
CAPITULO 6 DISEÑO DETALLADO Y...
35
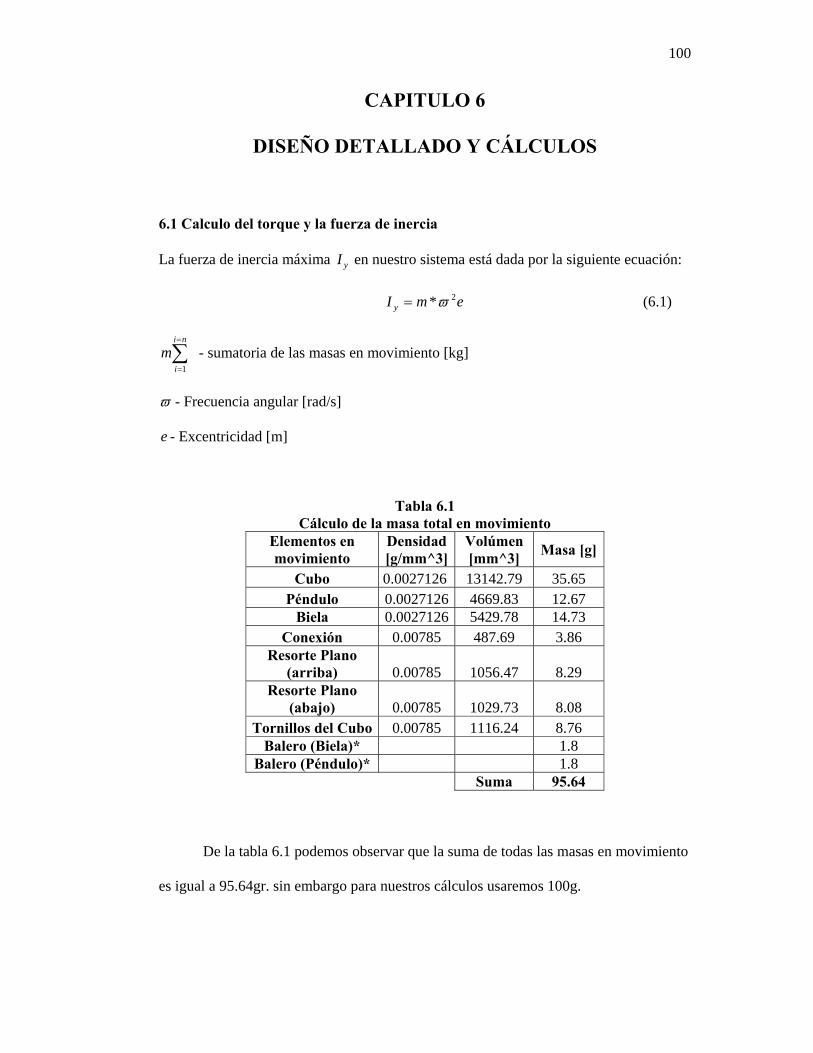
100 CAPITULO 6 DISEÑO DETALLADO Y CÁLCULOS 6.1 Calculo del torque y la fuerza de inercia La fuerza de inercia máxima y I en nuestro sistema está dada por la siguiente ecuación: e m I y 2 *ϖ = (6.1) ∑ = = n i i m 1 - sumatoria de las masas en movimiento [kg] ϖ - Frecuencia angular [rad/s] e - Excentricidad [m] Tabla 6.1 Cálculo de la masa total en movimiento Elementos en movimiento Densidad [g/mm^3] Volúmen [mm^3] Masa [g] Cubo 0.0027126 13142.79 35.65 Péndulo 0.0027126 4669.83 12.67 Biela 0.0027126 5429.78 14.73 Conexión 0.00785 487.69 3.86 Resorte Plano (arriba) 0.00785 1056.47 8.29 Resorte Plano (abajo) 0.00785 1029.73 8.08 Tornillos del Cubo 0.00785 1116.24 8.76 Balero (Biela)* 1.8 Balero (Péndulo)* 1.8 Suma 95.64 De la tabla 6.1 podemos observar que la suma de todas las masas en movimiento es igual a 95.64gr. sin embargo para nuestros cálculos usaremos 100g.
Transcript of CAPITULO 6 DISEÑO DETALLADO Y...
100
CAPITULO 6
DISEÑO DETALLADO Y CÁLCULOS
6.1 Calculo del torque y la fuerza de inercia
La fuerza de inercia máxima yI en nuestro sistema está dada por la siguiente ecuación:
emI y2*ϖ= (6.1)
∑=
=
ni
im
1- sumatoria de las masas en movimiento [kg]
ϖ - Frecuencia angular [rad/s]
e - Excentricidad [m]
Tabla 6.1 Cálculo de la masa total en movimiento
Elementos en movimiento
Densidad [g/mm^3]
Volúmen [mm^3] Masa [g]
Cubo 0.0027126 13142.79 35.65 Péndulo 0.0027126 4669.83 12.67
Biela 0.0027126 5429.78 14.73 Conexión 0.00785 487.69 3.86
Resorte Plano (arriba) 0.00785 1056.47 8.29
Resorte Plano (abajo) 0.00785 1029.73 8.08
Tornillos del Cubo 0.00785 1116.24 8.76 Balero (Biela)* 1.8
Balero (Péndulo)* 1.8 Suma 95.64
De la tabla 6.1 podemos observar que la suma de todas las masas en movimiento
es igual a 95.64gr. sin embargo para nuestros cálculos usaremos 100g.

101
La máxima velocidad angular de nuestro motor es de 1725rpm por lo tanto;
⎥⎦⎤
⎢⎣⎡=
sradrpm
602* πϖ (6.2)
⎥⎦⎤
⎢⎣⎡==
srad64.180
602*1725 πϖ
Teniendo estos datos podemos calcular la máxima fuerza de inercia en nuestro
sistema
mKgI y 016.0*64.180*10. 2= =521N
Esta fuerza de inercia será usada para los cálculos de esfuerzo en los elementos
críticos de la máquina y la elección adecuada del balero.
6.2 Cálculos para la elección del balero
Estimando que la vida útil de diseño de nuestra máquina es de 1500 horas.
El número de revoluciones del diseño del balero será:
⎟⎠⎞
⎜⎝⎛=
hrpmhLd
min60)( (6.3)
dL - número de revoluciones del balero
revh
Ld 155250000min60)1725)(1500( =⎟⎠⎞
⎜⎝⎛=
Ahora calculamos la especificación básica de carga dinámica
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛=
kd
dL
PC
1
610 (6.4)
102
Donde:
dP - Carga de diseño
k - Constante para cálculos hechos con cojinetes de bola
Por lo tanto;
NrevNC 55.28010
1552500002.5231
6 =⎟⎠⎞
⎜⎝⎛=
⎟⎠⎞
⎜⎝⎛
Este valor de fuerza es inferior a nuestra máxima fuerza de inercia en el sistema,
por lo tanto nos encontramos dentro de los márgenes de seguridad.
Las especificaciones del balero usado en la máquina se encuentran en el
Apéndice.
6.3 Cálculo de los esfuerzos en los elementos
6.3.1 Cálculo de los esfuerzos en la biela
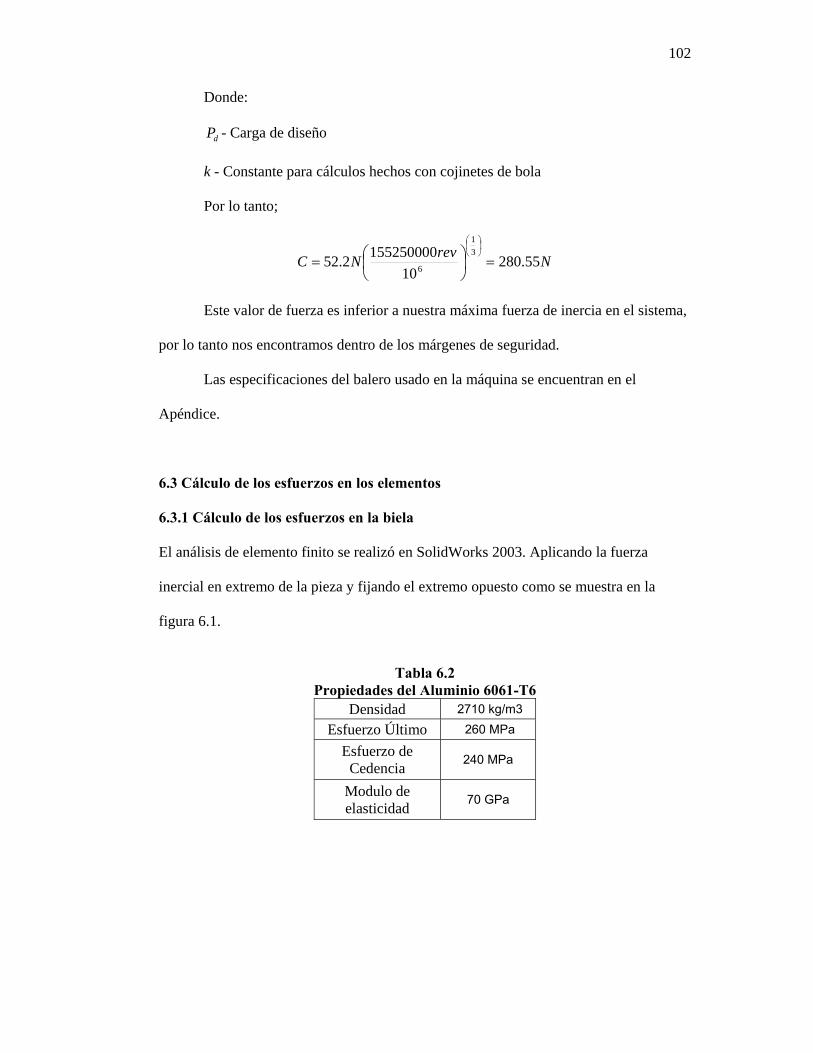
El análisis de elemento finito se realizó en SolidWorks 2003. Aplicando la fuerza
inercial en extremo de la pieza y fijando el extremo opuesto como se muestra en la
figura 6.1.
Tabla 6.2
Propiedades del Aluminio 6061-T6 Densidad 2710 kg/m3
Esfuerzo Último 260 MPa
Esfuerzo de Cedencia 240 MPa
Modulo de elasticidad 70 GPa

103
Figura 6.1 Condiciones iniciales para el análisis de Elemento Finito
Extremo fijo
Carga
104
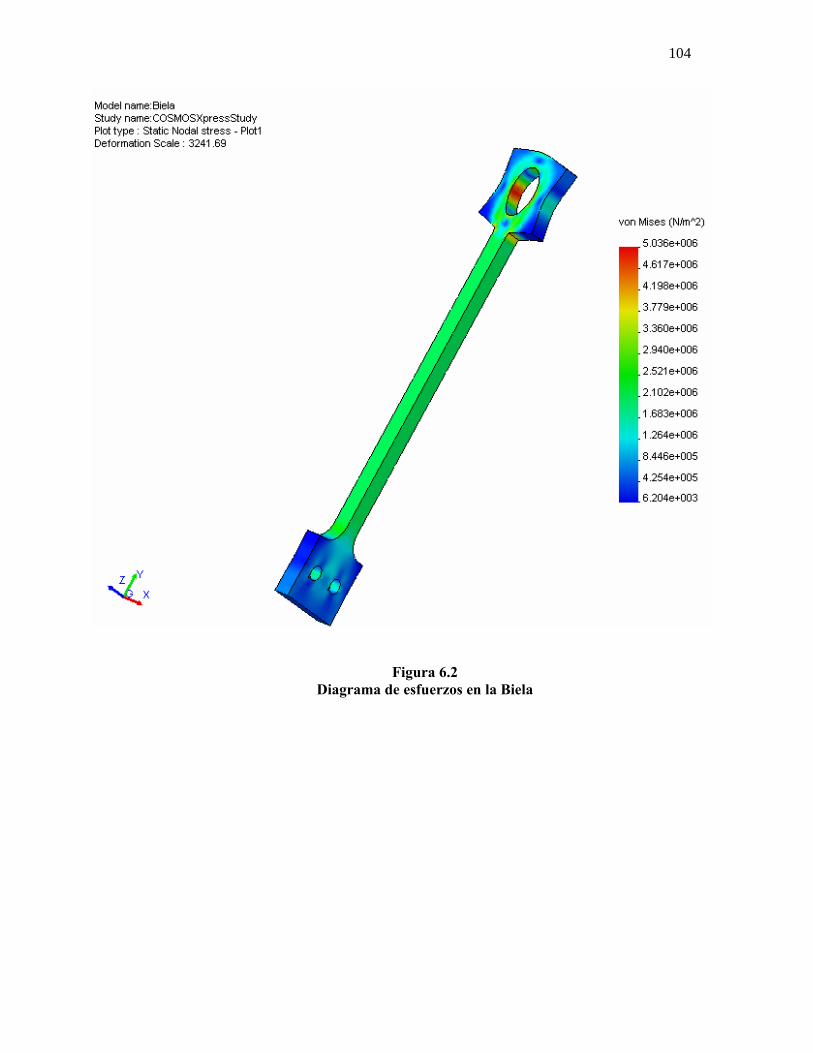
Figura 6.2 Diagrama de esfuerzos en la Biela
105
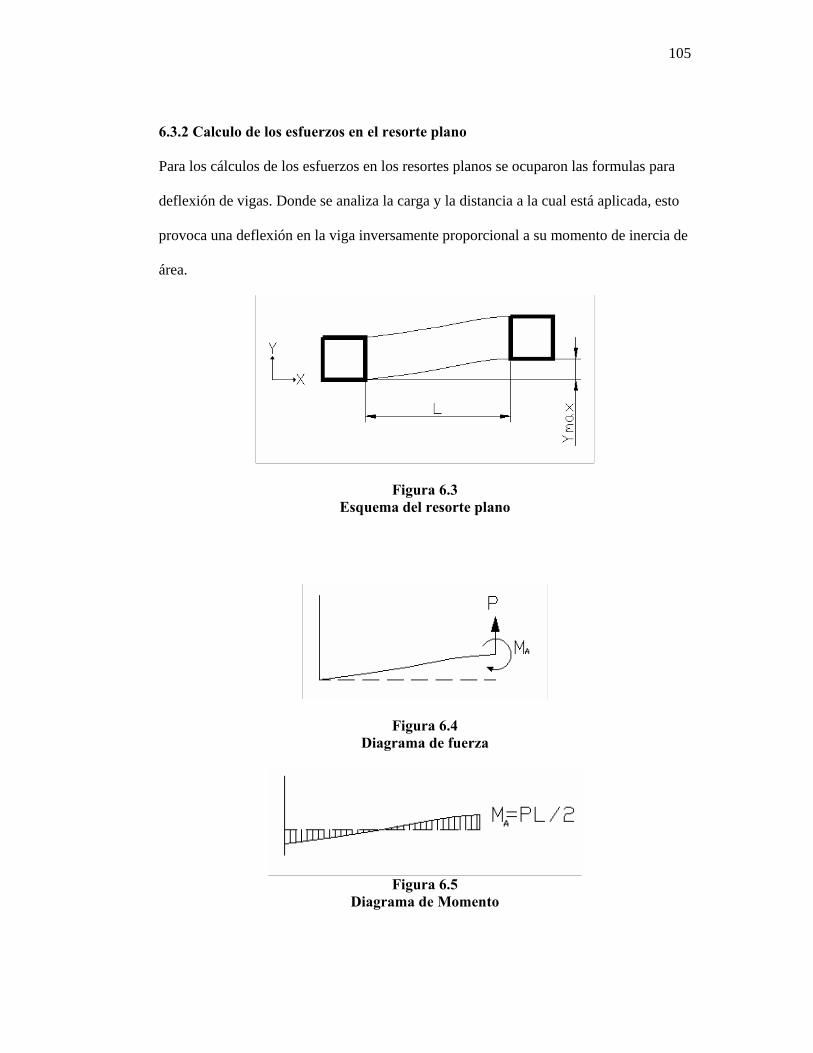
6.3.2 Calculo de los esfuerzos en el resorte plano
Para los cálculos de los esfuerzos en los resortes planos se ocuparon las formulas para
deflexión de vigas. Donde se analiza la carga y la distancia a la cual está aplicada, esto
provoca una deflexión en la viga inversamente proporcional a su momento de inercia de
área.
