Chapter 1 Solutions40p6zu91z1c3x7lz71846qd1-wpengine.netdna-ssl.com/wp-content/uploads/... ·...
28
Chapter 1 Solutions Problem 1.1 The figure for Problem 1.1 is produced here with various coordinates indicated. System (a) is 2 d-o-f. The coordinates 1 2 and y y could be used or coordinates 1 and y δ . System (b) is 2 d-o-f. The coordinates 1 and y θ will work nicely. System (c) is only 1 d-o-f. The coordinate θ is a good choice. System (d) is 2 d-o-f. The 2 angles measured from vertical is a good choice of coordinates. System (e) is 2 d-o-f. An angle to locate each pendulum is a good choice. System (f) is 2 d-o-f. The coordinate 1 y can be used to locate 1 m coupled with δ to locate 2 m relative to the right end of the lever. The coordinate θ could be used instead of 1 y . Figure S-P1.1 1 m 2 m 1 k 2 k g (a) System only moves vertically () Ft 2 m g (b) Lower mass only moves vertically 1 m l m 2 l a = k a g (c) Pendulum is pinned at top 1 m 2 m 1 l 2 l g (d) k τ 1 θ 2 θ g 1 m 2 m (e) Torsional spring with pendulums at its ends 1 l 2 l 1 m 2 m k a b (f) Lever is massless, pin joint is frictionless, moves vertically 2 m k 1 y 2 y δ 1 y θ θ 1 θ 2 θ 1 y θ δ
Transcript of Chapter 1 Solutions40p6zu91z1c3x7lz71846qd1-wpengine.netdna-ssl.com/wp-content/uploads/... ·...

Chapter 1 Solutions
Problem 1.1
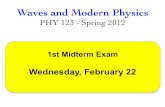
The figure for Problem 1.1 is produced here with various coordinates indicated.
System (a) is 2 d-o-f. The coordinates 1 2 and y y could be used or coordinates 1 and y δ .
System (b) is 2 d-o-f. The coordinates 1 and y θ will work nicely.
System (c) is only 1 d-o-f. The coordinateθ is a good choice.
System (d) is 2 d-o-f. The 2 angles measured from vertical is a good choice of
coordinates.
System (e) is 2 d-o-f. An angle to locate each pendulum is a good choice.
System (f) is 2 d-o-f. The coordinate 1y can be used to locate 1m coupled withδ to
locate 2m relative to the right end of the lever. The coordinateθ could be used instead
of 1y .
Figure S-P1.1
1m
2m
1k
2k
g
(a) System only moves vertically
( )F t
2m g
(b) Lower mass only moves vertically
1m
l
m
2l a=
k
a
g
(c) Pendulum is pinned at top
1m
2m
1l
2l
g
(d)
kτ
1θ
2θ
g
1m
2m
(e) Torsional spring with pendulums
at its ends
1l
2l1
m
2m
k
ab
(f) Lever is massless, pin joint is frictionless, moves vertically2
m
k
1y
2yδ
1y
θ
θ
1θ
2θ
1y
θ
δ

Problem 1.2
The half-car model from Problem 1.2 is reproduced here with sever coordinate choices.
The system 4 d-of and a coordinate is needed to locate each of the point masses and 2
coordinates are needed to locate the rigid body. The inputs ( ) and ( ) ir il
y t y t do not
contribute to the number of degree-of-freedom because these are known functions of
time. One good choice of coordinates is and r l
y y to locate the point masses and
then and g
y θ to locate the c. g. of the body and its rotational orientation. Another choice
for the body coordinates is and br bl
y y to locate the right and left ends of the body.
All displacement coordinates are measured from equilibrium in a gravity field.
Figure S-P1.2
( )ir
y t
( )il
y t
tk
tk
slk
srk
srb
slb
rm
lm
Rigid body of mass,
c. g. moment of ineria,
m
gI
a
b
g
ry
ly
gy
θ
bry
bly

