Capitolul 5 6 - CINEMATICA P.M Miscarea Generala a Rigidului
27
-65- Capitolul 5 ― CINEMATICA PUNCTULUI MATERIAL CURSUL 10 14.05.2014 PARTEA A DOUA ― CINEMATICA Cinematica ( i mişcare χ νημα = ) are ca obiectiv central studiul mişcării mecanice a sistemelor materiale, fără a lua în considerare proprietățile de masă şi sistemul de forţe care acţionează asupra lor, urmărindu-se în exclusivitate aspectul geometric al mişcării. În studiul cinematic al mișcării mecanice se utilizează ca noțiuni fundamentale: spațiul, timpul, viteza şi accelerația. Sistemul material, invocat în acest studiu, include punctul material, sistemul discret de puncte materiale, solidul rigid şi sisteme de solide rigide. Mișcarea sistemului material se analizează în raport cu un sistem de referinţă considerat în mod convenţional fix, rezultând astfel mișcarea absolută. Dacă mișcarea aceluiași sistem material este analizată în raport cu un sistem mobil, rezultă mișcarea relativă. Studiul mişcării sistemului material faţă de un sistem de referinţă fix sau relativ, se efectuează cu ajutorul unor mărimi geometrice (distanţe sau unghiuri), care se exprimă ca funcţii de parametrul timp, considerat ca variabilă independentă. Dacă parametrii geometrici ce caracterizează poziţia sistemului au valori constante, sistemul material se află în repaus, în caz contrar sistemul se află în mişcare. Analiza cinematică a sistemului material constă în stabilirea următoarelor elemente fundamentale: traiectoria, viteza şi accelerația în cazul unui punct material, respectiv ecuațiile de mișcare, distribuția de viteze şi distribuția de accelerații, în cazul unui corp rigid sau sisteme de corpuri. Capitolul 5. Cinematica punctului material În mecanica teoretică, punctul material reprezintă un model mecanic, adică o ipoteza simplificatoare, drept urmare punctul material este considerat un punct geometric, noțiunea fiind extinsă şi asupra corpurilor, a căror formă geometrică nu influenţează mişcarea mecanică. Studiul cinematic al punctului material, conform aspectelor de mai sus, consta în determinarea traiectoriei, respectiv vitezei si accelerației, împreuna cu componentele acestora în diferite sisteme de coordonate. Traiectoria punctului material Prin definiţie, traiectoria reprezintă locul geometric al tuturor poziţiilor succesiv ocupate, într-un interval finit de timp, de către un punct material între două stări ale sale: una iniţială notată 0 M şi cealaltă finală f M. În Fig. 1, se ia în studiu un punct material mobil, care se deplasează pe traiectoria curbilinie () Γ , poziţionat la momentul iniţial ( ) t 0 = în punctul 0 M prin raza vectoare ( ) r t 0 = ajungând la momentul () t în punctul M caracterizat prin vectorul de poziție ( ) r t . Pe următorul interval de timp finit însă elementar ( tt t , ] +Δ , mobilul descrie arcul elementar 1 MM , noua poziţie fiind M 1 , definită prin vectorul ( ) r t t r r +Δ = +Δ . Observaţie: Parametrul ( ) t Δ este un timp elementar finit, dar foarte mic, în care are loc o creştere elementară a arcului de curbă cu ( ) s Δ , respectiv a vectorului de poziţie r cu ( ) r Δ . Aşa cum se poate vedea din Fig.1, în fiecare moment al mişcării mecanice vectorul de poziţie al punctului material se modifică în modul şi orientare, devenind astfel o funcţie vectorială de timp: ) (t r r = (1) Funcţia vectorială de timp exprimată prin (1) reprezintă ecuaţia vectorială a traiectoriei de mişcare a punctului material, numită şi hodograful mişcării. Pentru a defini mişcarea reală, funcţia vectorială (1) trebuie să îndeplinească anumite condiţii impuse mişcării mecanice de către fenomenul fizic.
-
Upload
alexandragroza -
Category
Documents
-
view
59 -
download
4
description
Mecanica Manual
Transcript of Capitolul 5 6 - CINEMATICA P.M Miscarea Generala a Rigidului
-
-65-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
CURSUL 10 14.05.2014
PARTEA A DOUA CINEMATICA
Cinematica ( i micare = ) are ca obiectiv central studiul micrii mecanice a sistemelor materiale, fr a lua n considerare proprietile de mas i sistemul de fore care acioneaz asupra lor, urmrindu-se n exclusivitate aspectul geometric al micrii. n studiul cinematic al micrii mecanice se utilizeaz ca noiuni fundamentale: spaiul, timpul, viteza i acceleraia.
Sistemul material, invocat n acest studiu, include punctul material, sistemul discret de puncte materiale, solidul rigid i sisteme de solide rigide. Micarea sistemului material se analizeaz n raport cu un sistem de referin considerat n mod convenional fix, rezultnd astfel micarea absolut. Dac micarea aceluiai sistem material este analizat n raport cu un sistem mobil, rezult micarea relativ. Studiul micrii sistemului material fa de un sistem de referin fix sau relativ, se efectueaz cu ajutorul unor mrimi geometrice (distane sau unghiuri), care se exprim ca funcii de parametrul timp, considerat ca variabil independent. Dac parametrii geometrici ce caracterizeaz poziia sistemului au valori constante, sistemul material se afl n repaus, n caz contrar sistemul se afl n micare.
Analiza cinematic a sistemului material const n stabilirea urmtoarelor elemente fundamentale: traiectoria, viteza i acceleraia n cazul unui punct material, respectiv ecuaiile de micare, distribuia de viteze i distribuia de acceleraii, n cazul unui corp rigid sau sisteme de corpuri.
Capitolul 5. Cinematica punctului material n mecanica teoretic, punctul material reprezint un model mecanic, adic o ipoteza
simplificatoare, drept urmare punctul material este considerat un punct geometric, noiunea fiind extins i asupra corpurilor, a cror form geometric nu influeneaz micarea mecanic. Studiul cinematic al punctului material, conform aspectelor de mai sus, consta n determinarea traiectoriei, respectiv vitezei si acceleraiei, mpreuna cu componentele acestora n diferite sisteme de coordonate.
Traiectoria punctului material Prin definiie, traiectoria reprezint locul geometric al tuturor poziiilor succesiv ocupate, ntr-un
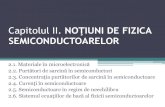
interval finit de timp, de ctre un punct material ntre dou stri ale sale: una iniial notat 0M i cealalt final fM . n Fig. 1, se ia n studiu un punct material mobil, care se deplaseaz pe traiectoria curbilinie ( ) , poziionat la momentul iniial ( )t 0= n punctul 0M prin raza vectoare ( )r t 0= ajungnd la momentul ( )t n punctul M caracterizat prin vectorul de poziie ( )r t . Pe urmtorul interval de timp finit ns elementar (t t t, ]+ , mobilul descrie arcul elementar 1MM , noua poziie fiind M1 , definit prin vectorul ( )r t t r r+ = + .
Observaie: Parametrul ( )t este un timp elementar finit, dar foarte mic, n care are loc o cretere elementar a arcului de curb cu ( )s , respectiv a vectorului de poziie r cu ( )r . Aa cum se poate vedea din Fig.1, n fiecare moment al micrii mecanice vectorul de poziie al punctului material se modific n modul i orientare, devenind astfel o funcie vectorial de timp:
)(trr = (1) Funcia vectorial de timp exprimat prin (1) reprezint ecuaia vectorial a traiectoriei de micare a punctului material, numit i hodograful micrii. Pentru a defini micarea real, funcia vectorial (1) trebuie s ndeplineasc anumite condiii impuse micrii mecanice de ctre fenomenul fizic.
-
-66-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Drept urmare, funcia exprimat prin (1) trebuie s fie: continu, uniform, finit i derivabil n raport cu timpul. Condiiile se datoreaz faptului c punctul material nu poate ocupa simultan mai multe poziii distincte n spaiu, micarea fiind continu, iar derivatele de ordinul nti i doi n raport cu timpul exprim viteza i acceleraia punctului material la momentul ( )t .
