Brutus Dem¸soreanu - Physicsbrutus/mecanica.pdf · Mecanica este prima din teoriile despre...
468
Brutus Dem¸ soreanu Mecanic˘ a teoretic˘ a - cu aplicat ¸ii - TIMIS ¸OARA 2002
Transcript of Brutus Dem¸soreanu - Physicsbrutus/mecanica.pdf · Mecanica este prima din teoriile despre...
Brutus Demsoreanu
Mecanica teoretica
- cu aplicatii -
TIMISOARA 2002

Tehnoredactarea ın LATEX2ε apartine autorului.
Copyright c© 2002, B. Demsoreanu
Cuprins
I Mecanica rationala 7
1 Concepte generale 91.1 Scurt istoric . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2 Spatiul, timpul, miscarea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3 Masa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4 Forta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.5 Cinematica punctului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 Principiile Galilei-Newton 312.1 Enunturi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.2 Problema determinarii miscarii . . . . . . . . . . . . . . . . . . . . . . . . . 332.3 Miscarea relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.4 Sisteme inertiale. Grupul lui Galilei . . . . . . . . . . . . . . . . . . . . . . . 43
3 Dinamica punctului material 523.1 Integralele prime ale miscarii . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.2 Teoreme generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2.1 Teorema impulsului . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.2.2 Teorema momentului cinetic . . . . . . . . . . . . . . . . . . . . . . . 533.2.3 Teorema energiei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.2.4 Teorema virialului . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.3 Dinamica punctului supus la legaturi . . . . . . . . . . . . . . . . . . . . . . 62
4 Dinamica sistemelor de puncte materiale 744.1 Teoreme generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.1.1 Teorema impulsului si teorema miscarii centrului de masa . . . . . . . 754.1.2 Teorema momentului cinetic . . . . . . . . . . . . . . . . . . . . . . . 774.1.3 Teorema energiei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5 Solidul rigid 855.1 Precizarea pozitiei rigidului ın spatiu . . . . . . . . . . . . . . . . . . . . . . 85
5.1.1 Gradele de libertate ale rigidului . . . . . . . . . . . . . . . . . . . . 855.1.2 Matricea de rotatie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865.1.3 Unghiurile Euler. Vectorul rotatie . . . . . . . . . . . . . . . . . . . . 89
5.2 Elemente de cinematica rigidului . . . . . . . . . . . . . . . . . . . . . . . . 93
3

4 CUPRINS
5.2.1 Miscarea de translatie . . . . . . . . . . . . . . . . . . . . . . . . . . 955.2.2 Miscarea de rotatie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.2.3 Miscarea generala a rigidului . . . . . . . . . . . . . . . . . . . . . . . 99
5.3 Momente de inertie. Caracteristici dinamice ale rigidului . . . . . . . . . . . 1015.3.1 Momentul de inertie al rigidului ın raport cu o axa . . . . . . . . . . 1025.3.2 Elipsoidul de inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.3.3 Impulsul, momentul cinetic si energia cinetica . . . . . . . . . . . . . 107
5.4 Dinamica solidului rigid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.4.1 Ecuatiile de miscare ale rigidului . . . . . . . . . . . . . . . . . . . . 1095.4.2 Miscarea rigidului cu axa fixa . . . . . . . . . . . . . . . . . . . . . . 1185.4.3 Miscarea rigidului cu punct fix . . . . . . . . . . . . . . . . . . . . . . 124
6 Mecanica mediilor continue deformabile 1426.1 Notiuni fundamentale si principii generale . . . . . . . . . . . . . . . . . . . 142
6.1.1 Conceptul de particula materiala . . . . . . . . . . . . . . . . . . . . 1426.1.2 Ecuatia de continuitate a masei . . . . . . . . . . . . . . . . . . . . . 1456.1.3 Caracteristici dinamice si teoreme generale . . . . . . . . . . . . . . . 147
6.2 Teoria geometrica a micilor deformatii . . . . . . . . . . . . . . . . . . . . . 1496.2.1 Vectorul deplasare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1506.2.2 Tensorul de deformatie . . . . . . . . . . . . . . . . . . . . . . . . . . 1516.2.3 Tensorul vitezelor de deformatie . . . . . . . . . . . . . . . . . . . . . 157
6.3 Tensorul tensiunilor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1586.4 Ecuatiile de miscare ale lui Cauchy . . . . . . . . . . . . . . . . . . . . . . . 165
7 Ecuatiile mediilor elastice 1677.1 Relatii dintre tensiuni si deformatii . . . . . . . . . . . . . . . . . . . . . . . 167
7.1.1 Legea generalizata a lui Hooke . . . . . . . . . . . . . . . . . . . . . . 1687.1.2 Constante elastice fundamentale . . . . . . . . . . . . . . . . . . . . . 174
7.2 Ecuatiile de miscare si de echilibru ale mediului elastic . . . . . . . . . . . . 1787.3 Torsiunea barelor cilindrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1837.4 Unde elastice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
8 Elemente de mecanica fluidelor 2018.1 Legi constitutive si ecuatii de miscare . . . . . . . . . . . . . . . . . . . . . . 2018.2 Fluide ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2068.3 Miscari potentiale plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2148.4 Fluide vascoase. Formula lui Stokes . . . . . . . . . . . . . . . . . . . . . . . 223
II Mecanica analitica 229
9 Bazele mecanicii analitice 2319.1 Legaturi si deplasari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2319.2 Determinarea miscarii. Axioma legaturilor ideale . . . . . . . . . . . . . . . 2379.3 Ecuatia generala a dinamicii . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
CUPRINS 5
9.3.1 Principiul deplasarilor virtuale . . . . . . . . . . . . . . . . . . . . . . 240
10 Sisteme olonome 25310.1 Coordonate generalizate. Spatiul configuratiilor . . . . . . . . . . . . . . . . 25310.2 Ecuatiile Lagrange pentru sisteme olonome . . . . . . . . . . . . . . . . . . . 25510.3 Teorema energiei - forte potentiale si nepotentiale . . . . . . . . . . . . . . . 25910.4 Sisteme naturale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
10.4.1 Functia lui Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . 27510.4.2 Impulsuri generalizate. Coordonate ciclice . . . . . . . . . . . . . . . 27910.4.3 Teoreme generale si legi de conservare . . . . . . . . . . . . . . . . . . 280
11 Sisteme neolonome 30711.1 Ecuatiile Lagrange pentru sisteme neolonome . . . . . . . . . . . . . . . . . 307
12 Problema celor doua corpuri 31312.1 Masa redusa. Problema echivalenta . . . . . . . . . . . . . . . . . . . . . . . 31312.2 Miscarea ın camp central . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
12.2.1 Ecuatiile miscarii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31512.2.2 Studiul traiectoriilor . . . . . . . . . . . . . . . . . . . . . . . . . . . 31812.2.3 Ecuatia lui Binet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
12.3 Miscarea kepleriana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32312.3.1 Miscarea pe o traiectorie eliptica. Legile lui Kepler . . . . . . . . . . 326
12.4 Ciocniri elastice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33212.4.1 Cinematica ciocnirilor elastice . . . . . . . . . . . . . . . . . . . . . . 33312.4.2 Imprastierea particulelor ıntr-un camp de forte centrale . . . . . . . . 336
13 Mici oscilatii ın vecinatatea pozitiei de echilibru 34213.1 Stabilitatea pozitiei de echilibru . . . . . . . . . . . . . . . . . . . . . . . . . 34213.2 Studiul micilor oscilatii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
13.2.1 Oscilatiile proprii ale unui sistem conservativ . . . . . . . . . . . . . . 34513.2.2 Oscilatii amortizate . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35113.2.3 Oscilatii fortate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
14 Ecuatiile lui Hamilton 36414.1 Spatiul fazelor. Functia lui Hamilton . . . . . . . . . . . . . . . . . . . . . . 36414.2 Coordonate ciclice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
14.2.1 Metoda lui Routh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36914.3 Parantezele Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
15 Principii variationale. Invarianti integrali 38515.1 Principiul lui Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
15.1.1 Forma canonica a principiului lui Hamilton . . . . . . . . . . . . . . . 39115.2 Invarianti integrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
15.2.1 Variatii asincrone. Teorema Noether . . . . . . . . . . . . . . . . . . 40015.2.2 Invariantul integral fundamental Poincare-Cartan . . . . . . . . . . . 40315.2.3 Invariantul integral universal Poincare . . . . . . . . . . . . . . . . . 408
6 CUPRINS
15.2.4 Teorema lui Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . 41215.3 Principiul minimei actiuni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
16 Integrarea sistemului canonic 42216.1 Transformari canonice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422
16.1.1 Ecuatiile transformarilor canonice . . . . . . . . . . . . . . . . . . . . 42216.1.2 Criterii de canonicitate . . . . . . . . . . . . . . . . . . . . . . . . . . 432
16.2 Metoda Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43816.2.1 Ecuatia si teorema Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . 43816.2.2 Metoda separarii variabilelor . . . . . . . . . . . . . . . . . . . . . . . 44416.2.3 Variabilele actiuni-unghiuri . . . . . . . . . . . . . . . . . . . . . . . 456
Bibliografie 465

I.Mecanica rationala

Capitolul 1
Concepte generale
1.1 Scurt istoric
Mecanica se ocupa cu studiul miscarii sistemelor materiale tinand seama, daca estecazul, de fortele care o pot influenta. Prin miscare se ıntelege schimbarea pozitiei relativea unui sistem, deci o deplasare ın spatiu. Echilibrul fiind o pozitie particulara a sistemuluimaterial, va fi studiat tot ın cadrul mecanicii. Prin sistem material se ıntelege un mod deorganizare a materiei caracterizat prin proprietati de structura, de forma si de raspuns laactiunile exterioare. Prin materie se ıntelege realitatea obiectiva de care luam la cunostintaprin intermediul senzatiilor, perceptiilor si gandirii.
In definitiile enuntate mai sus au fost deja folosite explicit sau implicit unele notiunifundamentale ca spatiul, timpul, miscarea, masa, forta, etc., care sunt forme de existentaale realitatii si se afla ın stransa interdependenta. Pe parcurs, aceste notiuni vor fi mai bineprecizate, desi caracterul lor va ramane ın continuare relativ, el fiind determinat de nivelulcunostintelor noastre la un moment dat.
Mecanica este prima din teoriile despre natura care s-a constituit ca stiinta, ea fiindcea care a realizat pentru ıntaia oara trecerea de la faza de descriere a unor fenomene lafaza de determinare cauzala a lor. Sistemul de notiuni si axiome folosit ın mecanica, carecaracterizeaza cantitativ, matematic, esenta unui fenomen, permite ca pe baza cunoasteriistarii sale la un moment dat, sa poata fi determinata evolutia sa ulterioara. In consecintamodelul matematic al miscarii sta la baza stiintei mecanicii. Modelul ısi extrage esentadin realitate pe calea experimentului, abstractizarii si generalizarii, tot experimentul fiind celcare decide asupra valabilitatii rezultatelor. Odata construit modelul matematic, din el potfi deduse concluzii referitoare la evolutia fenomenului, ınsa este evident ca nu pot fi dedusedecat acele amanunte care exista potential ın notiunile si axiomele folosite. Atunci cand ınurma unui experiment este pus ın evidenta un fenomen care contrazice concluziile dedusematematic din model, va trebui modificat modelul utilizat. Insa modificarea nu trebuiefacuta arbitrar, ci astfel ıncat noul model sa explice noul fenomen si totodata sa conduca laaceleasi rezultate ın cazul studiului fenomenelor pentru care vechiul model era adevarat. Inacest mod modelele se perfectioneaza continuu.
Etapa inductiva, de formare a continutului modelului matematic este mult mai lunga simai dificila decat etapa deductiva, de extragere a adevarurilor continute potential ın model.
9
10 CAPITOLUL 1. CONCEPTE GENERALE
In cazul mecanicii etapa inductiva a durat aproape 2000 de ani. Unul din motivele pentrucare ea a durat atat de mult este acela ca desi bazele mecanicii au fost puse ınca ın antichitate,gandirea aristotelica si scolastica evului mediu refuzau ın mare masura experimentul ca mijlocde investigare a realitatii. In acest sens, diferitele speculatii filosofice se bazau pe ideea caorice forma de miscare are drept cauza o forta si ın consecinta trebuia sa existe o legaturacauzala directa ıntre forta si viteza. S-a putut renunta la aceasta dogma doar atunci candGalilei, bazat pe experimente, a enuntat principiul inertiei conform caruia daca asupraunui corp nu actioneaza nici o forta, el se misca rectiliniu si uniform sau ramane ın starede repaus, ın raport cu starea ın care se gasea ın momentul ıncetarii actiunii fortei. Odataformulat acest principiu ıncepe o dezvoltare accelerata a mecanicii ca stiinta. Consecintasa logica imediata era ca din moment ce pot exista miscari si ın absenta fortelor, legaturacauzala posibila nu era aceea dintre forta si viteza, ci eventual cea dintre forta si variatiavitezei.
Al doilea motiv care a ıntarziat mult dezvoltarea mecanicii l-a constituit lipsa unui aparatmatematic adecvat destinat caracterizarii cantitative a unui fenomen atat de complex si devariabil cum este miscarea. Acest aparat matematic, creat ın mare parte de Newton tocmaipentru a putea defini elementele care caracterizeaza miscarea, era strict necesar pentru arealiza trecerea de la faza de descriere a fenomenelor la faza de studiu a determinarii lorcauzale. Caracterizarea cantitativa a unui fenomen este efectuata prin intermediul unoroperatii de masurare care consta ın asocierea de numere unor marimi fizice, legile mecaniciiexprimandu-se prin relatii ıntre astfel de numere. Mecanica a fost prima dintre stiintelenaturii ın cadrul careia a fost initiata trecerea de la realitati la simboluri matematice siinvers, devenind astfel posibila trecerea de la studiul calitativ al faptelor, la studiul lorcantitativ si cauzal.
Determinarea cauzala a fenomenelor de miscare este sintetizata ın principiul conformcaruia, atunci cand la momente diferite si ın locuri diferite sunt realizate aceleasi conditii,fenomenele se reproduc identic. In baza acestui principiu, spatiul si timpul reprezinta uncadru omogen si universal ın care se desfasoara miscarea. Acest postulat fundamental stala baza conceptiei newtoniene despre spatiu si timp. Legea a doua a lui Newton realizeazatocmai definirea cauzala a fenomenului de miscare.
Dupa cum se stie, primul model al mecanicii a fost construit de Newton care dupa ceintroduce notiunile de cantitate de materie, cantitate de masa si forta, de spatiu, timp simiscare, formuleaza cele trei legi fundamentale ale mecanicii punctului material. Modelul afost dezvoltat de Euler care pune bazele mecanicii sistemelor de puncte si ale mecanicii rigi-dului. In continuare Lagrange, Cauchy, Navier, Lame, etc., dezvolta metodele mecaniciimediilor continue deformabile elastice si fluide.
Principiile mecanicii newtoniene au o forma relativ simpla, ınsa aplicarea lor la studiul ao serie de probleme concrete conduce de multe ori la dificultati greu de depasit. Aceasta sedatoreste tocmai gradului lor ınalt de abstractizare, fapt ce nu este ınsotit de o formalizarecorespunzatoare, ceea ce a condus pe d’Alembert si Lagrange la elaborarea bazelor me-canicii analitice. Aceasta matematizare extrema a mecanicii sistemelor cu un numar finitde parametri are avantajul ca reprezinta o teorie generala suficient de abstracta capabilasa fie aplicata ın cele mai diverse cazuri, ınsa are un revers deloc neglijabil, anume ca prinındepartarea mecanicii de concret, ea tinde sa devina sterila. Dupa cum se va va remarca,mecanica analitica se ocupa doar ın mica masura de fenomenele mecanice reale, cu frecare.
1.2. SPATIUL, TIMPUL, MISCAREA 11
Mecanica analitica reprezinta ın fond doar un aspect al mecanicii newtoniene, deoarece sebazeaza pe aceleasi principii, ea nascandu-se din necesitatile de dezvoltare interna a meca-nicii. Principial ea nu aduce nimic nou, ın schimb prin abstractizare ea pune ın evidentaaspecte noi ale aceluiasi continut. Acesta este motivul pentru care mecanica analitica si nucea newtoniana sta la baza unor teorii moderne ca de exemplu fizica statistica, mecanicacuantica, etc. O contributie ınsemnata la dezvoltarea mecanicii analitice si la completarea eicu noi rezultate au adus Hamilton, Jacobi, Ostrogradski, Poisson, Poincare, etc., careau folosit pe scara larga o serie de metode speciale din analiza matematica, cum ar fi calcululvariatiilor, teoria ecuatiilor diferentiale ordinare si cu derivate partiale, teoria invariantilorintegrali, etc.
Este interesant de observat ca prin ınsasi conceptia sa, metoda analitica a demonstrat camecanica se poate dezvolta pornind de la sisteme de axiome diferite. Continutul fizic al aces-tora fiind ınsa identic, este evident ca indiferent de formele si structurile matematice utilizate,rezultatele vor fi ıntotdeauna aceleasi. Avantajul uneia sau alteia dintre metode depinde deaspectul particular al fenomenului pe care dorim sa-l scoatem mai bine ın evidenta.
Deoarece continutul concret al notiunilor si axiomelor pe care se construieste o stiintaare un caracter istoric, determinat de nivelul cunostintelor la un moment dat, este natural cape parcurs sa apara fapte care contrazic teoriile anterioare. Aceasta implica reconsiderareavechilor concepte, deci a modelului care trebuie perfectionat astfel ıncat sa explice noilefapte si ın acelasi timp sa includa ın el si caracteristicile care explicau rezultatele anterioare.La sfarsitul secolului al XIX-lea, odata cu perfectionarea metodelor de masura, au ınceputsa fie puse ın evidenta o serie de rezultate experimentale care erau ın evidenta contradictiecu cele obtinute pe baza mecanicii newtoniene, dovedindu-se ıntre altele imposibilitateaaplicarii legilor mecanicii la fenomenele electromagnetice. Prin cele doua postulate pe carese bazeaza mecanica relativista restransa, anume covarianta legilor naturii ın raportcu sistemele inertiale si respectiv constanta vitezei luminii ın vid, Einstein a modificatınsasi conceptia newtoniana despre spatiu, timp si masa. In esenta spatiul si timpul devindoua laturi complementare ale unei categorii mult mai generale, anume spatiul-timp, iar pede alta parte masa nu mai poate fi considerata o constanta ın cursul miscarii, ea variindcu viteza. La viteze mici, teoria relativitatii restranse conduce la aceleasi concluzii ca simecanica newtoniana. Ulterior aceste idei au fost incluse ın teoria relativitatii generale, carecuprinde si teoria gravitatiei.
1.2 Spatiul, timpul, miscarea
Spatiul reprezinta proprietatea corpurilor de a avea ıntindere, de a ocupa un anumit locsi de a fi asezate ıntr-un anumit mod printre celelate obiecte ale lumii materiale. Cand dupao serie de miscari ale noastre regasim acelasi aspect de asezare si ıntindere a corpurilor, zicemca am revenit ın acelasi loc. Ansamblul tuturor locurilor pe care le pot ocupa obiectele lumiimateriale poarta numele de spatiu fizic. Datorita consensului oamenilor asupra locurilor,ın mecanica clasica i s-a conferit spatiului un caracter absolut.
Deoarece spatiul reflecta proprietatea corpurilor de avea lungime, latime si ınaltime,sunt necesare si suficiente doar trei specificatii pentru a putea preciza pozitia unui loc ınspatiu. Astfel ın mecanica clasica se admite ca spatiul are trei dimensiuni si reprezinta

12 CAPITOLUL 1. CONCEPTE GENERALE
un cadru la care se raporteaza miscarea. Diferitele locuri din spatiu vor fi desemnate prinpuncte, iar punctelor li se asociaza un ansamblu de trei numere care reprezinta coordonateleacestora fata de un sistem de referinta ales convenabil, de obicei triortogonal. Se admitede asemenea ca spatiul este omogen si izotrop, deci ca este un spatiu euclidian E3 .
Figura 1.1: Vectorul de pozitie al punctului P ıntr-un reper cartezian
Pozitia unui punct ın spatiu este caracterizata cu vectorul de pozitie r care este un vectorlegat si care ıntr-un reper cartezian are componentele x, y, z . Proprietatea fundamentala aspatiului E3 este aceea ca distanta dintre doua puncte P1(x1, y1, z1) si P2(x2, y2, z2) este datade expresia :
|r1 − r2| =√
(x1 − x2)2 + (y1 − y2)
2 + (z1 − z2)2 (1.1)
Pentru nevoile mecanicii se mai face precizarea ca spatiul este nelimitat, continuu si ca uncorp poate ocupa orice pozitie.
Spre deosebire de mecanica clasica, unde se postuleaza ca spatiul fizic este un spatiueuclidian, ın mecanica relativista se admite ca spatiul are o structura determinata de prezentamateriei, el fiind astfel riemannian.
Notiunea de timp este legata de succesiunea senzatiilor noastre biologice. Intercalareaacestor senzatii pe o scara individuala conduce la notiunea de timp fizic individual carenu este masurabil ın sine. Insa doi indivizi ısi pot sincroniza scarile temporale individualeajungandu-se astfel, din aproape ın aproape, la conceptul de timp fizic universal. Insasincronizarea scarilor temporale depinde de modul de transmitere a semnalelor. In mecanicaclasica se admite ca aceasta transmisie are loc instantaneu si deci ca timpul poate avea uncaracter absolut.
Definind un eveniment ca un proces elementar care nu are durata, doua evenimente pot fisau simultane, sau succesive. Deoarece multimea evenimentelor este ordonata, rezulta catimpul are o singura dimensiune. De asemenea timpul este omogen (se scurge uniform)si este ireversibil.
Alegand un eveniment arbitrar ca origine de la care se masoara timpul si notand cu tnumarul ce corespunde timpului la care se petrece un eveniment ulterior, atunci t va fi unparametru real si pozitiv care poate varia continuu, monoton crescator si poate lua oricevaloare. Din punct de vedere matematic acest t reprezinta o variabila independenta.Admitand ca la fiecare moment punctul poate ocupa alta pozitie, vectorul de pozitie alpunctului va fi ıntotdeauna functie de t :
r = r(t) (1.2)

1.3. MASA 13
Se ajunge astfel la notiunea de miscare a punctului ın raport cu triedrul de referinta, ecuatia(1.2) reprezentand ecuatia traiectoriei punctului respectiv.
Generalizand notiunea, vom spune ca sistemul A este ın miscare fata de sistemul B,atunci cand distantele diverselor puncte ale sistemului A la diversele puncte ale sistemuluiB, variaza ın timp. Este evident ca prin acest enunt este definita miscarea unui sistem ınraport cu altul, adica o miscare relativa. Se poate presupune ca sistemul B este rigid,adica distantele dintre oricare doua puncte ale sale nu variaza si ca acesta este alcatuit din celputin trei puncte necoliniare. Un astfel de sistem defineste ın spatiul E3 un reper (o pozitiesi o orientare). Daca distantele diverselor puncte ale sistemului A la diversele puncte alesistemului B sunt invariabile ın timp, se spune ca sistemul A este ın repaus fata de sistemulB. Conform celor de mai sus, este vorba de un repaus relativ.
In mecanica clasica se poate vorbi de asemenea si de miscare absoluta sau repausabsolut, ca despre miscarea, respectiv repausul sistemului ın raport cu un reper presupusfix. In realitate nu se stie ce ınsemna de fapt un reper fix, acesta putand fi considerat astfeldoar ın anumite circumstante simplificatoare si doar pentru o anumita clasa de miscari.
Trebuie facuta de asemenea observatia ca modelele de spatiu absolut si timp absolut,lipsite de structura, pe care le adopta mecanica clasica, reprezinta doar prime aproximatiiale realitatii si de aceea rezultatele obtinute ın mecanica clasica sunt valabile doar ın anumitecircumstante, respectiv ın cazul unor distante si viteze relativ mici. La studiul miscariicorpurilor cu viteze mari, se renunta la unele din aceste concepte, rezultatele corecte fiindfurnizate de mecanica relativista.
1.3 Masa
Masa reprezinta o proprietate a materiei care se manifesta ın toate fenomenele demiscare. In mecanica clasica pot fi puse ın evidenta doua aspecte ale masei, anume masainerta mi care se manifesta ın miscarea materiei si reprezinta o masura a inertiei unui corp si
masa grea mg =G
gcare se manifesta ın cauzele care produc miscarea. Experienta va arata
ca din punct de vedere numeric, cele doua mase sunt egale. In teoria relativitatii generale seva postula ınsa ca cele doua mase sunt egale nu numai cantitativ, ci si calitativ, deci ca elesunt identice.
Se admite ca orice punct al spatiului E3 este susceptibil de a fi ocupat de materie. Atuncioricarui punct P i se poate asocia o marime m ≥ 0 care poarta numele de masa punctului P siastfel punctul geometric devine punct material. Masa unui punct material se consideraindivizibila, ca si suportul ei. In acest mod pot fi reprezentate masele unor corpuri relativmici, care nu se rotesc ın jurul lor.
Daca avem de a face cu un sistem de puncte Pi (i = 1, 2, . . . , N) ıntr-o regiune din spatiu,asociind fiecaruia din aceste puncte cate o marime mi ≥ 0 , prin definitie masa sistemuluide puncte materiale va fi :
M =N∑
i=1
mi (1.3)
Un sistem de puncte materiale poate fi deformabil sau nedeformabil, dupa cum pozitiilerelative ale punctelor materiale, unele fata de altele, se pot modifica sau nu ın cursul miscarii.

14 CAPITOLUL 1. CONCEPTE GENERALE
Cand fiecare loc dintr-o portiune conexa D a spatiului este ocupat de un punct material,sistemul va forma un mediu continuu. Prespunand ca ın acest spatiu elementul dv estesuportul lui dm, daca exista o functie numerica ρ(r, t) ≥ 0 continua cel putin pe portiuniastfel ıncat sa se poata scrie
dm = ρ(r, t) dv (1.4)
atunci functia numerica ρ poarta numele de masa specifica sau masa unitatii de volum.Admitand ca oricare ar fi descompunerea lui D ın elementele dv, suma elementelor dm va fiıntotdeauna aceeasi, se va putea scrie
M =∫
D
dm =∫
D
ρ(r, t) dv (1.5)
unde M reprezinta masa continuta ın domeniul D al spatiului. Mediile continue pot fi larandul lor nedeformabile si deformabile. Mediul nedeformabil mai poarta numele de solidrigid sau simplu rigid. Mediile deformabile pot fi atat fluide, cat si solide, dupa cum pot saunu sa ia forma vasului ın care sunt puse. Corpurile fluide pot fi gazoase daca au proprietatide expansiune, sau lichide daca sunt practic incompresibile.
Formula (1.5) a fost scrisa pentru cazul ın care suportul maselor este un domeniu spatial.Ea ısi pastreza valabilitatea si ın cazul unei suprafete materiale ınsa atunci D va reprezentaacea suprafata, ρ masa unitatii de arie, iar dv elementul de suprafata. Analog, ın cazul uneicurbe materiale D va reprezenta acea curba, ρ masa unitatii de lungime si dv elementulde arc.
Daca domeniul D este suportul unei unei distributii discrete de puncte materiale, pentrua putea calcula masa totala cu ajutorul relatiei (1.5), va trebui definita o masa specificape tot spatiul, asa ıncat rezultatul calculat sa fie identic cu cel dat de formula (1.3). Inacest scop trebuie utilizata functia δ a lui Dirac, care prin definitie este caracterizata prinproprietatile :
∫
D
δ(r− r0) F (r) dv = F (r0) si∫
D
δ(r− r0) dv = 1 (1.6)
Daca domeniul D contine un singur punct material de masa m0, avand vectorul de pozitier0, masa specifica definita pe tot domeniul va avea expresia :
ρ = m0 δ(r− r0) (1.7)
si conform definitiilor (1.5) si (1.6) rezulta :
M = m0
∫
D
δ(r− r0) dv = m0 (1.8)
Daca domeniul D contine i = 1, 2, . . . , N puncte materiale de mase mi si vectori de pozitieri, atunci masa specifica va avea expresia :
ρ =N∑
i=1
mi δ(r− ri) (1.9)

1.3. MASA 15
iar masa totala calculata cu formula (1.5) va fi :
M =N∑
i=1
mi
∫
D
δ(r− ri) dv =N∑
i=1
mi (1.10)
adica rezultatul calculat cu formula (1.3).In mecanica clasica se presupune ca masa unui punct material este constanta :
dm
dt= 0. Aceeasi proprietate se atribuie masei unui element din continuu, precum si masei
unui continuu a carui existenta poate fi individualizata. Aceasta ipoteza, care se bazeaza peprincipiul conservarii materiei, constituie una din deosebirile fundamentale ıntre mecanicaclasica si mecanica relativista.
Centrul de masa
Dat fiind un sistem oarecare de puncte materiale, punctul de vector de pozitie rc ın raportcu un reper arbitrar cu originea ın O, definit de ecuatia :
N∑
i=1
mi r′i =
N∑
i=1
mi (ri − rc) = 0 (1.11)
poarta numele de centru de masa al sistemului. Aici r′i reprezinta vectorii de pozitie aipunctelor Pi care alcatuiesc sistemul, ın raport cu un reper avand originea ın C.M. . Esteevident ca pentru un sistem dat exista un singur punct care se bucura de proprietatea (1.11).
Figura 1.2: Vectorul de pozitie al centrului de masa
Intr-adevar, daca ar exista un alt punct, avand vectorul de pozitie rc1 ın raport cu acelasireper O, care s-ar bucura de proprietatea (1.11), atunci prin scadere rezulta :
M∑
i=1
mi(ri − rc)−M∑
i=1
mi(ri − rc1) = (rc1 − rc)M∑
i=1
mi = 0 (1.12)
adica rc1 = rc . Folosind definitia (1.3), din (1.11) rezulta expresia vectorului de pozitie alcentrului de masa ın raport cu reperul cu originea ın O :
rc =1
M
N∑
i=1
miri unde M =N∑
i=1
mi (1.13)

16 CAPITOLUL 1. CONCEPTE GENERALE
Componentele carteziene ale vectorului rc(xc, yc, zc) se obtin proiectand ecuatia (1.13) pecele trei axe de coordonate :
xc =1
M
N∑
i=1
mixi ; yc =1
M
N∑
i=1
miyi ; zc =1
M
N∑
i=1
mizi (1.14)
In cazul unui sistem material continuu care ocupa domeniul D din spatiu, vectorul depozitie rc al centrului de masa va fi definit de expresia :
∫
D
r′ dm =∫
D
(r− rc) dm = 0 (1.15)
de unde folosind (1.4) rezulta :
rc =1
M
∫
D
r dm =1
M
∫
D
r ρ dv unde M =∫
D
ρ dv (1.16)
iar componentele sale carteziene vor fi date de expresiile :
xc =1
M
∫
D
x ρ dv ; yc =1
M
∫
D
y ρ dv ; zc =1
M
∫
D
z ρ dv (1.17)
Din definitia centrului de masa rezulta ca pozitia acestuia ın raport cu sistemul nu de-pinde de reperul ales, ea fiind o caracteristica intrinseca a sistemului material. De ase-menea, daca suprafata care delimiteaza domeniul D este convexa, centrul de masa se vagasi ıntotdeauna ın interiorul suprafetei respective. Pentru determinarea practica a pozitieicentrului de masa sunt utile urmatoarele observatii : daca punctele sistemului material se si-tueaza pe o dreapta sau ıntr-un plan, atunci centrul de masa se va gasi pe dreapta sau planulrespectiv ; daca sistemul material are un plan de simetrie, o axa de simetrie, sau un centrude simetrie, atunci centrul de masa va fi continut ın varietatea de simetrie ; daca sistemulse compune din mai multe parti cu masele mj (j = 1, 2, . . . , n) avand vectorii centrelor demasa rcj , atunci vectorul de pozitie al centrului de masa al sistemului va fi dat de expresia :
rc =
n∑
j=1
mjrcj
n∑
j=1
mj
(1.18)
Formulele (1.13), (1.18) si (1.16) sugereaza ideea, care va fi confirmata ulterior, ca centrulde masa se comporta ca un punct material ın care ar fi concentrata ıntreaga masa a sistemului.
1.4 Forta
Se stie ca principiul inertiei afirma ca starea naturala a corpurilor este cea de repaus saude miscare rectilinie uniforma. Agentul exterior care poate modifica aceasta stare este forta.Astfel ın mecanica forta este o marime derivata din miscare si atunci cand se constata variatia

1.4. FORTA 17
vitezei unui corp, se spune ca este prezenta o forta. Forta ın esenta ei reprezinta un aspectal interactiunii corpurilor si fenomenelor din Univers, anume acel aspect care determinadeplasarea corpurilor. Intrucat interactiunea corpurilor poate sa se manifeste ın diversemoduri, fortele pot fi continue sau discontinue, de contact sau corespunzatoare actiuniila distanta. Actiunea la distanta reprezinta un aspect al realitatii numit camp. Prin campse ıntelege un domeniu din spatiu ın care se manifesta influenta unui corp sau fenomen asupraaltui corp care strabate domeniul respectiv. In mecanica clasica actiunea la distanta pe carecampul o exercita asupra unui corp este caracterizata printr-o forta, admitandu-se totodataca aceasta actiune se propaga instantaneu. Ipoteza propagarii instantanee, care sta sila baza definitiei notiunii de timp absolut, nu este confirmata de experienta, ın mecanicarelativista ea fiind ınlocuita cu ipoteza propagarii actiunii din aproape ın aproape.
In general originea fortelor nu este de natura mecanica si de aceea mecanica le va pre-supune ca fiind date. Mecanica se ocupa de studiul calitativ si cantitativ al fortelor ce seexercita ıntre corpuri, precum si de miscarea corpurilor sub actiunea acestor forte. Staticase ocupa de problema ınlocuirii unui sistem de forte dat cu un sistem de forte echivalent, ınparticular cu sistemul de forte nul (echilibru). Cinematica se ocupa de problema miscariiunui sistem de puncte fara a tine seama de fortele ce actioneaza asupra lui. Dinamicastudiaza miscarea sistemelor de puncte materiale tinand seama de fortele care actioneazaasupra lor.
Axiomele fortei
Caracterizarea formala a fortei poate fi facuta cu ajutorul a doua postulate care sebazeaza pe o serie de observatii experimentale :
1. Forta aplicata ıntr-un punct al unui sistem material este un vector legat, adica aremarime, directie, sens si punct de aplicatie ;
2. Actiunea a doua forte care actioneaza ın acelasi punct poate fi ınlocuita cu actiuneaunei singure forte reprezentata de diagonala paralelogramului construit cu fortele componentesi reciproc, actiunea unei forte ıntr-un punct poate fi ınlocuita prin actiunea a doua fortereprezentate de laturile paralelogramului a carui diagonala este forta data.
Prin postularea existentei unui sistem de forte echivalent cu actiunea unui camp, estedefinit implicit la orice moment t cate un vector F ın orice punct al domeniului ın care semanifesta campul. In consecinta un camp fizic poate fi ınlocuit printr-un camp de vectoriF(t, r), iar daca F nu depinde explicit de timp, se spune ca campul este stationar.
Momentul unei forte
Prin definitie, momentul unei forte F avand punctul de aplicatie ın A, ın raport cu unpunct O, este egal cu produsul vectorial dintre OA si F :
MO(F) = OA× F = r× F (1.19)
Se observa ca momentul respectiv este o marime vectoriala, avand directia perpendicularape planul determinat de vectorii OA si F si orientata astfel ıncat vectorii OA, F si MO(r)sa formeze un triedru drept. Momentul fortei F este nul cand unul din factorii care ıl

18 CAPITOLUL 1. CONCEPTE GENERALE
Figura 1.3: Momentul fortei
compun este nul sau cand unghiul dintre OA si F este nul, adica atunci cand suportulfortei trece prin originea O.
La o modificare a originii din O ın O′, rezulta :
MO′(F) = O′A× F = (O′O + OA)× F = O′O× F + MO(F) (1.20)
deci momentul este un vector legat. Momentul nu se modifica daca |O′O| = |F| = 0 saudaca O′O ‖ F . Deci momentul fortei F ramane invariant ın raport cu orice punctde pe o dreapta paralela cu suportul fortei. Din (1.20) rezulta ca scalarul F ·MO(F)ramane invariant la modificarea originii :
F ·MO′(F) = F · (O′O× F)︸ ︷︷ ︸0
+F ·MO(F) = F ·MO(F) (1.21)
In cazul unui sistem de forte concurente ın A se poate arata usor ca suma momentelorfortelor concurente ın raport cu punctul O este egal cu momentul rezultantei vectorilorF =
∑
i
Fi ın raport cu acelasi punct O (teorema lui Varignon) :
∑
i
MO(Fi) =∑
i
(OA× Fi) = OA×(∑
i
Fi
)= OA× F (1.22)
Ansamblul de vectori F si MO(F) formeaza torsorul fortei F ın punctul O .
Lucrul mecanic
Efectul unei forte poate fi masurat prin lucrul mecanic pe care aceasta este capabila sa ılefectueze. Prin definitie lucrul mecanic pe care forta F ıl efectueaza la o deplasare finitaa unui punct material ıntre doua stari (1) si (2) este dat de integrala curbilinie :
L12 =
(2)∫
(1)
F · dr =
(2)∫
(1)
(Fxdx + Fydy + Fzdz) (1.23)
Unei deplasari elementare ıi corespunde marimea :
dL = F · dr = Fxdx + Fydy + Fzdz (1.24)

1.4. FORTA 19
care poarta numele de lucru mecanic elementar. Marimea :
P =dLdt
= F · dr
dt= F · v (1.25)
care reprezinta lucrul mecanic efectuat ın unitate de timp, poarta numele de putere. Esteevident din proprietatea de distributivitate a produsului scalar, ca daca mai multe forteactioneaza asupra punctului material, atunci lucrul mecanic efectuat de acestea va fi egal cusuma lucrurilor mecanice efectuate de fiecare forta ın parte.
Daca F reprezinta un camp vectorial potential stationar∂F
∂t= 0, adica daca exista
o functie scalara V (r) astfel ıncat F = − gradV si∂V
∂t= 0, atunci :
L12 = −(2)∫
(1)
∇V · dr = −(2)∫
(1)
(∂V
∂xdx +
∂V
∂ydy +
∂V
∂zdz
)= −
(2)∫
(1)
dV = V1 − V2 (1.26)
Se observa ca lucrul mecanic efectuat de o astfel de forta potentiala la o deplasare finita nudepinde de forma drumului prin care punctul trece din starea (1) ın starea (2), ci doar decapetele lui. In acest caz dL este o diferentiala totala exacta, iar functia de potentialV reprezinta o functie de stare. Prin functie de stare se ıntelege o functie care depindenumai de starea sistemului la un moment dat si nu si de modul ın care sistemul a ajunsın starea respectiva. Campurile de forte potentiale stationare se mai numesc si campuriconservative deoarece, dupa cum se va arata ulterior, ıntr-un astfel de camp energia me-canica totala a sistemului se conserva. In analiza vectoriala se arata ca conditia necesara sisuficienta pentru ca un camp de forte F(r) sa fie potential, este ca ∇× F = rotF = 0.
Sisteme de forte
Se considera un sistem de puncte materiale Pi (i = 1, 2, . . . , N) avand vectorii de pozitieri, asupra carora actioneaza fortele Fi. Prin definitie, vectorul :
F =N∑
i=1
Fi (1.27)
poarta numele de rezultanta sistemului de forte, iar vectorul
MO(F) =N∑
i=1
(ri × Fi) (1.28)
se numeste momentul rezultant ın O al sistemului de forte. Ansamblul de vectori F siMO(F) definiti cu (1.27) si (1.28) poarta numele de torsorul ın O al sistemului de forte.
Din definitie rezulta ca rezultanta este independenta de alegerea reperului, fiind un vec-tor liber, ın schimb momentul rezultant depinde de locul unde este aleasa originea O areperului. Se verifica direct ca :
MO′(F) =N∑
i=1
(O′O + ri)× Fi = O′O×N∑
i=1
Fi +N∑
i=1
(ri × Fi) = O′O× F + MO(F) (1.29)

20 CAPITOLUL 1. CONCEPTE GENERALE
Este ınsa evident ca scalarul torsorului F ·MO(F) este invariant la alegerea reperului. Dinaceste proprietati rezulta ca daca ıntr-un punct oarecare din spatiu rezultanta si momentulrezultant sunt niste vectori nuli, ei vor fi nuli ın orice punct al spatiului.
Daca ın punctele Pi sunt aplicate mai multe forte Fij (j = 1, 2, . . . , ni), atunci mai ıntai
se compun aceste forte ın una singura Fi =ni∑
j=1
Fij, conform axiomei a doua a fortelor. Prin
aceasta nu se modifica nici rezultanta, datorita proprietatii de asociativitate a sumei si nicimomentul rezultant, datorita proprietatii de distributivitate a produsului vectorial.
Ca aplicatie calculam rezultanta si momentul rezultant al greutatii G a unui sistem depuncte materiale. Deoarece greutatea unui punct de masa mi este mig, rezulta :
G =N∑
i=1
mig =
(N∑
i=1
mi
)· g = M g
MO(G) =N∑
i=1
(ri ×mig) =
(N∑
i=1
miri
)× g = M rc × g = rc ×Mg = rc ×G
(1.30)
unde rc reprezinta vectorul de pozitie al centrului de masa pentru sistemul de puncte mate-riale.
In cazul unui continuu material continut ıntr-un domeniu D al spatiului si situat ıncampul de forte F(r), formulele (1.27) si (1.28) devin :
F =∫
D
f dm =∫
D
ρ f dv
MO(F) =∫
D
(r× f) dm =∫
D
(r× ρ f) dv(1.31)
unde f reprezinta forta pe unitatea de masa, ρ este masa specifica si r vectorul de pozitieın raport cu originea O al unui punct curent P aflat ın domeniul D. In cazul fortelor decontact distribuite continuu (presiunea unui fluid asupra unui corp este echivalenta cu odistributie continua de forte aplicate pe suprafata corpului ın contact cu fluidul), rezultantasi momentul rezultant vor fi date de expresiile :
F =∫
Σ
T dσ ; MO(F) =∫
Σ
(r×T) dσ (1.32)
unde T este forta pe unitate de suprafata numita si tensiune, iar Σ este suprafata caredelimiteaza domeniul ocupat de corp si asupra caruia actioneaza fortele de contact distribuitecontinuu.
1.5 Cinematica punctului
Modul ın care, pornind de la cateva concepte generale, pot fi deduse coerent proprietatileunor marimi mecanice cunoscute ınca din scoala, va fi ilustrat prin prezentarea unor elementede cinematica punctului.

1.5. CINEMATICA PUNCTULUI 21
Traiectoria punctului, viteza
Admitand ca spatiul este tridimensional, omogen si izotrop, pozitia unui punct P ınraport cu un reper fix este precizata prin vectorul sau de pozitie r , care ın sistemul cartezianare coordonatele scalare x, y, z :
r = x · i + y · j + z · k (1.33)
Presupunand ın plus ca timpul t se scurge uniform spre valori pozitive de la o originearbitrara de masurare, daca punctul P ocupa la fiecare moment o alta pozitie ın spatiu,vectorul de pozitie al punctului devine functie de parametrul t :
r = r(t) (1.34)
ceea ce reprezinta ecuatia vectoriala a traiectoriei punctului P . Avand ın vedere (1.33),din (1.34) rezulta ecuatiile parametrice ale traiectoriei :
x = x(t)y = y(t)z = z(t)
(1.35)
Ecuatia propriu-zisa (carteziana) a traiectoriei rezulta prin eliminarea succesiva a parame-trului t, ea reprezentand curba dupa care se intersecteaza doua suprafete avand ecuatiilegenerale ϕ(x, y, z) = 0 si ψ(x, y, z) = 0 .
Figura 1.4: Traiectoria punctului, viteza
Prin definitie, viteza medie a punctului P ın intervalul de timp ∆t , este :
vm =∆r
∆t(1.36)
Viteza momentana a punctului P la momentul t se obtine facand ∆t → 0 :
v = lim∆t→0
∆r
∆t= lim
∆t→0
r(t + ∆t)− r(t)
∆t=
dr
dt= r (1.37)

22 CAPITOLUL 1. CONCEPTE GENERALE
Este evident (v. Fig. 1.4.b) ca vectorul v este orientat dupa tangenta la traiectorie ın Psensul fiind dat de directia ın care decurge miscarea.
Din definitia (1.37) si folosind (1.33), rezulta :
v = vx · i + vy · j + vz · k = x · i + y · j + z · k (1.38)
adica proiectia vitezei pe una din axe este egala cu viteza proiectiei vectorului de pozitie peaxa respectiva (afirmatia este adevarata numai ın sistemul de referinta cartezian!). Marimeavitezei va fi :
v ≡ |v| =√
x2 + y2 + z2 (1.39)
Rezultate similare pot fi obtinute pornind de la ecuatia orara a miscarii . Daca traiec-toria este o curba continua, rectificabila, care are ın fiecare punct o tangenta unica, pozitiaunui punct P pe traiectorie poate fi determinata cunoscand valoarea s a arcului socotit pecurba ıncepand de la o origine data P0 a arcelor, precum si sensul pozitiv de masurare alarcelor :
s = s(t) (1.40)
Eliminand timpul din ecuatiile (1.34) si (1.40), se va putea scrie ca :
r = r(s) (1.41)
din definitia (1.37), rezultand :
v =dr
dt=
dr
ds
ds
dt= s τ (1.42)
undedr
ds= τ (1.43)
reprezinta versorul tangentei la traiectorie ın P , orientata ın sensul pozitiv de masurare alarcelor (v. Fig. 1.4.c). Marimea vitezei va fi :
v = |s| (1.44)
deoarece derivata s poate fi pozitiva sau negativa, dupa cum la momentul respectiv punctulP se deplaseaza pe traiectorie ın acelasi sens, sau ın sens contrar, cu cel de masurare alarcelor.
Hodograful miscarii, acceleratia
Daca este data traiectoria miscarii r = r(t) si daca se cunoaste ın fiecare punct al traiec-toriei vectorul viteza momentana, poate fi construit ıntr-un punct O din spatiu un sistem devectori concurenti, astfel ıncat fiecare sa fie egal si paralel cu una din vitezele v(t) pe care leia succesiv punctul material pe traiectorie (v. Fig. 1.5). Unind extremitatile acestor vectorise obtine o curba numita hodograful miscarii . Un punct A se va deplasa pe aceasta curbacu o anumita viteza. Prin analogie, viteza momentana a lui A la momentul t va fi notata cuv , vectorul reprezentand viteza de variatie a vitezei punctului material, adica acceleratiapunctului :
a(t) = v(t) = r(t) (1.45)

1.5. CINEMATICA PUNCTULUI 23
Figura 1.5: Hodograful miscarii
Componentele carteziene ale vectorului acceleratie vor rezulta din egalitatea :
a = ax · i + ay · j + az · k = x · i + y · j + z · k (1.46)
iar marimea acestui vector la un moment dat va fi :
a ≡ |a| =√
x2 + y2 + z2 (1.47)
Daca traiectoria punctului este o curba plana, atunci si hodograful miscarii este tot o curbaplana, forma celor doua curbe fiind ınsa ın general esential diferita.
In ceea ce priveste orientarea ın spatiu a vectorului acceleratie momentana, unicul lucrucare poate fi afirmat ın acest stadiu al rationamentului este ca acesta trebuie sa fie tangent lahodograful miscarii, observatia fiind nesemnificativa din punct de vedere intuitiv. Apelanddin nou la ecuatia orara a miscarii, care a condus la rezultate corecte pentru precizareaorientarii ın spatiu a vectorului viteza, se va putea scrie succesiv :
a =d2r
dt2=
d
dt
(dr
dt
)=
d
dt
(dr
ds
ds
dt
)=
d
dt(s τ ) = s τ + s
(dτ
ds
ds
dt
)= s τ + s2 dτ
ds(1.48)
Derivatadτ
dsreprezinta vectorul de curbura ın punctul P , marimea si orientarea sa fiind
data de prima formula a lui Frenet :
dτ
ds=
1
ρν (1.49)
Aici ρ reprezinta raza de curbura ın punctul P , iar ν este versorul normalei principalecare este orientata ıntotdeauna spre centrul de curbura C (v. Fig. 1.6). Folosind formula(1.49), expresia acceleratiei devine :
a = s τ +s2
ρν (1.50)

24 CAPITOLUL 1. CONCEPTE GENERALE
Figura 1.6: Centrul de curbura
Astfel, vectorul acceleratie se gaseste tot timpul ıntr-un plan determinat de tangenta sinormala principala la traiectorie ın punctul respectiv, numit plan osculator . Componenteleacceleratiei pe cele doua directii reciproc perpendiculare vor fi (v. Fig. 1.7) :
- acceleratia tangentiala : aτ = s
- acceleratia normala : aν =s2
ρ=
v2
ρ
(1.51)
marimea vectorului acceleratie fiind data de expresia :
a =√
a2τ + a2
ν =
√s 2 +
s4
ρ2=
√s 2 +
v4
ρ2(1.52)
Figura 1.7: Planul osculator
Formulele lui Frenet
Fie Γ o curba ale carei puncte P sunt determinate de lungimea arcului corespunzator ssocotit de la o origine P0. Unghiul format de versorii τ si τ ′ ‖ τ ′′ ın doua puncte ınvecinateva fi notat cu ε si poarta numele de unghi de contingenta. Prin definitie, curbura curbeiΓ ın punctul P este :
C = lim∆s→0
ε
∆s; ∆s =
_PP ′ (1.53)

1.5. CINEMATICA PUNCTULUI 25
Figura 1.8: Raza de curbura si normala principala
Raza de curbura ın punctul P este inversa curburii :
ρ =1
C= lim
∆s→0
∆s
ε(1.54)
Planul determinat de versorul τ ın P si versorul τ ′′ prin P paralel la versorul τ ′ ın P ′ tindela planul osculator al curbei ın P atunci cand ∆s → 0 . Daca curba Γ este plana, planulosculator coincide cu planul curbei.
Variatia vectorului τ cand se trece din P ın P ′ este vectorul ce uneste extremitatile luiτ si τ ′′ si are valoarea absoluta |∆τ | ' 1 · ε = ε. La limita, pentru ∆s → 0 se obtine :
dτ
ds= ν · lim
∆s→0
ε
∆s= C · ν (1.55)
unde ν este versorul normalei la curba ın punctul P si este dirijat spre concavitatea curbei.Axa care trece prin P si are versorul ν poarta numele de normala principala a curbei.Folosind (1.54), formula anterioara se mai scrie :
dτ
ds=
1
ρν (1.56)
si reprezinta prima formula a lui Frenet . Punctul C situat pe normala principala ladistanta ρ de P ın sensul lui ν poarta numele de centru de curbura .
Fie β versorul normalei ın P la planul osculator, asa ıncat β = τ × ν . Directia definitade versorul β poarta numele de binormala . Din relatia evidenta β · τ = 0 rezulta :
τdβ
ds+ β
dτ
ds= 0 (1.57)
adica :
τdβ
ds= −C β ν = 0 (1.58)
Pe de alta parte, din relatia β · β = 1 rezulta :
βdβ
ds= 0 (1.59)

26 CAPITOLUL 1. CONCEPTE GENERALE
Deoarece vectoruldβ
dseste perpendicular atat pe τ cat si pe β , el trebuie sa aiba directia
lui ν , adica :dβ
ds= −T ν (1.60)
unde T este un scalar. Semnul lui T este ales astfel ıncat T sa fie pozitiv pentru o rotatiepozitiva a triedrului drept determinat de versorii τ , ν si β ın jurul lui τ . In cazul curbelorplane, cand dβ = 0, rezulta T = 0 . Scalarul T definit astfel poarta numele de torsiunea
curbei ın P . Inversul torsiunii poarta numele de raza de torsiune ρ′ =1
T. Expresia
(1.60) este cunoscuta sub numele de a doua formula a lui Frenet.A treia formula a lui Frenet se obtine prin derivarea relatiei ν = − τ × β. Rezulta :
dν
ds= − dτ
ds× β − τ × dβ
ds= −C (ν × β) + T (τ × ν) = −C τ + T β (1.61)
adica :dν
ds= − 1
ρτ +
1
ρ′β (1.62)
Tangenta, normala principala si binormala formeaza axele unui triedru drept, mobil odatacu P . El este numit triedru mobil, triedru natural, sau triedrul lui Frenet . Dupa cums-a vazut, elementele miscarii pot fi raportate si la acest triedru intrinsec :
vτ = s , vν = 0 , vβ = 0
aτ = s , aν =s2
ρ=
v2
ρ, aβ = 0
(1.63)
Clasificarea miscarilor
In functie de valorile pe care le pot lua componentele acceleratiei ın planul osculator, potfi facute cateva observatii interesante :
a) aτ = 0 deci s = 0 si v = |s| = const . Miscarea curbilinie este uniforma .b) sgn aτ = sgn s . Acceleratia tangentiala fiind orientata ın sensul miscarii, viteza creste
ın valoare absoluta si miscarea este accelerata.
Intr-adevar, deoarece aτ =ds
dtsi observand ca ıntotdeauna dt > 0 , din aτ > 0 si s > 0
rezulta ds = d|s| = dv > 0 . Rationand analog ın cazul aτ < 0 si s < 0 , rezulta ds =− d|s| < 0 , adica tot d|s| = dv > 0 .
c) sgn aτ 6= sgn s . Reluand rationamentul anterior, se arata ca viteza scade ın valoareabsoluta si deci miscarea este ıncetinita (decelerata) .
d) aτ = const . Miscarea este uniform variata , ea putand fi uniform accelerata sauuniform ıncetinita .
e) Deoarece aν =v2
ρ> 0 , acceleratia normala este orientata ıntotdeauna spre centrul de
curbura .f) aν = 0 . Admitand ca v 6= 0 , situatia este posibila numai daca ρ → ∞ , adica ın
punctele de inflexiune ale traiectoriei, sau cand miscarea este rectilinie .g) Singura miscare pentru care acceleratia este nula este miscarea rectilinie si uni-
forma, deoarece a = 0 numai daca simultan aν = 0 si aτ = 0 .

1.5. CINEMATICA PUNCTULUI 27
Viteza areolara
Daca la momentul t, vectorul de pozitie al unui punct P de pe traiectorie este r , iarviteza sa este v , atunci prin definitie vectorul viteza areolara Ω are expresia :
Ω =1
2(r× v) (1.64)
Figura 1.9: Viteza areolara
Interpretarea geometrica a marimii acestui vector se bazeaza pe observatia ca
dA =1
2| r× dr | (1.65)
reprezinta aria maturata de vectorul de pozitie r la o deplasare elementara dr a punctuluiP pe traiectorie (v. Fig. 1.9). Pentru deducerea formulei (1.65) s-a folosit proprietateaprodusului vectorial | a × b | = |a| |b| sin(a,b) . Folosind aceasta observatie, din (1.64)rezulta :
|Ω | = dA
dt(1.66)
deci marimea vitezei areolare reprezinta viteza de variatie a ariei maturate de vectorul depozitie al punctului.
Componentele vitezei si acceleratiei ın coordonate curbilinii ortogonale
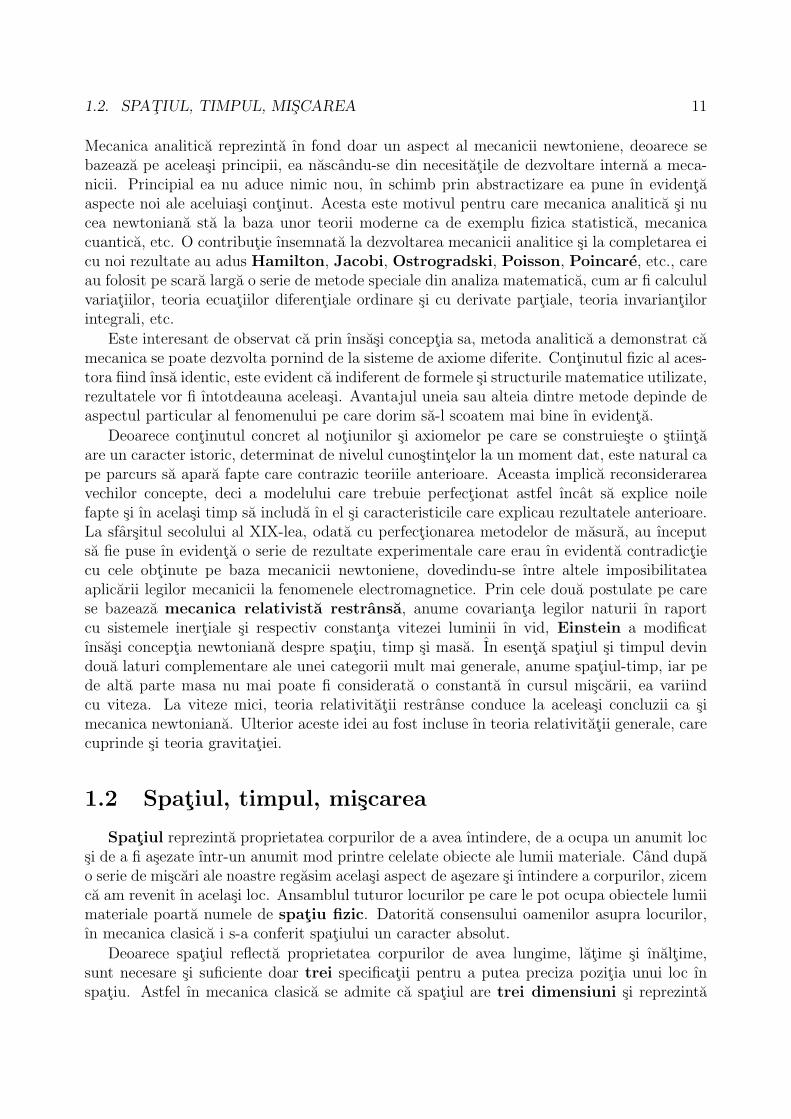
1. Coordonate polare (r , θ). Notand cu er versorul vectorului de pozitie al punctului si cueθ versorul unei directii perpendiculare pe er orientata ın sensul ın care θ creste, folosind figurarezulta :
28 CAPITOLUL 1. CONCEPTE GENERALE
er = cos θ i + sin θ j
eθ = − sin θ i + cos θ j(1)
Prin derivare dupa timp se obtine :
er = θ (− sin θ i + cos θ j) = θ eθ
eθ = − θ (cos θ i + sin θ j) = − θ er
(2)
Pornind de la expresia vectorului de pozitie al punctului P ın coordonate polare r = r er, rezultaprin derivari succesive dupa timp si folosind (2) expresiile :
v = r = r er + r er = r er + rθ eθ
a = r = r er + r er + (rθ + rθ)eθ + rθ eθ =
= (r − rθ2) er + (2rθ + rθ) eθ
(3)
In consecinta, componentele vitezei si acceleratiei punctului ın coordonate polare vor fi :
vr = r
vθ = rθ;
ar = r − rθ2
aθ = 2rθ + rθ(4)
In particular, daca traiectoria este un cerc de raza R, deci daca miscarea este circulara, atunci(r = R , r = 0) :
vr = 0
vθ = Rθ = Rω;
ar = −Rθ2 = −Rω2
aθ = Rθ = Rω = Rε(5)
Se confirma astfel faptul ca ın miscarea circulara viteza are componenta numai dupa tangenta latraiectorie, iar acceleratia are componente atat pe tangenta, cat si pe raza vectoare, cea din urmafiind orientata spre centrul cercului. Daca ın plus miscarea circulara este si uniforma (ω = 0) seobtin rezultatele cunoscute :
vr = 0
vθ = Rω;
ar = −Rω2
aθ = 0(6)
Daca traiectoria este continuta ın planul xOy , atunci se deduce usor urmatoarea expresie ıncoordonate polare a vitezei areolare :
Ω =1
2(r× v) =
1
2
[r er × (r er + rθ eθ)
]=
1
2rr (er × er)︸ ︷︷ ︸
0
+1
2r2θ (er × eθ) (7)

1.5. CINEMATICA PUNCTULUI 29
deci :
Ω =1
2r2θ k (8)
unde k este un versor perpendicular pe planul determinat de versorii er si eθ, adica viteza areolaraeste orientata dupa axa Oz . Se verifica direct ca :
|Ω | = 1
2r2θ (9)
reprezinta aria maturata de raza vectoare ın unitate de timp.
2. Coordonate sferice (r , θ , ϕ). Notand cu er versorul vectorului de pozitie al punctuluiP , cu eθ versorul tangentei la meridian ın sensul ın care θ creste si cu eϕ versorul tangentei laparalela ın P cu orientarea ın sensul ın care ϕ creste, folosind figurile rezulta :
er = sin θ e + cos θ k = sin θ (cos ϕ i + sin ϕ j) + cos θ k
eθ = cos θ e− sin θ k = cos θ (cos ϕ i + sin ϕ j)− sin θ k
eϕ = − sin ϕ i + cos ϕ j
(10)
Prin derivare dupa timp se obtine :
er = θ cos θ (cos ϕ i + sin ϕ j) + ϕ sin θ (− sin ϕ i + cos ϕ j)− θ sin θ k =
= θ eθ + ϕ sin θ eϕ
eθ = − θ sin θ (cos ϕ i + sin ϕ j) + ϕ cos θ (− sin ϕ i + cos ϕ j)− θ cos θ k =
= − θ er + ϕ cos θ eϕ
eϕ = − ϕ (cos ϕ i + sin ϕ j) = − ϕ (sin θ er + cos θ eθ)
= − ϕ sin θ er − ϕ cos θ eθ
(11)

30 CAPITOLUL 1. CONCEPTE GENERALE
Deoarece r = r er , prin derivari succesive dupa timp si folosirea expresiilor (11), rezulta :
v = r = r er + r er = r er + rθ eθ + rϕ sin θ eϕ
a = r = r er + r er + (rθ + rθ) eθ + rθ eθ +
+ (rϕ sin θ + rϕ sin θ + rθϕ cos θ) eϕ + rϕ sin θ eϕ =
= (r − rθ2 − rϕ2 sin2 θ) er + (2rθ + rθ − rϕ2 sin θ cos θ) eθ +
+ (2rϕ sin θ + 2rθϕ cos θ + rϕ sin θ) eϕ
(12)
In consecinta, componentele vitezei si acceleratiei punctului ın coordonate sferice vor fi :
vr = r
vθ = rθ
vϕ = rϕ sin θ
;
ar = r − rθ2 − rϕ2 sin2 θ
aθ = 2rθ + rθ − rϕ2 sin θ cos θ
aϕ = 2rϕ sin θ + 2rθϕ cos θ + rϕ sin θ
(13)
Capitolul 2
Principiile Galilei-Newton
2.1 Enunturi
La baza mecanicii clasice sta principiul inertiei , pus ın evidenta experimental de Galileisi formulat matematic de Newton ca prima lege a mecanicii :
”Orice corp ısi pastreaza starea de repaus sau de miscare rectilinie uniforma,daca asupra lui nu actioneaza forte care sa-i modifice starea.”
In acest enunt prin corp se ıntelege un punct material. Trebuie observat ca ın realitateun corp se gaseste ıntotdeauna ın interactiune cu un alt corp din Univers, ınsa aceastainteractiune poate fi micsorata (prin ındepartarea corpului respectiv), anulata (prin actiuneaunui alt corp), iar interactiunile care nu pot fi anulate (ca de exemplu frecarile) pot fi facuteoricat de mici utilizand metode tehnice adecvate. Prin abstractizarea si generalizarea unorastfel de observatii se ajunge la principiul enuntat anterior.
Starile de repaus si de miscare rectilinie uniforma sunt considerate ca reprezentandstari naturale de comportare a corpurilor asupra carora nu actioneaza forte. Postulareaposibilitatii unui corp de a ramane un timp nedefinit ın una din aceste stari naturale, ınabsenta fortelor exterioare, conduce la proprietatea numita inertie intrinseca a corpurilor.Definind masa m ca masura a inertiei corpului, respectiv ca masura a modului ın care corpulse opune variatiei starii sale naturale, precum si impulsul (cantitatea de miscare) p caprodusul dintre masa si viteza : p = mv , enuntul matematic al principiului inertiei se reducela expresia :
p = const. (2.1)
Deoarece din principiul inertiei rezulta ca poate exista miscare si ın absenta fortelor, nuse poate stabili o legatura directa ıntre viteza si forta, asa cu credea Aristotel. Se sugereazaastfel ideea ca nu miscarea, ci variatia miscarii ar trebui sa fie proportionala cu forta.
Principiul inertiei nu permite determinarea concreta a starii de repaus sau de miscarerectilinie si uniforma a corpului. In acest sens Galilei a facut observatia ca pentru a cunoasteprecis starea corpului la orice moment, vor trebui cunoscute pozitia si viteza sa la un mo-ment dat. Notand cu t0 momentul ın care ıncepe miscarea pe care vrem sa o determinam,pozitia si viteza punctului la momentul t0 definesc starea initiala : r(t0) si v(t0) = r(t0) .Principiul conditiilor initiale afirma ca starea initiala a corpului determina ın modunic miscarea acestuia. Folosind o dezvoltare ın serie Taylor, la un moment t ulterior lui
31

32 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
t0 , dar suficient de apropiat, se poate scrie :
r(t) = r(t0) +(t− t0)
1!r(t0) +
(t− t0)2
2!r(t0 + ε∆t) ; ∆t = t− t0 , 0 < ε < 1 (2.2)
Se observa ca daca se cunoaste starea initiala a corpului, pentru determinarea miscarii aces-tuia este necesara si cunoasterea acceleratiei sale (v. ultimul termen), daca aceasta estediferita de zero. Astfel, si acest principiu sugereaza existenta unei legaturi dintre forta sivariatia miscarii.
In conformitate cu observatiile care decurg din primele doua principii, poate fi postulatcel de al treilea principiu care sta la baza mecanicii, anume principiul actiunii fortelor,cunoscut si sub numele de legea a doua a lui Newton :
”Variatia miscarii este proportionala cu forta motoare imprimata si este di-rijata dupa linia dreapta ın lungul careia este imprimata forta.”
Daca F este forta care actioneaza asupra corpului, expresia matematica a principiuluieste data de ecuatia :
p =dp
dt= F (2.3)
constanta de proportionalitate ın (2.3) fiind considerata unitatea. Postuland ın mecanicaclasica ca masa m = const. , ecuatia (2.3) se mai scrie :
m v = m a = F (2.4)
unde ın general forta F = F(t, r, r) este considerata ın mecanica ca fiind data. Din (2.3)rezulta ca forta F ar reprezenta o masura a interactiunii corpului cu mediul, ınsa trebuieobservat ca forta nu poate fi considerata ca o masura universala a interactiunii, deoareceexista situatii ın care interactiunea nu poate fi caracterizata printr-o forta.
Legea a doua a lui Newton se bazeaza de asemenea pe o serie de observatii experimentale.Daca se studiaza alunecarea fara frecare a unui corp pe un plan ınclinat, se verifica usor cavariatia vitezei este proportionala cu componenta greutatii ın lungul planului si ca ea esteorientata dupa directia fortei. Pe de alta parte, se stie ca pentru a scoate un corp din stareasa naturala, este necesara o forta cu atat mai mare, cu cat masa sa inerta este mai mare. Seajunge astfel intuitiv la o ecuatie de tipul (2.4).
Un alt principiu fundamental al mecanicii este cel referitor la egalitatea actiunii sireactiunii. Cunoscut si sub numele de legea a treia a lui Newton, el se enunta dupacum urmeaza :
”Actiunile reciproce a doua corpuri sunt ıntotdeauna egale si dirijate ın sen-suri contrare.”
Considerand doua puncte materiale A1 si A2 ın interactiune, notand cu F12 actiunea pecare o exercita A2 asupra lui A1 si cu F21 actiunea lui A1 asupra lui A2 , conform enuntuluiva trebui ca :
F12 + F21 = 0 ; F12 ‖ A1A2 (2.5)
Deoarece actiunea implica existenta unei reactiuni egale si de sens contrar, daca F12 repre-zinta actiunea lui A2 asupra lui A1 , atunci F21 va reprezenta reactiunea corpului A1 .Rolul lui A2 poate fi jucat si de un camp extern.

2.2. PROBLEMA DETERMINARII MISCARII 33
Insasi legea a doua a lui Newton, scrisa sub forma :
F−m a = 0 (2.6)
poate fi interpretata pe baza principiului enuntat mai sus : daca F este forta exercitata de unagent extern asupra punctului material, atunci punctul produce o reactiune, o forta aplicataagentului, egala cu −m a . Forta −m a poarta numele de forta de inertie, ea fiind datoratainertiei punctului material.
Aceste principii sunt completate de obicei de principiul independentei actiuniifortelor, care stabileste ca diferitele forte la care este supus punctul materialactioneza independent . Astfel, mai multe forte care actioneaza simultan asupra punctuluipot fi ınlocuite cu rezultanta lor, si invers, o forta poate fi descompusa ın forte componentedupa mai multe directii concurente.
La enuntarea acestor principii s-a presupus existenta unui reper absolut si a unei cro-nologii absolute, la care este raportata miscarea. Se va arata ulterior ca aceste principii ısipastreaza valabilitatea pentru o clasa ıntreaga de repere, care vor fi numite inertiale .
Cele cinci principii enuntate ın acest paragraf, la care se adauga afirmatiile referitoarela spatiu, timp si masa, alcatuiesc un sistem complet de axiome care sunt puse la bazamecanicii clasice .
2.2 Problema determinarii miscarii
Admitand ca forta F(t, r, r) este o marime fizica data, proiectand ecuatia lui Newtonm r = F pe axele unui sistem cartezian de coordonate :
m x = Fx(t, x, y, z, x, y, z)
m y = Fy(t, x, y, z, x, y, z)
m z = Fz(t, x, y, z, x, y, z)
(2.7)
rezulta un sistem de trei ecuatii diferentiale de ordinul doi, cu conditiile initiale :
x(t0) = x0 , x(t0) = x0
y(t0) = y0 , y(t0) = y0
z(t0) = z0 , z(t0) = z0
(2.8)
Solutia sistemului (2.7) conduce la determinarea miscarii, adica a functiilor :
x = x(t)
y = y(t)
z = z(t)
(2.9)
Facand notatiile :
q1 = x , q2 = y , q3 = z , q4 = x , q5 = y , q6 = z
Q1 = x , Q2 = y , Q3 = z , Q4 =Fx
m, Q5 =
Fy
m, Q6 =
Fz
m
(2.10)

34 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
sistemul (2.7) se reduce la un sistem de sase ecuatii diferentiale de ordinul ıntai cu sasefunctii necunoscute qi = qi(t) ; i = 1, . . . , 6 :
qi = Qi(t, q1, q2, q3, q4, q5, q6) ; i = 1, . . . , 6 (2.11)
fiind cunoscute conditiile initiale :
qi(t0) = q0i ; i = 1, . . . , 6 (2.12)
Daca ın marimile Qi ; i = 1, . . . , 6 intervine explicit timpul, sistemul este neautonom , iardaca timpul nu intervine explicit ın marimile respective, sistemul este numit autonom saudinamic. Majoritatea fenomenelor mecanice sunt descrise de sisteme dinamice.
Problema integrarii sistemului (2.11) cu conditiile initiale (2.12) este cunoscuta ın mate-matica sub numele de problema Cauchy . Din teoria ecuatiilor diferentiale se stie ca dacafunctiile Qi(t, q1, . . . , q6) ; i = 1, . . . , 6 si deci si functiile Fx , Fy , Fz , sunt continue , atuncisolutia problemei Cauchy exista (teorema lui Peano). Solutia este unica , daca functiile
respective satisfac conditia lui Lipschitz , adica pentru orice pereche (q(1)1 , . . . , q
(1)6 ) si
(q(2)1 , . . . , q
(2)6 ) exista constantele pozitive Aj ; j = 1, . . . , 6 asa ıncat :
∣∣∣ Qi(t, q(1)1 , . . . , q
(1)6 )−Qi(t, q
(2)1 , . . . , q
(2)6 )
∣∣∣ ≤6∑
j=1
Aj
∣∣∣ q(1)j − q
(2)j
∣∣∣ ; i = 1, . . . , 6 (2.13)
Daca sistemul (2.11) este dinamic, si daca functiile Qi(q1, . . . , q6) ; i = 1, . . . , 6 si decisi functiile Fx(r, r) , Fy(r, r) , Fz(r, r) sunt de clasa C1 , atunci conditia lui Lipschitz esteıntotdeauna satisfacuta.
Daca sunt ındeplinite conditiile de existenta si unicitate, atunci solutia generala a siste-mului (2.11) depinde de sase constante de integrare :
qi = qi(t, C1, . . . , C6) ; i = 1, . . . , 6 (2.14)
care pot fi determinate impunand conditiile initiale (2.12) :
q0i = qi(t0, C1, . . . , C6) ; i = 1, . . . , 6 (2.15)
Odata cu teorema de existenta si unicitate se demonstreaza ca solutia (2.14) este de clasaC2, deci x, y, z sunt de clasa C2 si de asemenea ca :
∣∣∣∣∣∣∣∣∣∣∣∣
∂q01
∂C1
. . .∂q0
1
∂C6...
...∂q0
6
∂C1
. . .∂q0
6
∂C1
∣∣∣∣∣∣∣∣∣∣∣∣
=∂(q0
1, . . . , q06)
∂(C1, . . . , C6)6= 0 (2.16)
ceea ce ınseamna ca datele initiale ale problemei sunt independente si deci ca sistemul algebric(2.15) poate fi rezolvat ın raport cu necunoscutele Ci ; i = 1, . . . , 6 :
Ci = Ci(t0, q01, . . . , q
06) ; i = 1, . . . , 6 (2.17)

2.2. PROBLEMA DETERMINARII MISCARII 35
Solutia generala a sistemului (2.11) va fi astfel :
qi = fi(t, t0, q01, . . . , q
06) ; i = 1, . . . , 6 (2.18)
Revenind la notatiile fizice, solutia generala a sistemului (2.7) cu conditiile initiale (2.8)se scrie :
x = fx(t, t0, x0, y0, z0, x0, y0, z0)
y = fy(t, t0, x0, y0, z0, x0, y0, z0)
z = fz(t, t0, x0, y0, z0, x0, y0, z0)
(2.19)
In concluzie, daca forta satisface conditiile de existenta si unicitate pentrusolutie, atunci ecuatia lui Newton si conditiile initiale determina ın mod uni-voc miscarea, ıntr-un interval finit de timp .
Tot cu ajutorul ecuatiei lui Newton se defineste si conditia de echilibru a punctuluimaterial, sub influenta unor forte date. Se stie ca daca la momentul t0 pozitia punctuluieste r(t0) = r0 si viteza sa este v(t0) = 0 , iar la un moment ulterior t > t0 pozitia punctuluiramane aceeasi r(t) = r0 , atunci avem de a face cu o pozitie de echilibru. Scriind ca ecuatialui Newton este verificata de aceasta solutie, rezulta :
F(t, r0, 0) = 0 (2.20)
In baza teoremei de unicitate, ecuatia (2.20) reprezinta nu numai o conditie necesara , ci siuna suficienta de echilibru.
Pentru ca un punct material sa fie ın echilibru ıntr-o pozitie r0 , este nece-sar si suficient ca ın pozitia respectiva, rezultanta fortelor ce actioneaza asuprapunctului sa fie nula.
Trebuie observat ca daca F depinde explicit de timp, atunci ecuatia (2.20) nu admiteın general o solutie constanta r0 , oricare ar fi timpul t . Daca ınsa F nu depinde de timp,atunci din (2.20) rezulta, prin proiectare pe cele trei axe, un sistem algebric de trei ecuatiiscalare :
Fx(x0, y0, z0) = 0
Fy(x0, y0, z0) = 0
Fz(x0, y0, z0) = 0
(2.21)
care permite determinarea coordonatelor pozitiei de echilibru r0 .
Aplicatii
1. Sa se studieze miscarea unui punct material de masa m ın lungul axei Ox, daca asupra luiactioneaza o forta care se opune miscarii si a carei marime este proportionala cu patratul vitezeimomentane. Se cunosc conditiile initiale x(t0) = x0 si x(t0) = x0.
Rezolvare : Conform enuntului, ecuatia de miscare are forma generala :
m x = − k x2 ; k > 0 (1)
Transcriind ecuatia sub forma :dx
x2= − k
mdt (2)
36 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
prin integrare dupa timp :x(t)∫
x(t0)
1
x2dx = −
t∫
t0
k
mdt (3)
rezulta :1
x0
− 1
x= − k
m(t− t0) (4)
unde s-a tinut cont de conditia initiala x(t0) = x0 . Dependenta de timp a vitezei punctului va fiastfel :
x(t) =x0
1 +kx0
m(t− t0)
(5)
Integrand ınca odata dupa timp si tinand cont de conditia initiala x(t0) = x0, rezulta :
x(t) = x0 +m
kln
[1 +
kx0
m(t− t0)
](6)
Dependenta de timp a acceleratiei va fi data de expresia :
x(t) = − k
mx2 = − k
m
x0
1 +kx0
m(t− t0)
2
(7)
Se observa ca :
limt→∞ x(t) = 0 , lim
t→∞ x(t) = 0 si limt→∞x(t) = ∞ (8)
Deoarece este evident ca punctul se va opri dupa un interval de timp finit, rezultatul apareparadoxal, ınsa el este corect ın limitele ipotezei facute ın enunt. In realitate, rezistenta mediuluieste proportionala cu patratul vitezei doar la viteze mari, dependenta devenind mult mai lenta pemasura ce scade viteza.
2. Un punct material de masa m se misca ın planul vertical xOz. El se afla sub actiunea forteigravitationale G = mg, iar mediul exercita asupra sa o forta orientata ın sens opus miscarii, directproportionala cu viteza momentana v. Cunoscand conditiile initiale r(t0) = r0 si v(t0) = v0,sa se determine ecuatia carteziana a traiectoriei. In cazul particular al aruncarii oblice ın sus, sase determine timpul de urcare, precum si coordonatele punctului ın care este atinsa altitudineamaxima.
Rezolvare : Proiectand ecuatia de miscare
mr = mg − kr ; k > 0 (1)
pe axele Ox si Oz, se obtine sistemul de ecuatii scalare :
x +k
mx = 0
z +k
mz = − g
(2)

2.2. PROBLEMA DETERMINARII MISCARII 37
Ecuatiile fiind independente, ele pot fi integrate separat. Solutiile generale x(t) si z(t) au expre-siile :
x = C1 e− k
mt
; z = C2 e− k
mt − mg
k(3)
Impunand conditiile initiale x(t0) = x0 si z(t0) = z0, rezulta ın final :
x(t) = x0 e− k
m(t− t0)
; z(t) =(z0 +
mg
k
)e− k
m(t− t0) − mg
k(4)
Integrand ınca odata dupa timp si luand ın considerare conditiile initiale x(t0) = x0 si z(t0) = z0,rezulta ecuatiile parametrice ale traiectoriei ın planul xOz :
x(t) = x0 +m
kx0
1− e
− k
m(t− t0)
z(t) = z0 − mg
k(t− t0) +
m
k
(z0 +
mg
k
)1− e
− k
m(t− t0)
(5)
Pentru a obtine ecuatia carteziana a traiectoriei z = z(x) va trebui eliminat timpul t. Dinecuatia (5a) rezulta :
1− e− k
m(t− t0)
=k
m
x− x0
x0
adica t− t0 = − m
kln
(1− k
m
x− x0
x0
)(6)
ceea ce ınlocuit ın (5b) va conduce ın final la expresia :
z = z0 +z0 +
mg
kx0
(x− x0) + g(
m
k
)2
ln
(1− k
m
x− x0
x0
)(7)
In cazul ın care corpul este aruncat oblic ın sus : x0 6= 0 si z0 > 0, atunci pentru valori ale luit ın vecinatatea lui t0 rezulta z > 0, iar pentru t suficient de mare ca trebui ca z < 0. Astfel la

38 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
ınceputul miscarii traiectoria este ascendenta, ca apoi sa devina descendenta. Timpul tu ın carepunctul material urca pe traiectorie va rezulta din impunerea conditiei z(tu) = 0 :
e− k
m(tu − t0)
=1
1 +kz0
mg
adica tu = t0 +m
kln
(1 +
kz0
mg
)(8)
Coordonatele punctului A ın care corpul atinge altitudinea maxima se determina ınlocuind ınsolutia generala (5) valoarea calculata a lui tu :
xA = x(tu) = x0 +x0z0
g
1
1 +kz0
mg
zA = z(tu) = z0 +m
kz0 − g
(m
k
)2
ln
(1 +
kz0
mg
) (9)
3. Sa se studieze proprietatile miscarii unui punct material de masa m asupra caruia actioneazao forta elastica F = − kr ; k > 0, conditiile initiale la momentul t0 = 0 fiind r0 si v0.(Oscilatorul armonic izotrop.)
Rezolvare : Ecuatia generala de miscare
mr = − kr ; k > 0 (1)
se transcrie ın forma simpla :
r + ω2r = 0 unde ω =
√k
m(2)
In coordonate carteziene solutia generala se exprima prin functii armonice :
r = C1 cos ωt + C2 sin ωt (3)
valorile constantelor C1 si C2 rezultand din impunerea conditiilor initiale :
r = r0 cos ωt +v0
ωsin ωt (4)
Se observa ca traiectoria este o curba ınchisa care se gaseste ın planul determinat de vectoriir0 si v0. Eliminand timpul cu relatia sin2 ωt + cos2 ωt = 1, va rezulta ecuatia unei elipse ınplanul xOy avand centrul ın origine. Miscarea pe elipsa este periodica, perioada miscarii fiind
T =2π
ω= 2π
√m
k. In plus, se verifica direct ca r× v = r0 × v0, ceea ce ınseamna ca ın cursul
miscarii viteza areolara se mentine constanta.Daca v0 = 0 sau r0 ‖ v0 solutia (4) descrie o miscare armonica unidimensionala (oscilator
armonic liniar). Admitand ca suportul miscarii este axa Ox, ecuatia (4) devine :
x = x0 cos ωt +v0
ωsin ωt = a cos(ωt− ϕ) unde
x0 = a cos ϕv0
ω= a sin ϕ
(5)
Aici a reprezinta amplitudinea miscarii, iar ϕ este faza initiala.
2.3. MISCAREA RELATIVA 39
2.3 Miscarea relativa
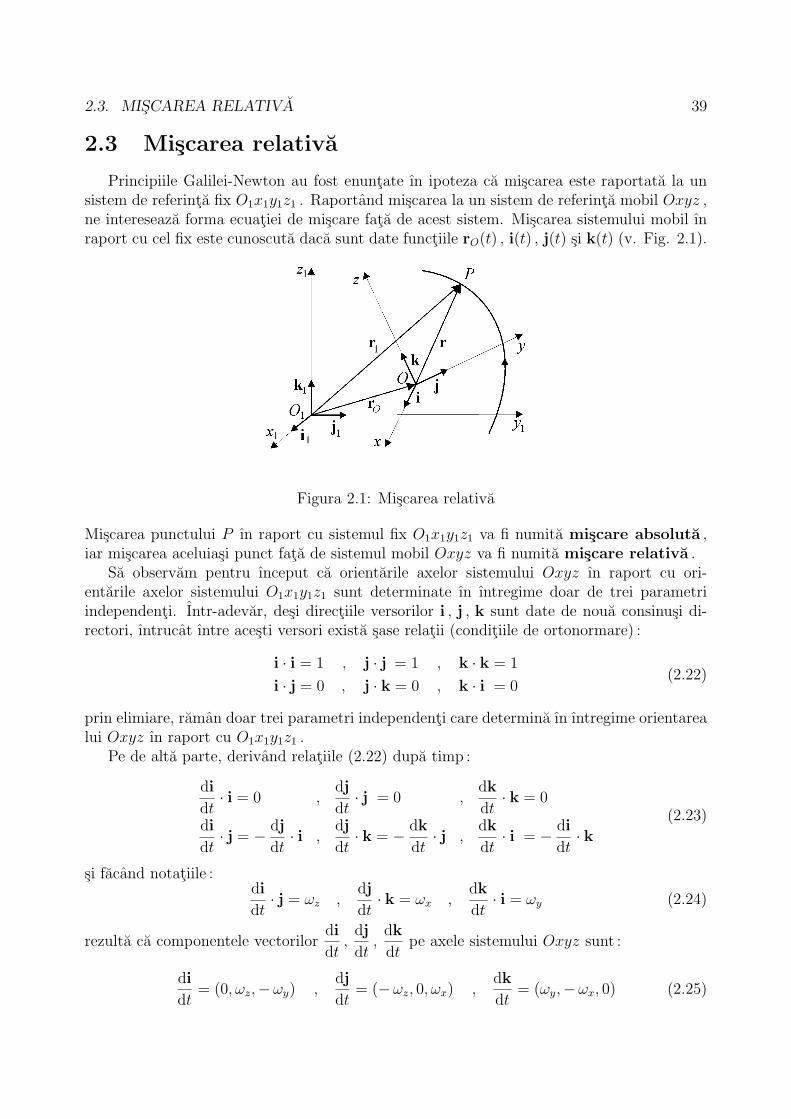
Principiile Galilei-Newton au fost enuntate ın ipoteza ca miscarea este raportata la unsistem de referinta fix O1x1y1z1 . Raportand miscarea la un sistem de referinta mobil Oxyz ,ne intereseaza forma ecuatiei de miscare fata de acest sistem. Miscarea sistemului mobil ınraport cu cel fix este cunoscuta daca sunt date functiile rO(t) , i(t) , j(t) si k(t) (v. Fig. 2.1).
Figura 2.1: Miscarea relativa
Miscarea punctului P ın raport cu sistemul fix O1x1y1z1 va fi numita miscare absoluta ,iar miscarea aceluiasi punct fata de sistemul mobil Oxyz va fi numita miscare relativa .
Sa observam pentru ınceput ca orientarile axelor sistemului Oxyz ın raport cu ori-entarile axelor sistemului O1x1y1z1 sunt determinate ın ıntregime doar de trei parametriindependenti. Intr-adevar, desi directiile versorilor i , j , k sunt date de noua consinusi di-rectori, ıntrucat ıntre acesti versori exista sase relatii (conditiile de ortonormare) :
i · i = 1 , j · j = 1 , k · k = 1
i · j = 0 , j · k = 0 , k · i = 0(2.22)
prin elimiare, raman doar trei parametri independenti care determina ın ıntregime orientarealui Oxyz ın raport cu O1x1y1z1 .
Pe de alta parte, derivand relatiile (2.22) dupa timp :
di
dt· i = 0 ,
dj
dt· j = 0 ,
dk
dt· k = 0
di
dt· j = − dj
dt· i ,
dj
dt· k = − dk
dt· j ,
dk
dt· i = − di
dt· k
(2.23)
si facand notatiile :di
dt· j = ωz ,
dj
dt· k = ωx ,
dk
dt· i = ωy (2.24)
rezulta ca componentele vectorilordi
dt,
dj
dt,
dk
dtpe axele sistemului Oxyz sunt :
di
dt= (0, ωz,−ωy) ,
dj
dt= (−ωz, 0, ωx) ,
dk
dt= (ωy,−ωx, 0) (2.25)

40 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
adica se va putea scrie (formulele lui Poisson) :
di
dt= ω × i ,
dj
dt= ω × j ,
dk
dt= ω × k (2.26)
unde vectorul ω(ωx, ωy, ωz) caracterizeaza rotatia la un moment dat a sistemului Oxyz ınraport cu O1x1y1z1 si de aceea poarta numele de vectorul rotatie . Componentele (2.24)ale acestui vector pot fi folosite de asemenea pentru a preciza orientatile axelor sistemuluimobil ın raport cu cele ale sistemului fix.
Figura 2.2: Rotatia cu unghiul ψ ın jurul axei Oz1
Semnificatia fizica a vectorului rotatie poate fi pusa foarte usor ın evidenta examinandcazul particular cand sistemul mobil se roteste ın raport cu cel fix cu unghiul ψ ın jurul axeiOz1 , care coincide cu axa Oz (v. Fig. 2.2) . Deoarece :
i = cos ψ i1 + sin ψ j1 ,di
dt= − ψ (− sin ψ i1 + cos ψ 1) = ψ j
j = − sin ψ i1 + cos ψ j1 ,dj
dt= − ψ ( cos ψ i1 + sin ψ 1) = − ψ i
k = k1 ,dk
dt= 0
(2.27)
folosind definitiile (2.24) rezulta :
ωx =dj
dt· k = 0 , ωy =
dk
dt· i = 0 , ωz =
di
dt· j = ψ (2.28)
In consecinta, ın situatia studiata, vectorul rotatie are drept suport chiar axa ın jurul careiaa avut loc rotatia. Observatia ısi pastreaza valabilitatea si ın cazul unor rotatii ın jurul unoraxe de tip Ox sau Oy , sau ın cazul unei rotatii un jurul unei axe avand o orientare oarecare,cand toate cele trei componente ale vectorului rotatie pot fi diferite de zero.
Legatura dintre derivata unui vector V raportat la sistemul fix si derivata aceluiasi vector,ınsa raportat la sistemul mobil, se obtine derivand dupa timp identitatea :
Vx1i1 + Vy1
j1 + Vz1k1 = Vx i + Vy j + Vz k (2.29)

2.3. MISCAREA RELATIVA 41
si folosind formulele lui Poisson :
Vx1i1 + Vy1
j1 + Vz1k1 = Vx i + Vy j + Vz k + Vx
di
dt+ Vy
dj
dt+ Vz
dk
dt=
= Vx i + Vy j + Vz k + ω × (Vx i + Vy j + Vz k) (2.30)
Definind derivata absoluta a vectorului V , raportat la sistemul fix :
dV
dt= Vx1
i1 + Vy1j1 + Vz1
k1 (2.31)
si derivata relativa a aceluiasi vector V , raportat la sistemul mobil, calculata ca si cumversorii i , j , k nu ar depinde de timp :
d′Vdt
= Vx i + Vy j + Vz k (2.32)
relatia (2.30) devine :dV
dt=
d′Vdt
+ ω ×V (2.33)
unde ın membrul drept, vectorul V este raportat la sistemul mobil.
Folosind (2.33), pot fi deduse expresiile vitezei si acceleratiei punctului ın miscarea rela-tiva. Conform Fig. 2.1 , se poate scrie ca :
r1 = rO + r (2.34)
Derivand aceasta relatie dupa timp, rezulta :
dr1
dt=
drO
dt+
d′rdt
+ ω × r (2.35)
Aici :
va =dr1
dt(2.36)
reprezinta viteza punctului P ın raport cu sistemul fix, adica viteza absoluta , iar
vr =d′rdt
(2.37)
reprezinta viteza aceluiasi punct P ın raport cu sistemul mobil, adica viteza relativa .Notand cu :
vt = vO + ω × r (2.38)
viteza pe care ar avea-o punctul P daca ar fi legat solidar de sistemul Oxyz , adica vitezade transport , formula de compunere a vitezelor ın miscarea relativa va fi :
va = vO + vr + ω × r = vr + vt (2.39)
Viteza absoluta se compune dintr-un termen datorat miscarii sistemului mobilsi un termen datorat miscarii punctului ın raport cu sistemul mobil.

42 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
Derivand ınca odata dupa timp relatia (2.35), se obtine :
d2r1
dt2=
d2rO
dt2+
d′ 2rdt2
+ ω × d′rdt
+dω
dt× r + ω × d′r
dt+ ω × (ω × r) =
=d2rO
dt2+
d′ 2rdt2
+ 2 ω × vr + ω × r + ω × (ω × r) (2.40)
Aici :
aa =d2r1
dt2(2.41)
reprezinta acceleratia punctului P ın raport cu sistemul fix, adica acceleratia absoluta ,iar
ar =d′ 2rdt2
(2.42)
reprezinta acceleratia aceluiasi punct P ın raport cu sistemul mobil, adica acceleratia re-lativa . Notand :
at = aO + ω × r + ω × (ω × r) (2.43)
acceleratia de transport , care se compune din acceleratia de translatie a originii O , dinacceleratia unghiulara ω × r si din acceleratia centripeta ω × (ω × r) , si respectiv
ac = 2 ω × vr (2.44)
acceleratia Coriolis , care de datoreste rotatiei sistemului mobil combinata cu miscarea luiP ın raport cu acest sistem, legea de compunere a acceleratiilor ın miscarea relativa devine :
aa = ar + at + ac (2.45)
Acceleratia absoluta se compune din acceleratia de transport datorata miscariisistemului mobil, din acceleratia punctului ın raport cu sistemul mobil si dinacceleratia Coriolis.
Folosind aceste rezultate, poate fi dedusa ecuatia miscarii relative . Deoarece ecuatialui Newton este adevarata doar daca miscarea este raportata la un sistem de referinta abso-lut : m aa = F , ınlocuind aici pe (2.45) rezulta :
m (ar + at + ac) = F (2.46)
de unde pentru miscarea relativa se obtine ecuatia :
m ar = F + Ft + Fc (2.47)
unde s-au facut notatiile :
Ft = −m at = −m [ aO + ω × r + ω × (ω × r) ]
Fc = −m ac = − 2 mω × vr
(2.48)
Se observa ca miscarea relativa a unui punct material poate fi determinata cu ajutorul uneiecuatii similare cu cea a lui Newton, ınsa pe langa forta data F , vor trebui introduse doua

2.4. SISTEME INERTIALE. GRUPUL LUI GALILEI 43
forte complementare : Ft - forta de transport si Fc - forta Coriolis , care se datorescluarii ın considerare a miscarii sistemului mobil. Fortele Ft si Fc sunt numite si forteinertiale , deoarece ele sunt proportionale cu masa inerta a punctului. Acestea sunt nisteforte reale pentru un observator legat solidar de sistemul de referinta mobil, spre deosebirede observatorul din sistemul fix pentru care aceste forte complementare nu exista.
Folosind ecuatia (2.47) poate fi scrisa usor conditia de echilibru relativ ın sistemulmobil :
F + Ft = 0 (2.49)
deoarece ın aceasta situatie vr = ar = 0 si deci Fc = 0 .
2.4 Sisteme inertiale. Grupul lui Galilei
Se observa ca daca simultan ω = 0 si aO = 0 , atunci se anuleaza fortele complementarecare actioneaza asupra punctului ın miscarea relativa. Invers, daca Ft = 0 si Fc = 0 pentruorice r , atunci obligator va trebui ca ω = 0 si aO = 0 .
Conditia ω = 0, adica cea conform careia vectorul ce caracterizeaza rotatia sistemuluimobil ın raport cu cel fix sa se anuleze, implica faptul ca versorii i , j , k au directii fixe, asaıncat ın particular ei pot fi alesi coliniari cu versorii i1 , j1 , k1 . Conditia aO = 0 implicarelatia evidenta (vO = v0
O = const) :
rO(t) = v0O t + r0
O (2.50)
adica originea O a sistemului mobil se gaseste ın miscare rectilinie uniforma, sau ın repausdaca v0
O = 0 , ın raport cu sistemul fix.Astfel, daca sistemul mobil efectueaza o miscare de translatie rectilinie uniforma ın ra-
port cu cel fix, ecuatia de miscare a punctului material are aceeasi forma generala ın ambelesisteme de referinta. Observand ca principiul inertiei se prezinta la fel ın ambele sisteme dereferinta, deoarece din formula de compunere a vitezelor rezulta ca daca va = const atuncisi vr = const , iar principiul egalitatii actiunii si reactiunii este independent de sistemul dereferinta ales, se poate afirma ca legile lui Newton si deci principiile mecanicii newto-niene se prezinta la fel ın sistemele de referinta aflate ın miscare de translatierectilinie si uniforma unele fata de altele . Aceste sisteme sunt numite si sistemeinertiale , deoarece ın particular conserva principiul inertiei. Evident, prin experiente purmecanice, nu poate fi detectat din interiorul unui astfel de sistem, faptul ca acesta se gasesteın miscare de translatie rectilinie si uniforma. Aceste observatii reunite alcatuiesc princi-piul relativitatii galileene . Ipoteza privind existenta unui sistem de referinta fix ısi pierdeimportanta, deoarece din punctul de vedere al relativitatii galileene, nu mai este necesaraluarea ın considerare a unui sistem privilegiat.
Daca sistemul mobil are o miscare de translatie rectilinie si uniforma ın raport cu cel fix,atunci :
r1 = v0O t + r0
O + x i + y j + z k
t1 = t01 + t(2.51)
unde t1 este scara timpului ın sistemul fix O1x1y1z1 , iar t este scara timpului ın sistemulmobil Oxyz . Corespondenta :
(x1, y1, z1, t1) (x, y, z, t) (2.52)

44 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
definita de relatiile (2.51) constituie un grup ın raport cu legea de compunere a vitezelor.Acest grup depinde de zece parametri : trei pentru v0
O , trei pentru r0O , trei pentru definirea
orientarii sistemului mobil si unul pentru t01 . El se numeste grupul lui Galilei si se noteazacu G10 . Observand ca nu toti parametrii sunt esentiali, grupul lui Galilei poate fi adus laforma minimala .
Presupunand ca la momentul initial originile a doua sisteme inertiale coincid (r0O = 0) ,
ca i1 ‖ i , j1 ‖ j , k1 ‖ k , ca timpul are aceeasi origine t01 = 0 si notand cu v0 viteza relativade translatie, din (2.51a) rezulta relatiile dintre coordonatele aceluiasi punct ın cele douasisteme de referinta :
x1 = v0x t + x
y1 = v0y t + y
z1 = v0z t + z
(2.53)
Ecuatiile (2.53) sunt cunoscute si sub numele de transformarea lui Galilei .Principiul relativitatii galileene poate fi reformulat si ın sensul ca legile mecanicii
newtoniene sunt invariante ın raport cu grupul (transformarea) lui Galilei .Din acest principiu rezulta o consecinta foarte importanta, daca se face observatia ca si
distantele sunt invariante ın raport cu grupul lui Galilei :
[r(1)1 − r
(2)1
]2=
[r(1) − r(2)
]2(2.54)
Aceasta ınseamna ca vor fi invariante si fortele care depind de distante. Postuland ca ecuatialui Newton F = ma este invarianta ın raport cu grupul lui Galilei, deoarece forta F siaccelaratia a sunt invariante, va trebui ca si masa sa fie invarianta. Astfel, o consecintadirecta a principiului relativitatii galileene o constituie constanta masei .
Aplicatii
1. Devierea spre Est a corpurilor ın cadere libera. Se studiaza miscarea unui punctmaterial sub influenta greutatii ın raport cu un sistem de referinta solidar legat de Pamantulconsiderat ca o sfera rigida, omogena, de raza R, care se roteste cu viteza unghiulara constantaω ın jurul axei polilor. Se presupune campul gravitational omogen si se neglijeaza rezistentaaerului.
Rezolvare : Se construieste un sistem de referinta avand originea O ıntr-un punct de pesuprafata Pamantului aflat ın emisfera nordica, axa Ox tangenta la meridianul locului si orientataspre Sud, axa Oy tangenta la paralela locului si orientata spre Est, axa Oz orientata ın lungulverticalei geocentrice. Daca nu se ia ın considerare rotatia Pamantului, acest sistem de referintalocal poate fi considerat absolut si miscarea unui punct material lasat sa cada liber din origineaO este descrisa de ecuatiile :
x = 0 , y = 0 , z = − 1
2gt2 (1)
In realitate traiectoria punctului nu este perfect verticala, constatandu-se o usoara deviere spreEst y > 0,, deviere datorata miscarii de rotatie a Pamantului si deci faptului ca sistemul localOxyz nu este inertial.
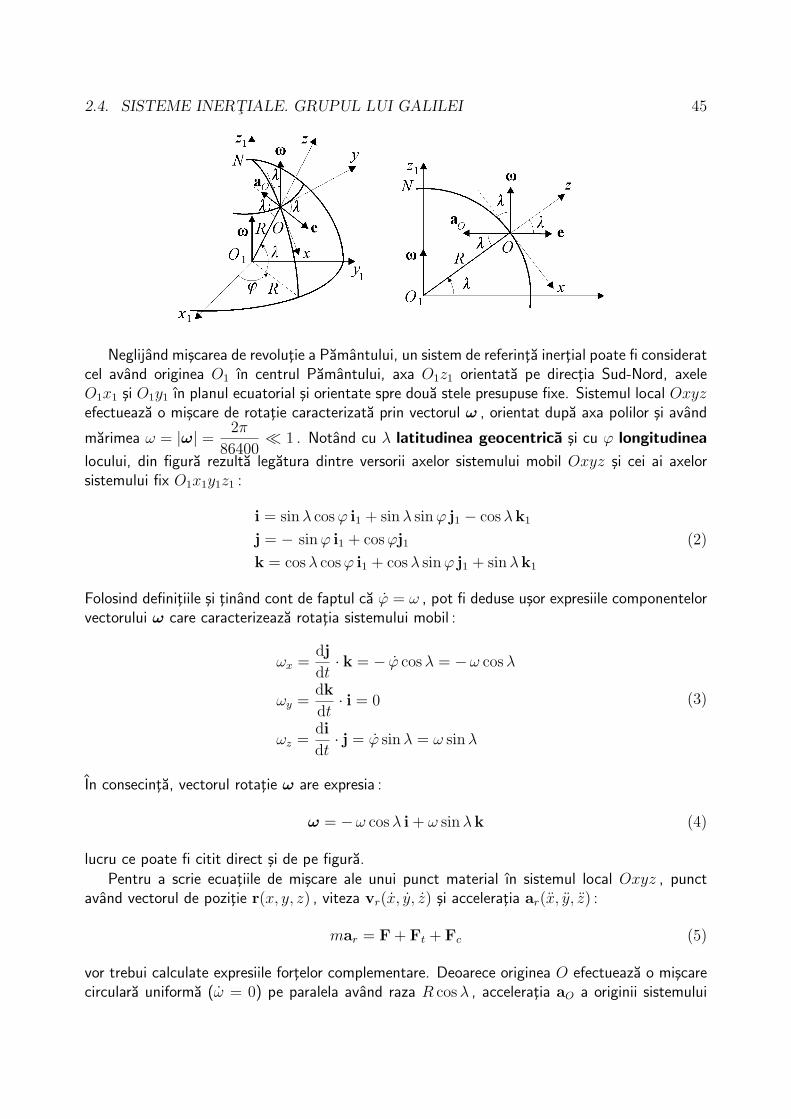
2.4. SISTEME INERTIALE. GRUPUL LUI GALILEI 45
Neglijand miscarea de revolutie a Pamantului, un sistem de referinta inertial poate fi consideratcel avand originea O1 ın centrul Pamantului, axa O1z1 orientata pe directia Sud-Nord, axeleO1x1 si O1y1 ın planul ecuatorial si orientate spre doua stele presupuse fixe. Sistemul local Oxyzefectueaza o miscare de rotatie caracterizata prin vectorul ω , orientat dupa axa polilor si avand
marimea ω = |ω| = 2π
86400¿ 1 . Notand cu λ latitudinea geocentrica si cu ϕ longitudinea
locului, din figura rezulta legatura dintre versorii axelor sistemului mobil Oxyz si cei ai axelorsistemului fix O1x1y1z1 :
i = sin λ cos ϕ i1 + sin λ sin ϕ j1 − cos λk1
j = − sin ϕ i1 + cos ϕj1
k = cos λ cos ϕ i1 + cos λ sin ϕ j1 + sin λk1
(2)
Folosind definitiile si tinand cont de faptul ca ϕ = ω , pot fi deduse usor expresiile componentelorvectorului ω care caracterizeaza rotatia sistemului mobil :
ωx =dj
dt· k = − ϕ cos λ = −ω cos λ
ωy =dk
dt· i = 0
ωz =di
dt· j = ϕ sin λ = ω sin λ
(3)
In consecinta, vectorul rotatie ω are expresia :
ω = −ω cos λ i + ω sin λk (4)
lucru ce poate fi citit direct si de pe figura.Pentru a scrie ecuatiile de miscare ale unui punct material ın sistemul local Oxyz , punct
avand vectorul de pozitie r(x, y, z) , viteza vr(x, y, z) si acceleratia ar(x, y, z) :
mar = F + Ft + Fc (5)
vor trebui calculate expresiile fortelor complementare. Deoarece originea O efectueaza o miscarecirculara uniforma (ω = 0) pe paralela avand raza R cos λ , acceleratia aO a originii sistemului

46 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
mobil va avea marimea ω2R cos λ , directia ın lungul razei si sensul spre axa O1z1 . Versorulacestei directii fiind e = sin λ i + cos λk , rezulta :
aO = −ω2R sin λ cos λ i− ω2R cos2 λk (6)
Dezvoltand produsele vectoriale, pentru fortele complementare se obtin expresiile :
Ft = −m at = −m[ aO + ω × r︸ ︷︷ ︸0
+ω × (ω × r) ] =
= mω2 sin λ [(R + z) cos λ + x sin λ] i + mω2y j+
+ mω2 cos λ [(R + z) cos λ + x sin λ]k
Fc = −m ac = − 2 mω × vr =
= 2mωy sin λ i− 2mω(x sin λ + z cos λ) j + 2mωy cos λk
(7)
Forta F care actioneaza asupra punctului este o forta atractiva de tip newtonian orientata sprecentrul Pamantului care, prespunand ca corpul nu se ındeparteaza prea mult de origine, areexpresia generala :
F = − fmM
R2k = −mg k (8)
unde g =fM
R2este acceleratia gravitationala teoretica, iar M este masa Pamantului. Reu-
nind rezultatele, ecuatiile scalare de miscare au forma :
x = 2ωy sin λ + ω2 sin λ [(R + z) cos λ + x sin λ]
y = − 2ω(x sin λ + z cos λ) + ω2y
z = − g + 2ωy cos λ + ω2 cos λ [(R + z) cos λ + x sin λ]
(9)
Deoarece integrarea exacta a acestui sistem de ecuatii diferentiale neliniare este practic impo-sibila, se va ıncerca o metoda aproximativa, solutia urmand a fi cautata sub forma unei dezvoltariın serie de puteri ın raport cu parametrul mic ω (metoda lui Poincare) :
r = r0 + ω r1 + ω2r2 + · · · (10)
Inlocuind dezvoltarea (10) ın sistemul (9) si egaland coeficientii puterilor de acelasi ordin ın ω ,rezulta succesiv urmatoarele sisteme de ecuatii :
x0 = 0
y0 = 0
z0 = − g
;
x1 = 2y0 sin λ
y1 = − 2 (x0 sin λ + z0 cos λ)
z1 = 2y0 cos λ
;
x2 = · · ·y2 = · · ·z2 = · · ·
(11)
Rezolvarea primului sistem de ecuatii conduce la obtinerea solutiei ın aproximatia de ordinul zero.In aceasta aproximatie nu este luata ın considerare rotatia Pamantului, pentru cazul caderii libereobtinandu-se chiar solutia (1). In aproximatia de ordinul ıntai solutia se obtine folosind cel de aldoilea sistem de ecuatii, ın care este ınlocuita solutia ın aproximatia de ordinul zero, s.a.m.d.

2.4. SISTEME INERTIALE. GRUPUL LUI GALILEI 47
Daca la momentul initial t0 = 0 corpul porneste din originea O cu viteza v0, primul sistemdin (11) conduce prin integrari succesive la solutia evidenta :
x0 = v0x
y0 = v0y
z0 = v0z − gt
;
x0 = v0xt
y0 = v0yt
z0 = v0zt−
1
2gt2
(12)
Inlocuind aceasta solutie ın cel de al doilea sistem din (11) si tinand cont ca ın aceasta aproximatieconditiile initiale contin valori nule, rezulta :
x1 = v0y sin λ t2
y1 = −(v0
x sin λ + v0z cos λ
)t2 +
1
3g cos λ t3
z1 = v0y cos λ t2
(13)
Neglijand termenii de ordin superior, solutia generala (aproximativa) a sistemului (9) cu conditiileinitiale mentionate, va avea forma :
x = v0xt + ωv0
y sin λ t2
y = v0yt− ω
(v0
x sin λ + v0z cos λ
)t2 +
1
3ωg cos λ t3
z = v0zt−
(1
2g − ωv0
y cos λ)
t2
(14)
Termenii care contin pe ω reprezinta ın prima aproximatie influenta rotatiei Pamantului asupracorpului lansat din O cu viteza initiala v0. Se observa ca rezultatul (14) s-ar fi obtinut si direct,daca ın sistemul (9) ar fi fost negjilati ınca de la ınceput termenii ın ω2.
In cazul particular al caderii libere (v0 = 0), solutia (14) se reduce la :
x = 0
y =1
3ωg cos λ t3
z = − 1
2gt2
(15)
Deoarece y > 0, efectul principal al rotatiei Pamantului se manifesta prin devierea spre Est atraiectoriei punctului material aflat ın cadere libera. Punctul nu va descrie verticala descendenta,ci un arc de curba ın planul yOz a carui ecuatie se obtine eliminand timpul din ultimele douaecuatii (15) :
9
8
g
ω2 cos2 λy2 + z3 = 0 (16)
Un proiectil lansat ın planul meridian : v0x 6= 0, v0
y = 0, v0z 6= 0, va fi deviat din acest plan cu
marimea :
y = −ω(v0
x sin λ + v0z cos λ
)t2 +
1
3ωg cos λ t3 (17)
Daca lansarea se face dupa tangenta la meridian (v0z = 0), ın emisfera nordica (sin λ > 0) si spre
Nord (v0x < 0), atunci y > 0 si devierea va fi spre Est. Rezultatul explica tendinta apelor din
emisfera nordica care curg spre Nord (de ex. Dunarea la Cernavoda) de a eroda malul estic.

48 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
2. Pendulul Foucault. Se cere sa se studieze influenta rotatiei Pamantului asupra miciloroscilatii ale unui pendul gravitational.
Rezolvare : Neglijand termenii mici ın ω2, ecuatia de miscare a pendului ın sistemul dereferinta local (legat solidar de Pamantul aflat ın miscare de rotatie uniforma ın jurul axei polilor)are forma generala :
mar = T + mg − 2mω × vr (1)
Prespunand ca punctul de suspensie al pendulului se gaseste ın originea O a sistemului, tensiuneaın fir este :
T = −Tr
|r| = −Tr
l(2)
unde l este lungimea firului considerat inextensibil. Ecuatiile scalare de miscare ın sistemul Oxyzvor fi astfel :
mx = −Tx
l+ 2mωy sin λ
my = −Ty
l− 2mω(x sin λ + z cos λ)
mz = −Tz
l−mg + 2mωy cos λ
(3)
Conditia de inextensibilitate a firului de suspensie :
x2 + y2 + z2 = l2 (4)
conduce prin derivare la egalitatea :
x x + y y + z z = 0 (5)
Tinant cont de aceasta relatie, din ecuatiile (3) rezulta :
m(x x + y y + z z) + mgz = 0 (6)
care prin integrare funizeaza integrala energiei :
1
2m(x2 + y2 + z2) + mgz = mgh (7)
In ipoteza micilor oscilatii si considerand firul suficient de lung, se poate considera cax
l∼ ε ,
y
l∼ ε si se pot neglija toti termenii de ordinul ε2 sau mai mici. Din (4) prin dezvoltare ın serie
rezulta :
z = − l
√1− x2 + y2
l2' − l
(1− 1
2
x2 + y2
l2
)' − l (8)
Considerand o dezvoltare similara si pentru h, rezulta ın final ca h− z ∼ ε2 si atunci :
x2 + y2 + z2 ' 0 (9)
ceea ce ınseamna ca cel putin :
x ' ε ; y ' ε ; z ' ε (10)

2.4. SISTEME INERTIALE. GRUPUL LUI GALILEI 49
Transcriind (5) sub forma :
zz
l= − x
x
l− y
y
l' ε2 (11)
va rezulta ca :z ∼ ε2 (12)
si astfel se va putea considera ın buna aproximatie ca miscarea punctului se efectueaza practic ınplanul xOy .
Pe de alta parte, derivand ınca odata pe (11) dupa timp, rezulta :
z2
l+
z
lz = − x2
l− y2
l− x
lx− y
ly (13)
Deoarece din ecuatiile (3a) si (3b) rezulta ca cel putin x ∼ ε si y ∼ ε, din (13) se obtine caz ∼ ε2. Folosind acest rezultat, din (3c) rezulta pentru z ' − l :
T = mg (14)
Cu acest rezultat, primele doua ecuatii din (3) devin :
x = − g
lx + 2ωy sin λ
y = − g
ly − 2ωx sin λ
(15)
si ele descriu miscarea punctului ın planul z = − l. Ecuatia vectoriala de miscare va fi :
ar +g
lr = − 2 ω1 × vr (16)
unde ω1 reprezinta componenta vectoriala a vectorului rotatie pe verticala locului.Daca miscarea este raportata la un sistem de axe O′x′y′ care se roteste ın planul z = − l
ın jurul verticalei O′z cu viteza unghiulara constanta −ω1 , deci ın sensul Est-Sud-Vest-Nord,atunci :
vr = v′r − ω1 × r
ar = a′r + ω1 × (ω1 × r)− 2 ω1 × v′r(17)
Introducand aceste expresii ın (16) si observand ca ω1 · r = 0 , ecuatia de miscare ın raport cusistemul O′x′y′ va fi :
a′r +(
g
l+ ω2
1
)r = 0 (18)
S-a obtinut astfel o ecuatie identica ca forma cu ecuatia oscilatorului armonic. In functie dedatele initiale, miscarea ın acest plan va fi fie unidimensionala, fie o elipsa, perioada ei fiind :
τ =2π√
g
l+ ω2
1
' 2π
√l
g(19)
La randul sau, sistemul O′x′y′ va efectua o rotatie completa ın jurul axei O′z ın timpul :
T =2π
ω1
=2π
ω sin λ(20)

50 CAPITOLUL 2. PRINCIPIILE GALILEI-NEWTON
3. Variatia acceleratiei gravitationale cu latitudinea. Luandu-se ın considerare rotatiaPamantului ın jurul axei polilor, se cere sa se studieze pozitia de echilibru ın O a unui punctmaterial greu, suspendat de A printr-un fir inextensibil de masa neglijabila (v. figura).
Rezolvare : Conditia de echilibru relativ ın sistemul local Oxyz are forma generala :
F + Ft = 0 (1)
Deoarece ω = 0 si r = 0, forta de transport Ft se gaseste ın planul meridian al locului si areexpresia :
Ft = −miaO = miω2R cos λ e (2)
unde mi reprezinta masa inerta.In absenta fortei de transport Ft, deci neluand ın considerare rotatia Pamantului, greutatea
teoretica G′ = mgg′, unde mg este masa grea, iar g′ = − fM
R2k este acceleratia gravitationala
teoretica, este echilibrata de tensiunea T din fir, ambele forte aflandu-se ın planul meridian siorientate dupa vericala teoretica O1O. In realitate, datorita existentei fortei Ft, verticala practicaOA nu coincide cu cea teoretica O1O, tensiunea T din fir fiind echilibrata de greutatea practicaG = mgg orientata dupa verticala practica, care face unghiul α cu verticala teoretica. Inconsecinta forta F din (1) va fi :
F = G′ + T = G′ −G = mg(g′ − g) (3)
conditia de echilibru a punctului greu ın O scriindu-se :
mg(g′ − g) + miω
2R cos λ e = 0 (4)
de unde rezulta expresia vectoriala pentru acceleratia gravitationala practica :
g = g′ +mi
mg
ω2R cos λ e (5)
Deoarece g′ · e = g′ cos(π + λ) = − g′ cos λ, marimea acceleratiei gravitationale practice va fi :
g2 = g′ 2 +
(mi
mg
)2
ω4R2 cos2 λ− 2g′mi
mg
ω2R cos2 λ (6)
Se observa ca doar la poli (λ = ± π
2) acceleratia gravitationala practica coincide cu cea teoretica,
orientata spre centrul Pamantului.

2.4. SISTEME INERTIALE. GRUPUL LUI GALILEI 51
Pentru a gasi valoarea unghiului α care masoara devierea verticalei practice fata de ceateoretica se porneste tot de la relatia (5), din care rezulta expresia :
g2 + g′ 2 − 2gg′ cos α =
(mi
mg
)2
ω4R2 cos2 λ (7)
adica :
cos α =
g2 + g′ 2 −(
mi
mg
)2
ω4R2 cos2 λ
2gg′=
g′ −(
mi
mg
)ω2R cos2 λ
g(8)
sau :
sin α =mi
mg
ω2R sin λ cos λ
g(9)
Se observa ca devierea este spre ecuator, are valoare maxima la latitudinea λ = 45 (α ' 6′) sise anuleaza la ecuator si la poli.
Formula (9) a permis lui Eotvos sa demonstreze experimental egalitatea numerica dintre masainerta si masa grea. Masurand la aceeasi latitudine unghiul α pentru puncte materiale de masediferite, se constata ca ın toate cazurile acesta este acelasi. In consecinta masa inerta poate diferide masa grea, indiferent de corp, cel mult printr-un factor care poate fi luat egal cu unitatea.
Capitolul 3
Dinamica punctului material
3.1 Integralele prime ale miscarii
Dupa cum s-a aratat, daca sunt ındeplinite anumite conditii, ecuatiile de miscare :
m r = F(t, r, r) (3.1)
admit o solutie unica care depinde de sase constante de integrare, care se determina impunandconditiile initiale. In o serie de situatii, problema determinarii miscarii este mult simplificatadaca sunt cunoscute una sau mai multe integrale prime ale miscarii.
Vom numi integrala prima a ecuatiilor de miscare (3.1), o functie de timp, decoordonata si viteza punctului, care ın cursul miscarii ısi pastreaza o valoare constanta,determinata de conditiile initiale :
f(t, r, r) = C unde C = f(t0, r0, r0) (3.2)
Daca este cunoscut setul complet de sase integrale prime independente avand forma (3.2) :
fα(t, r, r) = Cα ; α = 1, . . . , 6 (3.3)
problema determinarii miscarii se reduce la rezolvarea sistemului algebric (3.3), care conducela determinarea dependentei de timp a vectorului de pozitie (si a vitezei), ın functie decele sase constante care se determina din conditiile initiale. Aceasta situatie ideala esterar ıntalnita, putine fiind problemele pentru care este posibila scrierea setului complet deintegrale prime independente. Dupa cum rezulta din aplicatii, chiar daca este cunoscut unnumar mai mic de integrale prime, problema determinarii miscarii pornind de la ecuatiile(3.1) este mult simplificata.
Aceste integrale prime ale miscarii pot fi scrise destul de usor, daca asupra punctuluimaterial actioneaza forte avand o forma particulara. Cunoasterea integralelor prime, careexprima legile de conservare ale unor marimi fizice importante care caracterizeaza miscarea,devine esentiala ın problemele pentru care, chiar daca solutia exista si este unica, aceastanu poate fi dedusa prin metode analitice cunoscute. In astfel de situatii, integralele primefurnizeaza informatii cu privire la proprietatile miscarii punctului material pe traiectorie.
52

3.2. TEOREME GENERALE 53
3.2 Teoreme generale
3.2.1 Teorema impulsului
Prin definitie, impulsul unui punct material de masa m care se deplaseaza cu viteza v ,reprezinta marimea vectoriala :
p = mv = m r (3.4)
Folosind ecuatia lui Newton m r = F si axioma constantei masei, se va putea scrie :
m r = mdr
dt=
d(m r)
dt=
dp
dt= p = F =⇒ p = F (3.5)
Miscarea punctului material se face astfel ıncat, ın orice moment, derivata im-pulsului este egala cu rezultanta fortelor aplicate punctului.
In particular, daca proiectia fortei pe o axa arbitrara fixa este nula la orice moment detimp, atunci proiectia impulsului pe axa respectiva este o constanta a miscarii. Daca, deexemplu, axa fixa este Oz si Fz = 0 , atunci din (3.5) rezulta :
p · k = F · k = 0 adicad
dt(p · k) = 0 deci p · k = const (3.6)
integrala prima avand expresia :
m z = C (3.7)
Daca ın general F = 0 , rezulta urmatoarea lege de conservare : daca rezultantafortelor aplicate punctului material este nula, atunci impulsul este constant ıntot cursul miscarii . Se observa ca ın fond se reobtine principiul inertiei. Rezulta treiintegrale prime :
m x = Cx
m y = Cy
m z = Cz
(3.8)
Sa observam ca daca este nula proiectia fortei pe o axa mobila , atunci nu este obligatorca proiectia impulsului pe aceeasi axa sa fie o constanta. Intr-adevar ın cazul unei miscariplane, daca sunt folosite coordonatele polare, Fr are expresia :
Fr = m ar = m (r − rθ2) (3.9)
Este evident ca din anularea expresiei (3.9) rezulta pr = mvr = m r = const numai dacaθ = 0 , ceea ce este imposibil daca axa (r) este mobila.
3.2.2 Teorema momentului cinetic
Prin definitie, momentului cinetic al unui punct material ın raport cu o origine O estemarimea vectoriala :
L = r× p = r×m r = m (r× v) = 2 mΩ (3.10)

54 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Inmultind vectorial la stanga ecuatia F = m r cu r si observand ca :
r× F = r×m r = r×mdr
dt=
d
dt(r×m r) =
d
dt(r× p) =
dL
dt= L (3.11)
deoarece MO(F) = r× F este momentul ın O al rezultantei fortelor, se obtine egalitatea :
L = MO(F) (3.12)
Miscarea punctului material se face astfel ıncat, ın orice moment, derivata mo-mentului cinetic este egala cu momentul rezultantei fortelor aplicate, ambelemarimi fiind calculate ın raport cu aceeasi origine.
In particular, daca proiectia momentului fortei pe o axa fixa este nula la orice momentde timp, atunci proiectia momentului cinetic pe aceeasi axa este o constanta. Alegand dreptaxa fixa axa Oz , din (3.12) rezulta :
L · k = MO(F) · k = 0 adicad
dt(L · k) = 0 (3.13)
deci :
L · k = m (r× v) · k = 2 mΩ · k = const (3.14)
In coordonate carteziene, integrala prima are expresia :
m (xy − yx) = C (3.15)
In Fig. 3.1 se presupune ca suportul fortei F trece prin axa fixa Oz . Deoarece ın aceastasituatie (r × F) · k = 0 , sunt realizate conditiile cerute de cazul particular descris mai sus.
Figura 3.1: Conservarea momentului cinetic
Conform ultimei egalitati din (3.14), deplasarea punctului pe traiectorie se face astfel, ıncatproiectia sa pe orice plan perpendicular pe k se misca cu viteza areolara constanta.
Daca ın general MO(F) = 0 , atunci din (3.12) rezulta urmatoarea lege de conservare :daca momentul rezultantei ın O al fortelor aplicate punctului este nul, atunci

3.2. TEOREME GENERALE 55
momentul cinetic L ın raport cu acelasi punct O este constant ın tot cursulmiscarii . Pot fi scrise integralele prime :
m (yz − zy) = Cx
m (zx− xz) = Cy
m (xy − yx) = Cz
(3.16)
Aceasta ultima situatie se realizeaza cand asupra punctului material actioneaza forte cen-trale :
F = F (r)r
r(3.17)
Deoarece suportul unei forte de tip central trece ıntotdeauna prin origine, momentul acesteiaeste ıntotdeauna nul, momentul cinetic se conserva, si se va putea scrie egalitatea :
r× v = r0 × v0 (3.18)
Observand ca :r · (r× v) = r · (r0 × v0) = 0 (3.19)
rezulta ca sub actiunea unor forte de tip central, miscarea punctului material este ıntotdeaunaplana , vectorul de pozitie r aflandu-se tot timpul ın planul determinat de vectorii r0 si v0 .
Figura 3.2: Planul miscarii sub actiunea fortelor centrale
In acest plan, miscarea se efectueaza cu viteza areolara constanta . Daca vitezaareolara este nula, atunci r0‖v0 si miscarea este rectilinie.
3.2.3 Teorema energiei
Energia cinetica reprezinta prin definitie marimea scalara :
T =1
2mv2 =
1
2mv2 =
1
2m r2 (3.20)
Inmultind scalar cu dr ecuatia m r = F si observand ca dr = r dt, respectiv dr = r dt,rezulta :
m r dr = m r r dt = m r dr = d(
1
2m r2
)= dT (3.21)

56 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Notand lucrul mecanic elementar efectuat de rezultanta F a fortelor aplicate cu :
dL = F · dr (3.22)
se obtine ca :dT = dL (3.23)
Miscarea punctului se face astfel ıncat, ın orice moment, diferentiala totala aenergiei cinetice este egala cu lucrul mecanic elementar efectuat de rezultantafortelor aplicate.
Pentru o deplasare finita a punctului material ıntre doua stari (1) si (2) , observand caenergia cinetica (3.20) este o functie de stare, prin integrarea ecuatiei (3.23) rezulta :
T2 − T1 =
(2)∫
(1)
F · dr (3.24)
Deoarece ın general F = F(t, r, r) , pentru a calcula integrala din membrul drept, va trebuicunoscuta de obicei legea de miscare r = r(t) a punctului. Exista ınsa o clasa destul delarga de forte, pentru care poate fi calculat lucrul mecanic efectuat la o deplasare, fara a ficunoscuta forma traiectoriei. Acestea sunt fortele potentiale stationare.
O forta F = F(t, r) este potentiala , daca ea ındeplineste conditia :
rotF = 0 (3.25)
Aceasta conditie poate fi satisfacuta daca exista o functie scalara V = V (t, r) , asa ıncat :
F = − grad V (3.26)
Se spune despre functia V ca ea reprezinta potentialul din care deriva forta. In acest caz,lucrul mecanic elementar are expresia :
dL = F · dr = −∇V · dr = −(
∂V
∂xdx +
∂V
∂ydy +
∂V
∂zdz
)= − dV +
∂V
∂tdt (3.27)
Pentru o forta potentiala stationara , va trebui ca∂V
∂t= 0 si lucrul mecanic elementar
devine o diferentiala totala exacta :
F · dr = − dV (3.28)
La o deplasare finita, lucrul mecanic nu va depinde de forma traiectoriei, ci doar de valorilefunctiei V ın starea initiala si ın cea finala :
L12 =
(2)∫
(1)
F · dr = −(2)∫
(1)
dV = V1 − V2 (3.29)
Inlocuind (3.29) ın (3.24), se va putea scrie ca :
T1 + V1 = T2 + V2 (3.30)

3.2. TEOREME GENERALE 57
semnificatia fizica a functiei V fiind cea de energie potentiala a punctului material ıncampul fortelor potentiale stationare. Daca se cunoaste F(r) , din (3.28) rezulta expresiapotentialului V (r) din care deriva forta potentıala stationara corespunzatoare, sub formaunei integrale nedefinite :
V = −∫
F · dr + C (3.31)
unde C este o constanta care stabileste nivelul de zero al energiei potentiale.In cazul unei forte centrale de forma (3.17), deoarece r dr = r dr , din (3.31) se obtine :
V = −∫
F (r) dr + C (3.32)
Pentru forta de atractie newtoniana :
F = − fm1m2
r2
r
rrezulta V (r) = − f
m1m2
r; C = V (∞) = 0 (3.33)
iar pentru forta elastica :
F = − k r = − krr
rrezulta V (r) =
kr2
2; C = V (0) = 0 (3.34)
Daca forta potentiala este nestationara , pentru calculul lucrului mecanic la o deplasarefinita va trebui folosita formula generala (3.27) :
L12 =
(2)∫
(1)
F · dr = V1 − V2 +
(2)∫
(1)
∂V
∂tdt (3.35)
Deoarece acum V = V (t, r) , este evident ca rezultatul depinde de forma traiectoriei, ultimaintegrala putand fi calculata numai daca se cunoaste legea de miscare r = r(t) .
In afara fortelor potentiale, ın studiul miscarii pot fi ıntalnite si alte tipuri de forte.Dintre acestea amintim fortele giroscopice Fg , care sunt ın general liniare ın viteza siıntotdeauna perpendicualre pe v . Lucrul mecanic al fortelor giroscopice este ıntotdeaunanul. Astfel, ın cazul fortei Lorentz, se verifica direct ca :
dLg = Fg · dr = q (v ×B)v︸ ︷︷ ︸0
dt = 0 (3.36)
O alta categorie de forte nepotentiale ıl reprezinta fortele disipative Fd , care sunt orientatede obicei ın sens opus vitezei, acestea aparand atunci cand corpul se deplaseaza ıntr-un mediucare ıi opune rezistenta. Lucrul mecanic al fortelor disipative este negativ :
dLd = Fd · dr = − k v · v dt = − k v2 dt ≤ 0 (k > 0) (3.37)
Presupunand ca asupra unui corp actioneaza toate cele trei tipuri de forte :
F = −∇V + Fg + Fd (3.38)

58 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
lucrul mecanic elementar efectuat de aceste forte va fi :
dL = F dr = − dV +∂V
∂tdt + Fdv dt (3.39)
Definind energia mecanica totala E a punctului ca suma dintre energia cinetica si ceapotentiala :
E = T + V (3.40)
folosind teorema energiei (3.23) se deduce expresia variatiei energiei totale ın unitate detimp :
E =dE
dt=
dT
dt+
dV
dt=
dLdt
+dV
dt= − ∂V
∂t+ Fdv (3.41)
Se observa ca ın general energia mecanica totala a punctului material poate sa creasca, sascada, sau sa se conserve. In particular, daca asupra punctului material nu actioneazaforte disipative, iar fortele potentiale sunt stationare, atunci energia mecanicatotala se conserva :
E =1
2mv2 + V (r) =
1
2m (x2 + y2 + z2) + V (x, y, z) = h (3.42)
Rezultatul constituie o noua integrala prima a ecuatiilor de miscare, numita integrala ener-giei si ea permite determinarea valorii vitezei punctului ın functie de pozitie, fara a se rezolvaın prealabil ecuatiile de miscare.
3.2.4 Teorema virialului
Daca miscarea punctului are loc ıntr-un domeniu finit al spatiului cu o viteza finita,atunci poate fi enuntata urmatoarea teorema datorata lui Clausius :
Energia cinetica a punctului, mediata pe un interval infinit de timp, esteegala cu media pe acelasi interval de timp a virialului fortei ce actioneaza asuprapunctului. Prin definitie virialul fortei F este :
− 1
2F · r (3.43)
Inmultind scalar ecuatia de miscare F = m r cu r, rezulta :
F · r = m r · r =d
dt(m r r)−m r2 =
d
dt(m r r)− 2 T (3.44)
Deoarece media ın raport cu timpul a unei functii f(t) legata de miscarea sistemului estedefinita prin relatia :
f = lim∆t→∞
1
∆t
t0+∆t∫
t0
f(t) dt (3.45)
mediind ambii termeni ai relatiei (3.44) pe un interval infinit de timp, rezulta :
F · r = lim∆t→∞
(m r r)t0+∆t − (m r r)t0
∆t− 2 T (3.46)
3.2. TEOREME GENERALE 59
Intrucat s-a presupus ca ın cursul miscarii r si r au valori finite, primul termen din membrulal doilea al relatiei (3.46) este nul si astfel teorema este demonstrata :
T = − 1
2F · r (3.47)
Daca forta F este potentiala, atunci (3.47) devine :
T =1
2(r∇)V (3.48)
Relatia obtinuta se simplifica daca V se compune din functii omogene V = V1 +V2 + · · ·+Vn,Vi fiind o functie omogena de gradul νi ın raport cu variabilele. Daca ın plus functiile Vi nudepind explicit de timp, folosind teorema lui Euler asupra functiilor omogene, ecuatia (3.48)devine :
T =1
2
(ν1V1 + ν2V2 + · · ·+ νnVn
)(3.49)
De exemplu, pentru :
- oscilatorul armonic izotrop : V = V1 ; ν1 = 2 deci T = V
- forta de atractie universala : V = V1 ; ν1 = − 1 deci T = −1
2V
(3.50)
Aplicatii
1. Folosind coordonate polare, sa se studieze proprietatile miscarii unui punct material demasa m asupra caruia actioneaza o forta elastica F = − kr ; k > 0. (Oscilatorul armonicizotrop.)
Rezolvare : Deoarece forta elastica este de tip central, miscarea este plana. Folosind coor-donate polare, ecuatia generala de miscare mr = − kr ; k > 0 transcrisa ın forma simpla :
r + ω2r = 0 unde ω =
√k
m(1)
este echivalenta cu sistemul de ecuatii scalare :
r − rθ2 + ω2r = 0
2rθ + rθ = 0(2)
In cursul miscarii se conserva atat momentul cinetic, cat si energia mecanica totala :
r2θ = C (= 2|Ω|)1
2m(r2 + r2θ2) +
1
2mω2r2 = h
(3)
constantele C si h urmand a fi determinate din conditiile initiale1. Eliminand pe θ, rezulta oecuatie diferentiala ın functia r = r(t) :
r = ±C
√2
mC2
(h− 1
2mω2r2
)− 1
r2(4)
1Cele doua integrale prime pot fi deduse direct din sistemul de ecuatii (2). Astfel, ınmultind (2b) cu r rezulta :
2rrθ + r2θ =ddt
(r2θ) = 0 deci r2θ = C

60 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Functia θ = θ(t) va rezulta prin integrarea ecuatiei :
θ =C
r2(t)(5)
ın care urmeaza sa fie ınlocuita solutia ecuatiei (4).Pentru a obtine ecuatia diferentiala a traiectoriei r = r(θ), se trece la variabila independenta
θ observand ca :
r =dr
dt= θ
dr
dθ= C
1
r2
dr
dθ= −C
d
dθ
(1
r
)= −C
du
dθ(6)
unde u =1
r. Ecuatia (4) devine :
du
dθ= ∓
√√√√ 2
mC2
(h− mω2
2u2
)− u2 (7)
Prespunand ca conditiile initiale sunt astfel alese ıncat r ıncepe prin a descreste ıncepand de lat0, ın ecuatia (4) va figura semnul (−), iar ın ecuatia (7) corespunde semnul (+). Ultima ecuatiese mai poate rescrie sub forma :
udu√−u4 +
2h
mC2u2 − ω2
C2
= dθ (8)
sau cu schimbarea u2 = v :dv√
− v2 +2h
mC2v − ω2
C2
= 2 dθ (9)
Deoarece :∫ dx√
ax2 + bx + c= − 1√−a
arcsin2ax + b√b2 − 4ac
+ C pentru
a < 0
b2 − 4ac > 0(10)
prin integrarea ecuatiei (9) rezulta :
− arcsin− 2v +
2h
mC2
2
mC2
√h2 −m2ω2C2
= 2 (θ − θ1) (11)
Pe de alta parte, ınmultınd (2a) cu mr si (2b) cu mrθ :
mrr −mrrθ2 + mω2rr = 02mrrθ2 + mr2θθ = 0
prin ınsumare se obtine :
mrr + mrrθ2 + mr2θθ + mω2rr =ddt
[12
m(r2 + r2θ2) +12
mω2r2
]= 0
deci12
m(r2 + r2θ2) +12
mω2r2 = h

3.2. TEOREME GENERALE 61
unde ın θ1 sunt comasati toti termenii constanti care contin conditii initiale . Efectuand notatia :
K =√
h2 −m2ω2C2 (12)
ecuatia (11) se reduce la :
h−mC2v = −K sin 2 (θ − θ1) (13)
Deoarece v = u2 =1
r2, ecuatia r = r(θ) a traiectoriei punctului aflat sub actiunea unei forte
elastice, va avea forma generala :
hr2 + Kr2 sin 2 (θ − θ1)−mC2 = 0 (14)
ceea ce reprezinta ecuatia unei elipse ın coordonate polare cu centrul ın origine.Pentru a determina caracteristicile elipsei, se trece la coordonatele carteziene :
x = r cos(θ − θ1)
y = r sin(θ − θ1)(15)
ecuatia (14) transcriindu-se sub forma :
hx2 + hy2 + 2Kxy −mC2 = 0 (16)
Ecuatia redusa a elipsei se obtine din (16) efecuand o rotatie a sistemului de coordonate ın juruloriginii si determinand valoarea unghiului pentru care coeficientul termenului mixt se anuleaza.Tinand cont de formulele de transformare :
x = x′ cos α− y′ sin α
y = x′ sin α + y′ cos α(17)
ecuatia (16) devine :
(h + K sin 2α)x′ 2 + (h−K sin 2α)y′ 2 + 2K cos 2α x′y′ −mC2 = 0 (18)
de unde rezulta valoarea cautata :
cos2 α = sin2 α deci α = ± π
4(19)

62 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Facand ın (18) α = − π
4, se obtine ın final ecuatia :
x′ 2
mC2
h−K
+y′ 2
mC2
h + K
= 1 (20)
semiaxele elipsei fiind astfel :
a =
√mC2
h−K; b =
√mC2
h + K(21)
Perioada miscarii se obtine din egalitatea |Ω| = πab
T=
C
2, deci :
T =2πab
C=
2π
C
mC2
√h2 −K2
=2π
ω= 2π
√m
k(22)
3.3 Dinamica punctului supus la legaturi
Pana acum a fost studiata doar miscarea punctului material supus actiunii unor fortedate, fara sa existe nici un fel de restrictii ın ceea ce priveste pozitiile posibile pe care lepoate ocupa punctul ın spatiu. Exista ınsa situatii ın care ın cursul miscarii, indiferent defortele ce actioneaza asupra punctului, ıntre coordonatele vectorului sau de pozitie trebuiesa fie ındeplinite anumite relatii geometrice sau de alta natura. De exemplu, daca ın cursulmiscarii punctul este constrans sa ramana tot timpul pe o suprafata data, atunci coordonatelepunctului vor trebui sa satisfaca la ecuatia suprafetei :
f(t, x, y, z) = 0 (3.51)
Daca punctul este obligat sa ramana pe o curba, atunci ın cursul miscarii vor trebui sa fieındeplinite simultan ecuatiile celor doua suprafete a caror intersectie furnizeaza curba data :
f1(t, x, y, z) = 0
f2(t, x, y, z) = 0(3.52)
In ambele cazuri se spune ca punctul se misca sub actiunea fortelor ce actioneaza asuprasa, doar ın limitele admise de legaturi. Daca timpul t nu intervine explicit ın ecuatiilelegaturilor, acestea sunt numite stationare , sau scleronome . De exemplu, daca punctuleste constrans sa se miste pe o sfera fixa de raza R cu centrul ın origine, ecuatia legaturii vafi :
x2 + y2 + z2 −R2 = 0 (3.53)
Daca timpul intervine explicit ın ecuatiile legaturilor, acestea sunt numite nestationare ,sau reonome . De exemplu, pentru punctul constrans sa se miste pe o sfera de raza R , acarei centru de deplaseaza uniform cu viteza v0 ın lungul axei 0x , va trebui ca :
(x− v0t)2 + y2 + z2 −R2 = 0 (3.54)

3.3. DINAMICA PUNCTULUI SUPUS LA LEGATURI 63
Legaturile pot fi ideale , adica fara frecare, si reale , adica cu frecare. In cele ce urmeazavor fi studiate doar legaturile ideale.
Sunt situatii cand legaturile sunt exprimate prin inegalitati. Astfel, restrictia ca ın cursulmiscarii punctul sa se gaseasca tot timpul de aceeasi parte a unei suprafete date, se va scrie :
f(t, x, y, z) > 0 sau f(t, x, y, z) < 0 (3.55)
Legaturile exprimate prin egalitati poarta numele de legaturi bilaterale , iar cele exprimateprin inegalitati sunt numite legaturi unilaterale . Restrictia ca ın cursul miscarii, punctulsa se afle tot timpul ın interiorul sferei fixe de raza R cu centrul ın origine, se scrie :
x2 + y2 + z2 −R2 < 0 (3.56)
Este evident ca legea lui Newton F = ma care furnizeaza ecuatia de miscare a punctuluiliber nu este ın masura, ın forma amintita, sa descrie miscarea punctului supus la legaturi. Saobservam ınsa ca ın cazul punctului constrans sa ramana tot timpul pe o suprafata sau pe ocurba, avem de a face cu un sistem material ın interactiune , format din punctul materialsi suprafata sau curba respectiva. La tendinta punctului material de a parasi suprafata saucurba, se va opune reactiunea acesteia. Din acest motiv putem admite ca prezenta legaturiiechivaleaza cu o forta suplimentara R , asa ıncat sub actiunea fortelor date F si a fortei R ,punctul sa poata fi considerat liber (axioma de legatura). In aceste circumstante ecuatiade miscare se va putea scrie sub forma :
m a = F + R (3.57)
Forta R poarta numele de forta de legatura , sau reactiune , ea fiind o marime apriorinecunoscuta. Se stie ca ın cazul legaturilor ideale, forta R este ıntotdeauna normala lasuprafata sau curba. In cazul unei suprafete, avem ca :
R = λ
(∂f
∂xi +
∂f
∂yj +
∂f
∂zk
)= λ grad f (3.58)
iar ın cazul unei curbe, reactiunea R se gaseste ın planul determinat de cele doua normale lasuprafetele a caror intersectie determina curba, ın punctul curent de pe curba (v. Fig. 3.3) :
R = λ1 grad f1 + λ2 grad f2 (3.59)
Admitand ca legaturile sunt ideale, proiectand ecuatia (3.57) pe tangenta ıntr-un punct altraiectoriei, se obtine o ecuatie independenta de reactiune, ecuatie suficienta pentru determi-narea ecuatiei orare a miscarii s = s(t) , deoarece se stie ca pozitia punctului pe curba poate fiprecizata si cu ajutorul unui singur parametru, care este lungimea arcului masurat de la origi-nea de masurare a arcelor pe traiectorie. Odata determinata aceasta functie, prin proiectareaecuatiei (3.57) pe normala la traiectorie, va putea fi determinata reactiunea. Intr-adevar, de-oarece ın planul osculator construit ıntr-un punct oarecare al traiectoriei r = r(s) ; s = s(t) ,acceleratia are expresia :
a = s τ +v2
ρν = s τ +
s2
ρν (3.60)

64 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Figura 3.3: Reactia legaturii pentru punctul constrans se se miste pe o curba
proiectiile ecuatiei (3.57) pe tangenta, respectiv normala la traiectorie, conduc la ecuatiile :
m s = F · τ
ms2
ρ= F · ν + R · ν
(3.61)
Solutia primei ecuatii este functia s = s(t) , care ınlocuita ın cea de a doua ecuatie permitedeterminarea reactiei legaturii :
R(t) = ms2
ρν − (F · ν) ν (3.62)
Procedeul descris este avantajos doar pentru studiul miscarii punctului constrans sa se mistepe curbe sau suprafete relativ simple, ca de exemplu cercul sau sfera.
Teorema impulsului si teorema momentului cinetic pentru punctul supus lalegaturi nu prezinta un interes deosebit, aparand ın plus doar termenii corespunzatori luariiın considerare a reactiunii legaturii :
p = F + R
L = MO(F) + MO(R)(3.63)
Un rezultat interesant se obtine din teorema energiei :
dT = dL = F dr + R dr (3.64)
daca punctul este constrans sa se miste fara frecare pe o suprafata f = 0. In aceasta situatie :
R dr = λ
(∂f
∂xdx +
∂f
∂ydy +
∂f
∂zdz
)= λ
(df − ∂f
∂tdt
)= −λ
∂f
∂tdt (3.65)
deoarece df = 0 . Daca ın plus legatura ideala este si scleronoma :∂f
∂t= 0 , atunci lu-
crul mecanic al reactiei legaturii este nul, teorema energiei avand enuntul si consecinteleidentice cu cele din cazul miscarii punctului material liber. Astfel, daca asupra punctuluinu actioneaza forte disipative, fortele potentiale sunt stationare, iar legatura este ideala siscleronoma, energia mecanica totala este o integrala prima, care nu depinde de reactia Ra legaturii. Bineınteles ca atunci cand se calculeaza energia totala, va trebui tinut cont defaptul ca punctul este obligat sa se deplaseza pe o suprafata sau pe o curba.
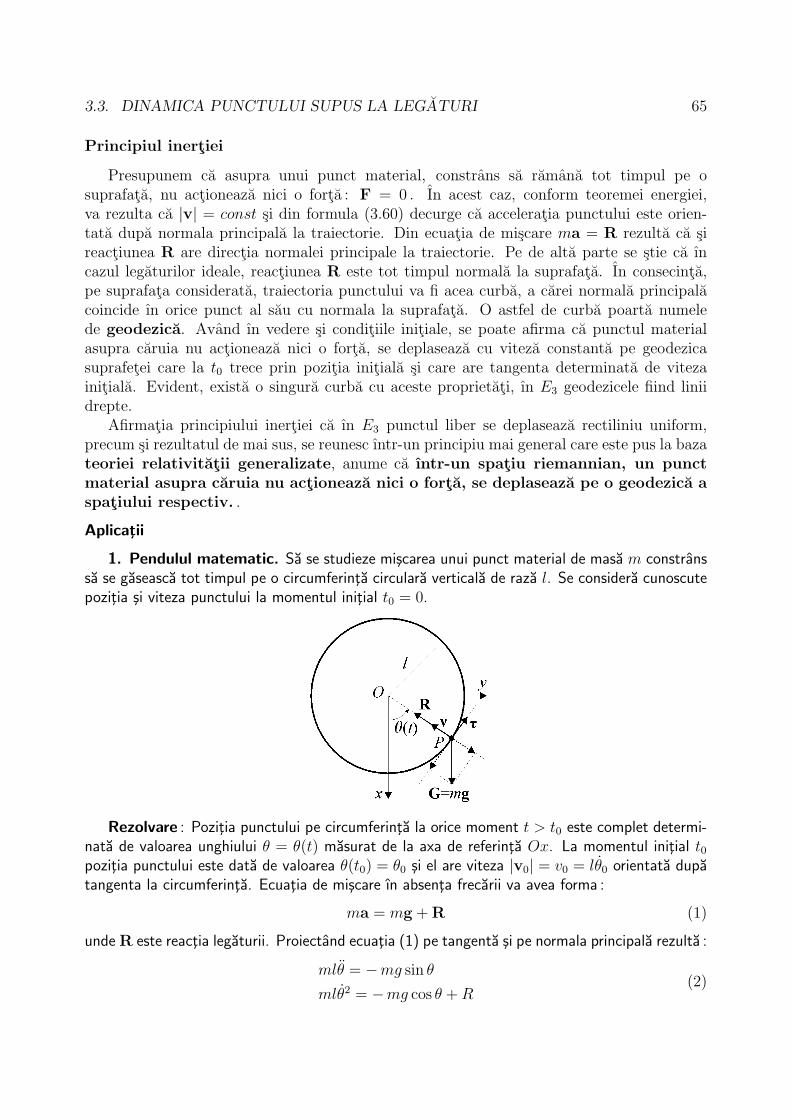
3.3. DINAMICA PUNCTULUI SUPUS LA LEGATURI 65
Principiul inertiei
Presupunem ca asupra unui punct material, constrans sa ramana tot timpul pe osuprafata, nu actioneaza nici o forta : F = 0 . In acest caz, conform teoremei energiei,va rezulta ca |v| = const si din formula (3.60) decurge ca acceleratia punctului este orien-tata dupa normala principala la traiectorie. Din ecuatia de miscare ma = R rezulta ca sireactiunea R are directia normalei principale la traiectorie. Pe de alta parte se stie ca ıncazul legaturilor ideale, reactiunea R este tot timpul normala la suprafata. In consecinta,pe suprafata considerata, traiectoria punctului va fi acea curba, a carei normala principalacoincide ın orice punct al sau cu normala la suprafata. O astfel de curba poarta numelede geodezica. Avand ın vedere si conditiile initiale, se poate afirma ca punctul materialasupra caruia nu actioneaza nici o forta, se deplaseaza cu viteza constanta pe geodezicasuprafetei care la t0 trece prin pozitia initiala si care are tangenta determinata de vitezainitiala. Evident, exista o singura curba cu aceste proprietati, ın E3 geodezicele fiind liniidrepte.
Afirmatia principiului inertiei ca ın E3 punctul liber se deplaseaza rectiliniu uniform,precum si rezultatul de mai sus, se reunesc ıntr-un principiu mai general care este pus la bazateoriei relativitatii generalizate, anume ca ıntr-un spatiu riemannian, un punctmaterial asupra caruia nu actioneaza nici o forta, se deplaseaza pe o geodezica aspatiului respectiv. .
Aplicatii
1. Pendulul matematic. Sa se studieze miscarea unui punct material de masa m constranssa se gaseasca tot timpul pe o circumferinta circulara verticala de raza l. Se considera cunoscutepozitia si viteza punctului la momentul initial t0 = 0.
Rezolvare : Pozitia punctului pe circumferinta la orice moment t > t0 este complet determi-nata de valoarea unghiului θ = θ(t) masurat de la axa de referinta Ox. La momentul initial t0pozitia punctului este data de valoarea θ(t0) = θ0 si el are viteza |v0| = v0 = lθ0 orientata dupatangenta la circumferinta. Ecuatia de miscare ın absenta frecarii va avea forma :
ma = mg + R (1)
unde R este reactia legaturii. Proiectand ecuatia (1) pe tangenta si pe normala principala rezulta :
mlθ = −mg sin θ
mlθ2 = −mg cos θ + R(2)

66 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Prima ecuatie, scrisa sub forma :
θ + ω2 sin θ = 0 unde ω2 =g
l(3)
este cunoscuta sub numele de ecuatia pendulului si ea permite determinarea miscarii θ = θ(t).Odata cunoscuta solutia ecuatiei (3), din (2b) va rezulta dependenta de timp a reactiei legaturii :
R(t) = mlθ2 + mg cos θ (4)
Legatura fiind stationara, iar forta care actioneaza asupra punctului potentiala, se va puteascrie ca V = mgl −mgx = mgl(1− cos θ), integrala energiei avand astfel expresia2 :
1
2ml2θ2 + mgl(1− cos θ) = h (5)
Folosind conditiile initiale, ecuatia (5) se transcrie dupa cum urmeaza :
θ2 = θ20 + 4ω2
(sin2 θ0
2− sin2 θ
2
)= 4ω2
(k2 − sin2 θ
2
)(6)
unde s-a facut notatia :
k2 =θ20
4ω2+ sin2 θ0
2=
lθ20
4g+ sin2 θ0
2(7)
Se observa ca valoarea constantei k2 este determinata ın ıntregime de datele problemei si deconditiile initiale.
Deoarece θ2 ≥ 0, analiza membrului drept al ecuatiei (6) permite punerea ın evidenta aurmatoarelor situatii posibile, ın functie de valorile permise pentru k2 :
a. k2 < 1 : miscarea este oscilatorie, elongatia unghiulara maxima avand valoarea :
α = ± 2 arcsin k (8)
Facand schimbarea de functie :
sinθ
2= k sin ϕ (9)
ecuatia (6) devine :
ϕ = ±ω√
1− k2 sin2 ϕ (10)
2 Legea de conservare poate fi dedusa direct, ınmultınd (3) cu ml2θ :
ml2θθ + mglθ sin θ =ddt
(12
ml2θ2 −mgl cos θ
)= 0
deci :12
ml2θ2 −mgl cos θ = h−mgl adica12
ml2θ2 + mgl(1− cos θ) = h
unde mgl este valoarea constantei care stabileste nivelul de zero al energiei potentiale.