Figura 6.3 Esquema del resorte plano
Figura 6.4 Diagrama de fuerza
Figura 6.5
Diagrama de Momento

106
En la figura 6.4 se puede observar la sección transversal de la viga para la cual b =
20mm y h =0.2. Estos datos son necesarios para el cálculo de su momento de inercia
de área.
Figura 6.6 Sección transversal de la viga
Para el análisis de la viga es necesario que conozcamos las propiedades del
material con el que estamos trabajando, en este caso se necesita de un material que
tenga el comportamiento de resorte y eso lo podemos encontrar en un acero laminado en
frío. Las propiedades de esta material se encuentran el la Tabla 6.2.
Tabla 6.3
Propiedades del Acero laminado en frío Modulo de Elasticidad 190GPa
Densidad 7920Kg/m3
Esfuerzo Último 860MPa Esfuerzo de
Cedencia 520MPa
Para el análisis de los resortes planos tenemos las siguientes condiciones:
0=x 0=dxdy
lx = 0=dxdy
δ - Desplazamiento de la viga en Cantiliver
P- Fuerza al extremo de la viga
107
M- Momento de flexión
Donde el momento de flexión esta dado por la siguiente relación
2PlM = (6.5)
El máximo desplazamiento está dado por:
EI
Pl12
3
=δ o δ312
lEIP = (6.6)
El momento máximo esta dado por:
δ2max6lEIM = (6.7)
El esfuerzo máximo está dado por:
δσ 2max32/lEh
IMh
== (6.8)
Calculando el esfuerzo máximo en la viga tenemos;
MPam
mGPalEh 45.90016.0
142.)0004.0)(190(33
22max === δσ
El esfuerzo de cedencia de la viga laminada en frío es: 520MPa por lo cual
estamos dentro de los márgenes de seguridad. Si tomamos un factor de seguridad
(F.S.=2) nuestro esfuerzo admisible MPaadm 260=σ y de la misma manera nos
encontramos en el rango estable.
A continuación se presentan los planos de ensamble para la construcción del
péndulo excitado paramétricamente. Estas medidas están soportadas por cálculos
teóricos y factores de seguridad. Los planos de las piezas individuales se encuentran en
el Anexo.
108
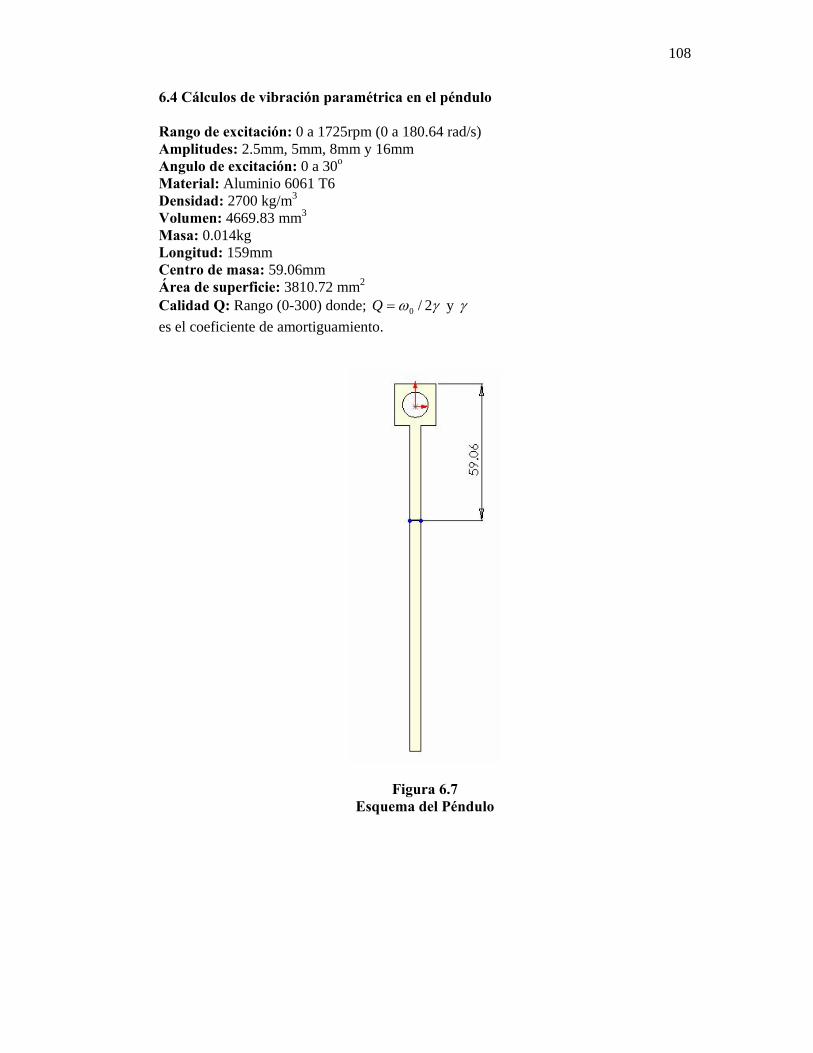
6.4 Cálculos de vibración paramétrica en el péndulo Rango de excitación: 0 a 1725rpm (0 a 180.64 rad/s) Amplitudes: 2.5mm, 5mm, 8mm y 16mm Angulo de excitación: 0 a 30o Material: Aluminio 6061 T6 Densidad: 2700 kg/m3 Volumen: 4669.83 mm3
Masa: 0.014kg Longitud: 159mm Centro de masa: 59.06mm Área de superficie: 3810.72 mm2
Calidad Q: Rango (0-300) donde; γω 2/0=Q y γ es el coeficiente de amortiguamiento.
Figura 6.7 Esquema del Péndulo
109
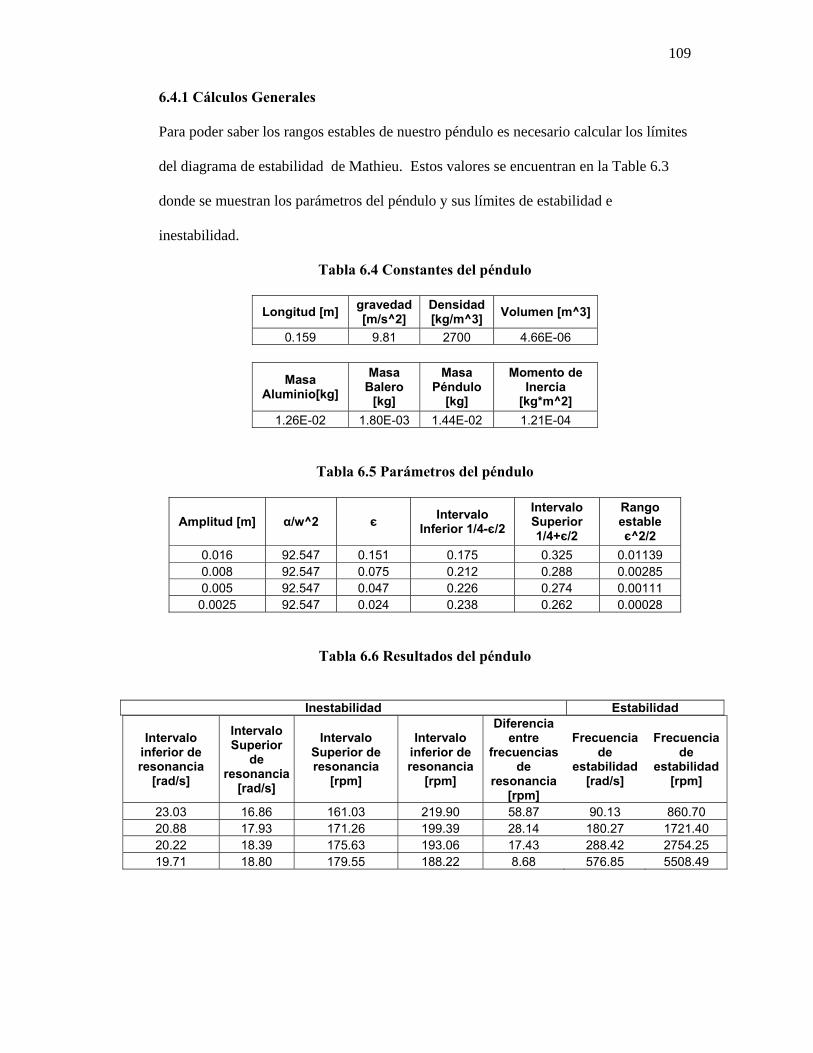
6.4.1 Cálculos Generales
Para poder saber los rangos estables de nuestro péndulo es necesario calcular los límites
del diagrama de estabilidad de Mathieu. Estos valores se encuentran en la Table 6.3
donde se muestran los parámetros del péndulo y sus límites de estabilidad e
inestabilidad.