Problem 1.3
A. For problem 1.1(a) using the coordinates indicated, we need to introduce the free
length of the springs in order to properly account for the spring forces.
Figure S-P1.3(a)
B. For Problem 1.1(c) the velocity and acceleration components are shown in terms of the
single coordinateθ and its derivatives. The forces are shown using arrows and symbols
and are associated with each physical location that the system touches its environment.
The relationship of the spring forces
F to the coordinateθ comes from relating the current
length of the spring l to the angleθ . The current length of the spring comes from the
trigonometric relationship, 2 2 2( cos ) ( sin )l a a aθ θ= + +
or
2 (1 cos )l a θ= +
If the free length of the spring is a then the force in the spring is,
[ 2 (1 cos ) ]s
F k a aθ= + −
1m
2m
1k
2k
g1y
2y
1m
2m
1k
2k
1y�
2y�
1m
2m
1k
2k
1y��
2y��
1m
2m
1 1 1( )
flk y y−
2 2 1 2[ ( )]
flk y y y− +
1y��
2y��
1m g
2m g
(a) system (b) Velocity
diagram
(c) Acceleration
diagram(d) Force diagram

Figure S-P1.3(b)
C. This is the solution to Problem 1.1(d). The velocity and acceleration components for
the top pendulum were described using polar coordinates. The components for the
bottom pendulum are also polar coordinates but the velocity and acceleration transfer
formulas were used from Eqs. (1.18)
Figure S-P1.3(c)
m
2l a=
k
a
g
θ
m
k
a
θ 2aθ�
m
k
a
θ2aθ��
22aθ�
m
θ
sF
xF
yF
mg
(a) system (b) Velocity
diagram
(b) Acceleration
diagram
(d) Force
diagram
1m
2m
1l
2l
g
(a) system
1θ
2θ
1m
2m
(b) Velocity
diagram
1m
2m
1m
2m
1 1l θ�
1 1l θ�
2 2l θ�
1 1l �2
1 1l θ�
1 1l �
2
1 1l θ�
2
2 2l θ�2 2l θ��
1m g
2m g
2T
1T
(c) Acceleration
diagram
(d) Force diagram

D. This is the solution to Problem 1.1(e). Polar coordinates are used for both pendulums.
Forces are named at the connection points of the pendulums and the torque or moment
from the torsional spring is exposed.
Figure S-P1.3(d)
E. The solution for Problem 1.3(f) is shown here for small motions of the coordinates.
The velocity and acceleration at the left end of the lever was transferred to the right end
and the relative motion equation from Eq. (1.17) was used to express the velocity and
acceleration of 2m . The forces of contact were named and oriented in part (d) of the
figure.
kτ
1θ
2θ
g
1m
2m1l
2l
kτ
1θ
2θ
1m
2m1l
2l
(a) system
1 1l θ�
2 2l θ�
(b) Velocity diagram
kτ
1θ
2θ
1m
2m2
1 1l θ�
2l
1 1l �
2 2l �2
2 2l θ�
1m
2m
(d) Force diagram
(c) Acceleration diagram
1m g
2m g
1xF
1yF
2yF
2xF2 1( )kττ θ θ= −
2 1( )kττ θ θ= −
1θ
2θ

Figure S-P1.3(e)
1m
2m
k
ab1y
δ
(a) System
1m
2m
k
ab
δ
1y�
1
by
a�
1
by
aδ+ ��
(b) Velocity diagram
1m
2m
k
ab
δ
1y��
1
by
a��
1
by
aδ+ ����
1m
2m
ab
( )flk δ δ−
pF
mF

Problem 1.4
The coordinates shown in Problem 1.4 are used here to express the velocity and
acceleration components assuming small motion of the coordinates. The velocity
components at the right and left ends of the body are shown for convenience in
determining the relative velocity between the body and the mass elements representing
the unsprung mass. The dependence of the spring and damper forces on the motion
coordinates is shown in the figure.
Figure S-P1.4
( )ir
y t
( )il
y t
tk
tk
slk
srk
srb
slb
rm
lm
Rigid body of mass,
c. g. moment of ineria,
m
gI a
b
g
ly
ry
gy
θ
gy�
θ�
ry�
ly�
gy��
�
ry��
ly��
[ ( )]
[ ( )]
rs sr r g
sr r g
F k y y a
b y y a
θ
θ
= − +
+ − + �� �
( )rt t ir rF k y y= −r
mg
lmg
mg
(a) Velocity diagram
(b) Acceleration diagram
(c) Force diagram
gy aθ+ ��
gy bθ− ��
[ ( )]
[ ( )]
ls sl l g
sl l g
F k y y b
b y y b
θ
θ
= − −
+ − − �� �
( )lt t il lF k y y= −
Ground input

