Chapter5 TheSteady-StateNavier–Stokes Equations · • all data of the Navier–Stokes equations...
46
Chapter 5 The Steady-State Navier–Stokes Equations Remark 5.1. The steady state Navier–Stokes equations. The steady-state or stationary Navier–Stokes equations describe steady-state flows. Such flow fields can be expected in practice if: • all data of the Navier–Stokes equations (1.23) do not depend on the time, • the viscosity ν is sufficiently large, or equivalently, the Reynolds number Re is sufficiently small, see Remark 1.22. The Navier–Stokes equations are nonlinear. That means, the third diffi- culty mentioned Remark 1.19 has to be addressed. ✷ 5.1 The Continuous Equations 5.1.1 The Strong Form and the Variational Form Remark 5.2. Strong form of the steady-state Navier–Stokes equations. The steady-state Navier–Stokes equations are given by -νΔu +(u ·∇)u + ∇p = f in Ω, ∇· u = 0 in Ω, (5.1) where Ω is a bounded domain with Lipschitz boundary. As for the Stokes and Oseen equations, the numerical analysis will be presented for the case of homogeneous Dirichlet boundary conditions u = 0 on Γ . ✷ Remark 5.3. Variational form of the steady-state Navier–Stokes equations. For the variational formulation of the steady-state Navier–Stokes equations, the same functions spaces V = H 1 0 (Ω) and Q = L 2 0 (Ω) as for the Stokes and Oseen equations can be used. A variational form of (5.1) is as follows: Find (u,p) ∈ V × Q such that 217
Transcript of Chapter5 TheSteady-StateNavier–Stokes Equations · • all data of the Navier–Stokes equations...

Chapter 5
The Steady-State Navier–StokesEquations
Remark 5.1. The steady state Navier–Stokes equations. The steady-state orstationary Navier–Stokes equations describe steady-state flows. Such flowfields can be expected in practice if:
• all data of the Navier–Stokes equations (1.23) do not depend on the time,• the viscosity ν is sufficiently large, or equivalently, the Reynolds numberRe is sufficiently small,
see Remark 1.22.The Navier–Stokes equations are nonlinear. That means, the third diffi-
culty mentioned Remark 1.19 has to be addressed. 2
5.1 The Continuous Equations
5.1.1 The Strong Form and the Variational Form
Remark 5.2. Strong form of the steady-state Navier–Stokes equations. Thesteady-state Navier–Stokes equations are given by
−ν∆u+ (u · ∇)u+∇p = f in Ω,∇ · u = 0 in Ω,
(5.1)
where Ω is a bounded domain with Lipschitz boundary. As for the Stokesand Oseen equations, the numerical analysis will be presented for the case ofhomogeneous Dirichlet boundary conditions u = 0 on Γ . 2
Remark 5.3. Variational form of the steady-state Navier–Stokes equations.For the variational formulation of the steady-state Navier–Stokes equations,the same functions spaces V = H1
0 (Ω) and Q = L20(Ω) as for the Stokes and
Oseen equations can be used. A variational form of (5.1) is as follows: Find(u, p) ∈ V ×Q such that
217

218 5 The Steady-State Navier–Stokes Equations
(ν∇u,∇v) + ((u · ∇)u,v)− (∇ · v, p) = 〈f ,v〉V ′,V ,
−(∇ · u, q) = 0 (5.2)
for all (v, q) ∈ V ×Q. The problem can be formulated equivalently as follows:Find (u, p) ∈ V ×Q such that
(ν∇u,∇v) + ((u · ∇)u,v)− (∇ · v, p) + (∇ · u, q) = 〈f ,v〉V ′,V (5.3)
for all (v, q) ∈ V ×Q.By the Sobolov imbeddings H1(Ω) → L4(Ω), see (A.16) and (A.17), one
has that u,v ∈ L4(Ω). Since ∇u ∈ L2(Ω), it follows from the generalizedHolder inequality that the term ((u · ∇)u,v) is well defined if u,v ∈ V . 2
Remark 5.4. The reduced problem in Vdiv. There is also an associated problemin the space Vdiv of weakly divergence-free functions: Find u ∈ Vdiv such that
(ν∇u,∇v) + ((u · ∇)u,v) = 〈f ,v〉V ′,V ∀ v ∈ Vdiv. (5.4)
Of course, if (u, p) ∈ V×Q is a solution of (5.3), u ∈ Vdiv and u is a solution of(5.4). The other direction can be proved as for linear saddle point problems,see Section 2.1. The bilinear form which couples velocity and pressure isthe same as for the Stokes and the Oseen equations and the spaces are thesame, too. Thus, given a solution u of (5.4), there exists a unique pressurep ∈ Q such that (u, p) solves (5.3) if the spaces V and Q satisfy the inf-supcondition (2.14). Note that in the proof of the inf-sup condition, see the proofof Lemma 2.12, the bilinear form which couples the ansatz and test functionsof the velocity space does not play any role. 2
5.1.2 The Nonlinear Term
Remark 5.5. Different forms of the convective term in (5.1). There are severalforms of the convective term of the incompressible Navier–Stokes equations:
(u · ∇)u : convective form,
∇ ·(
uuT)
: divergence form,
∇ ·(
uuT)
+1
2∇(
uTu)
: divergence form with modified pressure,
(∇× u)× u : rotational form (with modified pressure).
Let u = (u1, u2, u3)T be weakly differentiable and weakly divergence-free,
i.e., ∇ · u = 0 almost everywhere.
• Convective form and divergence form. Then, the convective form and thedivergence form are equivalent, since one gets with the product rule

5.1 The Continuous Equations 219
∇ ·(
uuT)
= ∇ ·
u1u1 u1u2 u1u3u2u1 u2u2 u2u3u3u1 u3u2 u3u3
=
∂x(u1u1) + ∂y(u1u2) + ∂z(u1u3)∂x(u2u1) + ∂y(u2u2) + ∂z(u2u3)∂x(u3u1) + ∂y(u3u2) + ∂z(u3u3)
=
(u1∂x + u2∂y + u3∂z)u1(u1∂x + u2∂y + u3∂z)u2(u1∂x + u2∂y + u3∂z)u3
+
u1(∂x(u1) + ∂y(u2) + ∂z(u3))u2(∂x(u1) + ∂y(u2) + ∂z(u3))u3(∂x(u1) + ∂y(u2) + ∂z(u3))
= (u · ∇)u+ (∇ · u)u = (u · ∇)u. (5.5)
• Convective form and divergence form with modified pressure. From (5.5),one obtains
(u · ∇)u+∇p = ∇ ·(
uuT)
+1
2∇(
uTu)
−1
2∇(
uTu)
+∇p
= ∇ ·(
uuT)
+1
2
(
uTu)
+∇pmod
with
pmod = p−1
2
(
uTu)
.
• Convective form and rotational form. The rotational form goes also alongwith a redefinition of the pressure. In contrast to the equivalence of theconvective form and the divergence form, it is not required that u isdivergence-free. It holds
(∇× u)× u+1
2∇(
uTu)
=
∂yu3 − ∂zu2∂zu1 − ∂xu3∂xu2 − ∂yu1
× u+1
2∇(
u21 + u22 + u23)
=
u3∂zu1 − u3∂xu3 − u2∂xu2 + u2∂yu1u1∂xu2 − u1∂yu1 − u3∂yu3 + u3∂zu2u2∂yu3 − u2∂zu2 − u1∂zu1 + u1∂xu3
+1
2
2u1∂xu1 + 2u2∂xu2 + 2u3∂xu32u1∂yu1 + 2u2∂yu2 + 2u3∂yu32u1∂zu1 + 2u2∂zu2 + 2u3∂zu3
=
u1∂xu1 + u2∂yu1 + u3∂zu1u1∂xu2 + u2∂yu2 + u3∂zu2u1∂xu3 + u2∂yu3 + u3∂zu3
= (u · ∇)u. (5.6)
The term with the gradient is used to define a new pressure, the so-calledBernoulli pressure
pBern = p+1
2uTu. (5.7)
The derivation of identity (5.6) is also possible on the basis of (2.133).

220 5 The Steady-State Navier–Stokes Equations
2
Lemma 5.6. Basic properties of the convective term. The convectiveterm is trilinear, i.e., it is linear in each argument.
Let u,v,w ∈ H1(Ω), then
((u · ∇)v,w) =(
∇ ·(
vuT)
,w)
− ((∇ · u)v,w) , (5.8)
((u · ∇)v,w) = (u,∇ (v ·w))− ((u · ∇)w,v) . (5.9)
Proof. The trilinearity of the convective term follows by the linearity of differentiationand integration, e.g., for a, b ∈ R, one obtains
(((au+ bu) · ∇)v,w)
=
∫
Ω
(au+ bu)1∂xv1 + (au+ bu)2∂yv1 + (au+ u)3∂zv1(au+ bu)1∂xv2 + (au+ bu)2∂yv2 + (au+ bu)3∂zv2(au+ bu)1∂xv3 + (au+ bu)2∂yv3 + (au+ bu)3∂zv3
w1
w2
w3
dx
=
∫
Ω
a
u1∂xv1 + u2∂yv1 + u3∂zv1u1∂xv2 + u2∂yv2 + u3∂zv2u1∂xv3 + u2∂yv3 + u3∂zv3
dx+
∫
Ω
b
u1∂xv1 + u2∂yv1 + u3∂zv1u1∂xv2 + u2∂yv2 + u3∂zv2u1∂xv3 + u2∂yv3 + u3∂zv3
dx
= a ((u · ∇)v,w) + b ((u · ∇)v,w) .
The calculations for the two other arguments of the convective term are similar.For u,v,w ∈ H1(Ω), the relations (5.8) and (5.9) are directly proved by straightforward
calculations like in Remark 5.5. E.g., using the product rule and rearranging terms yields
(u,∇ (v ·w))
=
∫
Ω
u · ∇ (v1w1 + v2w2 + v3w3) dx
=
∫
Ω
[
u1v1∂xw1 + u1v2∂xw2 + u1v3∂xw3 + u2v1∂yw1 + u1v2∂yw2
+u2v3∂yw3 + u3v1∂zw1 + u3v2∂zw2 + u3v3∂zw3
]
+[
u1w1∂xv1 + u1w2∂xv2 + u1w3∂xv3 + u2w1∂yv1 + u1w2∂yv2
+u2w3∂yv3 + u3w1∂zv1 + u3w2∂zv2 + u3w3∂zv3
]
dx
= ((u · ∇)w,v) + ((u · ∇)v,w) .
Remark 5.7. Equivalent variational forms of the steady-state Navier–Stokesequations. In (5.2), the convective form of the nonlinear term
nconv(u,v,w) = ((u · ∇)v,w)
was used. Equivalent variational forms are obtained by using the other formsof the nonlinear term described in Remark 5.5. The divergence form is definedby
ndiv(u,v,w) = nconv(u,v,w) +1
2((∇ · u)v,w) .

5.1 The Continuous Equations 221
The motivation for changing the factor in front of the divergence term incomparison with (5.5) is that the term will vanish if v = w even if the firstargument is not weakly divergence-free, see Lemma 5.9. This property is nottrue if a different factor than 1/2 is used. If the rotational form
nrot(u,v,w) = ((∇× u)× v,w)
is used, then the momentum equation in (5.2) changes to
(ν∇u,∇v) + nrot(u,u,v)− (∇ · v, pBern) = 〈f ,v〉V ′,V ∀ v ∈ V,
where the Bernoulli pressure is defined in (5.7).Finally, for the variational form of the Navier–Stokes equations, another
form of the convective term can be applied. Integration by parts gives foru,v,w ∈ H1(Ω)
(∇ · u,v ·w) =
∫
Γ
(v ·w)(u · n) ds− (u,∇(v ·w)) , (5.10)
where n is the outward pointing unit normal vector on Γ . From the Sobolevimbeddings H1(Ω) → L4(Ω), see (A.16) and (A.17), it follows that v,w ∈L4(Ω) and consequently that v ·w ∈ L2(Ω). Since Ω is a bounded domain, itfollows that v·w ∈ L1(Ω). Then, there is a constant C such that v·w+C ∈ Q.If u satisfies the second equation of (5.2), i.e., u is weakly divergence-free,and if u · n = 0 on Γ , then it follows with integration by parts that
0 = (∇ · u,v ·w + C) = (∇ · u,v ·w) +
∫
Γ
Cu · n ds− (u,∇C)
= (∇ · u,v ·w). (5.11)
From (5.10), one obtains
(u,∇ (v ·w)) = 0
and inserting this identity into (5.9) gives for u weakly divergence-free withu · n = 0 on Γ and v,w ∈ H1(Ω)
nconv(u,v,w) = −nconv(u,w,v). (5.12)
With this relation, the skew-symmetric form of the convective term is definedby
nskew(u,v,w) =1
2(nconv(u,v,w)− nconv(u,w,v)) .
2
Remark 5.8. Vanishing of the convective term. Analogously to the Oseenequations, the vanishing of the convective term if the last two argumentsare identical is important for the analysis and finite element error analy-