Tabla 6.4 Constantes del péndulo
Longitud [m] gravedad [m/s^2]
Densidad [kg/m^3] Volumen [m^3]
0.159 9.81 2700 4.66E-06
Masa Aluminio[kg]
Masa Balero
[kg]
Masa Péndulo
[kg]
Momento de Inercia
[kg*m^2] 1.26E-02 1.80E-03 1.44E-02 1.21E-04
Tabla 6.5 Parámetros del péndulo
Amplitud [m] α/w^2 є Intervalo Inferior 1/4-є/2
Intervalo Superior 1/4+є/2
Rango estable є^2/2
0.016 92.547 0.151 0.175 0.325 0.01139 0.008 92.547 0.075 0.212 0.288 0.00285 0.005 92.547 0.047 0.226 0.274 0.00111 0.0025 92.547 0.024 0.238 0.262 0.00028
Tabla 6.6 Resultados del péndulo
Intervalo inferior de resonancia
[rad/s]
Intervalo Superior
de resonancia
[rad/s]
Intervalo Superior de resonancia
[rpm]
Intervalo inferior de resonancia
[rpm]
Diferencia entre
frecuencias de
resonancia [rpm]
Frecuencia de
estabilidad [rad/s]
Frecuencia de
estabilidad [rpm]
23.03 16.86 161.03 219.90 58.87 90.13 860.70 20.88 17.93 171.26 199.39 28.14 180.27 1721.40 20.22 18.39 175.63 193.06 17.43 288.42 2754.25 19.71 18.80 179.55 188.22 8.68 576.85 5508.49
Inestabilidad Estabilidad
110
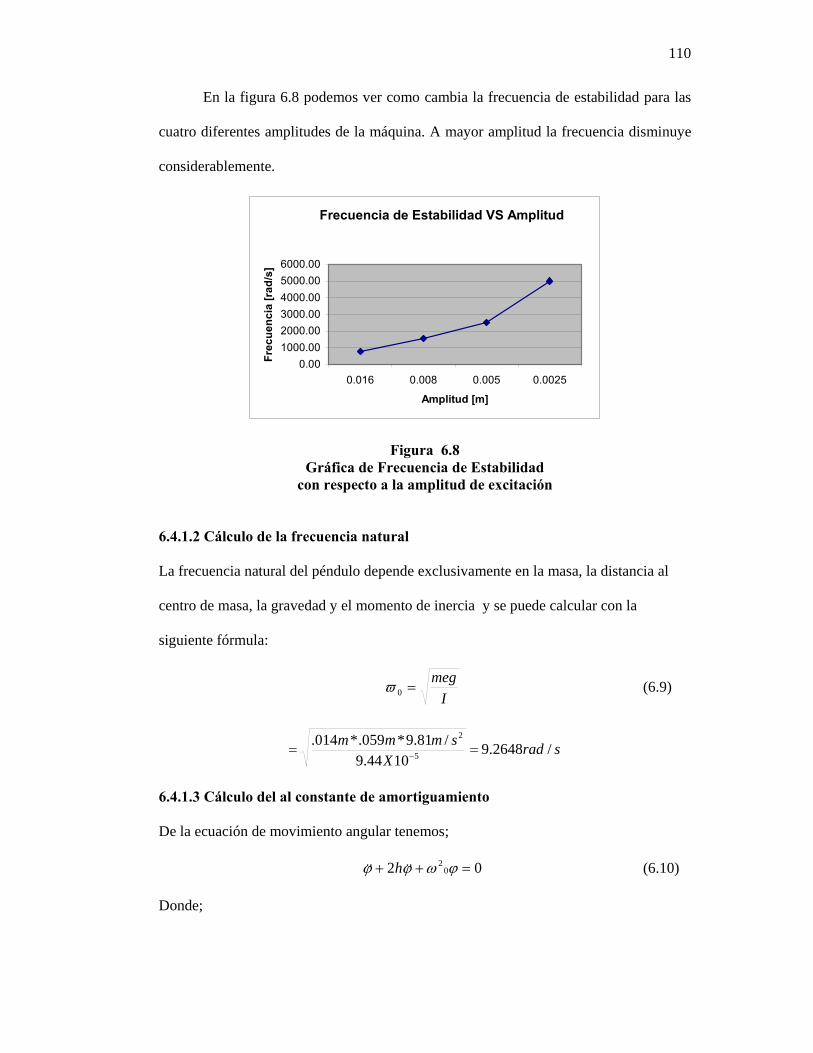
En la figura 6.8 podemos ver como cambia la frecuencia de estabilidad para las
cuatro diferentes amplitudes de la máquina. A mayor amplitud la frecuencia disminuye
considerablemente.
Frecuencia de Estabilidad VS Amplitud
0.001000.002000.003000.004000.005000.006000.00
0.016 0.008 0.005 0.0025
Amplitud [m]
Frec
uenc
ia [r
ad/s
]
Figura 6.8 Gráfica de Frecuencia de Estabilidad
con respecto a la amplitud de excitación
6.4.1.2 Cálculo de la frecuencia natural
La frecuencia natural del péndulo depende exclusivamente en la masa, la distancia al
centro de masa, la gravedad y el momento de inercia y se puede calcular con la
siguiente fórmula:
I
meg=0ϖ (6.9)
sradX
smmm /2648.91044.9
/81.9*059.*014.5
2
== −
6.4.1.3 Cálculo del al constante de amortiguamiento
De la ecuación de movimiento angular tenemos;
02 02 =++ ϕωϕϕ &&&& h (6.10)
Donde;

111
hIc 2= (6.11)
εω
=0
h (6.12)
Para tener una relación aceptable debemos estar en el siguiente rango 05.001.0 ≤≤ ε .
Por lo tanto podemos encontrar h:
sradsradh /0926.0/26.9*01.00 === εω
Y finalmente podemos hallar el valor de c
mNmkgXsradhIc *0000224.0*1021.1*/0926.0*22 24 === −
6.4.2Cálculos específicos sin ángulo de excitación
6.4.2.1 Análisis para la amplitud a = 0.016m
6.4.2.1.1 Comportamiento Estable
6.4.2.1.1.1 Cálculo del óptimo ángulo inicial
El ángulo máximo en el cual se pude observar estabilidad está dado por la siguiente
ecuación:
2
0220max 22cos ⎟
⎠⎞
⎜⎝⎛==−=
al
agl
ϖϖ
ωψθ (6.13)
Para los parámetros dados en esta sección tenemos los siguientes resultados:
radmsradsrad
al 52.2
016.0159.
/88.81/26.922
220
max =⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛=ϖϖ
θ
73.144max =θ

112
Figura 6.9 Optimo Angulo Inicial
6.4.2.1.1.2 Cálculo de aceleración, velocidad y desplazamiento del péndulo
La simulación de movimiento del péndulo se realizó en Powersim resolviendo las
siguientes ecuaciones del péndulo físico adaptadas a nuestro sistema:
0sinsin120
2
2
02 =⎟⎟
⎠
⎞⎜⎜⎝
⎛−++ ϕω
ωωωϕγϕ t
la
&&& (6.14)
I
meg=0ϖ (6.15)
Donde la solución arroja resultados para encontrar aceleraciones, velocidades y
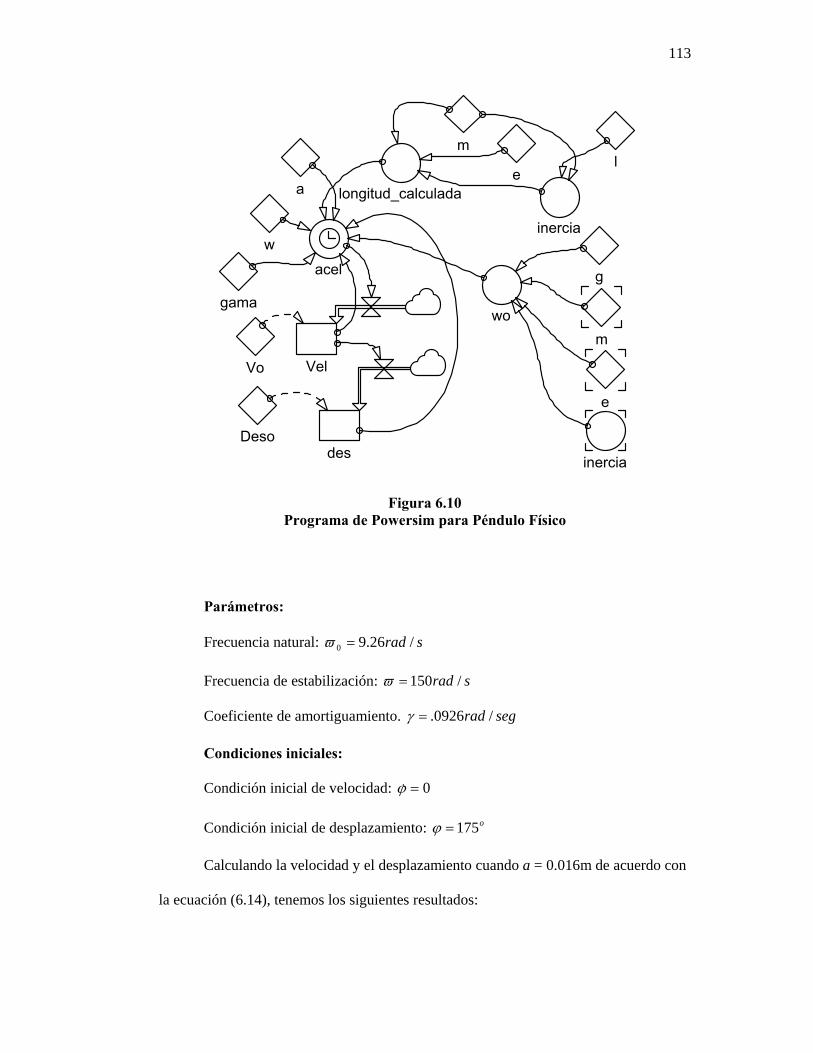
desplazamientos. A continuación se presenta un esquema que representa la solución de
la ecuación, en donde se establecen relaciones entre constantes y variables para hallar
la solución de la ecuación.
113
w
a
Vel
des
acel
Vo
Deso
gama
longitud_calculada
m
e
inercia
wo
g
m
e
inercia
l
Figura 6.10 Programa de Powersim para Péndulo Físico
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /150=ϖ
Coeficiente de amortiguamiento. segrad /0926.=γ
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o175=ϕ
