CAPITOLO 6 – MOTO DEL SOLIDO - Libero...
42
CAPITOLO 6 – MOTO DEL SOLIDO § 31. Velocità angolare In Meccanica si può definire un corpo solido come un sistema di punti le cui mutue distanze sono invariabili. I sistemi esistenti realmente in natura non possono evidentemente rispondere se non approssimativamente a questa condizione. Ma per la maggior parte dei corpi solidi nelle condi- zioni ordinarie, i cambiamenti di forma e dimensioni sono sufficientemente piccoli perché, quando si studiano le leggi del moto di un solido considerato come un tutto, si possa fare completa astrazio- ne da questi cambiamenti. Nel seguito, noi considereremo sovente il solido come un insieme discreto di punti materiali, ciò che ci permetterà di semplificare di più o di meno i ragionamenti. Tuttavia ciò non è per niente in contraddizione col fatto che si può considerare di solito, in Meccanica, un corpo solido come continuo e ignorare del tutto la sua struttura interna. Il passaggio dalle formule che racchiudono delle sommatorie relative ai punti discreti, alle formule che riguardano il corpo continuo, si effettua semplicemente sostituendo le masse delle particelle con la massa ρdV contenuta in un elemento di volume dV (ρ è la densità di massa), e integrando per tutto il volume del corpo. Per descrivere il moto del solido, utilizzeremo due sistemi di coordinate: un sistema “fisso”, cioè galileiano XYZ, e un sistema di coordinate x 1 = x, x 2 = y, x 3 = z mobile, che si supporrà rigida- mente collegato al corpo solido e partecipe di tutti i moti di quest'ultimo. E' comodo porre l'origine del sistema mobile nel centro d'inerzia del corpo. La posizione di un solido rispetto al sistema fisso è completamente determinata se si dà la posi- zione del sistema mobile. Sia R il raggio vettore che indica la posizione dell'origine O del sistema mobile (Fig. 35). L'orientamento degli assi di quest'ultimo rispetto al sistema fisso è definito da tre angoli indipendenti, in modo che con le tre componenti del vettore R abbiamo in tutto sei coordina- te. Così ciascun corpo solido si presenta come un sistema meccanico a sei gradi di libertà. Consideriamo uno spostamento arbitrario infinitesimo del solido. Lo si può rappresentare come una somma di due termini. Uno è una traslazione parallela infinitesima del corpo, in conseguenza della quale il centro d'inerzia passa da una posizione iniziale ad una posizione finale, senza cambio di orientamento degli assi del sistema mobile. L'altro è una rotazione infinitesima attorno al centro d'inerzia, in conseguenza della quale il solido passa nella sua posizione finale. 1
Transcript of CAPITOLO 6 – MOTO DEL SOLIDO - Libero...
CAPITOLO 6 – MOTO DEL SOLIDO
§ 31. Velocità angolareIn Meccanica si può definire un corpo solido come un sistema di punti le cui mutue distanze
sono invariabili. I sistemi esistenti realmente in natura non possono evidentemente rispondere se non approssimativamente a questa condizione. Ma per la maggior parte dei corpi solidi nelle condi-zioni ordinarie, i cambiamenti di forma e dimensioni sono sufficientemente piccoli perché, quando si studiano le leggi del moto di un solido considerato come un tutto, si possa fare completa astrazio-ne da questi cambiamenti.
Nel seguito, noi considereremo sovente il solido come un insieme discreto di punti materiali, ciò che ci permetterà di semplificare di più o di meno i ragionamenti. Tuttavia ciò non è per niente in contraddizione col fatto che si può considerare di solito, in Meccanica, un corpo solido come continuo e ignorare del tutto la sua struttura interna. Il passaggio dalle formule che racchiudono delle sommatorie relative ai punti discreti, alle formule che riguardano il corpo continuo, si effettua semplicemente sostituendo le masse delle particelle con la massa ρdV contenuta in un elemento di volume dV (ρ è la densità di massa), e integrando per tutto il volume del corpo.
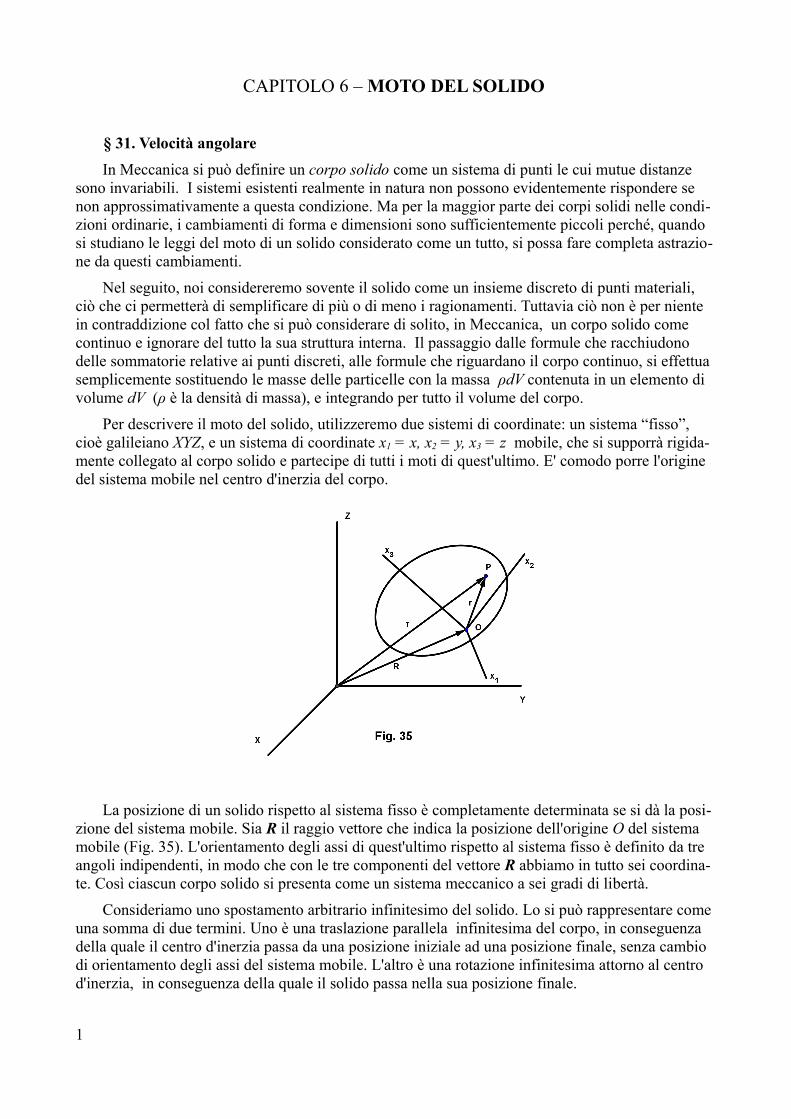
Per descrivere il moto del solido, utilizzeremo due sistemi di coordinate: un sistema “fisso”, cioè galileiano XYZ, e un sistema di coordinate x1 = x, x2 = y, x3 = z mobile, che si supporrà rigida-mente collegato al corpo solido e partecipe di tutti i moti di quest'ultimo. E' comodo porre l'origine del sistema mobile nel centro d'inerzia del corpo.
La posizione di un solido rispetto al sistema fisso è completamente determinata se si dà la posi-zione del sistema mobile. Sia R il raggio vettore che indica la posizione dell'origine O del sistema mobile (Fig. 35). L'orientamento degli assi di quest'ultimo rispetto al sistema fisso è definito da tre angoli indipendenti, in modo che con le tre componenti del vettore R abbiamo in tutto sei coordina-te. Così ciascun corpo solido si presenta come un sistema meccanico a sei gradi di libertà.
Consideriamo uno spostamento arbitrario infinitesimo del solido. Lo si può rappresentare come una somma di due termini. Uno è una traslazione parallela infinitesima del corpo, in conseguenza della quale il centro d'inerzia passa da una posizione iniziale ad una posizione finale, senza cambio di orientamento degli assi del sistema mobile. L'altro è una rotazione infinitesima attorno al centro d'inerzia, in conseguenza della quale il solido passa nella sua posizione finale.
1

Indichiamo con r il raggio vettore di un punto P qualsiasi del solido nel sistema di coordinate mo-bile, e con τ il raggio vettore dello stesso punto nel sistema fisso. Uno spostamento infinitesimo dτ del punto P è allora formato da uno spostamento dR del centro d'inerzia, e da uno spostamento dφ x r rispetto a quest'ultimo per rotazione di un angolo infinitesimo dφ (ved. (9,1)):
d τ = dR + dφ x r .Dividendo questa uguaglianza per il tempo dt impiegato per effettuare lo spostamento considerato, introducendo le velocità
d τ/dt =v , dR/dt = V , dφ /dt = Ω , (31,1)
otteniamo la relazione tra questi ultimiv=V×r . (31,2)
Il vettore V è la velocità del centro d'inerzia del solido; la si chiama velocità del suo movimen-to di traslazione. Il vettore Ω si chiama velocità angolare di rotazione del corpo solido; la sua dire-zione (come pure la direzione di dφ) coincide con quella dell'asse di rotazione. Allora la velocità v di un punto qualsiasi del corpo (rispetto al sistema fisso) si può esprimere in funzione della velocità di traslazione del corpo e della velocità angolare della sua rotazione.
Bisogna sottolineare che le proprietà specifiche dell'origine delle coordinate in quanto centro d'inerzia del corpo non sono state per nulla utilizzate per stabilire la formula (31,2). Il vantaggio di questa scelta apparirà solo più avanti, quando studieremo l'energia del corpo in movimento.
Supponiamo ora che il sistema di coordinate collegato al solido con dei legami rigidi sia scelto in modo che la sua origine si trovi non nel centro d'inerzia O, ma in un punto O' situato ad una di-stanza a dal punto O. Sia V ' la velocità di spostamento dell'origine O' di questo sistema, e Ω' la sua velocità angolare di rotazione.
Consideriamo di nuovo un punto qualunque P del solido e sia r' il suo raggio vettore rispetto all'origine O' . Si ha allora r = r' + a e, introducendo questa relazione nella (31,2)
v=V×a×r ' .
D'altra parte, in base alla definizione di V' e Ω' , si deve avere v=V ' '×r ' . Di conse-guenza: [velocità di spostamento e angolare del nuovo centro]
V '=V×a , '= . (31,3)
La seconda di queste uguaglianze è molto importante. Vediamo che la velocità angolare alla quale ruota in ogni istante il sistema legato al corpo è assolutamente indipendente dal sistema stes-so. Ad un dato istante tutti questi sistemi ruotano attorno ad assi tra loro paralleli con un'unica velo-cità Ω in senso assoluto. Questo fatto ci consente di chiamare Ω velocità angolare di rotazione del solido in quanto tale. La velocità del moto di traslazione non ha questo carattere “assoluto”.
In base alla prima delle (31,3) è chiaro che se V e Ω (ad un dato istante) sono perpendicolari tra loro in un sistema di coordinate di origine O, questi stessi vettori (cioè V ' e Ω' ) saranno pure perpendicolari rispetto ad un'altra origine O' [moltiplicando scalarmente per Ω ambo i membri della (31,3), se V. Ω = 0 , anche V '. Ω = 0, essendo il terzo vettore sicuramente perpendicolare a Ω ]. In base alla (31,2), è chiaro che in questo caso le velocità dei punti del corpo saranno tutte parallele ad uno stesso piano, perpendicolare a Ω . Si può quindi sempre scegliere un'origine O' 1, tale che la sua ve-locità V ' sia nulla, in modo che il moto del solido (ad un istante dato) si presenterà come un moto di rotazione pura attorno ad un asse passante per O'. Questo asse prende il nome di asse di istantanea
1 Essa può essere evidentemente posta all'esterno del corpo.
2

rotazione del corpo1.
Nel seguito sceglieremo sempre l'origine del sistema mobile di coordinate nel centro d'inerzia del corpo, in modo che l'asse di rotazione di esso passi per tale centro. Quando il corpo è in moto, si ha in generale variazione sia del valore assoluto di Ω sia della direzione dell'asse di rotazione.
§ 32. Tensore di inerzia
Per calcolare l'energia cinetica di un solido, consideriamolo come un sistema discreto di punti materiali e scriviamo
T=∑ m v2
2,
dove la sommatoria è effettuata per tutti i punti che compongono il corpo. Sia qui che in seguito ometteremo gli indici che contraddistinguono questi punti, al fine di semplificare la scrittura. [gli in-dici utilizzati si riferiranno alle componenti cartesiane]
Tenuto conto della (31,2), si ha
T=∑ m2V×r 2=∑ m
2V 2∑ mV ×r ∑ m
2×r 2 .
Le velocità V e Ω sono le stesse per tutti i punti del solido. Di conseguenza, nel primo termine, V 2/2 esce dal segno di sommatoria, e la somma Σm è la massa del corpo che indicheremo con μ . Per il secondo termine scriviamo:
∑ mV ×r =∑ m r V×=V×∑ mr .
Di qui è chiaro che se l'origine del sistema mobile di coordinate viene scelta come stabilito nel cen-tro d'inerzia, questo termine si annulla perché Σmr = 0. Per il terzo termine infine, sviluppiamo il quadrato del prodotto vettoriale, ottenendo: [identità di Lagrange per il prodotto scalare tra due prodotti vettoriali: (a x b)(c x d) = (ac)(bd) – (bc)(ad) , quindi (a x b)2 = a2 b2 - (ab)2]
T=V 2
2
12∑ m{2 r 2−r 2}. (32,1)
Così l'energia cinetica di un solido può essere rappresentata sotto forma di una somma di due termini. Il primo di questi nella (32,1) è l'energia cinetica del moto di traslazione: ha la forma che avrebbe se tutta la massa fosse concentrata nel suo centro d'inerzia. Il secondo termine è l'energia ci-netica di un moto di rotazione di velocità angolare Ω attorno ad un asse passante per il centro d'iner-zia. Sottolineiamo che la possibilità di separare in questo modo l'energia cinetica in due parti è su-bordinata alla scelta dell'origine del sistema solidale al corpo precisamente nel centro d'inerzia di questo. [tale risultato è di solito menzionato come teorema di König]
Scriviamo l'energia cinetica di rotazione in notazione tensoriale [Il tensore è la generalizzazione del concetto di vettore. Un vettore k è un ente caratterizzato da n componenti, contraddistinte da un indice: ki
1 Nel caso generale in cui le direzioni di V e Ω non sono perpendicolari, possiamo scegliere l'origine delle coordinate in modo che V e Ω siano paralleli, cioè che il moto (all'istante dato) sia costituito globalmente da una rotazione attorno ad un unico asse e una traslazione lungo il medesimo asse. [moto elicoidale]
3