Problem 1.5
The transfer velocity formula is used to transfer components from the c. g. to the bottom
corners of the mass. The force components from all the isolation springs are named in
part (c) of the figure and their positive directions are indicated. If the motion of the
coordinates is small, which is a reasonable assumption for engine mounts, then the force
components are related to the coordinates as indicated in the figure. If large motions of
the coordinates are to be considered then it is easiest to express the velocity components
across the springs and let the computer integrate to find the forces. For example, at the
lower right of the mass, the horizontal and vertical velocity components are,
cos sin2
sin cos2
hr g
vr g
wv x h
wv y h
θ θ θ θ
θ θ θ θ
= + −
= + +
� ��
� ��
(S-P1.5-1)
The corresponding force components would then come from,
hr h hr
vr v vr
F k v
F k v
=
=
�
� (S-P1.5-2)
A computational equation solver would then be used to integrate Eqs.(S-P1.5-2) to yield
the spring forces.
Figure S-P1.5
θ
gx
gy
hk
hk
vk v
k
gh
w
gx�
gy�
gy�
gx�
hθ�2
wθ�
gy�
gx�
hθ�
2
wθ�
(a) Velocity diagram
gx��
gy��
(b) acceleration diagram
gx��
gy��
(c) Force diagram
hrF
vrF
vlF
hlF
For small motions of the coordinates
and the positive directions indicated,
( )
( )2
( )
( )2
hr h g
vr v g
hl h g
vl v g
F k x h
wF k y
F k x h
wF k y
θ
θ
θ
θ
= +
= +
= +
= − +

Problem 1.6
Since the center of the cylinder rolls along horizontally, the inertial coordinate x is used to
locate the center of the cylinder and the velocity and acceleration of the center of the
cylinder is and x x� ��respectively. In order to ultimately apply Newton’s laws we need the
acceleration of the c. g. For convenience we employ the coordinateθ to locate the c.g.
We then transfer the velocity from the center to the c. g. using Eqs. (1.18) with the result
being the components shown in Fig. S-P1.6(a). The acceleration components also come
from transferring components from the center to the c. g. where the a�component comes
from theωxr� term and the 2aθ� component comes from the ( )ωx ωxr term.
The force components are the gravity force acting through the c. g. and the components at
the contact point with the ground. The force components have been named and assigned
assumed positive directions.
The system is actually just 1 d-o-f and only one coordinate is needed to describe the
motion. The constraint x Rθ= can be used to eliminate one coordinate or the other.
Figure S-P1.6
θ
R
x
a
g
a a
x�
x�
aθ�
x��
a�
2aθ�
mg
NfF
(a) Velocity diagram (b) Acceleration diagram
(c) Force diagram
Physical system

Problem 1.7
The xy axes attached to the cylinder have angular velocity vector θ=ω � pointing out of the
page using the right hand rule. The velocity of the base of the frame is X=0
v � pointing to
the left. The velocity and acceleration of the cylinder c. g. is then simply X� and
X�� respectively as indicated on the velocity and acceleration diagrams. We use the
attached axes and the relative motion Eqs. (1.17) to express the motion components of the
mass particle. The velocity transfer formula results in the components shown in the
velocity diagram. Each term from Eqs. (1.17) is identified parenthetically in the figure.
Since the coordinateφ is used to locate the mass particle on the cylinder wall it is
convenient to use polar coordinates to describe the motion of the particle relative to the
rotating and translating xy frame.
There are many components comprising the acceleration of the mass particle, but by
methodically identifying each term in the acceleration formula from Eqs. (1.17) and using
our right hands to perform the cross products, each term is identified.
The force components are named and assigned positive directions in part (c) of the figure.
The gravity forces act through the c. g. of the cylinder and on the mass particle. The
normal force 2N is the interaction between the particle and the cylinder wall. It is shown
as equal and opposite components as is required.
Figure S-P1.7
θ
X
R
φ
xy
Physical system
X�
X� Rθ�
Rφ�
( )0v( )ωxr
( )relv
X��
X�� R�
Rφ��
( )0a( )ωxr�
( )rela2Rθ�
( )ωxωxr2Rθφ� �
(2 )relωxv
2Rφ�( )rela cm g
1NfF
mg2N
(a) Velocity diagram
(b) Acceleration diagram
(c) Force diagram