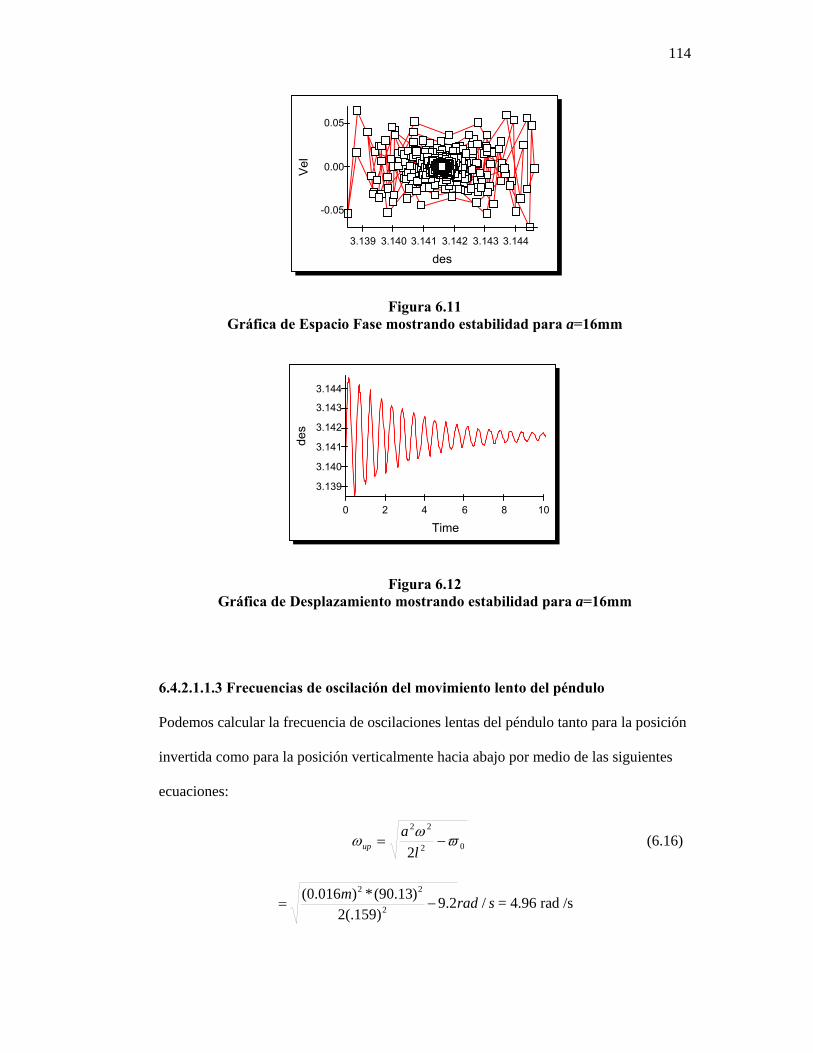
Calculando la velocidad y el desplazamiento cuando a = 0.016m de acuerdo con
la ecuación (6.14), tenemos los siguientes resultados:
114
des
Vel
3.139 3.140 3.141 3.142 3.143 3.144
-0.05
0.00
0.05
Figura 6.11 Gráfica de Espacio Fase mostrando estabilidad para a=16mm
Time
des
0 2 4 6 8 10
3.139
3.140
3.141
3.142
3.143
3.144
Figura 6.12 Gráfica de Desplazamiento mostrando estabilidad para a=16mm
6.4.2.1.1.3 Frecuencias de oscilación del movimiento lento del péndulo
Podemos calcular la frecuencia de oscilaciones lentas del péndulo tanto para la posición
invertida como para la posición verticalmente hacia abajo por medio de las siguientes
ecuaciones:
02
22
2ϖωω −=
la
up (6.16)
sradm /2.9)159(.2
)13.90(*)016.0(2
22
−= = 4.96 rad /s
115
02
22
2ϖωω +=
la
down (6.17)
sradm
sradm /2.9)159.0(2
)/13.90(*)016.0(2
22
+= = 6.57 rad/s
6.4.2.1.2 Comportamiento Inestable
Frecuencia natural: srad /26.90 =ϖ
Frecuencias de resonancia:
sradsrad /03.23/86.16 <<ϖ
rpmrpm 219161 <<ϖ
La simulación de movimiento inestable del péndulo se analizará resolviendo las
mismas ecuaciones (6.14) y (6.15):
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /17=ϖ
Coeficiente de amortiguamiento. segrad /0926.=γ
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: 020=ϕ
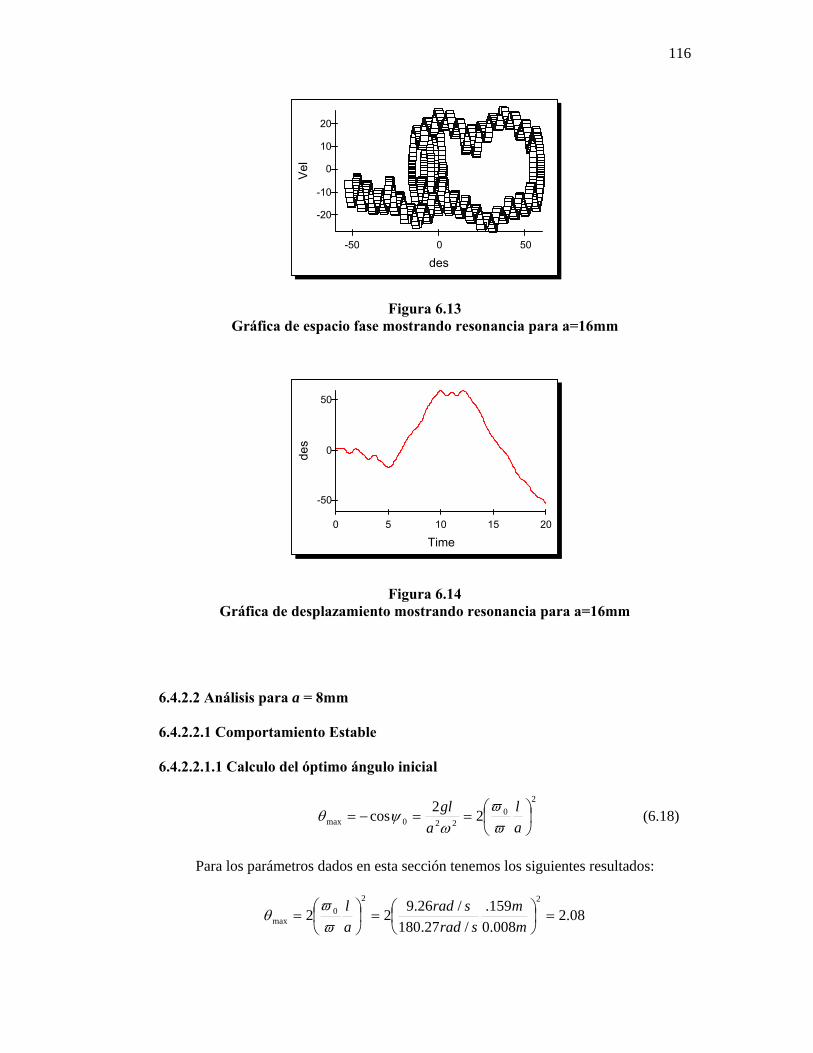
116
des
Vel
-50 0 50
-20
-10
0
10
20
Figura 6.13 Gráfica de espacio fase mostrando resonancia para a=16mm
Time
des
0 5 10 15 20
-50
0
50
Figura 6.14 Gráfica de desplazamiento mostrando resonancia para a=16mm
6.4.2.2 Análisis para a = 8mm
6.4.2.2.1 Comportamiento Estable
6.4.2.2.1.1 Calculo del óptimo ángulo inicial
2
0220max 22cos ⎟
⎠⎞
⎜⎝⎛==−=
al
agl
ϖϖ
ωψθ (6.18)
Para los parámetros dados en esta sección tenemos los siguientes resultados:
08.2008.0
159./27.180
/26.92222
0max =⎟
⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛=
mm
sradsrad
al
ϖϖ
θ
117
73.144max =θ
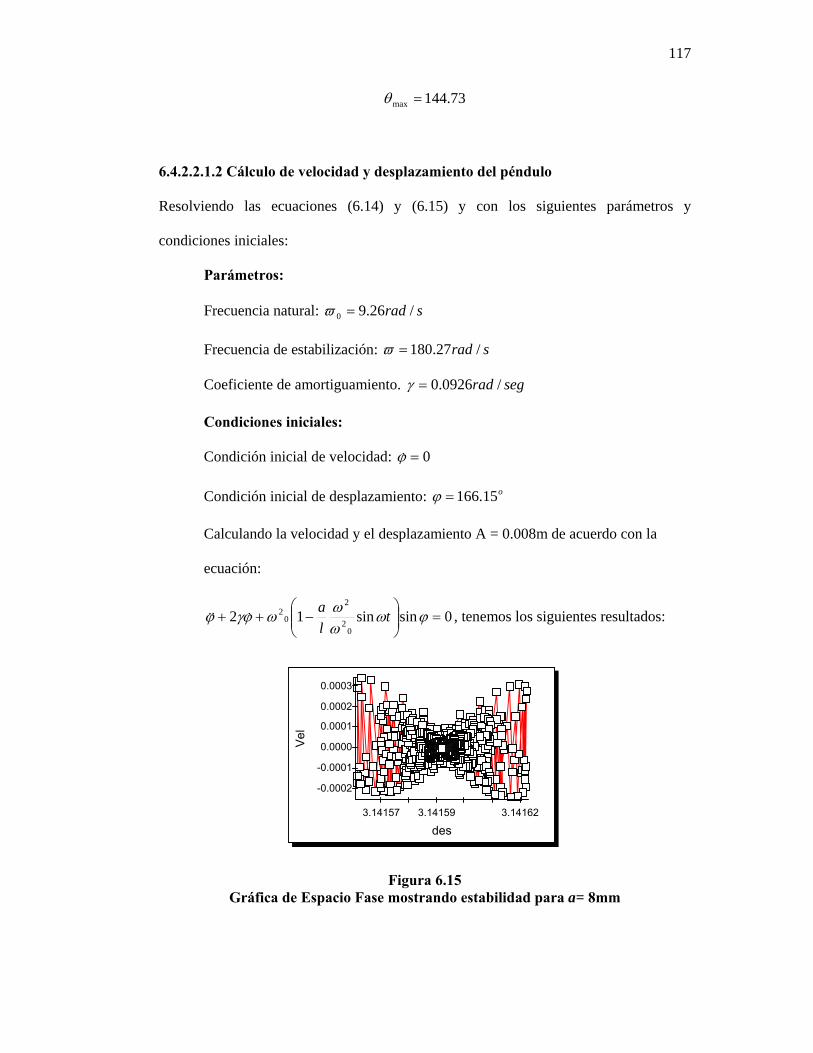
6.4.2.2.1.2 Cálculo de velocidad y desplazamiento del péndulo
Resolviendo las ecuaciones (6.14) y (6.15) y con los siguientes parámetros y
condiciones iniciales:
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /27.180=ϖ
Coeficiente de amortiguamiento. segrad /0926.0=γ
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o15.166=ϕ
Calculando la velocidad y el desplazamiento A = 0.008m de acuerdo con la
ecuación:
0sinsin120
2
2
02 =⎟⎟
⎠
⎞⎜⎜⎝
⎛−++ ϕω
ωωωϕγϕ t
la
&&& , tenemos los siguientes resultados:
des
Vel
3.14157 3.14159 3.14162
-0.0002
-0.0001
0.0000
0.0001
0.0002
0.0003
Figura 6.15 Gráfica de Espacio Fase mostrando estabilidad para a= 8mm
118
Timede
s
0 5 10 15 20 25 30
3.14157
3.14158
3.14159
3.14160
3.14161
3.14162
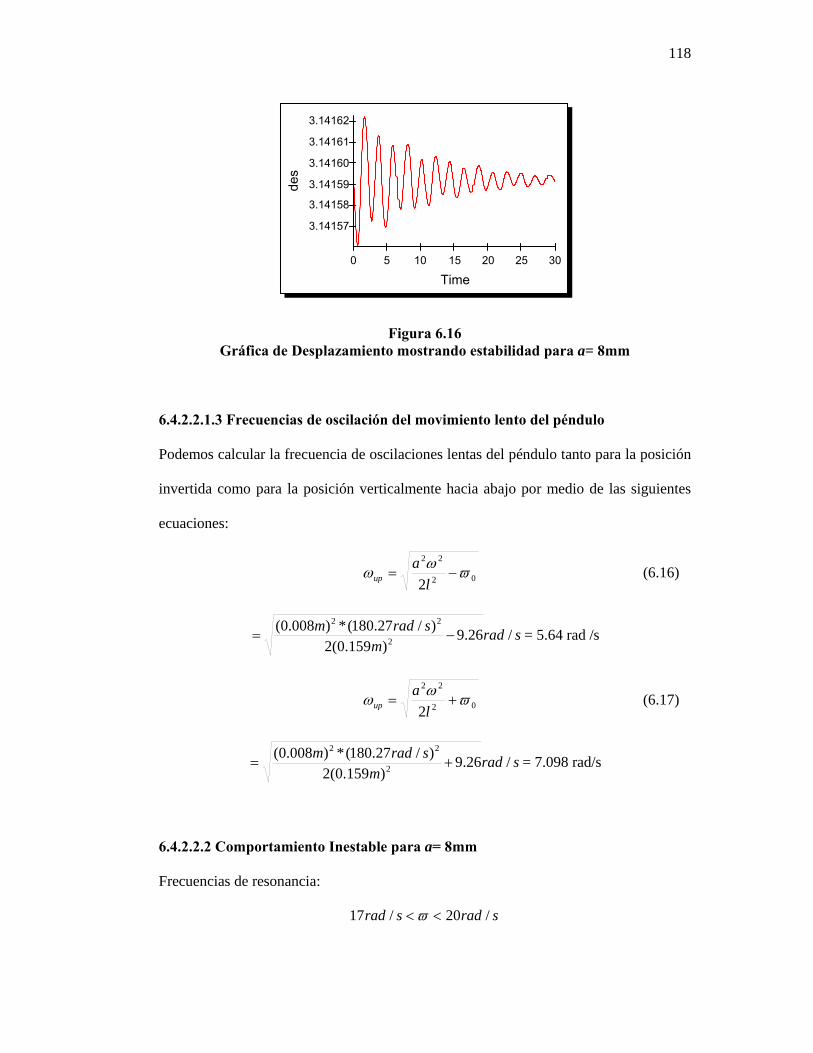
Figura 6.16 Gráfica de Desplazamiento mostrando estabilidad para a= 8mm
6.4.2.2.1.3 Frecuencias de oscilación del movimiento lento del péndulo
Podemos calcular la frecuencia de oscilaciones lentas del péndulo tanto para la posición
invertida como para la posición verticalmente hacia abajo por medio de las siguientes
ecuaciones:
02
22
2ϖωω −=
la
up (6.16)
sradm
sradm /26.9)159.0(2
)/27.180(*)008.0(2
22
−= = 5.64 rad /s
02
22
2ϖωω +=
la
up (6.17)
sradm
sradm /26.9)159.0(2
)/27.180(*)008.0(2
22
+= = 7.098 rad/s
6.4.2.2.2 Comportamiento Inestable para a= 8mm
Frecuencias de resonancia:
sradsrad /20/17 <<ϖ
119
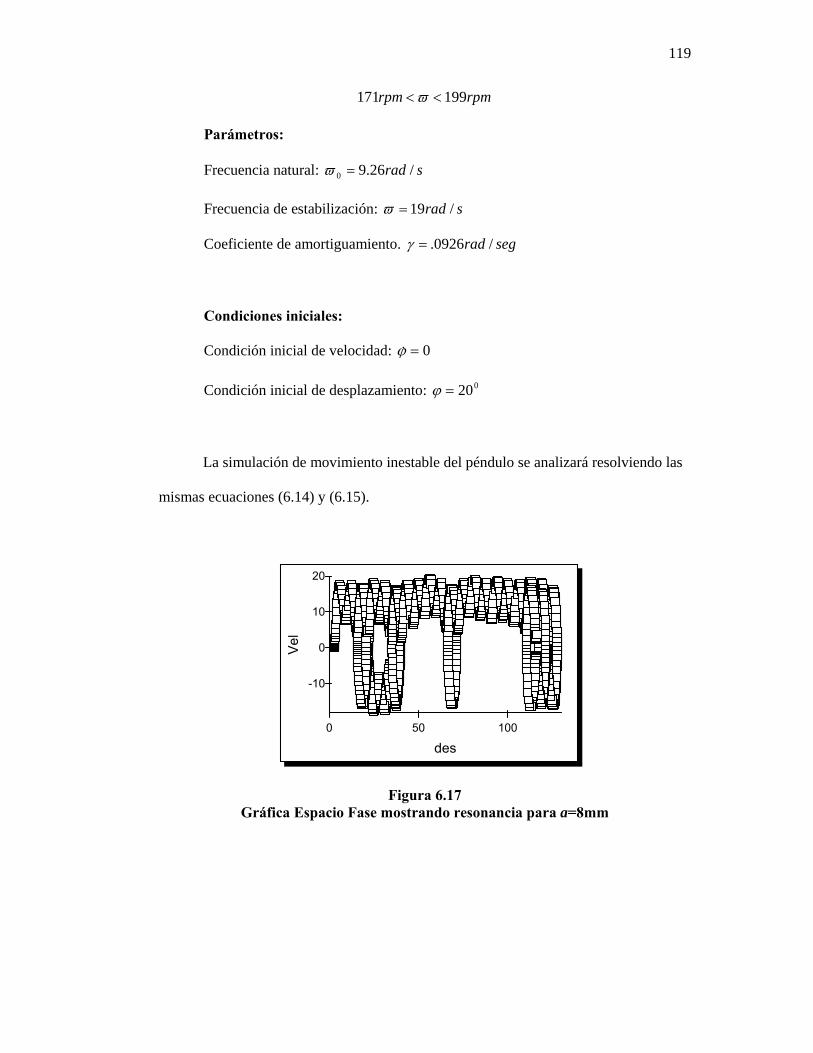
rpmrpm 199171 <<ϖ
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /19=ϖ
Coeficiente de amortiguamiento. segrad /0926.=γ
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: 020=ϕ
La simulación de movimiento inestable del péndulo se analizará resolviendo las
mismas ecuaciones (6.14) y (6.15).