(i = 1, 2, ...n); un tensore T (doppio) è costituito da n 2 componenti, individuate da due indici: Ti j (i = 1, 2, ...n: j = 1, 2, ...n). Esso può quindi essere rappresentato da una matrice quadrata], cioè in funzione delle
componenti xi , Ωi dei vettori r , Ω 1 Si ha
T rot=12∑m {i
2 x l2−i x ik xk}=
12∑ m{ik i k x l
2−ik xi x k}=12i k∑ m x l
2i k−x i xk .
[nell'ultimo membro dell'espressione si ha una somma sugli indici i, k, che a sua volta include la somma sulle m] Abbiamo qui utilizzato l'identità Ωi = δi kΩi k dove δi k è il tensore unità (le cui componenti sono uguali all'unità per i = k e a zero per i ≠ k ). Introduciamo il tensore
I i k=∑ mx l2i k−x i xk , [i = 1, k = 1, x1
2 + x22 + x3
2 - x12; i = 1, k = 2, - x1 x2 ecc.] (32,2)
e otteniamo alla fine l'espressione dell'energia cinetica del solido nella forma
T=V 2
2
12
I i kik . (32,3)
La funzione di Lagrange del solido si ottiene sottraendo l'energia potenziale dalla (32,3):
L=V 2
2
12
I i ki k−U. (32,4)
L'energia potenziale è in generale funzione delle sei variabili che determinano la posizione del cor-po, per esempio le tre coordinate X, Y, Z del centro d'inerzia e i tre angoli che definiscono l'orienta-mento degli assi di coordinate mobili rispetto agli assi fissi.
Il tensore Iik è chiamato tensore dei momenti d'inerzia o semplicemente tensore d'inerzia del corpo. In base alla sua definizione (32,2), esso è evidentemente simmetrico:
Iik = Iki . (32,5)
Scriviamo la tavola delle sue componenti
I ik=∑ m y2z 2 −∑ m x y −∑ m x z−∑ m y x ∑ m x2z 2 −∑ m y z−∑m z x −∑ m z y ∑ m x2 y2. (32,6)
Le componenti Ixx , Iyy , Izz sono a volte chiamate momenti d'inerzia rispetto agli assi corrispondenti.
Il tensore d'inerzia è evidentemente additivo: i momenti d'inerzia di un corpo sono uguali alle somme dei momenti d'inerzia delle sue parti.
Nella definizione (32,2), se il solido può essere considerato continuo, la somma sarà sostituita da un integrale esteso al volume del corpo
I i k=∫xl2 i k− xi xk d V . (32,7)
Come ogni tensore simmetrico del secondo ordine, il tensore d'inerzia può essere trasformato nella forma diagonale con una scelta appropriata delle direzioni degli assi x1 , x2 , x3 . Queste dire-
1 In questo capitolo le lettere i, k, l, indicano degli indici tensoriali che prendono i valori 1, 2, 3. Inoltre, applichiamo ovunque la nota regola della somma, per cui si omettono i segni di sommatoria sottintendendo la somma sui valori 1, 2, 3, per tutti gli indici (detti “muti”) che si ripetono due volte; così AiBi = AB, A2
l = AlAl = A2, ecc. si può evidentemente cambiare la designazione degli indici muti (a patto tuttavia che non coincida con quella degli altri indici tensoriali che compaiono nell'espressione data).
4

zioni sono dette assi principali d'inerzia [a due a due ortogonali], e i corrispondenti valori delle com-
ponenti del tensore, momenti principali d'inerzia; indichiamoli con I1 , I2 , I3 . [si parla in genere di assi e momenti centrali in quanto relativi al centro d'inerzia] Con tale scelta degli assi x1 , x2 , x3 l'energia cinetica di rotazione si esprime in una forma particolarmente semplice:
T rot=12 I 11
2 I 222I 33
2. (32,8)
[Ω1 , Ω2 , Ω3 sono quindi le componenti della rotazione rispetto agli assi principali d'inerzia]Osserviamo che nessuno dei tre momenti principali d'inerzia può superare la somma degli altri
due. Infatti, ad esempio
I 1I 2=∑ mx12x2
22 x32≥∑ m x1
2 x22= I 3. (32,9)
Si chiama trottola asimmetrica un corpo i cui i tre momenti principali d'inerzia sono tra loro di-versi.
Un corpo si chiamerà trottola simmetrica se due dei suoi momenti principali sono uguali, cioè I1 = I2 ≠ I3 . In questo caso, la scelta della direzione degli assi principali nel piano x1 x2 è arbitraria.
Se infine i tre momenti principali d'inerzia hanno ugual valore, il corpo è chiamato trottola sfe-rica. In questo caso, i tre assi principali d'inerzia possono essere scelti arbitrariamente: si possono prendere tre assi qualsiasi perpendicolari tra loro.
La ricerca degli assi principali d'inerzia si semplifica molto se il solido possiede qualche sim-metria; è chiaro che la posizione del centro d'inerzia e le direzioni degli assi principali devono avere la stessa simmetria.
Così, se un corpo possiede un piano di simmetria, il suo centro d'inerzia si deve trovare in que-sto piano. Questo contiene anche due assi principali d'inerzia, e il terzo gli è perpendicolare. Un si-stema di particelle distribuite in un piano costituisce evidentemente un caso di questo genere. Esiste una relazione semplice tra i tre momenti principali d'inerzia. Se si prende come piano x1x2 il piano del sistema, si ha allora, poiché x3 = 0 per tutte le particelle,
I 1=∑ m x22 , I 2=∑ m x1
2 , I 3=∑ mx12x2
2 ,
per cuiI 3=I 1 I 2 . (32,10)
Se il corpo possiede un asse di simmetria di ordine qualsiasi, il suo centro d'inerzia sarà situato su tale asse. Uno degli assi principali coinciderà con questo asse, e gli altri due gli saranno perpen-dicolari. Se l'ordine dell'asse di simmetria è superiore a 2, il corpo diventa una trottola simmetrica. Infatti, si può in tal caso far ruotare ciascun asse principale (perpendicolarmente all'asse di simme-tria) di un angolo diverso da 180°, vale a dire che la scelta di questi assi non è più univoca, cosa che è possibile solo nel caso di una trottola simmetrica.
Un caso particolare è quello di un sistema di particelle distribuite lungo una retta. Se si prende questa retta come asse x3 , si avrà per tutte le particelle x1 = x2 = 0, per cui coincideranno due mo-menti principali d'inerzia, mentre il terzo è nullo:
I 1=I 2=∑ m x32 , I 3=0 . (32,11)
Un tale sistema si chiama rotatore . Ciò che conferisce ad un rotatore il suo particolare carattere ri-spetto ad un corpo qualunque è il fatto che esso ha in tutto due (e non tre) gradi libertà di rotazione, corrispondenti alle rotazioni attorno agli assi x1 e x2 ; parlare di rotazione di una retta attorno a se
5

stessa non ha evidentemente alcun senso.
Facciamo un'ultima osservazione riguardante il calcolo del tensore d'inerzia. Anche se abbiamo definito questo tensore rispetto ad un sistema di coordinate avente l'origine nel centro d'inerzia (ed è solo con questa definizione che la formula fondamentale (32,3) è valida), può tuttavia apparire più comodo calcolare prima il tensore analogo
I ' i k=∑m x ' l2i k−x ' i x ' k ,
definito rispetto ad un'altra origine O'. Se la distanza OO' è data da un vettore a, si ha r = r' + a e xi = x'i + ai ; tenuto conto anche che ∑ mr=0 per definizione del punto O, si trova:
I'i k = Ii k + μ (a2δik – ai ak). (32,12)
[è il cosiddetto teorema di Huygens. Dalla definizione si haI ' 11=∑ x ' 2
2x ' 32=∑ m [x2−a2
2x3−a32]=∑ m x2
2 x32−2∑ mx1 a1x2 a2a2
2a32
ed essendo il primo termine uguale a I11 , il secondo nullo perché proporzionale alle coordinate del centro d'i-nerzia, si ha I'11 = I11 + μ [(a2
1 +a22 + a2
3)δ11 – a21] ;
I ' 12=−∑m x1−a1x2−a2=−∑ m x1 x2−a1∑ m x1−a2∑ m x2−a1 a2 , come sopra si an-nullano il secondo e terzo termine, e δ12 = 0 ] In base a questa formula e noto I'i k è facile calcolare il tensore Ii k cercato.
Problemi1. Determinare i momenti principali d'inerzia per delle molecole considerate come sistemi di parti-celle, situate a distanze reciproche fisse, nei seguenti casi:
a) Molecola i cui atomi sono distribuiti su una retta. Risposta:
I 1=I 2=1∑a≠b
ma mb la b2 , I 3=0 ,
dove ma e mb sono le masse degli atomi e lab la distanza tra gli atomi a e b ; la somma sarà effet-tuata per tutte le coppie di atomi nella molecola (ogni coppia di valori a , b compare una sola volta nella somma). [la formula indicata è equivalente a quella generale; vediamo per semplicità il caso di 3 atomi (m1 ,x1), (m2 ,x2 ), (m3 ,x3): m1 m2x1− x2
2m1 m3 x1−x32m2 m3x2− x3
2 =
= m1 m2[ x1− x0−x2− x0]2m1 m3[x1−x0−x3−x0]
2m2 m3[ x2−x0−x3−x0]2 =
= m1x1− x02m2m3m2 x2−x0
2m1m3m3x3− x02m1m2−2 m1 m2x1− x0x2−x0 -
- −2m1 m3x1−x0x3−x0−2m2 m3x2−x0 x3−x0 =
= I−[m1 x1−x0m2x2−x0m3x3− x0]2= I
(x0 = ascissa del centro d'inerzia, =m1m2m3 ) ] Per una molecola biatomica, la somma si riduce ad un solo termine, dando un risultato evidente a priori: il prodotto della massa ridotta dei due atomi per il quadrato della loro distanza:
6

I 1=I 2=m1 m2
m1m2l 2 .
b) Molecola triatomica avente la forma di un triangolo isoscele [di lato di base a] (Fig. 36)
Risposta: Il centro d'inerzia è situato sull'altezza del triangolo a una distanza X2 = m2 h/μ dalla ba-se. Momenti d'inerzia: [l'asse x2 è principale per simmetria, quindi lo è anche l'asse x1 ad esso ortogonale e passante per il centro d'inerzia]
I 1=2 m1 m2
h2 , I 2=
m1
2a2 , I 3=I 1I 2 .
c) Molecola tetratomica i cui atomi sono situati ai vertici di una piramide triangolare retta [altezza h](Fig. 37).
Risposta: Il centro d'inerzia è situato sull'altezza della piramide ad una distanza X3 = m2h/μ dalla base. Momenti d'inerzia:
I 1=I 2=3 m1 m2
h2
m1 a2
2, I 3=m1 a2 .
Per m1=m2 , h=a 23
otteniamo una molecola tetraedrica [tetraedro regolare di spigolo a] di mo-
menti d'inerzia
I1 = I2 = I3 = m1a2. 2. Determinare i momenti principali d'inerzia dei seguenti corpi omogenei continui. a) Asta sottile di lunghezza l .
Risposta: I 1=I 2=1
12 l 2 , I 3=0 (si trascura lo spessore dell'asta). [si deve calcolare l'integrale
2∫0
l /2l
x2 d x ] b) Sfera di raggio R. Risposta:
I 1=I 2=I 3=25R2
(bisogna calcolare la somma I 1I 2I 3=2∫ r2 d V ). [ρ = μ/V densità di massa. Si ha per sim-
7

metria I 1=I 2=I 3= I '=∫ y2 z2d V=∫ x2z2d V=∫ x2 y2d V ,
3 I '=I 1I 2I 3=2∫x2 y2z 2dV=2∫ r 2 dV=2∫0
R
r2 4 r2 d r=8 R5
5=6
5R2 , da
cui il risultato sopra indicato. Essendo le variabili x, y, z, del tutto equivalenti, si ha pure: ∫ x2 d V=∫ y2 d V=∫ z2 d V=1
2I ' (ved. problema 2 f )]
c) Cilindro circolare di raggio R e altezza h . Risposta:
I 1=I 2=4 R2
h2
3 , I 3=2 R2
( x3 asse del cilindro).
d) Parallelepipedo rettangolo di spigoli a, b, c. Risposta:
I 1=
12b2c2 , I 2=
12c2a2 , I 3=
12a2b2
(gli assi x1, x2, x3 sono paralleli agli spigoli a, b, c ).e) Cono circolare di altezza h e raggio di base R . Soluzione. Calcoliamo prima il tensore I'i k rispetto ad assi aventi l'origine nel vertice del cono (Fig. 38). Il calcolo si effettua facilmente in coordinate cilindriche e si trova [assumendo come asse di riferi-mento l'asse z , si calcola l'integrale I ' 1,2=∫ r d r d d z r 2sin 2z2 con i limiti 0,2 , r 0, R z
h , z 0, h ]
I ' 1=I ' 2=35 R2
4 h2, I ' 3=310 R2 .
Il centro di gravità, come fa vedere un semplice calcolo, si trova sull'asse del cono ad una distanza
a=3 h4 dal vertice. In base alla formula (32,12) si trova alla fine
I 1=I 2=I ' 1−a2=320 R2
h2
4 , I 3=I ' 3=310 R2.
8

f) Ellissoide con tre assi di simmetria e semiassi a, b, c. Soluzione. Il centro d'inerzia coincide con il centro dell'ellissoide e gli assi principali d'inerzia coincidono con i suoi assi. L'integrazione estesa al volume dell'ellissoide si può ricondurre ad una integrazione sul volume di una sfera mediante il cambiamento di coordinate x = aξ , y = bη , z = cζ che trasforma l'equazione di superficie dell'ellissoide
x2
a2y2
b2z2
c2=1
in equazione di superficie della sfera unitaria
ξ2 + η2 + ζ2 = 1 .Si ottiene così per il momento d'inerzia relativo all'asse x :
I 1=∭ y2z 2d x d y d z=a b c∭b22c22d d d =a bc 12
I ' b2c2 ,
dove I' è il momento d'inerzia della sfera di raggio unitario. Tenendo conto che il volume dell'ellis-
soide è uguale a 43a bc , si ottengono alla fine i momenti d'inerzia
I 1=5b2c2 , I 2=
5a2c2 , I 3=
5a2b2.
[si ha infatti ∭ b22c22d d d =b2∫2 d Vc2∫2 d V=b2 12
I 'c2 12
I ' (ved. problema
2b); inoltre I 1=a b c
2b2c2 2
543 (introducendo il volume della sfera di raggio unitario), e si trova il
risultato sopra indicato essendo 43
a bc= ]
3. Determinare la frequenza delle piccole oscillazioni di un pendolo fisico (corpo solido oscillante in un campo di gravità attorno ad un asse orizzontale fisso).
Soluzione. Sia l la distanza dal centro d'inerzia del pendolo all'asse di rotazione, e α, β, γ gli angoli formati dalle direzioni degli assi principali d'inerzia del pendolo con l'asse di rotazione. Come coor-dinata variabile, facciamo intervenire l'angolo φ tra la verticale e la perpendicolare condotta dal centro d'inerzia sull'asse di rotazione. La velocità del centro d'inerzia è V=l , e le proiezioni della velocità angolare sugli assi principali d'inerzia: cos , cos , cos . Considerando piccolo l'angolo φ , troviamo l'energia potenziale nella forma
U= g l 1−cos≃12 g l2 .
La funzione di Lagrange è quindi
L= l 2
22
12 I 1 cos2I 2 cos2 I 3 cos22−
g l22.
[l'espressione entro parentesi rotonde è il momento d'inerzia del corpo rispetto all'asse di rotazione] Si ricava la frequenza delle oscillazioni
2= g l l 2I 1cos2I 2cos2I 3cos2
.
4. Trovare l'energia cinetica del sistema rappresentato in Fig. 39; OA e AB sono delle aste sottili
9

omogenee di lunghezza l unite nel punto A con una cerniera. L'asta OA ruota attorno al punto O (nel piano della figura), e l'estremità B dell'asta AB scorre lungo l'asse Ox.Soluzione. La velocità del centro d'inerzia dell'asta OA (situato nel suo centro) è l /2 , dove φ è l'angolo AOB. L'energia cinetica dell'asta OA è quindi
T 1= l 2
82
I22
(μ massa di un'asta).
Le coordinate cartesiane del centro d'inerzia dell'asta AB sono X=3 l2
cos , Y= l2
sin . Poiché
la velocità angolare di rotazione di quest'asta è pure uguale a , la sua energia cinetica è
T 2=2 X 2Y 2 I
22= l 2
818sin 22 I 2
2,
da cui si ha l'energia cinetica totale del sistema
T= l 2
313sin22
(si è posto I = μl 2/12 in base al problema 2a).
5. Trovare l'energia cinetica di un cilindro (di raggio R) che rotola su un piano. La massa del cilin-dro è ripartita nel suo volume in modo tale che uno degli assi principali d'inerzia è parallelo all'asse del cilindro e passa ad una distanza a da quest'ultimo; il momento d'inerzia relativo a quest'asse è I.Soluzione. Introduciamo l'angolo φ tra la verticale e la verticale abbassata dal centro di gravità sul-l'asse del cilindro (Fig. 40). Si può considerare il moto istantaneo del cilindro come una rotazione pura attorno all'asse di istantanea rotazione che coincide con la linea di contatto tra il cilindro e il piano fisso; la velocità angolare di tale rotazione è , (la velocità angolare di rotazione attorno a tutti gli assi paralleli è la stessa). Il centro d'inerzia si trova ad una distanza a2R2−2 a R cosdall'asse di istantanea rotazione e la sua velocità è, di conseguenza, V=a2R2−2a R cos .Energia cinetica totale
T=2a2R2−2 a R cos2 I
22 .
6. Trovare l'energia cinetica di un cilindro omogeneo di raggio a che rotola all'interno di una su-perficie cilindrica di raggio R. (Fig. 41)
10

