 dependen del tiempo , entonces :ω1¿α 1
ω2=α 2
ω3=α 3
ii) Por el teorema de la adición se tiene:
ωDF
=¿ω DC
+ω CA
+ω AF
¿
ωDF
=¿ω3u+ω2 j+ω1k ¿
iii) Derivando respecto al marco inercial F :
α DF
=α 3u+(ω2 j+ω1k )x ω3u+α 2 j+ (ω1 k xω2 j )+α 1k…..…(*)

iv)Condición del problema (Aplicando cosenos directores)
u=cos135º i+cos45ºk
v) Reemplazando en (*)
α DF
=α 3(cos135 º i+cos45 º k )+(ω2 j+ω1 k ) xω3(cos135 º i+cos45 º k )+α2 j+(ω1 k x ω2 j )+α1 k
α DF
=√22
α3 (−i+k ) +α 2 j+α 1 k+(√22
ω3ω2−ω2ω1)i−√22
ω3ω1 j−√22
ω3ω2 k
α DF
=¿)i+(α2−√22
ω3ω1) j+(α 1+√22
α 3−√22
ω3ω2)k
6.29.La barra Sgira en el gozne F a 2rad/s en el sentido indicado. La rueda gira simultáneamente a 3rad/s alrededor de su eje como se indica. Ambas rapideces son constantes. El insecto se desplaza hacia afuera sobre un rayo de la rueda 0.2 rad/s con una aceleración de 0.1rad/s2 , ambas magnitudes con relación al rayo. Para el instante mostrado. Determine la aceleración angular de la rueda y la aceleración del insecto.
SOLUCIÓN
i) Datos
ω SF = 2k (constante) , ω S
F=α S
F
=¿ 0

ωRS = 3i (constante) , ωR
S = α R
S= 0
¿ Asumiendoque larueda est áenelmarcomó vil R
ii)Movimiento del marco móvil rueda R y punto base C
-ωRF
= ωRS
+ω SF
ωRF
= 3i + 2k (rad/ s)
- α RF
= α RS + ω S
F
x ωRS
+ α SF
α RF
= 0 + 2k x 3i + 0
α RF
= 6 j (rad/ s2) …. aceleración angular de la rueda
- Hallando elmovimiento del puntobase C
¿ vCF = V 0 + ω S
F
x rOC
vCF = 0 + 2k x 5i
vCF = 10 j (plg/ s)
¿aCF = aO
F + α S
F
x rOC + ω SF
x ¿¿)
a CF = 0 + 0 + 2k x (2k x 5i)
a CF = - 20 i (plg/ s2)
iii)Movimiento del insecto P respecto a la rueda R
rCP = - k (plg),v PR= - 0.2 k (plg / s) , a P
R = -0.1 k (plg/s2)
* v PF =v C
F + ωR
F
x rCP + v PR
v PF
= 10 j + (3i + 2k ¿ x (- k ) - 0.2 k
v PF
= 13J - 0.2 k
* a PF =a C
F + α R
F
x rCP + ωRF
x ¿¿) +2ωRF
x v PR
+aPR
a PF = - 20 i + 6 j x(-k ¿ + (3i + 2k ¿ x ¿(3i + 2k ¿ x (- k ) ) - 0.1 k
2 (3i + 2k ¿ x(- 0.2 k)
a PF =- 20 i - 6 i + (3i + 2k ¿ x (3 j) - 0.1 k + 2 (0.6 j)
a PF =- 20 i - 6 i + - 6 i + 9k- 0.1 k + 1.2 j
a PF = - 32 i + 1.2 j + 8.9k aceleración del insecto