Ecuaia vectorial a traiectoriei de micare (1), este echivalent cu trei funcii scalare, reprezentnd ecuaiile parametrice de micare ale punctului material, dup cum urmeaz: n coordonate carteziene: ( ) ( ) ( ); ;x x t y y t z z t= = = (2) n coordonate cilindrice: ( ) ( ) ( ); ;r r t t z z t = = = (3)
unde, r reprezint este raza polar, iar este unghiul polar; n coordonate sferice: ( ) ( ) ( ); ;r r t t t = = = (4)
unde r este raza vectoare, este longitudinea, iar reprezint azimutul. Prin eliminarea parametrului timp din (2)-(4) se obine ecuaia geometric a traiectoriei. Spre exemplu, n spaiul cartezian, aceasta este exprimat prin: ( ) ( ){ }1 2, , 0 ; , , 0f x y z f x y z= = (5) Dac traiectoria este cunoscut, micarea mobilului poate fi studiat cu ajutorul unei singure ecuaii, numit ecuaia orar a micrii, exprimat prin funcia de timp:
( )tss = (6) n aceast expresie, ( )s reprezint lungimea arcului de curb parcurs de ctre mobil de la poziia iniial 0M , pn n poziia M n intervalul finit de timp ](0, t . Micarea punctului material, poate fi exprimat i cu ajutorul coordonatelor curbilinii (coordonatelor generalizate). n acest caz, cunoaterea funciei (1) este echivalent cu a cunoate trei funcii scalare de timp dup cum urmeaz:
( ) ( ) ( )tqqtqqtqq 332211 ;; === (7)
Aa cum s-a artat n prima observaie a acestui paragraf, traiectoria mobilului este divizat n arce elementare finite i foarte mici, notate s , crora le corespund coardele elementare r . innd seama de faptul c r i s au loc n intervalul de timp ( ) tttt += , aceast fragmentare elementar este aproximativ i nu conduce la o modelare exact a traiectoriei. n conformitate cu aproximarea liniar de ordinul nti, se introduce ipoteza prin care coarda elementar i arcul s sunt egale, adic: r s . Aadar, pentru modelarea exacta, conform analizei matematice, se trece la limita n ecuaia de mai jos:
0lims
r drs ds
= = (8)
y
)0( =tr)(tr
)0(0 =tM
)(tM
)(1 ttM +)( ttr +rr +
j
x i
z
k
)(
s
s
O
Fig. 1
-
-67-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Relaia (8) arata ca traiectoria exacta a punctului material este constituita dintr-o succesiune de arce elementare ds , fiecrui arc parcurs n intervalul de timp infinit mic dt , corespunzndu-i coarda elementara dr , cu respectarea condiiei: dr ds . Drept urmare, vectorul , din relaia (8), reprezint versorul tangentei dus prin punctul M la traiectorie, n sensul de micare al punctului.
Aadar, traiectoria descris de punctul material este ntotdeauna considerat o curb continu cu tangent unic n fiecare punct.
Viteza punctului material Studiul cinematic al punctului material se extinde asupra vitezei, care exprima n sens larg,
variaia spaiului parcurs de punctul material n unitatea de timp. Lund n considerare aspectele prezente n 5.1, precum si vectorii ce exprima poziia punctului material la momentul t si momentul t t+ , urmtoarea ecuaie vectoriala caracterizeaz viteza liniara medie pe intervalul de timp t a punctului material, adic:
( ) ( ) mr t t r t r r r r vt t t+ + = = = (9)
i arat c viteza liniar medie este o mrime vectorial, dar aproximativ.
Pentru a obine o valoare exact a vitezei, innd seama de considerentele cu privire la modelarea exact sub aspect matematic a micrii punctului material, n expresia (9) se trece la limit, atunci cnd
0t . Astfel, se obine viteza liniar a punctului material M instantanee momentului t , cu urmtoarea expresie:
( )0
limt
r r r drv rt dt
+ = = =& (10)
unde simbolul: ddt
= (11) reprezint derivata absolut de ordinul nti n raport cu timpul, aplicat funciei aflata n parantez.
Pentru a exprima modul i orientarea vectorului vitez, asupra ecuaiei (10), se efectueaz urmtoarele transformri:
0 0 0
lim lim limt t t
r s s rvt s t s
= = (12)
y
rr
M
1Mrr +
x
z
)(
vv +
s
O
v
Fig. 2
-
-68-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
unde: 0
limt
s ds st dt
= = & (13) Substituind (8) i (13) n (12), expresia de definiie a vitezei liniare, ia forma: v r s = = & & (14) Observaii: Viteza liniar este aadar, conform cu (10) o mrime vectorial egal cu derivata absolut de ordinul nti n raport cu timpul a vectorului de poziie. Viteza liniar instantanee momentului t este un vector orientat dup tangenta la traiectorie n sensul de micare, de cretere a arcului ( )s , iar modulul vectorului viteza reprezint derivata n raport cu timpul a spaiului parcurs de ctre punctul material n intervalul finit de timp ],0( t .
Unitatea de msur n Sistemul Internaional ( )SI pentru vitez este [ ] ( )smv SI /= . Acceleraia punctului material
Micarea punctului material pe o traiectorie curbilinie se caracterizeaz, n general, prin variaia vectorului vitez n raport cu timpul. Mrimea fizic ce msoar aceast variaie este numit acceleraie liniar. Aadar, caracterizarea cinematic a punctului material este asigurat prin cele trei elemente fundamentale menionate si n partea introductiv a capitolului, adic: traiectoria, viteza si acceleraia. Studiul consacrat acceleraiei liniare se bazeaz pe aspectele descrise n 7.1 si 7.2, precum si pe elementele vectoriale ilustrate grafic n Fig.7.1. n intervalul elementar de timp t , punctul material descrie arcul elementar si finit s . n poziiile limit M si 1M ale arcului, viteza punctului material se caracterizeaz prin vectorul v , si respectiv v v+ . Acceleraia liniar medie, corespunztoare acestui interval de timp, se exprim cu ecuaia vectorial:
( ) ( ) ( )mat
vt
vvvt
tvttv ==
+=+ (15)
innd seama de semnificaia operatorului , acceleraia liniar medie este o mrime aproximativ. Iat de ce pentru determinarea exact a acceleraiei liniare, corespunztoare momentului t , asupra expresiei (15) se aplic limita pentru: 0t . Astfel, se obine acceleraia liniar, instantanee momentului t , cu urmtoarea relaie vectorial:
( ) 220
limt
v v v dv d dr d ra v rt dt dt dt dt
+ = = = = = = & && (16)
unde simbolul: 2
2ddt
= (17) reprezint n exclusivitate derivata absolut de ordinul doi n raport cu timpul, aplicat asupra funciei aflate n parantez.
Modulul si orientarea vectorului acceleraie se determin prin efectuarea unor transformri asupra ecuaiei (16), innd seama c versorul tangent la traiectorie este funcie de timp, adic
( )t = . Substituind (14) n (16), aceasta se transform dup cum urmeaz: ( )
dtds
dtsds
dtd
dtvda +=== &&& , (18)
-
-69-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
unde: sdtsd &&& = , iar d d ds ds d ds
dt dt ds dt ds ds = = = & . (19)
innd seama de (19), ecuaia (18) ia forma urmtoare:
dsdssa += 2&&& (20)
Al doilea termen din membrul drept, conine difereniala dds , care n conformitate cu prima
formul a lui Frenet este substituit sub forma: 1d
ds = , unde
1 reprezint curbura traiectoriei, ecuaia (20) se rescrie dup cum urmeaz:
2sa s = +
&&& , (21)
unde: ,a s = && 2sa =
&, iar a a a = + , (22)
n conformitate cu relaia (22) componentele acceleraiei liniare sunt: acceleraia tangenial notat prin a , respectiv acceleraia normal sau centripetal, simbolizat prin a . Prima component arat variaia modulului vectorului vitez, iar a doua se refer la variaia orientrii vectorului vitez.
