Chapter 10: Radians Rotational Motion s = rθ ω θ...
4
1 Chapter 10: Rotational Motion Brent Royuk Phys-111 Concordia University Angular Ideas from Chp. 6 • Angular distance: Δθ = θ - θ o • Radians – The radian equation: s = rθ • Angular speed and velocity: • v t = r ω ω = Δθ Δt Rolling Motion • Rigid Bodies, Translations and Rotations – A rigid body is a system of particles in which the distances between the particles do not vary. – Analysis is much simpler than non-rigid body – Forces acting through center of gravity produce translations. • Tangential speed is equal to translational speed for a rolling object. • Examples – Rolling without slipping: If ω = .89 s -1 and r = .085 cm, what is v for the rigid body? – What about a book on pencils with same ω and r as above? Rolling Motion • The wheel in the figure is rolling to the right without slipping. • Rank in order, from fastest to slowest, the speeds of the points labeled 1 through 5. Angular Acceleration • Definition: – Uniform angular acceleration • ω = ω o + αt – Units – Vector direction • Tangential Acceleration – a t = rα α = Δω Δt Rotational Kinematics Translational Rotational s = r x = vt = t vt = r v = vo + at = o + t at = r x = v o t + 1 2 at 2 θ = ω o t + 1 2 αt 2 v 2 = v o 2 +2 ax ω 2 = ω o 2 + 2αθ
Transcript of Chapter 10: Radians Rotational Motion s = rθ ω θ...

1
Chapter 10: Rotational Motion
Brent Royuk Phys-111
Concordia University
Angular Ideas from Chp. 6 • Angular distance: Δθ = θ - θo • Radians
– The radian equation: s = rθ • Angular speed and velocity: • vt = r ω
€
ω =Δθ
Δt
Rolling Motion • Rigid Bodies, Translations and Rotations
– A rigid body is a system of particles in which the distances between the particles do not vary.
– Analysis is much simpler than non-rigid body – Forces acting through center of gravity produce
translations. • Tangential speed is equal to translational
speed for a rolling object. • Examples
– Rolling without slipping: If ω = .89 s-1 and r = .085 cm, what is v for the rigid body?
– What about a book on pencils with same ω and r as above?
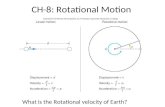
Rolling Motion • The wheel in the figure is rolling to the right
without slipping. • Rank in order, from fastest to slowest, the
speeds of the points labeled 1 through 5.
Angular Acceleration • Definition:
– Uniform angular acceleration • ω = ωo + αt
– Units – Vector direction
• Tangential Acceleration – at = rα
€
α =Δω
Δt
Rotational Kinematics
Translational Rotational s = r x = vt = t vt = r v = vo + at = o + t
at = r
x = vot +12
at 2 θ = ω ot +
12αt 2
v2 = vo
2 +2 ax ω2 = ω o
2 +2αθ

2
Rotational Kinematics • Examples
– A potter’s wheel rotates from rest to 210 rpm in a time of 0.75 s. a) What is the angular acceleration of the wheel during this time? b) How many revolutions does the wheel make during this time interval?
– How many revolutions does it take an angularly accelerating object to accelerate up to 2.8 rad/s at a rate of 0.058 rad/s2?
– What is the angular acceleration of a spinning object that accelerates smoothly from “rest” and makes 4.0 complete revolutions while attaining an angular speed of 5.5 rad/s?
Torque • Definition: • Vector notation- a cross product:
– Compare 0o and 90o – Compare pushing door on outside or inside – Direction: right hand rule – Demo gadget
€
! τ =! r ×! F τ = rF
⊥= rF sinθ
Torque • Lever Arms
– You can either calculate torque as the product of r and or F and . F⊥ r⊥
Rotational Inertia • What is the rotational equivalent of
mass? – Start with F = ma. – Multiply by r, use a = α r – Result: τ= m r2 α
• I = moment of inertia: – Single particles are easy: add them
up. – Continuous mass distributions are
harder: must use calculus – See Figure 10.12 (next slide)
€
I = miri2∑
Moment of Inertia Rotational Dynamics
• Using Newton’s 2nd: • Demo rod • Example: Wrap a string around a 1.5
kg solid sphere with radius 8.0 cm. Pull on the string with a force of 8.0 N. Find the angular acceleration
€
! τ NET = I
! α

3
Rotational Kinetic Energy • Equation: • Examples
– What is the rotational kinetic energy of a 450-g solid sphere with a diameter of 23 cm rotating at rate of 17 rpm?
– What is the total rotational kinetic energy of a 18-kg child riding on the edge of a merry-go-round of mass 160 kg and r = 2.5 m that is rotating with a period of 2.0 s?
• Rolling Objects – For rolling objects: – Examples
• What percentage of the kinetic energy of a rolling ball is rotational? How about a cylinder?
• Compare the speed of a ball rolling down an inclined plane with its speed if it would slide.
– Demo objects: ring and disk, eyeball, soup cans
€
KTOT =12
mv 2 +12
Iω2
€
K =12
Iω2 Angular Momentum
– For a single particle, derive L = m v r !L = I !ω
Angular Momentum • Conservation of Angular Momentum
– Lb = La – Ib ωb = Ia ωa – Pulling string while bob rotates – Spinning skaters – Rotating platform
• What if your initial angular speed is 3.74 rad/s, and by pulling your arms in you change your moment of inertia from 5.33 kg m2 to 1.60 kg m2?
– Spacecraft and cats – Jet engines not bolted too firmly in case of “seize-
up.”
21
Angular Momentum
Lb = La
Ibωb = Iaωa
Rotational Vectors • Direction of the L-vector • Gyroscopic stability
– Football spirals – Bullets
• Directional L conservation – Bicycle wheel on platform
• Precession – ∆L = τ ∆t – Gyroscope – Diving airplanes – Helicopters – Motorcycle turns
Rotational Vectors • Direction of the L-vector • Gyroscopic stability
– Football spirals – Bullets
• Directional L conservation – Bicycle wheel on platform
• Precession – ∆L = τ ∆t – Gyroscope – Diving airplanes – Helicopters – Motorcycle turns

4
The Big Picture Translational Rotational
s = rθ x = vt θ = ωt vt = rω v = vo + at ω = ωo + αt
at = rα
x = vot +12
at 2 θ = ω ot +
12αt2
v2 = vo
2 +2 ax ω2 = ω o
2 +2αθ
! F
! τ =! r ×! F
τ = rF sin θ m
�
I = miri2∑
! F NET =
! F ∑ = m ! a
! τ NET = I ! α
�
W = Fd cosθ W = τθ
K TOT =
12
mv 2 +12
Iω 2 K =
12 mv 2
K
rot= 1
2Iω 2
! p = m ! v
! L = I ! ω
F Δt = m Δv τ Δt = I Δω
�
Pav = ΔEΔt
P = Fv
P = τω