Soluzione. Utilizziamo l'angolo φ formato dalla retta che unisce i centri dei due cilindri, e la vertica-le. Il centro d'inerzia del cilindro che rotola si trova sull'asse e la sua velocità è V=R−a .Calcoliamo la velocità angolare come velocità di rotazione pura attorno all'asse di istantanea rota-zione che coincide con la linea di contatto tra i due cilindri; essa è uguale a
=Va= R−a
a.
Se I3 è il momento d'inerzia relativo all'asse del cilindro [ I 3=2
a2 ], si ha:
T=2R−a 22
I 3
2R−a 2
a2 2=34R−a22
(I3 è ricavato dal problema 2c).
7. Trovare l'energia cinetica di un cono omogeneo che rotola su un piano.
Soluzione. Sia θ l'angolo formato dalla linea OA di contatto tra il cono e il piano, ed una direzione fissa qualsiasi in questo piano (Fig. 42). Il centro d'inerzia si trova sull'asse del cono, e la sua
velocità è V=acos , dove 2α è l'angolo di apertura del cono, e a la distanza del centro d'i-nerzia dal vertice. Calcoliamo la velocità angolare di rotazione come velocità di rotazione pura at-torno all'asse di istantanea rotazione OA:
= Va sin
= ctg .
Uno degli assi principali d'inerzia (asse x3) coincide con l'asse del cono; scegliamo l'altro (x2) per-pendicolare all'asse del cono e alla retta OA. [e quindi x1 nel piano OA-x3]Le proiezioni del vettore Ω (diretto parallelamente a OA) sugli assi principali d'inerzia sono allora: Ω sin α, 0, Ω cos α. Troviamo allora per l'energia cinetica cercata:
T= a2
2cos2 2
I 1
2cos22
I 3
2cos4sin 2
2=3 h2
40215cos2
(h altezza del cono, I1 , I3, a dal problema 2e). [ I 1=4a2
15tg 24 , I 3=
8a2 tg 215
]
8. Trovare l'energia cinetica di un cono omogeneo la cui base rotola su un piano, e il cui vertice si
11

trova sopra questo piano ad una altezza uguale al raggio dei base (in modo che l'asse del cono è pa-rallelo al piano).
Soluzione. Utilizziamo l'angolo θ tra una direzione fissa nel piano e la proiezione dell'asse del cono sul piano (Fig. 43). La velocità del centro d'inerzia è allora V=a (stesse notazioni del problema 7). L'asse di istantanea rotazione è in questo caso la generatrice OA del cono condotta nel punto di contatto del cono con il piano [infatti è vO = vA = 0, quindi tutti i punti della retta OA, per la condizione di ri-gidezza, hanno velocità istantanea nulla]. Il centro d'inerzia si trova alla distanza a sinα da questo asse, e di conseguenza
=V
a sin=
sin
.
Le proiezioni del vettore Ω sugli assi principali d'inerzia (scegliamo l'asse x2 perpendicolare all'as-se del cono e alla direzione OA) sono:
sin= , 0, cos= ctg .
L'energia cinetica è pertanto
T=a2
22
I 1
22
I 3
22 ctg 2=3h2
402 1
cos25.
[come si vede, risulta uguale all'energia cinetica del problema 7 divisa per cos2α, quindi leggermente maggiore]9. Trovare l'energia cinetica di un ellissoide omogeneo con tre assi di simmetria, che ruota attorno ad uno dei suoi assi (AB, Fig. 44), mentre quest'ultimo ruota a sua attorno alla perpendicolare CD che passa per il centro dell'ellissoide.
Soluzione. Chiamiamo θ l'angolo di rotazione attorno all'asse CD e φ l'angolo di rotazione attorno all'asse AB (angolo tra CD e l'asse d'inerzia x1 perpendicolare a AB). Le proiezioni di Ω sugli assi d'inerzia sono allora
cos , sin ,
(l'asse x3 coincide con AB). [la velocità angolare ha componente nulla secondo l'asse AB che le è per-pendicolare, ed ha componenti variabili secondo gli altri due assi d'inerzia che ruotano nel piano perpendicolare a AB, contenente , con frequenza ] Poiché il centro d'inerzia, che coincide col centro dell'el-
12

lissoide, è in quiete, l'energia cinetica è
T=12 I 1cos2 I 2 sin221
2I 3
2 .
10. Stesso problema, ma con l'asse AB inclinato, e l'ellissoide simmetrico rispetto a questo asse (Fig. 45).
Soluzione. Le proiezioni di Ω sull'asse AB e sugli altri due assi principali d'inerzia perpendicolari a AB (e che si possono scegliere in modo arbitrario) sono:
coscos , cossin , sin .
Quindi l'energia cinetica è
T=I 1
2cos2⋅2
I 3
2sin2 .
[il problema è analogo al precedente, al quale si riconduce subito scomponendo la velocità angolare se-condo la retta AB e la sua perpendicolare]
§ 33. Momento cinetico del solido
Sappiamo che il momento cinetico di un sistema dipende dalla scelta del punto rispetto al quale è definito. In meccanica del solido, è conveniente scegliere questo punto nell'origine del sistema fis-so [leggasi mobile] di coordinate, cioè nel centro d'inerzia del corpo. In seguito, indicheremo con M il momento definito precisamente in questo modo.
In base alla formula (9,6), quando si sceglie l'origine delle coordinate nel centro d'inerzia del corpo, il suo momento coincide con il “momento proprio” legato solamente al moto dei punti del corpo rispetto al centro d'inerzia. In altri termini, nella definizione M=∑m r×v bisogna sosti-tuire v con ×r :
M=∑m r××r =∑m {r2−r r},
[applicando la trasformazione del doppio prodotto vettoriale] cioè in notazione tensoriale:
13
M i=∑ m{x l2i−x i xkk}=k∑m {x l
2i k− xi x k}.
[ x l2= x1
2x22x3
2 , al 2° membro si intende la somma su tutti i k] Tenuto conto della definizione (32,2) del tensore d'inerzia, otteniamo alla fine
Mi = Iik Ωk . (33,1)
Se gli assi x1 , x2 , x3 sono diretti secondo gli assi principali d'inerzia del corpo, questa formula dà
M1 = I1Ω1 , M2 = I2Ω2 , M3 = I3Ω3 . (33,2)
In particolare, per una trottola sferica i cui tre momenti principali d'inerzia coincidono, si ha semplicemente:
M = I Ω , (33,3)
cioè il vettore momento è proporzionale al vettore velocità angolare ed ha la stessa direzione.
Nel caso generale di un corpo qualsiasi la direzione del vettore M non coincide con quella del vettore Ω ; è solo quando si ha la rotazione del corpo attorno ad uno degli assi principali d'inerzia che M e Ω hanno la stessa direzione.
Consideriamo il moto libero di un solido [non] soggetto all'azione di una forza esterna. Il moto di traslazione uniforme non interessa in questa sede, e noi non lo prendiamo in considerazione, per cui abbiamo a che fare con una rotazione libera.
Come per ogni sistema isolato, il momento cinetico di un corpo animato di un moto di rotazione libera, è costante. Per una trottola sferica la condizione M = cost implica semplicemente Ω = cost. Questo significa che nel caso generale la rotazione libera di una trottola sferica è semplicemente una rotazione uniforme attorno ad un asse costante.
Il caso del rotatore è altrettanto semplice. Abbiamo anche qui M = I Ω , col vettore Ω perpen-dicolare all'asse del rotatore. Perciò la rotazione libera di un rotatore è una rotazione uniforme in un piano attorno ad una direzione perpendicolare a tale piano.
La legge di conservazione del momento è sufficiente per definire la rotazione libera anche nel caso più complesso di una trottola simmetrica.
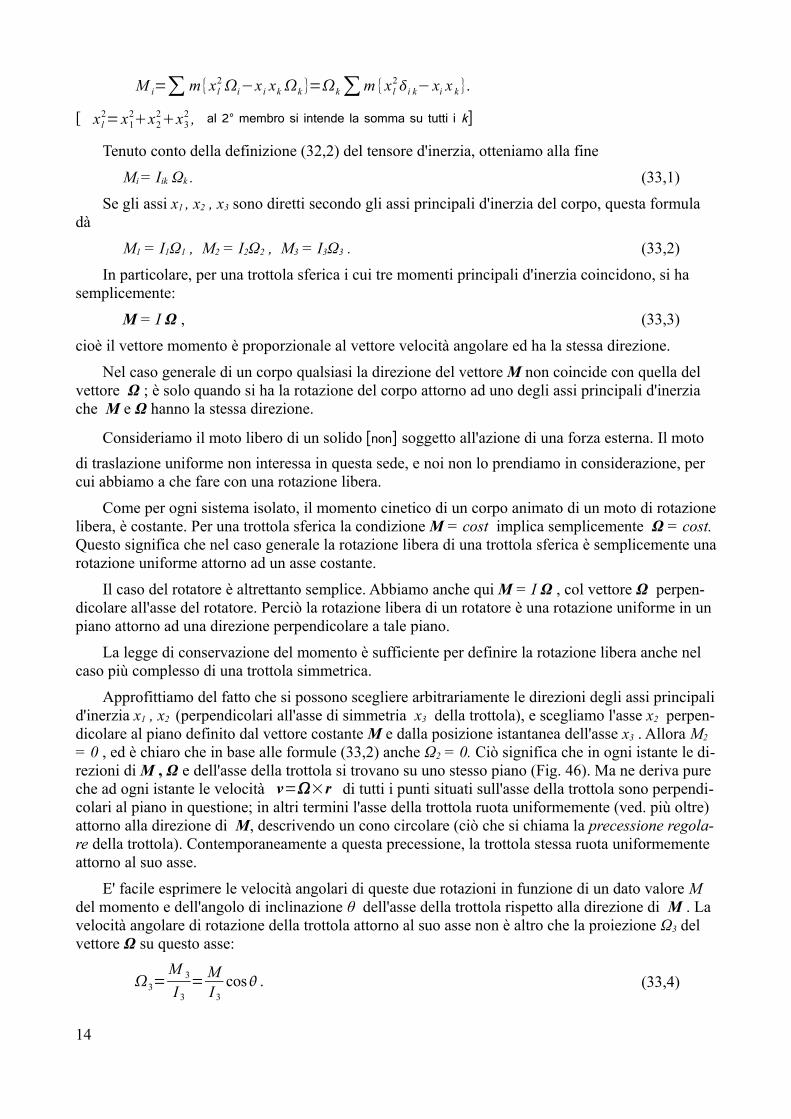
Approfittiamo del fatto che si possono scegliere arbitrariamente le direzioni degli assi principali d'inerzia x1 , x2 (perpendicolari all'asse di simmetria x3 della trottola), e scegliamo l'asse x2 perpen-dicolare al piano definito dal vettore costante M e dalla posizione istantanea dell'asse x3 . Allora M2
= 0 , ed è chiaro che in base alle formule (33,2) anche Ω2 = 0. Ciò significa che in ogni istante le di-rezioni di M , Ω e dell'asse della trottola si trovano su uno stesso piano (Fig. 46). Ma ne deriva pure che ad ogni istante le velocità v=×r di tutti i punti situati sull'asse della trottola sono perpendi-colari al piano in questione; in altri termini l'asse della trottola ruota uniformemente (ved. più oltre) attorno alla direzione di M, descrivendo un cono circolare (ciò che si chiama la precessione regola-re della trottola). Contemporaneamente a questa precessione, la trottola stessa ruota uniformemente attorno al suo asse.
E' facile esprimere le velocità angolari di queste due rotazioni in funzione di un dato valore M del momento e dell'angolo di inclinazione θ dell'asse della trottola rispetto alla direzione di M . La velocità angolare di rotazione della trottola attorno al suo asse non è altro che la proiezione Ω3 del vettore Ω su questo asse:
3=M 3
I 3=M
I 3cos . (33,4)
14

Per determinare la velocità di precessione Ωpr bisogna scomporre il vettore Ω secondo la regola del parallelogramma nelle sue componenti lungo x3 e M. La prima non produce alcuno spostamento dell'asse stesso della trottola, e di conseguenza la seconda fornisce la velocità angolare cercata della precessione. La costruzione della Fig. 46 fa vedere che sin θ Ωp r = Ω1 , e poiché Ω1 = M1/I1 =M sinθ/I1 , si ha
pr=MI 1
. (33,5)
[ 1) E' opportuno completare il calcolo del momento cinetico, distinguendo fra i diversi casi di vincolo del corpo rigido. In generale il momento rispetto ad un qualsiasi punto fisso A vale:
M A=∑i
AP i×mi vi=∑i
APi×miv ' ivG=∑i
APi×mi v ' i∑i
APi×mi vG=M G AG× vG 1 dove G è il centro d'inerzia e ∑
imi APi=AG . M(G) è quindi il momento degli impulsi relativi al centro
d'inerzia. Questa formula vale in particolare se il corpo è libero. Se B è un altro punto fisso distinto da A, ab-biamo M B=∑
iBAAP i×mi v i=M ABA× vG . Se il corpo ha un punto fisso, il calcolo è quello
indicato nel testo con la precisazione che, se tale punto non coincide col centro d'inerzia, il tensore d'inerzia o i momenti principali d'inerzia sono quelli relativi al punto in questione. Se infine il corpo ha un asse fisso, detta la velocità angolare di rotazione attorno a tale asse, che assumiamo come asse x3 , si ha:
M=[ I i k ]⋅00 dove [ I i k ] è il tensore d'inerzia; se in particolare tale asse è asse principale, allora
M=I 3 ed ha la stessa direzione dell'asse.
2) Nel moto di un corpo rigido avente un asse di simmetria e un momento cinetico costante, per poter parlare di moto di precessione attorno a M, occorrerebbe dimostrare che l'angolo tra M e il vettore velocità angolare Ω è costante nel tempo. Una trattazione più completa di questo problema viene comunque svolta alla fine del § 35]
15

§ 34. Equazioni del moto di un solido
Poiché un corpo solido possiede in generale sei gradi di libertà, il sistema generale delle equa-zioni del moto deve comprendere sei equazioni indipendenti. Esse si possono scrivere nella forma di definizione delle derivate rispetto al tempo di due vettori: l'impulso e il momento del corpo. [come già osservato, si tratta della quantità di moto e del momento della quantità di moto, e le relative equazioni sono dette equazioni cardinali della dinamica]
La prima di queste equazioni si ottiene semplicemente sommando le equazioni p= f per cia-scuna delle particelle che compongono il corpo, essendo p l'impulso di una particella, e f la forza che agisce su di essa. Facendo intervenire l'impulso totale del corpo
P=∑ p=V
e la forza totale ∑ f =F che agisce su di esso , si ottiene
d Pd t=F . [1° equazione] (34,1)
Anche se abbiamo definito F come la somma di tutte le forze f agenti su ogni particella, com-prese le forze esercitate dalle altre particelle del corpo, in F entrano solo in effetti le forze dovute alle sorgenti esterne. Tutte le forze di interazione tra le particelle del corpo stesso si annullano reci-procamente; in sostanza, in assenza di forze esterne, l'impulso del corpo, come per ogni sistema chiuso, si deve conservare, cioè si deve avere F = 0.
Se U è l'energia potenziale del solido in un campo esterno, la forza F può essere definita come derivata di questa energia rispetto alle coordinate del centro d'inerzia del corpo:
F=− ∂U∂ R
. (34,2)
[ricordiamo che per derivata rispetto ad un vettore si intende un vettore avente come componenti le derivate ri-spetto alle componenti del primo vettore] In effetti, per una piccola traslazione δR del corpo, i raggi vet-tori τ di ogni suo punto mutano di altrettanto, e la variazione di energia potenziale è perciò
U=∑ ∂U∂
=R∑ ∂U∂
=−R∑ f=−F R .
Osserviamo in proposito che l'equazione (34,1) può essere ottenuta anche come equazione di Lagrange relativa alle coordinate del centro d'inerzia
dd t∂L∂V
=∂ L∂ R
con la funzione di Lagrange (32,4), in base a cui∂ L∂V
=V=P , ∂ L∂ R
=− ∂U∂R
=F .
Costruiamo ora la seconda equazione del moto che determina la derivata rispetto al tempo del momento di impulso M . Per semplificare i calcoli, è comodo scegliere un sistema di riferimento “fisso” (galileiano) in modo tale che ad un certo istante il centro d'inerzia del corpo sia in quiete. L'equazione del moto così ottenuta sarà di conseguenza, in virtù del principio di relatività di Gali-leo, valido in ogni altro sistema di riferimento galileiano.
16