Observaii: n micarea curbilinie a punctului material M , acceleraia liniar este o mrime vectorial, exprimat conform cu relaia (16), prin derivata absolut de ordinul nti n raport cu timpul a vectorului vitez sau prin derivata absolut vectorial de ordinul doi n raport cu timpul a vectorului de poziie. Expresia (22) arat c ntotdeauna vectorul acceleraie a este situat n planul osculator, format de tangenta ( ) i normala principal ( ) aplicate n punctul M (vezi Fig.7.3). Normala principal este orientat ntotdeauna spre centrul de curbur al traiectoriei curbilinii. Conform aceleiai figuri, vectorul acceleraie este orientat nspre concavitatea traiectoriei. Unitatea de msur n Sistemul Internaional pentru acceleraie este [ ] ( )2SIa m s= . Un caz particular al micrii punctului material pe o traiectorie curbilinie se produce atunci cnd v cst= . innd seama de (22), componentele acceleraiei liniare, specifice acestui caz particular se
exprim prin:
20; .dv sa s a
dt = = = =&&& (23)
Expresiile (23) arat c dei viteza punctului material rmne constant n modul, acceleraia punctului material este diferit de zero, datorit orientrii variabile a vectorului vitez.
Viteza i acceleraia n diferite sisteme de coordonate n conformitate cu obiectivele acestui capitol, alturi de ecuaiile parametrice de micare i de
traiectorie, studiul cinematic complet al punctului material urmrete stabilirea vitezei si acceleraiei liniare, n conformitate cu ecuaiile de definiie din 7.2 si 7.3.
n aplicaiile tehnice, sunt semnificative pentru studiul cinematic, componentele vitezei si acceleraiei n diferite sisteme de coordonate: carteziene, cilindrice (polare), intrinseci si sferice. O analiz detaliat se prezint n continuarea acestei seciuni.
-
-70-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
5.1.1 Componenta vitezei i acceleraiei n coordonate carteziene Studiul se bazeaz pe elementele vectoriale, ilustrate grafic n Fig. 2 si ecuaiile descrise n
7.2 si 7.3. Ecuaia de plecare n acest studiu este (1), rescris mai jos sub forma urmtoare:
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] .Tr t x t i y t j z t k x t y t z t= + + = (24) Din ecuaiile parametrice de micare n coordonate carteziene incluse n (20) se elimin parametrul timp, rezultnd ecuaia cartezian a traiectoriei de micare, avnd forma general (5), rescris astfel:
( ) ( ){ }1 2; ; 0 ; ; 0 ,f x y z f x y z= = unde ( )1 ; ;f x y z i respectiv ( )2 ; ;f x y z sunt ecuaiile carteziene a dou suprafee care se intersecteaz dup traiectoria de micare a punctului material.
Pentru determinarea componentelor carteziene ale vectorului vitez liniar, se apeleaz ecuaia vectorial de definiie (14), care se rescrie sub forma:
( ) ( )x y z
T Tx y z
v x i y j z k v i v j v k
v r x y z v v v
= + + = + + = =
& & && & & &
. (25)
innd seama de componentele vitezei n coordonate carteziene, n continuare se stabilete modulul si orientarea vectorului vitez, n conformitate cu expresiile:
222 zyxv &&& ++= , (26)
Tyx zvv v
v v v =
. (27)
Componentele acceleraiei liniare n coordonate carteziene au ca ecuaie de plecare (16), proiectat pe axele sistemului de referin cartezian, astfel rezultnd:
( ) ( ) ( )x y z
T T Tx y z x y z
a r x i y j z k a i a j a k
a r x y z v v v a a a
= = + + = + + = = =
&& && && &&&& && && && & & &
, (28)
Modulul si orientarea vectorului acceleraie liniar se stabilesc cu expresiile 222 zyxa &&&&&& ++= (29)
,T
yx zaa aaa a a a
= (30) Conform observaiilor din 7.2 si 7.3, vectorul vitez liniar este orientat dup tangenta la traiectorie n sensul de micare, n timp ce vectorul acceleraie liniar este situat n planul osculator, orientarea acestuia fiind nspre concavitatea traiectoriei de micare.
-
-71-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
CURSUL 11 21.05.2014
5.1.2 Componentele vitezei i acceleraiei n coordonate cilindrice (polare) Spre deosebire de sistemul de coordonate carteziene, considerat fix, sistemul de coordonate
cilindrice este un sistem de referin mobil, fiind legat de micarea punctului material. Drept urmare, n Fig. 3, se ia n studiu un punct material M aflat n micare pe o traiectorie curbilinie spaial ( )1 n conformitate cu funcia vectorial ( )1 1r r t= .
Proiecia punctului material 1M n planul 0 0z = este notat cu M . La rndul su, punctul
material M astfel obinut se deplaseaz pe o traiectorie curbilinie plan ( ) , micarea fiind definit prin coordonatele polare independente: r numit raza polar si unghiul polar (vezi Fig.3 a sau b).
Notnd cu versorul ce exprim orientarea razei polare, ecuaia vectorial a traiectoriei de micare pentru punctul 1M , respectiv pentru proiecia acestuia M , n planul 0 0z = , devine:
( ) ( ) ( ) ( )1r t r t t z t k= + (31)
respectiv ( ) ( ) ( ) ( ) , 0r t r t t z t k pentru z= + = (32) Ecuaiile parametrice de micare n coordonate cilindrice, respectiv n coordonate polare, devin:
( ) ( ) ( ); ;r r t t z z t = = = (33) respectiv ( ) ( );r r t t = = (34) Eliminnd parametrul timp, din ecuaia parametric (34), se obine ecuaia traiectoriei punctului material M n coordonate polare.
Studiul cinematic al micrii punctului material 1M si al proieciei acestuia n planul 0 0z = se extinde asupra vectorului vitez liniar si acceleraie liniar. Acest studiu solicit, mai nti stabilirea axelor sistemului de coordonate cilindrice (polar), conform Fig. 3.b.
0O
R
( )0; =tM0x
0y
R
M
Ra
Na
NvRv
Mva
r
( )0; =trn
N
( )M b. Fig. 3
a.
1M
1r
0x
0z
( )1
0y
ri
j
k
z
( )
0O
-
-72-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
innd seama de ecuaia vectorial a traiectoriei de micare (31), una dintre cele trei axe ale sistemului de coordonate cilindrice este axa 0 0O z , de orientare k . Celelalte dou axe sunt situate n planul 0 0z = si se stabilesc n consonan cu independena ntre coordonatele polare ( )r t si ( )t . Mai nti, se consider funcia de timp ( )r r t= , iar unghiul polar se menine constant. Astfel, punctul material descrie o traiectorie relativ, rectilinie, reprezentat prin axa radial 0O R , a crei orientare este definit prin versorul , care constituie una din direciile de proiectare (ax radial).