3.3. DINAMICA PUNCTULUI SUPUS LA LEGATURI 67
Din definitia (9) rezulta ca variatia functiei ϕ este monotona, semnul din (10) fiind determinatde conditiile initiale. Alegand semnul (+), prin integrare rezulta :
ϕ(t)∫
ϕ0
dϕ√1− k2 sin2 ϕ
= ω(t− t0) (11)
ceea ce arata ca solutia se exprima prin functii eliptice de speta I-a.Perioada miscarii oscilatorii va fi data de expresia :
T =1
ω
2π∫
0
dϕ√1− k2 sin2 ϕ
=4
ω
π2∫
0
dϕ√1− k2 sin2 ϕ
(12)
Integrala poate fi calculata observand ca pentru k < 1 expresia de sub integrala poate fi dezvoltataın serie :
1√1− k2 sin2 ϕ
= 1 +∞∑
n=1
1 · 3 · 5 · · · (2n− 1)
2 · 4 · 6 · · · 2n k2n sin2n ϕ
π2∫
0
sin2n ϕ dϕ =1 · 3 · 5 · · · (2n− 1)
2 · 4 · 6 · · · 2n · π
2
(13)
asa ıncat expresia (12) devine :
T =2π
ω
1 +
∞∑
n=1
[1 · 3 · 5 · · · (2n− 1)
2 · 4 · 6 · · · 2n
]2
k2n
(14)
In cazul micilor oscilatii k ¿ 1 si perioada T ' T0 =2π
ω= 2π
√l
gnu depinde de amplitudinea
oscilatiilor, adica ın prima aproximatie oscilatiile pendulului sunt tautocrone.
b. k2 = 1 : miscarea este neperiodica. Cu schimbarea de functie ϕ =θ
2, ecuatia (6) devine :
ϕ = ±ω cos ϕ (15)
semnul fiind determinat de conditiile initiale. Alegand semnul (+) si tinand cont de formula∫ dϕ
cos ϕ= ln tg
(ϕ
2+
π
4
)+ C , integrala ecuatiei (15) va fi :
tg(
ϕ
2+
π
4
)=
[tg
(ϕ0
2+
π
4
)]e ω(t− t0) (16)
Revenind la functia θ(t), se va obtine ın final :
θ(t) = − π + 4 arctg[
tg(
ϕ0
2+
π
4
)]e ω(t− t0)
(17)
Se observa ca :limt→∞ θ(t) = − π + 2π = π (18)

68 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
ceea ce era de asteptat, deoarece corpul nu poate depasi punctul de altitudine maxima de pecircumferinta.
c. k2 > 1 : miscarea este rotatorie, sensul miscarii fiind determinat de conditiile initiale.Problema determinarii miscarii se reduce la cazul a. transcriind (6) ın forma :
θ2 = 4ω2k2
(1− 1
k2sin2 θ
2
)(19)
si facand schimbarea de functie ϕ =θ
2. Rezulta ecuatia :
ϕ = ±ωk
√1− 1
k2sin2 ϕ (20)
ceea ce indica faptul ca si ın acest caz solutia se exprima prin functii eliptice de speta I-a. Formulaperioadei ın cazul miscarii rotatorii va fi :
T =1
ωk
π∫
0
dϕ√1− 1
k2sin2 ϕ
=2
ωk
π2∫
0
dϕ√1− 1
k2sin2 ϕ
=
=π
ωk
1 +
∞∑
n=1
[1 · 3 · 5 · · · (2n− 1)
2 · 4 · 6 · · · 2n
]2
k−2n
(21)
Este interesant cazul particular k2 À 1 cand T ' 2π
θ0
=2πl
v0
, obtinandu-se valoarea perioadei ın
miscarea circulara uniforma.In toate cazurile, dependenta reactiei legaturii R de timp si deci de θ este :
R(t) = 4mg
(k2 − sin2 θ
2
)+ mg
(1− 2 sin2 θ
2
)= mg
(4k2 + 1− 6 sin2 θ
2
)(22)
Se observa ca pot exista valori ale unghiului θ pentru care ın cursul miscarii reactiunea treceprintr-un zero si ısi poate schimba semnul :
β = ± arcsin
√4k2 + 1
6(23)
Daca ın cursul miscarii unghiul θ trece prin una din valorile date de ecuatia (23), punctul ar puteaparasi circumferinta circulara daca legatura nu ar fi bilaterala. Pot fi distinse mai multe situatii :
a) k2 <1
2: miscarea este oscilatorie, ınsa deoarece |α| ≤ |β| reactiunea nu ısi poate schimba
semnul ın cursul miscarii, ea atingand valoarea minima zero doar la limita k2 =1
2, deci pentru
α = ± π
2;
b)1
2< k2 < 1 : miscarea este tot oscilatorie, ınsa deoarece acum |α| > |β| > π
2, vor exista
ıntotdeauna doua domenii + |β| < θ(t) < + |α| si − |α| < θ(t) < − |β| pentru care R < 0 ;

3.3. DINAMICA PUNCTULUI SUPUS LA LEGATURI 69
c) k2 = 1 : miscarea este neperiodica si ın domeniul |β| < |θ(t)| ≤ π reactiunea este negativa ;
d) 1 < k2 <5
4: miscarea este rotatorie, dar va exista ıntotdeauna un domeniu |β| < |θ(t)| <
2π − |β| pentru care R < 0 ;
e) k2 ≥ 5
4: reactiunea nu-si va schimba semnul indiferent de valoarea lui θ(t) , ea anulandu-se
doar la limita k2 =5
4pentru care β = ± π.
Daca asupra punctului material actioneaza si o forta de rezistenta care se opune miscarii sicare este proportionala cu marimea vitezei, ecuatia de miscare a punctului se scrie sub forma :
mlθ = −mg sin θ − k · lθ (24)
Folosind notatia obisnuita µ =k
m, ecuatia devine :
θ = − g
lsin θ − µ θ (25)
Va exista ıntotdeauna o valoare a timpului t′ , asa ıncat pentru orice t > t′ sa poata fi facutaaproximatia sin θ ≈ θ (mici oscilatii) . Ecuatia (25) devine :
θ + µ θ +g
lθ = 0 ; t > t′ (26)
Cautand o solutie sub forma eλt , rezulta :
λ1,2 = − µ
2±
√(µ
2
)2
− g
l(27)
Pentruµ
2>
√g
l, solutia generala a ecuatiei (26) este :
θ(t) = e− µ
2t
C1 exp
√(µ
2
)2
− g
l· t
+ C2 exp
−
√(µ
2
)2
− g
l· t
; t > t′ (28)
Miscarea nu este periodica si limt→∞ θ(t) = 0 . Daca ınsa
µ
2<
√g
l, solutia generala a ecuatiei (26)
se scrie :
θ(t) = α ′ e− µ
2tcos
√g
l−
(µ
2
)2
· t + β′ ; t > t′ (29)
Functia (29) descrie o miscare oscilatorie amortizata cu perioada :
T ′0 =
2π√g
l−
(µ
2
)2(30)
2. Sa se determine viteza v0 cu care un punct material este lansat de la baza unei circumferintecirculare verticale de raza l, asa ıncat dupa ce acesta paraseste circumferinta, traiectoria sa satreaca prin centrul circumferintei. Se neglijeaza frecarea.

70 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
Rezolvare : Deoarece legatura nu este bilaterala, punctul material paraseste circumferintaın momentul ın care reactiunea R se anuleaza. Conform rezultatelor din problema anterioara,valoarea unghiului pentru care R = 0 este data de expresia :
sin2 θ1
2=
4k2 + 1
6unde k2 =
lθ20
4g=
v20
4gl>
1
2(1)
Viteza unghiulara avuta de punctul material ın momentul parasirii circumferintei va fi :
θ21 = 4ω2
(k2 − sin2 θ1
2
)= ω2 2(2k2 − 1)
3; ω2 =
g
l(2)
Pe portiunea P1O ecuatiile parametrice ale traiectoriei vor fi :
x(t) = x1 + x1t +1
2gt2
y(t) = y1 + y1t(3)
unde conditiile initiale sunt date de expresiile :
x1 = l cos θ1 ; x1 = − lθ1 sin θ1
y1 = l sin θ1 ; y1 = lθ1 cos θ1(4)
Eliminand timpul din ecuatiile (3) va rezulta ecuatia traiectoriei ın planul xOy :
x = x1 +x1
y1
(y − y1) +g
2y21
(y − y1)2 (5)
Facand aici x = y = 0 si ınlocuind conditiile initiale (4), rezulta ecuatia :
sin2 θ1 +2θ2
1
ω2cos θ1 = 0 (6)
care, tinand cont de (2), devine :
3 sin2 θ1 + 4(2k2 − 1) cos θ1 = 0 (7)

3.3. DINAMICA PUNCTULUI SUPUS LA LEGATURI 71
Observand ca :
cos θ1 = 1− 2 sin2 θ1
2=
2
3(1− 2k2) ; sin2 θ1 = 4 sin2 θ1
2cos2 θ1
2= 4
4k2 + 1
6
5− 4k2
6(8)
din (7) rezulta ecuatia pentru determinarea valorii lui k2 :
16 k4 − 16 k2 + 1 = 0 (9)
Deoarece k2 >1
2, unica solutie posibila este :
k2 =2 +
√3
4(10)
adicav2
0 = (2 +√
3)gl (11)
3. Pendulul cicloidal (Huygens). Un punct material se misca fara frecare sub influentagreutatii pe o cicloida situata ın plan vertical. Sa se studieze proprietatile miscarii daca la mo-mentul initial t0 = 0 punctul porneste din repaus.
Rezolvare : Alegand sistemul de axe ca ın figura, ecuatiile parametrice ale cicloidei sunt :
x = a(1 + cos θ)
y = a(θ + sin θ); − π ≤ θ ≤ π (1)
Deoarece miscarea punctului pe cicloida se face fara frecare sub actiunea fortei de greutate,energia mecanica totala se conserva :
1
2m(x2 + y2) + mg(2a− x) = h (2)
Din ecuatiile (1) prin derivare dupa timp rezulta :
x = − aθ sin θ
y = aθ(1 + cos θ)(3)
Integrala energiei va capata astfel forma :
ma2θ2(1 + cos θ) + mga(1− cos θ) = h (4)
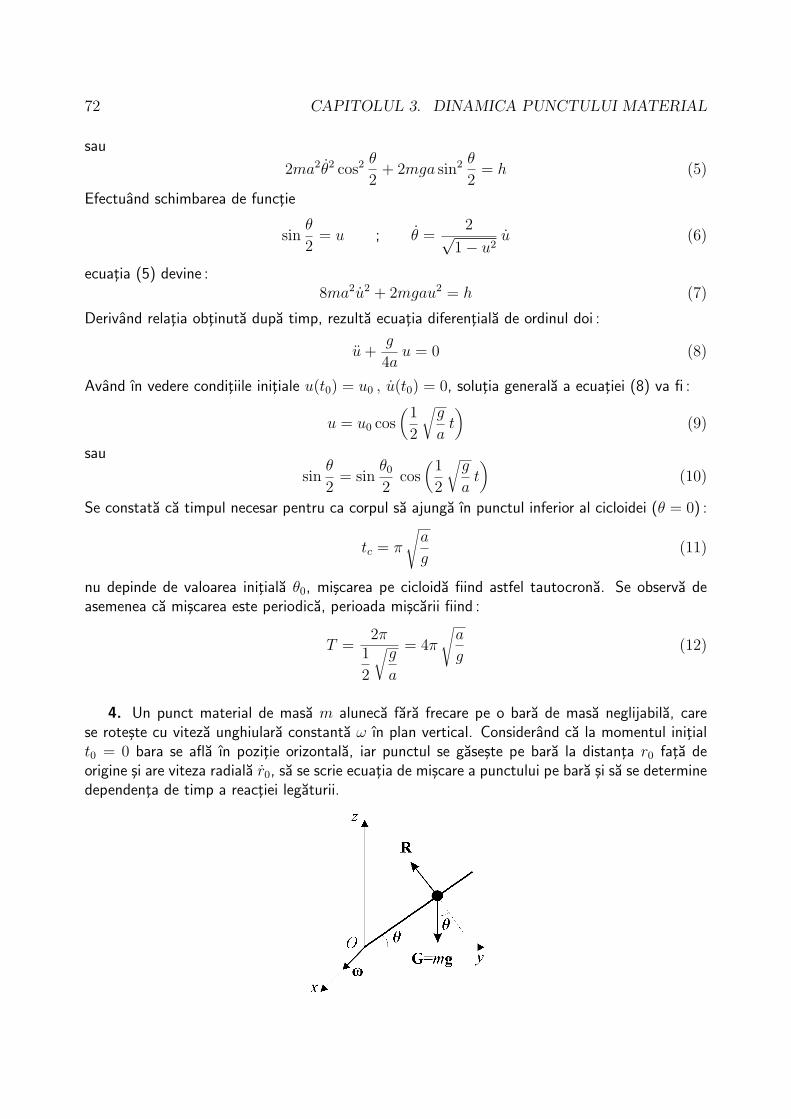
72 CAPITOLUL 3. DINAMICA PUNCTULUI MATERIAL
sau
2ma2θ2 cos2 θ
2+ 2mga sin2 θ
2= h (5)
Efectuand schimbarea de functie
sinθ
2= u ; θ =
2√1− u2
u (6)
ecuatia (5) devine :8ma2u2 + 2mgau2 = h (7)
Derivand relatia obtinuta dupa timp, rezulta ecuatia diferentiala de ordinul doi :
u +g
4au = 0 (8)
Avand ın vedere conditiile initiale u(t0) = u0 , u(t0) = 0, solutia generala a ecuatiei (8) va fi :
u = u0 cos(
1
2
√g
at)
(9)
sau
sinθ
2= sin
θ0
2cos
(1
2
√g
at)
(10)
Se constata ca timpul necesar pentru ca corpul sa ajunga ın punctul inferior al cicloidei (θ = 0) :
tc = π
√a
g(11)
nu depinde de valoarea initiala θ0, miscarea pe cicloida fiind astfel tautocrona. Se observa deasemenea ca miscarea este periodica, perioada miscarii fiind :
T =2π
1
2
√g
a
= 4π
√a
g(12)
4. Un punct material de masa m aluneca fara frecare pe o bara de masa neglijabila, carese roteste cu viteza unghiulara constanta ω ın plan vertical. Considerand ca la momentul initialt0 = 0 bara se afla ın pozitie orizontala, iar punctul se gaseste pe bara la distanta r0 fata deorigine si are viteza radiala r0, sa se scrie ecuatia de miscare a punctului pe bara si sa se determinedependenta de timp a reactiei legaturii.

3.3. DINAMICA PUNCTULUI SUPUS LA LEGATURI 73
Rezolvare : Folosind coordonatele polare ın planul yOz, ecuatia de miscare a punctului demasa m :
mr = mg + R (1)
va fi echivalenta cu sistemul de ecuatii scalare :
m(r − rθ2) = −mg sin θ
m(2rθ + rθ) = −mg cos θ + R(2)
Conform datelor initiale :θ = ω ; θ(t) = ωt (3)
si sistemul (2) devine :r − ω2r = − g sin ωt
R = mg cos ωt + 2mωr(4)
Ecuatia (4a) are solutia generala :
r(t) = C1eωt + C2 e−ωt +
g
2ω2sin ωt (5)
Impunand conditiile initiale, rezulta sistemul de ecuatii :
C1 + C2 = r0
ω(C1 − C2 +
g
2ω2
)= r0
(6)
care are solutia :
C1 =1
2
(r0 +
r0
ω− g
2ω2
)
C2 =1
2
(r0 − r0
ω+
g
2ω2
) (7)
Solutia ecuatiei radiale va fi :
r(t) =1
2
(r0 +
r0
ω− g
2ω2
)eωt +
1
2
(r0 − r0
ω+
g
2ω2
)e−ωt +
g
2ω2sin ωt (8)
Derivand solutia (8) si ınlocuind ın ecuatia (4b) rezulta :
R(t) = 2mg cos ωt + mω2[(
r0 +r0
ω− g
2ω2
)eωt −
(r0 − r0
ω+
g
2ω2
)e−ωt
](9)
Capitolul 4
Dinamica sistemelor de punctemateriale
Se studiaza miscarea unui ansamblu finit de N puncte materiale Pi(mi, ri) ; i = 1, . . . , Naflate ın interactiune. Pozitia sistemului la un moment dat este data de ansamblul vectorilorde pozitie ri = ri(xi, yi, zi) ; i = 1, . . . , N . Sistemul are 3N grade de libertate, iar miscareasistemului este determinata de cunoasterea functiilor ri = ri(t) ; i = 1, . . . , N , ca solutii alesistemului de N ecuatii de miscare scrise pentru fiecare punct i care alcatuieste ansamblul :
miri = Fi +N∑
j=1j 6=i
Fij ; i = 1, . . . , N (4.1)
Aici Fi reprezinta rezultanta fortelor exterioare aplicate ın Pi , iar Fij reprezinta actiunile
punctelor Pj ; j = 1, . . . , N ; j 6= i care se exercita asupra punctului Pi . In generalinteractiunile Fij , numite si forte interioare , nu sunt cunoscute apriori si nici nu pot fideterminate fara a face ipoteze suplimentare privind structura si modul de deformare al sis-temului. Miscarea sistemului nu poate fi determinata complet fara a cunoaste interactiunilesi de obicei nici interactiunile nu pot fi determinate daca nu se cunoaste miscarea.
Problema generala a dinamicii sistemelor de puncte materiale consta ın adetermina miscarea si interactiunile. Deoarece problema pusa astfel este mult maicomplexa decat cea privind studiul miscarii punctului material, liber sau supus la legaturi,ın cele ce urmeaza ne vom limita doar la a indica modul ın care pornind de la ecuatiile(4.1) pot fi obtinute cateva teoreme generale , care caracterizeaza miscarea de ansamblua sistemului si care ne pot furniza unele integrale prime . O integrala prima a sistemuluide ecuatii de miscare (4.1) este o functie de timp, de coordonatele si vitezele punctelor carealcatuiesc sistemul, care pastreaza o valoare constanta ın cursul evolutiei sistemului :
f(t, r1, . . . , rN , r1, . . . , rN) = C unde C = f(t0, r01, . . . , r
0N , r0
1, . . . , r0N) (4.2)
Deoarece acum setul complet de integrale prime independente este 6N , devine practic impo-sibil ca prin rezolvarea unui sistem algebric sa poata fi determinata miscarea pornind numaide la integrale prime (cu exceptia cazului N = 2), aceasta pentru ca ın mecanica newtoniananu exista o metoda coerenta de construire a setului complet de integrale prime independente,pornind de la cateva cunoscute.
74

4.1. TEOREME GENERALE 75
4.1 Teoreme generale
4.1.1 Teorema impulsului si teorema miscarii centrului de masa
Prin definitie, impulsul total al sistemului de puncte materiale este vectorul :
p =N∑
i=1
mivi =N∑
i=1
miri (4.3)
Sumand ecuatiile (4.1) pe toate punctele sistemului, rezulta :
N∑
i=1
miri =N∑
i=1
midri
dt=
d
dt
(N∑
i=1
miri
)=
dp
dt= p (4.4)
respectiv :N∑
i=1
Fi = F (4.5)
unde F reprezinta rezultanta tuturor fortelor exterioare aplicate asupra sistemului de puncte,iar :
N∑
i,j=1j 6=i
Fij =N∑
i<j
(Fij + Fji)︸ ︷︷ ︸0
= 0 (4.6)
rezultanta fortelor interioare fiind zero datorita principiului egalitatii actiunii cu reactiunea.Reunind rezultatele, se obtine ecuatia :
p = F (4.7)
care exprima teorema impulsului, anume faptul ca miscarea sistemului se face astfelıncat ın orice moment derivata impulsului total ın raport cu timpul este egalacu rezultanta fortelor exterioare.
Daca rezultanta fortelor exterioare care actioneaza asupra sistemului este nula (F = 0) ,atunci impulsul total al sistemului se conserva :
N∑
i=1
miri = p0 unde p0 =N∑
i=1
mir0i =
N∑
i=1
miv0i (4.8)
rezultand astfel trei integrale prime scalare. Conditia F = 0 se realizeaza ın cazul unui sistemınchis sau izolat , interactiunea acestuia cu corpurile ınconjuratoare fiind neglijabila.
Pornind de la definitia pentru vectorul de pozitie al centrului de masa :
rc =1
M
N∑
i=1
miri ; M =N∑
i=1
mi (4.9)
prin derivare de doua ori dupa timp, folosind (4.4) rezulta :
M rc =N∑
i=1
miri = p (4.10)

76 CAPITOLUL 4. DINAMICA SISTEMELOR DE PUNCTE MATERIALE
si ın conformitate cu ecuatia (4.7) se poate scrie :
M rc = F (4.11)
ceea ce reprezinta teorema miscarii centrului de masa care exprima faptul ca centrulde masa al unui sistem de puncte materiale se misca la fel ca un punct materialın care ar fi concentrata ıntreaga masa a sistemului si ın care ar fi aplicatarezultanta fortelor exterioare. Se observa ca fortele interioare nu au nici o influentaasupra miscarii centrului de masa. Astfel, ın cazul unui proiectil care explodeaza, neglijandrezistenta aerului, centrul de masa al fragmentelor sale are aceeasi miscare, pe care ar avea-oproiectilul daca nu ar exploda.
In cazul unui sistem ınchis, centrul de masa are o miscare rectilinie si uniforma, sauramane ın repaus, chiar daca elementele sistemului pot avea miscari diferite sub influentafortelor interioare. Din acest motiv un om nu poate ınainta pe o gheata perfect lucie,greutatea omului fiind anulata de reactiunea ghetii, rezultanta fortelor fiind astfel nula.
In baza teoremei miscarii centrului de masa, apare posibilitatea asimilarii miscarii unuicorp de dimensiuni finite, cu miscarea unui singur punct, care este chiar centrul de masa alcorpului respectiv.
Aplicatii
1. O racheta avand masa M este lansata vertical de pe suprafata Pamantului, avand lamomentul initial o cantitale µ0 de combustibil. Presupunand constanta viteza relativa u deexpulzare a gazelor, sa se determine viteza finala a rachetei la epuizarea combustibilului, dacamasa acestuia variaza dupa legea liniara µ(t) = µ0−αt , α > 0. Se neglijeaza rezistenta aerului,precum si variatia lui g cu altitudinea.
Rezolvare : Ecuatia generala a lui Mescerski1, proiectata pe verticala, va avea ın conditiileenuntate forma concreta :
[M + µ(t)]dv
dt= − [M + µ(t)] g − dµ
dtu (1)
adica :dv
dt= − g − u
M + µ(t)
dµ
dt(2)
1Se considera un corp care are masa m si viteza v la momentul t, deci impulsul mv . In intervalul ∆t esteexpulzata o particula de masa −∆m (∆m < 0) cu viteza relativa u . Impulsul total al sistemului la momentult + ∆t este :
(m + ∆m)v(t + ∆t) + (−∆m)(v + u)
Conform teoremei impulsului, variatia impulsului ın intervalul de timp ∆t va fi :
(m + ∆m)(v + ∆v)−∆m(v + u)−mv = F∆t
unde F reprezinta rezultanta fortelor exterioare aplicate. Impartind cu ∆t, trecand la limita ∆t → 0 si neglijandtermenul infinit mic de ordinul doi, rezulta ecuatia lui Mescerski :
mdvdt
= F +dm
dtu

4.1. TEOREME GENERALE 77
Integrand si tinand cont ca la momentul initial viteza este nula, rezulta :
v(t) = − gt− u
µ(t)∫
µ0
dµ
M + µ(t)= − gt + u ln
M + µ0
M + µ(t)(3)
Viteza finala, corespunzatoare momentului cand s-a consumat ıntreaga cantitate de combustibil,va fi data de formula :
vf = − gtf + u ln(1 +
µ0
M
)(4)
Rezultatul este cunoscut sub numele de formula lui Tiolkovski. In conditiile ın care masa variazaliniar cu viteza :
tf =µ0
α(5)
4.1.2 Teorema momentului cinetic
Momentul cinetic total ın raport cu O al unui sistem de puncte materiale are expresia :
L =N∑
i=1
Li =N∑
i=1
(ri × pi) =N∑
i=1
(ri ×miri) =N∑
i=1
mi(ri × vi) = 2N∑
i=1
miΩi (4.12)
Inmultind vectorial la stanga fiecare din ecuatiile (4.1) cu ri si sumand pe toate punctelesistemului, rezulta :
N∑
i=1
(ri ×miri) =N∑
i=1
(ri ×mi
dri
dt
)=
N∑
i=1
d
dt(ri ×miri) =
d
dt
N∑
i=1
(ri × pi) =dL
dt= L (4.13)
respectiv :N∑
i=1
(ri × Fi) = MO(F) (4.14)
unde MO(F) reprezinta momentul rezultant ın O al fortelor exterioare, iar :
N∑
i,j=1j 6=i
(ri×Fij) =N∑
i<j
[ (ri×Fij)+(rj×Fji) ] =N∑
i<j
[ (ri−rj)×Fij ] =N∑
i<j
(rij × Fij)︸ ︷︷ ︸0
= 0 (4.15)
unde ın calcule s-a tinut cont de principiul egalitatii actiunii cu reactiunea si ca rij ‖ Fij.Reunind rezultatele, se obtine ecuatia :
L = MO(F) (4.16)
Teorema momentului cinetic exprima faptul ca miscarea sistemului se face astfelıncat ın orice moment derivata momentului cinetic total ın raport cu timpuleste egala cu momentul rezultant al fortelor exterioare. Evident, ambele marimisunt calculate ın raport cu aceeasi origine O . Similar cu (4.7), si ecuatia (4.16) prezintaavantajul ca este independenta de interactiuni.

78 CAPITOLUL 4. DINAMICA SISTEMELOR DE PUNCTE MATERIALE
Daca exista un punct O ın spatiu, ın raport cu care momentul rezultant al fortelor exte-rioare este nul, atunci ın tot cursul miscarii se conserva momentul cinetic total al sistemuluiın raport cu punctul respectiv :
N∑
i=1
(ri ×mivi) = 2N∑
i=1
miΩi = L0 unde L0 =N∑
i=1
(r0i ×miv
0i ) = 2
N∑
i=1
miΩ0i (4.17)
Proiectia momentului cinetic total pe orice axa care trece prin O va fi de asemenea oconstanta. Poate fi formulata astfel teorema ariilor care afirma ca ariile descrise deproiectiile punctelor sistemului pe orice plan care trece prin O , ınmultite cu ma-sele respective si sumate, dau o constanta . Ariile respective vor fi maxime ın planulperpendicular pe vectorul L0 . Daca axa este de tip Oz , atunci :
N∑
i=1
(ri ×mivi) · k = 2N∑
i=1
miΩi · k = const (4.18)
Deoarece ın coordonate polare Ωi · k =1
2r2i θi , din (4.18) rezulta
N∑
i=1
mir2i θi = const , ceea ce
ınseamna ca atunci cand o parte din proiectiile punctelor sistemului se misca ıntr-un sens(θ > 0) , proiectiile celorlalte puncte trebuie sa se miste ın sens contrar (θ < 0) . Evident,toate aceste observatii ısi pastreaza valabilitatea si pentru un sistem ınchis .
Teorema ıntai a lui Koenig
Sa observam ca din teorema impulsului p = F si teorema miscarii centrului de masaM rc = F , rezulta ca impulsul total al sistemului coincide cu impulsul centruluide masa , ın care se considera ca este concentrata ıntreaga masa a sistemului. In cazulmomentului cinetic total situatia este ceva mai complexa. Presupunand ca centrul de masaconstituie originea unui sistem de referinta avand vectorul de pozitie rc ın raport cu O sinotand cu r′i vectorul de pozitie al unui punct Pi ın raport cu acest sistem, se va putea scrie :
ri = rc + r′ivi = vc + v′i
; i = 1, . . . , N (4.19)
unde vc = rc este viteza centrului de masa, iar v′i = r′i este viteza punctului Pi ın raport cucentrul de masa. Inlocuind (4.19) ın definitia (4.12), rezulta :
L =N∑
i=1
(ri ×mivi) =N∑
i=1
[ (rc + r′i)×mi(vc + v′i) ] = (4.20)
= rc ×(
N∑
i=1
mi
)vc +
N∑
i=1
(r′i ×miv′i) +
(N∑
i=1
mir′i
)× vc + rc × d
dt
(N∑
i=1
mir′i
)
Contributiile ultimilor doi termeni sunt nule, deoarece se poate verifica direct din definitia
(4.9) pentru vectorul de pozitie al centrului de masa caN∑
i=1
mir′i = 0 . In concluzie
L = rc ×M vc + L′ unde L′ =N∑
i=1
(r′i ×miv′i) (4.21)

4.1. TEOREME GENERALE 79
care exprima teorema ıntai a lui Koenig conforma careia momentul cinetic al siste-mului ın raport cu O se compune din momentul cinetic al sistemului calculat ınipoteza ca ıntreaga sa masa ar fi concentrata ın centrul de masa si din momentulcinetic datorat miscarii sistemului ın raport cu centrul de masa. Se observa ca ıngeneral momentul cinetic total L depinde de alegerea originii O . Doar ın situatia ın carecentrul de masa este imobil ın raport cu O (vc = 0), momentul cinetic L este independent deacest punct, el reducandu-se la momentul cinetic al sistemului ın raport cu centrul de masa.
Teorema momentului cinetic, precum si consecintele sale, ısi pastreaza valabilitatea ınsistemul de referinta avand originea ın centrul de masa. Intr-adevar, derivand (4.21) dupatimp si folosind teorema miscarii centrului de masa, rezulta :
L =d
dt(rc ×M vc) + L′ = rc ×M rc + L′ = rc × F + L′ (4.22)
Pe de alta parte :
MO(F) =N∑
i=1
[ (rc + r′i)× Fi ] = rc ×(
N∑
i=1
Fi
)+
N∑
i=1
(r′i × Fi) = rc × F + M′(F) (4.23)
Inlocuind ın (4.16), teorema momentului cinetic devine :
L′ = M′(F) (4.24)
ceea ce confirma afirmatia anterioara.Teorema ariilor ın raport cu o axa care trece prin centrul de masa explica experienta
cunoscuta sub numele de scaunul lui Prandtl . Daca o persoana sta ın pozitie verticalape un suport orizontal circular care se poate roti liber, centrul de masa al persoanei fiindsituat pe prelungirea axei suportului si persoana tine ın maini o roata de bicicleta avand
Figura 4.1: Scaunul lui Prandtl
osia ın lungul aceleiasi axe, iar pe circumferinta rotii sunt distribuite cat mai uniform masede plumb, atunci punerea ın miscare a rotii provoaca o rotatie ın sens contrar a persoanei sideci a suportului circular orizontal.

80 CAPITOLUL 4. DINAMICA SISTEMELOR DE PUNCTE MATERIALE
Trebuie remarcat ca ecuatiile (4.7) si (4.16) sunt suficiente pentru determinarea miscariinumai ın cazul solidului rigid (care, dupa cum se va vedea, poate avea cel mult sase gradede libertate), precum si ın cazul studiului sistemului format din doua puncte materiale.Teorema impulsului va descrie deplasarea spatiala a sistemului, iar teorema momentuluicinetic va descrie rotatia sa.
4.1.3 Teorema energiei
Energia cinetica totala a sistemului de puncte materiale reprezinta prin definitie marimeascalara :
T =1
2
N∑
i=1
miv2i =
1
2
N∑
i=1
miv2i =
1
2
N∑
i=1
mir2i (4.25)
Inmultind scalar fiecare din ecuatiile (4.1) cu dri si sumand pe toate punctele sistemului,rezulta pentru membrul stang expresia :
N∑
i=1
miridri =N∑
i=1
miriridt =N∑
i=1
miridri = d
(1
2
N∑
i=1
mir2i
)= dT (4.26)
Notand cu :
dLext =N∑
i=1
Fidri (4.27)
lucrul mecanic elementar al fortelor exterioare si cu :
dLint =N∑
i,j=1j 6=i
Fijdri (4.28)
lucrul mecanic elementar al fortelor interioare, se obtine ın final :
dT = dLext + dLint (4.29)
Teorema energiei afirma ca miscarea sistemului se face astfel ıncat ın orice momentdiferentiala energiei cinetice totale este egala cu suma dintre lucrul mecanicelementar al fortelor exterioare si lucrul mecanic elementar al fortelor interioare .
Presupunand ca fortele care actioneaza asupra punctelor sistemului pot fi potentiale,giroscopice si disipative si tinand cont ca lucrul mecanic al fortelor giroscopice este nul, seva putea scrie :
dLext =N∑
i=1
Fpi dri +
N∑
i=1
Fdi dri
dLint =N∑
i,j=1j 6=i
Fpijdri +
N∑
i,j=1j 6=i
Fdijdri
(4.30)
Pentru fortele potentiale exterioare exista functiile scalare V ei (t, ri) ; i = 1, . . . , N asa
ıncat :Fp
i = −∇iVei (4.31)

4.1. TEOREME GENERALE 81
unde ∇i reprezinta operatorul gradient ın care derivatele se efectueaza ın raport cu coordo-natele punctului Pi . Notand functia de potential a sistemului ın camp extern cu :
V e =N∑
i=1
V ei (t, ri) (4.32)
si observand ca V e = V e(t, r1, . . . , rN) , lucrul mecanic elementar al fortelor potentiale exte-rioare va avea expresia :
N∑
i=1
Fpi dri = − dV e +
∂V e
∂tdt (4.33)
In ceea ce priveste fortele potentiale interioare Fpij , ele fiind forte de interactiune ıntre
doua particule, daca ele deriva dintr-o functie de potential Vij , aceasta trebuie sa depindanumai de distanta reciproca dintre cele doua particule :
Vij = Vij(|ri − rj|) (4.34)
deoarece ın caz contrar fortele nu ar satisface la principiul egalitatii actiunii cu reactiunea.Intr-adevar, daca fortele sunt potentiale, conforma definitiei va trebui ca :
Fpij = −∇iVij , Fp
ji = −∇jVij (4.35)
Efectuand notatiile :
rij = ri − rj ; rij ≡ |rij| = |ri − rj| (4.36)
si observand ca ın ipoteza (4.34) va trebui ca :
∇iVij =dVij
drij
rij
rij
(4.37)
se verifica direct egalitatea :∇iVij = −∇jVij (4.38)
Inlocuind aici relatiile (4.35) rezulta ca ıntr-adevar fortele interioare satisfac la ecuatia :
Fpij + Fp
ji = 0 (4.39)
iar ın conformitate cu (4.37) ele sunt orientate ın lungul liniei drepte care uneste cele douapuncte.
Lucrul mecanic elementar al fortelor potentiale interioare va fi :
N∑
i,j=1j 6=i
Fpijdri =
N∑
i<j
(Fp
ijdri + Fpjidrj
)=
N∑
i<j
Fpij d(ri − rj) = −∑
i<j
∇iVij drij (4.40)
= −N∑
i<j
dVij
drij
drij = −N∑
i<j
dVij = − 1
2
N∑
i,j=1j 6=i
dVij = − d
1
2
N∑
i,j=1j 6=i
Vij
= − dV in

82 CAPITOLUL 4. DINAMICA SISTEMELOR DE PUNCTE MATERIALE
unde :
V in =1
2
N∑
i,j=1j 6=i
Vij(|ri − rj|) (4.41)
reprezinta energia potentiala interna a sistemului, care este ın general diferita de zero sise poate modifica odata cu evolutia ın timp a sistemului. Doar ın cazul solidului rigid, canddistantele reciproce dintre oricare doua puncte ale sale nu se modifica ın cursul miscarii,fortele interioare nu efectueaza lucru mecanic si V in = const .
Energia potentiala V a sistemului de puncte va fi suma :
V = V e + V in =N∑
i=1
V ei (t, ri) +
1
2
N∑
i,j=1j 6=i
Vij(|ri − rj|) (4.42)
Definind energia mecanica totala E a sistemului ca :
E = T + V (4.43)
si folosind relatiile anterioare, rezulta :
E =dT
dt+
dV
dt=
dLext
dt+
dLint
dt+
dV e
dt+
dV in
dt=
∂V e
∂t+
N∑
i=1
Fdi vi +
N∑
i,j=1j 6=i
Fdij vi (4.44)
In consecinta, daca asupra punctelor care alcatuiesc sistemul nu actioneaza fortedisipative exterioare sau interioare, iar energia potentiala a sistemului ın campextern nu depinde explicit de timp, atunci energia mecanica totala a sistemuluise conserva (integrala energiei) :
E =1
2
N∑
i=1
miv2i +
N∑
i=1
V ei (ri) +
1
2
N∑
i,j=1j 6=i
Vij(|ri − rj|) = h (4.45)
Un astfel de sistem va fi numit conservativ.
Teorema a doua a lui Koenig
Inlocuind ın definitia (4.25) viteza punctului prin suma dintre viteza centrului de masasi viteza ın raport cu centrul de masa, rezulta :
T =1
2
N∑
i=1
miv2i =
1
2
N∑
i=1
mi(vc +v′i)(vc +v′i) =1
2
(N∑
i=1
mi
)v2
c +1
2
N∑
i=1
miv′ 2i +vc
d
dt
(N∑
i=1
mir′i
)
(4.46)Deoarece contributia ultimului termen este nula, se va putea scrie :
T =1
2Mv2
c + T ′ unde T ′ =1
2
N∑
i=1
miv′ 2i (4.47)

4.1. TEOREME GENERALE 83
ceea ce exprima teorema a doua a lui Koenig, conform careia energia cinetica totalaa sistemului se compune din energia cinetica a sistemului calculata ın ipotezaca ıntreaga sa masa ar fi concentrata ın centrul de masa si din energia cineticadatorata miscarii sistemului ın raport cu centrul de masa.
Teorema energiei ısi pastreaza forma si ıntr-un sistem de referinta cu originea ın centrulde masa. Deoarece ri = rc+r′i , folosind si teorema miscarii centrului de masa, lucrul mecanicelementar al fortelor exterioare poate fi scris sub forma :
dLext =N∑
i=1
Fidri =
(N∑
i=1
Fi
)drc +
N∑
i=1
Fidr′i = F drc + dL′ext = d
(1
2M v2
c
)+ dL′ext (4.48)
Lucrul mecanic elementar al fortelor interioare poate fi evaluat ın mod asemanator :
dLint =N∑
i,j=1j 6=i
Fijdri =N∑
i<j
[ (Fij + Fji)︸ ︷︷ ︸0
] drc +N∑
i,j=1j 6=i
Fijdr′i = dL′int (4.49)
observandu-se ca acesta nu depinde de sistemul de referinta ales. Prin diferentierea relatiei(4.47) si ınlocuirea rezultatelor ın teorema energiei (4.29), rezulta ın final :
dT ′ = dL′ext + dL′int (4.50)
Teoremele generale prezentate nu ısi modifica substantial forma daca sistemului ıi sunt im-puse anumite legaturi . Observand ca legaturile pot fi atat interioare (de exemplu conditiilede rigiditate), cat si exterioare, prezenta acestora se manifesta ın ecuatiile de miscare prinreactiunile corespunzatoare, asa ıncat sub actiunea fortelor efectiv aplicate si a fortelor dereactiune ale legaturilor, sistemul sa poata fi considerat liber. Teorema impulsului va aveaforma generala :
p = F + R (4.51)
unde R este rezultanta reactiunilor legaturilor exterioare, iar teorema momentului cinetic seva scrie :
L = MO(F) + MO(R) (4.52)
unde MO(R) este momentul rezultant ın O al reactiunilor legaturilor exterioare. In ceea cepriveste variatia energiei mecanice totale, ın membrul drept al expresiei (4.44) pentru E vamai trebui adaugat un termen general avand forma :
N∑
i=1
Ri vi (4.53)
care corespunde puterii ansamblului de reactiuni ale legaturilor. Se va arata ulterior ca acesttermen se anuleaza numai ın cazul legaturilor olonome ideale stationare.
Problema determinarii miscarii sistemelor de puncte materiale libere, sau supuse lalegaturi, este suficient de complexa, asa ıncat folosirea metodelor mecanicii newtoniene ducela rezultate semnificative doar ın cateva cazuri particulare, cum ar fi problema celor douacorpuri, sau cand este studiata miscarea solidului rigid.

84 CAPITOLUL 4. DINAMICA SISTEMELOR DE PUNCTE MATERIALE
∗∗ ∗
In ıncheierea acestor consideratii trebuie mentionat ca legile de conservare prezentatesunt obtinute ca o consecinta a ecuatiei de miscare a lui Newton. Din acest motiv elesunt legate de proprietatile pentru spatiu si pentru timp care sunt postulate ın mecanicaclasica. Aceste dependente pot fi studiate cel mai bine ın cazul particular al sistemuluiınchis. Astfel, conservarea impulsului este legata de omogenitatea spatiului, proprietatilemecanice ale unui sistem ınchis nemodificandu-se la o translatie a sistemului considerat caun ıntreg ; conservarea momentului cinetic este legata de izotropia spatiului, proprietatileunui sistem ınchis ramanand aceleasi la o rotatie a sistemului ; conservarea energiei mecaniceeste legata de omogenitatea timpului, conform careia proprietatile mecanice ale unui sistemnu se modifica la o translatie a originii timpului.
Trebuie subliniat ca legile de conservare raman valabile si pentru sistemele ınchise ın caremiscarea obiectelor nu este descrisa de legile lui Newton, ceea ce face ca importanta legilorde conservare sa depaseasca limitele mecanicii clasice.
Capitolul 5
Solidul rigid
5.1 Precizarea pozitiei rigidului ın spatiu
5.1.1 Gradele de libertate ale rigidului
Solidul rigid reprezinta un sistem de puncte materiale caracterizat prin proprietatea cadistantele reciproce dintre oricare doua puncte ale sale raman constante ın cursul miscarii.Conceptul este evident o idealizare, deoarece orice corp asupra caruia actioneaza forte se de-formeaza, ınsa daca deplasarile relative ale punctelor care alcatuiesc sistemul sunt neglijabileın raport cu deplasarile punctelor datorita miscarii de ansamblu a corpului, atunci ın bunaaproximatie corpul respectiv poate fi considerat un solid rigid .
Pentru a determina numarul parametrilor independenti necesari pentru a definipozitia la un moment dat a rigidului ın spatiu, se porneste de la observatia ca pentru defi-nirea pozitiei unui sistem de N puncte materiale ıntre care nu exista legaturi, sunt necesariun numar de 3N parametri, sistemul avand astfel 3N grade de libertate. Daca ıntre cei3N parametri exista m relatii (legaturi), atunci numarul gradelor de libertate scade lan = 3N −m . In cazul solidului rigid, asimilat unui sistem de N puncte, ar trebui sa existem = C2
N legaturi avand ecuatiile :
|ri − rj| =√
(xi − xj)2 + (yi − yj)2 + (zi − zj)2 = const . ;
i, j = 1, . . . , N
i 6= j(5.1)
care exprima conditiile de rigiditate si s-ar parea ca rigidul are n = 3N − N(N − 1)
2grade de libertate. Rezultatul nu este corect, deoarece pentru N suficient de mare (N > 8),rezulta m > 3N si calculul numarului de grade de libertate cu formula mentionata devineun nonsens.
In realitate numarul gradelor de libertate ale rigidului liber este sase , cu exceptiacazului N = 2 cand numarul gradelor de libertate scade la cinci. (Se spune despre un rigidca este liber, daca nu ıi sunt impuse alte legaturi, ın afara celor de rigiditate.) Observatiase datoreste faptului ca nu toate legaturile de forma (5.1) sunt independente. Demonstratiapoate fi facuta fie analitic, fie grafic. Intr-adevar, pentru N = 2 rezulta n = 3 · 2− 1 = 5 , iarpentru N = 3 rezulta n = 3 · 3− 3 = 6 . Pentru N = 4 exista 3 · 4 = 12 coordonate, pe langacele trei legaturi anterioare intervenind suplimentar trei legaturi, anume cele corespunzatoare
85

86 CAPITOLUL 5. SOLIDUL RIGID
segmentelor P4P1 , P4P2 si P4P3 (v. Fig. 5.1), deci n = 12− 6 = 6 . Pentru N = 5 numarulcoordonatelor este 3 ·5 = 15 , ınsa pe langa cele sase legaturi anterioare nu intervin decat treilegaturi distincte, corespunzatoare distantelor de la punctul P5 la cele trei puncte necoliniareP1 , P2 P3 , distanta P5P4 fiind unic determinata din geometria figurii. Rationamentul poatefi continuat, observandu-se ca fiecare punct introduce suplimentar trei coordonate si treilegaturi distincte, asa ıncat pentru N ≥ 3 numarul gradelor de libertate ale rigidului libereste ıntotdeauna n = 6 .
Figura 5.1: Solidul rigid - legaturile independente
Daca rigidului ıi sunt impuse anumite legaturi suplimentare, numarul gradelor de libertatescade. Astfel, rigidul cu punct fix are trei grade de libertate, fiind necesari trei parametripentru precizarea starii sale de rotatie ın spatiu, iar rigidul cu axa fixa are un singur gradde libertate, fiind suficient un singur parametru pentru precizarea rotatiei sale ın jurul axei.
5.1.2 Matricea de rotatie
Revenind la cazul rigidului liber , se pune problema alegerii celor sase parametriindependenti cu ajutorul carora sa fie descrisa pozitia rigidului ın spatiu. Considerand unsistem de referinta fix O1x1y1z1 si unul mobil Oxyz solidar legat de rigid, pozitia rigiduluila un moment dat este definita de pozitia sistemului Oxyz ın raport cu cel fix (v. Fig. 5.2).Problema este similara cu cea ıntalnita la studiul miscarii relative, motiv pentru care vor fifolosite aceleasi notatii. Trei parametri vor defini pozitia originii O a sistemului solidarlegat de rigid ın raport cu sistemul de referinta fix (ın multe aplicatii O este ales ın centrulde masa al rigidului), iar alti trei parametri vor preciza orientarile axelor sistemului mobil,ın raport cu orientarile axelor sistemului fix. Aceste orientari pot fi definite cu ajutorulcosinusilor directori ai axelor sistemului Oxyz ın raport cu axele sistemului O′x′y′z′ con-struit prin translatia sistemului fix ın originea sistemului mobil (O ≡ O′). Cosinusii directorifigureaza explicit ın expresiile :
i = (i · i′) i′ + (i · j′) j′ + (i · k′)k′j = (j · i′) j′ + (j · j′) j′ + (j · k′)k′k = (k · i′) i′ + (k · j′) j′ + (k · k′)k′
(5.2)

5.1. PRECIZAREA POZITIEI RIGIDULUI IN SPATIU 87
Figura 5.2: Sistemul de referinta solidar legat de rigid
Folosind notatiile :
e1 = i e′1 = i′
e2 = j e′2 = j′
e3 = k e′3 = k′si
x1 = x x′1 = x′
x2 = y x′2 = y′
x3 = z x′3 = z′(5.3)
cosinusii directori vor fi :
aij = (ei , e′j) = cos(Oxi, Ox′j) ; i, j = 1, 2, 3 (5.4)
iar relatiile (5.2) capata forma compacta :
ei =3∑
j=1
aije′j ; i = 1, 2, 3 (5.5)
Deoarece orice vector, ın particular vectorul de pozitie r , are componentele xi = (r · ei)ın baza (e1, e2, e3) , folosind (5.5) se va putea scrie :
xi = (r · ei) =3∑
j=1
aij(r · e′j) =3∑
j=1
aijx′j ; i = 1, 2, 3 (5.6)
unde x′i = (r · e′i) ; i = 1, 2, 3 reprezinta componentele aceluiasi vector ın baza (e′1, e′2, e
′3) .
Aceste expresii pot fi adoptate ca relatii de definitie pentru un vector. Se spune ca un ansam-blu de trei scalari xi ; i = 1, 2, 3 formeaza componentele unui vector, daca la o transformarea bazei definita de (5.5), scalarii respectivi se transforma dupa formulele (5.6).
Cu notatiile matriceale :
r =
x1
x2
x3
, r′ =
x′1x′2x′3
si A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
(5.7)
ecuatiile (5.6) se transcriu sub forma matriceala simpla :
r = Ar′ (5.8)

88 CAPITOLUL 5. SOLIDUL RIGID
Cei noua cosinusi directori (5.4) nu sunt toti independenti ıntre ei. Pentru a gasi relatiiledintre cosinusii directori, se porneste de la proprietatea ca indiferent de sistemul de coordo-nate folosit, marimea (modulul) vectorului nu se modifica, deci :
3∑
k=1
x2k =
3∑
k=1
x′ 2k (5.9)
adica :3∑
k=1
(3∑
i=1
akix′i
)
3∑
j=1
akjx′j
=
3∑
i,j=1
(3∑
k=1
akiakj
)x′ix
′j (5.10)
Pentru ca proprietatea (5.9) sa fie ındeplinita, va trebui ca :
3∑
k=1
akiakj = δij ; i, j = 1, 2, 3 (5.11)
sau, folosind notatiile matriceale :
AA = I unde I =
1 0 00 1 00 0 1
(5.12)
unde A reprezinta transpusa matricei A . Se observa ca exista ın total sase relatii indepen-dente de forma (5.11), asa ıncat vor fi suficienti trei cosinusi directori pentru a precizaorientarile axelor sistemului solidar legat de rigid fata de axele sistemului fix.
O transformare ın urma careia componentele unui vector se transforma dupa relatiile(5.6), fiind ındeplinite totodata conditiile (5.11), poarta numele de transformare ortogo-nala , iar matricea A este numita matrice ortogonala .
O consecinta directa a relatiei de ortogonalitate este aceea ca inversa matricei A coincidecu transpusa : A−1 = A . Intr-adevar, ınmultind la dreapta egalitatea (5.12) cu A−1 rezultaAAA−1 = A−1 , adica A = A−1 . Folosind aceasta proprietate, prin ınmultirea la stanga arelatiei (5.8) cu A−1 rezulta :
r′ = A−1 r = A r (5.13)
adica :
x′i =3∑
j=1
a−1ij xj =
3∑
j=1
ajixj ; i = 1, 2, 3 (5.14)
Aceasta ınseamna ca pentru a realiza transformarea inversa , nu este necesara evaluareainversei matricei, putand fi utilizata ın acelasi scop si transpusa matricei respective, prinaplicarea regulii (5.14). Deoarece A−1 este de asemenea o matrice ortogonala, se va puteascrie ca :
3∑
k=1
a−1ki a−1
kj =3∑
k=1
aikajk = δij ; i, j = 1, 2, 3 (5.15)
obtinandu-se astfel o alta forma a relatiei de ortogonalitate.

5.1. PRECIZAREA POZITIEI RIGIDULUI IN SPATIU 89
5.1.3 Unghiurile Euler. Vectorul rotatie
In paragraful anterior s-a aratat ca pentru a preciza orientarile axelor sistemului Oxyzsolidar legat de rigid, fata de orientarile axelor sistemului fix O′x′y′z′ , sunt suficienti treiparametri scalari independenti, care pot fi trei din cei noua cosinusi directori continuti ınmatricea de rotatie A . Pentru a avea o reprezentare mai intuitiva asupra orientarilor axe-lor sistemului mobil, pot fi folosite la fel de bine si cele trei unghiuri Euler , aflate ıncorespondenta biunivoca cu cosinusii directori.
Notand cu ON linia dupa care se intersecteaza planele x′Oy′ si xOy si numind-o linianodurilor (v. Fig. 5.3), pot fi definite urmatoarele trei unghiuri :
– unghiul de precesie notat de obicei cu ψ , care reprezinta unghiul dintre axa Ox′ asistemului fix si linia nodurilor ON ;
– unghiul de rotatie proprie notat de obicei cu ϕ , care reprezinta unghiul dintre ONsi axa Ox a sistemului solidar legat de rigid ;
– unghiul de nutatie notat cu θ , care reprezinta unghiul dintre axa Oz′ a sistemuluifix si axa Oz a sistemului mobil.
Figura 5.3: Unghiurile Euler
Se observa ca sistemul Oxyz poate fi obtinut din sistemul Ox′y′z′ prin trei rotatii succe-sive :
a) o rotatie cu unghiul ψ ın jurul axei Oz′ a sistemului fix :
ξ = Dr′ ; D =
cos ψ sin ψ 0− sin ψ cos ψ 0
0 0 1
(5.16)
unde ξ desemneaza componentele vectorului de pozitie ın sistemul rotit, iar D reprezintamatricea de rotatie corespunzatoare ;

90 CAPITOLUL 5. SOLIDUL RIGID
b) o rotatie cu unghiul θ ın jurul liniei nodurilor ON :
ξ′ = C ξ ; C =
1 0 00 cos θ sin θ0 − sin θ cos θ
(5.17)
unde ξ′ desemneaza componentele vectorului de pozitie ın noul sistem rotit, iar C reprezintamatricea de rotatie corespunzatoare ;
c) o rotatie cu unghiul ϕ ın jurul axei Oz a sistemului mobil :
r = B ξ′ ; B =
cos ϕ sin ϕ 0− sin ϕ cos ϕ 0
0 0 1
(5.18)
unde r desemneaza componentele vectorului de pozitie ın sistemul solidar legat de rigid, iarB reprezinta matricea de rotatie corespunzatoare.
Se poate verifica direct ca ordinea indicata pentru efectuarea rotatiilor este obligatorie.Reunind rezultatele, componentele unui vector ın sistemul solidar legat de rigid (rotit), dacasunt cunoscute componentele aceluiasi vector ın sistemul fix, sunt date de formula :
r = B ξ′ = BC ξ = BCDr′ = Ar′ (5.19)
matricea de rotatie A = BCD exprimata folosind unghiurile Euler avand expresia :
A =
cos ψ cos ϕ− sin ψ sin ϕ cos θ sin ψ cos ϕ + cos ψ sin ϕ cos θ sin ϕ sin θ
− cos ψ sin ϕ− sin ψ cos ϕ cos θ − sin ψ sin ϕ + cos ψ cos ϕ cos θ cos ϕ sin θ
sin ψ sin θ − cos ψ sin θ cos θ
(5.20)Deoarece produsul a doua matrice nu este ın general comutativ, este obligatorie ordineaindicata ın (5.19) pentru efectuarea ınmultirii matricelor.
Invers, daca ne intereseaza componentele unui vector ın sistemul fix, fiind cunoscutecomponentele aceluiasi vector ın sistemul mobil, va trebui efectuata transformarea r′ = A r .Rotatiile vor fi realizate ın ordinea : a) cu unghiul −ϕ ın jurul axei Oz a sistemului mobil ; b)cu unghiul −θ ın jurul liniei nodurilor ON ; c) cu unghiul −ψ ın jurul axei Oz′ a sistemuluifix. Facand aceste ınlocuiri ın matricea (5.20) si schimband ıntre ele unghiurile ψ si ϕ , seobtine chiar matricea transpusa A .
Se stie de la studiul miscarii relative, ca orientarile la un moment dat ale axelor sistemuluisolidar legat de rigid, pot fi precizate si cu ajutorul celor trei componente scalare ale vec-torului rotatie . Acestea pot fi exprimate cu ajutorul unghiurilor Euler aplicand definitiilecunoscute, ın care se fac ınlocuirile (5.5). Deoarece calculele sunt destul de complexe, seprefera calculul componentelor vectorului ω pornind de la observatia ca daca rigidul seroteste ın sens direct trigonometric ın jurul unei axe, vectorul rotatie este orien-tat ın sensul pozitiv al axei respective, marimea sa fiind chiar derivata unghiuluide rotatie . Deoarece sistemul Oxyz se obtine din sistemul Ox′y′z′ prin intermediul ce-lor trei rotatii succesive mentionate anterior, tinant cont si de faptul ca doua sau mai multe

5.1. PRECIZAREA POZITIEI RIGIDULUI IN SPATIU 91
Figura 5.4: Vectorul rotatie ω
rotatii concurente pot fi ınlocuite printr-o rotatie unica a carei vector rotatie reprezinta sumavectoriala a vectorilor rotatie corespunzatori rotatiilor individuale, se va putea scrie :
ω = ωψ + ωθ + ωϕ ; |ωψ| = ψ , |ωθ| = θ , |ωϕ| = ϕ (5.21)
unde ωψ este orientat dupa axa Oz′ si are marimea ψ , ωθ este orientat dupa axa ON si aremarimea θ , iar ωϕ este orientat dupa axa Oz si are marimea ϕ, suportul lui ω trecand deasemenea prin O (v. Fig. 5.4) .
Marimea vectorului rotatie poate fi calculata foarte usor observand ca vectorul ωθ esteıntotdeauna perpendicular pe vectorul ωψ + ωϕ . In consecinta, folosind si (5.21), rezulta :
ω2 = ω2 = [ (ωψ + ωϕ) + ωθ ]2 = (ωψ + ωϕ)2 + ω2θ = ψ2 + ϕ2 + θ2 + 2 ψϕ cos θ (5.22)
Utilizand formulele de transformare scrise anterior, pot fi calculate componentele vecto-rului rotatie ın oricare din sistemele de coordonate mentionate. Din examinarea figurii 5.4rezulta ca expresia matriceala pentru calculul componentelor vectorului ω ın sistemul dereferinta solidar legat de rigid, are forma generala :
ω = Aωψ + Bωθ + ωϕ = A ·
00
ψ
+ B ·
θ00
+
00ϕ
(5.23)
de unde, folosind (5.20) si (5.18), rezulta :
ωx = ψ sin ϕ sin θ + θ cos ϕ
ωy = ψ cos ϕ sin θ − θ sin ϕ
ωz = ψ cos θ + ϕ
(5.24)
Un rationament analog permite calculul componentelor aceluiasi vector ın sistemul dereferinta fix :
ω = ωψ + Dωθ + Aωϕ =
00
ψ
+ D ·
θ00
+ A ·
00ϕ
(5.25)

92 CAPITOLUL 5. SOLIDUL RIGID
adica :ωx′ = ϕ sin ψ sin θ + θ cos ψ
ωy′ = − ϕ cos ψ sin θ + θ sin ψ
ωz′ = ϕ cos θ + ψ
(5.26)
In acelasi scop poate fi folosita si transformarea generala ω′ = Aω .Expresiile (5.24) si (5.26) poarta numele generic de formulele cinematice ale lui Eu-
ler . Odata cunoscute dependentele de timp ale componentelor vectorului rotatie, unghiurileEuler pot fi calculate ca solutii ale unui sistem de trei ecuatii diferentiale de ordinul ıntai.De exemplu, pornind de la expresiile (5.24) pot fi deduse usor ecuatiile :
ψ =1
sin θ(ωx sin ϕ + ωy cos ϕ)
θ = ωx cos ϕ− ωy sin ϕ (5.27)
ϕ = ωz − ctg θ (ωx sin ϕ + ωy cos ϕ)
Aplicatii
1. Miscarea unui sistem de referinta mobil S ın raport cu un sistem de referinta fix S1 avandaceeasi origine este descrisa de ecuatiile ψ = ω0t, θ = θ0, ϕ = ω0t, unde ψ, θ si ϕ sunt unghiurileEuler. Un punct descrie ın planul xOy, ın sensul acelor de ceasornic, o traiectorie circulara deraza R, cu centrul ın O si cu viteza unghiulara constanta ω0 . Sa se scrie ecuatia de miscare apunctului ın raport cu sistemul fix si sa se calculeze componentele ın raport cu S1 pentru urmatoriivectori : va, vr, vt, aa, ar, at, ac.
Rezolvare : Conform enuntului, ecuatia de miscare a punctului ın sistemul S este :
r = R (cos ω0t · i− sin ω0t · j) (1)
deci :vr = −ω0R (sin ω0t · i + cos ω0t · j)ar = −ω2
0R (cos ω0t · i− sin ω0t · j) = −ω20 · r
(2)
Componentele versorilor i, j si k ın sistemul S1 se calculeaza folosind relatia :
i
j
k
=
cos2 ω0t− sin2 ω0t cos θ0 sin ω0t cos ω0t (1 + cos θ0) sin ω0t sin θ0
− sin ω0t cos ω0t (1 + cos θ0) − sin2 ω0t + cos2 ω0t cos θ0 cos ω0t sin θ0
sin ω0t sin θ0 − cos ω0t sin θ0 cos θ0
·
i1
j1
k1
(3)

5.2. ELEMENTE DE CINEMATICA RIGIDULUI 93
Facand ınlocuirile, vor rezulta expresiile :
r = R (cos ω0t · i1 + sin ω0t · j1)vr = ω0R (sin ω0t cos θ0 · i1 − cos ω0t cos θ0 · j1 − sin θ0 · k1)
ar = −ω20R (cos ω0t · i1 + sin ω0t · j1) = −ω2
0 · r(4)
Pe de alta parte, derivand succesiv (4a) rezulta :
va = ω0R (− sin ω0t · i1 + cos ω0t · j1)aa = −ω2
0R (cos ω0t · i1 + sin ω0t · j1) = −ω20 · r
(5)
Folosind definitiile :va = vr + vt
aa = ar + at + ac
(6)
se obtine :
vt = va − vr = −ω0R [ sin ω0t (1 + cos θ0) · i1 − cos ω0t (1 + cos θ0) · j1 − sin θ0 · k1]
at = − ac
(7)
Deoarece ın sistemul S1 vectorul rotatie ω are componentele :
ωx1 = ω0 sin ω0t sin θ0
ωy1 = −ω0 cos ω0t sin θ0
ωz1 = −ω0 (1 + cos θ0)
(8)
pentru acceleratia Coriolis va rezulta expresia :
ac = 2 ω × vr = 2 ω20R (1 + cos θ0)(cos ω0t · i1 + sin ω0t · j1) = 2 ω2
0 (1 + cos θ0) · r (9)
Ultimul rezultat putea fi obtinut direct, deoarece :
ac = − at = − [ ω × r + ω × (ω × r)] = ω2 · r = 2 ω20 (1 + cos θ0) · r (10)
unde s-au folosit proprietatile evidente ω × r = 0 si ω · r = 0 .
5.2 Elemente de cinematica rigidului
Vitezele si acceleratiile diferitelor puncte care alcatuiesc rigidul sunt date de binecunos-cutele formule deduse ın cadrul studiului miscarii relative, cu observatia ca ın acest cazparticular, ın baza ipotezei de rigiditate, pozitia unui punct oarecare al rigidului este fixa ınraport cu cu sistemul de referinta legat solidar de rigid. Din acest motiv viteza absoluta siacceleratia absoluta a unui punct va coincide cu viteza de transport, respectiv cu acceleratiade transport :
v = vO + ω × r (5.28)
a = aO + ω × r + ω × (ω × r) (5.29)

94 CAPITOLUL 5. SOLIDUL RIGID
Aici vO si aO reprezinta viteza, respectiv acceleratia originii sistemului solidar legat de rigid,r este vectorul de pozitie al punctului considerat ın raport cu sistemul mobil, iar ω estevectorul rotatie care caracterizeaza rotatia sistemului mobil ın raport cu cel fix.
Se poate arata usor ca formula (5.28) care furnizeaza distributia de viteze ın rigid este oconsecinta directa a conditiei de rigiditate. Deoarece punctele O si P apartin rigidului, vatrebui ca ın tot cursul miscarii :
(r1 − rO)2 = const. (5.30)
Derivand dupa timp rezulta :(r1 − rO)(v − vO) = 0 (5.31)
adica :r · v = r · vO (5.32)
Astfel, pentru ca un sistem de puncte materiale sa se deplaseze ca un rigid, este necesarsi suficient ca proiectiile vitezelor a doua puncte, pe dreapta care le uneste, sa fie egale.
Figura 5.5: Vectorii de pozitie pentru punctele rigidului
Ecuatia (5.32) reprezinta o ecuatie vectoriala care permite determinarea lui v ın raportcu vO si r. Marimea vO este o solutie particulara a ecuatiei mentionate, solutia generalarezultand prin adaugarea la vO a unui vector arbitrar perpendicular pe r. Deoarece oricevector perpendicular pe r se poate scrie sub forma ω × r, cu ω un vector arbitrar, solutiagenerala a ecuatiei (5.32) se scrie v = vO + ω × r . Faptul ca vectorul ω este chiar vectorul
rotatie rezulta din aceea ca v − vO = r, deoareced′rdt
= 0 si ın consecinta solutia obtinuta
se poate scrie si sub forma r = ω× r, ceea ce este echivalent cu formulele de definitie ale luiPoisson pentru vectorul ω :
di
dt= ω × i ,
dj
dt= ω × j ,
dk
dt= ω × k (5.33)
Din demonstratie rezulta totodata ca din punctul de vedere al distributiei vitezelor,vectorul ω este un invariant fundamental, adica acelasi ın toate punctele rigiduluila un moment dat. Un alt parametru cinematic invariant fundamental este proiectiavectorului v pe ω. Intr-adevar, proiectand relatia vectoriala (5.28) pe vectorul ω rezulta :
v · ω = vO · ω (5.34)

5.2. ELEMENTE DE CINEMATICA RIGIDULUI 95
si cum punctul P este ales arbitrar, este evident ca ın oricare punct al rigidului proiectiavitezei sale pe vectorul ω este aceeasi, indiferent de unghiul pe care ıl fac cei doi vectori.
5.2.1 Miscarea de translatie
Presupunem ca ω = 0, deci rigidul se misca fara sa se roteasca. Conform formulelor(5.28) si (5.29), toate punctele rigidului vor avea aceeasi viteza vO si aceeasi acceleratie aO .Pentru doua puncte oarecare ale rigidului P si P ′, avand vectorii de pozitie r1 si r′1 ın raportcu sistemul fix, rezulta :
dPP′
dt=
dr′1dt
− dr1
dt= v′ − v = 0 deci PP′ = const. (5.35)
Se spune ca rigidul efectueaza o miscare de translatie daca ın cursul miscarii marimea sidirectia unui vector determinat de doua puncte alese arbitrar ın rigid raman nemodificate.Rigidul se misca astfel ıncat orice segment al sau ramane egal si paralel cu el ınsusi. Deasemenea ın cursul miscarii axele sistemului solidar legat de rigid ısi pastreaza orientarilenemodificate ın raport cu axele sistemului fix. Deoarece r′1 = r1 +PP′, traiectoria punctuluiP ′ poate fi obtinuta din traiectoria punctului P prin intermediul unei translatii geometricede vector PP′, asa ıncat cunoscand traiectoria descrisa ın cursul miscarii de un singur punct,sunt cunoscute traiectoriile tuturor punctelor care alcatuiesc sistemul rigid.
Se poate demonstra si afirmatia reciproca : daca ın cursul miscarii un segment al rigidului
ramane tot timpul egal si paralel cu el ınsusi, atunci ω = 0. Intr-adevar, din ˙PP′ = 0 rezultav = v′, adica :
vO + ω × r = vO + ω × r′ adica ω × (r′ − r) = 0 (5.36)
Deoarece vectorul r′ − r este arbitrar, ecuatia este satisfacuta doar daca ω = 0.
5.2.2 Miscarea de rotatie
Presupunem acum ca rO = 0, ceea ce ınseamna ca ın tot cursul miscarii originea sistemuluimobil coincide cu cea a sistemului fix. Distributia de viteze ın rigid se reduce la expresia :
v = ω × r (5.37)
de unde rezulta ca toate punctele rigidului situate pe suportul vectorului ω au viteza nula.Intr-adevar, pentru r = λ ω, din (5.37) rezulta v = 0 indiferent de λ. Viteza unui punctoarecare P care nu este situat pe suportul vecorului ω va fi :
v = ω × d (5.38)
unde d este vectorul de pozitie al lui P ın raport cu punctul A ın care planul, normal la ωsi care trece prin P , intersecteaza suportul lui ω (v. Fig. 5.6). Marimea vectorului v va fiv = ω d. Formula (5.38) spune ca viteza unui punct oarecare al rigidului este un vector situatın planul perpendicular pe ω si are valoarea cunoscuta din cazul miscarii circulare. Totodatatoate punctele situate pe o dreapta paralela la ω vor avea aceeasi viteza. In general, fiecare

96 CAPITOLUL 5. SOLIDUL RIGID
Figura 5.6: Miscarea de rotatie a rigidului
punct al rigidului executa o miscare circulara ın jurul directiei lui ω. Miscarea rigiduluicaracterizata prin aceste proprietati poarta numele de miscare de rotatie .
Pana acum s-a presupus implicit ca vectorul ω are o directie fixa. In cazul general directialui ω este functie de timp, ınsa si ın acest caz formula (5.38) ısi pastreaza valabilitatea. La unmoment de timp oarecare t distributia de viteze a punctelor rigidului va fi cea corespunzatoareunei rotatii ın jurul unei axe ω(t). Nu se poate afirma totusi ca avem de a face cu o rotatiepropriu-zisa a rigidului, deoarece la un moment infinit apropiat t+dt axa de rotatie va aveaalta orientare. Se spune ca rigidul realizeaza o rotatie instantanee ın jurul unei axe caretrece prin punctul fix O si care este suportul vectorului ω(t) la momentul respectiv, numitaaxa instantanee de rotatie. Aceasta observatie este cunoscuta sub numele de teoremalui Euler. Miscarea generala a rigidului cu punct fix va fi o succesiune de rotatii instantaneerealizate ın jurul unor axe variabile care trec prin O.
Locul geometric al axelor instantanee de rotatie ın raport cu sistemul de referinta mobilva fi o suprafata riglata numita con polodic, iar locul geometric al axelor instantaneede rotatie ın raport cu sistemul fix va fi o alta suprafata riglata numita con herpolodic.Ecuatia conului polodic se deduce observand ca coordonatele unui punct oarecare A de peaxa instantanee de rotatie la momentul t ın sistemul mobil au expresiile :
x = λωx(t) , y = λωy(t) , z = λωz(t) (5.39)
unde λ este o constanta arbitrara, iar componentele vectorului ω sunt date de formulelecinematice (5.24) ale lui Euler. Eliminand pe λ si t din ecuatiile (5.39) se obtine ecuatiaconului polodic. Procedand analog, anume eliminand pe λ si t din ecuatiile :
x1 = λωx1(t) , y1 = λωy1(t) , z1 = λ ωz1(t) (5.40)
unde componentele lui ω sunt date de formulele (5.26), se va obtine ecuatia conului herpo-lodic.
Miscarea rigidului cu punct fix poate fi reprezentata ca o rostogolire fara alu-necare a conului polodic peste conul herpolodic, cele doua conuri fiind tangenteın fiecare moment ın lungul axei instantanee de rotatie. Intr-adevar, pentru un punctoarecare A de pe axa instantanee de rotatie, al carui vector de pozitie are componentele x1,y1, z1 ın sistemul fix si x, y, z ın sistemul mobil, se va putea scrie :
x1 i1 + y1 j1 + z1 k1 = x i + y j + z k (5.41)
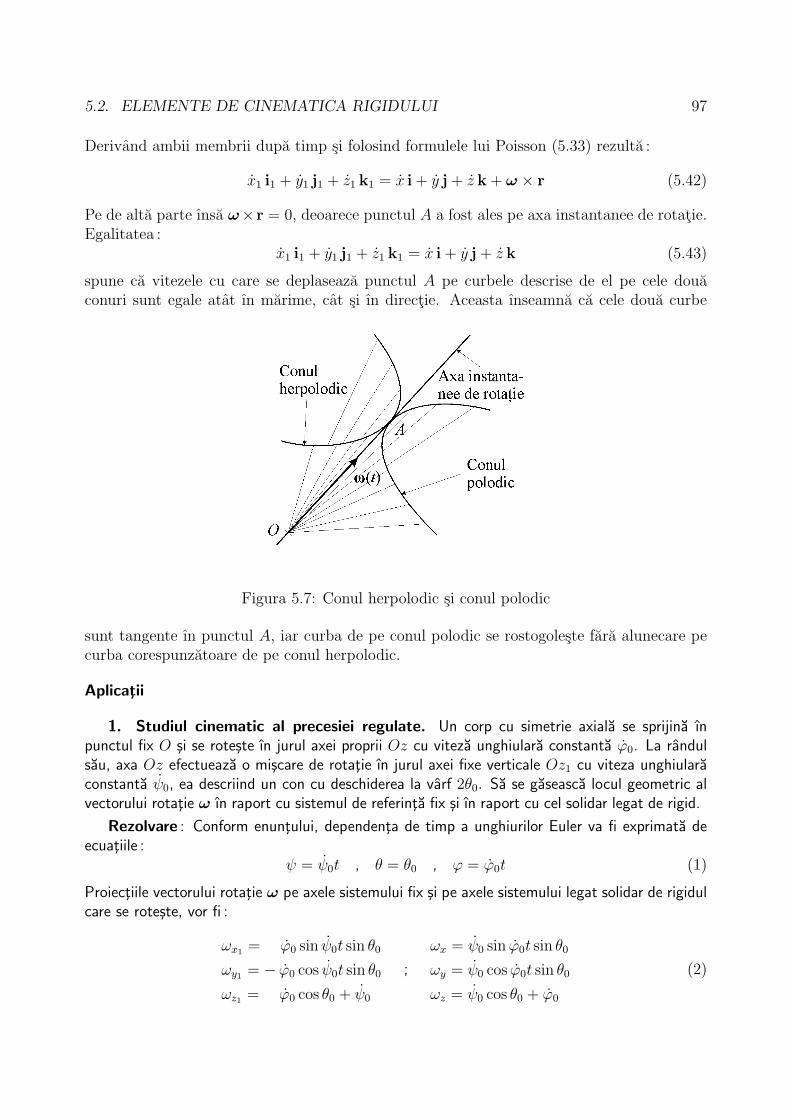
5.2. ELEMENTE DE CINEMATICA RIGIDULUI 97
Derivand ambii membrii dupa timp si folosind formulele lui Poisson (5.33) rezulta :
x1 i1 + y1 j1 + z1 k1 = x i + y j + z k + ω × r (5.42)
Pe de alta parte ınsa ω×r = 0, deoarece punctul A a fost ales pe axa instantanee de rotatie.Egalitatea :
x1 i1 + y1 j1 + z1 k1 = x i + y j + z k (5.43)
spune ca vitezele cu care se deplaseaza punctul A pe curbele descrise de el pe cele douaconuri sunt egale atat ın marime, cat si ın directie. Aceasta ınseamna ca cele doua curbe
Figura 5.7: Conul herpolodic si conul polodic
sunt tangente ın punctul A, iar curba de pe conul polodic se rostogoleste fara alunecare pecurba corespunzatoare de pe conul herpolodic.
Aplicatii
1. Studiul cinematic al precesiei regulate. Un corp cu simetrie axiala se sprijina ınpunctul fix O si se roteste ın jurul axei proprii Oz cu viteza unghiulara constanta ϕ0. La randulsau, axa Oz efectueaza o miscare de rotatie ın jurul axei fixe verticale Oz1 cu viteza unghiularaconstanta ψ0, ea descriind un con cu deschiderea la varf 2θ0. Sa se gaseasca locul geometric alvectorului rotatie ω ın raport cu sistemul de referinta fix si ın raport cu cel solidar legat de rigid.
Rezolvare : Conform enuntului, dependenta de timp a unghiurilor Euler va fi exprimata deecuatiile :
ψ = ψ0t , θ = θ0 , ϕ = ϕ0t (1)
Proiectiile vectorului rotatie ω pe axele sistemului fix si pe axele sistemului legat solidar de rigidulcare se roteste, vor fi :
ωx1 = ϕ0 sin ψ0t sin θ0
ωy1 = − ϕ0 cos ψ0t sin θ0
ωz1 = ϕ0 cos θ0 + ψ0
;
ωx = ψ0 sin ϕ0t sin θ0
ωy = ψ0 cos ϕ0t sin θ0
ωz = ψ0 cos θ0 + ϕ0
(2)
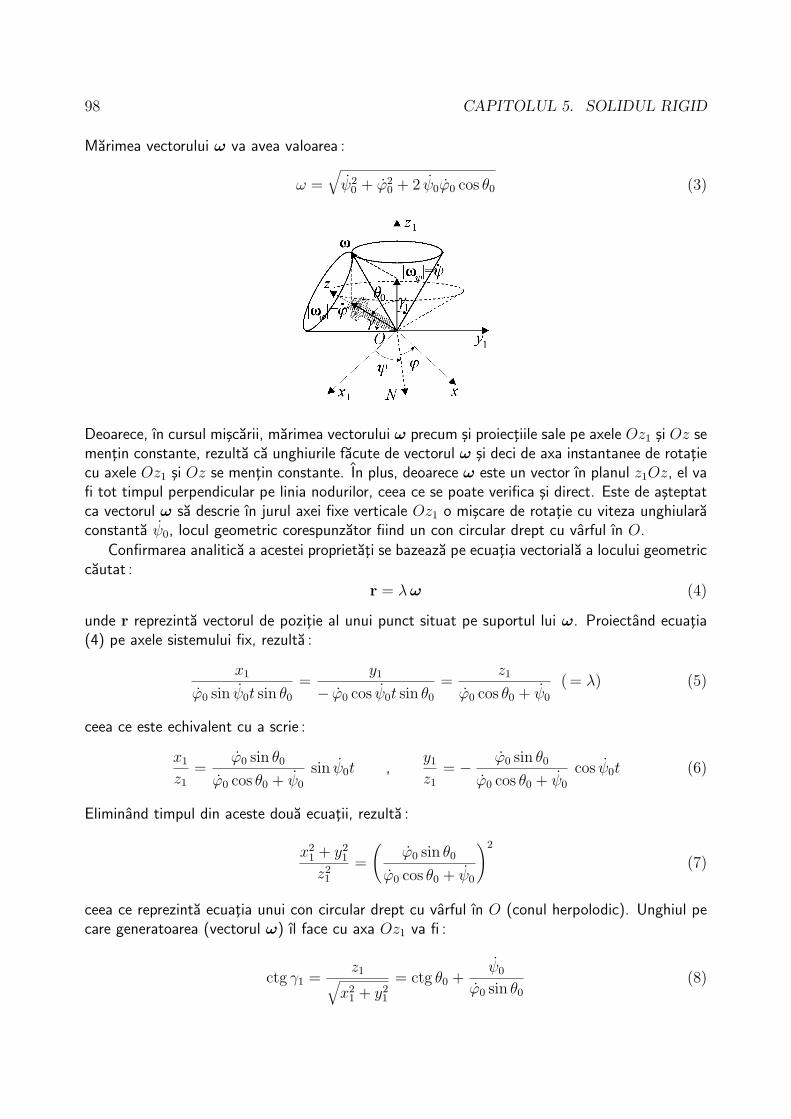
98 CAPITOLUL 5. SOLIDUL RIGID
Marimea vectorului ω va avea valoarea :
ω =√
ψ20 + ϕ2
0 + 2 ψ0ϕ0 cos θ0 (3)
Deoarece, ın cursul miscarii, marimea vectorului ω precum si proiectiile sale pe axele Oz1 si Oz sementin constante, rezulta ca unghiurile facute de vectorul ω si deci de axa instantanee de rotatiecu axele Oz1 si Oz se mentin constante. In plus, deoarece ω este un vector ın planul z1Oz, el vafi tot timpul perpendicular pe linia nodurilor, ceea ce se poate verifica si direct. Este de asteptatca vectorul ω sa descrie ın jurul axei fixe verticale Oz1 o miscare de rotatie cu viteza unghiularaconstanta ψ0, locul geometric corespunzator fiind un con circular drept cu varful ın O.
Confirmarea analitica a acestei proprietati se bazeaza pe ecuatia vectoriala a locului geometriccautat :
r = λ ω (4)
unde r reprezinta vectorul de pozitie al unui punct situat pe suportul lui ω. Proiectand ecuatia(4) pe axele sistemului fix, rezulta :
x1
ϕ0 sin ψ0t sin θ0
=y1
− ϕ0 cos ψ0t sin θ0
=z1
ϕ0 cos θ0 + ψ0
( = λ) (5)
ceea ce este echivalent cu a scrie :
x1
z1
=ϕ0 sin θ0
ϕ0 cos θ0 + ψ0
sin ψ0t ,y1
z1
= − ϕ0 sin θ0
ϕ0 cos θ0 + ψ0
cos ψ0t (6)
Eliminand timpul din aceste doua ecuatii, rezulta :
x21 + y2
1
z21
=
(ϕ0 sin θ0
ϕ0 cos θ0 + ψ0
)2
(7)
ceea ce reprezinta ecuatia unui con circular drept cu varful ın O (conul herpolodic). Unghiul pecare generatoarea (vectorul ω) ıl face cu axa Oz1 va fi :
ctg γ1 =z1√
x21 + y2
1
= ctg θ0 +ψ0
ϕ0 sin θ0
(8)

5.2. ELEMENTE DE CINEMATICA RIGIDULUI 99
Pentru a obtine ecuatia conului polodic, ecuatia (4) va fi proiectata pe axele sistemului mobil.Procedand analog, va rezulta :
x2 + y2
z2=
(ψ0 sin θ0
ψ0 cos θ0 + ϕ0
)2
(9)
ceea ce reprezinta de asemenea ecuatia unui con circular drept cu varful ın O, a carui generatoareface cu axa mobila Oz unghiul :
ctg γ =z√
x2 + y2= ctg θ0 +
ϕ0
ψ0 sin θ0
(10)
In cursul miscarii corpului, conul polodic se va rostogoli fara sa alunece pe conul herpolodic, axaconului polodic rotindu-se cu viteza unghiulara ψ0 ın jurul axei conului herpolodic, ψ0 reprezentandviteza precesiei.
5.2.3 Miscarea generala a rigidului
Daca rO 6= 0 si ω 6= 0, atunci tinand cont de observatia ca ın orice punct al rigiduluiproiectia vitezei sale v pe vectorul rotatie ω este aceeasi (v·ω este un invariant fundamental!),rezulta ca exista puncte P ′ ale caror viteze sunt minime. In punctele respective vitezele suntcoliniare cu ω, vectorii lor de pozitie fiind determinati de ecuatia generala :
vO + ω × r′ = λ ω (5.44)
Pentru a rezolva ecuatia ın raport cu r′, se ınmulteste (5.44) vectorial la stanga cu ω :
ω × vO + ω × (ω × r′) = 0 (5.45)
si atunci :
r′ =ω · r′ω2
ω +ω × vO
ω2(5.46)
Astfel locul geometric al punctelor ın care viteza este minima va fi o dreapta D paralela
la ω care trece prin punctul O′ de vector de pozitieω × vO
ω2masurat de la punctul O. Se
observa ca O′ este punctul de intersectie al planului normal la ω care trece prin O. Pentru acalcula viteza unui punct P ′ situat pe dreapta D, se ınmulteste (5.44) scalar cu ω. Rezulta
λ =ω · vO
ω2si ın consecinta :
v′ =ω · vO
ω2ω (5.47)
Viteza unui punct oarecare P al rigidului va fi astfel :
v = vO + ω × r = v′ + ω × (r− r′) = v′ + ω × d (5.48)
unde d este vectorul de pozitie al lui P ın raport cu punctul ın care planul, normal la ω si caretrece prin P , intersecteaza axa D. In consecinta viteza oricarui punct P are o componentav′ ın lungul axei D si o componenta de rotatie ω × d ın jurul acestei axe. Deoarece vectorii
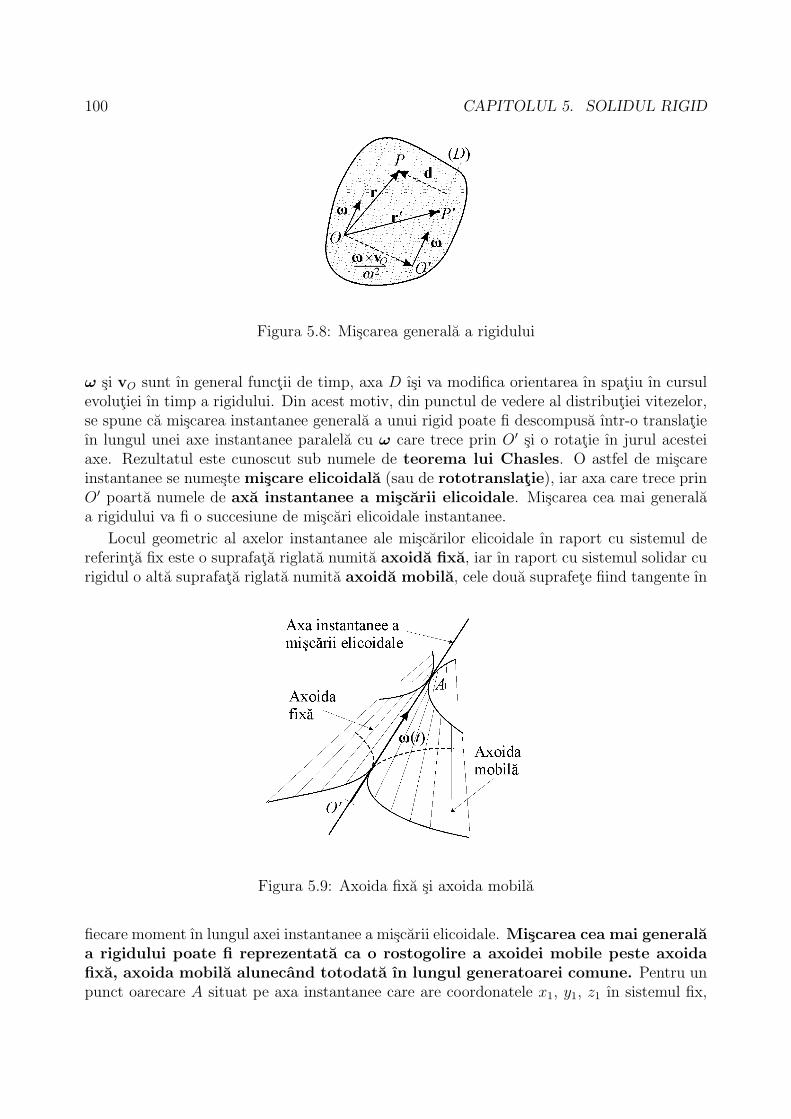
100 CAPITOLUL 5. SOLIDUL RIGID
Figura 5.8: Miscarea generala a rigidului
ω si vO sunt ın general functii de timp, axa D ısi va modifica orientarea ın spatiu ın cursulevolutiei ın timp a rigidului. Din acest motiv, din punctul de vedere al distributiei vitezelor,se spune ca miscarea instantanee generala a unui rigid poate fi descompusa ıntr-o translatieın lungul unei axe instantanee paralela cu ω care trece prin O′ si o rotatie ın jurul acesteiaxe. Rezultatul este cunoscut sub numele de teorema lui Chasles. O astfel de miscareinstantanee se numeste miscare elicoidala (sau de rototranslatie), iar axa care trece prinO′ poarta numele de axa instantanee a miscarii elicoidale. Miscarea cea mai generalaa rigidului va fi o succesiune de miscari elicoidale instantanee.
Locul geometric al axelor instantanee ale miscarilor elicoidale ın raport cu sistemul dereferinta fix este o suprafata riglata numita axoida fixa, iar ın raport cu sistemul solidar curigidul o alta suprafata riglata numita axoida mobila, cele doua suprafete fiind tangente ın
Figura 5.9: Axoida fixa si axoida mobila
fiecare moment ın lungul axei instantanee a miscarii elicoidale. Miscarea cea mai generalaa rigidului poate fi reprezentata ca o rostogolire a axoidei mobile peste axoidafixa, axoida mobila alunecand totodata ın lungul generatoarei comune. Pentru unpunct oarecare A situat pe axa instantanee care are coordonatele x1, y1, z1 ın sistemul fix,

5.3. MOMENTE DE INERTIE. CARACTERISTICI DINAMICE ALE RIGIDULUI 101
respectiv x, y, z ın sistemul mobil, se va putea scrie :
x1 i1 + y1 j1 + z1 k1 = rO + x i + y j + z k (5.49)
Derivand ambii membrii dupa timp si folosind formulele lui Poisson (5.33) rezulta :
x1 i1 + y1 j1 + z1 k1 = vO + ω × r + x i + y j + z k (5.50)
Deoarece vO + ω × r = λ ω, punctul A fiind ales pe axa instantanee, relatia (5.50) devine :
(x i + y j + z k)− (x1 i1 + y1 j1 + z1 k1) = −λω (5.51)
Rezulta ca viteza de deplasare a punctului A ın miscarea axei instantanee a miscarii elicoidalefata de sistemul de referinta mobil, difera fata de viteza de deplasare a punctului A ınmiscarea aceleiasi axe fata de triedrul fix. Axoida mobila aluneca fara frecare peste axoidafixa ın directia vectorului ω cu viteza −λω. In directia normala la vectorul ω nu are locnici o alunecare, componentele normale ale celor doua viteze fiind egale. De aceea cele douaaxoide trebuie sa fie tangente, axoida mobila rostogolindu-se fata de axoida fixa ın jurul axeiinstantanee a miscarii elicoidale si alunecand totodata ın lungul ei.
5.3 Momente de inertie. Caracteristici dinamice ale
rigidului
Considerand solidul rigid ca fiind alcatuit dintr-un numar suficient de mare de punctemateriale Pi , fiecare avand masa mi , prin definitie momentul de inertie al rigidului ınraport cu un punct, o dreapta, sau un plan , va fi exprimat prin suma :
I =∑
i
mid2i (5.52)
extinsa la toate punctele solidului, unde di reprezinta distantele de la punctele Pi la punctul,dreapta, sau planul respectiv.
Considerand un sistem de referinta cartezian Oxyz , conform definitiei (5.52) pot fi dis-tinse :
- momentul de inertie polar ın raport cu O :
IO =∑
i
mi(x2i + y2
i + z2i ) (5.53)
- momente de inertie axiale :
Ixx =∑
i
mi(y2i + z2
i ) , Iyy =∑
i
mi(z2i + x2
i ) , Izz =∑
i
mi(x2i + y2
i ) (5.54)
- momente de inertie planare :
IxOy =∑
i
miz2i , IyOz =
∑
i
mix2i , IzOx =
∑
i
miy2i (5.55)

102 CAPITOLUL 5. SOLIDUL RIGID
Pot fi stabilite usor o serie de relatii ıntre momentele de inertie definite mai sus :
Ixx = IzOx + IxOy , Iyy = IxOy + IyOz , Izz = IyOz + IzOx
IO = IyOz + IzOx + IxOy =1
2(Ixx + Iyy + Izz) (5.56)
IyOz =1
2(Iyy + Izz − Ixx) , IzOx =
1
2(Izz + Ixx − Iyy) , IxOy =
1
2(Ixx + Iyy − Izz)
Pe baza acestor relatii pot fi formulate urmatoarele proprietati : a. Suma momentelorplanare fata de doua plane perpendiculare este egala cu momentul axial fata de axa deter-minata de intersectia celor doua plane ; b. Suma momentelor planare fata de trei planecare formeaza un triedru drept este egala cu momentul polar fata de punctul determinatde intersectia planelor respective ; c. Suma momentelor axiale fata de trei drepte concu-rente reciproc perpendiculare este egala cu dublul momentului polar ın raport cu punctul deintersectie al dreptelor.
Daca ın particular corpul studiat are o simetrie axiala, momentul de inertie ın raport cuaxa respectiva va fi dublul momentului de inertie ın raport cu orice plan care contine axade simetrie. Daca corpul studiat se caracterizeaza printr-o simetrie sferica, momentul polarde inertie ın raport cu centrul de simetrie va fi egal cu de trei ori momentul de inertie ın
raport cu orice plan care trece prin centrul de simetrie, sau de3
2ori momentul de inertie ın
raport cu orice axa ce trece prin centrul respectiv. In cazul sferei omogene cu centrul ın O si
cu raza R, deoarece IO =3
5MR2, momentul de inertie ın raport cu un plan diametral este
1
5MR2, iar momentul de inertie ın raport cu un diametru oarecare este
2
5MR2.
Tot prin definitie momentele de inertie centrifugale (numite si produse de inertiesau momente de deviatie), vor fi date de expresiile :
Ixy = Iyx = −∑
i
mixiyi , Iyz = Izy = −∑
i
miyizi , Izx = Ixz = −∑
i
mizixi (5.57)
Se observa ca daca sistemul de referinta este ales astfel ıncat planele de coordonate sacoincida cu planele de simetrie materiale si geometrice ale corpului, atunci aceste expresii sesimplifica. Astfel, daca planul xOy este un plan de simetrie, atunci Iyz = Izx = 0 , deoarecedoua puncte simetrice de coordonate z si −z aduc aceeasi contributie la suma. Similar, dacaaxa Oz este o axa de simetrie, atunci de asemenea Iyz = Izx = 0 .
In cele ce urmeaza prezinta o importanta deosebita ın special momentele de inertie axialesi centrifugale, care folosind notatiile cunoscute pot fi scrise condensat ın forma :
Iαβ =∑
i
mi
3∑
γ=1
xiγx
iγ
δαβ − xi
αxiβ
; α, β = 1, 2, 3 (5.58)
unde xi1 = xi , xi
2 = yi , xi3 = zi .
5.3.1 Momentul de inertie al rigidului ın raport cu o axa
Considerand o axa D de versor u(ux, uy, uz) care trece prin O (v. Fig. 5.10) , distantade la un punct Pi al rigidului la axa D are marimea di = |ri×u| . Conform definitiei (5.52),

5.3. MOMENTE DE INERTIE. CARACTERISTICI DINAMICE ALE RIGIDULUI 103
Figura 5.10: Momentul de inertie ın raport cu axa D de versor u
momentul de inertie al rigidului ın raport cu axa de orientare u va fi :
Iu =∑
i
mid2i =
∑
i
mi(ri × u)(ri × u) (5.59)
Folosind proprietatea de permutare a termenilor produsului mixt : a · (b × c) = c · (a × b)se poate scrie ın continuare :
Iu =∑
i
miu · [ (ri × u)× ri ] = u ·∑i
mi [ ri × (u× ri) ] =3∑
α=1
uα
∑
i
mi [ ri × (u× ri) ]
α(5.60)
Componenta α a celui de al doilea vector, care este un dublu produs vectorial, se calculeazausor pornind de la proprietatea generala : a× (b× c) = (a · c)b− (a · b) c , rezultand :
∑
i
mi [ ri × (u× ri) ]
α
=∑
i
mi
3∑
γ=1
xiγx
iγ
uα −
3∑
β=1
xiβuβ
xi
α
(5.61)
=3∑
β=1
∑
i
mi
3∑
γ=1
xiγx
iγ
δαβ − xi
αxiβ
uβ =
3∑
β=1
Iαβuβ
unde s-a facut ınlocuirea uα =3∑
β=1
δαβuβ , s-a inversat ordinea de sumare si s-a tinut cont
de relatia (5.58). Expresia (5.60) a momentului de inertie al rigidului ın raport cu axa deorientare u devine :
Iu =3∑
α,β=1
Iαβuαuβ (5.62)
Momentul de inertie al rigidului ın raport cu axa D care trece prin O depinde de orientareadreptei D ın raport cu sistemul de referinta ales, deoarece componentele u1, u2, u3 nureprezinta altceva decat cosinusii directori ai axei D ın raport cu Ox1x2x3. Pe de altaparte Iu fiind un scalar, marimea sa nu se modifica la o rotatie a sistemului de axe :
3∑
α,β=1
Iαβuαuβ =3∑
µ,ν=1
I ′µνu′µu
′ν (5.63)

104 CAPITOLUL 5. SOLIDUL RIGID
Aici I ′µν reprezinta momentele de inertie axiale si centrifugale ın raport cu sistemul Ox′y′z′,
iar u′µ =3∑
α=1
aαµuα si u′ν =3∑
β=1
aβνuβ , transformarea fiind ortogonala. Facand ınlocuirile si
intervertind ordinea sumarilor ın (5.63), rezulta :
3∑
α,β=1
Iαβuαuβ =3∑
α,β=1
3∑
µ,ν=1
aαµaβνI′µν
uαuβ (5.64)
adica, la o transformare ortogonala, numerele Iαβ ; α, β = 1, 2, 3 se transforma dupa regula :
Iαβ =3∑
µ,ν=1
aαµaβνI′µν ; α, β = 1, 2, 3 (5.65)
ceea ce ınseamna ca ele alcatuiesc elementele unui tensor de ordinul doi ın spatiul euclidian :
τ =
I11 I12 I13
I21 I22 I23
I31 I32 I33
≡
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
(5.66)
numit tensorul momentelor de inertie . Deoarece :
Iαβ = Iβα ; α, β = 1, 2, 3 (5.67)
tensorul momentelor de inertie este simetric .
Se observa ca vectorul avand componentele (5.61) se poate scrie sub forma :
∑
i
mi [ ri × (u× ri) ] = (τu) (5.68)
unde ın membrul drept figureaza contractia unui tensor de ordinul trei, care este un tensorde ordinul ıntai, adica un vector.
In concluzie, avand ın vedere si (5.60), momentul de inertie al rigidului ın raport cu oaxa D avand orientarea u , care trece prin O , poate fi scris sub forma produsului scalar :
Iu = u (τu) (5.69)
Daca axa D reprezinta suportul vectorului rotatie, atunci ω = ω u , cele doua relatiiprecedente devenind : ∑
i
mi [ ri × (ω × ri) ] = (τω) (5.70)
respectiv :
Iω =1
ω2
∑
i
mi(ri × ω)2 =1
ω2ω (τω) (5.71)

5.3. MOMENTE DE INERTIE. CARACTERISTICI DINAMICE ALE RIGIDULUI 105
Teorema lui Steiner
In majoritatea aplicatiilor momentul de inertie poate fi calculat relativ usor, daca axade versor u trece prin centrul de masa al solidului rigid. Daca axa respectiva nu trece princentrul de masa, poate fi stabilita usor o relatie care leaga momentul de inertie ın raport cuo axa care trece prin centrul de masa, de momentul de inertie calculat ın raport cu o axaparalela care trece prin O (v. Fig. 5.11). Inlocuind ri = rc + r′i ın definitia (5.59), rezulta :
Iu =∑
i
mi(ri × u)2 =∑
i
mi [ (rc + r′i)× u ]2
=
=
(∑
i
mi
)(rc × u)2 +
∑
i
mi(r′i × u)2 + 2 (rc × u)
[(∑
i
mir′i
)× u
](5.72)
Deoarece∑
i
mir′i = 0 , expresia (5.72) devine :
Iu = M (rc × u)2 + I ′u unde I ′u =∑
i
mi(r′i × u)2 (5.73)
ceea ce reprezinta teorema lui Steiner : momentul de inertie al unui rigid ın raportcu o axa D , este egal cu momentul de inertie al rigidului ın raport cu o axa D ′
paralela la D care trece prin centrul de masa, la care se adauga momentul deinertie ın raport cu axa D calculat ın ipoteza ca ıntreaga masa a rigidului esteconcentrata ın centrul de masa .
Figura 5.11: Teorema lui Steiner
5.3.2 Elipsoidul de inertie
Pentru a examina situatia care apare atunci cand axa D , ın raport cu care se calculeazamomentul de inertie Iu , ia orice orientare posibila ın spatiu, se considera pe axa D un punctA avand vectorul de pozitie :
r =1√Iu
u (5.74)
Pentru a determina locul geometric al punctului A , atunci cand axa D ia toate orientarileposibile, se face ınlocuirea u =
√Iu r ın expresia Iu = u (τu) . Va rezulta ecuatia :
r (τr) = 1 adica3∑
α,β=1
Iαβxαxβ = 1 (5.75)

106 CAPITOLUL 5. SOLIDUL RIGID
ceea ce se scrie explicit sub forma :
Ixxx2 + Iyyy
2 + Izzz2 + 2Ixyxy + 2Iyzyz + 2Izxzx = 1 (5.76)
In consecinta, locul geometric cautat este o cuadrica cu centrul ın originea O a triedrului de
referinta. Marimea1√Iu
a razei vectoare a cuadricii este ıntotdeauna finita deoarece Iu > 0,
cu exceptia cazului cand rigidul se reduce la o portiune din axa D ınsasi. Lasand deoparteaceasta situatie, cuadrica (5.76) nu poseda puncte sitate la infinit si deci reprezinta un elipsoidcu centrul ın O . El va fi numit elipsoid de inertie al rigidului ın raport cu punctulO . Elipsoidul de inertie furnizeaza o imagine geometrica a variatiei momentului deinertie Iu fata de axele care trec prin O , deoarece modulul vectorului de pozitie aloricarui punct de pe elipsoid, va reprezenta inversul radicalului momentului de inertie ınraport cu axa care trece prin punctul respectiv.
Figura 5.12: Un rigid redus la o portiune de dreapta
In cazul particular al rigidului redus la o portiune a unei drepte care trece prin O, rezulta:
Iu =∑
i
mi(ri × u)2 = IO sin2 ϕ (5.77)
unde IO este momentul de inertie al rigidului fata de O, iar ϕ este unghiul facut de rigid,redus la o dreapta, cu axa D. Pozitia punctului A va fi determinat de coordonatele polare r,
ϕ din planul format de dreapta D si de solid, ıntre care exista relatia evidenta r sin ϕ =1√IO
.
In consecinta locul geometric al punctului A va fi un cilindru circular avand ca axa dreaptape care se afla rigidul considerat.
Facand abstractie de acest caz particular, locul geometric al punctului A este un elipsoidpropriu-zis. Cele trei axe ale elipsoidului poarta numele de axe principale de inertie .Conform ecuatiei (5.76), de obicei axele principale de inertie nu coincid cu axele de coor-donate, dar se stie ca poate fi realizata ıntotdeauna o rotatie ın spatiu, asa ıncat noile axeOξ , Oη , Oζ sa coincida cu axele principale de inertie. Intr-un astfel de sistem de referinta,forma patratica (5.76) este adusa la forma canonica :
Aξ2 + B η2 + C ζ2 = 1 (5.78)

5.3. MOMENTE DE INERTIE. CARACTERISTICI DINAMICE ALE RIGIDULUI 107
Se observa ca ın aceste conditii, tensorul momentelor de inertie se diagonalizeaza :
τ =
A 0 00 B 00 0 C
(5.79)
momentele de inertie centrifugale devenind nule. In expresiile (5.78) si (5.79) marimile A ,B si C reprezinta momentele de inertie ale rigidului ın raport cu axele principale de inertie,motiv pentru care ele sunt numite momente principale de inertie .
Marimile a , b si c ale semiaxelor principale ale elipsoidului de inertie sunt determinatede momentele principale de inertie, deoarece :
a =1√A
, b =1√B
, c =1√C
(5.80)
De aici rezulta ca daca a > b > c , atunci A < B < C si deci momentul principal de inertieal rigidului ın raport cu semiaxa mare a elipsoidului va avea valoarea cea mai mica, iarmomentul principal de inertie al rigidului ın raport cu semiaxa mica a elipsoidului va aveavaloarea cea mai mare.
Daca A 6= B = C , ecuatia (5.78) a elipsoidului de inertie devine :
Aξ2 + B (η2 + ζ2) = 1 (5.81)
ceea ce reprezinta un elipsoid de revolutie ın jurul axei principale Oξ . Daca A = B = C
elipsoidul de inertie se transforma ıntr-o sfera de raza1√A
.
Daca originea O a sistemului de referinta este aleasa astfel ıncat sa coincida cu centrul demasa al rigidului, atunci elipsiodul este numit elipsoid central de inertie , iar axele salevor fi numite axe principale centrale de inertie .
Printr-o alegere adecvata a orientarilor axelor sistemului de referinta, expresiile deduse ınparagraful anterior se simplifica considerabil. Astfel, notand cu ω(ωx, ωy, ωz) componentelevectorului rotatie ω ın raport cu triedrul determinat de axele principale de inertie, vectorul(τω) definit ın (5.70) va avea componentele (Aωx, B ωy, C ωz) , iar scalarul Iω · ω2 , unde Iω
este momentul de inertie (5.71) al rigidului ın raport cu o dreapta care constituie suportullui ω , devine :
Iω · ω2 = ω (τω) = A ω2x + B ω2
y + C ω2z (5.82)
5.3.3 Impulsul, momentul cinetic si energia cinetica
Pornind de la elementele prezentate ın paragrafele anterioare, pot fi calculate usor carac-teristicile dinamice ale rigidului.
Viteza unui punct Pi al rigidului fiind chiar viteza de transport definita la studiul miscariirelative :
vi = vO + ω × ri (5.83)
observand ca vectorii ω si vO sunt aceiasi ın toate punctele rigidului, pentru impulsulrigidului se gaseste expresia :
p =∑
i
mivi =∑
i
mi(vO+ω×ri) =
(∑
i
mi
)vO+ω×
(∑
i
miri
)= M vO+ω×M rc (5.84)

108 CAPITOLUL 5. SOLIDUL RIGID
adica :p = M (vO + ω × rc) (5.85)
Deoarece expresia din paranteza reprezinta chiar viteza centrului de masa, rezultatul (5.85)putea fi scris si direct, pe baza observatiei ca impulsul total al unui sistem de puncte materialecoincide cu impulsul centrului de masa, ın care se considera ca este concentrata ıntreaga masaa sistemului,
Procedand analog, pentru momentul cinetic al rigidului ın raport cu originea O1 a siste-mului fix rezulta expresia :
L1 =∑
i
(r1i ×mivi) =∑
i
[ (rO + ri)×mivi ] =
= rO ×(∑
i
mivi
)+
∑
i
[ ri ×mi(vO + ω × ri) ] =
= rO × p +
(∑
i
miri
)× vO +
∑
i
mi [ ri × (ω × ri) ] =
= rO × p + M rc × vO + (τω) (5.86)
Se remarca aparitia vectorului (τω) , unde τ este tensorul de inertie care contine momentelede inertie axiale si centrifugale ale rigidului ın raport cu sistemul de referinta legatsolidar de rigid . Deoarece acest termen se anuleaza cand ω = 0 , vectorul (τω) mai estenumit si moment cinetic de rotatie al rigidului.
Pentru energia cinetica a rigidului se obtine expresia :
T =1
2
∑
i
miv2i =
1
2
∑
i
mi(vO + ω × ri)(vO + ω × ri) =
=1
2
(∑
i
mi
)v2
O + vO
[ω ×
(∑
i
miri
)]+
1
2
∑
i
mi (ω × ri)2 =
=1
2M v2
O + M vO (ω × rc) +1
2ω (τω) =
=1
2M v2
O + M vO (ω × rc) +1
2Iω · ω2 (5.87)
Primul termen se datoreaza exclusiv miscarii de translatie a rigidului, ultimul termen estedatorat exclusiv miscarii sale de rotatie, el reprezentand energia cinetica de rotatie , iartermenul al doilea este legat de ambele tipuri de miscari.
Expresiile obtinute se simplifica considerabil ın o serie de cazuri particulare. Astfel,daca originea sistemului mobil este aleasa ın centrul de masa al rigidului (rc = 0) ,atunci :
p = M vO ; L1 = rO × p + (τω) ; T =1
2M v2
O +1
2ω (τω) (5.88)
Deoarece rigidul este asimilat cu un sistem discret de puncte materiale, aceste rezultateputeau fi scrise si direct. Se observa ca ultimele doua relatii exprima cele doua teoreme alelui Koenig.
Daca este studiata miscarea unui rigid cu punct fix , alegand originile O1 si O ale celordoua sisteme de coordonate astfel ıncat ele sa coincida cu punctul fix, atunci rO = 0 ; vO = 0

5.4. DINAMICA SOLIDULUI RIGID 109
si expresiile generale devin :
p = M ω × rc ; L = (τω) ; T =1
2ω (τω) =
1
2ω · L (5.89)
Este evident ca atat momentul cinetic ın raport cu punctul fix, cat si energia cinetica arigidului, se datoresc exclusiv miscarii sale de rotatie.
In fine, daca orientarile axelor sistemului mobil sunt alese astfel ıncat ele sa coincidacu axele principale ale elipsoidului de inertie, tensorul de inertie va avea forma diagonala,coordonatele vectorului (τω) si scalarul ω (τω) capatand expresiile simple prezentate ınparagraful anterior.
5.4 Dinamica solidului rigid
5.4.1 Ecuatiile de miscare ale rigidului
Deoarece rigidul liber are sase grade de libertate, pentru a descrie miscarea acestuiasunt necesare sase ecuatii scalare, avand drept necunoscute cei sase parametri independenticu ajutorul carora este precizata pozitia rigidului la un moment dat. Aceste ecuatii pot fiobtinute pornind de la teoremele generale enuntate pentru sisteme de puncte materiale, ıncare pentru caracteristicile dinamice ale rigidului sunt folosite expresiile deduse ın sectiuneaanterioara.
Pentru a scrie teorema impulsului , derivand dupa timp expresia p = M (vO +ω×rc) ,rezulta :
M (aO + ω × rc + ω × rc) = F (5.90)
unde F este rezultanta fortelor exterioare aplicate rigidului. Deoarece derivata dupa timp aunui vector de pozitie ın sistemul solidar de rigid este r = ω × r , viteza relativa fiind nula,ecuatia (5.90) devine :
M [ aO + ω × rc + ω × (ω × rc) ] = F (5.91)
Procedand analog pentru teorema momentului cinetic , deoarece ın raport cu sistemulfix se stie ca L1 = rO × p + M rc × vO + (τω) , prin derivare dupa timp rezulta :
rO × p + vO × p + M rc × vO + M rc × aO +d
dt(τω) = MO1
(F) (5.92)
unde MO1(F) este momentul rezultant ın O1 al fortelor exterioare. Se observa ca :
vO × p + M rc × vO = vO ×M (vO + ω × rc) + M (ω × rc)× vO = 0 (5.93)
sid
dt(τω) =
d′
dt(τω) + ω × (τω) = (τ ω) + ω × (τω) (5.94)
deoarece elementele tensorului τ sunt niste constante ın sistemul de referinta solidar cu
rigidul, iard′ωdt
=dω
dt. Folosind aceste rezultate, (5.92) devine :
rO × p + M rc × aO + (τ ω) + ω × (τω) = MO1(F) (5.95)

110 CAPITOLUL 5. SOLIDUL RIGID
Ecuatia se simplifica si mai mult daca se tine cont de faptul ca :
MO1(F) =
∑
i
[ (rO + ri)× Fi ] = rO × F +∑
i
(ri × Fi) = rO × p + MO(F ) (5.96)
unde s-a folosit teorema impulsului, iar MO(F) este momentul rezultant ın originea sistemuluisolidar legat a rigid al fortelor exterioare. Egaland ultimele doua ecuatii, rezulta :
M rc × aO + (τ ω) + ω × (τω) = MO(F) (5.97)
Deoarece fortele aplicate asupra rigidului sunt date, ecuatiile (5.91) si (5.97) sunt sufici-ente pentru determinarea functiilor necunoscute rO(t) si ω(t) , motiv pentru care ele suntcunoscute si sub numele de ecuatiile de miscare ale rigidului liber.
Folosind ecuatiile (5.91) si (5.97) poate fi obtinuta teorema energiei pentru solidul rigidliber. In acest scop se deriveaza dupa timp expresia (5.87) pentru energia cinetica :
dT
dt= M vOaO +M aO(ω×rc)+M vO(ω×rc)+M vO[ω× (ω×rc)]+
1
2
d
dt[ω (τω)] (5.98)
Folosind (5.94) rezulta ın continuare :
d
dt[ω (τω)] = ω (τω) + ω
d
dt(τω) = ω (τω) + ω (τ ω) + ω [ ω × (τω)]︸ ︷︷ ︸
0
= 2 ω (τ ω) (5.99)
unde s-a utilizat egalitatea evidenta ω (τω) = ω (τ ω) care se datoreste faptului ca expresiaω (τω) este o forma patratica. Grupand termenii, relatia (5.98) devine :
dT
dt= M [ aO + ω × rc + ω × (ω × rc) ]vO + [M rc × aO + (τ ω) + ω × (τω)] ω =
= FvO + MO ω =
(∑
i
Fi
)vO +
(∑
i
ri × Fi
)ω =
∑
i
Fi (vO + ω × ri) =
=∑
i
Fi vi =∑
i
Fidri
dt(5.100)
de unde rezulta ın final :
dT = dLext (5.101)
Rezultatul este cel asteptat, deoarece se stie ca ın cazul solidului rigid lucrul mecanic alfortelor interioare este zero : dLint = 0 . Daca si dLext = 0 (cazul rigidului greu fixat ıncentrul de masa) din (5.101) rezulta o integrala prima a miscarii.
Alegand ın mod adecvat sistemul de referinta solidar legat de rigid, ecuatiile de miscareale rigidului liber (5.91) si (5.97) capata forme mult mai simple. Astfel, alegand origineasistemului mobil ın centrul de masa al rigidului (rc = 0), ecuatia (5.91) se reduce la :
M aO = F (5.102)

5.4. DINAMICA SOLIDULUI RIGID 111
Daca ın plus axele sistemului mobil coincid cu axele principale ale elipsoidului deinertie al rigidului , proiectand ecuatia (5.97) pe axele sistemului mobil si folosind notatiilecunoscute, se obtine :
A ωx + (C −B) ωyωz = (MO)x
B ωy + (A− C) ωzωx = (MO)y (5.103)
C ωz + (B − A) ωxωy = (MO)z
deoarece :
ω × (τω) =
∣∣∣∣∣∣∣
i j kωx ωy ωz
Aωx B ωy C ωz
∣∣∣∣∣∣∣(5.104)
In aceste ecuatii, aO este acceleratia centrului de masa al rigidului ın raport cu sistemul fix,iar MO este momentul rezultant al fortelor exterioare ın raport cu centrul de masa.
Daca fortele exterioare sunt date, ecuatia (5.102) determinaa miscarea centrului de masaal rigidului. Se observa ca aceasta coincide cu ecuatia lui Newton scrisa pentru centrulmaselor, ın care ar fi concentrata ıntreaga masa a rigidului si ın care ar fi aplicata rezultantafortelor exterioare. Aceasta ınseamna ca atunci cand ın diverse probleme de miscare rigiduleste asimilat cu un punct material, iar pentru determinarea miscarii este folosita ecuatia luiNewton, ın realitate este studiata doar miscare centrului de masa al rigidului.
Sistemul neliniar de ecuatii diferentiale de ordinul ıntai scris ın forma normala (5.103),permite determinarea functiilor ωx(t) , ωy(t) , ωz(t) daca sunt cunoscute valorile acestora lamomentul initial. Odata integrat acest sistem de ecuatii (ın cazurile ın care acest lucru esteposibil), pentru determinarea pozitiei rigidului, deci pentru determinarea unghiurilor Eulerψ(t) , θ(t) si ϕ(t) , va mai trebui integrat sistemul neliniar de ecuatii diferentiale de ordinulıntai scris sub forma normala (5.27). Este de asteptat ca doar ın cateva cazuri cu totulparticulare, sa fie posibila integrarea succesiva a celor doua sisteme de ecuatii diferentialeneliniare.
Rigidul liber ın camp gravitational omogen
Daca asupra punctelor materiale care alcatuiesc rigidul liber actioneaza doar forta degreutate, atunci :
F =∑
i
mig = M g ; MO =∑
i
(ri ×mig) =
(∑
i
miri
)× g = M rc × g = 0 (5.105)
Ecuatiile (5.102) si (5.103) se reduc la :
aO = g (5.106)
si
A ωx + (C −B) ωyωz = 0
B ωy + (A− C) ωzωx = 0 (5.107)
C ωz + (B − A) ωxωy = 0

112 CAPITOLUL 5. SOLIDUL RIGID
Conform ecuatiei (5.106), centrul de masa al rigidului se deplaseaza ca un punct materialgreu care, ın functie de conditiile initiale, poate descrie ın vid o traiectorie verticala sauparabolica. Pentru determinarea miscarii de rotatie a rigidului ın jurul centrului sau demasa, va trebui integrat sistemul (5.107). Solutia acestui sistem, ın cateva cazuri particulare,a fost data pentru prima data de Euler , sistemul fiind acelasi cu cel scris cand este studiatamiscarea rigidului cu punct fix.
In ıncheierea acestor consideratii generale privind ecuatiile de miscare ale rigidului liberse impune o observatie importanta. Daca fortele aplicate rigidului satisfac conditiile deexistenta si unicitate ale solutiei, atunci sistemele de ecuatii care determina miscarea admito solutie unica. De aici rezulta ca daca doua sisteme de forte aplicate aceluiasi rigid au aceeasirezultanta si acelasi moment rezultant ın raport cu o origine data (au acelasi torsor), elevor produce acelasi efect. In particular, sistemul fortelor de greutate care actioneaza asuprapunctelor ce alcatuiesc rigidul poate fi ınlocuit cu o forta unica, egala cu greutatea rigidului,care are punctul de aplicatie ın centrul de masa.
Conditiile de echilibru ale rigidului liber
Daca la un timp dat t0 pozitia rigidului liber este data de parametrii r0O, ψ0, θ0, ϕ0 si
viteza sa este nula, iar la un timp t > t0 pozitia sa ramane aceeasi, se spune ca rigidul segaseste ın stare de echilibru. Deoarece solutia :
rO(t) = r0O ;
ψ(t) = ψ0
θ(t) = θ0
ϕ(t) = ϕ0
deci ω(t) = 0 (5.108)
verifica ecuatiile de miscare (5.91) si (5.97) ın care F si MO sunt presupuse ca functii cu-noscute de t, rO, vO, ψ, θ, ϕ, ψ, θ, ϕ, rezulta ca va trebui ın mod necesar ca ın pozitia deechilibru sa fie indeplinite conditiile :
F(t, r0O, ψ0, θ0, ϕ0, 0, . . .) = 0 ; M(t, r0
O, ψ0, θ0, ϕ0, 0, . . .) = 0 (5.109)
unde F este rezultanta fortelor exterioare care actioneaza asupra rigidului, iar M reprezintamomentul rezultant al fortelor respective ın raport cu o origine aleasa arbitrar. Evident, asacum rezulta si din (5.108), ın ecuatiile (5.109) coordonatele vitezei vO, ψ, θ, ϕ vor fi nule.
Reciproc, daca ıntr-o pozitie oarecare a rigidului sunt ındeplinite ecuatiile (5.109) siviteza sa este nula, atunci ın baza teoremei de unicitate aceste ecuatii admit solutia unica(5.108). Astfel, conditia necesara si suficienta ca pozitia definita de r0
O, ψ0, θ0, ϕ0 safie o pozitie de echilibru a rigidului liber este ca ın acea pozitie, coodonatele vitezei fiindnule, sa fie ındeplinite ecuatiile F = 0 si M = 0. Proiectand aceste ecuatii pe axele unuisistem de referinta, rezulta sase ecuatii pentru cele sase necunoscute si astfel problema poatefi rezolvata complet.
Ecuatiile de miscare ale rigidului cu legaturi
Daca rigidului ıi sunt impuse anumite legaturi, altele decat cele de rigiditate, atunciın ecuatiile de miscare vor trebui sa intervina reactiunile acestora. Teorema impulsului si

5.4. DINAMICA SOLIDULUI RIGID 113
teorema momentului cinetic vor conduce la ecuatiile :
M [ aO + ω × rc + ω × (ω × rc) ] = F + R (5.110)
si
M rc × aO + (τ ω) + ω × (τω) = MO(F) + MO(R) (5.111)
unde R reprezinta rezultanta reactiunilor legaturilor exterioare, iar MO(R) este momentulrezultant ın originea sistemului solidar legat de rigid al reactiunilor legaturilor exterioare.Desi numarul gradelor de libertate scade, totusi numarul necunoscutelor problemei este mare,reactiunile legaturilor fiind marimi apriori necunoscute care trebuie determinate, daca estenecesar si posibil.
Aplicatii
1. Sa se determine ecuatia de miscare a centrului unui disc circular omogen de raza a si masaM , care se rostogoleste fara alunecare pe un plan ınclinat care face unghiul α cu orizontala.
Rezolvare : Sistemul de referinta fix se alege astfel ıncat axa O1x1 sa fie ın lungul planuluiınclinat si deci sa faca unghiul α cu orizontala, axa O1y1 sa fie continuta ın planul respectiv, iaraxa O1z1 sa fie perpendiculara pe acest plan. Sistemul mobil are originea ın centrul discului, iaraxele mobile Ox si Oy sunt continute ın planul discului. Din motive de simetrie rc = 0 si atunciteorema impulsului se reduce la :
MaO = F + Rt + Rn (1)
unde F = Mg, iar reactiunea legaturii (discul se rostogoleste fara sa alunece!) este descopusaın doua componente, una tangentiala Rt si una normala Rn la planul ınclinat. Proiectia pe axaO1x1 conduce la ecuatia :
MxO = Mg sin α−Rt (2)
Avand ın vedere figura, teorema momentului cinetic
(τ ω) + ω × (τω) = MO(F) + MO(Rt) + MO(Rn) (3)
se reduce la :
(τ ω) + ω × (τω) = rP ×Rt (4)

114 CAPITOLUL 5. SOLIDUL RIGID
In raport cu sistemul de referinta solidar legat de disc, tensorul de inertie are elementele :
τ =
1
2I 0 0
01
2I 0
0 0 I
(5)
unde :
I = Izz =∫
(x2 + y2) dm = 2πρ
a∫
0
r3dr = 2πM
πa2
a4
4=
1
2Ma2 (6)
Observand ca ın sistemul de referinta mobil :
ω =
0
0
− ϕ
, (τω) =
0
0
− Iϕ
deci ω × (τω) = 0 (7)
deoarece axa Oz este antiparalela cu axa O1y1, proiectand ecuatia (4) pe axa O1y1 va rezultaegalitatea :
Iϕ = aRt (8)
si deci :
Rt =I
aϕ =
1
2Maϕ (9)
Ecuatia legaturii rezulta din conditia ca viteza absoluta a punctului de contact P sa fie nula :
xO − aϕ = 0 (10)
Introducand aceste rezultate ın ecuatia (2) :
MxO = Mg sin α− 1
2MxO (11)
rezulta expresia acceleratiei centrului discului :
xO =2
3g sin α (12)
Daca la momentul initial t0 = 0 punctul O se gaseste ın repaus pe axa O1z1, atunci ecuatia demiscare cautata este :
xO(t) =1
3g sin α · t2 (13)
2. Sa se studieze miscarea unei sfere omogene de raza a care se poate rostogoli ın plan verticalfara sa alunece ın interiorul unui cilindru circular gol de raza A > a, fixat ın pozitie orizontala.
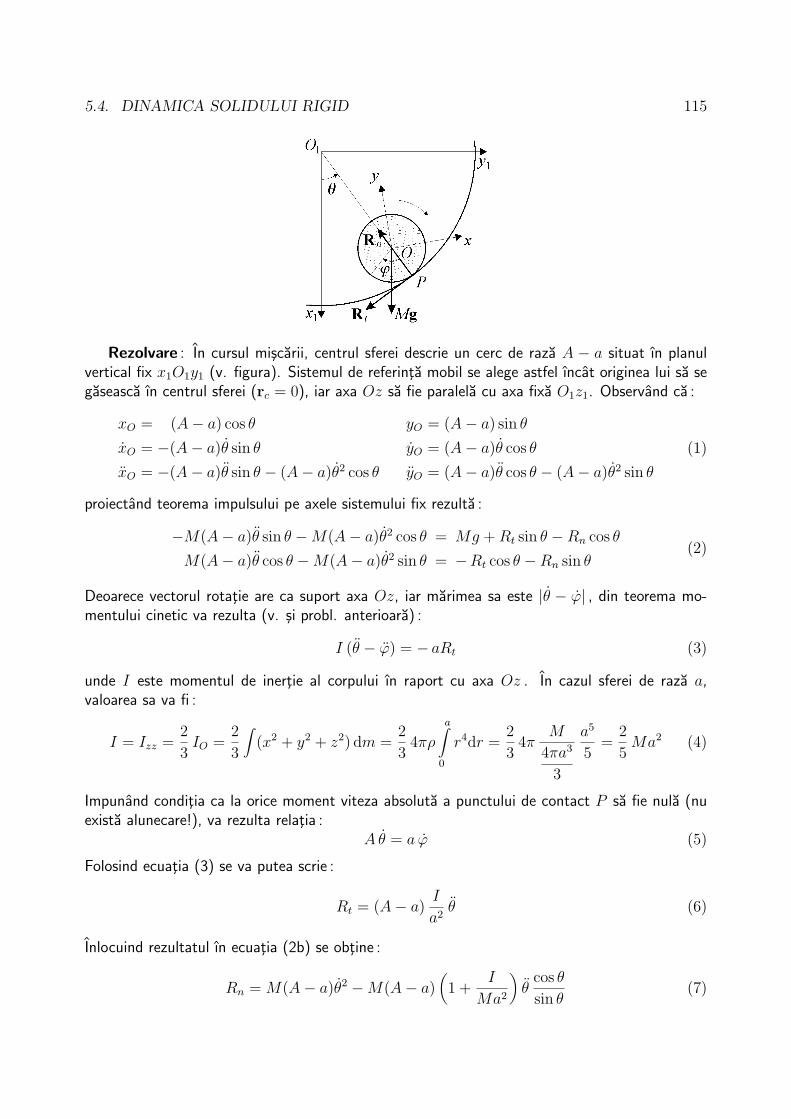
5.4. DINAMICA SOLIDULUI RIGID 115
Rezolvare : In cursul miscarii, centrul sferei descrie un cerc de raza A − a situat ın planulvertical fix x1O1y1 (v. figura). Sistemul de referinta mobil se alege astfel ıncat originea lui sa segaseasca ın centrul sferei (rc = 0), iar axa Oz sa fie paralela cu axa fixa O1z1. Observand ca :
xO = (A− a) cos θ yO = (A− a) sin θ
xO = −(A− a)θ sin θ yO = (A− a)θ cos θ
xO = −(A− a)θ sin θ − (A− a)θ2 cos θ yO = (A− a)θ cos θ − (A− a)θ2 sin θ
(1)
proiectand teorema impulsului pe axele sistemului fix rezulta :
−M(A− a)θ sin θ −M(A− a)θ2 cos θ = Mg + Rt sin θ −Rn cos θ
M(A− a)θ cos θ −M(A− a)θ2 sin θ = −Rt cos θ −Rn sin θ(2)
Deoarece vectorul rotatie are ca suport axa Oz, iar marimea sa este |θ − ϕ| , din teorema mo-mentului cinetic va rezulta (v. si probl. anterioara) :
I (θ − ϕ) = − aRt (3)
unde I este momentul de inertie al corpului ın raport cu axa Oz . In cazul sferei de raza a,valoarea sa va fi :
I = Izz =2
3IO =
2
3
∫(x2 + y2 + z2) dm =
2
34πρ
a∫
0
r4dr =2
34π
M
4πa3
3
a5
5=
2
5Ma2 (4)
Impunand conditia ca la orice moment viteza absoluta a punctului de contact P sa fie nula (nuexista alunecare!), va rezulta relatia :
A θ = a ϕ (5)
Folosind ecuatia (3) se va putea scrie :
Rt = (A− a)I
a2θ (6)
Inlocuind rezultatul ın ecuatia (2b) se obtine :
Rn = M(A− a)θ2 −M(A− a)(1 +
I
Ma2
)θ
cos θ
sin θ(7)

116 CAPITOLUL 5. SOLIDUL RIGID
Introducand expresiile lui Rt si Rn ın (2a), va rezulta ecuatia de miscare a punctului O :
θ +g
(A− a)(1 +
I
Ma2
) sin θ = 0 (8)
Se observa ca ecuatia obtinuta coincide ca forma cu ecuatia pendulului matematic a carui lungimear fi :
l′ = (A− a)(1 +
I
Ma2
)(9)
Tinand seama de expresia (4) a momentului de inertie ın raport cu axa Oz pentru sfera, se obtinevaloarea :
l′ =7
5(A− a) (10)
3. Sa se studieze miscarea unei bare omogene grele de lungime l si grosime neglijabila, alecarei extremitati aluneca ın plan vertical, sub influenta greutatii, pe doi pereti perpendiculari ıntreei. Se va considera coeficientul de frecare : a) µ = 1 , b) µ = 0 .
Rezolvare : Alegand sistemele de referinta fix si mobil ca ın figura, se observa ca originea O
(care coincide cu mijlocul barei) descrie un cerc de razal
2. Coordonatele lui O vor fi :
xO =l
2cos θ ; yO =
l
2sin θ (1)
de unde rezulta componentele acceleratiei ın sistemul de referinta fix :
xO = − l
2
(θ sin θ + θ2 cos θ
); yO =
l
2
(θ cos θ − θ2 sin θ
)(2)
Din teorema impulsului vor rezulta ecuatiile :
−Ml
2
(θ sin θ + θ2 cos θ
)= R2n −R1t = R2n − µR1n
Ml
2
(θ cos θ − θ2 sin θ
)= −Mg + R1n + R2t = −Mg + R1n + µR2n
(3)

5.4. DINAMICA SOLIDULUI RIGID 117
Vectorul rotatie ω se calculeaza pornind de la expresiile :
i = cos θ i1 − sin θ j1
j = sin θ i1 + cos θ j1(4)
si aplicand definitia :
ωz =di
dt· j = − θ (5)
Tinand cont ca IO =1
12Ml2, din teorema momentului cinetic va rezulta ecuatia :
−Ml2
12θ = − l
2(R1t + R2n) sin θ − l
2(R2t −R1n) cos θ =
= − l
2(µR1n + R2n) sin θ − l
2(µR2n −R1n) cos θ
(6)
a) Cazul µ = 1. Inlocuind ın (6) ecuatiile (3) va rezulta ın final :
θ + 3 θ2 − 6g
lsin θ = 0 (7)
Obervand ca se poate scrie :
θ =dθ
dt= θ
dθ
dθ=
1
2
dθ2
dθ(8)
ecuatia (7) devine :dθ2
dθ+ 6 θ2 =
12g
lsin θ (9)
si are solutia generala :
θ2 = C e−6θ +12g
37l(6 sin θ − cos θ) (10)
unde constanta C urmeaza sa fie determinata din conditiile initiale.
Examinand ecuatia (9) se observa ca daca θ20 −
2g
lsin θ0 < 0 , atunci θ2 este o functie
crescatoare si bara va aluneca cu viteza din ce ın ce mai mare pana ajunge ın pozitie orizon-
tala. Daca ınsa θ20 −
2g
lsin θ0 > 0 , atunci θ2 descreste si exista o valoare limita a unghiului θ
pentru care bara se opreste ıntr-o pozitie oblica.b) Cazul µ = 0. Facand aceleasi ınlocuiri, va rezulta ecuatia diferentiala :
θ +3g
2lcos θ = 0 (11)
Cu schimbarea ϕ =π
2+ θ , ecuatia (11) descrie miscarea unui pendul matematic cu lungimea
l′ =2l
3care face unghiul ϕ cu verticala descendenta. Trecand la variabila independenta θ , se
obtine ecuatia :dθ2
dθ+
3g
lcos θ = 0 (12)

118 CAPITOLUL 5. SOLIDUL RIGID
care are solutia (θ = 0 pentru θ =π
2) :
θ2 =3g
2(1− sin θ) (13)
Functia θ este monoton crescatoare si atinge valoarea maxima pentru θ = 0 .
5.4.2 Miscarea rigidului cu axa fixa
Rigidul are doua puncte O si O′ imobilizate ın raport cu sistemul fix, distanta ıntre elefiind h . Axa care trece prin O si O′ fiind fixa, unica posibilitate de miscare a rigidului vafi cea de rotatie ın jurul acestei axe. Se alege punctul O ca origine comuna a celor douasisteme de coordonate, fix si solidar legat de rigidul care se misca, si pentru simplitate seconsidera ca axele Oz1 si Oz coincid cu axa OO′ . Pozitia rigidului la un moment dat t va fideterminata de unghiul θ format de planele x1Oz1 si xOz (v. Fig. 5.13).
Figura 5.13: Rigidul cu axa fixa
Rigidul avand un singur grad de libertate, miscarea sa va fi descrisa de legea θ = θ(t) .Vectorul rotatie ω si vectorul ω vor avea componente numai dupa axa Oz, marimile lor fiindθ si θ :
ω = ω (0, 0, ω) , ω = θ
ω = ω (0, 0, ω) , ω = θ(5.112)
Imobilizarea punctelor O si O′ se traduce prin aparitia a doua reactiuni R si R′ care suntapriori necunoscute. Cunoscand fortele aplicate asupra rigidului, se cere sa se de-termine miscarea sa, precum si reactiunile. Ecuatiile de miscare sunt asemanatoare cucele deduse ın paragraful anterior, cu deosebirea ca acum intervin explicit cele doua reactiuniR si R′ :
M [ aO + ω × rc + ω × (ω × rc) ] = F + R + R′ (5.113)
respectiv :
M rc × aO + (τ ω) + ω × (τω) = MO(F) + MO(R) + MO(R′) (5.114)

5.4. DINAMICA SOLIDULUI RIGID 119
Tinand cont de (5.112) si observand ca aO = 0 , ω × (ω × rc) = (ω · rc) ω − ω2 rc ,
(τω) =
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
0
0
ω
=
Ixz ω
Iyz ω
Izz ω
, ω × (τω) =
∣∣∣∣∣∣∣∣
i j k
0 0 ω
Ixzω Iyzω Izzω
∣∣∣∣∣∣∣∣(5.115)
si
MO(R) = 0 , MO(R′) =
∣∣∣∣∣∣∣∣
i j k
0 0 h
R′x R′
y R′z
∣∣∣∣∣∣∣∣(5.116)
din (5.112) si (5.113) rezulta sistemul de ecuatii scalare :
−M (xc ω2 + yc ω) = Fx + Rx + R′x
−M (yc ω2 − xc ω) = Fy + Ry + R′y
0 = Fz + Rz + R′z
− Iyz ω2 + Ixz ω = Mx − hR′y
Ixz ω2 + Iyz ω = My + hR′x
Izz ω = Mz
(5.117)
Fiind cunoscute fortele aplicate rigidului, deoarece ultima ecuatie din sistemul (5.117)nu contine reactiunile, prin integrarea de doua ori a acestei ecuatii, ar putea fi determinatafunctia θ = θ(t) . Odata cunoscuta aceasta functie, din ecuatiile a patra si a cincea sepot determina componentele R′
x si R′y , iar apoi din prima si a doua ecuatie componentele
Rx si Ry ale reactiunilor. Cea de a treia ecuatie din (5.117) permite doar determinareasumei Rz + R′
z . Faptul ca componentele Rz si R′z nu pot fi determinate individual, se
datoreste ipotezei facute asupra rigiditatii segmentului OO′ . Cele doua componente ramannedeterminate , deoarece prin adaugarea ın O , respectiv ın O′ , a doua forte egale si desens opus ın lungul segmentului OO′ , cele doua componente se modifica, ın schimb ramannemodificate Rx , Ry , R′
x , R′y , Rz + R′
z , nefiind astfel modificata nici miscarea rigidului.Nedeterminarea poate fi ridicata doar prin renuntarea la ipoteza de rigiditate.
Se observa ca reactiunile R si R′ depind de vectorul de rotatie ω si este de asteptat cala viteze de rotatie foarte mari, fortele necesare pentru fixarea axei sa fie mari. In plus,solicitarea axei de rotatie din partea corpului va fi foarte mare si axa se poate rupe. Dinecuatiile (5.117) rezulta ca reactiunile nu vor depinde de viteza de rotatie a rigidului, dacaindiferent de ω 6= 0 si ω 6= 0 , sunt ındeplinite simultan ecuatiile :
ω2xc + ω yc = 0
− ω xc + ω2yc = 0;
−ω2Iyz + ω Ixz = 0
ω Iyz + ω2Ixz = 0(5.118)
Deoarece determinantul acestor sisteme este ∆ = ω4 + ω2 > 0 , solutiile la care verifica(5.118) vor fi :
xc = yc = 0 si Ixz = Iyz = 0 (5.119)
Prima conditie spune ca axa de rotatie trebuie sa treaca prin centrul de masa, iar conformcelei de a doua conditii, axa Oz trebuie sa fie axa principala de inertie. Deci, daca axa

120 CAPITOLUL 5. SOLIDUL RIGID
de rotatie a rigidului este axa principala centrala de inertie, reactiunile ei nudepind de viteza de rotatie . Rezultatul obtinut prezinta importanta deosebita ın tehnicala montarea turbinelor, elicelor, etc.
Se poate pune de asemenea problema de a gasi conditiile ın care este suficient un singurpunct fix, pentru a asigura imobilitatea ıntregii axe OO′ , indiferent de valoarea lui ω . Inacest caz, axa OO′ va purta numele de axa permanenta de rotatie . Din ultimele treiecuatii (5.117) rezulta ca ın vederea realizarii acestui scop (R′ = 0), va trebui ca simultan :
Ixz = Iyz = 0 si Mx = My = 0 (5.120)
Aceste conditii sunt suficiente, deoarece datorita nedeterminarii remarcate anterior, R′z poate
fi ınglobata in Rz . Rezulta ca OO′ este o axa permanenta de rotatie, daca ea esteo axa principala de inertie care trece prin O , iar momentul rezultant al fortelorefectiv aplicate rigidului este orientat ın lungul axei respective . Situatia se reali-zeaza daca, ın particular, asupra rigidului actioneaza o forta unica ın planul xOy , iar axade rotatie Oz este axa principala de inertie a rigidului relativa la punctul O (pendulul fizic).
Se observa ca si reactiunea ın O se anuleaza (R = 0), daca ın plus sunt ındepliniteconditiile :
xc = yc = 0 si Fx = Fy = Fz = 0 (5.121)
Daca conditiile (5.120) si (5.121) sunt simultan satisfacute, axa de rotatie nu are nevoiede nici un punct de sprijin. O astfel de axa poarta numele de axa libera (spontana) derotatie si se observa ca ın mod necesar ea trebuie sa fie o axa principala centrala de inertie.
Aplicatii
1. Pendulul fizic. Un rigid greu de masa M se poate roti liber ın jurul unei axe orizontalefixe care este ın acelasi timp si axa principala de inertie. Sa se studieze miscarea rigidului sivariatia reactiunii.
Rezolvare : Sistemul de referinta fix se alege astfel ıncat axa Ox1 sa fie orientata pe verticalaın jos, iar axa Oz1 sa fie orizontala. Axa Oz coincide cu axa Oz1, iar axa mobila Ox trece princentrul de masa C al corpului, distanta OC fiind notata cu l. Pozitia la un moment dat arigidului ın raport cu sistemul fix va fi precizata de valoarea unghiului θ(t) dintre axele Ox1 siOx . Momentul greutatii va fi astfel :
MO(G) =
∣∣∣∣∣∣∣
i1 j1 k1
l cos θ l sin θ 0Mg 0 0
∣∣∣∣∣∣∣= −Mgl sin θ k1 (1)

5.4. DINAMICA SOLIDULUI RIGID 121
iar ecuatia de miscare a pendulului fizic va avea expresia :
Izz θ + Mgl sin θ = 0 (2)
adica :
θ +g
l′sin θ = 0 unde l′ =
Izz
Ml(3)
Marimea l′ poarta numele de lungime redusa si reprezinta lungimea unui pendul matematic carear oscila cu aceeasi perioada ca cea a pendulului fizic, ın aceleasi conditii initiale. In aproximatiamicilor oscilatii, perioada miscarii pendulului va fi :
T = 2π
√l′
g= 2π
√Izz
Mgl(4)
Folosind teorema lui Steiner, momentul de inertie Izz ın raport cu axa Oz , poate fi exprimatcu ajutorul momentului de inertie Ic
zz ın raport cu o axa paralela la Oz , dar trecand prin centrulde masa C :
Izz = Ml2 + Iczz (5)
Impartind cu Ml si tinand cont de definitia (3), lungimea redusa poate fi scrisa sub forma :
l′ = l +Iczz
Ml= l + l1 unde l1 =
Iczz
Ml(6)
si deoarece l1 > 0, rezulta l′ > l.Daca pendulul ar oscila ın jurul unei axe paralele la axa Oz , care ınsa trece printr-un punct
O1 aflat pe axa Ox la distanta l′ = l + l1 de O , lungimea sa redusa va fi :
l′1 = l1 +Iczz
Ml1= l1 +
Iczz
M
Ml
Iczz
= l1 + l = l′ (7)
deci pendulul ar oscila cu aceeasi perioada ın jurul oricareia din axele considerate. Axa care treceprin O este numita axa de suspensie , iar axa paralela care ar trece prin O1 este numita axade oscilatie , cele doua axe fiind reciproce . Proprietatea ca axa de suspensie poate devenila randul ei axa de oscilatie, si invers, poarta numele de reversibilitate . Odata determinatepozitiile punctelor O si O1 ın raport cu C , asa ıncat ın ambele situatii perioada de oscilatie safie T , poate fi calculata valoarea acceleratiei gravitationale :
g = 4π2 l′
T 2= 4π2 l + l1
T 2(8)
Deoarece conditia de reversibilitate pentru determinarea lui g este foarte dificil de realizat, ınpractica se prefera utilizarea unei metode, cunoscuta sub numele de pendulul lui Kater , ın careaxele care trec prin O , respectiv O1 , sunt succesiv axe de suspensie. Cunoscand distantele l si l1fata de centrul de masa, sunt determinate perioadele T si T1 ale miscarilor ın cele doua situatii.Folosind (6) si (7) pot fi scrise relatiile :
l l′ = l2 +Iczz
M
l1l′1 = l21 +
Iczz
M
(9)

122 CAPITOLUL 5. SOLIDUL RIGID
care prin scadere conduc la egalitatea :
l l′ − l1l′1 = l2 − l21 (10)
Deoarece lungimile reduse sunt legate de perioadele corespunzatoare prin relatiile :
l′ =gT 2
4π2si l′1 =
gT 21
4π2(11)
ecuatia (10) devine :g
4π2(lT 2 − l1T
21 ) = l2 − l21 (12)
de unde rezulta formula :
g = 4π2 l2 − l21lT 2 − l1T 2
1
(13)
care permite calculul acceleratiei gravitationale g , fara a mai fi necesara realizarea conditiei dereversibilitate.
Calculul reactiunii. Deoarece se presupune ca Oz este o axa principala de inertie a rigiduluiın raport cu punctul O, iar momentul fortei de greutate este orientat ın lungul aceleiasi axe,atunci Ixz = Iyz = 0 , Mx = My = 0 si axa Oz este o axa permanenta de rotatie. Punctul fix Ova fi suficient pentru a asigura imobilitatea ıntregii axe indiferent de valoarea lui ω si ın punctulrespectiv este aplicata reactiunea R a legaturii. Teorema impulsului proiectata pe axele Ox siOy conduce la ecuatiile :
Rx = −Mg cos θ −Mlω2
Ry = Mg sin θ + Mlω(14)
Folosind ecuatia de miscare (2) a pendulului fizic se poate scrie (θ = ω) :
ω = − Mgl
Izz
sin θ = − g
l′sin θ (15)
iar din integrala energiei1 :1
2Izzω
2 + Mgl(1− cos θ) = h (16)
unde h este o constanta data de conditiile initiale, rezulta :
ω2 =2Mgl
Izz
cos θ +2(h−Mgl)
Izz
=2g
l′cos θ +
2(h−Mgl)
Mll′(17)
1Inmultind ecuatia (2) cu ω = θ rezulta :
Izzωω + Mglθ sin θ =ddt
(12
Izzω2 −Mgl cos θ
)= 0
deci12
Izzω2 + Mgl(1− cos θ) = h
unde constanta care stabileste nivelul de zero al energiei potentiale este Mgl .