Si ha:
M= dd t∑ r×p=∑ r× p∑ r× p .
In base alla scelta che abbiamo fatto per il sistema di riferimento (in cui V = 0), il valore di rcoincide ad ogni istante con la velocità v= . E poiché i vettori v e p = mv hanno la stessa dire-zione, r× p=0. Sostituiamo allora p con la forza f , ottenendo alla fine
d Md t
=K , [2° equazione] (34,3)
dove
K=∑ r× f . (34,4)
[Senza porre alcuna restrizione, deriviamo l'espressione del momento cinetico M A=∑ APi×mi vi relativo ad un punto A (fisso o mobile):
M A=∑ dd t APi×mi v i=∑ d
d tOPi−OA×mi v i∑ AP i×
dd tmi v i =
= ∑ v i×mi v i−∑ v A×mi v i∑ AP i×mi ai=− vA× vG∑ AP i×mi ai , dove O è un punto fisso. Allora, partendo dall'equazione (34,1) ∑ p i=∑ f i e prendendo il momento di ambo i membri rispetto ad un punto A, si ottiene: ∑ APi× p i=∑ AP i×mi ai=M Av A×vG=∑ APi× f i , cioè
M AvA× vG=K A . Se A è un punto fisso oppure coincide con G, si ha semplicemente M A=K A . ]Il vettore r× f si chiama momento della forza f , per cui K è la somma dei momenti di tutte le
forze che agiscono sul corpo. Come per la forza totale F, si deve tener conto, nella somma (34,4), solo delle forze esterne; in accordo alla legge di conservazione del momento cinetico, la somma dei momenti di tutte le forze che agiscono all'interno del sistema chiuso deve annullarsi.
Il momento delle forze, come il momento d'impulso, dipende in generale dalla scelta dell'origi-ne delle coordinate rispetto al quale è definito. Nelle (34,3) e (34,4) i momenti sono definiti rispetto al centro d'inerzia del corpo.
Se si trasporta l'origine delle coordinate ad una distanza a , i nuovi raggi vettori r' dei punti del corpo saranno legati ai precedenti r da r = r' + a . Di conseguenza
K=∑ r× f=∑ r '× f ∑ a× f
cioèK=K 'a×F . (34,5)
Ne consegue in particolare che il valore del momento delle forze non dipende dalla scelta dell'origi-ne delle coordinate se la forza totale F = 0 (in questo caso si dice che il corpo è soggetto ad una coppia di forze).
Si può considerare l'equazione (34,3) come equazione di Lagranged
d t∂L∂
= ∂L∂
relativa alle “coordinate di rotazione”. In effetti, derivando la funzione di Lagrange (32,4) rispetto alle coordinate del vettore Ω , si ottiene
17

∂L∂i
=I i kk=M i .
[Iik Ωk = ½ IikΩk + ½Iki Ωk] La variazione dell'energia potenziale U quando si fa ruotare il corpo di un angolo δφ infinitesimo, è allora
U=−∑ f =−∑ f ×r =−∑ r× f=−K ,
da cui
K=− ∂U∂
, (34,6)
per cui∂L∂=− ∂U
∂=K .
Supponiamo che i vettori F e K siano perpendicolari tra loro. In tal caso si può sempre trovare un vettore a tale che K' si annulli nella formula (34,5), per cui si avrà
K=a×F . (34,7)
Ma la scelta di a non è univoca: se si aggiunge un vettore qualunque parallelo a F , questo non mu-terà per nulla l'uguaglianza (34,7), di modo che la condizione K' = 0 fornirà non un punto determi-nato nel sistema di coordinate fisso, ma solo una retta determinata. Così, per K ┴ F l'azione di tutte le forze applicate al corpo si può ricondurre ad un'unica forza F agente lungo una retta determinata.
Questo è in particolare il caso di un campo di forze omogeneo, in cui la forza agente su un pun-to materiale è del tipo f = eE dove E è un vettore costante caratteristico del campo, e e una gran-dezza caratteristica delle proprietà della particella nel campo dato1. Abbiamo in questo caso
F=E∑ e , K=∑ e r×E .
Ponendo ∑ e≠0 , introduciamo il raggio vettore r0 definito da
r 0=∑ e r
∑ e. (34,8)
Otteniamo allora per il momento totale delle forze l'espressione semplice seguente:K=r0×F . (34,9)
Quando un corpo solido si muove in un campo uniforme, l'influenza di questo si riduce quindi all'a-zione di una forza F , “applicata” nel punto di raggio vettore (34,8). La posizione di questo punto è interamente definita dalle proprietà del corpo stesso; in un campo di gravità per esempio, il punto coincide con il centro d'inerzia del corpo.
§ 35. Angoli di Eulero
Come abbiamo già visto, si può descrivere il moto di un solido mediante le tre coordinate del suo centro d'inerzia e tre angoli che definiscono l'orientamento degli assi x1 , x2 , x3 del sistema di coordinate mobile rispetto al sistema fisso X, Y, Z. per tali angoli, di solito è comodo utilizzare quel-li chiamati angoli di Eulero.
1 Così, in un campo elettrico uniforme, E è l'intensità del campo, e e la carica della particella. Nel campo di gravità uniforme E è l'accelerazione della forza di gravità (g), e e la massa della particella (m).
18
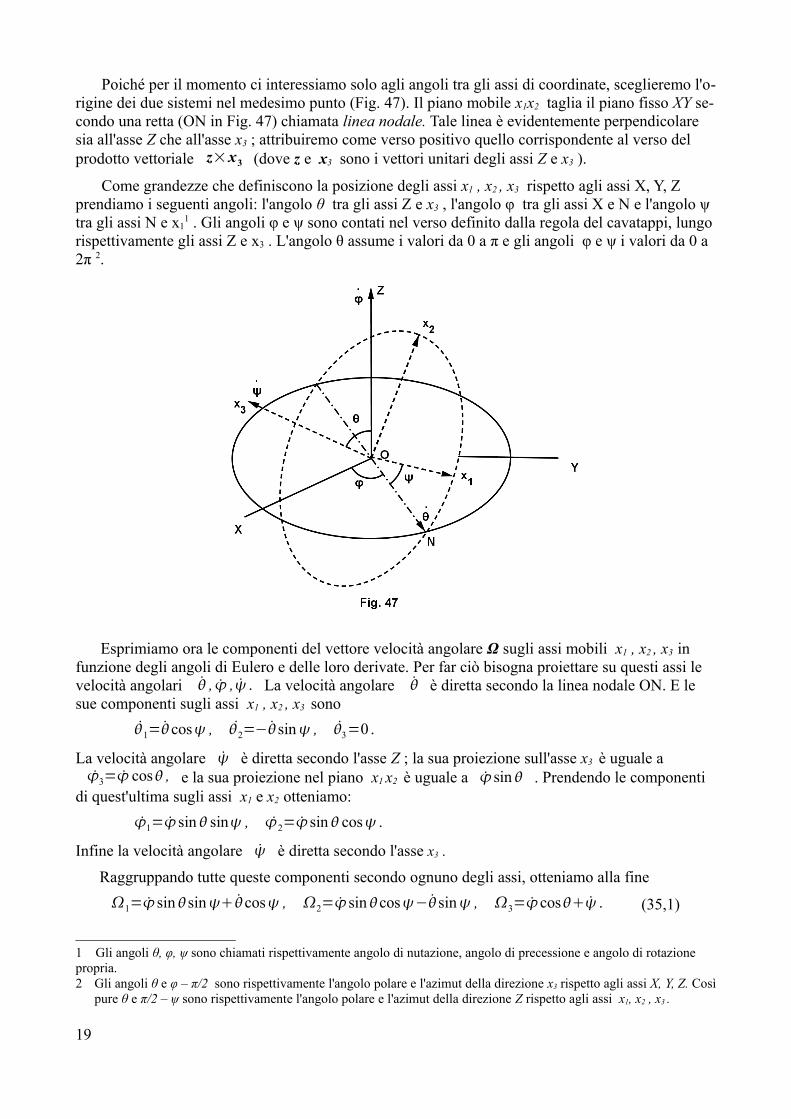
Poiché per il momento ci interessiamo solo agli angoli tra gli assi di coordinate, sceglieremo l'o-rigine dei due sistemi nel medesimo punto (Fig. 47). Il piano mobile x1x2 taglia il piano fisso XY se-condo una retta (ON in Fig. 47) chiamata linea nodale. Tale linea è evidentemente perpendicolare sia all'asse Z che all'asse x3 ; attribuiremo come verso positivo quello corrispondente al verso del prodotto vettoriale z×x3 (dove z e x3 sono i vettori unitari degli assi Z e x3 ).
Come grandezze che definiscono la posizione degli assi x1 , x2 , x3 rispetto agli assi X, Y, Z prendiamo i seguenti angoli: l'angolo θ tra gli assi Z e x3 , l'angolo φ tra gli assi X e N e l'angolo ψ tra gli assi N e x1
1 . Gli angoli φ e ψ sono contati nel verso definito dalla regola del cavatappi, lungo rispettivamente gli assi Z e x3 . L'angolo θ assume i valori da 0 a π e gli angoli φ e ψ i valori da 0 a 2π 2.
Esprimiamo ora le componenti del vettore velocità angolare Ω sugli assi mobili x1 , x2 , x3 in funzione degli angoli di Eulero e delle loro derivate. Per far ciò bisogna proiettare su questi assi le velocità angolari , , . La velocità angolare è diretta secondo la linea nodale ON. E le sue componenti sugli assi x1 , x2 , x3 sono
1=cos , 2=−sin , 3=0 .
La velocità angolare è diretta secondo l'asse Z ; la sua proiezione sull'asse x3 è uguale a3= cos , e la sua proiezione nel piano x1 x2 è uguale a sin . Prendendo le componenti
di quest'ultima sugli assi x1 e x2 otteniamo:1=sin sin , 2=sin cos .
Infine la velocità angolare è diretta secondo l'asse x3 .
Raggruppando tutte queste componenti secondo ognuno degli assi, otteniamo alla fine1=sinsincos , 2=sincos−sin , 3=cos . (35,1)
1 Gli angoli θ, φ, ψ sono chiamati rispettivamente angolo di nutazione, angolo di precessione e angolo di rotazione propria.2 Gli angoli θ e φ – π/2 sono rispettivamente l'angolo polare e l'azimut della direzione x3 rispetto agli assi X, Y, Z. Così
pure θ e π/2 – ψ sono rispettivamente l'angolo polare e l'azimut della direzione Z rispetto agli assi x1, x2 , x3 .
19
Se si fanno coincidere gli assi x1 , x2 , x3 con gli assi principali d'inerzia del solido, l'energia ci-netica di rotazione espressa in funzione degli angoli di Eulero si otterrà sostituendo le (35,1) nelle (32,8).
Per una trottola simmetrica, in cui I1 = I2 ≠ I3 , si trova dopo alcune semplificazioni:
T rot=I 1
22sin 22
I 3
2cos2 . (35,2)
Notiamo che si può ottenere questa espressione più semplicemente utilizzando il fatto che la scelta delle direzioni degli assi principali d'inerzia x1 , x2 di una trottola simmetrica è arbitraria. Conside-rando l'asse x1 coincidente con l'asse dei nodi ON, quindi ψ = 0 , avremo per le componenti della velocità angolare le espressioni più semplici
1= , 2=sin , 3=cos . (35,3)
Come esempio di applicazione degli angoli di Eulero, determiniamo con l'aiuto di queste espressioni il moto libero di una trottola simmetrica, che conosciamo già.
Scegliamo l'asse Z del sistema di coordinate fisso nella direzione del momento costante M della trottola. L'asse x3 del sistema mobile è diretto secondo l'asse della trottola, e supponiamo che l'asse x1 coincida all'istante considerato con l'asse dei nodi [quindi ψ = 0]. Le formule (35,3) ci danno allo-ra per le componenti del vettore M:
M 1=I 11=I 1 , M 2= I 12=I 1 sin , M 3=I 33=I 3 cos.
D'altra parte, poiché l'asse x1 (linea nodale) è perpendicolare all'asse Z [quindi x1 è perpendicolare al piano x2 Z x3] abbiamo:
M1 = 0 , M2 = M sin θ , M3 = M cos θ.Confrontando queste espressioni, otteniamo le equazioni seguenti:
=0, I 1=M , I 3cos=M cos . (35,4)
La prima di queste equazioni dà θ = cost , vale a dire che l'angolo di inclinazione dell'asse della trottola rispetto alla direzione di M è costante. La seconda definisce (in accordo con la (33,5)) la ve-
locità angolare di precessione =MI 1
. Infine la terza determina la velocità angolare di rotazione
della trottola attorno al suo asse Ω3 = M cos θ/I3 . [si ricava anche la costanza di ]
Problemi
1. Ridurre alle quadrature il problema del moto di una trottola simmetrica pesante la cui punta è im-mobile (Fig. 48).
Soluzione. Poniamo l'origine comune dei sistemi di coordinate fisso e mobile nella punta O della trottola, e l'asse Z secondo la verticale (Fig. 48). La funzione di Lagrange della trottola nel campo della gravità è
L=I 1 l 2
222sin 2
I 3
2cos2− g l cos
20
(essendo μ la massa della trottola, e l la distanza della punta dal centro d'inerzia).
Le coordinate ψ e φ sono cicliche. Abbiamo di conseguenza due integrali primi
p=∂ L∂
=I 3cos=cost≡M 3 , (1)
p=∂ L∂
= I ' 1sin 2I 3cos2I 3cos=cost≡M z , (2)
dove I'1 = I1 + μl2 (le grandezze pψ e pφ sono le componenti del momento di rotazione, definito ri-spetto al punto O, secondo gli assi x3 e Z rispettivamente). Inoltre si ha la conservazione dell'ener-gia
E=I ' 1
222 sin2
I 3
2cos2g l cos . (3)
Le equazioni (1) e (2) forniscono:
=M z−M 3cos
I ' 1sin 2, =
M 3
I 3−cos
M z−M 3 cosI ' 1sin 2
. (4) (5)
Eliminando e dall'energia (3) servendoci di queste uguaglianze, otteniamo
E '=I ' 1
22U eff , [ 2=
2E '−U eff I ' 1
]
in cui
E '=E−M 3
2
2 I 3−g l , U eff =
M z−M 3cos 2
2 I ' 1 sin2− g l 1−cos. (6)
Ricavando e separando le variabili, si ottiene:
t=∫ d
2I ' 1E '−U eff
(7)
21
(che è un integrale ellittico). Gli angoli φ e ψ si esprimono allora come funzioni di θ mediante qua-drature tramite le equazioni (4) e (5).
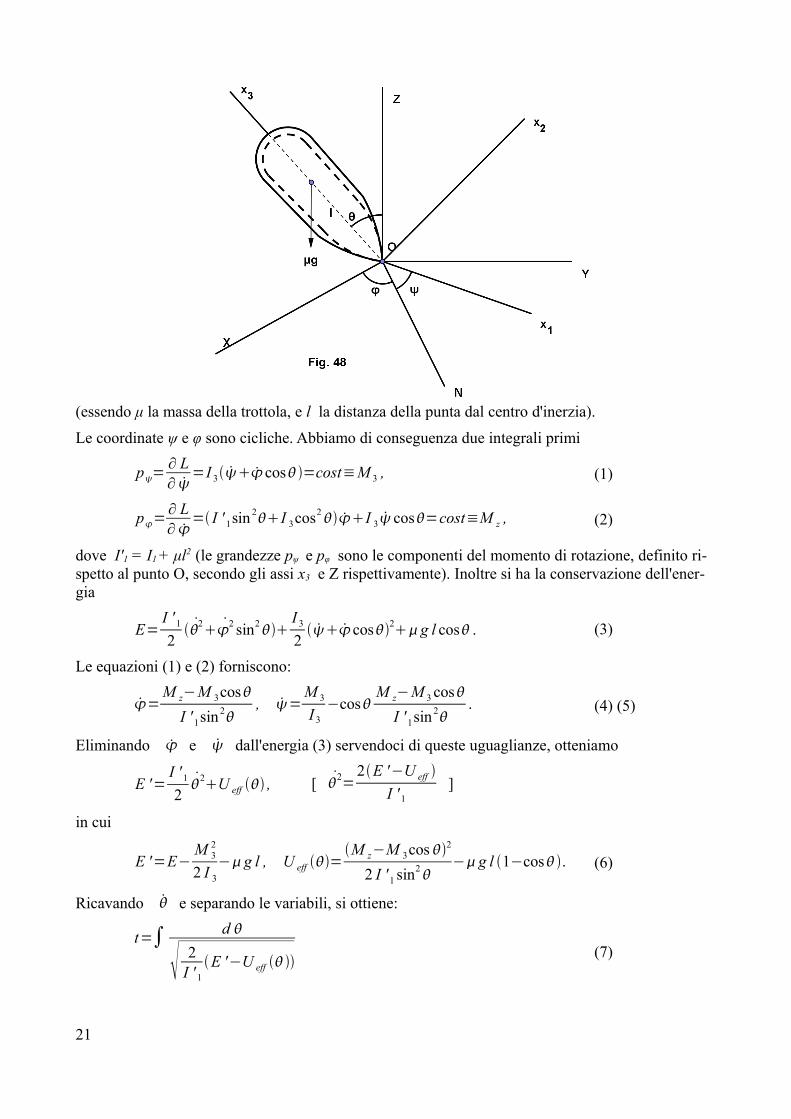
Il campo di variazione dell'angolo θ durante il moto è definito dalla condizione E' ≥ Ueff (θ). La fun-zione Ueff (θ) (per M3 ≠ Mz) tende verso +∞ per θ = 0 e θ = π e passa per un minimo nell'intervallo compreso fra questi due valori. L'equazione E' = Ueff (θ) ha pertanto due radici che determinano gli angoli limite θ1 e θ2 dell'inclinazione dell'asse della trottola sulla verticale.
Fig. 49
Quando l'angolo θ varia da θ1 a θ2 , il segno della derivata rimane immutato oppure varia, a se-conda che rimanga immutato o vari il segno della differenza Mz – M3 cos θ. Nel primo caso l'asse della trottola è animato da un moto di precessione monotòno attorno alla verticale, effettuando nello stesso tempo delle oscillazioni (moto di nutazione) dal basso all'alto (Fig. 49 a: la linea ondulata rappresenta la traccia che lascerebbe l'asse della trottola sulla superficie di una sfera con centro nella punta della trottola). Nel secondo caso la direzione della precessione è opposta sui due cerchi limite, in modo che l'asse della trottola si sposta attorno alla verticale descrivendo degli anelli (Fig. 49 b). Infine, se uno dei due valori θ1 , θ2 coincide con lo zero della differenza Mz – M3 cos θ , sul cer-chio limite corrispondente e si annullano contemporaneamente, in modo che l'asse della trottola descrive la traiettoria rappresentata in Fig. 49 c.
2. Trovare la condizione per cui la rotazione della trottola attorno ad un asse verticale risulta stabi-le.
Soluzione. Per θ = 0 gli assi x3 e Z coincidono, per cui M3 = Mz , E' = 0. La rotazione attorno a que-sto asse sarà stabile se il valore θ = 0 corrisponde ad un minimo della funzione Ueff (θ). Per piccoli valori di θ si ha: [sviluppando in serie la (6) del Problema 1 e assumendo cos θ ≈1]
U eff≃ M 32
8 I ' 1−g l
2 2 , [minimo in θ = 0 se il coefficiente di θ2 è positivo]
da cui la condizione cercata: M32 > 4I'1 μgl , cioè:
32
4 I ' 1g lI 3
2 . [essendo M3 = I3Ω3]
3. Determinare il moto di una trottola nel caso in cui l'energia cinetica di rotazione propria sia gran-de rispetto all'energia del campo della gravità (caso detto della “trottola veloce”).
Soluzione. In prima approssimazione, se si trascura il campo della gravità, si produce una preces-sione libera dell'asse della trottola attorno alla direzione del momento M (corrispondente nel caso in questione alla nutazione [nulla] della trottola); [dall'equazione (34,3) si ha infatti M = cost essendo K = 0] questa precessione in accordo alla (33,5) avviene alla velocità angolare
22
nut=MI ' 1
. [da leggersi prec=MI ' 1
] (1)
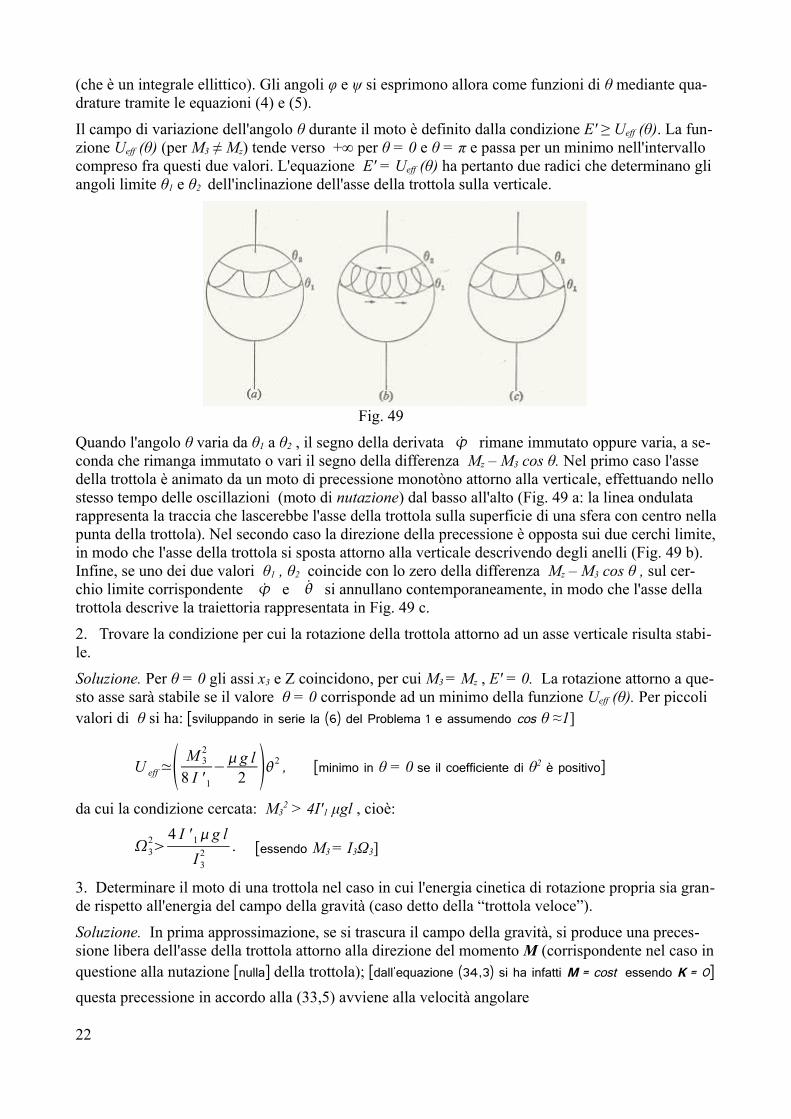
In seconda approssimazione compare una precessione lenta del momento M attorno alla verticale (Fig. 50). Per determinare la velocità di questa precessione calcoliamo la media, per un periodo del-
la nutazione, dell'equazione esatta del moto (34,3)d Md t
=K .
Il momento delle forze di gravità che agiscono sulla trottola è K = μl(n3 x g) dove n3 è il vettore unitario dell'asse della trottola. Delle considerazioni di simmetria evidenziano che il calcolo della media di K per il “cono di nutazione” conduce a sostituire il vettore n3 con la sua proiezione
cos ⋅MM su di M (essendo α l'angolo tra M e l'asse della trottola). Si ottiene così l'equazione
d Md t
=−cos lM g×M . [ = Ω x M secondo le formule di Poisson e la (36,1)]
Ciò significa che il vettore M è animato di un moto di precessione attorno alla direzione di g (verticale) con una velocità angolare media
pr=− l cos
Mg (2)
(piccola in rapporto a Ωnut).
Nell'approssimazione considerata, le grandezze M e cosα presenti nelle formule (1) e (2) sono delle costanti (pur non essendo, a rigore, degli integrali primi). Esse sono legate nella stessa approssimazione alle grandezze strettamente conservative E e M3 dalle relazioni
M 3=M cos , E≃M 2
2 cos2I 3
sin 2I ' 1 .
[Nel caso in cui si trascura del tutto la forza peso, si ricade nel caso del § 35 (moto per inerzia della trottola simmetrica), in cui, in base alle (35,4), =0 , θ = cost , cioè non vi è nutazione. Nel secondo caso,
essendo E=M 1
2M 22
2 I ' 1
M 32
2 I 3mgl cos , si ricava M 1
2M 22=I ' 12 E−
M 32
I 3−2m g l cos ,
23