222 5 The Steady-State Navier–Stokes Equations
sis. For a discussion for cases when this property is given, it is referred toRemark 4.6. 2
Lemma 5.9. Vanishing of the convective term. Let u,v ∈ H1(Ω), then
nrot(u,v,v) = nskew(u,v,v) = 0. (5.13)
If u · n = 0 or v = 0 on Γ , then
ndiv(u,v,v) = 0. (5.14)
If u is weakly divergence-free and if u · n = 0 on Γ , then
nconv(u,v,v) = 0. (5.15)
Proof. The property (5.13) for nskew(·, ·, ·) follows directly from the definition. A directcalculation gives for the rotational form
nrot(u,v,v)
=
v3∂zu1 − v3∂xu3 − v2∂xu2 + v2∂yu1
v1∂xu2 − v1∂yu1 − v3∂yu3 + v3∂zu2
v2∂yu3 − v2∂zu2 − v1∂zu1 + v1∂xu3
,
v1v2v3
=
∫
Ω
[
∂yu1(v1v2 − v1v2) + ∂zu1(v1v3 − v1v3) + ∂xu2(v1v2 − v1v2)
+∂zu2(v2v3 − v2v3) + ∂xu3(v1v3 − v1v3) + ∂yu3(v2v3 − v2v3)]
dx
= 0.
Considering the divergence form then one gets with (5.9) and (5.10)
ndiv(u,v,v) = nconv(u,v,v) +1
2((∇ · u)v,v)
= (u,∇(v · v))− nconv(u,v,v) +1
2((∇ · u)v,v)
= −nconv(u,v,v)− (∇ · u,v · v) + 1
2((∇ · u)v,v)
= −ndiv(u,v,v),
from what ndiv(u,v,v) = 0 follows.For the convective form, (5.15) follows from (5.12). Note that the derivation of (5.12)
used the assumptions stated in the lemma for nconv(·, ·, ·).
Lemma 5.10. Estimates of the convective term. Let u,v,w ∈ H1(Ω),where Ω is a bounded domain with Lipschitz boundary, then there is a C ∈ R
such that
|nconv(u,v,w)| ≤ C ‖u‖H1(Ω) ‖∇v‖L2(Ω) ‖w‖H1(Ω) . (5.16)
For the skew-symmetric form, it holds
|nskew(u,v,w)| ≤ C ‖u‖H1(Ω) ‖v‖H1(Ω) ‖w‖H1(Ω) (5.17)

5.1 The Continuous Equations 223
and for the divergence form of the convective term
|ndiv(u,v,w)| ≤ C ‖u‖H1(Ω) ‖v‖H1(Ω) ‖w‖H1(Ω) . (5.18)
rotation form
Proof. The estimate starts with the application of the generalized Holder inequality
|nconv(u,v,w)| =∣
∣
∣
∣
∫
Ω
(u · ∇)v ·w dx
∣
∣
∣
∣
≤ ‖u‖Lp(Ω) ‖∇v‖Lq(Ω) ‖w‖Lr(Ω) , (5.19)
with1
p+
1
q+
1
r= 1, 1 ≤ p, q, r ≤ ∞.
Since v ∈ H1(Ω), one can take at most p = 2. The other two terms are of the same formsuch that they can treated similarly, i.e., one can take p = r = 4. Applying the Sobolevimbedding H1(Ω) → L4(Ω), see (A.16) and (A.17), gives immediately the statement ofthe lemma for the convective term
|nconv(u,v,w)| ≤ C ‖u‖H1(Ω) ‖∇v‖L2(Ω) ‖w‖H1(Ω) .
The statement for the skew-symmetric term follows by applying the triangle inequality
|nskew(u,v,w)| ≤ 1
2(|nconv(u,v,w)|+ |nconv(u,w,v)|)
and then estimate for the convective term.For the divergence form of the convective term, one gets for the second part of this
term, using the generalized Holder’s inequality, the Sobolev imbedding H1(Ω) → L4(Ω),and (2.38)
1
2((∇ · u)v,w) ≤ 1
2‖∇ · u‖L2(Ω) ‖v‖L4(Ω) ‖w‖L4(Ω)
≤ C ‖∇ · u‖L2(Ω) ‖v‖H1(Ω) ‖w‖H1(Ω)
≤ C ‖∇u‖L2(Ω) ‖v‖H1(Ω) ‖w‖H1(Ω) .
Since the first part of the divergence form is just the convective form, estimate (5.18)follows by combining the estimate for the second part and (5.16).
Remark 5.11. On the convective term.
• If u,v,w ∈ V , then the application of the Poincare–Friedrichs inequality(A.9) to (5.16) – (5.18) gives
|nconv(u,v,w)| ≤ C(Ω) ‖u‖V ‖v‖V ‖w‖V , (5.20)
|nskew(u,v,w)| ≤ C(Ω) ‖u‖V ‖v‖V ‖w‖V , (5.21)
|ndiv(u,v,w)| ≤ C(Ω) ‖u‖V ‖v‖V ‖w‖V . (5.22)
• In the proof of Lemma 5.10, other choices of the parameters in Holder’sinequality are possible, which may lead to different estimates of the tri-linear term. Yet other estimates can be derived for different regularityassumptions on the functions, e.g., see Layton and Tobiska (1998).
2

224 5 The Steady-State Navier–Stokes Equations
5.1.3 Existence, Uniqueness, and Stability of aSolution
Remark 5.12. Contents. This section presents results on the existence, unique-ness, and stability of a weak solution of the Navier–Stokes equations (5.2).It turns out that a solution always exists but it is unique only in the caseof sufficiently small external forces and sufficiently large viscosity, see (5.26)below for the concrete requirement.
From the point of view of numerical simulations, the uniqueness case isthe only interesting one. In the non-uniqueness case, small perturbations ofthe data will lead to time-dependent solutions. From the practical point ofview, one should consider and discretize in such a case the time-dependentNavier–Stokes equations.
Theorem 5.13. Existence of a solution. Let Ω ⊂ Rd, d ∈ 2, 3, be a
bounded domain with Lipschitz boundary ∂Ω and let f ∈ H−1(Ω). Thenthere exists at least one solution of (5.2).
Proof. For the proof it is referred to (Girault and Raviart, 1986, Chapter IV, Thm. 2.3and 2.4). Essential ideas of the proof are as follows:
• The equivalent problem (5.4) in the divergence-free subspace Vdiv is considered, suchthat only the velocity appears.
• The problem is considered in finite-dimensional spaces (Galerkin method).
• A fixed point equation is constructed and the existence of a solution of the finite-
dimensional problems is proved by the fixed point theorem of Brouwer1.
• It is shown that for the dimension of the spaces going to infinity, a subsequence of thesolutions tends to a solution of problem (5.4).
• The existence of the pressure is recovered with the help of the inf-sup condition (2.14).
Remark 5.14. Norms of the trilinear form of the convective term. The normof the convective term is denoted by
N = supu,v,w∈V \0
((u · ∇)v,w)
‖u‖V ‖v‖V ‖w‖V.
Note that N is the smallest constant in estimate (5.20) since
N ≥((u · ∇)v,w)
‖∇u‖L2(Ω) ‖∇v‖L2(Ω) ‖∇w‖L2(Ω)
∀ u,v,w ∈ V,
which is the same inequality as (5.20). The existence of a smaller constant in(5.20) than N contradicts the definition of N . Likewise, define
1 Brouwer’s fixed point theorem. Let C denote a non-void, convex, and compact subset of
a finite-dimensional space, and let F be continuous mapping from C into C. Then F hasat least one fixed point.

5.1 The Continuous Equations 225
Ndiv = supu,v,w∈Vdiv\0
((u · ∇)v,w)
‖u‖V ‖v‖V ‖w‖V. (5.23)
Since Vdiv ⊂ V and the supremum in a subset cannot be larger than thesupremum in the whole set, if follows that 0 < Ndiv ≤ N < ∞. The bound-edness of N is a consequence of estimate (5.20). 2
Remark 5.15. Definition of an operator with the help of an Oseen problem.Let b ∈ Vdiv and consider the Oseen problem: Find u ∈ Vdiv such that
(ν∇u,∇v) + ((b · ∇)u,v) = 〈f ,v〉V ′,V ∀ v ∈ Vdiv. (5.24)
This problem has a unique solution, see Theorem 4.7, and this solution sat-isfies the stability estimate
‖∇u‖L2(Ω) ≤1
ν‖f‖H−1(Ω) , (5.25)
see (4.7).With the Oseen problem (5.24), an operator is defined which maps the
given convection field b to the solution u
Nconv : Vdiv → Vdiv b 7→ u.
It is obvious that each fixed point u∗ of T is a velocity solution of the Navier–Stokes equations (5.4) since then if follows from (5.24) that
(ν∇u∗,∇v) + ((u∗ · ∇)u∗,v) = 〈f ,v〉V ′,V ∀ v ∈ Vdiv.
2
Theorem 5.16. Existence and uniqueness of a solution for small
data. Let the assumptions of Theorem 5.13 be satisfied and let in addition
Ndiv ‖f‖H−1(Ω)
ν2< 1, (5.26)
then problem (5.4) has a unique solution u ∈ Vdiv and problem (5.2) has aunique solution (u, p) ∈ V ×Q.
Proof. It will be shown that Nconv defines a contraction on Vdiv. First of all, it can beobserved that Nconv is bounded independently of b, since one obtains with (5.25)
‖Nconv‖ = supb∈Vdiv,‖b‖V =1
‖Nconvb‖V = supb∈Vdiv,‖b‖V =1
‖u‖V
≤ supb∈Vdiv,‖b‖V =1
1
ν‖f‖H−1(Ω) =
1
ν‖f‖H−1(Ω) .
Now, one chooses b1, b2 ∈ Vdiv arbitrary and denotes u1 = Nconvb1,u2 = Nconvb2. Bothsolutions u1,u2 are solution of the Oseen equation (5.24) with the same right-hand side.Subtracting these equations, one gets

226 5 The Steady-State Navier–Stokes Equations
0 = (ν∇u1,∇v) + ((b1 · ∇)u1,v)− (ν∇u2,∇v)− ((b2 · ∇)u2,v)
= ν (∇ (u1 − u2) ,∇v) + (((b1 − b2) · ∇)u1,v) + ((b2 · ∇) (u1 − u2) ,v) ∀ v ∈ Vdiv.
Setting v = u1−u2 ∈ Vdiv, the last term on the right-hand side vanishes because of (5.15)and one obtains with (5.23), (5.25), and (5.26)
‖∇ (u1 − u2)‖2L2(Ω) = ‖u1 − u2‖2V = − 1
ν(((b1 − b2) · ∇)u1,u1 − u2)
≤ Ndiv
ν‖b1 − b2‖V ‖u1‖V ‖u1 − u2‖V
≤Ndiv ‖f‖H−1(Ω)
ν2‖b1 − b2‖V ‖u1 − u2‖V
< ‖b1 − b2‖V ‖u1 − u2‖V .
It follows that
‖Nconvb1 −Nconvb2‖V = ‖u1 − u2‖V < ‖b1 − b2‖V ∀ b1, b2 ∈ Vdiv,
which is the contraction property for Nconv. The existence and uniqueness of a solutionof problem (5.4) follows now with the fixed point theorem of Banach, Theorem todo. Theuniqueness of the solution of problem (5.2) is a consequence of the fact that V and Qsatisfy the inf-sup condition (2.14), see Theorem 2.40.
Lemma 5.17. Stability of the solution. Let (u, p) ∈ V ×Q be any solutionof (5.2), then
‖∇u‖L2(Ω) ≤1
ν‖f‖H−1(Ω) , (5.27)
‖p‖L2(Ω) ≤1
βis
(
2 ‖f‖H−1(Ω) +C
ν2‖f‖
2H−1(Ω)
)
. (5.28)
Proof. The proof starts in the usual way by choosing as test function (v, q) = (u, p) in(5.3)
(ν∇u,∇u) + n(u,u,u) = 〈f ,u〉V ′,V ,
where n(·, ·, ·) is any of the convective terms introduced in Remark 5.7. With (5.13) – (5.15)it follows that
ν ‖∇u‖2L2(Ω) = 〈f ,u〉V ′,V .
The application of the inequality for the dual pairing gives
ν ‖∇u‖2L2(Ω) ≤ ‖f‖H−1(Ω) ‖∇u‖L2(Ω) .
This inequality is equivalent to (5.27).Starting with the inf-sup condition, one obtains for the pressure with inserting (5.3),
the estimate for the dual pairing, the Cauchy–Schwarz inequality (A.8), and (5.20)
‖p‖L2(Ω) ≤ 1
βissup
v∈V \0
−(∇ · v, p)‖∇v‖L2(Ω)
=1
βissup
v∈V \0
(f ,v)− (ν∇u,∇v)− n(u,u,v)
‖∇v‖L2(Ω)
≤ 1
βis
(
‖f‖H−1(Ω) + ν ‖∇u‖L2(Ω) + C ‖∇u‖2L2(Ω)
)
.

