Chapter 9, Torsion of Thin-Walled Tubes - ase.uc.edupnagy/ClassNotes/AEEM6001 Advanced Strength...
15
Chapter 9 Torsion of Thin-Walled Tubes Summary of Saint-Venant Torsion Theory Warping function, Ψ shear stress ( ) xy G z y ∂Ψ τ = β − ∂ , ( ) xz G y z ∂Ψ τ = β + ∂ compatibility relationship automatic equilibrium equations 2 0 ∇ Ψ= boundary conditions 0 xy xz dz dy ds ds τ −τ = 2 2 1 ( ) 2 dz dy d y z y ds z ds ds ∂Ψ ∂Ψ − = + ∂ ∂ torque ( ) xz xy A T y z dA = τ −τ ∫∫ ( ) A T G y z dA G J z y ∂Ψ ∂Ψ = β − + β ∫∫ ∂ ∂ Prandtl stress function, φ shear stress xy z ∂φ τ = ∂ , xz y ∂φ τ =− ∂ compatibility relationship 2 2 G ∇φ =− β equilibrium equations automatic boundary conditions 0 d φ = torque 2 A T dA = φ ∫∫
Transcript of Chapter 9, Torsion of Thin-Walled Tubes - ase.uc.edupnagy/ClassNotes/AEEM6001 Advanced Strength...

Chapter 9 Torsion of Thin-Walled Tubes
Summary of Saint-Venant Torsion Theory
Warping function, Ψ
shear stress ( )xy G zy
∂Ψτ = β −
∂, ( )xz G y
z∂Ψ
τ = β +∂
compatibility relationship automatic
equilibrium equations 2 0∇ Ψ =
boundary conditions 0xy xzdz dyds ds
τ − τ =
2 21 ( )2
dz dy d y zy ds z ds ds
∂Ψ ∂Ψ− = +
∂ ∂
torque ( )xz xy
AT y z dA= τ − τ∫∫
( )A
T G y z dA G Jz y
∂Ψ ∂Ψ= β − + β∫∫
∂ ∂
Prandtl stress function, φ
shear stress xy z∂φ
τ =∂
, xz y∂φ
τ = −∂
compatibility relationship 2 2G∇ φ = − β
equilibrium equations automatic
boundary conditions 0dφ =
torque 2
AT dA= φ∫∫

Membrane Analogy
y
z
S dy
S dz
yx
S dzS dz
p dy dzy∂ζ∂
dyy y y∂ζ ∂ ∂ζ
+∂ ∂ ∂
ζ(y,z)
y
z
S dy
S dz
yx
S dzS dz
p dy dzy∂ζ∂
dyy y y∂ζ ∂ ∂ζ
+∂ ∂ ∂
ζ(y,z)
sin sin
sin sin 0
xdF S dz S dz dyy y y y
S dy S dy dz p dy dzz z z z
⎛ ⎞ ⎛ ⎞∂ζ ∂ζ ∂ ∂ζ= − + +⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠
∂ζ ∂ζ ∂ ∂ζ⎛ ⎞ ⎛ ⎞− + + + =⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠
2 2
2 2 0S dz dy S dy dz p dy dzy z∂ ζ ∂ ζ
+ + =∂ ∂
2 2
22 2
pSy z
∂ ζ ∂ ζ∇ ζ = + = −
∂ ∂
compatibility relationship:
2 2G∇ φ = − β
boundary condition: 0dφ =

Examples of Solid Cross Sections
elliptical cross section rectangular cross section
triangular cross section I-beam cross section

Discontinuous Boundary
y
z
yx ζ(y,z)
ζ = 0
ζ = ζ1p
y
z
yx ζ(y,z)
ζ = 0
ζ = ζ1p
elliptical cross section with hole rectangular cross section with hole

Narrow Rectangular Cross Section
b >> t
b
t y
z
b
t y
z
equilibrium in x-direction
2
2 0xdF S dy dz p dy dzz∂ ζ
= + =∂
2
2pSz
∂ ζ= −
∂
0p zz S∂ζ
= − +∂
2
2p z CS
ζ = − +
2( ) 0
2 8t pz t C
Sζ =± = − + =
2
8pC tS
=
2
22 4p t zS⎛ ⎞
ζ = −⎜ ⎟⎜ ⎟⎝ ⎠
22
4tG z
⎛ ⎞φ = β −⎜ ⎟⎜ ⎟
⎝ ⎠

torque
2/ 2 2
/ 22 2
4
t
A z t
tT dA G b z dz=−
⎛ ⎞= φ = β −⎜ ⎟∫∫ ∫ ⎜ ⎟
⎝ ⎠
/ 22 3
/ 2
24 3
t
t
t z zT G b−
⎡ ⎤= β −⎢ ⎥
⎢ ⎥⎣ ⎦
313
T G bt= β
shear stress
2xy G zz∂φ
τ = = − β∂
, 0xz y∂φ
τ = − ≈∂
max 23TG tbt
τ = β =
torsional stiffness
( )tTK JG
= =β
31
3K bt=
torque contributions
bulk end( )xy xzA
T z y dA T T= − τ + τ = +∫∫
/ 2 2
bulk/ 2
2t
xyA z t
T z dA G b z dz=−
= − τ = β∫∫ ∫
3bulk
1 16 2
T G bt T= β =