n a doua etap, raza polar rmne constant, n timp ce unghiul polar devine funcie de timp, adic: ( )t = . n acest caz, punctul M descrie arcul de cerc de raz r . Paralela dus prin punctul
0O la tangenta dus prin punctul M la arcul de cerc de raza r , reprezint axa 0O N (axa transversal). Orientarea acestei axe este dat de versorul n , al crui sens pozitiv corespunde creterii unghiului polar . Aadar, sistemul de coordonate polare cuprinde axele de versori si n , iar sistemul de coordonate cilindrice cuprinde axele a cror orientare este dat prin versorii , n si k , cu respectarea condiiei k n= . Particularitile cinematice, care stau la baza sistemului de coordonate cilindrice reliefeaz faptul c acest sistem de referin, simbolizat prin { }S , este mobil si efectueaz simultan cu micarea punctului material M o rotaie cu unghiul polar ( )t = n jurul axei de versor k . Drept urmare, versorii axelor de coordonate polare devin funcii de timp, adic: ( ) ( ),t t = = . (35) Rotaia cu unghiul este evideniat prin matricea de rotaie:
( )( ) ( )( ) ( )
0, 0
0 0 1
c t s tR z t s t c t
= . (36)
Apelnd ecuaia matriceala de transfer, particularizat pentru sistemul de coordonate cilindrice, componentele versorilor si n pe axele sistemului de referin cartezian { }0 , devin: ( ), SR z = , ( ), Sn R z n= (37)
( )( ) ( )( ) ( )
( )( )
( )( ) ( )( ) ( )
( )( )
0 10 0
0 0 1 0 0
0 00 1
0 0 1 0 0
c t s t c tt s t c t s t
c t s t s tn t s t c t c t
= = = =
, (38)
Asupra ecuaiei (38) se aplic derivata absolut de ordinul nti n raport cu timpul, rezultnd:
,0 0
s cc n n s
= = = =
&& & & & & . (39)
-
-73-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Viteza liniar a punctului material 1M n coordonate cilindrice se obine prin aplicarea derivatei absolute n raport cu timpul asupra ecuaiei vectoriale (31). Astfel, se obine: 1v r r r z k = = + + & && & . (40) Substituind & cu (39) n (40), rezult: v r r n z k = + + & && . (41) Din (41) se deduc pe de o parte componentele vitezei n coordonate polare, iar pe de alt parte, componentele vitezei punctului material 1M n coordonate cilindrice:
, ,R N Zv r v r v z= = =& && . (42) innd seama de (42), modulul vectorului vitez liniar se determin cu expresia:
2 2 2 .R N Zv v v v= + + (43) Acceleraia liniar a punctului material 1M n coordonate cilindrice se obine prin aplicarea derivatei absolute de ordinul nti n raport cu timpul asupra vectorului vitez, definit cu (41), adic: 1a v r r r r n r n r n z k = = = + + + + + && && &&& & & &&& && & (44) Substituind (39) n (44), si ordonnd dup versorii ce caracterizeaz sistemul de coordonate cilindrice, expresia vectorului acceleraie liniara devine: ( ) ( )2 2a r r r r n z k = + + + && & &&& & && (45) Din (44) se deduc pe de o parte componentele polare ale acceleraiei punctului M , iar pe de alt parte componentele cilindrice ale acceleraiei punctului 1M , conform cu:
2 , 2 ,R N za r r a r r a z = = + =&& & &&& & && (46) Lund n considerare expresia (46), modulul acceleraiei punctului 1M se stabilete cu relaia:
2 2 2R N Za a a a= + + (47) Observaii: Componentele vitezei i acceleraiei punctului 1M n coordonate cilindrice (42) i (46) se pot obine utiliznd ca ecuaie de plecare, sub form matriceal, urmtoarea:
( )( )( )( )
( )( )
( )
1
1 1
1
; 0 ;x t r t
r t y t R zz t z t
= =
(48)
1
1
1
00 0 ;
0 0 1
x c s ry s cz z
= (49)
Din relaia (49), se obin ecuaiile parametrice de micare ale punctului M n coordonate carteziene: ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 1; ;x t r t c t y t r t s t z t z t = = = (50) Asupra relaiilor anterioare, se aplic derivata absolut de ordinul nti i doi n raport cu timpul:
1
1
1
x r c r sy r s r c
z z
= = + =
&& &&& &
& &;
21
21
1
22
x r c r s r s r cy r s r c r c r s
z z
= = + + =
&& & &&& & && &&& & &&& & && &
&& && (51)
-
-74-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
innd seama de sistemul de coordonate cilindrice, rezult expresiile:
( )( )
TR N Z R N Z
TR N Z R N Z
v v v n v k v v va a a n a k a a a
= + + == + + = (52)
Aplicnd ecuaia matriceal de transfer, se obin urmtoarele expresii:
( )1
1 1
1
0; 0
0 0 1
RT
N
Z
v c s xv v R z r s c y
v z
= = =
&& &
&
( )1
1 1
1
0; 0
0 0 1
RT
N
Z
a c s xa a R z r s c y
a z
= = =
&&&& &&
&&, (53)
Substituind (51) n (53), prin dezvoltarea produsului matriceal din membrul drept se obin expresiile (42) respectiv (46), caracteriznd componentele vitezei si acceleraiei n coordonate cilindrice.
5.1.3 Componentele vitezei i acceleraiei n coordonate intrinseci Dac traiectoria de micare a punctului material este cunoscut, atunci studiul cinematic se
poate efectua n sistemul de coordonate intrinseci, aa cum arat att din Fig. 1, ct i o dezvoltare a acesteia n Fig. 4, pe intervalul finit de timp (0, ]t , punctul material descrie arcul de curb, cunoscut prin ecuaia orar a (6), adic: ( )s s t= .
Sistemul de referin utilizat n acest studiu este cunoscut sub denumirea de triedrul mobil al lui Frenet, care este un sistem triortogonal i drept orientat, mobilitatea lui rezultnd prin aceea c originea corespunde cu punctul material aflat n micare. Cele trei axe ale triedrului sunt simbolizate n ordinea , i , avnd urmtoarele caracteristici: axa de versor este orientat dup tangenta unic la curb n punctul M , al crei sens orientat pozitiv corespunde cu sensul de micare, adic cu sensul creterii arcului de curb ( )s s t= ; axa de versor , reprezint normala principal, orientarea acesteia fiind de la punctul material spre centrul de curbur; a treia ax este binormala, iar versorul acesteia , este rezultatul produsului vectorial = .
Planul format de axele si poart denumirea de plan osculator. In conformitate cu expresiile de definiie ale vitezei liniare (14) si acceleraiei liniare (21) i (22), componentele vectorului viteza i acceleraia liniara, pe axele triedrului mobil al lui Frenet se scriu astfel:
2, 0, 0;
, , 0 .
v s v vsa s a a
= = == = =
&&&& (54)
Observaie: Componentele vitezei si acceleraiei n coordonate intrinseci obinute prin expresiile anterioare, sunt utile n studiul calitativ al micrii mecanice a punctului material M luat n studiu.
Fig. 4
s
O
a
a
a
M
( )
v
OM
R
-
-75-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Capitolul 6. Micarea general a solidului rigid n Fig.1 se ia n studiu un corp rigid ( )S , cu o form geometric oarecare, a crui micare se
studiaz cu ajutorul a dou sisteme de referin: un sistem de referin fix { }0 i respectiv un sistem de referin mobil{ }S , invariabil legat de rigidul ( )S ntr-un punct arbitrar ales O , aparinnd acestuia. Cu originea n acelai punct O , este fixat sistemul { }0 a crui orientare este constant pe toat durata micrii i identic cu a sistemului de referin fix { }0 , adic { } { }0 0 .
Studiul geometric. Ecuaiile parametrice de micare Dac asupra corpului rigid ( )S nu se aplic nicio restricie fizic i geometric, atunci poziia i orientarea n raport cu sistemul de referin fix { }0 , este definit, n mod univoc, prin ase parametri independeni, reprezentnd gradele de libertate ale corpului rigid. Rigidul fiind n micare, cei ase parametri independeni devin funcii de timp, adic:
( )( )
( ) ( ) ( )( ) ( ) ( )
0 0 0 0T
Tx y z
r t x t y t z tX
t t t t = =
(55)
Primele trei ecuaii din (55) caracterizeaz poziia sistemului de referin { }S la momentul ( )t i reprezint ecuaiile parametrice de micare ale originii 0O O , adic: ( ) ( ) ( ) ( )0 0 0 0 0 Tr r t x t y t z t= = (56) Totodat, ecuaiile (56) exprim micarea de translaie rezultant a corpului ( )S . Ultimele trei ecuaii din (55), se rescriu sub forma urmtoare: ( ) ( ) ( ) ( ) Tx y zt t t t = = (57)
Fig. 1
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-76-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Aceste ecuaii exprim, orientarea rezultant a corpului ( )S , sau a sistemului de referin mobil { }S la momentul ( )t fa de sistemul de referin fix. n acelai timp, vectorul de orientare (57) exprim micarea de rotaie rezultant a corpului rigid, rotaie modelat matematic prin cele trei unghiuri, incluse n matricea de rotaie rezultant rescris sub forma urmtoare:
1 0 0 0 0( ) 0 0 1 0 0
0 0 0 0 1
y y z z
x y z x x z z
x x y y
y z y z y
x y z x z x y z x z x y
x y z x z x y z x
c s c sR c s s c
s c s c
c c c s ss s c c s s s s c c s cc s c s s c s s s
= =
= + + + + z x yc c c
(58)
Aadar, atunci cnd rigidul posed ase grade de libertate, acesta execut o micare general, ale crui ecuaii parametrice sunt definite prin expresiile (55)-(57). Ecuaia vectorial a traiectoriei de micare a unui punct M aparinnd corpului rigid ( )S care respect condiia 0M , este: ( ) ( ) ( ) ( ) ( )( )00 , SsMr t r t r t iar r t R t r= + = (59) unde .S r cst= este vectorul de poziie al punctului M cu proiecii pe sistemul { }S .
