CAPÍTULO 1.- INTRODUCCIÓN AL ALGEBRA TENSORIALexordio.qfb.umich.mx/archivos PDF de trabajo...
28
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga 5 ú n ' { P P * P P ' ( x 1 , x 2 , x 3 , ..., x n ) , x i 0 ú } , P v ' P OP 0 ú n (1) 1). & SUMA : P u % P v ' ( u 1 % v 1 , u 2 % v 2 , ..., u n % v n ) ' ( u i % v i ) 0 ú n 2). & Producto por un Escalar : α P u ' ( α u 1 , α u 2 , ..., α u n ) ' ( α u i ) 0 ú n 3). & Producto Escalar : P u @ P v ' ( u 1 v 1 % u 2 v 2 % ... % u n v n ) ' ( u i v i ) 0 ú 4). & NORMA o Tamaño : 2 P u 2 ' P u @ P u ' u 2 1 % u 2 2 % ... % u 2 n 0 ú % 5). & Distancia Euclideana : d ( P P , P Q ) ' 2 P P & P Q 2 ' ( P P & P Q ) @ ( P P & P Q ) (2) CAPÍTULO 1.- INTRODUCCIÓN AL ALGEBRA TENSORIAL 1.1.- ESPACIOS EUCLIDEANOS EN ú n (n = 1, 2, 3, ... ) Definición .- ú n es el espacio n-dimensional cuyos elementos se llaman puntos o vectores r P , los cuales son definidos por sus componentes o n-adas de números reales. r v Debido a que sus elementos son vectores, también se dice que ú n es un espacio vectorial de dimensión n o multidimensional. En ú n existen las siguientes operaciones vectoriales para cualesquier u, v, P, Q 0 ú n : Además aceptamos como válidas las siguientes propiedades algebraicas fundamentales del espacio vectorial ú n : (demostraciones en Hasser et al., 1970). 6).- La suma de vectores es cerrada en ú n . 7).- Existe el 0 0 ú n o elemento neutro aditivo. 8).- La suma de vectores es conmutativa. 9).- La suma de 3 vectores es distributiva. 10).- œ v 0 ú n , › -v 0 ú n tal que -v + v = 0. 11).- Si r es un escalar entonces rv 0 ú n . ú n es el espacio euclideano n-dimensional y, en particular si n = 2 o 3, todas las propiedades y teoremas de la geometría plana y del espacio son aceptadas como el punto de partida de estas notas.
Transcript of CAPÍTULO 1.- INTRODUCCIÓN AL ALGEBRA TENSORIALexordio.qfb.umich.mx/archivos PDF de trabajo...
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
5
ún
' PP * PP ' ( x1
, x2
, x3
, . . . , xn
) , xi0 ú , Pv '
POP 0 ún (1)
1 ) . & SUMA : Pu % Pv ' ( u1
% v1
, u2
% v2
, . . . , un
% vn
) ' ( ui% v
i) 0 ú
n
2 ) . & Producto por un Escalar : α Pu ' ( α u1
, α u2
, . . . , α un
) ' ( α ui
) 0 ún
3 ) . & Producto Escalar : Pu @ Pv ' ( u1
v1
% u2
v2
% . . . % un
vn
) ' ( ui
vi
) 0 ú
4 ) . & NORMA o Tamaño : 2 Pu 2 ' Pu @ Pu ' u2
1% u
2
2% . . . % u
2
n0 ú
%
5 ) . & Distancia Euclideana : d ( PP , PQ ) ' 2 PP &PQ 2 ' ( PP &
PQ ) @ ( PP &PQ )
(2)
CAPÍTULO 1.- INTRODUCCIÓN AL ALGEBRA TENSORIAL
1.1.- ESPACIOS EUCLIDEANOS EN ún (n = 1, 2, 3, ... )
Definición.- ún es el espacio n-dimensional cuyos elementos se llaman puntos o vectoresrP
, los cuales son definidos por sus componentes o n-adas de números reales.rv
Debido a que sus elementos son vectores, también se dice que ún es un espacio vectorial dedimensión n o multidimensional. En ún existen las siguientes operaciones vectoriales paracualesquier u, v, P, Q 0 ún :
Además aceptamos como válidas las siguientes propiedades algebraicas fundamentales delespacio vectorial ún : (demostraciones en Hasser et al., 1970).
6).- La suma de vectores es cerrada en ún. 7).- Existe el 0 0 ún o elemento neutroaditivo.
8).- La suma de vectores es conmutativa. 9).- La suma de 3 vectores es distributiva.10).- œ v 0 ún, › -v 0 ún tal que -v + v = 0. 11).- Si r es un escalar entonces rv 0 ún.
ún es el espacio euclideano n-dimensional y, en particular si n = 2 o 3, todas las propiedadesy teoremas de la geometría plana y del espacio son aceptadas como el punto de partida de estasnotas.
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
6
œ Px , Py 0 õ ' ún
; Px @ Py ' x1
y1
% x2
y2
% . . . % xn
yn
' j
n
i ' 1
xi
yi
' xi
yi
(3)
2 Px 2õ
' Px @ Px œ Px 0 õ (4)
Px ' x1
Pe1
% x2
Pe2
% . . . % xn
Pen
' j
n
i ' 1
xiPe
i' x
iPe
i, œ Px 0 õ ; 2 Pe
i2 ' 1 (5)
1.2.- PROPIEDADES DE LA NORMA DE õ.
Una vez enunciadas las propiedades del Espacio Euclidiano ún establecemos, en forma breve,las propiedades de su norma:
1).- õ = ún es un espacio vectorial con un producto escalar discreto definido por:
2).- Existe una norma 2* 2en õ definida como :
la cual tiene las propiedades evidentes siguientes:
a) 2x2õ $ 0 y es nula ] x = 0b) 2α x2õ = *α* 2x2õ, œ α 0 ú, œ x 0 õc) 2x + y2õ # 2x2õ + 2y2õ (Desigualdad del Triángulo).
3).- Existe un conjunto de vectores llamado base, B = ei, i = 1, n d õ tales que œ x 0 õ :
Por ejemplo, en coordenadas cartesianas podemos identificar a los vectores unitarios:
e1 = (1, 0, 0,0 ,..., 0), e2 = (0, 1,0 ,0 ,..., 0), e3 = (0, 0, 1, 0,..., 0) ,..., en = (0, 0, 0,..., 0, 1)
1.3.- PRODUCTO VECTORIAL EN ú3:
Con los vectores unitarios: i = (1, 0, 0) ; j = (0, 1, 0) ; k = (0,0,1) ; œ 0 ú3, = (vx ,vy ,vz)r ru v, rv
= vx i + vy j + vz k , con u = (ux , uy , uz), la operación siguiente se llama producto vectorial, suresultado es un vector en ú3 y es definida por:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
7
Pu × Pv ' det
Pi Pj Pk
ux
uy
uz
vx
vy
vz
' /0000
/0000
uy
uz
vy
vz
Pi & /0000
/0000
ux
uz
vx
vz
Pj % /0000
/0000
ux
uy
vx
vy
Pk '
uy
vz& u
zv
y
uz
vx
& ux
vz
ux
vy
& uy
vx
2 Pu × Pv 2õ
' u v * Sen θ * ; con u ' 2 Pu 2õ
, v ' 2 Pv 2õ
(6)
P1
) Pu @ Pv ' Pv @ Pu , œ Pu , Pv 0 õ conmutatividad
P2
) ( Pu % Pv ) @ Pw ' Pu @ Pw % Pv @ Pw , œ Pw 0 õ distributividad
P3
) ( α Pu ) @ Pv ' Pu @ ( α Pv ) , œ α 0 ú , asociatividad
P4
) * Pu @ Pv * # 2 Pu 2õ
2 Pv 2õ
desigualdad de Schwarz
P5
) Cos θ '
Pu @ Pv
2 Pu 2õ
2 Pv 2õ
definición analítica del coseno .