5.4. DINAMICA SOLIDULUI RIGID 123
Inlocuind (17) si (15) ın (14), se obtin expresiile :
Rx = −Mgl′ + 2l
l′cos θ − 2(h−Mgl)
l′
Ry = Mgl′ − l
l′sin θ = Mg
l1l′
sin θ
(18)
In consecinta Rx si Ry sunt functii periodice de timp, deoarece ele sunt functii periodice deunghiul θ, care la randul sau este functie de timp. Se observa ca componenta Rx depinde si deconditiile initiale.
Daca conditiile initiale sunt astfel alese ıncat h < 2Mgl, miscarea este oscilatorie , amplitu-dinea rezultand din anularea expresiei (17) :
α = arccos
(h
Mgl− 1
)(19)
Cazul cel mai interesant ın practica este cel al miscarii rotatorii, cand h > 2Mgl si deci ω nuısi mai schimba semnul ın cursul miscarii. Ca exemplu poate servi miscarea de rotatie a unuivolant ın jurul unei axe care nu trece exact prin centrul de masa, cand reactiunea R a axei va fi ofunctie periodica de timp. Axa fiind elastica si supusa unei forte exterioare periodice, va intra ınoscilatii fortate. Daca perioada de rotatie este foarte apropiata de perioada oscilatiilor proprii aleaxei, poate apare fenomenul de rezonanta care are ca efect cresterea amplitudinilor de oscilatieale axei, care se poate rupe. Pentru a evita acest fenomen, axele au diametre fie foarte mari, fiefoarte mici, pentru ca frecventa oscilatiilor proprii sa fie mult mai mare, respectiv mult mai micadecat turatia rotii, turbinei, elicei, etc.
2. O bara subtire, omogena, de lungime L si masa M , este suspendata ıntr-un punct fix aflatla distanta l de mijlocul barei. Sa se calculeze valoarea lui l pentru care perioada micilor oscilatiieste minima.
Rezolvare : Dispozitivul descris reprezinta un pendul fizic care ın aproximatia micilor oscilatiiare perioada (v. probl. anterioara) :
T = 2π
√Izz
Mgl(1)
Aplicand teorema lui Steiner, momentul de inertie ın raport cu axa Oz care trece prin punctul desuspensie, are expresia :
Izz = Ml2 + Iczz (2)

124 CAPITOLUL 5. SOLIDUL RIGID
unde momentul de inertie ın raport cu o axa paralela la Oz care trece prin centrul de masa este :
Iczz = 2ρ
L2∫
0
x2dx = 2M
L
L3
8
1
3=
1
12ML2 (3)
Folosind aceste rezultate, expresia perioadei devine :
T = 2π
√√√√1
g
(l +
1
12
L2
l
)(4)
Valoarea lui l pentru care perioada micilor oscilatii este minima rezulta din impunerea conditieide extrem :
lmin =
√1
12L2 =
L
2√
3(5)
care ınlocuita ın (4) conduce la rezultatul :
Tmin = 2π
√2lmin
g= 2π
√L
g√
3(6)
5.4.3 Miscarea rigidului cu punct fix
Rigidul are un punct fixat care pentru comoditate este ales ca fiind originea comuna O asistemelor de referinta fix si solidar legat de rigid. Dupa cum s-a aratat anterior, impulsul,momentul cinetic ın raport cu O si energia cinetica a rigidului au forma simpla :
p = M ω × rc ; L = (τω) ; T =1
2ω (τω) =
1
2ω · L =
1
2Iω ω2 (5.122)
unde rc este vectorul de pozitie al centrului de masa al rigidului (avand componentele xc, yc,zc ın sistemul mobil), ω este vectorul rotatie, τ este tensorul de inertie ın raport cu O, iarIω este momentul de inertie ın raport cu o axa care trece prin O si care este suportul lui ω.
Notand cu R forta care asigura imobilitatea punctului O, deoarece MO(R) = 0, teoremaimpulsului si teorema momentului cinetic au ın acest caz expresiile :
ω ×Mrc + ω × (ω ×Mrc) = F + R
(τ ω) + ω × (τω) = MO(F)(5.123)
unde F este rezultanta fortelor exterioare aplicate rigidului. Deoarece cea de a doua ecuatie(5.123) nu contine reactiunea, ea va reprezenta ecuatia fundamentala a miscarii. Ea permitegasirea dependentei de timp a functiilor ωx, ωy, ωz si deci prin intermediul ecuatiilor (5.27) afunctiilor ψ(t), θ(t), ϕ(t). Cu aceasta problema determinarii miscarii este complet rezolvata,deoarece rigidul cu punct fix are trei grade de libertate. Pe de alta parte, odata determinatω(ωx, ωy, ωz), prima ecuatie din (5.123) permite determinarea reactiunii R care apare ın Odatorita imobilizarii punctului respectiv si care este o marime apriori necunoscuta.

5.4. DINAMICA SOLIDULUI RIGID 125
In cazul particular cand axele mobile sunt alese astfel ıncat sa coincida cu axele principaleale elipsoidului de inertie al rigidului ın raport cu O, tensorul τ se reduce la termenii de pediagonala principala, ceilalti fiind nuli, iar vectorul (τω) va avea proiectiile Aωx, Bωy, Cωz
pe axele sistemului mobil. Proiectand cea de a doua ecuatie din (5.123) pe axele sistemuluimobil, rezulta urmatorul sistem de trei ecuatii scalare :
A ωx + (C −B) ωyωz = Mx(F)
B ωy + (A− C) ωzωx = My(F) (5.124)
C ωz + (B − A) ωxωy = Mz(F)
Acestea sunt ecuatiile lui Euler. Solutia sub forma finita a acestor ecuatii nu se poate dadecat ın cateva cazuri particulare. Vor fi studiate ın continuare doar doua dintre acestea.
Cazul Euler-Poinsot
Este examinat cazul particular ın care vectorul MO este nul, adica cand suma momentelorfortelor exterioare ın raport cu punctul fix este nula. Situatia se realizeaza daca, de exemplu,fortele date se reduc la una singura care trece prin O, cum ar fi cazul rigidului greu fixat ıncentrul sau de masa (O ≡ C). Ecuatiile (5.124) devin :
A ωx + (C −B) ωyωz = 0
B ωy + (A− C) ωzωx = 0 (5.125)
C ωz + (B − A) ωxωy = 0
Se remarca identitatea acestor ecuatii cu cele care descriu miscarea de rotatie a rigiduluiliber greu ın jurul centrului sau de masa, care la randul sau descrie o traiectorie determinatade conditiile initiale ın raport cu sistemul fix.
Sistemul (5.125) admite urmatoarele solutii particulare :
ωx = ω0x , ωy = 0 , ωz = 0
ωx = 0 , ωy = ω0y , ωz = 0
ωx = 0 , ωy = 0 , ωz = ω0z
(5.126)
unde ω0x, ω0
y, ω0z sunt valorile initiale ale componentelor vectorului ω. Daca, de exemplu, la
momentul initial sunt ındeplinite conditiile (5.126a), ele vor fi ındeplinite la orice momentulterior si miscarea rigidului va fi o rotatie uniforma ın jurul axei Ox. Deoarece vectorul
ω este constant ın sistemul mobil, el este constant si ın sistemul fix
(dω
dt=
d′ωdt
), ceea ce
ınseamna ca directia axei Ox ramane constanta ın raport cu sistemul fix. Axa Ox fiind axaprincipala de inertie, va fi si o axa permanenta de rotatie a rigidului. In mod analog,conditiile (5.126b) si (5.126c) exprima faptul ca axele Oy, respectiv Oz, pot fi de asemeneaaxe permanente de rotatie, ele fiind si axe principale de inertie ın O.
Daca A 6= B 6= C, prin O trec doar trei axe principale de inertie, ceea ce ınseamna caın acest caz exista doar trei axe permanente de rotatie. Daca elipsoidul de inertie este derevolutie, de exemplu ın jurul axei Oz (A = B 6= C), atunci orice axa din planul xOy care

126 CAPITOLUL 5. SOLIDUL RIGID
trece prin O este o axa principala de inertie si deci o axa permanenta de rotatie. Dacaelipsoidul de inertie se reduce la o sfera (A = B = C), atunci orice axa care trece prin Oeste o axa principala de inertie si deci o axa permanenta de rotatie.
Revenind la cazul general, cand conditiile initiale nu au forma (5.126), se constata casistemul (5.125) admite doua integrale prime. Astfel, ınmultind prima ecuatie cu Aωx, adoua cu Bωy si a treia cu Cωz, adunand si integrand, rezulta :
A2ω2x + B2ω2
y + C2ω2z = ∆2µ2 (5.127)
unde s-a notat constanta de integrare cu ∆2µ2. Pe de alta parte ınmultind prima ecuatie cuωx, a doua cu ωy si a treia cu ωz, adunand si integrand, rezulta :
Aω2x + Bω2
y + Cω2z = ∆ µ2 (5.128)
unde ∆ µ2 este o alta constanta de integrare. Evident, valoarea constantelor de integrareeste determinata de conditiile initiale ale problemei. Integrala prima (5.127) exprima faptulca vectorul moment cinetic al rigidului L = (τω) ın raport cu O, are o valoare constanta.Rezultatul era de asteptat, deoarece din teorema momentului cinetic L = MO(F) rezulta caL este un vector constant daca MO(F) este nul. Integrala prima (5.128) exprima faptul caenergia cinetica a rigidului este o constanta ın problema considerata. Intr-adevar, deoarecefortele interioare si reactiunea punctului fix O nu contribuie la lucrul mecanic, teoremaenergiei se reduce la dT = dLext . Deoarece ın cazul considerat :
dLext =∑
i
Fidri =∑
i
Fividt =∑
i
Fi(ω × ri)dt = ω ·∑i
(ri × Fi)dt = ω ·MO(F) dt = 0
(5.129)
din teorema energiei rezulta T =1
2ω (τω) = const.
Din ecuatiile (5.127) si (5.128) se pot exprima ωx si ωz ın functie de ωy :
ω2x =
B(B − C)
A(A− C)
(α2 − ω2
y
), ω2
z =B(A−B)
C(A− C)
(β2 − ω2
y
)(5.130)
unde
α2 =∆(∆− C)
B(B − C)µ2 , β2 =
∆(A−∆)
B(A−B)µ2 (5.131)
Se observa ca fractiile ce figureaza ın expresiile lui ω2x si ω2
z sunt pozitive daca :
C < B < A (5.132)
ceea ce de altfel nu particularizeaza problema. Atunci α2 si β2 vor trebui sa fie de asemeneapozitivi, deoarece altfel ω2
x si ω2z ar avea doar valori negative. In consecinta, pentru ca
problema sa admita solutii reale, va trebui ca obligator sa fie ındeplinita si conditia :
C < ∆ < A (5.133)
In cele ce urmeaza se va presupune ca α si β sunt doua numere pozitive. Daca ın (5.133) arfigura semne de egalitate, rezultatele se reduc la cazul rotatiilor uniforme discutate anterior.Daca de exemplu A = ∆, atunci β2 = 0 si din (5.130b) rezulta :
B(A−B) ω2y + C(A− C) ω2
z = 0 (5.134)
5.4. DINAMICA SOLIDULUI RIGID 127
deci obligator va trebui ca ωy = ωz = 0, din (5.127) si (5.128) rezultand ca ωx = ±µ .Tinand cont de (5.130), din (5.125b) rezulta o ecuatie diferentiala pentru ωy :
ωy = ±√
(A−B)(B − C)
AC
(α2 − ω2
y
) (β2 − ω2
y
)(5.135)
Presupunem ca datele initiale sunt astfel alese ıncat :
∆ < B (5.136)
Din formulele (5.130) rezulta ca ω2y trebuie sa ramana inferior celui mai mic dintre numerele
α2, β2. Se verifica usor ca α2 < β2. Intr-adevar, din (5.131) rezulta :
α2 − β2 = µ2 ∆(A− C)(∆−B)
B(A−B)(B − C)< 0 (5.137)
Se deduce ca limita superioara a lui ω2y este α2, adica functia ωy(t) va varia ın intervalul
(−α, +α). Pe de alta parte, din (5.130) rezulta ca ωx se anuleaza numai daca ωy = ±α, ıntimp ce ωz ısi pastreaza tot timpul semnul. Pentru a gasi modul cum variaza ın timp functiaωy, va trebui integrata ecuatia (5.135). Impunem ca la momentul initial t0 sa avem ω0
y = 0(ω0
x < 0, ω0z > 0) si alegem semnul (+) ın fata radicalului, ceea ce ınseamna ca functia ωy(t)
ıncepe prin a creste. Cu schimbarea de variabila
ωy = α x (5.138)
ecuatia (5.135) devine :dx√
(1− x2)(1− k2x2)= n dt (5.139)
unde s-au facut notatiile
n = µ
√∆(A−∆)(B − C)
AB C, k2 =
α2
β2< 1 (5.140)
Valoarea lui x si deci a lui ωy la momentul t se obtine integrand expresia (5.139) :
x(t)∫
0
dx√(1− x2)(1− k2x2)
= n (t− t0) (5.141)
In consecinta x(t) si deci ωy(t) va fi o functie eliptica de speta ıntai. Functia ωy pornind dela valoarea initiala ω0
y = 0 va creste monoton pana la valoarea +α cand ωy = 0. Apoi ωy
devine negativ, deci ωy va descreste monoton trecand prin valoarea zero si va atinge valoarea
−α cand ωy se anuleaza din nou. In continuare ωy devine din nou pozitiv, ωy reıncepe sacreasca si va continua sa oscileze ıntre valorile limita +α si −α pe care le atinge periodic.Perioada oscilatiilor lui ωy ıntre limitele amintite se calculeaza folosind (5.141) si va fi :
T =4
n
1∫
0
dx√(1− x2)(1− k2x2)
(5.142)

128 CAPITOLUL 5. SOLIDUL RIGID
Odata determinata functia ωy(t), folosind (5.130) pot fi calculate si functiile ωx(t) si ωz(t),care vor fi de asemenea niste functii eliptice de timp.
Daca datele initiale sunt astfel alese ıncat ∆ > B (β2 < α2), functiile ωx(t), ωy(t), ωz(t) sedetermina printr-un rationament analog cu cel de mai sus, rezultand ca ele sunt de asemeneaniste functii eliptice periodice. Daca ınsa ∆ = B (α2 = β2 = µ2), atunci ın urma unor calculeelementare rezulta ca ωx(t), ωy(t), ωz(t) sunt niste functii hiperbolice de timp.
O solutie simpla a problemei se obtine daca elipsoidul de inertie este un elipsoid de rotatie.Astfel daca A = B 6= C, din ecuatiile (5.125) rezulta :
ωz = ω0z ; ωx + Ω ωy = 0 , ωy − Ω ωx = 0 (5.143)
unde s-a facut notatia
Ω =C − A
Aω0
z (5.144)
Presupunand ω0z > 0 si notand z = ωx + i ωy se obtine pentru z ecuatia diferentiala :
z − i Ω z = 0 (5.145)
care are solutia :
z = C e i Ω (t− t0) (5.146)
Deoarece e ix = cos x + i sin x, folosind si conditia initiala ωx(t0) = ω0x, pentru ωx(t) si ωy(t)
se obtin expresiile :
ωx = ω0x cos Ω(t− t0) , ωy = ω0
x sin Ω(t− t0) (5.147)
In consecinta vectorul ωx i + ωy j are o marime constanta si se roteste uniform ın jurul axeiOz cu viteza unghiulara Ω . Deoarece proiectia vectorului rotatie ω pe Oz este de asemenea
Figura 5.14: Vectorul rotatie ın cazul elipsoidului de revolutie
constanta (egala cu ω0z), unghiul dintre ω si Oz va ramane constant si ın consecinta ın cursul
miscarii vectorul ω va descrie fata de sistemul mobil un con circular avand pe Oz drept axasi varful ın O.
Pentru a rezolva complet problema determinarii miscarii rigidului cu punct fix, va maitrebui gasita dependenta de timp a unghiurilor Euler ψ, θ, ϕ. Inainte de toate trebuieobservat ca ın acest caz, din teorema momentului cinetic rezulta L = 0 , deci momentul

5.4. DINAMICA SOLIDULUI RIGID 129
cinetic L al rigidului este un vector constant L0. Pentru simplitatea calculelor se alege axaOz1 a sistemului fix sa coincida cu L0.
Deoarece coordonatele lui L ın sistemul mobil sunt Aωx, Bωy, Cωz, iar marimea sa esteµ ∆, folosind matricea de rotatie rezulta :
Aωx
Bωy
Cωz
= A ·
0
0
µ ∆
adica
Aωx = µ ∆ sin ϕ sin θ
Bωy = µ ∆ cos ϕ sin θ
Cωz = µ ∆ cos θ
(5.148)
Aceste ecuatii determina pe ϕ(t) si θ(t). Unghiul ψ(t) va fi determinat din ecuatia :
ψ =1
sin θ(ωx sin ϕ + ωy cos ϕ) =
Aω2x + B ω2
y
µ ∆ sin2 θ(5.149)
In cazul particular al elipsoidului de revolutie A = B 6= C, deoarece :
tg ϕ =ωx
ωy
= ctg Ω(t− t0) = tg[π
2− Ω(t− t0)
](5.150)
rezulta pentru ϕ(t) expresia :
ϕ(t) =π
2+
(1− C
A
)ω0
z(t− t0) (5.151)
Unghiul ϕ creste daca C < A sau descreste daca A < C, pornind de la valoareaπ
2pe care o
are pentru t = t0.
Figura 5.15: Cazul Euler-Poinsot. Miscarea de precesie regulata
Pentru a gasi functia θ(t), se observa ca θ reprezinta unghiul dintre vectorul L0 si axaOz. Proiectia lui L0 pe Oz fiind Cω0
z , rezulta ca :
cos θ =Cω0
z
|L0| = const. deci θ = θ0 = const. (5.152)
Astfel axa Oz va descrie un con cu varful ın O ın jurul vectorului L0.

130 CAPITOLUL 5. SOLIDUL RIGID
Functia ψ(t) se obtine integrand ecuatia (5.149), care ın acest caz are forma :
ψ =|L0|A
(5.153)
si ın consecinta :
ψ(t) =|L0|A
(t− t0) + ψ0 (5.154)
Se verifica usor ca vectorii k (0, 0, 1), ω (ωx, ωy, ωz) si L (Aωx, Bωy, Cωz) sunt coplanari,deoarece ω este tot timpul perpendicular pe linia nodurilor. Acest plan va avea o miscare
de rotatie uniforma ın jurul axei Oz1 cu viteza unghiulara ψ =|L0|A
. In concluzie, rigidul
se roteste uniform ın jurul axei sale de simetrie, care la randul ei efectueaza o miscare derotatie uniforma ın jurul axei fixe care trece prin centrul de masa. Miscarea este cunoscuta
sub numele de precesie regulata, viteza precesiei fiind|L0|A
.
Cazul Lagrange-Poisson
Daca punctul fix al rigidului nu coincide cu centrul sau de masa, atunci ın ecuatia (5.123b)MO(F) 6= 0 . Daca asupra punctelor rigidului actioneaza doar greutatea lor proprie, sistemulde forte poate fi ınlocuit cu o forta unica G = Mg , cu punctul de aplicatie ın centrul de masa,care are vectorul de pozitie rc de componente xc, yc, zc ın sistemul de referinta legat solidarde rigid. Notand cu γ versorul axei fixe Oz1 , acesta va avea ın sistemul mobil componentele :
γx = sin θ sin ϕ
γy = sin θ cos ϕ
γx = cos θ
(5.155)
Deoarece momentul ın raport cu O al fortei de greutate are ın sistemul mobil componentele :
MO(G) = rc × (−Mg γ) = −Mg
∣∣∣∣∣∣∣∣
i j k
xc yc zc
γx γy γz
∣∣∣∣∣∣∣∣(5.156)
ecuatia momentului cinetic (5.123b) proiectata pe axele sistemului mobil va da :
A ωx + (C −B) ωyωz = Mg (zcγy − ycγz)
B ωy + (A− C) ωzωx = Mg (xcγz − zcγx) (5.157)
C ωz + (B − A) ωxωy = Mg (ycγx − xcγy)
Rezulta astfel un sistem de trei ecuatii diferentiale pentru sase necunoscute ωx, ωy, ωz, γx,γy, γz. Mai pot fi obtinute ınca trei ecuatii scriind ca vectorul γ este constant ın raport
cu sistemul de referinta fix :dγ
dt=
d′γdt
+ ω × γ = 0 , ceea ce proiectat pe axele sistemului
mobil va da :γx + ωyγz − ωzγy = 0
γy + ωzγx − ωxγz = 0
γz + ωxγy − ωyγx = 0
(5.158)

5.4. DINAMICA SOLIDULUI RIGID 131
Integrand ecuatiile (5.157), (5.158) si tinand cont de (5.155), vor rezulta functiile θ(t) si ϕ(t).Functia ψ(t) va fi apoi determinata folosind ecuatiile cinematice ale lui Euler.
Sistemele (5.157) si (5.158) admit urmatoarele integrale prime :
Aωxγx + B ωyγy + C ωzγz = L0
Aω2x + B ω2
y + C ω2z = − 2Mg (xcγx + ycγy + zcγz) + 2 h
γ2x + γ2
y + γ2z = 1
(5.159)
dintre care ultima este evidenta, deoarece γ este un versor. Prima integrala se obtineınmultind ecuatiile (5.157) respectiv cu γx, γy, γz si ecuatia (5.158) respectiv cu Aωx, B ωy,C ωz, adunand si integrand (L0 este deocamdata o constanta neprecizata). Cea de a doua in-tegrala prima se obtine ınmultind ecuatiile (5.157) respectiv cu ωx, ωy, ωz, adunand, tinand
cont de (5.158) si integrand (h este tot o constanta deocamdata neprecizata). In fond(5.159a) nu reprezinta altceva decat legea de conservare a momentului cinetic. Intr-adevar,proiectand teorema momentului cinetic L = MO(G) pe axa Oz1 a sistemului fix, deoareceMO(G) · γ = 0, rezulta L · γ = 0, ceea ce prin integrare da L · γ = L0. Semnificatia con-stantei L0 devine evidenta, ea reprezentand proiectia momentului cinetic al rigidului pe axafixa Oz1 , proiectie care ın acest caz este o constanta. Explicitand produsul L · γ ın sistemulmobil rezulta (5.159a). Ecuatia (5.159b) exprima teorema conservarii energiei. Se observaca ın acest caz lucrul mecanic elementar al fortelor externe are expresia :
dLext = −Mg γ drc = −Mg d(γxxc + γyyc + γzzc) (5.160)
iar energia cinetica se scrie :
T =1
2
(Aω2
x + B ω2y + C ω2
z
)(5.161)
Introducand aceste expresii ın teorema energiei dT = dLext si integrand, rezulta T = Lext+h,adica tocmai ecuatia (5.159b).
Pentru a integra sistemul de ecuatii (5.157), (5.158) ar trebui sa dispunem de un numar desase integrale prime independente. Se poate ınsa arata ca, deoarece variabila independentat nu intervine explicit ın acest sistem, iar pe de alta parte ca sistemul admite ıntotdeaunaun factor integrant, numarul necesar de integrale prime se reduce patru. Astfel problemaintegrarii sistemului (5.157), (5.158) se reduce la problema gasirii unei a patra integraleprime, ın afara celor trei din (5.159). In conditii initiale generale, sunt cunoscutedoar doua cazuri ın care se poate gasi o a patra integrala prima functie de ωx, ωy, ωz sinedepinzand explicit de timp. Aceste cazuri sunt : cazul Lagrange-Poisson ın care A = B,xc = yc = 0 si cazul Sofia Kowalewskaia ın care A = B = 2 C, zc = 0 . In cele ce urmeazava fi studiat doar primul dintre ele.
Cazul Lagrange-Poisson se realizeaza atunci cand rigidul are doua momente de inertieprincipale (relative la punctul fix) egale, iar centrul de masa se gaseste pe axa corespunzatoarecelui de al treilea moment de inertie principal. Cu conditiile
A = B 6= C , xc = yc = 0 (5.162)
ecuatia (5.157c) furnizeaza cea de a patra integrala prima necesara :
ωz = s (5.163)

132 CAPITOLUL 5. SOLIDUL RIGID
unde s (= ω0z) este o constanta numita spin . Facand aceasta ınlocuire ın primele doua
ecuatii (5.159) si folosind (5.155) rezulta :
ω2x + ω2
y = α− β cos θ
(ωx sin ϕ + ωy cos ϕ) sin θ = γ − δ cos θ(5.164)
unde α, β, γ, δ sunt patru constante (β si δ pozitive) :
α =2h− Cs2
A, β =
2Mgzc
A, γ =
L0
A, δ =
Cs
A(5.165)
Folosind formulele cinematice ale lui Euler (5.24), expresiile (5.163) si (5.164) devin :
ψ cos θ + ϕ = s
ψ2 sin2 θ + θ2 = α− β cos θ
ψ sin2 θ = γ − δ cos θ
(5.166)
Cu notatiacos θ = u (5.167)
din ultima ecuatie (5.166) rezulta :
ψ =γ − δu
1− u2(5.168)
iar ecuatia (5.166b) devine :
u2 = P (u) unde P (u) = (α− βu)(1− u2)− (γ − δu)2 (5.169)
Se obtine astfel cuadratura :
t =
u(t)∫
u0
du√(α− βu)(1− u2)− (γ − δu)2
(5.170)
unde u0 este valoarea initiala a lui u . Radicalul va fi luat cu (+) sau cu (−) dupa cumderivata u la momentul initial este pozitiva sau negativa. In consecinta u(t) si deci θ(t) vafi o functie eliptica de timp. Cunoscand forma functiei u(t), din ecuatiile (5.168) si (5.166a)vor rezulta functiile ψ(t) si ϕ(t). Scrise sub aceasta forma ecuatiile de miscare sunt foartegreu de interpretat din punct de vedere fizic. Din fericire caracterizarea generala a miscariipoate fi realizata si fara a se efectua integrala (5.170).
Se observa ca pentru ca ecuatia (5.169) sa aiba o solutie, va trebui ca polinomul degradul trei P (u) sa fie ≥ 0 . Radacinile acestui polinom vor da unghiurile pentru care θ ısischimba semnul. Separarea radacinilor se face usor remarcand ca P (−∞) < 0 , P (+∞) > 0 ,P (±1) < 0 . Notand cu u0 valoarea initiala a lui u si observand ca u0 ∈ (−1, +1) , deoareceP (u0) ≥ 0 apar doua situatii posibile (v. Fig. 5.16). In ambele cazuri cele trei radacini aleecuatiei P (u) = 0 sunt reale, asa ıncat se va putea scrie :
P (u) = β (u− u1)(u2 − u)(u3 − u) (5.171)

5.4. DINAMICA SOLIDULUI RIGID 133
Figura 5.16: Radacinile polinomului P (u)
Deoarece u < u3 , factorul u3 − u va fi pozitiv si deci pentru ca P (u) sa fie pozitiv va trebuica u1 ≤ u ≤ u2 . Aceasta ınseamna ca unghiul de nutatie θ va trebui sa fie cuprins ıntrevalorile extreme corespunzatoare θ1 , θ2 care vor fi presupuse distincte. Daca u1 < u2 , atunciθ1 > θ2 si deci :
θ2 ≤ θ(t) ≤ θ1 (5.172)
Pornind de la valoarea initiala θ0 corespunzatoare valorii u0, unghiul θ va creste sau descrestedupa cum semnul din fata radicalului este ales (−) sau (+). Presupunand ca s-a ales semnul(−), θ va creste monoton pana va atinge valoarea θ1 . In acest moment polinomul P (u) seanuleaza si ın continuare u ısi schimba semnul, deci θ ıncepe sa descreasca monoton catre
Figura 5.17: Variatia unghiului de nutatie dintre axele Oz1si Oz
cealalta valoare limita θ2 cand polinomul P (u) se anuleaza din nou. Apoi u schimbandu-sidin nou semnul, θ va ıncepe sa creasca pana cand va atinge valoarea θ1 , etc. In consecintaθ(t) este o functie periodica, perioada oscilatiilor valorilor sale fiind :
T = 2
u2∫
u1
du√(α− βu)(1− u2)− (γ − δu)2
(5.173)
In cazul ın care cele doua radacini u1, u2 ale polinomului sunt confundate, deoarece u0
trebuie sa aiba valoarea comuna a celor doua radacini egale, va trebui ca :
P (u) = − β (u− u0)2(u3 − u) (5.174)
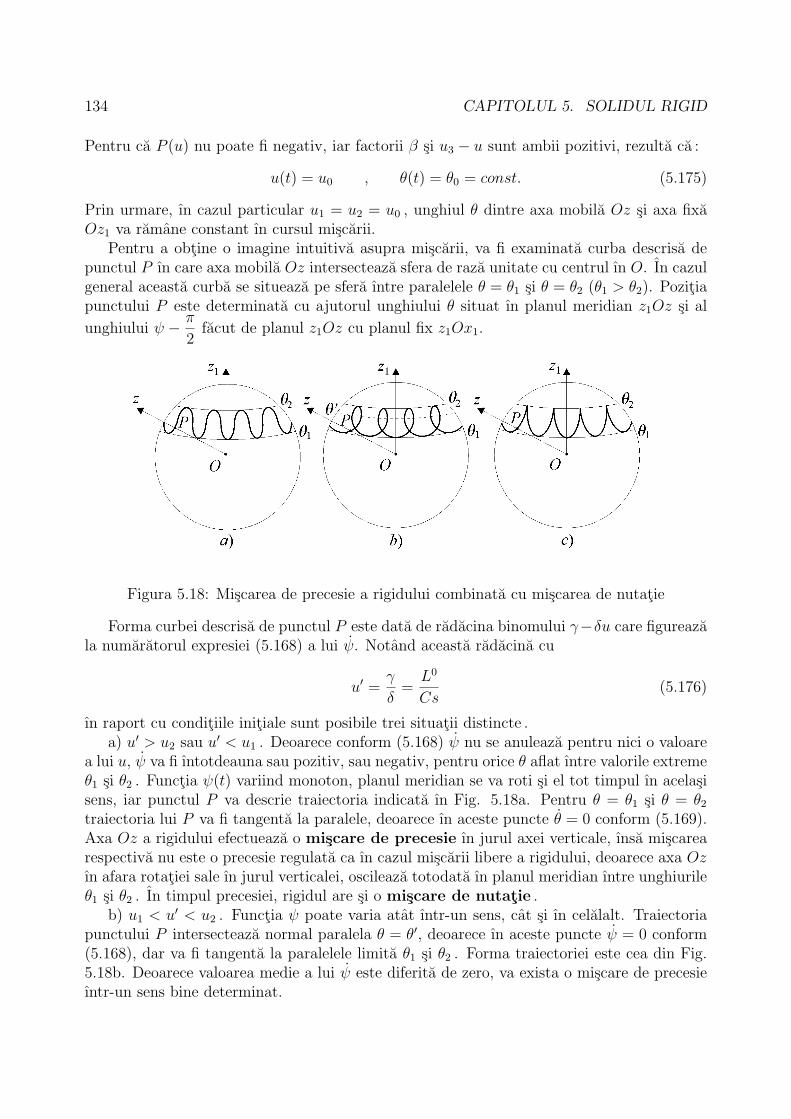
134 CAPITOLUL 5. SOLIDUL RIGID
Pentru ca P (u) nu poate fi negativ, iar factorii β si u3 − u sunt ambii pozitivi, rezulta ca :
u(t) = u0 , θ(t) = θ0 = const. (5.175)
Prin urmare, ın cazul particular u1 = u2 = u0 , unghiul θ dintre axa mobila Oz si axa fixaOz1 va ramane constant ın cursul miscarii.
Pentru a obtine o imagine intuitiva asupra miscarii, va fi examinata curba descrisa depunctul P ın care axa mobila Oz intersecteaza sfera de raza unitate cu centrul ın O. In cazulgeneral aceasta curba se situeaza pe sfera ıntre paralelele θ = θ1 si θ = θ2 (θ1 > θ2). Pozitiapunctului P este determinata cu ajutorul unghiului θ situat ın planul meridian z1Oz si al
unghiului ψ − π
2facut de planul z1Oz cu planul fix z1Ox1.
Figura 5.18: Miscarea de precesie a rigidului combinata cu miscarea de nutatie
Forma curbei descrisa de punctul P este data de radacina binomului γ−δu care figureazala numaratorul expresiei (5.168) a lui ψ. Notand aceasta radacina cu
u′ =γ
δ=
L0
Cs(5.176)
ın raport cu conditiile initiale sunt posibile trei situatii distincte .a) u′ > u2 sau u′ < u1 . Deoarece conform (5.168) ψ nu se anuleaza pentru nici o valoare
a lui u, ψ va fi ıntotdeauna sau pozitiv, sau negativ, pentru orice θ aflat ıntre valorile extremeθ1 si θ2 . Functia ψ(t) variind monoton, planul meridian se va roti si el tot timpul ın acelasisens, iar punctul P va descrie traiectoria indicata ın Fig. 5.18a. Pentru θ = θ1 si θ = θ2
traiectoria lui P va fi tangenta la paralele, deoarece ın aceste puncte θ = 0 conform (5.169).Axa Oz a rigidului efectueaza o miscare de precesie ın jurul axei verticale, ınsa miscarearespectiva nu este o precesie regulata ca ın cazul miscarii libere a rigidului, deoarece axa Ozın afara rotatiei sale ın jurul verticalei, oscileaza totodata ın planul meridian ıntre unghiurileθ1 si θ2 . In timpul precesiei, rigidul are si o miscare de nutatie .
b) u1 < u′ < u2 . Functia ψ poate varia atat ıntr-un sens, cat si ın celalalt. Traiectoriapunctului P intersecteaza normal paralela θ = θ′, deoarece ın aceste puncte ψ = 0 conform(5.168), dar va fi tangenta la paralelele limita θ1 si θ2 . Forma traiectoriei este cea din Fig.5.18b. Deoarece valoarea medie a lui ψ este diferita de zero, va exista o miscare de precesieıntr-un sens bine determinat.

5.4. DINAMICA SOLIDULUI RIGID 135
c) u′ = u1 sau u′ = u2 . In aceasta situatie P (u′) = 0 ceea ce conform (5.169) ınseamna
u′ =α
β. Rezulta ca pe unul din cercurile θ1 sau θ2 va trebui sa avem concomitent θ = 0
si ψ = 0. Se observa ca niciodata conditiile initiale nu pot fi alese astfel ıncat u′ = u1.Intr-adevar, ın acest caz din (5.169) ar rezulta :
P ′(u1) = − β (1− u21) < 0 (5.177)
ceea ce contrazice ınsa relatia
P ′(u1) = β (u2 − u1)(u3 − u1) > 0 (5.178)
care ar rezulta din derivarea expresiei (5.171). Ramane astfel doar posibilitatea u′ = u2.Deoarece ın vecinatatea lui u2, u este de ordinul lui
√u2 − u (v. expr. (5.171)), iar ψ este
de ordinul u2 − u (v. expr. (5.168)), va trebui ca :
limθ→θ2
dψ
dθ= 0 (5.179)
si astfel traiectoria punctului P va intersecta normal paralela θ = θ2 (v. Fig. 5.18c).Revenim la situatia ın care doua radacini ale polinomului (5.169) sunt confundate u1 =
u2 = u0. Dupa cum s-a aratat anterior, va trebui ca u(t) = u0, adica θ(t) = θ0. In consecintaaxa Oz va descrie un con ın jurul axei Oz1. Pe de alta parte din (5.166c) si (5.166a) rezultaca ψ si ϕ sunt constante, ceea ce ınseamna ca axa Oz solidara cu rigidul va descrie conulın jurul lui Oz1 cu viteza unghiulara constanta ψ, ın timp ce rigidul se roteste uniform cuviteza unghiulara ϕ ın jurul axei Oz. Miscarea, dupa cum s-a vazut si cu alte ocazii, esteo precesie regulata. Pentru a gasi conditiile initiale care trebuie ındeplinite pentru a serealiza o astfel de miscare, se elimina factorii α − βu0 si γ − δu0 din ecuatiile P (u0) = 0,P ′(u0) = 0 si (5.166c). Rezulta ın final :
Csψ0 − Aψ20 cos θ0 = Mgzc (5.180)
sau eliminand pe s cu ajutorul lui (5.166a) :
Cϕ0ψ0 + (C − A)ψ20 cos θ0 = Mgzc (5.181)
unde ψ0 si ϕ0 sunt valorile initiale ale lui ψ si ϕ. In concluzie, precesia regulata ın cazulLagrange-Poisson este un caz particular, nu ca ın cazul Euler-Poinsot unde precesia regulataare loc ıntotdeauna cand elipsoidul de inertie este elipsoid de revolutie.
Efectul giroscopic
Giroscopul este un rigid axial simetric avand un punct al axei fixat si caruia i s-aimprimat o rotatie initiala rapida ın jurul axei. Se alege axa Oz astfel ıncat ea sa coincida cuaxa rigidului (A = B), iar punctul fixat va constitui originea celor doua sisteme de referinta,fix si solidar legat de rigid. Sunt ındeplinite astfel conditiile pentru a folosi formalismulcazului Lagrange-Poisson.

136 CAPITOLUL 5. SOLIDUL RIGID
Presupunem ca rigidului aflat ıntr-o pozitie oarecare ψ0, ϕ0 si 0 < θ0 < π, i se imprima oviteza de rotatie foarte mare ın jurul axei sale. Aceasta ınseamna ca urmeaza sa se studiezecomportarea solutiei cazului Lagrange-Poisson cu conditiile initiale
ψ0 = 0 , θ0 = 0 , ϕ0 À 1 (5.182)
Folosind formulele cinematice ale lui Euler rezulta :
ω0x = ω0
y = 0 , ω0z = ϕ0 = s À 1 (5.183)
In aceste conditii, din (5.166b) si (5.166c) rezulta :
α = β u0 , γ = δ u0 (5.184)
iar polinomul ce figureaza ın membrul drept al lui (5.169) devine :
P (u) = (u0 − u)[ β(1− u2)− δ2(u0 − u)] (5.185)
In plus, din (5.168) si (5.166a) se mai obtine :
ψ =δ(u0 − u)
1− u2, ϕ = s− u
δ(u0 − u)
1− u2(5.186)
Deoarece u0 este sigur o radacina a polinomului P (u), ınseamna ca u0 coincide sau cu u1,
Figura 5.19: Giroscopul. Radacinile polinomului P (u)
sau cu u2. Insa dupa cum s-a vazut, indiferent de conditiile alese u0 6= u1 si ramane doarposibilitatea u0 = u2. Polinomul P (u) va fi nenegativ doar ın domeniul u1 ≤ u ≤ u0.Radacinile u1 si u3 pot fi determinate usor din ecuatia :
β(1− u2)− δ2(u0 − u) = 0 (5.187)
Evident, solutia u3 este exclusa si ne va interesa comportarea solutiei u1 atunci cand s estefoarte mare. Scriind (5.187) sub forma :
u0 − u =β
δ2(1− u2) (5.188)

5.4. DINAMICA SOLIDULUI RIGID 137
deoarece δ =Cs
A, rezulta ca u0−u este de ordinul
1
s2. Introducand functia ε(t) prin definitia
θ(t) = θ0 +ε(t)
s2(5.189)
si folosind dezvoltarea ın serie Taylor, rezulta :
cos θ = cos(θ0 +
ε
s2
)= cos θ0 − sin θ0
s2ε + . . . (5.190)
In consecinta :
u = u0 − sin θ0
s2ε , u = − sin θ0
s2ε (5.191)
si ecuatia diferentiala u2 = P (u) cu P (u) scris ın forma (5.185) devine :
ε2 = ε (βs2 sin θ0 − δ2ε) (5.192)
unde s-a facut ınlocuirea aproximativa 1 − u2 ≈ 1 − u20 = sin2 θ0. Punand expresia (5.192)
sub forma :dε√
− ε2 +βs2
δ2sin θ0 ε
= δ dt (5.193)
prin integrare2 rezulta :
arcsin2 δ2ε− βs2 sin θ0
βs2 sin θ0
= δt + C (5.194)
unde C este o constanta de integrare care contine conditii initiale. Deoarece pentru t = t0 = 0
avem θ(t0) = θ0, din (5.189) rezulta ε(t0) = 0 si deci C = − π
2. In consecinta :
2 δ2ε− βs2 sin θ0
βs2 sin θ0
= − cos δt (5.195)
de unde rezulta :
ε(t) =βs2
2δ2sin θ0 (1− cos δt) (5.196)
adica :
θ(t) = θ0 +β
2δ2sin θ0 (1− cos δt) (5.197)
Unghiul de nutatie va fi deci o functie periodica de t cu perioada T =2π
δ=
2πA
Cs, perioada
care este cu atat mai mica cu cat s este mai mare, adica cu cat rigidul se roteste mai rapid.
2Se foloseste formula :
∫dx√
ax2 + bx + c= − 1√−a
arcsin2ax + b√b2 − 4ac
+ C pentru
a < 0b2 − 4ac > 0

138 CAPITOLUL 5. SOLIDUL RIGID
Viteza precesiei se determina folosind formula (5.186c). Facand aceeasi aproximatie1− u2 ≈ 1− u2
0 = sin2 θ0 si utilizand (5.191) si (5.196) se obtine :
ψ =δ ε
s2 sin θ0
=β
2δ(1− cos δt) (5.198)
ceea ce prin integrare va da :
ψ(t) = ψ0 +β
2δ
(t− 1
δsin δt
)(5.199)
Se observa ca valoarea medie a vitezei de precesie este diferita de zero :
ψ =1
T
T∫
0
ψ(t) dt =δ
2π
β
2δ
2πδ∫
0
(1− cos δt) dt =β
2δ(5.200)
Pentru a interpreta fizic aceste rezultate, ele se transcriu avand ın vedere ca β =2Mgzc
A
si δ =Cs
A. Rezulta :
θ(t) = θ0 +A
C2
Mgzc
s2sin θ0
(1− cos
C
Ast
); ψ =
Mgzc
Cs
(1− cos
C
Ast
)
ψ(t) = ψ0 +Mgzc
Cs
(t− A
Cssin
C
Ast
); ψ =
Mgzc
Cs
(5.201)
Se obtine astfel tabloul complet al miscarii giroscopului aflat ın rotatie rapida ın jurul axeisale, formulele (5.201) continand ecuatiile parametrice ale urmei punctului P pe sfera unitatedin Fig. 5.18c pentru cazul θ2 = θ0 . Curba va fi o succesiune de cicloide. Odata eliberataaxa de simetrie a giroscopului, ın loc ca ea sa se deplaseze ın plan vertical, asa cum ne-amastepta pe baza datelor initiale si avand ın vedere ca asupra rigidului actioneaza doar fortade greutate verticala, ea are si o deplasare perpendiculara pe acest plan ın sensul lui ψcrescator. Efectul, care se datoreaza spinului s À 1, poarta numele de efect giroscopic .In afara miscarii de precesie, apare si o miscare de nutatie a axei giroscopului, care are uncaracter periodic. Cu cat s initial este mai mare, amplitudinea si perioada nutatiei este maimica, scazand totodata si viteza precesiei. Practic, nutatia giroscopului suficient de rapideste puternic amortizata de frecarea ın punctul de sprijin, ea devenind cu timpul neglijabila,asa ıncat miscarea giroscopului pare a fi , la un timp ulterior momentului initial, o precesieregulata ın jurul axei verticale. Deoarece aceasta precesie este doar aproximativ regulata, eaa primit numele de precesie pseudoregulata .
In fine, examinam si cazul particular ın care θ0 = 0 (u0 = 1). Atunci conform (5.164) vatrebui ca α = β si γ = δ , ecuatia diferentiala (5.169) scriindu-se :
u2 = (1− u)2[ β(1 + u)− δ2] (5.202)
Se observa ca u = 1 este o radacina dubla a polinomului ce figureaza ın dreapta ecuatiei(5.202), iar a treia radacina va fi :
u3 =δ2
β− 1 =
C2s2
2MgzcA− 1 (5.203)
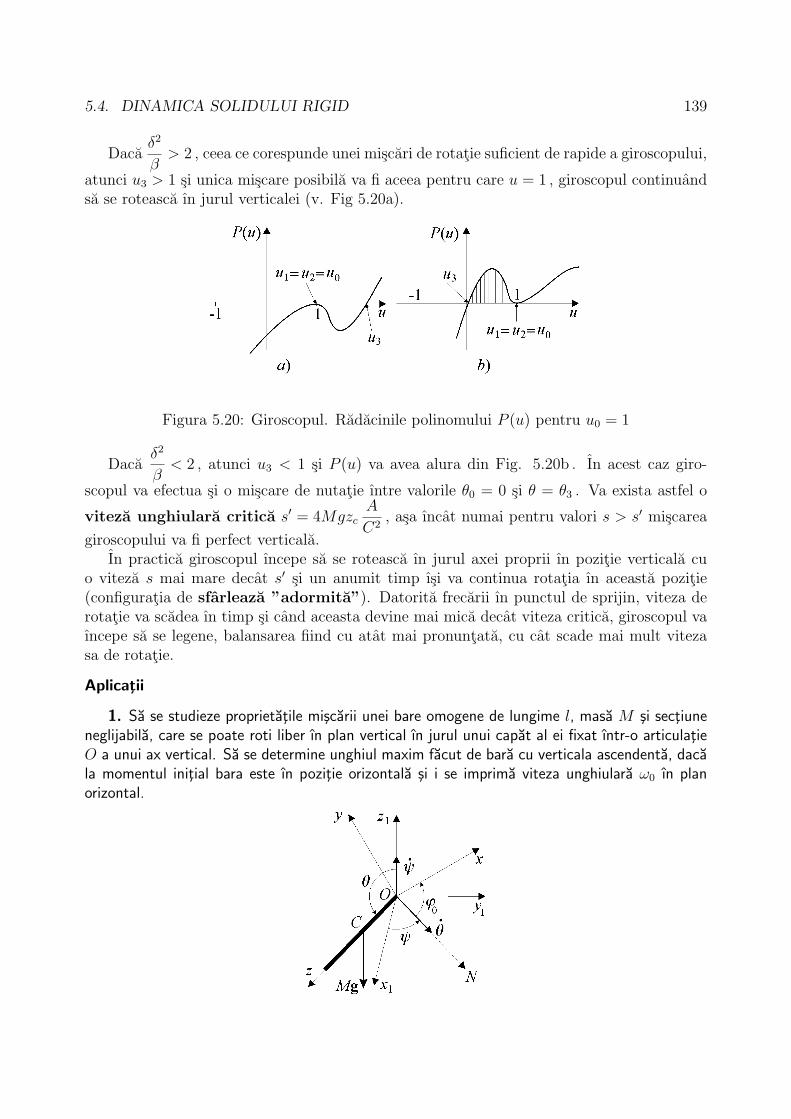
5.4. DINAMICA SOLIDULUI RIGID 139
Dacaδ2
β> 2 , ceea ce corespunde unei miscari de rotatie suficient de rapide a giroscopului,
atunci u3 > 1 si unica miscare posibila va fi aceea pentru care u = 1 , giroscopul continuandsa se roteasca ın jurul verticalei (v. Fig 5.20a).
Figura 5.20: Giroscopul. Radacinile polinomului P (u) pentru u0 = 1
Dacaδ2
β< 2 , atunci u3 < 1 si P (u) va avea alura din Fig. 5.20b . In acest caz giro-
scopul va efectua si o miscare de nutatie ıntre valorile θ0 = 0 si θ = θ3 . Va exista astfel o
viteza unghiulara critica s′ = 4MgzcA
C2, asa ıncat numai pentru valori s > s′ miscarea
giroscopului va fi perfect verticala.In practica giroscopul ıncepe sa se roteasca ın jurul axei proprii ın pozitie verticala cu
o viteza s mai mare decat s′ si un anumit timp ısi va continua rotatia ın aceasta pozitie(configuratia de sfarleaza ”adormita”). Datorita frecarii ın punctul de sprijin, viteza derotatie va scadea ın timp si cand aceasta devine mai mica decat viteza critica, giroscopul vaıncepe sa se legene, balansarea fiind cu atat mai pronuntata, cu cat scade mai mult vitezasa de rotatie.
Aplicatii
1. Sa se studieze proprietatile miscarii unei bare omogene de lungime l, masa M si sectiuneneglijabila, care se poate roti liber ın plan vertical ın jurul unui capat al ei fixat ıntr-o articulatieO a unui ax vertical. Sa se determine unghiul maxim facut de bara cu verticala ascendenta, dacala momentul initial bara este ın pozitie orizontala si i se imprima viteza unghiulara ω0 ın planorizontal.

140 CAPITOLUL 5. SOLIDUL RIGID
Rezolvare : Alegand ın O originea comuna a celor doua sisteme de referinta, fix si mobil, iaraxa Oz este ın lungul barei, tensorul de inertie are forma diagonala :
τ =
I 0 00 I 00 0 0
(1)
unde :
I =
l∫
0
z2dm = ρ
l∫
0
z2dz =M
l
l3
3=
1
3Ml2 (2)
Deoarece unghiul de rotatie proprie este constant ın cursul miscarii, componentele vectoruluirotatie ın sistemul mobil vor fi :
ωx = ψ sin ϕ0 sin θ + θ cos ϕ0
ωy = ψ cos ϕ0 sin θ − θ sin ϕ0
ωz = ψ cos θ
(3)
Se observa ca ın cursul miscarii momentul ın raport cu O al greutatii este perpendicular pe axafixa Oz1 , ceea ce are drept consecinta conservarea proiectiei pe axa Oz1 a momentului cinetic :
Iωx sin θ sin ϕ0 + Iωy sin θ cos ϕ0 = L0 (4)
O alta marime care se conserva ın cursul miscarii este energia mecanica totala :
1
2I(ω2
x + ω2y) + Mg
l
2cos θ = h (5)
Cele doua integrale prime pot fi transcrise ın forma :
ω2x + ω2
y = α− β cos θ
(ωx sin ϕ0 + ωy cos ϕ0) sin θ = γ(6)
unde s-au facut notatiile :
α =2h
I, β =
Mgl
I, γ =
L0
I(7)
Tinand cont de formulele (3), relatiile (6) devin :
ψ2 sin2 θ + θ2 = α− β cos θ
ψ sin2 θ = γ(8)
Trecand la functia
u = cos θ ; 0 < θ < π , − 1 < u < +1 (9)
si observand ca :
ψ =γ
1− u2> 0 (10)
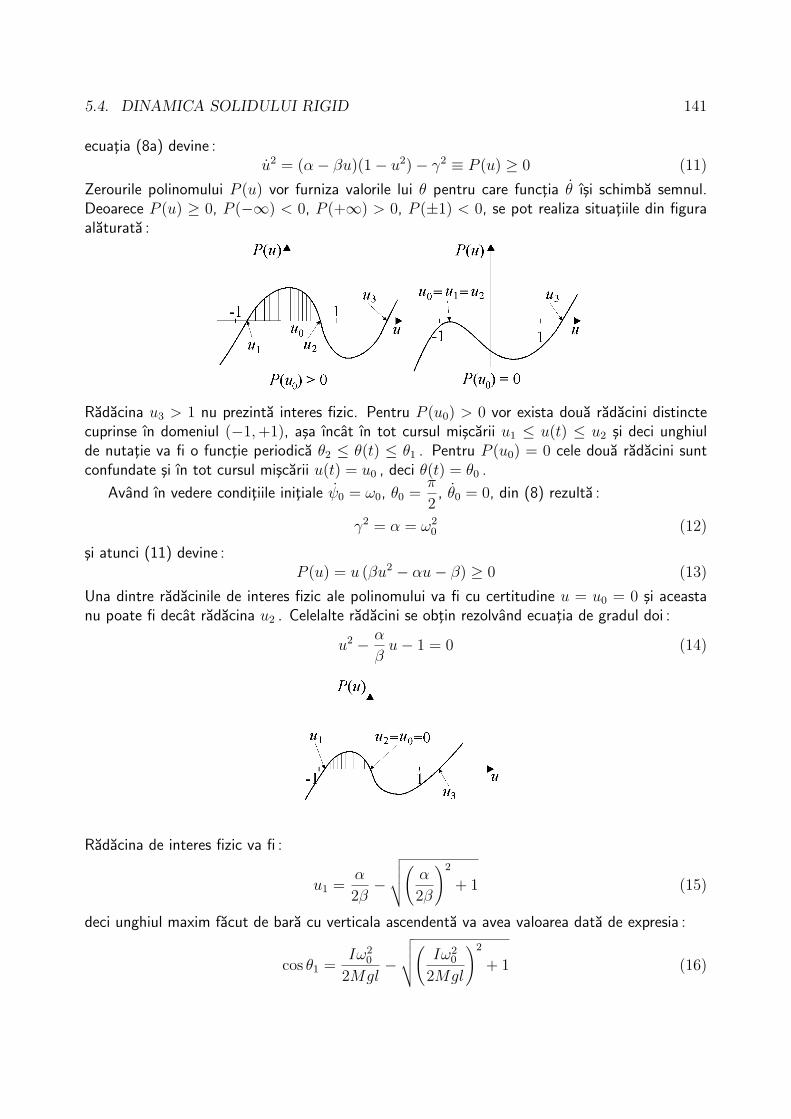
5.4. DINAMICA SOLIDULUI RIGID 141
ecuatia (8a) devine :u2 = (α− βu)(1− u2)− γ2 ≡ P (u) ≥ 0 (11)
Zerourile polinomului P (u) vor furniza valorile lui θ pentru care functia θ ısi schimba semnul.Deoarece P (u) ≥ 0, P (−∞) < 0, P (+∞) > 0, P (±1) < 0, se pot realiza situatiile din figuraalaturata :
Radacina u3 > 1 nu prezinta interes fizic. Pentru P (u0) > 0 vor exista doua radacini distinctecuprinse ın domeniul (−1, +1), asa ıncat ın tot cursul miscarii u1 ≤ u(t) ≤ u2 si deci unghiulde nutatie va fi o functie periodica θ2 ≤ θ(t) ≤ θ1 . Pentru P (u0) = 0 cele doua radacini suntconfundate si ın tot cursul miscarii u(t) = u0 , deci θ(t) = θ0 .
Avand ın vedere conditiile initiale ψ0 = ω0, θ0 =π
2, θ0 = 0, din (8) rezulta :
γ2 = α = ω20 (12)
si atunci (11) devine :P (u) = u (βu2 − αu− β) ≥ 0 (13)
Una dintre radacinile de interes fizic ale polinomului va fi cu certitudine u = u0 = 0 si aceastanu poate fi decat radacina u2 . Celelalte radacini se obtin rezolvand ecuatia de gradul doi :
u2 − α
βu− 1 = 0 (14)
Radacina de interes fizic va fi :
u1 =α
2β−
√√√√(
α
2β
)2
+ 1 (15)
deci unghiul maxim facut de bara cu verticala ascendenta va avea valoarea data de expresia :
cos θ1 =Iω2
0
2Mgl−
√√√√(
Iω20
2Mgl
)2
+ 1 (16)
Capitolul 6
Mecanica mediilor continuedeformabile
6.1 Notiuni fundamentale si principii generale
Unul din capitotele cele mai importante ale mecanicii ıl reprezinta cel referitor la studiulsistemelor cu un numar foarte mare (practic infinit) de puncte materiale, care sunt dispusecompact ın spatiu. Un astfel de sistem va fi numit mediu continuu , care poate fi deforma-bil sau nedeformabil , dupa cum distantele reciproce dintre puncte, ca si unghiurile dintreelementele liniare, se modifica sau nu se modifica ın cursul miscarii. Daca pentru studiulmiscarii mediului continuu nedeformabil (rigid) era suficient conceptul de punct material,conditiile de rigiditate reducand semnificativ numarul gradelor de libertate, pentru studiulmiscarii mediului continuu deformabil utilizarea unui astfel de concept ısi pierde sensul, de-oarece chiar daca ar putea fi scrise ecuatiile de miscare pentru fiecare punct ın parte, ele nu arputea fi integrate din cauza complexitatii calculelor matematice. O descriere aproximativa,ınsa suficient de exacta a miscarii mediului continuu deformabil, poate fi realizata folosindconceptul de particula materiala.
6.1.1 Conceptul de particula materiala
Prin particula materiala se ıntelege o portiune arbitrar de mica a mediului, care contineun numar relativ mic de puncte materiale ın raport cu numarul celor care alcatuiesc sistemul,ınsa suficient de mare pentru ca proprietatile sale sa poata fi caracterizate cu ajutoul unorparametri macroscopici. Pozitia particulei materiale la un moment oarecare t este data devectorul de pozitie al centrului sau de masa, mediat pe un interval de timp care ıl contine pe tsi care este mai mare decat timpul caracteristic miscarii unui punct material individual aflatsub actiunea celorlalte puncte, ınsa foarte mic ın raport cu timpul ın care se produc modi-ficari semnificative ale parametrilor macroscopici ai mediului. Deoarece aceste imprecizii ıncunoasterea pozitiei si timpului sunt foarte mici, ele pot fi neglijate, asa ıncat studiul miscariiparticulei materiale poate fi efectuat folosind metodele cunoscute din dinamica punctului. Incursul evolutiei ın timp a sistemului sub actiunea unor forte exterioare, particula materialaısi modifica pozitia, forma si dimensiunile. Desi ın cazul solidelor deformatiile pot ramanemici chiar pentru intervale mari de timp, spre deosebire de cazul fluidelor pentru care acestea
142

6.1. NOTIUNI FUNDAMENTALE SI PRINCIPII GENERALE 143
pot fi apreciabile, pana la un punct teoria matematica a cinematicii si dinamicii deformatiiloreste comuna pentru ambele tipuri de materiale.
Miscarea unui mediu deformabil poate fi reprezentata matematic printr-o transformarecontinua a spatiului euclidian ın el ınsusi, parametrul transformarii fiind timpul t . Pen-tru definirea acestei transformari, se considera un sistem de coordonate rectangular si fixOx1x2x3 . Domeniul ocupat de mediul continuu la momentul t0 = 0 va fi notat cu D0 , iardomeniul ocupat la momentul ulterior t va fi notat cu Dt . O particula materiala M aflatainitial ın pozitia r0(x
01, x
02, x
03) se va gasi la momentul t ın pozitia r(x1, x2, x3) si evident :
r = r(r0, t) = r(x01, x
02, x
03, t) (6.1)
Individualizand particula M (deci fixand pe r0), ecuatia (6.1) va reprezenta traiectoriaparticulei M . Fixand pe t si dand lui r0 toate valorile posibile corespunzatoare punctelordin D0 , aceeasi ecuatie (6.1) va reprezenta transformarea domeniului D0 ın Dt . Vor
Figura 6.1: O transformare a domeniului D0 ın Dt
fi luate ın considerare doar acele transformari ale lui D0 ın Dt , care au loc fara fisuri saugoluri interioare, ceea ce ınseamna ca functiile (6.1) sunt presupuse continue pe tot domeniullor de definitie. In plus se presupune ca trecerea de la domeniul D0 la domeniul Dt estereversibila , deci ca transformarea (6.1) este inversabila, jacobianul J al transformarii (6.1)fiind nenul si marginit :
0 6= J < ∞ unde J =∂(x1, x2, x3)
∂(x01, x
02, x
03)
(6.2)
Astfel, transformarea inversa
r0 = r0(r, t) = r0(x1, x2, x3, t) (6.3)
este de asemenea continua. Conditia (6.2) exprima ın fond principiul indestructibilitatiimateriei , deoarece nici un domeniu caruia ıi corespunde un volum pozitiv finit nu se poatedeforma ıntr-un domeniu avand volumul nul sau infinit.
Variabilele (r0, t) sunt numite coordonate materiale sau lagrangeene , iar variabilele(r, t) se numesc coordonate spatiale sau euleriene . O functie oarecare F , care corespunde

144 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
unui parametru macroscopic caracteristic particulei, poate fi exprimata atat cu ajutorulvariabilelor lagrangeene, cat si cu ajutorul celor euleriene. In primul caz, prin F = F (r0, t)se va ıntelege valoarea lui F la momentul t pentru particula care la momentul initial t0 = 0se afla ın pozitia r0 , deci F (r0, t) va fi o functie legata de particula ın miscare. Prin F (r, t)se va ıntelege valoarea lui F pentru particula care la momentul t se gaseste ın punctul ral spatiului. Valorile F (r0, t) si F (r, t) sunt legate prin intermediul transformarilor (6.1) si(6.3) care permit trecerea de la una la alta.
Se pot considera doua tipuri de derivate :
∂F (r0, t)
∂t≡ dF
dt(6.4)
∂F (r, t)
∂t≡ ∂F
∂t6= dF
dt(6.5)
Derivata (6.4) reprezinta viteza de variatie a lui F pentru o particula mobila individualizatasi se numeste derivata substantala sau materiala . Derivata (6.5) reprezinta viteza devariatie a lui F ın punctul fixat r al spatiului si se numeste derivata locala .
Viteza unei particule se va calcula ca si ın cazul punctelor materiale mobile cu formula :
v =dr(r0, t)
dt=
∂r(r0, t)
∂t(derivata substantiala !) (6.6)
fiind functie de variabilele materiale. Folosind ın aceasta expresie transformarea (6.3) seobtine campul vitezelor la momentul arbitrar t sub forma v = v(r, t) , adica repartitiavitezelor ın toate punctele domeniului Dt.
Acceleratia unei particule reprezinta derivata substantiala dupa timp a vitezei, adica :
a =dv
dt=
dv(r0, t)
dt=
∂v(r0, t)
∂t=
∂2r(r0, t)
∂t2(6.7)
fiind de asemenea o functie de variabilele materiale. Folosind din nou transformarea (6.3), re-zulta campul acceleratiilor la momentul t sub forma a = a(r, t) . La campul acceleratiilorse poate ajunge si direct, pornind de la campul vitezelor v = v(r, t) si tinand cont de (6.1) :
a =dv
dt=
∂v
∂t+
3∑
i=1
∂v
∂xi
dxi
dt=
∂v
∂t+ (v · grad)v (6.8)
In consecinta, acceleratia ıntr-un punct r al spatiului se compune dintr-un termen local∂v
∂tcare se datoreste nestationaritatii campului vitezelor si care se calculeaza considerand per fixat, si un termen (v · grad)v cauzat de neomogenitatea campului vitezelor care secalculeaza considerand pe t fixat.
Generalizand (6.8) pentru o functie oarecare F (r, t) legata de particula ın miscare, rezultaexpresia pentru derivata substantiala a lui F ın variabile euleriene :
dF
dt=
∂F
∂t+
3∑
i=1
∂F
∂xi
dxi
dt=
∂F
∂t+ (v · grad) F (6.9)
Formula exprima ın fond legatura dintre derivata substantiala si cea locala .

6.1. NOTIUNI FUNDAMENTALE SI PRINCIPII GENERALE 145
6.1.2 Ecuatia de continuitate a masei
Unul din principiile fundamentale care stau la baza mecanicii mediilor continue ıl con-stituie principiul invariantei masei , conform caruia masa oricarei portiuni a mediuluiramane constanta ın tot cursul miscarii. Introducand masa specifica ρ(r, t) prin definitia :
dm = ρ(r, t) dv , dv = dx1dx2dx3 (6.10)
unde dv este elementul de volum suport al lui dm , expresia matematica a principiuluiinvariantei masei va avea forma :
∫
D0
ρ0(r0, t0) dv0 =∫
Dt
ρ(r, t) dv (6.11)
Efectuand ın cea de a doua integrala schimbarea de variabila (6.1), domeniul Dt se transformaın D0 si astfel :
dv = J dv0 cu J =∂(x1, x2, x3)
∂(x01, x
02, x
03)
(6.12)
Ecuatia (6.11) devine : ∫
D0
(ρ0 − J ρ) dv0 = 0 (6.13)
care trebuie sa aiba loc oricare ar fi domeniul D0 . Admitand continuitatea integrantului,egalitatea (6.13) este satisfacuta daca acesta se anuleaza. Se obtine astfel ecuatia de con-tinuitate a masei ın forma lui d’Alembert :
J ρ = ρ0 (6.14)
Rezultatul reprezinta conditia pe care trebuie sa o ındeplineasca functia ρ(r, t) pentru casa fie satisfacut principiul invariantei masei. Daca ın cursul miscarii la orice moment detimp este ındeplinita egalitatea ρ = ρ0 , adica J = 1 , se spune ca mediul respectiv esteincompresibil .
Conditia de invarianta ın timp a masei mai poate fi exprimata si prin anularea derivateiın raport cu timpul a masei continute ın domeniul Dt :
d
dt
∫
Dt
ρ(r, t) dv = 0 (6.15)
Se observa ca trebuie calculata derivata unei integrale care este extinsa la un domeniu carevariaza ın timp. Pentru a efectua derivata va trebui ca ın prealabil, folosind transformarea(6.1), sa se realizeze trecerea la domeniul fix D0 :
d
dt
∫
Dt
ρ(r, t) dv =d
dt
∫
D0
ρ J dv0 =∫
D0
d
dt(ρ J) dv0 =
∫
D0
(dρ
dtJ + ρ
dJ
dt
)dv0 (6.16)

146 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
Utilizand teorema lui Euler1 :dJ
dt= J · div v (6.17)
expresia (6.16) devine :
d
dt
∫
Dt
ρ(r, t) dv =∫
D0
(dρ
dt+ ρ div v
)J dv0 =
∫
Dt
(dρ
dt+ ρ div v
)dv (6.18)
Trecand de la derivata substantiala la cea locala si tinand cont de relatia
div (ρv) = ρ div v + v · grad ρ (6.19)
1Pentru a evalua derivata ın raport cu timpul a jacobianului transformarii (6.1), se face observatia cadeterminantul respectiv poate fi scris sub forma unei dezvoltari dupa elementele unei linii i :
J =∂(x1, x2, x3)∂(x0
1, x02, x
03)
=3∑
j=1
∂xi
∂x0j
Aji
unde Aji reprezinta complementul algebric al elementului
∂xi
∂x0j
. Pe de alta parte :
0 =3∑
j=1
∂xi
∂x0j
Ajk , k 6= i
deoarece dezvoltarea din membrul al doilea corespunde situatiei ın care elementele liniei k sunt ınlocuite cuelementele liniei i din determinant. Cele doua relatii pot fi scrise condensat sub forma :
J δik =3∑
j=1
∂xi
∂x0j
Ajk , δik =
1 , i = k
0 , i 6= k
Jacobianul J fiind un determinant, derivata sa se calculeaza formand suma determinantilor construiti prinderivarea pe rand a elementelor din cate o singura linie :
dJ
dt=
3∑
i,j=1
ddt
(∂xi
∂x0j
)Aj
i
Insa tinand cont de (6.1) si de faptul ca v = v(r, t), se obtine succesiv :
ddt
(∂xi
∂x0j
)=
∂
∂t
(∂xi(r0, t)
∂x0j
)=
∂
∂x0j
(∂xi
∂t
)=
∂vi
∂x0j
=3∑
k=1
∂vi
∂xk
∂xk
∂x0j
si atunci derivata lui J devine :
dJ
dt=
3∑
i,j,k=1
∂vi
∂xk
∂xk
∂x0j
Aji =
3∑
i,k=1
∂vi
∂xkJ δki = J
3∑
i=1
∂vi
∂xi= J · div v
Rezultatul obtinut reprezinta teorema lui Euler , conform careia daca este urmarita o particula materialaın timp, atunci :
dJ
dt= J · div v

6.1. NOTIUNI FUNDAMENTALE SI PRINCIPII GENERALE 147
rezultatul (6.18) se mai poate scrie si sub forma :
d
dt
∫
Dt
ρ(r, t) dv =∫
Dt
(dρ
dt+ ρ div v
)dv =
∫
Dt
[∂ρ
∂t+ div (ρv)
]dv (6.20)
Deoarece ın baza principiului invariantei masei, integralele obtinute trebuie sa fie nule pentruorice Dt , va trebui ca :
dρ
dt+ ρ div v = 0 sau
∂ρ
∂t+ div (ρv) = 0 (6.21)
Se obtine astfel ecuatia de continuitate a masei ın forma lui Euler. Cele doua forme(6.14) si (6.21) ale ecuatiei de continuitate sunt echivalente. Intr-adevar, ınmultind (6.21a)cu J si folosind teorema lui Euler (6.17), rezulta :
Jdρ
dt+ ρ J div v = J
dρ
dt+ ρ
dJ
dt=
d
dt(J ρ) = 0 deci J ρ = ρ0 (6.22)
unde ρ0 este constanta a carei valoare rezulta din impunerea conditiilor initiale (la t = t0 vatrebui ca J = 1). Daca mediul este incompresibil (ρ = const .), atunci din (6.21a) rezultaproprietatea : div v = 0 .
In o serie de calcule intervin derivatele :
d
dt
∫
Dt
F (r, t) dv =∫
Dt
(dF
dt+ F div v
)dv =
∫
Dt
[∂F
∂t+ div (F v)
]dv (6.23)
si :
d
dt
∫
Dt
ρ(r, t) F (r, t) dv =∫
Dt
[d (ρ F )
dt+ (ρ F ) div v
]dv =
=∫
Dt
[ρ
dF
dt+ F
(dρ
dt+ ρ div v
)]dv =
∫
Dt
ρdF
dtdv (6.24)
Derivata (6.23) reprezinta o generalizare a formulei (6.20), iar pentru evaluarea derivatei(6.24) se tine cont si de ecuatia de continuitate a masei (6.21a).
6.1.3 Caracteristici dinamice si teoreme generale
Folosind definitiile generale cunoscute de la studiul sistemelor de puncte materiale, potfi scrise usor impulsul si momentul cinetic pentru mediul material care ocupa domeniulDt . Deoarece acum substata este distribuita continuu ın spatiu, sumele se transforma ınintegrale, expresiile corespunzatoare fiind :
p =∫
Dt
v dm =∫
Dt
ρv dm ; L0 =∫
Dt
(r× v) dm =∫
Dt
(r× ρv) dv (6.25)
Aici r reprezinta vectorul de pozitie al particulei materiale care la timpul t are viteza v .

148 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
In ceea ce priveste fortele care actioneaza asupra si ın interiorul mediului continuu,acestea pot fi forte exterioare si forte interioare . Fortele exterioare se datoresc actiuniicorpurilor exterioare asupra mediului considerat, iar fortele interioare iau nastere ıntre ele-mentele care alcatuiesc mediul continuu si se supun legii actiunii si reactiunii.
Dintr-un alt punct de vedere, fortele pot fi ımpartite ın forte masice : f dm si forte desuprafata sau de contact : Tndσ . Fortele masice provin din prezenta mediilor materialeexterioare mediului considerat, sau din interactiunea elementelor materiale care compunmediul continuu. Aceste forte sunt proportionale cu marimea masei dm a particulei, iarforta f raportata la unitatea de masa este ın general functie de punct si de timp. Fortelede suprafata se exercita asupra elementelor suprafetei de separare dintre mediul consideratsi alte medii cu care el este ın contact, sau se datoresc actiunilor de contact exercitate pesuprafetele elementare de separare ale particulelor trasate imaginar ın interiorul mediului.Aceste forte sunt proportionale cu elementul de suprafata dσ pe care lucreaza si depind deorientarea elementului de suprafata, orientare caracterizata de normala n . Forta Tn care seexercita pe unitatea de suprafata poarta numele de tensiune sau efort unitar si este ıngeneral functie de punct si de timp.
Rezultanta fortelor care actioneaza asupra portiunii Dt delimitata de suprafata Σt vafi :
F =∫
Dt
f dm +∫
Σt
Tndσ =∫
Dt
ρ f dv +∫
Σt
Tndσ (6.26)
In aceste expresii figureaza doar forle exterioare, cele interioare anulandu-se reciproc ın bazaprincipiului actiunii si reactiunii. Trebuie observat ca tensiunile Tn desi sunt niste forteinterioare pentru corpul privit ın ansamblul sau, din punctul de vedere al domeniului materialDt ele sunt niste exterioare, deoarece se datoresc actiunilor de contact exercitate pe Σt decatre domeniile ınvecinate.
In mod analog, momentul rezultant al fortelor ın raport cu originea sistemului fix vafi :
MO =∫
Dt
(r× f) dm +∫
Σt
(r×Tn) dσ =∫
Dt
(r× ρ f) dv +∫
Σt
(r×Tn) dσ (6.27)
Teorema impulsului si teorema momentului cinetic pentru medii continue au for-mulari asemanatoare cu cele din dinamica sistemelor de puncte materiale, cu deosebireaesentiala ca se postuleaza ca formularile respective sunt locale , adica ele ısi pastreazavalabilitatea pentru orice portiune Dt delimitata de suprafata Σt a mediului :
d
dt
∫
Dt
ρv dv =∫
Dt
ρdv
dtdv =
∫
Dt
ρ f dv +∫
Σt
Tndσ ;dv
dt= a (6.28)
si :d
dt
∫
Dt
ρ (r× v) dv =∫
Dt
ρ
(r× dv
dt
)dv =
∫
Dt
(r× ρ f) dv +∫
Σt
(r×Tn) dσ (6.29)
unde s-a folosit (6.24) si proprietatea evidenta v × ρv = 0 .La aceste teoreme generale este ın general necesar sa se adauge primul principiu al
termodinamicii (teorema energiei) ın formulare locala, deoarece ın cursul miscarii si de-formarii mediilor materiale continue se produc schimburi de caldura atat ıntre elementele

6.2. TEORIA GEOMETRICA A MICILOR DEFORMATII 149
care alcatuiesc corpul, cat si cu mediul exterior. Aceste fenomene termice pot fi neglijate ınprima aproximatie doar ın cazul studiului corpurilor solide, pentru care deformatiile sunt ıngeneral mici si se produc suficient de lent.
Folosind expresiile (6.28) si (6.29) pot fi scrise direct si conditiile de echilibru . Mediulmaterial continuu va fi ın echilibru daca toate particulele materiale care ıl alcatuiesc suntın echilibru. Scriind ca vectorul de pozitie al fiecarei particule materiale ramane constant ıntimp (r = r0 , v = v0 = 0), rezulta ca sistemul este ın echilibru ın pozitia ın care la oricemoment t ≥ t0 sunt ındeplinite conditiile :
F =∫
Dt
ρ f dv +∫
Σt
Tndσ = 0 ; MO =∫
Dt
(r× ρ f) dv +∫
Σt
(r×Tn) dσ = 0 (6.30)
pentru orice domeniu Dt apartinand sistemului. Se stie ca daca F = 0 , atunci este suficientsa existe un punct oarecare O ın raport cu care MO = 0 , pentru ca M sa fie nul ın raportcu oricare alt punct al spatiului.
6.2 Teoria geometrica a micilor deformatii
Este examinata deplasarea mica a unei particule a mediului continuu. Dupa cum s-aaratat, o astfel de deplasare poate fi privita ca o transformare continua a domeniului D ınD ′ definita de ecuatiile :
r′ = r′(r, t) (6.31)
cu t fixat. Aceasta corespondenta punctuala ıntre punctele din D si cele din D ′ definesteatat un proces de deplasare a particulei ın ansamblul ei ca un rigid, cat si un procesde deformatie ın cursul careia se modifica atat distantele reciproce dintre puncte, cat siunghiurile dintre elementele liniare (v. Fig. 6.2). Pentru a introduce marimile cu ajutorulcarora poate fi caracterizata deformatia propriu-zisa a particulei, vor trebui separati dinexpresia generala a deplasarii termenii care se refera strict la procesul de deformatie pura,de cei care corespund deplasarii de corp rigid.
Figura 6.2: Deplasarea cu deformatie a particulei materiale

150 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
6.2.1 Vectorul deplasare
O deplasare a unui punct care initial ocupa pozitia M(r) si ulterior pozitia M ′(r′) va ficaracterizata cu vectorul deplasare :
u = r′ − r ; u = u(r, t) (6.32)
unde s-au folosit ecuatiile (6.31). Se observa ca vectorul deplasare al punctului M estefunctie de coordonatele initiale ale punctului si de timp, adica de variabilele lagrangeene (v.§ precedent unde aceste variabile au fost notate cu (r0, t)). In cele ce urmeaza vor fi luate ınconsiderare doar micile deplasari si deformatii ale particulei materiale, ceea ce ınseamnaca |u| este o marime infinitezimala, iar toti termenii care contin patrate sau produse dederivate ale componentelor deplasarii vor putea fi neglijati ın raport cu termenii liniari.
Se aleg doua puncte ale particulei, care initial ocupa pozitiile M(r) , respectiv N(r+δr) sicare ın urma unei deplasari infinitezimale vor trece ın pozitiile M ′(r′), respectiv N ′(r′+δr′) .Folosind Fig. 6.2 si ecuatia (6.32) se va putea scrie :
r′ = r + uM = r + u(r, t) (6.33)
respectiv :
r′ + δr′ = r + δr + uN =
= r + δr + u(r + δr, t) =
= r + δr + u(r, t) +3∑
k=1
∂u
∂xk
δxk =
= r + δr + u(r, t) + (δr · gradr)u (6.34)
unde din dezvoltarea ın serie Taylor au fost retinuti doar infinitii mici de ordinul ıntai.Utilizand (6.33) si (6.34) se poate calcula deplasarea relativa a punctului N ın raport cupunctul M :
uN − uM = δr′ − δr = d (δr) = (δr · gradr)u (6.35)
Proiectand aceasta relatie pe axele sistemului cartezian considerat, se obtine :
d (δxi) =3∑
k=1
∂ui
∂xk
δxk =3∑
k=1
(Ωki + εki) δxk ; i = 1, 2, 3 (6.36)
deoarece derivatele∂ui
∂xk
; i, k = 1, 2, 3 pot fi scrise ıntotdeauna sub forma unei sume dintre
componentele unui tensor antisimetric :
Ωki =1
2
(∂ui
∂xk
− ∂uk
∂xi
)= −Ωik ; i, k = 1, 2, 3 (6.37)
si ale unui tensor simetric :
εki =1
2
(∂ui
∂xk
+∂uk
∂xi
)= εik ; i, k = 1, 2, 3 (6.38)

6.2. TEORIA GEOMETRICA A MICILOR DEFORMATII 151
Deoarece un tensor antisimetric are doar trei elemente independente, se poate asociatensorului un (pseudo)vector, care conform (6.37) are componentele :
Ω23 =1
2(rotu)1 , Ω31 =
1
2(rotu)2 , Ω12 =
1
2(rotu)3 (6.39)
Efectuand notatia :
Ω (Ω23, Ω31, Ω12) =1
2rotu (6.40)
se va putea scrie ca :
3∑
k=1
Ωkiδxk = (Ω× δr)i ; i = 1, 2, 3 (6.41)
Pe de alta parte, introducand scalarul :
Ψ =3∑
i,k=1
εikδxiδxk (6.42)
se va putea scrie ca :
3∑
k=1
εkiδxk =1
2(gradδrΨ)i ; i = 1, 2, 3 (6.43)
Reunind rezultatele si ınlocuind ın (6.35), rezulta ın final :
uN = uM + Ω× δr +1
2gradδrΨ (6.44)
deci deplasarea mica a particulei materiale se compune dintr-o translatie rigida data devectorul uM , o rotatie rigida Ω× δr ın jurul unei axe care trece prin M si o deplasarelegata de deformarea particulei , adica de modificarea formei si volumului. In mod cores-punzator, tensorul avand elementele Ωki ; i, k = 1, 2, 3 poarta numele de tensor de rotatie ,tensorul avand elementele εki ; i, k = 1, 2, 3 poarta numele de tensor de deformatie , iar
vectorul1
2gradδrΨ reprezinta vectorul de deformatie .
6.2.2 Tensorul de deformatie
Tensorul de deformatie ısi justifica denumirea prin aceea ca cu ajutorul componentelorsale pot fi caracterizate modificarile distantelor reciproce dintre punctele corpului, precumsi variatiile unghiurilor dintre elementele liniare, ın urma procesului de deformatie.
Luand ın considerare elementul liniar MN de lungime δs , care dupa deformatie de-vine elementul M ′N ′ de lungime δs′ si notand cu n versorul directiei MN (v. Fig. 6.2),deformatia specifica liniara , sau lungire specifica , a unui element liniar, ın punctul Mdupa directia n , va fi numita expresia :
en =δs′ − δs
δs=
d (δs)
δs(6.45)

152 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
Pornind de la egalitatea evidenta (δs)2 = δr · δr , prin diferentiere rezulta :
δs d (δs) = δr · d (δr) =3∑
i=1
δxi d (δxi) =3∑
i,k=1
∂ui
∂xk
δxiδxk =3∑
i,k=1
εikδxiδxk (6.46)
deoarece3∑
i,k=1
Ωkiδxiδxk = 0 . Impartind rezultatul cu (δs)2 , rezulta ca :
en =3∑
i,k=1
εiknink unde ni =δxi
δs; i = 1, 2, 3 (6.47)
si ni ; i = 1, 2, 3 reprezinta cosinusii directori ai versorului n . Daca en > 0 avem de a facecu o alungire , iar daca en < 0 avem de a face cu o scurtare a elementului liniar respectiv.Daca ın particular MN ‖ Ox1 , atunci n1 = 1 , n2 = n3 = 0 si ın consecinta :
e1 = ε11 (6.48)
adica, componenta ε11 a tensorului de deformatie va caracteriza lungirea specifica a unuielement liniar care initial era paralel cu axa Ox1 . Interpretari analoage pot fi date si pentrucelelalte elemente diagonale ε22 si ε33 .
Figura 6.3: Lunecarea specifica la deplasarea cu deformatie a particulei materiale
Pentru a gasi semnificatia elementelor nediagonale ale tensorului de deformatie, va trebuistabilita ın prealabil o relatie ıntre unghiurile formate de doua elemente liniare date, ınaintesi dupa deformatie. Notand cu θ unghiul dintre doua elemente liniare avand versorii n si mınainte de deformatie si cu θ′ unghiul dintre aceleasi elemente dupa deformatie, deformatiaspecifica unghiulara , sau lunecarea specifica , va fi numita diferenta :
θnm = θ − θ′ (6.49)
Folosind notatiile din Fig. 6.3, se va putea scrie :
δr ·∆r = δs ∆s cos θ =3∑
i=1
δxi ∆xi (6.50)

6.2. TEORIA GEOMETRICA A MICILOR DEFORMATII 153
respectiv :
δr′ ·∆r′ = δs′ ∆s′ cos θ′ =3∑
i=1
[ δxi + d(δxi) ] [ ∆xi + d(∆xi) ] =
=3∑
i=1
δxi∆xi +3∑
i=1
δxid(∆xi) +3∑
i=1
∆xid(δxi) +3∑
i=1
d(δxi)d(∆xi)︸ ︷︷ ︸0
=
=3∑
i=1
δxi∆xi +3∑
i,k=1
εikδxi∆xk +3∑
i,k=1
εikδxk∆xi =
=3∑
i=1
δxi∆xi + 23∑
i,k=1
εikδxi∆xk (6.51)
unde s-a folosit relatia (6.36) si s-a neglijat termenul mic de ordinul doi. In final rezulta ca :
δs′ ∆s′ cos θ′ = δs ∆s cos θ + 23∑
i,k=1
εikδxi∆xk (6.52)
Folosind pentru cosinusii directori ai normalelor notatiile obisnuite :
ni =δxi
δs, mi =
∆xi
∆s; i = 1, 2, 3 (6.53)
si observand ca :
δs′
δs= 1 +
3∑
i,k=1
εiknink ,∆s′
∆s= 1 +
3∑
i,k=1
εikmimk (6.54)
din (6.52) rezulta expresia care permite calcularea lunecarii specifice :
cos θ′ = cos(θ − θnm) =
cos θ + 23∑
i,k=1
εiknimk
1 +
3∑
i,k=1
εiknink
1 +
3∑
i,k=1
εikmimk
' cos θ + 2
3∑
i,k=1
εiknimk
(6.55)unde s-a tinut cont de faptul ca ın aproximatia micilor deformatii, deformatiile specifice
sunt mici fata de unitate. Daca ın particular MN ‖ Ox1 si MP ‖ Ox2 , atunci θ =π
2si
n1 = 1 , n2 = n3 = 0 si m2 = 1 , m1 = m3 = 0 , deci :
sin θ12 = 2 ε12 (6.56)
Deoarece ın buna aproximatie sin θ12 ≈ θ12 , deformatiile fiind mici, rezulta ın final :
ε12 =1
2θ12 (6.57)
adica componenta ε12 reprezinta jumatatea variatiei unghiului drept dintre doua elementeliniare, care initial erau paralele cu axele Ox1 si Ox2 . Interpretari analoage pot fi date sipentru elementele nediagonale ε23 si ε31 ale tensorului de deformatie.

154 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
Cuadrica deformatiilor specifice
Revenind la expresia care permite calcularea deformarii specifice liniare a unui elementavand directia n care trece printr-un punct M al particulei :
en =δs′ − δs
δs=
d (δs)
δs=
3∑
i,k=1
εiknink (6.58)
se poate da o interpretare geometrica interesanta variatiei deformarii liniare specifice candsegmentul liniar considerat se roteste ın jurul lui M , adica cand variaza cosinusii directorini ; i = 1, 2, 3 . Pentru simplitatea calculelor, se alege originea sistemului de coordonateOx1x2x3 ın punctul M si se considera vectorul :
r =1ñ en
n (6.59)
Locul geometric al extremitatilor acestui vector, atunci cand n ia toate orientarile posibileın spatiu, se obtine eliminand parametrii variabili n1 , n2 , n3 ıntre ecuatiile (6.58) si (6.59).Rezulta suprafata avand ecuatia :
3∑
i,k=1
εikxixk = ± 1 (6.60)
care reprezinta cuadrica deformatiilor specifice liniare ın punctul M . Semnul din mem-brul drept este determinat de faptul ca avem de a face cu o alungire sau o scurtare si el sealege astfel ıncat cuadrica sa fie reala. Din (6.59) rezulta ca lungirea oricarui element liniarın M este invers proportionala cu patratul razei vectoare a cuadricei ın lungul elementuluiconsiderat, asa ıncat valorile extreme ale acestor lungiri se realizeaza pentru directiile datede axele cuadricei. Notand aceste axe cu Mx1, Mx2, Mx3 si raportand cuadrica (6.60) laaceste axe, rezulta ecuatia :
ε1x21 + ε2x
22 + ε3x
23 = ± 1 (6.61)
Axele Mxi ; i = 1, 2, 3 pentru care εik = 0 ; i 6= k poarta numele de axe principale dedeformatie , iar coeficientii ε1, ε2, ε3 se numesc deformatii specifice principale . Orto-gonalitatea reciproca a axelor Mxi ; i = 1, 2, 3 nu se modifica ın cursul deformatiei, deoarecepentru ele lunecarile specifice sunt nule.
Se pune problema de a gasi directiile axelor principale de deformatie, adica valorile co-sinusilor directori n1, n2, n3 ale acestor directii. Deoarece pentru aceste axe lungirile specificeliniare sunt extreme, problema se reduce la impunerea conditiilor necesare si suficiente deextremum cu legaturi pentru functia en(n1, n2, n3) , ecuatia legaturii fiind evident :
3∑
i=1
nini = 1 (6.62)
Introducand multiplicatorul necunoscut ε al lui Lagrange si definind functia :
F =3∑
i,k=1
εiknink + ε
(1−
3∑
i=1
nini
)(6.63)

6.2. TEORIA GEOMETRICA A MICILOR DEFORMATII 155
cosinusii directori cautati vor fi solutii ale sistemului de ecuatii :
1
2
∂F
∂ni
=3∑
k=1
(εik − ε δik) nk = 0 ; i = 1, 2, 3 (6.64)
Pentru ca acest sistem omogen sa admita solutii nebanale, va trebui ca determinantul sausa fie nul, adica :
det (εik − ε δik) = 0 ; i, k = 1, 2, 3 (6.65)
Rezulta astfel ecuatia :ε3 − S1 ε2 + S2 ε− S3 = 0 (6.66)
unde coeficientii S1, S2, S3 sunt dati de expresiile :
S1 = ε11 + ε22 + ε33
S2 =
∣∣∣∣∣ε11 ε12
ε21 ε22
∣∣∣∣∣ +
∣∣∣∣∣ε22 ε23
ε32 ε33
∣∣∣∣∣ +
∣∣∣∣∣ε33 ε31
ε13 ε11
∣∣∣∣∣S3 = det (εik)
(6.67)
Deoarece εik = εki ; i, k = 1, 2, 3 , ecuatia (6.66) are ın raport cu ε trei radacini reale sidistincte εj ; j = 1, 2, 3 , care se ınlocuiesc pe rand ın sistemul (6.64) . Se obtin astfel trei
sisteme de ecuatii care permit determinarea directiilor n(j)1 , n
(j)2 , n
(j)3 ; j = 1, 2, 3 pentru cele
trei axe principale de deformatie. In plus, cele trei valori ale parametrului ε reprezinta chiarmarimile deformatiilor specifice principale. Intr-adevar, ınmultind cu ni ; i = 1, 2, 3 ecuatiile(6.64), care au loc numai pentru axele principale, si ınsumand dupa i, rezulta :
en =3∑
i,k=1
εiknink = ε3∑
i=1
nini = ε (6.68)
Ecuatia (6.66) mai poate fi scrisa si sub forma :
(ε− ε1) (ε− ε2) (ε− ε3) = 0 (6.69)
adica :ε3 − (ε1 + ε2 + ε3) ε2 + (ε1ε2 + ε2ε3 + ε3ε1) ε− ε1ε2ε3 = 0 (6.70)
Rezulta astfel o alta forma pentru coeficientii S1, S2, S3, anume :
S1 = ε1 + ε2 + ε3
S2 = ε1ε2 + ε2ε3 + ε3ε1
S3 = ε1ε2ε3
(6.71)
Deoarece lungirile specifice sunt invariante la transformarile de coordonate, rezulta ca sicoeficientii S1, S2, S3 sunt niste invarianti, motiv pentru care ei sunt numiti invariantiistarii de deformatie . Cel mai important dintre acestia este invariantul S1 deoarece, dupacum se vedea mai jos, el reprezinta deformatia specifica de volum ıntr-o vecinatate suficientde mica a unui punct.

156 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
Se considera ın M un sistem de axe care coincide cu axele principale de deformatie si seconstruieste pe aceste axe un paralelipiped avand laturile δx1, δx2, δx3 . In urma deformatiei,paralelipipedul se transforma tot ıntr-un paralelipiped, care acum are laturile (1 + ε1) δx1,(1 + ε2) δx2, (1 + ε3) δx3 . Variatia relativa a volumului, notata de obicei cu ϑ va fi :
ϑ =δV ′ − δV
δV=
d(δV )
δV= (1 + ε1) (1 + ε2) (1 + ε3)− 1 ' ε1 + ε2 + ε3 = S1 (6.72)
unde s-au neglijat produsele de lungiri specifice ın raport cu unitatea si s-a tinut cont derelatia (6.71a). Avand ın vedere (6.67a), se obtine pentru deformatia specifica de volum ,numita si deformatie volumica , expresia :
ϑ = ε11 + ε22 + ε33 =3∑
i=1
∂ui
∂xi
= div u (6.73)
Daca ϑ > 0, atunci δV ′ > δV si avem de a face cu o dilatare , iar daca ϑ < 0, atunciδV ′ < δV si avem de a face cu o contractie . Daca ın vecinatatea oricarui punct al mediuluicontinuu :
ϑ = div u = 0 (6.74)
se spune ca mediul respectiv este incompresibil.
Ecuatiile lui Saint-Venant
Se observa ca daca se dau componentele deplasarii ui ; i = 1, 2, 3 , atunci ın fiecare punctal mediului continuu pot fi calculate deformatiile specifice (componentele distincte ale ten-sorului deformatiilor) cu formulele :
εik =1
2
(∂ui
∂xk
+∂uk
∂xi
); i, k = 1, 2, 3 (6.75)
Se poate ınsa pune si problema inversa, anume dandu-se componentele deformatiei εik ; i, k =1, 2, 3 , sa se gaseasca deplasarile ui ; i = 1, 2, 3 . In acest scop va trebui rezolvat sistemulde ecuatii cu derivate partiale (6.75) ın raport cu necunoscutele ui . Se remarca ınsa cadaca deformatiile sunt arbitrare, atunci acest sistem de sase ecuatii independente pentru treifunctii necunoscute nu este ın general compatibil. Pentru ca el sa fie compatibil, va trebuica deformatiile specifice εik sa ındeplineasca anumite conditii care reprezinta conditiile deintegrabilitate ale sistemului (6.75) si care poarta numele de conditii de compatibilitatepentru deformatii . Aceste conditii reprezinta un sistem de sase ecuatii care se obtin prineliminarea celor trei deplasari din formulele (6.75) si ele se pot ımparti ın doua grupe.
Prima ecuatie din primul grup de ecuatii se obtine derivand de doua ori pe ε11 ın raportcu cu x2 , apoi derivand de doua ori pe ε22 ın raport cu cu x1 si facand suma. Extinzandrezultatul prin permutari circulare, rezulta primul grup de trei ecuatii :
∂2εii
∂x2k
+∂2εkk
∂x2i
= 2∂2εik
∂xi∂xk
;
i = 1, 2, 3
k = 2, 3, 1(6.76)

6.2. TEORIA GEOMETRICA A MICILOR DEFORMATII 157
In continuare, deformatiile ε12 , ε23 , ε31 se deriveaza dupa cum urmeaza :
∂εik
∂xj
=1
2
(∂2ui
∂xk∂xj
+∂2uk
∂xi∂xj
);
i = 1, 2, 3
k = 2, 3, 1
j = 3, 1, 2
(6.77)
Din primele doua ecuatii se va scadea cea de a treia ecuatie, iar apoi ecuatia obtinuta se vaderiva ın raport cu x2 pentru a elimina pe u2 . Extinzand rezultatul prin permutari circulare,rezulta cel de al doilea grup de trei ecuatii :
∂
∂xk
(∂εik
∂xj
+∂εkj
∂xi
− ∂εji
∂xk
)=
∂2εkk
∂xi∂xj
;
i = 1, 2, 3
k = 2, 3, 1
j = 3, 1, 2
(6.78)
Ecuatiile (6.76) si (6.78) poarta numele de ecuatiile lui Saint-Venant . Se poate arataca daca aceste ecuatii nu sunt satisfacute de deformatiile date, atunci exista o incompatibi-litate nu numai matematica, ci si fizica, ıntre aceste deformatii, ın aceasta situatie aparandposibilitatea ca la deformare, fie sa se produca discontinuitati microscopice ın interiorul me-diului continuu, fie ca unele portiuni ale mediului sa patrunda ın spatiul ocupat de altele.Din acest motiv, ecuatiile lui Saint-Venant mai sunt numite si ecuatii de continuitatepentru deformatii .
6.2.3 Tensorul vitezelor de deformatie
Pana acum s-a presupus ca deplasarile raman mici chiar pentru valori relativ mari aletimpului. In caz contrar, de exemplu ın cazul fluidelor, numai pentru intervale de timp dtfoarte mici se poate considera ca deplasarile ui ; i = 1, 2, 3 raman mici. Pentru ca rezultateleobtinute sa-si pastreze valabilitatea, vor trebui ınlocuite deplasarile cu vidt ; i = 1, 2, 3 , undevi ; i = 1, 2, 3 sunt componentele vitezei de deplasare a particulei la momentul t . Astfeldeplasarea particulei ın timpul dt va fi proportionala cu dt . Tensorul rotatie si tensorul dedeformatie se vor transcrie ın forma :
Ωki = ωkidt , εki = vkidt ; i, k = 1, 2, 3 (6.79)
unde
ωki =1
2
(∂vi
∂xk
− ∂vk
∂xi
), vki =
1
2
(∂vi
∂xk
+∂vk
∂xi
); i, k = 1, 2, 3 (6.80)
Dupa cum tensorul Ωki ; k, i = 1, 2, 3 definea rotatia Ω , tensorul ωki ; k, i = 1, 2, 3 va definiviteza unghiulara ω a particulei considerata rigida :
ω =Ω
dt=
1
2rotv (6.81)
Tensorul vki ; k, i = 1, 2, 3 numit tensorul vitezelor de deformatie va defini vectorulviteza de deformatie care are componentele :
3∑
k=1
vkiδxk =1
2(gradδrΦ) ; i = 1, 2, 3 (6.82)

158 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
unde
Φ =3∑
i,k=1
vikδxiδxk (6.83)
Distributia vitezelor de deplasare ın vecinatatea unui punct M se obtine din formula(6.44) raportand fiecare termen la elementul de timp dt :
vN = vM + ω × δr +1
2gradδrΦ (6.84)
In legatura cu semnificatiile componentelor tensorului vki ; i, k = 1, 2, 3 pot fi reluateconsideratiile facute asupra componentelor tensorului εki ; i, k = 1, 2, 3 . Trebuie subliniatfaptul ca viteza de deformatie specifica de volum este egala cu divergenta campuluivitezelor :
θ =1
δV
d(δV )
dt= div v (6.85)
Daca mediul este incompresibil , atunci :
div v = 0 (6.86)
6.3 Tensorul tensiunilor
Tensiunile interioare sunt o consecinta a fortelor exterioare care deformeaza corpul, ınsensul ca daca un corp sufera o deformatie, atunci ın interiorul sau iau nastere forte care seopun deformarii. Admitand ca raza de actiune a fortelor intermoleculare este foarte mica, sepoate considera ın buna aproximatie ca aceste forte actioneaza pe elementele de suprafatacare separa doua parti adiacente ale corpului. Pentru a le caracteriza, presupunem ca mediul
Figura 6.4: Tensiunile interioare
continuu ın stare deformata este divizat ın doua portiuni D1 si D2 printr-o suprafata Σcare trece prin punctul M(r) (v. Fig. 6.4). In punctul M este aplicata normala n care

6.3. TENSORUL TENSIUNILOR 159
caracterizeaza orientarea elementului de suprafata dσ . Admitand ca sensul pozitiv alnormalei corespunde directiei orientate spre exteriorul lui D1 , portiunea D2 vaactiona asupra portiunii D1 pe elementul dσ cu forta Tndσ . Portiunea D1 va actiona peacelasi element de suprafata dσ asupra portiunii D2 cu forta T−ndσ , care conform legiiactiunii si reactiunii va trebui sa fie egala si opusa fortei Tndσ . In consecinta se va puteascrie ca :
T−n(r, t) = −Tn(r, t) (6.87)
Deoarece ın general vectorul Tn nu este normal la dσ , el poate fi descompus ıntr-o compo-nenta normala si una tangentiala . Tensiunea normala va fi pozitiva daca corespundeunui fenomen de ıntindere (tractiune) si negativa daca corespunde unui fenomen de com-presiune . Tensiunea tangentiala va fi pozitiva sau negativa ın functie de semnul lunecariispecifice.
Starea de tensiune ıntr-un punct M(r) poate fi caracterizata dupa cum urmeaza. PrinM(r) sunt trasate trei elemente plane ortogonale ıntre ele si totodata perpendiculare peaxele de coordonate, sensurile normalelor pozitive la aceste elemente fiind coliniare cu sen-
Figura 6.5: Caracterizarea starii de tensiune
surile pozitive ale axelor de coordonate. Notand cu Ti ; i = 1, 2, 3 vectorul tensiune asociatelementului plan normal la axa Oxi ; i = 1, 2, 3 si cu Ti1 , Ti2 , Ti3 , ; i = 1, 2, 3 componentelesale pe axele de coordonate, se va putea scrie :
T1 = T11e1 + T12e2 + T13e3
T2 = T21e1 + T22e2 + T23e3
T3 = T31e1 + T32e2 + T33e3
(6.88)
Astfel, ın orice punct M al mediului continuu se poate defini starea de tensiune cu ajutorulansamblului de noua numere Tik ; i, k = 1, 2, 3 , numite componentele tensiunii ın M .Primul indice va corespunde directiei normalei pozitive, iar cel de al doilea indice corespundeaxei ın lungul careia actioneaza componenta respectiva. Pentru i = k rezulta componentelenormale , iar pentru i 6= k rezulta componentele tangentiale . O imagine geometrica acomponentelor tensiunii se poate obtine considerand un cub elementar cu centrul ın M(r) sifetele paralele la planele de coordonate (v. Fig. 6.5).

160 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
In cazul unei orientari arbitrare n a elementului de suprafata dσ , vectorul tensiuneTn asociat elementului respectiv poate fi de asemenea exprimat cu ajutorul componentelortensiunii. In acest scop se construieste ın M(r) un tetraedru elementar, avand trei feteparalele la planele de coodonate, iar cea de a patra fata perpendiculara pe normala exterioara
Figura 6.6: Tetraedrul elementar ın M(r)
ın M(r) la dσ . Ecuatia de echilibru dinamic (principiul lui d’Alembert) a tetraedruluielementar are forma :
a dm = f dm + Tn dS −3∑
k=1
Tk dSk (6.89)
unde a este acceleratia tetraedrului, f este forta raportata la unitatea de masa, dS estearia fetei M1M2M3 , dSk ; k = 1, 2, 3 sunt ariile fetelor tetraedrului perpendiculare pe axeleMxk ; k = 1, 2, 3 si evident :
dSk = nk dS ; k = 1, 2, 3 (6.90)
unde nk ; k = 1, 2, 3 sunt cosinusii directori ai normalei n . De asemenea la scrierea ultimuluitermen din membrul drept al relatiei (6.89) s-a tinut cont de proprietatea (6.87). TensiuneaTn este aplicata pe fata oblica ıntr-un punct M∗(r∗) , iar tensiunile Tk sunt aplicate pecelelalte fete ale tetraedrului ın punctele M∗
k (r∗k) . Admitand ca aceste functii sunt conti-nue, primul termen din dezvoltarile ın serie Taylor ale acestor functii vor reprezenta valorilefunctiilor respective ın punctul M(r) , iar termenii urmatori vor fi niste infiniti mici. Intro-
ducand aceste dezvoltari ın (6.89), ımpartind cu dS si neglijand termenii mici (dm
dS' ρM
dV
dSeste un infinit mic de ordinul ıntai!) rezulta :
Tn =3∑
k=1
Tknk (6.91)
unde vectorii Tn si Tk ; k = 1, 2, 3 sunt aplicati ın M(r) . Proiectand ecuatia vectoriala(6.91) pe cele trei axe de coordonate, rezulta ecuatiile scalare :
Tni =3∑
k=1
Tkink ; i = 1, 2, 3 (6.92)

6.3. TENSORUL TENSIUNILOR 161
In consecinta, vectorul tensiune Tn ce actioneaza pe elementul de suprafata dσ de orientaren ın punctul M(r), este definit ın ıntregime de componentele tensiunii Tik ; i, k = 1, 2, 3 ınpunctul respectiv si de cosinusii directori ai normalei. Ecuatiile (6.91) si (6.92) sunt aplica-bile si ın punctele de pe suprafata exterioara a mediului continuu. In acest caz, marimileTni reprezinta sarcini exterioare care de obicei sunt date, ecuatiile amintite avand acumsemnificatia de conditii la limita sau conditii la suprafata .
Numerele Tki ; k, i = 1, 2, 3 alcatuiesc componentele unui tensor de ordinul doi numittensorul tensiunilor . Pentru a arata aceasta, se considera proiectia vectorului tensiuneTn pe directia lui n(n1, n2, n3) :
Tn · n =3∑
k,i=1
Tkinkni (6.93)
care este un scalar si deci invariant la o rotatie a sistemului de coordonate :
3∑
j,l=1
T ′jln
′jn′l =
3∑
k.i=1
Tkinkni (6.94)
Aici T ′jl ; j, l = 1, 2, 3 reprezinta componentele tensiunii ın sistemul de referinta rotit
Ox′1x′2x′3 , iar n′j ; j = 1, 2, 3 sunt noii cosinusi directori ai normalei n . Avand ın vedere
relatiile de transformare x′j =3∑
k=1
ajkxk unde ajk ; j, k = 1, 2, 3 sunt cosinusii directori ai noi-
lor axe ın raport cu vechile axe, precum si faptul ca nk ; k = 1, 2, 3 reprezinta componenteleversorului normalei n ın sistemul de referinta initial, se va putea scrie :
n′j =3∑
k=1
ajknk , nk =3∑
j=1
ajkn′j ; j, k = 1, 2, 3 (6.95)
Introducand ın (6.94) si tinand cont ca orientarea lui n este arbitrara, rezulta :
T ′jl =
3∑
k,i=1
ajkaliTki (6.96)
ceea ce arata ca componentele tensiunii definesc un tensor de ordinul doi. In plus, dupa cumse va arata ulterior, tensorul tensiunilor ın M(r) este simetric :
Tki = Tik ; i, k = 1, 2, 3 (6.97)
ceea ce ınseamna ca numai sase componente sunt independente, anume trei componentenormale si trei componente tangentiale care actioneaza pe cele trei fete ortogonale ıntre ele.
Cuadrica tensiunilor
Distributia tensiunilor ın mediul continuu poate fi studiata construind ın fiecare punctM(r) o suprafata numita cuadrica tensiunilor normale , sau simplu cuadrica lui Cau-chy . Componenta normala a vectorului tensiune Tn ce actioneaza pe elementul de suprafata

162 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
dσ de orientare n ın punctul M , conform relatiilor (6.91), (6.92) si (6.97) are expresia :
Tnn = Tn · n =3∑
i=1
Tnini =3∑
i=1
(3∑
k=1
Tkink
)ni =
3∑
i,k=1
Tiknink (6.98)
Daca Tnn > 0 avem de a face cu o ıntindere , iar daca Tnn < 0 avem o compresie . Seremarca asemanarea acestei formule cu expresia (6.47) pentru deformatia specifica liniara aunui element de directie n ce trece prin M . Alegand originea sistemului de coordonate ınM , se defineste vectorul :
r =1ñTnn
n (6.99)
si se pune problema gasirii locului geometric al extremitatii acestui vector atunci cand nor-mala n , si deci suprafata dσ , ia toate orientarile posibile ın spatiu. Eliminand din (6.98) si(6.99) parametrii variabili ni ; i = 1, 2, 3 se obtine suprafata de ecuatie :
3∑
i,k=1
Tikxixk = ± 1 (6.100)
unde semnul din membrul drept este ales dupa cum avem de a face cu o ıntindere sau cu ocompresiune, asa ıncat suprafata sa fie reala. Aceasta cuadrica are originea ın M si axelede simetrie rotite fata de axele sistemului Mx1x2x3 . Raportand cuadrica la axele sale desimetrie, ecuatia ei va fi :
T1x21 + T2x
22 + T3x
23 = ± 1 (6.101)
Astfel, exista un sistem de referinta Mx1x2x3 fata de care tensiunile tangentiale Tik ; i 6= ksunt nule si tensorul tensiunilor se reduce la diagonala sa principala. Axele de simetrieale cuadricii (6.101) poarta numele de directii principale de tensiune , iar tensiunilenormale corespunzatoare lor se numesc tensiuni normale principale T1 ≥ T2 ≥ T3 . Estede subliniat ca desi terminologia si rationamentele care urmeaza sunt asemanatoare cu celefolosite la analiza starii de deformatie, ın general directiile principale de tensiune nucoincid cu directiile principale de deformatie .
Caracterul distributiei tensiunilor ın punctul M depinde de semnele tensiunilor normaleprincipale. Daca T1 ≥ T2 ≥ T3 > 0 sau 0 > T1 ≥ T2 ≥ T3 , cuadrica este un elipsoid, semnullui 1 alegandu-se astfel ca elipsoidul sa fie real ; ın primul caz Tnn > 0 si deci componentanormala a tensiunii aplicate pe elementul de suprafata dσ ın punctul M va fi de ıntinderepentru orice orientare a elementului respectiv ; ın cel de al doilea caz Tnn < 0 si componentanormala a tensiunii ın M va fi de compresiune. Daca T1 ≥ T2 > 0 > T3 cuadrica va fi unhiperboloid cu una sau cu doua panze ın functie de semnul ales pentru 1 , cei doi hiperboloizi
fiind separati prin conul asimptotic de ecuatie3∑
i=1
Tix2i = 0 ; dupa cum extremitatea lui r
se gaseste pe primul sau pe cel de al doilea hiperboloid, componenta normala a tensiuniieste o ıntindere sau o compresiune. Daca T1 = 0 ; T2 6= 0 ; T3 6= 0 suprafata tensiunilordegenereaza ıntr-un cilindru si se spune ca ın M exista o stare de tensiune plana. DacaT1 = T2 = 0 ; T3 6= 0 suprafata tensiunilor degenereaza ın doua plane paralele. In fine,este evident ca situatia T1 = T2 = T3 = 0 corespunde cazului cand ın punctul M nu existatensiuni.

6.3. TENSORUL TENSIUNILOR 163
Figura 6.7: Cuadrica tensiunilor a lui Cauchy
Deoarece ın raport cu axele principale ale cuadricii lui Cauchy tensiunile tangentialesunt nule, iar tensiunile normale au valori extreme, pentru a determina directiile acestor axeprincipale (ın raport cu sistemul Mx1x2x3), adica directiile principale de tensiune, va trebuiimpusa conditia ca directia vectorului tensiune Tn sa coincida cu directia normalei n la dσ ,adica :
Tni = T ni =3∑
k=1
Tkink ; i = 1, 2, 3 (6.102)
unde T = |Tn| . Tinand cont de simetria tensorului tensiunilor, ecuatiile (6.102) devin :
3∑
k=1
(Tik − T δik) nk = 0 ; i = 1, 2, 3 (6.103)
Deoarece ın plus3∑
i=1
nini = 1 , avem la dispozitie un numar de patru ecuatii pentru determi-
narea necunoscutelor T , n1 , n2 , n3 . Sistemul algebric omogen (6.103) are solutii nebanalenumai daca determinantul sau este nul :
det (Tik − T δik) = 0 ; i, k = 1, 2, 3 (6.104)
ceea ce conduce la ecuatia de gradul trei :
T 3 − L1 T 2 + L2 T − L3 = 0 (6.105)
Matricea Tik ; i.k = 1, 2, 3 fiind simetrica, ecuatia (6.105) are ın raport cu T trei radacinireale care reprezinta chiar tensiunile normale principale Tj ; j = 1, 2, 3 . Inlocuind ın (6.103)pe rand pe T cu T1 , T2 , T3 vor fi obtinute directiile principale de tensiune definite cu cosinusiidirectori n
(j)1 , n
(j)2 , n
(j)3 ; j = 1, 2, 3 . Coeficientii L1 , L2 , L3 care intervin ın ecuatia (6.105)

164 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
sunt de forma binecunoscuta :
L1 = T11 + T22 + T33 = T1 + T2 + T3
L2 =
∣∣∣∣∣T11 T12
T21 T22
∣∣∣∣∣ +
∣∣∣∣∣T22 T23
T32 T33
∣∣∣∣∣ +
∣∣∣∣∣T33 T31
T13 T11
∣∣∣∣∣ = T1T2 + T2T3 + T3T1
L3 = det (Tik) = T1T2T3
(6.106)
Deoarece tensiunile normale principale T1 , T2 , T3 sunt invariante la transformarile de coodo-nate, coeficientii L1 , L2 , L3 vor constitui niste invarianti ai tensorului tensiunilor ın punctulconsiderat al mediului deformabil. Primul dintre acesti invarianti se mai noteaza si cu :
Θ =3∑
i=1
Tii = T1 + T2 + T3 (6.107)
Daca este cunoscuta suprafata tensiunilor ın punctul M , atunci cu ajutorul ei poate fideterminat grafic vectorul tensiune Tn care se exercita pe un element de suprafata dσ caretrece prin punctul respectiv. Astfel normala n la dσ va intersecta cuadrica ıntr-un punct
Figura 6.8: Determinarea grafica a vectorului tensiune Tn
N si deoarece ın aceste notatii MN = |r| , conform (6.99) rezulta ca valoarea componenteinormale a vectorului tensiune Tn va fi :
Tnn = ± 1
r2(6.108)
Pentru a afla directia lui Tn , se observa ca cu notatia
Ψ =3∑
i,k=1
Tikxixk (6.109)
rezulta :
Tn =1
2
√±Tnn · gradNΨ (6.110)
adica vectorul tensiune Tn are directia normalei la cuadrica ın punctul N . Construind ınN planul tangent la cuadrica si coborand de pe acest plan o perpendiculara care trece prinM , vectorul Tn se va situa pe aceasta perpendiculara.