Dac restriciile geometrice i fizice aplicate corpului rigid impun ca pe toat durata micrii acestuia sistemul{ }S s pstreze orientarea identic cu a sistemului { }0 , adic: { } { }0OR ORS , atunci unghiurile de orientare primesc valorile particulare:{ }0; 0; 0 = = = . Ca urmare matricea de rotaie rezultant se transform n matricea unitate, dup cum urmeaz:
( ) ( )0 31 0 00 1 00 0 1
T T T T
T T T Ts
T T T T
i i i i j i kR j i j k j i j j j k I
k k i k j k k
= = = (60)
n aceste condiii restrictive, ecuaiile parametrice de micare ale rigidului ( )S devin echivalente cu relaiile (56), adic rigidul posed trei grade de libertate, reprezentnd translaii simple n lungul axelor sistemului de referin { }0 . Acest tip de micare particular, este cunoscut sub denumirea de micare de translaie rezultant. Ecuaia vectorial a traiectoriei de micare a punctului M , a corpului ( )S este: ( ) ( )0 , : .Mr t r t r unde r cst= + = (61) Se observ c n acest caz traiectoriile tuturor punctelor rigidului ( )S sunt curbe paralele, translaia geometric dintre ele fiind dat prin .r cst= Ecuaia vectorial a traiectoriei de micare a punctului M , se particularizeaz:
( ) [ ]( )0 SsMr t R t r= (62)
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-77-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
CURSUL 12 28.05.2014
Noiunea de vitez i acceleraie unghiular Pentru nceput, n Fig.2, se ia n studiu un punct material M, aflat n micare pe o traiectorie
circular de raz OM , cu centrul n punctul O i situat n planul 0 0z z O M c cst= = = , unde cst = este unghiul dintre raza vectoare 0O M i axa micrii de rotaie. La momentul iniial, mobilul se
afl n poziia 0 ,M definit prin vectorul ( )0 0r t = . La momentul ( )t , punctul se afl n poziia M, caracterizat prin
( )0O M r t= , iar la momentul ( )t t+ n poziia 1M , avnd raza vectoare ( )r t t r r+ = + , unde t este un timp elementar, finit dar foarte mic. n intervalul finit de timp
( ]0, t , raza polar, notat prin 0OM OM r s= = , descrie unghiul la centru ( )t = , iar punctul material M descrie arcul de cerc 0M M s OM = = . n intervalul de timp ( ),t t t+ , raza polar descrie la centru unghiul elementar ( ) , iar mobilul descrie arcul elementar s . n studiu, se consider de asemenea, un sistem de referin mobil { }S , la care axa Ox este legat de punctul M , iar axa Oz este coliniar cu 0Oz . Ca urmare, sistemul { }S legat de mobilul M , execut o rotaie n jurul acestei axe, , rescris mai jos:
( )[ ]( ) ( )( ) ( )
0
, 00 0 1
c t s t
R z t s t c t
=
Proiecia vectorului OM pe sistemul { }0 se exprim prin: ( , ) SOM R z OM= , (63) unde ( ) ( )0 00 0 , 0 0S T TOM r s O O z= = . (64) Substituind, (63) i (64) n (59), se obin ecuaiile parametrice:
0
000 0 0
0 0 1 0
c s r sxr y s c
z z
= = + (65)
Dezvoltnd expresia matriceal anterioar, rezult ecuaiile parametrice de micare ale mobilului M , n coordonate carteziene, adic:
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
x
y
OM
1M
r
O R
N Mr
R
M
k
0x
x
y
0z z
O
( )tr
OO
0M
1M
s s( )0=tr ( )ttr +
0y
Fig. 2
-
-78-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
0; ; .x r s c y r s s z z cst = = = = (66) Observaie: Expresia (66), arat c legea de micare a mobilului M pe o traiectorie circular este dat prin ( )t = , reprezentnd variaia n raport cu timpul a unghiului polar. Sub aspect cinematic, micarea este caracterizat prin viteza i acceleraia unghiular, a cror semnificaie se va arta n continuare. Mai nti, se definete viteza unghiular medie m pe intervalul de timp ( , ]t t t+ , adic: m
t t tt t t
( ) ( ) + + = = = . (67) Aadar, unghiular medie m reprezint unghiul elementar descris de raza polar n intervalul de timp t . innd seama de semnificaia operatorului , viteza unghiular medie este o valoare aproximativ. Valoarea exact a vitezei unghiulare , instantanee momentului ( )t , se obine prin trecerea la limit n relaia (67):
0
limt
dt dt
= = = & , (68) unde reprezint derivata absolut de ordinul nti n raport cu timpul a funciei ( )t = , sau unghiul la centru mturat de raza vectoare n unitatea de timp.
Pentru a evidenia caracterul vectorial al vitezei unghiulare, din Fig.8.3 se consider triunghiul elementar 1OMM , n care r s . Aadar, coarda vectorial r este egal n aproximaia liniar cu arcul elementar ( )s . Drept urmare, se scrie urmtoarea relaie: 2
2r OM s = , unde 0OM O M s r s = = . (69)
Funcia trigonometric de argument elementar din (69), se dezvolt n serie Taylor dup cum urmeaz:
3 51 1sin ...........
2 2 3! 2 5! 2 = + (70)
n aproximaia liniar, rezult sin2 2 , astfel c expresia (69) devine:
r r s = . (71) Relaia anterioar, se divizeaz cu t i se trece la limit. Aadar, rezult:
0 0lim limt
rr s
t t
= . (72) innd seama c viteza particulei M din Fig.8.3 este v r= & pe de o parte, lund n considerare (68), relaia (72) devine echivalent cu: v r s = . (73) Relaia (73) caracterizeaz modulul vitezei liniare, care conform cu (7.14) este o mrime vectorial. Drept urmare, pentru tipul de micare analizat, n acest paragraf, vectorul viteza liniar rezult prin transformarea vectorial aplicata asupra expresiei (73), adic: ( )v r= . (74)
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-79-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Expresia (74) caracterizeaz viteza de rotaie i demonstreaz c viteza unghiular este o mrime vectorial care nchide cu vectorul de poziie unghiul .cst = ,fiind astfel orientat dup axa de rotaie, care n acest caz, aceasta este axa Oz .