P6
) Pu @ ( Pv × Pw ) ' det
ux
uy
uz
vx
vy
vz
wx
wy
wz
triple producto escalar .
(7)
1.4.- PROPIEDADES BASADAS EN EL PRODUCTO ESCALAR.
1.4.1.- Notación Tensorial. Para cuestiones prácticas de estas notas, consideraremos que untensor generaliza a más dimensiones, el concepto elemental de vector. Así, un tensor de orden0 es cualquier escalar; un tensor de orden 1 es cualquier vector; un tensor de orden 2 es unamatriz; un tensor de orden 3 es una estereo-matriz, etc., hasta tensores de orden n que sonentidades bastante más abstractas, pero sumamente útiles. La notación tensorial que usamosproviene de una convención internacional introducida por Einstein en 1914 en su famosotratado de la Teoría General de la Relatividad: “El mismo índice repetido en una fórmulatensorial, indica que las cantidades con índice, se están sumando”. Como ejemplos tenemos yaa las ecuaciones 4 y 6. Esta sencilla convención simplifica notablemente la escritura de todaslas fórmulas tensoriales del Análisis. Ahora bien, las leyes de la Física del Continuo seescriben, todas , en términos de Álgebra y Cálculo Tensorial, por lo tanto, es muy importanteaprender a usar y entender esta notación. Enseguida defino a algunos tensores importantes.

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
8
δij
'
1 si i ' j
0 si i … jY ( δ
ij) '
1 0 0
0 1 0
0 0 1
' ø (8)
L ( a Pu % b Pv ) ' a L Pu % b L Pv , œ a , b 0 ú (9)
Ejemplo 1: Escritura tensorial de los vectores de la base B1 = εi , i = 1, n en términos delos vectores de otra base B2 = ej, j = 1, n.
εi =Pij ej = Pi1 e1 + Pi2 e2 + Pi3 e3 Se suma sobre j = 1,2,3 y se tienen 3 ecuaciones (i = 1, 3).
Obviamente la fórmula de la izquierda es mucho mas simple y práctica para usar. Obsérveseque las fórmulas de la izquierda pueden escribirse en forma matricial.
1.5.- EL TENSOR UNITARIO δij O DE KRONECKER (tensor de orden 2 en ú3):
Se le define como el producto escalar de los vectores unitarios base: δij= ei · ej (œ i, j = 1,2,3).Siendo un tensor de orden 2 (diremos 2-tensor)acepta la siguiente representación matricial:
Es decir, el tensor de Kronecker es idéntico a la matriz unitaria.
Definición.- Un mapeo u operador lineal en ún es la función L: ún 6úm tal que:
Definición de Tensor-2.- Un tensor T de orden 2 es un operador lineal T: õ 6 õ que estableceuna relación entre cada vector x 0 õ con otro vector y 0 õ del mismo espacio a través de lacorrespondencia abstracta:
T (x) = y
Si õ = ú3 , el tensor-2 de la definición anterior queda determinado de manera única al conocerlos valores que adquiere al aplicarse u operar sobre los tres vectores de la base ortonormal ei: T(ei) = Tij ej = Ti1 e1 + Ti2 e2 + Ti3 e3 , (3 ecuaciones para i = 1,2,3)
Por tanto T admite una representación matricial similar a la anterior en la base ortonormal ei:

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
9
Τ '
T11
T12
T13
T21
T22
T23
T31
T32
T33
' ( Tij
) (10)
Py 'PT ( Px ) '
PT ( xiPe
i) ' x
i
PT ( Pei
) ' xi
Ti1
Pe1
% xi
Ti2
Pe2
% xi
Ti3
Pe3
'
( x1
T11
% x2
T21
% x3
T31
) Pe1
% ( x1
T12
% x2
T22
% x3
T32
) Pe2
% ( x1
T13
% x2
T23
% x3
T33
) Pe3
'
'
x1
T11
% x2
T21
% x3
T31
x1
T12
% x2
T22
% x3
T32
x1
T13
% x2
T23
% x3
T33
' ( x1
x2
x3
)
T11
T12
T13
T21
T22
T23
T31
T32
T33
'
T11
T21
T31
T12
T22
T32
T13
T23
T33
x1
x2
x3
Es decir : PT ( Px ) ' Py ' PxT
Τ ' ΤT
Px
(11)
La relación y definición anterior nos permite calcular el valor de T(x), œ x 0 õ = ú3 . Puestoque T es un operador lineal:
yj ej = y = T(x) = T(xi ei) = xiT( ei), es decir: xiT(ei) = xiTij ej = Tij xi ej = yj ej ] yj =Tij xi
o en forma matricial:
T(x) = y = ΤT x , ΤT = matriz transpuesta de Τ.
Es decir, el vector T(x) = y = ΤT x simplemente se calcula multiplicando la matriz transpuestade Τ por el vector x. Hagamos el cálculo completo sin usar notación tensorial:
TEOREMA 1.- El mapeo T asociado al tensor Τ se calcula œ x 0 ú3 : T(x) = y = ΤT x = xT Τ.
(Demostración: como ya quedó indicada).
1.6.- FORMA BILINEAL ASOCIADA AL TENSOR Τ.

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
10
¼ Py ' Px PyT
'
x1
x2
x3
( y1
y2
y3
) '
x1
y1
x1
y2
x1
y3
x2
y1
x2
y2
x2
y3
x3
y1
x3
y2
x3
y3
'
T11
T12
T13
T21
T22
T23
T31
T32
T33
' ( xi
y (12)
xi
yj
) ' x1
y1
1 0 0
0 0 0
0 0 0
% x1
y2
0 1 0
0 0 0
0 0 0
% . . . % x2
y2
0 0 0
0 1 0
0 0 0
% . . . % x3
y3
0 0 0
0 0 0
0 0 1
(13)
Obviamente el uso de la notación tensorial resulta mucho más simple que efectuar todos loscálculos explícitamente. Al tensor Τ podemos asociable una forma bilineal B definida por elproducto escalar sobre õ: B = (x, y) = x ·T(y), x, y 0 ξ , esto es:
x ·T(y) = xT Τ y = (xiTij ej) (yi ei) = (xiTij) (yi ei · ej) = (xiTij) (yi δij) = (xiTij yj) = = (x1 T1j + x2 T2j + x3 T3j ) yj = B (x, y), œ x, y 0 õ.
Obsérvese que, en particular, calculada sobre los vectores de la base, B nos da:
B (ei , ej) = δii Tij δjj = Tij
Por lo tanto, de cualquier forma bilineal podemos construir un tensor-2
1.7.- EL PRODUCTO TENSORIAL.
Esta operación especial, permite construir un tensor-2 a partir de las coordenadas de dosvectores cualesquiera. Sean x, y 0 õ = ú3 y ei la base ortonormal ya descrita. El productotensorial entre x, y es definido por:
Observamos que la matriz anterior es equivalente a:
que también puede descomponerse en:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
11
) ' x1
y1
1
0
0
( 1 0 0 ) % x1
y2
1
0
0
( 0 1 0 ) % . . . % x2
y2
0
1
0
( 0 1 0 ) % . . . % x3
y3
0
0
1
( 0 0
es decir : Px ¼ Py ' xi
yj
Pei
¼ Pej
' Tij
Pei
¼ Pej
(14)
Px ¼ Py '
1
2
3
( 2 & 1 1 ) '
2 & 1 1
4 & 2 2
6 & 3 3
' ( Tij
) (15)
Ejemplo 2: Formar un tensor-2 con los vectores x = (1, 2, 3) , y = (2, -1, 1).