6.4. ECUATIILE DE MISCARE ALE LUI CAUCHY 165
6.4 Ecuatiile de miscare ale lui Cauchy
Folosind teorema impulsului (6.28) care afirma ca miscarea mediului continuu are locastfel ıncat la orice moment t si pentru orice domeniu D al mediului deformabil delimitat desuprafata Σ va trebui ca : ∫
D
ρ a dv =∫
D
ρ f dv +∫
Σ
Tndσ (6.111)
poate fi dedusa ecuatia de miscare a particulei materiale . Aplicand teorema Gauss-Ostrogradski, care pentru un vector V(V1, V2, V3) stabileste ca :
∫
D
div V dv =∫
Σ
V · n dσ adica∫
D
3∑
k=1
∂Vk
∂xk
dv =∫
Σ
3∑
k=1
Vknkdσ (6.112)
pentru componenta i a ultimului termen din teorema impulsului rezulta :
∫
Σ
Tnidσ =∫
Σ
3∑
k=1
Tkinkdσ =∫
D
3∑
k=1
∂Tki
∂xk
dv ; i = 1, 2, 3 (6.113)
unde s-a folosit si ecuatia (6.92). In scriere vectoriala rezultatul devine :
∫
Σ
Tndσ =∫
D
3∑
k=1
∂Tk
∂xk
dv (6.114)
Introducand (6.114) ın ecuatia (6.111) si grupand toti termenii ıntr-un singur membru, re-zulta ca : ∫
D
[ρ (a− f)−
3∑
k=1
∂Tk
∂xk
]dv = 0 (6.115)
Presupunand ca toate functiile ce figureaza ın interiorul parantezei drepte sunt continuepentru orice D , conditia (6.115) poate fi satisfacuta numai daca :
a = f +1
ρ
3∑
k=1
∂Tk
∂xk
(6.116)
care reprezinta ecuatia de miscare , ın interiorul mediului continuu deformabil, pentru par-ticula materiala care are acceleratia a ın pozitia r(x1, x2, x3) . Proiectand ecuatia vectoriala(6.116) pe axe, rezulta ecuatiile lui Cauchy :
ai = fi +1
ρ
3∑
k=1
∂Tki
∂xk
; i = 1, 2, 3 (6.117)
Teorema momentului cinetic (6.29) aplicata la mediul care ocupa domeniul D deli-mitat de suprafata Σ :
∫
D
ρ (r× a) dv =∫
D
ρ (r× f) dv +∫
Σ
(r×Tn) dσ (6.118)

166 CAPITOLUL 6. MECANICA MEDIILOR CONTINUE DEFORMABILE
ın proiectie pe axe devine :∫
D
ρ (xiaj − xjai) dv =∫
D
ρ (xifj − xjfi) dv +∫
Σ
(xiTnj − xjTni) dσ ; i, j = 1, 2, 3 (6.119)
Tinand cont de (6.92) si folosind teorema Gauss-Ostrogradski, pentru ultimul termen dinmembrul drept al ecuatiei (6.119) se gaseste expresia :
∫
Σ
(xiTnj − xjTni) dσ =∫
Σ
3∑
k=1
(xiTkj − xjTki) nkdσ =∫
D
3∑
k=1
∂
∂xk
(xiTkj − xjTki) dv =
=∫
D
3∑
k=1
(xi
∂Tkj
∂xk
− xj∂Tki
∂xk
)dv +
∫
D
(Tij − Tji) dv ; i, j = 1, 2, 3
(6.120)
Introducand acest rezultat ın (6.119) si grupand termenii, rezulta :
∫
D
ρ
[xi
(aj − fj − 1
ρ
3∑
k=1
∂Tkj
∂xk
)− xj
(ai − fi − 1
ρ
3∑
k=1
∂Tki
∂xk
)]dv =
∫
D
(Tij − Tji) dv
; i, j = 1, 2, 3 (6.121)
Conform ecuatiilor lui Cauchy, membrul stang al acestor relatii este nul, deci :
Tij = Tji ; i, j = 1, 2, 3 (6.122)
S-a demonstrat astfel ca tensorul tensiunilor este simetric .
∗∗ ∗
Pana acum expunerea s-a limitat doar la o descriere analitica si geometrica a aspectelorcinematice si dinamice ale mediului continuu deformabil, fara a se insista asupra legaturilorposibile ıntre rezultatele obtinute si fara a formula problemele care apar ın mod obisnuit ınpractica.
Din punct de vedere principial, ın practica avem de a face cu doua clase mari de pro-bleme care se cer rezolvate : pe de o parte se cere sa se determine miscarea (sau echilibrul),pe de alta parte se cere sa se determine deformatiile si tensiunile. Este evident ca numarulecuatiilor avute la dispozitie pentru a rezolva astfel de probleme, anume ecuatiile lui Cauchy(6.117), ecuatia de continuitate, la care se adauga ecuatiile care definesc conditiile initialesi conditiile la limita (6.92), este mult mai mic decat numarul necunoscutelor pe care lecontin, asa ıncat pentru formularea rationala a unor probleme concrete, vor trebui introduseo serie de ipoteze restrictive suplimentare, sub forma unor ecuatii sau relatii care salege ıntre ele necunoscutele. In cele ce urmeaza, acest lucru va fi facut pentru doua tipuriparticulare de medii continue deformabile, anume pentru medii elastice si pentru mediifluide .
Deoarece ın fiecare punct al mediului deformatiile εik si tensiunile Tik ; i, k = 1, 2, 3reprezinta efecte ale acelorasi cauze, este natural sa se presupuna ca ıntre ele trebuie saexiste anumite relatii, care sa indice modul cum se comporta mediul din punct de vederemecanic. O astfel de relatie depinde de natura fizica a mediului si poarta numele de legeconstitutiva .
Capitolul 7
Ecuatiile mediilor elastice
7.1 Relatii dintre tensiuni si deformatii
In cazul unui corp omogen care suporta mici deformatii sub actiunea fortelor masicesi/sau a sarcinilor exterioare, ın fiecare punct al sau legea constitutiva care stabileste olegatura ıntre tensiuni si deformatii are forma generala :
Tik = Tik (ε11, ε22, ε33, ε23, ε31, ε12) , Tik = Tki ; i, k = 1, 2, 3 (7.1)
unde s-a tinut cont de faptul ca tensorul deformatiilor fiind simetric, are doar sase compo-nente independente.
Proprietatile elastice ale unui mediu sunt legate de comportarea sa dupa ındepartareafortelor care ıl deformeaza. Se spune despre un mediu continuu ca este elastic , daca dupaıncetarea actiunii deformatoare el revine la forma sa initiala. Pentru ca sa fie ındeplinitaaceasta conditie, va trebui ca relatiile (7.1) sa fie inversabile, adica ca :
0 6= ∂(T11,T22,T33,T23,T31,T12)
∂(ε11, ε22, ε33, ε23, ε31, ε12)< ∞ (7.2)
In felul acesta deformatia elastica este reversibila .In plus se admite existenta unui potential W care depinde numai de componentele ten-
sorului deformatiilor :W = W (ε11, ε22, ε33, ε23, ε31, ε12) (7.3)
numit potentialul elastic al lui Green , asa ıncat starea de tensiune sa derive din W cuformulele lui Green :
Tik =1
2(1 + δik)
∂W
∂εik
; i, k = 1, 2, 3 (7.4)
care se scriu dezvoltat :
T11 =∂W
∂ε11
, T22 =∂W
∂ε22
, T33 =∂W
∂ε33
T23 =1
2
∂W
∂ε23
, T31 =1
2
∂W
∂ε31
, T12 =1
2
∂W
∂ε12
(7.5)
167

168 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
Diferentiala totala a potentialului elastic se scrie sub forma :
dW =3∑
i,k=1i≤k
∂W
∂εik
dεik (7.6)
conditia impusa variatiei indicilor datorindu-se faptului ca potentialul elastic depinde nu-mai de sase variabile independente, tensorul deformatiilor fiind simetric. Tinand cont deformulele lui Green, se va putea scrie :
dW =3∑
i,k=1
Tik dεik (7.7)
de aceasta data ne mai existand restrictii privind variatiile indicilor de sumare. Ipotezaexistentei potentialului elastic este echivalenta cu afirmatia ca atunci cand corpul suferadeformatii elastice, lucrul mecanic al fortelor elastice trece integral ın energie potentialaacumulata ın corp, aceasta energie fiind restituita sub forma lucrului mecanic al fortelorelastice odata cu disparitia deformatiilor. Este presupus astfel implicit faptul ca procesulde deformatie are loc ıntr-un regim adiabatic . Privita din acest punct de vedere, expresia(7.7) reprezinta lucrul mecanic elementar specific de deformatie , lucru ce se poateverifica si direct.
7.1.1 Legea generalizata a lui Hooke
In cazul micilor deformatii ale corpurilor elastice omogene, se poate considera ın bunaaproximatie ca legea constitutiva (7.1) are o forma liniara ın fiecare punct al corpului, com-ponentele tensiunii Tik fiind functii liniare si omogene de componentele deformatiei εik :
Tik =3∑
j,l=1
Cik,jl εjl ; i, k = 1, 2, 3 (7.8)
Aceasta lege reprezinta o generalizare la corpuri de o forma oarecare a legii elementare alui Hooke conform careia, ıntre forta de tractiune F aplicata unui fir metalic de sectiune S
si lungirea sa specificaδl
lsub actiunea fortei respective, ın domeniul deformatiilor elastice,
exista relatia liniaraF
S= E
δl
l, unde E este un coeficient de proportionalitate numit mo-
dulul lui Young. Prin analogie, legea constitutiva (7.8) va fi numita legea generalizata alui Hooke , coeficientii Cik,jl ; i, k, j, l = 1, 2, 3 , independenti de punctul pentru care suntscrise ecuatiile (7.8), reprezentand modulii de elasticitate care caracterizeaza din punctde vedere mecanic proprietatile elastice ale mediului studiat.
Din modul cum sunt scrise ecuatiile (7.8) rezulta ca numarul total al modulilor de elas-ticitate este 34 = 81 . In realitate, cunoscand ca tensorii tensiunilor si deformatiilor suntsimetrici, numarul acestor moduli de elasticitate se reduce la 6 · 6 = 36 , deoarece existarelatiile :
Cik,jl = Cik,lj = Cki,jl = Cki,lj ; i, k, j, l = 1, 2, 3 (7.9)

7.1. RELATII DINTRE TENSIUNI SI DEFORMATII 169
Se mai observa ca prin ınlocuirea (7.8) ın (7.7) rezulta pentru potentialul elastic, abstractiefacand de o constanta aditiva, expresia :
W =1
2
3∑
i,k,j,l=1
Cik,jl εik εjl (7.10)
Deoarece W este un scalar, modulii de elasticitate vor trebui sa fie simetrici ın raport cupermutarea primei perechi de indici cu cea de a doua :
Cik,jl = Cjl,ik ; i, k, j, l = 1, 2, 3 (7.11)
Numarul acestor relatii fiind C26 = 15 , rezulta ın final ca modulii de elasticitate
independenti cu ajutorul carora pot fi caracterizate proprietatile mecanice ale unui corpelastic omogen sunt ın numar de 21 . Tinand cont de relatiile (7.9) si (7.11), formaexplicita a legii constitutive (7.8) va fi :
T11 = C11,11 ε11 + C11,22 ε22 + C11,33 ε33 + 2 C11,23 ε23 + 2 C11,31 ε31 + 2 C11,12 ε12
T22 = C11,22 ε11 + C22,22 ε22 + C22,33 ε33 + 2 C22,23 ε23 + 2 C22,31 ε31 + 2 C22,12 ε12
T33 = C11,33 ε11 + C22,33 ε22 + C33,33 ε33 + 2 C33,23 ε23 + 2 C33,31 ε31 + 2 C33,12 ε12
T23 = C11,23 ε11 + C22,23 ε22 + C33,23 ε33 + 2 C23,23 ε23 + 2 C23,31 ε31 + 2 C23,12 ε12
T31 = C11,31 ε11 + C22,31 ε22 + C33,31 ε33 + 2 C23,31 ε23 + 2 C31,31 ε31 + 2 C31,12 ε12
T12 = C11,12 ε11 + C22,12 ε22 + C33,12 ε33 + 2 C23,12 ε23 + 2 C31,12 ε31 + 2 C12,12 ε12
(7.12)
Daca materialul studiat este ınzestrat cu anumite proprietati de simetrie elastica, numarulmodulilor de elasticitate independenti scade si mai mult. Astfel, ın cazul ın care proprietatilemecanice ale unui corp elastic ısi pastreaza forma dupa directii simetrice fata de un plan, sespune ca corpul are un plan de simetrie elastica . Alegand planul x3 = 0 ca plan desimetrie elastica, rezulta ca trecand la sistemul de axe Ox′1x
′2x′3 cu ajutorul transformarii :
x′1 = x1 , x′2 = x2 , x′3 = − x3 (7.13)
va trebui ca legea generalizata a lui Hooke (7.8) sa se poata scrie ın forma :
T ′ik =
3∑
j,l=1
Cik.jl ε′jl ; i, k = 1, 2, 3 (7.14)
Tinand cont de regula de transformare a componentelor unui tensor, rezulta pentru com-ponentele tensorului deformatiilor si tensorului tensiunilor ın noul sistem de coordonate,expresiile :
ε′11 = ε11 ε′23 = − ε23
ε′22 = ε22 ε′31 = − ε31
ε′33 = ε33 ε′12 = ε12
si
T ′11 = T11 T ′
23 = −T23
T ′22 = T22 T ′
31 = −T31
T ′33 = T33 T ′
12 = T12
(7.15)
170 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
Scriind explicit ecuatiile (7.14) si tinand cont de transformatele (7.15) rezulta :
T11 = C11,11 ε11 + C11,22 ε22 + C11,33 ε33 − 2 C11,23 ε23 − 2 C11,31 ε31 + 2 C11,12 ε12
T22 = C11,22 ε11 + C22,22 ε22 + C22,33 ε33 − 2 C22,23 ε23 − 2 C22,31 ε31 + 2 C22,12 ε12
T33 = C11,33 ε11 + C22,33 ε22 + C33,33 ε33 − 2 C33,23 ε23 − 2 C33,31 ε31 + 2 C33,12 ε12
T23 = −C11,23 ε11 − C22,23 ε22 − C33,23 ε33 + 2 C23,23 ε23 + 2 C23,31 ε31 − 2 C23,12 ε12
T31 = −C11,31 ε11 − C22,31 ε22 − C33,31 ε33 + 2 C23,31 ε23 + 2 C31,31 ε31 − 2 C31,12 ε12
T12 = C11,12 ε11 + C22,12 ε22 + C33,12 ε33 − 2 C23,12 ε23 − 2 C31,12 ε31 + 2 C12,12 ε12
(7.16)
Se observa ca relatiile (7.12) si (7.16) pot avea loc simultan numai daca toti coeficientii carecontin indicele 3 de un numar impar de ori sunt nuli :
C11,23 = C11,31 = 0
C22,23 = C22,31 = 0 , C23,12 = 0 , C31,12 = 0
C33,23 = C33,31 = 0
(7.17)
Legea constitutiva pentru corpul cu planul de simetrie elastica x3 = 0 va contine un numarde 13 moduli de elasticitate independenti si va avea forma generala :
T11 = C11,11 ε11 + C11,22 ε22 + C11,33 ε33 + 2 C11,12 ε12
T22 = C11,22 ε11 + C22,22 ε22 + C22,33 ε33 + 2 C22,12 ε12
T33 = C11,33 ε11 + C22,33 ε22 + C33,33 ε33 + 2 C33,12 ε12
T23 = 2 C23,23 ε23 + 2 C23,31 ε31
T31 = 2 C23,31 ε23 + 2 C31,31 ε31
T12 = C11,12 ε11 + C22,12 ε22 + C33,12 ε33 + 2 C12,12 ε12
(7.18)
Presupunem ın plus ca si planul x1 = 0 este un plan de simetrie elastica. Trecand la sistemulde axa Ox′1x
′2x′3 cu ajutorul transformarii :
x′1 = − x1 , x′2 = x2 , x′3 = x3 (7.19)
transformatele componentelor tensorului deformatiilor si tensorului tensiunilor vor fi :
ε′11 = ε11 ε′23 = ε23
ε′22 = ε22 ε′31 = − ε31
ε′33 = ε33 ε′12 = − ε12
si
T ′11 = T11 T ′
23 = T23
T ′22 = T22 T ′
31 = −T31
T ′33 = T33 T ′
12 = −T12
(7.20)
Tinand cont de (7.20), legea constitutiva (7.14) se va scrie :
T11 = C11,11 ε11 + C11,22 ε22 + C11,33 ε33 − 2 C11,12 ε12
T22 = C11,22 ε11 + C22,22 ε22 + C22,33 ε33 − 2 C22,12 ε12
T33 = C11,33 ε11 + C22,33 ε22 + C33,33 ε33 − 2 C33,12 ε12
T23 = 2 C23,23 ε23 − 2 C23,31 ε31
T31 = − 2 C23,31 ε23 + 2 C31,31 ε31
T12 = −C11,12 ε11 − C22,12 ε22 − C33,12 ε33 + 2 C12,12 ε12
(7.21)

7.1. RELATII DINTRE TENSIUNI SI DEFORMATII 171
Ecuatiile (7.18) si (7.21) pot fi satisfacute simultan doar daca se anuleaza si restulcoeficientilor care contin indicele 1 de un numar impar de ori :
C11,12 = 0
C22,12 = 0 , C23,31 = 0
C33,12 = 0
(7.22)
Alaturand conditiile (7.17) si (7.22) se observa ca totodata trebuie sa fie nuli si toti coeficientiicare contin indicele 2 de un numar impar de ori. Aceasta ınseamna ca daca planele x3 = 0 six1 = 0 sunt plane de simetrie elastica, atunci si planul x2 = 0 trebuie sa fie tot un plan de si-metrie elastica. Corpurile care au trei plane de simetrie elastica reciproc perpendiculare suntnumite ortotrope . In concluzie, corpurile elastice omogene ortotrope sunt caracte-rizate de un numar de 9 moduli de elasticitate independenti , legea lor constitutivagenerala avand forma :
T11 = C11,11 ε11 + C11,22 ε22 + C11,33 ε33
T22 = C11,22 ε11 + C22,22 ε22 + C22,33 ε33
T33 = C11,33 ε11 + C22,33 ε22 + C33,33 ε33
T23 = 2 C23,23 ε23
T31 = 2 C31,31 ε31
T12 = 2 C12,12 ε12
(7.23)
In cazul unui corp izotrop , va trebui ca toate proprietatile mecanice sa fie aceleasi peorice directie ın jurul unui punct al corpului respectiv. Se porneste de la cazul corpului
ortotrop si se efectueaza o rotatie cuπ
2ın jurul axei Ox1 , ın urma careia coordonatele unui
punct devin :
x′1 = x1 , x′2 = x3 , x′3 = − x2 (7.24)
iar noile componente ale tensorilor deformatiilor si tensiunilor vor fi :
ε′11 = ε11 ε′23 = − ε23
ε′22 = ε33 ε′31 = − ε12
ε′33 = ε22 ε′12 = ε31
si
T ′11 = T11 T ′
23 = −T23
T ′22 = T33 T ′
31 = −T12
T ′33 = T22 T ′
12 = T31
(7.25)
Introducand (7.25) ın (7.14) si comparand ecuatiile obtinute cu (7.23), rezulta conditiilecare trebuie ındeplinite de modulii de elasticitate pentru ca corpul sa ramana cu aceleasiproprietati mecanice dupa noile directii :
C11,22 = C11,33 , C22,22 = C33,33 , C31,31 = C12,12 (7.26)
Repetand rationamentul pentru o rotatie cuπ
2ın jurul axei Ox2 , precizata de relatiile :
x′1 = − x3 , x′2 = x2 , x′3 = x1 (7.27)

172 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
si pentru care :
ε′11 = ε33 ε′23 = − ε12
ε′22 = ε22 ε′31 = − ε31
ε′33 = ε11 ε′12 = ε23
si
T ′11 = T33 T ′
23 = −T12
T ′22 = T22 T ′
31 = −T31
T ′33 = T11 T ′
12 = T23
(7.28)
se obtin conditiile :
C11,22 = C22,33 , C11,11 = C33,33 , C12,12 = C23,23 (7.29)
Rotatia cuπ
2ın jurul axei Ox3 nu va aduce nimic nou fata de conditiile (7.26) si (7.29).
Situatia discutata corespunde unui corp elastic care apartine unui sistem de simetriecubica . Deoarece :
C11,11 = C22,22 = C33,33 , C11,22 = C11,33 = C22,33 , C23,23 = C31,31 = C12,12 (7.30)
proprietatile elastice ale unui astfel de corp vor fi caracterizate cu un numar de trei modulide elasticitate independenti, legea sa constitutiva fiind :
T11 = C11,11 ε11 + C11,22 ε22 + C11,22 ε33
T22 = C11,22 ε11 + C11,11 ε22 + C11,22 ε33
T33 = C11,22 ε11 + C11,22 ε22 + C11,11 ε33
T23 = 2 C23,23 ε23
T31 = 2 C23,23 ε31
T12 = 2 C23,23 ε12
(7.31)
Efectuand o rotatie cu unghiulπ
4ın jurul axei Ox3 , pentru care :
x′1 =1√2
(x1 + x2) , x′2 = − 1√2
(x1 − x2) , x′3 = x3 (7.32)
noile componente ale tensorilor vor fi :
ε′11 =1
2(ε11 + ε22) + ε12
ε′22 =1
2(ε11 + ε22)− ε12
ε′33 = ε33
ε′23 =1√2
(ε23 − ε31)
ε′31 =1√2
(ε23 + ε31)
ε′12 =1
2(ε22 − ε11)
si
T ′11 =
1
2(T11 + T22) + T12
T ′22 =
1
2(T11 + T22)− T12
T ′33 = T33
T ′23 =
1√2
(T23 − T31)
T ′31 =
1√2
(T23 + T31)
T ′12 =
1
2(T22 − T11)
(7.33)

7.1. RELATII DINTRE TENSIUNI SI DEFORMATII 173
Introducand (7.33) ın (7.14), ın urma calculelor rezulta :
T11 =1
2(C11,11 + C11,22 + 2 C23,23) ε11 +
1
2(C11,11 + C11,22 − 2 C23,23) ε22 + C11,22 ε33
T22 =1
2(C11,11 + C11,22 − 2 C23,23) ε11 +
1
2(C11,11 + C11,22 + 2 C23,23) ε22 + C11,22 ε33
T33 = C11,22 ε11 + C11,22 ε22 + C11,11 ε33 (7.34)
T23 = 2 C23,23 ε23
T31 = 2 C23,23 ε31
T12 = (C11,11 − C11,22) ε12
Comparand ecuatiile (7.34) cu (7.31), rezulta ca pentru ca proprietatile mecanice sa ramanaaceleasi fata de noile directii, va trebui ca :
C23,23 =1
2(C11,11 − C11,22) (7.35)
In consecinta, proprietatile elastice ale unui corp omogen si izotrop sunt caracte-rizate de doi moduli de elasticitate independenti , notati de obicei cu :
λ = C11,22 , µ = C23,23 (7.36)
si cunoscuti sub numele de constantele elastice ale lui Lame . Legea constitutiva a unuicorp elastic omogen si izotrop se va scrie :
T11 = λ (ε11 + ε22 + ε33) + 2 µ ε11
T22 = λ (ε11 + ε22 + ε33) + 2 µ ε22
T33 = λ (ε11 + ε22 + ε33) + 2 µ ε33
T23 = 2 µ ε23
T31 = 2 µ ε31
T12 = 2 µ ε12
(7.37)
sau ıntr-o scriere condensata :
Tik = λϑ δik + 2 µ εik ; i, k = 1, 2, 3 (7.38)
unde ϑ =3∑
j=1
εjj = ε11 + ε22 + ε33 reprezinta deformatia specifica de volum . Ecuatiile
(7.38) sunt cunoscute si sub numele de legea generalizata a lui Hooke pentru corpurielastice omogene si izotrope, ın ipoteza micilor deformatii.
Insumand primele trei ecuatii (7.37) se poate obtine o relatie ıntre primul invariant al ten-
sorului tensiunilor Θ =3∑
j=1
Tjj = T11 + T22 + T33 si invariantul ϑ al tensorului deformatiilor :
Θ = (3 λ + 2 µ) ϑ (7.39)

174 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
In ipoteza 3 λ + 2 µ 6= 0 , ceea ce se poate realiza ıntotdeauna pentru orice material, rezulta :
ϑ =1
3 λ + 2 µΘ (7.40)
Tinand cont de aceasta relatie, legea lui Hooke se mai poate scrie ın forma :
εik = − λ
2 µ (3 λ + 2 µ)Θ δik +
1
2 µTik ; i, k = 1, 2, 3 (7.41)
De obicei la scrierea legii lui Hooke ın forma (7.41) sunt utilizate constantele elasticetehnice ale materialului ν si E . Facand identificarile :
λ
2 µ (3 λ + 2 µ)=
ν
E,
1
2 µ=
1 + ν
E(7.42)
legea lui Hooke (7.41) devine :
εik =1
E[(1 + ν) Tik − ν Θ δik] ; i, k = 1, 2, 3 (7.43)
legaturile dintre constantele elastice tehnice si constantele elastice ale lui Lame rezultanddin (7.42):
E =µ (3 λ + 2 µ)
λ + µ, ν =
λ
2 (λ + µ)(7.44)
O consecinta importanta a legii lui Hooke (7.38) sau (7.43) consta ın faptul ca ıntr-un corp elastic omogen si izotrop, ın orice punct al sau, directiile principale dedeformatie coincid cu directiile principale de tensiune . Intr-adevar, presupunandpentru simplitate ca ın punctul respectiv axele de coordonate Ox1 , Ox2 , Ox3 sunt axeprincipale de deformatie, atunci deoarece lunecarile specifice pentru aceste axe sunt nule :εik = 0 ; i 6= k ; i, k = 1, 2, 3 , din (7.38) rezulta ca si tensiunile tangentiale corespunzatoaresunt nule : Tik = 0 ; i 6= k ; i, k = 1, 2, 3 , ceea ce ınseamna ca axele respective sunt totodatasi directii principale de tensiune. Reciproca este evidenta. In aceasta situatie legea lui Hookeva exprima legatura dintre deformatiile specifice principale si tensiunile normale principale :
Ti = λ ϑ + 2 µ εi sau εi =1
E[(1 + ν) Ti − ν Θ] ; i = 1, 2, 3 (7.45)
7.1.2 Constante elastice fundamentale
Semnificatiile fizice ale constantelor elastice pot fi gasite examinand cateva stari de ten-siune elementare.
a. Intinderea sau compresiunea simpla. Presupunem ca ıntr-un corp este realizatastarea de tensiune :
T11 = T , T22 = T33 = T23 = T31 = T12 = 0 (7.46)

7.1. RELATII DINTRE TENSIUNI SI DEFORMATII 175
unde T = const . Se observa ca ın lipsa fortelor masice sunt satisfacute identic ecuatiile de
echilibru deduse din ecuatiile lui Cauchy ai = fi +1
ρ
3∑
k=1
∂Tki
∂xk
; i = 1, 2, 3 . Legea lui Hooke
(7.43) conduce la starea de deformatie :
ε11 =1
ET , ε22 = ε33 = − ν
ET , ε23 = ε31 = ε12 = 0 (7.47)
Deoarece componentele deformatiei sunt niste constante, ele vor satisface banal ecuatiile decompatibilitate ale lui Saint-Venant.
Figura 7.1: Cilindru circular drept supus la tensiuni longitudinale egale si opuse
Un model simplu de corp pentru care se poate realiza starea (7.46) si (7.47) ıl reprezinta
un cilindru drept finit avand axa Ox1 . Conditiile la limita Tni =3∑
k=1
Tkink ; i = 1, 2, 3 ın
acest caz au forma :
Tn1 = T n1 , Tn2 = Tn3 = 0 (7.48)
Deoarece pe suprafata laterala Sl a cilindrului n1 = 0 , iar pe cele doua baze B avem n1 = ± 1 ,se va putea scrie :
Tn
∣∣∣Sl
= 0 ; Tn1
∣∣∣B
= ±T , Tn2
∣∣∣B
= Tn3
∣∣∣B
= 0 (7.49)
In consecinta suprafata laterala a cilindrului este libera de sarcini, iar bazele sunt supuseunor tensiuni repartizate uniform, egale si opuse. Daca T > 0 , cilidrul sufera o ıntinderelongitudinala ın cursul careia acesta se alungeste, iar sectiunea sa transversala se micsoreaza(ε11 > 0 , ε22 = ε33 < 0). Daca ınsa T < 0 , cilidrul sufera o comprimare longitudinala ıncursul careia acesta se scurteaza, iar sectiunea sa transversala se mareste (ε11 < 0 , ε22 =ε33 > 0). Se observa ca indiferent de situatie, din (7.47) rezulta ıntotdeauna ca :
E > 0 , ν > 0 (7.50)
rezultatele fiind valabile pentru orice material elastic. Tot din (7.47) rezulta semnificatiile
constantelor elastice E si ν . Deoarece E =T
ε11
reprezinta raportul dintre tensiunea de
ıntindere longitudinala si alungirea longitudinala, constanta E poarta numele de mo-dul de elasticitate longitudinala , cunoscut si ca modulul lui Young . Deoarece

176 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
ν =|ε22||ε11| =
|ε33||ε11| reprezinta raportul dintre contractia transversala si alungirea longitudi-
nala, constanta ν poarta numele de modul de contractie transversala , cunoscut si subnumele de coeficientul lui Poisson .
b. Forfecarea simpla. Se considera un corp pentru care este realizata starea detensiune :
T23 = T , T11 = T22 = T33 = T31 = T12 = 0 (7.51)
unde T = const . Si ın acest caz, ın lipsa fortelor masice, starea considerata este o stare deechilibru. Starea de deformatie rezulta din legea lui Hooke :
ε23 =1 + ν
ET =
1
2µT , ε11 = ε22 = ε33 = ε31 = ε12 = 0 (7.52)
Ca model de corp pentru care se realizeaza starea (7.51) si (7.52) se poate alege uncub cu fetele paralele la planele de coordonate. Tinand cont de (7.51) conditiile la limita
Tni =3∑
k=1
Tkink ; i = 1, 2, 3 se scriu explicit :
Tn1 = 0 , Tn2 = T n3 , Tn3 = T n2 (7.53)
Se observa ca fetele normale la axa Ox1 sunt libere de tensiuni, deoarece pentru acestefete n1 = ± 1 , n2 = n3 = 0 si deci tensiunile corespunzatoare Tn sunt nule. In schimbcelelalte fete nu sunt libere de tensiuni. Astfel, pe fetele normale la axa Ox2 avem n2 = ± 1 ,n1 = n3 = 0 si deci Tn3 = ±T , Tn1 = Tn2 = 0 , iar pe fetele normale la axa Ox3 avemn3 = ± 1 , n1 = n2 = 0 si deci Tn2 = ±T , Tn1 = Tn3 = 0 (v. Fig. 7.2). Semnificatia
constantei µ rezulta din (7.52). Deoarece µ =T
2 ε23
, adica constanta µ reprezinta raportul
dintre tensiunea tangentiala T si deformatia unghiulara (lunecarea) θ23 = 2 ε23 pe careaceasta o provoaca, ea este numita modul de elasticitate transversala sau modul deforfecare .
Figura 7.2: Cub supus la tensiuni tangentiale egale si opuse
c. Compresiunea uniforma. Presupunem ca starea de tensiune este data de sistemulde valori :
Tik = − p δik , p > 0 (7.54)

7.1. RELATII DINTRE TENSIUNI SI DEFORMATII 177
In absenta fortelor masice, ecuatiile de echilibru vor fi de asemenea satisfacute identic. Din
formulele Tni =3∑
k=1
Tkink ; i = 1, 2, 3 rezulta :
Tni = − p ni ; i = 1, 2, 3 (7.55)
adica vectorul tensiune este dirijat ıntotdeauna dupa normala la suprafata. O astfel de stareeste numita stare de compresiune uniforma (hidrostatica) . Starea de deformatie vafi data de legea lui Hooke (7.43) unde Θ = T11 + T22 + T33 = − 3 p si se ia ın considerare(7.44) :
ε11 = ε22 = ε33 = − p1− 2 ν
E= − p
3 λ + 2 µ, ε23 = ε31 = ε12 = 0 (7.56)
Avand ın vedere ca ϑ = ε11 + ε22 + ε33 , din (7.56) rezulta :
p = −(λ +
2
3µ
)ϑ (7.57)
Deoarece pentru p > 0 trebuie ca ϑ < 0 , corpul suferind o compresiune, rezulta ca :
K = λ +2
3µ > 0 (7.58)
Constanta K poarta numele de modul de compresiune uniforma (hidrostatica) .Tinand cont de definitia (7.58), legea lui Hooke (7.38) pentru corpurile elastice omogenesi izotrope se mai poate scrie si sub forma :
Tik = 2 µ(εik − 1
3ϑ δik
)+ K ϑδik ; i, k = 1, 2, 3 (7.59)
Constantele elastice E , ν , µ , K sunt denumite constante elastice fundamentale , eleavand semnificatiile precizate anterior.
Pronind de la observatia ca constantele E , ν , K sunt toate pozitive, se poate arata usorca si constantele lui Lame λ si µ sunt de asemenea pozitive pentru orice material. Intr-adevar, rezolvand ecuatiile (7.44) (sau (7.42)), unde se presupune ca λ + µ > 0 , ın raportcu λ si µ se obtine :
λ =ν E
(1 + ν) (1− 2 ν), µ =
E
2 (1 + ν)(7.60)
Inlocuind aceste expresii ın (7.58) mai rezulta :
K =E
3 (1− 2 ν)(7.61)
Deoarece E > 0 si K > 0 , va trebui ca 1 − 2 ν > 0 , adica ν <1
2. Insa deoarece ν > 0 ,
pentru orice material va trebui sa fie ındeplinita conditia :
0 < ν <1
2(7.62)
Tinand seama de (7.62), din (7.60) rezulta evident :
λ > 0 , µ > 0 (7.63)

178 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
7.2 Ecuatiile de miscare si de echilibru ale mediului
elastic
Pana acum a fost efectuat doar un studiu local care permitea determinarea starii desolicitare ıntr-un punct oarecare al mediului continuu, fara a se tine seama de conditiileın care aceasta se produce, anume de sarcinile exterioare care actioneaza asupra mediului,precum si de conditiile ın care acesta se gaseste la un moment dat. Daca ınsa ne referim lao problema concreta de miscare (sau de echilibru) a unui corp cu proprietati elastice bineprecizate, studiul local va trebui completat cu un studiu global , care sa faca legatura ıntrecorpul considerat si celelalte corpuri la orice moment, luand ın considerare si miscarea sa laun moment dat. Cu alte cuvinte, pentru a preciza solutia problemei, va trebui sa se tina contsi de conditiile la frontiera care separa corpul de restul corpurilor ınconjuratoare, precum side conditiile initiale.
Limitand studiul la un mediu omogen, izotrop, liniar elastic, supus la o stare de deformatieinfinitezimala, ın fiecare punct al mediului si la orice moment vor trebui determinate unnumar de 15 functii necunoscute , anume trei deplasari ui ; i = 1, 2, 3 , sase deformatii spe-cifice εik ; i, k = 1, 2, 3 si sase tensiuni Tik ; i, k = 1, 2, 3 . Dintre ecuatiile avute la dispozitieın acest scop amintim ın primul rand ecuatiile de miscare ale particulei materiale apartinandmediului continuu :
ρ f +3∑
k=1
∂Tk
∂xk
= ρ a (7.64)
unde fortele masice f sunt presupuse cunoscute. Tinand cont ca vectorul de pozitie r alparticulei la un moment dat t este legat de vectorul de pozitie r0 al aceleiasi particule lamomentul initial prin relatia :
r = r0 + u(r0, t) (7.65)
unde u(r0, t) este vectorul de deplasare al particulei, care depinde de coordonatele lagran-geene, folosind pentru viteza si acceleratie definitiile cunoscute, rezulta :
v =dr
dt=
∂r(r0, t)
∂t=
∂u
∂t, a =
dv
dt=
∂2r(r0, t)
∂t2=
∂2u
∂t2(7.66)
Cu aceasta observatie ecuatia (7.64), echivalenta cu trei ecuatii scalare, se scrie :
ρ fi +3∑
k=1
∂Tki
∂xk
= ρ∂2ui
∂t2; i = 1, 2, 3 (7.67)
De asemenea sunt cunoscute ın fiecare punct relatiile care leaga componentele deformatieide componentele deplasarii :
εik =1
2
(∂ui
∂xk
+∂uk
∂xi
); i, k = 1, 2, 3 (7.68)
precum si relatiile dintre componentele deformatiei si cele ale tensiunii pentru corpul elasticomogen si izotrop (legea generalizata a lui Hooke) :
Tik = λϑ δik + 2 µ εik , ϑ =3∑
j=1
εjj = div u ; i, k = 1, 2, 3 (7.69)

7.2. ECUATIILE DE MISCARE SI DE ECHILIBRU ALE MEDIULUI ELASTIC 179
Deoarece tensorii tensiunilor si deformatiilor sunt simetrici, ecuatiile (7.68) si (7.69) suntfiecare ın numar de sase. Considerand ca marimile λ , µ , ρ sunt niste constante fizice datepentru mediul studiat, se observa ca numarul ecuatiilor avute la dispozitie este egal cunumarul functiilor necunoscute. Ecuatiile (7.67), (7.68), (7.69) alcatuiesc sistemul funda-mental de ecuatii al teoriei elasticitatii liniare.
Pentru ca sistemul de ecuatii (7.67), (7.68), (7.69) sa admita o solutie unica , el vatrebui completat cu conditiile initiale :
ui
∣∣∣∣∣t=t0
= ϕi(x01, x
02, x
03) ,
∂ui
∂t
∣∣∣∣∣t=t0
= ψi(x01, x
02, x
03) ; i = 1, 2, 3 (7.70)
unde functiile ϕi , ψi ; i = 1, 2, 3 sunt date pe domeniul ocupat de corp la momentul initial,precum si cu conditiile la limita care exprima comportarea solutiei sistemului pe frontieraexterioara a corpului. Acestea din urma pot fi de mai multe tipuri, dupa cum pe frontiera S0 ,care delimiteaza corpul elastic la momentul t0 , sunt date pentru orice t > t0 fie deplasarile,fie tensiunile, fie pe anumite portiuni deplasarile si pe celelalte portiuni tensiunile. Acesteconditii la limita nu pot fi ın ıntregime arbitrare, deoarece ele trebuie sa satisfaca la teoremaimpulsului si teorema momentului cinetic, scrise pentru corpul considerat ın ansamblul sau.
Problema determinarii starii de solicitare a unui corp elastic aflat ın echilibru poate firezolvata ın mod analog, cu unica deosebire ca acum deplasarile ui ; i = 1, 2, 3 nu mai depindde timp. In acest caz membrul drept al ecuatiilor (7.67) va fi nul, impunerea conditiilorinitiale nu va mai avea sens, iar conditiile la limita pot fi formulate asemanator ca ın cazulproblemei dinamice.
In functie de tipul conditiilor la limita folosite, problemele dinamice si statice ale teorieielasticitatii pot fi rezolvate mai usor daca se aleg drept necunoscute fundamentale fie numaideplasarile, fie numai tensiunile, celelalte necunoscute urmand a fi eliminate ıntre cele 15ecuatii amintite mai sus. In modul acesta suntem condusi fie la o rezolvare ın deplasari ,fie la o rezolvare ın tensiuni a acestor probleme. In cele ce urmeaza va fi prezentata pelarg doar prima metoda.
Folosind legea generalizata a lui Hooke (7.69), ın ecuatiile (7.67) pot fi ınlocuite tensiunileprin deformatii specifice :
ρ fi +3∑
k=1
∂
∂xk
(λϑ δki + 2 µ εki) = ρ fi + λ∂ϑ
∂xi
+ 2 µ3∑
k=1
∂εki
∂xk
= ρ∂2ui
∂t2; i = 1, 2, 3 (7.71)
In continuare, folosind (7.68) pot fi ınlocuite derivatele deformatiilor specifice prin expresiilelor ın functie de deplasari :
3∑
k=1
∂εki
∂xk
=1
2
3∑
k=1
∂
∂xk
(∂ui
∂xk
+∂uk
∂xi
)=
1
2
3∑
k=1
∂2ui
∂x2k
+1
2
∂
∂xi
(3∑
k=1
∂uk
∂xk
)=
=1
2∆ ui +
1
2
∂ϑ
∂xi
; i = 1, 2, 3 (7.72)
cu
3∑
k=1
∂2ui
∂x2k
= ∆ ui = div grad ui ; i = 1, 2, 3 si3∑
k=1
∂uk
∂xk
= div u = ϑ (7.73)

180 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
unde ∆ este operatorul lui Laplace. Folosind aceste rezultate, ecuatiile de miscare (7.71)devin :
µ ∆ ui + (λ + µ)∂ϑ
∂xi
+ ρ fi = ρ∂2ui
∂t2; i = 1, 2, 3 (7.74)
Vectorial, ecuatiile au forma generala :
µ ∆u + (λ + µ) grad div u + ρ f = ρ∂2u
∂t2(7.75)
si poarta numele de ecuatiile lui Lame . S-a obtinut astfel un sistem de trei ecuatiidiferentiale cu derivate partiale de ordinul doi, liniar si cu coeficienti constanti, care pentruconditii initiale si la limita bine precizate, permite determinarea deplasarilor ui ; i = 1, 2, 3 .Odata cunoscute deplasarile, folosind ecuatiile (7.68) si (7.69) pot fi aflate relativ usor com-ponentele deformatiilor si tensiunilor.
Daca conditiile la limita sunt exprimate prin tensiuni, iar problema este rezolvata ındeplasari, atunci apare utila exprimarea acestor conditii la limita ın raport cu deplasarile.In acest scop se foloseste observatia ca ın fiecare punct de pe frontiera va trebui ca :
T eni =
3∑
k=1
Tki nk ; i = 1, 2, 3 (7.76)
unde T eni reprezinta componentele sarcinilor exterioare date aplicate pe unitatea de suprafata
a unui element avand orientarea n(n1, n2, n3) apartinand frontierei exterioare a corpului, iarTik ; i, k = 1, 2, 3 sunt componentele tensorului tensiunilor interioare corespunzatoare. Avandın vedere ecuatiile (7.69) si (7.68), conditiile la limita (pe suprafata) se vor scrie sub forma :
T eni =
3∑
k=1
(λ ϑ δki + 2 µ εki) nk = λ ϑni + µ3∑
k=1
(∂ui
∂xk
+∂uk
∂xi
)nk =
= λ ϑni + µ∂ui
∂n+ µ
3∑
k=1
∂uk
∂xi
nk ; i = 1, 2, 3 (7.77)
In calcule s-a tinut cont de definitia derivatei unei functii ϕ(x1, x2, x3) dupa o directie deversor n(n1, n2, n3) :
∂ϕ
∂n= n · grad ϕ =
3∑
k=1
∂ϕ
∂xk
(n · ek) =3∑
k=1
∂ϕ
∂xk
nk (7.78)
In ceea ce priveste rezolvarea unei probleme de elasticitate ın tensiuni, amintim doar caaceasta trebuie facuta cu anumite precautii, deoarece la ecuatiile (7.67) vor trebui adaugateconditiile de compatibilitate pentru tensiuni. Acestea din urma se obtin pornind de laconditiile de compatibilitate pentru deformatii, ın care deformatiile sunt ınlocuite prin ex-presiilor lor ın functie de tensiuni, date de legea lui Hooke.
Aplicatii
1. Sa se studieze starea de deformare a unui cilindru circular drept suspendat cu un fir fixatın centrul bazei sale superioare. Cilindrul se afla sub influenta fortei de greutate proprie.

7.2. ECUATIILE DE MISCARE SI DE ECHILIBRU ALE MEDIULUI ELASTIC 181
Rezolvare : Asupra unitatii de masa actioneaza forta f(0, 0,− g). Se presupune ca se reali-zeaza urmatoarea stare de tensiune :
T33 = α x3 , T11 = T22 = T23 = T31 = T12 = 0 (1)
Din ecuatiile de echilibru
ρ fi +3∑
k=1
∂Tki
∂xk
= 0 ; i = 1, 2, 3 (2)
va rezulta α = ρg , deci :T33 = ρgx3 (3)
Folosind legea generalizata a lui Hooke :
εik =1
E[(1 + ν) Tik − ν Θ δik] ; i, k = 1, 2, 3 (4)
unde Θ = T11 + T22 + T33 va rezulta starea de deformatie :
ε11 = ε22 = − νρg
Ex3 , ε33 =
ρg
Ex3 , ε23 = ε31 = ε12 = 0 (5)
Se verifica direct ca componentele (5) satisfac ecuatiile de compatibilitate ale lui Saint-Venant.
Avand ın vedere conditiile la limita Tni =3∑
k=1
Tki nk , care ın acest caz devin :
Tn1 = Tn2 = 0 , Tn3 = T33 n3 = ρgx3 · n3 (6)
rezulta ca suprafata laterala a cilindrului (n3 = 0), precum si baza sa inferioara (x3 = 0) suntlibere de sarcini, iar baza superioara (n3 = +1) este supusa unei tensiuni uniform repartizateρgl > 0 care corespunde unei ıntinderi.
Ecuatiile pentru deplasarile u1, u2, u3 rezulta folosind formulele generale :
εik =1
2
(∂ui
∂xk
+∂uk
∂xi
); i, k = 1, 2, 3 (7)
Tinand cont de (5) se obtin ecuatiile :
∂u1
∂x1
= − νρg
Ex3 ,
∂u2
∂x2
= − νρg
Ex3 ,
∂u3
∂x3
=ρg
Ex3 (8)

182 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
∂u1
∂x2
+∂u2
∂x1
= 0 ,∂u1
∂x3
+∂u3
∂x1
= 0 ,∂u2
∂x3
+∂u3
∂x2
= 0 (9)
Din ultima ecuatie (8) rezulta :
u3 =ρg
2Ex2
3 + f3(x1, x2) (10)
si atunci din ultimele doua ecuatii (9) obtinem :
u1 = − ∂f3
∂x1
x3 + f1(x1, x2) , u2 = − ∂f3
∂x2
x3 + f2(x1, x2) (11)
Vor trebui astfel determinate functiile f1 , f2 , f3 . Inlocuind (11) ın ecuatiile ramase, rezultaconditiile :
∂2f3
∂x21
=∂2f3
∂x22
=νρg
E,
∂2f3
∂x1∂x2
= 0 ,∂f1
∂x1
=∂f2
∂x2
= 0 ,∂f1
∂x2
+∂f2
∂x1
= 0 (12)
de unde obtinem :
f1 = ax2 + b , f2 = −ax1 + c , f3 =νρg
2E
(x2
1 + x22
)+ dx1 + ex2 + h (13)
Deplasarile vor fi date de expresiile :
u1 = − νρg
Ex1x3 − dx3 + ax2 + b
u2 = − νρg
Ex2x3 − ex3 − ax1 + c
u3 =ρg
2E
[ν
(x2
1 + x22
)+ x2
3
]+ dx1 + ex2 + h
(14)
In punctul de suspensie O′(0, 0, l) va trebui ca u1 = u2 = u3 =∂u1
∂x3
=∂u2
∂x3
=∂u3
∂x3
= 0 , asa ıncat
din (14) rezulta :
a = b = c = d = e = 0 , h = − ρg
2El2 (15)
In acest caz formulele pentru deplasari devin :
u1 = − νρg
Ex1x3 , u2 = − νρg
Ex2x3 , u3 =
ρg
2E
[ν
(x2
1 + x22
)+ x2
3 − l2]
(16)
Dupa cum era de asteptat, cilindrul se contracta pe directiile x1 si x2 (x3 > 0). O sectiune planaa cilindrului x3 = x0
3 va lua ın urma deformarii forma unui paraboloid de revolutie :
x3 = x03 + u3 =
[x0
3 +ρg
2E
(x0 2
3 − l2)]
+νρg
2E
(x2
1 + x22
)(17)

7.3. TORSIUNEA BARELOR CILINDRICE 183
7.3 Torsiunea barelor cilindrice
O problema clasica de echilibru a unui corp elastic omogen si izotrop o constituie de-terminarea starii de solicitare la torsiune a barelor cilindrice. Se considera un cilindru cugeneratoarele paralele la axa Ox3 si bazele situate ın planele x3 = 0 si x3 = h > 0 . Sepresupune ca fortele masice sunt neglijabile, iar suprafata laterala a cilindrului este libera desarcini. Singurele tensiuni sunt aplicate pe baze si ele sunt echivalente cu un cuplu aplicat ınsectiunea x3 = h , ın timp ce baza x3 = 0 a cilindrului este fixata. Se noteaza cu Me(0, 0,M e)momentul cuplului fortelor tangentiale exterioare si cu α unghiul presupus constant cu carese rasuceste un element de lungime ds paralel cu generatoarele si avand cota x3 = 1 . Bazainferioara a cilindrului fiind fixata, la ınaltimea x3 unghiul de rasucire va fi ε = α x3 .
Figura 7.3: Torsiunea unei bare cilindrice verticale
Deoarece nu se cunoaste distributia exacta a tensiunilor exterioare aplicate pe baze, cidoar cuplul datorat acestora, care are momentul rezultant Me, exista o libertate destul demare ın ceea ce priveste alegerea solutiei problemei. In functie de alegerea care se face, formasolutiei va fi precizata de obligativitatea ca ea sa satisfaca ecuatiile lui Lame scrise pentrucazul static :
µ ∆ ui + (λ + µ)∂ϑ
∂xi
+ ρ fi = 0 , fi ' 0 ; i = 1, 2, 3 (7.79)
si ın acelasi timp sa verifice conditiile la limita . Forma concreta a acestor conditii rezultadin datele problemei. Deoarece suprafata laterala este libera de sarcini, ınseamna ca ın oricepunct al ei va trebui sa avem :
Ten = 0 , n = n(n1, n2, 0) (7.80)
sau. deoarece T eni =
3∑
k=1
Tiknk ; i = 1, 2, 3 , conditiile pe suprafata laterala se mai scriu :
Ti1n1 + Ti2n2 = 0 ; i = 1, 2, 3 (7.81)
In ceea ce priveste conditiile la limita pe baze, se observa ca deoarece tensiunile exterioareaplicate pe baze sunt echivalente cu un cuplu al carui moment este orientat dupa axa Ox3 ,

184 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
va trebui ca ın orice punct situat pe baze :
Ten = Te
n(T en1, T
en2, 0) , n = n(0, 0, 1) (7.82)
unde
T eni =
3∑
k=1
Tiknk = Ti3 ; i = 1, 2 (7.83)
Deoarece rezultanta unui sistem de forte echivalent cu un cuplu este nula :∫
B
Ten dσ = 0 (7.84)
folosind (7.83) rezulta ca pe baze vor trebui sa fie ındeplinite conditiile :∫
B
T13 dσ = 0 ,∫
B
T23 dσ = 0 (7.85)
In plus, momentul rezultant al acestor forte fiind dat, va trebui ca :
M e = (Me)3 =∫
B
(r×Ten) dσ =
∫
B
(x1Te
n2 − x2Te
n1) dσ =∫
B
(x1T23 − x2T13) dσ (7.86)
Ecuatiile (7.85) si (7.86) vor reprezenta conditiile la limita care trebuie sa fie ındeplinite desolutia problemei pe bazele cilindrului. In cele de mai sus au fost discutate doar conditiile lalimita care se impun pe baza superioara. Acestea pot fi scrise usor si pentru baza inferioara,ınsa deoarece ın acest caz cuplul are momentul −Me, iar n = n(0, 0,−1), rezultatele vor fiidentice cu cele deduse mai sus.
Figura 7.4: Rasucirea unei sectiuni plane
Cu aceste precizari se poate trece la rezolvarea problemei enuntate. Pentru ınceput seface ipoteza ca sectiunile plane, paralele cu bazele, raman plane si dupa rasucire .Se considera o sectiune plana R situata la ınaltimea x3 si un punct P (x1, x2, x3) situatpe sectiunea respectiva. In urma rasucirii, sectiunea R se roteste cu unghiul ε ın jurul axeiOx3 , iar punctul P trece ın punctul P ′(x′1, x
′2, x
′3). Relatiile dintre noile coordonate si vechile
coordonate ale punctului respectiv vor fi :
x′1 = r cos(θ + ε) = x1 cos ε− x2 sin ε
x′2 = r sin(θ + ε) = x1 sin ε + x2 cos ε
x′3 = x3
unde
x1 = r cos θ
x2 = r sin θ
x3 = x3
(7.87)

7.3. TORSIUNEA BARELOR CILINDRICE 185
Limitandu-ne doar la cazul micilor deformatii, se poate presupune ca unghiul de rotatie εeste suficient de mic, asa ıncat cos ε ' 1 , sin ε ' ε . Formulele de transformare (7.87) devin :
x′1 = x1 − ε x2
x′2 = x2 + ε x1
x′3 = x3
(7.88)
Vectorul deplasare fiind definit ca u = r′ − r , din (7.88) rezulta pentru componentele saleexpresiile :
u1 = −α x2x3
u2 = α x1x3
u3 = 0
(7.89)
unde s-a tinut cont de presupunerea facuta ca unghiul de rotatie este proportional cu cotasectiunii : ε = α x3 .
Solutia (7.89) este o consecinta a ipotezei ca sectiunile raman plane si dupa rasucire,forma concreta a solutiei fiind determinata de obligativitatea ca ea sa satisfaca la ecuatiilelui Lame (7.79), precum si la conditiile la limita (7.81), (7.85), (7.86). Observand ca pentrusolutia (7.89) :
ϑ = div u =∂u1
∂x1
+∂u2
∂x2
+∂u3
∂x3
= 0 (7.90)
si deoarece s-a presupus ca fortele masice sunt neglijabile, ecuatiile lui Lame se reduc la :
∆ ui =∂2ui
∂x21
+∂2ui
∂x22
+∂2ui
∂x23
= 0 ; i = 1, 2, 3 (7.91)
Este evident ca aceste ecuatii sunt satisfacute de solutia (7.89).Inainte de a impune conditiile la limita, trebuie scrise expresiile pentru componentele
deformatiilor si tensiunilor. Cunoscand ca εik =1
2
(∂ui
∂xk
+∂uk
∂xi
), Tik = λϑ δik + 2 µ εik ,
i, k = 1, 2, 3 , folosind (7.89) rezulta :
ε11 = 0 ε23 =1
2α x1 T11 = 0 T23 = α µx1
ε22 = 0 ε31 = − 1
2α x2 si T22 = 0 T31 = −α µ x2
ε33 = 0 ε12 = 0 T33 = 0 T12 = 0
(7.92)
Conform conditiilor (7.81), ın orice punct de pe suprafata laterala a cilindrului va trebuica :
T11n1 + T12n2 = 0
T21n1 + T22n2 = 0
T31n1 + T32n2 = 0
(7.93)
Se observa ca primele doua ecuatii (7.93) sunt satisfacute automat de tensiunile (7.92b). Inceea ce priveste ecuatia (7.93c), deoarece aceasta conditie nu contine pe x3 , va fi suficient

186 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
ca ea sa fie satisfacuta pe conturul C care delimiteaza sectiunea R din planul x3 = const .Notand cu β unghiul dintre normala de versor n ıntr-un punct oarecare al conturului C siaxa Ox1 (v. Fig 7.5), deoarece :
n1 = cos(n, e1) = cos β , n2 = cos(n, e2) = cos(
π
2− β
)= sin β (7.94)
conditia (7.93c) devine :x1 sin β − x2 cos β = 0 (7.95)
Aceasta este satisfacuta daca punctul de pe conturul C are coordonatele x1 = R cos β ,x2 = R sin β , adica daca cilindrul considerat este un cilindru circular cu raza R .
In ceea ce priveste conditiile pe baze (7.85), se poate arata usor ca ele sunt satisfacute
de tensiunile (7.92b) deduse pe baza solutiei (7.89). Intr-adevar, observand ca∂T31
∂x1
= 0 si
∂T23
∂x2
= 0 , conditia (7.85a) se mai scrie :
∫
B
T31 dσ =∫
B
[T31 + x1
(∂T31
∂x1
+∂T23
∂x2
)]dσ =
∫
B
[∂(x1T31)
∂x1
+∂(x1T23)
∂x2
]dσ (7.96)
Folosind formula integrala a lui Gauss-Ostrogradski∫
D
(∂V1
∂x1
+∂V2
∂x2
+∂V3
∂x3
)dv =
∫
Σ
(V1 n1 + V2 n2 + V3 n3) dσ , V = V(V1, V2, V3) (7.97)
care pentru un domeniu plan Σ delimitat de conturul C devine :∫
Σ
(∂V1
∂x1
+∂V2
∂x2
)dσ =
∮
C
(V1 n1 + V2 n2) ds (7.98)
expresia (7.96), unde V1 = x1T31 si V2 = x1T23 , se scrie ın continuare :∫
B
T31 dσ =∮
C
[(x1T31) n1 + (x1T23) n2] ds = α µ∮
C
x1 (x1 sin β − x2 cos β) ds (7.99)
unde C este conturul bazei superioare B a cilindrului. Integrala obtinuta este nula deoarecesi conturul C trebuie sa fie tot un cerc de raza R pe care este ındeplinita conditia (7.95). Inmod analog se poate demonstra ca tensiunile (7.92b) verifica conditia (7.85b).
Conditia la limita (7.86) permite determinarea constantei de rasucire α . DeoareceM e este dat, iar µ este un parametru de material de asemenea presupus cunoscut, din (7.86)si (7.92b) rezulta :
M e =∫
B
(x1T23 − x2T31) dσ = α µ∫
B
(x2
1 + x22
)dσ ≡ α D (7.100)
unde D este o marime numita rigiditate la torsiune . Folosind coordonate polare, pentruD se obtine expresia :
D = µ∫
B
∫ (x2
1 + x22
)dx1dx2 = µ
R∫
0
2π∫
0
r2 ∂(x1, x2)
∂(r , θ)dr dθ = µ
R∫
0
2π∫
0
r3dr dθ =πµR4
2(7.101)

7.3. TORSIUNEA BARELOR CILINDRICE 187
Inlocuind rezultatul ın (7.100), rezulta pentru α expresia :
α =M e
D=
2 M e
πµR4(7.102)
In concluzie, pornind de la ipoteza ca sectiunile transversale plane raman plane si dupadeformatie, poate fi rezolvata doar problema rasucirii barelor cilindrice cu sectiune circu-lara , starea de solicitare fiind data de relatiile (7.89) si (7.92) ın care α are expresia dinformula (7.102).
Pentru a rezolva problema rasucirii barelor cilindrice avand sectiunea de o forma oare-care , va trebui sa se renunte la ipoteza prea restrictiva facuta anterior. In cele ce urmeazase va presupune ca sectiunile transversale plane se deformeaza ın urma torsiunii, ınsa elese deformeaza identic independent de pozitia lor fata de baza inferioara x3 = 0. Aceastarevine la a cauta o solutie de forma :
u1 = −α x2x3
u2 = α x1x3
u3 = α ϕ(x1, x2)
(7.103)
unde ϕ(x1, x2) este functia de torsiune care trebuie determinata astfel ıncat solutia (7.103)sa satisfaca ecuatiile lui Lame (7.79), precum si conditiile la limita (7.81), (7.85), (7.86).
Neglijand fortele masice si avand ın vedere ca si ın acest caz ϑ = div u = 0 , ecuatiilelui Lame se reduc la ∆ ui = 0 ; i = 1, 2, 3 . Se observa ca pentru i = 1, 2 aceste ecuatii suntsatisfacute de solutia (7.103), iar pentru i = 3 va trebui ca functia ϕ(x1, x2) sa satisfacaecuatia :
∆ ϕ =∂2ϕ
∂x21
+∂2ϕ
∂x22
= 0 (7.104)
adica functia de torsiune trebuie sa fie o functie armonica pe orice sectiune transversala R abarei cilindrice.
Componentele deformatiilor si tensiunilor se vor calcula ın acelasi mod ca ın cazul ante-rior, rezultand expresiile :
ε11 = 0 ε23 =α
2
(∂ϕ
∂x2
+ x1
)T11 = 0 T23 = α µ
(∂ϕ
∂x2
+ x1
)
ε22 = 0 ε31 =α
2
(∂ϕ
∂x1
− x2
)si T22 = 0 T31 = α µ
(∂ϕ
∂x1
− x2
)
ε33 = 0 ε12 = 0 T33 = 0 T12 = 0
(7.105)
Din impunerea conditiilor la limita (7.93) pe suprafata laterala a cilindrului, rezulta ca peconturul C care delimiteaza o sectiunea transversala R va trebui ca sa fie ındeplinita relatia :
(∂ϕ
∂x1
− x2
)n1 +
(∂ϕ
∂x2
+ x1
)n2 = 0 (7.106)
adica :∂ϕ
∂x1
n1 +∂ϕ
∂x2
n2 = x2n1 − x1n2 ≡ f(x1, x2) (7.107)

188 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
deci :∂ϕ
∂n= f(x1, x2) (7.108)
Aici∂ϕ
∂nreprezinta derivata functiei de torsiune ϕ dupa normala exterioara ıntr-un punct al
conturului C (v. (7.78)) .Din ecuatiile (7.104) si (7.108) rezulta ca pentru determinarea functiei de torsiune ϕ va
trebui rezolvata o problema cunoscuta din teoria potentialului ca fiind de tip Neumann,conform careia se cere sa se gaseasca o functie armonica pe domeniul R atunci cand secunoaste derivata functiei respective pe directia normalei la conturul C al lui R . Dupacum se arata ın teoria potentialului, solutia problemei Neumann exista daca este satisfacutaconditia : ∮
C
∂ϕ
∂nds = 0 (7.109)
In acest caz functia ϕ este determinata pana la o valoare constanta arbitrara care ınsa, ıncazul problemei examinate, determina doar o translatie rigida ın lungul axei Ox3 , starea detensiune a corpului ramanand nemodificata (v. (7.103c) ın care ϕ se ınlocuieste cu ϕ+const.).
Figura 7.5: Conturul C al unei sectiuni transversale a barei cilindrice
Se poate verifica usor ca ın cazul studiat conditia (7.109) este ındeplinita. Intr-adevar,alegand ca sens de parcurgere al conturului C pe acela care lasa interiorul la stanga (v. Fig.7.5) si notand cu τ versorul tangentei ıntr-un punct al conturului C , rezulta :
n1 = cos β = cos(n, e1) = cos(τ , e2) =dx2
ds
n2 = sin β = cos(n, e2) = − cos(τ , e1) = − dx1
ds
(7.110)
Folosind (7.107), conditia (7.109) devine :∮
C
∂ϕ
∂nds =
∮
C
(∂ϕ
∂x1
n1 +∂ϕ
∂x2
n2
)ds =
=∮
C
(x2n1 − x1n2) ds =∮
C
(x1dx1 + x2dx2) =∮
C
d[1
2
(x2
1 + x22
)]= 0
(7.111)

7.3. TORSIUNEA BARELOR CILINDRICE 189
deoarece integrala pe un contur ınchis a unei diferentiale totale exacte este nula. Inconsecinta, determinarea formei functiei ϕ(x1, x2) din datele concrete ale problemei esteposibila.
Referitor la conditiile la limita pe baze, se verifica printr-un procedeu analog cu celanterior, ca conditiile (7.85) sunt verificate de tensiunile (7.105b). De exemplu, pentruconditia (7.85a) se obtine :
∫
B
T31 dσ =∮
C
x1 [T31n1 + T23n2] ds = α µ∮
C
x1
[(∂ϕ
∂x1
− x2
)n1 +
(∂ϕ
∂x2
+ x1
)n2
]ds =
= α µ∮
C
x1
[(∂ϕ
∂x1
n1 +∂ϕ
∂x2
n2
)− (x2n1 − x1n2)
]ds = (7.112)
= α µ∮
C
x1
[∂ϕ
∂n− f(x1, x2)
]ds = 0
rezultatul fiind nul ın baza conditiei (7.108) valabila si pe conturul bazei cilindrului.In fine, conditia (7.86) determina expresia constantei de rasucire α :
α =M e
D(7.113)
unde acum rigiditatea la torsiune D are expresia :
D =1
α
∫
B
(x1T23 − x2T31) dσ = µ∫
B
(x2
1 + x22 + x1
∂ϕ
∂x2
− x2∂ϕ
∂x1
)dσ (7.114)
care poate fi calculata daca se cunoaste functia de torsiune ϕ si daca se da forma lui B .Rigiditatea la torsiune D este o marime pozitiva. Pentru a arata acest lucru, se folosesteprima formula integrala a lui Green :
∫
D
(grad ϕ · grad ψ + ϕ ∆ ψ) dv =∫
Σ
ϕ∂ψ
∂ndσ (7.115)
care se transcrie pentru domeniul plan Σ delimitat de conturul C . Considerand ın plus caψ = ϕ , formula (7.115) devine :
∫
Σ
[(grad ϕ)2 + ϕ ∆ ϕ
]dσ =
∮
C
ϕ∂ϕ
∂nds (7.116)
Daca domeniul Σ reprezinta chiar baza B , iar ϕ(x1, x2) este functia de torsiune introdusamai sus, atunci tinand cont de ecuatia (7.104), expresia (7.116) devine :
∫
B
(∂ϕ
∂x1
)2
+
(∂ϕ
∂x2
)2 dσ =
∮
C
ϕ∂ϕ
∂nds (7.117)
Pe de alta parte, luand ın considerare conditia (7.108) rezulta :∮
C
ϕ∂ϕ
∂nds =
∮
C
ϕ (x2n1 − x1n2) ds =∫
B
[∂(ϕx2)
∂x1
− ∂(ϕx1)
∂ x2
]dσ =
∫
B
[x2
∂ϕ
∂x1
− x1∂ϕ
∂x2
]dσ
(7.118)

190 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
unde ın calcule s-a folosit formula (7.98). Introducand rezultatul ın (7.117) si grupandtermenii rezulta :
∫
B
(∂ϕ
∂x1
)2
+
(∂ϕ
∂x2
)2
+ x1∂ϕ
∂x2
− x2∂ϕ
∂x1
dσ = 0 (7.119)
Inmultind (7.119) cu µ si adunand rezultatul la (7.114), se obtine pentru D expresia :
D = µ∫
B
(∂ϕ
∂x1
− x2
)2
+
(∂ϕ
∂x2
+ x1
)2 dσ (7.120)
de unde rezulta ca ıntotdeauna valoarea calculata pentru D trebuie sa fie pozitiva.Calculele prezentate se simplifica ıntr-o oarecare masura, daca ın locul functiei de torsiune
este folosita functia de tensiune . Introducand functia armonica conjugata ψ(x1, x2) cuformulele lui Cauchy :
∂ϕ
∂x1
=∂ψ
∂x2
,∂ϕ
∂x2
= − ∂ψ
∂x1
(7.121)
se verifica usor ca aceasta satisface pe domeniul R o ecuatie similara cu (7.104) pentru functiade tensiune :
∆ ψ(x1, x2) = 0 (7.122)
ınsa conditia pe conturul C devine :
ψ − 1
2
(x2
1 + x22
)= const. (7.123)
Astfel, problema se transforma ıntr-o problema Dirichlet pentru domeniul R cu datele pefrontiera functii rationale.
Introducand prin definitie functia de tensiune :
Φ(x1, x2) = ψ(x1, x2)− 1
2
(x2
1 + x22
)(7.124)
problema studiului torsiunii barelor drepte se reduce la o problema la limita de tip Dirichletpe R pentru functia Φ :
∆ Φ =∂2Φ
∂x21
+∂2Φ
∂x22
= − 2 (7.125)
cu conditia pe conturul C :Φ(x1, x2) = const. (= 0) (7.126)
Tensiunile tangentiale vor avea expresiile simple :
T23 = −α µ∂Φ
∂x1
, T31 = α µ∂Φ
∂x2
(7.127)
Valoarea momentului M e corespunzator unghiului relativ de torsiune α este data de formula :
M e =∫
B
(x1T23 − x2T31) dσ = −α µ∫
B
(x1
∂Φ
∂x1
+ x2∂Φ
∂x2
)dσ = 2 α µ
∫
B
Φ(x1, x2) dσ
(7.128)

7.3. TORSIUNEA BARELOR CILINDRICE 191
Deoarece
M e = α D (7.129)
rigiditatea la torsiune va avea expresia simpla :
D = 2 µ∫
B
Φ(x1, x2) dσ (7.130)
Aplicatii
1. O bara dreapta avand sectiunea sub forma unui triunghi echilateral cu latura a are bazainferioara fixata ıntr-un suport rigid, iar asupra bazei superioare actioneaza forte tangentialeexterioare echivalente cu un cuplu de moment M e. Cunoscand valoarea α a unghiului relativde torsiune, precum si cea a modulului µ de elasticitate transversala, sa se determine formafunctiei de tensiune ıntr-o sectiune transversala, tensiunea tangentiala maxima, precum si valoareacorespunzatoare a momentului M e. Se neglijeaza fortele masice.
Rezolvare : Alegand axa Ox1 ın lungul unei laturi a triunghiului si originea O ın mijlocullaturii respective, ecuatiile laturilor vor fi date de expresiile :
x2 − a√
3
2± x1
√3 = 0 , x2 = 0 (1)
Pe domeniul interior delimitat de ecuatiile (1), functia de tensiune Φ(x1, x2) va satisface la oecuatie de forma :
∂2Φ
∂x21
+∂2Φ
∂x22
= − 2 (2)
iar pe laturile triunghiului echilateral va trebui ındeplinita conditia :
Φ(x1, x2) = 0 (3)
Se cauta o solutie de forma :
Φ(x1, x2) = C · x2
(x2 − a
√3
2+ x1
√3
) (x2 − a
√3
2− x1
√3
)(4)
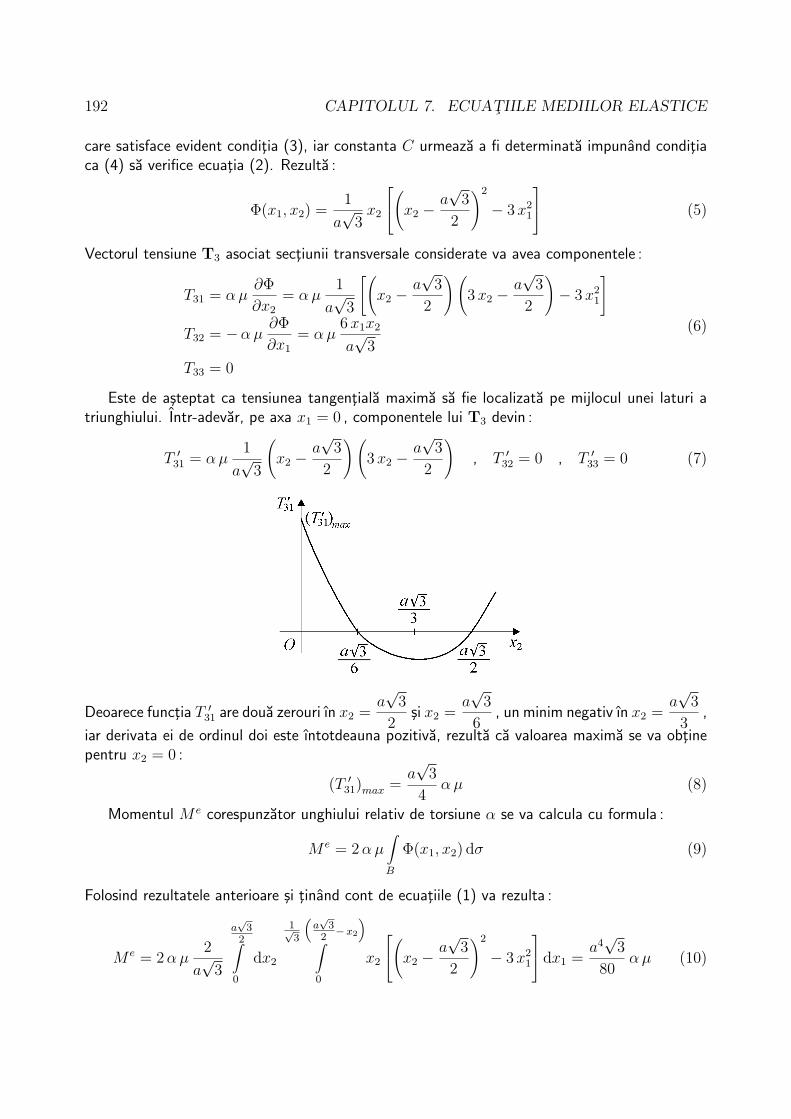
192 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
care satisface evident conditia (3), iar constanta C urmeaza a fi determinata impunand conditiaca (4) sa verifice ecuatia (2). Rezulta :
Φ(x1, x2) =1
a√
3x2
(x2 − a
√3
2
)2
− 3 x21
(5)
Vectorul tensiune T3 asociat sectiunii transversale considerate va avea componentele :
T31 = α µ∂Φ
∂x2
= α µ1
a√
3
[(x2 − a
√3
2
) (3 x2 − a
√3
2
)− 3 x2
1
]
T32 = −α µ∂Φ
∂x1
= α µ6 x1x2
a√
3
T33 = 0
(6)
Este de asteptat ca tensiunea tangentiala maxima sa fie localizata pe mijlocul unei laturi atriunghiului. Intr-adevar, pe axa x1 = 0 , componentele lui T3 devin :
T ′31 = α µ
1
a√
3
(x2 − a
√3
2
) (3 x2 − a
√3
2
), T ′
32 = 0 , T ′33 = 0 (7)
Deoarece functia T ′31 are doua zerouri ın x2 =
a√
3
2si x2 =
a√
3
6, un minim negativ ın x2 =
a√
3
3,
iar derivata ei de ordinul doi este ıntotdeauna pozitiva, rezulta ca valoarea maxima se va obtinepentru x2 = 0 :
(T ′31)max =
a√
3
4α µ (8)
Momentul M e corespunzator unghiului relativ de torsiune α se va calcula cu formula :
M e = 2 α µ∫
B
Φ(x1, x2) dσ (9)
Folosind rezultatele anterioare si tinand cont de ecuatiile (1) va rezulta :
M e = 2 α µ2
a√
3
a√
32∫
0
dx2
1√3
(a√
32−x2
)∫
0
x2
(x2 − a
√3
2
)2
− 3 x21
dx1 =
a4√
3
80α µ (10)

7.4. UNDE ELASTICE 193
7.4 Unde elastice
Un mediu elastic, izotrop si infinit se afla initial ın stare nedeformata. Daca printr-unprocedeu oarecare (un soc, o modificare locala a densitatii, etc.) se produce o perturbatieıntr-un punct sau ıntr-un domeniu al mediului elastic, atunci perturbatia respectiva se vapropaga cu viteza finita, punand ın miscare particulele mediului. Deplasarile particulelormediului vor fi descrise de ecuatiile lui Lame care, admitand ca fortele masice sunt neglijabile,se scriu :
µ ∆u + (λ + µ) grad div u = ρ∂2u
∂t2, f ' 0 (7.131)
Va fi cautata o solutie a acestor ecuatii de forma :
u(r, t) = a sin(ωt− k · r + ϕ) (7.132)
unde a si k sunt niste vectori constanti, ω o constanta pozitiva, iar ϕ de asemenea o constantapozitiva data. Inainte de a gasi conditiile ın care (7.132) poate fi o solutie a ecuatiilor (7.131),va fi examinata semnificatia fizica a solutiei cautate.
Se stie ca o ecuatie de tipul (7.132) descrie propagarea ın spatiu a oscilatiilor armonice
avand amplitudinea a si pulsatia ω = 2πν =2π
T. Intr-adevar, se alege un punct ın spatiu,
de exemplu originea r = 0 , ın care la momentul initial t = 0 particula are deplasarea :
u0 = a sin ϕ (7.133)
unde ϕ reprezinta faza initiala a miscarii ın origine. Miscarea de oscilatie a particulei ınjurul originii se va transmite particulelor ınvecinate care, mai devreme sau mai tarziu, vorıntra si ele ın oscilatie ın jurul pozitiilor corespunzatoare de echilibru r . Locul geometric altuturor punctelor r ın care, la un moment bine precizat t , particulele corespunzatoare auaceeasi faza ϕ , rezulta din ındeplinirea conditiei :
ωt− k · r + ϕ = ϕ (7.134)
adica :k · r = ωt (7.135)
Aceasta reprezinta, la momentul fixat t , ecuatia unui plan Pt (v. Fig. 7.6) a carui normalaeste vectorul constant k . Distanta acestui plan fata de origine va fi :
d = r · kk
=r · kk
=ω
kt = c t (7.136)
unde s-a facut notatia
c =ω
k> 0 (7.137)
Se observa ca aceeasi faza ϕ o aveau si particulele corespunzatoare punctelor apartinandplanului P0 , normal la vectorul k , care la momentul t = 0 trece prin origine. Totodata,deoarece a este un vector constant, ın toate punctele planelor P0 si Pt deplasarile particule-lor corespunzatoare vor fi aceleasi. Totul se ıntampla ca si cum miscarea din planul P0 s-ar

194 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
Figura 7.6: Propagarea ın timp a frontului undei plane
transmite planului Pt ın sensul lui k cu viteza c . Se spune ca miscarea (faza) s-a propa-gat ın lungul lui k cu viteza c prin unde plane . Miscarea ın timp a planului Pt se face
perpendicular pe vectorul constant k cu viteza c =ω
k. Planul Pt poarta numele de frontul
undei plane , el separand partea perturbata de partea neperturbata a mediului, iar viteza cse numeste viteza de propagare a oscilatiilor ın mediul considerat, sau viteza de faza .Scriind viteza de propagare c ın forma :
c =ω
k=
ω
2π
2π
k=
1
T
2π
k(7.138)
se poate defini marimea :
λ =2π
k= c T (7.139)
care poarta numele de lungime de unda , ea reprezentand distanta la care se propaga fazaoscilatiei ın lungul lui k dupa o perioada T .
Pentru a gasi conditiile ın care solutia cautata satisface ecuatiile lui Lame, se ınlocuieste(7.132) ın (7.131). In acest scop, folosind urmatoarele formule din analiza vectoriala :
div (ϕV) = ϕ div V + V grad ϕ , ∆V = div gradV = grad div V − rot rotV
rot (ϕV) = ϕ rotV −V × grad ϕ , rot grad ϕ = 0
grad (ϕψ) = ϕ grad ψ + ψ grad ϕ , div rotV = 0
(7.140)
si tinand cont ca vectorii a si k sunt constanti, se calculeaza expresiile :
div u = div[a sin(ωt− k·r + ϕ)] = a grad[sin(ωt− k·r + ϕ)] = − (a·k) cos(ωt− k·r + ϕ)
rotu = rot[a sin(ωt− k·r + ϕ)] =−a×grad[sin(ωt− k·r + ϕ)]=(a×k) cos(ωt− k·r + ϕ)
grad div u = −grad[(a·k) cos(ωt− k·r + ϕ)] = −(a·k) grad[cos(ωt− k·r + ϕ)] =
= −(a·k)k sin(ωt− k·r + ϕ) = −(u·k)k
∆u = grad div u− rot rotu = −(u·k)k− rot[(a×k) cos(ωt− k·r + ϕ)] =
= −(u·k)k + (a×k)×grad[cos(ωt− k·r + ϕ)] =
= −(u·k)k + (u×k)×k = −(u·k)k− k×(u×k) = −k2u(7.141)

7.4. UNDE ELASTICE 195
Introducand aceste rezultate ın ecuatia (7.131) si observand ca∂2u
∂t2= −ω2u , se obtine ın
final conditia cautata pentru u :(ρω2 − µ k2
)u = (λ + µ) (u · k)k (7.142)
care este echivalenta cu urmatorul sistem liniar si omogen ın componentele ui ; i = 1, 2, 3 aledeplasarii :
3∑
j=1
[(ρω2 − µ k2
)δij − (λ + µ) kikj
]uj = 0 , i = 1, 2, 3 (7.143)
Pentru ca sistemul sa admita solutii nebanale, va trebui ca determinantul coeficientilor safie nul. Se va presupune ın plus ca λ + µ 6= 0 .
Este ınsa mai simplu de observat direct pe conditia (7.142) ca trebuie luate ın considerareurmatoarele doua cazuri : u · k 6= 0 si u · k = 0 .
a. Cazul u · k 6= 0 . In acest caz, ınmultind scalar conditia (7.142) cu vectorul k sisimplificand cu produsul (u · k) , se obtine urmatoarea relatie care trebuie sa existe ıntre ωsi k : (
ρω2 − µ k2)
= (λ + µ) k2 (7.144)
Tinand cont de (7.144), conditia (7.142) devine :
u =(u · k)
k2k (7.145)
care nu poate fi ındeplinita decat daca :
u ‖ k (7.146)
Astfel, pentru ca unda plana avand forma generala (7.132) sa fie o solutie a ecuatiilor luiLame, va trebui ca deplasarile u ale particulelor sa se faca ın directia k de propagare a undei.O astfel de unda este numita longitudinala , viteza sa de propagare rezultand din ecuatia(7.144) :
cl =ω
k=
√λ + 2 µ
ρ(7.147)
Aceasta solutie va fi notata cu u1 si folosind (7.141) se observa ca :
ϑ = div u1 6= 0 , Ω =1
2rotu1 = 0 (7.148)
unde ϑ reprezinta deformatia specifica de volum, iar Ω este vectorul rotatie al particulei.Folosind (7.148b) si proprietatea (7.140d), ecuatia lui Lame (7.131) se reduce la ecuatia
undelor a lui d’Alembert :
∆u1 − 1
c2l
∂2u1
∂t2= 0 (7.149)
ceea ce confirma odata ın plus faptul ca solutia u1 corespunde unei unde longitudinale carese propaga cu viteza cl . Pe baza aceleiasi proprietati (7.148b) se poate afirma ca ın undele
196 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
longitudinale, particulele au numai miscari irotationale , motiv pentru care u1 se poatescrie si sub forma :
u1 = grad ϕ , ( rot grad ϕ = 0 ) (7.150)
Functia nou introdusa ϕ(r, t) satisface de asemenea ecuatia undelor a lui d’Alembert. Intr-adevar, ınlocuind (7.150) ın (7.149) si observand ca
∆ (grad ϕ) = grad div grad ϕ− rot rot grad ϕ︸ ︷︷ ︸0
= grad (∆ ϕ)
∂2
∂t2(grad ϕ) = grad
(∂2ϕ
∂t2
) (7.151)
rezulta :
grad
(∆ ϕ− 1
c2l
∂2ϕ
∂t2
)= 0 (7.152)
adica :
∆ ϕ− 1
c2l
∂2ϕ
∂t2= 0 (7.153)
Pe de alta parte, din proprietatea (7.148a) se deduce ca propagarea undei longitudinaleeste ınsotita de o schimbare de volum (ϑ 6= 0). Se arata usor ca deformatia specifica devolum ϑ satisface de asemenea ecuatia lui d’Alembert cu aceeasi viteza de propagare ca aundei longitudinale. Aplicand operatorul div ecuatiei (7.149) (sau ecuatiei lui Lame) sitinand cont de faptul ca :
div (∆u1) = div grad div u1 − div rot rotu1︸ ︷︷ ︸0
= ∆ (div u1)
div
(∂2u1
∂t2
)=
∂2
∂t2(div u1)
(7.154)
se obtine ecuatia :
∆ ϑ− 1
c2l
∂2ϑ
∂t2= 0 (7.155)
a carei solutie este de forma (v. expresia (7.141a)) :
ϑ = − (a · k) cos(ωt− k · r + ϕ) (7.156)
Astfel, ın fiecare punct al mediului se produc destinderi si comprimari care se propaga ındirectia k cu viteza cl .
b. Cazul u · k = 0 . Aceasta ınseamna ca ın acest caz :
u⊥k (7.157)
iar din conditia (7.142) rezulta ca ıntre ω si k trebuie sa existe relatia :
ρω2 − µ k2 = 0 (7.158)
Se obtine astfel o alta solutie posibila a ecuatiilor lui Lame, care este tot de forma undei plane(7.132), ınsa pentru care miscarea de oscilatie a particulelor mediului se face perpendicular pe
7.4. UNDE ELASTICE 197
directia de propagare, motiv pentru care unda este numita transversala . Conform relatiei(7.158), viteza de propagare a undei transversale va fi :
ct =ω
k=
õ
ρ< cl (7.159)
Notand aceasta solutie cu u2 se observa, folosind relatiile (7.141), ca ın acest caz :
ϑ = div u2 = 0 , Ω =1
2rotu2 6= 0 (7.160)
Evident, ın acest caz, ecuatiile lui Lame se reduc la :
∆u2 − 1
c2t
∂2u2
∂t2= 0 (7.161)
Din prima proprietate (7.160) rezulta ca ın undele transversale particulele au numai miscarisolenoidale , asa ıncat se poate considera ca u2 este de forma :
u2 = rot ψ , ( div rot ψ = 0 ) (7.162)
unde functia ψ(r, t) satisface de asemenea ecuatia undelor a lui d’Alembert cu aceeasi vitezade propagare ct . Verificarea este imediata, deoarece observand ca :
∆ (rot ψ) = grad div rot ψ − rot rot rot ψ =
= rot grad div ψ − rot rot rot ψ = rot (∆ ψ)
∂2
∂t2(rot ψ) = rot
(∂2ψ
∂t2
) (7.163)
din (7.161) rezulta :
rot
(∆ ψ − 1
c2t
∂2ψ
∂t2
)= 0 (7.164)
adica :
∆ ψ − 1
c2t
∂2ψ
∂t2= 0 (7.165)
De asemenea, aplicand ecuatiei (7.161) operatorul rot si tinant cont ca :
rot (∆u2) = ∆ (rotu2) , rot
(∂2u2
∂t2
)=
∂2
∂t2(rotu2) (7.166)
se obtine pentru vectorul rotatie Ω ecuatia :
∆Ω− 1
c2t
∂2Ω
∂t2= 0 (7.167)
care are solutia (v. expresia (7.141b)) :
Ω =1
2(a× k) cos(ωt− k · r + ϕ) (7.168)

198 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
Aceasta functie descrie propagarea oscilatiilor particulelor materiale ın rotatie din planulperpendicular pe directia de propagare.
In ıncheiere trebuie observat ca deoarece sistemul (7.131) este liniar si omogen, ınseamnaca daca u1 si u2 sunt doua solutii particulare ale acestui sistem, atunci si
u = u1 + u2 = grad ϕ + rot ψ (7.169)
este tot o solutie a acestui sistem. Rezulta ca ın general o perturbatie produsa ıntr-unmediu elastic infinit cu µ 6= 0 da nastere simultan atat la unde longitudinale, cat si launde transversale. Insa aceste unde se vor separa datorita vitezelor lor diferite de propagare(cl > ct), ele propagandu-se ın continuare ın mod independent.
Aplicatii
1. O coarda metalica orizontala de lungime L , fixata la capete, careia i se imprima lamomentul initial o deformare transversala ın plan vertical, este lasata sa oscileze liber. Sa sestudieze propagarea oscilatiilor transversale ın absenta si ın prezenta fortelor de greutate.
Rezolvare : Alegand originea la unul din capete, iar axa Ox orientata ın lungul corzii, sistemulde deplasari este de forma :
u1 = 0 , u2 = u(x, t) , u3 = 0 (1)
In acest caz ecuatiile lui Lame se reduc la :
ρ∂2u
∂t2= −ρ g + µ
∂2u
∂x2(2)
cu conditiile initiale si la limita :
u(x, 0) = f(x) ,∂u
∂t
∣∣∣∣∣t=0
= 0 ; u(0, t) = u(L, t) = 0 (3)
a) Neglijand fortele de greutate, ecuatia (2) devine :
∂2u
∂t2= c2 ∂2u
∂x2; c2 =
µ
ρ(4)
unde c este viteza de propagare a oscilatiilor transversale prin coarda. Ecuatia (4) se rezolva prinmetoda separarii variabilelor :
u(x, t) = X(x) · T (t) (5)

7.4. UNDE ELASTICE 199
Inlocuind ın (4) rezulta ecuatiile :
T ′′
T= c2 X ′′
X= − k2 (6)
care au solutiile ;
X(x) = α cosk
cx + β sin
k
cx ; T (t) = γ cos kt + δ sin kt (7)
Impunand conditiile la limita X(0) = X(L) = 0 , precum si conditia initiala T ′(0) = 0 , rezulta :
α = 0 ; δ = 0 ;k
cL = nπ , n = 1, 2, 3, . . . (8)
deci solutia generala a ecuatiei (4) se va scrie :
u(x, t) =∞∑
n=1
un(x, t) =∞∑
n=1
an sinnπ
Lx cos
nπc
Lt (9)
Coeficientii an se determina din relatia :
u(x, 0) = f(x) =∞∑
n=1
an sinnπ
Lx (10)
care reprezinta dezvoltarea ın serie Fourier a lui f(x) . Deoarece
an =2
L
L∫
0
f(x) sinnπ
Lx dx (11)
forma finala a solutiei (9) obtinuta ın ipoteza g = 0 va fi :
u(x, t) =∞∑
n=1
2
L
L∫
0
f(x) sinnπ
Lx dx
sin
nπ
Lx cos
nπc
Lt (12)
b) Daca g 6= 0 va trebui cautata solutia ecuatiei :
∂2u
∂t2= −g + c2 ∂2u
∂x2(13)
cu aceleasi conditii initiale si la limita (3). Pentru a aduce problema la cazul discutat anterior, seface schimbarea :
u(x, t) = v(x, t) + ϕ(x) (14)
ecuatia (13) devenind :∂2v
∂t2= −g + c2ϕ′′ + c2 ∂2v
∂x2(15)
conditiile initiale si la limita fiind :
v(x, 0) + ϕ(x) = f(x) ,∂v
∂t
∣∣∣∣∣t=0
= 0 ; v(0, t) + ϕ(0) = v(L, t) + ϕ(L) = 0 (16)

200 CAPITOLUL 7. ECUATIILE MEDIILOR ELASTICE
Daca se alege functia ϕ(x) astfel ıncat :
c2ϕ′′ − g = 0 ; ϕ(0) = ϕ(L) = 0 (17)
ecuatia (13) devine :∂2v
∂t2= c2 ∂2v
∂x2(18)
iar conditiile (16) se scriu :
v(x, 0) = f(x)− ϕ(x) ,∂v
∂t
∣∣∣∣∣t=0
= 0 ; v(0, t) = v(L, t) = 0 (19)
Deoarece solutia ecuatiei (17) ımpreuna cu conditiile la limita este :
ϕ(x) =g
2c2
(x2 − Lx
)(20)
folosind si rezultatele de la punctul (a), va rezulta ın final solutia cautata :
u(x, t) =∞∑
n=1
2
L
L∫
0
[f(x)− g
2c2
(x2 − Lx
)]sin
nπ
Lx dx
sin
nπ
Lx cos
nπc
Lt +
g
2c2
(x2 − Lx
)
(21)
Deoarece ın metaleg
2c2¿ 1 , este de asteptat ca termenii corectivi, datorati luarii ın considerare
a fortelor de greutate, sa fie foarte mici.
Capitolul 8
Elemente de mecanica fluidelor
Prin fluide se ınteleg mediile materiale continue deformabile care, datorita fortelor decoeziune relativ mici dintre particulele care le compun, au posibilitatea de a-si modifica multforma sub actiunea unor forte foarte mici. Dintre proprietatile fluidelor trebuie amintitedeformabilitatea mare, mobilitatea, capacitatea de a curge (fluiditatea) si de a lua formavasului ın care se gasesc. Din punctul de vedere al deformabilitatii, fluidele se ımpart ınlichide , care sunt practic incompresibile si ın gaze care sunt compresibile , acestea dinurma neavand ın general un volum si o forma bine determinata. Rezultatele obtinute ınteoria generala a mediilor continue deformabile sunt aplicabile si ın cazul fluidelor, ınsa culuarea ın considerare a particularitatilor amintite.
8.1 Legi constitutive si ecuatii de miscare
Deoarece ın timpul finit t , deplasarile particulei de fluid ui ; i = 1, 2, 3 nu mai sunt mici,pentru a folosi rezultatele obtinute ın teoria geometrica a micilor deformatii si deplasari,trebuie luate ın considerare intervale de timp infinitezimale dt pentru care deplasarile ui suntınlocuite cu cu vidt , marimile vi ; i = 1, 2, 3 reprezentand componentele vitezei particuleifluide la momentul t . In mod corespunzator, tensorul de deformatie va avea forma :
εik =1
2
(∂vi
∂xk
+∂vk
∂xi
)dt = vikdt ; i, k = 1, 2, 3 (8.1)
unde tensorul avand componentele vik ; i, k = 1, 2, 3 este numit tensorul viteza dedeformatie . Componentele acestui tensor au o interpretare analoaga cu componenteletensorului micilor deformatii, cu deosebirea ca ın acest caz marimile respective sunt defi-nite pe unitate de timp. Daca fluidul este incompresibil, viteza deformatiei specifice devolum este nula :
θ = div v = 0 (8.2)
Intr-un fluid actioneaza atat forte exterioare, cat si forte interioare, acestea la randul lorputand fi forte masice si de contact. Fortele interioare de contact care actioneaza pe suprafatade separare a doua elemente vecine D1 si D2 se manifesta ın doua moduri distincte. In primulrand, ın fiecare punct al suprafetei de separare, actiunea lui D1 asupra lui D2 se manifestaprintr-o ımpotrivire la deplasarea lui D2 ın sensul normalei interioare la D1 , separarea
201

202 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
celor doua elemente facandu-se foarte usor datorita fortelor de coeziune mici. Astfel, pe unelement de suprafata dσ avand orientarea n(n1, n2, n3) va actiona vectorul tensiune T(1)
n
care are numai o componenta normala, adica T(1)ni = T (1)
nn ni ; i = 1, 2, 3 (T (1)nn < 0). Insa din
studiul echilibrului tetraedrului elementar rezulta T(1)ni =
3∑
k=1
T(1)ik nk , asa ıncat egaland cele
doua expresii se obtine :
3∑
k=1
(T
(1)ik − T (1)
nn δik
)nk = 0 ; i = 1, 2, 3 (8.3)
adica :T
(1)ik = T (1)
nn δik = − p δik ; i, k = 1, 2, 3 (8.4)
Marimea scalara p = −T (1)nn > 0 , independenta de orientarea suprafetei, este numita presi-
une , ea putand fi doar pozitiva, deoarece ın fluid nu sunt posibile tractiuni, ci doar com-presiuni (T (1)
nn < 0).In al doilea rand, daca fluidul este ın miscare, atunci ın afara fortelor amintite anterior,
mai pot apare forte care se opun deplasarii relative a doua elemente ınvecinate. Pro-prietatea, numita viscozitate , se manifesta prin actiunea asupra elementului de suprafatadσ a unei tensiuni suplimentare care are componenta tangentiala diferita de zero si care estede natura unei forte de frecare. Evident, intensitatea acestei forte trebuie sa depinda deviteza relativa de deplasare a elementelor considerate. Notand tensiunile corespunzatoarecu T
(2)ik ; i, k = 1, 2, 3 , pentru un fluid vascos ın miscare, tensorul tensiunilor va avea forma
generala :Tik = T
(1)ik + T
(2)ik = − p δik + T
(2)ik ; i, k = 1, 2, 3 (8.5)
Pentru a gasi legatura dintre componentele tensorului T(2)ik ; i, k = 1, 2, 3 si caracteristicile
miscarii unui element al mediului fluid din vecinatatea unui punct dat, reamintim ca aceastamiscare se compune dintr-o translatie rigida, o rotatie rigida si o deformatie pura. Deoarecenumai procesul de deformatie pura implica viteze relative de deplasare nenule ale punctelormediului, este natural sa se stabileasca o legatura ıntre componentele T
(2)ik ; i, k = 1, 2, 3 si
componentele tensorului viteza de deformatie vik ; i, k = 1, 2, 3 :
T(2)ik = T
(2)ik (v11, v22, v33, v23, v31, v12) ; i, k = 1, 2, 3 (8.6)
Presupunand fluidul omogen, izotrop si ın miscare lenta. se poate considera ın bunaaproximatie ca ecuatiile (8.6) au o forma liniara. Ipotezele fiind asemanatoare cu celefacute cu prilejul deducerii legii lui Hooke, se poate reface rationamentul respectiv, ın fi-nal ajungandu-se la rezultatul :
T(2)ik = λ′ θ δik + 2 µ′vik ; i, k = 1, 2, 3 (8.7)
unde λ′ si µ′ sunt niste coeficienti care caracterizeaza viscozitatea fluidului, iar θ = div v .Reunind relatiile (8.4) si (8.7) , se ajunge la expresia generala a legii constitutive pentruun fluid vascos ın miscare :
Tik = (λ′ θ − p) δik + 2 µ′vik ; i, k = 1, 2, 3 (8.8)

8.1. LEGI CONSTITUTIVE SI ECUATII DE MISCARE 203
Se remarca, fapt confirmat si experimental, ca pentru un fluid aflat ın stare de echilibru(repaus) cand deformatiile sunt nule, tensiunile nu sunt nule, ele reducandu-se la presiuni.
Deoarece valoarea presiunii ıntr-un punct se defineste cu ajutorul mediei aritmetice atensiunilor normale (care este invarianta la o rotatie a axelor si deci nu depinde de orientareasuprafetei) :
p = − 1
3(T11 + T22 + T33) (8.9)
ıntre coeficientii λ′ si µ′ va trebui sa existe relatia (ipoteza lui Stokes) :
λ′ +2
3µ′ = 0 (8.10)
Cu notatia µ′ ≡ η , unde η este coeficientul de viscozitate , legea constitutiva (8.8) devine :
Tik = −(p +
2
3η div v
)δik + 2 η vik ; i, k = 1, 2, 3 (8.11)
Fluidele vascoase (reale) pentru care este valabila legea constitutiva (8.11) sunt numitesi fluide newtoniene , deoarece ecuatia (8.11) este o generalizare a legii elementare a luiNewton care furnizeaza expresia tensiunii tangentiale care apare pe suprafata de separare adoua straturi de fluid aflate la distanta dx2 , care aluneca unul fata de altul cu viteza relativa
dv1 : T12 = ηdv1
dx2
. In cazul ın care fluidul vascos este incompresibil (div v = 0) , relatiile
(8.11) devin :Tik = − p δik + 2 η vik ; i, k = 1, 2, 3 (8.12)
Daca fortele de viscozitate sunt presupuse nule, neglijandu-se astfel complet coeziuneadintre particule, fluidul este numit ideal , legea sa constitutiva rezultand din (8.11) ın careη = 0 :
Tik = − p δik ; i, k = 1, 2, 3 (8.13)
Intr-un fluid ideal exista doar tensiuni normale, care nu depind de orientarea suprafetei sicare au aceeasi valoare, fie ca fluidul este ın miscare, fie ın stare de repaus.
Ecuatiile de miscare ale fluidelor se obtin din ecuatiile generale de miscare ale mediului
continuu deformabil ai = fi +1
ρ
3∑
k=1
∂Tik
∂xk
; i = 1, 2, 3 , ın care se ınlocuiesc expresiile (8.11) si
(8.1). Rezulta sistemul neliniar de ecuatii cu derivate partiale :
dvi
dt= fi − 1
ρ
∂p
∂xi
+η
ρ∆ vi +
1
3
η
ρ
∂θ
∂xi
; i = 1, 2, 3 (8.14)
care sunt cunoscute sub numele de ecuatiile Navier-Stokes . In forma vectoriala, acestease scriu :
dv
dt= f − 1
ρgrad p +
η
ρ∆v +
1
3
η
ρgrad div v (8.15)
sau, introducand coeficientul de viscozitate cinematica ν =η
ρ:
dv
dt= f − 1
ρgrad p + ν ∆v +
1
3ν grad div v (8.16)

204 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
Pentru fluidul ideal (ν = 0), ecuatiile de miscare se simplifica considerabil, ele avandforma :
dv
dt= f − 1
ρgrad p (8.17)
si poarta numele de ecuatiile lui Euler .Daca pentru descrierea miscarii sunt folosite variabilele spatiale (r, t) , atunci derivata
substantiala a vitezei care figureaza ın ecuatiile (8.16) si (8.17) are expresia :
dv
dt=
∂v
∂t+ (v · grad)v (8.18)
Avand ın vedere relatia generala :
grad (V1 ·V2) = (V1 grad)V2 + (V2 grad)V1 + V1 × rotV2 + V2 × rotV1 (8.19)
ın care se fac ınlocuirile V1 = V2 = v , expresia (8.18) se poate transcrie ıntr-o forma foarteutila pentru aplicatii :
dv
dt=
∂v
∂t+ grad
(1
2v2
)− v × rotv (8.20)
Se observa ca ın aceasta expresie intervine vectorul ω =1
2rotv , numit vartej , care repre-
zinta viteza de rotatie instantanee a particulei mobile, considerata rigida, ın jurul unei axecare trece printr-un punct dat al particulei.
Cunoasterea starii de miscare ıntr-un punct dat r al spatiului la momentul t implicadeterminarea a cinci functii necunoscute : v = v(r, t) , ρ = ρ(r, t) si p = p(r, t) . De-oarece sistemul de ecuatii de miscare (8.16) sau (8.17) contine doar trei ecuatii pentrucomponentele vi ; i = 1, 2, 3 ale vitezei, el va trebui completat cu ınca doua ecuatii, anumeecuatia de continuitate a masei ın forma lui Euler :
∂ρ
∂t+ div (ρv) = 0 sau
dρ
dt+ ρ div v = 0 (8.21)
si ecuatia caracteristica a fluidului, avand forma generala :
f(p, ρ) = 0 (8.22)
In ceea ce priveste ecuatia caracteristica, trebuie subliniat ca forma ei depinde de naturafluidului si de proprietatile procesului studiat, de obicei ea putand fi dedusa din consideratiicare utilizeaza si principiile termodinamicii. Pentru un gaz ideal, ın cazul cand procesul este
izoterm, ecuatia (8.22) are formap
ρ= const. , iar daca procesul este adiabatic aceasta are
formap
ργ= const. cu γ =
Cp
CV
. Daca fluidul este incompresibil (θ = div v = 0), ecuatia
caracteristica se reduce la egalitatea
ρ = ρ0 = const. (8.23)
situatie ın care si ecuatiile de miscare capata o forma mai simpla. Astfel, ecuatiile pentrufluidele vascoase incompresibile se scriu :
dv
dt= f − 1
ρ0
grad p + ν ∆v (8.24)

8.1. LEGI CONSTITUTIVE SI ECUATII DE MISCARE 205
iar pentru fluide ideale incompresibile acestea devin :
dv
dt= f − 1
ρ0
grad p (8.25)
Pentru ca sistemul de ecuatii (8.16) (sau (8.17)), (8.21) si (8.22) sa admita o solutieunica, vor trebui precizate conditiile initiale care specifica distributia vitezelor, presiuniisi densitatii ın domeniul ocupat de fluid la momentul initial, precum si conditiile la limitape suprafata exterioara care delimiteaza domeniul ocupat de fluid la orice moment. Incazul unui fluid ideal, conditiile la limita trebuie sa exprime faptul ca fluidul aluneca peun perete rigid care ıl margineste, iar ın cazul fluidului vascos aceleasi conditii trebuie saexprime aderenta fluidului la peretele respectiv.
Functia vectoriala v = v(r, t) defineste campul vitezelor la orice moment t . Cunoscandcampul vitezelor, poate fi determinata traiectoria unei particule a fluidului prin integrareaecuatiei vectoriale :
dr
dt= v(r, t) cu r(t0) = r0(x
01, x
02, x
03) (8.26)
care este echivalenta cu sistemul de trei ecuatii scalare :
dx1
v1(x1, x2, x3, t)=
dx2
v2(x1, x2, x3, t)=
dx3
v3(x1, x2, x3, t)= dt (8.27)
unde proiectiile vitezei vi ; i = 1, 2, 3 nu sunt simultan nule. Prin integrarea sistemului seobtine o familie de curbe depinzand de trei constante de integrare care pot fi determinatefolosind conditiile initiale r = r(x0
1, x02, x
03, t) , unde x0
i ; i = 1, 2, 3 reprezinta coordonatelepozitiei initiale ale particulei considerate. Este evident ca printr-un punct al spatiului nupoate trece decat o singura traiectorie.
In afara traiectoriilor este util sa se cunoasca si liniile de curent . O linie de curentreprezinta o curba imaginara ın fluid la momentul fixat t , care este tangenta la vitezele v ınfiecare din punctele sale. Ecuatia vectoriala a unei linii de curent are forma :
v × dr = 0 ; t fixat (8.28)
unde dr este o deplasare infinitezimala pe linia de curent. Proiectand ecuatia (8.28) pe axeleunui sistem cartezian de coordonate, se obtin ecuatiile :
dx1
v1(x1, x2, x3, t)=
dx2
v2(x1, x2, x3, t)=
dx3
v3(x1, x2, x3, t); t fixat (8.29)
ın care t joaca rolul unui parametru numeric. Pentru fiecare moment t exista o familie delinii de curent
ϕ(x1, x2, x3, t) = C1 ; ψ(x1, x2, x3, t) = C2 (8.30)
care depinde de doua constante de integrare care se pot determina impunand conditia ca olinie de curent sa treaca printr-un punct dat al spatiului. La un moment t , prin fiecare punctr al spatiului, ın care componentele vitezei vi ; i = 1, 2, 3 nu sunt toate nule, trece o singuralinie de curent. Deoarece ecuatiile liniilor de curent contin explicit timpul t , ele vor fi varia-bile ın timp, asa ıncat printr-un punct al spatiului pot trece ın decursul timpului mai multe

206 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
linii de curent, ınsa numai o singura traiectorie. Din acest motiv, ın general liniile de curentnu coincid cu traiectoriile particulelor de fluid. Doar ın cazul miscarii stationare (per-
manente), pentru care parametrii miscarii nu depind explicit de timp (∂vi
∂t= 0 ; i = 1, 2, 3),
sistemele de ecuatii (8.27) si (8.29) coincid si atunci traiectoriile particulelor se vor confundacu liniile de curent care acum sunt fixe.
8.2 Fluide ideale
Dupa cum s-a aratat, un fluid este ideal daca indiferent de starea ın care se afla, demiscare sau de repaus, tensiunile au numai componente normale a caror marime nu depindede orientarea suprafetei, ceea ce determina forma simpla a legii constitutive :
Tik = − p δik ; i, k = 1, 2, 3 (8.31)
unde scalarul pozitiv p este numit presiune . Odata cu neglijarea viscozitatii fluidului ınmiscare, se presupune de asemenea ca se poate face abstractie de schimbul de caldura dintreparticulele mediului, asa ıncat ın cele ce urmeaza se considera ca miscarea fluidului esteadiabatica (sau izentropica). Ecuatiile de miscare ale fluidelor ideale, cunoscute si subnumele de ecuatiile lui Euler , au forma generala :
dv
dt= f − 1
ρgrad p (8.32)
derivata substantiala a vitezei avand expresia :
dv
dt=
∂v
∂t+ (v · grad)v =
∂v
∂t+ grad
(1
2v2
)− v × rotv (8.33)
Ecuatiile lui Euler (8.32), ımpreuna cu ecuatia de continuitate a masei
∂ρ
∂t+ div (ρv) = 0 sau
dρ
dt+ ρ div v = 0 (8.34)
precum si cu ecuatia caracteristicaf(p, ρ) = 0 (8.35)
permit determinarea starii de miscare a fluidului, respectiv a functiilor v = v(r, t) , p = p(r, t)si ρ = ρ(r, t) , daca se precizeaza conditiile la limita si conditiile initiale. In cele ce urmeaza,vor fi prezentate cateva cazuri ın care aceste ecuatii se pot integra usor.
Pentru ınceput este studiata starea de echilibru mecanic (repaus), pentru care v = 0 .In aceasta situatie din (8.32) se obtine :
grad p = ρ f (8.36)
care reprezinta ecuatia fundamentala a hidrostaticii . Se observa direct ca daca fortelemasice sunt neglijabile (f ' 0), atunci presiunea p este aceeasi ın toate punctele fluidului,obtinandu-se astfel legea lui Pascal .

8.2. FLUIDE IDEALE 207
Daca fluidul poate fi considerat incompresibil (ρ = const.) si se gaseste ın campgravitational omogen (f = g), atunci orientand axa Oz vertical ın sus, din (8.36) rezulta :
∂p
∂x=
∂p
∂y= 0 ,
dp
dz= − ρg (8.37)
si prin integrare se obtine :
p = p0 + ρg (z0 − z) , ρ = const. (8.38)
unde p0 este presiunea aplicata pe suprafata libera a fluidului situata la ınaltimea z0 . Solutia(8.38) reprezinta expresia presiunii hidrostatice , conform careia presiunea ıntr-un punctdin interiorul fluidului incompresibil ın repaus, este egala cu suma dintre presiunea aplicatape suprafata libera si greutatea unei coloane de fluid de sectiune unitate avand ınaltimea(z0 − z) . Daca fluidul este compresibil , atunci pentru a integra ecuatia (8.37c) va trebuicunoscuta ecuatia caracteristica. Presupunand ca fluidul este un gaz ideal aflat ın echilibru
termic la temperatura T , din ecuatia de stare p = ρRT
M(aici M este masa moleculara, iar
R este constanta lui Clapeyron) rezulta ρ =M
RTp , care ınlocuita ın (8.37c) conduce prin
integrare la solutia :
p = p0 exp[− Mg
RT(z − z0)
](8.39)
S-a obtinut astfel formula barometrica , conform careia presiunea atmosferica scade cuınaltimea dupa o lege exponentiala.
Poate fi calculata si forta cu care un fluid incompresibil greu actioneaza asupra unuicorp rigid aflat ın interiorul sau. Deoarece forta care actioneaza pe unitatea de suprafata acorpului este Tn = − pn (normala n este orientata spre interiorul fluidului), forta totala cucare fluidul actioneaza asupra corpului va fi :
F =∫
Σc
Tndσ = −∫
Σc
pn dσ = −∫
Vc
grad p dv = − ρg∫
Vc
dv = − ρVc g = −Mc g (8.40)
unde integrala pe suprafata a fost transformata ın integrala pe volum si s-a tinut cont deecuatia (8.36) unde f = g . S-a obtinut astfel principiul lui Arhimede , conform caruiaasupra unui corp scufundat ıntr-un fluid actioneaza o forta egala ın marime cu greutateavolumului de fluid dezlocuit si orientata ın sens opus campului gravitational.
Trecand la studiul fluidelor ideale ın regim de miscare , ecuatia (8.32) va fi ınmultitascalar cu v , rezultand astfel expresia variatiei energiei cinetice ın unitate de timp raportatala 1 gram de fluid aflat ın miscare :
d
dt
(1
2v2
)= v · f − 1
ρv · grad p (8.41)
Presupunand ca fortele masice sunt potentiale :
f = − grad V (8.42)

208 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
unde V (r, t) este energia potentiala ın camp extern care revine unitatii de masa, se observaca :
v · f = − (v · grad) V =∂V
∂t− dV
dt(8.43)
unde s-a tinut cont de expresia derivatei substantiale dupa timp pentru functia scalara V (r, t)
ın variabile euleriene :dV
dt=
∂V
∂t+ (v · grad) V . In mod analog se va putea scrie ca :
(v · grad) p =dp
dt− ∂p
∂t(8.44)
Folosind aceste rezultate, ecuatia (8.41) devine :
d
dt
(1
2v2 + V
)=
∂V
∂t+
1
ρ
∂p
∂t− 1
ρ
dp
dt(8.45)
Pe de alta parte, tinand cont de principiul ıntai al termodinamicii :
du = dq − p d
(1
ρ
)(8.46)
scris pentru unitatea de masa (aici u reprezinta energia interna pentru 1 gram de fluid) sireamintind faptul ca s-a presupus ca curgerea este adiabatica (dq = 0), deoarece prin definitie
entalpia pentru 1 gram de fluid este h = u +p
ρ, se observa ca :
dh = du + p d
(1
ρ
)+
1
ρdp = dq︸︷︷︸
0
+1
ρdp =
1
ρdp (8.47)
Tinand cont de aceasta observatie, valabila doar pentru miscari izentropice ale fluidului,ecuatia (8.45) devine :
d
dt
(1
2v2 + h + V
)=
∂V
∂t+
1
ρ
∂p
∂t(8.48)
Daca curgerea izentropica este stationara , adica daca parametrii miscarii fluidului nu de-pind explicit de timp, atunci :
d
dt
(1
2v2 + h + V
)= 0 (8.49)
adica :1
2v2 + h + V = C (8.50)
unde constanta C se determina din conditiile initiale si depinde de pozitia initiala si vitezainitiala a particulei de fluid considerate. Relatia (8.50) poarta numele de integrala luiBernoulli si ea afirma ca ın lungul traiectoriei unei particule de fluid aflat ın miscareizentropica stationara, suma dintre energia cinetica, entalpie si energia potentialaeste o constanta . Curgerea fiind stationara, traiectoria particulei se confunda cu linia decurent. Integrala lui Bernoulli se simplifica daca fluidul este incompresibil (ρ = const.),

8.2. FLUIDE IDEALE 209
deoarece ın acest caz curgerea fiind izentropica, energia interna este o constanta a miscariicare poate fi ınglobata ın constanta C si atunci ecuatia (8.50) devine :
1
2v2 +
p
ρ+ V = C , ρ = const. (8.51)
Daca curgerea are loc ın camp gravitational omogen (f = g), presupunand ca axa Ozeste orientata pe verticala ın sus, atunci V = gz + const. si integrala lui Bernoulli capataforma elementara :
1
2v2 +
p
ρ+ gz = C , ρ = const. (8.52)
O proprietate importanta a fluidelor ideale este stabilita de teorema lui Thomson ,conform careia ın cursul miscarii izentropice a unui fluid ideal, circulatia vitezeipe un contur material ınchis oarecare se conserva, daca fortele masice derivadintr-un potential . Prin circulatia vitezei ın lungul unui contur material ınchis se ıntelegeintegrala :
Γ =∮
C
v δr (8.53)
ecuatia conturului fiind r = r(α, t) ; 0 ≤ α ≤ α0 ; r(0, t) = r(α0, t) . Operatorul δ se refera
doar la variatia parametrului α cand t este fixat si evidentd
dtδ = δ
d
dt. Conform teoremei
lui Thomson, va trebui aratat cadΓ
dt= 0 . Avand ın vedere ca ın cursul miscarii se modifica
atat vitezele particulelor de fluid care alcatuiesc conturul material, cat si forma conturului,rezulta ca :
dΓ
dt=
d
dt
∮
C
v δr =∮
C
dv
dtδr +
∮
C
v δv =∮
C
dv
dtδr +
∮
C
δ(
1
2v2
)
︸ ︷︷ ︸0
=∫
Σ
(rot
dv
dt
)· n dσ (8.54)
unde s-a tinut cont de faptul ca integrala pe un contur ınchis dintr-o diferentiala totalaexacta este nula si s-a folosit folosit formula lui Stokes, conform careia :
∮
C
V dr =∫
Σ
(rotV) · n dσ (8.55)
unde Σ este suprafata care se sprijina pe conturul ınchis C.Pe de alta parte, se observa ca daca miscarea fluidului ideal este izentropica, atunci
din egalitatea1
ρdp = dh rezulta
1
ρgrad p = grad h , ceea ce ınseamna ca daca fortele masice
deriva dintr-un potential : f = − grad V , atunci ecuatiile lui Euler (8.32) se scriu :
dv
dt= − grad (V + h) (8.56)
Introducand (8.56) ın (8.54) rezultadΓ
dt= 0 , deoarece rot grad ≡ 0 .

210 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
Pe baza teoremei lui Thomson se poate afirma ca miscarea rotationala a unui fluidideal se conserva . Intr-adevar, folosind formula lui Stokes (8.55) si tinand cont ca
ω =1
2rotv , se obtine pentru circulatia Γ expresia :
Γ =∮
C
v δr =∫
Σ
(rotv) · n dσ = 2∫
Σ
ω · n dσ = const. (8.57)
ceea ce arata ca fluxul vitezei unghiulare printr-o suprafata materiala de fluid se conserva ıncursul miscarii. Daca la un moment dat ın toate punctele fluidului rotv = 0 , lucru posibildaca vitezele formeaza un camp de gradienti :
v = grad ϕ (8.58)
unde functia ϕ(r, t) poarta numele de potential de viteza , atunci circulatia Γ pe orice conturınchis dintr-un domeniu simplu conex ramane nula la orice moment ulterior. In acesteconditii se spune ca miscarea fluidului este fara vartejuri , sau potentiala . Bineınteles,proprietatea enuntata ısi pierde sensul daca fluidul, ın curgerea sa, ocoleste un obstacol rigid,deoarece ın acest caz teorema lui Thomson nu mai este aplicabila pentru stratul subtire dinimediata vecinatate a suprafetei obstacolului si ın plus, ın acest strat, ınsasi modelul de fluidideal devine inutilizabil datorita fortelor de viscozitate care nu mai sunt neglijabile. Totusi,daca curgerea este lenta, iar obstacolul are o forma aerodinamica corespunzatoare, se poateconsidera ın buna aproximatie ca miscarea fluidului ramane potentiala.
Miscarea potentiala izentropica a unui fluid ideal aflat sub actiunea unor forte masicecare deriva dintr-un potential, reprezinta un alt caz particular ın care ecuatiile lui Euler pot
fi integrate fara dificultati deosebite. Astfel, folosind expresia (8.33b) pentrudv
dt, ecuatiile
(8.56) se scriu :∂v
∂t+ grad
(1
2v2
)− v × rotv︸ ︷︷ ︸
0
= − grad (V + h) (8.59)
Tinand cont de definitia (8.58) si observand ca∂
∂t(grad ϕ) = grad
(∂ϕ
∂t
), ecuatiile (8.59)
devin :
grad
(∂ϕ
∂t+
1
2v2 + h + V
)= 0 (8.60)
de unde rezulta ca expresia din paranteza nu depinde de pozitia particulei de fluid, ea putandfi functie doar de variabila t :
∂ϕ
∂t+
1
2v2 + h + V = f(t) (8.61)
Relatia obtinuta poarta numele de integrala lui Cauchy si spre deosebire de constantacare figureaza ın integrala lui Bernoulli a carei valoare depinde de traiectoria considerata,functia f(t) este aceeasi ın tot domeniul ocupat de fluid la momentul t . Pentru a determinafunctia f(t) , este suficient sa se gaseasca membrul stang al integralei lui Cauchy ca functiede timp ın orice punct al fluidului.

8.2. FLUIDE IDEALE 211
Daca miscarea potentiala este stationara , integrala lui Cauchy se reduce la o integralaasemanatoare cu cea a lui Bernoulli :
1
2v2 + h + V = C (8.62)
cu unica deosebire ca acum constanta C este aceeasi pentru toate particulele de fluid. Dacaın plus fluidul este incompresibil, atunci (8.62) devine :
1
2v2 +
p
ρ+ V = C , ρ = const. (8.63)
Se mai observa ca pentru miscarea potentiala a unui fluid incompresibil, din ecuatia decontinuitate rezulta ca potentialul vitezelor satisface ecuatia lui Laplace :
div v = div grad ϕ = ∆ ϕ = 0 (8.64)
fiind astfel o functie armonica pe domeniul ocupat de fluid.
Aplicatii
1. Sa se calculeze viteza curgerii izentropice stationare a unui fluid incompresibil printr-unorificiu de sectiune mica aflat ın vecinatatea bazei unui rezervor de dimensiuni foarte mari. Sepresupune campul gravitational constant.
Rezolvare : Presupunand ca axa Oz este orientata vertical ın sus si atasand indicii 1 si 2parametrilor miscarii particulei de fluid aflata ın vecinatatea suprafetei superioare a fluidului dinrezervor, respectiv ın vecinatatea orificiului de la baza rezervorului, integrala lui Bernoulli se scrie :
1
2v2
1 +p1
ρ+ gz1 =
1
2v2
2 +p2
ρ+ gz2 (1)
de unde rezulta :
v22 − v2
1 = 2
[g (z1 − z2)− 1
ρ(p2 − p1)
](2)
Fluidul fiind presupus incompresibil, din ecuatia de continuitate rezulta div v = 0 si atunci :∫
V
div v dv = 0 , integrala efectuandu-se pe domeniul ocupat de fluid ın rezervor. Trecand cu
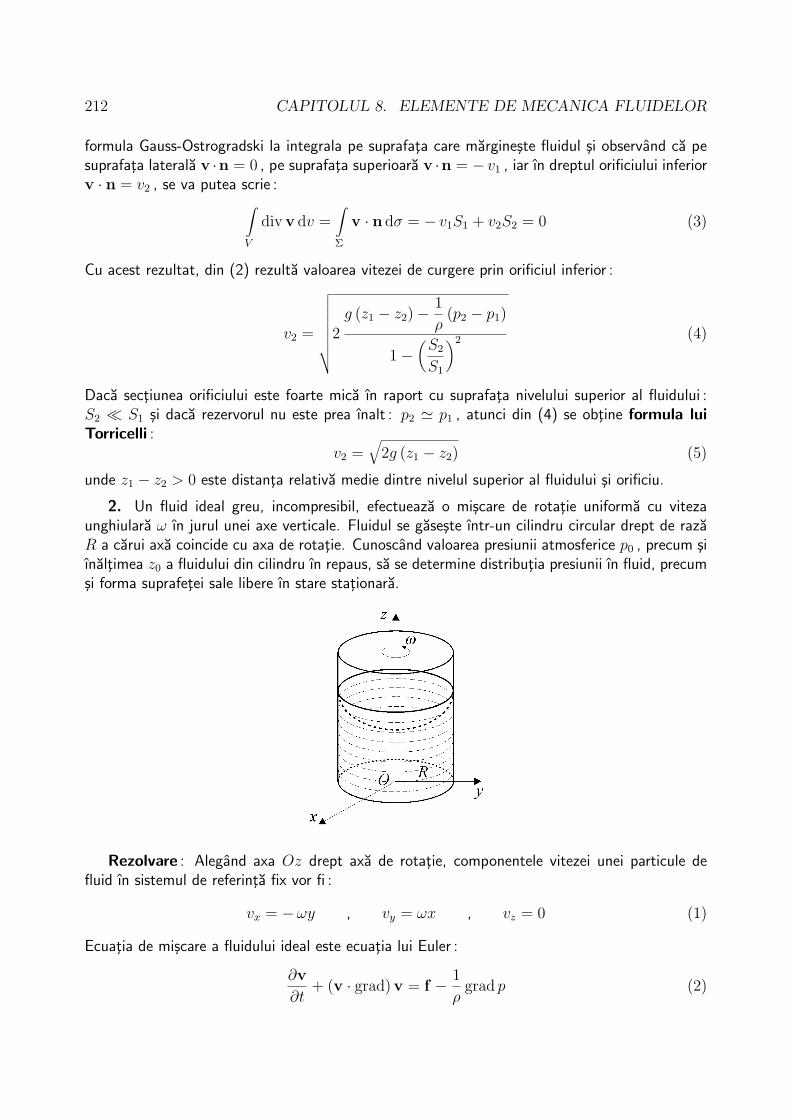
212 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
formula Gauss-Ostrogradski la integrala pe suprafata care margineste fluidul si observand ca pesuprafata laterala v ·n = 0 , pe suprafata superioara v ·n = − v1 , iar ın dreptul orificiului inferiorv · n = v2 , se va putea scrie :
∫
V
div v dv =∫
Σ
v · n dσ = − v1S1 + v2S2 = 0 (3)
Cu acest rezultat, din (2) rezulta valoarea vitezei de curgere prin orificiul inferior :
v2 =
√√√√√√√√2
g (z1 − z2)− 1
ρ(p2 − p1)
1−(
S2
S1
)2 (4)
Daca sectiunea orificiului este foarte mica ın raport cu suprafata nivelului superior al fluidului :S2 ¿ S1 si daca rezervorul nu este prea ınalt : p2 ' p1 , atunci din (4) se obtine formula luiTorricelli :
v2 =√
2g (z1 − z2) (5)
unde z1 − z2 > 0 este distanta relativa medie dintre nivelul superior al fluidului si orificiu.
2. Un fluid ideal greu, incompresibil, efectueaza o miscare de rotatie uniforma cu vitezaunghiulara ω ın jurul unei axe verticale. Fluidul se gaseste ıntr-un cilindru circular drept de razaR a carui axa coincide cu axa de rotatie. Cunoscand valoarea presiunii atmosferice p0 , precum siınaltimea z0 a fluidului din cilindru ın repaus, sa se determine distributia presiunii ın fluid, precumsi forma suprafetei sale libere ın stare stationara.
Rezolvare : Alegand axa Oz drept axa de rotatie, componentele vitezei unei particule defluid ın sistemul de referinta fix vor fi :
vx = −ωy , vy = ωx , vz = 0 (1)
Ecuatia de miscare a fluidului ideal este ecuatia lui Euler :
∂v
∂t+ (v · grad)v = f − 1
ρgrad p (2)

8.2. FLUIDE IDEALE 213
In stare stationara∂v
∂t= 0 , iar forta masica ın cazul problemei este f(0, 0,−g) . Proiectand (2)
pe axele sistemului de referinta, rezulta ecuatiile :
1
ρ
∂p
∂x= ω2x ,
1
ρ
∂p
∂y= ω2y ,
1
ρ
∂p
∂z= − g (3)
Fluidul fiind incompresibil (ρ = const.), integrala generala a sistemului (3) va fi :
p
ρ=
1
2ω2
(x2 + y2
)− gz + C (4)
Acelasi rezultat putea fi obtinut scriind integrala Cauchy pentru miscarea potentiala izentropicastationara a unui fluid ideal incompresibil :
1
2v2 +
p
ρ+ V = C (5)
In cazul problemei, ecuatia (5) este adevarata doar ıntr-un sistem de referinta solidar legat defluidul aflat ın miscare de rotatie. In acest sistem de referinta v = 0 , iar fota totala care actioneaza
asupra particulei de fluid ft(ω2x, ω2y,−g) deriva din potentialul V = − 1
2ω2
(x2 + y2
)+ gz .
Din ecuatia (4) rezulta formula pentru distributia presiunii ın fluid :
p =1
2ρ ω2
(x2 + y2
)− ρgz + Cρ (6)
Facand aici p = p0 , se obtine ecuatia suprafetei libere a fluidului :
z =1
2
ω2
g
(x2 + y2
)− p0
ρg+
C
g(7)
Constanta C se determina observand ca fluidul fiind incompresibil, el ocupa acelasi volum atatın repaus, cat si ın cursul miscarii de rotatie uniforma. Folosind coodonate cilindrice, se obtine :
V = πR2z0 =
R∫
0
2π∫
0
z dσ = 2π
R∫
0
(1
2
ω2
gr2 − p0
ρg+
C
g
)r dr = πR2
(1
4
ω2
gR2 − p0
ρg+
C
g
)(8)
de unde rezulta :
C =p0
ρ− 1
4ω2R2 + gz0 (9)
Pentru distributia presiunii ın fluid se obtine ın final expresia :
p = p0 + ρg (z0 − z) +1
2ρω2
[(x2 + y2
)− R2
2
](10)
iar forma suprafetei libere va fi :
z = z0 +1
2
ω2
g
[(x2 + y2
)− R2
2
](11)
care reprezinta ecuatia unui paraboloid de rotatie ın jurul axei Oz . Inaltimea minima si ceamaxima pe care o atinge fluidul ın cilindru, rezulta facand x2 + y2 = 0 , respectiv x2 + y2 = R2 :
zmin = z0 − ω2R2
4 g, zmax = z0 +
ω2R2
4 g(12)

214 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
8.3 Miscari potentiale plane
Daca miscarea unui fluid se face astfel ıncat ın orice moment vitezele particulelor ce ılcompun sunt paralele cu un plan fix dat, iar distributia de viteze este aceeasi ın toate planeleparalele cu planul fix, se spune ca miscarea este plana . O astfel de miscare poate apare,de exemplu, la curgerea unui fluid ın jurul unui cilindru circular fix, atacat perpendicular pegereratoarele sale de un curent uniform la infinit. Conform definitiei, miscarea plana poatefi studiata ıntr-un singur plan, rezultatele obtinute fiind valabile ın toate planele paralele cuplanul considerat. Dupa cum se va vedea, studiul miscarilor plane are o importanta deosebita,deoarece apare posibilitatea folosirii functiilor de variabila complexa, ceea ce usureaza multcalculele ın special cand se cere determinarea miscarii unui fluid ın jurul unor obstacole dediverse profile. In cele ce urmeaza vor fi studiate doar miscarile potentiale stationareplane ale fluidelor ideale incompresibile .
Figura 8.1: Curgerea unui fluid ın jurul unui cilindru drept orizontal
Alegand ca plan de studiu al miscarii planul xOy , campul vitezelor particulelor va fidefinit de functiile vx(x, y) si vy(x, y) , iar traiectoriile particulelor, care coincid cu liniile decurent, vor fi solutii ale ecuatiei diferentiale :
dx
vx
=dy
vy
(8.65)
adica :
− vydx + vxdy = 0 (8.66)
Fluidul fiind incompresibil (ρ = const.), ecuatia de continuitate se reduce la div v = 0 , ceeace ın cazul miscarii plane ınseamna :
∂vx
∂x+
∂vy
∂y= 0 adica − ∂vy
∂y=
∂vx
∂x(8.67)

8.3. MISCARI POTENTIALE PLANE 215
Avand ın vedere ultima egalitate, rezulta ca membrul stang al ecuatiei (8.66) reprezintadiferentiala totala a unei functii ψ(x, y) pentru care :
∂ψ
∂x= − vy ,
∂ψ
∂y= vx (8.68)
si atunci ecuatia liniilor de curent se transcrie sub forma dψ = 0 , de unde rezulta prinintegrare :
ψ(x, y) = const. (8.69)
Functia ψ(x, y) poarta numele de functie de curent , denumirea fiind justificata de faptulca ın lungul unei linii de curent, functia ψ pastreza o valoare constanta, bine determinata dinconditiile initiale. Din (8.69) rezulta ca liniile de curent alcatuiesc ın planul xOy o familieuniparametrica de curbe, printr-un punct dat al planului putand trece doar o singura liniede curent. Ecuatia la care satisface functia de curent ψ se poate obtine folosind faptul ca
miscarea este presupusa potentiala. In acest caz vartejul ω =1
2rotv , care acum se reduce
la ωz =1
2
(∂vy
∂x− ∂vx
∂y
), trebuie sa fie nul ın toate punctele ocupate de fluid ale planului si
atunci folosind (8.68) rezulta ca :
∂2ψ
∂x2+
∂2ψ
∂y2= ∆ ψ = 0 (8.70)
Astfel, ın miscarea potentiala plana a fluidului incompresibil, functia de curent ψ satisfaceecuatia lui Laplace si deci este o functie armonica pe domeniul ocupat de fluid.
Pe de alta parte, dupa cum s-a vazut anterior, campul vitezelor ın miscarea potentiala aunui fluid poate fi determinat daca se cunoaste asa numitul potential de viteze , care esteintrodus prin definitia :
v = grad ϕ (8.71)
asa ıncat ω =1
2rotv = 0 , miscarea fiind lipsita de vartejuri. Daca miscarea este plana si
stationara, atunci ın general ϕ = ϕ(x, y) si componentele vitezei ın orice punct al planuluivor fi date de formulele :
vx =∂ϕ
∂x, vy =
∂ϕ
∂y(8.72)
Din ecuatia de continuitate (8.67) pentru fluidul incompresibil, rezulta direct ca potentialulde viteze satisface de asemenea ecuatia lui Laplace :
∂2ϕ
∂x2+
∂2ϕ
∂y2= ∆ ϕ = 0 (8.73)
Curbele din planul miscarii pentru care
ϕ(x, y) = const. (8.74)
se numesc curbe echipotentiale , ele unind punctele din planul xOy pentru care constantadin membrul drept al ecuatiei (8.74) are aceeasi valoare. Evident, printr-un punct dat alplanului poate trece doar o singura curba echipotentiala.

216 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
Se observa ca planul miscarii fluidului este acoperit de doua familii de curbe (8.69) si(8.74) , care formeaza o retea ortogonala, deoarece din relatiile (8.68) si (8.72) rezulta :
∂ϕ
∂x
∂ψ
∂x+
∂ϕ
∂y
∂ψ
∂y= 0 (8.75)
adica :nϕ · nψ = 0 (8.76)
unde cu n s-au notat versorii normalelor la curbele ϕ = const. si ψ = const. ın punctul ıncare acestea se intersecteaza. De obicei curbele echipotentiale se reprezinta grafic prin liniiıntrerupte, iar liniile de curent prin linii continue.
Prin compararea relatiilor (8.68) si (8.72) se ajunge la concluzia importanta ca potentialulde viteze ϕ(x, y) si functia de curent ψ(x, y) care caracterizeaza miscarea potentiala plana,satisfac la conditiile Cauchy-Riemann :
∂ϕ
∂x=
∂ψ
∂y,
∂ϕ
∂y= − ∂ψ
∂x(8.77)
fiind astfel functii armonice conjugate. Se stie din analiza ca conditiile (8.77) reprezintaconditiile necesare si suficiente pentru ca functia f(z) de variabila complexa z = x + i yavand forma :
f(z) = ϕ(x, y) + i ψ(x, y) , z = x + i y ; i =√−1 (8.78)
sa fie analitica (monogena) ın raport cu z . Functia f(z) poarta numele de potential com-plex al miscarii . In consecinta, unei miscari potentiale plane i se poate asocia ıntotdeaunao functie analitica f(z) de variabila complexa. Invers, daca se da o functie analitica arbi-trara de variabila complexa, ea poate corespunde unei miscari potentiale plane a unui fluidincompresibil, partea sa reala ϕ reprezentand potentialul de viteze, iar partea sa imaginaraψ functia de curent.
Functia f(z) fiind analitica, va avea ın fiecare punct o derivata bine determinata :
df
dz=
∂ϕ
∂x+ i
∂ψ
∂x= vx − i vy (8.79)
care poarta numele de viteza complexa a miscarii , deoarece este complex conjugataexpresiei complexe a vitezei vx + i vy . Pentru modulul |v| ≡ v al vitezei fluidului rezultaformula :
v = |v| =√
v2x + v2
y =
∣∣∣∣∣df
dz
∣∣∣∣∣ (8.80)
Cunoscand potentialul complex f(z) si calculand derivatadf
dz, pot fi determinate compo-
nentele vx si vy ale vitezei.Din cele expuse rezulta clar avantajele folosirii functiilor de variabila complexa la studiul
miscarilor potentiale plane. Daca se cunoaste potentialul complex f(z) al miscarii, atunciprin separarea partii reale de cea imaginara se pot obtine functiile ϕ(x, y) si ψ(x, y) care per-
mit trasarea curbelor echipotentiale si a liniilor de curent, iar ın urma calculului derivateidf
dz

8.3. MISCARI POTENTIALE PLANE 217
se poate determina direct repartitia vitezelor. Potentialul complex poate fi determinat, celputin ın principiu, daca se precizeaza domeniul ın care are loc miscarea, precum si conditiilela limita pentru viteze, ınsa metoda este destul de laborioasa. Din acest motiv este prefe-rata o metoda indirecta, ın care se presupune cunoscuta forma potentialului complex f(z) ,urmand ca ın functie de alegerea facuta, sa fie stabilite caracteristicile miscarii potentialeplane a fluidului.
1. Pentru ınceput se studiaza potentialul complex :
f(z) = a
(z +
R2
z
)(8.81)
unde a si R sunt niste constante reale. Se observa ca miscarea este definita pe tot planul, cuexceptia originii O care este un punct singular pentru f(z) . Facand z = x+ i y si f = ϕ+ i ψrezulta :
ϕ + i ψ = a
[(x + i y) + R2 x− i y
x2 + y2
]= ax
(1 +
R2
x2 + y2
)+ i ay
(1− R2
x2 + y2
)(8.82)
potentialul de viteze si functia de curent avand astfel expresiile :
ϕ(x, y) = ax
(1 +
R2
x2 + y2
), ψ(x, y) = ay
(1− R2
x2 + y2
)(8.83)
Curbele ϕ = const. si ψ = const. se pot trasa prin puncte. Linia de curent ψ = 0 estealcatuita din cercul de ecuatie x2 + y2 = R2 si axa Ox , iar liniile de curent de la infinitsunt niste drepte paralele cu axa Ox . Inlocuind linia de curent circulara de raza R cu uncorp rigid (eliminand astfel si originea O), rezulta imaginea curgerii fluidului ın jurul unuicilindru circular infinit fix.
Figura 8.2: Curgerea potentiala a unui fluid ın jurul unui cilindru circular infinit
Pentru a gasi distributia de viteze vx si vy ın plan, se calculeaza derivata :
df
dz= a
(1− R2
z2
)(8.84)

218 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
si atunci :
vx − i vy = a
[1−R2 (x− i y)2
(x2 + y2)2
]= a
[1−R2 x2 − y2
(x2 + y2)2
]+ i 2aR2 xy
(x2 + y2)2 (8.85)
Componentele vitezei unei particule de fluid ıntr-un punct (x, y) vor fi :
vx = a
[1−R2 x2 − y2
(x2 + y2)2
]= a
(1− R2
r2cos 2θ
)
vy = − 2aR2 xy
(x2 + y2)2 = − aR2
r2sin 2θ
(8.86)
unde din motive de simetrie a problemei s-a trecut la coordonatele polare x = r cos θ ,y = r sin θ . Marimea vitezei va fi :
v = |v| = a
√√√√(
1− R2
r2
)2
+ 4R2
r2sin2 θ (8.87)
Se observa ca pentru r → ∞ rezulta vx = a , vy = 0 , |v| = a , adica la infinit fluidul segaseste ın miscare de translatie uniforma, directia miscarii fiind data de semnul constanteia . Pe cercul de raza R :
vx = a (1− cos 2θ) , vy = − a sin 2θ ; |v| = 2a sin θ (8.88)
ceea ce ınseamna ca pentru θ = 0 , π rezulta vx = vy = 0 , |v| = 0 , punctele respective de
pe cerc fiind numite puncte de oprire , iar pentru θ =π
2,
3π
2rezulta vx = 2a , vy = 0 ,
|v| = 2a , ın punctele corespunzatoare de pe cerc viteza fluidului fiind maxima si dubla fatade viteza de la infinit.
Se poate verifica direct ca ın toate punctele domeniului ocupat de fluid, vartejul ωz = 0si de asemenea ca circulatia vitezei pe orice contur ınchis este nula.
Pentru a calcula forta de presiune cu care fluidul actioneaza asupra unitatii de lungimea cilindrului va fi aplicata definitia generala :
F = −∮
C
pn ds = −2π∫
0
pnR dθ (8.89)
unde conturul C este cercul de raza R . Utilizand integrala lui Cauchy ın care sunt neglijatefortele masice (f = − grad V ' 0) :
1
2v2 +
p
ρ=
1
2v2∞ +
p∞ρ
, ρ = const. (8.90)
si tinand cont de (8.88), se obtine :
p = p∞ +ρ
2
(v2∞ − v2
)= p∞ +
ρa2
2
(1− 4 sin2 θ
)(8.91)

8.3. MISCARI POTENTIALE PLANE 219
Inlocuind (8.91) ın (8.89) rezulta dupa calcule elementare :
Fx = −R
2π∫
0
p cos θ dθ = 0 , Fy = −R
2π∫
0
p sin θ dθ = 0 (8.92)
adica forta de presiune cu care fluidul actioneaza ın directia miscarii, asupra cilindrului fix,este nula. Rezultatul este cunoscut sub numele de paradoxul lui d’Alembert si el sedatoreste faptului ca ın calcule s-a neglijat viscozitatea fluidului din stratul aflat ın imediatavecinatate a cilindrului. In realitate, fluidul fiind vascos, miscarea are loc cu desprinderide pe corp si cu formare de vartejuri ın spatele corpului, ceea ce face ca cilindrul sa opunarezistenta la curgerea fluidului.
2. Studiem acum miscarea descrisa de potentialul complex :
f(z) =Γ
2πiln z (8.93)
unde Γ este o constanta reala. Folosind forma trigonometrica a numerelor complexe z = r eiθ ,se poate calcula usor potentialul de viteze si functia de curent :
ϕ + i ψ =Γ
2πi(ln r + i θ) =
Γ
2πθ − i
Γ
2πln r (8.94)
si atunci :
ϕ =Γ
2πθ , ψ = − Γ
2πln r (8.95)
Rezulta ca liniile echipotentiale sunt niste drepte concurente ın origine, iar liniile de curentsunt cercuri concentrice.
Figura 8.3: Rotatia unui fluid ın jurul originii datorata unui vartej punctiform
Se observa ca desi functia f(z) este multiforma deoarece r eiθ = r ei(θ+2kπ) , derivataacesteia :
df
dz=
Γ
2πi
1
z(8.96)

220 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
este o functie uniforma si ın consecinta functia (8.93) defineste ın mod univoc campul deviteze al miscarii fluidului. La scrierea potentialului de viteze ϕ s-a folosit doar valoareaprincipala a logaritmului care corespunde lui k = 1 , asa ca ın realitate si potentialul deviteze este tot o functie multiforma, ınsa functia de curent ψ este ıntotdeauna uniforma.
Facand z = x + i y , din (8.96) rezulta :
vx − i vy =Γ
2πi
x− i y
x2 + y2= − Γ
2π
y
x2 + y2− i
Γ
2π
x
x2 + y2(8.97)
adica :
vx = − Γ
2π
y
x2 + y2= − Γ
2πrsin θ , vy =
Γ
2π
x
x2 + y2=
Γ
2πrcos θ (8.98)
unde s-au folosit din nou coordonatele polare (r, θ). Viteza particulei de fluid ıntr-un punctoarecare al planului va fi :
v =Γ
2πr(− sin θ i + cos θ j) =
Γ
2πrτ , v = |v| = |Γ|
2πr(8.99)
Se observa ca viteza, care este orientata dupa tangenta ın fiecare punct la linia de curent careeste un cerc, are pentru un r dat o marime constanta si astfel nu are o componenta radiala.Sensul miscarii este direct sau retrograd, dupa cum Γ > 0 sau Γ < 0 . In originea r = 0marimea vitezei este infinita si ea devine nula cand r →∞ . De asemenea, ın toate punctele
planului vartejul ωz =1
2(rotv)z este nul, cu exceptia originii. Se spune ca ın origine avem
un vartej punctiform si ca miscarea descrisa de potentialul complex (8.93) este o miscarede rotatie ın jurul originii datorata acestui vartej punctiform. Deosebirea fata de miscareade rotatie a unui rigid consta ın aceea ca viteza ın fluid este invers proportionala cu distantar la axa de rotatie Oz . Daca una din liniile de curent este ınlocuita cu un perete rigidcilindric, rezulta o miscare circulara a fluidului ın jurul cilindrului respectiv.
Semnificatia constantei Γ rezulta calculand circulatia vitezei pe un cerc de raza r careınconjoara originea. Rezultatul va trebui sa fie diferit de zero, deoarece conturul ınchisconsiderat contine vartejul punctiform nenul din origine (ın acest caz circulatia vitezei ar finula doar daca conturul nu ar contine originea!). Tinand cont de (8.99) se obtine :
∮
C
v δr =∮
C
Γ
2πrds =
Γ
2π
2π∫
0
dθ = Γ (8.100)
deoarece ds = r dθ . Constanta Γ nu a fost notata ıntamplator astfel, deoarece ea aresemnificatia circulatiei vitezei pe o linie de curent ınchisa care ınconjoara originea si repre-zinta cresterea potentialului de viteze ϕ atunci cand θ creste cu 2π .
3. In fine, examinam si potentialul complex compus din potentialele (8.81) si (8.93) :
f(z) = a
(z +
R2
z
)+
Γ
2πiln z (8.101)
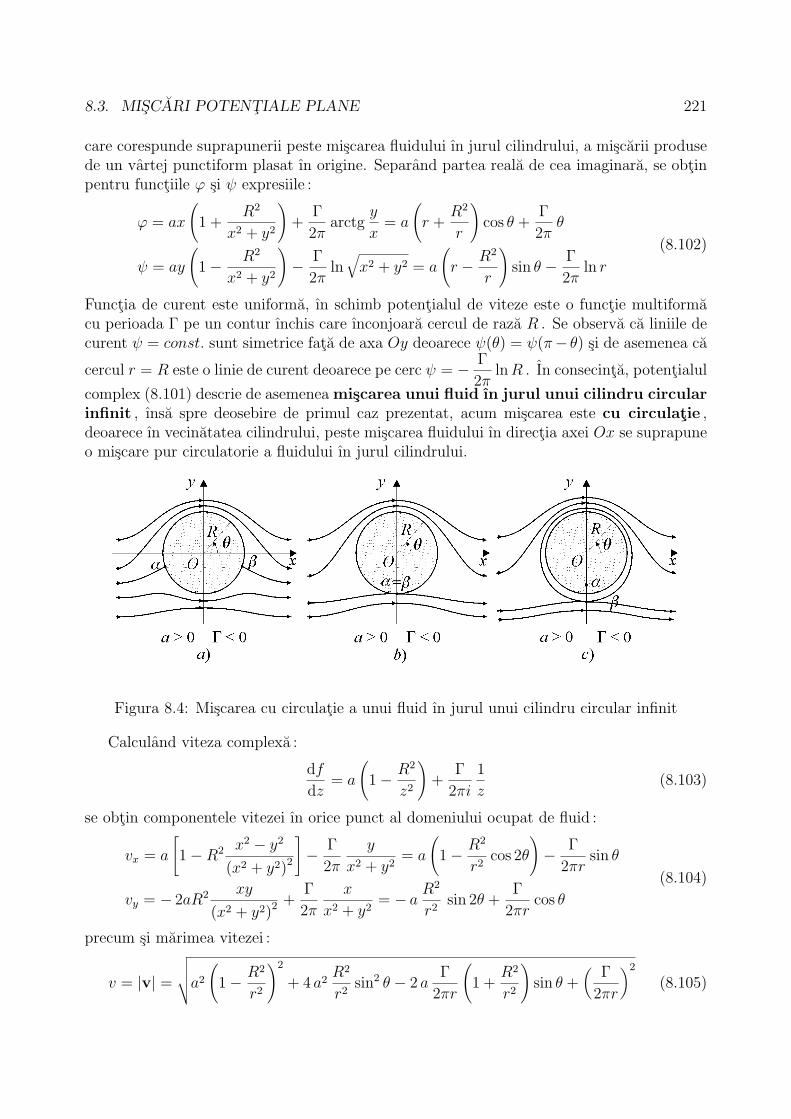
8.3. MISCARI POTENTIALE PLANE 221
care corespunde suprapunerii peste miscarea fluidului ın jurul cilindrului, a miscarii produsede un vartej punctiform plasat ın origine. Separand partea reala de cea imaginara, se obtinpentru functiile ϕ si ψ expresiile :
ϕ = ax
(1 +
R2
x2 + y2
)+
Γ
2πarctg
y
x= a
(r +
R2
r
)cos θ +
Γ
2πθ
ψ = ay
(1− R2
x2 + y2
)− Γ
2πln
√x2 + y2 = a
(r − R2
r
)sin θ − Γ
2πln r
(8.102)
Functia de curent este uniforma, ın schimb potentialul de viteze este o functie multiformacu perioada Γ pe un contur ınchis care ınconjoara cercul de raza R . Se observa ca liniile decurent ψ = const. sunt simetrice fata de axa Oy deoarece ψ(θ) = ψ(π− θ) si de asemenea ca
cercul r = R este o linie de curent deoarece pe cerc ψ = − Γ
2πln R . In consecinta, potentialul
complex (8.101) descrie de asemenea miscarea unui fluid ın jurul unui cilindru circularinfinit , ınsa spre deosebire de primul caz prezentat, acum miscarea este cu circulatie ,deoarece ın vecinatatea cilindrului, peste miscarea fluidului ın directia axei Ox se suprapuneo miscare pur circulatorie a fluidului ın jurul cilindrului.
Figura 8.4: Miscarea cu circulatie a unui fluid ın jurul unui cilindru circular infinit
Calculand viteza complexa :
df
dz= a
(1− R2
z2
)+
Γ
2πi
1
z(8.103)
se obtin componentele vitezei ın orice punct al domeniului ocupat de fluid :
vx = a
[1−R2 x2 − y2
(x2 + y2)2
]− Γ
2π
y
x2 + y2= a
(1− R2
r2cos 2θ
)− Γ
2πrsin θ
vy = − 2aR2 xy
(x2 + y2)2 +Γ
2π
x
x2 + y2= − a
R2
r2sin 2θ +
Γ
2πrcos θ
(8.104)
precum si marimea vitezei :
v = |v| =√√√√a2
(1− R2
r2
)2
+ 4 a2R2
r2sin2 θ − 2 a
Γ
2πr
(1 +
R2
r2
)sin θ +
(Γ
2πr
)2
(8.105)

222 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
Pentru r → ∞ rezulta vx = a , vy = 0 , |v| = a , ceea ce ınseamna ca la infinit fluidul segaseste ın miscare de translatie uniforma, directia miscarii fiind data de semnul constanteia . Pe cercul de raza r = R va trebui ca :
vx = a (1− cos 2θ)− Γ
2πRsin θ
vy = − a sin 2θ +Γ
2πRcos θ
, v = |v| = 2 a sin θ − Γ
2πR(8.106)
Din ultima expresie rezulta ca punctele de oprire de pe cerc, ın care viteza fluidului estenula, se obtin din ecuatia :
sin θ =Γ
4πaR(8.107)
Presupunand ca a > 0 si Γ < 0 sunt posibile urmatoarele trei situatii (v. Fig. 8.4):a. |Γ| < 4πaR : cele doua puncte de oprire se gasesc pe semicercul inferior si sunt simetrice
fata de Oy , iar ın aceste puncte liniile de curent sunt normale la cerc ;b. |Γ| = 4πaR : cele doua puncte de oprire sunt confundate si se gasesc la intersectia
semicercului inferior cu axa Oy ;c. |Γ| > 4πaR : cele doua puncte de oprire se gasesc pe semiaxa imaginara negativa, unul
interior, iar celalalt exterior cercului.Se observa ca ın comparatie cu miscarea descrisa de potentialul complex (8.81), cea
descrisa de potentialul complex (8.101) nu mai este simetrica fata de axa Ox , iar punctelede oprire α si β se deplaseaza ın semiplanul inferior. De asemenea circulatia vitezei pe cerculde raza R este diferita de zero :
∮
C
v δr =
2π∫
0
(vθ)r=R R dθ = Γ 1 (8.108)
ınsa circulatia pe un contur ınchis care nu ınconjoara cercul ramane ın continuare nula.Calculam si ın acest caz forta de presiune cu care fluidul actioneaza asupra unitatii de
lungime a cilindrului. Folosind integrala lui Cauchy ın care sunt neglijate fortele masice siexpresia (8.106c), rezulta :
p = p∞ +ρ
2
(v2∞ − v2
)= p∞ +
ρ
2
[a2
(1− 4 sin2 θ
)+
2aΓ
πRsin θ −
(Γ
2πR
)2]
(8.109)
Inlocuind rezultatul ın (8.89) se obtine ın final :
Fx = −∮
C
p nx ds = −R
2π∫
0
p cos θ dθ = 0
Fy = −∮
C
p ny ds = −R
2π∫
0
p sin θ dθ = − Rρ
2
2aΓ
πR
2π∫
0
sin2 θ dθ
︸ ︷︷ ︸π
= − ρaΓ(8.110)
1Miscarea fiind potentiala, componentele vitezei ın coordonate polare pot fi calculate folosind (8.102a):
vr =∂ϕ
∂r= a
(1− R2
r2
)cos θ , vθ =
1r
∂ϕ
∂θ= − a
(1 +
R2
r2
)sin θ +
Γ2πr

8.4. FLUIDE VASCOASE. FORMULA LUI STOKES 223
Se observa ca si ın acest caz componenta Fx este nula, ınsa acum forta de presiune rezultantacu care fluidul actioneaza asupra cilindrului este diferita de zero, ea avand o componentaFy 6= 0 . Aceasta forta poarta numele de portanta , caracteristicile sale fiind stabilite deteorema Kutta-Jukovski conform careia (v. (8.110b)) marimea portantei este |ρaΓ| , di-rectia ei este perpendiculara pe viteza a a fluidului la infinit, iar sensul ei este dat de semnulcirculatiei Γ (pentru a > 0 , daca Γ > 0 atunci Fy < 0 , iar daca Γ < 0 atunci Fy > 0).
Miscarea cu circulatie definita de potentialul (8.101) poate fi pusa ın evidenta experi-mental atunci cand se studiaza efectul Magnus . Pentru aceasta, se plaseaza un cilindrucircular drept ıntr-un fluid real aflat ın miscare de translatie uniforma de la stanga la dreapta.Daca cilindrul se roteste ın sens invers trigonometric, atunci datorita adeziunii si viscozitatiifluidului, ın jurul cilindrului ia nastere un curent pur circulator, care are acelasi sens cu cu-rentul de translatie ın semiplanul superior si se opune curentului de translatie ın semiplanulinferior. Deoarece ın regiunea din vecinatatea cilindrului viteza fluidului este mai mare ınsemiplanul superior decat ın cel inferior, conform integralei lui Cauchy, ıntre cele doua do-menii apare o diferenta de presiune, careia ıi corespunde o forta rezultanta care se calculeazacu relatia (8.110b) si care este dirijata vertical spre domeniul unde viteza fluidului este maimare si presiunea este mai mica.
8.4 Fluide vascoase. Formula lui Stokes
Proprietatea de viscozitate a unui fluid, care se manifesta prin existenta unei rezistentela alunecarea particulelor unele peste altele, se datoreste faptului ca ın cursul miscarii par-ticulele de fluid sufera deformatii care determina aparitia unor tensiuni suplimentare avandcomponente tangentiale diferite de zero. Tinand cont de faptul ca ın starea de repaus ten-siunile trebuie sa se reduca la presiuni, legea constitutiva a fluidului vascos a fost scrisa subforma :
Tik = −(p +
2
3η div v
)δik + 2 η vik ; i, k = 1, 2, 3 (8.111)
unde η este coeficientul de viscozitate, iar vik ; i, k = 1, 2, 3 sunt componentele tensoruluiviteza de deformatie :
vik =1
2
(∂vi
∂xk
+∂vk
∂xi
); i, k = 1, 2, 3 (8.112)
Folosind aceste expresii au fost deduse ecuatiile de miscare ale lui Navier-Stokes pentrufluidul vascos :
dv
dt= f − 1
ρgrad p +
η
ρ∆v +
1
3
η
ρgrad div v (8.113)
care, ımpreuna cu ecuatia de continuitate a masei si ecuatia caracteristica, permit determi-narea starii de miscare a fluidului, daca sunt date conditiile initiale si la limita ale problemei.
Ecuatiile Navier-Stokes formeaza un sistem neliniar de ecuatii diferentiale cu derivatepartiale si se cunosc putine solutii exacte ale lor. Totusi, ın anumite conditii, aceste ecuatiipot fi aduse la o forma mult mai simpla. Astfel, daca fluidul este incompresibil (div v = 0),atunci tensorul tensiunilor devine :
Tik = − p δik + 2 η vik ; i, k = 1, 2, 3 (8.114)

224 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
iar ecuatiile Navier-Stokes, ın caredv
dt=
∂v
∂t+ (v · grad)v =
∂v
∂t+ grad
(1
2v2
)− v × rotv ,
se scriu :
∂v
∂t+ grad
(1
2v2
)− v × rotv = f − 1
ρgrad p +
η
ρ∆v , ρ = const. (8.115)
Daca se presupune ın plus ca miscarea este stationara si lenta , atunci pe de o parte∂v
∂t= 0 , iar pe de alta parte, deoarece termenii neliniari din membrul stang sunt cu un
ordin de marime mai mici decat ultimul termen din membrul drept, acestia pot fi neglijati.Ecuatiile (8.115) se reduc astfel la :
grad p = ρ f + η ∆v , ρ = const. (8.116)
care sunt numite ecuatiile liniarizate ale lui Stokes . Daca fortele masice sunt neglijabile(f ' 0), ecuatiile capata o forma si mai simpla :
grad p = η ∆v , ρ = const. (8.117)
Aceste ecuatii sunt folosite pentru a studia miscarea stationara lenta a unui fluid vascosincompresibil ın jurul unei sfere rigide imobile de raza R , cunoscand ca la infinit vitezafluidului este u . Se mai presupune ca fluidul adera la sfera considerata, astfel ıncat vitezeleparticulelor pe sfera sunt nule. Conditiile la limita ale problemei vor fi astfel :
v∣∣∣R
= 0 , v∣∣∣∞ = u (8.118)
Campul vitezelor poate fi determinat observand ca daca se aplica ambilor membri aiecuatiei (8.117) operatorul rotor si cunoscand faptul ca rot grad ψ = 0 , necunoscuta p poatefi eliminata :
rot ∆v = 0 (8.119)
Folosind formula cunoscuta din analiza vectoriala :
∆v = grad div v − rot rotv (8.120)
si tinand cont ca div v = 0 , ecuatiile (8.119) mai pot fi scrise si sub forma :
rot rot rotv = 0 (8.121)
Aceste ecuatii, ımpreuna cu ecuatia de continuitate
div v = 0 (8.122)
si cu conditiile la limita (8.118) permit determinarea distributiei vitezelor ın toate punctelespatiului ocupat de fluid.
Forma generala a solutiei este sugerata de ınsasi datele problemei, a carei simetrie impunefolosirea coordonatelor sferice. Alegand originea sistemului de coordonate ın centrul sferei siorientand axa polara Oz ın lungul directiei vitezei u a fluidului la infinit, se observa ca :
vr = vr(r, θ) , vθ = vθ(r, θ) , vϕ = 0 (8.123)

8.4. FLUIDE VASCOASE. FORMULA LUI STOKES 225
Figura 8.5: Curgerea lenta stationara a unui fluid vascos ın jurul unei sfere imobile
Deoarece conditiile la limita la infinit (8.118b) impun ca :
vr
∣∣∣∞ = u cos θ , vθ
∣∣∣∞ = −u sin θ (8.124)
solutia generala a sistemului de ecuatii (8.121) si (8.122) va fi cautata sub forma :
vr = u f(r) cos θ , vθ = u g(r) sin θ , vϕ = 0 (8.125)
unde f(r) si g(r) sunt doua functii necunoscute care urmeaza sa fie determinate asa ıncat :
f(R) = g(R) = 0 ; f(∞) = 1 , g(∞) = −1 (8.126)
Facand ın ecuatia (8.121) substitutia ω =1
2rotv , unde ω este vectorul viteza unghiulara
a particulei si tinand cont de expresiile componentelor rotorului unui vector ın coordonatesferice2, pentru componentele vectorului ω rezulta :
ωr = ωθ = 0 , ωϕ =u
2
h(r)
rsin θ (8.127)
unde s-a tinut cont de (8.125) si s-a introdus o noua functie necunoscuta :
h(r) = f(r) +d
dr[ r g(r)] (8.128)
2Expresiile operatorilor diferentiali ın coordonate sferice :
gradψ =∂ψ
∂rer +
1r
∂ψ
∂θeθ +
1r sin θ
∂ψ
∂ϕeϕ
div V =1r2
∂
∂r
(r2Vr
)+
1r sin θ
∂
∂θ(Vθ sin θ) +
1r sin θ
∂Vϕ
∂ϕ
rotV =1
r sin θ
[∂
∂θ(Vϕ sin θ)− ∂Vθ
∂ϕ
]er +
1r
[1
sin θ
∂Vr
∂ϕ− ∂
∂r(rVϕ)
]eθ +
1r
[∂
∂r(rVθ)− ∂Vr
∂θ
]eϕ
∆ ψ =1r2
∂
∂r
(r2 ∂ψ
∂r
)+
1sin θ
[∂
∂θ
(sin θ
∂ψ
∂θ
)+
1sin θ
∂2ψ
∂ϕ2
]

226 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
Facand ın continuare substitutia :ε = rot ω (8.129)
si tinand cont de (8.127), componentele vectorului ε vor avea expresiile :
εr = uh
r2cos θ , εθ = − u
2
h′
rsin θ , εϕ = 0 (8.130)
In fine, se calculeaza prin aceeasi metoda componentele vectorului rot ε . Folosind expresiile(8.130) rezulta :
(rot ε)r = (rot ε)θ = 0 , (rot ε)ϕ = − u
2
1
2
(h′′ − 2h
r2
)sin θ (8.131)
Procedand ın modul indicat mai sus, ecuatia de miscare (8.121) a capatat forma finalarot ε = 0 , adica ecuatia diferentiala de ordinul doi :
r2 d2h
dr2− 2 h = 0 (8.132)
Cautand o solutie a acestei ecuatii sub forma h = rn , se observa ca unica solutie care seanuleaza la infinit este :
h(r) =C
r(8.133)
unde C este o constanta. Avand ın vedere (8.128), s-a obtinut o ecuatie care contine functiilenecunoscute f(r) si g(r) :
f +d
dr(r g) =
C
r(8.134)
O alta ecuatie pentru functiile f(r) si g(r) se obtine pornind de la ecuatie de continuitate(8.122) transcrisa ın coordonate sferice, ın care se fac ınlocuirile (8.125) :
d
dr
(r2f
)+ 2 r g = 0 (8.135)
Se poate verifica direct ca solutia sistemului de ecuatii diferentiale de ordinul ıntai (8.134)si (8.135) este reprezentata de functiile :
f(r) = −C1 − 2C2
r+
2C3
r3, g(r) = C1 +
C2
r+
C3
r3(8.136)
daca C2 = − C
2. Impunand conditiile la limita (8.126) pentru functiile f(r) si g(r) , rezulta
valorile constantelor C1, C2, C3 :
C1 = − 1 , C2 =3R
4, C3 =
R3
4(8.137)
In consecinta, componentele vitezei ın orice punct al spatiului ocupat de fluid vor fi date deexpresiile :
vr = u
[1− 3
2
R
r+
1
2
(R
r
)3]
cos θ , vθ = −u
[1− 3
4
R
r− 1
4
(R
r
)3]
sin θ , vϕ = 0 (8.138)

8.4. FLUIDE VASCOASE. FORMULA LUI STOKES 227
Distributia valorilor presiunii se obtine din ecuatia (8.117) care, folosind (8.120), (8.122)si observand ca rot rotv = 2 rot ω = 2 ε , se va scrie :
grad p = −2 η ε (8.139)
Folosind expresiile componentelor gradientului ın coordonate sferice si tinand cont de com-ponentele vectorului ε (v. (8.130) si (8.133)) , din (8.139) rezulta sistemul de ecuatii :
∂p
∂r= 3 u R η
cos θ
r3
1
r
∂p
∂θ=
3
2u R η
sin θ
r3
(8.140)
Solutia sistemului (8.140) este evidenta :
p = p∞ − 3
2uR η
cos θ
r2(8.141)
Pentru a calcula forta totala cu care fluidul vascos actioneaza asupra sferei, vor trebuicalculate ın prealabil componentele tensiunilor ce actioneaza pe unitatea de suprafata. Por-
nind de la expresia generala Tni =3∑
k=1
Tiknk ; i = 1, 2, 3 si observand ca ın orice punct de pe
sfera versorul normalei ın coordonate sferice este n = n(1, 0, 0) , se obtine succesiv :
T snr = T s
rrnr = T srr = − ps + 2 η vs
rr
T snθ = T s
θrnr = T sθr = 2 η vs
θr
T snϕ = T s
ϕrnr = T sϕr = 2 η vs
ϕr
(8.142)
unde indexul s indica faptul ca marimile respective sunt calculate ıntr-un punct situat pesfera r = R . Introducand ın expresiile componentelor tensorului viteza de deformatie ıncoordonate sferice3 solutia generala (8.138), rezulta :
vrr =u
r
[3
2
R
r− 3
2
(R
r
)3]
cos θ , vθr = − u
r
[1− 3
4
R
r+
1
2
(R
r
)3]
sin θ , vϕr = 0 (8.143)
de unde, facand r = R , se obtin expresiile :
vsrr = 0 , vs
θr = − 3
4
u
Rsin θ , vs
ϕr = 0 (8.144)
3Componentele tensorului viteza de deformatie ın coordonate sferice :
vrr =∂vr
∂r, vθθ =
1r
∂vθ
∂θ+
vr
r, vϕϕ =
1r sin θ
∂vϕ
∂ϕ+
vθctg θ
r+
vr
r
vrθ = vθr =12
(1r
∂vr
∂θ+
∂vθ
∂r− vθ
r
)
vrϕ = vϕr =12
(1
r sin θ
∂vr
∂ϕ+
∂vϕ
∂r− vϕ
r
)
vθϕ = vϕθ =12
(1
r sin θ
∂vθ
∂ϕ+
1r
∂vϕ
∂θ− vϕctg θ
r
)

228 CAPITOLUL 8. ELEMENTE DE MECANICA FLUIDELOR
Inlocuind aceste rezultate ın (8.142) si tinand cont de (8.141) rezulta :
T snr = − p∞ +
3
2
u
Rη cos θ , T s
nθ = − 3
2
u
Rη sin θ , T s
nϕ = 0 (8.145)
Din motive de simetrie, apare evident ca forta totala F cu care fluidul actioneaza asuprasferei are o componenta nenula doar dupa axa polara Oz . Proiectand tensiunile (8.145) peaxa Oz si integrand pe suprafata sferei (dσ = 2πR2 sin θ dθ) va rezulta :
Fz =
π∫
0
(T snr cos θ − T s
nθ sin θ) 2πR2 sin θ dθ =
= 2πR2
π∫
0
(p∞ − 3
2
u
Rη cos θ
)cos θ d(cos θ)− 2πR2
π∫
0
3
2
u
Rη
(1− cos2 θ
)d(cos θ) =
= 2π u R η + 4π u R η = 6π u R η (8.146)
Rezultatul obtinut poarta numele de formula lui Stokes si exprima valoarea fortei cucare un fluid vascos aflat ın miscare uniforma lenta actioneaza asupra unei sfere fixe aflata ıninteriorul fluidului. Se observa ca doar o treime din Fz se datoreste contributiei tensiunilornormale, restul de doua treimi din Fz provenind din contributia tensiunilor tangentiale.
II.Mecanica analitica

Capitolul 9
Bazele mecanicii analitice
Din cele cunoscute rezulta clar limitele formalismului newtonian. Daca pentru punctulmaterial liber, sau chiar supus la legaturi, apare posibila determinarea miscarii, care ın esentaeste o problema de matematica, prin trecerea la studiul miscarii sistemelor de puncte mate-riale, problema devine suficient de complexa, datorita numarului foarte mare de necunoscutecare urmeaza a fi determinate. Folosirea teoremelor generale poate servi la cunoasterea unorproprietati ale miscarii sistemului pe traiectorie, dar determinarea propriu-zisa a miscariiramane o problema deschisa, chiar ın cazul unor sisteme relativ simple. Este evident caformalismul folosit este prea ”sarac”, motiv pentru care daca sunt studiate probleme com-plexe de miscare ale unor sisteme supuse la legaturi, fara a iesi din limitele mecanicii clasicestabilite de principiile Galilei-Newton, va trebui modificat radical modul de abordare, prinprecizarea sau chiar redefinirea unor concepte de baza, ceea ce are consecinte directe si asupraformalismului matematic utilizat.
9.1 Legaturi si deplasari
Se studiaza miscarea unui sistem de N puncte materiale Pi(mi, ri) ; i = 1, . . . , N , unpunct al sistemului avand masa mi si vectorul de pozitie ri ın raport cu un sistem de referintainertial Oxyz . Rezultanta tuturor fortelor exterioare si interioare care actioneaza asuprapunctului Pi va fi notata cu Fi . Pozitia (r) a sistemului la un moment dat va fi precizatade ansamblul vectorilor de pozitie (r1, r2, . . . , rN) , iar viteza (r) a sistemului la un momentdat va fi precizata de ansamblul vectorilor viteza (r1, r2, . . . , rN) .
Va fi numita legatura, orice restrictie de natura geometrica sau cinematicacare se impune asupra sistemului . Daca sistemului nu i se impune nici o restrictie, elva fi numit sistem liber , ın caz contrar el fiind numit sistem cu legaturi .
Restrictia ca pentru un t dat, sistemul sa nu poata ocupa ın spatiu decat o pozitie permisade ecuatia generala :
f(t, r) = 0 adica f(t, r1, r2, . . . , rN) = 0 (9.1)
va fi numita legatura geometrica , sau finita . Restrictia ca pentru un t dat si o pozitiedata, sistemul sa nu poata avea orice viteza, ci doar o viteza permisa de ecuatia generala :
g(t, r, r) = 0 adica f(t, r1, . . . , rN , r1, . . . , rN) = 0 (9.2)
231

232 CAPITOLUL 9. BAZELE MECANICII ANALITICE
va fi numita legatura cinematica , sau diferentiala. In cele ce urmeaza, vor fi luate ınconsiderare doar acele legaturi cinematice, care sunt exprimate sub forma unei dependenteliniare ın raport cu vitezele punctelor care alcatuiesc sistemul :
N∑
i=1
Ai · ri + At = 0 unde
Ai = Ai(t, r) ; i = 1, . . . , N
At = At(t, r)(9.3)
Este evident ca ın (9.3) nu toti coeficoentii Ai ; i = 1, . . . , N pot fi simultan nuli, deoareceın caz contrar legatura ar fi geometrica. Pentru nevoile curente de calcul este suficientsa se presupuna ca functiile f si g care definesc legaturile sunt de clasa C2, iar functiileAi ; i = 1, . . . , N si At sunt de clasa C1 .
Se observa ca orice legatura finita (9.1) poate fi scrisa sub forma unei legaturi diferentialeliniare de tipul (9.3), deoarece efectuand derivata totala dupa timp a functiei din ecuatia
(9.1) rezultadf
dt=
N∑
i=1
∇if · ri +∂f
∂t= 0 , adica :
N∑
i=1
∂f
∂ri
· ri +∂f
∂t= 0 (9.4)
unde s-a facut notatia :
∇if =∂f
∂xi
i +∂f
∂yi
j +∂f
∂zi
k ≡ ∂f
∂ri
(9.5)
Reciproca acestei afirmatii nu este valabila, deoarece nu orice legatura diferentiala poatefi pusa sub forma unei legaturi finite. Legaturile diferentiale care pot fi puse sub formafinita sunt numite legaturi integrabile, caz ın care ıntre coeficientii Ai ; i = 1, . . . , N si At
trebuie sa existe relatii bine determinate. Intr-adevar, scriind (9.3) sub forma :
N∑
i=1
Aidri + Atdt = 0 (9.6)
membrul stang al acestei ecuatii va reprezenta o forma diferentiala liniara (forma Pfaff) de
3N + 1 variabile δΠ3N+1 =3N+1∑
k=1
Xkdxk , unde Xk = Xk(x1, . . . , x3N+1) ; k = 1, . . . , 3N + 1 .
Daca exista functia µ(x1, . . . , x3N+1) numita factor integrant, asa ıncat produsul acesteiacu forma Pfaff sa conduca la diferentiala totala exacta a unei functii Φ(x1, . . . , x3N+1) :
dΦ3N+1 = µ(x1, . . . , x3N+1) δΠ3N+1 (9.7)
se spunde despre forma diferentiala respectiva ca este integrabila , sau olonoma . Se stiedin matematica ca formele Pfaff de una si doua variabile admit ıntotdeauna un factor inte-grant, ın schimb forma Pfaff de trei variabile δΠ3 = X1dx1 + X2dx2 + X3dx3 este olonoma,numai daca este ındeplinita conditia X · rotX = 0 , unde X = X(X1, X2, X3) . Rezultatuleste un caz particular al teoremei lui Frobenius , care furnizeaza conditiile la care tre-buie sa satisfaca coeficientii unei forme diferentiale liniare, asa ıncat ea sa admita un factorintegrant.