n cele ce urmeaz, se determin matricea antisimetric asociat vectorului vitez unghiular. n acest sens, vectorii ce compun (74), se exprim prin componentele carteziene conform relaiilor:
x y z
x y z
x y z
v v i v j v ki j k
r r i r j r k = + + = + + = + +
(75)
Din capitolul nti, se utilizeaz urmtoarele notaii: { }, ,u x y z= i respectiv { }, ,u i j k= , unde u reprezint una dintre axele sistemului de referin cartezian a crei orientare este caracterizat prin versorul u . Prin similitudine cu studiul momentului axial se definesc proieciile vectorului vitez unghiular pe axele de versor u , conform cu:
( ) ( )Tuv r u r u = = innd seama de (75), expresia anterioar se rescrie astfel:
x
Ty
z
i i j i k ivv v i j x j j y k j z
i k j k k kv
= = + + (76)
Dar, expresia (76) este echivalent matematic cu:
x
Ty
z
i i j i k iv xv v i j j j k j y
zi k j k k kv
= = (77)
innd seama de proprietile versorilor unui sistem de referin drept orientat, produsele vectoriale din (77), devin:
0; ; ; ,i i j j k k i j j i k j k k j i k i i k j = = = = = = = = = Ca urmare, expresia (77) se rescrie astfel:
00
0
T T
T T
T T
k j xv k i y
zj i
= (78)
n conformitate cu (75), componentele matricei din (78) sunt: ; ; .T T Tx y zi j k = = =
Ca urmare, expresia (78), ia forma:
0
00
z y
z xy x
xv y r
z
= = (79)
Prin identificare n expresia (79), rezult:
( )0
00
z y
z xy x
=
(80)
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-80-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Matricea de dimensiuni ( )3 3 , exprimat prin (80), reprezint matricea antisimetric asociat vectorului vitez unghiular . n cazul micrii din Fig.2, axa de rotaie este Oz , astfel vectorul este: ( )0 0 Tk = =& & . (81) innd seama de matricea antisimetric asociat vectorului , notat cu ( ) i definit cu (80), expresia (81) ia forma particular:
( ) ( )0 0 0 1 00 0 1 0 00 0 0 0 0 0
k
= = =
&& & & (82)
unde ( )k este matricea antisimetric asociat versorului k , care exprim orientarea axei de rotaie. Al doilea parametru cinematic, caracteristic micrii circulare este rezultatul variaiei n raport cu timpul a vectorului vitez unghiular. Acest parametru poart denumirea de acceleraie unghiular, i se exprim prin:
0
limt
d k kt dt
= = = = + && && & (83)
ntruct versorul k cst= , vectorul acceleraie unghiular este echivalent cu: k = && (84) Aadar, n cazul micrii circulare a unui punct material, vectorul acceleraie unghiular , este coliniar cu vectorul vitez unghiular , ambii vectori fiind orientai dup axa de rotaie Oz .
Proprietatea derivatei n raport cu timpul a matricei de rotaie n conformitate cu Fig.2, ecuaia vectorial a traiectoriei de micare absolut a punctului M se
scrie sub forma: ( ) ( ) ( )[ ]0 0 ; ,S Sr t O O OM t O O R z t OM unde OM cst= + = + = . (85) Asupra expresiei (85) se aplic derivata absolut de ordinul nti n raport cu timpul:
( ) ( )[ ]. ; Sr t OM R z t OM= = & & . (86) n (86) se introduce proprietatea, conform creia ( ) ( ) 3; ;TR z R z I , unde ( );TR z este transpusa matricei de rotaie, n conformitate cu 4.2, iar 3I reprezint matricea unitate. Astfel, expresia (86) devine echivalent cu: ( ) ( ) ( ) ( ) ( ) ( ); ; ; ; ;ST Tr t R z R z R z OM R z R z OM = = & & & (87) innd seama de (74) i (85), expresia vectorial a vitezei liniare se rescrie: ( )0 0v r r O O OM O O OM OM = = = + = + = & , (88) unde 0 0O O = . Expresiile (87) i (88) sunt identice i exprim viteza liniar a punctului M . Prin identificare, se obine o proprietate fundamental privind derivata n raport cu timpul a matricei de rotaie, demonstrat i n lucrri precum [N01] i [C01]: ( ) ( ) ( ); ;TR z R z = & , (89)
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-81-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Conform proprietii (89), matricea antisimetric asociat vectorului vitez unghiular reprezint produsul matriceal dintre derivata n raport cu timpul a matricei de rotaie i transpusa acesteia. Dezvoltnd expresia din membrul drept al ecuaiei (89), rezult:
( ) ( )0 0 0 1 00 0 1 0 0
0 0 0 0 0 1 0 0 0
s c c sc s s c k
= = =
& & & (90)
o expresie identic cu (82) i exprim matricea antisimetric asociat vectorului vitez unghiular . innd seama de (82) i (89), se scrie urmtoarea identitate matriceal: ( ) ( ) ( ) ( ) ( ); ; ; ;T TR k R k R k R k k = & & & (91)
Distribuia de viteze n micarea general Pentru determinarea legii de distribuie a vitezelor (59), rescris mai jos:
( ) ( ) ( ) ( ) [ ]( )00 0 SM Sr t r t r t r t R t r= + = + Asupra expresiei (59), se aplic derivata absolut de ordinul nti n raport cu timpul, rezultnd urmtoarea expresie vectorial:
[ ] [ ] [ ] [ ]0 0 0 00 0 0 TS SSM S S Sr r r r R r r R R R r= + = + = + & & & & && & (92) n care M Mr v=& reprezint viteza punctului M , iar 0 0r v=& viteza punctului O , ambele fiind n raport cu sistemul fix { }0 . Astfel, expresia (92) ia forma final:
0Mv v r= + (93) i reprezint legea distribuiei vitezelor, cunoscut sub numele de formula lui Euler pentru viteze, n micarea general a solidului rigid. n (93), vectorul reprezint viteza unghiular instantanee. Observaii: Ecuaia vectorial (93) se poate scrie sub forma matriceal:
0
00
z yOxxy Oy z x
y xz Oz
vv xv v y
zv v
= + ; (94)
pe baza creia se obin proieciile vitezei liniare ale punctului M pe axele sistemului fix { }0 , dup cum urmeaz:
x Ox y z
y Oy z x
z Oz x y
v v z yv v x zv v y x
= + = + = + (95)
n studiul cinematic, prezint interes i derivata absolut de ordinul nti n raport cu timpul ale versorilor sistemului de referin mobil. n acest scop, se consider versorul { }; ;u i j k= , ce exprim orientarea unei axe a sistemului de referina mobil { }S n raport cu sistemul de referin fix, precum i versorul { }; ;S S S Su i j k= , ce exprim orientarea unei axe mobile n sistemul propriu. Cunoscnd matricea de orientare [ ]0S R (vezi (58)) urmtoarea relaie este evident, conform cu (4.19), adic: ( ) [ ]( )0 SSu t R t u= (96) Aplicnd derivata de ordinul nti asupra expresiei (96) i innd seama de proprietate, rezult:
-
-82-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
[ ] [ ] [ ]0 0 0T SS S Su R R R u u= = && (97) Substituind versorul { }, ,u i j k= n (97) se obin formulele lui Poisson, astfel: i =& i ; j =& j ; k =& k (98) Ecuaia (93) se aplic pentru un alt punct al corpului ( )S , spre exemplu: N O i N M , rezultnd: 0Nv v ON= + (99) Expresiile (93) i (99), arat c viteza liniar variaz, conform acestei legi, de la un punct la altul al corpului rigid ( )S , spre deosebire de viteza unghiular, care este invariant (constant) pentru , infinitatea de puncte componente ale corpului ( )S .
Distribuia de acceleraii n micarea general Pentru a stabili legea distribuiei acceleraiilor n micarea general, asupra expresiei (93) se
aplic derivata absolut de ordinul nti, rezultnd: 0M Ma v v r r = = + + && & & , (100) Termenii din expresia (100) au urmtoarele semnificaii: 0 0v a=& reprezint acceleraia punctului O (vezi Fig. 1), =& este acceleraia unghiular instantanee, iar conform cu (92), r r= & . Substituind aceste semnificaii matematice n membrul drept al relaiei (100) se obine: ( )0Ma a r r = + + (101) adic legea distribuiei acceleraiei, expresie cunoscut sub denumirea de formula lui Rivals pentru acceleraii n micarea general a solidului rigid. Ecuaia (101) se rescrie sub urmtoarea form matriceal:
20 00 0
0 0
z y z yOxxy Oy z x z x
y x y xz Oz
aa x xa a y y
z za a
= + + (102)
din care se obin proieciile acceleraiei liniare pe axele sistemului fix, sub forma:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
2 2
2 2
2 2
x Ox y z x y z x z y
y Oy y x z z x y z x
z Oz z x y z y x x y
a a x y z
a a x y z
a a x y z
= + + + + = + + + + = + + + + (103)
Observaii: Conform expresiei de definiie (101), acceleraia unui punct aparinnd corpului rigid, aflat ntr-o micare general are trei componente i anume: 0a , corespunztoare micrii de translaie a sistemului de referin mobil, respectiv acceleraie de rotaie r i acceleraie axipet ( )r fiind corespunztoare micrii de rotaie rezultant.