Problem 1.8
The xy axes are attached to the big cylinder and rotating with it. The c. g. of the big
cylinder has the velocity X� and the acceleration X�� . The velocity and acceleration
components of the c. g. of the small cylinder are determined using Eqs. (1.17) and ones
right hand to perform the required cross products. Unlike problem 1.7 where the mass
particle slid without friction on the inner surface of the big cylinder, a rolling friction
force2f
F is required for the small cylinder to roll without slip. This force is shown acting
equal and opposite at the contact point between the small cylinder and the inner surface
of the big cylinder.
This system is actually 2 d-o-f and the constraint X Rθ= can be used to eliminate one or
the other of these coordinates.
In the next chapter we will cover the use of the velocity, acceleration, and force diagrams
in deriving equations of motion. Here it is simply stated that we will need to determine
the moment of the forces acting on the small cylinder about its c. g. and this moment will
go into changing the angular velocity of the small cylinder indicated asc
ω in the physical
system below. We will need to determine how this angular velocity is related to the
coordinates , , and X θ φ . In Figure S-P1.8-2 the small cylinder is isolated and a set of
axes has been attached to the cylinder at the contact point with the big cylinder. These
axes are fixed to the small cylinder and therefore have angular velocityc
ω pointing into
the page according to the right hand rule. By using Eqs. (1.17) we can express the
velocity of the c.g.(p
v ) in terms of the velocity of the contact point (0
v ) and the angular
velocity of the frame (cω ). But we know the velocity of the both the contact point and
the c. g. in terms of the desired coordinates and thus can determine the angular velocity of
the small cylinder in terms of these coordinates. Thus applyingp 0
v = v +ωxr using the
axes shown in Figure S-P1.8-2 we would conclude that,
( ) ( )c
R r R r R rθ φ θ ω− + − = +� � � (S-P1.8-1)
where the left hand side of (S-P1.8-1) isp
v , the first term on the right hand side is0
v , and
the second term on the right isωxr . Note that the X� component cancels from both sides
of the equation. Finally we can solve for the absolute angular velocity of the small
cylinder as,
( )
c
R r
rω φ θ
−= −� � (S-P1.8-2)

Figure S-P1.8-1
Figure S-P1.8-2
θ
X
R
φ
xy
X�
X� ( ) ( )R r θ− ωxr�( )0v
( ) ( )relR r φ− v�
(a) Velocity diagram
X��
X��( ) ( )R r θ− ωxr�� �
( )0a
2 ( ) ( )R r θ−ωxωxr �
2( ) R r θφ− � �
(2 )relωxv
( ) ( )relR r φ− a��
2( ) R r φ− �
( )rel
a
(b) Acceleration diagram1f
F1
N
cm g
mg2
N2f
F
(c) Force diagram
Physical system
cω
cω
X�
x
y
Rθ�
X�( )R r θ− �
( )R r φ− �
r
Point p
Point 0

Problem 1.9
Under the assumption of no slip at the bottom of the cylinder, the system is only 1 d-o-f.
We can use either the coordinate X orθ or, if it is convenient, we can use both coordinates
and eliminate one or the other at the end of the analysis. In the velocity diagram, the
velocity components are shown where the wrapped string comes off the inner radius r .
These components are not needed right now, but will be useful when equations of motion
are derived in the next chapter. The components were determined by imagining a set of
axes attached at the c. g. and rotating with the cylinder. We then apply Eqs. (1.18) with
respect to these axes and transfer the velocity from the c. g. to the desired point on the
rigid body.
Figure S-P1.9
R
F
v
θ
X r
F
or X R�
or X R���
X�rθ�
cm g
NfF
Physical system(a) Velocity diagram
(b) Acceleration diagram
(c) Force diagram
v X rθ= − ��

Problem 1.10
As stated in the problem statement, when 0θ = , x also equal zero and the spring is
relaxed. The distance from the left wall to the cylinder center is D for this relaxed
position. The system is just 1 d-o-f and either the coordinate x orθ can be used to
describe the motion. We can also use both as a convenience and then eliminate one or
the other at the time of analysis. The velocity and acceleration diagrams for the c. g. are
generated by using the transfer velocity formula from Eqs. (1.18) Also shown in the
velocity diagram is the velocity components at the attachment point for the spring.
The force diagram shows the forces at the contact of the cylinder with the ground and
shows an additional force components
F for the spring force. For convenience the
angleα is introduced but it is directly related toθ and can be eliminated from the
formulation when it is convenient.
In the next chapter we will be deriving equations of motion using the diagrams generated
here. We will need to relate the spring force to the coordinateθ in order to complete the
equation formulation. The spring force relationship is developed here just for practice in
recognizing trigonometric relationships.
When the cylinder is rolled to the left as shown below the distance between the cylinder
center and the left wall is D x− . The current length of the spring L is then, 1
2 2 2[( cos ) ( sin ) ]L D x R Rθ θ= − − + (S-P1.10-1)
The force in the spring is then,
( )s fl
F k L L= − (S-P1.10-2)
where the free length of the spring is,
flL D R= − (S-P1.10-3)
We also need the components of the spring force where the horizontal component is
cossh s
F F α= (S-P1.10-4)
and the vertical component is
sinsv s
F F α= (S-P1.10-5)
Finally we need to relateα toθ by recognizing that,
sintan
cos
R
D x R
θα
θ=
− − (S-P1.10-6)
Another approach to obtaining the spring force is to first determine the extension velocity
across the spring from the velocity components at the attachment point. Thus,
sin( ) coss
v R xθ θ α α= + −� � (S-P1.10-7)
Then the rate of change of the spring force becomes,
s sF kv=� (S-P1.10-8)

We then would have the computer integrate this relationship along with the equations of
motion. At any time we can eliminate the coordinate x from the formulation by using the
no slip condition x Rθ= .
Figure S-P1.10
θ
R
x
a
g
k
α
Physical system
x�
x�
aθ�
x�Rθ�
x��
x��
a�
2aθ� mg
N
fFsF
(a) Velocity diagram
(b) Acceleration diagram
(c) Force diagram
D x−

Problem 1.11
The velocity transfer formula from Eqs. (1.18) was used to transfer the velocity
components from the c. g. to the center of each wheel. The cross product terms are
realized by using one’s right hand and crossing the vector−ω pointing out of the page
into the appropriate components of the -vectorr consisting of lengths a and2
wfor the front
wheels and b and2
wfor the rear wheels.
If the sideways velocity of each wheel is constrained to be zero, then
( ) cos ( )sin 02
y x
wv a vω δ ω δ+ − + = at the front/right
( ) cos ( )sin 02
y x
wv a vω δ ω δ+ − − = at the front/left
0y
v bω− = at the rear/right
0y
v bω− = at the rear/left
Figure S-P1.11
a
b xv
yv
ω
xy
X
Y
δ
2
w
θ
xv
yv
ω
xv
yv
xv
yv
xv
yv
xv
yv
aω
aω
2
wω
2
wω
2
wω
2
wω
bω
bω
Physical systemVelocity diagram

Problem 1.12
The only difference between this solution and that for Problem 1.11 is the c. g. velocity
components are oriented in the inertial horizontal and vertical directions. All the cross
product terms are the same and come from appropriate application of Eqs. (1.18). We
should recognize that for inertial coordinates we can substituteX
v X= � andY
v Y= � . If the
sideways velocity at each wheel is constrained to be zero, then the constraint
relationships are,
cos( ) cos sin( ) sin 02
Y X
wv a vθ δ ω δ θ δ ω δ+ + − + − = at the front/right
cos( ) cos sin( ) sin 02
Y X
wv a vθ δ ω δ θ δ ω δ+ + − + + = at the front/left
cos sin 0Y X
v b vθ ω θ− − = at the rear/right
cos sin 0Y X
v b vθ ω θ− − = at the rear/left
Figure S-P1.12
a
bX
v
Yv
ω
X
Y
δ
2
w
θ
ω
aω
aω
2
wω
2
wω
Physical systemVelocity diagram
Xv
Yv
Xv
Yv
Xv
Yv
bω
2
wω
Xv
Yv
bω2
wω
Xv
Yv