des
Vel
0 50 100
-10
0
10
20
Figura 6.17 Gráfica Espacio Fase mostrando resonancia para a=8mm
120
Timede
s
0 5 10 15 20 25 300
50
100
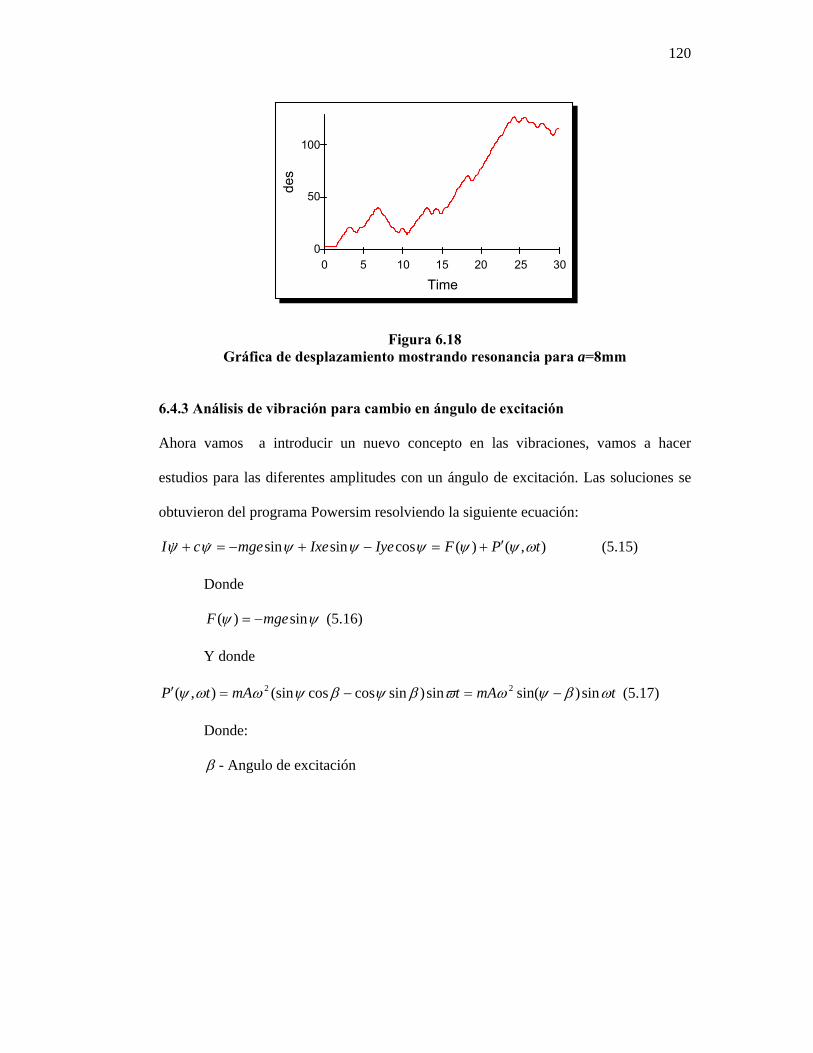
Figura 6.18 Gráfica de desplazamiento mostrando resonancia para a=8mm
6.4.3 Análisis de vibración para cambio en ángulo de excitación
Ahora vamos a introducir un nuevo concepto en las vibraciones, vamos a hacer
estudios para las diferentes amplitudes con un ángulo de excitación. Las soluciones se
obtuvieron del programa Powersim resolviendo la siguiente ecuación:
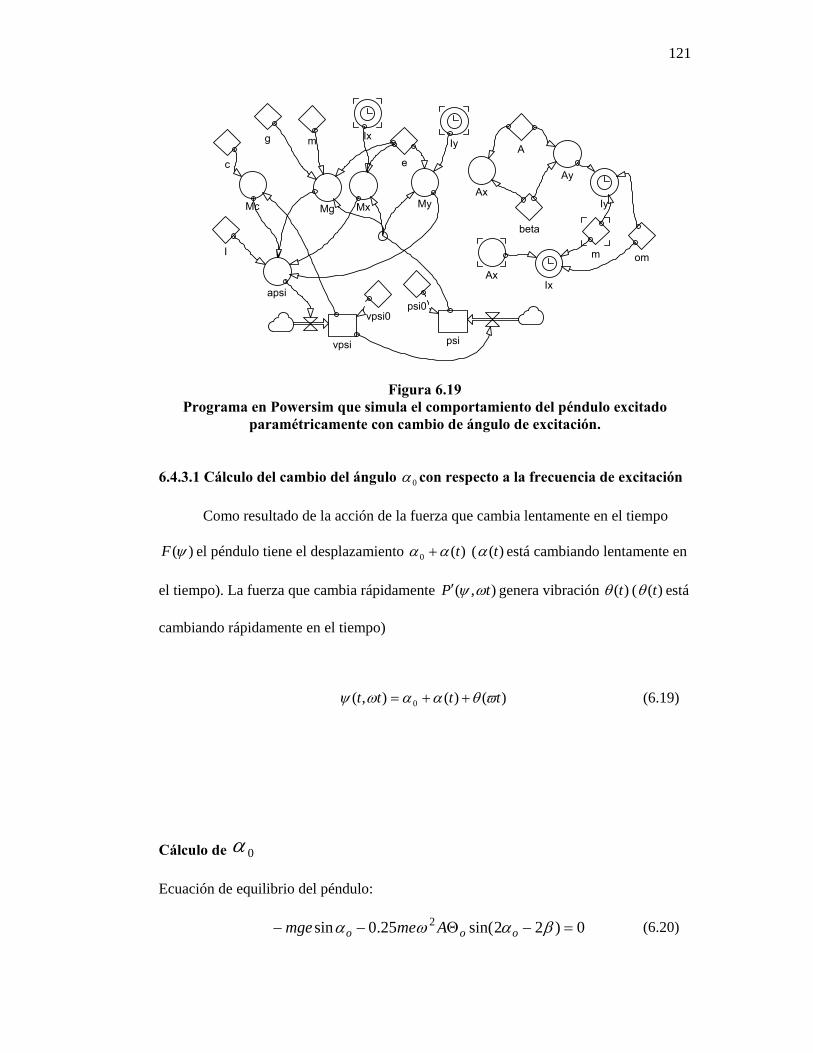
),()(cossinsin tPFIyeIxemgecI ωψψψψψψψ ′+=−+−=+ &&& (5.15)
Donde
ψψ sin)( mgeF −= (5.16)
Y donde
tmAtmAtP ωβψωϖβψβψωωψ sin)sin(sin)sincoscos(sin),( 22 −=−=′ (5.17)
Donde:
β - Angulo de excitación
121
vpsi0
vpsi psi
e
IxIy
MgMc My
apsipsi0
Mx
mg
I
c
AxIx
beta
Ax
A
Ay
Iy
m om
Figura 6.19 Programa en Powersim que simula el comportamiento del péndulo excitado
paramétricamente con cambio de ángulo de excitación.
6.4.3.1 Cálculo del cambio del ángulo 0α con respecto a la frecuencia de excitación
Como resultado de la acción de la fuerza que cambia lentamente en el tiempo
)(ψF el péndulo tiene el desplazamiento )(0 tαα + ( )(tα está cambiando lentamente en
el tiempo). La fuerza que cambia rápidamente ),( tP ωψ′ genera vibración )(tθ ( )(tθ está
cambiando rápidamente en el tiempo)
)()(),( 0 tttt ϖθααωψ ++= (6.19)
Cálculo de 0α
Ecuación de equilibrio del péndulo:
0)22sin(25.0sin 2 =−Θ−− βαωα ooo Amemge (6.20)
122
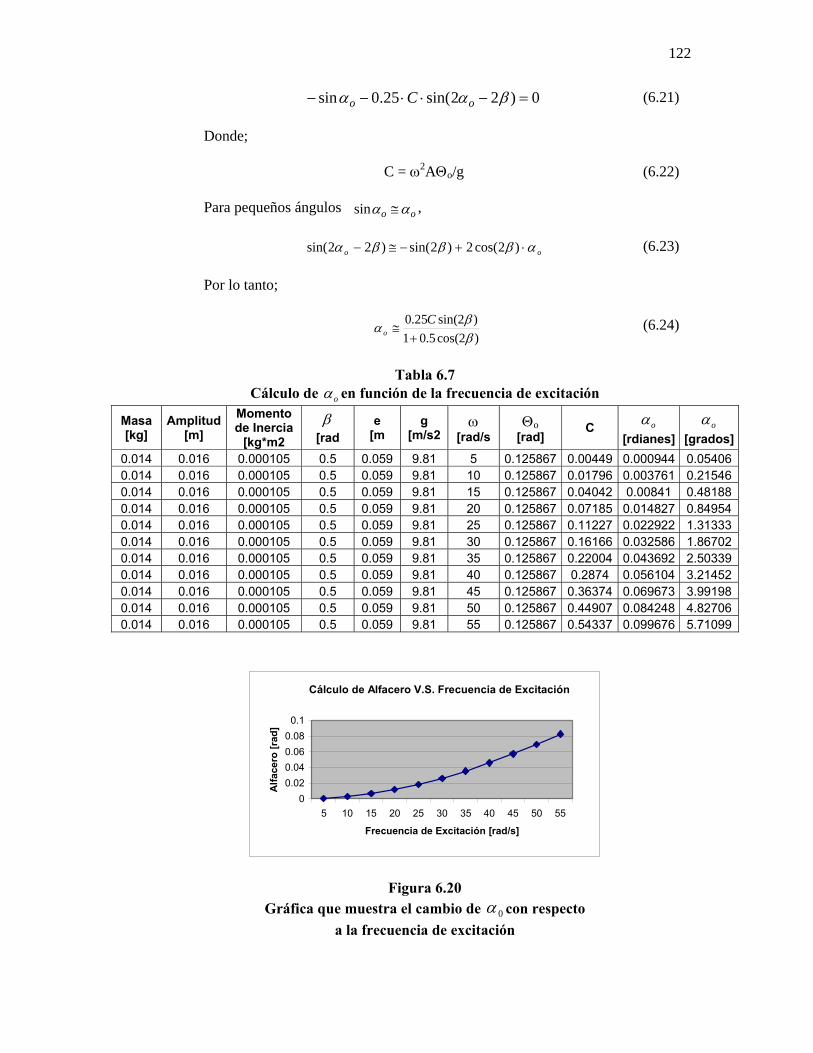
0)22sin(25.0sin =−⋅⋅−− βαα oo C (6.21)
Donde;
C = ω2AΘo/g (6.22)
Para pequeños ángulos oo αα ≅sin ,
oo αβββα ⋅+−≅− )2cos(2)2sin()22sin( (6.23)
Por lo tanto;
)2cos(5.01)2sin(25.0
ββ
α+
≅C
o (6.24)
Tabla 6.7 Cálculo de oα en función de la frecuencia de excitación
Masa [kg]
Amplitud [m]
Momento de Inercia
[kg*m2
β [rad
e [m
g [m/s2
ω [rad/s
Θo [rad]
C oα [rdianes]
oα [grados]
0.014 0.016 0.000105 0.5 0.059 9.81 5 0.125867 0.00449 0.000944 0.054060.014 0.016 0.000105 0.5 0.059 9.81 10 0.125867 0.01796 0.003761 0.215460.014 0.016 0.000105 0.5 0.059 9.81 15 0.125867 0.04042 0.00841 0.481880.014 0.016 0.000105 0.5 0.059 9.81 20 0.125867 0.07185 0.014827 0.849540.014 0.016 0.000105 0.5 0.059 9.81 25 0.125867 0.11227 0.022922 1.313330.014 0.016 0.000105 0.5 0.059 9.81 30 0.125867 0.16166 0.032586 1.867020.014 0.016 0.000105 0.5 0.059 9.81 35 0.125867 0.22004 0.043692 2.503390.014 0.016 0.000105 0.5 0.059 9.81 40 0.125867 0.2874 0.056104 3.214520.014 0.016 0.000105 0.5 0.059 9.81 45 0.125867 0.36374 0.069673 3.991980.014 0.016 0.000105 0.5 0.059 9.81 50 0.125867 0.44907 0.084248 4.827060.014 0.016 0.000105 0.5 0.059 9.81 55 0.125867 0.54337 0.099676 5.71099