Solución. Formando el producto tensorial: xi ei q yj ej
De esta forma puede formarse un tensor-2 con cualquier par de vectores.
Por lo tanto el producto tensorial de dos vectores x, y 0 ú3 proporciona un tensor-2 cuyascomponentes son Tij = xi yj , dadas en la base tensorial ei q ej. Nótese que el producto tensoriales un operador lineal (ejercicio para el lector).
TEOREMA 2.- Los tensores de segundo orden forman un espacio vectorial de 9 dimensionessobre ú3, y los vectores ei q ej son una base de ese espacio.
(demostración para el lector )
Con la definición del producto tensorial, comprendemos que el ente matemático llamadoTENSOR es más complejo y sofisticado que el concepto de vector, pues requiere dos vectoresoperados entre sí de la base original ei en vez de uno solo:
Vector: v = viei , Tensor: Τ = Tij ei q ej.
1.8.- ALGUNOS EJEMPLOS DE TENSORES-2.
1.-El tensor de escalamiento S:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
12
Sean S '
Sx
0 0
0 Sy
0
0 0 Sz
; Pv '
vx
vy
vz
Y PS ( Pv ) ' S @ Pv '
Sx
vx
Sy
vy
Sz
vz
0 ú3 (15)
PV ( PP ) ' x Pu & y Puz
'
x u1
% y u2
x u2
& y u1
; Pu '
Cos θ
Sen θY Pu
z'
& Sen θ
Cos θ
Entonces : PV ( PP ) '
Cos θ Sen θ
Sen θ & Cos θ
x
y' V @ PP 0 ú
2
(16)
PR ( PP ) ' x Pu % y PuT
'
x u1
& y u2
x u2
% y u1
'
Cos θ & Sen θ
Sen θ Cos θ
x
y' R @ PP 0 ú
2 (17)
El efecto de este tensor es cambiar el tamaño de los componentes de v 0ú3. Si restringimoscada Si > 0, entonces el efecto del operador S(v) es “escalar” o modificar el tamaño del vectorv original. La transformación es lineal pues S(u + v) = (Si (ui + vi)) = ((Siui)+(Sivi)) = S(u) +S(v), además S(αu) = α S(u). Por lo tanto la matriz de escalamiento es un tensor-2.
2.- La Reflexión V en ú2:
Sean P = (x, y) un punto de ú2 y u = (u1 , u2 ) 0 ú2 un vector unitario. La reflexión se definecomo:
La Transformación V es lineal pues: V(α P) = α xu - α yuz = α V(P); y además V (P1 + P2) =(x1 + x2) u - (y1 + y2) uT = V(P1) + V(P2). Por lo tanto V es un tensor-2 sobre ú2 , llamado tensorde la reflexión con respecto a la recta ‹0 = P 0 ú2 *P = 0 + (i + u) t/2, t 0 ú que es la rectaque pasa por el origen en la dirección ½(i + u). Obsérvese que V V = I y por lo tanto V=V-1 !
3.- La Rotación R en ú2 :
Sean P = (x, y) un punto de ú2 y u = (u1 , u2 ) 0 ú2 un vector unitario. La rotación se definecomo:
La Transformación R es lineal pues: R (α P) = α xu + α yuT = α R (P); y además R (P1 + P2)= R P1 + R P2 = R(P1) + R(P2). Por lo tanto R es un tensor-2 sobre ú2 , llamado tensor rotación

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
13
S '
0 . 5 0 0
0 2 0
0 0 3
; si Pv '
1
1
1
Y PS ( Pv ) ' S @ Pv '
0 . 5
2
3
' Pv(
;
pero con 2 Pv 2 ' 3 … 2 Pv(
2 ' 13 . 25
Ejemplo 3: Sea el escalamiento dado por la matriz:
Este tensor modifica las coordenadas y agranda al vector v.
con respecto al vector u = (cos θ, senθ). Obsérvese que R@ RT = I y por lo tanto RT=R -1 !!
1.9.- EJEMPLOS NUMÉRICOS.
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
14
Pu '
1
2
( 1 , 1 ) , PP ' ( 1 , 1 ) Y PV ( PP ) ' V @ PP '
1
2
1 1
1 & 1@
1
1'
1
2
2
0
Pu ' ( & 1 , 0 ) , PP ' ( x , y ) Y PV ( PP ) ' V @ PP '
& 1 0
0 1@
x
y'
& x
y
Ejemplo 4: Sea la reflexión dada por el angulo θ = 45°= π/4, el vector asociado es:
Este tensor modifica las coordenadas sin cambiar el tamaño del vector v. Si la reflexión es dada porel angulo θ = 180°= π:
Esta reflexión cambia el sentido del eje OX.
Pu '
1
2
( 1 , 1 ) , PP ' ( 1 , 1 ) Y PR ( PP ) ' R @ PP '
1
2
1 & 1
1 1@
1
1'
1
2
0
2
Pu ' ( 0 , 1 ) , Pv ' ( 1 , 2 ) Y PR ( Pv ) ' R @ Pv '
0 & 1
1 0@
1
2'
& 2
1' Pv
z
Ejemplo 5: La rotación dada por el angulo θ = 45°= π/4, tiene como vector asociado:
Este tensor hace girar 45° a cualquier vector v = OP. Si la rotación es dada por el angulorecto θ = 90°= π/2:
Esta rotación transforma cualquier vector en su ortogonal. En cambio la transformación dada por elangulo θ = - π/2 hace girar a v un ángulo negativo de -90° y lo convierte en el opuesto delortogonal anterior: R -π/2 (v) = - vz. La rotación dada por θ = π Y R π (v) = - v hace girar a v180° y lo convierte en su opuesto, o sea, en su inverso aditivo.
1.10.- EL TENSOR DE PERMUTACIÓN (O ALTERNO) DE ORDEN 3.
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
15
gijk
'
1 , si i … j … k y la permutación es par
0 , si cualquier índice está repetido
& 1 , si i … j … k y la permutación es impar
(18)
0 1 0
& 1 0 0
0 0 0
;
0 0 & 1
0 0 0
1 0 0
;
0 0 0
0 0 1
0 & 1 0
; i , j ' 1 , 2 , 3
k ' 3 k ' 2 k ' 1
(19)
Pei
× Pej
' gijk
Pek (20)
Pa × Pb ' aiPe
i× b
jPe
j' a
ib
jPe
i× Pe
j' a
ib
jg
ijkPe
k' g
ijka
ib
jPe
k(21)
Este tensor se define como:
εijk es un tensor de orden 3 que se representa como una estereo- matriz en tres niveles:
El tensor (εijk ) tiene por lo tanto 27 componentes, 9 en cada uno de sus 3 niveles. Sus valoresexplícitos son:
ε123 = ε312 = ε231 = 1 , ε213 = ε132 = ε321 = -1, εiik = εijj = εikk = 0 , i = 1, 2, 3; j = 1, 2, 3 ; k = 1, 2, 3
1.11.- PROPIEDADES Y APLICACIONES DE εijk .-
El tensor de permutación es sumamente útil para representar las operaciones vectoriales. Juntocon el tensor de Kronecker δij simplifica todas las fórmulas:
1).- Producto vectorial entre elementos de la base ei:
Esta igualdad se demuestra por simple escritura de cada producto para i, j, k = 1, 2, 3.
