Capitulo 3. Distribucion de Esfuerzos en Una Masa de Suelos (2)
Upload
isaac-diaz-saidCategory
view
70download
1
CAPÍTULO 2
DEFORMACIÓN

Al aplicar cargas a un sólido, éste se deforma.
Vamos a suponer que, las deformaciones que se producen dentrodel sólido son “pequeñas”de manera tal que, la geometría del sólidoantes y después de deformarse es, a efectos prácticos, la misma.
Sólido deformadoSólido sin deformar

DEFORMACION LONGITUDINAL
0L l
l∆=ε

( )PQ
PQQPlimPx
x−
=∗∗
→∆ 0ε
( )[ ] ( )[ ]PuxQuxxOPOQQP +−+∆+=−= ∗∗∗∗
( ) ( ) uPuQuPQQP ∆=−=−∗∗
( )P0xx dx
duxulimP ⎟
⎠⎞
⎜⎝⎛==
→ ∆∆ε
∆
∆x
Configuraciónsin deformar
Configuracióndeformada
x = posición geométricau = desplazamiento experimentado

sss
AB ∆∆−∆
=→
*limn along
ε
( )
1
1
−∆
∆≈
∆+≈∆
ss
ss*
*
ε
ε
a lo largo de n
Sólidono deformado
Sólidodeformado
A
B
n
∆s
A*
B*
∆s*

DEFORMACION ANGULAR, TANGENCIAL, DE CORTE O DE CIZALLADURA
htg yzyz
δγγ =≈
δτ
γyz
yx
z
yz
h

[ ]∗∗∗
→→
−= RPQ ánguloQPR ánguloγ
PRPQP lim
[ ]∗∗∗
→→
−= RPQ ánguloπγ
PRPQP 2lim
Configuraciónsin deformar
Configuracióndeformada

Las tensiones tangenciales actuando en un punto elásticoson la causa de aparición de las deformaciones angulares.Estas deformaciones no llevan aparejadas alargamientoso acortamientos del punto elástico sino que, simplemente,distorsionan su geometría.
τyx
x
y
τxy
τyx
x
y
τxy
2γ
2γ
γπ−
2
γπ+
2

Considerando un punto elástico (dimensiones infinitesimales), podemosdeterminar sus dimensiones finales así como los ángulos girados por sus lados
xyγπ−
2 yzγπ−
2 zxγπ−
2
(1+εx)dx (1+εy)dy (1+εz)dz
Punto elásticoantes de deformarse:
Punto elásticodeformadoy
x
z
dxdy
dz
εydy
εzdz
2/yzγ

CAMPO DE DESPLAZAMIENTOS (u,v,w) DENTRO DE UN SÓLIDO
z
y
x
j
i
k P
Q
P*
Q*δQ
δP
d r d r*
0
P P*
Q Q*
Vector desplazamiento en P = PP* = δP
Vector desplazamiento en Q = QQ* = δQ
kwjviuP
rrrr++=δ
kwjviuQrrrr
''' ++=δ
u=u(x,y,z)v=v(x,y,z)w=w(x,y,z)
Funcionescontinuas dex,y,z

Relación entre (u’,y’,z’) y (u,v,w):
u' = u + ∂u∂x
dx + ∂u∂y
dy + ∂u∂z
dz
v' = v +∂v∂x
dx +∂v∂y
dy +∂v∂z
dz
w' = w +∂w∂x
dx +∂w∂y
dy +∂w∂z
dz
⎫
⎬
⎪ ⎪ ⎪
⎭
⎪ ⎪ ⎪
[ ] rd MPQrrr
+δ=δ
[ ]
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
zw
yw
xw
zv
yv
xv
zu
yu
xu
M
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂

[ ]
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
zw
yw
xw
zv
yv
xv
zu
yu
xu
M
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
[ ] [ ]44444444 344444444 2144444444 344444444 21
simétricaDicahemisimétrW
zw
zv
yw
zu
xw
yw
zv
yv
yu
xv
xw
zu
xv
yu
xu
zv
yw
zu
xw
yw
zv
yu
xv
xw
zu
xv
yu
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛ +
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⎟⎠⎞
⎜⎝⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛ −
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−
⎟⎠⎞
⎜⎝⎛ −⎟⎟
⎠
⎞⎜⎜⎝
⎛−
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
21
21
21
21
21
21
021
21
210
21
21
210
=
Descomposición de la matriz [M]
P
Q
P*
Q*δQ
δP
d r d r*
[ ] rd MPQrrr
+δ=δ
[ ] [ ]( ) rd DWPQrrr
++δ=δ
dr r ∗ = dr r +
r δ Q −
r δ P
[ ] [ ] rd Drd Wrdrd rrrr ++=∗
[ ] [ ]( ) [ ] rd Drd WIrd rrr ++=∗

a) Traslación de definida por
b) Giro definido por la matriz hemisimétrica
c) Deformación definida por la matriz
→∗
→
→ 1QP PQ
→∗
→∗ → 21 QPQP→
∗∗→
∗ → QPQP 2
Descomposición de movimientos

Los pasos a) y b) son comunes (traslación + giro) para todos los puntos del entorno del punto P, por lo que no producen variación relativa alguna (deformación) de las distancias entre el punto P y dichos puntos. Sólo el paso c) es el que produce deformaciones en el entorno del punto P y el tensor correspondiente, que admite una representación a través de la matriz [D] respecto al sistema de coordenadas que estamos empleando, se denomina Tensor de Deformaciones

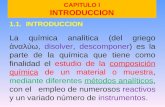
INTERPRETACION FISICA DE LAS COMPONENTES DEL TENSOR DE DEFORMACIONES
εx =∂u∂x
, εy =∂v∂y
, εz =∂w∂z
,
γ xy =∂u∂y
+∂v∂x
, γ xz =∂u∂z
+∂w∂x
, γ yz =∂v∂z
+∂w∂y
D[ ]=
εxγ xy
2γ xz
2γ xy
2εy
γ yz
2γ xz
2γ yz
2εz
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥

tgα = α = ∂v∂x
tgβ = β = ∂u∂y
⎫
⎬ ⎪
⎭ ⎪
⇒ γ xy = α +β =∂u∂y
+∂v∂x
x
y
P A
BP* A*
B*
vudy
dx
dxxv
∂∂
xdxuu
∂∂
+
dyyu
∂∂
dyyvv
∂∂
+
α
β

DEFORMACIONES EN UNA DIRECCION CUALQUIERAVector deformación unitaria: ε
r
[ ] [ ] [ ] [ ] uDdrrdD
rrlimD
rrDlim 0r0r
vrrr
r==== →→ ∆
∆∆
∆ε ∆∆
π

Deformación longitudinal unitaria, εn, definida como:
Componentes intrínsecas de :
[ ]( )
lnmnlmnml
u uD=u=u sobre .proy
xzyzxy2
z2
y2
xn
n
γ+γ+γ+ε+ε+ε=ε
⋅⋅⋅εε=ε rrrrrr
Deformación angular unitaria:
n /2γ
2n
2n
2
41 γεε +=
εr
Relación:
[ ] uD vr=ε

DIRECCIONES PRINCIPALES E INVARIANTES¿Para qué direcciones el vector deformación es perpendicular al plano correspondiente?
⇓
=−
TICACARACTERIS ECUACION 0ID ε
0322
13 =−+− III εεε
u
yxxyyxxy γγεε21
21
===
[ ][ ] 0
rr
rr
=−
=
uID
uuD
ε
ε
γxy//2
γxy//2
γxy//2γxy//2
xx
yy
Dirección 1
Dirección 2

21
21
21
21
21
21
Izyz
xzx
zyz
yzy
yxy
xyx
2
εγ
γε+
εγ
γε+
εγ
γε=
I zyx1 ε+ε+ε=
DI3 =
0322
13 =−+− III εεε
(Invariante lineal)
(Invariante cuadrático)
(Invariante cúbico)

⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
3
2
1
000000
εε
ε
TENSOR DE DEFORMACIONES EXPRESADO EN EJES PRINCIPALES
3213
3132212
3211
εεεεεεεεε
εεε
=++=
++=
III
Invariantes:

RELACIÓN ENTRE LAS DIRECCIONES PRINCIPALES DE TENSIÓNY DEFORMACIÓN:
Para un sólido con comportamiento isótropo elástico lineal:
Si τ es cero, γ es también nula: Las direcciones principales de tensiónCoinciden con las de deformación.
Gτγ =
σmax, εmax
σmin, εmin
σint, εint

DEFORMACIONES VOLUMETRICA Y DESVIADORA
inicialVol.inicial Vol. - final Vol.eV =
Volumen inicial= dx.dy.dz
Volumen final= dx ⋅ dy ⋅dz ⋅ 1 + εx( )1 + εy( )1+ εz( )=
dx ⋅ dy ⋅dz ⋅ 1 + εx + εy + εz + εx εy +. ... .. .[ ]( )
zyxV εεεe ++= = I1
=

4444 34444 21
44 344 21
4444 34444 21desviadora Comp
zyzxz
yzyxy
xzxyx
avolumetric Comp
V
V
V
ndeformacio de Tensor
zyzxz
yzyxy
xzxyx
εγγ
γεγ
γγε
ee
e
εγγ
γεγ
γγε
.
.'
21
21
21
'21
21
21
'
000000
21
21
21
21
21
21
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
VzzVyyVxx
zyxV
eee
e
−=−=−=
++=
εεεεεε
εεε
' ; ' ; '

ECUACIONES DE COMPATIBILIDAD( ) k)z,y,x(wj)z,y,x(vi)z,y,x(uz.y.x
rrrr++=δ
Las tres funciones u,v,w (campo de desplazamientos) no pueden expresarse arbitrariamente en función de x, y, z, sino que tendrán que verificar unas determinadas relaciones para que los campos de desplazamientos y de deformaciones que experimenta el sólido sean físicamente posibles.
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
+∂
∂⋅
∂∂
=∂⋅∂
∂⋅
∂⋅∂∂
=∂∂
+∂
∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
−∂
∂⋅
∂∂
=∂⋅∂
∂⋅
∂⋅∂
∂=
∂∂
+∂
∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
+∂
∂−⋅
∂∂
=∂⋅∂
∂⋅
∂⋅∂
∂=
∂
∂+
∂∂
zyxzyxzxxz
zyxyxzzyyz
zyxxzyyxxy
xyxzyzzxzzx
xyxzyzyyzzy
xyxzyzxxyyx
γγγεγεε
γγγεγεε
γγγεγεε
22
2
2
2
2
22
2
2
2
2
22
2
2
2
2
2
2
2
;
;
;

CAMBIO DEL SISTEMA DE REFERENCIA (2D)Conocidas las componentes del tensor de deformaciones (εx,εy,γxy/2) en un punto referidas a un sistema cartesiano de referencia x,y, veamos cuales son las componentes de dicho tensor respecto de otro sistema cartesiano x’,y’tal que, el su eje x’, forma un ángulo θ. Llamemos (εx’,εy’,γx’y’/2)a las componentes respecto del nuevo sistema de referencia.
x
σx’σy’ τx’y’
σx
σyτxy
y
x’y’
θ

( ) θγθεεγ
θγ
θεεεε
ε
θγ
θεεεε
ε
2cos2sen
2sen2
2cos22
2sen2
2cos22
''
'
'
xyyxyx
xyyxyxy
xyyxyxx
+−−=
−−
−+
=
+−
++
=
γx’y’ / 2
γx’y’ / 2
γy’x’ / 2
γy’x’ / 2
x
x’
yy’

CIRCULO DE MOHR EN DEFORMACIONES
ε
γ/2
ε
γ/22
4
2''
2
2' Ryxyxx =+⎟
⎟⎠
⎞⎜⎜⎝
⎛ +−
γεεε
42R
2xy
2yx γεε
+⎥⎦
⎤⎢⎣
⎡ −=
τyx
x
y
τxy
2γ
2γ
τxy
τxy
CRITERIO DE SIGNOS:

εx
εy
γxy
x
y
ε
γ/2Dirección y
Dirección x
ε1ε2