5.2 The Galerkin Finite Element Method 227
The statement follows now by inserting the stability estimate (5.27) for the velocity.
5.2 The Galerkin Finite Element Method
Remark 5.18. Contents. This section discusses finite element error estimates.The essential approaches were already presented for the Galerkin discretiza-tions of the Stokes and the Oseen problem. For the steady-state Navier–Stokesequations, in addition an estimate of the nonlinear (trilinear) term is neces-sary. 2
Remark 5.19. The Galerkin finite element formulation of the steady-stateNavier–Stokes equations. Let V h ⊂ V and Qh ⊂ Q be inf-sup stable fi-nite element spaces, i.e., (2.45) is fulfilled. Then, the Galerkin finite elementdiscretization of the steady-state Navier–Stokes equations reads as follows:Find (uh, ph) ∈ V h ×Qh such that
ν(
∇uh,∇vh)
+ n(
uh,uh,vh)
−(
∇ · vh, ph)
= 〈f ,vh〉V ′,V ∀ vh ∈ V h,−(
∇ · uh, qh)
= 0 ∀ qh ∈ Qh,(5.29)
where n(·, ·, ·) is any of the convective terms introduced in Remark 5.7. Anequivalent formulation is as follows: Find (uh, ph) ∈ V h ×Qh such that
ν(
∇uh,∇vh)
+ n(
uh,uh,vh)
−(
∇ · vh, ph)
+(
∇ · uh, qh)
= 〈f ,vh〉V ′,V
(5.30)for all (vh, qh) ∈ V h ×Qh.
By the satisfaction of the discrete inf-sup condition, it is known that thespace V h
div is not empty, see Remark 2.16. reduced problem?Existence and uniqueness of a solution are proved in the similar way as for
the continuous equation. In particular, a unique solution can be expected onlyfor small external forces (right-hand side) and a large viscosity. A discreteanalog to condition (5.26) will be assumed throughout this section. 2
Remark 5.20. On the convective term for the finite element error analysis.A main tool in the analysis of the Oseen equations is estimate (4.4) whichstates that the convective term vanishes if the convection field is (weakly)divergence-free and the ansatz and test functions are identical. A similarproperty for the different types of the nonlinear convective term of the con-tinuous Navier–Stokes equations was proved in Lemma 5.9.
For nconv(·, ·, ·), the proof of this property relies on the assumption thatthe convection field is weakly divergence-free. Since generally V h
div 6⊂ Vdiv,see Remark 2.47, finite element velocity fields will be generally not weaklydivergence-free and the convective term nconv
(
uh,vh,vh)
will not vanish foruh ∈ V h
div and vh ∈ V h.In contrast, it is obvious to observe that

228 5 The Steady-State Navier–Stokes Equations
nskew(
uh,vh,vh)
=1
2
(
nconv(
uh,vh,vh)
− nconv(
uh,vh,vh))
= 0 (5.31)
for all uh,vh ∈ V h. Analogously to the proof of Lemma 5.9, one finds bydirect computations that also
nrot(
uh,vh,vh)
= 0 ∀ uh,vh ∈ V h (5.32)
andndiv
(
uh,vh,vh)
= 0 ∀ uh,vh ∈ V h. (5.33)
Main tools in the finite element error analysis of the convective term areproperties of the form (5.31) – (5.33), and estimates of the convective termfrom above, see (5.21) and (5.22).
Usually, one finds in the literature the analysis carried out for the skew-symmetric form of the convective term. The presentation below will also usethis form. 2
Theorem 5.21. Existence and uniqueness of the Galerkin finite el-
ement solution for small data. Let the assumptions of Theorem 5.13 besatisfied and let in addition
Nhdiv ‖f‖H−1(Ω)
ν2< 1, (5.34)
where
Nhdiv = sup
uh,vh,wh∈V h
div\0
12
(
((uh · ∇)vh,wh)− ((uh · ∇)vh,wh))
‖uh‖V ‖vh‖V ‖wh‖V. (5.35)
If a pair of finite element spaces V h × Qh is used which satisfies the dis-crete inf-sup condition (2.45), then problem (5.29) with n
(
uh,uh,vh)
=
nskew
(
uh,uh,vh)
has a unique solution (uh, ph) ∈ V h ×Qh.
Proof. The proof follows the lines for proving the uniqueness of the solution for the
continuous problem, see Theorem 5.16. One considers now an Oseen problem in V hdiv:
Given bh ∈ V hdiv, find uh ∈ V h
div such that for given f ∈ V ′
(
ν∇uh,∇vh)
+1
2
(((
bh · ∇)
uh,vh)
−((
bh · ∇)
vh,uh))
= 〈f ,v〉V ′,V ∀ v ∈ V hdiv.
Analogously to Corallary 4.12 the existence of a unique solution of this problem is provedand a stability estimate of the form (4.12) is derived as in Lemma 4.13. Then, one defines alinear operator Nh
conv : V hdiv → V h
div which maps bh → uh. Now, one shows, analogouslyto the proof of Theorem 5.16, that Nh
conv is bounded and it is a contraction.
Lemma 5.22. Stability of the finite element solution. Let V h × Qh
be an inf-sup stable finite element spaces. Then, the finite element solutionof the steady-state Navier–Stokes equations with skew-symmetric form of theconvective term is stable

5.2 The Galerkin Finite Element Method 229
∥
∥∇uh∥
∥
L2(Ω)≤
1
ν‖f‖H−1(Ω) , (5.36)
∥
∥ph∥
∥
L2(Ω)≤
1
βhis
(
2 ‖f‖H−1(Ω) +C
ν2‖f‖
2H−1(Ω)
)
. (5.37)
Proof. The proof is performed analogously to the proof of Lemma 5.17.
Theorem 5.23. Finite element error estimate for the L2(Ω) norm of
the gradient of the velocity. Let Ω ⊂ Rd, d ∈ 2, 3, be a bounded domain
with polyhedral and Lipschitz-continuous boundary, let (5.26) and let insteadof (5.34) the stronger condition
Nhdiv ‖f‖H−1(Ω)
ν2≤
1
4, (5.38)
be satisfied. Let (u, p) ∈ V × Q be the unique solution of the Navier–Stokesequations (5.2). Assume that this problem is discretized with inf-sup stablefinite element spaces V h×Qh using the skew-symmetric form of the convectiveterm and denote by uh ∈ V h
div the velocity solution. Then, the following errorestimate holds
∥
∥∇(u− uh)∥
∥
L2(Ω)
≤ C
(
(
1 +1
ν2‖f‖H−1(Ω)
)
infvh∈V h
div
∥
∥∇(
u− vh)∥
∥
L2(Ω)
+1
νinf
qh∈Qh
∥
∥p− qh∥
∥
L2(Ω)
)
. (5.39)
The constant C does not depend on the mesh size.
Proof. The principle of the proof is the same as for the Stokes equations, see Theorem3.20. Since the space V h
div is not empty, one can use test functions vh ∈ V hdiv in (5.3) and
(5.30) and subtract these equations to obtain the following error equation
ν(
∇(u− uh),∇vh)
+ nskew
(
u,u,vh)
− nskew
(
uh,uh,vh)
−(
∇ · vh, p− qh)
= 0
for all vh ∈ V hdiv and all qh ∈ Qh. In this step, also
(
∇ · vh, qh)
for all qh ∈ Qh wasapplied. Next, the error is decomposed in an approximation error and a discrete remainder
u− uh =(
u− Ihu)
−(
uh − Ihu)
= η − φh, Ihu ∈ V hdiv. (5.40)
Inserting this decomposition into the error equation and setting vh = φh leads to
ν∥
∥∇φh∥
∥
2
L2(Ω)= ν
(
∇η,∇φh)
−(
∇ · φh, p− qh)
(5.41)
+nskew
(
u,u,φh)
− nskew
(
uh,uh,φh)
, ∀ qh ∈ Qh.
The first two terms are estimated in a similar way as for the Oseen equations, see the proofof Theorem 4.14,
ν(
∇η,∇φh)
≤ 2ν ‖∇η‖2L2(Ω) +ν
8
∥
∥∇φh∥
∥
2
L2(Ω),

230 5 The Steady-State Navier–Stokes Equations
and(
∇ · φh, p− qh)
≤ 2
ν
∥
∥p− qh∥
∥
2
L2(Ω)+
ν
8
∥
∥∇φh∥
∥
2
L2(Ω).
The new aspect for the Navier–Stokes equations is the estimate of the trilinear terms. Suchterms are written in the form
aa− bb = aa− ab+ ab− bb = a(a− b) + (a− b)b.
The differences are used to introduce approximation errors into the estimate. Applyingthis approach, using (5.40), yields
nskew
(
u,u,φh)
− nskew
(
uh,uh,φh)
= nskew
(
u,u,φh)
− nskew
(
u,uh,φh)
+ nskew
(
u,uh,φh)
− nskew
(
uh,uh,φh)
= nskew
(
u,u− uh,φh)
+ nskew
(
u− uh,uhφh)
(5.42)
= nskew
(
u,η,φh)
− nskew
(
u,φh,φh)
+ nskew
(
η,uh,φh)
− nskew
(
φh,uh,φh)
.
The term with φh in the last two arguments vanishes by (5.31). Now, all terms are esti-mated separately, using (5.21), Young’s inequality (A.4), and the stability estimates (5.27)
and (5.36). For the first term, one obtains
nskew
(
u,η,φh)
≤ C ‖∇u‖L2(Ω) ‖∇η‖L2(Ω)
∥
∥∇φh∥
∥
L2(Ω)
≤ 2C
ν‖∇η‖2L2(Ω) ‖∇u‖2L2(Ω) +
ν
8
∥
∥∇φh∥
∥
2
L2(Ω)
≤ C
ν3‖∇η‖2L2(Ω) ‖f‖
2H−1(Ω) +
ν
8
∥
∥∇φh∥
∥
2
L2(Ω).
The estimate for the third term is performed analogously, yielding
nskew
(
η,uh,φh)
≤ C
ν3‖∇η‖2L2(Ω) ‖f‖
2H−1(Ω) +
ν
8
∥
∥∇φh∥
∥
2
L2(Ω).
The problematic term, for which the assumption on the smallness of the data is required,is the last one. With (5.35), (5.36), and (5.38), one gets
nskew
(
φh,uh,φh)
≤ Nhdiv
∥
∥∇uh∥
∥
L2(Ω)
∥
∥∇φh∥
∥
2
L2(Ω)
≤4Nh
div ‖f‖H−1(Ω)
ν2
(ν
4
∥
∥∇φh∥
∥
2
L2(Ω)
)
≤ ν
4
∥
∥∇φh∥
∥
2
L2(Ω).
This term can be absorbed into the left-hand side of (5.41).Substituting all estimates into (5.41) gives
∥
∥∇φh∥
∥
2
L2(Ω)
≤ C
(
‖∇η‖2L2(Ω) +1
ν2
∥
∥p− qh∥
∥
2
L2(Ω)+
1
ν4‖∇η‖2L2(Ω) ‖f‖
2H−1(Ω)
)
.
The application of the triangle inequality finally leads to

5.2 The Galerkin Finite Element Method 231
∥
∥∇(
u− uh)∥
∥
L2(Ω)
≤ ‖∇η‖L2(Ω) +∥
∥∇φh∥
∥
L2(Ω)
≤ C
((
1 +1
ν2‖f‖H−1(Ω)
)
‖∇η‖L2(Ω) +1
ν
∥
∥p− qh∥
∥
L2(Ω)
)
.
This estimate gives the statement of the theorem.
Remark 5.24. On Theorem 5.23. From the proof of Theorem 5.23 it is clear,that condition (5.38) can be relaxed to
Nhdiv ‖f‖H−1(Ω)
ν2≤ q < 1
by applying different scalings in the applications of Young’s inequality. How-ever, large values of q in the analysis lead to a large constant C in the errorestimate (5.39). 2
Theorem 5.25. Finite element error estimate for the L2(Ω) norm of
the pressure. Let the assumptions of Theorem 5.23 be fulfilled, then thefollowing error estimate for the pressure holds
∥
∥p− ph∥
∥
L2(Ω)
≤ Cν
βhis
(
1 +‖f‖H−1(Ω)
ν2
)2
infvh∈V h
div
∥
∥∇(
u− vh)∥
∥
L2(Ω)(5.43)
+C
(
1 +1
βhis
(
1 +‖f‖H−1(Ω)
ν2
))
infqh∈Qh
∥
∥p− qh∥
∥
L2(Ω).
The constants do not depend on the mesh size.
Proof. The proof follows the lines of the proofs of Theorems 3.24 and 4.15.
The triangle inequality gives for all qh ∈ Qh
∥
∥p− ph∥
∥
L2(Ω)≤∥
∥p− qh∥
∥
L2(Ω)+∥
∥ph − qh∥
∥
L2(Ω). (5.44)
The estimate of the second term starts with the discrete inf-sup condition (2.45) andthe insertion of the finite element problem (5.29) as well as the variational form of the
steady-state Navier–Stokes equations (5.2)
∥
∥ph − qh∥
∥
L2(Ω)
≤ 1
βhis
supvh∈V h
b(
vh, ph − qh)
∥
∥∇vh∥
∥
L2(Ω)
=1
βhis
supvh∈V h
(
1∥
∥∇vh∥
∥
L2(Ω)
×(
ν(
∇(u− uh),∇vh)
+ nskew
(
u,u,vh)
− nskew
(
uh,uh,vh)
−(
∇ · vh, p− qh)
)
)
.