9.1. LEGATURI SI DEPLASARI 233
Daca un sistem mecanic este supus numai la legaturi finite si legaturi diferentiale inte-grabile, el va fi numit sistem olonom (exemple : sistemul liber, sistemul cu legaturi finite,sistemul cu legaturi finite si legaturi diferentiale integrabile). Daca sistemul este supus si lalegaturi diferentiale neintegrabile, el va fi numit sistem neolonom .
Se stie ca legaturile pot fi nestationare sau stationare, dupa cum timpul figureaza saunu figureaza explicit ın ecuatia legaturii. In cazul unei legaturi finite (9.1), conditia ca ea
sa fie stationara se scrie :∂f
∂t= 0 , iar ın cazul unei legaturi diferentiale (9.6) conditiile de
stationaritate vor fi :∂Ai
∂t= 0 ; i = 1, . . . , N si At = 0 (nu este suficient ca
∂At
∂t= 0 !). Un
sistem material supus numai la legaturi stationare, poarta numele de sistem scleronom .Daca el este supus si la legaturi nestationare, el va fi numit sistem reonom .
Prezenta legaturilor aduce ın rezolvarea problemelor de mecanica doua dificultati majore.Prima dintre ele consta ın aceea ca nu toate coordonatele ri ; i = 1, . . . , N sunt independente,ıntrucat ele sunt legate prin intermediul unor relatii date. Pentru sisteme olonome, acesterelatii permit eliminarea din ecuatiile de miscare a coordonatelor dependente, asa ıncatdin punct de vedere formal, problema determinarii miscarii unui sistem olonom poate firezolvata ıntotdeauna folosind o metoda generala unica. Nu acelasi lucru se poate spunedespre sistemele neolonome, studiul miscarii acestora impunand ın majoritatea cazurilor otratare individuala. A doua dificultate ıntrodusa de prezenta legaturilor este legata de faptulca reactiile legaturilor sunt apriori necunoscute. Dupa cum se va vedea, dificultatea poate fiocolita printr-o reformulare adecvata a problemei, asa ıncat ın ea sa nu mai figureze explicitca necunoscute reactiile legaturilor, ci doar niste marimi legate de fortele efectiv aplicateasupra sistemului, forte care sunt presupuse ca fiind date.
In continuare sunt prezentate cateva exemple de sisteme cu legaturi.a. Doua particule unite printr-o bara de lungime constanta l si masa neglijabila. Sistemul
este olonom si scleronom, ecuatia legaturii fiind :
(x2 − x1)2 + (y2 − y1)
2 + (z2 − z1)2 − l2 = 0 (9.8)
Dupa cum se stie, solidul rigid poate fi privit ca un sistem de puncte materiale echidistanteunul fata de altul, deci supus la legaturi de tipul (9.8). Din acest punct de vedere, solidulrigid liber reprezinta un caz particular de sistem de puncte materiale olonom si scleronom.
b. Doua particule unite printr-o bara de lungime variabila l = f(t) si masa neglijabila.Sistemul este olonom si reonom, ecuatia legaturii fiind tot de forma (9.8) unde acum l = f(t) .
c. Doua particule avand aceeasi masa situate ın planul xOy , legate printr-o bara rigidade lungime l si masa neglijabila, care se pot deplasa fara frecare astfel ıncat viteza mijloculuibarei este tot timpul coliniara cu directia barei (modelul permite studiul miscarii unei patinepe un plan). Ecuatiile legaturilor sunt :
z1 = 0 , z2 = 0
(x2 − x1)2 + (y2 − y1)
2 − l2 = 0
x1 + x2
x2 − x1
=y1 + y2
y2 − y1
(9.9)
ultima ecuatie rezultand din conditia1
2(r1 + r2) = λ (r2 − r1) . Sistemul este neolonom.
deoarece ultima ecuatie descrie o legatura diferentiala neintegrabila.

234 CAPITOLUL 9. BAZELE MECANICII ANALITICE
d. Un disc plan omogen de raza R se rostogoleste fara alunecare pe un plan orizontal fix,astfel ıncat planul discului ramane tot timpul perpendicular pe planul fix (modelul permitestudiul miscarii rotii unui vehicul). Pozitia discului la un moment dat este determinata decoordonatele vectorului de pozitie rO ale centrului sau de masa (care constituie totodataoriginea sistemului de referinta solidar legat de rigid) ın raport cu sistemul de referinta fixxO , yO , zO = R , de unghiul ψ facut de planul discului cu planul vertical fix si de unghiul ϕcare masoara rotatia discului ın jurul propriei sale axe. Alegand axa Oz a sistemului solidarlegat de rigid perpendiculara pe planul discului si trecand prin centrul de masa, unghiul de
nutatie va fi evident θ =π
2. Deoarece discul se rostogoleste fara sa alunece pe planul orizontal
fix, viteza absoluta a punctului de contact P trebuie sa fie nula : vP = vO + ω × rP = 0 .Folosind formulele cinematice ale lui Euler pentru a calcula componentele vectorului rotatieω ın sistemul fix si tinand cont ca rP = rP (0, 0,−R), ecuatiile scalare ale legaturii sunt :
xO + R ϕ cos ψ = 0
yO + R ϕ sin ψ = 0
zO = 0 , zO = R
(9.10)
Primele doua ecuatii nu admit un factor integrant si nu pot fi integrate ınainte de a rezolvacomplet problema miscarii. In consecinta sistemul este neolonom, dar scleronom deoarecetimpul nu intervine explicit ın ecuatiile legaturilor.
Figura 9.1: Disc vertical care se rostogoleste fara sa alunece pe un plan orizontal
Sistemul devine olonom daca discul efectueaza o miscare de rototranslatie plana, ın cursulcareia planul discului ramane tot timpul paralel cu el insusi. In acesta situatie sistemul fixde axe se poate alege astfel ıncat unul din planele de referinta verticale sa coincida cu planul
discului (ψ = 0 sau ψ =π
2) si atunci factorul integrant este chiar unitatea.
Fara a face deocamdata referire la fortele aplicate asupra sistemului mecanic, examinamın continuare un caz mai general ın care unui sistem oarecare de puncte materiale ıi suntimpuse un numar n1 de legaturi geometrice independente fj(t, r) = 0 ; j = 1, . . . , n1 si unnumar n2 de legaturi cinematice independente din clasa considerata. Transcriind legaturile

9.1. LEGATURI SI DEPLASARI 235
geometrice sub forma echivalenta diferentiala, ecuatiile constrangerilor vor fi :
N∑
i=1
∂fj
∂ri
ri +∂fj
∂t= 0 ; j = 1, . . . , n1
N∑
i=1
Ali ri + Alt = 0 ; l = 1, . . . , n2
(9.11)
La momentul t si pentru o pozitie posibila a sistemului, viteza sistemului (r1, . . . , rN) vafi o viteza posibila, daca ea satisface la cele n1 + n2 ecuatii liniare (9.11). Astfel, oviteza posibila este cea compatibila cu legaturile impuse sistemului . Deoarecen1 + n2 < 3N , pentru orice pozitie posibila a sistemului la momentul t exista o infinitatede viteze posibile . In raport cu fortele efective aplicate sistemului, miscarea reala va fiefectuata cu una din aceste viteze posibile.
Ansamblul :dri = ridt ; i = 1, . . . , N (9.12)
cu (r1, . . . , rN) una din vitezele posibile ale sistemului, va reprezenta o deplasare posibila(infinitezimala) a sistemului la momentul t , dintr-o pozitie posibila. Ecuatiile care definescdeplasarile posibile vor fi :
N∑
i=1
∂fj
∂ri
dri +∂fj
∂tdt = 0 ; j = 1, . . . , n1
N∑
i=1
Ali dri + Alt dt = 0 ; l = 1, . . . , n2
(9.13)
Intucat exista o infinitate de viteze posibile, va exista si o infinitate de deplasari posibileale sistemului, compatibile cu legaturile.
Considerand doua deplasari posibile ale sistemului din aceeasi pozitie posibila si la acelasimoment de timp t :
dri = ridt
d′ri = r′idt; i = 1, . . . , N (9.14)
deoarece ambele ansambluri (dr1, . . . , drN) si (d′r1, . . . , d′rN) satisfac la ecuatiile (9.13),
rezulta ca diferentele :δri = d′ri − dri ; i = 1, . . . , N (9.15)
vor satisface la ecuatiile :
N∑
i=1
∂fj
∂ri
δri = 0 ; j = 1, . . . , n1
N∑
i=1
Ali δri = 0 ; l = 1, . . . , n2
(9.16)
Ansamblul (δr1, . . . , δrN) care satisface la ecuatiile (9.16) va constitui o deplasare virtualaa sistemului si este evident ca va exista o infinitate de deplasari virtuale , compatibilecu legaturile.
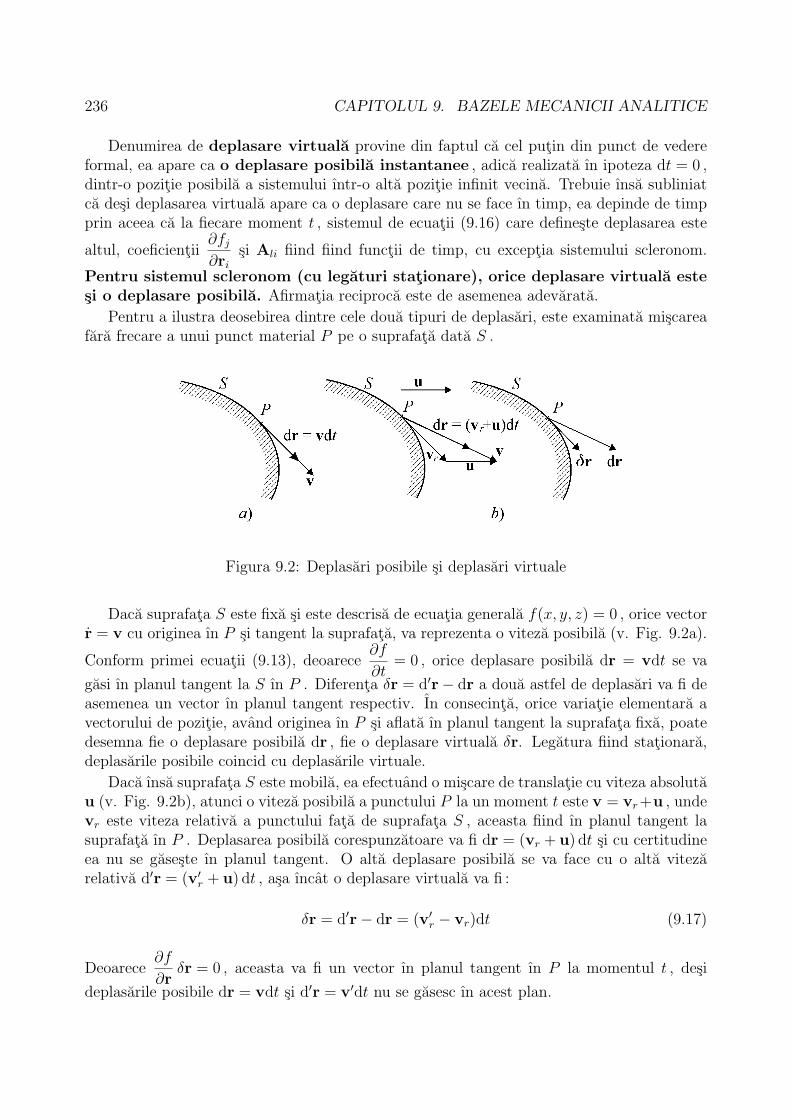
236 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Denumirea de deplasare virtuala provine din faptul ca cel putin din punct de vedereformal, ea apare ca o deplasare posibila instantanee , adica realizata ın ipoteza dt = 0 ,dintr-o pozitie posibila a sistemului ıntr-o alta pozitie infinit vecina. Trebuie ınsa subliniatca desi deplasarea virtuala apare ca o deplasare care nu se face ın timp, ea depinde de timpprin aceea ca la fiecare moment t , sistemul de ecuatii (9.16) care defineste deplasarea este
altul, coeficientii∂fj
∂ri
si Ali fiind fiind functii de timp, cu exceptia sistemului scleronom.
Pentru sistemul scleronom (cu legaturi stationare), orice deplasare virtuala estesi o deplasare posibila. Afirmatia reciproca este de asemenea adevarata.
Pentru a ilustra deosebirea dintre cele doua tipuri de deplasari, este examinata miscareafara frecare a unui punct material P pe o suprafata data S .
Figura 9.2: Deplasari posibile si deplasari virtuale
Daca suprafata S este fixa si este descrisa de ecuatia generala f(x, y, z) = 0 , orice vectorr = v cu originea ın P si tangent la suprafata, va reprezenta o viteza posibila (v. Fig. 9.2a).
Conform primei ecuatii (9.13), deoarece∂f
∂t= 0 , orice deplasare posibila dr = vdt se va
gasi ın planul tangent la S ın P . Diferenta δr = d′r− dr a doua astfel de deplasari va fi deasemenea un vector ın planul tangent respectiv. In consecinta, orice variatie elementara avectorului de pozitie, avand originea ın P si aflata ın planul tangent la suprafata fixa, poatedesemna fie o deplasare posibila dr , fie o deplasare virtuala δr. Legatura fiind stationara,deplasarile posibile coincid cu deplasarile virtuale.
Daca ınsa suprafata S este mobila, ea efectuand o miscare de translatie cu viteza absolutau (v. Fig. 9.2b), atunci o viteza posibila a punctului P la un moment t este v = vr +u , undevr este viteza relativa a punctului fata de suprafata S , aceasta fiind ın planul tangent lasuprafata ın P . Deplasarea posibila corespunzatoare va fi dr = (vr + u) dt si cu certitudineea nu se gaseste ın planul tangent. O alta deplasare posibila se va face cu o alta vitezarelativa d′r = (v′r + u) dt , asa ıncat o deplasare virtuala va fi :
δr = d′r− dr = (v′r − vr)dt (9.17)
Deoarece∂f
∂rδr = 0 , aceasta va fi un vector ın planul tangent ın P la momentul t , desi
deplasarile posibile dr = vdt si d′r = v′dt nu se gasesc ın acest plan.

9.2. DETERMINAREA MISCARII. AXIOMA LEGATURILOR IDEALE 237
9.2 Determinarea miscarii. Axioma legaturilor ideale
In ceea ce priveste problema determinarii miscarii unui sistem de puncte materialePi(mi, ri) ; i = 1, . . . , N ın absenta legaturilor, fiecare punct al sistemului se va deplasaconform ecuatiei :
miai = Fi ; i = 1, . . . , N (9.18)
unde Fi este rezultanta fortelor exterioare si interioare care actioneaza ın Pi . In prezenta
legaturilor, acceleratiile ai =1
mi
Fi ; i = 1, . . . , N pot fi incompatibile cu legaturile impuse,
deoarece este putin probabil ca ele sa satisfaca la ecuatiile obtinute prin derivarea relatiilor(9.11) :
N∑
i=1
∂fj
∂ri
· ai +N∑
i=1
d
dt
(∂fj
∂ri
)· vi +
d
dt
(∂fj
∂t
)= 0 ; j = 1, . . . , n1
N∑
i=1
Ali · ai +N∑
i=1
dAli
dt· vi +
dAlt
dt= 0 ; l = 1, . . . , n2
(9.19)
Acestea sunt constrangeri asupra acceleratiilor, impuse de legaturile sistemului. De aceea sepoate considera ca prezenta legaturilor se manifesta prin interventia unor forte suplimentareRi , apriori necunoscute, numite reactiile legaturilor , asa ıncat sub actiunea fortelor dateFi si a reactiilor legaturilor Ri , punctele sistemului sa se miste astfel, ıncat acceleratiiledeterminate din ecuatiile
miai = Fi + Ri ; i = 1, . . . , N (9.20)
sa fie compatibile cu legaturile (9.19). Se admite ca fortele Fi , numite forte efective , suntfunctii date de timp, pozitia si viteza sistemului : Fi(t, r1, . . . , rN , r1, . . . , rN) ; i = 1, . . . , N .
Problema fundamentala a dinamicii sistemelor cu legaturi consta ın urmatoarele :fiind date fortele efective Fi = Fi(t, r, r) ; i = 1, . . . , N , pozitia initiala r0
i si vitezainitiala v0
i a fiecarui punct i = 1, . . . , N a sistemului, compatibile cu legaturile, secere sa se determine miscarea sistemului si reactiile legaturilor .
Se observa ca numarul total de necunoscute ale problemei : ri(t) , Ri(t) ; i = 1, . . . , Neste 6N , iar numarul ecuatiilor avute la dispozitie (9.11) si (9.20) este 3N + n1 + n2 < 6N .Cat timp nu se face o ipoteza asupra naturii legaturilor, care sa furnizeze restul de
n = 6N − (3N + n1 + n2) = 3N − n1 − n2 (9.21)
ecuatii independente de care este nevoie, problema apare ca fiind nedeterminata. Acesteecuatii pot fi obtinute daca ne limitam la clasa legaturilor ideale , anume a legaturilorpentru care suma lucrurilor mecanice ale reactiilor legaturilor este nula, pentruorice deplasare virtuala a sistemului, compatibila cu legaturile :
N∑
i=1
Ri δri = 0 (9.22)
Mecanica analitica se limiteaza doar la studiul aceastei clase de legaturi, relatia (9.22) fiindcunoscuta si sub numele de axioma legaturilor ideale .
238 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Conditia (9.22) este suficienta pentru a furniza cele n ecuatii scalare de care mai avemnevoie pentru determinarea miscarii si a legaturilor. Intr-adevar, din sistemul (9.16) la caresatisfac deplasarile virtuale, pot fi determinate un numar de n1+n2 deplasari dependente deforma (. . . , δxi, δyi, δzi, . . .) ın functie de celelalte n = 3N−n1−n2 deplasari de aceeasi forma,notate cu (δq1, . . . , δqn) , care raman arbitrare . Introducand aceste expresii ın ecuatia (9.22)
si grupand termenii astfel ıncat aceasta sa se poata rescrie sub forma generalan∑
k=1
R ′kδqk = 0 ,
deoarece variatiile δqk ; k = 1, . . . , n sunt independente, va trebui ca toti coeficientii R ′k ; k =
1, . . . , n sa se anuleze simultan. Deoarece acesti n coeficienti contin obligator necunoscuteleproblemei, procedeul furnizeaza si restul de n ecuatii scalare de care mai era nevoie pentruca problema fundamentala a dinamicii sistemelor cu legaturi sa fie complet determinata.
Ca exemple de legaturi ideale amintim : miscarea fara frecare a unui punct materialpe o suprafata fixa, mobila, sau deformabila; miscarea fara frecare a unui punct material peo curba fixa, mobila, sau deformabila; rigidul liber; rigidul cu punct fix; rigidul cu axa fixa;miscarea rigidului fara frecare pe o suprafata fixa sau mobila. In toate cazurile specificate sepoate verifica usor conditia (9.22). In general conceptul de legatura ideala este aproape uni-versal aplicabil, cu exceptia situatiilor ın care interventia frecarii poate modifica substantialtabloul fizic al fenomenului studiat.
In cele ce urmeaza se va presupune ca toate legaturile impuse asupra unui sistem mecanicsunt ideale.
9.3 Ecuatia generala a dinamicii
Prin ınlocuirea ın axioma legaturilor ideale (9.22) a reactiilor legaturilor care rezulta dinecuatiile de miscare (9.20), se obtine o ecuatie independenta de reactiuni :
N∑
i=1
(Fi −miai) δri = 0 (9.23)
Ecuatia (9.23) poarta numele de ecuatia generala a dinamicii , sau ecuatiad’Alembert-Lagrange . Ea exprima faptul ca miscarea sistemului material se faceastfel, ıncat ın orice moment si pentru orice pozitie compatibila cu legaturile,este ındeplinita ecuatia (9.23), oricare ar fi deplasarea virtuala, compatibila culegaturile, a sistemului.
Deoarece vectorul −miai a fost interpretat ca forta de inertie, enuntul poate fi reformulatsi ın sensul ca miscarea sistemului material se face astfel, ıncat ın orice momentsi pentru orice pozitie compatibila cu legaturile, suma dintre lucrul mecanical fortelor active si cel al fortelor de inertie este nula, pentru orice deplasarevirtuala, compatibila cu legaturile, a sistemului .
Ecuatia d’Alembert-Lagrange (9.23) este nu numai necesara, ci si suficienta pentru de-terminarea miscarii, adica a celor 3N coordonate si a celor 3N componente ale reactiilorlegaturilor.
Forma concreta a ecuatiilor de miscare pentru sistemele cu legaturi, precum si expresiilereactiilor legaturilor, pot fi obtinute folosind metoda multiplicatorilor lui Lagrange .

9.3. ECUATIA GENERALA A DINAMICII 239
Observand ca deplasarile δri din ecuatia (9.23) nu sunt toate arbitrare, ele trebuind sasatisfaca la un numar de n1 + n2 ecuatii de forma :
N∑
i=1
∂fj
∂ri
δri = 0 ; j = 1, . . . , n1
N∑
i=1
Ali δri = 0 ; l = 1, . . . , n2
(9.24)
fiecare ecuatie din primul grup va fi ınmultita cu un multiplicator λj , ecuatiile rezultateurmand a fi ınsumate dupa toate valorile lui j , iar fiecare ecuatie din cel de al doilea grup vafi ınmultita cu un multiplicator µl , ecuatiile rezultate fiind apoi ınsumate dupa toate valorilelui l . Intervertind si ordinea sumarilor, vor rezulta expresiile :
N∑
i=1
n1∑
j=1
λj∂fj
∂ri
δri = 0 ,
N∑
i=1
( n2∑
l=1
µl Ali
)δri = 0 (9.25)
care adunate la ecuatia (9.23) conduc la identitatea :
N∑
i=1
−miai + Fi +
n1∑
j=1
λj∂fj
∂ri
+n2∑
l=1
µl Ali
δri = 0 (9.26)
Folosind ecuatiile (9.24) pot fi exprimate un numar de n1 + n2 deplasari dependente deforma (. . . , δxi, δyi, δzi . . .) ın functie de celelalte n = 3N−n1−n2 deplasari considerate inde-pendente si notate formal cu (δq1 . . . , δqn) . Impunand conditia ca cei n1 +n2 multiplicatoriλj si µl sa fie determinatii din cele n1 + n2 ecuatii care rezulta prin anularea coeficientilordeplasarilor dependente , ın suma (9.26) vor ramane n termeni avand forma unor produsedintre niste coeficienti si deplasarile independente . Pentru ca identitatea sa ramana sa-tisfacuta ın continuare, vor trebui sa se anuleze simultan cei n coeficienti ai deplasarilorindependente . In concluzie, multiplicatorii λj ; j = 1, . . . , n1 si µl ; l = 1, . . . , n2 pot fiıntotdeauna astfel alesi, ıncat coeficientii din suma (9.26) sa se anuleze simultan .Rezulta sistemul de N ecuatii vectoriale :
miai = Fi +n1∑
j=1
λj∂fj
∂ri
+n2∑
l=1
µl Ali ; i = 1, . . . , N (9.27)
Acestea reprezinta ecuatiile Lagrange de speta ıntai cu multiplicatori . In coordonatecarteziene, ecuatiile (9.27) sunt echivalente cu urmatorul sistem de 3N ecuatii scalare pentrudeterminarea miscarii sistemului material :
mixi = Fix +n1∑
j=1
λj∂fj
∂xi
+n2∑
l=1
µl (Ali)x
miyi = Fiy +n1∑
j=1
λj∂fj
∂yi
+n2∑
l=1
µl (Ali)y
mizi = Fiz +n1∑
j=1
λj∂fj
∂zi
+n2∑
l=1
µl (Ali)z
; i = 1, . . . , N (9.28)

240 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Ecuatiile Lagrange de speta ıntai, ımpreuna cu ecuatiile legaturilor
fj(t, r1, . . . , rN) = 0 ; j = 1, . . . , n1
N∑
i=1
Ali ri + Alt = 0 ; l = 1, . . . , n2
(9.29)
furnizeaza cele 3N +n1 +n2 ecuatii pentru determinarea necunoscutelor probemei : functiilexi, yi, zi ; i = 1, . . . , N si multiplicatorii Lagrange λj ; j = 1, . . . , n1 si µl ; l = 1, . . . , n2 .Reactiile legaturilor pot fi apoi determinate folosind direct ecuatiile de miscare (9.20) :
Ri =n1∑
j=1
λj∂fj
∂ri
+n2∑
l=1
µl Ali ; i = 1, . . . , N (9.30)
Desi metoda descrisa este destul de greoaie, ea are avantajul ca este aplicabila atat lasisteme olonome, cat si la cele neolonome. In cazul sistemelor olonome, dificultatea legata defaptul ca nu toate coordonatele sistemului sunt independente, poate fi evitata prin folosireacoordonatelor generalizate, pentru care ecuatiile legaturilor sunt automat satisfacute.
9.3.1 Principiul deplasarilor virtuale
Folosind ecuatia generala a dinamicii poate fi obtinuta usor expresia pentru conditia deechilibru a unui sistem material supus la legaturi . Reamintim ca sistemul materialPi(mi, ri) ; i = 1, . . . , N este ın echilibru ıntr-o pozitie oarecare (r0
1, . . . , r0N) , daca pentru
t ≥ t0 functiile ri(t) = r0i ; i = 1, . . . , N reprezinta tot o solutie a ecuatiilor de miscare.
Conform acestei definitii, facand ai = 0 ; i = 1, . . . , N ın ecuatia d’Alembert-Lagrange,rezulta ca ın pozitia de echilibru va trebui ca :
N∑
i=1
Fi δri = 0 (9.31)
In consecinta, sistemul material este ın echilibru ıntr-o pozitie compatibila culegaturile, daca si numai daca ın acea pozitie este satisfacuta ecuatia (9.31),oricare ar fi deplasarea virtuala compatibila cu legaturile a sistemului .
Deoarece ın general Fi = Fi(t, r1, . . . , rN , r1, . . . , rN) ; i = 1, . . . , N , ecuatia (9.31) esteadevarata pentru orice valoare a lui t , daca ın expresiile pentru fortele efective se facınlocuirile ri = r0
i , ri = 0 ; i = 1, . . . , N . Cu aceasta precizare, ecuatia (9.31) determinacare din pozitiile admise de legaturi corespunde pozitiei de echilibru a sistemului.
Daca legaturile sunt stationare, formularea ”compatibila cu legaturile” se traduce prinaceea ca pozitia sistemului satisface legaturile finite, legaturile diferentiale fiind automatsatisfacute deoarece ri = 0 ; i = 1, . . . , N . Daca legaturile sunt nestationare, atunci aceeasiformulare se traduce prin aceea ca legaturile sunt satisfacute pentru orice valoare a lui t ,daca ın ele se fac ınlocuirile ri = r0
i , ri = 0 ; i = 1, . . . , N . De remarcat ca ın aceastasituatie, deplasarea virtuala a sistemului poate sa depinda de timp.
Ecuatia (9.31) este cunoscuta si sub numele de principiul deplasarilor virtuale , sauprincipiul lucrului mecanic virtual . Acesta reprezinta principiul cel mai general al
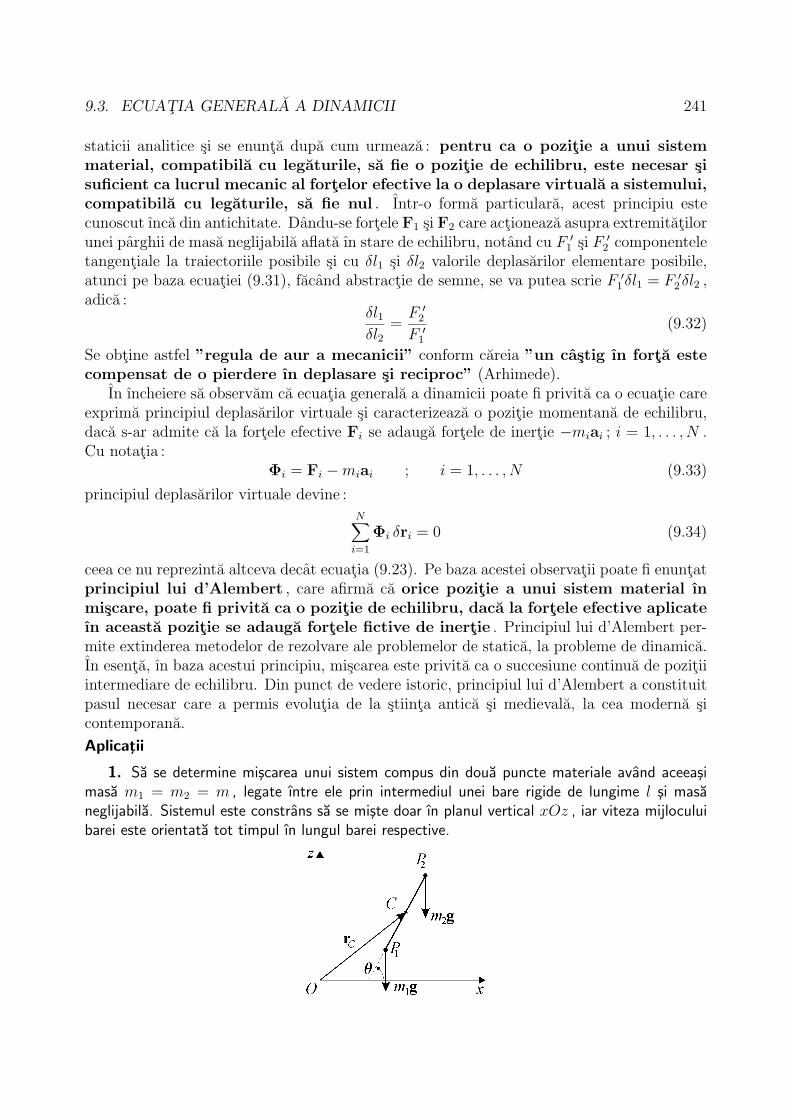
9.3. ECUATIA GENERALA A DINAMICII 241
staticii analitice si se enunta dupa cum urmeaza : pentru ca o pozitie a unui sistemmaterial, compatibila cu legaturile, sa fie o pozitie de echilibru, este necesar sisuficient ca lucrul mecanic al fortelor efective la o deplasare virtuala a sistemului,compatibila cu legaturile, sa fie nul . Intr-o forma particulara, acest principiu estecunoscut ınca din antichitate. Dandu-se fortele F1 si F2 care actioneaza asupra extremitatilorunei parghii de masa neglijabila aflata ın stare de echilibru, notand cu F ′
1 si F ′2 componentele
tangentiale la traiectoriile posibile si cu δl1 si δl2 valorile deplasarilor elementare posibile,atunci pe baza ecuatiei (9.31), facand abstractie de semne, se va putea scrie F ′
1 δl1 = F ′2 δl2 ,
adica :δl1δl2
=F ′
2
F ′1
(9.32)
Se obtine astfel ”regula de aur a mecanicii” conform careia ”un castig ın forta estecompensat de o pierdere ın deplasare si reciproc” (Arhimede).
In ıncheiere sa observam ca ecuatia generala a dinamicii poate fi privita ca o ecuatie careexprima principiul deplasarilor virtuale si caracterizeaza o pozitie momentana de echilibru,daca s-ar admite ca la fortele efective Fi se adauga fortele de inertie −miai ; i = 1, . . . , N .Cu notatia :
Φi = Fi −miai ; i = 1, . . . , N (9.33)
principiul deplasarilor virtuale devine :
N∑
i=1
Φi δri = 0 (9.34)
ceea ce nu reprezinta altceva decat ecuatia (9.23). Pe baza acestei observatii poate fi enuntatprincipiul lui d’Alembert , care afirma ca orice pozitie a unui sistem material ınmiscare, poate fi privita ca o pozitie de echilibru, daca la fortele efective aplicateın aceasta pozitie se adauga fortele fictive de inertie . Principiul lui d’Alembert per-mite extinderea metodelor de rezolvare ale problemelor de statica, la probleme de dinamica.In esenta, ın baza acestui principiu, miscarea este privita ca o succesiune continua de pozitiiintermediare de echilibru. Din punct de vedere istoric, principiul lui d’Alembert a constituitpasul necesar care a permis evolutia de la stiinta antica si medievala, la cea moderna sicontemporana.
Aplicatii
1. Sa se determine miscarea unui sistem compus din doua puncte materiale avand aceeasimasa m1 = m2 = m , legate ıntre ele prin intermediul unei bare rigide de lungime l si masaneglijabila. Sistemul este constrans sa se miste doar ın planul vertical xOz , iar viteza mijloculuibarei este orientata tot timpul ın lungul barei respective.

242 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Rezolvare : Conform enuntului, ecuatiile legaturilor impuse miscarii sistemului au expresiile :
(r2 − r1)2 = l2
1
2(r1 + r2) = λ (r2 − r1)
(1)
Tinand cont si de restrictiile y1 = 0 si y2 = 0 , pozitia sistemului la orice moment poate fiprecizata cu ajutorul a doua coordonate independente. Sistemul are doua grade de libertate. Desiaparent simpla, problema are o complexitate deosebita datorita prezentei legaturii neintegrabile,motiv pentru care pentru determinarea miscarii este preferata utilizarea metodei multiplicatorilorLagrange.
Folosind coordonatele carteziene, ecuatiile (1) devin :
(x2 − x1)2 + (z2 − z1)
2 − l2 = 0
(z2 − z1) (x1 + x2)− (x2 − x1) (z1 + z2) = 0(2)
Ecuatia d’Alembert-Lagrange2∑
i=1
mi (g − ri) δri = 0 va avea forma concreta :
x1δx1 + (g + z1) δz1 + x2δx2 + (g + z2) δz2 = 0 (3)
iar ecuatiile la care satisfac deplasarile virtuale vor fi :
(x2 − x1) δx1 + (z2 − z1) δz1 − (x2 − x1) δx2 − (z2 − z1) δz2 = 0
(z2 − z1) δx1 − (x2 − x1) δz1 + (z2 − z1) δx2 − (x2 − x1) δz2 = 0(4)
Inmultind ecuatia (4a) cu multiplicatorul λ, ecuatia (4b) cu multiplicatorul µ si adunand rezulta-tele la ecuatia (3), rezulta ecuatiile Lagrange de speta ıntai (cu multiplicatori) :
x1 = −λ (x2 − x1)− µ (z2 − z1)
z1 = − g − λ (z2 − z1) + µ (x2 − x1)
x2 = λ (x2 − x1)− µ (z2 − z1)
z2 = − g + λ (z2 − z1) + µ (x2 − x1)
(5)
Aceste ecuatii, ımpreuna cu ecuatiile (2) ale legaturilor, sunt suficiente pentru determinareanecunoscutelor x1, z1, x2, z2, λ, µ . Trecand la functiile :
rc =1
2(r1 + r2) , r = r2 − r1 (6)
ecuatiile (5) devin :xc = −µ z
zc = − g + µx,
x = 2 λx
z = 2 λ z(7)
iar ecuatiile legaturilor capata forma :
x2 + z2 − l2 = 0
z xc − x zc = 0(8)

9.3. ECUATIA GENERALA A DINAMICII 243
Eliminand parametrul λ din al doilea grup de ecuatii (7) rezulta :
z x− x z = 0 (9)
Trecand la niste coordonate polare ın planul xOz :
x = r cos θ
z = r sin θ(10)
din ecuatia (8a) rezulta ca r = l , iar ecuatia (9) se reduce la :
θ = 0 (11)
care prin integrare conduce la solutia :
θ(t) = α t + β (12)
Se observa ca functia θ(t) descrie variatia ın timp a unghiului facut de segmentul P1P2 cu axaOx . Inlocuind (12) ın (10) rezulta :
x = x2 − x1 = l cos(α t + β)
z = z2 − z1 = l sin(α t + β)(13)
Primul grup de ecuatii (7) din care se elimina parametrul µ,
x xc + z zc + g z = 0 (14)
precum si ecuatia (8b), pot fi satisfacute simultan numai daca :
xc =f(t)
lx , zc =
f(t)
lz (15)
Inlocuind ın (14) rezulta ecuatia pentru functia f(t) :
f +g
lz = 0 (16)
Tinand cont de (13b) rezulta solutia :
f(t) =g
αcos(α t + β) + γ (17)
Ecuatiile (15) devin :
xc =(
g
αcos θ + γ
)cos θ , zc =
(g
αcos θ + γ
)sin θ (18)
si au solutiile :
xc =1
2(x1 + x2) =
γ
αsin θ +
g
2α2θ +
g
4α2sin 2θ + δ
zc =1
2(z1 + z2) = − γ
αcos θ − g
2α2cos2 θ + ε
(19)

244 CAPITOLUL 9. BAZELE MECANICII ANALITICE
unde s-a utilizat formula∫
cos2 θ dθ =θ
2+
sin 2θ
4+ C .
Rezolvand sistemele (19) si (13) ın raport cu x1, z1, x2, z2, vor rezulta ecuatiile de miscarecautate :
x1(t) =γ
αsin θ +
g
2α2θ +
g
4α2sin 2θ − l
2cos θ + δ
z1(t) = − γ
αcos θ − g
2α2cos2 θ − l
2sin θ + ε
x2(t) =γ
αsin θ +
g
2α2θ +
g
4α2sin 2θ +
l
2cos θ + δ
z2(t) = − γ
αcos θ − g
2α2cos2 θ +
l
2sin θ + ε
(20)
unde functia θ(t) este data de ecuatia (12), iar constantele α, β, γ, δ, ε se determina din conditiileinitiale.
Multiplicatorii Lagrange λ si µ se determina din ecuatiile (7) :
λ =1
2l2(x x + z z) = − α2
2
µ =g
l2x +
1
l2(x zc − z xc) =
g
lcos(α t + β) +
αγ
l
(21)
2. Doua corpuri avand masele m1 si m2 pot aluneca fara frecare pe un plan ınclinat fix dublu,fiind legate printr-un fir inextensibil de lungime l si masa neglijabila, trecut peste un scripete fix Oa carui masa de asemenea se neglijeaza. Cunoscand unghiurile α1 si α2 facute de laturile planuluiınclinat cu orizontala, sa se determine acceleratia sistemului.
Rezolvare : Alegand sistemul de referinta ca ın figura, se observa ca legaturile finite inde-pendente au ecuatiile :
x1
sin α1
+x2
sin α2
= l
tg α1 = − x1
y1
, tg α2 =x2
y2
(1)
Ecuatia d’Alembert-Lagrange2∑
i=1
mi(g − ri) δri = 0 va avea forma concreta :
m1(g − x1) δx1 −m1y1δy1 + m2(g − x2) δx2 −m2y2δy2 = 0 (2)

9.3. ECUATIA GENERALA A DINAMICII 245
iar ecuatiile la care satisfac deplasarile virtuale vor fi :
δx1
sin α1
+δx2
sin α2
= 0
δx1 + tg α1 δy1 = 0 , δx2 − tg α2 δy2 = 0(3)
Utilizand (1b) si (3b) rezulta relatiile :
y1 = − 1
tg α1
x1 , δy1 = − 1
tg α1
δx1
y2 =1
tg α2
x2 , δy2 =1
tg α2
δx2
(4)
care ınlocuite ın ecuatia (2) conduc la expresia :
m1
(g − x1
sin2 α1
)δx1 + m2
(g − x2
sin2 α2
)δx2 = 0 (5)
Pe de alta parte din (1a) si (3a) rezulta :
x2 = − sin α2
sin α1
x1 , δx2 = − sin α2
sin α1
δx1 (6)
asa ca ecuatia (5) devine :
[(m1 sin α1 −m2 sin α2) g sin α1 − (m1 + m2) x1] δx1 = 0 (7)
Pentru ca ecuatia (7) sa fie satisfacuta pentru orice delasare δx1 , va trebui sa se anuleze coefi-cientul corespunzator :
x1 =m1 sin α1 −m2 sin α2
m1 + m2
g sin α1 (8)
Acceleratia sistemului va fi data de expresia 1 :
a =√
x21 + y2
1 =x1
sin α1
=m1 sin α1 −m2 sin α2
m1 + m2
g (9)
3. Peste un scripete fix omogen de raza R si masa M este trecut un fir inextensibil avandlungimea l , de capetele caruia sunt suspendate masele m1 si m2 . Sa se calculeze acceleratiasistemului daca m1 > m2 . Se neglijeaza masa firului, iar acesta nu poate aluneca pe scripete.
1 Acelasi rezultat putea fi obtinut mult mai rapid daca drept coordonate sunt alese distantele r1 si r2 de laorigine la cele doua corpuri. Restrictia care exprima faptul ca corpurile sunt legate printr-un fir inextensibil vaavea expresia :
r1 + r2 = l
Ecuatia d’Alembert-Lagrange devine2∑
i=1
mi(g − ri) δri =2∑
i=1
mi(g sin αi − ri) δri = 0 . Facand aici ınlocuirile
r2 = − r1 si δr2 = − δr1 se obtine :
[(m1 sin α1 −m2 sin α2) g − (m1 + m2) r1] δr1 = 0
de unde rezulta :
a = r1 =m1 sin α1 −m2 sin α2
m1 + m2g
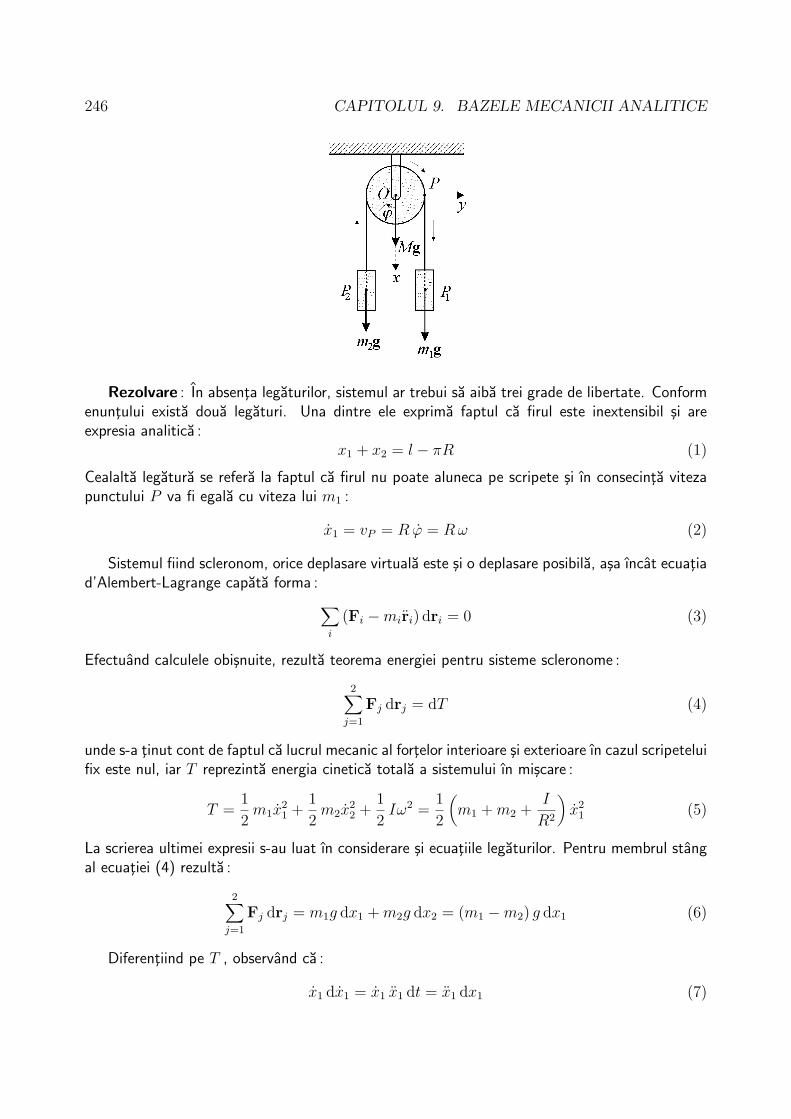
246 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Rezolvare : In absenta legaturilor, sistemul ar trebui sa aiba trei grade de libertate. Conformenuntului exista doua legaturi. Una dintre ele exprima faptul ca firul este inextensibil si areexpresia analitica :
x1 + x2 = l − πR (1)
Cealalta legatura se refera la faptul ca firul nu poate aluneca pe scripete si ın consecinta vitezapunctului P va fi egala cu viteza lui m1 :
x1 = vP = R ϕ = R ω (2)
Sistemul fiind scleronom, orice deplasare virtuala este si o deplasare posibila, asa ıncat ecuatiad’Alembert-Lagrange capata forma :
∑
i
(Fi −miri) dri = 0 (3)
Efectuand calculele obisnuite, rezulta teorema energiei pentru sisteme scleronome :
2∑
j=1
Fj drj = dT (4)
unde s-a tinut cont de faptul ca lucrul mecanic al fortelor interioare si exterioare ın cazul scripeteluifix este nul, iar T reprezinta energia cinetica totala a sistemului ın miscare :
T =1
2m1x
21 +
1
2m2x
22 +
1
2Iω2 =
1
2
(m1 + m2 +
I
R2
)x2
1 (5)
La scrierea ultimei expresii s-au luat ın considerare si ecuatiile legaturilor. Pentru membrul stangal ecuatiei (4) rezulta :
2∑
j=1
Fj drj = m1g dx1 + m2g dx2 = (m1 −m2) g dx1 (6)
Diferentiind pe T , observand ca :
x1 dx1 = x1 x1 dt = x1 dx1 (7)

9.3. ECUATIA GENERALA A DINAMICII 247
si egaland rezultatul cu (6) rezulta :[(m1 −m2) g −
(m1 + m2 +
I
R2
)x1
]dx1 = 0 (8)
Acceleratia sistemului 2 va fi astfel :
a = x1 =m1 −m2
m1 + m2 +I
R2
g =m1 −m2
m1 + m2 +1
2M
g (9)
unde s-a tinut cont de faptul ca momentul de inertie al unui disc omogen ın raport cu o axa care
trece prin centrul sau este I =1
2MR2 .
4. Un disc omogen de masa M este legat de un fir care trece peste un scripete O de masaneglijabila si se poate rostogoli fara sa alunece pe un plan ınclinat de unghi α . De celalalt capat alfirului este legata o masa m care se poate misca vertical. Sa se determine acceleratia sistemului.
2 Rezultatul poate fi obtinut pornind direct de la ecuatia d’Alembert-Lagrange∑
i
(Fi −miri) δri = 0 , care
ın cazul problemei devine :2∑
j=1
mj (g − xj) δxj =∑
disc
mkrk δrk
Tinant cont de faptul ca x2 = − x1 si δx2 = − δx1 pentru membrul stang rezulta expresia :
2∑
j=1
mj (g − xj) δxj = [(m1 −m2) g − (m1 + m2) x1] δx1
Membrul drept poate fi calculat (v. sect. urmatoare) observand ca pozitia scripetelui poate fi precizata univocfolosind un singur parametru, anume unghiul de rotatie proprie ϕ :
∑
disc
mkrk δrk =[
ddt
(∂Td
∂ϕ
)− ∂Td
∂ϕ
]δϕ = Iϕ δϕ =
I
R2x1δx1
unde Td =12
Iω2 =12
Iϕ2 , ϕ =1R
x1 si δϕ =1R
δx1 . Egaland rezultatele se obtine :
[(m1 −m2) g −
(m1 + m2 +
I
R2
)x1
]δx1 = 0
deci :
a = x1 =m1 −m2
m1 + m2 +I
R2
g =m1 −m2
m1 + m2 +12
Mg

248 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Rezolvare : Alegand sistemul de referinta ca ın figura, se observa ca legaturile finite auexpresiile : √
x2c + y2
c + x = l , tg α = − xc
yc
(1)
iar legaturile cinematice scalare provin din conditia vectoriala vP = vC + ω × rP = 0 :
xc + R ω sin α = 0
yc −R ω cos α = 0(2)
In consecinta sistemul are un singur grad de libertate. Legaturile fiind stationare, ecuatiad’Alembert-Lagrange capata forma teoremei energiei pentru sisteme scleronome :
∑
i
Fi dri = dT (3)
unde ın cazul problemei considerate :
∑
i
Fi dri = Mg dxc + mg dx (4)
si
T =1
2M
(x2
c + y2c
)+
1
2Iω2 +
1
2mx2 (5)
Folosind ecuatia (1b) rezulta :
x2c + y2
c =x2
c
sin2 α(6)
iar din ecuatia (1a) se obtine :
xc
sin α+ x = l ;
xc
sin α+ x = 0 ,
dxc
sin α+ dx = 0 (7)
deci : ∑
i
Fi dri = (m−M sin α) g dx (8)
Pe de alta parte, din ecuatiile (2), (1a) si (7) rezulta :
R2ω2 = x2c + y2
c =x2
c
sin2 α= x2 (9)
Cu aceste rezultate, energia cinetica totala capata expresia :
T =1
2
(m + M +
I
R2
)x2 (10)
ceea ce era si de asteptat. Prin diferentiere se va putea scrie :
dT =(m + M +
I
R2
)x dx =
(m + M +
I
R2
)x dx (11)

9.3. ECUATIA GENERALA A DINAMICII 249
Egaland (8) cu (11), rezulta ın final expresia pentru acceleratia sistemului :
a = x =m−M sin α
m + M +I
R2
g =m−M sin α
m +3
2M
g (12)
unde s-a tinut cont de faptul ca momentul de inertie al unui disc omogen ın raport cu o axa care
trece prin centrul sau este I =1
2MR2 .
5. Un punct material P de masa m este constrans sa se gaseasca tot timpul pe suprafataunei sfere perfect lucioase de raza R. Sa se determine pozitiile de echilibru ale punctului pe sfera,daca el este atras de un alt punct P1 de pe sfera cu o forta proportionala cu distanta.
Rezolvare : Rezultanta fortelor care actioneaza asupra punctului P are expresia :
F = mg + λ (r1 − r) (1)
iar ecuatia legaturii este :
x2 + y2 + z2 = R2 (2)
Conform principiului deplasarilor virtuale, la echilibru va trebui ca :
F · δr = Fx δx + Fy δy + Fz δz = 0 (3)
ceea ce exprima faptul ca ın pozitia de echilibru, rezultanta F trebuie sa fie normala la sfera.Este de asteptat ca pozitiile de echilibru sa se situeze pe cercul mare care rezulta din intersectiasferei cu un plan vertical care trece prin axa Oz si punctul P1 .
Sistemul are doua grade de libertate. Tinand cont de (1), ecuatia (3) capata forma :
(x1 − x) δx + (y1 − y) δy +[(
z1 − mg
λ
)− z
]δz = 0 (4)
Din ecuatia x δx + y δy + z δz = 0 la care satisfac deplasarile virtuale va rezulta :
δz = − 1
z(x δx + y δy) = − 1√
R2 − (x2 + y2)(x δx + y δy) (5)
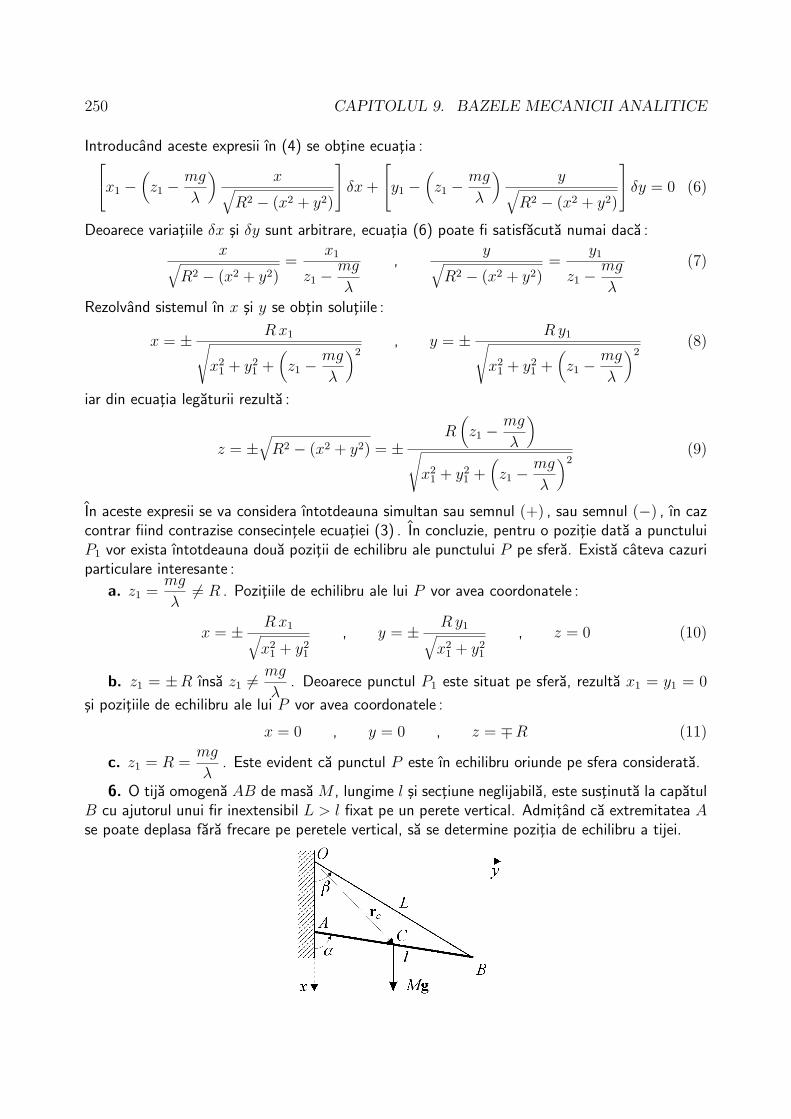
250 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Introducand aceste expresii ın (4) se obtine ecuatia :x1 −
(z1 − mg
λ
)x√
R2 − (x2 + y2)
δx +
y1 −
(z1 − mg
λ
)y√
R2 − (x2 + y2)
δy = 0 (6)
Deoarece variatiile δx si δy sunt arbitrare, ecuatia (6) poate fi satisfacuta numai daca :x√
R2 − (x2 + y2)=
x1
z1 − mg
λ
,y√
R2 − (x2 + y2)=
y1
z1 − mg
λ
(7)
Rezolvand sistemul ın x si y se obtin solutiile :
x = ± R x1√x2
1 + y21 +
(z1 − mg
λ
)2, y = ± R y1√
x21 + y2
1 +(z1 − mg
λ
)2(8)
iar din ecuatia legaturii rezulta :
z = ±√
R2 − (x2 + y2) = ±R
(z1 − mg
λ
)
√x2
1 + y21 +
(z1 − mg
λ
)2(9)
In aceste expresii se va considera ıntotdeauna simultan sau semnul (+) , sau semnul (−) , ın cazcontrar fiind contrazise consecintele ecuatiei (3) . In concluzie, pentru o pozitie data a punctuluiP1 vor exista ıntotdeauna doua pozitii de echilibru ale punctului P pe sfera. Exista cateva cazuriparticulare interesante :
a. z1 =mg
λ6= R . Pozitiile de echilibru ale lui P vor avea coordonatele :
x = ± R x1√x2
1 + y21
, y = ± R y1√x2
1 + y21
, z = 0 (10)
b. z1 = ±R ınsa z1 6= mg
λ. Deoarece punctul P1 este situat pe sfera, rezulta x1 = y1 = 0
si pozitiile de echilibru ale lui P vor avea coordonatele :
x = 0 , y = 0 , z = ∓R (11)
c. z1 = R =mg
λ. Este evident ca punctul P este ın echilibru oriunde pe sfera considerata.
6. O tija omogena AB de masa M , lungime l si sectiune neglijabila, este sustinuta la capatulB cu ajutorul unui fir inextensibil L > l fixat pe un perete vertical. Admitand ca extremitatea Ase poate deplasa fara frecare pe peretele vertical, sa se determine pozitia de echilibru a tijei.

9.3. ECUATIA GENERALA A DINAMICII 251
Rezolvare : Ecuatia legaturii :rc = rB −CB (1)
proiectata pe sistemul de axe considerat, conduce la ecuatiile scalare :
xc = L cos β − l
2cos α
yc = L sin β − l
2sin α
(2)
Observand ca yc =l
2sin α , ecuatia (2b) mai poate fi scrisa sub forma :
L sin β − l sin α = 0 (3)
Avand ın vedere ecuatiile (2a) si (3), rezulta ca sistemul are un singur grad de libertate.Tinand cont ca unicele forte care actioneaza asupra sistemului sunt greutatile punctelor care
alcatuiesc tija, principiul deplasarilor virtuale capata forma simpla :
∑
i
Fi δri =∑
i
mig δxi = Mg δxc = 0 (4)
ceea ce reprezinta principiul lui Torricelli :
δxc = 0 (5)
Deoarece din (3) rezulta :
sin β =l
Lsin α , cos β =
1
L
√L2 − l2 sin2 α (6)
ecuatia (2a) devine :
xc =√
L2 − l2 sin2 α− l
2cos α (7)
Conditia necesara si suficienta de echilibru devine astfel :
δxc =l
2sin α
1− 2l cos α√
L2 − l2 sin2 α
δα = 0 (8)
de unde rezulta valorile posibile ale unghiului α pentru care tija este ın echilibru :
α = 0 , α = arcsin
1
l
√4l2 − L2
3
(9)
7. Un lantisor avand masa M si lungimea l , are fixate la capete doua mase m1 si m2 .Sistemul se poate misca fara frecare pe o sfera avand raxa R . Cunoscand ca l < πR , sa sedetermine pozitia de echilibru a sistemului.

252 CAPITOLUL 9. BAZELE MECANICII ANALITICE
Rezolvare : Sistemul are un singur grad de libertate. Deoarece fortele date sunt reprezentatede greutatile punctelor P1 si P2 si de greutatea lantisorului, principiul deplasarilor virtuale :
F1 δr1 + F2 δr2 +∑
j
Fj δrj = 0 (1)
capata forma simpla :m1g δy1 + m2g δy2 + Mg δyc = 0 (2)
unde yc reprezinta ordonata centrului de masa a lantisorului. In tot cursul miscarii va trebui safie ındeplinita conditia :
θ2 − θ1 =l
R(3)
Utilizand coordonatele polare, se va putea scrie :
y1 = R sin θ1 , y2 = R sin θ2 = R sin
(θ1 +
l
R
)
yc =1
M
θ2∫
θ1
y dm =R2
l
θ1+lR∫
θ1
sin θ dθ =R2
l
[cos θ1 − cos
(θ1 +
l
R
)] (4)
Deplasarile virtuale corespunzatoare vor avea expresiile :
δy1 = R cos θ1 δθ1
δy2 = R cos
(θ1 +
l
R
)δθ1 = R
(cos θ1 cos
l
R− sin θ1 sin
l
R
)δθ1
δyc =R2
l
[sin
(θ1 +
l
R
)− sin θ1
]δθ1 =
R2
l
(sin θ1 cos
l
R+ cos θ1 sin
l
R− sinθ1
)δθ1
(5)
Introducand aceste expresii ın ecuatia (2) rezulta :(
m1 + m2 cosl
R+
MR
lsin
l
R
)cos θ1 −
[m2 sin
l
R+
MR
l
(1− cos
l
R
)]sin θ1
δθ1 = 0
(6)Pozitia de echilibru a sistemului va fi data de expresia :
tg θ1 =m1 + m2 cos
l
R+
MR
lsin
l
R
m2 sinl
R+
MR
l
(1− cos
l
R
) (7)

Capitolul 10
Sisteme olonome
10.1 Coordonate generalizate. Spatiul configuratiilor
Admitem ca sistemul de puncte materiale Pi(mi, ri) ; i = 1, . . . , N este supus numai lalegaturi finite si la legaturi diferentiale integrabile. Determinand pentru fiecare din acesteadin urma factorul integrant corespunzator si aducandu-le la forma finita prin integrare,sistemului ıi sunt impuse numai legaturi avand forma generala :
fj(t, r1, . . . , rN) = 0 ; j = 1, . . . , n1 (10.1)
Presupunand ca aceste legaturi sunt independente, ın baza teoremei functiilor implicite, potfi eliminate un numar de n1 coordonate din numarul total de 3N , rezultand pe aceasta caledoar n = 3N − n1 coordonate independente , numarul acestora fiind egal cu numarulgradelor de libertate ale sistemului .
Eliminarea coordonatelor dependente poate fi realizata si ın alt mod, presupunand ca potfi introduse un numar de n = 3N−n1 variabile independente, notate formal prin (q1, . . . , qn) ,asa ıncat coordonatele (r1, . . . , rN) sa poata fi exprimate prin intermediul acestor variabile :
ri = ri(t, q1, . . . , qn) ; i = 1, . . . , N (10.2)
Setul de n variabile independente, al caror numar coincide cu numarul gradelor de libertate,este ales astfel ıncat prin introducerea functiilor (10.2) ın (10.1), legaturile sa fie satisfacuteautomat, sistemul de ecuatii (10.1) reducandu-se la niste identitati. De exemplu, ın cazulunei particule care se poate misca fara frecare pe o sfera mobila de raza R , ecuatia legaturiieste :
(x− vxt)2 + (y − vyt)
2 + (z − vzt)2 −R2 = 0 (10.3)
Deoarece numarul gradelor de libertate este n = 2 , ın calitate de variabile independente, ınsistemul de referinta legat solidar de sfera, pot fi alese coordonatele q1 ≡ θ (unghiul formatde vectorul de pozitie al punctului cu axa Oz) si q2 ≡ ϕ (unghiul dintre proiectia vectoruluide pozitie ın planul xOy si axa Ox). Ecuatiile (10.2) vor avea forma explicita :
x = vxt + R sin θ cos ϕ
y = vyt + R sin θ sin ϕ
z = vzt + R cos θ
(10.4)
253

254 CAPITOLUL 10. SISTEME OLONOME
Introducand aceste expresii ın ecuatia legaturii (10.3), aceasta din urma se reduce la oidentitate. Din acest punct de vedere, ecuatiile (10.2) pot fi privite ca niste ecuatii detransformare de la variabilele (r1, . . . , rN) la variabilele (q1, . . . , qn) .
Figura 10.1: Spatiul fizic si spatiul configuratiilor
Coordonatele qk ; k = 1, . . . , n sunt numite coordonate Lagrange , sau coordonategeneralizate ale sistemului olonom. Multimea valorilor pe care aceste coordonate le potparcurge vor defini un spatiu n-dimensional, numit spatiul configuratiilor , sau spatiullui Lagrange Λn . La un moment dat, unei pozitii (r1, . . . , rN) a sistemului ın spatiulfizic, compatibila cu legaturile, ıi va corespunde ın spatiul configuratiilor un punct figura-tiv avand coordonatele (q1, . . . , qn) si invers. Atunci cand timpul variaza continuu ıntr-uninterval finit t1 ≤ t ≤ t2 , ansamblului de traiectorii descrise de punctele sistemului ınspatiul fizic corespunzatoare evolutiei acestuia ıntre doua stari (1) si (2) , ıi va corespunde ınspatiul configuratiilor Λn o traiectorie care trece prin punctele figurative avand coordonatele(q
(1)1 , . . . , q(1)
n ) si (q(2)1 , . . . , q(2)
n ) (v. Fig. 10.1). Miscarea sistemului ın spatiul lui Lagrange vafi descrisa de ecuatiile :
qk = qk(t) ; k = 1, . . . , n (10.5)
care reprezinta ecuatiile parametrice ale traiectoriei punctului figurativ ın spatiulconfiguratiilor Λn .
Corespondenta (10.2) poate fi extinsa la toate elementele miscarii. Unei deplasari posibiledri = ridt ; i = 1, . . . , N a sistemului ın spatiul fizic, ıi va corespunde o deplasare posibiladqk = qkdt ; k = 1, . . . , n ın spatiul Λn , cele doua deplasari fiind legate de relatiile :
dri =n∑
k=1
∂ri
∂qk
dqk +∂ri
∂tdt ; i = 1, . . . , N (10.6)
In cazul deplasarilor virtuale, relatiile dintre acestea vor fi :
δri =n∑
k=1
∂ri
∂qk
δqk ; i = 1, . . . , N (10.7)
Din (10.6) rezulta ca vitezele vi = ri ; i = 1, . . . , N ın spatiul fizic, sunt liniar dependente devitezele qk ; k = 1, . . . , n din Λn :
ri =n∑
k=1
∂ri
∂qk
qk +∂ri
∂t; i = 1, . . . , N (10.8)

10.2. ECUATIILE LAGRANGE PENTRU SISTEME OLONOME 255
Lucrul mecanic elementar al fortelor efective la o deplasare virtuala a sistemului, va fidat de expresia :
δL =N∑
i=1
Fi δri =N∑
i=1
Fi ·n∑
k=1
∂ri
∂qk
δqk =n∑
k=1
(N∑
i=1
Fi∂ri
∂qk
)δqk =
n∑
k=1
Qk δqk (10.9)
unde s-a facut notatia :
Qk =N∑
i=1
Fi∂ri
∂qk
; k = 1, . . . , n (10.10)
Marimile Qk = Qk(t, q, q) ; k = 1, . . . , n vor reprezenta coordonatele fortei generalizate .Trebuie observat ca coordonatele generalizate nu au neaparat dimensiunea unei lungimi,asa ıncat nici coordonatele fortei generalizate nu vor avea obligator dimensiunea de forta,ınsa produsele de forma Qk δqk vor avea ıntotdeauna dimensiunea unui lucru mecanic. Deexemplu, daca qk este o coordonata unghiulara care descrie rotatia ın jurul unei axe, Qk vareprezenta momentul unei forte ın raport cu axa respectiva.
In ıncheierea acestor consideratii sa observam ca ın spatiul configuratiilor Λn , principiullucrului mecanic virtual afirma ca ın pozitia de echilibru a sistemului, va trebui ca :
n∑
k=1
Qk δqk = 0 (10.11)
oricare ar fi deplasarea virtuala compatibila cu legaturile. Deoarece ıntr-o pozitie oarecare,deplasarea virtuala a sistemului satisface legaturile pentru o alegere arbitrara a variatiilorδqk ; k = 1, . . . , n , pozitia de echilibru a sistemului ın Λn va fi definita de ecuatiile :
Qk(t, q) = 0 ; k = 1, . . . , n (10.12)
In consecinta pozitia unui sistem olonom este o pozitie de echilibru, daca si numaidaca, ın pozitia respectiva toate coordonatele fortei generalizate sunt nule .
10.2 Ecuatiile Lagrange pentru sisteme olonome
Pentru a deduce ecuatiile de miscare ale unui sistem olonom ın spatiul configuratiilor Λn ,se porneste de la ecuatia generala a dinamicii :
N∑
i=1
(Fi −miai) δri = 0 (10.13)
Avand ın vedere observatia anterioara caN∑
i=1
Fi δri =n∑
k=1
Qk δqk , pentru cea de a doua suma
din (10.13) va putea fi scrisa relatia :
N∑
i=1
miai δri =n∑
k=1
Zk δqk (10.14)

256 CAPITOLUL 10. SISTEME OLONOME
unde, prin analogie cu (10.10), ın membrul drept urmeaza sa fie evaluate expresiile :
Zk =N∑
i=1
miri∂ri
∂qk
=N∑
i=1
midri
dt
∂ri
∂qk
=d
dt
(N∑
i=1
miri∂ri
∂qk
)−
N∑
i=1
mirid
dt
(∂ri
∂qk
); k = 1, . . . , n
(10.15)Tinand cont de relatiile liniare (10.8), se poate scrie direct :
∂ri
∂qk
=∂ri
∂qk
;i = 1, . . . , N
k = 1, . . . , n(10.16)
Pe de alta parte, utilizand aceleasi relatii, rezulta :
∂ri
∂qk
=n∑
j=1
∂2ri
∂qj∂qk
qj +∂2ri
∂t∂qk
=d
dt
(∂ri
∂qk
);
i = 1, . . . , N
k = 1, . . . , n(10.17)
Folosind aceste proprietati, expresia (10.15) devine :
Zk =d
dt
(N∑
i=1
miri∂ri
∂qk
)−
N∑
i=1
miri∂ri
∂qk
=d
dt
(∂T
∂qk
)− ∂T
∂qk
; k = 1, . . . , n (10.18)
deoarece ınlocuind (10.8) ın definitia T =1
2
N∑
i=1
mir2i , va rezulta formal ca T = T (t, q, q) .
Inlocuind toate aceste rezultate ın (10.13), ecuatia generala a dinamicii ın spatiul Λn
devine :n∑
k=1
[d
dt
(∂T
∂qk
)− ∂T
∂qk
]−Qk
δqk = 0 (10.19)
Deoarece deplasarile δqk ; k = 1, . . . , n sunt arbitrare, egalitatea este satisfacuta doardaca toti coeficientii variatiilor respective se anuleaza simultan. In concluzie, ın spatiulconfiguratiilor Λn ecuatia generala a dinamicii este echivalenta cu sistemul de ecuatii :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= Qk ; k = 1, . . . , n (10.20)
Acestea sunt ecuatiile de miscare ale sistemului olonom ın Λn , ele fiind numite si ecuatiileLagrange de speta a II-a . Marimile qk ; k = 1, . . . , n sunt numite viteze generalizatesi ın mod analog marimile qk ; k = 1, . . . , n sunt numite acceleratii generalizate .
Ecuatiile Lagrange pentru sisteme olonome constituie un sistem de n ecuatii dife-rentiale de ordinul doi pentru functiile necunoscute qk = qk(t) ; k = 1, . . . , n . Pentru averifica aceasta afirmatie, se porneste de la observatia ca energia cinetica a sistemului ın Λn
are expresia :
T =1
2
N∑
i=1
mir2i =
1
2
N∑
i=1
mi
(n∑
k=1
∂ri
∂qk
qk +∂ri
∂t
)
n∑
j=1
∂ri
∂qj
qj +∂ri
∂t
=
=1
2
n∑
k,j=1
akj qkqj +n∑
k=1
akqk + a0 (10.21)

10.2. ECUATIILE LAGRANGE PENTRU SISTEME OLONOME 257
unde coeficientii
akj =N∑
i=1
mi∂ri
∂qk
∂ri
∂qj
; ak =N∑
i=1
mi∂ri
∂qk
∂ri
∂t; a0 =
1
2
N∑
i=1
mi
(∂ri
∂t
)2
(10.22)
sunt ın general functii de timpul t si de coordonatele generalizate (q1, . . . , qn) . Energiacinetica (10.21) mai poate fi scrisa formal :
T = T2 + T1 + T0 (10.23)
unde T2 este o forma patratica ın vitezele generalizate, T1 este o forma liniara de acesteviteze, iar T0 este o forma de grad zero ın raport cu variabilele respective, expresiileacestor termeni obtinandu-se prin identificare.
In cazul unui sistem scleronom , timpul nu poate interveni explicit ın relatiile (10.2)
dintre coordonatele ın spatiul fizic si coordonatele generalizate, adica∂ri
∂t= 0 ; i = 1, . . . , N .
Atunci, conform definitiilor (10.22) va trebui ca a0 = 0 si ak = 0 ; k = 1, . . . , n , ceea ce aredrept consecinta faptul ca T0 = T1 = 0 . In consecinta, energia cinetica a unui sistemscleronom se reduce la forma patratica :
T = T2 =1
2
n∑
k,j=1
akj qkqj =1
2
n∑
k,j=1
(N∑
i=1
mi∂ri
∂qk
∂ri
∂qj
)qkqj (10.24)
Se observa ca forma patratica T2 ın vitezele generalizate este ıntotdeauna pozitiv defi-nita . Intr-adevar, scriind T2 sub forma :
T2 =1
2
N∑
i=1
mi
(n∑
k=1
∂ri
∂qk
qk
)2
≥ 0 (10.25)
rezulta ca T2 este o forma patratica ın raport cu sumelen∑
k=1
∂ri
∂qk
qk ; i = 1, . . . , N . Pentru
orice valori ale acestor sume va trebui ca T2 ≥ 0 , valoarea zero realizandu-se atunci candaceste sume se anuleaza simultan :
n∑
k=1
∂ri
∂qk
qk = 0 ; i = 1, . . . , N (10.26)
Deoarece corespondenta (10.2) este biunivoca, rangul matricei coeficientilor marimilorqk ; k = 1, . . . , n din aceste ecuatii este n si atunci solutia unica a sistemului (10.26) vatrebui sa fie solutia nula qk = 0 ; k = 1, . . . , n . In consecinta T2 este ıntr-adevar o formapatratica pozitiv definita.
In fine, o proprietate foarte utila ın aplicatii este aceea ca determinantul matricei A ,construita pe coeficientii formei patratice T2 , este ıntotdeauna diferit de zero :
detA = det (akj) 6= 0 ; k, j = 1, . . . , n (10.27)
Daca nu ar fi asa, atunci sistemul algebric liniarn∑
k=1
akj qk = 0 ; j = 1, . . . , n ar admite o
solutie nebanala. Insa ınmultind aceste ecuatii cu qj ; j = 1, . . . , n si sumand ın raport cu j ,

258 CAPITOLUL 10. SISTEME OLONOME
rezulta 2T2 = 0 fara ca toti qk ; k = 1, . . . , n sa fie nuli, ceea ce contrazice faptul ca T2 esteo forma pozitiv definita.
In baza acestei proprietati se poate arata ca fiind date valorile la momentul initial alecoordonatelor si vitezelor generalizate, ecuatiile Lagrange (10.20) definesc ın mod unicmiscarea sistemului . Deoarece din (10.21) rezulta ca :
∂T
∂qk
=n∑
j=1
akj qj + ak ; k = 1, . . . , n (10.28)
derivata totala dupa timp va avea expresia :
d
dt
(∂T
∂qk
)=
n∑
j=1
akj qj +n∑
j=1
akj qj + ak ; k = 1, . . . , n (10.29)
Pe de alta parte termenii∂T
∂qk
si Qk(t, q, q) din ecuatiile Lagrange (10.20) nu contin explicit
acceleratiile generalizate, ei fiind functii doar de timp, coordonate si viteze generalizate.Grupand ımpreuna toti termenii care nu contin acceleratii, ecuatiile Lagrange de speta aII-a pot fi scrise formal :
n∑
j=1
akj qj =∼Qk (t, q, q) ; k = 1, . . . , n (10.30)
Conform proprietatii (10.27), sistemul poate fi rezolvat ın raport cu acceleratiile generalizateqk ; k = 1, . . . , n si adus la forma generala :
qk =≈Qk (t, q, q) ; k = 1, . . . , n (10.31)
Admitand ca functiile Qk = Qk(t, q, q) sunt date si ındeplinesc conditiile cunoscute de con-tinuitate, solutia sistemului (10.31) exista si este unica. Daca la momentul initial t = t0 sestie ca :
qk(t0) = q0k , qk(t0) = q0
k ; k = 1, . . . , n (10.32)
solutia sistemului (10.31) are forma generala :
qk = qk(t, t0, q01, . . . , q
0n, q0
1, . . . , q0n) ; k = 1, . . . , n (10.33)
ceea ce reprezinta ecuatiile parametrice ale traiectoriei punctului figurativ al sistemului ınspatiul configuratiilor Λn . In continuare, daca problema o cere, folosind relatiile (10.2)poate fi determinata miscarea sistemului ın spatiul fizic : ri = ri(t) ; i = 1, . . . , N . Reactiilelegaturilor, care nu figureaza explicit ın ecuatiile Lagrange, pot fi determinate din ecuatiileRi = miai − Fi ; i = 1, . . . , N , unde acceleratiile ai = ri ; i = 1, . . . , N se calculeaza usorfiind deja cunoscuta miscarea ın spatiul fizic.
Ecuatiile Lagrange au un caracter intrinsec , adica forma lor nu depinde de alege-rea setului de coordonate generalizate (q1, . . . , qn) folosite pentru descrierea miscarii siste-mului. Pentru a verifica aceasta, presupunem ca pentru a descrie miscarea este ales setul de

10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 259
coordonate (q′1, . . . , q′n) , aflat ın corespondenta biunivoca cu vechiul sistem de coordonate
(q1, . . . , qn) :
qk = qk(t, q′1, . . . , q
′n) , det
(∂qk
∂q′j
)6= 0 ; k, j = 1, . . . , n (10.34)
Deoarece :
qk =n∑
j=1
∂qk
∂q′jq′j +
∂qk
∂t; k = 1, . . . , n (10.35)
atunci :
∂qk
∂q′j=
∂qk
∂q′j,
∂qk
∂q′j=
n∑
l=1
∂2qk
∂q′j∂q′lq′l +
∂2qk
∂q′j∂t=
d
dt
(∂qk
∂q′j
); k, j = 1, . . . , n (10.36)
Notand cu T ′ = T ′(t, q′, q′) si Q′k = Q′
k(t, q′, q′) ; k = 1, . . . , n energia cinetica, respectiv
coordonatele fortei generalizate ın noul sistem de coordonate, conform definitiilor lor vatrebui ca :
∂T ′
∂q′j=
n∑
k=1
(∂T
∂qk
∂qk
∂q′j+
∂T
∂qk
∂qk
∂q′j
)=
n∑
k=1
[∂T
∂qk
∂qk
∂q′j+
∂T
∂qk
d
dt
(∂qk
∂q′j
)]
∂T ′
∂q′j=
n∑
k=1
(∂T
∂qk
∂qk
∂q′j
)=
n∑
k=1
(∂T
∂qk
∂qk
∂q′j
); j = 1, . . . , n (10.37)
Q′j =
N∑
i=1
Fi∂ri
∂q′j=
N∑
i=1
Fi
(n∑
k=1
∂ri
∂qk
∂qk
∂q′j
)=
n∑
k=1
(N∑
i=1
Fi∂ri
∂qk
)∂qk
∂q′j=
n∑
k=1
Qk∂qk
∂q′j
In final rezulta :
d
dt
(∂T ′
∂q′j
)− ∂T ′
∂q′j−Q′
j =n∑
k=1
[d
dt
(∂T
∂qk
)− ∂T
∂qk
−Qk
]∂qk
∂q′j= 0 ; j = 1, . . . , n (10.38)
In baza ipotezei (10.34) si a ecuatiilor (10.20), expresiile (10.38) sunt nule pentru orice valoareposibila a lui j . In consecinta forma ecuatiilor Lagrange de speta a II-a este invarianta ınraport cu alegerea setului de coordonate generalizate, folosit pentru rezolvarea problemei.
10.3 Teorema energiei - forte potentiale si nepotentiale
In cazul unor forte generalizate care nu depind de viteze :
Qk = Qk(t, q1, . . . , qn) ; k = 1, . . . , n (10.39)
daca exista o functie V (t, q1, . . . , qn) astfel ıncat :
Qk = − ∂V
∂qk
; k = 1, . . . , n (10.40)

260 CAPITOLUL 10. SISTEME OLONOME
fortele Qk ; k = 1, . . . , n sunt numite potentiale , functia V (t, q) reprezentand potentialulfortelor , sau energia potentiala . In acest caz, lucrul mecanic elementar la o deplasarevirtuala are expresia :
δL =n∑
k=1
Qkδqk = −n∑
k=1
∂V
∂qk
δqk = − δV (10.41)
Se poate verifica usor ca daca fortele efective Fi ; i = 1, . . . , N ın spatiul fizic aplicatesistemului sunt potentiale , adica daca exista o functie V (t, r1, . . . , rN) asa ıncat :
Fix = − ∂V
∂xi
; Fiy = − ∂V
∂yi
; Fiz = − ∂V
∂zi
(10.42)
atunci si fortele generalizate Qk(t, q1, . . . , qn) ; k = 1, . . . , n ın spatiul configuratiilor,sunt tot potentiale , functia potential V (t, q1, . . . , qn) fiind aceeasi, ınsa exprimata ın co-ordonate generalizate. Intr-adevar, folosind (10.42) si (10.41), se va putea scrie :
δL =N∑
i=1
Fi δri = − δV = −n∑
k=1
∂V
∂qk
δqk =n∑
k=1
Qk δqk (10.43)
de unde rezulta definitiile (10.40). Afirmatia inversa nu este ıntotdeauna adevarata!
Consideram si cazul mai general cand ın afara fortelor potentiale determinate depotentialul V , asupra sistemului actioneaza si forte nepotentiale, scrise ın general sub forma :
Q∗k = Q∗
k(t, q1, . . . , qk, q1, . . . , qn) ; k = 1, . . . , n (10.44)
In acesta situatie se va putea scrie :
Qk = − ∂V
∂qk
+ Q∗k ; k = 1, . . . , n (10.45)
ecuatiile Lagrange de speta a II-a capatand forma :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= − ∂V
∂qk
+ Q∗k ; k = 1, . . . , n (10.46)
Prin definitie, energia mecanica totala a sistemului reprezinta suma dintre energiacinetica si cea potentiala :
E = T + V (10.47)
Pentru a evalua derivata dupa timpdE
dt, va fi calculata mai ıntai derivata :
dT
dt=
n∑
k=1
∂T
∂qk
qk +n∑
k=1
∂T
∂qk
qk +∂T
∂t=
n∑
k=1
∂T
∂qk
dqk
dt+
n∑
k=1
∂T
∂qk
qk +∂T
∂t=
=d
dt
(n∑
k=1
∂T
∂qk
qk
)+
n∑
k=1
[∂T
∂qk
− d
dt
(∂T
∂qk
)]qk +
∂T
∂t(10.48)

10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 261
Avand ın vedere ca ın general T = T2 +T1 +T0 , conform teoremei lui Euler asupra functiiloromogene, se va putea scrie :
n∑
k=1
∂T2
∂qk
qk = 2 · T2 ;n∑
k=1
∂T1
∂qk
qk = 1 · T2 ;n∑
k=1
∂T0
∂qk
qk = 0 · T2 (10.49)
Facand aceste ınlocuiri ın (10.48) si tinand cont de ecuatiile Lagrange (10.46), rezulta ıncontinuare :
dT
dt=
d
dt(2T2 + T1) +
n∑
k=1
(∂V
∂qk
−Q∗k
)qk +
∂T
∂t=
= 2dT
dt− d
dt(T1 + 2T0) +
dV
dt− ∂V
∂t−
n∑
k=1
Q∗k qk +
∂T
∂t(10.50)
Folosind definitia (10.47), se obtine ın final :
dE
dt=
n∑
k=1
Q∗k qk +
d
dt(T1 + 2T0)− ∂T
∂t+
∂V
∂t(10.51)
Aici termenuln∑
k=1
Q∗k qk reprezinta puterea fortelor nepotentiale , urmatorii doi termeni
d
dt(T1 + 2T0)− ∂T
∂tsunt diferiti de zero doar ın cazul sistemelor reonome , iar ultimul
termen∂V
∂teste este nenul doar pentru forte potentiale nestationare .
Folosind formula (10.51) pot fi facute o serie de afirmatii privind variatia energiei totalea unui sistem olonom arbitrar aflat ın miscare. Consideram cateva cazuri particulare :
a. In cazul unui sistem scleronom , expresia (10.51) se reduce la :
dE
dt=
n∑
k=1
Q∗k qk +
∂V
∂t(10.52)
b. In cazul unui sistem scleronom asupra caruia actioneaza forte potentialestationare :
dE
dt=
n∑
k=1
Q∗k qk (10.53)
c. In cazul unui sistem conservativ , care este un sistem scleronom caruia ıi suntaplicate numai forte potentiale stationare, din ecuatia (10.51) rezulta :
dE
dt= 0 adica E = const. (= h) (10.54)
Deci, energia totala a sistemului conservativ nu se modifica ın cursul miscariisistemului . Deoarece ecuatia E = h nu contine acceleratiile generalizate qk ; k = 1, . . . , n ,iar h este o constanta determinata de conditiile initiale, expresia (10.54) va reprezenta ointegrala prima a ecuatiilor de miscare, numita si integrala energiei .

262 CAPITOLUL 10. SISTEME OLONOME
In ceea ce priveste fortele nepotentiale , acestea apartin ın majoritatea cazurilor launa din urmatoarele doua categorii :
- forte giroscopice , daca puterea lor este nula :
n∑
k=1
Q∗ gk qk = 0 (10.55)
- forte disipative , daca puterea lor este negativa :
n∑
k=1
Q∗ dk qk ≤ 0 (10.56)
Aceasta clasificare a fortelor nepotentiale generalizate este ın acord cu cea folosita sipentru fortele nepotentiale ın spatiul fizic. Intr-adevar, deoarece pentru un sistem scleronomN∑
i=1
Fi dri =n∑
k=1
Qk dqk , puterea fortelor aplicate sistemului este :
δLdt
=N∑
i=1
Fi · vi =n∑
k=1
Qk qk (10.57)
Din acest motiv ecuatiile (10.55) si (10.56) exprima conditiile de giroscopicitate, respectivde disipativitate pentru fortele respective :
δLg
dt=
N∑
i=1
Fgi · vi = 0 ,
δLd
dt=
N∑
i=1
Fdi · vi ≤ 0 (10.58)
Trebuie observat ca ın cazul unui sistem reonom, expresia (10.57) nu mai este adevarata,
deoarece ın acesta situatie δri = dri − ∂ri
∂tdt si din egalitatea
N∑
i=1
Fi δri =n∑
k=1
Qk δqk rezulta
caN∑
i=1
Fi ·(vi − ∂ri
∂t
)=
n∑
k=1
Qk qk .
Sa observam ca ın cazul sistemului scleronom, asupra caruia actioneaza forte potentialestationare si forte giroscopice, energia mecanica totala este o constanta. Daca asupra unuiastfel de sistem actioneaza si forte disipative, atunci E ≤ 0 , ceea ce ınseamna ca ıntr-o astfelde situatie, energia mecanica totala a sistemului scade (este disipata) ın cursul miscarii,motiv pentru care un astfel de sistem este numit sistem disipativ .
In multe probleme de miscare, fortele generalizate nepotentiale Q∗k ; k = 1, . . . , n sunt
forme liniare si omogene ın vitezele generalizate qk ; k = 1, . . . , n , caz ın care clasificarea demai sus se reflecta ın anumite proprietati asupra coeficientilor formelor respective.
Daca :
Q∗ gk =
n∑
j=1
γkj qj ; k = 1, . . . , n (10.59)
si matricea coeficientilor este antisimetrica , adica :
γkj = − γjk , γkk = 0 ; k, j = 1, . . . , n (10.60)

10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 263
atunci fortele (10.59) sunt giroscopice . Intr-adevar :
n∑
k=1
Q∗ gk qk =
n∑
k,j=1
γkj qkqj =n∑
k=1
γkkq2k +
n∑
i<j
(γkj + γjk) qkqj = 0 (10.61)
Un exemplu tipic de forte giroscopice care pot actiona asupra unui sistem scleronom ılreprezinta fortele Coriolis . Dupa cum se stie, aceste forte au expresia :
F gC i = − 2mi (ω × vi) (10.62)
unde mi este masa particulei Pi , vi este viteza sa ın raport cu sistemul de referinta mobil(neinertial), iar ω este vectorul rotatie al acestui sistem ın raport cu un sistem de referintainertial. Este evident ca aceste forte satisfac conditia de giroscopicitate :
N∑
i=1
F gC i · vi = − 2
N∑
i=1
mivi (ω × vi) = 0 (10.63)
Un alt exemplu de forta giroscopica este forta Lorentz qi (vi ×B) .Daca :
Q∗ dk = −
n∑
j=1
bkj qj ; k = 1, . . . , n (10.64)
ınsa matricea coeficientilor este simetrica :
bkj = bjk ; k, j = 1, . . . , n (10.65)
si ın plus forma patratica ın viteze, construita pe acesti coeficienti :
n∑
k,j=1
bkj qkqj ≥ 0 (10.66)
este pozitiv definita, atunci fortele (10.64) sunt disipative , deoarece :
n∑
k=1
Q∗ dk qk = −
n∑
k,j=1
bkj qkqj ≤ 0 (10.67)
Se verifica direct ca fortele generalizate (10.64) pot fi obtinute din forma patratica :
D =1
2
n∑
k,j=1
bkj qkqj (10.68)
prin intermediul formulelor :
Q∗ dk = − ∂D
∂qk
; k = 1, . . . , n (10.69)
Forma patratica (10.68) reprezinta functia disipativa a lui Rayleigh , sensul ei fizicfiind evident daca observam ca pentru un sistem scleronom, asupra caruia actioneaza fortepotentiale stationare si forte disipative de forma (10.69), rezulta :
dE
dt=
n∑
k=1
Q∗ dk qk = −
n∑
k=1
∂D
∂qk
qk = − 2 D (10.70)

264 CAPITOLUL 10. SISTEME OLONOME
unde a fost utilizata si teorema lui Euler pentru functii omogene. Astfel, pentru cazuldiscutat, dublul functiei disipative a lui Rayleigh reprezinta viteza de scadere a energieimecanice totale a sistemului. Daca functia D este o forma patratica pozitiv definita ınvitezele qk ; k = 1, . . . , n , atunci energia totala a sistemului este strict descrescatoare ıncursul miscarii.
In categoria fortelor disipative intra fortele de rezistenta opuse de un mediu asuprapunctelor unui sistem aflat ın miscare relativ lenta. Aceste forte sunt direct proportionale side sens contrar cu vitezele punctelor :
F di = − kivi , ki > 0 ; i = 1, . . . , N (10.71)
Coordonatele fortei generalizate vor fi:
Q∗ dk =
N∑
i=1
F di
∂ri
∂qk
= −N∑
i=1
ki ri∂ri
∂qk
= −N∑
i=1
ki ri∂ri
∂qk
= − ∂
∂qk
(1
2
N∑
i=1
ki r2i
); k = 1, . . . , n
(10.72)Avand ın vedere (10.69), functia disipativa a lui Rayleigh are ın acest caz expresia :
D = − 1
2
N∑
i=1
F di · vi =
1
2
N∑
i=1
kiv2i =
1
2
N∑
i=1
ki
(n∑
k=1
∂ri
∂qk
qk +∂ri
∂t
)2
=
=1
2
n∑
k,j=1
bkj qkqj +n∑
k=1
bk qk + b0 = D2 + D1 + D0 (10.73)
unde
bkj =N∑
i=1
ki∂ri
∂qk
∂ri
∂qj
, bk =N∑
i=1
ki∂ri
∂qk
∂ri
∂t, b0 =
1
2
N∑
i=1
ki
(∂ri
∂t
)2
; k, j = 1, . . . , n
(10.74)Daca sistemul este scleronom, atunci D1 = D0 = 0 si functia disipativa a lui RayleighD = D2 va coincide cu expresia (10.68), ındeplinind totodata conditiile (10.65) si (10.66).
Aplicatii
1. Sa se scrie ecuatiile Lagrange de speta a doua ın coordonate carteziene, polare si sferice,pentru un punct material liber de masa m , asupra caruia actioneaza o forta data F .
Rezolvare : In lipsa legaturilor, deoarece r = r (q1, q2(, q3)), ın toate cazurile va fi utilizatarelatia :
v =dr
dt=
2(3)∑
k=1
∂r
∂qk
qk (1)
a. Coordonate carteziene : q1 = x , q2 = y , q3 = z . Ecuatia (1) se scrie :
v = x i + y j + z k =∂r
∂xx +
∂r
∂yy +
∂r
∂zz (2)
Energia cinetica va avea expresia :
T =1
2m
(x2 + y2 + z2
)(3)
10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 265
iar derivatele sale vor fi :
∂T
∂x= m x ,
d
dt
(∂T
∂x
)= m x ;
∂T
∂x= 0
∂T
∂y= m y ,
d
dt
(∂T
∂y
)= m y ;
∂T
∂y= 0
∂T
∂z= m z ,
d
dt
(∂T
∂z
)= m z ;
∂T
∂z= 0
(4)
Coordonatele fortei generalizate vor avea forma :
Qx = F · ∂r
∂x= F · i = Fx
Qy = F · ∂r
∂y= F · j = Fy
Qz = F · ∂r
∂z= F · k = Fz
(5)
Ecuatiile Lagrange vor avea astfel expresiile :
mx = Fx
m y = Fy
m z = Fz
(6)
b. Coordonate polare : q1 = r , q2 = θ . Ecuatia (1) se scrie :
v = r er + rθ eθ =∂r
∂rr +
∂r
∂θθ (7)
Energia cinetica va avea expresia :
T =1
2m
(r2 + r2θ2
)(8)
iar derivatele sale vor fi :
∂T
∂r= m r ,
d
dt
(∂T
∂r
)= m r ;
∂T
∂r= mrθ2
∂T
∂θ= mr2θ ,
d
dt
(∂T
∂θ
)= mr
(2rθ + rθ
);
∂T
∂θ= 0
(9)
Folosind relatia (7) pot fi calculate usor coordonatele fortei generalizate :
Qr = F · ∂r
∂r= F · er = Fr
Qθ = F · ∂r
∂θ= r (F · eθ) = r Fθ
(10)

266 CAPITOLUL 10. SISTEME OLONOME
Ecuatiile Lagrange vor avea expresiile :
m(r − rθ2
)= Fr
m(2rθ + rθ
)= Fθ
(11)
c. Coorodnate sferice : q1 = r , q2 = θ , q3 = ϕ . Ecuatia (1) va avea forma :
v = r er + rθ eθ + rϕ sin θ eϕ =∂r
∂rr +
∂r
∂θθ +
∂r
∂ϕϕ (12)
Energia cinetica a punctului va fi :
T =1
2m
(r2 + r2θ2 + r2ϕ2 sin2 θ
)(13)
iar derivatele sale au expresiile :
∂T
∂r= m r ,
d
dt
(∂T
∂r
)= m r ;
∂T
∂r= m
(rθ2 + rϕ2 sin2 θ
)
∂T
∂θ= mr2θ ,
d
dt
(∂T
∂θ
)= mr
(2rθ + rθ
);
∂T
∂θ= mr2ϕ2 sin θ cos θ
∂T
∂ϕ= mr2ϕ sin2 θ ,
d
dt
(∂T
∂ϕ
)= mr sin θ (2rϕ sin θ + ;
∂T
∂ϕ= 0
+ 2rθϕ cos θ + rϕ sin θ)
(14)
Coordonatele fortei generalizate se calculeaza cu formulele :
Qr = F · ∂r
∂r= F · er = Fr
Qθ = F · ∂r
∂θ= r (F · eθ) = r Fθ
Qϕ = F · ∂r
∂ϕ= r sin θ (F · eϕ) = r sin θ Fϕ
(15)
Ecuatiile Lagrange vor fi astfel :
m(r − rθ2 − rϕ2 sin θ
)= Fr
m(2rθ + rθ − rϕ2 sin θ cos θ
)= Fθ
m(2rϕ sin θ + 2rθϕ cos θ + rϕ sin θ
)= Fϕ
(16)
2. Un punct material de masa m este legat ıntre doua resoarte identice de constanta elastica ksi lungime l ın stare nedeformata. Cunoscand ca extremitatile resoartelor sunt fixate la o distantaconstanta 2l , sa se determine miscarea daca sistemul este plasat : a) ın pozitie orizontala (seneglijeaza greutatea) ; b) ın pozitie verticala.

10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 267
Rezolvare : In ambele situatii sistemul are un singur grad de libertate. Alegand axa Oxcoliniara cu sistemul, originea fiind la una din extremitati, energia cinetica va avea expresia :
T =1
2mx2 (1)
a) In pozitie orizontala, forta generalizata asociata coordonatei x va avea expresia :
Qx = F · i = Fx = − 2k (x− l) (2)
Acelasi rezultat se poate obtine si pornind de la expresia pentru energia potentiala elastica totalaa sistemului :
V = 2 · 1
2k (x− l)2 si Qx = − ∂V
∂x= − 2k (x− l) (3)
Ecuatia Lagrange va avea forma :
mx + 2k (x− l) = 0 (4)
adica :
x + ω2 (x− l) = 0 unde ω2 =2k
m(5)
Facand schimbarea :x′ = x− l (6)
ecuatia (5) devine :x′ + ω2x′ = 0 (7)
si are solutia generala :x′(t) = α cos(ωt + β) (8)
Ecuatia generala de miscare a punctului de masa m va fi astfel :
x(t) = l + α cos(ωt + β) (9)
Miscarea va fi oscilatorie cu perioada T = 2π
√m
2kın jurul pozitiei de echilibru x0 = l .

268 CAPITOLUL 10. SISTEME OLONOME
b) In pozitie verticala, forta generalizata are expresia :
Qx = F · i = Fx = − 2k (x− l) + mg (10)
Rezultatul se putea obtine si pornind de la expresia pentru energia potentiala totala a sistemului :
V = k (x− l)2 −mgx si Qx = − ∂V
∂x= − 2k (x− l) + mg (11)
Ecuatia Lagrange va fi :mx + 2k (x− l)−mg = 0 (12)
Transcriind (12) sub forma :
x + ω2(x− l − mg
2k
)unde ω2 =
2k
m(13)
si facand schimbarea de functie :
x′ = x− l − mg
2k(14)
va rezulta ın final solutia :
x(t) = l +mg
2k+ α cos(ωt + β) (15)
Miscarea va fi oscilatorie, cu aceeasi perioada ca si ın pozitie orizontala, ın jurul pozitiei de
echilibru x0 = l +mg
2k.
In ambele situatii, constantele α si β se determina din conditiile initiale.
3. Doua corpuri avand masele m1 si m2 pot aluneca fara frecare pe un plan ınclinat fix dublu,fiind legate printr-un fir inextensibil de lungime l si masa neglijabila, trecut peste un scripete fix Oa carui masa de asemenea se neglijeaza. Cunoscand unghiurile α1 si α2 facute de laturile planuluiınclinat cu orizontala, sa se determine acceleratia sistemului.
Rezolvare : Alegand sistemul de referinta ca ın figura, se observa ca legaturile finite inde-pendente au ecuatiile :
x1
sin α1
+x2
sin α2
= l , tg α1 = − x1
y1
, tg α2 =x2
y2
(1)
ceea ce ınseamna ca sistemul are un singur grad de libertate. Alegand x1 drept coordonatageneralizata, energia cinetica va fi :
T =1
2
2∑
i=1
mi
(x2
i + y2i
)=
1
2
2∑
i=1
mi
(1 +
1
tg2αi
)x2
i =1
2
2∑
i=1
mi
sin2 αi
x2i =
1
2
m1 + m2
sin2 α1
x21 (2)

10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 269
Aplicand definitia, coordonata fortei generalizate va fi :
Qx1 =2∑
i=1
Fi∂ri
∂x1
=2∑
i=1
mig∂xi
∂x1
= m1g −m2gsin α2
sin α1
=m1 sin α1 −m2 sin α2
sin α1
g (3)
Coordonata fortei generalizate se putea calcula si cu formula Qx1 = − ∂V
∂x1
unde energia
potentiala a sistemului are expresia :
V = −2∑
i=1
migxi = −m1gx1 + m2gsin α2
sin α1
x1 = − m1 sin α1 −m2 sin α2
sin α1
gx1 (4)
La evaluarea tuturor acestor expresii au fost folosite ecuatiile (1). Reunind rezultatele, ecuatiaLagrange are forma :
m1 + m2
sin2 α1
x1 =m1 sin α1 −m2 sin α2
sin α1
g (5)
de unde rezulta :
x1 =m1 sin α1 −m2 sin α2
m1 + m2
g sin α1 (6)
Acceleratia sistemului 1 va fi :
a =√
x21 + y2
1 =x1
sin α1
=m1 sin α1 −m2 sin α2
m1 + m2
g (7)
4. Peste un scripete fix omogen de raza R si masa M este trecut un fir inextensibil avandlungimea l , de capetele caruia sunt suspendate masele m1 si m2 . Sa se calculeze acceleratiasistemului daca m1 > m2 . Se neglijeaza masa firului, iar acesta nu poate aluneca pe scripete.
1 Alegand drept coodonate distantele r1 si r2 la cele doua corpuri si avand ın vedere ecuatia legaturii r1+r2 = l ,pentru energia cinetica rezulta :
T =12
2∑
i=1
mir2i =
12
(m1 + m2) r21
iar forta generalizata corespunzatoare coordonatei r1 va fi :
Qr1 =2∑
i=1
Fi∂ri
∂r1=
2∑
i=1
mig sin αi∂ri
∂r1= (m1 sin α1 −m2 sin α2) g
Ultima relatie putea fi calculata folosind pentru energia potentiala expresia :
V = −2∑
i=1
m1gx1 = −2∑
i=1
m1g sin αi ri = − (m1 sinα1 −m2 sin α2) gr1 + C
Din ecuatia Lagrange :(m1 + m2) r1 = (m1 sin α1 −m2 sin α2) g
rezulta direct acceleratia sistemului :
a = r1 =m1 sin α1 −m2 sin α2
m1 + m2g

270 CAPITOLUL 10. SISTEME OLONOME
Rezolvare : Problema este unidimensionala, deoarece conform enuntului exista doua legaturi.Una dintre ele exprima faptul ca firul este inextensibil, iar cealalta se refera la faptul ca firul nupoate aluneca pe scripete :
x1 + x2 = l − πR , x1 = R ϕ (ϕ = ω) (1)
Energia cinetica totala a sistemului va avea expresia :
T =1
2
2∑
i=1
mix2i +
1
2Iω2 =
1
2(m1 + m2) x2
1 +1
2Iϕ2 =
1
2
(m1 + m2 +
I
R2
)x2
1 (2)
unde s-a ales x1 drept coordonata generalizata. Forta generalizata corespunzatoare va fi :
Qx1 =2∑
i=1
mig∂ri
∂x1
= (m1 −m2) g (3)
Ultima expresia se poate calcula si cu formula Qx1 = − ∂V
∂x1
unde :
V = −2∑
i=1
migxi = − (m1 −m2) gx1 + C (4)
Facand ınlocuirile ın ecuatia Lagranged
dt
(∂T
∂x1
)− ∂T
∂x1
= Qx1 care are forma explicita :
(m1 + m2 +
I
R2
)x2
1 = (m1 −m2) g (5)
rezulta expresia cautata pentru acceleratia sistemului :
a = x1 =m1 −m2
m1 + m2 +I
R2
g =m1 −m2
m1 + m2 +1
2M
g (6)
unde momentul de inertie al scripetelui este I =1
2MR2 .

10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 271
5. Un fir inextensibil de masa neglijabila este trecut peste un scripete fix de masa MA . Seleaga de un capat al firului o masa m , iar celalalt capat al firului este ınfasurat pe un tamburomogen de masa MB . Presupunand ca firul nu poate aluneca pe scripete, sa se determinemiscarea sistemului daca la momentul initial el porneste din repaus.
Rezolvare : In absenta legaturilor, pozitia sistemului este precizata cu ajutorul a patru pa-rametri : unul pentru abscisa corpului m , unul pentru rotatia scripetelui A , cate unul pentrupentru abscisa si rotatia tamburului B . Conform enuntului exista doua legaturi cinematice :
xm = RAωa , − xm = xB −RAωA (1)
deci sistemul are doua grade de libertate. Energia cinetica a sistemului se compune din treitermeni :
a) energia cinetica de translatie a corpului m :
Tm =1
2mx2
m (2)
b) energia cinetica de rotatie a scripetelui A :
TA =1
2IAω2
A ; IA =1
2MAR2
A , ωA =xm
RA
(3)
c) energia cinetica de translatie si de rotatie a tamburului B :
TB =1
2MBx2
M +1
2IBω2
B ; IB =1
2MBR2
B , ωB =xm + xB
RB
(4)
Reunind rezultatele, energia totala a sistemului va avea expresia :
T =1
2
(m +
1
2MA
)x2
m +1
2MBx2
B +1
4MB (xm + xB)2 (5)
Deoarece energia potentiala totala este :
V = −mgxm −MBgxB (6)

272 CAPITOLUL 10. SISTEME OLONOME
coordonatele fortei generalizate vor fi :
Qxm = mg , QxB= MBg (7)
Ecuatiile Lagrange vor avea forma :
(m +
1
2MA +
1
2MB
)xm +
1
2MBxB = mg
1
2MBxm +
3
2MBxB = MBg
(8)
Rezolvand sistemul ın raport cu xm si xB rezulta :
xm =2 (3m−MB)
6m + 3MA + 2MB
g , xB =2 (m + MA + MB)
6m + 3MA + 2MB
g (9)
Deoarece la momentul initial sistemul porneste din repaus, se obtine ın final :
xm(t) = x0m +
2 (3m−MB)
6m + 3MA + 2MB
· gt2
2, xB(t) = x0
B +2 (m + MA + MB)
6m + 3MA + 2MB
· gt2
2(10)
6. Un corp de masa m poate aluneca fara frecare pe un plan ınclinat de masa M si unghi α ,care la randul sau aluneca fara frecare pe un plan orizontal. Sa se studieze miscarea sistemului,daca la momentul initial acesta se gaseste ın repaus, iar corpul m se afla ın varful planului ınclinat.Cum se modifica rezultatele, daca corpul m este un disc circular omogen care se rostogoleste faraalunecare ın lungul planului?
Rezolvare : Sistemul are doua grade de libertate, cele doua coordonate care precizeaza univocpozitia sistemului la un moment dat fiind x care reprezinta abscisa muchiei verticale a planuluiınclinat si x′ care reprezinta abscisa ın lungul planului ınclinat a centrului de masa a corpului m .Coordonatele ın raport cu sistemul fix ale centrului de masa pentru corpul de masa m vor fi :
xm = x + x′ cos α
ym = l sin α− x′ sin α(1)
Energia cinetica a sistemului va avea astfel expresia :
T =1
2Mx2 +
1
2m
(x2
m + y2m
)=
1
2(M + m) x2 +
1
2m
(x′
2+ 2xx′ cos α
)(2)
10.3. TEOREMA ENERGIEI - FORTE POTENTIALE SI NEPOTENTIALE 273
Deoarece forta Mg este perpendiculara pe directia de deplasare a planului ınclinat, unica fortacare produce lucru mecanic este mg . Coordonatele fortei generalizate vor fi :
Qx = mg∂rm
∂x= −mg
∂ym
∂x= 0 , Qx′ = mg
∂rm
∂x′= −mg
∂ym
∂x′= mg sin α (3)
La aceleasi rezultate se poate ajunge pornind de la expresia energiei potentiale :
V = mgym = −mgx′ sin α + C (4)
de unde :
Qx = − ∂V
∂x= 0 , Qx′ = − ∂V
∂x′= mg sin α (5)
Sistemul de ecuatii Lagrange corespunzator va fi :
(M + m) x + m cos α x′ = 0
cos α x + x′ = g sin α(6)
Rezolvand sistemul ın raport cu necunoscutele x si x′ rezulta :
x = − m sin α cos α
M + m (1− cos2 α)g , x′ =
(M + m) sin α
M + m (1− cos2 α)g (7)
Integrand si tinand cont de conditiile initiale, vor rezulta ecuatiile de miscare ale planului ınclinatM ın raport cu sistemul de referinta fix, respectiv ale corpului m ın raport cu planul ınclinat :
x(t) = x0 − m sin α cos α
M + m (1− cos2 α)· gt2
2, x′(t) =
(M + m) sin α
M + m (1− cos2 α)· gt2
2(8)
In cazul discului care se rostogoleste fara sa alunece ın lungul planului ınclinat, numarulgradelor de libertate ramane nemodificat deoarece, desi numarul coordonatelor creste cu o unitate,la acestea adaugandu-se unghiul de rotatie proprie al discului ϕ , intervine ın plus si o legaturaavand ecuatia x′ = R ω unde ω = ϕ , care exprima constrangerea ca miscarea discului se poaterealiza exclusiv prin rostogolire. Unica modificare intervine ın expresia energiei cinetice (2) undese adauga un termen corespunzator energiei cinetice de rotatie a discului :
T = · · ·+ 1
2Iω2 = · · ·+ 1
4mx′
2(9)
Sistemul de ecuatii Lagrange capata forma :
(M + m) x + m cos α x′ = 0
cos α x +3
2x′ = g sin α
(10)
In final, ecuatiile de miscare au forma generala :
x(t) = x0 − 2m sin α cos α
3M + m (3− 2 cos2 α)· gt2
2, x′(t) =
2 (M + m) sin α
3M + m (3− 2 cos2 α)· gt2
2(11)
7. Un cilindru circular gol de raza R si masa M avand pereti de grosime neglijabila, se poaterostogoli fara alunecare pe o suprafata orizontala. In interiorul cilindrului, ın plan vertical, sepoate misca fara frecare un punct material de masa m . Sa se studieze miscarea sistemului, dacala momentul initial el porneste din repaus.

274 CAPITOLUL 10. SISTEME OLONOME
Rezolvare : Sistemul are doua grade de libertate, pozitia sa fiind cunoscuta la orice momentdaca se cunoaste valoarea abscisei x a centrului cilindrului, precum si a unghiului θ dintre razavectoare a punctului m si verticala (v. figura). Energia cinetica a cilindrului are expresia :
TC =1
2Mx2 +
1
2Iω2 = Mx2 (1)
unde s-a tinut cont si de ecuatia legaturii x = R ω , iar I = MR2 . Deoarece
xP = x + R sin θ
yP = R (1− cos θ);
xP = x + Rθ cos θ
yP = Rθ sin θ(2)
energia cinetica a punctului P va fi :
TP =1
2m
(x2
P + y2P
)=
1
2m
(x2 + R2θ2 + 2Rxθ cos θ
)(3)
iar energia cinetica totala a sistemului are expresia :
T =1
2(2M + m) x2 +
1
2m
(R2θ2 + 2Rxθ cos θ
)(4)
Deoarece rostogolirea cilindrului se face fara alunecare, forta de frecare care ia nastere ınA nu produce lucru mecanic, la fel ca si forta de greutate a cilindrului care se poate rostogolidoar orizontal. Unica forta care are contributie la energia potentiala a sistemului este greutateapunctului P , deci :
V = mg yP = mgR (1− cosθ) (5)
Coordonatele fortei generalizate vor fi astfel :
Qx = − ∂V
∂x= 0 , Qθ = − ∂V
∂θ= −mgR sin θ (6)
Ecuatiile Lagrange care descriu miscarea sistemului sunt :
d
dt
[(2M + m) x + mRθ cos θ
]= 0
R θ + x cos θ = − g sin θ(7)
Din prima ecuatie, tinand cont si de conditiile initiale x0 = θ0 = 0 , rezulta :
x = − mR
2M + mθ cos θ (8)

10.4. SISTEME NATURALE 275
Integrand din nou, se obtine ın final :
x = x0 +mR
2M + m(sin θ0 − sin θ) (9)
Sistemul fiind conservativ, energia mecanica totala se conserva :
1
2(2M + m) x2 +
1
2m
(R2θ2 + 2Rxθ cos θ
)−mgR (cos θ − cos θ0) = 0 (10)
Folosind (8), din (10) rezulta :
θ2 =2M + m
2M + m sin2 θ
2g
R(cos θ − cos θ0) (11)
Se observa ca ın raport cu cilindrul, punctul P va efectua o miscare oscilatorie cu amplitudineaunghiulara θ0 . Concomitent, centrul cilindrului va efectua o miscare oscilatorie ın lungul axei Ox
cu amplitudineamR
2M + mın jurul pozitiei de echilibru x0 +
mR
2M + msin θ0 .
Ecuatia traiectoriei punctului P se obtine din relatiile (2) si (9) :
(2M + m
2M
)2 (xP − x0 − mR
2M + msin θ0
)2
+ (yP −R)2 = R2 (12)
Rezulta ecuatia unei elipse, care este tangenta la axa Ox ın punctul x0 +mR
2M + msin θ0 si care
are o semiaxa orientata ın sus.
10.4 Sisteme naturale
10.4.1 Functia lui Lagrange
Pentru ınceput este examinata miscarea unui sistem asupra caruia sunt aplicate doar fortepotentiale Qk = Qk(t, q) ; k = 1, . . . , n , ceea ce ınseamna ca exista o functie V = V (t, q) ,asa ıncat sa fie adevarate relatiile (10.40). In aceasta situatie, ecuatiile Lagrange :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= − ∂V
∂qk
; k = 1, . . . , n (10.75)
pot fi scrise sub forma :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= 0 ; k = 1, . . . , n (10.76)
unde functia :L(t, q, q) = T (t, q, q)− V (t, q) (10.77)
este numita functia lui Lagrange sau potential cinetic al miscarii . Pentru a scrieecuatiile (10.76), s-au folosit proprietatile evidente :
∂L
∂qk
=∂T
∂qk
,∂L
∂qk
=∂T
∂qk
− ∂V
∂qk
; k = 1, . . . , n (10.78)

276 CAPITOLUL 10. SISTEME OLONOME
Se observa ca lagrangeeanul sistemului se poate scrie sub forma generala :
L = L2 + L1 + L0 (10.79)
unde, avand ın vedere (10.21) si (10.23), pentru situatia analizata rezulta :
L2 = T2 =1
2
n∑
k,j=1
akj qkqj , L1 = T1 =n∑
k=1
akqk , L0 = T0 − V = a0 − V (10.80)
Aici L2 este o forma patratica pozitiv definita ın vitezele generalizate, L1 este o forma liniaraın aceleasi varibile, iar L0 este o forma independenta de vitezele generalizate qk ; k = 1, . . . , n .Dependenta de timpul t si coordonatele generalizate qk ; k = 1, . . . , n poate fi continuta doarın coeficientii din dezvoltarile (10.80).
Ecuatiile Lagrange (10.76) ısi pastreaza forma si ın cazul ın care asupra sistemuluiactioneaza forte nepotentiale Qk(t, q, q) ; k = 1, . . . , n , daca exista un asa numit potentialgeneralizat Π(t, q, q) , care furnizeaza fortele respective cu ajutorul formulelor :
Qk =d
dt
(∂Π
∂qk
)− ∂Π
∂qk
; k = 1, . . . , n (10.81)
Functia lui Lagrange va avea ın acest caz forma generala :
L(t, q, q) = T (t, q, q)− Π(t, q, q) (10.82)
de unde rezulta :
∂L
∂qk
=∂T
∂qk
− ∂Π
∂qk
,∂L
∂qk
=∂T
∂qk
− ∂Π
∂qk
; k = 1, . . . , n (10.83)
Din definitia (10.81) rezulta ca daca Π = Π(t, q, q) , atunci :
Qk =n∑
j=1
∂2Π
∂qj∂qk
qj +n∑
j=1
∂2Π
∂qj∂qk
qj +∂2Π
∂t∂qk
− ∂Π
∂qk
; k = 1, . . . , n (10.84)
Pe de alta parte se admite ca ın mecanica fortele nu pot depinde explicit si de acceleratii,adica Qk = Qk(t, q, q) ; k = 1, . . . , n , motiv pentru care va trebui ca ın (10.84) sa avem obli-
gator∂2Π
∂qj∂qk
= 0 ; j, k = 1, . . . , n , ceea ce este posibil numai daca potentialul generalizat
Π(t, q, q) este o functie liniara de vitezele generalizate :
Π = Π1 + Π0 =n∑
j=1
Vj(t, q) qj + V (t, q) (10.85)
Se observa ca si ın acest caz, lagrangeeanul sistemului poate fi scris sub forma generalaL = L2 + L1 + L0 , unde :
L2 = T2 , L1 = T1 − Π1 , L0 = T0 − V (10.86)

10.4. SISTEME NATURALE 277
Introducand (10.85) ın definitia (10.81), se obtine :
Qk =dVk
dt− ∂
∂qk
n∑
j=1
Vj qj + V
=
∂Vk
∂t+
n∑
j=1
(∂Vk
∂qj
− ∂Vj
∂qk
)qj − ∂V
∂qk
; k = 1, . . . , n
(10.87)de unde rezulta ca daca forma liniara ın viteze Π1 a potentialului generalizat nu contine expli-
cit timpul, adica daca∂Vk
∂t= 0 ; k = 1, . . . , n , atunci fortele generalizate se compun din forte
potentiale − ∂V
∂qk
; k = 1, . . . , n si forte giroscopice de forma Q∗ gk =
n∑
j=1
γkj qj ; k = 1, . . . , n ,
unde γkj = − γjk =∂Vk
∂qj
− ∂Vj
∂qk
; k, j = 1, . . . , n .
Un exemplu tipic de potential generalizat este cel din care deriva forta Lorentz . Sestie ca forta cu care un camp electromagnetic extern (E,B) actioneaza asupra unei particulenerelativiste punctiforme ıncarcate avand sarcina e si viteza v are expresia :
F = eE + ev ×B (10.88)
unde vectorii E si B pot fi exprimati ın functie de potentialul scalar ϕ = ϕ(r, t) si potentialulvector A = A(r, t) prin intermediul formulelor :
E = − grad ϕ− ∂A
∂t, B = rotA (10.89)
Folosind drept coordonate generalizate coordonatele carteziene qk = xk , qk = xk ; k = 1, 2, 3 ,coordonatele fortei generalizate Qk ; k = 1, 2, 3 coincid cu coordonatele carteziene ale forteiLorentz Fk ; k = 1, 2, 3 . Facand ınlocuirile, se obtine :
Qk = Fk = −e∂ϕ
∂xk
− e∂Ak
∂t+ e
3∑
j=1
(∂Aj
∂xk
− ∂Ak
∂xj
)xj ; k = 1, 2, 3 (10.90)
Observand ca :
∂Ak
∂t=
dAk
dt−
3∑
j=1
∂Ak
∂xj
xj =d
dt
∂
∂xk
3∑
j=1
Ajxj
−
3∑
j=1
∂Ak
∂xj
xj ; k = 1, 2, 3 (10.91)
expresia (10.90) devine ın continuare :
Qk = −e∂ϕ
∂xk
− ed
dt
∂
∂xk
3∑
j=1
Ajxj
+ e
∂
∂xk
3∑
j=1
Ajxj
; k = 1, 2, 3 (10.92)
unde la evaluarea ultimului termen s-a tinut cont de proprietatea∂xj
∂xk
= 0 ; j, k = 1, 2, 3 .
Deoarece potentialul scalar nu depinde de viteze, se mai pot adauga expresiiile identic nuled
dt
(∂ϕ
∂xk
)= 0 ; k = 1, 2, 3 , obtinandu-se ın final :
Qk =d
dt
∂
∂xk
e ϕ− e
3∑
j=1
Ajxj
− ∂
∂xk
e ϕ− e
3∑
j=1
Ajxj
; k = 1, 2, 3 (10.93)

278 CAPITOLUL 10. SISTEME OLONOME
Comparand rezultatul cu definitia (10.81), se obtine expresia potentialului generalizat dincare deriva forta Lorentz :
Π = e ϕ− e3∑
j=1
Ajxj = e ϕ− e (v ·A) (10.94)
Lagrangeeanul care corespunde miscarii unei particule de masa m ın camp electromagneticva fi astfel :
L = T − Π =1
2mv2 − e ϕ + e (v ·A) (10.95)
Sistemele materiale pentru care fortele deriva dintr-un potential obisnuitV (t, q) sau un potential generalizat Π(t, q, q) sunt numite sisteme naturale. Pentruaceste sisteme, lagrangeeanul sistemului are forma generala L = L2 + L1 + L0 , unde L2 esteo forma patratica pozitiv definita de vitezele generalizate, L1 este o forma liniara, iar L0 esteo forma independenta de viteze. Ecuatiile de miscare ın spatiul configuratiilor Λn au forma :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= 0 , L = T −
V
Π; k = 1, . . . , n (10.96)
si printr-un procedeu analog cu cel descris ın §10.2, se arata ca pentru conditii initiale date,aceste ecuatii determina ın mod unic miscarea, daca :
det
(∂2L
∂qk∂qj
)6= 0 ; k, j = 1, . . . , n (10.97)
Se verifica direct ca functia Lagrange L(t, q, q) care satisface ecuatiile (10.96),este determinata abstractie facand de derivata totala ın raport cu timpul a uneifunctii arbitrare Φ(t, q) . Intr-adevar, lagrangeeanul :
L′ = L +dΦ
dtcu Φ = Φ(t, q) (10.98)
satisface de asemenea ecuatiile Lagrange (10.96), deoarece pentru orice functie Φ(t, q) :
d
dt
(∂Φ
∂qk
)− ∂Φ
∂qk
= 0 ; k = 1, . . . , n (10.99)
Verificarea proprietatii (10.99) se poate face direct, observand ca :
Φ =dΦ
dt=
n∑
j=1
∂Φ
∂qj
qj +∂Φ
∂t(10.100)
de unde rezulta pe de o parte :
∂Φ
∂qk
=∂Φ
∂qk
sid
dt
(∂Φ
∂qk
)=
n∑
j=1
∂2Φ
∂qj∂qk
qj +∂2Φ
∂t∂qk
(10.101)

10.4. SISTEME NATURALE 279
respectiv :∂Φ
∂qk
=n∑
j=1
∂2Φ
∂qk∂qj
qj +∂2Φ
∂qk∂t(10.102)
Proprietatea enuntata este importanta, deoarece adesea prin adaugarea la lagrangeeanulunei probleme date a derivatei totale dupa timp a unei functii alese convenabil, calcululderivatelor si implicit scrierea ecuatiilor de miscare devine mult mai simplu.
In incheiere, mentionam ca daca asupra sistemului material, pe langa forte care derivadintr-un potential simplu sau generalizat, actioneaza si forte disipative Q∗ d
k ; k = 1, . . . , n deforma (10.64) care deriva din functia disipativa D a lui Rayleigh (10.68) prin intermediulformulelor (10.69), atunci ecuatiile Lagrange ale sistemului ın spatiul Λn au forma :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= − ∂D
∂qk
; k = 1, . . . , n (10.103)
10.4.2 Impulsuri generalizate. Coordonate ciclice
Pana acum s-a acordat o atentie mai mare modului de obtinere al ecuatiilor de miscare,fara a spune aproape nimic despre metodele de rezolvare a lor ın diferite cazuri concrete. Ingeneral aceasta este o problema de matematica, fiind vorba de rezolvarea unui sistem de necuatii diferentiale de ordinul doi cu conditii initiale, daca problema are n grade de libertate.Solutia generala contine 2n constante de integrare, care se determina din conditiile initialeale problemei q0
k , q0k ; k = 1, . . . , n . In unele cazuri particulare, ecuatiile pot fi integrate
prin metode elementare, ınsa ın general gasirea solutiei analitice exacte implica dificultatimatematice deosebite.
Uneori, din cauza complexitatii calculelor, nici nu se pune problema determinarii formeiconcrete a solutiei qk(t) ; k = 1, . . . , n , multumindu-ne cu o serie de informatii cu privirela proprietatile miscarii sistemului. Aceste informatii sunt furnizate de integralele primeale sistemului de ecuatii diferentiale care descriu miscarea. Daca sistemul este natural, ointegrala prima a ecuatiilor Lagrange :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= 0 ; k = 1, . . . , n (10.104)
va fi o functie f(t, q, q) care se reduce la o constanta pentru orice t , pe solutia ecuatiilor carealcatuiesc sistemul (10.104). Aceste integrale prime :
f(t, q1, . . . , qn, q1, . . . , qn) = const. (10.105)
reprezinta niste ecuatii diferentiale de ordinul ıntai, a caror cunoastere, pe langa faptul causureaza problema determinarii miscarii, includ ın ele legi de conservare care, dupa cums-a vazut ın mecanica newtoniana, furnizeaza informatii privind caracteristicile miscarii.Cunoasterea setului complet fj(t, q, q) = Cj ; j = 1, . . . , 2n de integrale prime indepen-dente , reduce problema determinarii miscarii la gasirea solutiei unui sistem algebric, de obi-cei neliniar, de 2n ecuatii. Spre deosebire de mecanica newtoniana, unde integralele primeputeau fi scrise pornind de la unele proprietati de simetrie ale sistemului, sau cunoscand

280 CAPITOLUL 10. SISTEME OLONOME
natura fortelor aplicate, ın mecanica lagrangeeana exista un criteriu mult mai simplu si maicoerent, care permite scrierea integralelor prime.
Se considera miscarea unui sistem de puncte materiale aflat ıntr-un camp de forte carederiva dintr-un potential obisnuit. Lagrangeeanul sistemului ın coordonate carteziene, careın abesenta legaturilor pot servi drept coordonate generalizate, se va scrie :
L = T − V =1
2
N∑
i=1
mi(x2i + y2
i + z2i )− V (t, x1, y1, z1, . . . , xN , yN , zN) (10.106)
Derivata :∂L
∂xi
=∂T
∂xi
= mixi = pix (10.107)
reprezinta componenta pe axa Ox a impulsului particulei i . Generalizand aceasta observatie,impulsul generalizat pk asociat coordonatei qk va reprezenta, prin definitie , marimea :
qk −→ pk =∂L
∂qk
; k = 1, . . . , n (10.108)
Deoarece ın general L = L(t, q, q) , atunci si pk = pk(t, q, q) . Din moment ce qk poate sa nuaiba dimensiunea de lungime, nici impulsul generalizat corespunzator pk poate sa nu aibadimensiunea de impuls.
Daca lagrangeeanul unui sistem mecanic nu contine explicit o anumita coordonata gene-ralizata qα :
∂L
∂qα
= 0 (10.109)
putand ınsa contine viteza generalizata corespunzatoare qα , coordonata respectiva va finumita coordonata ciclica. Ecuatia Lagrange (10.104) corespunzatoare coordonatei res-pective devine :
d
dt
(∂L
∂qα
)=
dpα
dt= pα = 0 (10.110)
adica :pα(t, q, q) = const. (10.111)
ceea ce reprezinta, avand ın vedere (10.105), o integrala prima a ecuatiilor de miscare(10.104) ın spatiul configuratiilor Λn .
In concluzie, ın mecanica lagrangeeana teorema de conservare are urmatorul enunt :daca o coordonata generalizata qα este ciclica, atunci impulsul generalizat pα
asociat acesteia ramane constant ın tot cursul miscarii . Dupa cum se va verifica ınparagraful ce urmeaza, legile de conservare cunoscute din mecanica newtoniana reprezintacazuri particulare ale acestui enunt general.
10.4.3 Teoreme generale si legi de conservare
Teorema impulsului
Se alege o coordonata generalizata qk astfel, ıncat variatia ei elementara dqk sa reprezinteo deplasare a sistemului, considerat ca un ıntreg, ıntr-o directie data u , adica sa reprezinte

10.4. SISTEME NATURALE 281
o translatie . Drept astfel de coordonata poate servi una din coordonatele carteziene alecentrului de masa. In aceasta situatie energia cinetica a sistemului nu va contine explicitcoordonata qk . Intr-adevar, deoarece conform Fig. 10.2 :
∂ri
∂qk
= limdqk→0
ri(qk + dqk)− ri(qk)
dqk
= limdqk→0
dqk · udqk
= u (10.112)
folosind si proprietatea (10.17), se verifica direct ca :
∂T
∂qk
=∂
∂qk
(1
2
N∑
i=1
mir2i
)=
N∑
i=1
miri∂ri
∂qk
=N∑
i=1
mirid
dt
(∂ri
∂qk
)=
N∑
i=1
miridu
dt= 0 (10.113)
undedu
dt= 0 , pentru ca u este versorul unei directii fixe.
Figura 10.2: Translatia sistemului ın lungul directiei u
Daca fortele efective aplicate sistemului deriva dintr-un potential obisnuit V = V (t, q) ,atunci ecuatia Lagrange corespunzatoare coordonatei qk devine :
d
dt
(∂L
∂qk
)=
∂L
∂qk
=∂T
∂qk
− ∂V
∂qk
= Qk (10.114)
adica :pk = Qk (10.115)
ceea ce exprima teorema impulsului , anume ca derivata dupa timp a proiectiei im-pulsului total al sistemului pe directia fixa de versor u, este egala cu componentape aceeasi directie a rezultantei fortelor aplicate . Intr-adevar, folosind si (10.16), re-zulta :
pk =∂L
∂qk
=∂T
∂qk
=∂
∂qk
(1
2
N∑
i=1
mir2i
)=
N∑
i=1
miri∂ri
∂qk
=N∑
i=1
miri∂ri
∂qk
=
(N∑
i=1
miri
)· u = p · u
(10.116)deci pk reprezinta proiectia impulsului total al sistemului pe directia u , iar pe de alta parte :
Qk =N∑
i=1
Fi∂ri
∂qk
=
(N∑
i=1
Fi
)· u = F · u (10.117)

282 CAPITOLUL 10. SISTEME OLONOME
adica Qk este componenta pe directia u a rezultantei fortelor care actioneaza asupra punctelorsistemului..
Daca coordonata qk este ciclica, adica daca∂L
∂qk
= − ∂V
∂qk
= 0 , atunci (10.115) devine :
pk = Qk = −∂V
∂qk
= 0 deci pk = const. (10.118)
rezultand astfel legea de conservare a impulsului , conform careia daca componenta peo directie data a rezultantei fortelor aplicate este nula, atunci proiectia pe aceeasi directie aimpulsului total este o constanta ın tot cursul miscarii.
Teorema momentului cinetic
Daca coordonata qk este aleasa astfel, ıncat variatia ei elementara dqk sa corespundaunei rotatii de ansamblu a sistemului ın jurul unei axe fixe de versor u , atunci ecuatiaLagrange corespunzatoare va exprima teorema momentului cinetic. Aceasta afirmatie poatefi verificata printr-un rationament analog cu cel din sectiunea anterioara, cu deosebirea caacum qk este o coordonata unghiulara.
Figura 10.3: Rotatia sistemului ın jurul axei de versor u
Variatia elementara a lui qk corespunde unei rotatii infinitezimale a vectorului ri care ısipastreaza lungimea, astfel ca (v. Fig. 10.3) :
|dri| = ri sin θ dqk adica
∣∣∣∣∣∂ri
∂qk
∣∣∣∣∣ = ri sin θ (10.119)
Deoarece vectorul∂ri
∂qk
este perpendicular pe planul definit de vectorii ri si u , va trebui ca :
∂ri
∂qk
= u× ri (10.120)
aceasta expresie luand loc formulei (10.112) ın toate calculele care urmeaza, calcule carepana la un anumit punct coincid cu cele precedente.