Cálculo de Alfacero V.S. Frecuencia de Excitación
00.020.040.060.08
0.1
5 10 15 20 25 30 35 40 45 50 55
Frecuencia de Excitación [rad/s]
Alfa
cero
[rad
]
Figura 6.20 Gráfica que muestra el cambio de 0α con respecto
a la frecuencia de excitación
123
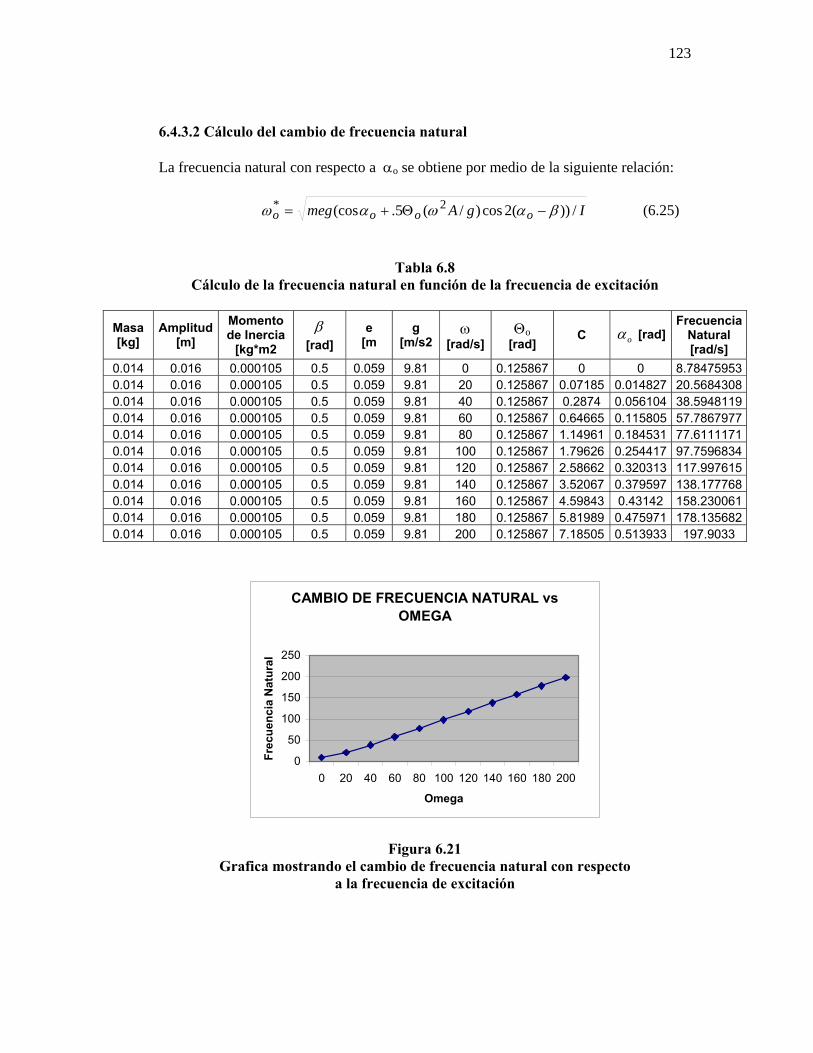
6.4.3.2 Cálculo del cambio de frecuencia natural
La frecuencia natural con respecto a αo se obtiene por medio de la siguiente relación:
IgAmeg oooo /))(2cos)/(5.(cos 2* βαωαω −Θ+= (6.25)
Tabla 6.8 Cálculo de la frecuencia natural en función de la frecuencia de excitación
Masa [kg]
Amplitud [m]
Momento de Inercia
[kg*m2
β [rad]
e [m
g [m/s2
ω [rad/s]
Θo [rad]
C oα [rad]Frecuencia
Natural [rad/s]
0.014 0.016 0.000105 0.5 0.059 9.81 0 0.125867 0 0 8.784759530.014 0.016 0.000105 0.5 0.059 9.81 20 0.125867 0.07185 0.014827 20.56843080.014 0.016 0.000105 0.5 0.059 9.81 40 0.125867 0.2874 0.056104 38.59481190.014 0.016 0.000105 0.5 0.059 9.81 60 0.125867 0.64665 0.115805 57.78679770.014 0.016 0.000105 0.5 0.059 9.81 80 0.125867 1.14961 0.184531 77.61111710.014 0.016 0.000105 0.5 0.059 9.81 100 0.125867 1.79626 0.254417 97.75968340.014 0.016 0.000105 0.5 0.059 9.81 120 0.125867 2.58662 0.320313 117.9976150.014 0.016 0.000105 0.5 0.059 9.81 140 0.125867 3.52067 0.379597 138.1777680.014 0.016 0.000105 0.5 0.059 9.81 160 0.125867 4.59843 0.43142 158.2300610.014 0.016 0.000105 0.5 0.059 9.81 180 0.125867 5.81989 0.475971 178.1356820.014 0.016 0.000105 0.5 0.059 9.81 200 0.125867 7.18505 0.513933 197.9033
CAMBIO DE FRECUENCIA NATURAL vs OMEGA
0
50
100
150
200
250
0 20 40 60 80 100 120 140 160 180 200
Omega
Frec
uenc
ia N
atur
al
Figura 6.21 Grafica mostrando el cambio de frecuencia natural con respecto
a la frecuencia de excitación
124
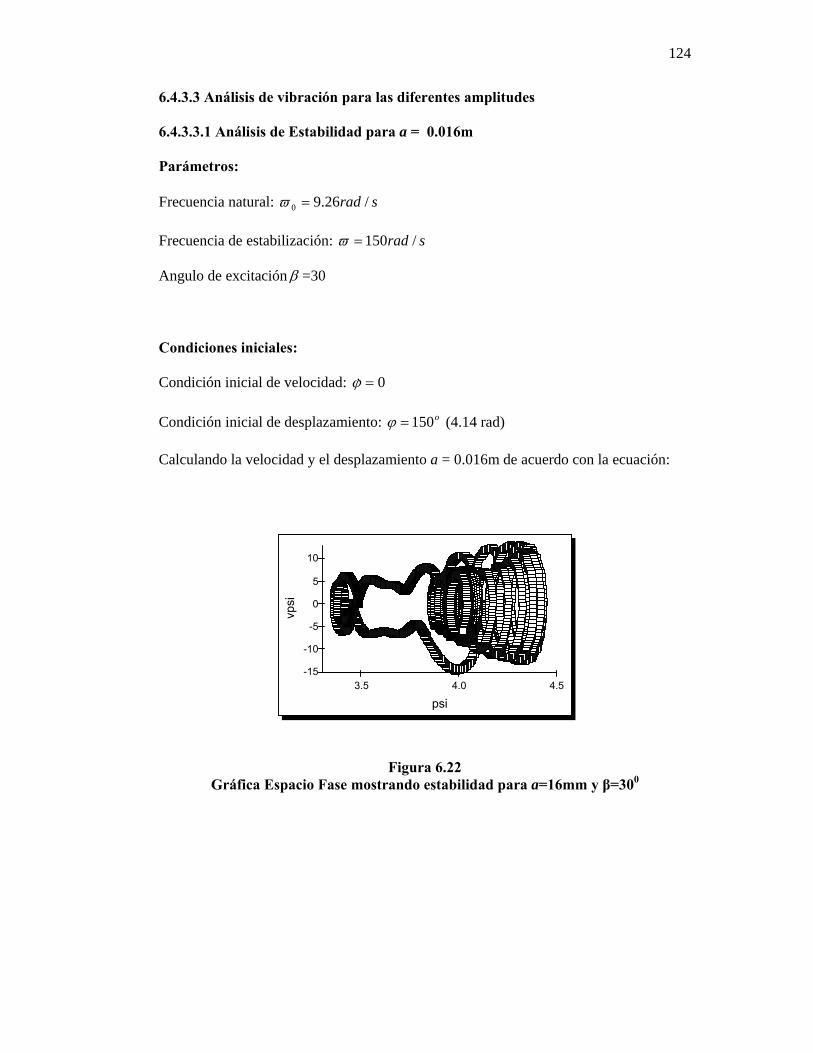
6.4.3.3 Análisis de vibración para las diferentes amplitudes 6.4.3.3.1 Análisis de Estabilidad para a = 0.016m Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /150=ϖ
Angulo de excitaciónβ =30
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o150=ϕ (4.14 rad)
Calculando la velocidad y el desplazamiento a = 0.016m de acuerdo con la ecuación:
psi
vpsi
3.5 4.0 4.5-15
-10
-5
0
5
10
Figura 6.22 Gráfica Espacio Fase mostrando estabilidad para a=16mm y β=300
125
Timeps
i0 2 4 6 8 10
3.5
4.0
4.5
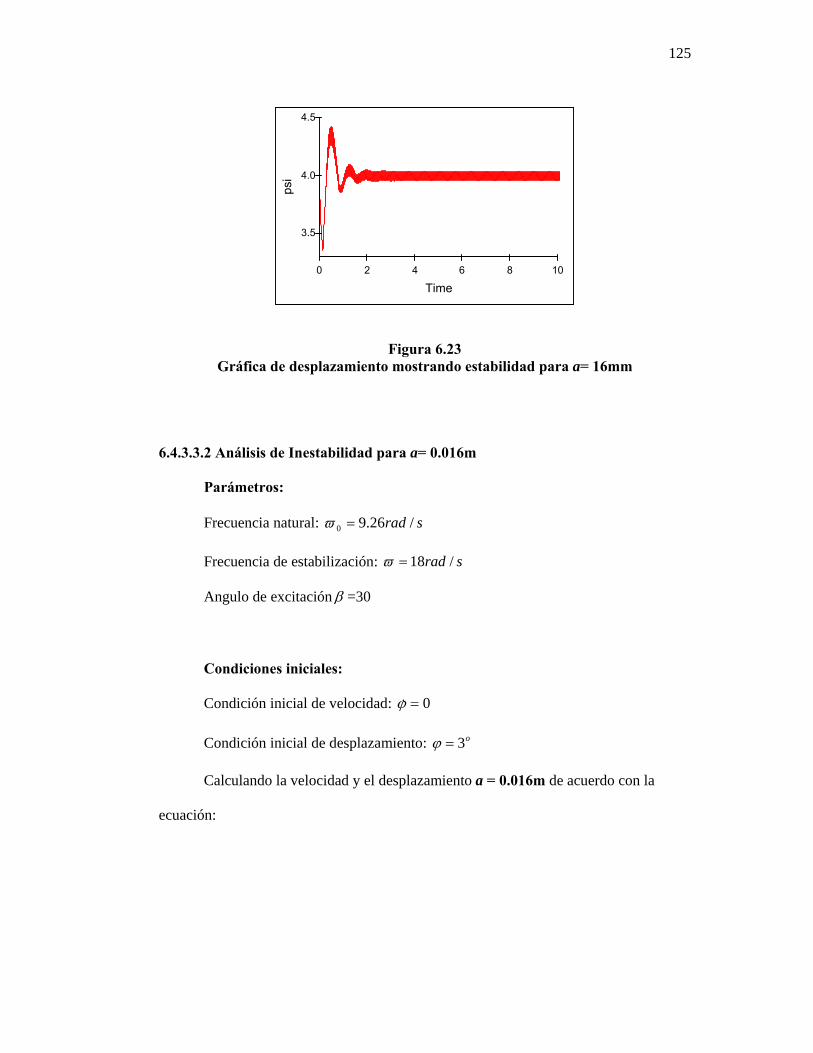
Figura 6.23 Gráfica de desplazamiento mostrando estabilidad para a= 16mm
6.4.3.3.2 Análisis de Inestabilidad para a= 0.016m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /18=ϖ
Angulo de excitación β =30
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o3=ϕ