232 5 The Steady-State Navier–Stokes Equations
In the next step, an identity like (5.42) is used
nskew
(
u,u,vh)
− nskew
(
uh,uh,vh)
= nskew
(
u,u− uh,vh)
+ nskew
(
u− uh,uh,vh)
.
Inserting this identity, using the Cauchy–Schwarz inequality (A.8), the estimate (5.21) forthe trilinear term, (2.144), and the stability estimates (5.27) and (5.36) leads to
∥
∥ph − qh∥
∥
L2(Ω)
≤ 1
βhis
(
ν∥
∥∇(u− uh)∥
∥
L2(Ω)+ C ‖∇u‖L2(Ω)
∥
∥∇(u− uh)∥
∥
L2(Ω)
+C∥
∥∇uh∥
∥
L2(Ω)
∥
∥∇(u− uh)∥
∥
L2(Ω)+∥
∥p− qh∥
∥
L2(Ω)
)
=C
βhis
((
ν +‖f‖H−1(Ω)
ν
)
∥
∥∇(u− uh)∥
∥
L2(Ω)+∥
∥p− qh∥
∥
L2(Ω)
)
.
Using this estimate in (5.44) gives
∥
∥p− ph∥
∥
L2(Ω)
≤ C
βhis
ν
(
1 +‖f‖H−1(Ω)
ν2
)
∥
∥∇(u− uh)∥
∥
L2(Ω)+
(
1 +C
βhis
)
∥
∥p− qh∥
∥
L2(Ω).
Inserting now estimate (5.39) for∥
∥∇(u− uh)∥
∥
L2(Ω)finishes the proof.
L2 error velocity ?
Corollary 5.26. Finite element error estimates for conforming pairs
of finite element spaces. Let the assumptions of Theorem 5.23 be fulfilled,let Ω ⊂ R
d, d ∈ 2, 3, be a bounded domain with polyhedral and Lipschitz-continuous boundary which is decomposed by a regular and quasi-uniformfamily of triangulations T h, and let (u, p) be the unique solution of thesteady-state Navier–Stokes equations equations (5.2) with u ∈ Hk+1(Ω) ∩ Vand p ∈ Hk(Ω)∩Q. Then for the inf-sup stable pairs of finite element spaces
• P bubblek /Pk, k = 1 (MINI element),
• Pk/Pk−1, Qk/Qk−1, k ≥ 2 (Taylor–Hood element),• P bubble
2 /P disc1 , PBR
2 /P disc1 , Qk/P
disck−1, k ≥ 2,
the following error estimates hold
∥
∥∇(u− uh)∥
∥
L2(Ω)≤ Chk
(
1
ν2‖u‖Hk+1(Ω) +
1
ν‖p‖Hk(Ω)
)
, (5.45)
∥
∥p− ph∥
∥
L2(Ω)≤ Chk
(
1
ν3‖u‖Hk+1(Ω) +
1
ν2‖p‖Hk(Ω)
)
. (5.46)
The constant in (5.45) might depend and the constant in (5.46) does dependon the inverse of the discrete inf-sup constant βh
is.
Proof. The estimates follow directly from (5.39), (5.43), and the approximation propertiesof the finite element spaces. Either there is an interpolant in V h
div with optimal approxi-mation properties or one can apply Lemma 2.51. In the latter case, the constant in (5.45)

5.2 The Galerkin Finite Element Method 233
depends on(
βhis
)−1. The dependency of the constant in (5.46) on
(
βhis
)−1follows directly
from (5.43).
Remark 5.27. Discussion of dependency on ν, comparison with the Oseenequations. For the Oseen equations, the constants in the error bounds forthe L2(Ω) errors for the gradient of the velocity and the pressure dependonly on ν−1, compare the discussion in Remark 4.17. It follows from (5.45)and (5.43) that there is a stronger dependency for the Navier–Stokes equa-tions. Formally, the difference arises on the one hand from absorbing the term‖b‖L∞(Ω) from the convection field into the constants of the error estimates
for the Oseen equations because ‖b‖L∞(Ω) = O (1) is assumed. On the other
hand, the terms ‖∇u‖L2(Ω) and∥
∥∇uh∥
∥
L2(Ω)are estimated with the stability
bounds (5.27) and (5.36) in the case of the Navier–Stokes equations, whichgives an extra negative power of ν. Assuming that the convection field ofthe Oseen equations behaves like the convection field of the Navier–Stokesequations, then the constant Cos from (4.14) scales like O
(
ν−3/2)
such thatone obtains in the error estimates (4.21) and (4.22) (for c = 0) the samedependency on the viscosity as for the Navier–Stokes equations. 2
Example 5.28. Analytical example which supports the error estimates. Exam-ple D.2 is considered, for detailed information to the simulations it is alsoreferred to Example 3.29.
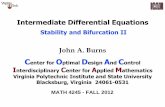
Figures 5.1 – 5.3 show results which were obtained for ν = 10−2 andthe regular grids from Figure 3.2. The stopping criterion for the solution ofthe nonlinear problems was the requirement that the Euclidean norm of theresidual vector was less than 10−10. The convective form of the convectiveterm was used in the simulations.
The order of convergence for errors in different norms coincide generallywith the predictions from the numerical analysis. Only for the L2(Ω) norm ofthe pressure and the mini element P bubble
1 /P1, a higher order than expectedcan be observed. Since the solution of this example is from Q4/Q3, it isreproduced on all grids if this pair of finite element spaces is used.
Figure 5.4 presents results for theQ2/Q1 finite element and different valuesof ν. For ν = 10−3, no way was found to solve the nonlinear problem on thecoarsest grids. One can observe on coarser grids larger velocity errors forsmaller coefficients ν.
ausfuhrlicher ? 2
Example 5.29. Flow around a cylinder in two dimensions. This problem isdescribed in Example D.4.
Simulations were performed with the convective form nconv(·, ·, ·) of theconvective term and different inf-sup stable pairs of finite element spaces ontriangular and quadrilateral grids. The initial grids (level 0) are presented inFigure 5.5. The considered problem, with Dirichlet conditions at the outflow(D.4) was studied comprehensively in John and Matthies (2001). In thesestudies, it was shown that the use of isoparametric finite elements at the

234 5 The Steady-State Navier–Stokes Equations
0 1 2 3 4 5 6 7levels
10-1
100||∇
(u−u
h)||
L2 (Ω)
h
P bubble1 /P1
0 1 2 3 4 5 6 7levels
10-4
10-3
10-2
10-1
100
||∇(u−u
h)||
L2 (Ω)
h2
P2/P1
P bubble2 /P disc
1
Q2/Q1
Q2/Pdisc1
0 1 2 3 4 5 6levels
10-5
10-4
10-3
10-2
10-1
100
||∇(u−u
h)||
L2 (Ω)
h3
P3/P2
P bubble3 /P disc
2
Q3/Q2
Q3/Pdisc2
0 1 2 3 4 5 6levels
10-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
||∇(u−u
h)||
L2 (Ω)
h4
P4/P3
Q4/Q3
Q4/Pdisc3
Fig. 5.1 Example 5.28. Convergence of the errors∥
∥∇(u− uh)∥
∥
L2(Ω)for different dis-
cretizations with different orders k.
0 1 2 3 4 5 6 7levels
10-4
10-3
10-2
10-1
||p−p
h|| L
2 (Ω)
h3/2
P bubble1 /P1
0 1 2 3 4 5 6 7levels
10-5
10-4
10-3
10-2
10-1
||p−p
h|| L
2 (Ω)
h2
P2/P1
P bubble2 /P disc
1
Q2/Q1
Q2/Pdisc1
0 1 2 3 4 5 6levels
10-7
10-6
10-5
10-4
10-3
10-2
||p−p
h|| L
2 (Ω)
h3
P3/P2
P bubble3 /P disc
2
Q3/Q2
Q3/Pdisc2
0 1 2 3 4 5 6levels
10-10
10-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
||p−p
h|| L
2 (Ω)
h4
P4/P3
Q4/Q3
Q4/Pdisc3
Fig. 5.2 Example 5.28. Convergence of the errors∥
∥p− ph∥
∥
L2(Ω)for different discretiza-
tions with different orders k.
cylinder was essential for obtaining accurate results for higher order finite

5.2 The Galerkin Finite Element Method 235
0 1 2 3 4 5 6 7levels
10-4
10-3
10-2
10-1
||u−u
h|| L
2 (Ω)
h2
P bubble1 /P1
0 1 2 3 4 5 6 7levels
10-7
10-6
10-5
10-4
10-3
10-2
10-1
||u−u
h|| L
2 (Ω)
h3
P2/P1
P bubble2 /P disc
1
Q2/Q1
Q2/Pdisc1
0 1 2 3 4 5 6levels
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
||u−u
h|| L
2 (Ω)
h4
P3/P2
P bubble3 /P disc
2
Q3/Q2
Q3/Pdisc2
0 1 2 3 4 5 6levels
10-10
10-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
||u−u
h|| L
2 (Ω)
h5
P4/P3
Q4/Q3
Q4/Pdisc3
Fig. 5.3 Example 5.28. Convergence of the errors∥
∥u− uh∥
∥
L2(Ω)for different discretiza-
tions with different orders k.
0 1 2 3 4 5 6 7levels
10-4
10-3
10-2
10-1
100
||∇(u−u
h)||
L2 (Ω)
h2
ν=1
ν=10−1
ν=10−2
ν=10−3
0 1 2 3 4 5 6 7levels
10-5
10-4
10-3
10-2
10-1
||p−p
h|| L
2 (Ω)
h2
ν=1
ν=10−1
ν=10−2
ν=10−3
0 1 2 3 4 5 6 7levels
10-7
10-6
10-5
10-4
10-3
10-2
10-1
||u−u
h|| L
2 (Ω)
h3
ν=1
ν=10−1
ν=10−2
ν=10−3
Fig. 5.4 Example 5.28. Convergence of the errors for different values of ν, Q2/Q1 finiteelement.
element discretizations. For these elements, the same functions are used for

236 5 The Steady-State Navier–Stokes Equations
the definition of the finite element spaces and the Konstruktion of the mapfrom the reference cell to the physical mesh cell. In this way, one obtains abetter approximation of the boundary Γcyl, but not yet the correct represen-tation. Isoparametric finite elements were used in the studies presented here.The approximation of the boundary of the cylinder is denoted by Γh
cyl. Thesolution of the nonlinear systems was stopped if the Euclidean norm of theresidual vector was less than 10−15.
Fig. 5.5 Example 5.29. Initial grids (level 0) used for the simulations.
For computing the drag and the lift coefficient, the volume formulations(D.19) and (D.20) with the convective form of the convection term were used.In these formulations, one has to specify the functions wd and wl in the inte-rior of Ω. Because these functions are up to the boundary arbitrary functions,one can use in actual computations finite element functions with appropriateboundary values. For the results presented below, the functions were chosenin such a way that they have the same order as the finite element velocity,the degrees of freedom at Γh
cyl were set to be one in the needed component,and all other degrees of freedom were set to be zero, see Figure 5.6. With thisapproach, only the evaluation of volume integrals in one layer of mesh cellsaround the circle is necessary for computing the coefficients.
The used grids possess nodes in the points (0.15, 0.2) and (0.25, 0.2). Thus,the finite element pressure for discretizations with discontinuous pressureapproximation is in particular not continuous in these points. For computingthe difference of the pressure (D.15), the values of the finite element pressurecoming from all mesh cells with the node (0.15, 0.2) or (0.25, 0.2), respectively,were averaged.
Results for the drag coefficient, the lift coefficient, and the difference ofthe pressure between the front and the top of the cylinder are presented inFigures 5.7 – 5.10. It can be seen that many results show a certain order ofconvergence. To our best knowledge, a numerical analysis of this phenomenonis not available. A possible approach was presented in John et al. (1998). Itis however not clear if the regularity assumptions on the solution of thecontinuous problem assumed in this paper are always true.

5.2 The Galerkin Finite Element Method 237
Fig. 5.6 Example 5.29. Choice of wd and wl for Q2. In the filled bullet, the value 1 wasset in the respective component, in the empty bullets the finite element functions havevalue 0. The filled mesh cells form the domain for integration in (D.19) and (D.20).
Fig. 5.7 Example 5.29. Convergence of the drag coefficient for different pairs of finite ele-ment spaces, boundary conditions (D.5), reference value (D.21). The results for boundarycondition (D.4) are almost identical.
Fig. 5.8 Example 5.29. Convergence of the lift coefficient for different pairs of finite ele-ment spaces, Dirichlet boundary conditions (D.4), reference value (D.22).
Comparing the results of discretizations with different order, the higheraccuracy of third order velocity/second order pressure compared with secondorder velocity/first order pressure can be observed also for quantities of in-terest which are not Sobolev norms of the error. The comparable inaccurate

238 5 The Steady-State Navier–Stokes Equations
Fig. 5.9 Example 5.29. Convergence of the lift coefficient for different pairs of finite ele-ment spaces, do-nothing boundary conditions (D.5), reference value (D.24).
Fig. 5.10 Example 5.29. Convergence of the pressure difference for different pairs of fi-nite element spaces, boundary conditions (D.5), reference value (D.23). The results forboundary condition (D.4) are almost identical.
results for the P bubble2 /P disc
1 discretization are notable. It can be also seenthat with discontinuous pressure approximations and averaging of pressurevalues, comparable inaccurate results for the pressure difference are obtained,see Figure 5.10. 2
Remark 5.30. Convective forms in simulations. Despite the lack of a finiteelement error analysis, the convective form of the convective term is usedoften in simulations. Sometimes, simulations with the skew-symmetric formcan be found in the literature. The rotational form became somewhat popularin recent years. To our best knowledge, the divergence form is practically notused.
Comprehensive studies on the advantages and drawbacks of the differentforms of the convective term were performed in Rockel (2013). todo details
2
Remark 5.31. Other discretizations. nonconforming, other n, stabilizations 2

5.3 Iteration Schemes for Solving the Nonlinear Problem 239
5.3 Iteration Schemes for Solving the Nonlinear
Problem
Remark 5.32. General fixed point iteration. The Navier–Stokes equations(5.3) can be written in operator form, see also Remark 2.4 for this concept,
0 = f −Au−Nuu−B′p+Bu in V ′ ×Q′,
where Nu : V → V ′ is the operator for the nonlinear convective term.Applying now an injective linear operator N−1
lin : V ′ ×Q′ → V ×Q yields
0 = N−1lin 0 = N−1
lin (f −Au−Nuu−B′p+Bu) in V ×Q.
Then, the operator N−1lin (f −Au−Nuu−B′p+Bu) is a map from V ×
Q→ V ×Q and to this map, the standard approach for a fixed point iterationcan be applied: Given
(
u(m), p(m))
∈ V × Q, compute(
u(m+1), p(m+1))
∈V ×Q by
(
u(m+1)
p(m+1)
)
=
(
u(m)
p(m)
)
− ϑN−1lin
(
〈f ,v〉V ′,V −N(
u(m);u(m), p(m))
0
)
,
(5.47)where
N (w;u, p) =
(
a(u,v) + n(w,u,v) + b(v, p)b(u, q)
)
and ϑ ∈ (0, 1] is a damping factor. For convenience of notation, the operatorsare replaced by the bilinear forms.
An iteration of form (5.47) requires the solution of a linear problem. LetN lin : range
(
N−1lin
)
→ V ′ × Q′ be the inverse operator of N−1lin , then the
linear problem has the form
N lin
(
δu(m+1)
δp(m+1)
)
=
(
〈f ,v〉V ′,V −N(
u(m);u(m), p(m))
0
)
.
Writing the update in the form
(
δu(m+1)
δp(m+1)
)
=
(
u(m+1) − u(m)
p(m+1) − p(m)
)
,
the linear system can be reformulated for a new velocity and pressure solution
N lin
(
u(m+1)
p(m+1)
)
=
(
〈f ,v〉V ′,V −N(
u(m);u(m), p(m))
0
)
+N lin
(
u(m)
p(m)
)
.
(5.48)2

