Chapter 7curt.nelson/engr228/lecture/chap7.pdf · Engr228 -Chapter 7, Nilsson 10E 12 General RC...
20
Engr228 - Chapter 7, Nilsson 10E 1 Chapter 7 Engr228 Circuit Analysis Dr Curtis Nelson Chapter 7 Objectives • Be able to determine the natural response of both RL and RC circuits; • Be able to determine the step response of both RL and RC circuits.
Transcript of Chapter 7curt.nelson/engr228/lecture/chap7.pdf · Engr228 -Chapter 7, Nilsson 10E 12 General RC...

Engr228 - Chapter 7, Nilsson 10E 1
Chapter 7
Engr228
Circuit Analysis
Dr Curtis Nelson
Chapter 7 Objectives
• Be able to determine the natural response of both RL and RC circuits;
• Be able to determine the step response of both RL and RCcircuits.

Engr228 - Chapter 7, Nilsson 10E 2
Review: DC Characteristics of an Inductor
i(t)
L1V1Ω
i(t)
1V1Ω
dttdiLtv L
L)()( =
When iL(t) is constant, diL(t) = 0 thus, vL(t) = 0.In other words, the inductor can be replaced with a short circuit.
Review: DC Characteristics of a Capacitor
i(t)
1V1Ω
C
i(t)
1V1Ω
dttdvCti C
C)()( =
When vC(t) is constant, dvC(t) = 0 thus, iC(t) = 0.In other words, the capacitor can be replaced with an open circuit.

Engr228 - Chapter 7, Nilsson 10E 3
• Transient response, natural response, homogeneous solution (temporary position change)
– Fades to zero over time.• Forced response, steady-state response, particular solution
(permanent position change)– Follows the input;– Independent of time passed.
Types of First-Order Responses
I am holding a ball with a rope attached. What is the movement of the ball if I move my hand to another point?
Two movements:
1. Oscillation
2. Forced position change
Mechanical Analogue

Engr228 - Chapter 7, Nilsson 10E 4
Forced response Natural response
Mechanical Analogue
Source Free RL Circuits
LR+
-
-
+
i(t)
Inductor L has energy stored so initial current is I0
Similar to a pendulum that is at a height h where the potential energy is nonzero.
height

Engr228 - Chapter 7, Nilsson 10E 5
0)()(
0)()(
=+
=+
tiLR
dttdi
dttdiLtRi
There are 2 ways to solve this first-order differential equation.
LR+
-
-
+
i(t)
Source Free RL Circuits
Method 1Assume solution is of the form where A and s are the constants that need to solved for.
stAeti =)(
Substitute into the equation:stAeti =)( 0)()(=+ ti
LR
dttdi
0)(
0
=+
=+
st
stst
AeLRs
AeLRAse
LRs -=
tLR
Aeti-
=)(
Solving Source Free RL Circuits

Engr228 - Chapter 7, Nilsson 10E 6
Initial condition: 0)0( Ii =tLR
Aeti-
=)(from
AIAeI
==
0
00
ThereforetLR
eIti-
= 0)(
Solving Source Free RL Circuits - continued
Method 2: Direct integration
òò -=
-=
-=
=+
tti
I
dtLR
titdi
dtLR
titdi
tiLR
dttdi
tiLR
dttdi
0
)(
0)()(
)()(
)()(
0)()(
tLR
tti
I
eIti
tLRIti
tLRti
-=
--=-
-=
0
0
0
)(
)(
)0(ln)(ln
)(ln0
Solving Source Free RL Circuits

Engr228 - Chapter 7, Nilsson 10E 7
Time Constant
The ratio L/R is called the time constant and is denoted by the symbol τ (tau).
RL
=t
One time constant is defined as the amount of time required for the output to go from its initial value I0 to 36.8% of its initial value.
ttt
LR
eIeIti--
== 00)(
Units: seconds
368.01 =-e
Time Constant Graph

Engr228 - Chapter 7, Nilsson 10E 8
1st Order Response Observations
• The voltage on a capacitor or the current through an inductor is the same prior to and after a switch at t = 0 seconds because these quantities cannot change instantaneously.
• Resistor voltage (or current) prior to the switch v(0-) can be different from the voltage (or current) after the switch v(0+).
• All voltages and all currents in an RC or RL circuit follow the same natural response e-t/τ.
General RL Circuits
The time constant of a single inductor circuit will be τ = L/Reqwhere Req is the resistance seen by the inductor.
Example: Req=R3+R4+R1R2 / (R1+R2)

Engr228 - Chapter 7, Nilsson 10E 9
Example First-Order RL Circuit
Assume the switch is in the closed position for a long time for t < 0. Find the voltage v(t) at t = 200 ms.
v(t) = -12.99 volts at t = 200 ms
Textbook Problem 7.2 – Nilsson 10th
The switch is opened at t = 0 seconds.a) Find i0(t) for t ≥ 0 seconds.b) Find v0(t) for t ≥ 0+ seconds.
io(t) = 0.6e-750t Ampsv0(t) = -7.20e-750t Volts