10.4. SISTEME NATURALE 283
Se verifica usor ca coordonata unghiulara qk nu este continuta explicit ın energia cinetica :
∂T
∂qk
=∂
∂qk
(1
2
N∑
i=1
mir2i
)=
N∑
i=1
miri∂ri
∂qk
=N∑
i=1
mirid
dt
(∂ri
∂qk
)=
=N∑
i=1
mirid
dt(u× ri) =
N∑
i=1
miri (u× ri) = 0 (10.121)
unde din nou s-a tinut cont de faptul ca u = 0 .Daca fortele aplicate deriva dintr-un potential obisnuit V = V (t, q) , ecuatia Lagrange
corespunzatoare coordonate qk ısi pastreaza forma generala pk = Qk, ınsa ea acum exprimateorema momentului cinetic , anume ca derivata dupa timp a proiectiei momentu-lui cinetic total al sistemului pe axa de rotatie de versor u, este egala cu momentulrezultant ın raport cu aceeasi axa al tuturor fortelor aplicate . Intr-adevar, reluandpartial calculele anterioare, rezulta :
pk =∂L
∂qk
=∂T
∂qk
=∂
∂qk
(1
2
N∑
i=1
mir2i
)=
N∑
i=1
miri∂ri
∂qk
=N∑
i=1
miri∂ri
∂qk
=
=N∑
i=1
miri (u× ri) =
(N∑
i=1
ri ×miri
)· u = L · u (10.122)
deci pk reprezinta proiectia momentului cinetic total pe axa de versor u , iar pe de alta parte :
Qk =N∑
i=1
Fi∂ri
∂qk
=N∑
i=1
Fi (u× ri) =
(N∑
i=1
ri × Fi
)· u = MO(F) · u (10.123)
adica Qk este momentul rezultant ın raport cu axa u al fortelor ce actioneaza asupra siste-mului.
Daca coordonata qk este ciclica atunci, ca si ın cazul anterior, se verifica direct ca Qk = 0 ,adica pk = const. , rezultand astfel legea de conservare a momentului cinetic ın raportcu axa de rotatie.
Coordonatele ciclice care descriu translatia sau rotatia joaca un rol deosebit ın studiulproprietatilor sistemelor mecanice. Astfel, daca coordonata care descrie translatia sistemuluieste ciclica, atunci deplasarea sistemului ca un ıntreg nu se reflecta asupra caracteristici-lor sale dinamice. Se poate atunci afirma ca daca sistemul este invariant ın raport cu otranslatie ın lungul unei directii date, atunci impulsul total ın directia respectiva se pastreazaconstant. Analog, daca coordonata care descrie rotatia sistemului ın jurul unei axe este ci-clica, ceea ce implica o valoare constanta a momentului cinetic al sistemului ın raport cu axa,sistemul va fi invariant ın raport cu o rotatie ın jurul axei respective. Este evident ca acesteproprietati nu exprima altceva decat proprietatile de omogenitate si izotropie ale spatiuluiın mecanica clasica.
Aceste teoreme de conservare sunt strans legate de proprietatile de simetrie ale sis-temelor mecanice. Astfel, daca de exemplu sistemul este caracterizat de o simetrie sferica,atunci se poate afirma direct ca ın anumite conditii toate cele trei componentele ale mo-mentului sau cinetic total vor ramane constante. Daca ınsa sistemul este simetric doar ınraport cu axa Oz , atunci se pastreaza constanta ın cursul miscarii doar componenta Lz amomentului cinetic.

284 CAPITOLUL 10. SISTEME OLONOME
Conservarea energiei
O alta lege de conservare care poate fi dedusa din structura lagrangeeanului este legeaconservarii energiei mecanice totale a unui sistem conservativ . Reamintim caun sistem conservativ este un sistem scleronom, asupra caruia actioneaza forte potentialestationare. Lagrangeeanul unui astfel de sistem nu va contine explicit timpul :
∂L
∂t= 0 adica L = L(q, q) (10.124)
el putand depinde de timp doar prin intermediul coordonatelor si vitezelor generalizate.Derivata totala a lagrangeeanului dupa timp va avea expresia :
dL
dt=
n∑
k=1
∂L
∂qk
qk +n∑
k=1
∂L
∂qk
qk =n∑
k=1
∂L
∂qk
dqk
dt+
n∑
k=1
[d
dt
(∂L
∂qk
)]qk =
d
dt
(n∑
k=1
∂L
∂qk
qk
)
(10.125)unde ın calcule s-a tinut cont de ecuatiile lui Lagrange. Rezultatul se mai poate pune subforma :
d
dt
(n∑
k=1
∂L
∂qk
qk − L
)= 0 (10.126)
adica :n∑
k=1
pkqk − L = h (10.127)
unde h este o constanta. Integrala prima obtinuta reprezinta chiar integrala energiei .
Intr-adevar, fortele fiind potentiale
(∂V
∂qk
= 0
)si sistemul scleronom (T = T2) :
pk =∂L
∂qk
=∂T
∂qk
=∂T2
∂qk
(10.128)
Conform teoremei lui Euler, energia cinetica fiind o functie omogena de ordinul doi ın vitezelegeneralizate, relatia (10.127) devine :
n∑
k=1
pkqk − L =n∑
k=1
∂T2
∂qk
qk − L = 2 T2 − L = 2 T − (T − V ) = T + V = h (10.129)
adica suma dintre energia cinetica si cea potentiala a sistemului este o constanta a miscarii.Acelasi rezultat a fost obtinut ın §10.3 printr-o metoda mult mai complicata.
Se observa ca daca timpul t este privit ca o ”coordonata”, asa-zisul ”impuls generalizat”asociat (marimea care se conserva cand t nu intervine explicit ın lagrangeean), reprezintachiar energia mecanica totala.
Teorema conservarii energiei dedusa mai sus difera oarecum de cea cunoscuta din meca-nica newtoniana. Se observa ca ın afara cerintei ca fortele sa admita un potential, se maiimpune suplimentar ca legaturile sa nu depinda explicit de timp (sistemul sa fie scleronom).In fond cele doua formulari nu reflecta ıntrutotul acelasi continut fizic, ele nereferindu-se launa si aceeasi energie. In formularea din dinamica, variatia energiei sistemului se definea prinlucrul mecanic al tuturor fortelor, inclusiv al reactiilor legaturilor. Insa ın formularea de mai

10.4. SISTEME NATURALE 285
Figura 10.4: O deplasare posibila daca legatura este nestationara
sus, energia V este definita doar de lucrul mecanic al fortelor efective, nefiind inclus si lucrulmecanic al reactiunilor. Pentru legaturi stationare, ıntre cele doua formulari nu exista nicio deosebire esentiala deoarece, dupa cum se stie, reactiile legaturilor stationare nu afecteazalucrul mecanic la deplasari virtuale sau posibile si de aceea potentialul lor este o marimeconstanta care poate fi inclusa ın constanta notata generic cu h . In schimb daca legaturaeste nestationara, reactia legaturii poate sa nu fie perpendiculara pe o deplasare posibila siatunci lucrul mecanic efectuat de o astfel de reactiune poate fi diferit de zero. Deoarecepotentialul unor astfel de reactiuni ale legaturilor se poate modifica ın timp, prezenta sa ınexpresia energiei totale a sistemului devine semnificativa.
Aplicatii
1. Peste un scripete fix de raza R si masa M este trecut un fir inextensibil de lungime L careare fixate la capete doua mase m1 si m2 . Masa m1 este legata de orizontala prin intermediul unuiresort vertical de constanta elastica k si lungime l ın stare nedeformata. Sa se studieze miscareasistemului. Cum se modifica rezultatele daca si masa m2 este legata de orizontala printr-un resortavand constanta elastica k′ si lungimea l′ ın stare nedeformata?
Rezolvare : Sistemul are un singur grad de libertate, ecuatiile legaturilor fiind :
x1 + x2 = 2h + πR− L
x1 = Rϕ(1)

286 CAPITOLUL 10. SISTEME OLONOME
Alegand drept coordonata generalizata pe
x1 ≡ x (2)
energia cinetica a sistemului are expresia :
T =1
2m1x
21 +
1
2m2x
22 +
1
2Iϕ2 =
1
2
(m1 + m2 +
1
2M
)x2 (3)
Cu exceptia unei constante care stabileste nivelul de zero, energia potentiala a sistemului va fi :
V =1
2k (l − x1)
2 +m1gx1 +m2gx2 =1
2k (l − x)2 +(m1 −m2) gx+m2g (2h + πR− L) (4)
Lagrangeeanul sistemului va avea astfel expresia :
L =1
2
(m1 + m2 +
1
2M
)x2 − 1
2k (l − x)2 − (m1 −m2) gx−m2g (2h + πR− L) (5)
Ecuatia Lagrange corespunzatoare va fi :
(m1 + m2 +
1
2M
)x− k (l − x) + (m1 −m2) g = 0 (6)
care se poate transcrie sub forma :
x +2k
2 (m1 + m2) + M
(x− l +
m1 −m2
kg)
= 0 (7)
Solutia generala a ecuatiei va fi :
x(t) = l − m1 −m2
kg + α cos (ω t + β) ; ω2 =
2k
2 (m1 + m2) + M(8)
unde α si β sunt constante care se determina din conditiile initiale. Miscarea corpului m1 va fioscilatorie cu perioada
T = 2π
√2 (m1 + m2) + M
2k(9)
ın jurul pozitiei de echilibru care are ordonata x01 = l − m1 −m2
kg .
Introducerea celui de al doilea resort care leaga masa m2 de orizontala nu modifica numarulgradelor de libertate, ın schimb se modifica energia potentiala, care fata de expresia (4) contineun termen suplimentar :
V = · · ·+ 1
2k′ (l′ − x2)
2= · · ·+ 1
2k′ [ l′ + x− (2h + πR− L)]
2(10)
Lagrangeeanul se va modifica ın mod corespunzator, iar ecuatia Lagrange devine ın final :
x +2 (k + k′)
2 (m1 + m2) + M
(x− kl + k′ (2h + πR− L− l′)
k + k′+
m1 −m2
k + k′g
)= 0 (11)

10.4. SISTEME NATURALE 287
Solutia ecuatiei se va scrie sub forma :
x(t) =kl + k′ (2h + πR− L− l′)
k + k′− m1 −m2
kg + α cos (ω t + β) (12)
unde acum :
ω2 =2 (k + k′)
2 (m1 + m2) + M(13)
Miscarea corpului m1 va fi oscilatorie cu perioada T = 2π
√√√√2 (m1 + m2) + M
2 (k + k′)ın jurul pozitiei
de echilibru care are ordonata x01 =
kl + k′ (2h + πR− L− l′)k + k′
− m1 −m2
kg .
2. Un punct material de masa m este legat ıntre doua resoarte avand constantele elastice k1 ,k2 si lungimile l1 , l2 ın stare nedeformata. Cunoscand ca extremitatile resoartelor sunt fixate la odistanta constanta d , sa se determine miscarea daca sistemul este plasat fie ın pozitie orizontala(se neglijeaza greutatea), fie ın pozitie verticala.
Rezolvare : In ambele situatii sistemul are un singur grad de libertate. Alegand axa Oxcoliniara cu sistemul, originea fiind la una din extremitati, energie cinetica va avea expresia :
T =1
2mx2 (1)
Energia potentiala va avea expresia generala (v. figura) :
V =1
2k1 (l1 − x)2 +
1
2k2 (x− d + l2)
2 − C ·mgx (2)
unde C = 0 ın cazul miscarii pe orizontala, cand forta de greutate nu poate efectua lucru mecanicsi C = 1 ın cazul miscarii pe verticala. Lagrangeeanul problemei va fi :
L =1
2mx2 − 1
2k1 (l1 − x)2 − 1
2k2 (x− d + l2)
2 + C ·mgx (3)

288 CAPITOLUL 10. SISTEME OLONOME
Ecuatia Lagrange corespunzatoare are forma :
mx + (k1 + k2) x− (k1l1 − k2l2 + k2d)− C ·mg = 0 (4)
deci :
x +k1 + k2
m
(x− k1l1 − k2l2 + k2d
k1 + k2
− Cmg
k1 + k2
)= 0 (5)
Solutia generala a ecuatiei este :
x(t) =k1l1 − k2l2 + k2d
k1 + k2
+ Cmg
k1 + k2
+ α cos (ω t + β) ; ω2 =k1 + k2
m(6)
Miscarea este oscilatorie cu perioada T = 2π
√m
k1 + k2
atat pe orizontala, cat si pe verticala,
ın jurul pozitiei de echilibru x0 =k1l1 − k2l2 + k2d
k1 + k2
+ Cmg
k1 + k2
, unde C = 0 pe orizontala si
C = 1 pe verticala.
3. Un resort de constanta elastica k , lungime l ın stare nedeformata si masa neglijabila, arefixate la cele doua extremitati masele m1 si m2 . Sistemul poate oscila liber atat pe orizontala,cat si pe verticala. Sa se studieze miscarea ın ambele situatii.
Rezolvare : Deoarece restrictia se refera doar la faptul ca sistemul se poate deplasa fie peorizontala, fie pe verticala, ın ambele situatii sistemul are doua grade de libertate. Alegand axaOx coliniara cu sistemul, energia cinetica va avea expresia :
T =1
2m1x
21 +
1
2m2x
22 (1)
Energia potentiala va avea forma generala :
V =1
2k [ l − (x2 − x1)]
2 − C (m1gx1 + m2gx2) (2)
unde C = 0 ın cazul miscarii pe orizontala, deoarece forta de greutate nu poate efectua lucrumecanic si C = 1 ın cazul miscarii pe verticala. Lagrangeeanul problemei va fi :
L =1
2m1x
21 +
1
2m2x
22 −
1
2k [ l − (x2 − x1)]
2 + C (m1gx1 + m2gx2) (3)
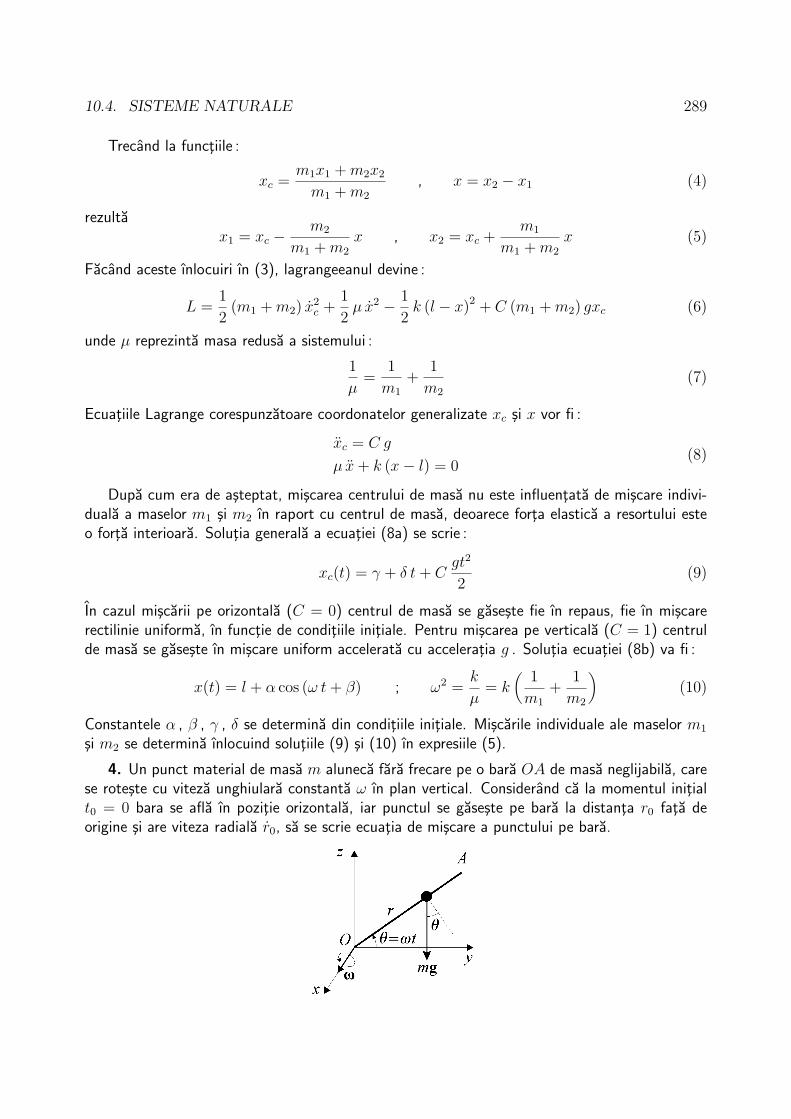
10.4. SISTEME NATURALE 289
Trecand la functiile :
xc =m1x1 + m2x2
m1 + m2
, x = x2 − x1 (4)
rezultax1 = xc − m2
m1 + m2
x , x2 = xc +m1
m1 + m2
x (5)
Facand aceste ınlocuiri ın (3), lagrangeeanul devine :
L =1
2(m1 + m2) x2
c +1
2µ x2 − 1
2k (l − x)2 + C (m1 + m2) gxc (6)
unde µ reprezinta masa redusa a sistemului :
1
µ=
1
m1
+1
m2
(7)
Ecuatiile Lagrange corespunzatoare coordonatelor generalizate xc si x vor fi :
xc = C g
µ x + k (x− l) = 0(8)
Dupa cum era de asteptat, miscarea centrului de masa nu este influentata de miscare indivi-duala a maselor m1 si m2 ın raport cu centrul de masa, deoarece forta elastica a resortului esteo forta interioara. Solutia generala a ecuatiei (8a) se scrie :
xc(t) = γ + δ t + Cgt2
2(9)
In cazul miscarii pe orizontala (C = 0) centrul de masa se gaseste fie ın repaus, fie ın miscarerectilinie uniforma, ın functie de conditiile initiale. Pentru miscarea pe verticala (C = 1) centrulde masa se gaseste ın miscare uniform accelerata cu acceleratia g . Solutia ecuatiei (8b) va fi :
x(t) = l + α cos (ω t + β) ; ω2 =k
µ= k
(1
m1
+1
m2
)(10)
Constantele α , β , γ , δ se determina din conditiile initiale. Miscarile individuale ale maselor m1
si m2 se determina ınlocuind solutiile (9) si (10) ın expresiile (5).
4. Un punct material de masa m aluneca fara frecare pe o bara OA de masa neglijabila, carese roteste cu viteza unghiulara constanta ω ın plan vertical. Considerand ca la momentul initialt0 = 0 bara se afla ın pozitie orizontala, iar punctul se gaseste pe bara la distanta r0 fata deorigine si are viteza radiala r0, sa se scrie ecuatia de miscare a punctului pe bara.

290 CAPITOLUL 10. SISTEME OLONOME
Rezolvare : Folosind coordonate polare ın planul yOz, energia cinetica a punctului de masam are expresia :
T =1
2m
(r2 + r2θ2
)=
1
2m
(r2 + r2ω2
)(1)
Energia potentiala va fi :V = mgz = mgr sin θ = mgr sin ωt (2)
unde conform enuntului θ(t) = ωt . Folosind lagrangeeanul :
L = T − V =1
2m
(r2 + r2ω2
)−mgr sin ωt (3)
ecuatia Lagrange radiala va avea forma :
r − ω2r = − g sin ωt (4)
si are solutia generala :
r(t) = C1eωt + C2 e−ωt +
g
2ω2sin ωt (5)
Impunand conditiile initiale, rezulta sistemul de ecuatii :
C1 + C2 = r0
ω(C1 − C2 +
g
2ω2
)= r0
(6)
care are solutia :
C1 =1
2
(r0 +
r0
ω− g
2ω2
)
C2 =1
2
(r0 − r0
ω+
g
2ω2
) (7)
Solutia ecuatiei radiale va fi :
r(t) =1
2
(r0 +
r0
ω− g
2ω2
)eωt +
1
2
(r0 − r0
ω+
g
2ω2
)e−ωt +
g
2ω2sin ωt (8)
Peste o componenta oscilatorie se suprapune o componenta transcendenta care ın timp devinedominanta.
5. O bara OA face unghiul α cu axa Oz si se roteste ın jurul acesteia cu viteza unghiularaconstanta ω . Un punct material de masa m , poate aluneca fara frecare ın lungul barei. Sa sestudieze miscarea sistemului daca se neglijeaza masa barei. Cum se modifica rezultatele dacacorpul m este legat de O prin intermediul unui resort de constanta elastica k , lungime l ın starenedeformata si masa neglijabila?

10.4. SISTEME NATURALE 291
Rezolvare : Alegand drept coordonata generalizata distanta r dintre O si corpul de masa m ,energia cinetica a corpului va fi :
T =1
2m
(r2 + r2ω2 sin2 α
)(1)
Energia potentiala va avea expresia :
V = mgz = mgr cos α (2)
Avand ın vederea expresia lagrangeeanului :
L =1
2m
(r2 + r2ω2 sin2 α
)−mgr cos α (3)
ecuatia Lagrange pentru coordonata r are forma :
r − ω2 sin2 α·r = − g cos α (4)
si are solutia generala :
r(t) = C1 ch (ω sin α·t) + C2 sh (ω sin α·t) +g cos α
ω2 sin2 α(5)
In cazul ın care corpul m este legat de O prin intermediul unui resort, aparent intervine doaro modificare minora, la energia potentiala urmand sa se adauge termenul pentru energia elasticade deformare :
V = · · ·+ 1
2k (r − l)2 (6)
lagrangeeanul sistemului modificandu-se corespunzator. Ecuatia de miscare devine :
mr −mω2 sin2 α·r + k (r − l) = −mg cos α (7)
adica :
r +
(k
m− ω2 sin2 α
)r =
k
ml − g cos α (8)
Interpretarea solutiei devine mult mai complexa. In functie de date problemei pot fi distinse treisituatii posibile :
a. cazulk
m> ω2 sin2 α : solutia ecuatiei (8) este oscilatorie si va avea forma generala :
r(t) = A cos
√k
m− ω2 sin2 α · t + β
+
k
ml − g cos α
k
m− ω2 sin2 α
(9)
b. cazulk
m= ω2 sin2 α : se obtine solutia simpla :
r(t) = r0 + r0 t +1
2
(k
ml − g cos α
)t2 (10)

292 CAPITOLUL 10. SISTEME OLONOME
c. cazulk
m< ω2 sin2 α : rezulta solutia transcendenta :
r(t) = C1 ch
√ω2 sin2 α− k
m· t
+ C2 sh
√ω2 sin2 α− k
m· t
−
k
ml − g cos α
ω2 sin2 α− k
m
(11)
Ultimele doua expresii ısi pastreaza valabilitatea atat timp cat deformarea resortului se mentineın domeniul elastic.
6. Un disc plan vertical de raza r si masa M se poate rostogoli fara sa alunece ın interiorulunui cilindru orizontal fix de raza R . Sa se studieze miscarea descrisa de centrul de masa aldiscului.
Rezolvare : In cursul miscarii centrul discului descrie un cerc de raza R− r , marimea vitezeisale fiind :
vc = (R− r) θ (1)
Deoarece miscarea discului ın interiorul cilidrului se realizeaza exclusiv prin rostogolire, vitezapunctului de contact P trebuie sa fie nula si ın consecinta :
vc = r ω (2)
Marimea vectorului rotatie va fi astfel :
ω =R− r
rθ (3)
Problema fiind cu un singur grad de libertate, se impune de la sine unghiul polar θ dreptcoodonata generalizata care precizeaza pozitia centrului discului la un moment dat. Energiacinetica a discului va fi :
T =1
2Mv2
c +1
2Iω2 =
1
2M (R− r)2 θ2 +
1
2I
(R− r)2
r2θ2 =
1
2M
(1 +
I
Mr2
)(R− r)2 θ2 (4)
Energia potentiala fiind :V = −Mgxc = −Mg (R− r) cos θ (5)
lagrangeeanul va avea expresia :
L =1
2M
(1 +
I
Mr2
)(R− r)2 θ2 + Mg (R− r) cos θ (6)

10.4. SISTEME NATURALE 293
Rezulta ecuatia de miscare :
(1 +
I
Mr2
)(R− r) θ + g sin θ = 0 (7)
adicaθ +
g
(R− r)(1 +
I
Mr2
) sin θ = 0 (8)
Se observa ca miscarea centrului de masa al discului este cea a unui pendul matematic avand
lungimea echivalenta l′ = (R− r)(1 +
I
Mr2
).
In aproximatia micilor oscilatii (sin θ ' θ) ecuatia de miscare devine :
θ + ω2θ = 0 , ω =
√√√√√g
(R− r)(1 +
I
Mr2
) (9)
si are solutia generala :θ(t) = α cos (ω t + β) (10)
Perioada miscarii oscilatorii va fi T =2π
ω. Pentru momentul de inertie al discului se va folosi
expresia cunoscuta I =1
2Mr2 .
7. Un pendul matematic de masa m si lungime l este legat de un perete prin intermediulunui resort orizontal avand constanta elastica k . Cunoscand ca punctul de fixare al resortului petija pendulului se gaseste la distanta a < l fata de punctul de suspensie, sa se calculeze expresiaperioadei micilor oscilatii ale sistemului.
Rezolvare : Energia cinetica a sistemului se reduce la cea a pendului :
T =1
2ml2θ2 (1)
Energia potentiala a sistemului se compune din energia elastica de deformare a resortului si energiapotentiala a pendului ın camp gravitational. Alegand axa Ox coliniara cu tija pendulului candsistemul este ın echilibru, elongatia resortului la orice moment va fi ∆y = a sin θ si atunci :
V =1
2k (∆y)2 + mg (l − x) =
1
2ka2 sin2 θ + mgl (1− cos θ) (2)

294 CAPITOLUL 10. SISTEME OLONOME
Lagrangeeanul exact al sistemului va avea expresia :
L = T − V =1
2ml2θ2 − 1
2ka2 sin2 θ −mgl (1− cos θ) (3)
In aproximatia micilor oscilatii sin θ ' θ , 1− cos θ ' θ2
2, lagrangeeanul devine :
L′ =1
2ml2θ2 − 1
2ka2θ2 −mgl
θ2
2=
1
2ml2θ2 − 1
2
(ka2 + mgl
)θ2 (4)
Ecuatia Lagrange are forma :ml2θ +
(ka2 + mgl
)θ = 0 (5)
adica :
θ + ω2θ = 0 , ω2 =k
m
(a
l
)2
+g
l(6)
Miscarea este oscilatorie θ(t) = α cos (ω t + β) cu perioada :
T =2π
ω=
2π√k
m
(a
l
)2
+g
l
(7)
8. Punctul de suspensie al unui pendul matematic de masa m si lungime l se poate deplasaorizontal dupa legea a sin ωt . Sa se determine miscarea pendulului ın aproximatia micilor oscilatii
daca ω 6=√
g
lsi a ¿ l .
Rezolvare : Folosind coordonate carteziene, pozitia si viteza pendulului vor fi date de expre-siile :
x = l cos θ
y = l sin θ + a sin ωt,
x = − lθ sin θ
y = lθ cos θ + aω cos ωt(1)
Lagrangeeanul exact va fi astfel :
L = T − V =1
2
(x2 + y2
)−mg (l − x) =
=1
2ml2θ2 + malωθ cos θ cos ωt +
1
2ma2ω2 cos2 ωt−mgl (1− cos θ)
(2)
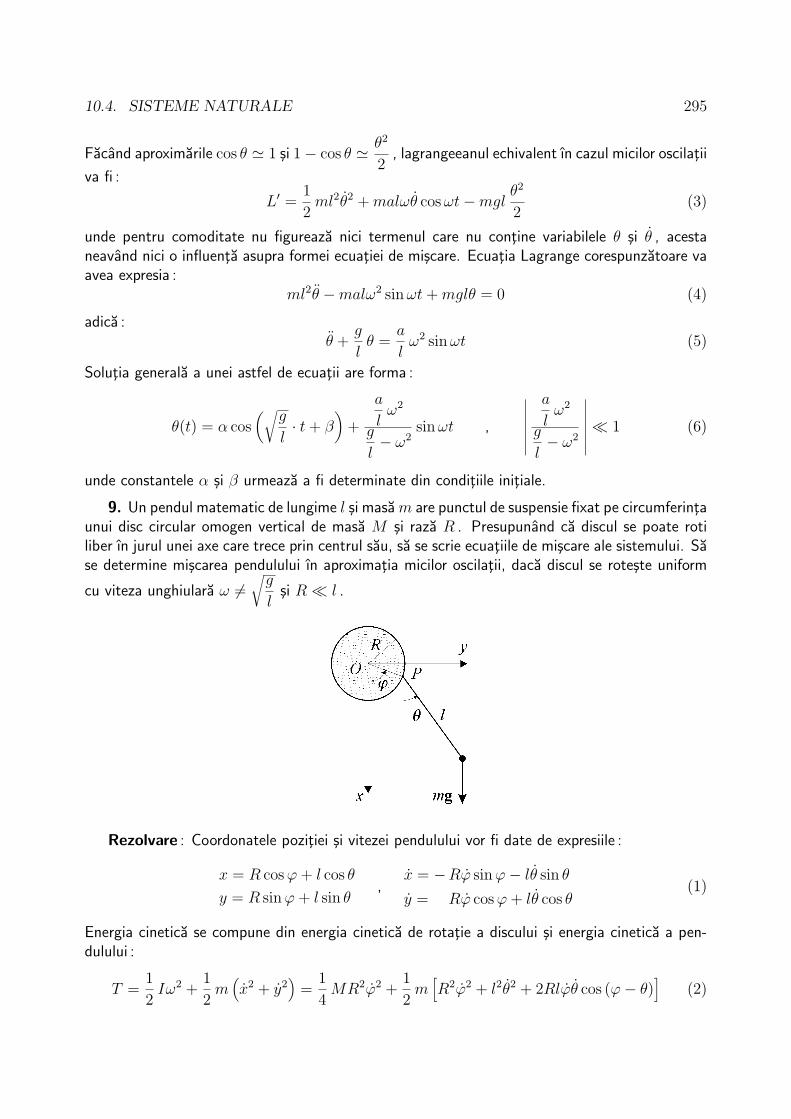
10.4. SISTEME NATURALE 295
Facand aproximarile cos θ ' 1 si 1− cos θ ' θ2
2, lagrangeeanul echivalent ın cazul micilor oscilatii
va fi :
L′ =1
2ml2θ2 + malωθ cos ωt−mgl
θ2
2(3)
unde pentru comoditate nu figureaza nici termenul care nu contine variabilele θ si θ , acestaneavand nici o influenta asupra formei ecuatiei de miscare. Ecuatia Lagrange corespunzatoare vaavea expresia :
ml2θ −malω2 sin ωt + mglθ = 0 (4)
adica :θ +
g
lθ =
a
lω2 sin ωt (5)
Solutia generala a unei astfel de ecuatii are forma :
θ(t) = α cos(√
g
l· t + β
)+
a
lω2
g
l− ω2
sin ωt ,
∣∣∣∣∣∣∣
a
lω2
g
l− ω2
∣∣∣∣∣∣∣¿ 1 (6)
unde constantele α si β urmeaza a fi determinate din conditiile initiale.
9. Un pendul matematic de lungime l si masa m are punctul de suspensie fixat pe circumferintaunui disc circular omogen vertical de masa M si raza R . Presupunand ca discul se poate rotiliber ın jurul unei axe care trece prin centrul sau, sa se scrie ecuatiile de miscare ale sistemului. Sase determine miscarea pendulului ın aproximatia micilor oscilatii, daca discul se roteste uniform
cu viteza unghiulara ω 6=√
g
lsi R ¿ l .
Rezolvare : Coordonatele pozitiei si vitezei pendulului vor fi date de expresiile :
x = R cos ϕ + l cos θ
y = R sin ϕ + l sin θ,
x = −Rϕ sin ϕ− lθ sin θ
y = Rϕ cos ϕ + lθ cos θ(1)
Energia cinetica se compune din energia cinetica de rotatie a discului si energia cinetica a pen-dulului :
T =1
2Iω2 +
1
2m
(x2 + y2
)=
1
4MR2ϕ2 +
1
2m
[R2ϕ2 + l2θ2 + 2Rlϕθ cos (ϕ− θ)
](2)

296 CAPITOLUL 10. SISTEME OLONOME
Energia potentiala va fi :
V = mgR (1− cos ϕ) + mgl (1− cos θ) (3)
Lagrangeeanul sistemului va avea expresia :
L =1
2
(m +
M
2
)R2ϕ2 +
1
2ml2θ2 + mRlϕθ cos (ϕ− θ)−mgR (1− cos ϕ)−mgl (1− cos θ)
(4)Ecuatiile de miscare corespunzatoare coordonatelor ϕ si θ vor fi de forma :
(m +
M
2
)Rϕ + mlθ cos (ϕ− θ) + mlθ2 sin (ϕ− θ) + mg sin ϕ = 0
Rϕ cos (ϕ− θ) + lθ − Rϕ2 sin (ϕ− θ) + g sin θ = 0(5)
In ipoteza ca discul se roteste cu viteza unghiulara constanta ϕ = ω , pentru a scrie ecuatia demiscare a pendulului ar trebui sa se rescrie lagrangeeanul, dar se poate ajunge la acelasi rezultatdaca se foloseste direct ecuatia (5b) ın care se fac ınlocuirile ϕ = ωt si ϕ = 0 :
θ +g
lsin θ =
R
lω2 sin (ωt− θ) (6)
In aproximatia micilor oscilatii facand ınlocuirile sin θ ' θ si θ ¿ ωt , rezulta ecuatia de miscare :
θ +g
lsin θ =
R
lω2 sin ωt (7)
Dupa cum era de asteptat, s-a obtinut o ecuatie identica ca forma cu cea din problema anterioara,solutia ei avand forma generala :
θ(t) = α cos(√
g
l· t + β
)+
R
lω2
g
l− ω2
sin ωt ,
∣∣∣∣∣∣∣∣
R
lω2
g
l− ω2
∣∣∣∣∣∣∣∣¿ 1 (8)
10. De un pendul matematic avand masa m1 si lungimea l1 este suspendat un al doileapendul matematic avand masa m2 si lungimea l2 , sistemul avand posibilitatea sa se miste doarın plan vertical (pendul matematic dublu). Sa se scrie ecuatiile de miscare ale sistemului sisa se determine solutia ın aproximatia micilor oscilatii. Sa se particularizeze rezultatele pentrum1 = m2 = m si l1 = l2 = l .

10.4. SISTEME NATURALE 297
Rezolvare : Sistemul are doua grade de libertate. Drept coordonate generalizate se alegunghiurile pe care le fac cele doua pendule fata de verticala. Se observa ca :
x1 = l1 cos ϕ1
y1 = l1 sin ϕ1
,x1 = − l1ϕ1 sin ϕ1
y1 = l1ϕ1 cos ϕ1
(1)
si similarx2 = l1 cos ϕ1 + l2 cos ϕ2
y2 = l1 sin ϕ1 + l2 sin ϕ2
,x2 = − l1ϕ1 sin ϕ1 − l2ϕ2 sin ϕ2
y2 = l1ϕ1 cos ϕ1 + l2ϕ2 cos ϕ2
(2)
Energiile cinetice vor avea expresiile :
T1 =1
2m1
(x2
1 + y21
)=
1
2m1l
21ϕ
21
T2 =1
2m2
(x2
2 + y22
)=
1
2m2
[l21ϕ
21 + l22ϕ
22 + 2l1l2ϕ1ϕ2 cos (ϕ1 − ϕ2)
] (3)
iar energiile potentiale vor fi :
V1 = m1gl1 (1− cos ϕ1)
V2 = m2gl1 (1− cos ϕ1) + m2gl2 (1− cos ϕ2)(4)
Lagrangeeanul sistemului are expresia :
L =1
2(m1 + m2) l21ϕ
21 +
1
2m2l
22ϕ
22 + m2l1l2ϕ1ϕ2 cos (ϕ1 − ϕ2) −
− (m1 + m2) gl1 (1− cos ϕ1)−m2gl2 (1− cos ϕ2)(5)
Ecuatiile de miscare corespunzatoare coordonatelor ϕ1 si ϕ2 vor fi :
(m1 + m2)l1ϕ1 + m2l2ϕ2 cos(ϕ1 − ϕ2) + m2l2ϕ22 sin(ϕ1 − ϕ2) + (m1 + m2)g sin ϕ1 = 0
l1ϕ1 cos(ϕ1 − ϕ2) + l2ϕ2 − l1ϕ21 sin(ϕ1 − ϕ2) + g sin ϕ2 = 0
(6)
Lagrangeeanul aproximativ ın cazul micilor oscilatii se obtine din (5) unde se fac ınlocuirile
cos (ϕ1 − ϕ2) ' 1 , 1− cos ϕ1 ' ϕ21
2si 1− cos ϕ2 ' ϕ2
2
2:
L′ =1
2(m1 + m2) l21ϕ
21 +
1
2m2l
22ϕ
22 + m2l1l2ϕ1ϕ2 − (m1 + m2) gl1
ϕ21
2−m2gl2
ϕ22
2(7)
ecuatiile de miscare capatand acum forma mai simpla :
(m1 + m2) l1ϕ1 + m2l2ϕ2 + (m1 + m2) gϕ1 = 0
l1ϕ1 + l2ϕ2 + gϕ2 = 0(8)
Se cauta o solutie a acestui sistem liniar sub forma :
ϕ1(t) = C1 e iωt ; ϕ2(t) = C2 e iωt (9)

298 CAPITOLUL 10. SISTEME OLONOME
Inlocuind ın (8) se obtin ecuatiile pentru constantele C1 si C2 :
(m1 + m2) (g − l1ω2) C1 − m2l2ω
2 C2 = 0
− l1ω2 C1 + (g − l2ω
2) C2 = 0(10)
Sistemul are solutie nebanala numai daca determinantul coeficientilor este nul :∣∣∣∣∣
(m1 + m2) (g − l1ω2) −m2l2ω
2
− l1ω2 g − l2ω
2
∣∣∣∣∣ = 0 (11)
Se obtine astfel ecuatia caracteristica :
m1l1l2 ω4 − (m1 + m2) (l1 + l2) g ω2 + (m1 + m2) g2 = 0 (12)
care furnizeaza valorile frecventelor proprii ale sistemului :
ω21,2 =
g
2m1l1l2
[(m1 + m2) (l1 + l2)∓
√m1 + m2
√m1 (l1 − l2)
2 + m2 (l1 + l2)2
](13)
Solutia generala a sistemului (8) va avea forma :
ϕ1(t) = <C1+
1 e iω1t + C1−1 e−ω1t + C2+
1 e iω2t + C2−1 e−ω2t
ϕ2(t) = <C1+
2 e iω1t + C1−2 e−ω1t + C2+
2 e iω2t + C2−2 e−ω2t
(14)
Observand ca :
C1±1 =
g − l2ω21
l1ω21
C1±2 ; C2±
1 =g − l2ω
22
l1ω22
C2±2 (15)
solutia (14) poate fi scrisa sub forma :
ϕ1(t) =g − l2ω
21
l1ω21
θ1(t) +g − l2ω
22
l1ω22
θ2(t)
ϕ2(t) = θ1(t) + θ2(t)
(16)
unde
θ1(t) = <C1+
2 e iω1t + C1−2 e−ω1t
= α1 cos (ω1t + β1)
θ2(t) = <C2+
2 e iω2t + C2−2 e−ω2t
= α2 cos (ω2t + β2)
(17)
reprezinta coordonatele normale ale sistemului. Constantele α1 , α2 , β1 , β2 urmeaza sa fiedeterminate din conditiile initiale.
In particular, daca m1 = m2 = m si l1 = l2 = l sistemul de ecuatii capata forma simpla :
2l ϕ1 + l ϕ2 + 2gϕ1 = 0
l ϕ1 + l ϕ2 + gϕ2 = 0(18)
pentru frecventele proprii rezultand expresiile :
ω21,2 =
(2∓
√2
) g
l(19)

10.4. SISTEME NATURALE 299
Solutia generala a sistemului (18) se va scrie :
ϕ1(t) =1√2
[ θ1(t)− θ2(t)]
ϕ2(t) = θ1(t) + θ2(t)(20)
11. Doua corpuri cu masele m1 si m2 sunt legate ıntre ele prin intermediul unui resort avandconstanta elastica k0 . La randul lor, corpurile sunt legate lateral cu ajutorul a doua resoarte, avandconstantele elastice k1 si k2 , de doua puncte fixe situate la acelasi nivel. Neglijand greutateasi frecarile, sa se studieze miscarea sistemului si sa se discute solutia pentru cazul particularm1 = m2 = m si k1 = k2 = k .
Rezolvare : Notand cu x1 si x2 valorile elongatiilor la un moment dat ın raport cu pozitiile
de echilibru si observand ca energia potentiala a resortului de cuplaj este V0 =1
2k0(x2 − x1)
2,
lagrangeeanul sistemului are forma :
L = T − V =1
2m1x
21 +
1
2m2x
22 −
1
2k1x
21 −
1
2k2x
22 −
1
2k0(x2 − x1)
2 (1)
Ecuatiile de miscare ale celor doua corpuri sunt :
m1x1 + k1x1 − k0(x2 − x1) = 0
m2x2 + k2x2 + k0(x2 − x1) = 0(2)
de unde rezulta :
x1 +k1 + k0
m1
x1 − k0
m1
x2 = 0
x2 − k0
m2
x1 +k2 + k0
m2
x2 = 0
(3)
Sistemul de ecuatii diferentiale admite o solutie analitica. Cautand pe x1(t) si x2(t) sub forma :
x1(t) = C1eiωt ; x2(t) = C2e
iωt (4)
ecuatiile pentru determinarea constantelor C1 si C2 vor fi :(
k1 + k0
m1
− ω2
)C1 − k0
m1
C2 = 0
− k0
m2
C1 +
(k2 + k0
m2
− ω2
)C2 = 0
(5)

300 CAPITOLUL 10. SISTEME OLONOME
Ecuatia caracteristica care furnizeaza valorile lui ω pentru care sistemul (5) are solutie nebanala,va avea forma : (
k1 + k0
m1
− ω2
) (k2 + k0
m2
− ω2
)− k2
0
m1m2
= 0 (6)
In cazul particular m1 = m2 = m si k1 = k2 = k , ecuatia (6) devine :
k + k0
m− ω2 = ± k0
m(7)
de unde rezulta frecventele proprii ale sistemului de oscilatori :
ω21 =
k
m; ω2
2 =k + 2k0
m(8)
Observand ca :C1±
1 = C1±2 ; C2±
1 = −C2±2 (9)
solutia generala a sistemului de ecuatii diferentiale (3) se scrie sub forma unei suprapuneri deoscilatii armonice simple :
x1(t) = θ1(t)− θ2(t) ; x2(t) = θ1(t) + θ2(t) (10)
unde θ1 si θ2 reprezinta oscilatiile (modurile) normale :
θ1(t) = <C1+
2 eiω1t + C1−2 e−iω1t
= α1 cos(ω1t + β1)
θ2(t) = <C2+
2 eiω2t + C2−2 e−iω2t
= α2 cos(ω2t + β2)
(11)
Cele patru constante de integrare α1 , α2 , β1 , β2 , sunt determinate de conditiile initiale prinrezolvarea urmatorului sistem de ecuatii neliniare :
x01 = α1 cos β1 − α2 cos β2
x02 = α1 cos β1 + α2 cos β2
x01 = −α1ω1 sin β1 + α2ω2 sin β2
x02 = −α1ω1 sin β1 − α2ω2 sin β2
(12)
Solutia analitica a acestui sistem este :
α1 =1
2
√(x0
1 + x02)
2+
1
ω21
(x01 + x0
2)2
α2 =1
2
√(x0
1 − x02)
2+
1
ω22
(x01 − x0
2)2
;
β1 = arctg
(− 1
ω1
x01 + x0
2
x01 + x0
2
)
β2 = arctg
(− 1
ω2
x01 − x0
2
x01 − x0
2
) (13)
Se observa ca ıntotdeauna pot fi alese conditii initiale astfel ıncat sistemul sa efectueze oscilatiicu una din frecventele proprii ω1 sau ω2 . Astfel, daca :
x01 = x0
2 si x01 = x0
2 = 0 (14)

10.4. SISTEME NATURALE 301
rezulta :α1 = x0
1 , α2 = 0 ; β1 = 0 , β2 = 0 ! (15)
deci :x1(t) = θ1(t) = x0
1 cos ω1t ; x2(t) = θ1(t) = x01 cos ω1t (16)
Pentru setul de conditii initiale :
x01 = − x0
2 si x01 = x0
2 = 0 (17)
rezulta :α1 = 0 , α2 = x0
2 ; β1 = 0 ! , β2 = 0 (18)
deci :x1(t) = − θ2(t) = −x0
2 cos ω2t ; x2(t) = θ2(t) = x02 cos ω2t (19)
In ambele situatii sistemul efectueaza oscilatii armonice simple si cele doua mase nu schimbaenergie ıntre ele ın cursul miscarii. Energia mecanica totala fiind constanta, energia castigata saupierduta va fi ınmagazinata ın resortul de cuplaj. Rezultate asemanatoare pot fi obtinute si pentruseturile de conditii initiale generalizate x0
1 = x02 6= 0 si x0
1 = x02 6= 0 , respectiv x0
1 = − x02 6= 0 si
x01 = − x0
2 6= 0 .Pentru orice alta alegere a conditiilor initiale, miscarile celor doua mase vor reprezenta niste
combinatii liniare ale oscilatiilor normale si ın cursul miscarii corpurile vor schimba energie ıntreele prin intermediul resortului de cuplaj avand constanta elastica k0 .
Daca frecventele ω1 si ω2 sunt comensurabile, atunci miscarea sistemului este periodica cu
perioada T =2π
ωc
, frecventele proprii fiind multiplii frecventei fundamentale ωc .
12. Un pendul matematic de lungime l si masa m este suspendat de un corp de masa M .Acesta se poate deplasa fara frecare pe o suprafata orizontala si este legat de un perete verticalprin intermediul unui resort orizontal avand constanta elastica k si masa neglijabila. Sa se scrieecuatiile de miscare ale sistemului si sa se particularizeze rezultatele ın aproximatia micilor oscilatii.Sa se determine solutia ın absenta resortului (k = 0).
Rezolvare : Alegand originea sistemului de referinta ın centrul de masa al corpului M candsistemul este ın echilibru si notand cu y alungirea la un moment dat a resortului, coordonatelepozitiei si vitezei pendului de masa m vor fi :
xm = l cos ϕ
ym = y + l sin ϕ,
xm = − lϕ sin ϕ
ym = y + lϕ cos ϕ(1)

302 CAPITOLUL 10. SISTEME OLONOME
Energia cinetica a sistemului va fi :
T =1
2My2 +
1
2m
(x2
m + y2m
)=
1
2(M + m) y2 +
1
2ml2ϕ2 + mlyϕ cos ϕ (2)
Energia potentiala se compune din energia elastica a resortului si energia potentiala a pendulului :
V =1
2ky2 + mg (l − xm) =
1
2ky2 + mgl (1− cos ϕ) (3)
Lagrangeeanul sistemului va avea expresia :
L = T − V =1
2(M + m) y2 +
1
2ml2ϕ2 + mlyϕ cos ϕ− 1
2ky2 −mgl (1− cos ϕ) (4)
iar ecuatiile exacte de miscare corespunzatoare coordonatelor y si ϕ vor avea forma :
(M + m) y + mlϕ cos ϕ−mlϕ2 sin ϕ + ky = 0
y cos ϕ + lϕ + g sin ϕ = 0(5)
In cazul micilor oscilatii se pot face aproximarile sin ϕ ' ϕ , cos ϕ ' 1 , 1− cos ϕ ' ϕ2
2si
lagrangeeanul devine :
L′ =1
2(M + m) y2 +
1
2ml2ϕ2 + mlyϕ− 1
2ky2 −mgl
ϕ2
2(6)
iar ecuatiile de miscare capata forma :
(M + m) y + mlϕ + ky = 0
y + lϕ + gϕ = 0(7)
Solutia generala a sistemului (7) poate fi exprimata folosind coordonatele normale care continfrecventele proprii ale sistemului. Cautand o solutie sub forma :
y(t) = C1 e iωt ; ϕ(t) = C2 e iωt (8)
prin ınlocuire ın (7) rezulta sistemul :
[(M + m) ω2 − k] C1 + mlω2 C2 = 0
ω2 C1 + (lω2 − g) C2 = 0(9)
care are solutie nebanala numai daca :∣∣∣∣∣
(M + m) ω2 − k mlω2
ω2 lω2 − g
∣∣∣∣∣ = 0 (10)
Se obtine astfel ecuatia caracteristica :
ω4 −[
k
M+
(1 +
m
M
)g
l
]ω2 +
k
M
g
l= 0 (11)

10.4. SISTEME NATURALE 303
care furnizeaza valorile frecventelor proprii :
ω21,2 =
1
2
[k
M+
(1 +
m
M
)g
l
]∓
√√√√(
k
M
)2
+(1 +
m
M
)2 (g
l
)2
− 2(1− m
M
)k
M
g
l
(12)
Obsevand ca :
C1±1 =
g − lω21
ω21
C1±2 ; C2±
1 =g − lω2
2
ω22
C2±2 (13)
solutia generala a sistemului (7) se scrie sub forma unei suprapuneri de oscilatii armonice simple :
y(t) =g − lω2
1
ω21
θ1(t) +g − lω2
2
ω22
θ2(t)
ϕ(t) = θ1(t) + θ2(t)
(14)
unde θ1 si θ2 reprezinta coordonatele (modurile) normale :
θ1(t) = <C1+
2 e iω1t + C1−2 e−ω1t
= α1 cos (ω1t + β1)
θ2(t) = <C2+
2 e iω2t + C2−2 e−ω2t
= α2 cos (ω2t + β2)
(15)
Constantele de integrare α1 , α2 , β1 , β2 urmeaza sa fie determinate din conditiile initiale.In absenta resortului (k = 0), sistemul de ecuatii (7) se reduce la :
(M + m) y + mlϕ = 0
y + lϕ + gϕ = 0(16)
Din prima ecuatie rezulta :
y +m
M + mlϕ = 0 (17)
care prin integrare de doua ori furnizeaza expresia :
y +m
M + mlϕ = γ t + δ (18)
Pe de alta parte, ınlocuind (17) ın (16b) se obtine ecuatia pentru functia ϕ :
ϕ + ω2ϕ = 0 , ω =
√(1 +
m
M
)g
l(19)
care are solutia :
ϕ(t) = α cos (ωt + β) (20)
Pentru miscarea corpului M se obtine ın final ecuatia :
y(t) = − m
M + mlα cos (ωt + β) + γ t + δ (21)

304 CAPITOLUL 10. SISTEME OLONOME
Daca la momentul initial t = 0 sistemul este scos din starea de echilibru ϕ = ϕ0 , y = ϕ = y = 0 ,
atunci α = ϕ0 , β = γ = 0 , δ =m
M + mlϕ0 si solutia problemei va fi :
y(t) =m
M + mlϕ0 (1− cos ωt)
ϕ(t) = ϕ0 cos ωt(22)
13. Un regulator centrifugal Watt consta din patru bare identice de lungime l si masaneglijabila, articulate ın forma de romb, punctul O fiind fix (v. figura). In punctele A si B suntplasate doua mase egale avand valoarea m1 , iar ın punctul C care poate culisa liber pe veticala,se gaseste masa m2 . Sa se studieze miscarea regulatorului, daca acesta se roteste cu vitezaunghiulara ω = ϕ ın jurul verticalei.
Rezolvare : Examinand figura, rezulta ca sistemul are doua grade de libertate. Se aleg dreptcoordonate generalizate unghiul facut de bara OA (sau OB) cu verticala si unghiul ϕ facut deplanul OAC (sau OBC) cu un plan vertical de referinta. Vitezele punctelor A , B , C vor fi datede expresiile :
v2A = v2
B = (lθ)2 + (l sin θ·ϕ)2 = l2(θ2 + ϕ2 sin2 θ
)
v2C = 4l2θ2 sin2 θ
(1)
Energia cinetica a sistemului va fi astfel :
T = 2· 12
m1v2A +
1
2m2v
2C =
(m1 + 2m2 sin2 θ
)l2θ2 + m1l
2ϕ2 sin2 θ (2)
Energia potentiala a sistemului va avea expresia :
V = 2m1gz1 + m2gz2 = 2 (m1 + m2) lg (1− cos θ) (3)
iar lagrangeeanul problemei va fi :
L = T − V =(m1 + 2m2 sin2 θ
)l2θ2 + m1l
2ϕ2 sin2 θ − 2 (m1 + m2) lg (1− cos θ) (4)
Ecuatiile Lagrange pentru coordonatele θ si ϕ au expresiile :
(m1 + 2m2 sin2 θ
)θ −
(m1ϕ
2 − 2m2θ2)
sin θ cos θ = − (m1 + m2)g
lsin θ
d
dt
(ϕ sin2 θ
)= 0
(5)

10.4. SISTEME NATURALE 305
Sistemul (5) admite doua integrale prime. Una dintre ele rezulta direct din ecuatia (5b) sireprezinta teorema ariilor :
ϕ sin2 θ = C (6)
unde C = ϕ0 sin2 θ0 . Cea de a doua va fi integrala energiei deoarece sistemul este conservativ :
(m1 + 2m2 sin2 θ) l2θ2 + m1l2ϕ2 sin2 θ + 2 (m1 + m2) lg (1− cos θ) = h (7)
valoarea lui h fiind de asemenea determinata de conditiile initiale. Eliminand pe ϕ din ecuatiile(6) si (7) rezulta :
θ2 =[ h− 2 (m1 + m2) lg + 2 (m1 + m2) lg cos θ ] sin2 θ −m1l
2C2
(m1 + 2m2 sin2 θ) l2 sin2 θ(8)
Trecand la functia :
u = cos θ ; 0 ≤ θ ≤ π
2, 0 ≤ u ≤ 1 (9)
ecuatia (8) devine :
u2 =P (u)
[m1 + 2m2 (1− u2)] l2(10)
unde s-au facut notatiile :
P (u) = (α + βu) (1− u2)− γ2
α = h− 2 (m1 + m2) lg
β = 2 (m1 + m2) lg
γ2 = m1l2C2
(11)
Se observa ca solutii de interes fizic exista doar pentru P (u) ≥ 0 . Deoarece P (−∞) > 0 siP (±1) < 0 , polinomul va avea ıntotdeauna un zero −∞ < u3 < −1 , caruia nu ıi corespunde ovaloare reala pentru θ .
In functie de conditiile initiale pot fi ıntalnite mai multe situatii :a) θ0 6= 0 deci P (u0) > 0 . In functie de valoarea lui P (0) exista doua posibilitati :
Pentru P (0) ≤ 0 rezulta u2 ≤ u ≤ u1 , deci θ1 ≤ θ ≤ θ2 si variatia lui θ va fi periodica (daca
P (0) = 0 atunci θ2 =π
2). Pentru P (0) > 0 exista un singur zero care prezinta interes fizic :
daca θ0 < 0 la ınceput θ scade de la θ0 la θ1 si apoi creste laπ
2, iar daca θ0 > 0 atunci θ variaza
monoton de la θ0 laπ
2, ın continuare sistemul mentinandu-se ın aceasta situatie limita.
b) θ0 = 0 deci P (u0) = 0 , valoarea u0 fiind un zero al polinomului P (u) . Exista treiposibilitati :

306 CAPITOLUL 10. SISTEME OLONOME
Daca u0 este un zero dublu, atunci ın tot cursul miscarii θ = θ0 . Daca P (0) ≤ 0 atunci pentruu0 = u2 rezulta u0 ≤ u ≤ u1 si deci θ1 ≤ θ ≤ θ0 , iar pentru u0 = u1 rezulta u2 ≤ u ≤ u0 sideci θ0 ≤ θ ≤ θ2 . In ambele cazuri θ variaza periodic, pentru P (0) = 0 limita superioara fiindπ
2. Daca P (0) > 0 atunci θ creste monoton de la θ0 la
π
2, sistemul ramanand ın continuare ın
aceasta situatie limita.
Capitolul 11
Sisteme neolonome
Un sistem este neolonom, daca cel putin una din legaturile cinematice impuse nu admiteun factor integrant, aceasta neputand fi adusa la o forma finita. Problema determinariimiscarii devine mult mai complexa si ın general solicita o tratare individuala. Desi metodabazata pe ecuatiile lui Appel este suficient de generala, ın cele ce urmeaza va fi prezen-tata din considerente metodologice doar metoda lui Lagrange care, desi mai greoaie, areavantajul ca nu implica introducerea unor concepte specifice.
11.1 Ecuatiile Lagrange pentru sisteme neolonome
Presupunem ca pe langa cele n1 legaturi finite si legaturi diferentiale intergabile, avandforma generala :
fj(t, r1, . . . , rN) = 0 ; j = 1, . . . , n1 (11.1)
sistemului ıi sunt impuse si un numar n2 de legaturi diferentiale neintegrabile, ın generalliniare ın deplasari :
N∑
i=1
Ali dri + Alt dt = 0 ; l = 1, . . . , n2 (11.2)
unde de obicei coeficientii sunt functii de timp si de coordonate.Folosind formulele de transformare :
ri = ri(t, q1, . . . , qn) ;i = 1, . . . , N
n = 3N − n1
(11.3)
se introduc coordonatele generalizate (q1, . . . , qn) astfel ıncat legaturile finite (11.1) sa fiesatisfacute identic. Se construieste astfel un spatiu al configuratiilor Λn ın care, datoritalegaturilor (11.2), nu toate coordonatele generalizate sunt independente. Pentru a transcrielegaturile cinematice (11.2) ın noul set de coordonate, se fac ınlocuirile cunoscute :
N∑
i=1
Ali
(n∑
k=1
∂ri
∂qk
dqk +∂ri
∂tdt
)+ Alt dt = 0 ; l = 1, . . . , n2 (11.4)
307

308 CAPITOLUL 11. SISTEME NEOLONOME
Intervertind ın (11.4) ordinea sumarilor si facand notatiile :
alk =N∑
i=1
Ali∂ri
∂qk
, alt =N∑
i=1
Ali∂ri
∂t+ Alt ;
l = 1, . . . , n2
k = 1, . . . , n(11.5)
se obtin ecuatiile care exprima legaturile diferentiale neintegrabile ın Λn :
n∑
k=1
alkdqk + altdt = 0 ; l = 1, . . . , n2 (11.6)
De aici rezulta ca o deplasare virtuala a sistemului ın Λn , va fi definita de ecuatiile :
n∑
k=1
alkδqk = 0 ; l = 1, . . . , n2 (11.7)
Pentru a obtine ecuatiile de miscare ale sistemului neolonom ın spatiul Λn , se pornestede la ecuatia generala a dinamicii, care ın coordonatele (q1, . . . , qn) are forma generala :
n∑
k=1
[d
dt
(∂T
∂qk
)− ∂T
∂qk
]−Qk
δqk = 0 (11.8)
Acum variatiile δqk ; k = 1, . . . , n nu mai sunt arbitrare, ıntre ele existand cele n2 relatiide tipul (11.7). Forma concreta a ecuatiilor de miscare rezulta folosind metoda multipli-catorilor lui Lagrange . Inmultind fiecare din ecuatiile (11.7) cu cate un multiplicatorλl ; l = 1, . . . , n2 si ınsumand toate ecuatiile obtinute, va rezulta identitatea :
n2∑
l=1
λl
n∑
k=1
alkδqk =n∑
k=1
( n2∑
l=1
λl alk
)δqk = 0 (11.9)
Scazand aceasta expresie din (11.8) se obtine ecuatia :
n∑
k=1
[d
dt
(∂T
∂qk
)− ∂T
∂qk
]−Qk −
n2∑
l=1
λl alk
δqk = 0 (11.10)
Deoarece din ecuatiile (11.7) care definesc deplasarea virtuala a sistemului, pot fi exprimateun numar de n2 variatii δqk ın functie de celelalte n − n2 variatii considerate arbitrare,se impun conditiile ca multiplicatorii λl ; l = 1, . . . , n2 sa fie determinati din ecuatiile carerezulta prin anularea coeficientilor celor n2 variatii dependente. In aceste conditii, restulcoeficientilor celor n−n2 variatii δqk care acum sunt arbitrare, trebuie sa se anuleze, pentruca suma ramasa sa fie nula. Se obtine ın final sistemul de ecuatii :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= Qk +n2∑
l=1
λl alk ; k = 1, . . . , n (11.11)
Acestea sunt ecuatiile Lagrange cu multiplicatori pentru sisteme neolonome , careımpreuna cu ecuatiile legaturilor :
n∑
k=1
alkqk + alt = 0 ; l = 1, . . . , n2 (11.12)

11.1. ECUATIILE LAGRANGE PENTRU SISTEME NEOLONOME 309
rezolva problema determinarii miscarii sistemului neolonom, deoarece numarul n + n2 alecuatiilor avute la dispozitie, este egal cu numarul necunoscutelor problemei qk ; k = 1, . . . , nsi λl ; l = 1, . . . , n2 .
Pentru a gasi sensul fizic al ultimului termen din membrul drept al ecuatiilor (11.11), sepoate face presupunerea ca sistemul este eliberat de legaturile neintegrabile impuse asupra sa,ın locul acestora urmand a fi aplicate niste forte exterioare suplimentare Q′
k ; k = 1, . . . , n ,aceasta facandu-se astfel ıncat sa nu fie modificata starea de miscare a sistemului. Acesteforte suplimentare reprezinta chiar reactiile legaturilor , deoarece ele obliga sistemul sa semiste ın conformitate cu restrictiile impuse. In prezenta acestor forte suplimentare, ecuatiilede miscare vor fi :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= Qk + Q′k ; k = 1, . . . , n (11.13)
Deoarece acestea coincid cu ecuatiile (11.11), rezulta ca fortele generalizate corespunzatoare
reactiilor legaturilor sunt Q′k =
n2∑
l=1
λl alk ; k = 1, . . . , n . Astfel, ın cazul studiului miscarii
sistemelor neolonome, legaturile nu sunt eliminate din ecuatiile de miscare, ele fiind obtinuteca o parte a solutiei.
Ecuatiile Lagrange cu multiplicatori (11.11) pot fi utilizate si pentru studiul miscarii sis-temelor olonome, aceasta deoarece orice legatura finita f(t, q1, . . . , qn) = 0 , poate fi scrisa
sub forma unei legaturi diferentiale din clasa considerata :n∑
k=1
∂f
∂qk
dqk +∂f
∂tdt = 0 . Pro-
cedeul este folosit ın situatiile ın care apare neconvenabil sa se reduca toate coordonatelesistemului numai la cele independente, sau atunci cand se doreste obtinerea directa si areactiilor legaturilor, stiut fiind faptul ca ecuatiile lui Lagrange de speta a doua (pentrusisteme olonome) nu contin explicit reactiile legaturilor.
In ceea ce priveste variatia energiei totale a unui sistem neolonom, formula poate fidedusa folosind aceeasi metoda ca cea descrisa ın sectiunea anterioara, obtinandu-se ın finalexpresia :
dE
dt=
n∑
k=1
Q∗k qk +
d
dt(T1 + 2T0)− ∂T
∂t+
∂V
∂t+
n2∑
l=1
λl
n∑
k=1
alkqk (11.14)
Daca sistemul este scleronom , atunci alt = 0 ; l = 1, . . . , n2 si din ecuatiile (11.12) pentru
legaturi rezulta :n∑
k=1
alkqk = 0 ; l = 1, . . . , n2 . Astfel, ultimul termen din (11.14) se anuleaza,
reobtinandu-se expresia derivatei E calculata pentru sisteme olonome.Concluziile deduse anterior privind variatia energiei mecanice totale a sistemelor olonome,
se pastreaza si ın cazul sistemelor neolonome scleronome. In particular, daca sistemulneolonom este conservativ (sistem scleronom, pentru care toate fortele sunt potentialestationare), energia sa totala E = T + V nu se modifica ın cursul miscarii . In acestcaz energia mecanica totala va fi o integrala prima a miscarii. Proprietatea se pastreaza dacaasupra sistemului actioneaza si forte giroscopice.

310 CAPITOLUL 11. SISTEME NEOLONOME
Aplicatii
1. Sa se studieze miscarea unui disc circular omogen de masa M si raza R care se rostogolestefara sa alunece pe un plan ınclinat de lungime l care face unghiul θ cu orizontala.
Rezolvare : Sistemul de referinta fix se alege astfel ıncat axa Ox sa fie ın lungul planuluiınclinat, iar axa Oz sa fie perpendiculara pe plan. Planul discului coincide cu planul xOz . Dreptcoordonate generalizate ale sistemului se aleg coodonata x(t) a centrului de masa a discului siunghiul ϕ(t) de rotatie proprie al discului ın jurul unei axe perpendiculare pe planul sau. Ecuatialegaturii trebuie sa exprime faptul ca viteza absoluta a punctului de contact P este nula (nu estepermisa alunecarea discului):
x−R ϕ = 0 (1)
Desi legatura este integrabila, problema se poate rezolva elegant ın coordonatele x si ϕ folosindecuatiile Lagrange cu multiplicatori, ın care pentru expresiile coeficientilor din ecuatia legaturii sefac ınlocuirile :
ax = 1 , aϕ = −R (2)
Energia cinetica a sistemului se compune din energia cinetica a miscarii centrului de masa sienergia cinetica de rotatie a discului ın jurul axei care trece prin centrul de masa :
T =1
2Mx2 +
1
2Iϕ2 =
1
2Mx2 +
1
4MR2ϕ2 (3)
unde momentul de inertie al discului ın raport cu axa de rotatie este :
I =∫
r2dm =∫
r2ρdσ = ρ
R∫
0
r2 ·2πrdr = 2πρR4
4=
1
2MR2 (4)
Energia potentiala a sistemului va fi evident :
V = −Mg (x− l) sin θ (5)
Pentru a scrie ecuatiile Lagrange cu multiplicatori vor trebui evaluate expresiile :
∂T
∂x= Mx ,
d
dt
(∂T
∂x
)= Mx , Qx = − ∂V
∂x= Mg sin θ , λ ax = λ
∂T
∂ϕ=
1
2MR2ϕ ,
d
dt
(∂T
∂ϕ
)=
1
2MR2ϕ , Qϕ = − ∂V
∂ϕ= 0 , λ aϕ = −λ R
(6)

11.1. ECUATIILE LAGRANGE PENTRU SISTEME NEOLONOME 311
Grupand rezultatele rezulta sistemul de ecuatii :
mx = Mg sin θ + λ
1
2MR2ϕ = −λR
(7)
Aceste doua ecuatii, ımpreuna cu ecuatia (1) a legaturii, formeaza un sistem de trei ecuatii pentrucele trei necunoscute x , ϕ , λ . Dupa calcule banale rezulta :
x =2
3g sin θ , ϕ =
2
3
g sin θ
R, λ = − 1
3Mg sin θ (8)
Miscarea sistemului se determina prin integrari succesive, tinandu-se cont de conditiile initiale1.Se observa ca datorita legaturii, acceleratia centrului de masa al discului care se rostogolestefara sa alunece pe planul ınclinat, este mai mica decat acceleratia pe care avea-o daca acesta
ar aluneca fara frecare ın lungul planului (= g sin θ). Din egalitatea x =dv
dt= v
dv
dx=
1
2
dv2
dxrezulta ca viteza finala a centrului de masa cand discul ajunge la baza planului ınclinat va fi
v =
√4
3gl sin θ , rezultat care putea fi obtinut si prin metode elementare.
2. Sa se studieze miscarea unei patine omogene de masa M si lungime l care poate alunecafara frecare pe un plan orizontal.
Rezolvare : Pozitia patinei la un moment dat este precizata de valorile a trei parametri :coordonatele carteziene xc si yc ale centrului de masa si unghiul θ facut de patina cu axa Ox .Deoarece ın cursul miscarii viteza centrului de masa va trebui sa fie coliniara cu axul patinei, vaexista legatura neolonoma :
tg θ·xc − yc = 0 (1)
In consecinta sistemul are doua grade de libertate. Energia sa cinetica va avea expresia :
T =1
2M
(x2
c + y2c
)+
1
2Iθ2 (2)
1 Sistemul mecanic fiind olonom si natural, ecuatia ın x se putea obtine direct din lagrangeeanul :
L = T − V =34
Mx2 + Mg (x− l) sin θ

312 CAPITOLUL 11. SISTEME NEOLONOME
Pentru orice deplasare virtuala compatibila cu legaturile va trebui ca :
Mxc δxc + Myc δyc + Iθ δθ = 0 (3)
unde s-a tinut cont de faptul ca lucrul mecanic al greutatii patinei este nul. Inmultind ecuatia lacare satisfac deplasarile virtuale
tg θ·δxc − δyc = 0 (4)
cu multiplicatorul λ si adunand rezultatul la ecuatia (3), rezulta ecuatiile Lagrange pentru sistemulneolonom considerat :
Mxc = −λ tg θ
Myc = λ
θ = 0
(5)
Aceste ecuatii, ımpreuna cu ecuatia (1) a legaturii, vor furniza functiile necunoscute xc , yc , θ ,precum si expresia multiplicatorului Lagrange λ . Din (5c) prin integrare rezulta :
θ(t) = α t + β (6)
unde α si β reprezinta constante de integrare determinate de conditiile initiale. Din eucatiile (5b)si (1) va rezulta :
λ = Myc = M(xc tg θ +
α xc
cos2 θ
)(7)
Inlocuind acest rezultat ın (1a) va rezulta ecuatia diferentiala :
xc + α xc tg (α t + β) = 0 (8)
si ın consecinta :xc = γ cos (α t + β) (9)
Integrand ınca odata, va rezulta ın final :
xc =γ
αsin (α t + β) + δ (10)
Folosind ecuatia legaturii, prin integrare rezulta :
yc = − γ
αcos (α t + β) + ε (11)
Aici constantele γ , δ , ε se determina din conditiile initiale. Multiplicatorul λ va avea expresia :
λ = Mαγ cos (α t + β) (12)
Se observa ca ın cursul miscarii centrul de masa al patinei descrie un cerc care are ecuatia :
(xc − δ)2 + (yc − ε)2 =γ2
α2(13)
Capitolul 12
Problema celor doua corpuri
Una din cele mai importante probleme ale mecanicii, care admite de obicei o solutie gene-rala completa, o reprezinta problema celor doua corpuri, adica studiul miscarii unui sis-tem compus din doua puncte materiale aflate ın interactiune reciproca (ın absentafortelor exterioare !). In pofida acestui enunt banal, se va vedea ca ın realitate problema estesuficient de generala, fiind posibila aparitia unor complicatii de calcul semnificative.
12.1 Masa redusa. Problema echivalenta
Problema determinarii miscarii celor doua corpuri poate fi simplificata considerabil, ob-servand ca miscarea sistemului poate fi descompusa ın doua miscari independente :cea a centrului de masa al sistemului si cea a miscarii celor doua puncte materialeın raport cu centrul lor de masa .
Cu notatiile P1(m1, r1) si P2(m2, r2) , unde r1 si r2 sunt vectorii de pozitie ai punctelor ınraport cu un reper inertial, deoarece sistemului nu ıi este impusa nici o legatura, el va aveasase grade de libertate , deci pozitia sa va putea fi precizata cu ajutorul a sase coordonategeneralizate independente. In calitate de astfel de coordonate pot fi alese cele trei coordonateale vectorului de pozitie ale centrului de masa rc si cele trei coordonate ale vectorului :
r = r2 − r1 (12.1)
care precizeaza pozitia relativa a celui de al doilea corp ın raport cu primul.Deoarece ıntre cele doua corpuri actioneaza doar forte de interactiune reciproca,
potentialul din care deriva aceste forte (egale si de sens contrar) depinde doar de distantarelativa dintre corpuri : V = V (| r2 − r1|) = V (| r |) . Lagrangeeanul problemei, ın setul decoordonate specificat, va avea forma generala :
L = T (rc, r)− V (| r |) (12.2)
Conform celei de a doua teoreme a lui Koenig, energia cinetica a sistemului se compune dinenergia cinetica a miscarii centrului de masa si energia cinetica a miscarii celor doua corpuriın raport cu centrul de masa :
T =1
2(m1 + m2) r
2c +
1
2
2∑
i=1
mir′ 2i (12.3)
313

314 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Figura 12.1: Problema celor doua corpuri
unde r′1 si r′2 reprezinta vectorii de pozitie ai celor doua puncte ın raport cu centrul de masa(v. Fig. 12.1). Acesti doi vectori nu sunt independenti, deoarece din definitia vectorului depozitie a centrului de masa rezulta ;
m1r′1 + m2r
′2 = 0 (12.4)
Folosind aceasta relatie, pentru vectorul pozitie relativa r pot fi deduse expresiile :
r = r2 − r1 = r′2 − r′1 = − m1 + m2
m2
r′1 =m1 + m2
m1
r′2 (12.5)
de unde rezulta :r′1 = − m2
m1 + m2
r , r′2 =m1
m1 + m2
r (12.6)
Derivand aceste expresii dupa timp si ınlocuind rezultatele ın (12.3), se obtine ın final pentrulagrangeeanul problemei expresia :
L =1
2(m1 + m2) r
2c +
1
2µ r2 − V (| r |) (12.7)
unde marimea :1
µ=
1
m1
+1
m2
adica µ =m1m2
m1 + m2
(12.8)
poarta numele de masa redusa a sistemului.Examinand expresia (12.7) a lagrangeeanului, se observa ca nu intervin explicit coordo-
natele vectorului de pozitie rc , ceea ce ınseamna ca impulsurile generalizate asociate acestorasunt constante ale miscarii. Cele trei integrale prime, scrise vectorial, conduc la proprietatea :
rc = r0c deci rc(t) = r0
c t + r0c (12.9)
ceea ce ınseamna ca centrul de masa al sistemului este fie ın repaus, fie ın miscare rectilinieuniforma, ın raport cu un sistem inertial de referinta, depinzand de conditiile initiale. Re-zultatul era de asteptat, deoarece asupra sistemului nu actioneaza forte exterioare, iar celeinterioare nu au nici o influenta asupra miscarii centrului de masa.

12.2. MISCAREA IN CAMP CENTRAL 315
Deoarece ecuatiile Lagrange corespunzatoare componentelor lui r nu vor contine compo-nentele vectorilor rc si rc , ele pot fi deduse formal pornind de la lagrangeeanul :
L′ =1
2µ r2 − V (| r |) (12.10)
Insa aceasta functie coincide cu lagrangeeanul unui punct material de masa µ , aflat ın miscareıntr-un camp de forte care deriva din potentialul V (| r |) , care este simetric ın raport origineaunui sistem de axe, vectorul de pozitie al punctului la un moment dat ın raport cu aceastaorigine fiind r .
In consecinta, problema determinarii miscarii celor doua corpuri ın raport cu centrulde masa, poate fi redusa ıntotdeauna la problema echivalenta a studiului miscarii uneiparticule de masa µ sub actiunea unei forte centrale a carei marime depinde numai dedistanta dintre particula si centrul de forte. Odata cunoscuta aceasta miscare r = r(t) ,folosind relatiile (12.6) pot fi determinate ecuatiile de miscare r′1 = r′1(t) si r′2 = r′2(t) alecelor doua puncte ın raport cu centrul de masa. Miscarile individuale ale celor doua corpuriın raport cu sistemul inertial Oxyz vor fi date de expresiile :
r1 = rc + r′1 = rc − m2
m1 + m2
r , r2 = rc + r′2 = rc +m1
m1 + m2
r (12.11)
12.2 Miscarea ın camp central
12.2.1 Ecuatiile miscarii
Se studiaza miscarea unei particule de masa m ıntr-un camp de forte caracterizat prinaceea ca energia potentiala depinde numai de distanta r la un punct fix, ın care se consideraplasat centrul de forte si care constituie originea sistemului de referinta. Intrucat V = V (r) ,forta care actioneaza asupra punctului este de tip central :
F = −∇V (r) = − dV
dr· rr
; F (r) = − dV
dr(12.12)
deoarece suportul fortei trece prin origine, iar |F | depinde numai de distanta r de la centrulde forte la punctul de masa m .
Dupa cum se stie, deoarece MO(F) = 0 , o proprietate importanta a miscarii unui punctın camp central este aceea ca momentul cinetic ın raport cu centrul de forte este constantın tot cursul de miscarii :
L = m (r× v) = m (r0 × v0) = L0 (12.13)
In plus, deoarece la orice moment r · L0 = 0 , miscarea este plana , vectorul de pozitier gasindu-se tot timpul ın planul determinat de vectorii r0 si v0 , plan perpendicular pevectorul constant L0 .
Problema are astfel doua grade de libertate, functia lui Lagrange ın coordonatelepolare r si θ avand expresia :
L =1
2m (r2 + r2θ2)− V (r) (12.14)

316 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Se observa ca coordonata θ este ciclica , ceea ce ınseamna ca impulsul generalizat cores-punzator ei este o integrala prima a ecuatiilor de miscare :
pθ =∂L
∂θ= mr2θ = const. (12.15)
In fond, se reobtine legea de conservare a momentului cinetic pentru sistemul consi-derat, constanta care figureaza ın (12.15) fiind chiar |L0 | ≡ L0 :
mr2θ = L0 (12.16)
Interpretarea geometrica a acestei integrale prime este evidenta, daca se are ın vedere expresia
vitezei areolare ın coordonate polare |Ω | = 1
2r2θ . Din (12.16) rezulta :
L0 = 2m |Ω | (12.17)
si miscarea punctului pe traiectorie se face cu viteza areolara constanta. Cu alte cuvinte,din conservarea momentului cinetic rezulta ca vectorul de pozitie al punctului materialdescrie arii egale ın timpuri egale (legea a doua a lui Kepler).
O alta integrala prima care poate fi scrisa direct este integrala energiei. Sistemul fiindconservativ, lagrangeeanul nu contine explicit timpul si ın consecinta energia mecanica totalaa sistemului se conserva ın cursul miscarii :
E =1
2m (r2 + r2θ2) + V (r) =
1
2m r2 +
L0 2
2mr2+ V (r) (12.18)
unde, folosind (12.16), s-a facut ınlocuirea θ =L0
mr2. Aceasta lege de conservare este de fapt
o consecinta a ecuatiei Lagrange radiale :
mr −mrθ2 +dV
dr= 0 (12.19)
care, facand aceeasi substitutie, se poate scrie si sub forma :
mr − L0 2
mr3+
dV
dr= 0 (12.20)
Inmultind aceasta ecuatie cu r , rezultatul poate fi scris sub forma unei diferentiale totaledupa timp :
d
dt
1
2m r2 +
L0 2
2mr2+ V
= 0 (12.21)
care integrata conduce la ecuatia (12.18). Reciproc, derivand (12.18) se obtine ecuatia demiscare (12.20).
Solutia completa a problemei miscarii particulei ın camp central, poate fi obtinuta formalpornind de la legile de conservare ale energiei si momentului cinetic. Din ecuatia (12.18)rezulta :
r =dr
dt= ±
√√√√ 2
m
[E − V (r)− L0 2
2mr2
](12.22)
12.2. MISCAREA IN CAMP CENTRAL 317
Separand variabilele si integrand, se va obtine :
t = t0 ±r(t)∫
r0
dr√√√√ 2
m
[E − V (r)− L0 2
2mr2
] (12.23)
unde r0 reprezinta valoarea lui r la momentul t = t0 . Efectuand aceasta integrala, poate fidedusa, cel putin ın principiu, functia r = r(t) .
Odata determinata aceasta functie, pornind de la ecuatia (12.16) scrisa sub forma :
dθ =L0
mr2(t)dt (12.24)
prin integrare va rezulta functia θ = θ(t) :
θ = θ0 +
t∫
t0
L0dt
mr2(t)(12.25)
unde θ0 reprezinta valoarea lui θ la momentul t = t0 .Pentru a obtine direct ecuatia propriu-zisa a traiectoriei r = r(θ) , fara a deduce ın preala-
bil ecuatiile parametice, se porneste de la observatia ca : dt =dr
±√√√√ 2
m
[E − V (r)− L0 2
2mr2
] .
Facand aceasta ınlocuire ın (12.25), se obtine ın final :
θ = θ0 ±r(t)∫
r0
L0
r2dr
√√√√2m
[E − V (r)− L0 2
2mr2
] (12.26)
care reprezinta ecuatia traiectoriei punctului material a carui miscare este studiata folo-sind coordonate polare.
Dupa cum era de asteptat, problema avand doua grade de libertate, solutia ei generala(12.23) si (12.25) depinde de patru constante de integrare : r0 , θ0 , E , L0 , ultimele douafiind legate de conditiile initiale r0 , θ0 , r0 , θ0 prin intermediul relatiilor (12.16) si (12.18).
Alegerea corespunzatoare a semnelor ın (12.23) si (12.26) este de asemenea determinatade conditiile initiale. De exemplu, semnul integralei din (12.23) este determinat de semnulderivatei r la momentul t = t0 . Pe de alta parte, observand din (12.16) ca functia θ(t) este
monotona (ın cursul miscarii semnul lui θ =L0
mr2nu se poate modifica), tot conditiile initiale
vor spune daca functia θ(t) este monoton crescatoare sau descrescatoare ın timp.Desi odata cu gasirea solutiei generale (12.23) si (12.25) problema este principial re-
zolvata, din punct de vedere practic situatia nu este atat de simpla, deoarece chiar pentruexpresii banale ale potentialului V (r) , integralele care urmeaza a fi evaluate nu conduc decat

318 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
foarte rar la expresii care contin functii elementare usor de interpretat calitativ. Astfel, pen-
tru V =k
rn, integralele se exprima prin functii elementare numai daca n = −2 , −1 , 1 , 2 ;
iar pentru n = −6 , −4 , 3 , 4 , 6 integralele respective se exprima prin functii eliptice. Deaceea ın majoritatea cazurilor se impune o tratare individuala a problemei. Cu toate acestea,folosind doar ecuatiile de miscare si legile de conservare, pot fi extrase o serie de concluziiasupra caracterului miscarii, fara a mai fi necesara gasirea solutiei exacte a problemei pentrudiferite forme particulare ale functiei V (r) .
12.2.2 Studiul traiectoriilor
O analiza calitativa a caracterului miscarii poate fi realizata obsevand ca ecuatia radiala(12.20), care contine doar coordonata polara r si derivatele sale, poate fi interpretata cao ecuatie care descrie miscarea unidimensionala a unui punct material de masa m asupracaruia actioneaza forta efectiva :
Feff = − dV
dr+
L0 2
mr3; Veff (r) = −
∫Feff dr = V (r) +
L0 2
2mr2(12.27)
Termenul suplimentar care apare este de natura centrifugala, deoarece avand ın vedere ex-presia (12.16) pentru L0 , rezulta :
L0 2
mr3= mrθ2 =
mv2θ
r(12.28)
Legea conservarii energiei (12.18) se va transcrie ın forma :
E =1
2mr2 + Veff (r) (12.29)
si deoarece r2 ≥ 0 , va trebui ca ıntotdeauna :
E ≥ Veff (r) = V (r) +L0 2
2mr2(12.30)
Aceasta conditie defineste domeniul de variatie al valorilor lui r ın functie de formapotentialului V (r) si de valorile energiei mecanice totale E . Semnul de egalitate este posibildoar atunci cand r = 0 , deci atunci cand r ısi schimba semnul, adica cand functia r(t)din crescatoare devine descrescatoare si invers (reamintim ca functia θ(t) este fie monotoncrescatoare, fie monoton descrecatoare, deoarece ıntotdeauna θ 6= 0).
Ca o ilustrare a acestei metode examinam graficul functiei Veff pentru cazul cand asupra
particulei actioneaza o forta atractiva de tip keplerian F (r) = − k
r2; k > 0 , care deriva
din potentialul V (r) = − k
r; k > 0 . In acest caz, potentialul efectiv corespunzator problemei
unidimensionale are expresia :
Veff (r) = − k
r+
L0 2
2mr2(12.31)
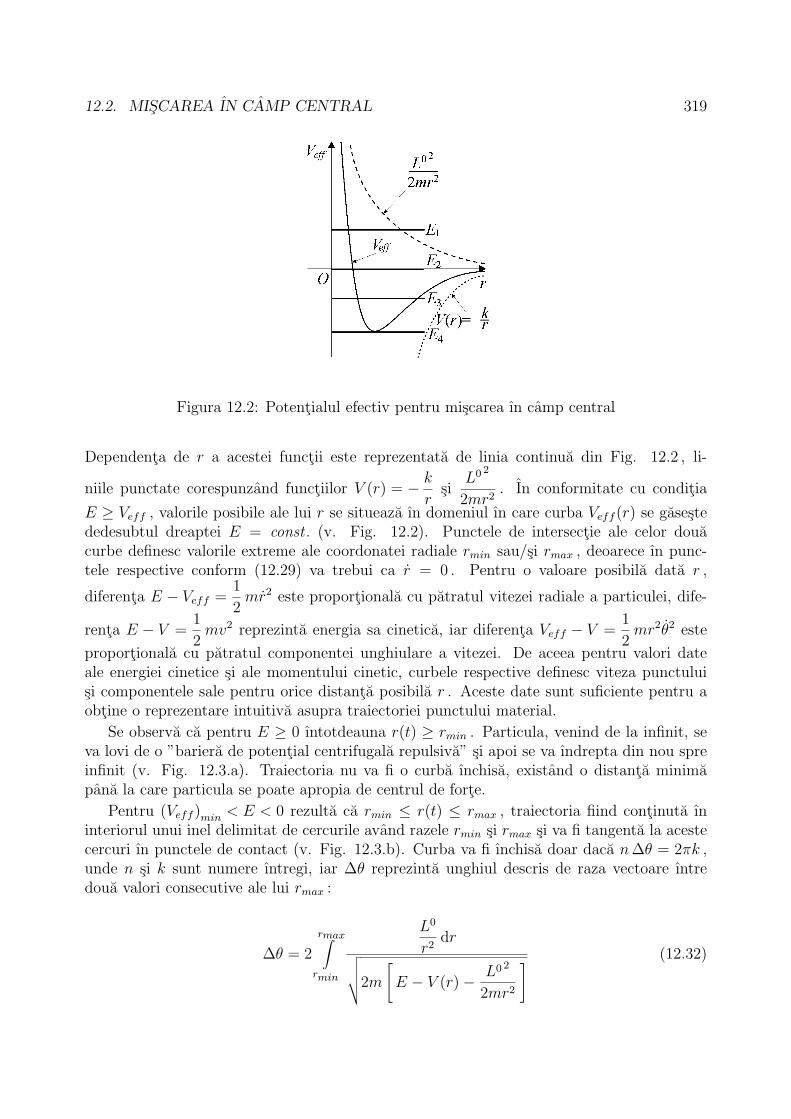
12.2. MISCAREA IN CAMP CENTRAL 319
Figura 12.2: Potentialul efectiv pentru miscarea ın camp central
Dependenta de r a acestei functii este reprezentata de linia continua din Fig. 12.2 , li-
niile punctate corespunzand functiilor V (r) = − k
rsi
L0 2
2mr2. In conformitate cu conditia
E ≥ Veff , valorile posibile ale lui r se situeaza ın domeniul ın care curba Veff (r) se gasestededesubtul dreaptei E = const . (v. Fig. 12.2). Punctele de intersectie ale celor douacurbe definesc valorile extreme ale coordonatei radiale rmin sau/si rmax , deoarece ın punc-tele respective conform (12.29) va trebui ca r = 0 . Pentru o valoare posibila data r ,
diferenta E − Veff =1
2mr2 este proportionala cu patratul vitezei radiale a particulei, dife-
renta E − V =1
2mv2 reprezinta energia sa cinetica, iar diferenta Veff − V =
1
2mr2θ2 este
proportionala cu patratul componentei unghiulare a vitezei. De aceea pentru valori dateale energiei cinetice si ale momentului cinetic, curbele respective definesc viteza punctuluisi componentele sale pentru orice distanta posibila r . Aceste date sunt suficiente pentru aobtine o reprezentare intuitiva asupra traiectoriei punctului material.
Se observa ca pentru E ≥ 0 ıntotdeauna r(t) ≥ rmin . Particula, venind de la infinit, seva lovi de o ”bariera de potential centrifugala repulsiva” si apoi se va ındrepta din nou spreinfinit (v. Fig. 12.3.a). Traiectoria nu va fi o curba ınchisa, existand o distanta minimapana la care particula se poate apropia de centrul de forte.
Pentru (Veff )min < E < 0 rezulta ca rmin ≤ r(t) ≤ rmax , traiectoria fiind continuta ıninteriorul unui inel delimitat de cercurile avand razele rmin si rmax si va fi tangenta la acestecercuri ın punctele de contact (v. Fig. 12.3.b). Curba va fi ınchisa doar daca n ∆θ = 2πk ,unde n si k sunt numere ıntregi, iar ∆θ reprezinta unghiul descris de raza vectoare ıntredoua valori consecutive ale lui rmax :
∆θ = 2
rmax∫
rmin
L0
r2dr
√√√√2m
[E − V (r)− L0 2
2mr2
] (12.32)
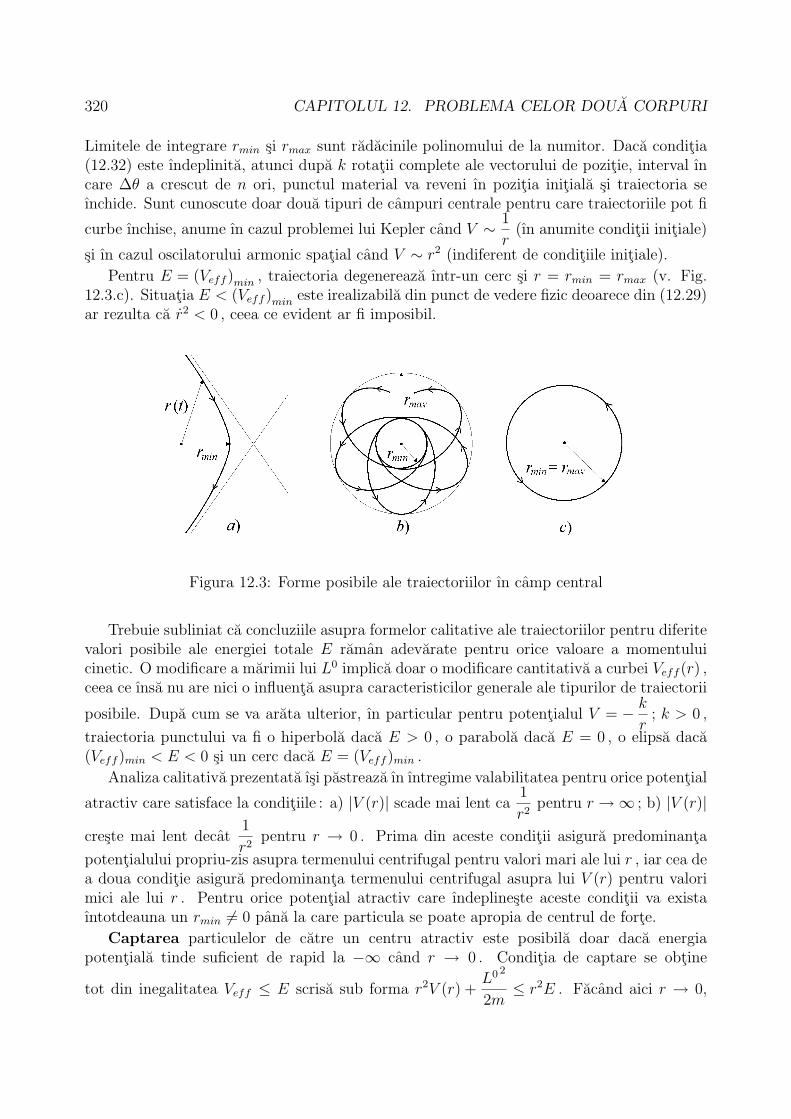
320 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Limitele de integrare rmin si rmax sunt radacinile polinomului de la numitor. Daca conditia(12.32) este ındeplinita, atunci dupa k rotatii complete ale vectorului de pozitie, interval ıncare ∆θ a crescut de n ori, punctul material va reveni ın pozitia initiala si traiectoria seınchide. Sunt cunoscute doar doua tipuri de campuri centrale pentru care traiectoriile pot fi
curbe ınchise, anume ın cazul problemei lui Kepler cand V ∼ 1
r(ın anumite conditii initiale)
si ın cazul oscilatorului armonic spatial cand V ∼ r2 (indiferent de conditiile initiale).
Pentru E = (Veff )min , traiectoria degenereaza ıntr-un cerc si r = rmin = rmax (v. Fig.12.3.c). Situatia E < (Veff )min este irealizabila din punct de vedere fizic deoarece din (12.29)ar rezulta ca r2 < 0 , ceea ce evident ar fi imposibil.
Figura 12.3: Forme posibile ale traiectoriilor ın camp central
Trebuie subliniat ca concluziile asupra formelor calitative ale traiectoriilor pentru diferitevalori posibile ale energiei totale E raman adevarate pentru orice valoare a momentuluicinetic. O modificare a marimii lui L0 implica doar o modificare cantitativa a curbei Veff (r) ,ceea ce ınsa nu are nici o influenta asupra caracteristicilor generale ale tipurilor de traiectorii
posibile. Dupa cum se va arata ulterior, ın particular pentru potentialul V = − k
r; k > 0 ,
traiectoria punctului va fi o hiperbola daca E > 0 , o parabola daca E = 0 , o elipsa daca(Veff )min < E < 0 si un cerc daca E = (Veff )min .
Analiza calitativa prezentata ısi pastreaza ın ıntregime valabilitatea pentru orice potential
atractiv care satisface la conditiile : a) |V (r)| scade mai lent ca1
r2pentru r →∞ ; b) |V (r)|
creste mai lent decat1
r2pentru r → 0 . Prima din aceste conditii asigura predominanta
potentialului propriu-zis asupra termenului centrifugal pentru valori mari ale lui r , iar cea dea doua conditie asigura predominanta termenului centrifugal asupra lui V (r) pentru valorimici ale lui r . Pentru orice potential atractiv care ındeplineste aceste conditii va existaıntotdeauna un rmin 6= 0 pana la care particula se poate apropia de centrul de forte.
Captarea particulelor de catre un centru atractiv este posibila doar daca energiapotentiala tinde suficient de rapid la −∞ cand r → 0 . Conditia de captare se obtine
tot din inegalitatea Veff ≤ E scrisa sub forma r2V (r) +L0 2
2m≤ r2E . Facand aici r → 0,

12.2. MISCAREA IN CAMP CENTRAL 321
conditia este ındeplinita daca
limr→0
[r2V (r)
]+
L0 2
2m≤ 0 (12.33)
Pentru un potential avand forma generala V (r) = − k
rn; k > 0 captarea va fi posibila pentru :
n = 2 , k ≥ L0 2
2mn > 2 , k > 0
(12.34)
Refacand rationamentul pentru un potential repulsiv de forma V (r) =k
r; k > 0 , se
observa ca indiferent de valoarea lui r ıntotdeauna E ≥ Veff > 0 . In consecinta va exista unsingur punct de intersectie al curbei Veff (r) cu dreapta E = const . (> 0) si deci ıntotdeaunar(t) ≥ rmin . Venind de la infinit, particula se apropie pana la o distanta minima de centrulrepulsiv de forte, ındepartandu-se apoi din nou spre infinit.
Figura 12.4: Construirea unei traiectorii cu doua distante apsidale
Punctele de pe traiectorie pentru care r atinge o valoare extrema poarta numele deabside , iar razele vectoare corespunzatoare se numesc raze apsidale . Traiectoria esteıntotdeauna simetrica fata de o raza apsidala. Demonstratia este evidenta daca se observaca ın punctele apsidale, unde r = 0 , radicalul care figureaza ın expresiile (12.22), (12.23) si(12.26) ısi schimba semnul. Alegand conditiile initiale astfel ca momentul t0 sa corespundatrecerii punctului material printr-o apsida si luand θ0 = 0, din (12.26) rezulta ca pentruvalori identice ale lui r , segmentele de traiectorie aflate de o parte si de alta a apsidei vordiferi doar prin semnul lui θ . Aceasta ınseamna ca traiectoria este simetrica fata de razaapsidala. Dupa cum s-a vazut, orice traiectorie ın camp central are cel mult doua distanteapsidale rmin si rmax . In cazurile ın care r(t) ≥ rmin , cele doua ramuri ale traiectoriei vor fiperfect simetrice ın raport cu rmin . Daca ınsa rmin ≤ r(t) ≤ rmax , cunoscand portiunea detraiectorie dintre doua apside consecutive, poate fi trasata ıntreaga traiectorie prin constructiigeometrice elementare (v. Fig. 12.4). Astfel, daca se cunoaste traiectoria A1A2 , deoareceOA2 este o axa de simetrie pentru traiectorie, poate fi construita portiunea de traiectorie

322 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
A2A3 , unde A3 este simetricul lui A1 fata de OA2 si deci tot o apsida. In continuare seconstruieste portiunea de traiectorie A3A4 , care este simetrica portiunii A2A3 ın raport cuOA3 , s.a.m.d.
Rezumand cele expuse, miscarea punctului material ıntr-un camp central este caracteri-zata prin urmatoarele proprietati generale :
- miscarea are loc ıntr-un plan fix care trece prin centrul de forte ;
- raza vectoare a punctului descrie arii egale ın unitati de timp egale ;
- unghiul polar θ este o functie monotona de timp ;
- traiectoria este simetrica ın raport cu razele apsidale.
12.2.3 Ecuatia lui Binet
In ceea ce priveste ecuatia diferentiala a traiectoriei, ea poate fi obtinuta din ecuatiagenerala de miscare (12.20) :
mr − L0 2
mr3= − dV
dr, F (r) = − dV
dr(12.35)
eliminand timpul cu ajutorul relatiei (12.16). Intrucat :
r =dr
dt= θ
dr
dθ=
L0
mr2
dr
dθ= − L0
m
d
dθ
(1
r
)
r =dr
dt= θ
dr
dθ= − L0 2
m2r2
d2
dθ2
(1
r
) (12.36)
ecuatia (12.35) devine :d2
dθ2
(1
r
)+
1
r=
mr2
L0 2
dV
dr(12.37)
care este cunoscuta sub numele de ecuatia lui Binet . Solutia generala r = r(θ) a acesteiecuatii diferentiale de ordinul doi depinde, ın afara de constanta L0 , de ınca doua constantede integrare :
1
r= f(θ, L0, C1, C2) (12.38)
Constantele L0 , C1 , C2 sunt determinate ın ıntregime de conditiile initiale. Astfel, dacala momentul initial t = t0 , vectorul de pozitie r0 face unghiul θ0 cu o directie fixa de referinta,iar viteza initiala v0 face unghiul α cu directia razei polare (v. Fig. 12.5), componentelevitezei punctului la momentul respectiv sunt :
r0 = v0 cos α
r0θ0 = v0 sin α(12.39)
Conform definitiei (12.16), constanta L0 va avea valoarea :
L0 = mr20 θ0 = mr0 · r0θ0 = mr0v0 sin α (12.40)

12.3. MISCAREA KEPLERIANA 323
Figura 12.5: Conditiile initiale ale problemei
iar constantele C1 si C2 rezulta din sistemul de ecuatii :
1
r0
= f(θ0, L0, C1, C2) ;
(− r
r2
)
0=
L0
mr20
(∂f
∂θ
)
0
(12.41)
Dupa cum s-a aratat ın §12.2.1, cunoscand potentialul V (r) din care deriva forta, solutiaecuatiei (12.37) poate fi obtinuta indirect si prin cuadraturi, ea avand forma explicita (12.26).
12.3 Miscarea kepleriana
Se studiaza miscarea unei particule de masa m ıntr-un camp atractiv cu simetrie cen-trala, avand forma :
V (r) = − k
r, F (r) = − k
r2; k > 0 (12.42)
centrul de forte gasindu-se ın originea sistemului de coordonate. Exemplul tipic ıl consti-tuie campul gravitational al Pamantului , pentru care k = fmM , unde M este masaPamantului, m este masa corpului atras, iar f este constanta atractiei universale. O problemasimilara este cea a miscarii unei planete ın jurul Soarelui, M reprezentand masa Soarelui, iarm masa planetei. In ambele situatii, ecuatiile de miscare ale problemei echivalente ar trebui
sa contina masa redusa1
µ=
1
m+
1
M, ınsa deoarece ın majoritatea cazurilor M À m , se
poate considera ın buna aproximatie ca µ ≈ m , iar centrul de masa al sistemului va coincidepractic cu centrul masei M , care poate fi ales ca origine a sistemului inertial fata de careeste raportata miscarea. Studiul interactiunii coulombiene dintre doua sarcini Z1e si Z2eavand semne diferite, se ıncadreaza ın aceeasi clasa de probleme, caz ın care k = −Z1Z2e
2 .Metoda cea mai simpla de obtinere a ecuatiei traiectoriei r = r(θ) consta ın determinarea
solutiei ecuatiei lui Binet (12.37), ın care se face ınlocuireadV
dr=
k
r2:
d2
dθ2
(1
r
)+
1
r=
km
L0 2 (12.43)
Solutia generala a acestei ecuatii diferentiale de ordinul doi este :
1
r= C1 cos(θ − θ1) +
km
L0 2 (12.44)

324 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
unde C1 si θ1 sunt constante de integrare care pot fi determinate din conditiile initiale.Efectuand notatiile :
p =L0 2
km, C1 =
e
p(12.45)
ecuatia traiectoriei (12.44) capata forma :
r =p
1 + e cos(θ − θ1)(12.46)
care reprezinta ecuatia unei conice ın coordonate polare, avand focarul ın origineasistemului de coordonate (care coincide cu centrul de forte). Aici p reprezinta parame-trul conicei, iar e este excentricitatea conicei, adica raportul dintre distanta de la centrulconicei la unul din focare si semiaxa mare. In functie de valoarea excentricitatii, conica poatefi o hiperbola (e > 1) , o parabola (e = 1) , o elipsa (0 < e < 1) , care poate degenera ıntr-un
cerc (e = 0) . O relatie foarte utila ın aplicatii este p = a(1− e2
)= ± b2
a, unde semnul (+)
corespunde elipsei, iar semnul (−) hiperbolei.Impunand conditiile initiale obisnuite, pot fi determinate usor constantele de integrare e
si θ1 . Pentru ınceput va fi evaluat parametrul conicei :
p =L0 2
km=
mr20v
20 sin2 α
k(12.47)
In continuare, scriind (12.46) sub forma1
r=
1
p[ 1 + e cos(θ − θ1) ] si facand t = t0 , rezulta :
1
r0
=1
p[ 1 + e cos(θ0 − θ1) ] (12.48)
adica :e cos(θ0 − θ1) =
p
r0
− 1 (12.49)
Derivand aceeasi expresie dupa timp :
r
r2θ=
e
psin(θ − θ1) (12.50)
facand din nou t = t0 si tinand cont de (12.39), rezulta :
v0 cos α
r0v0 sin α=
e
psin(θ0 − θ1) (12.51)
adica :e sin(θ0 − θ1) =
p
r0
cos α
sin α(12.52)
Ridicand la patrat (12.49) si (12.52) si adunand rezultatele, se obtine :
e2 =(
p
r0
− 1)2
+p2
r20
cos2 α
sin2 α= 1−2
p
r0
+p2
r20
(1 +
cos2 α
sin2 α
)= 1+2
p
r0
(p
2r0 sin2 α− 1
)(12.53)

12.3. MISCAREA KEPLERIANA 325
de unde, folosind (12.47), rezulta :
e2 = 1 + 2L0 2
kmr0
(mr0v
20
2k− 1
)(12.54)
Deoarece, pornind de la conservarea energiei mecanice totale a particulei, se poate scrie :
1
2mv2
0 = E − V = E +k
r0
(12.55)
expresia excentricitatii (12.54) poate fi pusa si sub forma :
e2 = 1 + 2L0 2
kmr0
[r0
k
(E +
k
r0
)− 1
]= 1 +
2EL0 2
mk2(12.56)
Constanta θ1 se determina facand raportul relatiilor (12.52) si (12.49) :
tg (θ0 − θ1) =p
p− r0
cos α
sin α=
L0 2
L0 2 − kmr0
cos α
sin α=
r0v20 sin α cos α
r0v20 sin2 α− k
m
(12.57)
Daca conditiile initiale sunt astfel alese, ıncat la momentul t = t0 punctul se gaseste la
distanta minima fata de centrul atractiv, atunci α = ± π
2si daca unghiul θ este masurat de
la aceasta raza, atunci θ0 = θ1 = 0 1.
1 Ecuatia (12.46) a traiectoriei poate fi obtinuta si direct, efectuand ınlocuirea V (r) = − k
rın solutia
generala (12.26):
θ − θ0 =
r∫
r0
L0
r2dr
√2mE +
2mk
r− L0 2
r2
Facand schimbarea de variabila u =1r
, du = − 1r2
dr rezulta integrala :
θ − θ0 = −u∫
u0
du√2mE
L0 2 +2mk
L0 2 u− u2
Folosind formula∫
dx√ax2 + bx + c
= − 1√− aarcsin
2ax + b√b2 − 4ac
+ C pentru a < 0 si b2−4ac > 0 , se obtine :
θ − θ2 = arcsin−u +
mk
L0 2√m2k2
L0 4 +2mE
L0 2
unde constanta θ2 contine pe θ0 si termenul constant din integrala. Facand schimbarea θ2 = θ1 +π
2rezultatul

326 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Avand ın vedere expresiile (12.54) si (12.56) pentru excentricitate, traiectoriile posibile
ale punctului material ın campul atractiv V (r) = − k
rvor fi determinate de conditiile initiale
dupa cum urmeaza :
- hiperbola (e > 1) daca E > 0 sau r0v20 >
2k
m
- parabola (e = 1) daca E = 0 sau r0v20 =
2k
m
- elipsa (0 < e < 1) daca − mk2
2L0 2 < E < 0 sauk
m< r0v
20 <
2k
m
- cerc (e = 0) daca E = − mk2
2L0 2 sau r0v20 =
k
m
(12.58)
Rezultatele sunt ın concordanta cu studiul calitativ efectuat ın §12.2.2 care era bazat pediagrama energetica a potentialului efectiv unidimensional Veff (r) . Doar ultima conditieare o forma putin modificata fata de cea cunoscuta E = (Veff )min pentru orbita circulara.
Ne putem convinge usor ca cele doua forme sunt echivalente. Intr-adevar, ın cazul orbiteicirculare r = r0 = const. si :
(Veff )min = − k
r0
+L0 2
2mr20
(12.59)
Raza r0 se obtine din conditia ca derivatadVeff
drsa se anuleze ın r0 :
dVeff
dr
∣∣∣∣∣r=r0
=k
r20
− L0 2
mr30
= 0 deci r0 =L0 2
mk(12.60)
Introducand acest rezultat ın (12.59) se obtine (Veff )min = − mk2
2L0 2 si conditia (12.58d) este
justificata ın ıntregime.
12.3.1 Miscarea pe o traiectorie eliptica. Legile lui Kepler
In cele ce urmeaza vor fi studiate mai amanuntit proprietatile miscarii pe traiectoriaeliptica, acestea prezentand un interes deosebit si din punct de vedere istoric, ıntrucat elesunt sintetizate ın legile lui Kepler .
devine :
u =mk
L0 2 +
√m2k2
L0 4 +2mE
L0 2 cos(θ − θ1)
adica :
r =
L0 2
km
1 +
√1 +
2EL0 2
mk2cos(θ − θ1)
Desi calculele sunt mult mai complicate decat ın cazul obtinerii nemijlocite a solutiei ecuatiei lui Binet,procedeul prezinta avantajul ca rezultatul contine expresiile explicite ale constantelor p si e .

12.3. MISCAREA KEPLERIANA 327
Figura 12.6: Miscarea kepleriana - traiectoria eliptica
Distanta minima, respectiv cea maxima, fata de centrul atractiv, se obtine din solutia(12.46) facand θ = θ1 , respectiv θ = θ1 + π :
rmin =p
1 + e; rmax =
p
1− e(12.61)
Aceste valori pot fi folosite pentru a calcula semiaxele elipsei (v. Fig. 12.6) :
a =1
2(rmin + rmax) =
p
1− e2; b = a
√1− e2 =
p√1− e2
(12.62)
Folosind formulele (12.47) si (12.56), aceste marimi pot fi exprimate prin intermediul con-stantelor E si L0 :
a =L0 2
km
mk2
2|E |L0 2 =k
2|E | ; b =L0 2
km
√√√√ mk2
2|E |L0 2 =L0
√2m|E |
(12.63)
Se observa ca marimea semiaxei mari a elipsei depinde doar de energia mecanicatotala si nu depinde de momentul cinetic al punctului material . Doar marimeasemiaxei mici depinde si de momentul cinetic.
Ecuatia de miscare a punctului pe traiectoria eliptica se obtine din relatia (12.23) din§12.2.1 , care avand ın vedere ca E = − |E| si expresiile (12.63) devine :
t− t0 =
√m
2|E|r∫
r0
rdr√−r2 + 2ar − b2(12.64)
Deoarece ın cazul unei traiectorii eliptice b2 = a2 (1− e2) , rezulta mai departe :
t− t0 =
√ma
k
r∫
r0
rdr√a2e2 − (r − a)2
(12.65)
Cu substitutia naturala :
r − a = − ae cos ξ (12.66)

328 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
integrala (12.65) devine :
t− t0 =
√ma3
k
ξ∫
ξ0
(1− e cos ξ) dξ =
√ma3
k(ξ − e sin ξ)
∣∣∣∣∣∣
ξ
ξ0
(12.67)
Alegand conditiile initiale astfel ıncat la momentul t = t0 punctul sa se gaseasca la o distantaminima de centrul de forte r0 = a (1− e) = rmin , rezulta ξ0 = 0 si ın consecinta legea demiscare a corpului pe traiectoria eliptica ın forma parametrica se scrie :
r = a (1− e cos ξ) , t =T
2π(ξ − e sin ξ) (12.68)
unde T = 2π
√ma3
keste perioada unei revolutii complete a corpului pe elipsa.
Perioada miscarii pe elipsa poate fi calculata si direct, observand ca daca ıntreaga arieπab a elipsei este parcursa ın timpul T , atunci aria descrisa ın unitate de timp trebuie sa fieegala cu viteza areolara :
|Ω | = L0
2m=
πab
T(12.69)
In consecinta, pentru T se obtine valoarea :
T =2mπab
L0=
2mπ
L0
k
2|E |L0
√2m|E |
= πk
√m
2|E |3 = 2πa3/2
√m
k(12.70)
Rezulta ca perioada unei rotatii complete pe elipsa depinde doar de energia totalaa punctului, sau de marimea semiaxei mari si nu depinde de marimea momentuluicinetic, sau de marimea semiaxei mici . Expresia (12.70) poate fi pusa si sub forma :
T 2
a3= 4π2m
k(12.71)
Se observa ca pentru k = fmM , raportulT 2
a3= 4π2 1
fMnu depinde de valoarea masei m .
Ecuatiile (12.46), (12.69), (12.71) reprezinta expresiile matematice ale legilor lui Ke-pler , enuntate la ınceputul sec. al XVII-lea pe baza observatiilor directe efectuate asupramiscarii planetelor :
Legea I : Planetele descriu ın jurul Soarelui elipse, Soarele aflandu-se ın unul din focare.Legea a II-a : Viteza areolara a fiecarei planete ın raport cu Soarele este constanta.Legea a III-a : Raportul dintre patratul timpului de revolutie si cubul semiaxei mari a
orbitei este acelasi pentru toate planetele.Trebuie remarcat ca legea a III-a, asa cum a fost ea formulata de catre Kepler este
adevarata doar aproximativ. Intr-adevar, problema miscarii unei planete ın jurul Soareluieste o problema tipica de miscare a doua corpuri si de aceea cand trebuie efectuat un calcul
corect, ın expresia (12.70) ın locul masei m trebuie sa figureze masa redusa µ =mM
m + Ma

12.3. MISCAREA KEPLERIANA 329
sistemului Soare-planeta, unde M este masa Soarelui, iar m este masa planetei. Deoarecek = fmM , expresia (12.70) devine :
T = 2πa3/2
õ
k= 2πa3/2
√1
f(M + m)= 2πa3/2
√√√√√1
fM(1 +
m
M
) (12.72)
Doar ın aproximatiam
M¿ 1, raportul
T 2
a3=
4π2
fMeste acelasi pentru toate planetele. Cu
exceptia planetei Jupiter, pentru carem
M≈ 0, 05 , aproximatia continuta implicit ın formu-
larea legii a III-a a lui Kepler este justificata pentru toate planetele.
Aplicatii
1. Sa se determine conditiile la care trebuie sa satisfaca parametrii de intrare pe orbita pentruca un corp sa devina un satelit artificial al Pamantului. Se cunoaste raza medie R a Pamantuluisi acceleratia gravitationala g la suprafata sa.
Rezolvare : Presupunand ca Pamantul este un corp omogen cu o forma perfect sferica, sepoate considera ın buna aproximatie ca masa sa M este concentrata ıntr-un punct aflat ın centrulPamantului. Conform teoremei centrului de masa, satelitul poate fi asimilat cu un punct materialde masa m .
Din legea atractiei universale rezulta ca pentru orice corp situat pe suprafata Pamantului sepoate scrie :
F = − k
R2= − fmM
R2= −mg (1)
deci constanta k ce figureaza ın expresia de mai sus a fortei are valoarea :
k = mgR2 (2)
Deoarece M À m , masa redusa µ a sistemului Pamant-Satelit coincide practic cu masa m asatelitului, iar centrul de masa al sistemului coincide cu centrul Pamantului. Ecuatia lui Binet,care reprezinta ecuatia diferentiala a traiectoriei, va avea ın acest caz expresia :
d2
dθ2
(1
r
)+
1
r=
m2gR2
L0 2 (3)

330 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
si va avea solutia generala :
r =p
1 + e cos (θ − θ1)unde p =
L0 2
m2gR2(4)
Centrul Pamantului, care reprezinta originea sistemului de coordonate, va fi situat ın unul dinfocarele conicii (4).
Notand cu r0 , θ0 coordonatele polare ale punctului de intrare P0 pe orbita, cu v0 vitezacorpului ın momentul respectiv si cu α unghiul facut de aceasta viteza cu raza polara, rezulta :
L0 = mr20θ0 = mr0v0 sin α , p =
r20v
20 sin2 α
gR2(5)
Pentru excentricitatea elipsei se va obtine expresia :
e2 = 1 + 2p
r0
(p
2r0 sin2 α− 1
)= 1 + 2
r0v20 sin2 α
gR2
(r0v
20
2gR2− 1
)(6)
Din conditia ca traiectoria sa fie o elipsa (e < 1) rezulta limita superioara a vitezei v0 :
v20 <
2gR2
r0
(7)
Viteza v0 va trebui sa aiba si o limita inferioara, deoarece distanta minima de apropiere fata decentrul de forte trebuie sa fie mai mare ca raza R a Pamantului :
rmin =p
1 + e> R (8)
Rescriind conditia (8) sub forma : (p
R− 1
)2
> e2 (9)
si tinand cont de (6) va rezulta :
pr20 sin2 α−R2
r0 sin α> 2R (r0 −R) (10)
Deoarece r0 > R , pentru ca inegalitatea (10) sa poata fi satisfacuta, va trebui ıntotdeauna ca :
r20 sin2 α−R2 > 0 (11)
Folosind (5b), din (10) rezulta limita inferioara a lui v0 :
v20 >
2gR2
r0
R (r0 −R)
r20 sin2 α−R2
(12)
De obicei conditiile (7) si (12) se grupeaza ın sirul de inegalitati :
2gR2
r0
R (r0 −R)
r20 sin2 α−R2
< v20 <
2gR2
r0
(13)
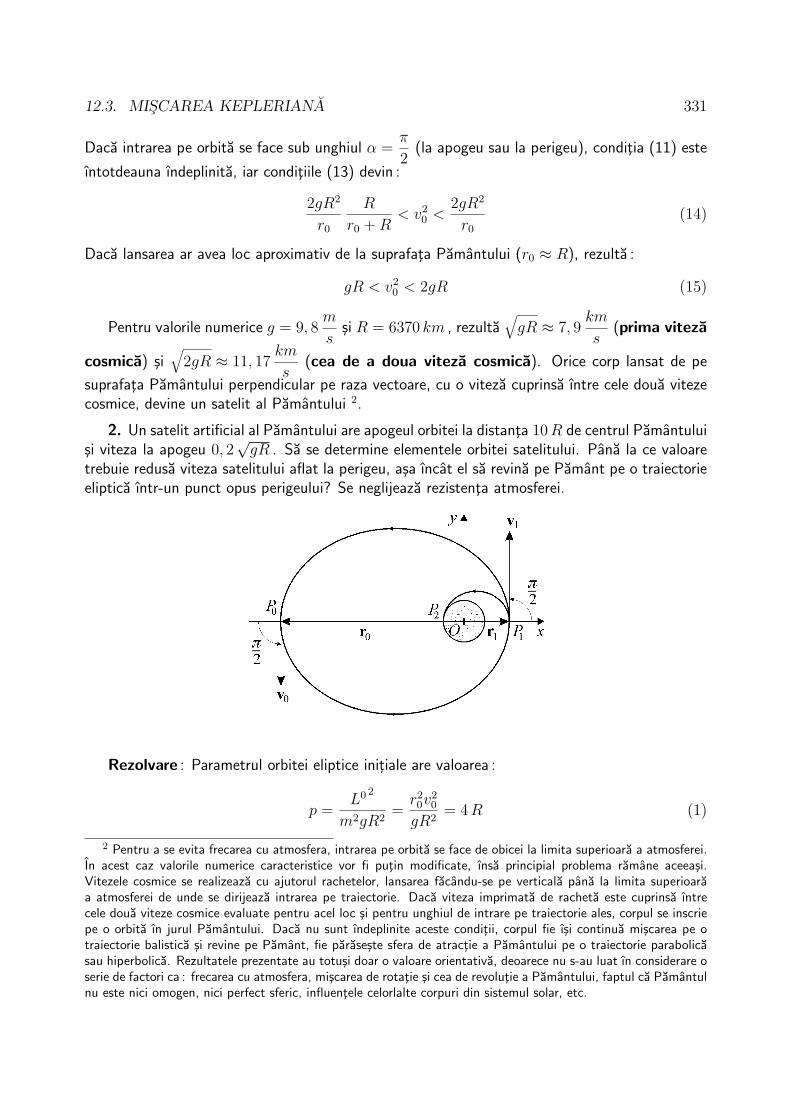
12.3. MISCAREA KEPLERIANA 331
Daca intrarea pe orbita se face sub unghiul α =π
2(la apogeu sau la perigeu), conditia (11) este
ıntotdeauna ındeplinita, iar conditiile (13) devin :
2gR2
r0
R
r0 + R< v2
0 <2gR2
r0
(14)
Daca lansarea ar avea loc aproximativ de la suprafata Pamantului (r0 ≈ R), rezulta :
gR < v20 < 2gR (15)
Pentru valorile numerice g = 9, 8m
ssi R = 6370 km , rezulta
√gR ≈ 7, 9
km
s(prima viteza
cosmica) si√
2gR ≈ 11, 17km
s(cea de a doua viteza cosmica). Orice corp lansat de pe
suprafata Pamantului perpendicular pe raza vectoare, cu o viteza cuprinsa ıntre cele doua vitezecosmice, devine un satelit al Pamantului 2.
2. Un satelit artificial al Pamantului are apogeul orbitei la distanta 10 R de centrul Pamantuluisi viteza la apogeu 0, 2
√gR . Sa se determine elementele orbitei satelitului. Pana la ce valoare
trebuie redusa viteza satelitului aflat la perigeu, asa ıncat el sa revina pe Pamant pe o traiectorieeliptica ıntr-un punct opus perigeului? Se neglijeaza rezistenta atmosferei.
Rezolvare : Parametrul orbitei eliptice initiale are valoarea :
p =L0 2
m2gR2=
r20v
20
gR2= 4 R (1)
2 Pentru a se evita frecarea cu atmosfera, intrarea pe orbita se face de obicei la limita superioara a atmosferei.In acest caz valorile numerice caracteristice vor fi putin modificate, ınsa principial problema ramane aceeasi.Vitezele cosmice se realizeaza cu ajutorul rachetelor, lansarea facandu-se pe verticala pana la limita superioaraa atmosferei de unde se dirijeaza intrarea pe traiectorie. Daca viteza imprimata de racheta este cuprinsa ıntrecele doua viteze cosmice evaluate pentru acel loc si pentru unghiul de intrare pe traiectorie ales, corpul se inscriepe o orbita ın jurul Pamantului. Daca nu sunt ındeplinite aceste conditii, corpul fie ısi continua miscarea pe otraiectorie balistica si revine pe Pamant, fie paraseste sfera de atractie a Pamantului pe o traiectorie parabolicasau hiperbolica. Rezultatele prezentate au totusi doar o valoare orientativa, deoarece nu s-au luat ın considerare oserie de factori ca : frecarea cu atmosfera, miscarea de rotatie si cea de revolutie a Pamantului, faptul ca Pamantulnu este nici omogen, nici perfect sferic, influentele celorlalte corpuri din sistemul solar, etc.

332 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
iar excentricitatea se poate calcula cu formula :
e2 = 1− 2r0v
20
gR2
(1− r0v
20
2gR2
)= 0, 36 , e = 0, 6 (2)
Acelasi rezultat se putea obtine si direct observand ca r0 =p
1− e. Perigeul orbitei satelitului si
viteza lui la perigeu au expresiile :
r1 =p
1 + e= 2, 5 R , v1 =
r0v0
r1
= 0, 8√
gR (3)
Valorile celor doua semiaxe vor fi :
a =1
2(r0 + r1) = 6, 25 R , b = a
√1− e2 = 0, 8 a = 5 R (4)
iar perioada de parcurgere a orbitei va fi data de expresia :
T =2πab
r0v0
=2πab
r1v1
=πab
R√
gR= 31, 25 π
√R
g(5)
Pentru orbita eliptica de coborare, punctul P1 va reprezenta apogeul, iar punctul P2 (r2 = R)va reprezenta perigeul. Semiaxa mare a acestei elipse va fi :
a′ =1
2(r1 + R) (6)
Pe de alta parte se stie ca :
a′ =p′
1− e′2 =
r1
2
1− r1v
′ 21
2gR2
(7)
Egaland cele doua expresii, rezulta :
v′2
1 = 2gR2(
1
r1
− 1
r1 + R
)=
8
35gR deci v′1 ≈ 0, 478
√gR (8)
12.4 Ciocniri elastice
Daca ın urma ciocnirii a doua particule, energia lor interna nu se modifica, se spune caciocnirea este elastica . Din acest motiv, atunci cand se aplica legea conservarii energiei lastudiul ciocnirilor elastice, nu este necesar sa se tina cont de energia interna a particulelor.In cele ce urmeaza nu se va face nici o referire la mecanismul propriu-zis de interactiune,prezentand interes doar relatiile posibile dintre caracteristicile particulelor la un timp sufi-cient de lung ınainte si dupa ciocnire, asa ıncat la momentele respective interactiunea lorreciproca sa poata fi considerata neglijabila.