M 2=M 12M 2
2M 32=2 I ' 1E−m g l cos1− I ' 1
I 3 M 32. Si ha allora:
cos=M 3
M= 1
2 I ' 1 EM 3
2 −I ' 1
I 3−
2g l I ' 1
M 32 cos1
; nell'ipotesi che la velocità di rotazione propria della
trottola sia molto elevata, il 3° termine sotto radice diventa trascurabile e il cos α risulta praticamente costante, condizione questa, come già precedentemente osservato, che si abbia un moto di precessione attorno alla
direzione di M. L'energia totale della trottola vale allora E≃M 1
2M 22
2 I ' 1
M 32
2 I 3
, da cui l'espressione finale
del testo, essendo ∣M 1M 2∣=M sin . ]
§ 36. Equazioni di Eulero
Le equazioni del moto scritte al § 34 sono riferite ad un sistema di coordinate fisso: le derivate dP/dt e dM/dt nelle equazioni (34,1) e (34,3) rappresentano le variazioni dei vettori P e M rispetto a questo sistema. Tuttavia è in un sistema di coordinate mobile, i cui assi sono diretti secondo gli assi principali d'inerzia, che si ha la relazione più semplice tra le componenti del momento di rota-zione M del solido e quelle della velocità angolare. Per poter utilizzare questa relazione, occorre preventivamente trasformare le equazioni del moto in un sistema mobile di coordinate x1, x2, x3 .
Sia dA/dt la velocità di variazione di un vettore A rispetto al sistema fisso. Se in un sistema che ruota, il vettore A non cambia, la sua variazione relativa al sistema fisso sarà dovuta unicamente alla rotazione, e si avrà allora
d Adt=×A
(ved. § 9, dove si è mostrato che formule come le (9,1) e (9,2) sono valide per ogni vettore). Nel caso generale, bisogna aggiungere al secondo membro di questa uguaglianza la velocità di variazione del vettore A rispetto al sistema mobile; indicando con d'A/dt questa velocità, si ottiene:
d Ad t= d ' A
d t×A . (36,1)
Con l'aiuto di questa formula generale, possiamo riscrivere subito le equazioni (34,1) e (34,3) nella forma
d ' Pd t
×P=F , d ' Md t
×M=K . (36,2)
Poiché la derivazione rispetto al tempo è qui effettuata nel sistema mobile, noi possiamo proiettare direttamente le equazioni sugli assi di questo sistema, scrivendo
d ' Pd t 1=
d P1
d t,.... ,d ' M
d t 1=d M 1
d t, ..... ,
dove gli indici 1, 2, 3 indicano le componenti sugli assi x1, x2, x3 . Fatto ciò, sostituiamo nella prima equazione P con μV e otteniamo:
24

d V 1
d t2V 3−3 V 2=F 1 ,
d V 2
d t3V 1−1 V 3=F 2 , [ ×P=∣n1 n2 n3
1 2 3
V 1 V 2 V 3∣ ] (36,3)
d V 3
d t1 V 2−2V 1=F 3.
Scegliendo gli assi x1, x2, x3 in modo tale che coincidano con gli assi principali d'inerzia, scriviamo nella 2° equazione (36,2) M1 = I1Ω1 , ecc. e otteniamo:
I 1
d1
d t I 3− I 223=K 1 ,
I 2
d2
d t I 1−I 331=K2 , [ ×M=∣ n1 n2 n3
1 2 3
I 11 I 22 I 33∣ ] (36,4)
I 3
d3
d t I 2−I 112=K3 .
Le equazioni (36,4) sono chiamate equazioni di Eulero.Per una rotazione libera, K = 0 , di conseguenza le equazioni di Eulero prendono la forma
d1
d t
I 3− I 2
I 123=0,
d2
d t
I 1−I 3
I 231=0, (36,5)
d3
d t
I 2−I 1
I 313=0.
A titolo di esempio, applichiamo queste equazioni alla rotazione [libera] della trottola simmetri-
ca, che abbiamo studiato precedentemente. Ponendo I1 = I2 , la terza equazione dà 3=0, cioè Ω3 = cost. Scriviamo poi le due prime equazioni nella forma
1=−2 , 2=1 ,
dove abbiamo introdotto la grandezza costante
=3
I 3− I 1
I 2. (36,6)
Moltiplicando la seconda equazione per i e sommandola alla prima, si ha:dd t1i2=i1i2 ,
da cui 1i2=A ei t , dove A è costante; la si può considerare come reale (ciò corrisponde a scegliere opportunamente l'origine dei tempi), e si ha allora
1=A cos t , 2=Asin t. (36,7)
25

Questo risultato fa vedere che la proiezione della velocità angolare su un piano perpendicolare all'asse della trottola ruota in questo piano con una velocità angolare ω, pur rimanendo costante in modulo ( 1
222=A ). Poiché la proiezione di Ω3 sull'asse della trottola è anch'essa costante,
concludiamo che il vettore Ω nel suo complesso ruota uniformemente attorno all'asse della trottola con una velocità angolare ω , mentre il suo modulo resta invariato. Tenuto conto delle relazioni M1 = I1Ω1 , M2 = I2Ω2 , M3 = I3Ω3 tra le componenti dei vettori Ω e M , è evidente che il vettore momento M effettua lo stesso moto (rispetto all'asse della trottola).
Va da sé che il quadro così ottenuto rappresenta semplicemente un altro aspetto del moto della trottola già studiato nei §§ 33 e 35 rispetto ad un sistema di coordinate fisso. In particolare, la velo-cità angolare di rotazione del vettore M (asse Z in Fig. 48) attorno alla direzione di x3 espressa in funzione degli angoli di Eulero coincide con la velocità angolare − . Le equazioni (35,4) ci danno:
=M cosI 3
−cos=M cos 1I 3− 1
I 1 [ M cosθ = M3 = Ω3I3 ]
oppure
−=3
I 3−I 1
I 1,
in accordo con la (36,6).
§ 37. Trottola asimmetrica
Utilizziamo le equazioni di Eulero nel problema più complesso della rotazione libera di una trottola asimmetrica, i cui tre momenti d'inerzia sono tra loro diversi. Per fissare le idee, porremo
I3 > I2 > I1 . (37,1)
Due integrali delle equazioni di Eulero sono noti inizialmente. Essi sono dati dalle leggi di con-servazione dell'energia e del momento e sono espressi dalle uguaglianze:
I1Ω12 + I2Ω2
2 + I3Ω32 = 2E, I1
2Ω12 + I2
2Ω22 + I3
2Ω32 = M2 (37,2)
in cui l'energia E e il valore assoluto M del momento sono delle costanti assegnate. Queste stesse uguaglianze espresse in funzione delle componenti del vettore M si scrivono
M 12
I 1
M 22
I 2
M 32
I 3=2 E , (37,3)
M 12M 2
2M 32=M 2 . (37,4)
Si possono già trarre alcune conclusioni circa il carattere del moto della trottola. Notiamo a questo proposito che geometricamente, sugli assi M1 , M2 , M3 , le equazioni (37,3) e (37,4) rappre-sentano rispettivamente le equazioni della superficie di un ellissoide di semiassi
2 E I 1 , 2 E I 2 , 2 E I 3
e di una sfera di raggio M. Quando il vettore M si sposta (rispetto agli assi d'inerzia della trottola), la sua estremità si muove lungo l'intersezione delle superficie in questione (la Fig. 51 rappresenta un certo numero di queste intersezioni dell'ellissoide con sfere di differenti raggi). L'esistenza stessa di
26