240 5 The Steady-State Navier–Stokes Equations
Remark 5.33. Fixed point iteration with scaled Stokes equations. A simpleiterative approach is obtained by setting
N lin = N(
0; u(m+1), p(m+1))
.
Inserting this expression into (5.48) gives
(
a(u(m+1),v) + b(v, p(m+1))
b(u(m+1), q)
)
=
(
〈f ,v〉V ′,V − a(u(m),v)− n(u(m),u(m),v)− b(v, p(m))−b(u(m), q)
)
+
(
a(u(m),v) + b(v, p(m))b(u(m), q)
)
=
(
〈f ,v〉V ′,V − n(u(m),u(m),v)0
)
.
These equations are scaled Stokes equation, see (3.83).This approach requires only the solution of a scaled Stokes problem with
the same matrix and with a different right-hand side in each iteration step.It is well known for poor convergence properties in the case that ν is notsufficiently large. That means, it converges only with the application of strongdamping or there is even no convergence at all if the initial iterate is notsufficiently close to the solution. Therefore, this type of fixed point iterationis in general not recommended and it will not be considered further here. 2
Remark 5.34. Picard iteration. The so-called Picard iteration is obtained bysetting
N lin = N(
u(m); u(m+1), p(m+1))
.
One obtains for the linear system (5.48) to be solved
(
a(u(m+1),v) + n(u(m), u(m+1),v) + b(v, p(m+1))
b(u(m+1), q)
)
=
(
〈f ,v〉V ′,V − a(u(m),v)− n(u(m),u(m),v)− b(v, p(m))−b(u(m), q)
)
+
(
a(u(m),v) + n(u(m),u(m),v) + b(v, p(m))b(u(m), q)
)
=
(
〈f ,v〉V ′,V
0
)
. (5.49)
The different forms of the convective terms on the left-hand side of (5.49)look like follows:

5.3 Iteration Schemes for Solving the Nonlinear Problem 241
nconv
(
u(m), u(m+1),v)
=((
u(m) · ∇)
u(m+1),v)
,
ndiv
(
u(m), u(m+1),v)
=((
u(m) · ∇)
u(m+1),v)
+1
2
((
∇ · u(m))
u(m+1),v)
,
nrot
(
u(m), u(m+1),v)
=((
∇× u(m))
× u(m+1),v)
,
nskew
(
u(m), u(m+1),v)
=1
2
[ ((
u(m) · ∇)
u(m+1),v)
−((
u(m) · ∇)
v, u(m+1)) ]
.
Thus, using nconv
(
u(m), u(m+1),v)
one has to solve in (5.49) Oseen equa-
tions with b = u(m) and c = 0. For ndiv
(
u(m), u(m+1),v)
, one obtains Oseen
equations with b = u(m) and c = ∇ · u(m). In both cases, the equations aredominated by convection if ν is small compared with
∥
∥u(m)∥
∥
L∞(Ω). The use
of nrot
(
u(m), u(m+1),v)
leads to Oseen equations with b = 0 and the ma-
trix(
∇× u(m))
as coefficient of the reactive term. In this case, there is noconvection term in the linear problem.
Note that for finite element functions in all cases the assumptions onthe coefficients of the Oseen equations which were made in the analysisof the Oseen equations, see Remark 4.2, are generally not fulfilled by thecoefficients coming from the fixed point iteration of the stationary Navier–Stokes equations. That means, uh,(m) is generally not weakly divergence-free,∇·uh,(m) might be negative, and numerical analysis for a matrix coefficients(
∇× uh,(m))
is even not available in the literature. However, even if such ananalysis can be performed, the natural extension of the assumptions on thescalar reaction coefficient to a matrix coefficient would be that the matrixis symmetric and positive semi-definite. These assumptions are generally notfulfilled by
(
∇× uh,(m))
.The skew-symmetric form of the convective term does not lead to an equa-
tion of Oseen type, since in the zeroth order term with respect to u(m+1),the gradient of the test function appears instead of the test function itself.
Since the matrix in (5.49) depends on the current approximation u(m), itchanges in every iteration. 2
Remark 5.35. Picard method: structure of matrices and memory require-ments. After having applied an inf-sup stable finite element method, thelinear system (5.49) has the saddle point form
(
A BT
B 0
)(
up
)
=
(
f0
)
. (5.50)

242 5 The Steady-State Navier–Stokes Equations
• Convective form of the convective term. In the finite element equation(5.49) that arises in the fixed point iteration for solving the non-linearity,the term
nconv
(
uh,(m), uh,(m+1),vh)
=((
uh,(m) · ∇)
uh,(m+1),vh)
(5.51)
appears on the left-hand side. Here, uh,(m) is a known finite element func-tion. Using the ansatz (3.72) for uh,(m+1) and considering a test functionφh
i , one gets for the convective form of the convective term
((
uh,(m) · ∇)
uh,(m+1),φhi
)
=
3Nv∑
j=1
uhj
((
uh,(m) · ∇)
φhj ,φ
hi
)
.
Thus, the (i, j)-matrix entry is
(A)ij =
∫
Ω
(
uh,(m) · ∇)
φhj · φh
i dx
=3∑
k=1
∫
Ω
((
uh,(m) · ∇)
φhj
)
k
(
φhi
)
kdx. (5.52)
The product(
(
uh,(m) · ∇)
φhj
)
k
(
φhi
)
kvanishes if the k-th component
of φhj or the k-th component of φh
i vanishes. If φhi and φh
j posses thesame non-vanishing component, the matrix entry is independent of thecomponent. Thus, the concvective term in (5.51) leads to a matrix blockof the velocity-velocity couplings of the form
A =
A11 0 00 A11 00 0 A11
. (5.53)
• Divergence form of the convective term. In addition to matrix entries ofform (5.52), the divergence form has the following entries to (A)ij
1
2
∫
Ω
(
∇ · uh,(m))
φhj · φh
i dx =1
2
3∑
k=1
∫
Ω
(
∇ · uh,(m))(
φhj
)
k
(
φhi
)
kdx.
A contribution of this type occurs also for the Galerkin discretizationof the Oseen equations, see Remark 4.19. It is obvious that this entryis zero if the non-vanishing components of φi and φj are not the same.Otherwise, the value of this entry is independent of the index k of thenon-vanishing entry. Altogether, matrix of the velocity-velocity couplinghas the form (5.53).

5.3 Iteration Schemes for Solving the Nonlinear Problem 243
• Rotational form of the convective term. The matrix entry for the rota-tional form is given by
(A)ij
=((
∇× uh,(m))
× φhj ,φ
hi
)
=
∫
Ω
(
∇× uh,(m))
2
(
φhj
)
3−(
∇× uh,(m))
3
(
φhj
)
2(
∇× uh,(m))
3
(
φhj
)
1−(
∇× uh,(m))
1
(
φhj
)
3(
∇× uh,(m))
1
(
φhj
)
2−(
∇× uh,(m))
2
(
φhj
)
1
·
(
φhi
)
1(
φhi
)
2(
φhi
)
3
dx.
It follows that even if the non-vanishing components of φhi and φh
j aredifferent, the resulting entry will not vanish. Hence, the matrix for thevelocity-velocity coupling has the form
A =
A11 A12 A13
A21 A22 A23
A31 A32 A33
, (5.54)
which is the general form for this matrix.• Skew-symmetric form of the convective term. Besides the half of the term(5.52), the skew-symmetric form possesses the contribution
−1
2
∫
Ω
(
uh,(m) · ∇)
φhi · φh
j dx
= −1
2
3∑
k=1
∫
Ω
((
uh,(m) · ∇)
φhi
)
k
(
φhj
)
kdx
in (A)ij . From the same discussion as for (5.52), it follows that the matrixof the velocity-velocity coupling has the block-diagonal form (5.53).
Summary. Using the convective form, the divergence form, and the skew-symmetric form of the convective term leads to block-diagonal matrices ofform (5.53) in the Picard iteration. Only the rotational form requires the useof a full matrix of form (5.54). 2
Remark 5.36. Newton’s method. In Newton’s method, one takes as linear op-erator the derivative of the nonlinear operator at the current iterate
N lin = DN
(
u(m)
p(m)
)
.
Considering the Gateaux derivative, one obtains, using the linearity of N ineach argument,

244 5 The Steady-State Navier–Stokes Equations
DN
(
u
p
)
= limε→0
N(u+ εφ;u+ εφ, p+ εψ)−N(u;u, p)
ε
= N(φ;u, p) +N(u;φ, p) +N(u,u, ψ).
Using this operator as N lin in (5.48) leads to
N(u(m+1);u(m), p(m)) +N(u(m); u(m+1), p(m)) +N(u(m),u(m), p(m+1))
=
(
〈f ,v〉V ′,V
0
)
−N(u(m);u(m), p(m)) +N(u(m);u(m), p(m))
+N(u(m);u(m), p(m)) +N(u(m),u(m), p(m)).
Collecting terms gives
(
a(u(m+1),v) + n(u(m), u(m+1),v) + n(u(m+1),u(m),v) + b(v, p(m+1))
b(u(m+1), q)
)
=
(
〈f ,v〉V ′,V + n(u(m),u(m),v)0
)
. (5.55)
In this method, the matrix and the right-hand side change in every itera-tion. Problem (5.55) is an Oseen problem with b = u(m) and the tensor-valuedreaction ∇u(m). 2
Remark 5.37. On Newton’s method.
• The order of convergence of Newton’s method is expected to be betterthan of the Picard iteration if
the solution (u, p) is sufficiently smooth, the linear systems (5.55) are solved sufficiently accurately.
For two-dimensional problems, there are powerful direct sparse solverswhich allow for an accurate solution of the linear systems if the numberof degrees of freedom is not too large, currenly ≤ 5 · 105 − 5 · 106. Forlarge two-dimensional problems and in particular for three-dimensionalproblems, one has to use iterative solvers. In this case, it turns out to berather inefficient to solve the linear systems accurately. A common crite-rion consists in using as stopping criterion for their solution the reductionof the Euclidean norm of the residual vector by a prescribed factor, e.g.,by the factor 10.
• Newton’s method involves the ’reactive’ term((
u(m+1) · ∇)
u(m),v)
onthe left-hand side. This term does not fit into the theory of the Oseenequations, since the required non-negativity of this term stated in Re-mark 4.2 is generally not given.This term may lead to difficulties in the convergence of Newton’s methodsince the properties of the tensor-valued reaction are not clear.
2

5.3 Iteration Schemes for Solving the Nonlinear Problem 245
Remark 5.38. Newton’s method: structure of matrices and memory require-ments. The application of an inf-sup stable finite element method to (5.55)leads to a linear saddle point problem of form (5.50).
Convective form of the convective term. The term
n(
uh,(m),uh,(m+1),vh)
+ n(
uh,(m+1),u(h,m),vh)
=((
uh,(m) · ∇)
uh,(m+1),vh)
+((
uh,(m+1) · ∇)
uh,(m),vh)
arises on the left-hand side of the equation. The corresponding matrix entryfor the convective form of the convective term becomes
(A)ij =
3∑
k=1
∫
Ω
[
(
uh,(m) · ∇(
φhj
))
k·(
φhi
)
k
+
(
3∑
l=1
(
φhj
)
l· ∇(
uh,(m))
l
)
k
·(
φhi
)
k
]
dx, i, j = 1, . . . , dNv.
The sum in the second term is generally not zero for each index k since gen-erally ∇
(
uh,(m))
ldoes not vanish. It follows that the second term in general
does not vanish for each pair of indices (i, j) with∣
∣
∣supp
(
φhi
)
∩ supp(
φhj
)∣
∣
∣>
0. Hence, the matrix blocks Akl posses in general non-zero entries for all pairs(k, l). Altogether, the matrix which originates from the convective and reac-tive term in (5.55) has the block form (5.54), where the block are in generalmutually different since different derivatives of uh,(m) have to be consideredin the assembling of each block.
Divergence form and skew-symmetric form of the convective term. Bothforms contain the term from the convective form. Since this term leads alreadyto matrix of the velocity-velocity coupling of form (5.54), also the matricesfor these to forms have the form (5.54).
Rotational form of the convective term. Already for the Picard iteration,the rotational form of the convective term requires the general form (5.54) of amatrix for the velocity-velocity. With the additional term which is introducedfrom Newton’s method, one gets the same form.
Summary. The application of Newton’s method leads always to a ma-trix for the velocity-velocity coupling of form (5.54) with mutually differentblocks. 2
Remark 5.39. Memory requirements and computational costs for the completelinear saddle point problem. The matrix of the velocity-velocity couplings inthe linear saddle point problems (5.49) and (5.55) is the sum of the matrixwhich arises in the discretization of the viscous term, see (3.76), and thematrix from the linearization of the convective term. The number of blocksin the velocity-velocity couplings that has to be stored is given in Table 5.1. Itcan be seen that using Newton’s method requires the storage of more velocity-