Calculando la velocidad y el desplazamiento a = 0.016m de acuerdo con la
ecuación:
126
psivp
si
-1 0 1
-10
-5
0
5
10
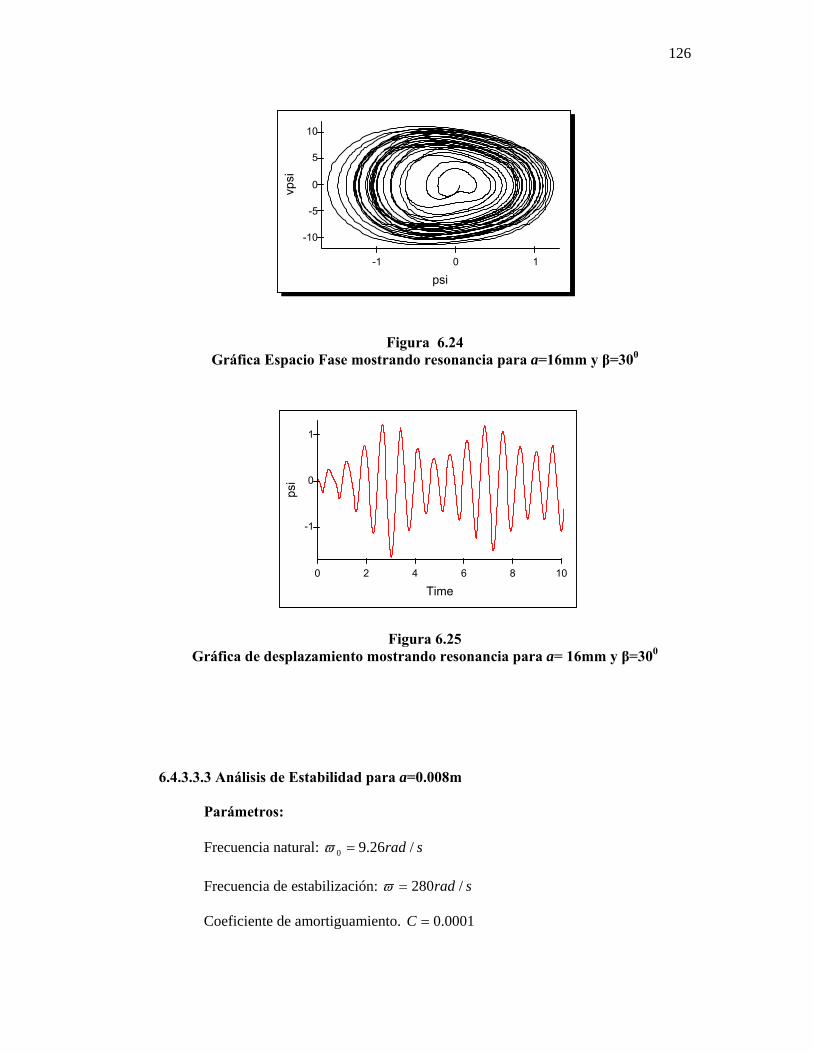
Figura 6.24 Gráfica Espacio Fase mostrando resonancia para a=16mm y β=300
Time
psi
0 2 4 6 8 10
-1
0
1
Figura 6.25 Gráfica de desplazamiento mostrando resonancia para a= 16mm y β=300
6.4.3.3.3 Análisis de Estabilidad para a=0.008m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /280=ϖ
Coeficiente de amortiguamiento. 0001.0=C
127
Angulo de excitación β =30
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: rad14.4=ϕ
Calculando la velocidad y el desplazamiento a = 0.008m de acuerdo con la
ecuación:
psi
vpsi
3.7 3.8 3.9 4.0 4.1 4.2-15
-10
-5
0
5
10
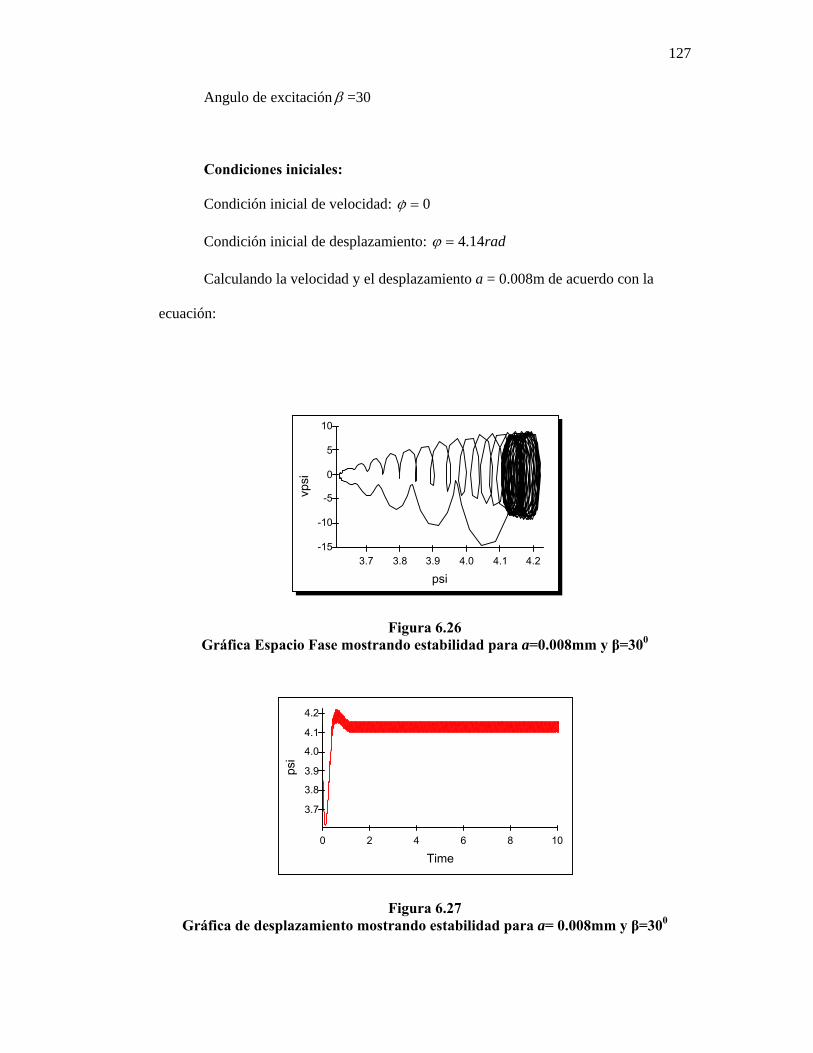
Figura 6.26 Gráfica Espacio Fase mostrando estabilidad para a=0.008mm y β=300
Time
psi
0 2 4 6 8 10
3.7
3.8
3.9
4.0
4.1
4.2
Figura 6.27 Gráfica de desplazamiento mostrando estabilidad para a= 0.008mm y β=300

128
6.4.3.3.4 Análisis de Inestabilidad para a=0.008m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /18=ϖ
Coeficiente de amortiguamiento. 00002.0=C
Angulo de excitación β =30
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o3=ϕ
Calculando la velocidad y el desplazamiento a= 0.008m de acuerdo con la
ecuación:
psi
vpsi
-0.5 0.0 0.5
-5
0
5
Figura 6.28 Gráfica Espacio Fase mostrando resonancia para a=8mm y β=300
129
Time
psi
0 2 4 6 8 10
-0.5
0.0
0.5
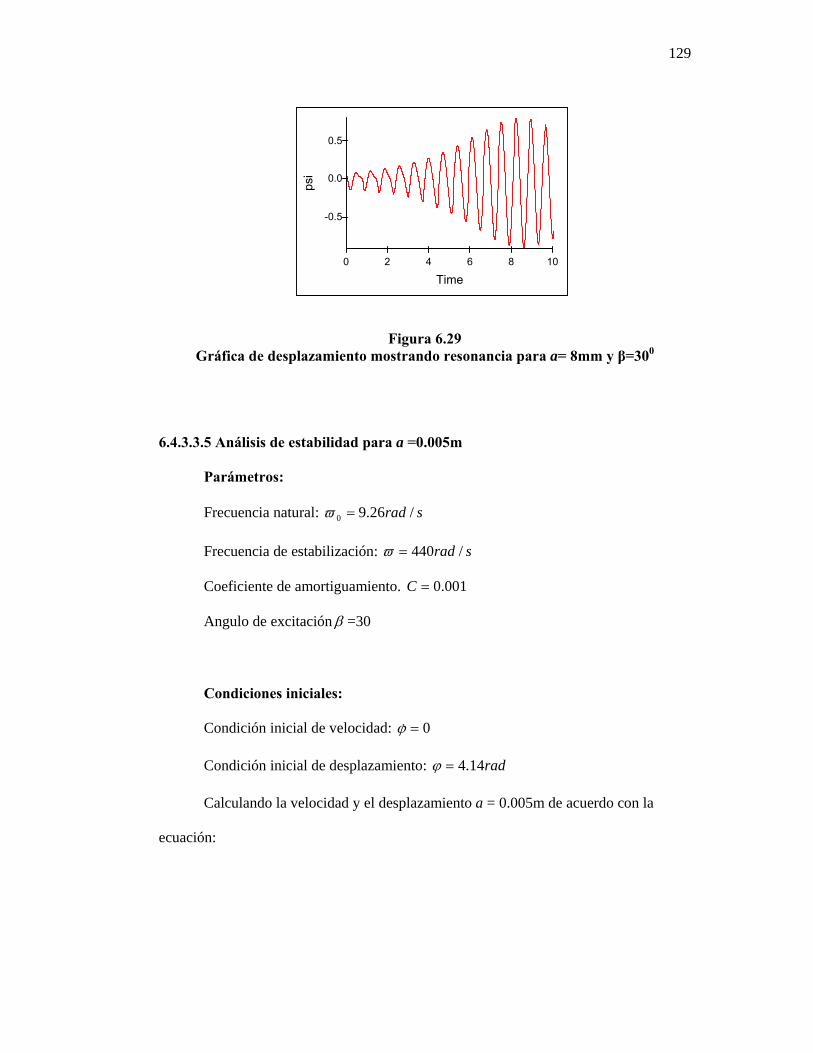
Figura 6.29 Gráfica de desplazamiento mostrando resonancia para a= 8mm y β=300
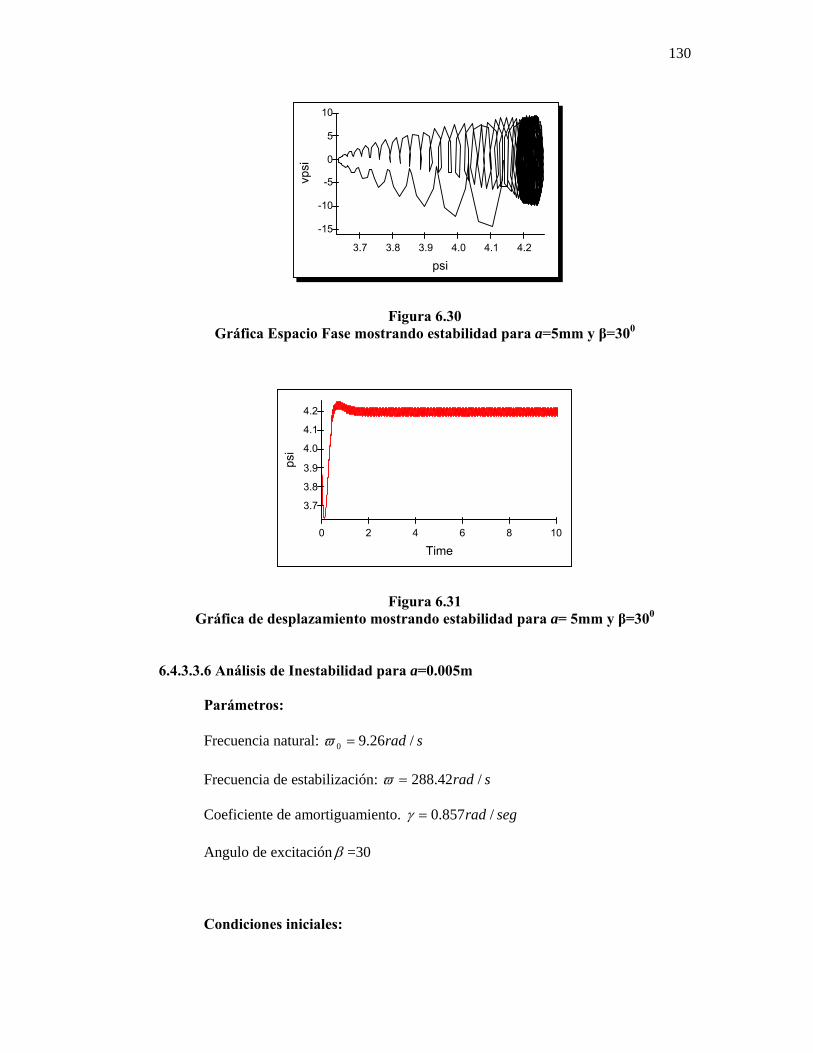
6.4.3.3.5 Análisis de estabilidad para a =0.005m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /440=ϖ
Coeficiente de amortiguamiento. 001.0=C
Angulo de excitación β =30
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: rad14.4=ϕ
Calculando la velocidad y el desplazamiento a = 0.005m de acuerdo con la
ecuación:
130
psi
vpsi
3.7 3.8 3.9 4.0 4.1 4.2
-15
-10
-5
0
5
10
Figura 6.30 Gráfica Espacio Fase mostrando estabilidad para a=5mm y β=300
Time
psi
0 2 4 6 8 10
3.7
3.8
3.9
4.0
4.1
4.2
Figura 6.31 Gráfica de desplazamiento mostrando estabilidad para a= 5mm y β=300
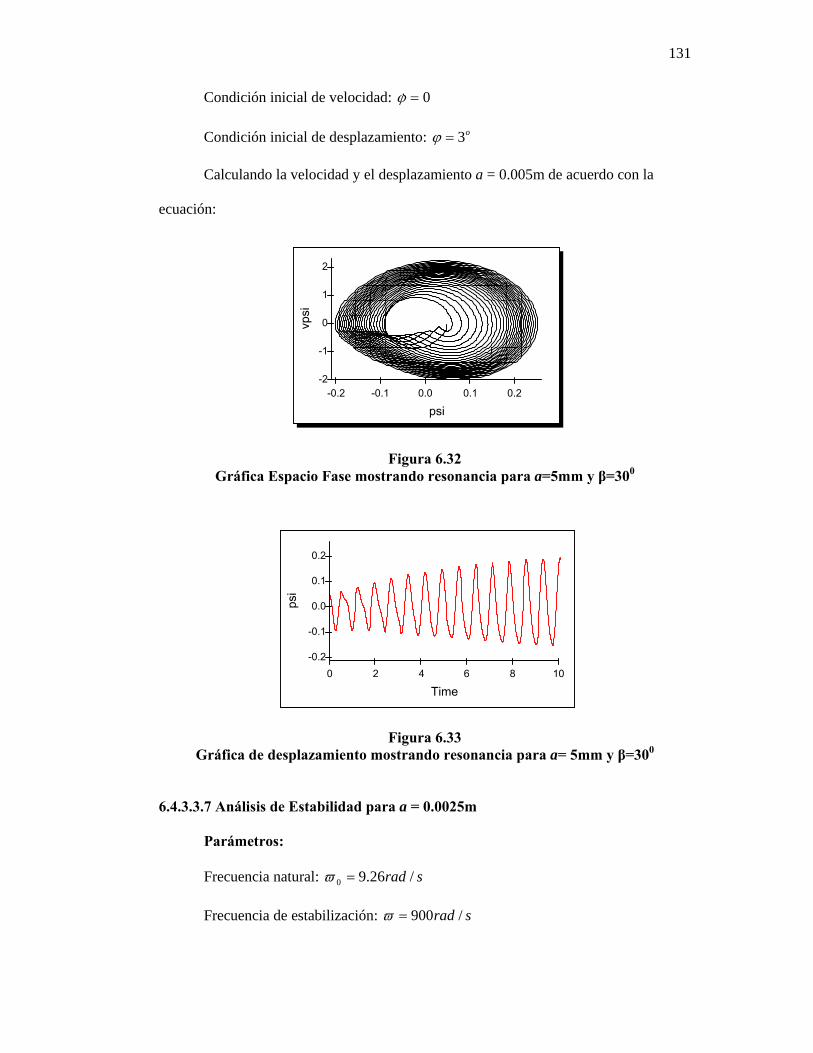
6.4.3.3.6 Análisis de Inestabilidad para a=0.005m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /42.288=ϖ
Coeficiente de amortiguamiento. segrad /857.0=γ
Angulo de excitación β =30
Condiciones iniciales:
131
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o3=ϕ
Calculando la velocidad y el desplazamiento a = 0.005m de acuerdo con la
ecuación:
psi
vpsi
-0.2 -0.1 0.0 0.1 0.2-2
-1
0
1
2