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-83-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
I. Aplicaii Cinematica punctului material 1.Se consider un punct material M , care se mic pe suprafaa unei sfere de raz R (vezi Fig.1), cu viteza constant v , care face cu meridianul un unghi constant. Se cere determinarea traiectoriei punctului M .
Rezolvare: Avnd n vedere faptul c punctul material se deplaseaz pe un meridian, atunci azimutul este constant, adic .cst = Ecuaiile de plecare sunt expresiile de definire ale poziiei punctului M pe axele sistemului Oxyz reprezentate n (53), care se deriveaz n raport cu unghiul . Aadar rezult:
x R s sy R s c c
= =
& && &
(104)Vectorul vitez v are dou componente, una dirijat dup meridian, iar cealalt dup paralela din punctul M , echivalente cu:
{ }2 2 ;v c x y R s v s R = + = = && & & ; (105)Fcnd raportul ntre ce dou componente ale vitezei, se obine:
v s Rv c R s
= &
& , astfel se obine:dtg
d s = ; (106)
Prin integrarea expresiei (106), rezult:
0
dtg d Cs
= + ; (107) n configuraia iniial { }0, 0, 0t = = = , deci constanta de integrare este 0C = , astfel c expresia anterioar devine:
dtgs = . (108)
Considernd c: ( )( ) ( ) ( ) ( )2 22
2 2 2 2 22
ss c c tg
c = = , care substituit n expresia (108), conduce la:
( ) ( )( )( ) ( )2
21 ln 22 2 2 2
d tgdtg tgc tg tg
= = = ; (109)
de unde: ( )2 tgtg e = ; (110) Aadar, traiectoria punctului M este o curb numit loxodromie. Proiecia loxodromei pe planul ecuatorial este o spiral pentru care centrul O al sferei este un punct asimptotic.
M
x
y
z
O
v
rR
v s
v c
Fig.1
-
-84-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
2. n Fig. 2 se consider un mecanism biel-manivel-cap de cruce. Manivela OA r= se rotete n jurul punctului fix O cu viteza unghiular constant . Lungimea bielei AB este egal cu ( )2 c . Se cere s se determine ecuaia traiectoriei punctului C.
Rezolvare: Conform cu Fig.2, coordonatele punctului C se determin astfel: x r c c c = + , y c s= . (111) innd seama de aceeai Fig. 2ntre unghiurile i exist urmtoarea relaie : 2r s c s = ; (112) Ecuaia traiectoriei se obine prin eliminarea unghiurilor i din expresiile (111) i nlocuindu-le n (112). Astfel, se obin urmtoarele relaii:
2 2c ys s
r r = = ; 2 2 211 4c s r y
r = = ; (113)
innd seama de a doua expresie din (111), se poate scrie expresia:
2 21c c yc
= ; (114) Se introduc c i c n prima ecuaie din (111) i se obine: ( ) ( )22 2 2 2 2 2 23 0y x c y x y c r + + = . (115) expresia ce caracterizeaz ecuaia traiectoriei punctului C.
O
x
yc
c
x
y
A
r
B
C
D
Fig. 2
-
-85-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
3. n Fig. 3 se consider o bar al crei capt A alunec pe o dreapt fix cu vitez constant 0v i trece printr-un manon care se rotete n jurul articulaiei B . Se cere s se determine ecuaiile parametrice de micare i traiectoria punctului M, viteza i acceleraia punctului M aparinnd bare,i cunoscnd faptul c AM OB c= = .
Rezolvare: Din figura alturat se pot deduce urmtoarele relaii trigonometrice:
ysc
= ; 2 2 211c s c yc
= = ; (116) De asemenea, se pot scrie urmtoarele relaii:
2 2
0 21 c yv t c c
tg y = = iar
0
ctgv t
= ; (117) Astfel, se pot determina ecuaiile parametrice ale micrii punctului M i anume:
0 ,x v t c c y c s = = . (118) nlocuind n (118) s i c n funcie de tg se vor obine expresiile finale, n forma:
20
0 02 2 2 2 2 2 20 0
,1
c v tc cx v t v t ytg c v t c v t
= = =+ + + . (119)
Ecuaia traiectoriei de micare a punctului M se obine eliminnd parametrul timp ntre cele dou ecuaii parametrice (119).
Pentru a determina viteza punctului M se deriveaz n raport cu timpul,o dat, ecuaiile sistemului (119). Se obin, astfel, componentele vitezei punctului M proiectate pe axele sistemului de referin xOy .
( ) ( )3 2
0 00 3 3
2 2 2 2 2 22 20 0
,c v c v tx v yc v t c v t
= = + +
& & ; (120)
Dar 2 22v x y= +& & de unde rezult 3 40 1 2v v s s = + . (121) unde
2 2 20
csc v t
= + . Acceleraia punctului M proiectat pe cele dou axe ale sistemului de referina se obin prin derivarea n raport cu timpul a componentelor vitezei(120).
y
cc
B
r
x0v t
OA
M
0v
Fig. 3
-
-86-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
4.S se studieze micarea unui punct material M , determinndu-se traiectoria, viteza i acceleraia dac legea
de micare a punctului este ( )( )0
a c tr b s t
= n care parametrii ,a b i sunt constante pozitive.
Rezolvare: innd seama de legea de micare a punctului M din datele problemei, ecuaiile parametrice ce caracterizeaz micarea punctului M sunt:
( ) ( );x a c t y b s t = = ; (122) Pentru a obine ecuaia traiectoriei punctului M mai nti se ridic la ptrat fiecare ecuaie din (122):
, ( )( )
2 2 2
2 2 2
;.
x a c t
y b s t
= = (123)
Prima expresie din (123) se mparte cu 2a , iar a doua cu 2b , dup care se nsumeaz cele dou relaii, rezultnd:
2 2
2 2 1x ya b
+ = . (124) Astfel, rezult traiectoria mobilului M pe o elipsa de semiaxe a i b aa cum rezult din Fig.4. Se cunoate faptul c viteza punctului M este tangent la traiectoria descris, ea putnd fi exprimat ca derivata n raport cu timpul a vectorului de poziie r , astfel:
( )( )
0 0
x a c tr y a s t
= = ; de unde rezult:
( )( )
0 0
x a s tv r y b c t
= = =
&& & . (125)
Modulul vitezei punctului M , lund n considerare relaia (125) poate fi exprimat astfel:
( ) ( )2 2 2 2 2 2v x y a s t b c t = + = + & & ; (126) Acceleraia punctului M rezult aplicnd derivata n raport cu timpul vectorului vitez:
( )( )2
0 0
x a c ta v r y b s t
= = = =
&&&&& && . (127)
Modulul acceleraiei ce caracterizeaz micarea punctului M pe elipsa (2) este:
( ) ( )2 2 2 2 2 2 2a x y a c t b s t = + = + && && . (128)
x
y
a
b rM
O A
v
Fig. 4
-
-87-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
5.n Fig. 5, bara cotit ABC se mic n planul xOy, astfel c punctul A, captul barei, are viteza constant .Av const= pe direcia Ox. Poriunea BC, n tot timpul micrii trece prin punctul fix D. Se cere s se determine
legea de variaie a unghiului , dac la 0t = , 0Ax = .
Rezolvare: Din Fig. 5 se observ c la momentul iniial ( )0t = , viteza punctului A este 0Av = . De asemenea, punctul A execut o micare rectilinie uniform, ceea ce nseamn c:
.A Ax v cst= =& (129) Se integreaz ecuaia (129), rezultnd ecuaia de micare a punctului A ,sub forma:
1A Ax v t C= + ; (130) Constanta de integrare 1C se determin aplicnd asupra ecuaiei (130),condiiile iniiale { }0; 0At v= = ; astfel, rezult c 1 0C = .