246 5 The Steady-State Navier–Stokes Equations
velocity matrix blocks. As a consequence, the computational costs for matrixassembling are larger for Newton’s method. As there are more non-vanishingblocks, more operations are necessary in performing matrix-vector products.
Table 5.1 Number of matrix blocks to be stored in solving the three-dimensional Navier–Stokes equations, convective form of the nonlinear term.
form of viscous term fixed point (5.49) Newton (5.55)(
ν∇uh,(m+1),∇vh)
1 9(
2νD(
uh,(m+1))
,D(
vh))
6 9
2
5.4 A Posteriori Error Estimates
Remark 5.40. Goals of a posteriori error estimators. So far, so called a priorierror estimates were proved, e.g., in Corollary 3.28. The right-hand side ofsuch estimates depends on the unknown solution of the continuous problemand on an unknown constant.
The goals of a posteriori error estimates are twofold. First, they shouldprovide estimates of errors between a computed solution
(
uh, ph)
and theunknown solution (u, p) of the continuous problem (3.2). Usually, the errorsare measured in norms of Sobolev spaces defined on Ω. That means, estimatesof global errors from above have to be derived, which have the form, e.g., forthe velocity
∥
∥u− uh∥
∥
Ω≤ Cη. (5.56)
In (5.56), η is a quantity which is computable with the information availablein the numerical solution process and C is a positive constant which shouldbe independent of the mesh width and the solution and for which one shouldhave an idea of its order of magnitude.
The second task of a posteriori error estimates consists in controlling anadaptive mesh refinement. The rationale behind this idea is that the errorof the computed solution to the solution of the continuous problem can bereduced best, or at least significantly, if the mesh in those subregions of thedomain is refined, where the local error is largest. Then, a local a posteriorierror estimate should identify these subregions. To this end, a local lowerestimate from below of the form
ηK ≤ C∥
∥u− uh∥
∥
ω(K)(5.57)
is necessary, where ω(K) denotes a small neighborhood of a mesh cell Kand ηK is a computable quantity. For (5.57), it has to be proved that the

5.4 A Posteriori Error Estimates 247
positive constant C can be bounded from below and above independently ofK. Estimate (5.57) tells that in subregions where the local error estimate ηKis large, also the local error is large.
There are different ways for computing a posteriori error estimates. Amongthe most popular ones are residual-based estimates, which where presentedfor the Stokes equations the first time in Verfurth (1989), and estimateswhich are based on the solution of local problems, that were also introducedin Verfurth (1989).
A review of residual-based estimators can be found in Verfurth (1995,2013). 2
5.4.1 A Residual-Based A Posteriori Error Estimator
Remark 5.41. Basic assumptions. This section considers conforming inf-supstable pairs of finite element spaces, which are defined on a quasi-uniformfamily of triangulations. 2
Lemma 5.42. Estimate of the supremum of the bilinear form. Forall (w, r) ∈ V ×Q it is
‖∇w‖L2(Ω) + ‖r‖L2(Ω)
≤1
βis,Babsup
(v,q)∈V×Q(v,q) 6=(0,0)
(∇w,∇v)− (∇ · v, r) + (∇ ·w, q)
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
≤1
βis,Bab
(
‖∇w‖L2(Ω) + ‖r‖L2(Ω)
)
. (5.58)
Proof. The first estimate follows directly from the Babuska inf-sup condition (3.7). Forthe second estimate, one applies the Cauchy–Schwarz inequality (A.8) and (2.39), whichgives
sup(v,q)∈V ×Q(v,q) 6=(0,0)
(∇w,∇v)− (∇ · v, r) + (∇ ·w, q)
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
≤ sup(v,q)∈V ×Q(v,q) 6=(0,0)
‖∇w‖L2(Ω) ‖∇v‖L2(Ω) + ‖∇v‖L2(Ω) ‖r‖L2(Ω) + ‖∇w‖L2(Ω) ‖q‖L2(Ω)
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
≤ sup(v,q)∈V ×Q(v,q) 6=(0,0)
(
‖∇w‖L2(Ω) + ‖r‖L2(Ω)
)(
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
)
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
= ‖∇w‖L2(Ω) + ‖r‖L2(Ω) .
Remark 5.43. To estimate (5.58). Estimate (5.58) states the fact that theoperator in the numerator defines an isomorphism from V ×Q to V ′×Q′. The

248 5 The Steady-State Navier–Stokes Equations
left estimate gives injectivity of the operator since if two different argumentswould give the same results, the term in the middle of (5.58) vanishes for thedifference and the left-hand side does not, which is a contradiction. The rightestimate holds for all arguments and thus it just gives the boundedness of theoperator. Altogether, an estimate of type (5.58) is not special for the Stokesequations but an estimate of this type holds always for well-posed problems.
2
Corollary 5.44. Error estimate with the residual. Let V h ⊂ V andQh ⊂ Q, let (u, p) be the solution of (3.2) and
(
uh, ph)
∈ V h × Qh bearbitrary, then it holds
sup(v,q)∈V×Q(v,q) 6=(0,0)
(f ,v)− (∇uh,∇v) + (∇ · v, ph)− (∇ · uh, q)
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
≤∥
∥∇(u− uh)∥
∥
L2(Ω)+∥
∥p− ph∥
∥
L2(Ω)(5.59)
≤1
βis,Babsup
(v,q)∈V×Q(v,q) 6=(0,0)
(f ,v)− (∇uh,∇v) + (∇ · v, ph)− (∇ · uh, q)
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
.
Proof. Setting w = u− uh and r = p− ph in (5.58) gives for the numerator
(∇(u− uh),∇v)− (∇ · v, p− ph) + (∇ · (u− uh), q)
= (f ,v)− (∇uh,∇v) + (∇ · v, ph)− (∇ · uh, q). (5.60)
Now, the statement of the corollary follows from (5.58).
Remark 5.45. To estimate (5.59). The supremum in estimate (5.59) is justthe definition of the norm of the residual in V ′ × Q′. Hence estimate (5.59)states that the error
∥
∥∇(u− uh)∥
∥
L2(Ω)+∥
∥p− ph∥
∥
L2(Ω)for an arbitrary pair
(
uh, ph)
∈ V h × Qh is bounded from below and from above by the norm ofthe residual in the dual space. However, in practice one cannot compute thisnorm since the supremum is taken in a infinite-dimensional space. The goalconsists now in estimating this norm with computable expressions. 2
Theorem 5.46. Global upper, residual-based, a posteriori error es-
timate for conforming inf-sup stable finite element spaces. Letf ∈ L2(Ω), let Phf a polynomial approximation of f (which can be inte-grated exactly), and consider conforming finite element spaces V h/Qh whichsatisfy the discrete inf-sup condition (2.45) on a quasi-uniform family of tri-angulations T hh>0. Let (u, p) be the solution of (3.2) and
(
uh, ph)
be thesolution of (3.13). Defining the mesh cell residual
rhK(
uh, ph)
=(
Phf +∆uh −∇ph) ∣
∣
K∀ K ∈ T h, (5.61)
the face residual

5.4 A Posteriori Error Estimates 249
rhE(
uh, ph)
=[∣
∣
(
−∇uh + phI)
nE
∣
∣
]
E∀ E ∈ Eh, (5.62)
and the local error estimator
ηK =
(
h2K∥
∥rhK(
uh, ph)∥
∥
2
L2(K)+∥
∥∇ · uh∥
∥
2
L2(K)
+1
2
∑
E⊂∂K,E∈Eh
hE∥
∥rhE(
uh, ph)∥
∥
2
L2(E)
)1/2
,
then it holds the a posteriori estimate
∥
∥∇(u− uh)∥
∥
L2(Ω)+∥
∥p− ph∥
∥
L2(Ω)
≤ C
∑
K∈T h
η2K + h2K∥
∥f − Phf∥
∥
2
L2(K)
1/2
, (5.63)
where the constant does not depend on the solution and on the mesh width.
Proof. Subtracting the finite element equation (3.13) from the weak form of the Stokes
equations (3.2) and using ∇ · u = 0 gives the error equation
(
∇(
u− uh)
,∇vh)
−(
∇ · vh, p− ph)
+(
∇ ·(
u− uh)
, qh)
= 0
for all(
vh, qh)
∈ V h×Qh. Using (5.60) and this equation, one gets by applying integrationby parts and using ∇ · u = 0
(f ,v)− (∇uh,∇v) + (∇ · v, ph)− (∇ · uh, q)
=(
∇(
u− uh)
,∇(
v − vh))
−(
∇ ·(
v − vh)
, p− ph)
+(
∇ ·(
u− uh)
, q − qh)
=(
∇u,∇(
v − vh))
−(
∇ ·(
v − vh)
, p)
−∑
K∈T h
∫
∂K
(
∇uhn∂K
)
·(
v − vh)
ds+∑
K∈T h
(
∆uh,v − vh)
K
+∑
K∈T h
∫
∂K
ph(
v − vh)
· n∂K ds−∑
K∈T h
(
∇ph,v − vh)
K−(
∇ · uh, q − qh)
for all (v, q) ∈ V × Q and all(
vh, qh)
∈ V h × Qh. Taking now vh = PhClev the Clement
interpolant of v which preserves homogeneous Dirichlet boundary conditions, see Re-mark C.22, using that (u, p) solves the Stokes equations, writing the integrals on thefaces with jumps, and using that uh is discretely divergence-free leads to
(f ,v)− (∇uh,∇v) + (∇ · v, ph)− (∇ · uh, q)
=∑
K∈T h
[
(
Phf +∆uh −∇ph,v − PhClev
)
K+(
f − Phf ,v − PhClev
)
K−(
∇ · uh, q)
K
]
+∑
E∈Eh
([∣
∣
(
−∇uh + phI)
nE
∣
∣
]
E,v − Ph
Clev)
E, (5.64)
where the jumps are defined in Remark 2.52. Note that for edges on the Dirichlet bound-ary it is v = Ph
Clev. In the next step, all terms are estimated with the Cauchy–Schwarz

250 5 The Steady-State Navier–Stokes Equations
inequality (A.8) and the interpolation estimate (C.7)
∑
K∈T h
(
Phf +∆uh −∇ph,v − PhClev
)
K
≤ C∑
K∈T h
hK
∥
∥Phf +∆uh −∇ph∥
∥
L2(K)‖∇v‖L2(K)
≤ C
∑
K∈T h
h2K
∥
∥rhK
(
uh, ph)∥
∥
2
L2(K)
1/2
‖∇v‖L2(Ω) ,
∑
K∈T h
(
f − Phf ,v − PhClev
)
K≤ C
∑
K∈T h
h2K
∥
∥f − Phf∥
∥
2
L2(K)
1/2
‖∇v‖L2(Ω) ,
∑
K∈T h
(
∇ · uh, q)
K≤
∑
K∈T h
∥
∥∇ · uh∥
∥
2
L2(K)
1/2
‖q‖L2(Ω) ,
and with the interpolation estimate (??)
∑
E∈Eh
([∣
∣
(
−∇uh + phI)
nE
∣
∣
]
E,v − Ph
Clev)
E
≤ C
∑
E∈Eh
hE
∥
∥rhE
(
uh, ph)∥
∥
2
L2(E)
1/2
‖∇v‖L2(Ω) .
Inserting all estimates into (5.64) and observing that interior faces belong to two meshcells leads to
(f ,v)− (∇uh,∇v) + (∇ · v, ph)− (∇ · uh, q)
≤ C
(
∑
K∈T h
h2K
∥
∥rhK
(
uh, ph)∥
∥
2
L2(K)+∥
∥∇ · uh∥
∥
2
L2(K)+ h2
K
∥
∥f − Phf∥
∥
2
L2(K)
+1
2
∑
E⊂∂K,E∈Eh
hE
∥
∥rhE
(
uh, ph)∥
∥
2
L2(E)
)1/2(
‖∇v‖L2(Ω) + ‖q‖L2(Ω)
)
.
Now, the a posteriori error estimate (5.63) follows directly from (5.59).
Remark 5.47. On the global upper estimate.
• The constant on the right-hand side of (5.63) depends on the constants ofthe local interpolation estimates (C.7), (??) and on β−1
is,Bab. The inf-supconstant is related to the stability of the problem. Studies of the size ofconstants in interpolation estimates can be found, e.g., in Carstensen andFunken (2000). more details
• For problems with non-homogeneous Dirichlet boundary conditions, aninterpolation operator is used in the analysis, instead of the Clement op-erator, which preserves these condition, usually the Scott–Zhang operator.
• In the case of do-nothing or homogeneous natural boundary conditions(1.30) on some part Γoutf of the boundary, the error estimator ηK has tobe extended by the term