Fig. 51
una intersezione è resa possibile dalle disuguaglianze evidenti
2EI1 < M2 < 2EI3 , (37,5)
che esprimono geometricamente il fatto che il raggio della sfera (37,4) è compreso tra il minore e il maggiore dei semiassi dell'ellissoide (37,3).
Seguiamo il cambiamento di forma di queste “traiettorie” dell'estremità del vettore M1, man mano che varia il suo valore M (per una data energia E). Quando M 2 è solo leggermente più grande di 2EI1 , la sfera taglia l'ellissoide secondo due piccole curve chiuse che circondano l'asse x1 in pros-simità dei due poli corrispondenti dell'ellissoide (quando M 2 →2EI1 , tali curve tendono a confon-dersi con i poli). Man mano che M 2 cresce, le curve si allargano, e per M 2 =2EI2 si riducono a due curve piane (ellissi) che si tagliano nei vertici dell'asse x2 . Quando M 2 continua a crescere, appaio-no nuovamente delle traiettorie chiuse distinte, ma che circondano questa volta i vertici dell'asse x3 ; esse si riducono a questi due punti quando M 2 →2EI3 .
Notiamo fin d'ora che il fatto che le traiettorie siano chiuse significa che lo spostamento del vet-tore M rispetto al corpo della trottola è periodico; nel corso di un periodo il vettore M , ritornando nella sua posizione iniziale, descrive una superficie conica.
Notiamo inoltre il carattere essenzialmente differente delle traiettorie prossime ai diversi vertici dell'ellissoide. In prossimità degli assi x1 e x3 le traiettorie circondano completamente i vertici, ma quelle che passano in prossimità dei vertici dell'asse x2 si svolgono poi ad una grande distanza da questi punti. Questa differenza attiene alla diversa stabilità della rotazione della trottola attorno ai suoi assi d'inerzia. La rotazione attorno agli assi x1 e x3 (corrispondente al maggiore e al minore dei tre momenti d'inerzia della trottola) è stabile nel senso che per una piccola perturbazione di que-sti stati, la trottola continuerà ad effettuare un moto vicino al moto iniziale. Per contro, la rotazione attorno all'asse x2 è instabile; un piccolo scarto basta a provocare un movimento che porta la trottola lontano dalla sua posizione iniziale.
[Uno studio più accurato delle traiettorie si può fare scrivendo l'equazione dell'ellissoide x2
a2y2
b2z2
c2=1,
(dove x = M1 , y = M2 , z = M3 , a2 = 2EI1 , b2 = 2EI2 , c2 = 2EI3 ) in forma parametrica: x = a sin cos , y = b sin sin , z = c cos θ φ θ φ θ ; imponendo poi la distanza M dall'origine si ha:
a2 sin2 cosθ 2 + bφ 2sin2 sinθ 2 + cφ 2cos2 = Mθ 2, da cui si ricava: cos2=M 2−b2b2−a2cos2c2−b2b2−a2 cos2
,
1 Le analoghe curve descritte dall'estremità del vettore Ω sono chiamate poloidi.
27

sin2=c2−M 2
c2−b2b2−a2cos2, e infine l'equazione parametrica della curva intersezione:
x=acos c2−M 2
c2−b2b2−a2cos2, y=b sin c2−M 2
c2−b2b2−a2cos2,
z=±cM 2−b2b2−a2cos2c2−b2b2−a2cos2
. Se M = a, l'esistenza di z impone che sia cos2 = 1φ , quindi
y = z = 0 e x = ± a; se M = c, x = y = 0 e z = ± c. Le curve in questione sono generalmente sghembe, co- me si vede sostituendo le coordinate di cui sopra nell'equazione di un generico piano αx + βy + γz + δ = 0:
acosb sinc2−M 2± cM 2−b2b2−a2cos2c2−b2b2−a2cos2=0 ; se però M = b, allora si ha ac2−b2±c b2−a2cosbc2−b2sinc2−b2b2−a2cos2=0 e si vede che
l'equazione è soddisfatta per ogni φ se si pone ==0, ac2−b2± cb2−a2=0 ; in tal caso si ottengono due curve appartenenti ai piani c b2−a2 x±a c2−b2 z=0 aventi in comune l'asse y. Interse-cando l'ellissoide con tali piani si trovano equazioni quadratiche ed è facile riconoscere le curve in questione come ellissi.]
Per determinare la relazione tra le componenti di Ω (o quelle di M che sono proporzionali alle precedenti) e il tempo, ritorniamo alle equazioni di Eulero (36,5). Esprimiamo Ω1 e Ω3 in funzione di Ω2 mediante le equazioni (37,2) e (37,3)
12= 1
I 1 I 3−I 1{2 E I 3−M 2− I 2 I 3−I 22
2} ,
32= 1
I 3 I 3−I 1{M 2−2 E I 1− I 2 I 2−I 12
2} (37,6)
e inserendole nella seconda delle equazioni (36,5), troviamo:d2
d t=
I 3−I 1
I 213=
1I 2 I 1 I 3
{[2E I 3−M 2−I 2 I 3−I 222][M 2−2 E I 1− I 2 I 2− I 12
2]}1 /2 .
(37,7)
Separando le variabili ed integrando, otteniamo una funzione t(Ω2) sotto forma di un integrale ellit-tico. Per ridurlo alla forma standard, porremo per fissare le idee
M2 > 2 EI2
(in caso contrario bisogna invertire gli indici 1 e 3 in tutte le formule che seguono). Al posto di t e Ω2 consideriamo le nuove variabili
=t I 3−I 2M2−2 E I 1
I 1 I 2 I 3, s=2 I 2 I 3− I 2
2 E I 3−M 2 (37,8)
e facciamo intervenire il parametro positivo1 k2 > 1 dato da
1 Chiamato modulo delle funzioni ellittiche definite successivamente.
28

k 2= I 2−I 12 E I 3−M 2
I 3− I 2M2−2 E I 1
. (37,9)
Otteniamo allora
=∫0
s d s1−s21−k 2 s2
(conveniamo di scegliere l'origine dei tempi in modo che Ω2 = 0 per t = 0). La funzione inversa s(τ) costituisce, come è noto, una delle funzioni ellittiche di Jacobi:
s = sn τ , [seno amplitudine]che determina Ω2 in funzione del tempo. Le funzioni Ω1(t) e Ω3(t) si esprimono algebricamente per mezzo di Ω2(t) in base alle uguaglianze (37,6). Partendo dalla definizione delle altre due funzioni el-littiche [rispettivamente il coseno amplitudine e il delta amplitudine]
cn=1−sn2 , dn=1−k 2 sn2 ,
otteniamo alla fine le formule seguenti
1= 2 E I 3−M 2
I 1 I 3−I 1cn , 2= 2 E I 3−M 2
I 2 I 3−I 2sn , 3=M 2−2 E I 1
I 3 I 3−I 1dn . (37,10)
Le funzioni (37,10) sono periodiche, con un periodo rispetto alla variabile τ che è, come noto, uguale a 4K , dove K è l'integrale ellittico completo di prima specie
K=∫0
1 d s 1−s21−k 2 s2
= ∫0
/2 d u1−k2 sin2 u
. (37,11)
Il periodo rispetto al tempo è pertanto dato dall'espressione
T=4 K I 1 I 2 I 3
I 3−I 2M2−2 E I 1
. (37,12)
Al termine di questo intervallo di tempo il vettore Ω ritorna nella sua posizione iniziale rispetto agli assi della trottola. (Ciò che non significa affatto che la trottola stessa ritorna nella sua posizione ini-ziale rispetto al sistema di coordinate fisse; ved. nel seguito.)
Per I1 = I2 le formule (37,10) si riducono evidentemente alle formule ottenute nel paragrafo precedente per la trottola simmetrica. Infatti, quando I1 → I2 il parametro k2 → 0 e le funzioni ellit-tiche degenerano, riducendosi a funzioni circolari
sn τ → sin τ , cn τ → cos τ , dn τ → 1 ,e ritroviamo le formule (36,7).
Per M2 = 2EI3 si ha Ω1 = Ω2 = 0, Ω3 = cost , cioè il vettore Ω è costantemente diretto lungo l'as-se d'inerzia x3 ; questo caso corrisponde ad una rotazione uniforme della trottola attorno all'asse x3 . Allo stesso modo, per M2 = 2EI1 (per cui τ ≡ 0) si ha ancora una rotazione permanente attorno al-l'asse x1 .
Determiniamo ora in funzione del tempo il moto assoluto della trottola nello spazio (assoluto in rapporto al sistema fisso X, Y, Z). Utilizziamo a questo scopo gli angoli di Eulero ψ, φ, θ tra gli assi della trottola x1, x2, x3 e gli assi X, Y, Z scegliendo l'asse fisso Z parallelo al vettore costante M. Poi-ché l'angolo polare e l'azimut della direzione di Z rispetto agli assi x1, x2, x3 sono rispettivamente
29

uguali a θ e π/2 – ψ (ved. nota 2 § 35), si ottiene proiettando il vettore M sugli assi x1, x2, x3 :
M sinθ sinψ = M1 = I1Ω1, M sinθ cosψ = M2 = I2Ω2 , M cosθ = M3 = I3Ω3 (37,13)
Si ricava
cos=I 33
M, tg=
I 11
I 22, (37,14)
e, tenuto conto delle formule (37,10):
cos= I 3M2−2 E I 1
M 2 I 3−I 1dn , tg= I 1 I 3−I 2
I 2 I 3− I 1cnsn
, (37,15)
formule che determinano θ e ψ in funzione del tempo; sono, con le componenti del vettore Ω, fun-zioni periodiche con periodo (37,12).
L'angolo φ non interviene nelle formule (37,13), e per calcolarlo bisogna tornare alle formule (35,1), che esprimono le componenti di Ω in funzione delle derivate degli angoli di Eulero rispetto al tempo. Eliminando dalle uguaglianze
1=sinsincos , 2=sincos−sin ,
otteniamo
=1sin2 cos
sin,
e le formule (37,13) ci danno allora
d d t=M
I 112 I 22
2
I 121
2 I 222
2 . (37,16)
Di qui la funzione φ(t) si determina con una quadratura, ma l'espressione sotto il segno di integrale contiene le funzioni ellittiche in forma complessa. Attraverso un certo numero di trasformazioni piuttosto complicate, si può esprimere questo integrale per mezzo della funzione detta “funzione theta”. Senza svolgere i calcoli, ci limitiamo ad indicare il risultato.
La funzione φ(t) si può rappresentare (a meno di una costante additiva arbitraria) con una som-ma di due termini
φ(t) = φ1(t) + φ2(t) , (37,17)
di cui uno è dato dalla formula
e2 i1 t =012 t
T−i
012 tTi
, (37,18)
dove ϑ01 è la funzione theta, e α una costante reale definita dall'uguaglianza
sni 2 K =i I 3M2−2 E I 1
I 12 E I 3−M 2(37,19)
(K e T sono dati dalle (37,11) e (37,12)). La funzione nel secondo membro della (37,18) è periodica di periodo T/2 , per cui φ1(t) varia di 2π durante il tempo T . Il secondo termine della (37,17) è dato dalla formula
30

2t =2 tT '
, 1T '= M
2 I 1− iT
' 01i01i
. (37,20)
Questa funzione cresce di 2π durante il tempo T'. Così il moto secondo l'angolo φ si presenta come l'insieme di due variazioni periodiche; uno dei periodi (T) coincide col periodo di variazione degli angoli ψ e θ , e l'altro (T ') non è commensurabile col precedente. Quest'ultima circostanza implica che la trottola non ritorna mai rigorosamente nella sua posizione iniziale.
Problemi
1. Determinare la rotazione libera di una trottola attorno ad un asse prossimo all'asse d'inerzia x3
(oppure x1 ).
Soluzione. Supponiamo l'asse x3 prossimo alla direzione di M . Le componenti M1 e M2 sono allora piccole, e la componente M3 ≈ M (a meno di infinitesimi del primo ordine). Con la stessa approssi-mazione le prime due equazioni di Eulero (36,5) si scrivono
d M 1
d t=1− I 3
I 2 0 M 2 ,d M 2
d t= I 3
I 1−10 M 1 ,
dove abbiamo introdotto la costante Ω0 = M/I3 . [quindi Ω0 ≈ Ω3] Seguendo la regola generale, cer-
chiamo per M1 e M2 una soluzione proporzionale a eiωt [visto che il sistema di equazioni differenziali è li-neare] e otteniamo per la frequenza ω il valore [annullando il determinante dei coefficienti del sistema omogeneo in M1 e M2 ]
=0 I 3
I 1−1 I 3
I 2−1. (1)
Per M1 e M2 otteniamo
M 1=M a I 3
I 2−1 cos t , M 2=M a I 3
I 1−1 sin t , (2)
dove a è una costante arbitraria piccola. [il vettore M1 + M2 descrive quindi una ellisse nel piano x1 x2 con frequenza ω] Queste formule determinano il moto del vettore M rispetto alla trottola; nella costruzio-ne della Fig. 51, l'estremità del vettore M descrive (con frequenza ω) una piccola ellisse attorno al vertice dell'asse x3 .
Per determinare il moto assoluto della trottola nello spazio, calcoliamone gli angoli di Eulero. Nel caso considerato l'angolo di inclinazione θ dell'asse x3 sull'asse Z (direzione di M) è piccolo, e in base alle formule (37,4) si ha
tg=M 1
M 2, 2≃21−cos =21−M 3
M ≃M 12M 2
2
M 2 ;
[ 1−M 3
M≃1−1−
M 12M 2
2
M 2 ≃1−1M 1
2M 22
2 M 2] tenendo conto della (2), otteniamo
31

tg= I 1 I 3−I 2I 2 I 3−I 1
ctg t , 2=a2[ I 3
I 2−1cos2 t I 3
I 1−1sin 2 t ]. (3)
[la 2° uguaglianza rappresenta un moto di nutazione di frequenza 2ωt tra gli estremi a ∣ I 3
I 1−1∣ e
a ∣ I 3
I 2−1∣ ] Per calcolare l'angolo φ osserviamo che in base alla terza delle formule (35,1) e per
θ << 1:0≃3≃ .
Di conseguenza,
φ = Ω0 t – ψ (4)
(dove si è tralasciata la costante d'integrazione).
Si otterrà una rappresentazione più concreta del carattere del moto della trottola seguendo diretta-mente i cambiamenti di direzione dei suoi tre assi d'inerzia (indicheremo con n1 , n2 , n3 i vettori unitari lungo questi tre assi). I vettori n1 e n2 ruotano uniformemente nel piano XY con la frequenza Ω0 effettuando nello stesso tempo delle piccole oscillazioni trasversali di frequenza ω ; [infatti] tali oscillazioni sono definite dalle componenti su Z dei vettori in questione, per i quali abbiamo
n1Z≃M 1
M=a I 3
I 2−1 cos t , n2Z≃
M 2
M=a I 3
I 1−1 sin t .
Per il vettore n3 si ha con la stessa approssimazione: [n3x = sin θ sin φ ≈ θ sin φ ecc.]n3x≃sin , n3 y≃−cos , n3 z≃1
(l'angolo polare e l'azimut della direzione di n3 rispetto agli assi X, Y, Z sono uguali a θ e φ – π/2; ved. nota 2, § 35). Scriviamo inoltre (utilizzando le formule (37,13)):
n3x=sin 0t−= sin0 t cos− cos0t sin=M 2
Msin0t−
M 1
Mcos0 t =
= a I 3
I 1−1 sin0 t sin t−a I 3
I 2−1 cos0t cos t ,
cioè alla fine
n3x=−a2 I 3
I 1−1 I 3
I 2−1cos 0t
a2 I 3
I 1−1− I 3
I 2−1cos 0− t .
Allo stesso modo
n3 y=−a2 I 3
I 1−1 I 3
I 2−1sin 0t
a2 I 3
I 1−1− I 3
I 2−1sin 0−t .
Da qui è chiaro che il moto del vettore n3 si presenta come la sovrapposizione di due rotazioni di frequenze (Ω0 ± ω) attorno all'asse Z.
2. Determinare la rotazione libera di una trottola per M2 = 2EI2 . Soluzione. Nella costruzione della Fig. 51, questo caso corrisponde allo spostamento dell'estremità
32