2).- Para el producto vectorial de a, b 0 ú3 aplicamos la propiedad 1):
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
16
Pa @ ( Pb × Pc ) ' aiPe
i@ ( b
jPe
j× c
kPe
k) ' a
iPe
i@ ( g
jklb
jc
kPe
l) ' a
ib
jc
kg
jklPe
i@ Pe
l'
' ai
bj
ck
gjkl
δil
' ai
bj
ck
gjki
' ai
bj
ck
gijk
( permutación par jki 6 ijk )
(22)
gijk
glmk
' gij1
glm1
% gij2
glm2
% gij3
glm3
; i , j , k ' 1 , 2 , 3 (23)
gijk
gljk
' δil
δjj
& δij
δjl
' δil
( δ11
% δ22
% δ33
) & δi1
δ1 l
& δi2
δ2 l
& δi3
δ3 l
' 3 δil
& δil
' 2 δil (24)
gijk
gijk
' δii
δjj
& δij
δji
' ( δ11
% δ22
% δ33
) ( δ11
% δ22
% δ33
) & δi1
δ1 i
& δi2
δ2 i
& δi3
δ3 i
' 3 × 3 & δ11
δ11
& δ22
δ22
& δ33
δ33
' 9 & 3 ' 6
(25)
Pa × Pb ' gijk
ai
bj
Pek
' & gjik
bj
ai
Pek
' & bjPe
j× a
iPe
i' &
Pb × Pa (26)
( Pa %Pb ) × Pc ' ( a
i% b
i) Pe
i× c
jPe
j' ( a
i% b
i) c
jg
ijkPe
k' Pa × Pc %
Pb × Pc (27)
3).- Para el triple producto escalar de a, b, c 0 ú3 aplicamos las propiedades 2) y la de δij :
4).- La Identidad Fundamental: εijk εlmk = δil δjm - δim δjl, se demuestra directamenteescribiendo todos los términos que no son 0 en la expresión general:
5.- La propiedad 4) permite deducir otra característica combinada del tensor alterno:
6.- También se construye directamente la siguiente propiedad:
7.- La No Conmutatividad del Producto Vectorial:
8.- Distributividad del Producto vectorial con la suma de vectores:
9.- Fórmula para el triple producto escalar con 4 vectores:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
17
( Pa × Pb ) @ ( Pc × Pd ) ' ( ai
bjg
ijkPe
k) @ ( c
ld
mg
lmnPe
n) ' a
ib
jc
ld
mg
ijkg
lmnPe
k@ Pe
n'
' ai
bj
cl
dm
gijk
glmn
δkn
' ai
bj
cl
dm
gijk
glmk
' ai
bj
cl
dm
( δil
δjm
& δim
δjl
) '
ai
bj
cl
dm
δil
δjm
& ai
bj
cl
dm
δim
δjl
' ai
bj
ci
dj& a
ib
jc
jd
i' ( a
ic
i) ( b
jd
j) & ( a
id
i) ( b
jc
j)
' ( Pa @ Pc ) ( Pb @ Pd ) & ( Pa @ Pd ) ( Pb @ Pc )
(28)
2 Pa × Pb 22
' ( Pa × Pb ) @ ( Pa × Pb ) ' ( Pa @ Pa ) ( Pb @ Pb ) & ( Pa @ Pb ) ( Pb @ Pa ) ' a2
b2
& ( Pa @ Pb )2
Y
2 Pa × Pb 22
' a2
b2
& ( Pa @ Pb )2
' a2
b2
& ( a b Cos θ )2
' a2
b2
( 1 & Cos2θ ) ' a
2b
2Sen
2θ
Y 2 Pa × Pb 2 ' a b * Sen θ * , œ Pa , Pb 0 ú3
; θ 0 [ 0 , 2 π ]
(29)
Pa × ( Pb × Pc ) ' aiPe
i× ( g
jklb
jc
kPe
l) ' a
ib
jc
kg
jklg
ilmPe
m' & a
ib
jc
kg
jklg
imlPe
m
' ai
bj
ck
( δjm
δki
& δji
δkm
) Pem
' ai
bj
ckδ
jmδ
kiPe
m& a
ib
jc
kδ
jiδ
kmPe
m'
' ai
bj
ci
Pej& a
ib
ic
kPe
k' ( a
ic
i) b
jPe
j& ( a
ib
i) c
kPe
k' ( Pa @ Pc ) Pb & ( Pa @ Pb ) Pc
(30)
Sen θ '
2 Pa × Pb 2
a b, Cos θ '
Pa @ Pb
a b, Tan θ '
2 Pa × Pb 2
Pa @ Pb
œ Pa , Pb 0 ú3
; a … 0 , b … 0 (31)
10.- Ecuación del módulo del producto vectorial, deducida directamente de 9, con c = a, d =b.
11.- Fórmula para el triple producto vectorial:
12.- Expresión vectorial de las funciones trigonométricas básicas. La expresión 10 anteriorjunto con la del producto escalar a·b = a b Cos θ nos permite definir tensorialmente a lasfunciones trigonométricas:
13.- Ya demostramos la fórmula (11) para el triple producto vectorial. Obsérvese ahora que eseproducto no es asociativo:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
18
( Pa × Pb ) × Pc ' ( ai
bjg
ijkPe
k) × c
lPe
l' a
ib
jc
lg
ijkg
klmPe
m' a
ib
jc
lg
ijkg
lmkPe
m
' ai
bj
cl
( δil
δjm
& δim
δjl
) Pem
' ai
bj
clδ
ilδ
jmPe
m& a
ib
jc
lδ
imδ
jlPe
m'
' ai
bj
ci
Pej& a
ib
jc
jPe
i' ( a
ic
i) b
jPe
j& ( b
jc
j) a
iPe
i' ( Pa @ Pc ) Pb & ( Pb @ Pc ) Pa
Y ( Pa × Pb ) × Pc … Pa × ( Pb × Pc )
(32)
Sean Pa ' Pei
, Pb ' Pej
, Pc ' Pel
Y ( Pei
× Pej
) × Pel
' gijk
Pek
× Pel
' gijk
glmk
Pem
De ( 13 ) sabemos que : ( Pei
× Pej
) × Pel
' ( Pei@ Pe
l) Pe
j& ( Pe
j@ Pe
l) Pe
i' δ
ilPe
j& δ
jlPe
i
Ambas × Pem
: gijk
glmk
Pem
@ Pem
' ( δil
Pej& δ
jlPe
i) @ Pe
mY g
ijkg
lmk' δ
ilδ
jm& δ
jlδ
im
(33)
Sea Py 0 ú3
* Pb ' Pa × Py Y Pa × Pb ' Pa × ( Pa × Py ) ' ( Pa @ Py ) Pa & ( Pa @ Pa ) Py
Y a2
Py ' ( Pa @ Py ) Pa & Pa × Pb Y › λ 0 ú * 6 Py ' λ Pa &
Pa × Pb
a2
(34)
14.- Demostración de la Identidad Fundamental (4). Nótese que las ecuaciones (11) y (13) también pueden construírse “a pie” usando la definicióndirecta del producto vectorial dos veces (ejercicio para el lector). Demuestro ahora que laimportante relación (4) es una consecuencia inmediatamente deducible de la (13):
15.- La división vectorial: Sean dos vectores no nulos en ú3 tales que a z b :
Diremos que el vector y es la “división vectorial ” de b entre a definida para cualquier λ 0 úarbitrario, siempre y cuando a z b a priori.