5.4 A Posteriori Error Estimates 251
∑
E⊂∂K,E⊂Γoutf
hE∥
∥rhE(
uh, ph)∥
∥
2
L2(E)
within the parentheses, where the jump in rhE(
uh, ph)
is just the differ-ence of the boundary condition satisfied by the finite element approxima-tion and the homogeneous boundary condition prescribed for the contin-uous problem.
• One can find the definition of the local estimator ηK also without thefactor 1/2 in front of the edge residuals. citation? This change of ηKchanges only the constant in the estimate (5.63).
2
Remark 5.48. Principal way for obtaining a local lower estimate of form(5.57). For obtaining a local lower estimate of form (5.57), appropriate testfunctions are used in the continuous Stokes equations (3.2). These functionsare defined with the help of mesh cell bubble functions and edge bubblefunctions. 2
Lemma 5.49. Local estimates for bubble functions. Let φhK(x) be a cellbubble function, i.e., φK(x) is polynomial which is positive in the interior ofK, which vanishes on ∂K and whose support is K. Then, for all polynomialsvh(x) on K the following estimates hold
C−1∥
∥vh∥
∥
2
L2(K)≤(
vh, vhφhK)
K≤ C
∥
∥vh∥
∥
2
L2(K), (5.65)
C−1∥
∥vh∥
∥
L2(K)≤∥
∥vhφhK∥
∥
L2(K)+ hK
∥
∥∇(vhφhK)∥
∥
L2(K)
≤ C∥
∥vh∥
∥
L2(K), (5.66)
where C is independent of vh and hK .Let φhE(x) be a face bubble function, i.e., φhE(x) is continuous, it is a
polynomial on both mesh cells K1, K2 which share the face E, it is positivein ωE = K1 ∪K2, it vanishes on the boundary of ωE, and its support is ωE.Then, for all polynomials vh on Ki, i ∈ 1, 2, one has the estimates
C−1∥
∥vh∥
∥
2
L2(E)≤(
vh, vhφhE)
E≤ C
∥
∥vh∥
∥
2
L2(E), (5.67)
h−1/2Ki
∥
∥vhφhE∥
∥
L2(Ki)+ h
1/2Ki
∥
∥∇(vhφhE)∥
∥
L2(Ki)≤ C
∥
∥vh∥
∥
L2(E), (5.68)
where C is independent of vh and hKi.
Proof. The proof of these estimates can be found in (Verfurth, 1994, Theorem 2.2) and(Verfurth, 1994, Theorem 2.4). work out?
Lemma 5.50. Local estimate for the mesh cell residual. Under theassumption of Theorem 5.46, it is

252 5 The Steady-State Navier–Stokes Equations
hK∥
∥rhK(
uh, ph)∥
∥
L2(K)≤ C
(
∥
∥∇(u− uh)∥
∥
L2(K)+∥
∥p− ph∥
∥
L2(K)
+hK∥
∥f − Phf∥
∥
L2(K)
)
, (5.69)
with C independent of the mesh width and the solution.
Proof. Considering a vector-valued version of (5.65) and choosing rhK
(
uh, ph)
as poly-
nomial, which will be abbreviated in the proof by rhK , gives
∥
∥rhK
∥
∥
2
L2(K)≤ C
(
rhK , φh
KrhK
)
K. (5.70)
Now, φhKrh
K can be extended off K by zero which gives a function in V and which will bedenoted by the same symbol. Using
(
φhKrh
K , 0)
as test function in (3.2) gives
(
∇u,∇(
φhKrh
K
))
−(
∇ ·(
φhKrh
K
)
, p)
=(
f , φhKrh
K
)
.
Adding and subtracting terms and applying integration by parts, using the definition (5.61)
of the mesh cell residual, and observing that φhKrh
K vanishes on ∂K yields
(
∇(u− uh),∇(φhKrh
K))
−(
∇ ·(
φhKrh
K
)
, p− ph)
=(
Phf , φhKrh
K
)
+(
f − Phf , φhKrh
K
)
−(
∇uh,∇(φhKrh
K
)
+(
∇ ·(
φhKrh
K
)
, ph)
= (rhK , φh
KrhK)K +
(
f − Phf , φhKrh
K
)
K.
Inserting this identity into (5.70) applying the Cauchy–Schwarz inequality (A.8), (2.39),and (5.66) leads to
∥
∥rhK
∥
∥
2
L2(K)
≤ C(
∥
∥∇(u− uh)∥
∥
L2(K)
∥
∥∇(φhKrh
K)∥
∥
L2(K)+∥
∥p− ph∥
∥
L2(K)
∥
∥∇(φhKrh
K)∥
∥
L2(K)
+∥
∥f − Phf∥
∥
L2(K)
∥
∥φhKrh
K
∥
∥
L2(K)
)
≤ C(
h−1K
∥
∥∇(u− uh)∥
∥
L2(K)+ h−1
K
∥
∥p− ph∥
∥
L2(K)+∥
∥f − Phf∥
∥
L2(K)
)
∥
∥rhK
∥
∥
L2(K).
Dividing by h−1K
∥
∥rhK
∥
∥
L2(K)gives the statement of the lemma.
Lemma 5.51. Local estimate for the face residual. With the assumptionof Theorem 5.46, it is
h1/2E
∥
∥rhE(
uh, ph)∥
∥
L2(E)≤ C
(
∥
∥∇(u− uh)∥
∥
L2(ωE)+∥
∥p− ph∥
∥
L2(ωE)
+hE∥
∥f − Phf∥
∥
L2(ωE)
)
, (5.71)
with C independent of the mesh width and the solution.
Proof. Taking the face residual (5.62), abbreviating this function with rhE , and using a
vector-valued version of (5.67) gives
∥
∥rhE
∥
∥
2
L2(E)≤ C
(
rhE , φh
ErhE
)
E. (5.72)
This function φhErh
E can be extended to a function in V , which is denoted with the samesymbol, by setting φh
ErhE outside ωE to zero. Now, the test function
(
φhErh
E , 0)
is applied

5.4 A Posteriori Error Estimates 253
in the Stokes equations (3.2) yielding
(
∇u,∇(
φhErh
E
))
−(
∇ ·(
φhErh
E
)
, p)
=(
f , φhErh
E
)
.
Adding and subtracting terms and applying integration by parts, noting that φhErh
E van-
ishes on the boundary of ωE and outside ωE leads to
(
∇(u− uh),∇(φhErh
E))
−(
∇ ·(
φhErh
E
)
, p− ph)
=(
Phf , φhErh
E
)
+(
f − Phf , φhErh
E
)
−(
∇uh,∇(
φhErh
E
))
+(
∇ ·(
φhErh
E
)
, ph)
=∑
K∈ωE
[(
rhK , φh
ErhE
)
K+(
f − Phf , φhErh
E
)
K
]
+(
rhE , φh
ErhE
)
E.
This identity is inserted into (5.72). With the Cauchy–Schwarz inequality (A.8), estimate(2.39), and (5.68), one obtains
∥
∥rhE
∥
∥
2
L2(E)
≤ C(
∥
∥∇(u− uh)∥
∥
L2(ωE)
∥
∥∇(φhErh
E)∥
∥
L2(ωE)+∥
∥p− ph∥
∥
L2(ωE)
∥
∥∇(φhErh
E)∥
∥
L2(ωE)
+∥
∥rhK
∥
∥
L2(ωE)
∥
∥φhErh
E
∥
∥
L2(ωE)+∥
∥f − Phf∥
∥
L2(ωE)
∥
∥φhErh
E
∥
∥
L2(ωE)
)
≤ C(
h−1/2E
∥
∥∇(u− uh)∥
∥
L2(ωE)+ h
−1/2E
∥
∥p− ph∥
∥
L2(ωE)+ h
1/2E
∥
∥rhK
∥
∥
L2(ωE)
+h1/2E
∥
∥f − Phf∥
∥
L2(ωE)
)
∥
∥rhE
∥
∥
L2(ωE).
From the quasi-uniformity of the triangulation it follows that for each mesh cell K itsdiameter hK can be estimated from below and above by a constant times hE , where theconstant is independent of the triangulation, the concrete mesh cells, and of the edges.
Using this equivalence, dividing by h−1/2E
∥
∥rhE
∥
∥
L2(ωE), and inserting estimate (5.71) gives
the estimate for the face residual.
Theorem 5.52. Local lower, residual-based, a posteriori error esti-
mate for conforming inf-sup stable finite element spaces. Let theassumptions of Theorem 5.46 be satisfied and let
ωK =⋃
K′∈T h,E(K′)⊂E(K) 6=∅
K ′,
then there holds the estimate
ηK ≤ C(
∥
∥∇(u− uh)∥
∥
L2(ωK)+∥
∥p− ph∥
∥
L2(ωK)+ hK
∥
∥f − Phf∥
∥
L2(ωK)
)
,
(5.73)where the constant is independent of the mesh width and of the solution ofthe Stokes equations.
Proof. It is with (2.38)
∥
∥∇ · uh∥
∥
L2(K)=∥
∥∇ ·(
u− uh)∥
∥
L2(K)≤
√d∥
∥∇(
u− uh)∥
∥
L2(K).
With this estimate, estimate (5.69), and estimate (5.71) for all faces of K, (5.73) followsimmediately.

254 5 The Steady-State Navier–Stokes Equations
Remark 5.53. On the local lower estimate (5.73).
• The use of residual-based error estimators for controlling an adaptivemesh refinement is popular in academia. Besides theoretical support, likeestimates (5.73), the rather easy implementation of such estimators is amain reason.
• The constant in estimate (5.73) comes from the estimates for the localbubble functions given in Lemma 5.49.
2
5.4.2 The Dual Weighted Resdidual (DWR) Method
Remark 5.54. Motivation. A posteriori error estimates, like the residual-basedestimate (5.63) for the Stokes equations, posses two drawbacks. First, sucherror estimates can be derived usually only for norms which are in somesense natural in the setup of the problem, like the norm in V or the L2(Ω)norm of the velocity or pressure. The error in such norms is generally not ofmuch interest in applications. There, rather errors of drag and lift coefficientsor other quantities of interest are important. And second, a posteriori errorestimates of type (5.63) have still an unknown factor on the right-hand side,like C in (5.63). This factor contains in particular contributions from thestability of the problem and of local interpolation error estimates, compareRemark 5.47. The interpolation error depends of course on the finite elementspace, which in turn depends on the underlying grid. The stability of theproblem usually depends on coefficients of the problem and this dependencymight be severe, like for convection-dominated convection-diffusion equations,see John (2000) for numerical studies which reveal such dependencies. Allthese unknown dependencies might lead to constants which differ much from1. In such cases, the knowledge of only the computable factor on the right-hand side of residual-based a posteriori error estimates is solely of limiteduse, since it does not allow to draw reliable conclusions on the actual size ofthe error.
The dual weighted residual (DWR) method is an approach which dealswith both drawbacks at the same time. It is a widely applicable approachwhich leads to error estimates for functionals of interest. In a first step, anabstract representation of the error for a functional of interest is derived, seeLemma 5.57. Then, the abstract framework is applied to variational prob-lems, which leads to an error representation that involves a primal residualwhich involves the finite element solution, a dual residual which involves thesolution of the discretized dual of a linearized problem, and a remainder, seeTheorem 5.85. The remainder is considered to be of higher order and thearguments for the evaluation of the residuals will be approximated. Despitethe approximations applied in this methodology, the experience in practiceis that the obtained estimates are usually close to the errors.

5.4 A Posteriori Error Estimates 255
The DWR method was proposed in Becker and Rannacher (1996, 1998),reviews as well as references to previous papers considering a posteriori es-timates for functionals of interest can be found in Becker and Rannacher(2001); Bangerth and Rannacher (2003). 2
Remark 5.55. Abstract setting. First, a general paradigm of a posteriori erroranalysis which is based on duality will be discussed. To this end consider adifferentiable functional L(·) defined on some linear space X. A stationarypoint of this functional is a point x ∈ X for which
L′(x)(y) = 0 ∀ y ∈ X, (5.74)
where the prime refers to the first argument. The Galerkin approximation ofthis problem reads as follows: Find xh ∈ Xh ⊂ X such that
L′(
xh) (
yh)
= 0 ∀ yh ∈ Xh. (5.75)
The second argument of the derivative and of all higher order derivativesis linear. 2
Example 5.56. Energie functional. LetX be a Hilbert space whose inner prod-uct is given by the bilinear form a(·, ·). Then the energy functional is definedby
L(x) =1
2a(x, x)− f(x) x ∈ X,
where f(·) is a continuous, linear functional on X. Consider the function
Φ(ε) = L(x+ εy) ∀ y ∈ X.
Then, x ∈ X is a stationary point if
Φ′(0) = 0 ⇐⇒ L′(x)(y) = 0 ∀ y ∈ X.
A straightforward calculation, using the linearity of f(·), gives
Φ′(0) = limε→0
Φ(ε)− Φ(0)
ε
= limε→0
12a(x, x) + εa(x, y)− ε2
2 a(y, y)− f(x)− εf(y)− 12a(x, x) + f(x)
ε
= limε→0
(
a(x, y)− f(y)−ε
2a(y, y)
)
= a(x, y)− f(y) ∀ y ∈ X.
Thus, a stationary point has to satisfy the equation
a(x, y) = f(y) ∀ y ∈ X ⇐⇒ L′(x)(y) = 0 ∀ y ∈ X.