Engr228 - Chapter 7, Nilsson 10E 10
As you might expect, source-free RC circuits are an analogue of source-free RL circuits. The derivation for the capacitor voltage is now a node equation rather than a loop equation.
Source-Free RC Circuits
Source-Free RC Circuits
0)()(
0)()(
=+
=+
RCtv
dttdv
dttdvC
Rtv
• To be consistent with the direction of assigned voltage:
• Comparing the last equation to that of the RL circuit, it becomes obvious that the form of the solution is the same with the time constant τ = RC rather than L/R
0)()(=+ ti
LR
dttdi

Engr228 - Chapter 7, Nilsson 10E 11
Comparison Between Source-free RL and RC
t
t
t
CRCt
CC
t
L
tLR
LL
eVeVtv
eIeIti--
--
==
==
00
00
)(
)(
RCRL
C
L
=
=
t
t
• Transient response equations:
• Time constants:
RC Natural Response
The time constant is τ = RC for a first-order RC circuit.

Engr228 - Chapter 7, Nilsson 10E 12
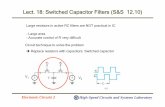
General RC Circuits
The time constant of a single-capacitor circuit will be τ = ReqCwhere Req is the resistance seen by the capacitor.
Example: Req=R2+R1R3 / (R1+R3)
The Source Free RC Circuit
Assume the switch is in the closed position for a long time for t < 0. Find the voltage v(t) at t = 200µS.
v(t) = 321mV at t = 200µS

Engr228 - Chapter 7, Nilsson 10E 13
(a) Find vC(t) for all time in the circuit below.(b) At what time is vC = 0.1vC(0)?
Example Problem
vC(0) = 192VvC = 0.1vC(0) when t = 18.42mS
tCC evtv 125)0()( -=
• Many RL and RC circuits are driven by a DC or an AC source. The complete response of a driven RL or RC circuit is the sum of the transient response and the forced response:
Driven RL and RC Circuits
)()()( tforcedttranti +=

Engr228 - Chapter 7, Nilsson 10E 14
The Step Function u(t)
First, we will define a Step Function:• A Step Function is often used to drive circuits.• The forcing function of 1u(t) represents a function that has
zero value up until t = 0, and a value of 1 forever after.
t=0 t=0
R R1V 1V
t
v(t)
1V
t
v(t)
1V
0V 0V
Unit Step function
Step Function Examples

Engr228 - Chapter 7, Nilsson 10E 15
Suppose the voltage source changes abruptly from 1V to 2V.Does the current change abruptly as well?
I = 1A I = 2A
I
L1V1Ω
I
L2V1Ω
Circuit Example
Current
time
1A
2A
Transient Response + Forced Response
Voltage
time
1V
2V
Example - continued

Engr228 - Chapter 7, Nilsson 10E 16
)()()( tvdttdiLtRi S=+
0)()( =+dttdiLtRi
Complete Response
• The differential equation for the circuit above now becomes
• The transient part of the complete solution is determined by setting the forcing function vS(t) = 0:
Complete Solution for RL Circuits The complete solution is found on page 225 of your text book:
!" # = !%(∞) + !" 0 − !%(∞) +,-. /
!" # = 012 + !" 0 − 012 +,
3" /

Engr228 - Chapter 7, Nilsson 10E 17
Complete Solution for RC Circuits The complete solution is found on page 229 of your text book:
!" # = !%(∞) + !" 0 − !%(∞) +,-./
!" # = 012 + !" 0 − 012 +,-./
Procedure for Solving First-Order Circuits
1. Identify the variable of interest for the circuit. For RC circuits, it is most convenient to choose the capacitive voltage - for RL circuits, it is best to choose the inductor current.
2. Determine the initial value of the variable at t0. Note that if you choose capacitor voltage or inductive current, it is not necessary to distinguish between t = 0- and t = 0+ because these are continuous variables.
3. Calculate the final value of the variable as t → ∞.4. Calculate the time constant of the circuit.

Engr228 - Chapter 7, Nilsson 10E 18
Example Problem
t=0
R=1Ω
2VL=1H
1V
i(t)
The switch is in the position shown for a long time before t = 0. Find i(t).
teti -+=1)(
2A
1Ateti -+=1)(2)( =ti
)(ti
Example Graph

Engr228 - Chapter 7, Nilsson 10E 19
Example Problem 7.52 – Nilsson 10th
vC(t)=10 + (6 – 10)e-160t V
Find vc(t).
Example: RL Circuit with Step Input
Find i(t).
i(t)=25+25(1-e-t/2)u(t) A

Engr228 - Chapter 7, Nilsson 10E 20
Chapter 7 Summary
• Showed how to determine the natural response of both RLand RC circuits;
• Showed how to determine the step response of both RLand RC circuits.