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
19
1 . 1 ) Pa × ( Pb × Pc ) … ( Pa × Pb ) × Pc , œ Pa , Pb , Pc 0 ú3
1 . 2 ) ( Pei
× Pej
) × Pel
Y gijk
glmk
' δil
δjm
& δim
δjl
1 . 3 ) Pa @ ( Pb × Pc ) ' ( Pa × Pb ) @ Pc 'Pb @ ( Pc × Pa ) ' & Pc @ ( Pb × Pa )
1 . 4 ) Si T ' ( Tij
) Y det ( Tij
) '
gijk
glmn
6T
ilT
jmT
kn
1 . 5 ) ( Pa × Pb ) @ Pa ' ( Pa × Pb ) @ Pb 'P0
1 . 6 ) Si Pv ' Pa × Pb Y Pv @ Pv ' a2
b2
Sen2θ ; θ ' Ê ( Pa , Pb )
1 . 7 ) Sea Pu un vector unitario y Pv 0 ú3
tal que :
Pv ' ( Pa @ Pu ) Pu % Pu × ( Pa × Pu ) ; pruebe que : Pa ' Pv
(35)
Py '
( Pa × Pb )
a2
% λ Pa , λ 0 ú (36)
Pa ' ( 1 , 1 , 0 ) ; Pb ' ( & 1 , 1 , 1 ) (37)
1.12.- Problemas de Investigación del Capítulo 1
Álgebra Tensorial
1.- Empleando exclusivamente la notación tensorial vista en clase, demuestre brevemente lassiguientes propiedades vectoriales:
Interprete en 1.7 el significado geométrico de la descomposición del vector v en dos direcciones.Demuestre que el ortogonal del vector u no es unitario; ¿cómo hacerlo unitario? Ilustre con un ejemplonumérico.
2.- Sean dos vectores a, b de ú3 mutuamente ortogonales. Sea y otro vector tal que b = y × a.
2.1) Empleando exclusivamente la fórmula 1.1 demuestre que el vector y puede interpretarsecomo la división vectorial b/a mediante la fórmula:
2.2) Especifique el parámetro λ y aplique este resultado calculando y para los siguientesvectores:
2.3) ¿Cuánto debe valer λ para que 2y2 = 3.5 ?
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
20
x2
' Px @ Px ' x2
1% x
2
2% x
2
3
3 . 1 ) PL ( x ) ; 3 . 2 ) PL ( x& n
) ; 3 . 3 ) ∆ (1
x) ; donde ∆ '
PL @ PL ' L2
3 . 4 ) div ( xn
Px ) ; 3 . 5 ) Prot ( xn
Px ) ; con div Pv 'PL @ Pv y Prot Pv '
PL × Pv
(38)
4 . 1 ) div ( f Pv ) ' f div Pv % Pv @ PL f ; 4 . 2 ) PL @ ( g PL f ) ' g ∆ f %PL g @ PL f
4 . 3 ) ∆ ( g f ) ' g ∆ f % 2 PL g @ PL f % f ∆ g ; 4 . 4 ) PL @ ( Pu × Pv ) ' Prot Pu @ Pv & Prot Pv @ Pu
(39)
2 . 0 ) Con Pa ¼ Pb ' ai
bjPe
i¼ Pe
jY 2 . 1 ) Pa @ ( Pb ¼ Pc ) ' ( Pa @ b ) Pc
2 . 2 ) ( Pa ¼ Pb ) @ Pc ' ( Pb @ c ) Pa ; 2 . 3 ) Pa × ( Pb ¼ Pc ) ' ( Pa × b ) ¼ Pc
2 . 4 ) ( Pa ¼ Pb ) × Pc ' Pa ¼ ( Pb × c ) ; 2 . 5 ) ( Pa ¼ Pb ) @ ( Pc ¼ Pd ) ' ( Pb @ Pc ) ( Pa ¼ Pd )
(40)
3 . 1 ) œ Pa 0 ú3
Y Paz
@ T ' Tz
@ Pa ' Tik
aiPe
k… T @ Pa ' T
ika
kPe
i
3 . 2 ) T @ U ' Tik
Ukj
Pei
¼ Pej… U @ T ; 3 . 3 ) Pa @ T @ U ' a
iT
ijU
jkPe
k
(41)
3.- Considere el vector x = x i e i de ú3. Calcule los siguientes operadores diferenciales si su normaes dada por:
4.- Con u, v vectores de ú3 y f, g funciones reales, demuestre las siguientes fórmulas del cálculovectorial:
5.- En el problema 4) defina dos vectores u, v de ú3 y dos funciones reales f, g, de su elección.Recalcule entonces las fórmulas anteriores del análisis vectorial y de ejemplos numéricos.
6.- Empleando exclusivamente la definición de producto tensorial entre vectores de ú3 demuestrelas siguientes propiedades:
7.- Sean T y U dos tensores de ú3. Usando el producto tensorial calcule las siguientes propiedades:
8.- Sea ‹ : ú3 6 ú3 un mapeo tal que œ u, v 0 ú3 : u · ‹ (v) = ± v · ‹ (u). Demuestre que:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
21
a).- si en el miembro derecho de la igualdad, el signo de v es + entonces la matriz A asociadaa ‹ es simétrica;b).- en cambio si el signo de v es - entonces la matriz A asociada a ‹ es antisimétrica.
En ambos casos efectúe las operaciones tensoriales que sean necesarias y escriba explícitamente loselementos de cada matriz. Ejemplifique con un ejemplo numérico para cada caso.
9.- Sea v 0 ú3 , sabemos que en OX1 X 2 X 3 la base ortonormal cartesiana es ei , v = vi ei , dondeei es el vector unitario en la dirección del eje OXi . Considere ahora un nuevo sistema de ejescartesianos Ox1 x 2 x3 obtenido efectuando una rotación alrededor del origen O. La baseortonormal cartesiana en este nuevo sistema es εi , y v = vi’ εi , donde εi es el vector unitario enla dirección del nuevo eje Oxi .
9.1.- Demuestre que v = vi ei = vj δi j ei . Escriba la ecuación vectorial de la recta L en ú3 quepasa por P0 en la dirección v utilizando los cosenos directores de los angulos α, β, γ entre v ylos ejes OX i .
9.2.- Considere ahora a cada uno de los nuevos ejes Oxi (i = 1, 2, 3) obtenidos por la rotaciónanterior, como una recta que pasa por el origen O y cuyos angulos directores sonrespectivamente:
αi = Ê (εi , e1 ); βi = Ê (εi , e2 ), γi = Ê (εi , e3), para i = 1, 2, 3. Escriba las ecuaciones de los 3ejes.
9.3.- A partir del cálculo del producto escalar entre los vectores de ambas bases pij = εi @ ej ,(œi, j = 1, 2, 3) construya una matriz - = (pij ) llamada tensor de pasaje o de transferencia entreambas bases de tal forma que - : ei 6 εi y cuya regla de operación es:
(εi ) = - (ei )
Los paréntesis indican que las componentes vectoriales deben escribirse como columnas.
9.4.- Demuestre que el tensor de la transferencia - entre ambas bases es la rotación quetransformó los ejes OXi en los ejes Ox i de la siguiente forma: como la base εi es ortonormalentonces δij = εi @ εj = εik εjk ; desarrolle este término tensorial en todos sus componentes (œ i, j =1, 2, 3) y construya, “a pie”, las llamadas 9 condiciones de ortonormalidad de los cosenosdirectores de los angulos αi , βi , γi .
9.5.- Reencuentre fácilmente las 9 condiciones anteriores usando ahora el algebra tensorial,mediante un simple cambio de nomenclatura: sean αi = αi1 , βi = αi2 , γi = αi3 . Deduzca que εij =

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
22
T '
2 6 4
0 8 0
4 2 0
(42)
Cos αij (œ i, j = 1, 2, 3). Demuestre entonces que - @ -T = I = (δij ) es el tensor unitario o matrizidentidad, es decir - T = - -1; por eso se dice que - es una matriz ortogonal.