del vettore M su una curva passante per il polo sull'asse x2 . L'equazione (37,7) prende la forma
d sd =1−s2 , =t I 2−I 1 I 3−I 2
I 1 I 30 , s=
2
0,
dove si è posto 0=MI 2= 2E
M. Integrando questa equazione, ed utilizzando poi le formule (37,6),
otteniamo [ponendo Ω2 = 0 per t = 0]
1=0 I 2 I 3−I 2I 1 I 3−I 1
1ch
, 2=0 th , 3=0 I 2 I 2− I 1I 3 I 3−I 1
1ch
.
Per descrivere il moto assoluto della trottola, facciamo intervenire gli angoli di Eulero, definendo θ come l'angolo formato dall'asse Z (direzione di M) e l'asse d'inerzia x2 della trottola (e non x3 come nel testo). Nelle formule (37,14) e (37,16) che legano le componenti del vettore Ω agli angoli di Eu-lero, bisogna perciò effettuare la permutazione di indici 123 → 312. Portando quindi in queste for-mule le espressioni (1), otteniamo
cos θ = th τ , φ = Ω0 t + cost , tg= I 3 I 2−I 1I 1 I 3−I 2
.
Le formule ottenute mostrano che il vettore Ω tende asintoticamente (quando t → ∞) verso l'asse x2 , che tende a sua volta asintoticamente all'asse Z. [Ω1 , Ω3 → 0 , Ω2 → Ω0 , cos θ → 1 ]
§ 38. Contatto dei corpi solidi
Come mostrano le equazioni del moto (34,1) e (34,3), si possono formulare le condizioni di equilibrio di un solido annullando la forza totale e il momento totale delle forze che agiscono su di esso:
F=∑ f=0, K=∑ r× f=0. (38,1)
La somma riguarda qui tutte le forze esterne applicate al corpo, e r rappresenta i raggi vettori dei “punti di applicazione” di queste forze; il punto (origine delle coordinate) rispetto al quale sono de-finiti i momenti può essere scelto arbitrariamente: per F = 0 , il valore di K non dipende da questa scelta (ved. (34,5)).
Se abbiamo a che fare con un sistema di corpi solidi a contatto tra di loro, si ha equilibrio quan-do le condizioni (38,1) sono soddisfatte per ognuno dei corpi separatamente. Si devono allora inclu-dere nelle le forze considerate quelle che agiscono sul corpo dato causate dagli altri corpi che sono in contatto con esso. Tali forze sono applicate nei punti di contatto dei corpi e sono chiamate reazio-ni vincolari. E' evidente che per ogni coppia di corpi, le reazioni vincolari reciproche sono uguali e di verso contrario.
Nel caso generale, i valori e le direzioni delle reazioni saranno determinate risolvendo il siste-ma delle equazioni di equilibrio (38,1) per ognuno dei corpi a turno. In certi casi, tuttavia, la dire-zione delle reazioni vincolari può essere fornita dalle condizioni stesse del problema. Così, se due corpi possono scorrere liberamente l'uno sulla superficie dell'altro, le reazioni vincolari saranno di-rette secondo la normale a detta superficie.
Se i corpi a contatto sono in movimento gli uni rispetto agli altri, appariranno, oltre alle reazioni vincolari, delle forze aventi carattere dissipativo: le forze di attrito.
33

Due tipi di moto sono possibili per i corpi a contatto: strisciamento e rotolamento. In caso di strisciamento, le reazioni sono perpendicolari alle superficie a contatto, e le forze di attrito dirette secondo le tangenti a queste superficie.
Il rotolamento puro è caratterizzato dal fatto che nei punti di contatto non c'è movimento dei corpi gli uni rispetto agli altri; in altri termini, il corpo che rotola è come fissato in ogni istante al punto di contatto. La direzione della forza di reazione è pertanto qualsiasi, cioè essa non è necessa-riamente perpendicolare alle superficie a contatto. Quanto allo strisciamento, si manifesta qui come un momento di forza supplementare, che si oppone al rotolamento.
Se, nel caso di strisciamento, l'attrito è sufficientemente piccolo perché lo si possa trascurare completamente, le superficie dei corpi si dicono perfettamente lisce. Per contro, se le proprietà su-perficiali dei corpi consentono solo un puro rotolamento, senza strisciamento, e se durante tale roto-lamento l'attrito si può trascurare, le superficie sono dette perfettamente rugose.
In questi due casi, le forze di attrito non compaiono esplicitamente nel problema del moto dei corpi, di modo che tale problema è puramente meccanico. [cioè sono coinvolte solo le equazioni del moto, ad es. di Lagrange, e non altri aspetti, ad es. termodinamici, come già osservato all'inizio del § 25] Il moto non sarà più un processo puramente meccanico se le proprietà reali dell'attrito vi giocano un ruolo essenziale (ved. § 25).
Il contatto dei corpi diminuisce il numero dei loro gradi di libertà, rispetto a quello posseduto per un moto libero. Fino ad ora, nello studio di questo genere di problema, abbiamo tenuto conto di questa circostanza facendo intervenire delle coordinate che corrispondevano direttamente al numero reale di gradi di libertà. Durante il rotolamento dei corpi tuttavia, una tale scelta delle coordinate si può rivelare impossibile.
La condizione da imporre al moto di rotolamento consiste nel fatto che le velocità dei punti di contatto devono essere uguali (così, per un corpo che rotola su una superficie immobile, la velocità del punto di contatto deve essere nulla). Nel caso generale questa condizione si esprime con delle equazioni di vincolo del tipo
∑i
c i q i=0, (38,2)
dove le cαi sono funzioni delle sole coordinate (l'indice α numera le equazioni di vincolo). Se i membri di sinistra di queste uguaglianze non sono delle derivate totali rispetto al tempo di funzioni delle coordinate, queste equazioni non si possono integrare. In altri termini, esse non si riducono a delle relazioni tra le sole coordinate che si possano utilizzare per esprimere la posizione dei corpi con un numero minore di coordinate corrispondenti al numero reale dei gradi di libertà. [cioè per di-minuire il numero delle coordinate indipendenti] Vincoli siffatti sono detti non olonomi (in contrapposi-zione ai vincoli detti olonomi che mettono tra loro in relazione solamente le coordinate del sistema).
Consideriamo ad esempio il rotolamento di una sfera su una superficie piana. Indichiamo come al solito con V la velocità del moto di traslazione (velocità del centro della sfera), e con Ω la veloci-tà angolare della sua rotazione. Si ottiene la velocità del punto di contatto della sfera e del piano po-nendo r = - an nella formula generale v = V + Ω x r (dove a è il raggio della sfera, e n il vettore unitario della normale al piano di rotolamento nel punto di contatto). Il legame cercato è rappresen-tato dalla condizione che vi sia strisciamento nel punto di contatto, quindi esso è dato dall'equazione
V−a ×n=0. (38,3)
Questa equazione non è integrabile: infatti, anche se la velocità V è la derivata totale rispetto al tempo del raggio vettore “centro della sfera”, la velocità angolare invece non è in generale la deriva-
34
ta totale di questa o quella coordinata. Di conseguenza il vincolo (38,3) è non olonomo1. [Nel caso
della sfera che rotola su un piano, si ha: ×n=∣ i j kx y z
0 0 1 ∣ ; la relazione (38,3) si può scrivere:
V x−ay=0, V yax=0, che mediante le (35,1) diventa V x−asin cos−sin=0, V ya sinsincos=0 . Questo sistema di equazioni
differenziali non è integrabile, quindi non è possibile ricavare alcuna relazione finita tra le variabili. Diverso è il caso di un cilindro che rotola su un piano (oppure un disco che rotola su una retta) per il quale, se xy è tale piano e l'asse del cilindro è diretto secondo y , si ha: V x−a =0, da cui xC−a=cost ed è stabilito un legame tra l'ascissa del centro C del cilindro e l'angolo di rotazione φ attorno all'asse.]
Poiché non si possono utilizzare le equazioni di vincoli non olonomi per ridurre il numero delle coordinate, quando si hanno vincoli di questo tipo, inevitabilmente si devono utilizzare delle coordi-nate non tutte indipendenti. Per stabilire le equazioni di Lagrange corrispondenti, torniamo al princi-pio di minima azione.
La presenza di legami del tipo (38,2) impone determinati limiti ai possibili valori delle variazio-ni delle coordinate. In particolare, moltiplicando queste equazioni per δt , si trova che le variazioni δqi non sono indipendenti, bensì legate da
∑i
c iqi=0. (38,4)
Bisogna tener conto di questa circostanza quando si dà una variazione all'azione. Secondo il metodo generale, dovuto a Lagrange, di ricerca delle condizioni di estremo, bisogna aggiungere all'espres-sione sotto il segno di somma della variazione dell'azione
S=∫∑iq i ∂L
∂ qi− d
d t∂ L∂ qi d t
le equazioni (38,4) moltiplicate per i fattori indeterminati λa (funzioni delle coordinate), poi imporre la condizione che l'integrale si annulli. [si tratta del cosiddetto metodo dei moltiplicatori di Lagrange, che consente di trovare i punti estremi (massimi o minimi) di una funzione di s variabili f (xi ) in presenza di α vin-coli gj (xi ) ; si deve risolvere il sistema ∂ f
∂ x i−∑
j
∂ g j
∂ xi=0 trovando i valori {x i} e { i} relativi ai
punti cercati, essendo j i moltiplicatori di Lagrange. Il metodo è applicabile anche per vincoli olonomi, ma in quel caso è in genere più conveniente risolvere separatamente il sistema delle equazioni di vincolo per de-terminare le variabili indipendenti in numero uguale ai gradi di libertà] Si possono allora considerare tutte le variazioni δqi come indipendenti e si ottengono le equazioni
dd t∂ L∂ qi− ∂L∂ qi=∑
c i . (38,5)
1 Osserviamo che per il rotolamento di un cilindro un tale vincolo sarebbe olonomo. In questo caso, l'asse di rotazione conserva una direzione costante, e quindi Ω = dφ/dt è una derivata totale dell'angolo φ di rotazione del cilindro attorno al suo asse. La relazione (38,3) è allora integrabile e fornisce il legame tra la coordinata del centro d'inerzia e l'angolo φ .
35