12.4. CIOCNIRI ELASTICE 333
Studiul ciocnirii elastice a doua particule de mase m1 si m2 reprezinta de asemenea un cazparticular al problemei generale a miscarii a doua corpuri ın interactiune reciproca. Deoarececentrul de masa al sistemului ramane ın repaus, sau se misca rectiliniu uniform, ın raport cuun sistem de referinta inertial numit sistemul laboratorului (SL), determinarea miscariisistemului format din cele doua particule se reduce la studiul miscarii acestuia ın raportcu un sistem de referinta solidar legat de centrul de masa (SCM). Dupa cum s-aaratat ın §12.1 , acesta problema este echivalenta cu studiul miscarii unei particule avandmasa µ ıntr-un camp cu simetrie centrala V (r), pentru care se face ipoteza suplimentaralimr→∞V (r) = 0 .
12.4.1 Cinematica ciocnirilor elastice
Folosind notatiile uzuale, din formulele (12.6) rezulta ca ınainte de ciocnire vitezele
particulelor v′ (−)1 si v
′ (−)2 ın SCM, sunt legate de vitezele acestora v
(−)1 si v
(−)2 ın SL, prin
relatiile :
v′ (−)1 = − m2
m1 + m2
v(−) , v′ (−)2 =
m1
m1 + m2
v(−) (12.73)
unde v(−) reprezinta viteza relativa a particulelor ınainte de ciocnire :
v(−) = v(−)2 − v
(−)1 = v
′ (−)2 − v
′ (−)1 ;
∣∣∣v(−)∣∣∣ ≡ v (12.74)
Aplicand ın SCM legea conservarii impulsului si legea conservarii energiei la limita asimp-
totica(
limr→∞V (r) = 0
)ınainte si dupa ciocnire, rezulta ca :
p′ (−)1 + p
′ (−)2 = p
′ (+)1 + p
′ (+)2 = 0 ;
∣∣∣p′ (−)1
∣∣∣ =∣∣∣p′ (−)
2
∣∣∣ =∣∣∣p′ (+)
1
∣∣∣ =∣∣∣p′ (+)
2
∣∣∣ (12.75)
ceea ce ınseamna ca ın urma ciocnirii nu se modifica marimile impulsurilor ın raport cuSCM, ci doar orientarea lor ın spatiu. Particulele vor fi deviate ın SCM de la directia lorinitiala cu acelasi unghi χ (v. Fig. 12.7a). In plus, din ultimul sir de egalitati rezulta caın urma ciocnirii ramane nemodificata marimea v a vitezei relative a celor doua particule.Notand cu e′ versorul vitezei relative dupa ciocnire, vitezele celor doua particule ın SCMdupa ciocnire vor fi :
v′ (+)1 = − m2
m1 + m2
v e′ , v′ (+)2 =
m1
m1 + m2
v e′ (12.76)
Pentru a reveni ın SL, la aceste expresii va trebui adaugata viteza centrului de masa :
v(+)1 =
m1v(−)1 + m2v
(−)2
m1 + m2
− m2
m1 + m2
v e′
v(+)2 =
m1v(−)1 + m2v
(−)2
m1 + m2
+m1
m1 + m2
v e′(12.77)
Acestea sunt toate informatiile asupra procesului de ciocnire elastica, care pot fi obtinutepe baza legii conservarii impulsului si legii conservarii energiei. In ceea ce priveste directia

334 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Figura 12.7: Cinematica ciocnirii elastice a doua particule
versorului e′ , aceasta depinde de forma potentialului de interactiune a particulelor si depozitia lor reciproca ın timpul ciocnirii.
Rezultatele obtinute au o interpretare geometrica simpla. In acest scop se transcriurelatiile (12.77) folosind impulsurile p
(+)1 si p
(+)2 ale particulelor dupa ciocnire :
p(+)1 =
m1
m1 + m2
(p
(−)1 + p
(−)2
)− µv e′
p(+)2 =
m2
m1 + m2
(p
(−)1 + p
(−)2
)+ µv e′
(12.78)
unde µ =m1m2
m1 + m2
reprezinta masa redusa a sistemului. Se traseaza un cerc de raza µv si
pe un diametru oarecare se construiesc vectorii :
OA =m1
m1 + m2
(p
(−)1 + p
(−)2
), BO =
m2
m1 + m2
(p
(−)1 + p
(−)2
)(12.79)
Considerand pe cerc un punct C avand vectorul de pozitie
OC = µv e′ = p′ (+)2 (12.80)
rezulta ca (v. Fig. 12.7b) :
CA = OA−OC = p(+)1 , BC = BO + OC = p
(+)2 (12.81)
Deoarece vectorii p(−)1 si p
(−)2 sunt dati, raza cercului precum si pozitiile punctelor A si B
vor ramane tot timpul aceleasi, ın schimb punctul C poate ocupa orice pozitie pe cerc.
Prezinta interes ın special cazul particular cand una dintre particule , de exemplu m2 ,se afla ın repaus ınainte de ciocnire : p
(−)2 = 0 . In aceasta situatie |BO| = µv
(−)1 = µv ,
ceea ce ınseamna ca punctul B se situeaza ıntotdeauna pe cerc. Pe de alta parte deoarece|OA||BO| =
m1
m2
, punctul A se va afla fie ın interiorul cercului daca m1 < m2 (v. Fig. 12.8a),
fie ın exteriorul cercului daca m1 > m2 (v. Fig. 12.8b). Observand ca :
BO = µv(−)1 = −µv(−) = −p
′ (−)2 , BA = p
(−)1 (12.82)

12.4. CIOCNIRI ELASTICE 335
Figura 12.8: Diagrama impulsurilor cand particula m2 este ın repaus ınainte de ciocnire
si tinand cont de (12.80) si (12.81), unghiul χ dintre vectorii OB si OC reprezinta unghiulde ımprastiere ın SCM, iar unghiurile ϕ1 si ϕ2 dintre BA si CA , respectiv BC , reprezintaunghiurile ın SL ıntre directiile celor doua particule dupa ımprastiere si directia particuleiincidente. Legatura dintre unghiurile ϕ1 , ϕ2 si unghiul χ se poate citi direct din Fig. 12.8 :
tg ϕ1 =m2 sin χ
m1 + m2 cos χ, ϕ2 =
π − χ
2(12.83)
De asemenea pot fi exprimate usor vitezele v(+)1 si v
(+)2 ale celor doua particule dupa ciocnire,
ın functie de acelasi unghi χ si de viteza relativa v :
v(+)1 =
√m2
1 + m22 + 2m1m2 cos χ
m1 + m2
v , v(+)2 =
2m1 sinχ
2m1 + m2
v (12.84)
Suma ϕ1 + ϕ2 reprezinta unghiul dintre directiile celor doua particule dupa ciocnire.
Din Fig. 12.8 se observa ca ϕ1 + ϕ2 >π
2daca m1 < m2 si ϕ1 + ϕ2 <
π
2daca m1 > m2 .
Se mai observa ca daca m1 < m2 atunci viteza primei particule dupa ciocnire poate aveaorice orientare, ın schimb daca m1 > m2 atunci unghiul de deviatie al acestei particule dela directia initiala nu poate fi mai mare decat o valoare corespunzatoare unei pozitii C ′ a
punctului C pe cerc, asa ıncat dreapta AC ′ sa fie tangenta la cerc. Deoarece sin ϕmax1 =
|OC′||OA|
rezulta :sin ϕmax
1 =m2
m1
; m1 > m2 (12.85)
In cazul unei ciocniri frontale , cand χ = π , pot apare doua posibilitati. Daca m1 < m2 ,punctul C se va gasi pe diametrul cercului ın stanga punctului A , ceea ce ınseamna caϕ1 = π , ϕ2 = 0 si ın consecinta impulsurile p
(+)1 si p
(+)2 dupa ciocnire vor fi de sens contrar.
Daca ınsa m1 > m2 , punctul C se va gasi pe diametrul cercului ıntre punctele A si O , deciϕ1 = ϕ2 = 0 si impulsurile p
(+)1 si p
(+)2 dupa ciocnire vor avea acelasi sens. In ambele situatii,
vitezele particulelor dupa ciocnire vor fi :
v(+)1min
=m1 −m2
m1 + m2
v , v(+)2max =
2m1
m1 + m2
v (12.86)

336 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Se observa ca ın cazul unei ciocniri frontale valoarea lui v(+)2 este cea mai mare posibila. In
consecinta energia maxima pe care o poate capata o particula aflata initial ın repaus, caurma a unei ciocniri elastice, are valoarea :
E(+)2 =
1
2m2 v
(+) 2
2max =4m1m2
(m1 + m2)2 ·
1
2m1v
(−) 2
1 =4m1m2
(m1 + m2)2 E
(−)1 (12.87)
unde E(−)1 reprezinta energia initiala a particulei incidente.
Figura 12.9: Diagrama impulsurilor cand particula m2 este ın repaus si m1 = m2
Cinematica ciocnirii elastice se simplifica considerabil daca cele doua particule au aceeasimasa : m1 = m2 = m . In cazul particular ın care particula m2 se gaseste ın repaus ınaintede ciocnire, punctele A si B se situeaza diametral opus pe cercul de raza µ v , din Fig. 12.9rezultand :
ϕ1 =χ
2, ϕ2 =
π − χ
2(12.88)
respectiv :
v(+)1 = v cos
χ
2, v
(+)2 = v sin
χ
2(12.89)
Unghiul dintre cele doua particule dupa ciocnire va fi ϕ1 + ϕ2 =π
2. Daca ciocnirea este
frontala (χ = π), atunci :
ϕ1 =π
2, ϕ2 = 0 si v
(+)1 = 0 , v
(+)2 = v = v
(−)1 (12.90)
Pentru un practicant al biliardului, ultimele observatii apartin de ”abc”-ul jocului (valoarealui ϕ1 nu are nici o semnificatie !).
12.4.2 Imprastierea particulelor ıntr-un camp de forte centrale
Rezolvarea completa a problemei ciocnirii elastice a doua particule de mase m1 si m2
consta ın exprimarea vectorilor v(+)1 si v
(+)2 ın functie de vectorii cunoscuti v
(−)1 si v
(−)2 si de
unghiul de ımprastiere χ ın SCM. Pentru a-l determina pe χ vor trebui rezolvate ecuatiile demiscare ale sistemului tinand cont de forma concreta a potentialului de interactiune dintre

12.4. CIOCNIRI ELASTICE 337
particule. Dupa cum s-a amintit, fiind o problema tipica de miscare a doua corpuri, problemagenerala se reduce la cea echivalenta, care consta ın studiul devierii unei particule de masaµ ıntr-un camp V (r) , centrul de forte aflandu-se ın originea sistemului de coordonate.
Figura 12.10: Traiectoria particulei ıntr-un camp central repulsiv (a), sau atractiv (b)
Dupa cum s-a aratat ın §12.2.2 , indiferent de faptul ca potentialul V (r) este atractivsau repulsiv, daca E > 0 , traiectoria particulei de masa µ este o curba simetrica fata deraza apsidala OA, cele doua asimptote ale traiectoriei intersectand raza apsidala sub acelasiunghi : Θ ın cazul campului repulsiv ; π − Θ ın cazul campului atractiv (v. Fig. 12.10).Unghiul de ımprastiere χ (unghiul dintre directia incidenta si cea emergenta) va fi :
χ = π − 2Θ
χ = π − 2 (π −Θ) = − π + 2Θ = − (π − 2Θ)
χ = |π − 2Θ| (12.91)
iar unghiul apsidal se calculeaza folosind formula (12.26) :
Θ =
∞∫
rmin
L0
r2dr
√√√√2µ
[E − V (r)− L0 2
2µr2
] (12.92)
unde rmin este o radacina a polinomului de sub radical. Deoarece ın cazul studiat, ın urmaprocesului de interactiune particula care vine de la infinit se ındreapta din nou spre infinit,este comod ca ın cele ce urmeaza ın locul constantelor E si L0 fie utilizate constantele v siρ , unde v reprezinta viteza particulei la o distanta infinita fata de centrul de forte,iar ρ reprezinta parametrul de cionire , adica distanta la care ar trece particula fata decentrul de forte ın absenta interactiunii. Deoarece s-a presupus ca lim
r→∞V (r) = 0 , relatiile
dintre aceste constante vor fi :
E =1
2µv2 ; L0 = µρv (12.93)

338 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Utilizand aceste expresii, formula (12.92) devine :
Θ =
∞∫
rmin
µρv
r2dr
√2µ · 1
2µv2 − 2µV (r)− 2µ
µ2ρ2v2
2µr2
=
∞∫
rmin
ρ
r2dr
√1− 2V (r)
µv2− ρ2
r2
(12.94)
Relatiile (12.91) si (12.94) vor determina legatura dintre unghiul de ımprastiere χ (ınSCM) si parametrul de ciocnire ρ , ın functie de forma potentialului V (r) . Pentru un
potential de interactiune de tip coulombian : V (r) = − k
r(k > 0 pentru camp atractiv,
k < 0 pentru camp repulsiv ; k = −Z1Z2e2), cu schimbarea de variabila u =
1
r; du = − dr
r2
ecuatia (12.94) devine :
Θ =
umax∫
0
du√1
ρ2− 2k
µv2ρ2u− u2
(12.95)
unde umax este radacina polinomului de sub radical :
umax =k
µv2ρ2+
√k2
µ2v4ρ4+
1
ρ2=
k
µv2ρ2+
1
ρ
√1 +
k2
µ2v4ρ2(12.96)
Utilizand formula cunoscuta (v. pag. 325), integrala (12.95) devine :
Θ = − arcsin−umax +
k
µv2ρ2
1
ρ
√1 +
k2
µ2v4ρ2
+ arcsin
k
µv2ρ2
1
ρ
√1 +
k2
µ2v4ρ2
=π
2+ arcsin
k
µv2ρ√1 +
k2
µ2v4ρ2
(12.97)
Dupa calcule elementare, rezultatul (12.97) se transcrie sub forma :
k
µv2ρ= cos Θ ·
√1 +
k2
µ2v4ρ2(12.98)
de unde, avand ın vedere ca x = cos ϑ√
1 + x2 se mai poate scrie si sub forma x2tg2ϑ = 1 ,rezulta :
ρ2 =k2
µ2v4tg2Θ =
k2
µ2v4ctg2χ
2(12.99)
deoarece :
- pentru camp repulsiv : Θ =π − χ
2si tg Θ = ctg
χ
2
- pentru camp atractiv : Θ =π + χ
2si tg Θ = − ctg
χ
2
(12.100)
Presupunem ca asupra centrului de forte cade un fascicul paralel si omogen de particuleidentice, avand fiecare viteza v . Deoarece parametrul de ciocnire ρ difera de la particula

12.4. CIOCNIRI ELASTICE 339
la particula, va fi diferit si unghiul corespunzator de ımprastiere χ fata de directia initiala(v. Fig. 12.11). Astfel se explica fenomenul de ımprastiere al particulelor ce alcatuiescfasciculul ın campul de forte centrale. Notand cu dN numarul de particule deviate ın unitatede timp ın unghiul solid dΩ delimitat de conurile avand deschiderile la varf χ si χ + dχ , sicu n fluxul incident (numarul de particule care traverseaza ın unitate de timp unitatea desuprafata dintr-o sectiune transversala a fasciculului), raportul :
dσ =dN
n(12.101)
va reprezenta sectiunea eficace diferentiala de ımprastiere elastica si are dimensiunea uneisuprafete. Marimea dσ este ın ıntregime determinata de forma potentialului de interactiuneV (r) si reprezinta o caracteristica esentiala a procesului de ımprastiere.
Figura 12.11: Traiectoria particulei ımprastiate sub unghiul χ ıntr-un camp central repulsiv
Admitand ca unghiul de ımprastiere al particulei χ este functie monotona de parametrulde ciocnire ρ , ıntre cele doua marimi trebuie sa existe o corespondenta biunivoca, particuleleımprastiate ın intervalul unghiular χ ÷ χ + dχ avand parametrul de ciocnire cuprins ınintervalul ρ(χ)÷ ρ(χ) + dρ(χ) . Numarul acestor particule este egal cu produsul dintre n sisuprafata unui inel circular din planul transversal delimitat de cercurile de raze ρ si ρ + dρ .In consecinta dN = n·2πρ dρ si formula (12.101) devine :
dσ = 2πρ dρ (12.102)
Pentru a gasi legatura dintre sectiunea eficace diferentiala si unghiul de ımprastiere, relatiaprecendenta se transcrie sub forma :
dσ = 2πρ(χ)
∣∣∣∣∣dρ(χ)
dχ
∣∣∣∣∣ dχ (12.103)
unde derivata este luata ın valoare absoluta, deoarece ın majoritatea cazurilor ρ este o functiemonoton descrescatoare de χ . Trecand la elementul de unghi solid dΩ = 2π sin χ dχ , formula(12.103) devine :
dσ =ρ(χ)
sin χ
∣∣∣∣∣dρ(χ)
dχ
∣∣∣∣∣ dΩ (12.104)

340 CAPITOLUL 12. PROBLEMA CELOR DOUA CORPURI
Deoarece pentru potentialul coulombian V (r) = − k
rparametrul de ciocnire ρ este legat
de unghiul de ımprastiere χ prin relatia ρ =k
µv2ctg
χ
2, se obtine ın final expresia :
dσ =
k
µv2ctg
χ
2sin χ
· 1
2
k
µv2
1
sin2 χ
2
dΩ =
(k
2µv2
)2dΩ
sin4 χ
2
= π
(k
µv2
)2 cosχ
2
sin3 χ
2
dχ (12.105)
unde s-a tinut cont ca dΩ = 4π sinχ
2cos
χ
2dχ . Se observa ca sectiunea eficace diferentiala de
ımprastiere dσ nu depinde de semnul constantei k , asa ıncat formula (12.105) va fi valabilaatat pentru un camp coulombian repulsiv, cat si pentru unul atractiv.
Rezultatele obtinute se refera la problema ımprastierii unui fascicul de particule pe uncentru de forte imobil. In realitate problema fizica concreta consta ın studiul ımprastieriiunui fascicul de particule pe un alt fascicul de particule. Analiza cinematica a procesului (v.§12.4.1) arata ca daca particulele tinta se gasesc initial ın repaus, atunci formulele generale(12.103) si (12.105) definesc sectiunea eficace diferentiala ın functie de unghiul de ımprastiereχ ın SCM. Pentru a gasi expresia lui dσ ın functie de unghiurile de imprastiere ϕ ın SL, vatrebui sa se tina cont de formulele (12.83) care stabilesc legatura dintre unghiurile χ si ϕ .Exprimand pe χ ın functie de ϕ1 se obtine expresia sectiunii de ımprastiere dσ1 a fascicululuiincident, iar exprimand pe χ ın functie de ϕ2 se obtine expresia sectiunii de ımprastiere dσ2
pentru particulele aflate initial ın repaus.Revenind la formula (12.105), facand χ = π−2ϕ2 rezulta sectiunea de ımprastiere pentru
particulele aflate initial ın repaus (particulele tintei) :
dσ2 = 2π
(km1
2µE(−)1
)2sin ϕ2
cos3 ϕ2
dϕ2 =
(km1
2µE(−)1
)2dΩ2
cos3 ϕ2
; 0 ≤ ϕ2 ≤ π
2(12.106)
unde E(−)1 =
1
2m1v
(−) 2
1 =1
2m1v
2 reprezinta energia particulelor incidente.
Deoarece ın cazul general pentru dσ1 se obtine o expresie foarte complicata, vor fi luateın considerare doar doua cazuri particulare :
a) daca m1 ¿ m2 , ceea ce are drept consecinta χ ≈ ϕ1 si µ ≈ m1 , rezulta :
dσ1 =
(k
4E(−)1
)2dΩ1
sin4 ϕ1
2
; 0 ≤ ϕ1 ≤ π (12.107)
Inlocuind aici k = −Z1Z2e2 se obtine formula lui Rutherford , care exprima sectiunea de
ımprastiere a particulelor α (Z1 = 2) pe nuclee grele de sarcina Z2 , ın functie de unghiul deımprastiere.
b) daca m1 = m2 = m , atunci χ = 2ϕ1 , µ =m
2si ın consecinta :
dσ1 = 2π
(k
E(−)1
)2cos ϕ1
sin3 ϕ1
dϕ1 =
(k
E(−)1
)2cos ϕ1
sin4 ϕ1
dΩ1 ; 0 ≤ ϕ1 ≤ π
2(12.108)

12.4. CIOCNIRI ELASTICE 341
Daca particulele incidente sunt identice din toate punctele de vedere (nu numai din cel almasei) cu particulele tintei, atunci este inutil ca dupa ımprastiere sa se mai faca deosebireaıntre particulele aflate initial ın miscare si cele aflate initial ın repaus. Deoarece ϕ1 = ϕ2 = ϕ ,sectiunea de imprastiere globala pentru toate particulele va fi :
dσ = dσ1 + dσ2 =
(k
E(−)1
)2 (1
sin4 ϕ+
1
cos4 ϕ
)cos ϕ dΩ ; 0 ≤ ϕ ≤ π
2(12.109)
In acest caz unghiul maxim de ımprastiere nu poate depasi valoareaπ
2.
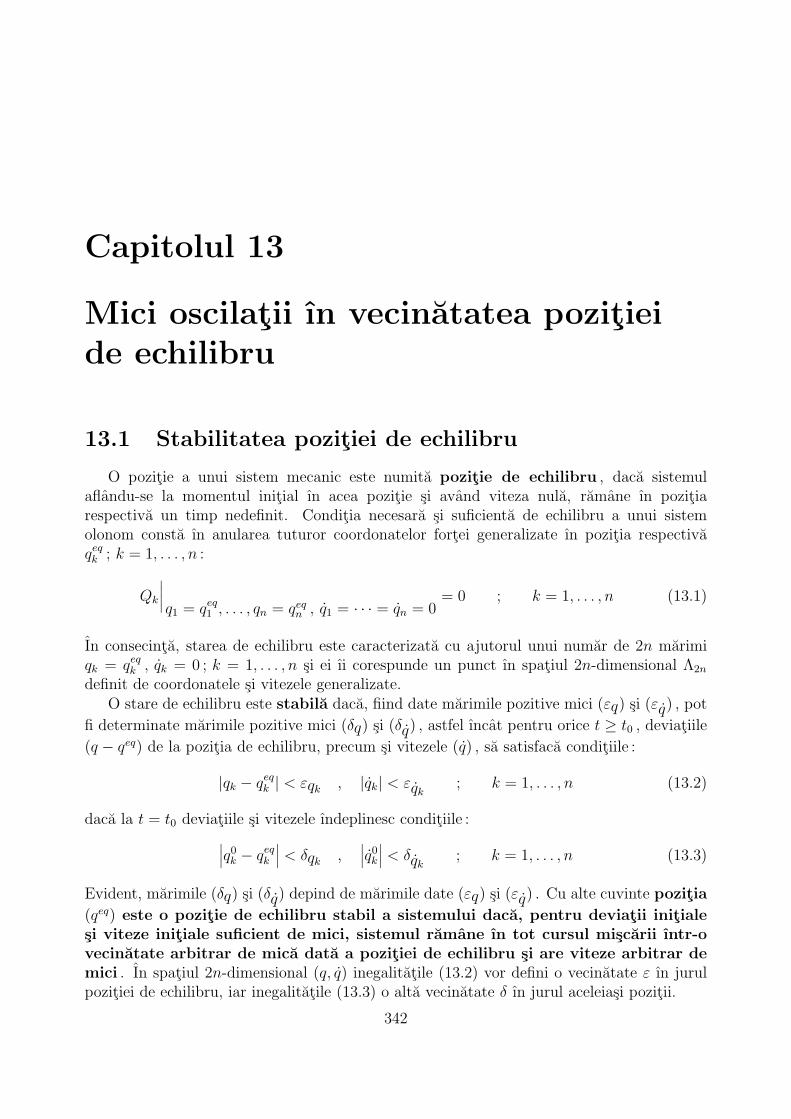
Capitolul 13
Mici oscilatii ın vecinatatea pozitieide echilibru
13.1 Stabilitatea pozitiei de echilibru
O pozitie a unui sistem mecanic este numita pozitie de echilibru , daca sistemulaflandu-se la momentul initial ın acea pozitie si avand viteza nula, ramane ın pozitiarespectiva un timp nedefinit. Conditia necesara si suficienta de echilibru a unui sistemolonom consta ın anularea tuturor coordonatelor fortei generalizate ın pozitia respectivaqeqk ; k = 1, . . . , n :
Qk
∣∣∣∣q1 = qeq
1 , . . . , qn = qeqn , q1 = · · · = qn = 0
= 0 ; k = 1, . . . , n (13.1)
In consecinta, starea de echilibru este caracterizata cu ajutorul unui numar de 2n marimiqk = qeq
k , qk = 0 ; k = 1, . . . , n si ei ıi corespunde un punct ın spatiul 2n-dimensional Λ2n
definit de coordonatele si vitezele generalizate.O stare de echilibru este stabila daca, fiind date marimile pozitive mici (εq) si (εq) , pot
fi determinate marimile pozitive mici (δq) si (δq) , astfel ıncat pentru orice t ≥ t0 , deviatiile
(q − qeq) de la pozitia de echilibru, precum si vitezele (q) , sa satisfaca conditiile :
|qk − qeqk | < εqk , |qk| < εqk
; k = 1, . . . , n (13.2)
daca la t = t0 deviatiile si vitezele ındeplinesc conditiile :
∣∣∣q0k − qeq
k
∣∣∣ < δqk ,∣∣∣q0
k
∣∣∣ < δqk; k = 1, . . . , n (13.3)
Evident, marimile (δq) si (δq) depind de marimile date (εq) si (εq) . Cu alte cuvinte pozitia
(qeq) este o pozitie de echilibru stabil a sistemului daca, pentru deviatii initialesi viteze initiale suficient de mici, sistemul ramane ın tot cursul miscarii ıntr-ovecinatate arbitrar de mica data a pozitiei de echilibru si are viteze arbitrar demici . In spatiul 2n-dimensional (q, q) inegalitatile (13.2) vor defini o vecinatate ε ın jurulpozitiei de echilibru, iar inegalitatile (13.3) o alta vecinatate δ ın jurul aceleiasi pozitii.
342

13.1. STABILITATEA POZITIEI DE ECHILIBRU 343
Se observa ca conditiile de echilibru (13.2) si (13.3) implica cunoasterea miscarii sis-temului qk = qk(t, q
0, q0) ; k = 1, . . . , n , deci implica integrarea prealabila a ecuatiilor demiscare, ceea ce nu este ıntotdeauna posibil folosind metode elementare. Din acest motivapare mai utila cunoasterea unui criteriu de stabilitate a unei pozitii de echilibru, care sanu impuna integrarea ecuatiilor de miscare. Pentru sisteme conservative acest criteriu estedat de teorema Lagrange-Dirichlet , conform careia daca ıntr-o pozitie oarecare aunui sistem conservativ energia potentiala are un minim izolat, atunci pozitiarespectiva reprezinta pozitia de echilibru stabil a sistemului .
Energia poatentiala are un minim izolat ın pozitia de echilibru, daca ıntr-o vecinatate ∆ın jurul pozitiei de echilibru
|qk − qeqk | < ∆k ; k = 1, . . . , n (13.4)
este ındeplinita inegalitatea :
V (q1, . . . , qn) ≥ V (qeq1 , . . . .qeq
n ) (13.5)
egalitatea avand loc doar pentru qk = qeqk ; k = 1, . . . , n . Deoarece ın pozitia (qeq) energia
potentiala are un minim, fortele generalizate aplicate sistemului aflat ın aceasta pozitie vorfi nule :
Qk = − ∂V
∂qk
∣∣∣∣∣(q = qeq)
= 0 ; k = 1, . . . , n (13.6)
Conditia (13.5) poate fi pusa ıntr-o forma mai simpla daca constanta aditiva pana la careeste definita energia potentiala este aleasa astfel ıncat ın pozitia de echilibru functia V sa seanuleze. In acest caz (13.5) devine :
V (q1, . . . , qn) ≥ 0 (13.7)
daca |qk − qeqk | < ∆k ; k = 1, . . . , n . Pe de alta parte, legaturile impuse sistemului fiind
stationare, energia cinetica a sistemului este o forma patratica pozitiv definita de vitezelegeneralizate :
T = T2 =1
2
n∑
k,j=1
akj(q1, . . . , qn) qkqj ≥ 0 (13.8)
si T = 0 doar ın cazul ın care toate vitezele qk sunt nule. Din (13.7) si (13.8) rezulta ca ınvecinatatea ∆ ın jurul pozitiei de echilibru :
E = T + V ≥ 0 (13.9)
egalitatea putand avea loc doar cand toate deviatiile de la pozitia de echilibru si toate vitezelesunt nule. In consecinta, conform teoremei enuntate, energia totala a sistemului ca functiede coordonate si vitezele generalizate are un minim izolat ın punctul (q = qeq , q = 0) alspatiului 2n-dimensional Λ2n .
Se alege o vecinatate ε ın jurul pozitiei de echilibru astfel ıncat :
∆k > εqk > 0 , εqk> 0 (13.10)

344 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
Pentru ca un punct sa se afle pe frontiera acestei vecinatati, va trebui ca cel putin o deviatieqk − qeq
k sa fie egala cu εqk sau cel putin o viteza qk sa fie egala cu εqk, pentru celelalte
deviatii si viteze fiind ındeplinite inegalitatile :∣∣∣qj − qeq
j
∣∣∣ ≤ εqj , |qj| ≤ εqj; j 6= k (13.11)
Valorile energiei totale a sistemului ın punctele de pe frontiera vecinatatii ε definite de(13.10) vor fi notate Eε . Deoarece Eε este o functie continua, ea va atinge pe frontieraconsiderata atat o valoare maxima max Eε , cat si o valoare minima min Eε , ambelepozitive ın baza relatiei (13.9). Deoarece functia continua E se anuleaza doar ın pozitia deechilibru, va exista ıntotdeauna o vecinatate δ ın jurul pozitiei de echilibru asa ıncat :
max Eδ < min Eε (13.12)
unde Eδ reprezinta valorile energiei totale pe frontiera vecinatatii δ . Daca deviatiile initialesi vitezele initiale satisfac inegalitatile (13.3), unde (δq) si (δq) sunt alese astfel ıncat sa fie
ındeplinita conditia (13.12), atunci energia initiala a sistemului E0 < max Eδ . Deoarece s-apresupus ca sistemul este conservativ, energia sa totala ısi pastreaza valoarea initiala E0 ıntot cursul miscarii. In concluzie, pentru o vecinatate ε data ın jurul pozitiei de echilibru, potfi gasite ıntotdeauna o vecinatate δ si astfel de conditii initiale, ıncat ın tot cursul evolutieisistemului :
E = E0 < max Eδ < minEε (13.13)
In consecinta la orice moment de timp t ≥ t0 va trebui ca E < min Eε , ceea ce ınseamnaca ın cursul miscarii, punctul din spatiul 2n-dimensional care descrie aceasta miscare nupoate atinge frontiera vecinatatii ε pe care, dupa cum s-a vazut, E = Eε ≥ min Eε . Cuaceasta teorema este demonstrata.
Ca o ilustrare a celor de mai sus, refacem demonstratia pentru cazul concret al oscila-torului liniar armonic a carui energie totala este data de expresia :
E =1
2m
(q2 + ω2q2
)= E0 , ω2 =
k
m(13.14)
Vecinatatea ε ın jurul pozitiei de echilibru va fi definita de ansamblul de numere pozitiveεq > 0 , εq > 0 si presupunem ca ele sunt astfel alese ıncat ε 2
q < ω2ε 2q . Miscarea fiind
unidimensionala, starea oscilatorului la un moment dat va fi reprezentata printr-un punct ınplanul definit de coordonata q si viteza q . Alegand originea axelor ın pozitia de echilibru,frontiera vecinatatii ε va fi un dreptunghi avand lungimea bazei 2εq si ınaltimea 2εq . In
punctele notate cu ”1” functia Eε va atinge valoarea sa maxima max Eε =1
2m
(ε 2q + ω2ε 2
q)
,
ın punctele notate cu ”2” functia Eε va avea valoarea1
2mω2ε 2
q , iar ın punctele notate cu
”3” functia Eε va atinge valoarea sa minima :
min Eε =1
2mε 2
q (13.15)
Analog, valoarea maxima a energiei pe frontiera vecinatatii δ , care contine punctul cores-punzator starii initiale, va fi egala cu :
max Eδ =1
2m
(δ 2q + ω2δ 2
q)
(13.16)
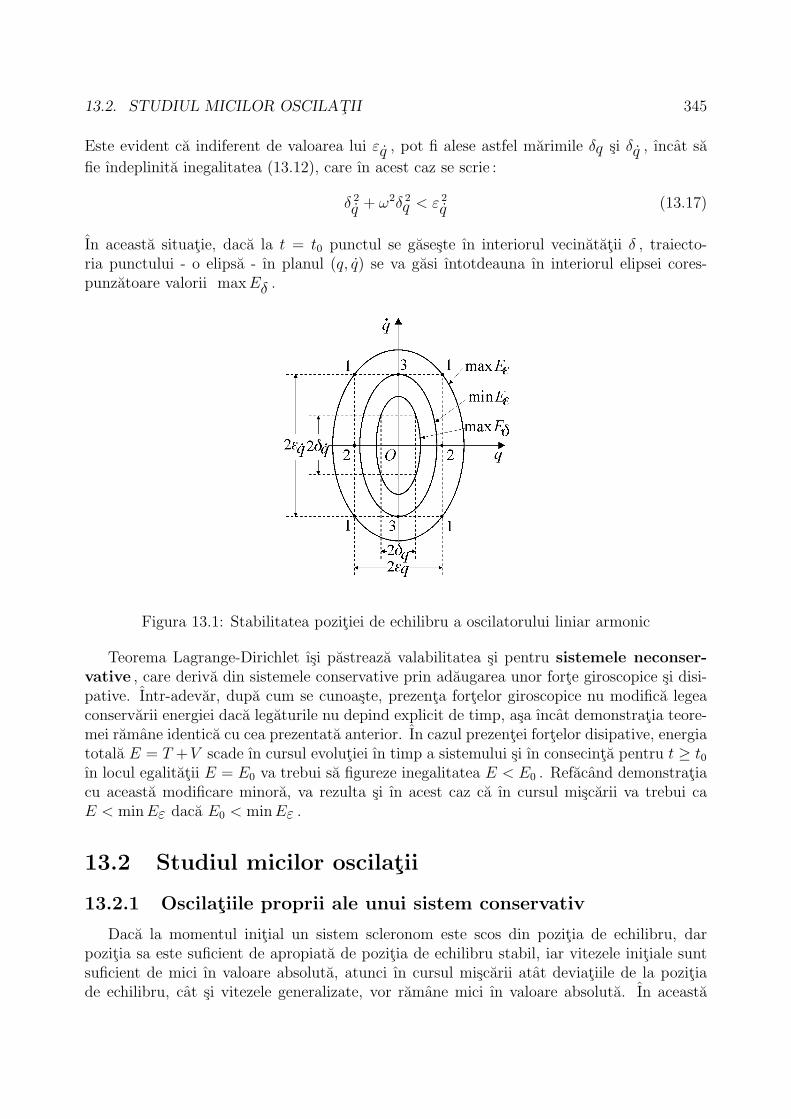
13.2. STUDIUL MICILOR OSCILATII 345
Este evident ca indiferent de valoarea lui εq , pot fi alese astfel marimile δq si δq , ıncat sa
fie ındeplinita inegalitatea (13.12), care ın acest caz se scrie :
δ 2q + ω2δ 2
q < ε 2q (13.17)
In aceasta situatie, daca la t = t0 punctul se gaseste ın interiorul vecinatatii δ , traiecto-ria punctului - o elipsa - ın planul (q, q) se va gasi ıntotdeauna ın interiorul elipsei cores-punzatoare valorii max Eδ .
Figura 13.1: Stabilitatea pozitiei de echilibru a oscilatorului liniar armonic
Teorema Lagrange-Dirichlet ısi pastreaza valabilitatea si pentru sistemele neconser-vative , care deriva din sistemele conservative prin adaugarea unor forte giroscopice si disi-pative. Intr-adevar, dupa cum se cunoaste, prezenta fortelor giroscopice nu modifica legeaconservarii energiei daca legaturile nu depind explicit de timp, asa ıncat demonstratia teore-mei ramane identica cu cea prezentata anterior. In cazul prezentei fortelor disipative, energiatotala E = T +V scade ın cursul evolutiei ın timp a sistemului si ın consecinta pentru t ≥ t0ın locul egalitatii E = E0 va trebui sa figureze inegalitatea E < E0 . Refacand demonstratiacu aceasta modificare minora, va rezulta si ın acest caz ca ın cursul miscarii va trebui caE < min Eε daca E0 < min Eε .
13.2 Studiul micilor oscilatii
13.2.1 Oscilatiile proprii ale unui sistem conservativ
Daca la momentul initial un sistem scleronom este scos din pozitia de echilibru, darpozitia sa este suficient de apropiata de pozitia de echilibru stabil, iar vitezele initiale suntsuficient de mici ın valoare absoluta, atunci ın cursul miscarii atat deviatiile de la pozitiade echilibru, cat si vitezele generalizate, vor ramane mici ın valoare absoluta. In aceasta

346 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
situatie vor putea fi pastrati ın ecuatiile de miscare doar termenii liniari ın aceste deviatiisi viteze, restul termenilor fiind neglijabil de mici. Ecuatiile diferentiale devenind liniare, sespune ca prin acest procedeu s-a liniarizat problema determinarii miscarii.
Pentru un sistem conservativ cu n grade de libertate, energia cinetica si energia potentialaca functii de coordonatele si vitezele generalizate, au expresiile :
T =1
2
n∑
k,j=1
akj(q1, . . . , qn) qkqj , V = V (q1, . . . , qn) (13.18)
unde akj = ajk ; k, j = 1, . . . , n . Dezvoltand energia potentiala ın serie de puteri aledeviatiilor ξk = qk − qeq
k ; k = 1, . . . , n ın jurul pozitiei de echilibru si neglijand termeniisuperiori celor de ordinul doi, rezulta :
V (q1, . . . , qn) = V (qeq1 , . . . , qeq
n ) +n∑
k=1
(∂V
∂qk
)
eq
ξk +1
2
n∑
k,j=1
(∂2V
∂qk∂qj
)
eq
ξkξj (13.19)
Insa ın pozitia de echilibru
(∂V
∂qk
)
eq
= 0 ; k = 1, . . . , n si ın plus se presupune ca constanta
pana la care este definita energia potentiala este astfel aleasa ıncat V (qeq1 , . . . , qeq
n ) = 0 . Inaceste conditii dezvoltarea (13.19) se reduce la expresia :
V =1
2
n∑
k,j=1
ceqkj ξkξj (13.20)
unde ceqkj =
(∂2V
∂qk∂qj
)
eq
, ceqkj = ceq
jk ; k, j = 1, . . . , n . Conform teoremei Lagrange-Dirichlet,
deoarece s-a presupus ca (qeq) este o pozitie de echilibru stabil, va trebui ca V ≥ 0 si ınconsecinta expresia (13.20) a energiei potentiale va fi o forma patratica pozitiv definita dedeviatiile ξk ; k = 1, . . . , n .
Efectuand o dezvoltare analoaga pentru coeficientii ce figureaza ın expresia energiei ci-netice, rezulta :
akj(q1, . . . , qn) = akj(qeq1 , . . . , qeq
n ) +n∑
l=1
(∂akj
∂ql
)
eq
ξl + · · · ; k, j = q, . . . , n (13.21)
Deoarece ξk = qk ; k = 1, . . . , n , energia cinetica este o forma patratica de vitezele ξk ; k =1, . . . , n , asa ıncat daca ne limitam doar la termenii de ordinul doi, este suficient ca ınexpresia lui T sa fie ınlocuit doar primul termen din dezvoltarea (13.21) :
T =1
2
n∑
k,j=1
aeqkj ξkξj (13.22)
unde aeqkj = aeq
jk ; k, j = 1, . . . , n . Sistemul fiind scleronom, energia cinetica va fi o forma
patratica pozitiv definita de vitezele ξk ; k = 1, . . . , n .

13.2. STUDIUL MICILOR OSCILATII 347
In aproximatia indicata, lagrangeeanul problemei va avea expresia :
L = T − V =1
2
n∑
k,j=1
(akj ξkξj − ckj ξkξj
),
akj = ajk
ckj = cjk
; k.j = 1, . . . , n (13.23)
(unde pentru a nu complica scrierea s-a renuntat la specificatia ”eq” pentru coeficienti), iarecuatiile Lagrange care descriu miscarea sistemului vor fi :
n∑
j=1
(akj ξj + ckj ξj
)= 0 ; k = 1, . . . , n (13.24)
Acestea constituie un sistem de n ecuatii diferentiale liniare omogene cu coeficienti constanti,reali si simetrici.
Solutia ecuatiilor (13.24) va fi cautata sub forma :
ξj = Cj eλt ; j = 1, . . . , n (13.25)
Introducand expresiile (13.25) ın ecuatiile (13.24) si simplificand cu eλt se obtin ecuatiilepentru amplitudinile Cj ; j = 1, . . . , n :
n∑
j=1
(akj λ2 + ckj
)Cj = 0 ; k = 1, . . . , n (13.26)
Acest sistem algebric de ecuatii liniare omogene are o solutie nebanala daca determinantulsau este zero :
det(akj λ2 + ckj
)= 0 ; k, j = 1, . . . , n (13.27)
Ecuatia caracteristica (13.27) reprezinta o ecuatie algebrica de gradul 2n ın raport cu λsi ın consecinta are 2n radacini λα , numite valori proprii ale ecuatiei caracteristice. Ingeneral aceste radacini pot fi atat numere reale, cat si numere complex conjugate. In celece urmeaza se face presupunerea ca toate radacinile ecuatiei caracteristice sunt distincte .Amplitudinile Cα
j ; j = 1, . . . , n corespunzatoare unei valori proprii λα vor fi determinate dinsistemul de ecuatii :
n∑
j=1
(akj λ2
α + ckj
)Cα
j = 0 ; k = 1, . . . , n (13.28)
Sistemul de ecuatii diferentiale (13.24) fiind liniar, solutia sa generala va fi o combinatieliniara de solutii particulare (13.25). Deoarece deviatiile ξj ; j = 1, . . . , n sunt niste functiireale, solutia generala va fi partea reala (sau partea imaginara) a unei astfel de combinatiiliniare :
ξj = <
2n∑
α=1
Cαj eλαt
; j = 1, . . . , n (13.29)
Se poate verifica usor ca ın cazul studiat valorile proprii λα trebuie sa fie pur imaginare .Intr-adevar, ınmultind fiecare din ecuatiile (13.28) cu (Cα
k )∗ ; k = 1, . . . , n si sumand dupa

348 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
valorile lui k , rezulta :
λ2α = −
n∑
k,j=1
ckj (Cαk )∗Cα
j
n∑
k,j=1
akj (Cαk )∗Cα
j
(13.30)
Deoarece formele patratice construite pe coeficientii reali si simetrici ckj , akj ; k, j = 1, . . . , nsunt ıntotdeauna pozitiv definite, rezulta ca λ2
α < 0 . Se putea ajunge la acelasi rezultatpornind de la considerente pur fizice, legate de faptul ca sistemul a carui miscare este studiataeste conservativ. Daca marimile λα ar avea si o parte reala, atunci functiile (ξ) si deci sicoordonatele (q) si vitezele (q) ar contine un factor care ar creste sau descreste exponentialın timp. Sistemul fiind conservativ, existenta unui astfel de factor este imposibila, deoareceprezenta sa ar conduce la o variatie ın timp a energiei totale a sistemului E = T + V .
Odata stabilit faptul ca radacinile ecuatiei caracteristice sunt pur imaginare, rezulta caın mod obligator ele sunt grupate ın perechi de numere complex conjugate :
λ+α = +iωα , λ−α = −iωα ; α = 1, . . . , n (13.31)
unde ωα ; α = 1, . . . , n sunt niste marimi reale , numite frecvente proprii ale sistemului.Folosind proprietatea (13.31) a radacinilor ecuatiei caracteristice, solutia generala (13.29)capata forma :
ξj = <
n∑
α=1
[(Cα
j )+ e+iωαt + (Cαj )− e−iωαt
]; j = 1, . . . , n (13.32)
In ceea ce priveste valorile amplitudinilor Cαj ; j = 1, . . . , n corespunzatoare radacinilor
λα , ele se determina rezolvand sistemul de ecuatii (13.28) . Sistemul fiind omogen, iardeterminantul sau diferit de zero, pot fi exprimate un numar de n− 1 astfel de amplitudiniın functie de una singura, de exemplu Cα
n , aleasa arbitrar :
Cαj =
∆αj
∆αn
Cαn ; j, α = 1, . . . , n (13.33)
Aici ∆αj reprezinta complementul algebric al unui element din coloana j a determinantului
caracteristic scris pentru valoarea λ = λα . Deoarece amplitudinea Cαn este nedeterminata,
se poate introduce constanta arbitrara Cα =Cα
n
∆αn
si atunci toate amplitudinile pot fi scrise
sub forma :Cα
j = Cα ∆αj ; j, α = 1, . . . , n (13.34)
Introducand aceste valori ın solutia generala (13.32) rezulta :
ξj = <
n∑
α=1
[C+
α ∆j(+iωα) e+iωαt + C−α ∆j(−iωα) e−iωαt
]; j = 1, . . . , n (13.35)
Mai este de observat ca datorita faptului ca sistemul studiat este conservativ, determinantulcaracteristic contine doar patratele λ2
α = −ω2α , asa ıncat toate complementele algebrice vor
fi niste numere reale care satisfac conditia evidenta :
∆j(+iωα) = ∆j(−iωα) = ∆αj ; j, α = 1, . . . , n (13.36)

13.2. STUDIUL MICILOR OSCILATII 349
Avand ın vedere ca ıntotdeauna se poate scrie :
<C+
α e+iωαt + C−α e−iωαt
= Aα cos (ωαt + βα) ≡ θα ; α = 1, . . . , n (13.37)
unde Aα , βα ; α = 1, . . . , n sunt niste constante reale, solutia generala a sistemului de ecuatiidiferentiale (13.24) capata forma finala :
ξj =n∑
α=1
∆αj θα ; j = 1, . . . , n (13.38)
In consecinta, oscilatiile proprii ale sistemului conservativ, descrise cu ajutoruldeviatiilor ξj ; j = 1, . . . , n , reprezinta o suprapunere de oscilatii armonice sim-ple θ1, . . . , θn avand amplitudini si faze arbitrare, ınsa frecvente bine determinate, numitefrecvente proprii. Desi functiile θj ; j = 1, . . . , n sunt functii strict periodice ın timp, functiileξj ; j = 1, . . . , n nu se bucura ın general de aceasta proprietate. Astfel, daca frecventele pro-prii sunt incomensurabile, niciodata ın cursul miscarii functia ξj nu mai poate trece prin va-loarea sa initiala ξ0
j . Trebuie subliniat ca frecventele proprii caracterizeaza miscareade ansamblu a sistemului mecanic , asa ıncat ele nu pot fi niciodata identificate cufrecventele de oscilatie ale unor puncte oarecare apartinand sistemului, cu exceptia cazuluicand sistemul este compus din puncte care nu interactioneaza ıntre ele.
Problema care se impune ın mod natural este de a vedea daca nu este posibil sa se aleagasetul de coordonate generalizate ale sistemului astfel, ıncat fiecare ın parte sa execute ın timpo oscilatie armonica simpla. Raspunsul este continut ın ınsasi forma solutiei generale (13.38)care poate fi privita ca o transformare liniara de coordonate. Rezolvand sistemul de ecuatii(13.38) ın raport cu necunoscutele (θ) , se obtine noul set de coordonate generalizate θα ; α =1, . . . , n care, avand ın vedere relatiile (13.37), ındeplinesc conditia ceruta. Coordonateleθα ; α = 1, . . . , n poarta numele de coordonate normale , iar oscilatiile periodice simpledescrise de ele poarta numele de oscilatii normale ale sistemului. Frecventele acestoroscilatii vor fi chiar frecventele proprii ale sistemului.
Folosind coordonatele normale θα ; α = 1, . . . , n , precum si vitezele corespunzatoare lorθα ; α = 1, . . . , n , expresiile energiei cinetice T si ale energie potentiale V se transforma ınsume de patrate de viteze, respectiv de coordonate. Intr-adevar, introducand relatiile (13.38)ın (13.20) se obtine pentru energia potentiala expresia :
V =1
2
n∑
k,j=1
ckj ξkξj =1
2
n∑
α,β=1
n∑
k,j=1
ckj ∆βk∆α
j
θβθα (13.39)
Insa coeficientii produselor θβθα sunt ıntotdeauna nuli daca β 6= α . Intr-adevar, ınmultind
ecuatiile (13.28) cu Cβk ; k = 1, . . . , n , sumand dupa valorile lui k si folosind (13.34) se obtine :
n∑
k,j=1
akj ∆βk∆α
j
λ2
α +n∑
k,j=1
ckj ∆βk∆α
j = 0 (13.40)
unde s-a presupus ca Cα 6= 0 si Cβ 6= 0 . Scriind ecuatiile (13.28) folosind niste marimi λβ siefectuand aceeasi succesiune de calcule, rezulta :
n∑
k,j=1
akj ∆βk∆α
j
λ2
β +n∑
k,j=1
ckj ∆βk∆α
j = 0 (13.41)

350 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
unde s-a folosit faptul ca coeficientii akj , ckj ; k, j = 1, . . . , n sunt simetrici ın raport cupermutarea indicilor. Prin scadere se obtine ca :
n∑
k,j=1
akj ∆βk∆α
j
(λ2
α − λ2β
)= 0 (13.42)
si daca α 6= β atunci ın mod obligator :
n∑
k,j=1
akj ∆βk∆α
j = 0 ,n∑
k,j=1
ckj ∆βk∆α
j = 0 ;α 6= β
α, β = 1, . . . , n(13.43)
In consecinta expresia (13.39) pentru energia potentiala devine :
V =1
2
n∑
α=1
cα θ2α unde cα =
n∑
k,j=1
ckj ∆αk∆α
j (13.44)
Procedand ın mod analog cu T , se obtine pentru energia cinetica o expresie asemanatoare :
T =1
2
n∑
α=1
aα θ2α unde aα =
n∑
k,j=1
akj ∆αk∆α
j (13.45)
In fond demonstratia prezentata era inutila, deoarece se stie ca exista ıntotdeauna o transfor-mare liniara cu ajutorul careia doua forme patratice, din care cel putin una pozitiv definita,pot fi aduse simultan la forma canonica (matricea coeficientilor sa fie diagonala).
Folosind expresiile obtinute pentru T si V , pot fi deduse usor ecuatiile Lagrange ıncoordonate normale :
θ2α + ω2
α θα = 0 ; α = 1, . . . , n (13.46)
care acum reprezinta niste ecuatii diferentiale separate care pot fi integrate independent.Solutia generala a fiecarei ecuatii are forma dorita :
θα = Aα cos (ωαt + βα) (13.47)
In ıncheiere ne referim pe scurt la situatiile ın care radacinile ecuatiei caracteristice potfi multiple sau nule.
Daca o radacina a ecuatiei (13.27) este multipla, deci daca una din frecventele propriieste degenerata , atunci solutia generala a problemei va avea tot forma (13.38), ınsa acumcoeficientii ∆α
j corespunzatori frecventelor multiple ωα nu vor mai fi complementele alge-brice ale unor elemente din determinantul caracteristic, ci vor trebui sa fie calculati folosindecuatiile (13.28). Fiecarei frecvente degenerate ıi va corespunde un numar de coordonatenormale distincte, egal cu gradul de degenerare , coordonate care difera ıntre ele prinamplitudini si faze.
Daca una din frecventele proprii este nula ωα = 0 , atunci conform ecuatiei (13.46) :
θα = θα t + θ0 (13.48)
Situatia poate apare ın cazul cand energia potentiala nu are un minim izolat (ın sensuldefinitiei din §13.1), valoarea ei putand fi minima ıntr-un domeniu finit.

13.2. STUDIUL MICILOR OSCILATII 351
13.2.2 Oscilatii amortizate
Studiem micile oscilatii ale unui sistem olonom, scleronom, cu n grade de libertate,ın prezenta unor forte care nu depind explicit de timp si care deriva dintr-un potentialgeneralizat :
Π(q, q) =n∑
k=1
Vk(q) qk + V (q) (13.49)
sau sunt de natura disipativa, acestea din urma fiind liniare ın viteze si deriva dupa regulacunoscuta din functia disipativa a lui Rayleigh :
D =1
2
n∑
k,j=1
bkj qkqj , bkj = bjk ; k, j = 1, . . . , n (13.50)
Ecuatiile Lagrange pentru sistemul studiat au forma generala :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= Qk + Q∗ dk ; k = 1, . . . , n (13.51)
unde :
Qk = − ∂V
∂qk
+n∑
j=1
γkj qj , γkj = − γjk =∂Vk
∂qj
− ∂Vj
∂qk
Q∗ dk = − ∂D
∂qk
= −n∑
j=1
bkj qj , bkj = bjk
; k, j = 1, . . . , n (13.52)
Se observa ca fortele care actioneaza asupra sistemului pot fi potentiale, giroscopice si di-sipative. Pentru a obtine ecuatiile micilor oscilatii, vor trebui dezvoltate aceste expresii ınserii de puteri ale abaterilor ξk = qk − qeq
k ; k = 1, . . . , n si vitezelor ξk = qk ; k = 1, . . . , n ınjurul pozitiei de echilibru stabil ın care energia potentiala are un minim izolat, pozitie datade ecuatiile :
∂V
∂qk
∣∣∣∣∣q1 = qeq
1 , . . . , qn = qeqn
= 0 ; k = 1, . . . , n (13.53)
Dupa cum s-a aratat ın §13.2.1 , daca se neglijeaza termenii superiori celor de ordinul doi,energia cinetica este o forma patratica ın vitezele ξk ; k = 1, . . . , n :
T =1
2
n∑
k,j=1
aeqkj ξkξj (13.54)
unde aeqkj = aeq
jk ; k, j = 1, . . . , n . Efectuand dezvoltari ın serie analoage pentru fortele gene-ralizate si neglijand termenii superiori celor de ordinul ıntai, se obtin expresiile :
Qk = −(
∂V
∂qk
)
eq︸ ︷︷ ︸0
−n∑
j=1
ceqkj ξj +
n∑
j=1
γeqkj ξj
Q∗ dk = −
n∑
j=1
beqkj ξj
; k = 1, . . . , n (13.55)

352 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
unde ceqkj =
(∂2V
∂qj∂qk
)
eq
; k, j = 1, . . . , n . Introducand (13.54) si (13.55) ın ecuatiile (13.51)
si renuntand ın coeficienti la specificatia ”eq”, rezulta sistemul de ecuatii diferentiale pentrudeviatiile ξj ; j = 1, . . . , n :
n∑
j=1
[akj ξj + (bkj − γkj) ξj + ckj ξj
]= 0 ; k = 1, . . . , n (13.56)
Reamintim ca ın acest sistem de ecuatii, coeficientii akj , bkj , ckj ; k, j = 1, . . . , n sunt sime-trici ın raport cu permutarea indicilor, iar coeficientii γkj ; k, j = 1, . . . , n sunt antisimetriciın raport cu aceeasi permutare.
Metoda de rezolvare a sistemului (13.56) este analoaga cu cea folosita ın §13.2.1 . Cautand
o solutie sub forma ξj = Cj eλt ; j = 1, . . . , n rezulta ecuatia caracteristica :
det[akj λ2 + (bkj − γkj) λ + ckj
]= 0 ; k, j = 1, . . . , n (13.57)
precum si ecuatiile pentru amplitudinile Cαj :
n∑
j=1
[akj λ2
α + (bkj − γkj) λα + ckj
]Cα
j = 0 ; k = 1, . . . , n (13.58)
Solutia generala a ecuatiilor (13.56) are forma :
ξj = <
2n∑
α=1
Cαj eλαt
; j = 1, . . . , n (13.59)
unde marimile λα sunt determinate din ecuatia (13.57), iar rapoartele dintre amplitudini dinsistemul omogen (13.58).
Valorile proprii λα pot fi atat numere reale, cat si numere complexe, acestea din urmafiind grupate ın perechi de marimi complex conjugate. Aceasta se datoreste faptului cavalorile λα sunt radacinile unei ecuatii algebrice cu coeficienti reali. In consecinta oricare dinradacinile λα poate fi scrisa ın una din urmatoarele forme :
λ±α = −µα ± iωα , λ±α = −µ±α ; α = 1, . . . , n (13.60)
unde µα , µ±α ; α = 1, . . . , n sunt niste marimi reale care poarta numele de coeficienti deamortizare . Din considerente fizice rezulta ca coeficientii de amortizare sunt pozitivi. Intr-adevar, deoarece asupra sistemului considerat actioneaza si forte disipative, energia sa totalatrebuie sa scada ın timp pe seama lucrului mecanic efectuat de acest forte. Aceasta esteposibil doar daca factorii exponentiali reali care intervin ın solutia generala (13.59) scadmonoton ın timp, adica cand coeficientii de amortizare µα , µ±α ; α = 1, . . . , n sunt pozitivi.
Daca energia disipata este mica, atunci toate radacinile ecuatiei caracteristice sunt com-plex conjugate si solutia generala (13.59) capata forma :
ξj =n∑
α=1
[e−µαt<
C+
α ∆j(−µα + iωα) e+iωαt + C−α ∆j(−µα − iωα) e−iωαt
]; j = 1, . . . , n
(13.61)

13.2. STUDIUL MICILOR OSCILATII 353
si ea descrie oscilatiile amortizate ale sistemului. Daca energia disipata este nula, adicadaca toti coeficientii bkj = 0 ; k, j = 1, . . . , n , atunci radacinile ecuatiei caracteristice suntpur imaginare, coeficientii de amortizare µα ; α = 1, . . . , n sunt toti nuli si sistemul efectueazaoscilatii neamortizate . In cazul ın care coeficientii bkj = 0 ; k, j = 1, . . . , n sunt foartemari, atunci toate radacinile λα sunt pur reale, sistemul efectuand o miscare aperiodicadescrisa de solutia :
ξj =n∑
α=1
[e−µ+
α t<C+
α ∆j(−µ+α )
+ e−µ−α t<
C−
α ∆j(−µ−α )]
; j = 1, . . . , n (13.62)
Este de mentionat ca ın cazul general cand asupra sistemului mecanic actioneaza fortegiroscopice si disipative, pentru complementele algebrice cu ajutorul carora sunt exprimateamplitudinile din solutia generala (13.59) au loc inegalitatile :
∆j(λ+α ) 6= ∆j(λ
−α ) ; j, α = 1, . . . , n (13.63)
Din acest motiv, ın prezenta fortelor disipative, doar ın unele cazuri particulare cele douacomplemente algebrice pot fi egale si doar ın astfel de situatii solutia generala a problemeipoate fi scrisa cu ajutorul unor coordonate ”normale”, introduse ın sensul ca scrise ın acestecoordonate ecuatiile de miscare devin independente ıntre ele.
13.2.3 Oscilatii fortate
Presupunem ca asupra sistemului olonom scleronom aflat sub influenta unor fortepotentiale, giroscopice si disipative, actioneaza suplimentar niste forte nestationare , adicaniste forte care depind explicit si de timp. In aceasta situatie, ecuatiile Lagrange care descriumicile oscilatii ale sistemului ın jurul pozitiei de echilibru stabil, difera de ecuatiile (13.56)prin prezenta ın membrul drept a unor termeni nenuli corespunzatori acestor forte :
n∑
j=1
[akj ξj + (bkj − γkj) ξj + ckj ξj
]= Qe
k(t) ; k = 1, . . . , n (13.64)
unde Qek(t) ; k = 1, . . . , n sunt niste functii date de timp. Solutia generala a acestui sis-
tem neomogen de ecuatii diferentiale se compune din solutia generala a sistemului omogencorespunzator, la care se adauga contributia datorata unei solutii particulare a sistemului ne-omogen. Deoarece solutia generala a sistemului omogen a fost studiata ın §13.2.2 , ea tinzandcatre zero cand t →∞ datorita prezentei coeficientilor de amortizare, ın cele ce urmeaza vafi examinata doar solutia particulara a sistemului (13.64) care va descrie oscilatiile fortateale sistemului considerat .
Pentru simplitate, la ınceput este studiat un sistem cu un sigur grad de libertate ,asupra caruia actioneaza o forta suplimentara care variaza armonic ın timp. Ecuatia demiscare va avea forma :
a11 ξ1 + b11 ξ1 + c11 ξ1 = Qe cos (ωet + βe) (13.65)
unde Qe , ωe , βe reprezinta respectiv amplitudinea, frecventa si faza fortei suplimentare.Fiind mai comoda rezolvarea acestei ecuatii ın forma complexa, se ınlocuieste termenul ce

354 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
figureaza ın membrul drept cu o functie exponentiala :
a11 ξ1 + b11 ξ1 + c11 ξ1 = Qe e i (ωet + βe) (13.66)
si se cauta o solutie particulara a acestei ecuatii sub forma :
ξ1 = Be e i (ωet + βe) (13.67)
Introducand (13.67) ın (13.66) se obtine expresia amplitudinii complexe ce figureaza ınsolutie :
Be = Qe1
∆(iωe)unde ∆(iωe) = a11 (iωe)
2 + b11 (iωe) + c11 (13.68)
Scriind amplitudinea complexa sub forma Be = Ae e iδe si rationalizand numitorul din mem-brul drept :
Ae e iδe = Qe∆∗(iωe)
∆(iωe) ∆∗(iωe)(13.69)
se poate exprima amplitudinea reala Ae si diferenta de faza δe ın functie de frecventa ωe afortei suplimentare. Facand notatiile :
ω20 =
c11
a11
, 2µ =b11
a11
(13.70)
ın urma calculelor rezulta :
Ae =Qe
a11
1√(ω2
0 − ω2e)
2 + 4µ2ω2e
, tg δe = − 2µωe
ω20 − ω2
e
(13.71)
Functia Ae(ωe) poarta numele de caracteristica de amplitudine , iar functia δe(ωe) estecunoscuta sub numele de caracteristica de faza . Avand ın vedere aceste rezultate, parteareala (sau imaginara) a expresiei (13.67) va fi o solutie particulara a ecuatiei (13.65) :
ξe = Ae(ωe) cos [ ωet + βe + δe(ωe)] (13.72)
aceasta reprezentand ”raspunsul” sistemului la actiunea fortei armonice suplimentare.Din (13.71) si (13.72) rezulta ca amplitudinea oscilatiei fortate a sistemului depinde de
amplitudinea fortei perturbatoare Qe , precum si de frecventele ωe si ω0 . De asemenea seobserva ca diferenta de faza δe dintre oscilatia fortata a sistemului si cea a fortei perturbatoareeste ıntotdeauna negativa, indiferent de valoarea lui ωe , cu alte cuvinte oscilatia sistemului”ıntarzie” ıntotdeauna ın raport cu forta care induce oscilatia fortata.
Folosind definitiile (13.71), se pot scrie expresiile amplitudinii Ae si a defazajului δe pentruoscilatiile fortate ale sistemului ın cateva cazuri particulare :
a) ωe ¿ ω0 : Ae ' Qe
a11
1
ω20
, δe ' 0
b) ω2e = ω2
0 − 2µ2 : (Ae)max =Qe
a11
1
2µ√
ω20 − µ2
, tg δe = −√
ω20 − 2µ2
µ
c) ωe = ω0 : Ae =Qe
a11
1
2µω0
, δe = − π
2
d) ωe À ω0 : Ae ' Qe
a11
1
ω2e
, tg δe ' 2µ
ωe
(13.73)
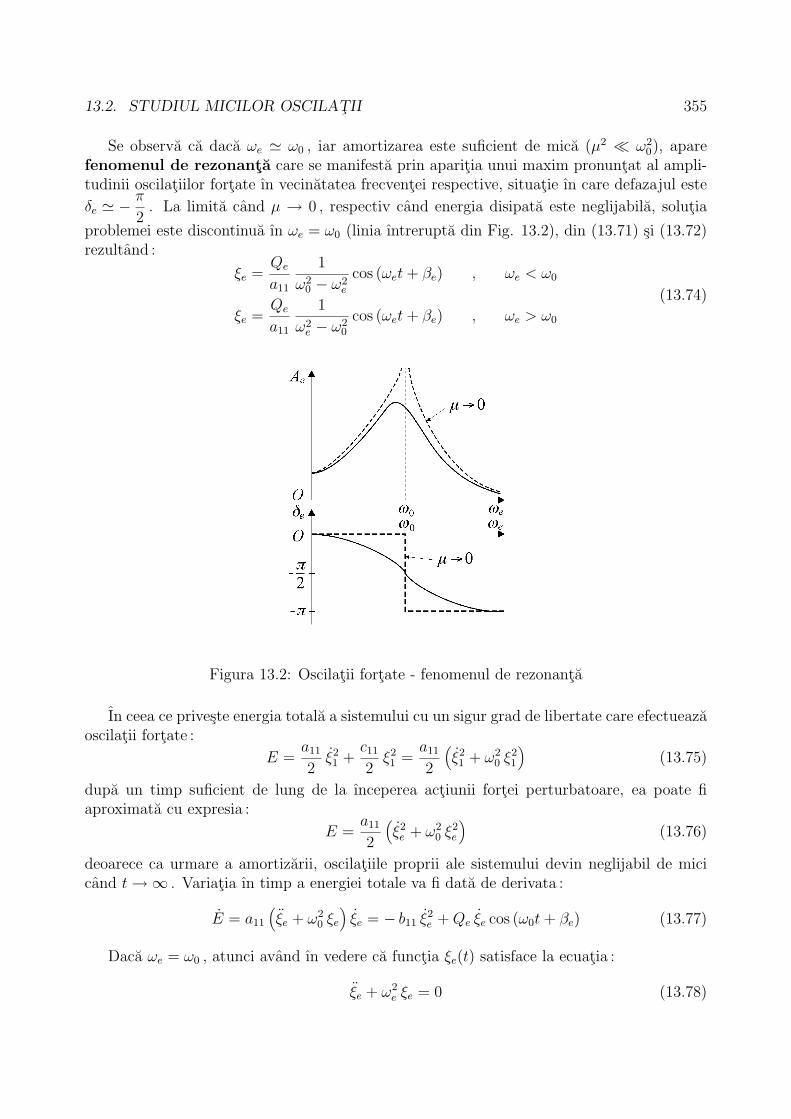
13.2. STUDIUL MICILOR OSCILATII 355
Se observa ca daca ωe ' ω0 , iar amortizarea este suficient de mica (µ2 ¿ ω20), apare
fenomenul de rezonanta care se manifesta prin aparitia unui maxim pronuntat al ampli-tudinii oscilatiilor fortate ın vecinatatea frecventei respective, situatie ın care defazajul este
δe ' − π
2. La limita cand µ → 0 , respectiv cand energia disipata este neglijabila, solutia
problemei este discontinua ın ωe = ω0 (linia ıntrerupta din Fig. 13.2), din (13.71) si (13.72)rezultand :
ξe =Qe
a11
1
ω20 − ω2
e
cos (ωet + βe) , ωe < ω0
ξe =Qe
a11
1
ω2e − ω2
0
cos (ωet + βe) , ωe > ω0
(13.74)
Figura 13.2: Oscilatii fortate - fenomenul de rezonanta
In ceea ce priveste energia totala a sistemului cu un sigur grad de libertate care efectueazaoscilatii fortate :
E =a11
2ξ21 +
c11
2ξ21 =
a11
2
(ξ21 + ω2
0 ξ21
)(13.75)
dupa un timp suficient de lung de la ınceperea actiunii fortei perturbatoare, ea poate fiaproximata cu expresia :
E =a11
2
(ξ2e + ω2
0 ξ2e
)(13.76)
deoarece ca urmare a amortizarii, oscilatiile proprii ale sistemului devin neglijabil de micicand t →∞ . Variatia ın timp a energiei totale va fi data de derivata :
E = a11
(ξe + ω2
0 ξe
)ξe = − b11 ξ2
e + Qe ξe cos (ω0t + βe) (13.77)
Daca ωe = ω0 , atunci avand ın vedere ca functia ξe(t) satisface la ecuatia :
ξe + ω2e ξe = 0 (13.78)

356 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
din (13.77) rezulta ca E = 0 , deci E = const. . Aceasta ınseamna ca daca frecventa forteiperturbatoare este egala cu frecventa oscilatiilor libere ale sistemului ın absenta frecarii,atunci energia adusa ın sistem de forta nestationara compenseaza energia disipata si energiatotala ramane constanta.
In cazul cand ωe 6= ω0 se conserva energia mediata pe perioada oscilatiilor Te =2π
ωe
.
Intr-adevar, mediind ambii termeni din (13.76) pe perioada Te :
E =a11
2
(ξ2e + ω2
0 ξ2e
)(13.79)
si calculand cu (13.72) valorile medii :
ξ2e =
A2e
2, ξ2
e =A2
e ω2e
2(13.80)
se obtine expresia valorii medii a energiei totale pe o perioada :
E =a11
2A2
e
ω2e + ω2
0
2(13.81)
Daca forta nestationara Qe(t) este o functie oarecare de timp, dar care poate fi dezvoltataın serie Fourier :
Qe(t) =∞∑
m=0
Qm cos(mωet + β(m)
e
)(13.82)
atunci solutia care descrie oscilatiile fortate ale sistemului poate fi pusa sub forma :
ξe =∞∑
m=0
Ae(Qm,mωe) cos[mωet + β(m)
e + δe(mωe)]
(13.83)
Folosind rezultatele obtinute ın cazul studiului oscilatiilor fortate ale unui sistem cu unsingur grad de libertate, poate fi efectuata o analiza analoaga a solutiei particulare a ecuatiilor(13.64), care va descrie oscilatiile fortate ale unui sistem cu n grade de libertate .Daca fortele nestationare sunt functii armonice :
Qek(t) = Qe
k cos (ωet + βe) ; k = 1, . . . , n (13.84)
atunci scriind (13.84) sub forma exponentiala si cautand solutia sistemului (13.64) sub forma :
ξj = Aej e iδe
j e i (ωet + βe) (13.85)
se obtine sistemul de ecuatii :
n∑
j=1
[akj λ2
e + (bkj − γkj) λe + ckj
]Ae
j e iδej = Qe
k ; k = 1, . . . , n (13.86)
unde s-a facut notatia λe = i ωe . Solutia acestui sistem de ecuatii liniare neomogene poatefi gasita cu ajutorul regulii lui Cramer :
Aej e iδe
j =∆j(λe)
∆(λe); j = 1, . . . , n (13.87)

13.2. STUDIUL MICILOR OSCILATII 357
unde ∆(λe) este determinantul caracteristic al sistemului de ecuatii omogene calculat pentruλ = λe , iar ∆j(λe) este determinantul obtinut din cel caracteristic prin ınlocuirea coloaneij cu coloana formata din elementele Qe
1, . . . , Qen . Deoarece ecuatia caracteristica are 2n
radacini λα , atunci ∆(λe) poate fi scris sub forma produsului :
∆(λe) = a2n∏
α=1
(λe − λα) (13.88)
unde a este o constanta. Admitand ca toate radacinile ecuatiei caracteristice sunt complexconjugate λ±α = −µα ± iωα ; α = 1, . . . , n , atunci determinantul ∆(λe) poate fi scris subforma unui produs de n factori de forma :
(λe − λ+
α
) (λe − λ−α
)= λ2
e −(λ+
α + λ−α)λe + λ+
α λ−α ; α = 1, . . . , n (13.89)
Avand ın vedere ca :
λ+α + λ−α = − 2µα , λ+
α λ−α = µ2α + ω2
α ≡ ω20α ; α = 1, . . . , n (13.90)
determinantul caracteristic (13.88) capata forma :
∆(λe) = an∏
α=1
[(ω2
0α − ω2e
)+ 2iµαωe
](13.91)
Introducand acest rezultat ın (13.87) si rationalizand numitorul expresiei din membrul drept,se ajunge la concluzia ca amplitudinile oscilatiilor fortate sunt invers proportionale cu unprodus de factori, avand un caracter rezonant :
Aej ∼
1
n∏
α=1
[(ω2
0α − ω2e
)2+ 4µ2
αω2e
]12
; j = 1, . . . , n (13.92)
Astfel, daca amortizarea este suficient de mica, atunci fiecare amplitudine Aej ; j = 1, . . . , n
va avea n maxime de rezonanta pentru frecventele ωe ' ω0α ; α = 1, . . . , n . Aceste maximetind la infinit daca energia disipata este practic nula, adica cand toti µα → 0 ; α = 1, . . . , n .In acest caz limita, expresia precedenta devine :
Aej ∼
1n∏
α=1
(ω2
α − ω2e
) ; j = 1, . . . , n (13.93)
Aplicatii
1. Doua pendule matematice avand aceeasi masa m si aceeasi lungime l , sunt cuplate prinintermediul unui resort cu constanta elastica k a carui lungime ın stare nedeformata este egala cudistanta dintre punctele de suspensie ale pendulelor. Sa se determine miscarea sistemului ın planvertical, ın aproximatia micilor oscilatii si sa se gaseasca conditiile initiale pentru care sistemulefectueaza oscilatii armonice simple.
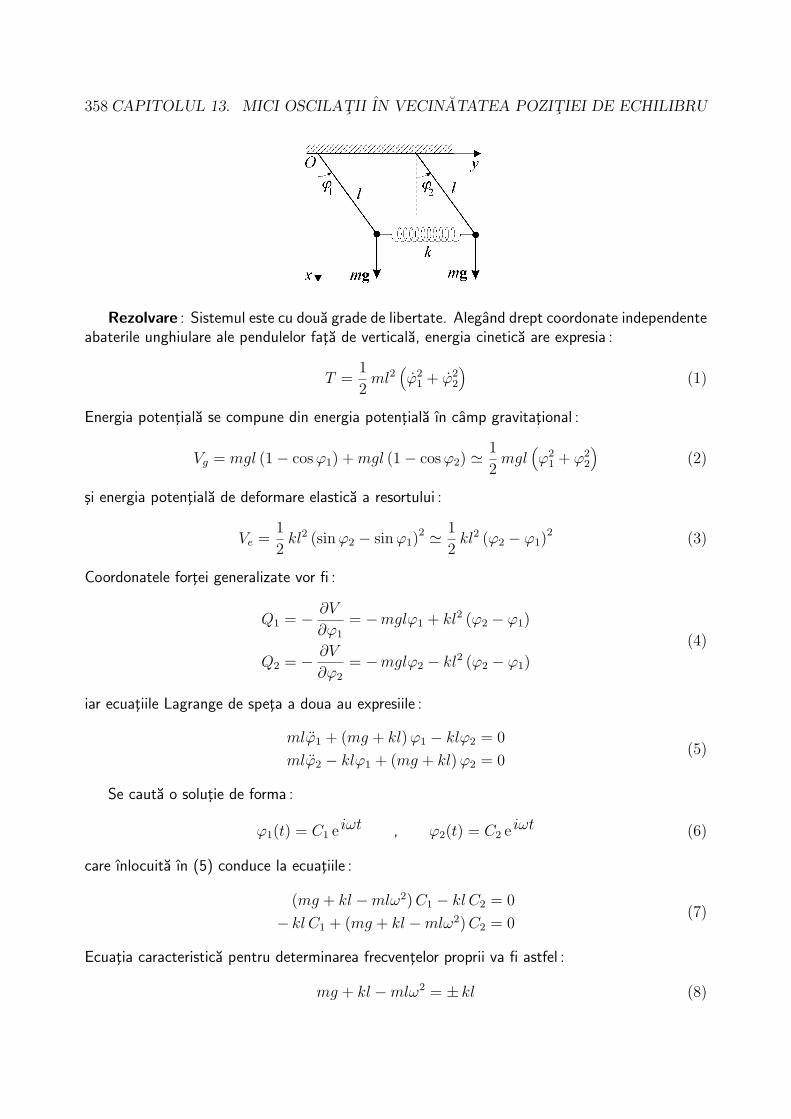
358 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
Rezolvare : Sistemul este cu doua grade de libertate. Alegand drept coordonate independenteabaterile unghiulare ale pendulelor fata de verticala, energia cinetica are expresia :
T =1
2ml2
(ϕ2
1 + ϕ22
)(1)
Energia potentiala se compune din energia potentiala ın camp gravitational :
Vg = mgl (1− cos ϕ1) + mgl (1− cos ϕ2) ' 1
2mgl
(ϕ2
1 + ϕ22
)(2)
si energia potentiala de deformare elastica a resortului :
Ve =1
2kl2 (sin ϕ2 − sin ϕ1)
2 ' 1
2kl2 (ϕ2 − ϕ1)
2 (3)
Coordonatele fortei generalizate vor fi :
Q1 = − ∂V
∂ϕ1
= −mglϕ1 + kl2 (ϕ2 − ϕ1)
Q2 = − ∂V
∂ϕ2
= −mglϕ2 − kl2 (ϕ2 − ϕ1)
(4)
iar ecuatiile Lagrange de speta a doua au expresiile :
mlϕ1 + (mg + kl) ϕ1 − klϕ2 = 0
mlϕ2 − klϕ1 + (mg + kl) ϕ2 = 0(5)
Se cauta o solutie de forma :
ϕ1(t) = C1 e iωt , ϕ2(t) = C2 e iωt (6)
care ınlocuita ın (5) conduce la ecuatiile :
(mg + kl −mlω2) C1 − kl C2 = 0
− kl C1 + (mg + kl −mlω2) C2 = 0(7)
Ecuatia caracteristica pentru determinarea frecventelor proprii va fi astfel :
mg + kl −mlω2 = ± kl (8)

13.2. STUDIUL MICILOR OSCILATII 359
care are radacinile :
ω21 = ω2
0 , ω22 = ω2
0 +2k
munde ω2
0 =g
l(9)
Observand ca C1±1 = C1±
2 si C2±1 = −C2±
2 , solutia generala a sistemului (7) poate fi scrisa subforma :
ϕ1(t) = θ1(t)− θ2(t) , ϕ1(t) = θ1(t) + θ2(t) (10)
unde coordonatele normale au expresiile :
θ1(t) = <C1+
2 eiω1t + C1−2 e−iω1t
= α1 cos(ω1t + β1)
θ2(t) = <C2+
2 eiω2t + C2−2 e−iω2t
= α2 cos(ω2t + β2)
(11)
Constantele α1 , α2 , β1 , β2 , sunt determinate de conditiile initiale :
α1 =1
2
√(ϕ0
1 + ϕ02)
2+
1
ω21
(ϕ01 + ϕ0
2)2
α2 =1
2
√(ϕ0
1 − ϕ02)
2+
1
ω22
(ϕ01 − ϕ0
2)2
;
β1 = arctg
(− 1
ω1
ϕ01 + ϕ0
2
ϕ01 + ϕ0
2
)
β2 = arctg
(− 1
ω2
ϕ01 − ϕ0
2
ϕ01 − ϕ0
2
) (12)
Sistemul va efectua oscilatii armonice simple cu frecventa ω1 daca ϕ01 = ϕ0
2 si ϕ01 = ϕ0
2 ,ecuatiile de miscare fiind :
ϕ1(t) = ϕ2(t) =
√ϕ02
1 +1
ω21
ϕ0 21 cos (ω1t + β1) , β1 = arctg
(− 1
ω1
ϕ01
ϕ01
)(13)
Cele doua pendule oscileaza cu aceeasi amplitudine si se gasesc tot timpul ın aceeasi faza. Resortulde cuplaj ramane relaxat si pendulele nu au nici o influenta unul asupra celuilalt.
Sistemul va efectua oscilatii armonice simple cu frecventa ω2 daca ϕ01 = −ϕ0
2 si ϕ01 = − ϕ0
2 ,ecuatiile de miscare fiind :
ϕ1(t) = −ϕ2(t) = −√
ϕ021 +
1
ω22
ϕ0 21 cos (ω2t + β2) , β2 = arctg
(− 1
ω2
ϕ01
ϕ01
)(14)
Cele doua pendule oscileaza cu aceeasi amplitudine, ınsa se gasesc tot timpul ın faze opuse.Energia castigata sau pierduta de fiecare dintre pendule ın cursul miscarii este ınmagazinatasub forma de energie elastica ın resortul de cuplaj, care sufera alungiri si contractii succesive cufrecventa ω2 > ω1 .

360 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
In coordonate normale, energia cinetica si cea potentiala au expresiile :
T = ml2(θ21 + θ2
2
), V = mgl θ2
1 +(mgl + 2kl2
)θ22 (15)
iar ecuatiile Lagrange corespunzatoare vor fi :
θ1 + ω21 θ1 = 0
θ2 + ω22 θ2 = 0
(16)
unde ω21 si ω2
2 au valorile (9).
2. Sa se studieze micile oscilatii ale pendulelor cuplate ıntr-un mediu care opune o rezistntala miscare proportionala cu viteza.
Rezolvare : La cele doua ecuatii de miscare deduse ın problema anterioara va mai trebuiadaugat ın membrul drept cate un termen care corespunde fortelor obtinute din functia disipativaa lui Rayleigh, care ın cazul sistemului considerat are expresia :
D =1
2k′l2
(ϕ2
1 + ϕ22
), k′ > 0 (1)
Cele doua coordonate ale fortei generalizate disipative vor fi :
Q∗ d1 = − ∂D
∂ϕ1
= − k′l2ϕ1 ; Q∗ d2 = − ∂D
∂ϕ2
= − k′l2ϕ2 (2)
Ecuatiile de miscare vor avea forma :
mlϕ1 + k′lϕ1 + (mg + kl) ϕ1 − klϕ2 = 0
mlϕ2 + k′lϕ2 − klϕ1 + (mg + kl) ϕ2 = 0(3)
Se cauta o solutie de forma :
ϕ1(t) = C1 eλt , ϕ2(t) = C2 eλt (4)
Prin ınlocuire ın (3) rezulta ecuatiile pentru determinarea coeficientilor C1 si C2 :
(mlλ2 + k′lλ + mg + kl) C1 − kl C2 = 0
− kl C1 + (mlλ2 + k′lλ + mg + kl) C2 = 0(5)
Se obtine ecuatia caracteristica :
mlλ2 + k′lλ + mg + kl = ± kl (6)
care are radacinile :λ±1 = −µ± iω1 ; λ±2 = −µ± iω2 (7)
unde s-au facut notatiile :
ω1 =√
ω20 − µ2 , ω2 =
√ω2
0 +2k
m− µ2 unde ω2
0 =g
l, µ =
k′
2m(8)

13.2. STUDIUL MICILOR OSCILATII 361
Observand ca C1±1 = C1±
2 si C2±1 = −C2±
2 , solutia generala a sistemului (3) poate fi scrisaıntotdeauna sub forma :
ϕ1(t) = θ1(t)− θ2(t) , ϕ1(t) = θ1(t) + θ2(t) (9)
unde coordonatele normale au expresiile :
θ1(t) =
e−µt α1 cos (ω1t + β1) ; µ2 < ω20
γ+1 e−µ+
1 t + γ−1 e−µ−1 t ; µ2 > ω20 , µ±1 = µ±
√µ2 − ω2
0
(10)
respectiv :
θ2(t) =
e−µt α2 cos (ω2t + β2) ; µ2 < ω20 +
2k
m
γ+2 e−µ+
2 t + γ−2 e−µ−2 t ; µ2 > ω20 +
2k
m, µ±2 = µ±
√µ2 − ω2
0 −2k
m
(11)
Se observa ca daca rezistenta mediului este suficient de mica µ2 < ω20 , atunci ambele
functii θ1 si θ2 descriu oscilatii armonice amortizate ; daca rezistenta mediului creste, ınsa
ω20 < µ2 < ω2
0 +2k
m, functia θ1 devine aperiodica, ınsa functia θ2 descrie ın continuare o oscilatie
armonica amortizata ; daca ınsa rezistenta mediului depaseste o anumita valoare µ2 > ω20 +
2k
m,
atunci ambele functii θ1 si θ2 descriu miscari aperiodice.In coordonatele θ1 si θ2 , functiile T , V si D au expresiile :
T = ml2(θ21 + θ2
2
), V = mgl θ2
1 +(mgl + 2kl2
)θ22 , D = k′l2
(θ21 + θ2
2
)(12)
iar ecuatiile Lagrange corespunzatoare vor fi :
θ1 + 2µ θ1 + ω20 θ1 = 0
θ2 + 2µ θ2 +
(ω2
0 +2k
m
)θ2 = 0
unde ω20 =
g
l, µ =
k′
2m(13)
3. Se considera sistemul de pendule m1 6= m2 , l1 = l2 = l , cuplate prin intermediul unuiresort k a carui lungime ın stare nedeformata este egala cu distanta dintre punctele de suspensiesi care poate efectua mici oscilatii ın plan vertical. Asupra primului pendul actioneaza o fortaperiodica suplimentara orizontala de pulsatie ωe si amplitudine Qe . Neglijand rezistenta mediului,sa se determine conditiile ın care oscilatiile primului pendul au o amplitudine foarte mica, daca lamomentul initial sistemul se gaseste ın echilibru si ın repaus.

362 CAPITOLUL 13. MICI OSCILATII IN VECINATATEA POZITIEI DE ECHILIBRU
Rezolvare : Energia cinetica a sistemului are expresia :
T =1
2m1ϕ
21 +
1
2m2ϕ
22 (1)
iar energia potentiala (ın aproximatia micilor oscilatii) :
V =1
2m1gl ϕ2
1 +1
2m2gl ϕ2
2 +1
2kl2 (ϕ2 − ϕ1)
2 (2)
Coordonatele fortei generalizate suplimentare se calculeaza cu formulele :
Qe1 = Qe cos ωet
∂y1
∂ϕ1
= Qel cos ωet cos ϕ1 ' Qel cos ωet
Qe1 = Qe cos ωet
∂y1
∂ϕ2
= 0(3)
Ecuatiile Lagrange de speta a doua care descriu miscarea sistemului vor fi :
m1lϕ1 + (m1g + kl) ϕ1 − klϕ2 = Qe cos ωet
m2lϕ2 − klϕ1 + (m2g + kl) ϕ2 = 0(4)
Solutia generala va fi o suma dintre solutia generala a sistemului omogen si o solutie particularaa sistemului neomogen. Solutia sistemului omogen este cautata sub forma :
ϕ′1(t) = C1 e iωt , ϕ′2(t) = C2 e iωt (5)
care ınlocuita ın (4) conduce la ecuatiile pentru determinarea constantelor C1 si C2 :
(m1g + kl −m1lω2) C1 − kl C2 = 0
− kl C1 + (m2g + kl −m2lω2) C2 = 0
(6)
Ecuatia caracteristica :
ω4 −(
2ω20 +
k
m
)ω2 + ω2
0
(ω2
0 +k
m
)= 0 (7)
unde s-au facut notatiile :
ω20 =
g
l,
1
m=
1
m1
+1
m2
(8)
are radacinile :
ω21 = ω2
0 , ω22 = ω2
0 +k
m(9)
Observand ca :C1±
1 = C1±2 , C2±
1 = − m2
m1
C2±2 (10)
solutia generala a sistemului omogen va avea forma :
ϕ′1(t) = θ1(t)− m2
m1
θ2(t) , ϕ′1(t) = θ1(t) + θ2(t) (11)

13.2. STUDIUL MICILOR OSCILATII 363
unde :θ1(t) = α1 cos(ω1t + β1) , θ2(t) = α2 cos(ω2t + β2) (12)
Cautand o solutie particulara a sistemului neomogen (4) sub forma :
ϕ′′1(t) = Be1 cos ωet , ϕ′′2(t) = Be
2 cos ωet (13)
rezulta sistemul algebric :
(m1g + kl −m1lω2e) Be
1 − kl Be2 = Qe
− kl Be1 + (m2g + kl −m2lω
2e) Be
2 = 0(14)
care se rezolva folosind regula lui Cramer :
Be1 =
Qe
m1l
k
m2
−(ω2
e − ω20
)
(ω2
1 − ω2e
) (ω2
2 − ω2e
) , Be2 =
Qe
m1m2l
k(ω2
1 − ω2e
) (ω2
2 − ω2e
) (15)
Solutia generala va fi o suprapunere a solutiilor (11) si (13) :
ϕ1(t) = α1 cos(ω1t + β1)− m2
m1
α2 cos(ω2t + β2) + Be1 cos ωet
ϕ2(t) = α1 cos(ω1t + β1) + α2 cos(ω2t + β2) + Be2 cos ωet
(16)
Impunand conditiile initiale ϕ01 = ϕ0
2 = ϕ01 = ϕ0
2 = 0 rezulta :
ϕ1(t) = α1 cos ω1t− m2
m1
α2 cos ω2t + Be1 cos ωet
ϕ2(t) = α1 cos ω1t + α2 cos ω2t + Be2 cos ωet
(17)
unde :
α1 = − 1
1 +m2
m1
(Be
1 +m2
m1
Be2
), α2 =
1
1 +m2
m1
(Be1 −Be
2) (18)
Se observa ca daca sunt ındeplinite simultan conditiile :
m1 À m2 ;k
m2
≈ ω2e − ω2
0 , ωe > ω0 =
√g
l(19)
atunci solutia (17) devine :ϕ1(t) ≈ 0
ϕ2(t) ≈ Be2 (cos ωet− cos ω2t)
(20)
Amplitudinea oscilatiilor primului pendul este neglijabila deoarece ın conditiile (19) actiunea forteisuplimentare este compensata de reactia resortului si de cea a celui de al doilea pendul.
Capitolul 14
Ecuatiile lui Hamilton
14.1 Spatiul fazelor. Functia lui Hamilton
In cele ce urmeaza studiul va fi limitat doar la sistemele naturale , adica la sistemele olo-nome cu un numar finit de grade de libertate, asupra carora actioneaza forte care deriva dintr-un potential obisnuit sau generalizat. Cunoscand lagrangeeanul sistemului L = L(t, q, q) ,miscarea sa va fi determinata de sistemul de ecuatii diferentiale de ordinul doi :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= 0 ; k = 1, . . . , n (14.1)
Se stie din matematica ca un sistem de ecuatii diferentiale de ordinul doi poate fi re-dus printr-o infinitate de moduri la un sistem de ecuatii diferentiale de ordinul ıntai. Ceamai simpla reducere se obtine considerand ca necunoscute functiile de timp (q, q) , sistemulechivalent avand forma generala :
dqk
dt= qk
dqk
dt=≈Qk (t, q, q)
; k = 1, . . . , n (14.2)
Insa ın calitate de functii necunoscute pot fi alese la fel de bine, pe langa cele n coordonategeneralizate, un numar de alte n functii independente care sa depinda ıntr-un fel sau altulde vitezele generalizate. Hamilton a propus alegerea ca necunoscute ale problemei pe langacoordonatele generalizate si impulsurile generalizate :
pk =∂L
∂qk
; k = 1, . . . , n (14.3)
Ansamblul de variabile independente (q, p) va alcatui setul de coordonate canonice careva fi folosit pentru rezolvarea problemei determinarii miscarii.
Deoarece ın cazul sistemelor naturale se stie ca L = L2 + L1 + L0 , unde L2 este o formapatratica de vitezele generalizate qk ; k = 1, . . . , n , L1 este o forma liniara, iar L0 o formaindependenta de aceleasi variabile, din definitiile (14.3) rezulta :
pk =n∑
j=1
akj(t, q) qk + ck(t, q) ; k = 1, . . . , n (14.4)
364

14.1. SPATIUL FAZELOR. FUNCTIA LUI HAMILTON 365
unde akj ; k, j = 1, . . . , n reprezinta coeficientii formei patratice din energia cinetica, care
pot fi aranjati ıntr-o matrice avand ıntotdeauna determinantul diferit de zero. In bazaacestei proprietati, sistemul de ecuatii liniare (14.4) poate fi rezolvat ın raport cu vitezelegeneralizate, rezultand expresiile :
qk =n∑
j=1
bkj(t, q) pj + dk(t, q) ; k = 1, . . . , n (14.5)
O serie de marimi folosite pana acum, exprimate ın variabilele (t, q, q) ıntre care figureazasi vitezele generalizate, ca de exemplu energia cinetica, fortele generalizate, potentialul ge-neralizat, etc., urmeaza a fi transcrise ın noul set de variabile (t, q, p) care contin coor-donatele canonice, folosind formulele (14.5) . Operatia respectiva va fi marcata simbolicprin semnul ”_” plasat deasupra marimii sau expresiei ın care se fac ınlocuirile specificate_F (t, q, q) → F(t, q, p) , rezultatul reprezentand expresia asociata a functiei respective ınnoua dependenta functionala.
Trecerea de la variabilele (t, q, q) la variabilele (t, q, p) poate fi realizata folosind o metodamult mai simpla, cunoscuta sub numele de transformarea lui Legendre . Metoda va fiilustrata examinand cazul particular al unei functii de doua variabile f(x, y) . Diferentialatotala are expresia generala :
df = u dx + v dy ; u =∂f
∂x, v =
∂f
∂y(14.6)
unde u si v sunt functii de variabilele (x, y) . Trecerea de la variabilele independente (x, y)la variabilele independente (u, y) se face folosind functia g(u, y) :
g = f − ux (14.7)
a carei diferentiala totala este :
dg = df − u dx− x du (14.8)
adica :
dg = −x du + v dy ; x = − ∂g
∂u, v =
∂g
∂y(14.9)
unde x si v sunt acum functii de variabilele (u, y) .Extinzand metoda la cazul trecerii de la variabilele (t, q, q) la variabilele (t, q, p) , ın locul
lagrangeeanului L(t, q, q) va fi utilizata functia :
H(t, q, p) =n∑
k=1
pk
_qk −
_L (14.10)
construita ın analogie cu functia (14.7), ınsa care, pentru comoditatea calculelor ce urmeaza,este ınmultita cu − 1 . Simbolurile plasate deasupra marimilor qk ; k = 1, . . . , n si L , indicafaptul specificat mai sus ca ın aceste expresii vitezele generalizate sunt ınlocuite prin functiide (t, q, p) , cu ajutorul formulelor (14.5). Functia H(t, q, p) astfel definita, poarta numele de
366 CAPITOLUL 14. ECUATIILE LUI HAMILTON
functia lui Hamilton , sau hamiltonian , ea preluand rolul functiei lui Lagrange L(t, q, q)din mecanica lagrangeeana. Folosind echivalentele :
f −→ L x −→ qk ; k = 1, . . . , n
g −→ −H u −→ pk ; k = 1, . . . , n
y −→ t , qk ; k = 1, . . . , n
(14.11)
din egalitati de tipul v =∂f
∂y=
∂g
∂yrezulta :
∂L
∂t= − ∂H
∂tsi
∂L
∂qk
=d
dt
(∂L
∂qk
)= pk = − ∂H
∂qk
; k = 1, . . . , n (14.12)
unde au fost utilizate ecuatiile lui Lagrange (14.1) si definitiile (14.3). Pe de alta parte,
avand ın vedere ca x = − ∂g
∂use obtine :
qk =∂H
∂pk
; k = 1, . . . , n (14.13)
In concluzie, ecuatiile de miscare ın coordonate canonice au forma generala :
qk =∂H
∂pk
, pk = − ∂H
∂qk
; k = 1, . . . , n (14.14)
ele purtand numele de ecuatiile lui Hamilton , sau ecuatii canonice 1 . Deoarece ın hamil-tonianul H(t, q, p) nu intervin derivate ale coordonatelor sau impulsurilor, (14.14) reprezintaun sistem de 2n ecuatii diferentiale de ordinul ıntai ın necunoscutele qk , qk ; k = 1, . . . , n ,care permite determinarea miscarii sistemului dinamic. Ecuatiile lui Hamilton, care repre-zinta echivalentul ecuatiilor lui Lagrange din spatiul configuratiilor Λn , descriu miscareasistemului ıntr-un spatiu 2n-dimensional definit de coordonatele (q, p) , notat cu Λ2n si nu-mit spatiul fazelor , sau spatiul Gibbs . Starii sistemului la un moment dat ın Λ2n ıicorespunde un punct reprezentativ avand coordonatele canonice (q, p) , evolutia ın timpa sistemului mecanic fiind descrisa de ecuatiile parametrice ale traiectoriei punctului repre-zentativ ın spatiul fazelor (v. Fig. 14.1) :
qk = qk(t)
pk = pk(t); k = 1, . . . , n (14.15)
1 Ecuatiile lui Hamilton (14.14) puteau fi obtinute si direct, identificand expresia :
dH =∂H
∂tdt +
n∑
k=1
∂H
∂qkdqk +
n∑
k=1
∂H
∂pkdpk
cu diferentiala totala a definitiei (14.10) :
dH =n∑
k=1
qkdpk +n∑
k=1
pkdqk − ∂L
∂tdt−
n∑
k=1
∂L
∂qkdqk −
n∑
k=1
∂L
∂qkdqk = − ∂L
∂tdt−
n∑
k=1
pkdqk +n∑
k=1
qkdpk
unde au fost folosite ecuatiile lui Lagrange (14.1) si expresiile (14.3).

14.1. SPATIUL FAZELOR. FUNCTIA LUI HAMILTON 367
Figura 14.1: Traiectoria unui punct reprezentativ ın spatiul fazelor
Metoda generala de alcatuire a ecuatiilor lui Hamilton pentru un sistem mecanic dat, im-pune de obicei parcurgerea urmatoarelor etape : construirea lagrangeeanului L(t, q, q) , calcu-lul impulsurilor generalizate cu definitiile (14.3), construirea functiei lui Hamilton H(t, q, p)pornind de la definitia (14.10) ın care se fac ınlocuirile (14.5), si ın final ınlocuirea acesteifunctii ın ecuatiile (14.14), urmata de calculul derivatelor. Dupa cum se va arata ulterior,o parte din etapele aceastei metode aparent foarte greoaie, pot fi evitate ın unele cazuriparticulare.
Se observa ca utilizand ecuatiile lui Hamilton, rezulta identitatea :
dH
dt=
∂H
∂t+
n∑
k=1
(∂H
∂qk
qk +∂H
∂pk
pk
)=
∂H
∂t(14.16)
adica derivata totala ın raport cu timpul a functiei lui Hamilton este egala cuderivata sa partiala . Aceasta ınsemna ca daca functia H = H(q, p) nu depinde explicit
de timp∂H
∂t= 0 , atunci ın baza identitatii (14.16) rezulta
dH
dt= 0 . Cu alte cuvinte, daca
t nu figureaza explicit ın H , ın cursul miscarii sistemului va trebui ca :
H(q, p) = const . (= h) (14.17)
unde h este o constanta determinata de conditiile initiale. Din acest motiv, ın conditiile date(14.17) va reprezenta o integrala prima a sistemului canonic .
Pentru a gasi interpretarea fizica a hamiltonianului , reamintind ca sunt studiatedoar sisteme naturale pentru care L = L2 + L1 + L0 , din definitia (14.10) rezulta ca :
H =n∑
k=1
pk
_qk −
_L=
n∑
k=1
_∂L
∂qk
qk −_L=
n∑
k=1
_∂L2
∂qk
qk +n∑
k=1
_∂L1
∂qk
qk −_L2 −
_L1 −L0 (14.18)
Aplicand teorema lui Euler pentru functii omogenen∑
k=1
∂L2
∂qk
qk = 2 L2 ,n∑
k=1
∂L1
∂qk
qk = L1 , ul-
tima expresie devine :
H =_L2 −L0 (14.19)

368 CAPITOLUL 14. ECUATIILE LUI HAMILTON
Deoarece ın general T = T2 +T1 +T0 , iar fortele aplicate sistemului deriva dintr-un potentialobisnuit V sau un potential generalizat Π = Π1 + V , rezulta ca L2 = T2 , L0 = T0 − V si ınconsecinta :
H =_T2 −T0 + V (14.20)
Daca ın plus sistemul este scleronom, atunci T = T2 , T0 = 0 si deci :
H =_T +V (14.21)
In consecinta, ın cazul unui sistem natural si scleronom, functia lui Hamiltonreprezinta energia mecanica totala a sistemului exprimata cu ajutorul variabilelorcanonice.
Daca sistemul este conservativ , adica daca sistemul este natural, olonom. scleronom,pentru care fortele deriva dintr-un potential obisnuit V care nu depinde explicit de timp,atunci energia totala H nu va contine explicit timpul si ın conformitate cu relatia (14.17)rezulta :
_T +V = h (14.22)
adica integrala energiei . Se observa ca integrala energiei exista de asemenea daca sistemul
este scleronom, fortele deriva dintr-un potential generalizat Π = Π1 + V si ın plus∂V
∂t= 0 ,
deoarece si ın aceasta situatie functia H va fi data de formula (14.21) si de asemenea ea nuva depinde explicit de timp.
14.2 Coordonate ciclice
Ecuatiile lui Hamilton se dovedesc a fi foarte utile pentru determinarea miscarii, ın specialın cazul sistemelor ce contin coordonate ciclice.
Se stie ca daca o coordonata qα este ciclica, adica daca ea nu figureaza explicit ın ex-
presia lagrangeeanului∂L
∂qα
= 0 , atunci impulsul generalizat corespunzator este o constanta
pα = const. . Insa pα = 0 implica conform ecuatiilor lui Hamilton ca∂H
∂qα
= 0 , adica coor-
donata ciclica nu figureaza explicit nici ın expresia hamiltonianului . In consecinta,din punctul de vedere al absentei explicite a unei coordonate ciclice, ıntre lagrangeean si ha-miltonian exista o similitudine perfecta. Insa din punctul de vedere al determinarii miscarii,ıntre cele doua functii L si H exista deosebiri esentale.
Presupunand ca coordonatele qα ; α = m + 1, . . . , n sunt ciclice, functia lui Lagrange sescrie :
L = L(t, q1, . . . , qm, q1, . . . , qn) (14.23)
ea putand contine toate vitezele generalizate. Din acest motiv, indiferent de existentacoordonatelor ciclice, va trebui rezolvata tot o problema cu n grade de libertate, deci pentrudeterminarea miscarii va trebui gasita solutia unui sistem de n ecuatii diferentiale de ordinuldoi.

14.2. COORDONATE CICLICE 369
Daca ınsa miscarea sistemului este descrisa cu ajutorul functiei lui Hamilton, deoareceimpulsurile generalizate corespunzatoare coordonatelor ciclice sunt niste constante pα =bα ; α = m + 1, . . . , n , hamiltonianul se va scrie sub forma generala :
H = H(t, q1, . . . , qm, p1, . . . , pm, bm+1, . . . , bn) (14.24)
adica el va contine doar m coordonate care pot fi determinate ignorand complet existentacoordonatelor ciclice. Acestea ısi manifesta prezenta doar prin intermediul unor con-stante de integrare bα ; α = m + 1, . . . , n care pot di determinate din conditiile initiale.In aceasta situatie sistemul canonic se reduce la primele 2m ecuatii cu 2m necunoscute(q1, . . . , qm, p1, . . . , pm) :
qj =∂H
∂pj
, pj = − ∂H
∂qj
; j = 1, . . . , m (14.25)
solutia sa generala scriindu-se :
qj = qj(t, a1, . . . , am, b1, . . . , bm, bm+1, . . . , bn)
pj = pj(t, a1, . . . , am, b1, . . . , bm, bm+1, . . . , bn); j = 1, . . . , m (14.26)
unde aj , bj ; j = 1, . . . , m sunt constante de integrare. Coordonatele ciclice ramase nedeter-minate qα ; α = m + 1, . . . , n , rezulta din sistemul canonic avand hamiltonianul :
H = H(t, a1, . . . , am, b1, . . . , bn) (14.27)
Folosind ecuatiile
qα =∂H
∂bα
; α = m + 1, . . . , n (14.28)
prin integrari directe rezulta :
qα =∫ ∂H
∂bα
dt + aα ; α = m + 1, . . . , n (14.29)
Astfel, problema determinarii miscarii este rezolvata ın ıntregime, fiind determinate toatefunctiile qk = qk(t) ; k = 1, . . . , n .
14.2.1 Metoda lui Routh
Metoda descrisa, de eliminare din calcule a coordonatelor ciclice, pare simpla doar laprima vedere, aplicarea ei fiind de multe ori greoaie atunci cand trebuie rezolvata o problemaconcreta. In asemenea situatii este preferabila utilizarea metodei lui Routh, care ın esentareprezinta de asemenea o metoda de trecere de la variabilele (q, q) la variabilele (q, p) , ınsacare este realizata doar pentru coordonatele ciclice. In acest caz, dupa cum se va vedea,se obtin niste ecuatii de miscare care, pentru coordonatele ciclice sunt similare ca forma cuecuatiile lui Hamilton, iar pentru celelalte coordonate sunt similare cu ecuatiile lui Lagrange.
Presupunem ca miscarea este descrisa ın setul de variabile independente :
(t, q1, . . . , qm, q1, . . . , qm, qm+1, . . . , qn, pm+1, . . . , pn) (14.30)

370 CAPITOLUL 14. ECUATIILE LUI HAMILTON
Pentru a trece de la setul de variabile (q, q) la setul de variabile (14.30), vor trebui determinatemarimile qα ; α = m + 1, . . . , n din sistemul liniar :
pα =∂L
∂qα
; α = m + 1, . . . , n (14.31)
si admitand ca acest lucru este posibil, va rezulta ca :
qα = qα(t, q1, . . . , qn, q1, . . . , qm, pm+1, . . . , pn) ; α = m + 1, . . . , n (14.32)
Folosind transformarea Legendre, se introduce prin definitia functia lui Routh :
R =n∑
α=m+1
pα
_qα −
_L (14.33)
unde se fac ınlocuirile (14.32). Avand ın vedere ca functia lui Routh depinde de setul de va-riabile independente (14.30), ecuatiile de miscare corespunzatoare coordonatelor pentru carenu se face trecerea la impulsurile generalizate vor trebui sa fie de tipul ecuatiilor Lagrange :
d
dt
(∂R
∂qj
)− ∂R
∂qj
= 0 ; j = 1, . . . , m (14.34)
iar restul de ecuatii care furnizeaza miscarea, corespunzand transformarilor (14.32), vor fi detipul ecuatiilor lui Hamilton :
qα =∂R
∂pα
, pα = − ∂R
∂qα
; α = m + 1, . . . , n (14.35)
Se obtin astfel ecuatiile lui Routh , care consta din m ecuatii diferentiale de ordinuldoi, de tip Lagrange si 2 (n−m) ecuatii diferentiale de ordinul ıntai, de tip Hamilton 2. Inprimul set de ecuatii, functia R joaca rolul lagrangeeanului, iar ın al doilea set de ecuatii,aceeasi functie joaca rolul hamiltonianului.
Daca coordonatele qα ; α = m + 1, . . . , n sunt ciclice, atunci impulsurile generalizatecorespunzatoare sunt niste constante pα = bα ; α = m + 1, . . . , n care pot fi determinate din
2 Diferentiala totala a functiei R este :
dR =∂R
∂tdt +
m∑
j=1
(∂R
∂qjdqj +
∂R
∂qjdqj
)+
n∑α=m+1
(∂R
∂qαdqα +
∂R
∂pαdpα
)
Pe de alta parte, pe baza definitiei pentru functia R se poate scrie :
dR =n∑
α=m+1
(pαdqα + qαdpα)− ∂L
∂tdt−
m∑
j=1
(∂L
∂qjdqj +
∂L
∂qjdqj
)−
n∑α=m+1
(∂L
∂qαdqα +
∂L
∂qαdqα
)=
= − ∂L
∂tdt−
m∑
j=1
(∂L
∂qjdqj +
∂L
∂qjdqj
)−
n∑α=m+1
(∂L
∂qαdqα − qαdpα
)
Identificand cele doua expresii si folosind ecuatiile lui Lagrange, rezulta ecuatiile lui Routh, precum si
egalitatea evidenta∂R
∂t= − ∂L
∂t.

14.2. COORDONATE CICLICE 371
conditiile initiale . Deoarece coordonatele respective nu intervin ın lagrangeean, ele nu vorinterveni explicit nici ın functia lui Routh, care are forma generala :
R = R(t, q1, . . . , qm, q1, . . . , qm, bm+1, . . . , bn) (14.36)
In aceasta situatie, ecuatiile (14.34) pot fi rezolvate facand abstractie de existenta coordo-natelor ciclice, solutia acestora fiind functiile qj = qj(t) ; j = 1, . . . , m . Functiile qα = qα(t) ;
α = m + 1, . . . , n se obtin prin integrarea directa a ecuatiilor qα =∂R
∂bα
; α = m + 1, . . . , n .
Astfel, problema determinarii miscarii sistemului este complet rezolvata.
Aplicatii
1. Sa se scrie ecuatiile lui Hamilton ın coordonate carteziene si sferice pentru punctul materialliber care se misca ıntr-un camp de forte potentiale stationare.
Rezolvare : a) In coordonate carteziene q1 = x , q2 = y , q3 = z , lagrangeeanul are expresia :
L =1
2
(x2 + y2 + z2
)− V (x, y, z) (1)
Din expresiile impulsurilor generalizate :
px =∂L
∂x= mx , py =
∂L
∂y= my , pz =
∂L
∂z= mz (2)
rezulta :x =
px
m, y =
py
m, z =
pz
m(3)
Aplicand definitia, hamiltonianul problemei va fi :
H = px
_x +py
_y +pz
_z − _
L=1
2m
(p2
x + p2y + p2
z
)+ V (x, y, z) (4)
Acelasi rezultat se putea obtine si direct, deoarece :
H =_T2 +V =
1
2m
(_x2 +
_y2 +
_z2
)+ V =
1
2m
(p2
x + p2y + p2
z
)+ V (x, y, z) (5)
Ecuatiile lui Hamilton vor fi :
x =px
m, y =
py
m, z =
pz
m
px = − ∂V
∂x, py = − ∂V
∂y, pz = − ∂V
∂z
(6)
Se observa ca prin eliminarea din ecuatiile (6) a impulsurilor generalizate, se obtin ecuatiile luiNewton ın coodonate carteziene :
mx = − ∂V
∂x, my = − ∂V
∂y, mz = − ∂V
∂z(7)

372 CAPITOLUL 14. ECUATIILE LUI HAMILTON
b) In coordonate sferice q1 = r , q2 = θ , q3 = ϕ , lagrangeeanul are expresia :
L =1
2m
(r2 + r2θ2 + r2 sin2 θ ϕ2
)− V (r, θϕ) (8)
Impulsurile generalizate vor fi :
pr =∂L
∂r= mr , pθ =
∂L
∂θ= mr2θ , pϕ =
∂L
∂ϕ= mr2 sin2 θ ϕ (9)
Hamiltonianul va avea expresia :
H = pr
_r +pθ
_θ +pϕ
_ϕ − _
L=1
2m
[p2
r +1
r2
(p2
θ +p2
ϕ
sin2 θ
)]+ V (r, θ, ϕ) (10)
Rezultatul putea fi obtinut si direct folosind proprietatea H =_T2 +V . Ecuatiile lui Hamilton vor
fi :
r =pr
m, θ =
pθ
mr2, ϕ =
pϕ
mr2 sin2 θ
pr =1
mr3
(p2
θ +p2
ϕ
sin2 θ
)− ∂V
∂r, pθ =
cos θ
mr2 sin3 θp2
ϕ −∂V
∂θ, pϕ = − ∂V
∂ϕ
(11)
2. Sa se deduca ecuatia diferentiala a traiectoriei ın coordonate polare pentru o particulacare se misca ıntr-un camp cu simetrie centrala. Vor fi utilizate ecuatiile lui Hamilton, respectivecuatiile lui Routh.
Rezolvare : Lagrangeeanul problemei ın coordonate polare va avea expresia :
L =1
2m
(r2 + r2θ2
)− V (r) (1)
iar impulsurile generalizate vor fi :
pr =∂L
∂r= mr , pθ =
∂L
∂θ= mr2θ (2)
a) Functia lui Hamilton H(r, θ, pr, pθ) va avea expresia :
H =1
2m
(_r2 +r2
_θ2
)+ V (r) =
1
2m
(p2
r +p2
θ
r2
)+ V (r) (3)
iar ecuatiile lui Hamilton vor fi :
r =∂H
∂pr
=pr
m, θ =
∂H
∂pθ
=pθ
mr2(4)
respectiv :
pr = − ∂H
∂r=
p2θ
mr3− dV
dr, pθ = − ∂H
∂θ= 0 (5)

14.2. COORDONATE CICLICE 373
Din ecuatia (5b) rezulta evident (coordonata θ este ciclica) :
pθ = const. = L0 (6)
Folosind (4a) din ecuatia (5a) rezulta :
mr − L0 2
mr3+
dV
dr= 0 (7)
Pentru a obtine ecuatia diferentiala a traiectoriei se trece de la variabila t la variabila θ folosind(4b) si (6) :
r =dr
dt= θ
dr
dθ=
L0
mr2
dr
dθ= − L0
m
d
dθ
(1
r
)
r =d
dt
(dr
dt
)= θ
d
dθ
[− L0
m
d
dθ
(1
r
)]= − L02
m2r2
d2
dθ2
(1
r
) (8)
Introducand acest rezultat ın ecuatia (7) rezulta ecuatia lui Binet :
d2
dθ2
(1
r
)+
1
r=
mr2
L0 2
dV
dr(9)
b) Coordonata θ fiind ciclica, functia Routh va avea expresia :
R = pθ
_θ − _
L= pθ
_θ −1
2m
(r2 + r2
_θ2
)+ V (r) (10)
Utilizand (2b) se va obtine ın final :
R = − 1
2mr2 +
1
2mr2p2
θ + V (r) (11)
Ecuatia de miscare corespunzatoare coordonatei radiale va fi de forma unei ecuatii Lagranged
dt
(∂R
∂r
)− ∂R
∂r= 0 :
mr − p2θ
mr3+
dV
dr= 0 (12)
Coordonatei θ ıi vor corespunde niste ecuatii de tipul ecuatiilor lui Hamilton :
θ =∂R
∂pθ
=pθ
mr2, pθ = − ∂R
∂θ= 0 (13)
Deoarece din (13b) rezulta pθ = L0 , din (13a) si (12) rezulta ecuatia lui Binet (9).
3. Folosind formalismul hamiltonian, sa se deduca ecuatiile de miscare ale unei particulenerelativiste cu sarcina e si masa m , care se misca ın campul electromagnetic E , B . Forta careactioneaza asupra particulei deriva din potentialul generalizat Π = e ϕ− e (v ·A) .
Rezolvare : Folosind notatiile cunoscute si alegand coodonatele carteziene drept coodonategeneralizate, se va putea scrie :
Π = Π1 + V = − e3∑
k=1
Akxk + e ϕ (1)

374 CAPITOLUL 14. ECUATIILE LUI HAMILTON
si deci lagrangeeanul va avea expresia :
L = T − Π =1
2m
3∑
k=1
x2k + e
3∑
k=1
Akxk − e ϕ (2)
Folosind definitia pentru impulsurile generalizate rezulta :
pk =∂L
∂xk
= mxk + eAk ; k = 1, 2, 3 (3)
de unde se deduce ca :
xk =1
m(pk − eAk) ; k = 1, 2, 3 (4)
Hamiltonianul va avea expresia :
H =3∑
k=1
pk
_xk −
_L =
=1
m
3∑
k=1
pk (pk − eAk)− 1
2m
3∑
k=1
(pk − eAk)2 − 1
m
3∑
k=1
eAk (pk − eAk) + e ϕ =
=1
2m
3∑
k=1
(pk − eAk)2 + e ϕ
(5)
sau ın notatie vectoriala :
H =1
2m
3∑
k=1
(p− eA)2 + e ϕ (6)
La acelasi rezultat se putea ajunge direct folosind (4), precum si proprietatea H =_T2 +V .
Ecuatiile Hamilton vor avea forma :
xk =∂H
∂pk
=1
m(pk − eAk)
pk = − ∂H
∂xk
=e
m
3∑
j=1
(pj − eAj)∂Aj
∂xk
− e∂ϕ
∂xk
; k = 1, 2, 3 (7)
Folosind ecuatiile (7a), din ecuatiile (7b) rezulta :
mxk + edAk
dt= e
3∑
j=1
∂Aj
∂xk
xj − e∂ϕ
∂xk
; k = 1, 2, 3 (8)
DeoarecedAk
dt=
∂Ak
∂t+
3∑
j=1
∂Ak
∂xj
xj ; k = 1, 2, 3 (9)
rezulta ın final :
mxk = − e∂ϕ
∂xk
− e∂Ak
∂t+ e
3∑
j=1
(∂Aj
∂xk
− ∂Ak
∂xj
)xj ; k = 1, 2, 3 (10)

14.2. COORDONATE CICLICE 375
sau ın notatii vectoriale :
m r = − e grad ϕ− e∂A
∂t+ e (v × rotA) (11)
Tinand cont de definitiile :
E = − grad ϕ− ∂A
∂t, B = rotA (12)
se obtine pentru ecuatia de miscare expresia binecunoscuta :
m r = e (E + v ×B) (13)
4. Un pendul matematic de masa m a carui lungime variaza ın timp dupa legea liniaral = l0 (1 + kt) , unde l0 si k sunt niste constante, efectueaza oscilatii ın plan vertical. Cu-noscand acceleratia gravitationala g , se cere sa se deduca ecuatia de miscare a pendulului si sase particularizeze rezultatul pentru cazul micilor oscilatii.
Rezolvare : Alegand drept coodonata generalizata unghiul θ facut la un moment dat de firulde suspensie cu verticala, rezulta :
x = l cos θ = l0 (1 + kt) cos θ
y = l sin θ = l0 (1 + kt) sin θ(1)
iar prin derivare :x = l0k cos θ − l0 (1 + kt) θ sin θ
y = l0k sin θ + l0 (1 + kt) θ cos θ(2)
Energia cinetica va avea astfel expresia :
T =1
2m
(x2 + y2
)=
1
2ml20
[k2 + (1 + kt)2 θ2
](3)
Rezultatul se putea obtine direct folosind coordonatele polare, pentru care T =1
2m
(l2 + l2θ2
).
Deoarece energia potentiala este :
V = −mgx = −mgl0 (1 + kt) cos θ (4)
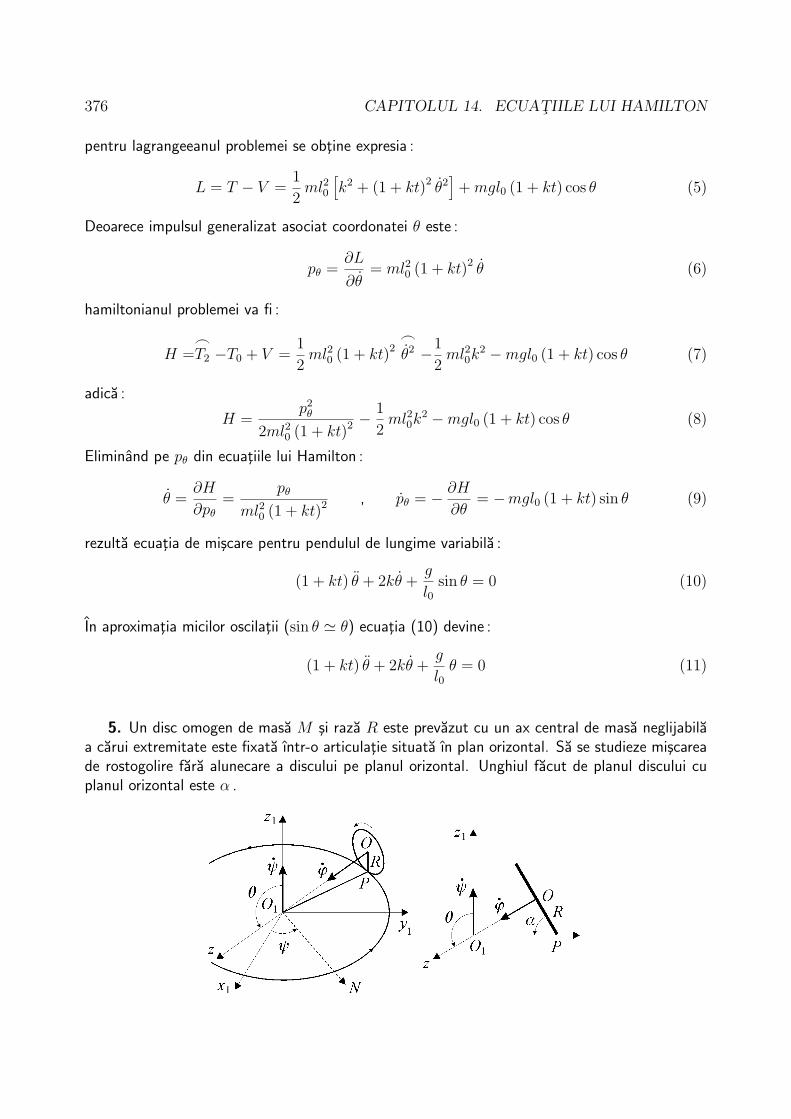
376 CAPITOLUL 14. ECUATIILE LUI HAMILTON
pentru lagrangeeanul problemei se obtine expresia :
L = T − V =1
2ml20
[k2 + (1 + kt)2 θ2
]+ mgl0 (1 + kt) cos θ (5)
Deoarece impulsul generalizat asociat coordonatei θ este :
pθ =∂L
∂θ= ml20 (1 + kt)2 θ (6)
hamiltonianul problemei va fi :
H =_T2 −T0 + V =
1
2ml20 (1 + kt)2
_θ2 −1
2ml20k
2 −mgl0 (1 + kt) cos θ (7)
adica :
H =p2
θ
2ml20 (1 + kt)2 −1
2ml20k
2 −mgl0 (1 + kt) cos θ (8)
Eliminand pe pθ din ecuatiile lui Hamilton :
θ =∂H
∂pθ
=pθ
ml20 (1 + kt)2 , pθ = − ∂H
∂θ= −mgl0 (1 + kt) sin θ (9)
rezulta ecuatia de miscare pentru pendulul de lungime variabila :
(1 + kt) θ + 2kθ +g
l0sin θ = 0 (10)
In aproximatia micilor oscilatii (sin θ ' θ) ecuatia (10) devine :
(1 + kt) θ + 2kθ +g
l0θ = 0 (11)
5. Un disc omogen de masa M si raza R este prevazut cu un ax central de masa neglijabilaa carui extremitate este fixata ıntr-o articulatie situata ın plan orizontal. Sa se studieze miscareade rostogolire fara alunecare a discului pe planul orizontal. Unghiul facut de planul discului cuplanul orizontal este α .

14.2. COORDONATE CICLICE 377
Rezolvare : Sistemul de referinta mobil se alege astfel ıncat axa Oz sa coincida cu axulcentral al discului. Conform enuntului, unghiul de nutatie este constant si egal cu :
θ = π − α (1)
Componentele vectorului rotatie ın cele doua sisteme de referinta, fix si mobil, vor fi :
ωx1= ϕ sin ψ sin α
ωy1= − ϕ cos ψ sin α
ωx1= − ϕ cos α + ψ
,
ωx = ψ sin ϕ sin α
ωy = ψ cos ϕ sin α
ωx = − ψ cos α + ϕ
(2)
Deoarece discul se rostogoleste fara sa alunece, din conditia de anulare a vitezei absolute apunctului de contact P rezulta relatia de legatura (se poate citi direct din figura) :
ψ = ϕ cos α (3)
Energia cinetica va fi :
T =1
2Mv2
O +1
2ω (τω) =
1
2Mv2
O +1
2
[A
(ω2
x + ω2y
)+ Cω2
z
](4)
unde :
vO = ψR tg α·sin α = ψRsin2 α
cos α; A = B =
1
2I , C = I =
1
2MR2 (5)
Facand ınlocuirile si tinand cont ca :
ωz = ψ(
1
cos α− cos α
)= ψ
sin2 α
cos α(6)
rezulta ın final :
T =1
8MR2 sin2 α
(1 + 6 tg2α
)ψ2 (7)
Energia potentiala a discului este constanta :
V = MgzO = MgR sin α (8)
Deoarece impulsul generalizat este :
pψ =∂T
∂ψ=
1
4MR2 sin2 α
(1 + 6 tg2α
)ψ (9)
hamiltonianul sistemului va avea expresia :
H =_T +V =
2 p2ψ
MR2 sin2 α(1 + 6 tg2α
) + MgR sin α (10)
Ecuatiile lui Hamilton vor fi :
ψ =∂H
∂pψ
=4 pψ
MR2 sin2 α(1 + 6 tg2α
) , pψ = − ∂H
∂ψ= 0 (11)

378 CAPITOLUL 14. ECUATIILE LUI HAMILTON
Cea de a doua ecuatie exprima faptul ca coordonata generalizata ψ este ciclica si astfel impulsulgeneralizat asociat ei, care reprezinta proiectia momentului cinetic pe axa O1z1 este o constantaa miscarii :
pψ = p0ψ (12)
Din prima ecuatie (11) rezulta solutia cautata :
ψ(t) = ψ0 +4 pψt
MR2 sin2 α(1 + 6 tg2α
) (13)
14.3 Parantezele Poisson
In cele ce urmeaza vor fi discutate mai amanuntit o serie de proprietati ale integralelorprime ale sistemului de ecuatii de miscare ale lui Hamilton. Se stie ca o integrala prima asistemului de 2n ecuatii diferentiale de ordinul ıntai :
qk =∂H
∂pk
, pk = − ∂H
∂qk
; k = 1, . . . , n (14.37)
este o functie f(t, q, p) care se reduce identic, pentru orice t , la o constanta, cand necunos-cutele (q, p) sunt solutii ale ecuatiilor (14.37) :
f(t, q, p) = const . (14.38)
Dupa cum s-a vazut anterior, daca timpul nu intervine explicit ın hamiltonian, atunci H(q, p)este o integrala prima a sistemului canonic. Analog, daca qα este o coordonata ciclica, aunciimpulsul generalizat corespunzator pα este de asemenea o integrala prima a ecuatiilor demiscare.
Este evident ca daca functiile f1, . . . , fl sunt integrale prime ale ecuatiilor de miscare,atunci orice functie F (f1, . . . , fl) va fi de asemenea o integrala prima, ınsa ın cele ce urmeazaprezinta interes doar integralele prime independente , numarul total al acestora fiind 2n .Daca se cunoaste acest sistem de 2n integrale prime independente :
fj(t, q, p) = Cj ; j = 1, . . . , 2n (14.39)
atunci prin rezolvarea acestui sistem algebric ın raport cu necunocutele (q, p) , apare posibi-litatea de a obtine direct ecuatiile de miscare ale sistemului :
qk = qk(t, C1, . . . , C2n)
pk = pk(t, C1, . . . , C2n); k = 1, . . . , n (14.40)
cele 2n constante urmand a fi determinate din conditiile initiale ale problemei. Se observaca daca sunt cunoscute toate cele 2n integrale prime independente, atunci este cunoscuta ınıntregime si miscarea sistemului dinamic. Daca sunt cunoscute doar l < 2n integrale primeindependente f1, . . . , fl , atunci avem doar o imagine partiala asupra miscarii sistemului,ınsa cu cat numarul l este mai mare, cu atat informatiile asupra miscarii sunt mai ample.

14.3. PARANTEZELE POISSON 379
Deoarece este putin probabila cunoasterea tuturor celor 2n integrale prime independente alesistemului canonic, obiectivul celor ce urmeaza consta ın determinarea numarului maximposibil de astfel de integrale prime independente ale ecuatiilor de miscare.
Metoda care permite determinarea integralelor prime ale sistemului canonic de ecuatii demiscare este datorata lui Poisson si Jacobi . Cunoscand ca f(t, q, p) este o integrala primape solutia sistemului canonic, ınseamna ca :
df
dt=
∂f
∂t+
n∑
k=1
(∂f
∂qk
qk +∂f
∂pk
pk
)=
∂f
∂t+
n∑
k=1
(∂f
∂qk
∂H
∂pk
− ∂f
∂pk
∂H
∂qk
)= 0 (14.41)
Cu notatia 3 :
[ ϕ, ψ ] =n∑
k=1
(∂ϕ
∂qk
∂ψ
∂pk
− ∂ϕ
∂pk
∂ψ
∂qk
)(14.42)
care reprezinta paranteza Poisson construita pe doua functii arbitrare ϕ(t, q, p) si ψ(t, q, p) ,conditia necesara si suficienta pentru ca functia f(t, q, p) sa fie o integrala primaa sistemului canonic se scrie :
∂f
∂t+ [ f,H ] = 0 (14.43)
Parantezele Poisson satisfac la unele identitati remarcabile, fapt ce le confera o maresuplete ın calcule. In cele ce urmeaza amintim doar cateva dintre acestea, ele putand fiverificate direct cu ajutorul definitiei (14.42) :
[ ϕ, ϕ ] = 0
[ ϕ, ψ ] = − [ ψ, ϕ ]
[ ϕ, c ] = 0 ; c = const .
[ cϕ, ψ ] = c [ ϕ, ψ ] ; c = const .
[ ϕ + ψ, χ ] = [ ϕ, χ ] + [ ψ, χ ]
[ ϕψ, χ ] = ϕ [ ψ, χ ] + ψ [ ϕ, χ ]
∂
∂t[ ϕ, ψ ] =
[∂ϕ
∂t, ψ
]+
[ϕ,
∂ψ
∂t
] (14.44)
unde ın general ϕ , ψ , χ sunt functii cel putin de clasa C1 de timp si de coordonatele canonice.Observand ca pentru coordonatele canonice sunt adevarate proprietatile :
∂qj
∂qk
= δjk ,∂pj
∂pk
= δjk ,∂qj
∂pk
= 0 ; j, k = 1, . . . , n (14.45)
pornind tot de la definitia (14.42) pot fi verificate usor relatiile :
[ qj, ψ ] =∂ψ
∂pj
, [ pj, ψ ] = − ∂ψ
∂qj
; j = 1, . . . , n (14.46)
Daca ψ ≡ H , atunci din (14.46) rezulta ecuatiile lui Hamilton scrise cu ajutorulparantezelor Poisson :
[ qj, H ] = qj , [ pj, H ] = pj ; j = 1, . . . , n (14.47)
3 Aici si ın cele ce urmeaza va fi utilizata notatia cu paranteze drepte [ . . . ] , desi ın majoritatea tratatelorde mecanica teoretica pentru parantezele Poisson este utilizata notatia cu acolade . . . . Deoarece aceastacarte se adreseaza ın special fizicienilor, iar analogul parantezelor Poisson ın mecanica cuantica sunt relatiilede comutare pentru operatorii asociati observabilelor, s-a preferat notatia mentionata, de altfel folosita curentsi ın alte lucrari de mecanica adresate fizicienilor, de ex. H. Goldstein - Classical Mechanics . Pentru a nuse produce confuzii, la scrierea parantezelor Lagrange definite ulterior vor fi folosite paranteze de tip acolada.

380 CAPITOLUL 14. ECUATIILE LUI HAMILTON
remarcandu-se simetria acestora. Identificand succesiv ın (14.46) functia ψ cu qk , respectivcu pk , se obtin parantezele fundamentale ale lui Poisson :
[ qj, qk ] = 0 , [ pj, pk ] = 0 , [ qj, pk ] = δjk ; j, k = 1, . . . , n (14.48)
Orice set de coordonate canonice va trebui sa satisfaca aceste identitati.Pe langa identitatile (14.44), o importanta deosebita ın calcule o prezinta identitatea
lui Poisson :[ ϕ, [ ψ, χ ] ] + [ ψ, [ χ, ϕ ] ] + [ χ, [ ϕ, ψ ] ] = 0 (14.49)
care poate fi scrisa ın patru variante distincte, ın functie de pozitia parantezei Poisson inte-rioare si a sensului ın care se fac permutarile circulare 4.
4 Pentru a demonstra identitatea lui Poisson, se porneste de la observatia ca suma dintre primii doitermeni nu poate contine derivatele de ordinul doi ale functiei χ :
[ϕ, [ψ, χ ] ] + [ ψ, [ χ, ϕ ] ] =
=n∑
k=1
∂ϕ
∂qk
∂
∂pk
n∑
j=1
(∂ψ
∂qj
∂χ
∂pj− ∂ψ
∂pj
∂χ
∂qj
)− ∂ϕ
∂pk
∂
∂qk
n∑
j=1
(∂ψ
∂qj
∂χ
∂pj− ∂ψ
∂pj
∂χ
∂qj
) +
+∂ψ
∂qk
∂
∂pk
n∑
j=1
(∂χ
∂qj
∂ϕ
∂pj− ∂χ
∂pj
∂ϕ
∂qj
)− ∂ψ
∂pk
∂
∂qk
n∑
j=1
(∂χ
∂qj
∂ϕ
∂pj− ∂χ
∂pj
∂ϕ
∂qj
)
=
=n∑
k,j=1
[(∂ϕ
∂qk
∂ψ
∂qj− ∂ψ
∂qk
∂ϕ
∂qj
)∂2χ
∂pk∂pj−
(∂ϕ
∂qk
∂ψ
∂pj− ∂ψ
∂qk
∂ϕ
∂pj
)∂2χ
∂pk∂qj−
−(
∂ϕ
∂pk
∂ψ
∂qj− ∂ψ
∂pk
∂ϕ
∂qj
)∂2χ
∂qk∂pj+
(∂ϕ
∂pk
∂ψ
∂pj− ∂ψ
∂pk
∂ϕ
∂pj
)∂2χ
∂qk∂qj
]+
n∑
j=1
(Aj
∂χ
∂qj+ Bj
∂χ
∂pj
)
unde Aj , Bj ; j = 1, . . . , n sunt expresii care contin derivate ale functiilor ϕ si ψ . Datorita simetriei factorilor,suma dubla este evident nula, asa ıncat :
[ ϕ, [ ψ, χ ] ] + [ ψ, [ χ, ϕ ] ] =n∑
j=1
(Aj
∂χ
∂qj+ Bj
∂χ
∂pj
)
Pentru a determina pe Aj , Bj ; j = 1, . . . , n se transcrie relatia precedenta identificand succesiv pe χ cu qj ,respectiv pj :
Aj = [ϕ, [ψ, qj ] ] + [ ψ, [ qj , ϕ ] ]
Bj = [ ϕ, [ ψ, pj ] ] + [ ψ, [ pj , ϕ ] ]; j = 1, . . . , n
Folosind relatiile (14.46) se obtin ın continuare expresiile :
Aj = −[
ϕ,∂ψ
∂pj
]+
[ψ,
∂ϕ
∂pj
]= −
[∂ϕ
∂pj, ψ
]−
[ϕ,
∂ψ
∂pj
]= − ∂
∂pj[ ϕ,ψ ]
Bj =[
ϕ,∂ψ
∂qj
]−
[ψ,
∂ϕ
∂qj
]=
[∂ϕ
∂qj, ψ
]+
[ϕ,
∂ψ
∂qj
]=
∂
∂qj[ ϕ,ψ ]
; j = 1, . . . , n
Inlocuind aceste rezultate, rezulta ın final :
[ϕ, [ ψ, χ ] ] + [ ψ, [ χ, ϕ ] ] = −n∑
j=1
(∂χ
∂qj
[ϕ,ψ ]∂pj
− ∂χ
∂pj
[ ϕ,ψ ]∂qj
)= − [ χ, [ϕ, ψ ] ]
ceea ce demonstreaza identitatea lui Poisson.

14.3. PARANTEZELE POISSON 381
Pe baza acestor proprietati pot fi enuntate urmatoarele doua teoreme, care permit con-struirea unor integrale prime, pornind de la una, sau cateva integrale prime cunoscute.
Teorema 1. Daca functia lui Hamilton H nu depinde explicit de timp si daca functiaf(t, q, p) este o integrala prima a sistemului canonic, atunci si derivatele partiale succesive∂f
∂t,∂2f
∂t2, . . . vor fi tot integrale prime ale sistemului canonic.
Pentru a demonstra teorema, se aplica operatorul∂
∂tconditiei (14.43) si se foloseste
ultima identitate din (14.44). Rezulta :
∂
∂t
(∂f
∂t
)+
∂
∂t[ f, H ] =
∂
∂t
(∂f
∂t
)+
[∂f
∂t,H
]+
[f,
∂H
∂t
]=
∂
∂t
(∂f
∂t
)+
[∂f
∂t,H
](14.50)
deoarece conform ipotezei∂H
∂t= 0 . Rezultatul arata ca
∂f
∂teste tot o integrala prima a
miscarii. Procedeul poate fi repetat ori de cate ori este necesar.
Teorema 2 (Jacobi-Poisson). Daca f1(t, q, p) si f2(t, q, p) sunt doua integrale prime alesistemului canonic, atunci si paranteza Poisson [ f1, f2 ] este tot o integrala prima a aceluiasisistem.
Intr-adevar, deoarece :
∂f1
∂t+ [ f1, H ] = 0 si
∂f2
∂t+ [ f2, H ] = 0 (14.51)
atunci :
∂
∂t[ f1, f2 ] =
[∂f1
∂t, f2
]+
[f1,
∂f2
∂t
]= − [ [ f1, H ], f2 ]−[ f1, [ f2, H ] ] = [ H, [ f1, f2 ] ] (14.52)
unde s-au folosit proprietatile (14.44) si identitatea lui Poisson (14.49). Din ultima egalitaterezulta :
∂
∂t[ f1, f2 ] + [ [ f1, f2 ], H ] = 0 (14.53)
si atunci [ f1, f2 ] este o integrala prima a ecuatiilor de miscare.
Teorema Jacobi-Poisson furnizeaza o metoda foarte simpla de a construi integrale primeale ecuatiilor de miscare, pornind de la doua integrale prime date f1 si f2 . Odata construitaintegrala prima [ f1, f2 ] , poate fi construita si integrala prima [ f1, [ f1, f2 ] ] , etc. Deoareceprocedeul poate fi continuat de o infinitate de ori, iar numarul de integrale prime inde-pendente ale sistemului canonic este 2n , noua integrala prima astfel construita poate sa sedovedeasca a fi fie identic nula, fie o functie de integralele prime deja cunoscute.
Observatia ramane valabila si pentru sirul de integrale prime construite prin metodaindicata de prima teorema. Acesta este motivul pentru care este foarte putin probabil, caprin aplicarea simultana sau succesiva a celor doua teoreme mentionate, sa poata fi construitsirul complet de 2n integrale prime independente, care sa permita determinarea miscarii prinrezolvarea unui sistem algebric.

382 CAPITOLUL 14. ECUATIILE LUI HAMILTON
Ilustram metoda de construire a integralelor prime bazata pe teorema Jacobi-Poissonprin construirea parantezelor Poisson pentru componentele carteziene ale momentului cineticL = r× p pentru un punct material :
Lx = ypz − zpy
Ly = zpx − xpz
Lz = xpy − ypx
(14.54)
Folosind definitia (14.42) unde n = 3 si q1 = x , q2 = y , q3 = z , p1 = px , p2 = py , p3 = pz ,rezulta :
[ Lx, Ly ] =∂Lx
∂z
∂Ly
∂pz
− ∂Lx
∂pz
∂Ly
∂z= xpy − ypx = Lz
[ Ly, Lz ] =∂Ly
∂x
∂Lz
∂px
− ∂Ly
∂px
∂Lz
∂x= ypz − zpy = Lx
[ Lz, Lx ] =∂Lz
∂y
∂Lx
∂py
− ∂Lz
∂py
∂Lx
∂y= zpx − xpz = Ly
(14.55)
Conform teoremei Jacobi-Poisson, daca doua dintre componentele carteziene ale momen-tului cinetic sunt constante ale miscarii, atunci si cea de a treia componenta va fi tot oconstanta a miscarii. In consecinta ınsasi vectorul moment cinetic L(Lx, Ly, Lz) va trebuisa fie o constanta a miscarii. Situatia este ıntalnita, de exemplu, ın cazul miscarii punctuluiıntr-un camp central. Aplicarea ın continuare a teoremei Jacobi-Poisson nu permite con-struirea si a altor integrale prime independente (pentru un sistem cu trei grade de libertatenumarul integralelor prime independente este sase !). Intr-adevar, pornind de la Lx si Ly sepoate construi sirul :
[ Lx, Ly ] = Lz , [ Lx, [ Lx, Ly ] ] = −Ly , [ Ly, [ Lx, Ly ] ] = Lx , [ [Lx, Ly], [ Lx, Ly ] ] = 0 , . . .(14.56)
care nu aduce nimic ın plus fata de rezultatul obtinut anterior.Calculam de asemenea parantezele Poisson pentru patratul momentului cinetic si una
din componentele sale. Tinand cont de rezultatele anterioare, rezulta :
[ L2, Lk ] =
3∑
j=1
L2j , Lk
=
3∑
j=1
[ L2j , Lk ] = 2
3∑
j=1
Lj [ Lj, Lk ] = 0 ; k = 1, 2, 3 (14.57)
ceea ce confirma remarca anterioara.Rezultatele obtinute pentru parantezele Poisson ale momentului cinetic permit o inter-
pretare destul de interesanta. Astfel, dupa cum se stie, daca coodonata generalizata esteo variabila unghiulara, variatia ei descriind o rotatie ın jurul unei axe, atunci impulsul ca-nonic corespunzator reprezinta proiectia momentului cinetic pe axa respectiva. Conformrelatiilor (14.55), daca una dintre componentele momentului cinetic este aleasa ca impulscanonic, atunci orice alta componenta a sa nu va putea fi aleasa simultan drept impuls ca-nonic, deoarece paranteza lor Poisson este diferita de zero, fiind astfel contrazise parantezelefundamentale Poisson (14.48). Insa ın baza relatiilor (14.57), deoarece paranteza Poissonpentru patratul marimii momentului cinetic si una din componentele sale este nula, acesteapot fi alese simultan drept impulsuri canonice. Observatia prezinta o importanta deosebitaın mecanica cuantica.