9.6.- Aplicaciones numéricas: Muestre finalmente que las nuevas coordenadas del vector v enla base εi son dadas por : v’ = - @ v = vi εji εj y que v = - T @ v’ y que cualquier tensor T cambiasus componentes según la fórmula:
T’ = - @ T @ -T
Aplique enseguida estos resultados a las rotaciones siguientes:
a). La rotación de 90° tomando a OX2 como eje de rotación (α11 = π/2 = α12 , α13 = π).b). La rotación de 45° tomando a OX2 como eje de rotación (α11 = π/4, α12 = π/2, α13 = 3π/4).
Escriba en ambos casos todas las componentes de - y aplique el cambio de coordenadas alvector (1, 1, 1) y al tensor T cuya matriz es:
c). Calcule los tres invariantes del tensor T en ambos casos. ¿ Qué concluye?
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
23
PT ( Pu ) ' TT
@ Pu ' PuT
@ T ; con : T '
T11
T12
T13
T21
T22
T23
T31
T32
T33
(43)
M '
m11
m12
m13
m21
m22
m23
m31
m32
m33
; Pm1
'
m11
m21
m31
; Pm2
'
m12
m22
m32
; Pm3
'
m13
m23
m33
; o bien : Pmi' m
jiPe (44)
CAPITULO 2.- DESCRIPCIÓN TENSORIAL DE LA DINÁMICA DEL SÓLIDO RÍGIDO O INDEFORMABLE.
2.0.- INTRODUCCIÓN
En este capítulo central de aplicaciones del cálculo tensorial a la Física, muestro que el estudiomatemático de la Dinámica del Sólido Rígido o Indeformable, requiere de la concurrencia devarias ramas de la Matemática: Álgebra Lineal, Análisis Tensorial, Cálculo Diferencial eIntegral y Geometría Diferencial. Al mismo tiempo demuestro de que manera la Mecánica delSólido Indeformable arroja una luz coherente sobre todo el conjunto de esas áreas dematemáticas que se estudian por separado sin un propósito común. El lector o lectora atentos,observarán que esta coherencia, surgida de las aplicaciones a la Mecánica, permite unacomprensión mucho más profunda del Análisis, guiándolos hacia un aprendizaje significativode las estructuras matemáticas del mundo físico que nos rodea.
2.1.- MATRICES, OPERADORES LINEALES Y TENSORES-2 EN õ = ú3.
Ya definimos y mostramos en la sección (1.3) que un tensor-2 es todo operador lineal T: õ Yõ donde T(u) = v 0 ú3 , œ u 0 õ , al cual se le puede asociar siempre una matriz T = (Ti j) enla base ortonormal ei, de tal manera que:
También sabemos ya construir tensores-2 con cualquier par de vectores a, b 0 ú3 mediante elproducto tensorial a q b. También podemos asociarla a cualquier matriz M = (mij ) un operadorlineal o tensor en ú3, de la siguiente forma: Definamos 3 vectores de ú3 con las columnas deM:
Tomemos enseguida cualquier v 0 ú3 y definamos al operador:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
24
PLM
( Pv ) ' ( Pmi@ Pv ) Pe
i' ( Pm
1@ Pv ) Pe
1% ( Pm
2@ Pv ) Pe
2% ( Pm
3@ Pv ) Pe
30 ú
3 (45)
a ) . & PLM
( α Pv ) ' ( Pmi@ α Pv ) Pe
i' α ( Pm
i@ Pv ) Pe
i' α PL
M( Pv ) , α 0 ú
b ) . & PLM
( Pv1
% Pv2
) ' Pmi@ ( Pv
1% Pv
2) Pe
i' ( Pm
i@ Pv
1% Pm
i@ Pv
2) Pe
i'
PLM
( Pv1
) %PL
M( Pv
2)
(46)
Demostración : MT
@ Pv ' mji
Peiq Pe
j@ v
jPe
j' m
jiPv
jPe
i' ( Pm
i@ Pv ) Pe
i'
PLM
( Pv ) (47)
( α1
Pa1
% α2
Pa2
) @ PF ( Pb ) ' &Pb @ PF ( α
1Pa
1% α
2Pa
2) ' ( α
1Pa
1) @ PF ( Pb ) % ( α
2Pa
2) @ PF ( Pb ) '
' & α1
Pb @ PF ( Pa1
) & α2
Pb @ PF ( Pa2
) ' &Pb @ ( α
1
PF ( Pa1
) % α2
PF ( Pa2
) ) ' &Pb @ PF ( Pa )
(48)
obviamente este operador está en ú3 y es lineal pues:
lo cual demuestra el siguiente Teorema:
TEOREMA 3.- En el espacio vectorial õ = ú3 a cada matriz cuadrada M se le puede asociar un Tensor-2 conla operación: LM (v) = M T @ v .
2.2.- OPERADORES LINEALES ANTISIMÉTRICOS.
En la sección anterior demostré que œ matriz M, existe un Tensor LM: õ Y õ cuya regla deoperación es œ v 0 õ, LM (v) = M T @ v = mji vj ei . Consideremos enseguida el siguiente resultado:
TEOREMA 4.-
El mapeo F tal que œ a, b 0 õ Y F : õ Y õ con: a @F(b) = - b @F(a), es un tensor-2antisimétrico.
Demostración: Sean α1, α2 0 ú y a1, a2, b ε õ; sea el vector a = α1a1 + α2a2 entonces dado que a @F(b) = - b@F(a):
como esta igualdad debe ser válida œ b ε õ deducimos que :
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
25
'
0 a12
a13
& a12
0 a23
& a13
& a23
0
'
0 & a21
& a31
a21
0 & a32
a31
a32
0
'
0 a12
& a31
& a12
0 a23
a31
& a23
0
'
0 & a12
a13
a21
0 & a32
& a13
a32
0
(51)
Pek
' δkj
Pej
Y PF ( Pek
) ' aji
δjk
Pei' a
kiPe
iY Pe
k@ PF ( Pe
k) ' Pe
k@ a
kiPe
i' a
kiδ
ki' a
ii
pero : Pek
@ PF ( Pek
) ' & Pek
@ PF ( Pek
) ' & Pek
@ aki
Pei' & a
kiδ
ki' & a
ii' a
ii
esto solo ocurre si : aii
' 0 œ i ' 1 , 2 , 3
(49)
Pej@ PF ( Pe
k) ' Pe
j@ a
kiPe
i' a
kiδ
ji' a
kj
y : & Pek
@ PF ( Pej
) ' & Pek
@ aji
Pei' & a
jiδ
ki' & a
jk' a
kj
es decir : aii
' 0 , aij
' & aji
œ i , j ' 1 , 2 , 3
(50)
F(a) = F(α1a1 + α2a2) = α1F(a1) + α2F(a2)
y el mapeo es lineal. Sea A = (aij ) la matriz asociada al operador F. De la sección anteriorsabemos que œ v ε õ podemos calcular: F(v) = A T @ v = aji vj ei . En particular sobre los vectoresde la base:
Por otra parte tomemos estrictamente j … k, entonces:
La matriz A = (aij ) tiene entonces la siguiente forma:
Una matriz del tipo de A se llama antisimétrica y el mapeo asociado F = ‹A es un operadorlineal antisimétrico. Verifiquemos, que este tensor-2 cumple con la definición original œ a, bε õ:
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
26
Pa @ PLA
( Pb ) ' PaT
@ AT
@ Pb ' PaT
@
0 & a12
& a13
a12
0 & a23
a13
a23
0
@
b1
b2
b3
'
& a12
a1
b2
& a13
a1
b3
% a12
a2
b1
& a23
a2
b3
% a13
a3
b1
% a23
a3
b2
' &Pb
T@ A
T@ Pa ' &
Pb @ PLA
( Pa ) . . . qed .