End Correction
h
y = −b/2 y = +b/2
hh
y = −b/2 y = +b/2
h
1D approximation:
22 if and 0 else
4 2 2t b bG z y
⎛ ⎞φ = β − − ≤ ≤ φ =⎜ ⎟⎜ ⎟
⎝ ⎠
0 if and if2 2 2xzb b by y
y y∂φ ∂φ
τ = − = − < < = ±∞ =∂ ∂
∓
2D “tapered” approximation:
2 22 2 2if and else
4 2 2 4
b yt b b tG z h y h G zh
−⎛ ⎞ ⎛ ⎞φ = β − − + ≤ ≤ − φ = β −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
end xzdT y dA= τ
2/ 2 / 2
2end
/ 2 / 24 2
t bxz
A z t b h
t b bT y dA G z dz y dyh=− −
⎡ ⎤⎡ ⎤⎛ ⎞ ⎛ ⎞= τ ≈ β − −⎢ ⎥⎢ ⎥⎜ ⎟∫∫ ∫ ∫ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎢ ⎥⎢ ⎥⎝ ⎠⎣ ⎦ ⎣ ⎦
3end
1 16 2
T G bt T= β =

General Thin-Walled Shapes
TKG
=β
R
tτ
R
tττ
3 31 23 3
K bt R tπ= ≤
b2
b 1
t1
t 2
bt = t(s)
s
b2
b 1
t1
t 2
b2
b 1
t1
t 2
bt = t(s)
s
bt = t(s)
s
31
13
ni i
iK b t
== ∑ 3
0
1 ( )3
bK t s ds= ∫

Single-Cell Thin-Walled Tube
y
L
zx
T
A
D
B
C
t
τ1 τ2A
D
B
C
dx
t1
t2t
P
dΓ
ds
q ds
r
y
L
zx
T
A
D
B
C
ty
L
zx
T
A
D
B
C
t
τ1 τ2A
D
B
C
dx
t1
t2
τ1 τ2A
D
B
C
dx
t1t1
t2t2t
P
dΓ
ds
q ds
rt
P
dΓ
ds
q ds
r
1 1 2 2 0xdF t dx t dx= − τ + τ =
constant shear flow q
1 1 2 2q t t= τ = τ
twisting moment T
dT dF r t ds r q ds r= = τ = 12
d ds rΓ =
2dT q d= Γ
2T q= Γ
2Tq =Γ
surf( )2T
tτ = τ =
Γ

Rate of Twist, Torsional Stiffness
total strain energy over length L
20
12 2V
W T L U U dV Lt dsGτ
= β = = =∫∫∫ ∫
2
212 8
T L dsT LtG
β = ∫Γ
Bredt’s formula
24T ds
tGβ = ∫
Γ
2q dsG t
β = ∫Γ
Example: closed tube of circular cross section:
R
t
R
t
closed24
TG t
β =Γ
, 2 R= π , 2RΓ = π
closed32
TG R t
β =π
closed 32K R t= π

Warping Displacement
z
y
x, uT
T
Q
axis of twist
z
y
x, uT
T
Qaxis of twist
closed cell open cell
z
y
x, uT
T
Q
axis of twist
z
y
x, uT
T
Qaxis of twist
closed cell open cell
closed 32K R t= π
open 3 closed23
K Rt Kπ= <<
closed 2
open 23K RK t
=
given torque T:
closed
22 2T T
t R tτ = =
Γ π
openopensurf 2 2
3 3( )2
T Tbt R t
τ = τ = =π
open
closed 3 Rt
τ=
τ

Multicell Tubes
1 2 0axial wF q L q L q L= − + + = 1 2wq q q= −
1 2 w
CBA ADC ACT q r ds q r ds q r ds= + +∫ ∫ ∫
1 1 2 22( ) 2( ) 2w w w wT q q q= Γ + Γ + Γ − Γ − Γ
1 1 2 22 2T q q= Γ + Γ
For general n-cell cross section:
12
ni i
iT q
== Γ∑
shear flow qi in the ith loop:
12 i
ii i
qG dst
β = ∫Γ

Restraint of Warping
Example: I Sections
symmetric loading u(x = 0, y, z) = 0
top view of the upper flange with differential element
axial view
( )xβ = β

bending of the upper flange: 2
2f fvM E I
x∂
= −∂
3
12f
ft b
I =
2hv = − θ
2
21 12 2f f fM E I h E I h
xx∂ θ ∂β
= =∂∂
2
212
ff f
MV E I h
x x
∂ ∂ β= − = −
∂ ∂
torque due to shear force in the flanges:
f fT V h=
total torque:
2
22
12f fT V h K G E I h K G
x∂ β
= + β = − + β∂
3 22
2 24f
ft b hhJ Iω = =
(called the sectorial area of inertia)
2
2T E J K Gxω∂ β
= − + β∂
2
2K G TE J E Jx ω ω
∂ β− β = −
∂
2 2
22
k TkG Kx
∂ β− β = −
∂ where 2
2(1 )K G KkE J Jω ω
= =+ ν
1 2( ) sinh cosh Tx C kx C kx G Kβ = + +

boundary conditions:
( 0) 0xβ = = (no warping at the center)
0x Lx =
∂β =∂
(no bending moment at the end)
2TC G K= − and 1 tanhTC kLG K=
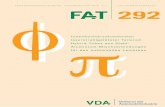
( )( ) tanh sinh cosh 1Tx kL kx kxG Kβ = − +
surf( ) G tτ =τ = β
0
tanh( ) ( ) 1 ( )L T L kL T LL x dx kLG K kL G K
⎛ ⎞θ = β = − = κ∫ ⎜ ⎟⎝ ⎠
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50Normalized Length, kL
Nor
mal
ized
Tw
ist, κ(
kL)
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 500 10 20 30 40 50Normalized Length, kL
Nor
mal
ized
Tw
ist, κ(
kL)
( )( ) tanh cosh sinh2f
fE I hT k
M x kL kx kxG K= −
( )2
( ) tanh sinh cosh2f
fE I hT k
V x kL kx kxG K= − −