256 5 The Steady-State Navier–Stokes Equations
Computing the second variation, one finds that the solution of the equationfor a stationary point x is a minimizer of the energy functional. 2
Lemma 5.57. Abstract error representation. Let the functional L(·) bethree times differentiable. Then, for any solutions x of (5.74) and xh of (5.75)there holds the error representation
L(x)− L(
xh)
=1
2L′(
xh) (
x− Ihx)
+R, (5.76)
where Ihx ∈ Xh is arbitrary and with e = x− xh the remainder is given by
R =1
2
∫ 1
0
τ(τ − 1)L′′′(
xh + τe)
(e, e, e) dτ. (5.77)
Proof. With the fundamental theorem of calculus, one obtains
∫ 1
0
L′(
xh + τe)
(e) dτ = L(
xh + τe)
∣
∣
∣
τ=1
τ=0= L
(
xh + e)
− L(
xh)
= L(x)− L(
xh)
. (5.78)
In the next step, the integral will be represented with the help of the trapezoidal rule.
To motivate this representation, let f be a sufficiently smooth function in [t0, t1]. Then,the trunctation error in the trapezoidal rule is given by
∫ t1
t0
f(τ) dτ − f(t1) + f(t0)
2(t1 − t0) .
Applying twice integration by parts and denoting t = (t0 + t1)/2 yields
1
2
∫ t1
t0
(
(
τ − t)2 −
( t1 − t0
2
)2)
f ′′(τ) dτ =
∫ t1
t0
(
t− τ)
f ′(τ) dτ
=
∫ t1
t0
f(τ) dτ − f(t1) + f(t0)
2(t1 − t0) .
Applying the trapezoidal rule to the left-hand side of (5.78) and using the derived formof the truncation error, i.e., setting t1 = 1, t0 = 0, gives
∫ 1
0
L′(
xh + τe)
(e) dτ =L′ (x) (e) + L′
(
xh)
(e)
2+
1
2
∫ 1
0
τ(τ−1)L′′′(
xh + τe)
(e, e, e) dτ.
Since e ∈ X, one gets from (5.74) that L′ (x) (e) = 0. Finally, the linearity of the secondargument of the derivative and (5.75) leads for any Ihx ∈ Xh to
L′(
xh)
(e) = L′(
xh) (
x− Ihx)
+ L′(
xh) (
Ihx− xh)
= L′(
xh) (
x− Ihx)
,
which completes the proof of the lemma.
Remark 5.58. Interpretation of the representation (5.76). The identity (5.76)shows that the error for the functional can be represented with the operatorand the solution of the Galerkin problem (5.75), and a remainder which iscubic in the error. Note that the operator of the Galerkin problem (5.75)

5.4 A Posteriori Error Estimates 257
is linear. However, the test function of the Galerkin operator contains thesolution of the continuous problem (5.74), which is also a linear problem. 2
Remark 5.59. Application of the basic approach to a variational equation. LetV be a linear space and consider the equation: Find u ∈ V such that
a(u; v) = a(u)(v) = f(v) ∀ v ∈ V, (5.79)
where a(·)(·) : V × V → R is a differentiable form which is linear in thesecond argument and f(·) : V → R is a continuous linear functional. LetV h ⊂ V be a subspace, then the Galerkin approximation of (5.79) reads asfollows: Find uh ∈ V h such that
a(
uh)(vh)
= f(
vh)
∀ vh ∈ V h. (5.80)
Denote by J(·) : V → R the functional of interest whose errorJ(u) − J
(
uh)
should be minimized. To embed this problem into the gen-eral framework derived so far, one considers the optimization problem
J(u) → min, a(u)(v) = f(v) ∀ v ∈ V.
If (5.79) has a unique solution, then the optimization problem is trivial sincein this case there is just one argument for the functional. This methodologycan be also applied for problems with non-unique solutions, like eigenvalueproblems.
Next, the Euler–Lagrange approach for deriving conditions for the solu-tion of the optimization problem is applied. To this end, one considers theLagrangian functional
L(u, z) = J(u) + f(z)− a(u)(z),
where z ∈ V is called adjoint variable. A necessary condition for a minimizeris that it is a stationary point, i.e., there hold
0 = ∂uL(u, z) = J ′(u)(w)− a′(u)(w, z) ∀ w ∈ V,0 = ∂zL(u, z) = f(v)− a(u)(v) ∀ v ∈ V.
(5.81)
In the second relation, the linearity of f(·) was used such that the secondcondition is just (5.79). Equation (5.81) is called the dual problem associatedto the functional J(·). Again, one considers the Galerkin approximations ofthe two conditions: Find
(
uh, zh)
∈ V h × V h such that
a′(
uh)(wh, zh)
= J ′(
uh) (
wh)
∀ wh ∈ V h,a(
uh)(vh)
= f(
vh)
∀ vh ∈ V h.(5.82)
With the Galerkin solution, one defines the so-called primal residual
ρ : V → V ′, ρ(·) = f(·)− a(
uh)
(·) , (5.83)

258 5 The Steady-State Navier–Stokes Equations
and the dual residual
ρ∗ : V → V ′, J ′(
uh)
(·)− a′(
uh) (
·, zh)
. (5.84)
2
Theorem 5.60. Error representation. Let the form a(·)(·) and the func-tional J(·) be three times differentiable, let (u, z) be any solution of (5.81) andlet(
uh, zh)
be any solution of (5.82). Then there is the error representation
J(u)− J(
uh)
=1
2ρ(
z − Ihz)
+1
2ρ∗(
u− Ihu)
+Ra, (5.85)
where Ihz, Ihu ∈ V h are arbitrary functions. Denoting e = u− uh and e∗ =z − zh, the remainder is given by
Ra =1
2
∫ 1
0
τ(τ − 1)[
J ′′′(
uh + τe)
− a′′′(
uh + τe) (
e, e, e, zh + τe∗)
−3a′′(
uh + τe)
(e, e, e∗)]
dτ.
Proof. This situation will be embedded into the general framework of Lemma 5.57. To thisend, one sets X = V × V , Xh = V h × V h, x = (u, z), xh =
(
uh, zh)
, and L(x) = L(u, z).Then, using the definition of the Lagrangian functional, the total derivative at xh is givenby
L′(
xh)
(vu, vz) = ∂uL(
uh, zh)
(vu) + ∂zL(
uh, zh)
(vz)
= J ′(
uh)
(vu)− a′(
uh) (
vu, zh)
+ f (vz)− a(
uh)
(vz) (5.86)
for arbitrary (vu, vz) ∈ X. Again, the linearity of f(·) and the second argument of a(·)(·)was used. The application of (5.81), (5.82), (5.76), (5.86), (5.83), and (5.84) yields
J(u)− J(
uh)
= J(u) + f(z)− a(u)(z)−(
J(
uh)
+ f(
zh)
− a(
uh) (
zh))
= L(x)− L(
xh)
=1
2L′(
xh) (
x− Ihx)
+R
=1
2
(
J ′(
uh) (
u− Ihu)
− a′(
uh) (
u− Ihu, zh)
+ f(
z − Ihz)
− a(
uh) (
z − Ihz))
+R
=1
2
(
ρ(
z − Ihz)
+ ρ∗(
u− Ihu))
+R,
with arbitrary(
Ihu, Ihz)
∈ Xh. The general form (5.77) of the remainder requires tocompute the third derivative of L(x) = L(u, z). Formally, one has
L′′′ = ∂uuuL+ 3∂uuzL+ ∂uzzL+ ∂zzzL.
Since L depends only linearly on z, the last two terms vanish. The derivative of the othertwo terms at the required point
(
xh + τ (e, e∗))
((e, e∗) , (e, e∗) , (e, e∗)) gives just the termsin Ra

5.4 A Posteriori Error Estimates 259
L′′′(
xh + τ (e, e∗))
((e, e∗) , (e, e∗) , (e, e∗))
= J ′′′(
uh + τe)
− a′′′(
uh + τe) (
e, e, e, zh + τe∗)
− 3a′′(
uh + τe)
(e, e, e∗) . (5.87)
For the second term on the left-hand side, the three derivatives with respect to u lead tothree times the argument e and for the last term, the two derivatives with respect to u andthe last derivative with respect to z lead to twice the argument e and once the argumente∗. Note that the prime refers only to the first argument of a(·)(·), which gives the lastterm in (5.87).
Remark 5.61. Linear variational problem and linear functional. Consider alinear variational problem
a(u)(v) = a(u, v) = f(v) ∀ v ∈ V
and the corresponding Galerkin approximation
a(
uh, vh)
= f(
vh)
∀ vh ∈ V h.
Subtracting both equations, one gets the Galerkin orthogonality
a(
u− uh, vh)
= 0 ∀ vh ∈ V h.
Since a′(
uh) (
·, zh)
= a(
·, zh)
and J ′(
uh)
(·) = J(·), one obtains with theGalerkin orthogonality, since zh ∈ V h, the linearity of the functional, andIhu = uh
ρ∗(
u− Ihu)
= J (u)− a(
u, zh)
− J(
uh)
+ a(
uh, zh)
= J(
u− uh)
= J(e).
Inserting this expression into the error representation (5.85) and observingthat the remainder vanishes, since all higher order derivatives of the varia-tional form and the functional vanish, yields
J(u)− J(
uh)
= J(e) = ρ(
z − Ihz)
.
Thus, for this special case one needs to compute only the primal residual,evaluated for the difference of the solution of the dual problem and an arbi-trary interpolation. 2
Remark 5.62. Dual linearized problem for the steady-state Navier–Stokes equa-tions. Consider the Navier–Stokes equations in Vdiv and let w ∈ Vdiv be anarbitrary element. Then, the linearization of the Navier–Stokes equations atw is given by the left-hand side of (5.55), which reads as follows
a(u,v) + n (w,u,v) + n (u,w,v) ∀ v ∈ Vdiv. (5.88)
Here, u ∈ Vdiv is the solution of the Navier–Stokes equations. For the dualproblem, ansatz and test functions change their role, such that the left-handside of the dual problem is

260 5 The Steady-State Navier–Stokes Equations
a(v,φ) + n (w,v,φ) + n (v,w,φ) ∀ v ∈ Vdiv, (5.89)
where φ ∈ Vdiv is the solution of the dual problem for a given right-handside. For illustrating which type of problem one has to solve as dual problem,it is of advantage to write the forms in the usual form, i.e., such that the testfunction is in the last argument. Since the viscous term is symmetric, it is
a(v,φ) = a(φ,v).
For the second term of (5.89), one obtains with the product rule, see (1.24),w ∈ Vdiv, integration by parts, and a direct calculation
n (w,v,φ) = ((w · ∇)v,φ) =(
∇ ·(
vwT)
,φ)
− ((∇ ·w)v,φ)
= −(
vwT ,∇φ)
= − ((w · ∇)φ,v) = −n (w,φ,v) ,
where the direct calculation gives
(
vwT ,∇φ)
=
v1w1 v1w2 v1w3
v2w1 v2w2 v2w3
v3w1 v3w2 v3w3
,
∂xφ1 ∂yφ1 ∂zφ1∂xφ2 ∂yφ2 ∂zφ2∂xφ3 ∂yφ3 ∂zφ3
=
∫
Ω
[
v1w1∂xφ1 + v1w2∂yφ1 + v1w3∂zφ1 + v2w1∂xφ2 + v2w2∂yφ2
+v2w3∂zφ2 + v3w1∂xφ3 + v3w2∂yφ3 + v3w3∂zφ3
]
dx,
and
((w · ∇)φ,v)
=
w1∂xφ1 + w2∂yφ1 + w3∂zφ1w1∂xφ2 + w2∂yφ2 + w3∂zφ2w1∂xφ3 + w2∂yφ3 + w3∂zφ3
,
v1v2v3
=
∫
Ω
[
v1w1∂xφ1 + v1w2∂yφ1 + v1w3∂zφ1 + v2w1∂xφ2 + v2w2∂yφ2
+v2w3∂zφ2 + v3w1∂xφ3 + v3w2∂yφ3 + v3w3∂zφ3
]
dx.
For the last term of (5.89), a direct calculation yields
n (v,w,φ) =(
(∇w)Tφ,v
)
,
where the details of this calculation are as follows

5.4 A Posteriori Error Estimates 261
n (v,w,φ)
= ((v · ∇)w,φ)∫
Ω
[
v1∂xw1φ1 + v2∂yw1φ1 + v3∂zw1φ1 + v1∂xw2φ2 + v2∂yw2φ2
+v3∂zw2φ2 + v1∂xw3φ3 + v2∂yw3φ3 + v3∂zw3φ3
]
dx
and(
(∇w)Tφ,v
)
=
∂xw1φ1 + ∂xw2φ2 + ∂xw3φ3∂yw1φ1 + ∂yw2φ2 + ∂yw3φ3∂zw1φ1 + ∂zw2φ2 + ∂zw3φ3
,
v1v2v3
=
∫
Ω
[
v1∂xw1φ1 + v1∂xw2φ2 + v1∂xw3φ3 + v2∂yw1φ1 + v2∂yw2φ2
+v2∂yw3φ3 + v3∂zw1φ1 + v3∂zw2φ2 + v3∂zw3φ3
]
dx.
Summerizing the terms, one finds that the left-hand side of the dual linearizedproblem (5.89) can be written in the form
a(φ,v)− n (w,φ,v) +(
(∇w)Tφ,v
)
, (5.90)
which corresponds to the strong formulation
−ν∆φ− (w · ∇)φ+ (∇w)Tφ.
Analogously to the linearized Navier–Stokes problem (5.88) there is a viscousterm, a convective term, and a reactive term. However the convection field ofthe dual problem (5.90) is the negative of the convection field of the linearizedNavier–Stokes problem (5.88). 2
Remark 5.63. Practical aspects.
• The computation of the residuals on the right-hand side of (5.85) requiresthe knowledge of u, z, uh, and zh. The solutions of the discrete problemsappear in the definition of the residuals (5.83) and (5.84). In practice, itwill not be possible to solve the continuous problems for obtaining u undz. However, having computed uh, the discretized dual problem (5.82)
a′(
uh)(wh, zh)
= J ′(
uh) (
wh)
∀ wh ∈ V h,
can be solved such that uh and zh are available.If a coarse grid is available, then one can apply a local post-processing, i.e.,a patchwise interpolation into a higher order finite element space on thecoarser grid to compute functions I2hhou
h and I2hho zh. With these functions,
one approximates in (5.85)

262 5 The Steady-State Navier–Stokes Equations
(
z − Ihz)
|K ≈(
z − Ihz)
|K :=(
I2hho zh − zh
)
|K , ∀ K ∈ T h,(
u− Ihu)
|K ≈(
u− Ihu)
|K :=(
I2hhouh − uh
)
|K , ∀ K ∈ T h.
references for NSE and alternative ways• The remainder Ra in (5.85) is usually neglected.• The dual problem is linear, i.e., for nonlinear problems like the stationaryNavier–Stokes equations, the costs of solving the dual problem are of theorder of performing one step in their iterative solution.
some citations with applications 2