(52)
Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
27
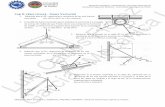
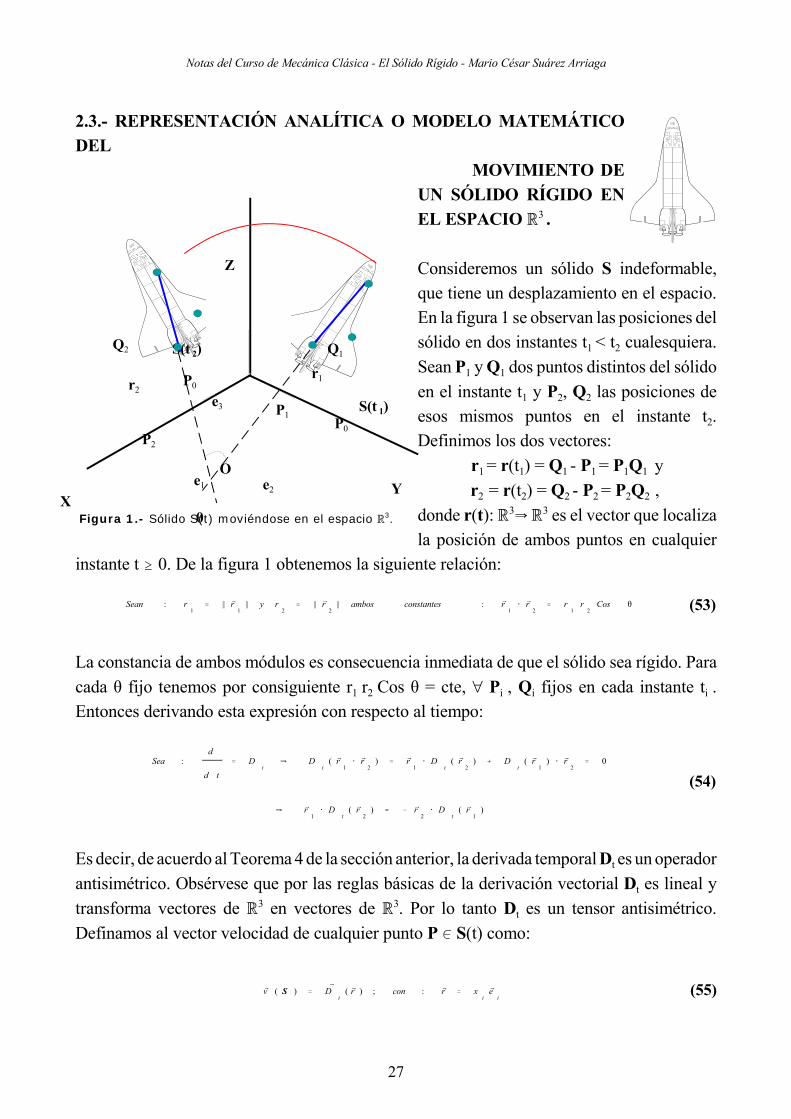
Figura 1.- Sólido S(t) moviéndose en el espacio ú3.
Sean : r1
' 2 Pr12 y r
2' 2 Pr
22 ambos constantes : Pr
1@ Pr
2' r
1r
2Cos θ (53)
Sea :d
d t' D
tY D
t( Pr
1@ Pr
2) ' Pr
1@ D
t( Pr
2) % D
t( Pr
1) @ Pr
2' 0
Y Pr1
@ Dt
( Pr2
) ' & Pr2
@ Dt
( Pr1
)
(54)
Pv ( S ) 'PD
t( Pr ) ; con : Pr ' x
iPe
i(55)
2.3.- REPRESENTACIÓN ANALÍTICA O MODELO MATEMÁTICODEL
MOVIMIENTO DEUN SÓLIDO RÍGIDO ENEL ESPACIO ú3 .
Consideremos un sólido S indeformable,que tiene un desplazamiento en el espacio.En la figura 1 se observan las posiciones delsólido en dos instantes t1 < t2 cualesquiera.Sean P1 y Q1 dos puntos distintos del sólidoen el instante t1 y P2, Q2 las posiciones deesos mismos puntos en el instante t2.Definimos los dos vectores:
r1 = r(t1) = Q1 - P1 = P1Q1 yr2 = r(t2) = Q2 - P2 = P2Q2 ,
donde r(t): ú3Y ú3 es el vector que localizala posición de ambos puntos en cualquier
instante t $ 0. De la figura 1 obtenemos la siguiente relación:
La constancia de ambos módulos es consecuencia inmediata de que el sólido sea rígido. Paracada θ fijo tenemos por consiguiente r1 r2 Cos θ = cte, œ Pi , Qi fijos en cada instante ti .Entonces derivando esta expresión con respecto al tiempo:
Es decir, de acuerdo al Teorema 4 de la sección anterior, la derivada temporal Dt es un operadorantisimétrico. Obsérvese que por las reglas básicas de la derivación vectorial Dt es lineal ytransforma vectores de ú3 en vectores de ú3. Por lo tanto Dt es un tensor antisimétrico.Definamos al vector velocidad de cualquier punto P 0 S(t) como:
Z
S(t 1)
Q1
P2
Q2
Oe2
e1
e3
r2
P1P0
P0r1
S(t 2)
θ
YX

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
28
AT
( t ) '
0 & α12
α13
α21
0 & α32
& α13
α32
0
'
0 & ω3
ω2
ω3
0 & ω1
& ω2
ω1
0
' Ω ; entonces :
PDt
( Pr ) ' Ω @ Pr '
0 & ω3
ω2
ω3
0 & ω1
& ω2
ω1
0
@
x1
x2
x3
'
ω2
x3
& ω3
x2
ω3
x1
& ω1
x3
ω1
x2
& ω2
x1
Es decir : PDt
( Pr ) ' ωi
xjg
ijkPe
k' Pω × Pr
Además : PDt
( Pr ) 'PD
t( POP ) &
PDt
( POP0
) ' Pv ( PP ) & Pv ( PP0
)
(56)
Pv ( PP ) ' Pv ( PP0
) % Pω × Pr (57)
Siendo P cualquier punto en S, entonces se dice que v (P) es el campo vectorial de velocidadesdel solido S. Sea P0 un punto fijo en S escogido arbitrariamente y sea P otro punto cualquierade S. Definimos al vector r = P0P = OP - OP0 con respecto al origen O del sistema decoordenadas cartesianas de la figura 1 en la base ei al que llamamos referencial inercial R0
= OXYZ, el cual se considera fijo en el espacio. Entonces Dt (r) = Dt (OP) - Dt (OP0). Perocomo Dt (r) es un tensor antisimétrico, por resultados del capítulo 1, sabemos que tieneasociada una matriz antisimétrica Ω tal que:
Este resultado completa la demostración del siguiente Teorema Fundamental:
TEOREMA 5.-
El campo vectorial de velocidades de un sólido S rígido, en movimiento con respecto a unreferencial inercial, es un tensor-2 antisimétrico. Conociendo la velocidad de un punto P0 0 Sen cualquier parte del sólido, es posible conocer la velocidad de todo P 0 S mediante lafórmula:
A ω se le llama vector de la Rotación asociado a la matriz antisimétrica Ω del tensor-2 Dt (r).

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
29
Pv ( PP ) ' Pv ( PP0
) % Pω × Pr Y Pv ( PP ) & Pv ( PP0
) ' Pω × Pr ' Pv ( Pr ) 'PD
t( Pr ) (58)
Pv ( Pgi
) 'PD
t( Pg
i) ' Pω × Pg
i'
d Pgi
d t, œ i ' 1 , 2 , 3 (59)
Pgi
×d Pg
i
d t'
Pgi
× ( Pω × Pgi
) ' ( Pgi@ Pg
i) Pω & ( Pg
i@ Pω ) Pg
i, œ i ' 1 , 2 , 3 (60)
Nótese que, aunque P0 es un punto arbitrario del sólido, queda “fijo” una vez que se escoge,pero en realidad continúa moviéndose con el sólido. Por lo tanto su velocidad v (P0) debecalcularse con respecto al origen O que se supone sin movimiento en el referencial inercialv(O) = 0. Al par de vectores velocidad y rotación se le conoce como el Torsor Cinemático deS: τ (v, ω ).