Problem 1.13
In the figure below the c. g. velocity components are transferred to the spring attachment
points using the velocity transfer formula from Eqs. (1.18). The cross product terms were
realized by crossing the -vectorω pointing out of the page into the components of
the -vectorr drawn from c. g. out to the spring attachment points. These -vectorsr were
broken into convenient components for taking cross products using the fingers of our
right hands.
The springs are oriented horizontally and vertically so the body fixed components must
be resolved into horizontal vertical directions in order to properly express the velocity
“seen” by each spring. Thus at the right side the horizontal and vertical components are,
( ) cos ( )sin2
( )sin ( )cos2
r
r
h x g y
v x g y
wv v h v
wv v h v
ω θ ω θ
ω θ ω θ
= + − +
= + + +
(S-P1.13-1)
with the horizontal spring positive in compression and the vertical spring positive in
extension. At the left end,
( ) cos ( )sin2
( )sin ( ) cos2
l
l
h x g y
v x g y
wv v h v
wv v h v
ω θ ω θ
ω θ ω θ
= + − −
= + + −
(S-P1.13-2)
with the horizontal spring positive in extension and the vertical spring also positive in
extension.
Figure S-P1.13
θ
hk
hk
vk vk
gh
w
xv
yv
ω
Physical system
θ
xv
yv
ω
xv
yvgh ω
2
wω
xv
yvgh ω
2
wω
(a) Velocity diagram with c. g. components transferred to body fixed directions at the
spring attachment points

Problem 1.14
This rather busy looking figure is the velocity diagram for the car towing a trailer. The
vehicle c. g. body fixed coordinates were first transferred to the front and rear wheels of
the vehicle using the velocity transfer formula from Eqs. (1.18). As always, this action is
carried out by imagining axes attached to the c.g. of the vehicle and moving with the
vehicle. The cross product terms from Eqs. (1.18) are carried out using our right hands
and imagining the -vectorsr broken into appropriate perpendicular components. The c. g.
vehicle components have also been transferred to the hitch point between vehicle and
trailer. We now imagine a frame attached to the trailer with origin at the hitch point and
use the transfer velocity formula once again. This yields the components at the c. g. of
the trailer and at the wheels of the trailer.
If all wheels are constrained to have no sideways velocity the constraint relationships are,
( ) cos ( )sin 02
y c x c
wv a vω δ ω δ+ − + = at the front/right of the vehicle
( ) cos ( )sin 02
y c x c
wv a vω δ ω δ+ − − = at the front/left of the vehicle
0y c
v bω− = at the rear/right and rear/left of the vehicle
( ) cos( ) sin( ) ( ) 0y c t c x t c t
v b v c dω θ θ θ θ ω− − − − − + = at the rear/right and rear/left of the
trailer.
a
bc
ωδ
cθ
c
d
xv
yv
tθ
tcω
xv
yv
caω
2c
wω
xv
yv
caω
2c
wω
xvy
v
cbω2
c
wω
yv
cbω
2c
wω
xv
cbω
xv
yv
cbω
xv
yv
cbω
xv
yv
( )t
c d ω+
2t
wω
cbω
xv
yv
( )t
c d ω+
2t
wω
Figure S-P1.14

Problem 1.15
A. Polar coordinates are used to construct the velocity and acceleration diagrams for the 2
mass particles. The sting in inextensible so the -directionr motion of the mass on the
table is experienced by the hanging mass except for the acceleration component due to
the curved motion of the mass on the table.
B.Since there are no forces acting on the top mass perpendicular to the string, the
acceleration in that direction must be zero, thus,
2 0r rθ θ+ =�� �� (S-P1.15-1)
C. The angular momentum of the top mass is the moment of the momentum vector about
the axes through the hole in the table. The momentum vector is mrθ� pointing
perpendicular to the string and the moment arm has length r . The angular momentum is
officiallyh = rxmv and becomes, 2h mr θ= � in the direction perpendicular to the table top.
Also, since there is no force having a moment with respect to the axes through the hole in
the table top, the angular momentum must be constant or 2 constmr θ =� . Differentiating
this expression with respect to time yields, 22 0rr rθ θ+ =� ��� (S-P1.15-2)
Except for the point 0r = , this expression is identical to Eq. (S-P1.15-1)
r
θ
m
m
X
Y
g
m
m
r�rθ�
r�
m
m
r��r�
r��
2rθ�
2r�
m
m
mg
T
T
Physical system(a) Velocity diagram
(b) Acceleration
diagram
(c) Force diagram