Figura 6.32 Gráfica Espacio Fase mostrando resonancia para a=5mm y β=300
Time
psi
0 2 4 6 8 10-0.2
-0.1
0.0
0.1
0.2
Figura 6.33 Gráfica de desplazamiento mostrando resonancia para a= 5mm y β=300
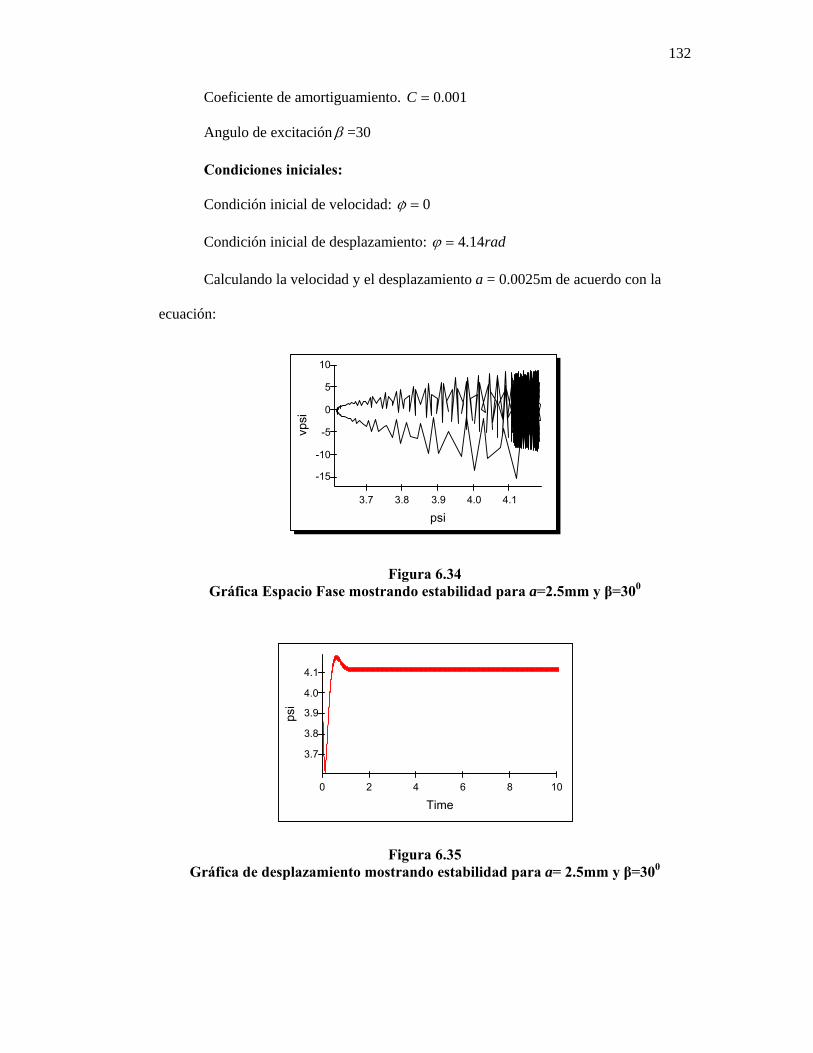
6.4.3.3.7 Análisis de Estabilidad para a = 0.0025m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /900=ϖ
132
Coeficiente de amortiguamiento. 001.0=C
Angulo de excitaciónβ =30
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: rad14.4=ϕ
Calculando la velocidad y el desplazamiento a = 0.0025m de acuerdo con la
ecuación:
psi
vpsi
3.7 3.8 3.9 4.0 4.1
-15
-10
-5
0
5
10
Figura 6.34 Gráfica Espacio Fase mostrando estabilidad para a=2.5mm y β=300
Time
psi
0 2 4 6 8 10
3.7
3.8
3.9
4.0
4.1
Figura 6.35 Gráfica de desplazamiento mostrando estabilidad para a= 2.5mm y β=300
133
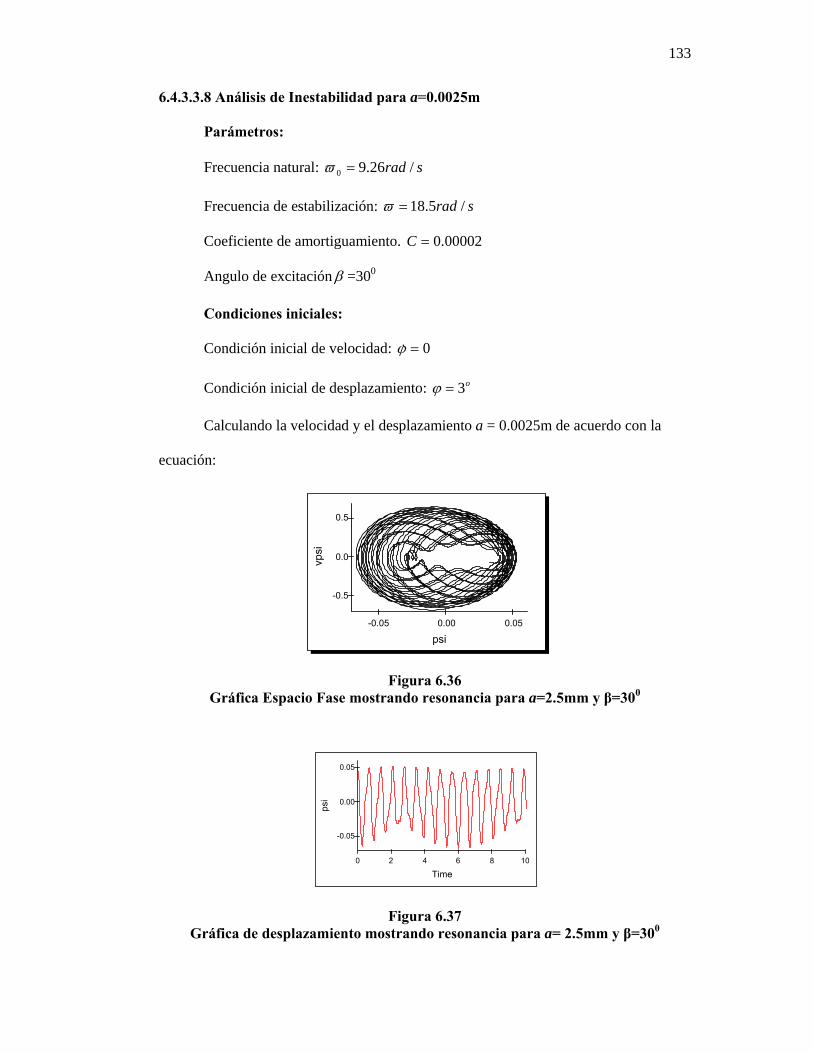
6.4.3.3.8 Análisis de Inestabilidad para a=0.0025m
Parámetros:
Frecuencia natural: srad /26.90 =ϖ
Frecuencia de estabilización: srad /5.18=ϖ
Coeficiente de amortiguamiento. 00002.0=C
Angulo de excitación β =300
Condiciones iniciales:
Condición inicial de velocidad: 0=ϕ&
Condición inicial de desplazamiento: o3=ϕ
Calculando la velocidad y el desplazamiento a = 0.0025m de acuerdo con la
ecuación:
psi
vpsi
-0.05 0.00 0.05
-0.5
0.0
0.5
Figura 6.36 Gráfica Espacio Fase mostrando resonancia para a=2.5mm y β=300
Time
psi
0 2 4 6 8 10
-0.05
0.00
0.05
Figura 6.37 Gráfica de desplazamiento mostrando resonancia para a= 2.5mm y β=300
134
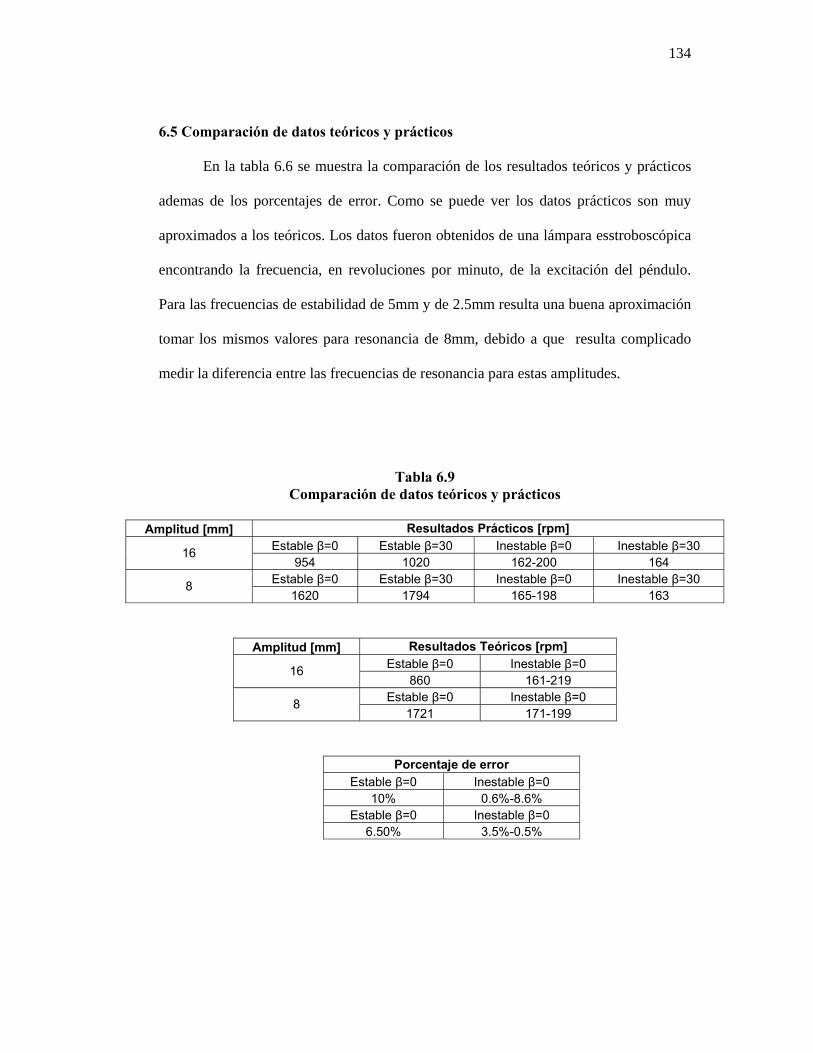
6.5 Comparación de datos teóricos y prácticos
En la tabla 6.6 se muestra la comparación de los resultados teóricos y prácticos
ademas de los porcentajes de error. Como se puede ver los datos prácticos son muy
aproximados a los teóricos. Los datos fueron obtenidos de una lámpara esstroboscópica
encontrando la frecuencia, en revoluciones por minuto, de la excitación del péndulo.
Para las frecuencias de estabilidad de 5mm y de 2.5mm resulta una buena aproximación
tomar los mismos valores para resonancia de 8mm, debido a que resulta complicado
medir la diferencia entre las frecuencias de resonancia para estas amplitudes.
Tabla 6.9 Comparación de datos teóricos y prácticos
Amplitud [mm] Resultados Prácticos [rpm]
Estable β=0 Estable β=30 Inestable β=0 Inestable β=30 16 954 1020 162-200 164
Estable β=0 Estable β=30 Inestable β=0 Inestable β=30 8 1620 1794 165-198 163
Amplitud [mm] Resultados Teóricos [rpm] Estable β=0 Inestable β=0 16
860 161-219 Estable β=0 Inestable β=0 8
1721 171-199
Porcentaje de error
Estable β=0 Inestable β=0 10% 0.6%-8.6%
Estable β=0 Inestable β=0 6.50% 3.5%-0.5%