2.4.- CÁLCULO DEL TENSOR DE LA ROTACIÓN EN UN REFERENCIAL MÓVILLIGADO AL SÓLIDO S.
Consideremos ahora un referencial en movimiento conrespecto a los ejes (OX1X2X3) = R0 a quien llamaremosreferencial absoluto o en reposo. Podemos definir unreferencial ligado al sólido en movimiento, con el puntoP0 como el origen y los vectores unitarios ortonormales εi
(t), formando la base ε1 , ε2 , ε3 en movimiento, con P0
(t). Sea P(t) 0 S cualquiera (Fig. 2). esr r r r rr P P P P= = −0 0
un vector móvil de longitud constante, entonces v (r) = v(P) - v (P0) es la velocidad relativa del punto P con respecto a P0. Sabemos que el campovectorial de velocidades de S es el tensor antisimétrico:
Pero r = P0P es cualquier vector dentro del sólido S, en particular la última parte de la ecuaciónanterior debe ser válida para los vectores unitarios de la base móvil εi (t) en S.
Hagamos el siguiente cálculo:
Los vectores εi son ortonormales y sus relaciones en la ecuación diferencial anterior generantres ecuaciones vectoriales que, explícitamente son:
Figura2.- Referencial móvil ligado a S
ε3
ε1e1
ε2
S(t)O
ε1
e3
e2
X3
X1 X2
P0P

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
30
i ' 1 Y Pg1
×d Pg
1
d t' Pω & ω
1
Pg1
i ' 2 Y Pg2
×d Pg
2
d t' Pω & ω
2
Pg2
i ' 3 Y Pg3
×d Pg
3
d t' Pω & ω
3
Pg3
Y Pg1
× PDt
( Pg1
) %Pg
2× PD
t( Pg
2) %
Pg3
× PDt
( Pg3
) ' 3 Pω & ωj
Pgj
(61)
Pω '
1
2
Pgi
× PDt
( Pgi
) (62)
Pω '
& 0 . 568
& 0 . 296
& 0 . 426
rad
seg
(63)
Simplificando se obtiene otra ecuación tensorial fundamental:
Es decir, conociendo Dt (εi (t)) se conoce la rotación del sólido y, por consiguiente, su campode velocidades.__________________Ejemplo Numérico 6.-
Un objeto sólido de forma elipsoidal se desplaza en el espacio ú3. El sólido se consideraindeformable y se encontraba en reposo para t < 0. En el instante t = 0 inicia su movimiento,desplazándose sobre una recta que pasa por el origen y paralela al vector v = (1,1,1). Lascoordenadas de su centro de inercia coinciden con las de su centro de masa, pues eshomogéneo. Su vector de rotación es constante y es dado por:
Calcular el campo vectorial de velocidades y la rapidez en el mismo instante en que el elipsoideinicia su movimiento, en los siguientes puntos del sólido:
P1 = (0, 0, 1), P2 = (1, 1, 0.799), P3 = (3, 0, 0), P4 = (0, 2, 0), P5 = 10-1 (1, 1, 1),
Solución:

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
31
Pv ( PP ) ' Pv ( PP0
) % Pω × PP0
PP ; con : PP ( t ) ' ( x , y , z ) , PP0
( t ) ' ( x0
, y0
, z0
)
P0
se desplaza sobre la recta : ‹0
' PQ 'PO % t ( 1 , 1 , 1 )
(64)
PDt
( POPk
) ' Pv ( PPk
) ' Pω × POPk
'
ω2
zk
& ω3
yk
ω3
xk
& ω1
zk
ω1
yk
& ω2
xk
; k ' 1 , 5 (65)
Pv ( PP1
) ' Pω × POP1
'
& 0 . 296
0 . 568
0 . 0
; 2 Pv ( PP1
) 2 ' 0 . 6405m
s
Pv ( PP2
) ' Pω × POP2
'
0 . 192
0 . 0227
& 0 . 272
; 2 Pv ( PP2
) 2 ' 0 . 3340m
s
Pv ( PP3
) ' Pω × POP3
'
0 . 0
& 1 . 278
0 . 888
; 2 Pv ( PP3
) 2 ' 1 . 5560m
s
Pv ( PP4
) ' Pω × POP4
'
0 . 852
0 . 0
& 1 . 136
; 2 Pv ( PP4
) 2 ' 1 . 42m
s; 2 Pv ( PP
5) 2 ' 0 . 033
m
s
(66)
El campo vectorial de velocidades del sólido es dado por la fórmula general:
P0 es el centro del elipsoide sobre la recta. En el instante t = 0+ , P0 . 0 y por tanto:
Remplazando los valores numéricos dados, obtenemos las velocidades de los distintos puntosdel sólido en el instante en que inicia su movimiento en el espacio:
Mientras más cercano esté el punto P a P0, más próxima su velocidad será a v(P0) = (1, 1, 1),la cual permanece constante durante todo el movimiento (¿ por qué?). Mientras más lejano estéel punto de P0, mayor será su velocidad, como es el caso de P3.
2.5.- Problemas de Opción Múltiple y de Repaso del Capítulo 2.
0.- El movimiento de cualquier partícula material de ú3 tiene:
G A) 3 grados de libertad G B) 2 grados de libertad G C) 6 grados de libertad G D) 1 grado de libertad

Notas del Curso de Mecánica Clásica - El Sólido Rígido - Mario César Suárez Arriaga
32
1.- El centro de masa CM de un sistema S de N partículas materiales de ú3 es un:
G A) operador antisimétrico G B) vector esfuerzo G C) promedio espacial G D) promedioponderado
2.- La velocidad del centro de masa de un sistema de N partículas materiales de ú3 es un:
G A) promedio ponderado G B) operador lineal del sistema G C) derivada G D ) m o m e n t u mespecífico
3.- Escriba mediante fórmulas la posición, velocidad, aceleración y momentum del centro de masa CM:
4.- Si S1 y S2 son dos sistemas de partículas, entonces su interacción o efecto mutuo es una: G A) fuerza G B) constante G C) intercambio de momentum G D) proporcional a su
aceleración
5.- Bajo las condiciones anteriores, la fuerza externa actuando sobre un sistema de partículas es una:
G A) operación tensorial G B) cambio en el momentum G C) operación derivada G D) ley deconservación
6.- La masa reducida de un sistema de partículas se refiere a una:
G A) promedio ponderado G B) idea abstracta G C) confusión G D ) r o t a c i ó n c o ntraslación
7.- La relación entre el momentum angular de S y la torca se puede interpretar como un:
G A) Gradiente G B) D t vector G C) producto vectorial G D) - ω × CM
8.- Establezca la relación entre el momentum angular de S con respecto al CM y con respecto al origen O:
9.- Demuestre la relación que hay entre el momentum angular de S y la torca, con respecto al CM :
10.- Establezca el principio de conservación de la Energía Mecánica para un sistema S de partículas:









![Espacios Vectoriales · Generadores de un espacio vectorial Semana 7 [15/39] Caracterización de base Proposición V espacio vectorial, B = {vi}n i=1 ⊆ V es una base si y sólo](https://static.fdocument.org/doc/165x107/5eb8ecd4d3e35825951055c0/espacios-vectoriales-generadores-de-un-espacio-vectorial-semana-7-1539-caracterizacin.jpg)