Figure S-P1.15
Problem 1.16
A. Figure S-P1.16-1 shows the requested velocity diagrams. The velocity transfer
formula from Eqs. (1.18) was used in all cases. In (a) and (b) of the figure the velocity
components were transferred from the c. g. to the ends of the rigid body. The -vectorr for
these two coordinate frames is ½ the length of the rigid body.
For part (c) of the figure we attach a frame to the rigid body at the contact point and
recognize that Rθ=0
v � in the direction shown. From Eqs. (1.17) the velocity of the base
of the attached frame is transferred to the c. g. followed by evaluating theωxr term. We
also need to realize that the distance from the c. g. to the contact point is Rθ when the
rigid body rotates without slip on the cylinder. Also, with respect to this attached frame
the c. g. is located by the position vector x Rθ= in the direction indicated. This length
changes with time and thus contributes a relative velocityrel
v x Rθ= = �� as shown. The net
result is that the0
v component and therel
v component cancel and the only remaining
velocity component is Rθθ� oriented perpendicular to the rigid body.
The vertical velocity components at the ends are,
cos2rv
Lv Y θ θ= − �� for part (a) at the right end
cos2lv
Lv Y θ θ= + �� for part (a) at the left end
( ) cos sin2rv y x
Lv v vθ θ θ= − +� for part (b) at the right end
( ) cos sin2lv y x
Lv v vθ θ θ= + +� for part (b) at the left end
( ) cos2rv
Lv Rθ θ θ= − − � for part (c) at the right end
( ) cos2lv
Lv Rθ θ θ= + � for part (c) at the left end

Figure S-P1.16-1
B. The acceleration components using theθ -coordinate is pretty involved. The attached
axes from the velocity diagram is used for the acceleration diagram and all the
components were determined methodically using Eqs.(1.17). Each term in the
component transfer formulas is identified in the figure below. The frame is attached to
the contact point and the contact point has velocity and acceleration as indicated. These
are the components ( ) and ( ) 0 0
v a respectively. These components are transferred to the
c. g. as required. All the components were obtained, term by term, using the right hand to
carry out the cross products. A different frame from which to determine the velocity and
acceleration components would be one attached to the center of the cylinder with the
y axis passing through the contact point and the x axis aligned parallel to the rigid body.
This frame would be defined to track the motion of the rigid body, i.e. the x axis always
remains parallel to the rigid body. From this frame ( ) and ( ) 0 0
v a would both be zero. It
would be a good test to see if you ultimately get the same components using this frame as
were obtained in the figure below.
Rθ
xv
yv
ω θ= �X
Y
k
k
Physical system
RR
X�
X�
Y�
Y�
2
Lθ�
X�
Y�2
Lθ�
RR
(a) Velocity diagram using inertial coordinates
xvyv
xv
yv
2
Lθ�
xvyv
2
Lθ�
(b) Velocity diagram using body fixed coordinates
RR
( )Rθθ ωxr�
( )2
LRθ θ− �
( )2
LRθ θ+ �
(c) Velocity diagram using the -coordinateθ
x
yAttached axes
x ( )Rθ0
v�Rθ�
relv x Rθ= = ��
( )rel
v

Figure S-P1.16-2
RR
X��
Y��
R
Rθθ��2Rθθ�
( )Rθ0
a��
2 Rθ�( )
0a
Rθ��2 Rθ�
( )ωxr�
( )ωxωxr
22Rθ�
(2 )rel
ωxv
R�( )
rela
(a) Acceleration diagram using inertial
coordinates
(b) Acceleration diagram using the - coordinate and the
axes attached to the rigid body at the contact point
θ

Problem 1.17
To obtain the angular momentum about the point 0 we start with the angular momentum
of the dm element about the point 0 ,
dm0 0 i
dh = r xv (S-P1.17-1)
but,
0 gr = r + r (S-P1.17-2)
and,
i gv = v +ωxr (S-P1.17-3)
Substituting into (S-P1.17-1) yields,
( ) ( )
or
g g
g g g g
dm
dm dm dm dm
+ +
+ + +
0
0
dh = r r x v ωxr
dh = r xv r xωxr rxv rxωxr
(S-P1.17-3)
We now integrate to get the total angular momentum where terms that depend on the
respective mass element become part of the integrand, thus,
( )g g g g
dm dm dm dm+ + +∫ ∫ ∫ ∫0H = r xv r xωx r r xv rxωxr (S-P1.17-4)
Making use of 0dm =∫r where r is measured from the c. g. produces the final result,
( )g g
m dm+ ∫0H = r x v rxωxr (S-P1.17-5)
Figure S-P1.17
X
Y
0
gv
iv
dm
ω
gr0r
r
Rigid body of mass,
and c. g. moment of inertia,
m
gI