Con le equazioni di vincolo (38,2), esse costituiscono un sistema completo di equazioni nelle inco-gnite qi e λα .
Nel metodo che abbiamo testé esposto, le reazioni vincolari in genere non compaiono; il contat-to dei corpi è rappresentato globalmente dalle equazioni di vincolo. Esiste tuttavia, per stabilire le equazioni del moto dei corpi a contatto, un altro metodo che fa intervenire esplicitamente le reazioni vincolari. Questo metodo (che costituisce il principio di D'Alembert) consiste essenzialmente nello scrivere per ciascuno dei corpi a contatto le equazioni
d Pd t=∑ f , d M
d t=∑ r× f , (38,6)
in cui le reazioni vincolari sono incluse nell'insieme delle forze f che agiscono sul corpo; queste for-ze sono a priori incognite e saranno determinate assieme al moto del corpo una volta risolte le equa-zioni. Tale metodo è applicabile tanto per vincoli olonomi che per vincoli non olonomi.
Problemi
1. Utilizzando il principio di D'Alembert, trovare le equazioni del moto di una sfera omogenea che rotola su un piano sotto l'azione di una forza esterna F e di un momento di forza K .
Soluzione. L'equazione di legame (38,3) è già indicata nel testo. Facendo intervenire la reazione vincolare (indichiamola con R) applicata nel punto di contatto tra sfera e piano, scriviamo le equa-zioni (38,6):
d Vd t=FR (1) I d
d t=K−a n×R (2)
(tenuto conto qui che P = μV e che per una trottola sferica M = I Ω ). Derivando l'equazione di le-game (38,3) rispetto al tempo, otteniamo:
V=a ×n.
Portando questa equazione nell'equazione (1) ed eliminando con l'aiuto della (2), si trova:I
aFR=K×n−a Ra nn R ,
equazione che lega la reazione vincolare a F e K . Scrivendo questa equazione attraverso le compo-
nenti e sostituendovi I=25a2 (ved. problema 2b, § 32), si avrà
R x=5
7 aK y−
27
F x , R y=−5
7 aK x−
27
F y , R z=−F z
(si è scelto come piano xy il piano di rotolamento). Infine, portando queste espressioni nella (1), ot-teniamo le equazioni del moto contenenti solamente più la forza esterna e il momento dato:
d V x
d t= 5
7 F xK y
a , d V y
d t= 5
7 F y−K x
a .[ V z=0 V z=0 essendo il moto piano] Le componenti Ωx e Ωy della velocità angolare si esprimo-no in funzione di Vx e Vy per mezzo dell'equazione di legame (38,3), [Vx -aΩy = 0, Vy + aΩx = 0] e per Ωz si ha:
36
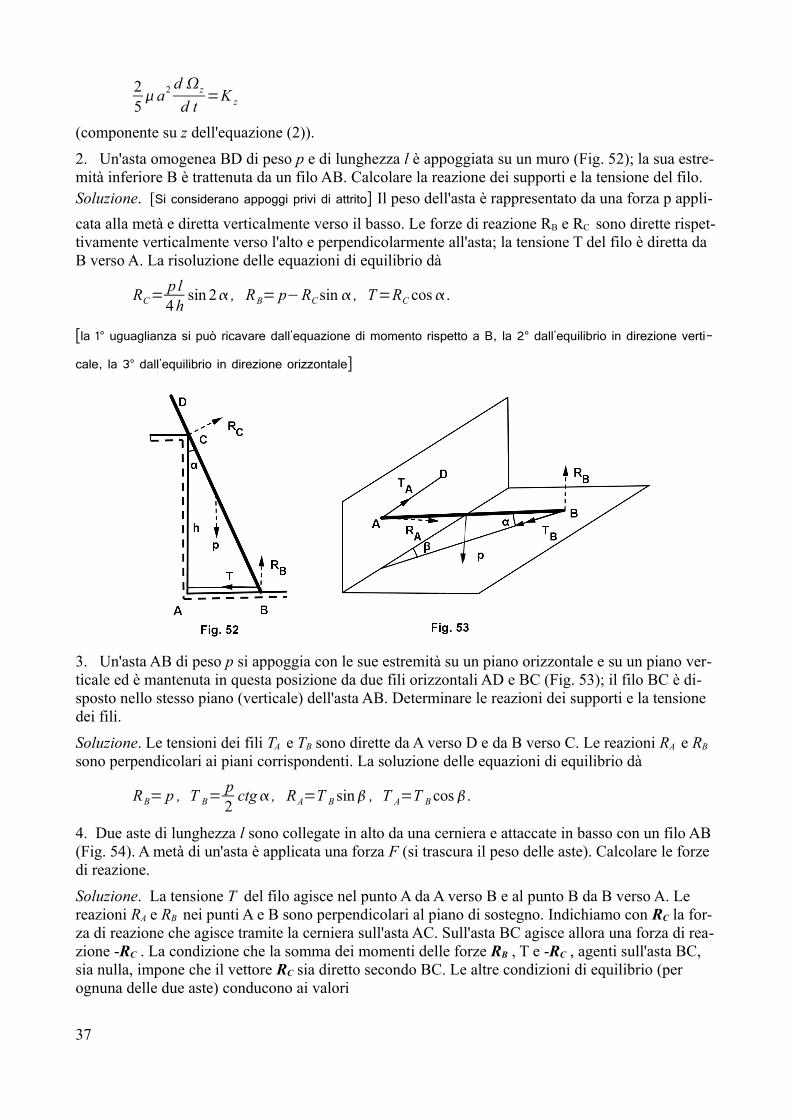
25a2 dz
d t=K z
(componente su z dell'equazione (2)).
2. Un'asta omogenea BD di peso p e di lunghezza l è appoggiata su un muro (Fig. 52); la sua estre-mità inferiore B è trattenuta da un filo AB. Calcolare la reazione dei supporti e la tensione del filo. Soluzione. [Si considerano appoggi privi di attrito] Il peso dell'asta è rappresentato da una forza p appli-cata alla metà e diretta verticalmente verso il basso. Le forze di reazione RB e RC sono dirette rispet-tivamente verticalmente verso l'alto e perpendicolarmente all'asta; la tensione T del filo è diretta da B verso A. La risoluzione delle equazioni di equilibrio dà
RC=p l4h
sin 2 , RB= p−RC sin , T=RC cos .
[la 1° uguaglianza si può ricavare dall'equazione di momento rispetto a B, la 2° dall'equilibrio in direzione verti-cale, la 3° dall'equilibrio in direzione orizzontale]
3. Un'asta AB di peso p si appoggia con le sue estremità su un piano orizzontale e su un piano ver-ticale ed è mantenuta in questa posizione da due fili orizzontali AD e BC (Fig. 53); il filo BC è di-sposto nello stesso piano (verticale) dell'asta AB. Determinare le reazioni dei supporti e la tensione dei fili.
Soluzione. Le tensioni dei fili TA e TB sono dirette da A verso D e da B verso C. Le reazioni RA e RB
sono perpendicolari ai piani corrispondenti. La soluzione delle equazioni di equilibrio dà
RB= p , T B=p2
ctg , RA=T B sin , T A=T B cos .
4. Due aste di lunghezza l sono collegate in alto da una cerniera e attaccate in basso con un filo AB (Fig. 54). A metà di un'asta è applicata una forza F (si trascura il peso delle aste). Calcolare le forze di reazione.
Soluzione. La tensione T del filo agisce nel punto A da A verso B e al punto B da B verso A. Le reazioni RA e RB nei punti A e B sono perpendicolari al piano di sostegno. Indichiamo con RC la for-za di reazione che agisce tramite la cerniera sull'asta AC. Sull'asta BC agisce allora una forza di rea-zione -RC . La condizione che la somma dei momenti delle forze RB , T e -RC , agenti sull'asta BC, sia nulla, impone che il vettore RC sia diretto secondo BC. Le altre condizioni di equilibrio (per ognuna delle due aste) conducono ai valori
37
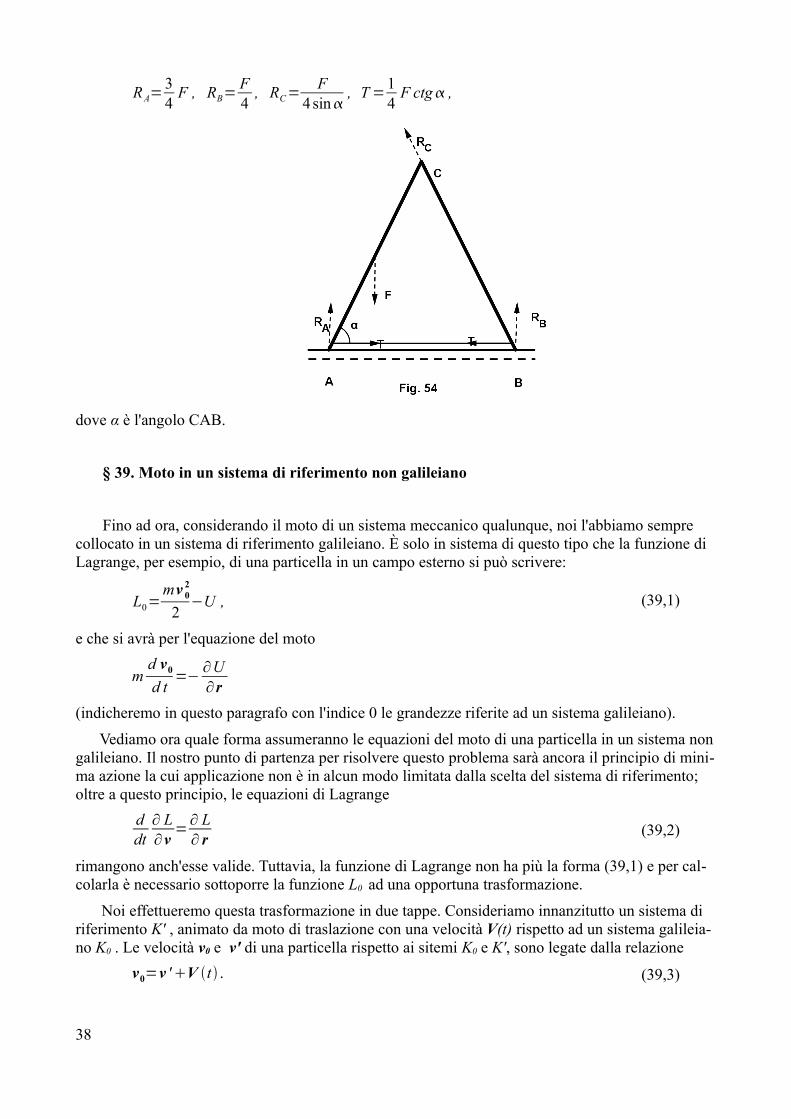
RA=34
F , RB=F4
, RC=F
4sin, T=1
4F ctg ,
dove α è l'angolo CAB.
§ 39. Moto in un sistema di riferimento non galileiano
Fino ad ora, considerando il moto di un sistema meccanico qualunque, noi l'abbiamo sempre collocato in un sistema di riferimento galileiano. È solo in sistema di questo tipo che la funzione di Lagrange, per esempio, di una particella in un campo esterno si può scrivere:
L0=mv 0
2
2−U , (39,1)
e che si avrà per l'equazione del moto
md v0
d t=− ∂U
∂r(indicheremo in questo paragrafo con l'indice 0 le grandezze riferite ad un sistema galileiano).
Vediamo ora quale forma assumeranno le equazioni del moto di una particella in un sistema non galileiano. Il nostro punto di partenza per risolvere questo problema sarà ancora il principio di mini-ma azione la cui applicazione non è in alcun modo limitata dalla scelta del sistema di riferimento; oltre a questo principio, le equazioni di Lagrange
ddt∂ L∂v=∂ L∂ r (39,2)
rimangono anch'esse valide. Tuttavia, la funzione di Lagrange non ha più la forma (39,1) e per cal-colarla è necessario sottoporre la funzione L0 ad una opportuna trasformazione.
Noi effettueremo questa trasformazione in due tappe. Consideriamo innanzitutto un sistema di riferimento K' , animato da moto di traslazione con una velocità V(t) rispetto ad un sistema galileia-no K0 . Le velocità v0 e v' di una particella rispetto ai sitemi K0 e K', sono legate dalla relazione
v0=v 'V t . (39,3)
38
Introdotta nella (39,1), questa espressione fornisce la funzione di Lagrange nel sistema K' :
L '=m v ' 2
2m v ' Vm
2V 2−U .
Ma V2 (t) è una funzione data del tempo. Essa può essere rappresentata come la derivata totale ri-spetto a t di un'altra funzione, e di conseguenza, si può omettere il terzo termine dell'espressione precedente. [ved. (2.8)] D'altra parte, v' = d r'/dt , dove r' è il raggio vettore della particella nel siste-ma di coordinate K'; di conseguenza,
m V t v '=m V d r 'd t= d
d tmV r ' −mr ' d V
d t.
Portando questo valore nella funzione di Lagrange e tralasciando di nuovo la derivata totale rispetto al tempo, otteniamo alla fine:
L '=m v ' 2
2−mW t r '−U , (39,4)
dove W = dV/dt è l'accelerazione del moto di traslazione del sistema K'. Stabiliamo con l'aiuto della (39,4) l'equazione di Lagrange; si ha
m d v 'd t=− ∂U
∂ r '−mW t . (39,5)
Si vede quindi che dal punto di vista della sua influenza sull'equazione del moto della particel-la, il moto di traslazione accelerato del sistema di riferimento è equivalente alla comparsa di un campo di forze omogeneo, essendo la forza che agisce in questo campo uguale al prodotto della massa della particella per l'accelerazione W e diretta nel senso contrario a tale accelerazione.
Introduciamo ora un altro sistema di riferimento K , avente la stessa origine del sistema K' ma in rotazione rispetto a quest'ultimo con una velocità angolare Ω(t) ; rispetto al sistema di riferimento K0 , il sistema K effettua allora contemporaneamente una traslazione ed una rotazione.
La velocità v' della particella relativa al sistema K' è composta dalla sua velocità v relativa al sistema K e della velocità Ω x r del moto di rotazione che essa effettua insieme al sistema K
v '=v×r
(i raggi vettori r e r' della particella nei sistemi K e K' coincidono). Introducendo questa espressio-ne nella funzione di Lagrange (39,4), otteniamo:
L=m v2
2m v ×r m
2×r 2−mW r−U . (39,6)
Questa è la forma generale della funzione di Lagrange in un sistema di riferimento qualsiasi, non galileiano. [cioè la funzione di Lagrange espressa tramite le grandezze relative al sistema di riferimento non galileiano] Osserviamo che la rotazione del sistema di riferimento fa comparire nella funzione di Lagrange un termine del tutto speciale, lineare rispetto alla velocità della particella.
Per calcolare le derivate che intervengono nell'equazione di Lagrange, scriviamo il differenziale totale:
d L=m v d vm d v ×r m v ×d r m×r ×d r −m W d r−∂U∂ r
d r =
39

= m v d vmd v ×r m d r v×m [×r ×]d r−m W d r−∂U∂ r
d r .
[ ×r ⋅×d r =⋅⋅r⋅d r −r⋅⋅⋅d r =−[××d r ]d r ]
Radunando i termini che contengono dv e dr , si ottiene:
∂L∂v=mvm ×r [ d
d t ∂ L∂ v =m d v
d tm×r m×v ]
∂L∂ r=m v×m×r ×−mW−∂U
∂ r.
Introdotte nella (39,2), queste espressioni ci danno l'equazione del moto cercata:
m d vd t=−∂U
∂ r−mWm r×2 m v×m× r×. (39,7)
[i primi due termini del 2° membro sono relativi alla traslazione, gli altri alla rotazione]Si vede che le “forze d'inerzia” dovute alla rotazione del sistema di riferimento si compongono
di tre parti. La forza m r× è legata alla non uniformità della rotazione, e le altre due sono pre-senti anche se la rotazione è uniforme. La forza 2 mv× è chiamata forza di Coriolis; a diffe-renza di tutte le forze (non dissipative) che abbiamo considerato prima, essa dipende dalla velocità della particella. La forza m× r× è detta centrifuga. Essa è diretta nel piano passante per r e Ω perpendicolarmente all'asse di rotazione (cioè alla direzione di Ω) e con verso che si allontana dall'asse; ha come valore assoluto mρΩ2 dove ρ è la distanza della particella dall'asse di rotazione.
Consideriamo in particolare il caso di un sistema di coordinate animato da una rotazione unifor-me, senza accelerazione del moto di traslazione. Ponendo nelle (39,6) e (39,7) Ω = cost , W = 0, ot-teniamo la funzione di Lagrange
L=m v2
2m v ×r m
2×r 2−U (39,8)
e l'equazione del moto
m d vd t=−∂U
∂ r2mv×m× r×. (39,9)
Calcoliamo anche qui l'energia della particella. Portando
p=∂ L∂ v=m vm×r [ved. (7,2)] (39,10)
nella E = pv – L, [ved. (6,1)] si ottiene:
E=m v2
2−
m2×r 2U . [energia relativa al sistema mobile] (39,11)
Osserviamo che nell'espressione dell'energia non ci sono termini lineari rispetto alla velocità. L'in-fluenza della rotazione del sistema di riferimento si riduce all'addizione di un termine dipendente solamente dalle coordinate della particella e proporzionale al quadrato della velocità angolare. Que-
sta energia potenziale supplementare −m2×r 2 è detta centrifuga.
La velocità v della particella rispetto al sistema di riferimento rotante uniformemente è legata alla sua velocità rispetto al sistema galileiano K0 da
40

v0=v×r . (39,12)
Di conseguenza, l'impulso p (39,10) della particella nel sistema K coincide con il suo impulso p0 = mv0 nel sistema K0 . Lo stesso accade per i momenti cinetici M 0=r× p0 e M=r× p . Ma le energie della particella nei sistemi K e K0 sono diverse. Introducendo v ricavata dalla (39,12) nel-la (39,11), otteniamo:
E=m v0
2
2−mv0×r U=
m v02
2U−m r×v 0 .
I primi due termini rappresentano l'energia E0 nel sistema K0 . Introducendo nell'ultimo termine il momento cinetico, otteniamo:
E=E0−M. (39,13)
Questa formula definisce la legge di trasformazione dell'energia quando si passa ad un sistema di coordinate animato da una rotazione uniforme. Anche se l'abbiamo stabilita per una sola particel-la, è evidente che il ragionamento si può immediatamente generalizzare ad un sistema qualunque di particelle e si arriva alla stessa formula (39,13).
Problemi
1. Si abbia un corpo in caduta libera. Trovare lo scostamento rispetto alla verticale provocato dalla rotazione della Terra (la velocità angolare di rotazione sarà considerata piccola).
Soluzione. Nel campo della gravità U = - mgr , dove g è il vettore accelerazione di gravità; trascu-rando nell'equazione (39,9) la forza centrifuga che include il quadrato di Ω , [3° termine] otteniamo l'equazione del moto nella forma
v=2v×g . (1)
Risolviamo questa equazione con approssimazioni successive. Per far questo poniamo v = v1 + v2
dove v1 è la soluzione dell'equazione v1=g , cioè v1 = gt + v0 (v0 velocità iniziale). Portando
v = v1 + v2 nella (1) e tenendo solo v1 nel risultato, otteniamo per v2 l'equazione [si trascura v2 x Ω]
v2=2 v1×=2 t g×2 v0×.
L'integrazione fornisce
r=hv0 t g t 2
2
t 3
3g×t 2 v0× , (2)
dove h è il vettore della posizione iniziale della particella.
Orientiamo l'asse z verticalmente verso l'alto e l'asse x secondo il meridiano verso il polo; si ha allo-ra
gx = gy = 0, gz = - g, Ωx = Ω cos λ, Ωy = 0, Ωz = Ω sin λ,dove λ è la latitudine (diciamo nord per fissare le idee). Ponendo nella (2) v0 = 0, si trova
x = 0, y=− t 3
3gcos . [g x Ω = - g Ωx j ]
Introducendo il tempo di caduta t≃2 h / g , troviamo alla fine
41

x = 0, y=− 13 2h
g 3/2
g cos
(il segno negativo per y corrisponde ad uno spostamento verso est).
2. Determinare lo scostamento dal piano per un corpo lanciato dalla superficie della Terra con una velocità iniziale v0 .
Soluzione. Scegliamo il piano xz in modo che contenga la velocità v0 . [z perpendicolare alla superficie terrestre] Altezza iniziale h = 0 . Per lo scostamento laterale, l'equazione (2) del problema 1 ci dà
y=− t 3
3gxt 2x v0 x− z v0 x ,
cioè, sostituendovi la durata del tragitto t ≈ 2v0z /g :
y=4 v0 z
2
g2 13 v0 z x−v0 xz.3. Determinare l'influenza della rotazione della Terra sulle piccole oscillazioni di un pendolo (pen-dolo di Foucault).Soluzione. Trascurando lo spostamento verticale del pendolo come infinitesimo del secondo ordine, si può considerare che il moto avvenga nel piano orizzontale xy . Tralasciamo i termini che conten-gono Ω2, e scriviamo le equazioni del moto nella forma [in base alla (39,9) e all'equazione del pendolo
m l =−m g sin , l≃x , sin≃≃ x / l ]
x2 x=2 z y , y2 y=−2z x ,
dove ω è la frequenza delle oscillazioni del pendolo non tenendo conto della rotazione della Terra. Moltiplicando la seconda equazione per i e sommandola alla prima, otteniamo l'unica equazione
2 iz 2=0
nella quantità complessa ξ = x + iy . Per Ωz << ω [che conduce a porre ω ≈ ω0 nell'equazione che è del tipo della (25,4)] la soluzione di questa equazione ha la forma
=e−i z t A1 ei tA2 e−i t
oppure
xi y=e−i z t x0i y0 ,
dove le funzioni x0 (t) e y0 (t) danno la traiettoria del pendolo senza tener conto della rotazione della Terra. L'influenza di tale rotazione si traduce di conseguenza in una rotazione della traiettoria attor-no alla verticale con una velocità angolare Ωz .
42