( )21 ;
.
A
A A
cx c tg c tg tgc
x v t
= + = + + =
(131)
Pe baza ecuaiei (131), unghiul se determin dup cum urmeaz: ( ) 21Av t c tg c tg = + ; (132) Efectund transformrile necesare n ecuaia (132), rezult urmtoarea expresie:
2 2
A
A
v t ctgc v t
= . (133) Se poate observa c valoarea unghiului variaz n timp conform legii: ( )t =
O
y
x A
C
B
D c
c
Av
Fig. 5
-
-88-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
6.O bar AB se mic astfel nct captul A alunec pe orizontal, iar corpul barei trece n permanen prin punctul fix C. S se determine ecuaiile traiectoriilor punctelor 1M i 2M AB tiind c 1AM c= i 2 2AM c= . Rezolvare:
Ecuaiile parametrice ale bazei se determin astfel:
( )
1
21
;1 .
x c tg
y c tg
= = + (134)
Eliminnd tg ntre 1x i 1y din sistemul (134), rezult ecuaia cartezian a bazei:
( )21 1x c y c= ; (135) Se observa c ecuaia cartezian a bazei descrie o parabol. Ecuaiile parametrice ale rostogolitoarei sunt:
1
2
2 2 2 2 21
s ;c
.
xx cc
cy x AM c tg cc
= = = + = + = (136)
La fel ca i n cazul anterior se determin ecuaia cartezian a bazei, astfel:
2 2
2 21c c yc x cy y c
= = + ; (137)
( )2 42 2 4 2 2 22 41 c yx c y x y cy c = + = + . (138)
n continuare se determin ecuaiile parametrice ale punctului 1M , astfel:
( )
1
1
1 ;.
M
M
x x c s c tg sy c c
= = = (139)
Din cea de-a doua ecuaie a sistemului (139) se poate determina 1My
cc
= . Exprimnd tg i s n funcie de c i nlocuind n prima relaie din (139), va rezulta:
1
1
22
1
22
1 1 ;
11 ; ; ;
M
M
cx c cc
ycs c tg cc c
= = = =
(140)
Efectund toate substituiile indicate anterior, va rezulta ecuaia cartezian a punctului 1M :
( ) ( )1 1 1 1 22 2 2 21 1M M M Mx y c y c y = ; (141) Ecuaiile parametrice ale punctului 2M se determin innd seama c::
( )2
2
1 1 2 ;2.
2
M
M
cx x N A tg scy c
= = =
(142)
Pe baza sistemului (142), prin efectuarea unor transformri (vezi (141)), rezult expresia:
( ) ( )2 2 2 22 2 2 24 4M M M Mx y c y c y = . (143) ce reprezint ecuaia cartezian a punctului 2M .
A
C B
M1 M2
c
c/2 c
O
y
x
Fig. 6
-
-89-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Aplicaii - Micrile particulare ale rigidului
7.O dreapt ( )d se rotete n jurul punctului O cu vitez unghiular constant i taie un cerc de raza r ntr-un punct notat cu M (Fig. 7). S se determine viteza i acceleraia punctului M n micarea sa pe cerc i pe dreapt. Rezolvare:
n micarea punctului material pe un cerc, ecuaia vectorial poate fi scris sub forma:
( ) ( )2 2r r s i c j = + (144) Viteza se exprim ca derivata n raport cu timpul a vectorului de poziie:
d rv rdt
= =& (145) Derivnd n raport cu timpul ecuaia vectorial a micrii (144), rezult expresia vitezei:
2v r= (146) Acceleraia e definit ca derivata de ordinul nti a vectorului vitez sau derivata de ordinul doi a vectorului de poziie.
Derivnd de dou ori n raport cu timpul (144), se obine:
( ) ( )2 24 4s 2 2a v r r ri c j = = = = + &&& (147) n micarea punctului material pe o dreapt , ecuaia parametric a micrii este:
2s r c= (148) Viteza punctului material rezult prin derivarea n raport cu timpul a ecuaiei (5):
1 2dsv r sdt
= = (149) Analiznd Fig.7 se deduce urmtoarea expresie pentru deplasarea s i anume:
( )2 2 24 1s r s = (150) n expresia (150) se expliciteaz s n funcie de raza cercului r i deplasarea s , astfel:
x
y
( )M t0 0=M
R
N
O1
r2
2
a1a v1
v
s0
O
( )d
s
Fig. 7
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-90-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
2 21 42
s r sr
= (151) Se nlocuiete relaia (151) n expresia vitezei definit cu (149),rezultnd n final:
2 21 4v r s= (152)
Acceleraia punctului n micarea pe o dreapt se obine efectund derivata de ordinul nti n raport cu timpul a
vitezei, astfel innd seama de (152) rezult:
11 2dva r cdt
= = , dar 2 2 24s r c = de unde rezult: 21a s= (153)
Viteza i acceleraia unui punct, n micare pe un cerc se exprima n coordonate intrinseci respectiv n
coordonate polare, dup cum urmeaz:
= 2 de unde rezult = 0 2s R (154) 0 2 2v s R R = = = & & (155)
0 0a s = =&& ; 2 2 2
20 4 4s Ra RR
= = = & (156)
8. Bara OC se rotete cu viteza unghiular constant n jurul articulaiei cilindrice O i pune n micare bara AB ale crei puncte D i E se deplaseaz n lungul axelor Ox i Oy. tiind c AE=EC=CD=DB=OC=l, s se determine: a. traiectoria, viteza i acceleraia punctului A; b. viteza i acceleraia unghiular instantanee a barei AB; c. centroidele micrii barei AB; d. polul acceleraiilor;
Rezolvare: Pentru determinarea traiectoriei, vitezei respectiv acceleraiei punctului A se scriu legile de micare n raport cu sistemul fix de referine { }0 : 3 cossin
A
A
x ly l
= = ; (157) de unde rezult ridicnd la ptrat i nsumnd cele dou relaii traiectoria de micare al punctului A:
2 2
2 2 19A Ax yl l+ = ; - ecuaia unei elipse
Derivnd legile de micare al punctului A n raport cu timpul se obine proieciile vitezei pe sistemul fix:
23 sin 8 sin 1cosA
AA
x l v ly l
= = + = && (158)
Acceleraia punctului A se determin derivnd proieciile vitezei n raport cu timpul
2
2 22
3 cos 8 cos 1sin
AA
A
x l a ly l
= = + = &&&& (159)
O
A
E
C
D
B0y
0x
yx
CIR
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID
-
-91-
Capitolul 5 CINEMATICA PUNCTULUI MATERIAL
Pentru determinarea vitezei i acceleraiei unghiulare instantanee a barei AB se scrie viteza punctului C, innd seama c bara OC execut micare de rotaie. Datorit faptului c punctul C aparine de bara AB la care se cunoate poziia centrului instantaneu de rotaie (CIR), viteza s-a poate fi scris i n funcie de viteza unghiular instantanee a barei AB. ; ; 0C AB AB AB ABv l l cst = = = = = =& (160) Pentru determinarea polului acceleraiilor se scriu urmtoarele relaii: 2 2A ABa JA JA JA = = ; de asemenea:
22
2 2; ; ;C
Ca la l JC l J O
= = = = (161) Se scriu proieciile vectorului de poziie al centrului instantaneu de rotaie n raport cu sistemul fix pentru determinarea bazei:
0
0 2 0 2 20
2 cos 42 sin
CIRCIR CIR
CIR
x l x y ly l
= + = = - baza (162)
Similar se proiecteaz vectorul de poziie al centrului instantaneu de rotaie n raport cu sistemul mobil xCy pentru determinarea rostogolitoarei:
2 2 2cos2sin2CIR
CIR CIRCIR
x l x y ly l
= + = = - rostogolitoarea (163)
Capitolul 6 MICAREA GENERAL A SOLIDULUI RIGID