Problem 1.18
A. Angular momentum is the moment of the momentum vector. The initial angular
momentum with respect to axes through the pivot is the product of the magnitude of the
momentum vector times the moment arm or,
2I g
HH mv= (S-P1.18-1)
with vector direction out of the page as dictated by the right hand rule.
B. From the result of solution to Problem 1.17, the angular momentum just after impact
is the angular momentum of the c. g. plus the angular momentum due to rotation of the
rigid body, thus,
2 2( ) ( )2 2fF g g
H LH mv I ω= + + (S-P1.18-2)
with vector direction out of the page.
C. Polar coordinates dictate that,
2 2( ) ( ) 2 2fg
H Lv ω= + (S-P1.18-3)
Substituting this into (S-P1.18-2) yields,
2 2
0
( ) ( )2 2
or
F g
F
H LH m I
H I
ω
ω
= + +
=
(S-P1.18-4)
where 0I is the moment of inertia about the pivot which comes from using the parallel axis
theorem.
D. Equating the initial and final angular momenta results in,
0
0
2
or
2
g
g
Hmv I
mvH
I
ω
ω
=
=
igv
L
H
Rigid body of mass,
and c. g. moment of inertia,
fgv ω
m
gI
igv
L
H
Rigid body of mass,
and c. g. moment of inertia,
fgv ω
m
gI

Figure S-P1.18
Problem 1.19
A. The angular momentum of the system is the sum of the angular momentum of the
cylinder and angular momentum of the mass. Thus, 2
I g i iH I mRω ω= + (S-P1.19-1)
and the final angular momentum is,
F g f fH I Lmvω= + (S-P1.19-2)
B. For angular momentum conservation, 2( )g i g f f fI mR I Lmv Lmvω ω+ = + = (S-P1.19-3)
if 0f
ω = .
For energy conservation,
2 2 2 2 21 1 1 1( )
2 2 2 2g i g f f f
I mR I mv mvω ω+ = + = (S-P1.19-4)
if 0f
ω = .
Solving (S-P1.19-3) forf
v and substituting into (S-P1.19-4) allows for the final result,
1/ 2
2[1 ]
gI
L RmR
= + (S-P1,19-5)
Figure S-P1.19
m
Pinned cylinder of c. g.
moment of inertia,
and radius,
gI
iω
R
fv
fω
m
L
(a) Initial configuration (b) final configuration

Problem 1.20
A. The figure below shows the required velocity, acceleration, and force components.
Since the inertial position x is one of the coordinates it is straight forward to show the
velocity and acceleration of the bottom of the body. If an axes is imagined to be attached
at the base of the body as shown in the physical system and constrained to execute the
motion of the body, then the transfer formulas of Eqs. (1.18) can be used to obtain the
velocity and acceleration components of the c. g. As always, the cross product terms
come from using our right hands and carrying out the necessary operations. For this
example the angular velocity of the frame and body is θ=ω � pointing into the page. The
force components are shown as perpendicular components at the point of contact with the
ground.
Figure S-P1.20
B. The angular momentum of the body with respect to the inertial axes is the angular
momentum of the c. g. plus the angular momentum due to rotation of the body. For an
angular momentum vector pointing into the page the angular momentum of the c. g. is,
( cos )( cos ) sin ( sin )2 2 2 2
XY g
L L L LH m x m x Iθ θ θ θ θ θ θ= + + + +� � �� (S-P1.20-1)
θ
x
k
X
Y
g
θ
x
k
X
Y
g
θ
X
Y
x�
x�
2
Lθ�
θ
X
Y
x��
x��
2
L�
2
2
Lθ�
θ
X
Y
mg
N
sF kx=
(a) Velocity diagram
Attached axes
(b) Acceleration diagram
(c) Force diagram
Physical system

The last term in this equation is the angular momentum of rotation. The other terms
come from resolving the velocity vector into horizontal and vertical components and then
taking the moment of momentum by multiplying by appropriate moment arm lengths.
The expression above can be simplified a bit. This is left to you.
C. The linear momentum of the body is the momentum of the c. g. For the XY directions
these components are,
( cos )2
sin2
X
Y
Lp m x
Lp m
θ θ
θ θ
= +
= −
��
�
(S-P1.20-2)