14.3. PARANTEZELE POISSON 383
Aplicatii
1. Sa se calculeze parantezele Poisson pentru componentele carteziene ale vectorului depozitie, impulsului si momentului cinetic pentru un punct material care se misca ın camp central.Sa se arate ca ın acest caz momentul cinetic este o constanta a miscarii.
Rezolvare : Folosind definitia pentru paranteza Poisson a doua functii ϕ si ψ :
[ ϕ, ψ ] =n∑
k=1
(∂ϕ
∂qk
∂ψ
∂pk
− ∂ϕ
∂pk
∂ψ
∂qk
)(1)
pentru n = 3 si q1 = x , q2 = y , q3 = z , p1 = px , p2 = py , p3 = pz , se poate verifica directexistenta urmatoarelor relatii, indiferent de forma potentialului din care deriva campul de forte ıncare se misca puntul material :
[ x, Lx ] = 0 [ y, Lx ] = − z [ z, Lx ] = y
[ x, Ly ] = z [ y, Ly ] = 0 [ z, Ly ] = −x
[ x, Lz ] = − y [ y, Lz ] = x [ z, Lz ] = 0
(2)
respectiv :
[ px, Lx ] = 0 [ py, Lx ] = − pz [ pz, Lx ] = py
[ px, Ly ] = pz [ py, Ly ] = 0 [ pz, Ly ] = − px
[ px, Lz ] = − py [ py, Lz ] = px [ pz, Lz ] = 0
(3)
unde componentele momentului cinetic au expresiile :
Lx = ypz − zpy , Ly = zpx − xpz , Lz = xpy − ypx (4)
Relatiile (2) si (3) pot fi verificate folosind si proprietatile parantezelor Poisson precum siparantezele fundamentale. In acest caz, calculul decurge ın modul urmator :
[ x, Lx ] = [ x, ypz − zpy ] = [ x, ypz ]− [ x, zpy ] =
= [ x, y ] pz + [ x, pz ] y − [ x, z ] py − [ x, py ] z = 0(5)
s.a.m.d.In cazul miscarii punctului ıntr-un camp cu simetrie centrala, hamiltonianul are expresia :
H =1
2m
(p2
x + p2y + p2
z
)+ V (r) unde r =
√x2 + y2 + z2 (6)
Se pot verifica usor relatiile :
[ Lx, H ] = pzpy
m+ z
dV
dr
y
r− py
pz
m− y
dV
dr
z
r= 0
[ Ly, H ] = − pzpx
m− z
dV
dr
x
r+ px
pz
m+ x
dV
dr
z
r= 0
[ Lz, H ] = pypx
m+ y
dV
dr
x
r− px
py
m− x
dV
dr
y
r= 0
(7)

384 CAPITOLUL 14. ECUATIILE LUI HAMILTON
Deoarece componentele momentului cinetic nu depind explicit de timp, din relatiile (7) rezultaca acestea sunt integrale prime ale ecuatiilor de miscare. Totodata se verifica usor ca :
[ L2, H ] = [ L2x + L2
y + L2z, H ] = [ L2
x, H ] + [ L2y, H ] + [ L2
z, H ] =
= 2Lx[ Lx, H ] + 2Ly[ Ly, H ] + 2Lz[ Lz, H ] = 0(8)
deci si marimea momentului cinetic este tot o integrala prima a sistemului canonic. In consecinta,ın cazul miscarii ın camp central, vectorul moment cinetic este o constanta a miscarii, atat camarime, cat si ca orientare ın spatiu. Consecintele fizice care decurg din aceasta proprietate suntevidente : miscarea ın camp central este plana si ea se face cu viteza areolara constanta. In fondacest exercitiu a avut doar rolul de a confirma existenta acestor proprietati, folosind o metodaspecifica.
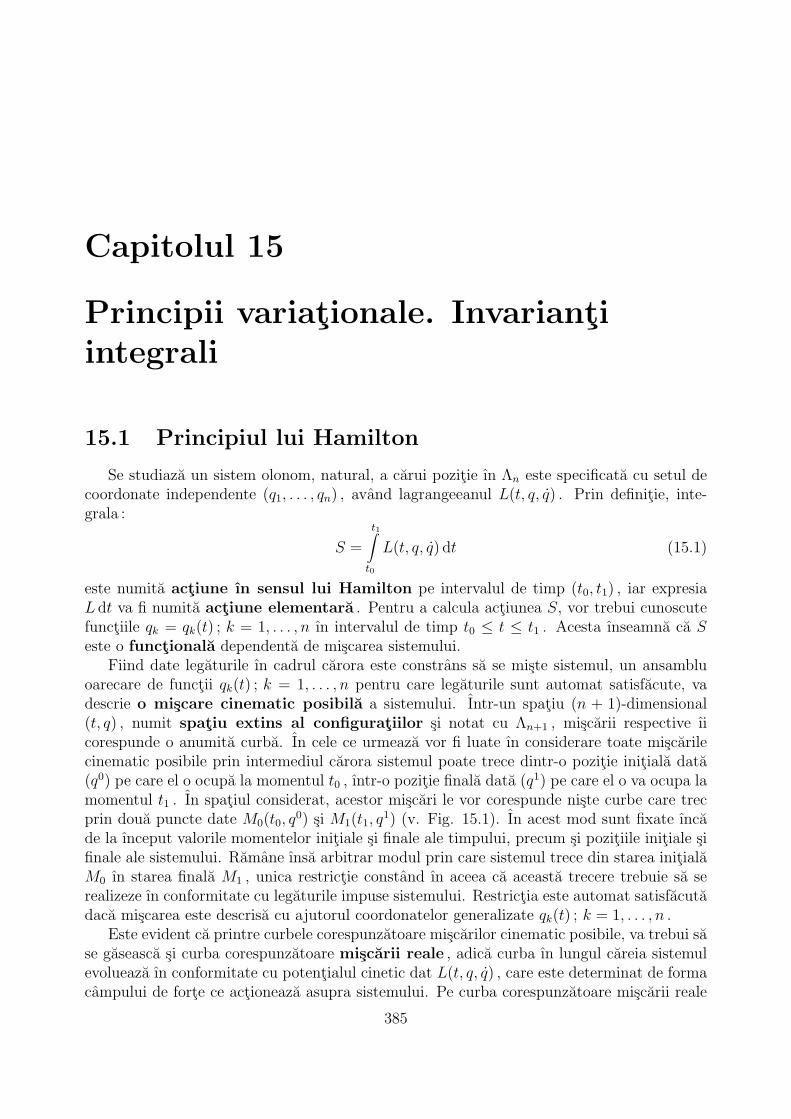
Capitolul 15
Principii variationale. Invariantiintegrali
15.1 Principiul lui Hamilton
Se studiaza un sistem olonom, natural, a carui pozitie ın Λn este specificata cu setul decoordonate independente (q1, . . . , qn) , avand lagrangeeanul L(t, q, q) . Prin definitie, inte-grala :
S =
t1∫
t0
L(t, q, q) dt (15.1)
este numita actiune ın sensul lui Hamilton pe intervalul de timp (t0, t1) , iar expresiaL dt va fi numita actiune elementara . Pentru a calcula actiunea S, vor trebui cunoscutefunctiile qk = qk(t) ; k = 1, . . . , n ın intervalul de timp t0 ≤ t ≤ t1 . Acesta ınseamna ca Seste o functionala dependenta de miscarea sistemului.
Fiind date legaturile ın cadrul carora este constrans sa se miste sistemul, un ansambluoarecare de functii qk(t) ; k = 1, . . . , n pentru care legaturile sunt automat satisfacute, vadescrie o miscare cinematic posibila a sistemului. Intr-un spatiu (n + 1)-dimensional(t, q) , numit spatiu extins al configuratiilor si notat cu Λn+1 , miscarii respective ıicorespunde o anumita curba. In cele ce urmeaza vor fi luate ın considerare toate miscarilecinematic posibile prin intermediul carora sistemul poate trece dintr-o pozitie initiala data(q0) pe care el o ocupa la momentul t0 , ıntr-o pozitie finala data (q1) pe care el o va ocupa lamomentul t1 . In spatiul considerat, acestor miscari le vor corespunde niste curbe care trecprin doua puncte date M0(t0, q
0) si M1(t1, q1) (v. Fig. 15.1). In acest mod sunt fixate ınca
de la ınceput valorile momentelor initiale si finale ale timpului, precum si pozitiile initiale sifinale ale sistemului. Ramane ınsa arbitrar modul prin care sistemul trece din starea initialaM0 ın starea finala M1 , unica restrictie constand ın aceea ca aceasta trecere trebuie sa serealizeze ın conformitate cu legaturile impuse sistemului. Restrictia este automat satisfacutadaca miscarea este descrisa cu ajutorul coordonatelor generalizate qk(t) ; k = 1, . . . , n .
Este evident ca printre curbele corespunzatoare miscarilor cinematic posibile, va trebui sase gaseasca si curba corespunzatoare miscarii reale , adica curba ın lungul careia sistemulevolueaza ın conformitate cu potentialul cinetic dat L(t, q, q) , care este determinat de formacampului de forte ce actioneaza asupra sistemului. Pe curba corespunzatoare miscarii reale
385
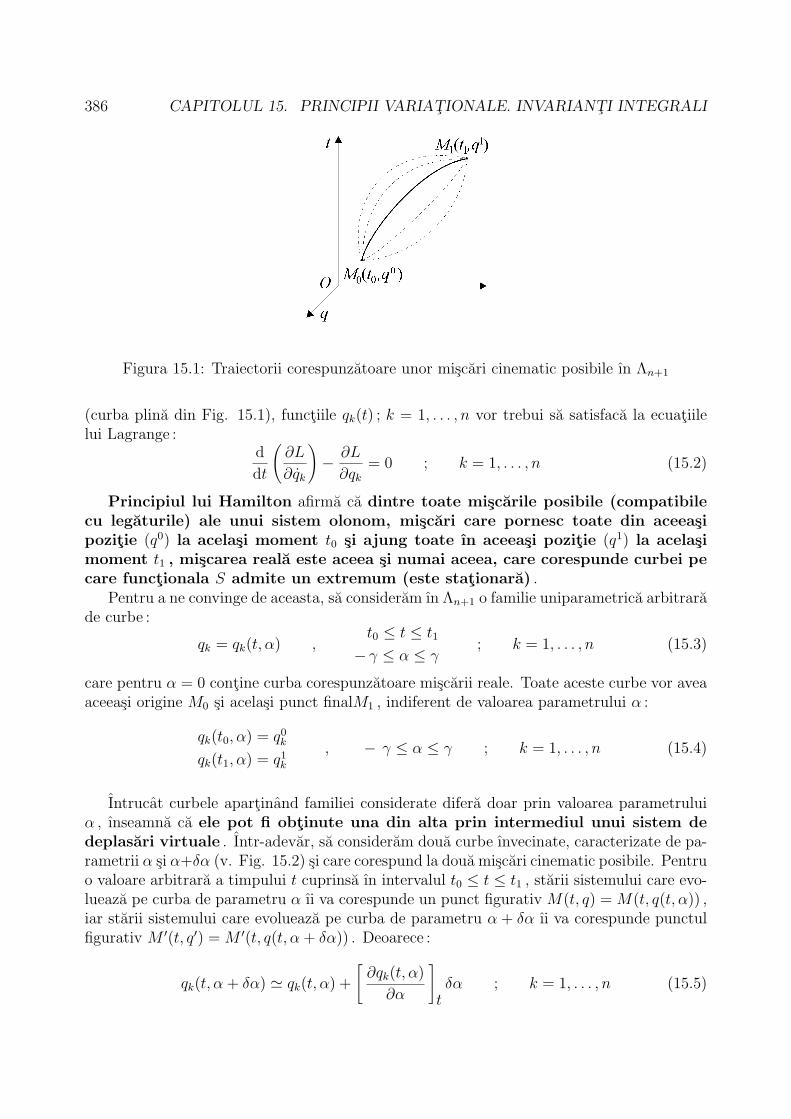
386 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Figura 15.1: Traiectorii corespunzatoare unor miscari cinematic posibile ın Λn+1
(curba plina din Fig. 15.1), functiile qk(t) ; k = 1, . . . , n vor trebui sa satisfaca la ecuatiilelui Lagrange :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= 0 ; k = 1, . . . , n (15.2)
Principiul lui Hamilton afirma ca dintre toate miscarile posibile (compatibilecu legaturile) ale unui sistem olonom, miscari care pornesc toate din aceeasipozitie (q0) la acelasi moment t0 si ajung toate ın aceeasi pozitie (q1) la acelasimoment t1 , miscarea reala este aceea si numai aceea, care corespunde curbei pecare functionala S admite un extremum (este stationara) .
Pentru a ne convinge de aceasta, sa consideram ın Λn+1 o familie uniparametrica arbitrarade curbe :
qk = qk(t, α) ,t0 ≤ t ≤ t1
− γ ≤ α ≤ γ; k = 1, . . . , n (15.3)
care pentru α = 0 contine curba corespunzatoare miscarii reale. Toate aceste curbe vor aveaaceeasi origine M0 si acelasi punct finalM1 , indiferent de valoarea parametrului α :
qk(t0, α) = q0k
qk(t1, α) = q1k
, − γ ≤ α ≤ γ ; k = 1, . . . , n (15.4)
Intrucat curbele apartinand familiei considerate difera doar prin valoarea parametruluiα , ınseamna ca ele pot fi obtinute una din alta prin intermediul unui sistem dedeplasari virtuale . Intr-adevar, sa consideram doua curbe ınvecinate, caracterizate de pa-rametrii α si α+δα (v. Fig. 15.2) si care corespund la doua miscari cinematic posibile. Pentruo valoare arbitrara a timpului t cuprinsa ın intervalul t0 ≤ t ≤ t1 , starii sistemului care evo-lueaza pe curba de parametru α ıi va corespunde un punct figurativ M(t, q) = M(t, q(t, α)) ,iar starii sistemului care evolueaza pe curba de parametru α + δα ıi va corespunde punctulfigurativ M ′(t, q′) = M ′(t, q(t, α + δα)) . Deoarece :
qk(t, α + δα) ' qk(t, α) +
[∂qk(t, α)
∂α
]
tδα ; k = 1, . . . , n (15.5)

15.1. PRINCIPIUL LUI HAMILTON 387
Figura 15.2: Doua traiectorii ınvecinate ın Λn+1
rezulta ca la momentul t , sistemul poate fi adus direct din starea posibila M ın stareaposibila ınvecinata M ′ , efectuand o deplasare infinitezimala instantanee :
(δqk)t =
[∂qk(t, α)
∂α
]
tδα ; k = 1, . . . , n (15.6)
In consecinta, admitand la fiecare moment un ansamblu de astfel de deplasari, care nu re-prezinta altceva decat niste deplasari virtuale ale sistemului, se pot obtine toate punctelecurbei de parametru α + δα din punctele corespunzatoare de pe curba de parametru α ,procedeul putand fi continuat pentru a obtine ıntreaga familie de curbe considerate. Evi-dent, miscarea punctului figurativ corespunzator unei stari posibile a sistemului pe fiecaredin aceste curbe, se face sincron . Deoarece ın acest paragraf variatiile elementare δ... aleunor marimi, atunci cand se trece de pe o curba de parametru α pe o curba ınvecinata deparametru α + δα , se calculeaza ıntotdeauna ın conditiile ın care timpul t este mentinutconstant, se va renunta la specificarea explicita (δ...)t .
Regula (15.6) ısi pastreaza valabilitatea pentru orice functie de (t, q) . O consecintadirecta este faptul ca operatorul δ , corespunzator unei variatii infinitezimale a lui α , comuta
cu operatorul de derivare dupa timpd
dt:
δqk = δd
dtqk(t, α) =
∂
∂α
[d
dtqk(t, α)
]
tδα =
d
dt
[∂
∂αqk(t, α)
]
tδα
=
d
dtδqk (15.7)
Actiunea S , calculata ın lungul unei curbe apartinand familiei considerate, va fi functiede parametrul α :
S(α) =
t1∫
t0
L[ t, q(t, α), q(t, α) ] dt (15.8)
Variatia lui S , cand se trece de pe curba de parametru α pe curba de parametru α + δα , se

388 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
evalueaza calculand diferentiala totala a expresiei (15.8) si aplicand regula descrisa anterior :
δS = S ′δα =
t1∫
t0
δL dt =
t1∫
t0
n∑
k=1
(∂L
∂qk
δqk +∂L
∂qk
δqk
)dt (15.9)
Folosind proprietatea (15.7) si integrand prin parti, se obtine ın continuare :
δS =n∑
k=1
∂L
∂qk
δqk
∣∣∣∣∣t1
t0
+
t1∫
t0
n∑
k=1
[∂L
∂qk
− d
dt
(∂L
∂qk
) ]δqk dt (15.10)
Fiind variatii cu capete fixe, din (15.4) rezulta (δqk)t0 = (δqk)t1 = 0 ; k = 1, . . . , n si primulfactor din (15.10) este nul. In consecinta :
δS =
t1∫
t0
n∑
k=1
[∂L
∂qk
− d
dt
(∂L
∂qk
) ]δqk dt (15.11)
Deoarece pe curba α = 0 corespunzatoare miscarii reale, expresiile de sub integrala suntidentic nule, sistemul evoluand ın conformitate cu ecuatiile Lagrange (15.2), din expresia(15.11) rezulta conditia necesara pentru ca actiunea S sa admita un extremum pe curbaqk = qk(t, α = 0) ; k = 1, . . . , n din Λn+1 :
δS = 0 ; α = 0 (15.12)
indiferent de sistemul de deplasari δqk ; k = 1, . . . , n . Similar ca ın analiza, conditia su-ficienta de extremum va fi furnizata de semnul variatiei de ordinul doi. Daca δ2S > 0actiunea va fi minima pe curba corespunzatoare miscarii reale, iar daca δ2S < 0 , actiuneava fi maxima pe aceeasi curba. In marea majoritate a problemelor de miscare, actiunea esteminima. Expresia (15.12) reprezinta forma matematica a principiului lui Hamilton enuntatanterior.
Afirmatia inversa este de asemenea adevarata : daca pe o anumita curba din Λn+1
se stie ca δS = 0 , atunci curba respectiva corespunde miscarii reale a sistemului .Intr-adevar, deoarece ansamblul de variatii δqk ; k = 1, . . . , n este arbitrar, unica limitarefiind ca acestea sunt nule la capete, din conditia δS = 0 si expresia (15.11) rezulta ecuatiileLagrange (15.2) la care satisfac functiile qk(t) ; k = 1, . . . , n care descriu miscarea reala.
Intrucat din principiul lui Hamilton rezulta ecuatiile Lagrange si invers, acest principiupoate fi asezat la baza dinamicii sistemelor olonome. Miscarea reala a sistemului cores-punzatoare functiei date L , poate fi caracterizata atat cu ajutorul ecuatiilor diferentiale demiscare ale lui Lagrange, cat si cu ajutorul principiului variational al lui Hamilton, ınsaıntre cele doua moduri de abordare ale problemei exista o diferenta esentiala. In timp ceprincipiul lui Hamilton are marea calitate ca ne arata ca miscarea sistemului laun moment dat este determinata de miscarea sa pe un interval finit de timp,principiile diferentiale fac sa intervina ın determinarea miscarii la un momentdat, numai miscarea din vecinatatea imediata a acestuia . Din acest motiv, o serie decapitole moderne, neclasice, ale mecanicii si nu numai ale mecanicii, ısi gasesc fundamentareanu ıntr-un principiul diferential, ci ıntr-un principiu variational (integral).

15.1. PRINCIPIUL LUI HAMILTON 389
Trebuie observat ca demonstratia principiului lui Hamilton se bazeaza pe utilizareaecuatiilor Lagrange, care la randul lor au fost deduse pornindu-se de la ecuatia generalaa dinamicii. Se poate arata usor ca ecuatia fundamentala a dinamicii conduce ın modnecesar la principiul lui Hamilton, ecuatiile lui Lagrange fiind apoi deduse ınsubsidiar din principiul astfel obtinut .
Dupa cum se stie, miscarea unui sistem material se face astfel ıncat ın orice moment siın orice pozitie compatibila cu legaturile, este ındeplinita ecuatia :
N∑
i=1
(Fi −miri) δri = 0 (15.13)
oricare ar fi deplasarea virtuala a sistemului. In spatiul fizic, punctele care alcatuiesc sis-temul pot descrie fiecare ın parte o serie de traiectorii posibile (compatibile cu legaturile),traiectoriile reale fiind cele pe care este ındeplinita ecuatia (15.13). Pentru a distinge ıntreele diferitele traiectorii posibile, poate fi ıntrodus si ın acest caz un parametru α , valoareaα = 0 corespunzand traiectoriilor reale ale punctelor ce alcatuiesc sistemul. Ecuatiile acestortraiectorii vor fi :
ri = ri(t, α) ,t0 ≤ t ≤ t1
− γ ≤ α ≤ γ; i = 1, . . . , N (15.14)
si se admite, ca si ın cazul anterior, ca pozitiile initiale si finale ale sistemului sunt fixate,adica :
ri(t0, α) = r0i
ri(t1, α) = r1i
, − γ ≤ α ≤ γ ; i = 1, . . . , N (15.15)
Energia cinetica a sistemului va fi functie de parametrul α, variatia sa la o variatie infinite-zimala a lui α fiind :
δT = δ
(1
2
N∑
i=1
mir2i
)=
N∑
i=1
miri δri =N∑
i=1
mirid
dtδri =
d
dt
(N∑
i=1
miri δri
)−
N∑
i=1
miri δri
(15.16)
In calcule s-a tinut cont de faptul ca operatorii δ sid
dtcomuta, deoarece operatia δ este
realizata ın conditiile ın care t este fixat. Din expresia precedenta rezulta ca :
−N∑
i=1
miri δri = δT − d
dt
(N∑
i=1
miri δri
)(15.17)
Efectuand un rationament analog cu cel prezentat anterior, variatiile δri ; i = 1, . . . , N potfi identificate cu sistemul arbitrar de deplasari virtuale care figureaza ın ecuatia generala adinamicii. Folosind (15.17) ecuatia generala a dinamicii (15.13) devine :
δT + δL − d
dt
(N∑
i=1
miri δri
)= 0 (15.18)
unde
δL =N∑
i=1
Fi δri =n∑
k=1
Qk δqk (15.19)

390 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
reprezinta lucrul mecanic elementar al fortelor efective la o deplasare virtuala a sistemului.Integrand (15.18) ın raport cu t de la t0 la t1 , se obtine :
t1∫
t0
(δT + δL) dt−[
N∑
i=1
miri δri
]t1
t0
= 0 (15.20)
Deoarece ın baza conditiilor (15.15), ultimul termen din membrul stang al ecuatiei obtinuteeste nul, rezulta ca :
t1∫
t0
(δT + δL) dt = 0 (15.21)
Daca fortele care actioneaza asupra sistemului deriva din potentialul V = V (t, q) , atunci :
δL = −n∑
k=1
∂V
∂qk
δqk = − δV (15.22)
Avand ın vedere ca prin definitie lagrangeeanul sistemului este L = T − V , expresia (15.21)devine :
t1∫
t0
(δT − δV ) dt =
t1∫
t0
δL dt = 0 (15.23)
In cazul unui sistem olonom se poate arata ca operatorul δ comuta cu operatorul de integraredupa timp, asa ıncat ın final rezulta :
t1∫
t0
δL dt = δ
t1∫
t0
L dt = δS = 0 (15.24)
ceea ce nu reprezinta altceva decat expresia matematica a principiului lui Hamilton .Conform celor aratate la ınceput, pentru a fi ındeplinita conditia (15.24), sistemul evolueazaın conformitate cu ecuatiile Lagrange :
d
dt
(∂L
∂qk
)− ∂L
∂qk
= 0 ; k = 1, . . . , n (15.25)
care acum sunt deduse ca o consecinta a principiului lui Hamilton, care la randul sau decurgedirect din ecuatia generala a dinamicii.
Daca fortele nu sunt potentiale, sau daca sistemul nu este olonom, atunci din ecuatiagenerala a dinamicii rezulta doar ecuatia (15.21) , asa ıncat ın astfel de situatii problemamecanica nu se reduce la o problema de calcul variational. Cu toate acestea ecuatia(15.21) permite determinarea univoca a ecuatiilor de miscare cunoscute. Astfel, folosindcoordonatele generalizate, poate fi evaluata dupa regulile cunoscute variatia energiei cineticeT (t, q, q) . Inlocuind rezultatul ın (15.21), integrand prin parti si tinand cont ca la capetevariatiile δqk ; k = 1, . . . , n sunt nule, rezulta ın final expresia :
t1∫
t0
n∑
k=1
Qk −
[d
dt
(∂T
∂qk
)− ∂T
∂qk
]δqk dt = 0 (15.26)

15.1. PRINCIPIUL LUI HAMILTON 391
Daca sistemul este olonom , variatiile δqk ; k = 1, . . . , n sunt arbitrare si parantezele desub semnul de integrare trebuie sa se anuleze simultan. Se obtin astfel ecuatiile Lagrangepentru sisteme olonome aflate ıntr-un camp de forte nepotentiale :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= Qk ; k = 1, . . . , n (15.27)
Daca sistemul este neolonom , variatiile δqk ; k = 1, . . . , n nu vor mai fi arbitrare, elesatisfacand la ecuatiile care definesc o deplasare virtuala a sistemului :
n∑
k=1
alk δqk = 0 ; l = 1, . . . , n2 (15.28)
Tinand cont de aceste ecuatii si folosind metoda cunoscuta a multiplicatorilor lui Lagrange,din (15.26) rezulta ecuatia :
t1∫
t0
n∑
k=1
Qk +
n2∑
l=1
λl alk −[
d
dt
(∂T
∂qk
)− ∂T
∂qk
]δqk dt = 0 (15.29)
Determinand din ecuatiile (15.28) un numar de n2 marimi δqk exprimate ın functie de celelalten−n2 care raman arbitrare si impunand conditia ca cei n2 multiplicatori λl sa fie determinatidin ecuatiile care se obtin prin egalarea cu zero a celor n2 coeficienti care ınmultesc variatiiledependente δqk , integrala (15.29) se reduce la o expresie ın care parantezele sunt ınmultitecu niste variatii arbitrare si care vor trebui astfel sa se anuleze simultan. In final se obtincunoscutele ecuatii ale lui Lagrange cu multiplicatori pentru sisteme neolonome :
d
dt
(∂T
∂qk
)− ∂T
∂qk
= Qk + Q′k unde Q′
k =n2∑
l=1
λl alk ; k = 1, . . . , n (15.30)
care ımpreuna cu ecuatiile legaturilorn∑
k=1
alk qk + alt = 0 ; l = 1, . . . , n2 determina complet
miscarea si reactiile legaturilor.In concluzie, pornind de la principiul lui Hamilton dedus direct din ecuatia fundamentala
a dinamicii, sau de la expresia mai generala (15.21), poate fi construit ıntreg formalismullagrangeean prezentat pe larg ın capitolele precedente.
15.1.1 Forma canonica a principiului lui Hamilton
Dupa cum s-a aratat, conform principiului lui Hamilton, miscarea unui sistem meca-
nic ıntre doua momente date t0 si t1 se face pe curba pe care functionala S =
t1∫
t0
L dt este
stationara. Aceasta constituie o proprietate intrinseca a miscarii care poate fi explicitata ınorice sistem de coordonate, deci si ın sistemul de coordonate canonice qk, pk ; k = 1, . . . , n .Pentru a gasi si ın acest caz forma matematica a principiului, vom considera un spatiu(2n + 1)-dimensional de coordonate (t, q, p) . Miscarii reale a sistemului ın intervalul finit

392 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Figura 15.3: Traiectorii corespunzatoare unor miscari cinematic posibile ın Λ2n+1
de timp t0 ≤ t ≤ t1 ıi va corespunde ın acest spatiu o curba cu extremitatile ın puncteleM0(t0, q
0, p0) si M1(t1, q1, p1) . Prin aceleasi puncte vor trece si curbele corespunzatoare ce-
lorlalte miscari cinematic posibile (v. Fig. 15.3). Pe curba corespunzatoare miscarii reale,functiile qk(t), pk(t) ; k = 1, . . . , n vor satisface la ecuatiile lui Hamilton :
qk =∂H
∂pk
, pk = − ∂H
∂qk
; k = 1, . . . , n (15.31)
Ecuatiile lui Hamilton pot fi scrise ın forma lagrangeeana, daca se introduce functia de(4n + 1) variabile independente avand expresia :
L∗(t, q, p, q, p) =n∑
k=1
pkqk −H(t, q, p) (15.32)
In aceasta situatie, ecuatiile (15.31) vor fi echivalente cu :
d
dt
(∂L∗
∂qk
)− ∂L∗
∂qk
= 0 ,d
dt
(∂L∗
∂pk
)− ∂L∗
∂pk
= 0 ; k = 1, . . . , n (15.33)
Caracterizand curba corespunzatoare miscarii reale ın spatiul (2n + 1)-dimensional cu aju-torul ecuatiilor (15.33), problema a fost adusa la o forma analoaga cu cea prezentata ınparagraful precedent. Rationand identic, va rezulta ca pe curba corespunzatoare miscarii
reale qk = qk(t, α = 0) , pk = pk(t, α = 0) ; k = 1, . . . , n din Λ2n+1 , functionala S =
t1∫
t0
L∗dt
este stationara, adica :
δS = δ
t1∫
t0
L∗dt = δ
t1∫
t0
(n∑
k=1
pkqk −H
)dt = 0 ; α = 0 (15.34)
Aceasta este expresia matematica a formei canonice a principiului lui Hamilton .Reciproca este de asemenea adevarata. Printr-un calcul asemanator cu cel din paragr. pre-cedent se verifica usor ca pe curba corespunzatoare miscarii reale sistemul evolueaza ın

15.1. PRINCIPIUL LUI HAMILTON 393
conformitate cu ecuatiile lui Hamilton. Intr-adevar :
δ
t1∫
t0
(n∑
k=1
pkqk −H
)dt =
n∑
k=1
t1∫
t0
(qk δpk + pk δqk − ∂H
∂qk
δqk − ∂H
∂pk
δpk
)dt =
=n∑
k=1
t1∫
t0
[(qk − ∂H
∂pk
)δpk −
(pk +
∂H
∂qk
)δqk
]dt = 0
(15.35)
unde
t1∫
t0
pk δqk dt = pk δqk
∣∣∣∣∣t1
t0
−t1∫
t0
pk δqk dt si (δqk)t0 = (δqk)t1 = 0 ; k = 1, . . . , n . Deoarece
variatiile δqk , δpk ; k = 1, . . . , n sunt arbitrare, din (15.35) rezulta ecuatiile (15.31).
Aplicatii
1. Un corp de masa m aruncat pe orizontala cu viteza constanta v , atinge suprafataPamantului dupa ce a strabatut distanta d . Sa se arate ca actiunea S ın sensul lui Hamiltoncalculata pe oricare din traiectoriile :
(a)
x = vt
z =gd2
2v2cos
πvt
2d
(b)
x = vt
z =gd2
2v2
[1− 1
e− 1
(e
vtd − 1
)] (c)
x = vt
z =gd2
2v2
(1− vt
d
)
este mai mare decat valoarea actiunii pe traiectoria corespunzatoare miscarii reale. Acceleratiagravitationala este g si se neglijeaza rezistenta aerului.
Rezolvare : Ecuatiile parametrice ale traiectoriei corespunzatoare miscarii reale sunt :
x = vt
z =gd2
2v2− 1
2gt2
(1)
timpul necesar parcurgerii traiectoriei fiind :
t1 =d
v(2)
Lagrangeeanul problemei este :
L = T − V =1
2m
(x2 + z2
)−mgz (3)

394 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Pe traiectoria corespunzatoare miscarii reale, lagrangeeanul are expresia :
L =1
2m
(v2 + g2t2
)− mg2d2
2v2+
mg2t2
2(4)
iar actiunea ın sensul lui Hamilton va avea valoarea :
S =
dv∫
0
L dt =mvd
2− 1
6
mg2d3
v3=
mvd
2− 0, 1(6)
mg2d3
v3(5)
Pe traiectoria (a) lagrangeeanul are expresia :
La =1
2m
(v2 +
π2g2d2
16v2sin2 πvt
2d
)− mg2d2
2v2cos
πvt
2d(6)
iar pentru actiune se obtine valoarea :
Sa =
dv∫
0
La dt =mvd
2+
(π2
64− 1
π
)mg2d3
v3=
mvd
2− 0, 1641
mg2d3
v3(7)
unde s-a folosit formula∫
sin2 x dx =x
2− sin 2x
4+ C .
Traiectoriei (b) ıi va corespunde lagrangeeanul :
Lb =1
2m
(v2 +
1
e2 − 1
g2d2
4v2e
2vtd
)− mg2d2
2v2+
mg2d2
2v2 (e− 1)
(e
vtd − 1
)(8)
iar actiunea va avea valoarea :
Sb =
dv∫
0
Lb dt =mvd
2+
[e2 − 1
16 (e− 1)2 −1
2 (e− 1)
]mg2d3
v3=
mvd
2− 0, 1557
mg2d3
v3(9)
Ecuatiile parametrice ale traiectoriei (c) corespund dreptei care uneste punctul initial cu celfinal. Lagrangeeanul va fi :
Lc =1
2m
(v2 +
g2d2
4v2
)− mg2d2
2v2+
mg2d
2vt (10)
iar pentru actiune rezulta valoarea :
Sc =
dv∫
0
Lc dt =mvd
2− 1
8
mg2d3
v3=
mvd
2− 0, 125
mg2d3
v3(11)
Comparand rezultatele (5), (7), (9), (11) si observand ca :
0, 1(6) > 0, 1641 > 0, 1557 > 0, 125 (12)

15.1. PRINCIPIUL LUI HAMILTON 395
rezulta :S < Sa < Sb < Sc (13)
ceea ce confirma principiul lui Hamilton, anume ca pe traiectoria reala functionala S atinge unextrem (ın acest caz este minima!).
2. Doua corpuri, fiecare de masa m , sunt legate ıntre ele prin intermediul unui resort avandconstanta elastica k0 . La randul lor, corpurile sunt legate lateral cu ajutorul a doua resoarteidentice avand constanta elastica k , de doua puncte fixe situate la acelasi nivel. Neglijandgreutatea si frecarile, sa se studieze miscarea sistemului folosind principiul lui Hamilton.
Rezolvare : Notand cu x1 si x2 valorile abaterilor celor doua corpuri la un moment dat ınraport cu pozitiile lor de echilibru si observand ca energia potentiala a resortului de cuplaj este
V0 =1
2k0(x2 − x1)
2, lagrangeeanul sistemului are expresia :
L = T − V =1
2m
(x2
1 + x22
)− 1
2k
(x2
1 + x22
)− 1
2k0(x2 − x1)
2 (1)
Conform principiului lui Hamilton va trebui ca :
δS =
t1∫
t0
δL dt = 0 (2)
unde :δL = mx1δx1 + mx2δx2 − kx1δx1 − kx2δx2 − k0 (x2 − x1) (δx2 − δx1) (3)
Observand ca :
mx1δx1 + mx2δx2 =d
dt(mx1δx1 + mx2δx2)−mx1δx1 −mx2δx2 (4)
din conditia (2) va rezulta :
δS = (mx1δx1 + mx2δx2)
∣∣∣∣∣t1
t0
−
−t1∫
t0
[mx1 + (k + k0) x1 − k0x2] δx1 + [mx2 − k0x1 + (k + k0) x2] δx2 dt = 0
(5)
Deoarece (δx1)t0,t1 = (δx2)t0,t1 = 0 , primul termen este nul. Ecuatiile de miscare ale sistemuluirezulta din conditia de anulare simultana a coeficientilor variatiilor δx1 si δx2 care sunt arbitrare :
x1 +k + k0
mx1 − k0
mx2 = 0
x2 − k0
mx1 +
k + k0
mx2 = 0
(6)

396 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Solutia sistemului se obtine folosind metoda cunoscuta.Cautand pe x1(t) si x2(t) sub forma :
x1(t) = C1eiωt ; x2(t) = C2e
iωt (7)
prin ınlocuire ın sistemul (6) rezulta ecuatiile pentru determinarea constantelor C1 si C2 :(
k + k0
m− ω2
)C1 − k0
mC2 = 0
− k0
mC1 +
(k + k0
m− ω2
)C2 = 0
(8)
Ecuatia caracteristica care furnizeaza valorile lui ω pentru care sistemul (8) are solutie nebanala,va avea forma :
k + k0
m− ω2 = ± k0
m(9)
de unde rezulta frecventele proprii ale sistemului de oscilatori :
ω21 =
k
m; ω2
2 =k + 2k0
m(10)
Observand ca :C1±
1 = C1±2 ; C2±
1 = −C2±2 (11)
solutia generala a sistemului de ecuatii diferentiale (6) se scrie sub forma unei suprapuneri deoscilatii armonice simple :
x1(t) = θ1(t)− θ2(t) ; x2(t) = θ1(t) + θ2(t) (12)
unde θ1 si θ2 reprezinta oscilatiile (modurile) normale :
θ1(t) = <C1+
2 eiω1t + C1−2 e−iω1t
= α1 cos(ω1t + β1)
θ2(t) = <C2+
2 eiω2t + C2−2 e−iω2t
= α2 cos(ω2t + β2)
(13)
Cele patru constante de integrare α1 , α2 , β1 , β2 urmeaza a fi determinate din conditiile initiale.
3. Sa se determine forma curbei care uneste doua puncte P0 si P1 situate ın plan vertical,asa ıncat un corp care porneste din P0 si se misca pe curba fara frecare, sa ajunga ın punctul P1
ın timpul cel mai scurt (problema brachistocronei).

15.1. PRINCIPIUL LUI HAMILTON 397
Rezolvare : Pentru comoditatea calculelor, punctul P0 se alege ın originea sistemului decoordonate. Timpul necesar parcurgerii traiectoriei va fi dat de expresia :
t =
P1∫
P0
ds
v=
P1∫
P0
√dx2 + dy2
v=
P1∫
P0
√1 + y′ 2
vdx (1)
unde s-a facut notatia :
y′ =dy
dx(2)
Viteza punctului pe curba se calculeaza din teorema conservarii energiei1
2mv2 = mgx , deci :
t =1√2g
P1∫
P0
√1 + y′ 2
xdx (3)
Va trebui determinata forma curbei P0P1 pentru care functionala (3) este minima. Deoareceextremitatile P0 si P1 sunt fixe, ecuatia curbei pe care t este minim va fi data de ecuatia Euler-Lagrange :
d
dx
∂
∂y′
√1 + y′ 2
x
− ∂
∂y
√1 + y′ 2
x
= 0 (4)
Deoarece
√1 + y′ 2
xnu depinde explicit de y , ecuatia (4) admite integrala prima :
∂
∂y′
√1 + y′ 2
x
=
1√2a
(5)
adica :y′
2
1 + y′ 2=
x
2a(6)
unde a este o constanta. Rearanjand termenii, ın final rezulta ecuatia diferentiala pentru curbacautata :
y′ =dy
dx=
√x
2a− x(7)
Pentru a obtine ecuatiile parametrice ale curbei, se face schimbarea :
x = a (1− cos θ) ,dx
dθ= a sin θ (8)
Ecuatia (7) devine :
dy
dθ=
√1− cos θ
1 + cos θ·dx
dθ= a sin θ·
sinθ
2
cosθ
2
= 2a sin2 θ
2= a (1− cos θ) (9)

398 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Prin integrare rezulta :y = y0 + a (θ − sin θ) (10)
Avand ın vedere ca punctul P0 coincide cu originea, constanta de integrare y0 este zero. Inconsecinta ecuatiile parametrice ale curbei cautate sunt :
x = a (1− cos θ)
y = a (θ − sin θ)(11)
care reprezinta o cicloida cu concavitatea ın sus. Constanta a , care reprezinta raza cercului caregenereaza cicloida, se poate determina din conditia ca curba (11) sa treaca prin punctul dat P1 .
4. Sa se determine forma de echilibru a unui fir omogen greu inextensibil si flexibil, fixat ındoua puncte date ale unui plan vertical.
Rezolvare : Deoarece unica forta care actioneaza asupra firului este greutatea, iar firul esteinextensibil, principiul deplasarilor virtuale
∑
i
Fi δri = −∑
i
mig δzi = −Mg δzc = 0 se reduce
la principiul lui Torricelli :δzc = 0 (1)
unde zc este coordonata centrului de masa al firului :
zc =1
M
P2∫
P1
z dm =ρ
M
l∫
0
z ds =ρ
M
z2∫
z1
z
√√√√1 +
(dx
dz
)2
dz (2)
Aici prin ρ s-a notat masa specifica a firului, iar M este masa lui totala. Inlocuind pe (2) ın (1)rezulta conditia de echilibru 1:
δ
z2∫
z1
z√
1 + x′ 2 dz = 0 unde x′ =dx
dz(3)
1 La conditia de echilibru (3) se mai putea ajunge si pornind de la principiul deplasarilor virtuale scris sub
forma
l∫
0
gδr ρds = 0 , unde g(0, 0,−g) este forta ce actioneaza pe unitatea de masa, ρ este masa unitatii de arc,
iar lungimea arcului se masoara ın sensul de la P1 spre P2 . Deoarece g si ρ sunt constante, conditia de echilibruse transcrie sub forma :
l∫
0
δz ds = 0
Firul fiind inextensibil, deplasarea virtuala pastreaza nemodificata lungimea elementului de arc, fiind astfel sa-

15.1. PRINCIPIUL LUI HAMILTON 399
Deoarece capetele sunt fixate, curba pe care conditia (3) este ındeplinita va satisface la ecuatiadiferentiala :
d
dz
[∂
∂x′
(z
√1 + x′ 2
)]− ∂
∂x
(z
√1 + x′ 2
)= 0 (4)
Observand ca z√
1 + x′ 2 nu depinde explicit de x , ecuatia (4) admite integrala prima :
∂
∂x′
(z
√1 + x′ 2
)= C (5)
adica :z x′√
1 + x′ 2= C (6)
unde C este o constanta. Rezolvand pe (6) ın raport cu x′ , se obtine ecuatia diferentiala :
x′ =dx
dz=
C√z2 − C2
(7)
care are integrala :
z = C chx− α
C=
C
2
(e+
x−αC + e−
x−αC
)(8)
Curba obtinuta poarta numele de lantisor . Constantele C si α se determina impunand conditiileca curba (8) sa treaca prin punctele date P1 si P2 .
tisfacuta legatura
s2∫
s1
ds = const. , unde s1 si s2 reprezinta coordonatele curbilinii ale celor doua puncte de pe
firul care are ecuatia r = r(s) . Deoarece lungimile de arc s1 si s2 nu sunt afectate de actiunea operatorului δ ,
rezulta ca δ
s2∫
s1
ds =
s2∫
s1
δds = 0 . Integrantul fiind o functie continua, va trebui ca pentru orice element de arc
sa fie ındeplinita relatia δds = 0 . Va fi astfel nula si integrala
l∫
0
z δds = 0 care adunata la conditia mentionata
anterior va conduce la o alta forma a conditiei de echilibru :
l∫
0
δz ds +
l∫
0
z δds =
l∫
0
δ (z ds) = δ
l∫
0
z ds = 0
Deoarece ds =√
dx2 + dz2 = dz
√1 +
(dx
dz
)2
, conditia de echilibru a firului capata forma :
δ
z2∫
z1
z
√1 +
(dx
dz
)2
dz = 0

400 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
15.2 Invarianti integrali
15.2.1 Variatii asincrone. Teorema Noether
In §15.1 a fost calculata variatia actiunii δS corespunzatoare trecerii de pe o curba cores-punzatoare unei miscari posibile a sistemului, pe o curba ınvecinata, ambele curbe apartinandunei familii uniparametrice arbitrare de curbe, toate avand aceeasi origine M0(t0, q
0) si acelasipunct final M1(t1, q
1) ın spatiul (n + 1)-dimensional determinat de coordonatele (t, q) . Inaceste conditii, deplasarea unui punct M corespunzator unei stari posibile a sistemului pefiecare din aceste curbe, se facea sincron.
In cele ce urmeaza va fi calculata variatia actiunii δS ın cazul general ın care originile sipunctele finale ale curbelor nu mai sunt fixate, ele fiind functii de valoarea parametrului α :
q0k = q0
k(α) , t0 = t0(α)
q1k = q1
k(α) , t1 = t1(α); k = 1, . . . , n (15.36)
In acest caz miscarea punctului corespunzator unei stari a sistemului pe curba caracterizatade parametrul α , nu se mai face sincron cu miscarea punctului corespunzator pe curbacaracterizata de parametrul α + δα . Punctului M(t, q) ıi va corespunde ın aceasta situatiepunctul M ′(t + δt, q + δq) , ceea ce ınseamna ca la trecerea pe o curba ınvecinata se vormodifica nu numai coordonatele qk ; k = 1, . . . , n , ci si timpul t , motiv pentru care va trebuiconsiderat si timpul t ca functie de parametrul α . Variatia unei coordonate qk[ t(α), α ] va fidefinita nu numai de dependenta ei explicita de α , ci si de dependenta implicita, realizataprin intermediul timpului t (v. Fig. 15.4) :
δqk = q tk δt +
[∂qk(t, α)
∂α
]
tδα = q t
k δt + (δqk)t ; k = 1, . . . , n (15.37)
unde (δqk)t reprezinta variatia calculata ın conditiile din §15.1 cand t = const. . Variatiaoricarei alte functii de variabilele (t, q) va fi calculata cu aceeasi regula (15.37).
Figura 15.4: Doua traiectorii ınvecinate ın Λn+1 avand capetele functii de valoarea lui α

15.2. INVARIANTI INTEGRALI 401
Pentru a putea calcula variatia actiunii
S(α) =
t1(α)∫
t0(α)
L[ t, q(t, α), q(t, α) ] dt (15.38)
la o variatie infinitezimala a parametrului α , limitele de integrare fiind de asemenea functiide acelasi parametru, va fi folosita regula enuntata anterior. Notand primitiva functiei L(t)cu I(t) , rezulta :
δS = δ
t1(α)∫
t0(α)
L dt = δI(t1)− δI(t0) = I(t1) δt1 − I(t0) δt0 + (δI)t1 − (δI)t0 (15.39)
adica :
δS = L1δt1−L0δt0 + δ
t1∫
t0
L dt = L1δt1−L0δt0 +
t1∫
t0
n∑
k=1
[∂L
∂qk
(δqk)t +∂L
∂qk
(δqk)t
]dt (15.40)
unde variatia integralei a fost evaluata ın conditiile din §15.1 cand timpul t este fixat, iar L1
si L0 reprezinta valorile functiei L la momentele t1 , respectiv t0 :
L1 = L[ t1, q(t1, α), q(t1, α) ] , L0 = L[ t0, q(t0, α), q(t0, α) ] (15.41)
Integrand prin parti ultimul termen din (15.40), se obtine :
δS =
[n∑
k=1
∂L
∂qk
(δqk)t + L δt
]1
0
+
t1∫
t0
n∑
k=1
[∂L
∂qk
− d
dt
(∂L
∂qk
) ](δqk)t dt (15.42)
Din expresiile (15.37) pentru variatiile coordonatelor rezulta :
(δqk)t = δqk − qk δt ; k = 1, . . . , n (15.43)
Facand aceste ınlocuiri ın (15.42) si grupand termenii, se obtine ın final :
δS =
[n∑
k=1
∂L
∂qk
δqk −(
n∑
k=1
∂L
∂qk
qk − L
)δt
]1
0
+
t1∫
t0
n∑
k=1
[∂L
∂qk
− d
dt
(∂L
∂qk
) ](δqk)t dt (15.44)
In particular, cand indiferent de valoarea parametrului α , curbele corespunzatoare de-scriu miscari reale ale sistemului, adica cand qk = qk(t, α) ; k = 1, . . . , n reprezinta o familieuniparametrica de curbe pe care sistemul evolueaza ın conformitate cu ecuatiile Lagrange,integrala care figureaza ın (15.44) este nula pentru orice α si variatia actiunii capata formasimpla :
δS =
[n∑
k=1
∂L
∂qk
δqk −(
n∑
k=1
∂L
∂qk
qk − L
)δt
]1
0
(15.45)

402 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
O transformare de simetrie este cea ın urma careia ramane nemodificata formaecuatiilor de miscare, deci care lasa invariant principiul variational al lui Hamilton. La trece-rea de pe o curba corespunzatoare unei miscari reale, pe o curba ınvecinata corespunzatoaretot unei miscari reale, va trebui ca functionala S sa ramana invarianta numeric. Teoremalui Emmy Noether stabileste ca pe solutia ecuatiilor de miscare unei transformari de si-metrie ıi corespunde ıntotdeauna o integrala prima. Facand δS = 0 ın (15.45) rezulta caaceasta integrala prima este :
n∑
k=1
∂L
∂qk
δqk −(
n∑
k=1
∂L
∂qk
qk − L
)δt = const. (15.46)
In cazul unei transformari de simetrie, conditia la care trebuie sa satisfaca lagrangeeanulproblemei se obtine prin derivarea relatiei (15.46). Obsevand ca :
δqk = qk δt + (δqk)t = qk δt +d
dt(δqk)t = qk δt +
d
dt(δqk − qk δt) =
dδqk
dt− qk
dδt
dt(15.47)
rezulta succesiv :
d
dt
(n∑
k=1
∂L
∂qk
δqk
)=
n∑
k=1
d
dt
(∂L
∂qk
)δqk +
n∑
k=1
∂L
∂qk
dδqk
dt=
=n∑
k=1
∂L
∂qk
δqk +n∑
k=1
∂L
∂qk
δqk +
(n∑
k=1
∂L
∂qk
qk
)dδt
dt
d
dt
[(n∑
k=1
∂L
∂qk
qk
)δt
]=
[n∑
k=1
d
dt
(∂L
∂qk
qk
)]δt +
(n∑
k=1
∂L
∂qk
qk
)dδt
dt(15.48)
d
dt(L δt) =
dL
dtδt + L
dδt
dt=
∂L
∂tδt +
(n∑
k=1
∂L
∂qk
qk
)δt +
(n∑
k=1
∂L
∂qk
qk
)δt + L
dδt
dt=
=∂L
∂tδt +
[n∑
k=1
d
dt
(∂L
∂qk
qk
)]δt + L
dδt
dt
Reunind rezultatele, se obtine ın final conditia cautata :
Ldδt
dt+
∂L
∂tδt +
n∑
k=1
(∂L
∂qk
δqk +∂L
∂qk
δqk
)= 0 (15.49)
Teorema poate fi verificata usor pe cazul sistemului ınchis (asupra acestuia nuactioneaza forte exterioare!) fara legaturi format din N particule, pentru care se se con-serva impulsul, momentul cinetic si energia mecanica totala. Lagrangeeanul sistemului ıncoordonate carteziene are expresia generala :
L =1
2
N∑
i=1
mi
(x2
i + y2i + z2
i
)− 1
2
N∑
i,j=1j 6=i
Vij(|ri − rj|) (15.50)
a) translatia temporala : δt = ε , δri = δri = 0 ; i = 1, . . . , N verifica conditia (15.49),deoarece lagrangeeanul nu depinde explicit de timp. Integrala prima (15.46) va fi :
N∑
i=1
(∂L
∂xi
xi +∂L
∂yi
yi +∂L
∂zi
zi
)− L = 2T − (T − V ) = T + V = h (15.51)

15.2. INVARIANTI INTEGRALI 403
deci se conserva energia mecanica totala a sistemului.b) translatia spatiala : δt = 0 , δri = ε , δri = 0 ; i = 1, . . . , N . Avand ın vedere
proprietatile de simetrie ale functiilor Vij , se verifica direct ca :
εx
N∑
i=1
∂L
∂xi
+ εy
N∑
i=1
∂L
∂yi
+ εz
N∑
i=1
∂L
∂zi
= 0 (15.52)
si astfel conditia (15.49) este verificata. Din (15.46) rezulta integrala prima :
εx
N∑
i=1
∂L
∂xi
+ εy
N∑
i=1
∂L
∂yi
+ εz
N∑
i=1
∂L
∂zi
= εx
N∑
i=1
mixi + εy
N∑
i=1
miyi + εz
N∑
i=1
mizi = ε · p = const.
(15.53)Directia ε fiind arbitrara, se conserva impulsul mecanic total al sistemului.
c) rotatia infinitezimala : δt = 0 , δri = ε× ri , δri = ε× ri ; i = 1, . . . , N . Se verificausor ca conditia (15.49) este ındeplinita, integrala prima (15.46) scriindu-se explicit :
N∑
i=1
[(εyzi − εzyi)
∂L
∂xi
+ (εzxi − εxzi)∂L
∂yi
+ (εxyi − εyxi)∂L
∂zi
]=
= εx
N∑
i=1
(yi
∂L
∂zi
− zi∂L
∂yi
)+ εy
N∑
i=1
(zi
∂L
∂xi
− xi∂L
∂zi
)+ εz
N∑
i=1
(xi
∂L
∂yi
− yi∂L
∂xi
)=
= ε ·N∑
i=1
(ri × pi) = ε · L = const.
(15.54)
Deoarece directia ε ın jurul careia se efectueaza rotatia este arbitrara, momentul cinetic totalal sistemului se conserva.
15.2.2 Invariantul integral fundamental Poincare-Cartan
Deoarece rezultatele obtinute ın §15.2.1 au un caracter intrinsec, variatia (15.45) a actiuniiS la trecerea de pe o curba corespunzatoare unei miscari reale, pe o curba ınvecinata co-respunzatoare tot unei miscari reale, poate fi scrisa ıntr-o forma mai compacta folosindcoordonate canonice :
δS =
[n∑
k=1
pk δqk −H δt
]1
0
unde H =n∑
k=1
pkqk − L (15.55)
Cele doua curbe difera prin valoarea parametrului α si capetele lor nu mai sunt aceleasi,ele corespunzand unor stari initiale si finale distincte ale sistemului mecanic. Functia H din(15.55) reprezinta ın acest caz chiar hamiltonianul sistemului.
In spatiul Λ2n+1 de coordonate (t, q, p) se considera un contur ınchis C0 avand ecuatiile :
qk = q0k(α)
pk = p0k(α)
t = t0(α)
, 0 ≤ α ≤ l ; k = 1, . . . , n (15.56)

404 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Figura 15.5: Un tub de curbe corespunzatoare unor miscari reale ın Λ2n+1
unde pentru α = 0 si α = l se obtine acelasi punct al curbei C0 (v. Fig. 15.5). Presupunandca fiecare punct al curbei C0 corespunde unei stari initiale posibile a sistemului, din fiecareastfel de punct va porni o singura curba corespunzatoare unei miscari reale, pe curbarespectiva punctul reprezentativ evoluand ın conformitate cu ecuatiile lui Hamilton. Rezultaastfel un tub de curbe corespunzatoare unor miscari reale. Ecuatiile parametrice ale curbeicare porneste din starea corespunzatoare unei anumite valori α vor fi :
qk = qk(t, α)
pk = pk(t, α), 0 ≤ α ≤ l ; k = 1, . . . , n (15.57)
si conform ipotezei facute :
qk(t, 0) = qk(t, l)
pk(t, 0) = pk(t, l); k = 1, . . . , n (15.58)
Pe acest tub se poate considera un alt contur ınchis C1 , care are cu fiecare din generatoa-rele tubului (cu fiecare curba corespunzatoare unei miscari reale), un singur punct comun.Aceasta ınseamna ca unei anumite valori α ıi corespunde un singur punct al conturului C1 ,cu exceptia valorilor α = 0 si α = 0 la care corespunde acelasi punct pe C1 . Ecuatiile acestuicontur vor fi :
qk = q1k(α)
pk = p1k(α)
t = t1(α)
, 0 ≤ α ≤ l ; k = 1, . . . , n (15.59)
Actiunea S , calculata ın lungul unei generatoare caracterizata prin parametrul α vatrebui sa fie functie de acest parametru :
S(α) =
t2(α)∫
t1(α)
L dt (15.60)
Pentru orice valoare a acestui parametru, variatia actiunii la o variatie infinitezimala a lui αva avea expresia (15.55) :
δS = S ′(α) δα =
[n∑
k=1
pk δqk −H δt
]1
0
(15.61)

15.2. INVARIANTI INTEGRALI 405
Integrand (15.61) ın raport cu α, de la α = 0 la α = l , rezulta :
l∫
0
δS = S(l)− S(0) =
l∫
0
[n∑
k=1
pk δqk −H δt
]1
0
=
=
l∫
0
[n∑
k=1
p 1k δq 1
k −H1 δt1
]−
l∫
0
[n∑
k=1
p 0k δq 0
k −H0 δt0
]=
=∮
C1
[n∑
k=1
pk δqk −H δt
]−
∮
C0
[n∑
k=1
pk δqk −H δt
]= 0 (15.62)
adica : ∮
C0
[n∑
k=1
pk δqk −H δt
]=
∮
C1
[n∑
k=1
pk δqk −H δt
](15.63)
deoarece pentru α = 0 si α = l corespunde aceeasi generatoare.In consecinta, integrala curbilinie :
I =∮
C
[n∑
k=1
pk δqk −H δt
](15.64)
calculata pe un contur ınchis arbitrar care ınconjoara tubul de curbe, nu se modifica ıncursul unei deplasari arbitrare (cu deformatie) a conturului, ın lungul tubului de curbecorespunzatoare unor miscari reale. Din acest motiv I este un invariant integral , cunoscutsi sub numele de invariantul integral Poincare-Cartan .
Poate fi demonstrata relativ usor si afirmatia reciproca , anume ca daca miscarea realaa sistemului este definita univoc de sistemul de ecuatii diferentiale :
qk = Fk(t, q, p) , pk = Gk(t, q, p) ; k = 1, . . . , n (15.65)
si daca integrala Poincare-Cartan (15.64) este un invariant integral ın raport cu curbelecorespunzatoare unor miscari reale definite de ecuatiile (15.65), atunci :
Fk(t, q, p) =∂H
∂pk
, Gk(t, q, p) = − ∂H
∂qk
; k = 1, . . . , n (15.66)
unde functia H este cea care intervine ın expresia (15.64) a lui I . Cu alte cuvinte, dacaI este un invariant integral al sistemului (15.65), atunci acesta are forma ca-nonica . Afirmatia ca I este un invariant este ınteleasa ın sensul definit anterior, anumeca integrala Poincare-Cartan, calculata pe un contur ınchis care ınconjoara tubul de curbedefinit de (15.65), nu ısi modifica valoarea cand punctele conturului de deplaseaza ın lungulgeneratoarelor tubului.
Pentru demonstratie, sa observam ca tubul de curbe considerat poate fi reprezentatparametric sub forma :
qk = qk(µ, α)
pk = pk(µ, α)
t = t (µ, α)
, 0 ≤ α ≤ l ; k = 1, . . . , n (15.67)

406 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
unde parametrul α fixeaza generatoarea, iar parametrul µ defineste un punct pe generatoarearespectiva. Intr-adevar, sistemul (15.65) se poate scrie sub forma :
dq1
F1
= · · · = dqn
Fn
=dp1
G1
= · · · = dpn
Gn
=dt
1= π(t, q, p) dµ (15.68)
unde π este o functie arbitrara de punct ın spatiul (2n + 1)-dimensional, iar µ o variabilaauxiliara. Integrand sistemul (15.68), se obtin expresiile pentru qk , pk ; k = 1, . . . , n si t cafunctii de variabila µ si de valorile initiale date q0
k , p0k ; k = 1, . . . , n si t0 (pentru µ = 0) :
qk = qk(µ; q0, p0, t0)
pk = pk(µ; q0, p0, t0)
t = t (µ; q0, p0, t0)
; k = 1, . . . , n (15.69)
Aceasta este o reprezentare parametrica a familiei de curbe integrale ale sistemului (15.65).Deoarece ne intereseaza doar acele curbe care pornesc de pe conturul ınchis dat C0 definitde ecuatiile (15.56), ınseamna ca q0
k , p0k ; k = 1, . . . , n si t0 sunt functii de parametrul α .
Facand aceste ınlocuiri ın ecuatiile (15.69) rezulta (15.67).Facand ın (15.67) µ = const. , se obtine reprezentarea parametrica a unei curbe ınchise
care ınconjoara tubul (0 ≤ α ≤ l). Inlocuind (15.67) ın (15.64), integrala Poincare-Cartandevine functie de µ si pentru fiecare valoare data a lui µ ea va reprezenta o integrala curbiliniepe conturul ınchis corespunzator lui µ = const. . Ipoteza ca I este un invariant cand µ estevariabil, revine la conditia :
dI = 0 (15.70)
unde d... indica diferentiala ın raport cu parametrul µ . Tinand cont de expresia concreta alui I , conditia de mai sus devine :
∮ [n∑
k=1
(dpk δqk + pk dδqk)− (dH δt + H dδt)
]= 0 (15.71)
Operatorii d si δ comuta, deoarece primul este un operator de diferentiere ın raport cu µ, iarcel de al doilea ın raport cu α . Facand aceasta permutare si integrand prin parti pe conturulınchis ∮ n∑
k=1
pk δdqk =∮ n∑
k=1
δ (pk dqk)−∮ n∑
k=1
dqk δpk
∮H δdt =
∮δ (Hdt)−
∮δH dt
(15.72)
rezulta : ∮ [n∑
k=1
(dpk δqk − dqk δpk)− (dH δt− δH dt)
]= 0 (15.73)
Aici s-a tinut cont de faptul ca integrala pe conturul ınchis este o integrala dupa α carevariaza ın limitele 0 ≤ α ≤ l , iar valorile functiilor de sub semnul de integrala coincid pentruα = 0 si α = l . Avand ın vedere expresia variatiei functiei H la o variatie infinitezimala aparametrului α :
δH =n∑
k=1
(∂H
∂qk
δqk +∂H
∂pk
δpk
)+
∂H
∂tδt (15.74)

15.2. INVARIANTI INTEGRALI 407
integrala (15.73) devine :∮
n∑
k=1
[(dpk +
∂H
∂qk
dt
)δqk +
(− dqk +
∂H
∂pk
dt
)δpk
]+
(− dH +
∂H
∂tdt
)δt
= 0 (15.75)
Tinand cont de sistemul (15.68) si ımpartind fiecare termen cu dµ =dt
π, se obtine ın final :
∮ n∑
k=1
[(Gk +
∂H
∂qk
)δqk +
(−Fk +
∂H
∂pk
)δpk
]+
(− dH
dt+
∂H
∂t
)δt
π = 0 (15.76)
Pentru a fi ındeplinita aceasta conditie, termenul de sub integrala trebuie sa fie o diferentialatotala exacta, oricare ar fi factorul π . Aceasta se ıntampla numai daca fiecare parantezaeste nula, deci :
Fk =∂H
∂pk
, Gk = − ∂H
∂qk
; k = 1, . . . , n (15.77)
si ın consecinta ecuatiile (15.65) vor fi ecuatiile canonice ale lui Hamilton. Se obtine deasemenea identitatea :
dH
dt=
∂H
∂t(15.78)
care dupa cum se stie reprezinta o consecinta a ecuatiilor lui Hamilton.In concluzie, invarianta integralei Poincare-Cartan constituie o conditie nece-
sara si suficienta pentru ca miscarea sistemului mecanic sa fie descrisa de ecuatiilecanonice ale lui Hamilton. Din acest motiv, invariantul integral (15.64) poate fi pus labaza mecanicii, el fiind numit si invariantul fundamental al mecanicii .
In ıncheierea acestor consideratii, trebuie observat ca ın integrala Poincare-Cartan timpult intervine ca o coordonata propriu-zisa, impulsul generalizat corespunzator fiind −H , adicaenergia sistemului luata cu semn contrar. Efectuam o schimbare de variabila ın integrala(15.64) introducand o noua variabila z , legata de vechile variabile prin relatia :
z = −H(t, q, p) (15.79)
Folosind aceasta relatie, apare posibilitatea de a exprima pe p1 sub forma :
p1 = −K(t, q1, . . . , qn, z, p2, . . . , pn) (15.80)
Construind ın analogie cu (15.64) integrala fundamentala I ın noile variabile :
I =∮
[ (z δt + p2 δq2 + · · ·+ pn δqn)−K δq1 ] (15.81)
se observa ca ın acest set de variabile I are aspectul integralei Poincare-Cartan, ınsa acumrolul timpului este preluat de variabila q1 , iar ın locul vechii energii H apare impulsul p1 luatcu semn schimbat, adica functia K . In consecinta, dupa cum s-a aratat mai sus, miscareasistemului ın noile variabile va fi descrisa de urmatorul sistem de ecuatii diferentiale, similarcu sistemul lui Hamilton :
dt
dq1
=∂K
∂z,
dqj
dq1
=∂K
∂pj
dz
dq1
= − ∂K
∂t,
dpj
dq1
= − ∂K
∂qj
; j = 2, . . . , n (15.82)
unde acum q1 reprezinta variabila independenta.

408 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
15.2.3 Invariantul integral universal Poincare
Presupunem ca conturul C din spatiul (2n + 1)-dimensional pe care se calculeaza inte-grala Poincare-Cartan (15.64), este definit de o multime de stari simultane ale sistemuluimecanic. Un astfel de contur rezulta daca tubul de curbe corespunzatoare unor miscari realeeste intersectat de un hiperplan t = const. (v. Fig. 15.6). Evident, pe un astfel de conturva trebui ca δt = 0 si invariantul fundamental (15.64) capata forma :
I1 =∮ n∑
k=1
pk δqk (15.83)
Figura 15.6: Contururi de stari simultane pe un tub de curbe care descriu miscari reale
Integrala (15.83), cunoscuta si sub numele de integrala lui Poincare , nu ısi va modi-fica valoarea ın cursul unei deplasari (cu deformatie) a conturului ın lungul tubului, unicarestrictie fiind aceea ca ın urma deplasarii, noul contur C ′ va consta dintr-o alta multime destari simultane, la un alt moment t′ .
Pentru a vedea care este interpretarea geometrica a integralei lui Poincare, este maicomod sa se lucreze ın spatiul fazelor (2n)-dimensional definit de ansamblul de coordonate(q, p) . In acest spatiu, contururilor C si C ′ le vor corespunde contururile D si D′ (v. Fig.15.7a) si ın baza proprietatii stabilite anterior, va trebui ca :
∮
D
n∑
k=1
pk δqk =∮
D′
n∑
k=1
pk δqk (15.84)
Alegand conturul D astfel ıncat punctele care ıl compun sa reprezinte starile posibile ale sis-temului la unul si acelasi moment t , atunci conturul D′ va fi definit de starile corespunzatoareale sistemului la momentul t′ .
In locul spatiului fazelor se considera un numar de n plane qk , pk ; k = 1, . . . , n . Proiectiaunui contur ınchis dat D din spatiul fazelor pe fiecare din aceste plane va reprezenta cate uncontur ınchis Dk ; k = 1, . . . , n si pentru orice k va trebui ca :
∮
D
pk δqk =∮
Dk
pk δqk = ±Sk ; k = 1, . . . , n (15.85)

15.2. INVARIANTI INTEGRALI 409
Figura 15.7: Contururi ınchise ın spatiul fazelor si ın plan
Aici Sk reprezinta aria delimitata de conturul Dk ın planul (qk, pk) . Semnul (+) va aparedaca conturul Dk este parcurs ın sensul acelor de ceasornic (v. Fig. 15.7b), ın caz contrarın expresia de mai sus figurand semnul (−) . Cu aceste rezultate, expresia lui I1 devine :
I1 =∮ n∑
k=1
pk δqk =n∑
k=1
±Sk (15.86)
In consecinta, deoarece ın cursul miscarii conturul D ısi modifica forma, se vor modifica deasemenea si ariile Sk , ınsa suma algebrica a acestor arii ramane constanta.
Dupa cum se observa, ın expresia lui I1 nu intervine structura concreta a hamiltonianuluiH . Acesta ınseamna ca invariantul Poincare I1 nu depinde de sistemul materialconcret, ci numai de forma canonica a ecuatiilor sale de miscare . Din acest motivI1 este cunoscut si sub numele de invariantul integral universal al lui Poincare. Se poatedemonstra usor afirmatia ca daca I1 este un invariant integral al sistemului :
qk = Fk(t, q, p) , pk = Gk(t, q, p) ; k = 1, . . . , n (15.87)
atunci acest sistem are forma canonica. Intr-adevar, ın acest caz se poate scrie ca :
d
dtI1 =
∮ n∑
k=1
(dpk
dtδqk + pk
d
dtδqk
)=
∮ n∑
k=1
(dpk
dtδqk + pk δ
dqk
dt
)=
= −∮ n∑
k=1
(qk δpk − pk δqk) = −∮ n∑
k=1
(Fk δpk −Gk δqk) = 0 (15.88)
unde s-a tinut cont de faptul ca operatorul δ comuta cu operatorul de derivare dupa timp sis-a efectuat integrarea prin parti. Pentru ca ecuatia de mai sus sa fie satisfacuta, expresiade sub semnul de integrare trebuie sa fie diferentiala (virtuala) totala a unei functii oarecarecare va fi notata conventional cu H(t, q, p) :
n∑
k=1
(Fk δpk −Gk δqk) = δH =n∑
k=1
(∂H
∂pk
δpk +∂H
∂qk
δqk
)(15.89)
Identificand coeficientii variatiilor δqk , δpk ; k = 1, . . . , n rezulta :
Fk =∂H
∂pk
, Gk = − ∂H
∂qk
; k = 1, . . . , n (15.90)

410 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Teorema lui Lee Hwa-Chung (1947) stabileste ca orice invariant integral universal,avand forma generala :
I ′ =∮ n∑
k=1
[ Ak(t, q, p) δqk + Bk(t, q, p) δpk ] (15.91)
difera de invariantul integral universal al lui Poincare doar printr-o constanta :
I ′ = c I1 (c = const .) (15.92)
Demonstratia teoremei va fi facuta pentru cazul particular n = 1 . Se presupune ca :
I ′ =∮
[ A(t, q, p) δq + B(t, q, p) δp ] (15.93)
este un invariant integral universal al sistemului canonic :
q =∂H
∂p, p = − ∂H
∂q(15.94)
cu H(t, q, p) o functie arbitrara. Cunoscand valorile q0 si p0 la t = t0 , solutia generala aacestui sistem se scrie :
q = q(t, q0, p0)
p = p(t, q0, p0)(15.95)
Figura 15.8: Deplasarea punctelor unui contur ınchis ın spatiul (q, p)
Se considera ın spatiul fazelor (q, p) la momentul t = t0 un contur ınchis D0 definit deecuatiile :
q = q0(α)
p = p0(α)cu 0 ≤ α ≤ l si
q0(0) = q0(l)
p0(0) = p0(l)(15.96)
La un moment ulterior t , punctele situate initial pe conturul D0 vor alcatui conturul D alecarui ecuatii parametrice sunt obtinute din (15.95) unde q0 si p0 sunt ınlocuiti prin expresiilelor (15.96) :
q = q(t, α)
p = p(t, α); 0 ≤ α ≤ l (15.97)
15.2. INVARIANTI INTEGRALI 411
Introducand aceste functii ın integrala I ′ , aceasta devine functie de parametrul t . Din
invarianta lui I ′ va rezultadI ′
dt= 0 si deci :
dI ′
dt=
∮ [dA
dtδq + A
d
dtδq +
dB
dtδp + B
d
dtδp
]= 0 (15.98)
Permutand ıntre ei operatoriid
dtsi δ si efectuand integrarea prin parti, se obtine :
∮ [dA
dtδq − δA
dq
dt+
dB
dtδp− δB
dp
dt
]= 0 (15.99)
Insa :dA
dt=
∂A
∂t+
∂A
∂qq +
∂A
∂pp ,
dB
dt=
∂B
∂t+
∂B
∂qq +
∂B
∂pp
δA =∂A
∂qδq +
∂A
∂pδp , δB =
∂B
∂qδq +
∂B
∂pδp
(15.100)
asa ıncat expresia precedenta devine :
∮ [(∂A
∂p− ∂B
∂q
)p +
∂A
∂t
]δq +
[(∂B
∂q− ∂A
∂p
)q +
∂B
∂t
]δp
= 0 (15.101)
Introducand functia Z = Z(t, q, p) prin definitia :
Z =∂A
∂p− ∂B
∂q(15.102)
se obtine ın final :
∮ [−Z
∂H
∂q+
∂A
∂t
]δq +
[−Z
∂H
∂p+
∂B
∂t
]δp
= 0 (15.103)
Intrucat aceasta integrala este nula pentru orice valoare a variabilei t considerata ca unparametru si pentru orice contur ınchis, expresia de sub integrala va trebui sa fie o diferentialatotala exacta ın raport cu variabilele q si p , deci :
∂
∂p
(−Z
∂H
∂q+
∂A
∂t
)=
∂
∂q
(−Z
∂H
∂p+
∂B
∂t
)(15.104)
In urma unor transformari elementare, aceasta conditie devine :
∂Z
∂t+
∂Z
∂q
∂H
∂p− ∂Z
∂p
∂H
∂q=
∂Z
∂t+
∂Z
∂qq +
∂Z
∂pp =
dZ
dt= 0 (15.105)
si astfel functia Z va fi o constanta :
Z =∂A
∂p− ∂B
∂q= c (15.106)

412 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Transcriind aceasta relatie sub forma :
∂ (A− cp)
∂p=
∂B
∂q(15.107)
rezulta ca exista o functie Φ = Φ(t, q, p) , ın care t joaca rolul unui parametru, asa ıncat :
δΦ =∂Φ
∂qδq +
∂Φ
∂pδp = (A− cp) δq + B δp (15.108)
Integrand aceasta relatie pe un contur ınchis, rezulta :
I ′ =∮
[ Aδq + B δp ] = c∮
p δq = c I1 (15.109)
ceea ce demonstreaza teorema. Cazul n > 1 poate fi tratat ın mod similar, ınsa calculele vorfi mai complicate.
15.2.4 Teorema lui Liouville
In ceea ce priveste terminologia matematica, trebuie amintit ca integrala Poicare-CartanI si integrala lui Poincare I1 sunt niste invarianti integrali relativi de ordinul ıntai .Ei sunt numiti relativi , deoarece domeniul de integrare este un contur ınchis si sunt deordinul ıntai , deoarece diferentialele intervin liniar ın expresiile de sub integrala.
Folosind formula lui Stokes ın spatiul (2n)-dimensional :
∮
D
2n∑
i=1
Xi δxi =∫
S
∫ ∑
i<j
(∂Xj
∂xi
− ∂Xi
∂xj
)δxi δxj (15.110)
unde D este un contur ınchis, iar S o suprafata oarecare care se sprijina pe D , se observa cainvariantul integral relativ de ordinul ıntai I1 este echivalent cu un invariant integral absolutde ordinul doi :
I1 =∮
D
n∑
k=1
pk δqk = J2 =∫
S
∫ n∑
k=1
δpk δqk (15.111)
Observatia poate fi extinsa fara a ridica probleme deosebite la invariantii universali de ordinsuperior ai sistemului canonic.
O importanta deosebita, ın special ın mecanica statistica, o prezinta invariantul inte-gral absolut de ordinul 2n :
J =∫· · ·
∫
(2n)
δq1 . . . δqn δp1 . . . δpn (15.112)
deoarece acesta reprezinta tocmai volumul unui domeniu din spatiul fazelor. Invariantaintegralei (15.112) implica invarianta volumului ın spatiul fazelor si ea poate fi demonstrata ınmodul urmator. Dupa cum se stie, ecuatiile de miscare, ca solutii ale ecuatiilor lui Hamilton,au forma generala :
qk = qk(t, q0, p0)
pk = pk(t, q0, p0)
; k = 1, . . . , n (15.113)

15.2. INVARIANTI INTEGRALI 413
unde (q0, p0) reprezinta valorile initiale ale coordonatelor canonice qk , pk ; k = 1, . . . , n lat = t0 . Se alege ın spatiul fazelor un volum oarecare D0 si se presupune ca fiecare punctreprezentativ cuprins ın acest volum corespunde unei stari initiale posibile la t = t0 . Volumulacestui domeniu va fi ;
J0 =∫· · ·
∫
︸ ︷︷ ︸D0
δq01 . . . δq0
n δp01 . . . δp0
n (15.114)
La un moment de timp ulterior t , punctele reprezentative respective vor ocupa un alt do-meniu D , ecuatiile (15.113) realizand transformarea domeniului D0 ın D . Atunci :
J =∫· · ·
∫
︸ ︷︷ ︸D
δq1 . . . δqn δp1 . . . δpn =∫· · ·
∫
︸ ︷︷ ︸D0
I δq01 . . . δq0
n δp01 . . . δp0
n (15.115)
unde I este jacobianul transformarii (15.113) :
I =∂( q , p )
∂(q0, p0)=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
∂q1
∂q01
· · · ∂q1
∂q0n
∂q1
∂p01
· · · ∂q1
∂p0n
......
......
∂qn
∂q01
· · · ∂qn
∂q0n
∂qn
∂p01
· · · ∂qn
∂p0n
∂p1
∂q01
· · · ∂p1
∂q0n
∂p1
∂p01
· · · ∂p1
∂p0n
......
......
∂pn
∂q01
· · · ∂pn
∂q0n
∂pn
∂p01
· · · ∂pn
∂p0n
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
(15.116)
Din compararea expresiilor (15.114) si (15.115) rezulta ca problema determinarii legii devariatie a lui J se reduce la gasirea legii de variatie a jacobianului I . In acest scop se cautavaloarea lui I si a derivatei sale dupa timp la un moment ales arbitrar t0 tinand cont defaptul ca valorile coordonatelor si impulsurilot la momentul t = t0 + ∆t sunt :
qk = q0k +
dqk
dt
∣∣∣∣∣t0
∆t
pk = p0k +
dpk
dt
∣∣∣∣∣t0
∆t
; k = 1, . . . , n (15.117)
unde s-au neglijat termenii mici de ordin superior. Elementele jacobianului vor fi astfel :
∂qk
∂q0j
= δkj +∂qk
∂q0j
∣∣∣∣∣t0
∆t ,∂qk
∂p0j
=∂qk
∂p0j
∣∣∣∣∣t0
∆t
∂pk
∂q0j
=∂pk
∂q0j
∣∣∣∣∣t0
∆t ,∂pk
∂p0j
= δkj +∂pk
∂p0j
∣∣∣∣∣t0
∆t
; k, j = 1, . . . , n (15.118)
414 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
Introducand aceste expresii ın jacobian, se obtine valoarea sa exacta I(t0) si valoarea saaproximativa I(t0 + ∆t) ın aproximatia de ordinul ıntai :
I(t0) = 1 , I(t0 + ∆t) = 1 +n∑
k=1
[∂qk
∂q0k
+∂pk
∂p0k
]
t0
∆t (15.119)
Derivata jacobianului la momentul t = t0 rezulta prin trecere la limita :
dI
dt
∣∣∣∣∣t0
= lim∆t→0
I(t0 + ∆t)− I(t0)
∆t=
n∑
k=1
[∂qk
∂q0k
+∂pk
∂p0k
]
t0
(15.120)
Deoarece pe traiectoriile din spatiul fazelor sunt ındeplinite ecuatiile lui Hamilton, ultimaexpresie devine :
dI
dt
∣∣∣∣∣t0
=n∑
k=1
[∂
∂q0k
(∂H0
∂p0k
)− ∂
∂p0k
(∂H0
∂q0k
)]=
n∑
k=1
[∂2H0
∂q0k∂p0
k
− ∂2H0
∂p0k∂q0
k
]= 0 (15.121)
Momentul t0 fiind ales arbitrar, rezulta cadI
dt= 0 pentru orice t , si deci va fi nula si derivata
volumului ın spatiul fazelor :
dJ
dt=
∫· · ·
∫
︸ ︷︷ ︸D0
dI
dtδq0
1 . . . δq0n δp0
1 . . . δp0n = 0 (15.122)
In consecinta, volumul unui domeniu de stari posibile simultane ale sistemuluiramane constant ın cursul miscarii . In plus, din (15.119) rezulta ca valoarea jacobia-nului la orice moment de timp este :
I = 1 (15.123)
Din invarianta volumului ın spatiul fazelor rezulta teorema lui Liouville care sta labaza mecanicii statistice .
Dupa cum s-a vazut, legile mecanicii permit ın principiu determinarea ın ıntregime amiscarii unui sistem mecanic daca se cunosc conditiile initiale. Insa ın cazul sistemelorfoarte complexe, compuse dintr-un numar foarte mare de particule (de exemplu un gaz careocupa un volum dat), apar doua dificultati majore. Una dintre dificultati este de naturamatematica, fiind practic imposibil sa se determine miscarea individuala a fiecarei particuleın parte. Alta dificultate este legata de faptul ca conditiile initiale ale unui astfel de sistemnu vor fi niciodata cunoscute ın ıntregime. Astfel, studiind starea unui gaz la momentult = t0 se va putea eventual afirma ca energia gazului are o valoare bine determinata, ınsanu se va putea spune nimic despre valorile coordonatelor si vitezelor moleculelor individualeale gazului, deoarece pot exista o multime de configuratii cu valori diferite ale vitezelor, decio multime de stari posibile ale sistemului, care sa corespunda aceleiasi valori ale energiei.De studiul evolutiei ın timp a unui astfel de sistem se ocupa mecanica statistica, care nu ısipropune rezolvarea exacta a problemei determinarii miscarii, ci elaborarea unei metode decalcul ale unor marimi medii care caracterizeaza un ansamblu de stari posibile simultane alesistemului.

15.2. INVARIANTI INTEGRALI 415
Deoarece fiecarei stari posibile a sistemului ıi corespunde ın spatiul fazelor un punct re-prezentativ, ansamblului de stari posibile simultane ale sistemului ıi va corespunde o multimeoarecare de puncte reprezentative. Admitand ca aceasta multime este continua, va puteafi definita ın vecinatatea fiecarui punct din spatiul fazelor o densitate de puncte reprezen-tative. In cursul miscarii, punctele reprezentative se vor deplasa ın lungul traiectoriilorcorespunzatoare. Teorema lui Liouville afirma ca densitatea de puncte reprezenta-tive la un moment initial ın vecinatatea unui punct initial, are aceeasi valoarela un moment final oarecare ın vecinatatea punctului rezultat prin deplasareapunctului initial ın lungul traiectoriei sale .
Figura 15.9: Deplasarea unui punct reprezentativ ın spatiul fazelor
Pentru demonstrarea teoremei, se considera ın spatiul fazelor un punct M0(q0, p0) si ın
jurul acestui punct un volum infinitezimal dV0 , care contine un numar dN de puncte repre-zentative corespunzatoare unor stari posibile ale sistemului la momentul initial t0 . Densitateade puncte reprezentative ın vecinatatea punctului M0 va fi :
ρ(t0, q0, p0) =
dN
dV0
(15.124)
Pe masura ce sistemul evolueaza ın timp, punctul M0 ajunge ın punctul Mt(qt, pt) si toate
punctele reprezentative aflate initial ın dV0 , vor fi continute ın volumul dVt . In vecinatateapunctului Mt , densitatea de puncte reprezentative va fi :
ρ(t, qt, pt) =dN
dVt
(15.125)
Deoarece volumul din spatiul fazelor este invariant ın cursul miscarii dV0 = dVt , rezulta caρ(t0, q
0, p0) = ρ(t, qt, pt) si astfel teorema lui Liouville este demonstrata. Din punct de vederematematic aceasta ınseamna ca :
dρ
dt=
∂ρ
∂t+
n∑
k=1
(∂ρ
∂qk
qk +∂ρ
∂pk
pk
)=
∂ρ
∂t+ [ ρ,H ] = 0 (15.126)
adica functia ρ(t, q, p) este o integrala prima a ecuatiilor de miscare. Se observa simili-
tudinea relatiei obtinute cu ecuatia de continuitate a unui fluid incompresibildρ
dt= 0 sau

416 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
∂ρ
∂t+ (v · grad) ρ = 0 , deoarece ın aceasta situatie :
div v =n∑
k=1
(∂
∂qk
qk +∂
∂pk
pk
)=
n∑
k=1
(∂2H
∂qk∂pk
− ∂2H
∂pk∂qk
)= 0 (15.127)
asa ıncat miscarea ansamblului de puncte reprezentative ın spatiul fazelor poate fi privita cao curgere a unui fluid incompresibil.
Termenul∂ρ
∂tcorespunde variatiei locale (ıntr-un punct dat al spatiului fazelor) a functiei
ρ , iar termenul [ ρ,H ] se datoreste faptului ca elementul considerat ısi modifica pozitia ıncursul evolutiei ansamblului.
Daca starea sistemului este o stare de echilibru statistic , ceea ce corespunde situatieiın care valoarea medie a unei marimi mecanice calculata pe toate starile simultane posibile
este o constanta, atunci variatia locala a functiei ρ este nula :∂ρ
∂t= 0 . In consecinta, conditia
de echilibru statistic va fi echivalenta cu egalitatea :
[ ρ,H ] = 0 (15.128)
In cazul unui sistem conservativ, paranteza Poisson [ ρ, H ] este nula daca ρ este o functie oa-recare de energia sistemului ρ = ρ(H) si atunci conditia de echilibru statistic este ındeplinitaın mod obligator. Forma aleasa pentru functia ρ = ρ(H) va determina caracteristicile an-samblului de stari posibile simultane ale sistemului considerat.
15.3 Principiul minimei actiuni
Este studiat un sistem mecanic arbitrar al carui hamiltonian H nu depinde explicit detimp. Dupa cum s-a vazut, un astfel de sistem este caracterizat prin aceea ca energia sa
H(q, p) = h (15.129)
este o integrala prima a ecuatiilor de miscare, constanta h fiind fixata prin conditiile initialeH(q0, p0) = h . In cele ce urmeaza vor fi luate ın considerare ın spatiul fazelor (2n)-dimensional doar punctele ale caror coordonate satisfac ecuatia (15.129), adica studiul vafi limitat doar la starile posibile ale sistemului caracterizate prin aceeasi energietotala . In aceste conditii, invariantul integral Poincare-Cartan devine :
I =∮ n∑
k=1
pk δqk (15.130)
deoarece ın baza ecuatiilor (15.129) rezulta :∮
H δt = h∮
δt = 0 (15.131)
Rezolvand ecuatia (15.129) ın raport cu unul din impulsuri, de exemplu p1 :
p1 = −K(q1, . . . , qn, p2, . . . , pn, h) (15.132)

15.3. PRINCIPIUL MINIMEI ACTIUNI 417
si introducand aceasta expresie ın integrala (15.130), se obtine :
I =∮
n∑
j=2
pj δqj −K δq1
(15.133)
Se observa ca invariantul integral (15.133) are forma integralei Poincare-Cartan daca ıncalitate de coordonate si impulsuri se aleg variabilele qj , pj ; j = 2, . . . , n , rolul timpuluifiind jucat de variabila q1 , functia K fiind ”noul” hamiltonian. Din acest motiv miscareasistemului va fi descrisa de urmatorul sistem de (2n− 1) ecuatii diferentiale de ordinul ıntai(v. (15.82)) :
dqj
dq1
=∂K
∂pj
,dpj
dq1
= − ∂K
∂qj
; j = 2, . . . , n (15.134)
Acestea sunt cunoscute sub numele de ecuatiile lui Whittaker . Integrand acest sistemde ecuatii rezulta qj , pj ; j = 2, . . . , n ca functii de q1 , de (2n− 2) constante arbitrare si deconstanta h care intervine ın expresia lui K :
qj = qj(q1, h, c1, . . . , c2n−2)
pj = pj(q1, h, c1, . . . , c2n−2) ; j = 2, . . . , n(15.135)
Introducand aceste expresii ın (15.132), se obtine pentru p1 o expresie analoaga :
p1 = p1(q1, h, c1, . . . , c2n−2) (15.136)
Ecuatiile (15.135) si (15.136) vor descrie toate traiectoriile izoenergetice posibile din spatiulfazelor. Pentru a obtine dependenta explicita de timp a acestor variabile, va fi folosita ecuatia
q1 =∂H
∂p1
care stabileste legatura dintre q1 si t si care prin integrare conduce la expresia :
t =∫ dq1
∂H
∂p1
+ c2n−1 (15.137)
Pentru a efectua aceasta integrare vor trebui exprimate toate variabilele care figureaza ın∂H
∂p1
ın functie de variabila q1 , folosind ecuatiile (15.135) si (15.136).
Ecuatiile lui Whittaker, avand forma sistemului canonic, pot fi ınlocuite cu un sistemechivalent avand forma ecuatiilor Lagrange. Facand notatiile :
q′j =dqj
dq1
; j = 2, . . . , n (15.138)
si introducand o functie P (analoaga cu functia lui Lagrange) care este legata de functia K(analoaga cu functia lui Hamilton) prin relatia :
P = P (q1, . . . , qn, q′2, . . . , q
′n) =
n∑
j=2
_pj q′j−
_K (15.139)

418 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
sistemul (15.134) va fi echivalent cu urmatorul sistem de (n−1) ecuatii diferentiale de ordinuldoi :
d
dq1
(∂P
∂q′j
)− ∂P
∂qj
= 0 ; j = 2, . . . , n (15.140)
Impulsurile pj ; j = 2, . . . , n care figureaza ın membrul drept al definitiei (15.139) vor trebuisa fie ınlocuite cu expresiile lor ın functie de q′j ; j = 2, . . . , n si care pot fi obtinute dinprimele (n− 1) ecuatii ale sistemului (15.134).
Tinand cont de (15.132), expresia functiei P devine :
P =n∑
j=2
pjq′j + p1 =
1
q1
n∑
k=1
pkqk =1
q1
(L + H) (15.141)
Daca sistemul este conservativ , deoarece L = T − V si H = T + V , expresia de mai suscapata forma mai simpla :
P =2T
q1
(15.142)
unde :
T =1
2
n∑
k,j=1
akj qkqj = q21
1
2
n∑
k,j=1
akjq′kq′j = q2
1 G (15.143)
si s-a facut notatia :
G(q1, . . . , qn, q′2, . . . , q′n) =
1
2
n∑
k,j=1
akj(q1, . . . , qn)q′kq′j , q′1 = 1 (15.144)
O alta expresie a functiei P pentru sisteme conservative se obtine observand ca din (15.143)rezulta :
q1 =
√T
G=
√h− V
G(15.145)
si atunci (15.142) devine :
P = 2q1G = 2√
G (h− V ) (15.146)
Ecuatiile diferentiale (15.140) ın care functia P are forma (15.146) si deci care se referanumai la sisteme conservative sunt cunoscute sub numele de ecuatiile lui Jacobi . Solutiileecuatiilor lui Jacobi vor reprezenta ecuatiile tuturor traiectoriilor izoenergetice posibile ınspatiul configuratiilor (q1, . . . , qn) :
qj = qj(q1, h, c1, . . . , c2n−2) ; j = 2, . . . , n (15.147)
Dependenta explicita de timp a acestor coordonate va fi determinata folosind ecuatia (15.145)care prin integrare conduce la relatia :
t =∫ √
G
h− Vdq1 + c2n−1 (15.148)
care stabileste dependenta dintre q1 si t . Astfel, problema determinarii miscarii este formalrezolvata.

15.3. PRINCIPIUL MINIMEI ACTIUNI 419
In concluzie, s-a stabilit ca miscarea unui sistem a carui hamiltonian nu depinde explicitde timp, poate fi descrisa cu ajutorul ecuatiilor (15.140) care au forma ecuatiilor Lagrange,functia care joaca rolul lagrangeeanului fiind definita cu relatia (15.139) . In aceasta situatieva putea fi definita functionala :
W =
q11∫
q01
P dq1 (15.149)
numita actiune ın sensul lui Lagrange , care depinde de miscarea prin intermediul careiasistemul este transferat dintr-o pozitie initiala fixata q0
k ; k = 1, . . . , n ın pozitia finala fixataq1k ; k = 1, . . . , n . Deoarece toate aceste miscari posibile sunt izoenergetice, momentele de
timp t0 si t1 nu mai sunt fixate, ele putand varia la trecerea de pe o curba corespunzatoareunei miscari posibile, pe alta curba corespunzatoare unei miscari izoenergetice ınvecinate.Evident, pe curba corespunzatoare miscarii reale, deci pe care sunt ındeplinite ecuatiile(15.140), actiunea W va admite un extremum.
Figura 15.10: Traiectorii corespunzatoare unor miscari izoenergetice posibile ın Λn
Se poate astfel enunta principiul minimei actiuni a lui Maupertuis-Lagrange ,conform caruia dintre toate miscarile izoenergetice posibile ale unui sistem, carepornesc din punctul M0(q
0) si ajung ın punctul ın punctul M1(q1) , miscarea reala
va fi aceea pe care functionala W (15.149) este stationara :
δW = 0 (15.150)
Legatura dintre actiunea lagrangeeana si actiunea hamiltoniana poate fi stabilita usorpornind de la expresia (15.141) a functiei P . Astfel :
W =
q11∫
q01
P dq1 =
t1∫
t0
(L + H) dt =
t1∫
t0
L dt + h
t1∫
t0
dt = S + h (t1 − t0) (15.151)
Daca sistemul este conservativ , functia P are forma (15.142) si actiunea lagrangeeanava avea expresia :
W = 2
t1∫
t0
T dt =
t1∫
t0
N∑
i=1
miv2i dt =
N∑
i=1
s1i∫
s0i
mivi dsi (15.152)

420 CAPITOLUL 15. PRINCIPII VARIATIONALE. INVARIANTI INTEGRALI
unde si reprezinta abscisa curbilinie a punctului Pi pe traiectoria sa. Astfel, ın cazul unuisistem conservativ, actiunea lagrangeeana reprezinta lucrul mecanic total al impulsurilorpunctelor care alcatuiesc sistemul, la o deplasare corespunzatoare a sistemului respectivıntre doua pozitii date. Aceasta este expresia actiunii ın forma data de Maupertuis .
O alta forma a actiunii pentru un sistem conservativ se obtine eliminand ın (15.152)timpul cu ajutorul teoremei energiei T + V = h . In acest scop, se va arata mai ıntai caenergia cinetica a unui sistem coincide cu energia cinetica a punctului figurativ ın spatiulΛn al configuratiilor, daca se asociaza punctului masa unitate. Intr-adevar, introducand ınspatiul configuratiilor (q1, . . . , qn) metrica :
ds2 =n∑
k,j=1
akj dqkdqj (15.153)
unde akj = akj(q1, . . . , qn) , akj = ajk ; k.j = 1, . . . , n , atunci lungimea arcului de curba careuneste doua puncte date (q0) si (q1) va fi data de expresia :
s =
(q1)∫
(q0)
ds =
(q1)∫
(q0)
√√√√n∑
k,j=1
akj dqkdqj (15.154)
Identificand coeficientii formei patratice (15.153) cu coeficientii care intervin ın expresiaenergiei cinetice pentru un sistem scleronom, rezulta :
T =1
2
n∑
k,j=1
akj qkqj =1
2
(ds
dt
)2
(15.155)
Scotand din aceasta relatie pe dt si folosind teorema energiei, actiunea W devine :
W =
s1∫
s0
√2T ds =
√2
(q1)∫
(q0)
√√√√(h− V )n∑
k,j=1
akj dqkdqj (15.156)
Aceasta este expresia actiunii ın forma data de Jacobi si ea are un caracter pur geometric,deoarece ın ea nu intervin timpul si viteza.
In particular, daca sistemul se gaseste ın miscare inertiala (V = 0), atunci T = h siactiunea va avea forma :
W =√
2h
s1∫
s0
ds =√
2h
(q1)∫
(q0)
√√√√n∑
k,j=1
akj dqkdqj (15.157)
In baza principiului minimei actiuni, punctul figurativ se va misca uniform pe curba dinspatiul configuratiilor pentru care :
δ
(q1)∫
(q0)
√√√√n∑
k,j=1
akj dqkdqj = 0 (15.158)

15.3. PRINCIPIUL MINIMEI ACTIUNI 421
adica pe geodezica spatiului avand metrica (15.153) si care trece prin punctele (q0) si(q1) . Daca asupra sistemului actioneaza forte care deriva din potentalul V = V (q) , atunciactiunea are forma (15.156) si punctul figurativ se va misca pe curba pentru care :
δ
(q1)∫
(q0)
√√√√(h− V )n∑
k,j=1
akj dqkdqj = 0 (15.159)
Din compararea ultimelor doua expresii rezulta ca si ın cazul sistemelor conservative, traiec-toria reala este o geodezica a unui spatiu, care are ınsa metrica :
ds21 = (h− V )
n∑
k,j=1
akj dqkdqj (15.160)
Deoarece principiul minimei actiuni ın forma lui Jacobi (15.159) nu contine explicit tim-pul, el are avantajul ca permite obtinerea directa a ecuatiei diferentiale a traiectorieisistemului considerat. Astfel, ın cazul unui punct material liber, principiul (15.159) se scrie :
δ
(r1)∫
(r0)
√h− V ds =
(r1)∫
(r0)
(√h− V δds− ∇V · δr
2√
h− Vds
)= 0 (15.161)
unde (ds)2 = (dr)2 si deci ds · δds = dr · δdr . Facand schimbarea δdr = dδr , integrand prinparti si tinand cont ca δr se anuleaza la capete, rezulta :
(r1)∫
(r0)
[d
ds
(√h− V
dr
ds
)+
∇V
2√
h− V
]ds δr = 0 (15.162)
Deoarece variatiile δr sunt arbitrare, din aceasta conditie integrala rezulta ecuatia diferentialaa traiectoriei :
d
ds
(√h− V
dr
ds
)+
1
2√
h− V∇V = 0 (15.163)
Se poate verifica usor ca aceasta coincide cu ecuatia lui Newton mr = −∇V , deoarece din
integrala energiei1
2m
(ds
dt
)2
+ V = h rezulta ca :
d
ds=
√m
2 (h− V )· d
dt(15.164)
Capitolul 16
Integrarea sistemului canonic
16.1 Transformari canonice
16.1.1 Ecuatiile transformarilor canonice
Dupa cum s-a observat, existenta variabilelor ciclice simplifica considerabil problemadeterminarii miscarii unui sistem mecanic. Daca ın particular toate coordonatele generalizateqk ; k = 1, . . . , n ar fi ciclice, atunci toate impulsurile generalizate corespunzatoare ar fi nisteconstante pk = bk ; k = 1, . . . , n , integrarea sistemului canonic reducandu-se la calculul unorintegrale de forma :
qk =∫ ∂H
∂bk
dt + ak ; k = 1, . . . , n (16.1)
unde H = H(t, b1, . . . , bn) este hamiltonianul sistemului, iar ak ; k = 1, . . . , n sunt constantede integrare care pot fi determinate din conditiile initiale.
Problema pusa ın acest mod nu prezinta un avantaj practic deosebit, deoarece este putinprobabil ca toate coordonatele generalizate ale unui sistem mecanic sa fie ciclice. Deoareceınsa setul de coordonate generalizate cu ajutorul caruia este descrisa miscarea sistemului nueste determinat ın mod univoc, are sens sa se puna problema elaborarii unui procedeu generalcare sa permita trecerea de la un sistem de coordonate la altul, care sa fie mai convenabilpentru determinarea miscarii. De exemplu, problema determinarii miscarii ın camp centralfolosind coordonate carteziene x, y conduce la complicatii matematice deosebite, mai alesca nici una dintre coordonate nu este ciclica, ın schimb rezolvarea aceleiasi probleme ıncoordonate polare r, θ se face relativ usor, deoarece ın acest caz coordonata θ este ciclica,ceea ce furnizeaza deja unele informatii privind proprietatile miscarii. Daca ın particular, ınurma transformarii, noile coordonate sunt toate ciclice, rezolvarea ın continuare a problemeipoate deveni banala.
In spatiul configuratiilor Λn al lui Lagrange, o transformare de coordonate este definitade sistemul de ecuatii :
Qk = Qk(t, q) , det
(∂Qk
∂qj
)6= 0 ; k, j = 1, . . . , n (16.2)
si dupa cum se stie, la o astfel de transformare ecuatiile Lagrange ısi pastreaza forma. Trans-formarile definite de ecuatiile (16.2) poarta numele de transformari punctuale , deoarece
422

16.1. TRANSFORMARI CANONICE 423
ansamblul de coordonate (Q) si ansamblul de coordonate (q) definesc acelasi punct ın Λn .In spatiul fazelor Λ2n , pe langa cele n coordonate generalizate, fiind considerate ca varia-
bile independente si cele n impulsuri generalizate, conceptul de transformare a coordonatelorva trebui sa fie extins, asa ıncat acesta sa includa transformarea simultana atat a coordona-telor generalizate qk ; k = 1, . . . , n , cat si a impulsurilor generalizate pk ; k = 1, . . . , n .
Transformarea simultana a coordonatelor si impulsurilor generalizate, definitade ecuatiile :
Qk = Qk(t, q, p)
Pk = Pk(t, q, p); k = 1, . . . , n ,
∂(Q, P )
∂( q , p )6= 0 (16.3)
va fi numita canonica, daca ın urma ei un sistem canonic caracterizat de hamil-tonianul H = H(t, q, p) :
qk =∂H
∂pk
, pk = − ∂H
∂qk
; k = 1, . . . , n (16.4)
se transforma tot ıntr-un sistem canonic :
Qk =∂K
∂Pk
, Pk = − ∂K
∂Qk
; k = 1, . . . , n (16.5)
unde K = K(t, Q, P ) este o functie de noile variabile, care acum joaca rolul dehamiltonian.
Aplicand aceasta metoda, este posibil sa se treaca de la sisteme canonice complicate, lasisteme canonice mult mai simple. Daca ın particular, ın urma unei astfel de transformari,noul hamiltonian este identic nul (K = 0) , atunci Qk = Ak , Pk = Bk ; k = 1, . . . , n sifunctiile (16.3) vor fi integrale prime ale sistemului canonic (16.4).
Se poate demonstra ca daca ın spatiul fazelor sunt efectuate succesiv doua transformaricanonice, atunci transformarea obtinuta este tot canonica. De asemenea, inversa uneitransformari canonice este tot canonica, iar transformarea identica este si ea canonica. Inconsecinta multimea transformarilor canonice constituie un grup .
Figura 16.1: O transformare canonica a spatiului extins al fazelor Λ2n+1

424 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Pentru a gasi conditiile ın care transformarea (16.3) este canonica, se considera douaspatii (2n + 1)-dimensionale, definite de coordonatele (t, q, p) si (t, Q, P ) , unul trecand ıncelalalt ın urma transformarii (16.3). Se considera de asemenea doua tuburi de curbe cores-punzatoare unor miscari reale, pe care sunt ındeplinite ecuatiile (16.4) si (16.5). In urmatransformarii (16.3), un contur ınchis arbitrar C trece ın conturul ınchis C (v. Fig. 16.1) siinvers. Intersectiile celor doua tuburi cu unul si acelasi hiperplan t = const. , vor reprezentade asemenea doua contururi ınchise C0 si C0 , care trec unul ın celalalt prin intermediultransformarii (16.3). Din invarianta integralei Poincare-Cartan rezulta :
∮
C
[n∑
k=1
pk δqk −H δt
]=
∮
C0
n∑
k=1
pk δqk (16.6)
∮
C
[n∑
k=1
Pk δQk −K δt
]=
∮
C0
n∑
k=1
Pk δQk (16.7)
Folosind succesiv transformarea (16.3) si teorema Lee Hwa-Chung, ultima integrala din (16.7)se poate scrie sub forma :
∮
C0
n∑
k=1
Pk δQk =∮
C0
n∑
k=1
[ Ak(t, q, p) δqk + Bk(t, q, p) δpk ] = c∮
C0
n∑
k=1
pk δqk (16.8)
une c este o constanta. Tinand cont de (16.6), pentru membrul stang din (16.7) va rezultaexpresia : ∮
C
[n∑
k=1
Pk δQk −K δt
]= c
∮
C
[n∑
k=1
pk δqk −H δt
](16.9)
Folosind din nou transformarea (16.3), coordonatele (Q,P ) pot fi exprimate prin coordo-natele (q, p), iar conturul C va trece ın conturul C . In aceasta situatie, identitatea (16.9)devine : ∮
C
[n∑
k=1
Pk δQk −K δt
]− c
[n∑
k=1
pk δqk −H δt
]= 0 (16.10)
Deoarece conturul C este ales arbitrar, va trebui ca expresia de sub integrala sa fie diferentialatotala exacta a unei functii oarecare, care va fi notata cu −S(t, q, p) :
n∑
k=1
Pk δQk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS (16.11)
Constanta c va trebui sa fie obligator diferita de zero : c 6= 0 , deoarece expresia din membrulstang al identitatii (16.11) nu este ın general o diferentiala totala exacta si deci nu poatefi identificata cu − δS . Functia S poarta numele de functie generatoare a transformariicanonice (16.3), iar constanta c 6= 0 reprezinta valenta transformarii respective. O transfor-mare canonica pentru care c = 1 poarta numele de transformare canonica univalenta .
Deoarece identitatile (16.6) si (16.7) de la care s-a pornit reprezinta conditiile necesaresi suficiente pentru ca ecuatiile de miscare ın variabilelele (q, p) si respectiv (Q, P ) sa fiecanonice, rezulta ca conditia necesara si suficienta pentru ca transformarea (16.3)

16.1. TRANSFORMARI CANONICE 425
sa fie canonica, consta ın existenta unei functii generatoare S si a unei constanteoarecare c 6= 0, pentru care ecuatia (16.11) sa fie satisfacuta identic ın bazatransformarii (16.3) . Cu alte cuvinte, fiind data o transformare canonica, ea transforma(16.11) ıntr-o identitate pentru o functie arbitrara S si o constanta c . Reciproc, daca seda functia arbitrara S si constanta c , atunci transformarea (16.3), care transforma (16.11)ın identitate, va fi canonica. Acesta este motivul pentru care S poarta numele de functiegeneratoare.
Functia generatoare S depinde de un numar de (2n+1) variabile independente : timpul tsi un numar de (2n) argumente alese din totalul de (4n) coordonate si impulsuri generalizateqk, Qk, pk, Pk ; k = 1, . . . , n care sunt legate prin intermediul ecuatiilor (16.3). In identitateafundamentala (16.11) s-a considerat ca S = S(t, q, p) si atunci daca este data constantac 6= 0 , functia generatoare S(t, q, p) va genera transformarile canonice definite deecuatiile (16.3) . Este ınsa evident ca ın anumite conditii, pot fi generate transformaricanonice pornind si de la functii avand forma generala :
S1(t, q, Q) , S2(t, q, P ) , S3(t, p, Q) , S4(t, p, P ) (16.12)
sau de la functii de variabile combinate. In cele ce urmeaza, vor fi examinate doar trans-formarile canonice definite de functiile generatoare avand forma (16.12).
Daca se au ın vedere transformarile (16.3) pentru care este ındeplinita conditia suplimen-tara :
det
(∂Qk
∂pj
)6= 0 ; k, j = 1, . . . , n (16.13)
atunci din ecuatiile Qk = Qk(t, q, p) ; k = 1, . . . , n pot fi exprimate vechile impulsuri ınfunctie de vechile si noile coordonate :
pk = pk(t, q, Q) ; k = 1, . . . , n (16.14)
functia generatoare S(t, q, p) devenind astfel functie de variabilele independente (t, q, Q) :
S [ t, q, p(t, q, Q) ] = S1(t, q, Q) (16.15)
Transformarile caracterizate de conditia suplimentara (16.13) si care sunt generate de functiaS1(t, q, Q) sunt numite transformari canonice libere . Ecuatiile acestor transformari seobtin din identitatea fundamentala (16.11) care devine :
n∑
k=1
Pk δQk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS1(t, q, Q) (16.16)
adica :
n∑
k=1
(c pk − ∂S1
∂qk
)δqk −
n∑
k=1
(Pk +
∂S1
∂Qk
)δQk +
(K − cH − ∂S1
∂t
)δt = 0 (16.17)
Din anularea simultana a coeficientilor, rezulta ecuatiile transformarii cautate :
c pk =∂S1
∂qk
, Pk = − ∂S1
∂Qk
; k = 1, . . . , n (16.18)

426 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
precum si legatura dintre noul si vechiul hamiltonian :
K = cH +∂S1
∂t(16.19)
Daca functia generatoare S1(t, q, Q) ındeplineste conditia :
det
(∂2S1
∂Qk∂qj
)6= 0 ; k, j = 1, . . . , n (16.20)
atunci din primul grup de ecuatii (16.18) rezulta dependentele Qk = Qk(t, q, p) ; k =1, . . . , n , care ınlocuite ın cel de al doilea grup de ecuatii (16.18) conduc la dependentelePk = Pk(t, q, p) ; k = 1, . . . , n . In consecinta, fiind data functia generatoare S1(t, q, Q)care ındeplineste conditia (16.20), precum si constanta arbitrara c 6= 0 , ecuatiile(16.18) definesc o transformare canonica .
Daca sunt alese ca variabile independente marimile (t, q, P ) , functia generatoare a trans-
formarii canonice va fi S2(t, q, P ) . Deoarece Pk = − ∂S1
∂Qk
; k = 1, . . . , n , trecerea de la va-
riabilele (t, q, Q) la variabilele (t, q, P ) poate fi realizata folosind o transformare Legendre,conform careia functia S2 poate fi obtinuta din functia S1 cu ajutorul relatiei :
S2(t, q, P ) = S1(t, q, Q) +n∑
k=1
PkQk (16.21)
Identitatea fundamentala (16.16) se va scrie acum sub forma :
n∑
k=1
Pk δQk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS2(t, q, P ) +
n∑
k=1
Pk δQk +n∑
k=1
Qk δPk (16.22)
adica :
−n∑
k=1
Qk δPk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS2(t, q, P ) (16.23)
si atunci :
n∑
k=1
(c pk − ∂S2
∂qk
)δqk +
n∑
k=1
(Qk − ∂S2
∂Pk
)δPk +
(K − cH − ∂S2
∂t
)δt = 0 (16.24)
Ecuatiile transformarilor canonice vor fi :
c pk =∂S2
∂qk
, Qk =∂S2
∂Pk
; k = 1, . . . , n (16.25)
si ın plus :
K = cH +∂S2
∂t(16.26)
Daca functia generatoare S2 ındeplineste conditia :
det
(∂2S2
∂Pk∂qj
)6= 0 ; k, j = 1, . . . , n (16.27)

16.1. TRANSFORMARI CANONICE 427
atunci din primul grup de ecuatii (16.25) rezulta dependentele Pk = Pk(t, q, p) ; k = 1, . . . , n ,care ınlocuite ın cel de al doilea grup de ecuatii (16.25) conduc la dependentele Qk =Qk(t, q, p) ; k = 1, . . . , n . In consecinta, pornind de la functia generatoare S2(t, q, P )asa ıncat conditia (16.27) sa fie satisfacuta si dandu-se o constanta c 6= 0 , ecuatiile(16.25) definesc o transformare canonica .
Deoarece c pk =∂S1
∂qk
, functia generatoare S3(t, p, Q) poate fi obtinuta din S1(t, q, Q) tot
prin intermediul unei transformari Legendre :
S3(t, p,Q) = S1(t, q, Q)− cn∑
k=1
pkqk (16.28)
Identitatea fundamentala (16.16) se va scrie acum sub forma :
n∑
k=1
Pk δQk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS3(t, p, Q)− c
n∑
k=1
pk δqk − cn∑
k=1
qk δpk (16.29)
adica :n∑
k=1
Pk δQk −K δt = − c
(n∑
k=1
qk δpk + H δt
)− δS3(t, q, P ) (16.30)
si atunci :
−n∑
k=1
(c qk +
∂S3
∂pk
)δpk −
n∑
k=1
(Pk +
∂S3
∂Qk
)δQk +
(K − cH − ∂S3
∂t
)δt = 0 (16.31)
Se obtin urmatoarele ecuatii ale transformarilor canonice :
c qk = − ∂S3
∂pk
, Pk = − ∂S3
∂Qk
; k = 1, . . . , n (16.32)
si :
K = cH +∂S3
∂t(16.33)
Daca ın plus functia generatoare S3 satisface la conditia :
det
(∂2S3
∂Qk∂Pj
)6= 0 ; k, j = 1, . . . , n (16.34)
atunci scotand din primul grup de ecuatii (16.32) dependentele Qk = Qk(t, q, p) ; k = 1, . . . , nsi ınlocuindu-le ın cel de al doilea grup de ecuatii (16.32), se pot exprima noile coordonatecanonice ın functie de cele vechi. Astfel, dandu-se functia generatoare S3(t, p, Q) careındeplineste conditia (16.34), precum si constanta c 6= 0 , ecuatiile (16.32) vordefini o transformare canonica .
In fine, pentru a obtine pe S4(t, p, P ) din functia generatoare S1(t, q, Q) va fi efectuata otransformare Legendre dubla :
S4(t, p, P ) = S1(t, q, Q) +n∑
k=1
PkQk − cn∑
k=1
pkqk (16.35)

428 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Identitatea fundamentala (16.16) devine :
n∑
k=1
Pk δQk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS4(t, p, Q) +
+n∑
k=1
Pk δQk +n∑
k=1
Qk δPk − cn∑
k=1
pk δqk − cn∑
k=1
qk δpk
(16.36)
adica :
−n∑
k=1
Qk δPk −K δt = − c
(n∑
k=1
qk δpk + H δt
)− δS4(t, q, P ) (16.37)
si atunci :
−n∑
k=1
(c qk +
∂S4
∂pk
)δpk +
n∑
k=1
(Qk − ∂S4
∂Pk
)δPk +
(K − cH − ∂S3
∂t
)δt = 0 (16.38)
de unde se obtin ecuatiile :
c qk = − ∂S4
∂pk
, Qk =∂S4
∂Pk
; k = 1, . . . , n (16.39)
si :
K = cH +∂S4
∂t(16.40)
Noile coordonate canonice pot fi definite ın raport cu cele vechi daca din primul grupde ecuatii (16.39) se determina dependentele Pk = Pk(t, q, p) ; k = 1, . . . , n care apoi seınlocuiesc ın al doilea grup de ecuatii (16.39). In acest scop va trebui ca :
det
(∂2S4
∂Pk∂pj
)6= 0 ; k, j = 1, . . . , n (16.41)
Astfel, pornind de la functia generatoare S4(t, p, P ) care ındeplineste conditia(16.41) si de la o constanta c 6= 0 , se poate defini o transformare canonica cuajutorul ecuatiilor (16.39) .
Deoarece ın mecanica prezinta interes ın special transformarile canonice univalente(c = 1) , ın cele ce urmeaza vor fi date cateva exemple de astfel de transformari.
a) Se considera o functie generatoare de tipul S1 avand forma :
S1(q,Q) =n∑
k=1
qkQk (16.42)
si c = 1 . In acest caz K = H , iar ecuatiile transformarilor, conform (16.18), vor fi :
pk =∂S1
∂qk
= Qk , Pk = − ∂S1
∂Qk
= − qk ; k = 1, . . . , n (16.43)
In esenta, o astfel de transformare schimba ıntre ele locurile coordonatelor si impulsu-rilor (cu exceptia unui semn), ceea ce confirma din nou pozitia echivalenta a coordonatelor si

16.1. TRANSFORMARI CANONICE 429
impulsurilor generalizate ın descrierea miscarii sistemului ın spatiul fazelor Λ2n . Deosebireaıntre acestea consta doar ın terminologie (!) deoarece schimband ıntre ele denumirile, rezultacel mult o schimbare de semn.
b) Se alege ca functie generatoare a unei transformari canonice univalente c = 1 functia :
S2(t, q, P ) =n∑
k=1
fk(t, q) Pk (16.44)
unde fk ; k = 1, . . . , n sunt niste functii arbitrare de argumentele (t, q) . Folosind al doileagrup de formule (16.25), rezulta ca noile coordonate vor fi :
Qk =∂S2
∂Pk
= fk(t, q) ; k = 1, . . . , n (16.45)
ceea ce reprezinta ecuatiile transformarilor punctuale, deoarece noile coordonate generalizatedepind doar de timp si de vechile coordonate, nu si de vechile impulsuri. In consecinta,toate transformarile punctuale sunt si transformari canonice , reciproca nefiind ınsaıntotdeauna adevarata.
Daca functiile fk ; k = 1, . . . , n sunt alese de forma :
fk =n∑
j=1
akjqj ; k = 1, . . . , n (16.46)
cu akj ; k, j = 1, . . . , n niste constante ıntre care exista relatiile :
n∑
j=1
akjalj = δkl ; k, l = 1, . . . , n (16.47)
atunci K = H si :
Qk =n∑
j=1
akjqj ; k = 1, . . . , n (16.48)
ceea ce reprezinta ecuatiile transformarilor ortogonale pentru coordonate . Folosindprimul grup de formule (16.25), se va putea scrie succesiv :
pj =∂S2
∂qj
=∂
∂qj
(n∑
l=1
flPl
)=
∂
∂qj
n∑
l,k=1
alkqkPl
=
n∑
l,k=1
alkδkjPl =n∑
l=1
aljPl ; j = 1, . . . , n
(16.49)Inmultind fiecare din aceste ecuatii cu akj ; k, j = 1, . . . , n si sumand dupa toate valorile luij rezulta :
n∑
j=1
akjpj =n∑
j,l=1
akjaljPl =n∑
l=1
δklPl = Pk ; k = 1, . . . , n (16.50)
ceea ce ınseamna ca si noile impulsuri se obtin folosind aceeasi transformare ortogonala casi pentru coordonate. Rezultatul era de asteptat, deoarece s-a vazut ca ın spatiul fazelornu exista o deosebire esentiala ıntre coordonatele qk ; k = 1, . . . , n si impulsurile pk ; k =1, . . . , n , ele fiind considerate variabile independente.

430 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Daca ın particular akj = δkj ; k, j = 1, . . . , n , atunci :
Qk = qk , Pk = pk ; k = 1, . . . , n (16.51)
adica functia generatoare S2 =n∑
k=1
qkPk , cu c = 1 , conduce la transformarea identica .
Aplicatii
1. Sa se rezolve problema determinarii miscarii oscilatorului armonic anizotrop, folosindtransformarile canonice libere univalente generate de functia :
S1 =1
2
3∑
i=1
mωiq2i ctg Qi , ωi =
√ki
m; i = 1, 2, 3 (1)
unde q1 = x , q2 = y , q3 = z .
Rezolvare : Hamiltonianul corespunzator miscarii unui punct material de masa m subinfluenta unei forte elastice caracterizata prin constante elastice diferite pe cele trei directii, areexpresia :
H =3∑
i=1
(p2
i
2m+
kiq2i
2
)=
3∑
i=1
(p2
i
2m+
mω2i q
2i
2
)(2)
Ecuatiile transformarilor canonice univalente generate de functia (1) vor fi de forma :
pi =∂S1
∂qi
= mωiqictg Qi , Pi = − ∂S1
∂Qi
=1
2mωiq
2i
1
sin2 Qi
; i = 1, 2, 3 (3)
Din ecuatiile (3) rezulta legatura dintre vechile si noile variabile canonice :
qi =
√2Pi
mωi
sin Qi , Pi =√
2mωiPi cos Qi ; i = 1, 2, 3 (4)
In noile variabile, hamiltonianul va avea expresia simpla :
K = H =3∑
i=1
ωiPi (5)
Se observa ca noile coordonate Qi ; i = 1, 2, 3 sunt ciclice pentru noul hamiltonian. Sistemulcanonic capata forma :
Qi =∂K
∂Pi
= ωi , Pi = − ∂K
∂Qi
= 0 ; i = 1, 2, 3 (6)
prin integrare directa rezultand :
Qi = ωit + Q0i , Pi = P 0
i ; i = 1, 2, 3 (7)
Trecand la vechile variabile, se obtine solutia cunoscuta :
qi =
√2P 0
i
mωi
sin(ωit + Q0
i
), Pi =
√2mωiP 0
i cos(ωit + Q0
i
); i = 1, 2, 3 (8)

16.1. TRANSFORMARI CANONICE 431
unde Q0i , P 0
i ; i = 1, 2, 3 sunt constante de integrare care se determina din conditiile initiale.Daca frecventele ωi ; i = 1, 2, 3 sunt comensurabile, traiectoria ın spatiul fizic este o curbaınchisa, iar miscarea este periodica.
2. Sa se arate ca urmatoarele transformari sunt canonice :
a)
Q =√
2q e k cos p
P =√
2q e−k sin pb)
Q = q + pt +1
2gt2
P = p + gtc)
Q = q cos kt +p
ksin kt
P = −kq sin kt + p cos kt
Pentru fiecare caz ın parte sa se determine functia generatoare, precum si relatia dintre vechiulsi noul hamiltonian.
Rezolvare : In toate cazurile sistemul este cu un sigur grad de libertate, asa ca conditianecesara si suficienta ca o transformare sa fie canonica se reduce la :
P δQ−K δt = c (p δq −H δt)− δS (1)
adica :P δQ− c p δq = (K − cH) δt− δS (2)
unde S este functia generatoare, iar c este valenta transformarii.a) Calculam :
P δQ− c p δq =√
2q e−k sin p
(δq√2q
ek cos p−√
2q ek sin p δp
)− c p δq =
=(
sin 2p
2− c p
)δq + q (cos 2p− 1) δp
(3)
Din conditia de diferentiala totala :
∂
∂p
(sin 2p
2− c p
)=
∂
∂q[ q (cos 2p− 1)] (4)
rezulta c = 1 . Transformarea (a) este canonica univalenta cu functia generatoare :
S(q, p) = − q(
sin 2p
2− c p
)(5)
si :K = H (6)
b) Tinand seama de ecuatiile transformarii, rezulta :
P =Q− q
t+
1
2gt , p =
Q− q
t− 1
2gt (7)
deci :
P δQ− c p δq =(
Q− q
t+
1
2gt
)δQ− c
(Q− q
t− 1
2gt
)δq =
=Q− q
t(δQ− c δq) +
1
2gt (δQ + c δq)
(8)

432 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Din conditia de diferentiala totala exacta rezulta c = 1, deci (b) reprezinta ecuatiile unei trans-formari canonice libere univalente cu functia generatoare :
S1(t, q, Q) = − 1
2t(Q− q)2 − 1
2gt (Q + q) (9)
Relatia dintre vechiul si noul hamiltonian va fi :
K = H +∂S1
∂t= H +
1
2
(Q− q
t
)2
− 1
2g (Q + q) (10)
c) Deoarece :
P = k ctg kt ·Q− kq
sin kt, p =
kQ
sin kt− k ctg kt · q (11)
obtinem :
P δQ− c p δq = k ctg kt · (QδQ + q δq)− k
sin kt(q δQ + cQ δq) (12)
Impunand conditia de diferentiala totala exacta, rezulta c = 1 , iar functia generatoare a trans-formarii canonice libere univalente va fi :
S1(t, q, Q) = − k
2
(Q2 + q2
)ctg kt +
kqQ
sin kt(13)
Pentru legatura dintre K si H se va obtine :
K = H +∂S1
∂t= H +
k2
2 sin2 kt
(Q2 + q2 − 2qQ cos kt
)(14)
16.1.2 Criterii de canonicitate
Dupa cum s-a vazut, conditia necesara si suficienta pentru ca transformarea :
Qk = Qk(t, q, p)
Pk = Pk(t, q, p); k = 1, . . . , n ,
∂(Q, P )
∂( q , p )6= 0 (16.52)
sa fie canonica, consta ın existenta unei functii generatoare S si a unei constante arbitrarec 6= 0 , pentru care ecuatia :
n∑
k=1
Pk δQk −K δt = c
(n∑
k=1
pk δqk −H δt
)− δS (16.53)
sa fie satisfacuta identic ın virtutea transformarii (16.52). Criteriul formulat astfel prezintaavantajul ca dandu-se transformarea (16.52), din (16.53) pot fi calculate functia generatoareS si valenta c 6= 0 . Adesea calculele sunt deosebit de laborioase, ele devenind inutile dacane limitam doar la cerinta de a verifica daca transformarea (1) este sau nu este canonica.

16.1. TRANSFORMARI CANONICE 433
Pentru ınceput sa aratam ca pentru ca transformarea (16.52) care contine explicittimpul t sa fie canonica, este necesar si suficient ca toate transformarile obtinutedin (16.52) prin ınlocuirea lui t cu o valoare arbitrara fixata t sa fie canonice si saaiba una si aceeasi valenta c . Intr-adevar, pentru o valoare arbitrara fixata a timpuluit = t , identitatea fundamentala (16.53) devine :
n∑
k=1
Pk δQk = cn∑
k=1
pk δqk − δS(t, q, p) (16.54)
Insa aceasta reprezinta identitatea fundamentala pentru o transformare care nu contineexplicit timpul :
Qk = Qk(t, q, p)
Pk = Pk(t, q, p); k = 1, . . . , n ,
∂(Q, P )
∂( q , p )6= 0 (16.55)
asa ıncat formulele (16.55) definesc o transformare canonica cu valenta c care este inde-pendenta de valoarea aleasa pentru t = t . Reciproc, presupunem ca toate transformarileobtinute din (16.52) prin ınlocuirea variabilei t cu o valoare fixata t sunt canonice, avanduna si aceeasi valenta c . In acest caz, definind functia K sub forma :
K = cH +∂S
∂t(16.56)
din (16.54) si (16.56) se obtine identitatea fundamentala (16.53) conform careia transforma-rea (16.52) care contine explicit timpul este canonica.
In baza acestei teoreme, se poate stabili un criteriu de canonicitate limitandu-ne doarla transformarile canonice care nu depind explicit de timp, transformari numite completcanonice , sau omogene :
Qk = Qk(q, p)
Pk = Pk(q, p); k = 1, . . . , n ,
∂(Q,P )
∂( q , p )6= 0 (16.57)
pentru care identitatea fundamentala se scrie :
n∑
k=1
Pk δQk = cn∑
k=1
pk δqk − δS(q, p) (16.58)
Deoarece folosind formulele (16.57) rezulta :
δQj =n∑
k=1
(∂Qj
∂qk
δqk +∂Qj
∂pk
δpk
)(16.59)
identitatea (16.58) devine :
n∑
k=1
(Φk δqk + Ψ δpk) = − δS(q, p) (16.60)

434 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
unde :
Φk =n∑
k=1
Pj∂Qj
∂qk
− c pk , Ψk =n∑
k=1
Pj∂Qj
∂pk
; k = 1, . . . , n (16.61)
Criteriul de canonicitate al transformarii (16.57) se obtine impunand conditiile ca membrulstang al egalitatii (16.60) sa fie o diferentiala totala exacta :
∂Φk
∂qj
=∂Φj
∂qk
,∂Ψk
∂pj
=∂Ψj
∂pk
,∂Φk
∂pj
=∂Ψj
∂qk
; k, j = 1, . . . , n (16.62)
Avand ın vedere notatiile (16.61), conditiile (16.62) capata forma explicita :
n∑
l=1
(∂Ql
∂qk
∂Pl
∂qj
− ∂Ql
∂qj
∂Pl
∂qk
)= 0
n∑
l=1
(∂Ql
∂pk
∂Pl
∂pj
− ∂Ql
∂pj
∂Pl
∂pk
)= 0
n∑
l=1
(∂Ql
∂qk
∂Pl
∂pj
− ∂Ql
∂pj
∂Pl
∂qk
)= c δkj
; k, j = 1, . . . , n (16.63)
Cu notatia :
u, v Q,P =n∑
k=1
(∂Qk
∂u
∂Pk
∂v− ∂Qk
∂v
∂Pk
∂u
)(16.64)
care reprezinta paranteza Lagrange 1 pentru functiile Qk , Pk ; k = 1, . . . , n de doua vari-abile u, v , conditiile (16.63) se scriu ın forma compacta :
qk, qj Q,P = 0 , pk, pj Q,P = 0 , qk, pj Q,P = c δkj ; k, j = 1, . . . , n (16.65)
Egalitatile (16.65) exprima conditiile necesare si suficiente pentru ca transformarea (16.57)sa fie canonica, cu valenta c 6= 0 , Conform teoremei enuntate anterior, daca conditiile(16.65) ısi pastreaza valabilitatea pentru orice valoare a parametrului t , atuncitransformarea dependenta de timp (16.52) va fi canonica cu valenta c 6= 0 .
Criteriul de canonicitate dat de ecuatiile (16.65) este echivalent cu afirmatia ca matri-cea jacobiana a transformarii canonice este o matrice simplectica . Notand cu Mmatricea jacobiana a unei transformari canonice :
M =
∂Q1
∂q1
· · · ∂Q1
∂qn
∂Q1
∂p1
· · · ∂Q1
∂pn...
......
...∂Qn
∂q1
· · · ∂Qn
∂qn
∂Qn
∂p1
· · · ∂Qn
∂pn
∂P1
∂q1
· · · ∂P1
∂qn
∂P1
∂p1
· · · ∂P1
∂pn...
......
...∂Pn
∂q1
· · · ∂Pn
∂qn
∂Pn
∂p1
· · · ∂Pn
∂pn
≡
(∂Q
∂q
) (∂Q
∂p
)
(∂P
∂q
) (∂P
∂p
)
(16.66)
1 Dupa cum s-a mai precizat, ın aceasta lucrare care se adreseaza ın special fizicienilor, pentru parantezelePoisson este folosita notatia [ . . . ] , iar pentru parantezele Lagrange este folosita notatia . . . .
16.1. TRANSFORMARI CANONICE 435
si considerand matricea canonica :
J =
0 −I
I 0
(16.67)
unde I este matricea unitate de ordinul n , matricea M este simplectica daca satisface laconditia :
MJM = cJ (16.68)
unde M este transpusa matricei (16.66), iar c este o constanta scalara nenula care ın acest cazcoincide cu valenta transformarii canonice. Pentru a demonstra relatia (16.68) se calculeazamai ıntai produsul :
MJ =
˜(∂P
∂q
)−
˜(∂Q
∂q
)
˜(∂P
∂p
)−
˜(∂Q
∂p
)
(16.69)
si apoi :
MJM =
˜(∂P
∂q
) (∂Q
∂q
)−
˜(∂Q
∂q
) (∂P
∂q
) ˜(∂P
∂q
) (∂Q
∂p
)−
˜(∂Q
∂q
) (∂P
∂p
)
˜(∂P
∂p
) (∂Q
∂q
)−
˜(∂Q
∂p
) (∂P
∂q
) ˜(∂P
∂p
) (∂Q
∂p
)−
˜(∂Q
∂p
) (∂P
∂p
)
(16.70)
Observand ca conform relatiilor (16.65) avem :
˜(∂P
∂q
) (∂Q
∂q
)−
˜(∂Q
∂q
) (∂P
∂q
)
kj
=n∑
l=1
(∂Pl
∂qk
∂Ql
∂qj
− ∂Ql
∂qk
∂Pl
∂qj
)= − qk, qj Q,P = 0
˜(∂P
∂q
) (∂Q
∂p
)−
˜(∂Q
∂q
) (∂P
∂p
)
kj
=n∑
l=1
(∂Pl
∂qk
∂Ql
∂pj
− ∂Ql
∂qk
∂Pl
∂pj
)= − qk, pj Q,P = −c δkj
˜(∂P
∂p
) (∂Q
∂q
)−
˜(∂Q
∂p
) (∂P
∂q
)
kj
=n∑
l=1
(∂Pl
∂pk
∂Ql
∂qj
− ∂Ql
∂pk
∂Pl
∂qj
)= − pk, qj Q,P = c δkj
˜(∂P
∂p
) (∂Q
∂p
)−
˜(∂Q
∂p
) (∂P
∂p
)
kj
=n∑
l=1
(∂Pl
∂pk
∂Ql
∂pj
− ∂Ql
∂pk
∂Pl
∂pj
)= − qk, qj Q,P = 0
k, j = 1, . . . , n(16.71)
rezulta :MJM = cJ (16.72)
O consecinta directa a acestei definitii este faptul ca matricea simplectica M este nesingulara.Intr-adevar, deoarece detJ = 1 , iar determinantul unui produs de matrici este egal cuprodusul determinantilor matricelor, din (16.68) rezulta :
detM = ±√c unde c 6= 0 (16.73)

436 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Folosind relatia (16.68) poate fi stabilita usor legatura dintre paranteza Lagrange calcu-lata pentru functiile Qk , Pk ; k = 1, . . . , n si paranteza Lagrange calculata pentru functiileqk , pk ; k = 1, . . . , n , legatura dintre cele doua sisteme de functii fiind realizata prin inter-mediul unei transformari canonice cu valenta c 6= 0 . Folosind notatia matriceala, definitia(16.64) pentru paranteza Lagrange se scrie :
u, v Q,P =n∑
k=1
(∂Qk
∂u
∂Pk
∂v− ∂Qk
∂v
∂Pk
∂u
)= −
(∂Q
∂u
) (∂P
∂u
) J
(∂Q
∂v
)
(∂P
∂v
)
(16.74)
Se verifica direct ca :
(∂Q
∂u
) (∂P
∂u
) =
(∂q
∂u
) (∂p
∂u
) M ,
(∂Q
∂v
)
(∂P
∂v
)
= M
(∂q
∂v
)
(∂p
∂v
)
(16.75)
asa ıncat (16.74) devine ın continuare :
u, v Q,P = − c
(∂q
∂u
) (∂p
∂u
) J
(∂q
∂v
)
(∂p
∂v
)
= c u, v q,p (16.76)
Relatia obtinuta :
u, v q,p =1
cu, v Q,P (16.77)
poate fi privita ea ınsasi ca un criteriu de canonicitate al transformarii (16.52), daca ease pastreaza pentru orice valoare a parametrului t . Intr-adevar, facand ın (16.77) succesivu = qk , v = qj ; u = pk , v = pj ; u = qk , v = pj cu k, j = 1, . . . , n se obtin chiar conditiile(16.65), iar pe de alta parte facand u = Qk , v = Qj ; u = Pk , v = Pj ; u = Qk , v = Pj cuk, j = 1, . . . , n se obtin conditiile :
Qk, Qj q,p = 0 , Pk, Pj q,p = 0 , Qk, Pj q,p =1
cδkj ; k, j = 1, . . . , n (16.78)
care reprezinta o forma echivalenta a criteriului de canonicitate pentru transformarea (16.52).Conditia necesara si suficienta pentru ca transformarea (16.52) sa fie canonica cu valenta
c 6= 0 poate fi scrisa si cu ajutorul parantezelor Poisson . Pentru a ne convinge deaceasta, se va transcrie mai ıntai ıntr-o forma adecvata conditia (16.68) care exprima faptulca matricea jacobiana a transformarii canonice este simplectica. Inmultınd (16.68) la stangacu M−1 si la dreapta cu M−1 rezulta :
M−1 JM−1 =1
cJ (16.79)

16.1. TRANSFORMARI CANONICE 437
Inversa acestei egalitati matriceale va fi :
MJ−1 M = cJ−1 (16.80)
Pe de alta parte, deoarece :
J2 =
0 −I
I 0
0 −I
I 0
= −
I 0
0 I
= −JJ−1 (16.81)
rezulta :J−1 = −J (16.82)
si ın consecinta conditia (16.80) devine :
MJM = cJ (16.83)
Desi se poate arata direct ca aceasta conditie este echivalenta cu conditiile :
[ Qk, Qj ]q,p = 0 , [ Pk, Pj ]q,p = 0 , [ Qk, Pj ]q,p = c δkj ; k, j = 1, . . . , n (16.84)
unde
[ ϕ, ψ ]q,p =n∑
k=1
(∂ϕ
∂qk
∂ψ
∂pk
− ∂ϕ
∂pk
∂ψ
∂qk
)(16.85)
este paranteza Poisson pentru functiile ϕ , ψ de argumente qk , pk ; k = 1, . . . , n , se preferao metoda mai simpla. In acest scop se stabileste legatura dintre paranteza Poisson pentrufunctiile ϕ , ψ de argumente t , qk , pk ; k = 1, . . . , n si paranteza Poisson pentru aceleasifunctii ϕ , ψ privite ca functii de argumentele t , Qk , Pk ; k = 1, . . . , n obtinute din vechileargumente prin intermediul unei transformari canonice inverse. Folosind formalismul matri-ceal, definitia (16.85) se scrie :
[ ϕ, ψ ]q,p = −
(∂ϕ
∂q
) (∂ϕ
∂p
) J
(∂ψ
∂q
)
(∂ψ
∂p
)
(16.86)
Insa pe de alta parte :
(∂ϕ
∂q
) (∂ϕ
∂p
) =
(∂ϕ
∂Q
) (∂ϕ
∂P
) M ,
(∂ψ
∂q
)
(∂ψ
∂p
)
= M
(∂ψ
∂Q
)
(∂ψ
∂P
)
(16.87)
asa ıncat (16.86) devine :
[ ϕ, ψ ]q,p = − c
(∂ϕ
∂Q
) (∂ϕ
∂P
) J
(∂ψ
∂Q
)
(∂ψ
∂P
)
= c [ ϕ, ψ ]Q,P (16.88)

438 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
In consecinta, conditia necesara si suficienta pentru ca transformarea (16.52) safie canonica cu valenta c 6= 0 este ca relatia :
[ ϕ, ψ ]q,p = c [ ϕ, ψ ]Q,P (16.89)
sa-si pastreze forma pentru orice valoare a parametrului t si pentru orice functii ϕsi ψ de argumentele mentionate . Facand ın (16.89) succesiv identificarile ϕ = Qk , ψ =Qj ; ϕ = Pk , ψ = Pj ; ϕ = Qk , ψ = Pj cu k, j = 1, . . . , n se obtin conditiile (16.84), iardaca ϕ = qk , ψ = qj ; ϕ = pk , ψ = pj ; ϕ = qk , ψ = pj cu k, j = 1, . . . , n rezulta formaechivalenta a criteriului de canonicitate :
[ qk, qj ]Q,P = 0 , [ pk, pj ]Q,P = 0 , [ qk, pj ]Q,P =1
cδkj ; k, j = 1, . . . , n (16.90)
In ıncheiere, trebuie remarcat ca atat parantezele Lagrange, cat si parantezele Poisson,sunt invariante la o transformare canonica univalenta :
u, v q,p = u, v Q,P , [ ϕ, ψ ]q,p = [ ϕ, ψ ]Q,P (16.91)
In plus, deoarece determinantul matricei jacobiene a transformarii canonice univalente estedetM = +1 (pentru o transformare identica este evident ca detM = +1), va fi de asemeneainvariant si elementul de volum ın spatiul fazelor :
dq1 . . . dqn dp1 . . . dpn = dQ1 . . . dQn dP1 . . . dPn (16.92)
Ultima observatie poate servi ca demonstratie pentru teorema lui Liouville, deoarece dupacum se va vedea ın cele ce urmeaza, miscarea unui sistem hamiltonian poate fi privita ca otransformare canonica univalenta.
Trebuie subliniat ca acesti trei invarianti fundamentali, anume parantezele Lagrange,parantezele Poisson si elementul de volum ın spatiul fazelor, sunt proprii doar transformarilorcanonice univalente.
16.2 Metoda Hamilton-Jacobi
16.2.1 Ecuatia si teorema Hamilton-Jacobi
Revenim asupra unei probleme enuntate ın §16.1.1, anume fiind dat un sistem olonom acarui miscare este descrisa de ecuatiile lui Hamilton :
qk =∂H
∂pk
, pk = − ∂H
∂qk
; k = 1, . . . , n (16.93)
urmeaza a fi cautata transformarea canonica univalenta ın urma careia noul hamil-tonian K al ecuatiilor de miscare pentru noile coordonate si impulsuri :
Qk =∂K
∂Pk
, Pk = − ∂K
∂Qk
; k = 1, . . . , n (16.94)

16.2. METODA HAMILTON-JACOBI 439
sa fie identic nul :
K = H +∂S
∂t≡ 0 (16.95)
In acest caz, solutia generala a sistemului (16.94) va fi :
Qk = bk , Pk = ak ; k = 1, . . . , n (16.96)
unde ak , bk ; k = 1, . . . , n sunt 2n constante arbitrare. Cunoscand transformarea canonica :
Qk = Qk(t, q, p)
Pk = Pk(t, q, p); k = 1, . . . , n ,
∂(Q, P )
∂( q , p )6= 0 (16.97)
si tinand cont de (16.96), sistemul (16.97) poate fi rezolvat ın raport cu necunoscutele (q, p) ,rezultand :
qk = qk(t, a1, . . . , an, b1, . . . , bn)
pk = pk(t, a1, . . . , an, b1, . . . , bn); k = 1, . . . , n (16.98)
adica solutia generala a ecuatiilor de miscare (16.93). Constantele ak , bk ; k = 1, . . . , n potfi exprimate prin conditiile initiale ale problemei.
Dupa cum se stie, transformarea canonica cautata este definita ın ıntregime, daca estecunoscuta functia generatoare a transformarii respective (c = 1) . In consecinta, pentru arezolva problema determinarii miscarii ın maniera descrisa mai sus, va trebui gasitafunctia generatoare a transformarii canonice, ın urma cariea noile variabile canonice suntniste constante. In conformitate cu conditia (16.95), rezulta ca functia generatoare vaındeplini ecuatia :
∂S
∂t+ H(t, q1, . . . , qn, p1, . . . , pn) = 0 (16.99)
Alegand ın calitate de functie generatoare o functie de tipul S2(t, q, P ) , deoarece :
pk =∂S2
∂qk
, Qk =∂S2
∂Pk
; k = 1, . . . , n (16.100)
rezulta ca functia generatoare cautata va fi o solutie a ecuatiei :
∂S
∂t+ H
(t, q1, . . . , qn,
∂S
∂q1
, . . . ,∂S
∂qn
)= 0 (16.101)
unde s-a renuntat la scrierea indicelui ın S2 . Ecuatia (16.101) este o ecuatie diferentialacu derivate partiale de ordinul ıntai, care permite determinarea dependentei functiei S detimpul t si de coordonatele q1, . . . , qn , ınsa ea nu furnizeaza nici o informatie cu privire ladependenta functiei generatoare S de noile impulsuri, despre care se stie doar ca ele trebuiesa fie niste constante Pk = ak ; k = 1, . . . , n .
Ecuatia (16.101) poarta numele de ecuatia Hamilton-Jacobi , iar functia S este cu-noscuta sub numele de functia principala a lui Hamilton . Odata determinata functiaS(t, q, a) ca solutie a ecuatiei (16.101), ecuatiile transformarii canonice cautate vor fi :
pk =∂S(t, q, a)
∂qk
, Qk = bk =∂S(t, q, a)
∂ak
; k = 1, . . . , n (16.102)

440 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
si problema determinarii miscarii sistemului mecanic se ıncheie. Intr-adevar, deoarece functiageneratoare trebuie sa ındeplineasca conditia :
det
(∂2S
∂ak∂qj
)6= 0 ; k, j = 1, . . . , n (16.103)
folosind primul grup de ecuatii (16.102) pot fi determinate, pentru t = t0 , valorile constan-telor ak ; k = 1, . . . , n ın functie de valorile initiale ale coordonatelor si impulsurilor (q0, p0) .Al doilea grup de ecuatii (16.102) va furniza direct valorile constantelor bk ; k = 1, . . . , n ,daca sunt cunoscute valorile (q0) la timpul t = t0 . Rezolvand apoi al doilea grup de ecuatii(16.102) ın raport cu variabilele qk ; k = 1, . . . , n , rezulta solutia finala :
qk = qk(t, a, b) ; k = 1, . . . , n (16.104)
deoarece constantele (a, b) sunt deja determinate ın raport cu datele initiale ale problemei.Inlocuind (16.104) ın primul grup de ecuatii (16.102), vor rezulta prin derivare impulsurile :
pk = pk(t, a, b) ; k = 1, . . . , n (16.105)
Se observa ca problema integrarii sistemului canonic este ınlocuita de problema echi-valenta a determinarii unei solutii a ecuatiei Hamilton-Jacobi, care sa fie functie de timp,de coordonatele generalizate (q) si de un numar de n constante arbitrare ak ; k = 1, . . . , n .Pe de alta parte, se stie din teoria ecuatiilor diferentiale, ca o integrala completa a uneiecuatii cu derivate partiale de ordinul ıntai care contine (n + 1) variabile independente,contine tot atatea constante independente arbitrare. Deoarece ın ecuatia Hamilton-Jacobi,
functia S intervine doar sub forma derivatelor∂S
∂tsi
∂S
∂qk
; k = 1, . . . , n , ınseamna ca una din
aceste constante este aditiva , spre deosebire de celelalte n care sunt constante esentiale .Facand abstractie de constanta aditiva, integrala completa a ecuatiei Hamilton-Jacobi va fiscrisa formal :
S = S(t, q1, . . . , qn, a1, . . . , an) (16.106)
Deoarece ın plus integrala completa satisface la o conditie similara cu (16.103), rezulta ca sepoate identifica integrala completa a ecuatiei (16.101) cu functia generatoare a transformariicanonice cautate.
Rezumand cele expuse, poate fi formulata teorema Hamilton-Jacobi , conform careiadaca functia S(t, q, a) este o integrala completa a ecuatiei Hamilton-Jacobi(16.101), atunci solutia generala a sistemului canonic (16.93) este determinatade sistemul de ecuatii :
pk =∂S
∂qk
, bk =∂S
∂ak
; k = 1, . . . , n (16.107)
ın care ak , bk ; k = 1, . . . , n sunt niste constante arbitrare .Aceasta teorema reduce rezolvarea sistemului canonic la gasirea unei integrale complete
a ecuatiei Hamilton-Jacobi. Trebuie observat ca determinarea integralei complete a ecuatieiHamilton-Jacobi implica scrierea sistemului caracteristic asociat , care ınsa coincide cu

16.2. METODA HAMILTON-JACOBI 441
sistemul canonic 2. De aceea teorema Hamilton-Jacobi poate fi utila doar daca este posibiladeterminarea unei integrale complete pe alta cale, fara a face apel la sistemul caracteristic.Dupa cum se va vedea, pot fi ıntalnite adesea astfel de situatii.
In cele ce urmeaza, sunt examinate cateva cazuri particulare ın care ecuatia Hamilton-Jacobi si integrala ei completa, au forme ceva mai simple.
Daca timpul t nu intervine explicit ın expresia functiei H :∂H
∂t= 0 , atunci pe
solutia sistemului canonic va trebui ca :
H(q1, . . . , qn, p1, . . . , pn) = h (16.108)
unde h este o constanta, care reprezinta energia sistemului. Deoarece ecuatia Hamilton-Jacobi se reduce acum la :
∂S
∂t= −h (16.109)
rezulta ca :S = −h t + W (q1, . . . , qn) (16.110)
2 Pentru a gasi solutia z = Φ(x1, . . . , xn) a ecuatiei cu derivate partiale se ordinul ınai :
F (x1, . . . , xn; z; p1, . . . , pn) = 0 unde pi =∂z
∂xi; i = 1, . . . , n
trebuie gasita solutia sistemului caracteristic asociat :
dz
dτ=
n∑
k=1
pkdxk
dτsi
dxi
dτ=
∂F
∂pi,
dpi
dτ= − ∂F
∂xi− pi
∂F
∂z; i = 1, . . . , n
Daca ecuatia diferentiala nu contine explicit functia necunoscuta z :
G(x1, . . . , xn; p1, . . . , pn) = 0 unde pi =∂z
∂xi; i = 1, . . . , n
sistemul caracteristic asociat are forma simpla :
dz
dτ=
n∑
k=1
pkdxk
dτsi
dxi
dτ=
∂G
∂pi,
dpi
dτ= − ∂G
∂xi; i = 1, . . . , n
adica :dτ =
dx1
∂G
∂p1
= · · · = dxn
∂G
∂pn
=dp1
− ∂G
∂x1
= · · · = dpn
− ∂G
∂xn
In cazul ecuatiei Hamilton-Jacobi :
∂S
∂t+ H
(t, q1, . . . , qn,
∂S
∂q1, . . . ,
∂S
∂qn
)= 0
sistemul caracteristic asociat este :
dq1
∂H
∂p1
= · · · = dqn
∂H
∂pn
=dt
1=
dp1
−∂H
∂q1
= · · · = dpn
−∂H
∂qn
=− dH
−∂H
∂t
adica tocmai sistemul canonic.
442 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Functia W se determina scriind ca (16.110) satisface ecuatia Hamilton-Jacobi. Rezulta :
H
(q1, . . . , qn,
∂W
∂q1
, . . . ,∂W
∂qn
)= h (16.111)
Ecuatia obtinuta poarta numele de ecuatia redusa Hamilton-Jacobi , functia W fiindcunoscuta sub numele de functia caracteristica a lui Hamilton . Integrala completa aecuatei (16.111) va depinde de un numar de (n− 1) constante esentiale ak la care se adaugaconstanta an ≡ h :
W = W (q1, . . . , qn, a1, . . . , an−1, h) (16.112)
Functia W satisface la conditia :
det
(∂2W
∂ak∂qj
)6= 0 ; k, j = 1, . . . , n , an ≡ h (16.113)
In consecinta, integrala completa a ecuatiei Hamilton-Jacobi va avea forma :
S = −h t + W (q1, . . . , qn, a1, . . . , an−1, h) (16.114)
Aplicand teorema Hamilton-Jacobi, sistemul (16.102) care permite determinarea solutieisistemului canonic, se reduce la :
pk =∂W
∂qk
; k = 1, . . . , n (16.115)
bk =∂W
∂ak
; k = 1, . . . , n− 1
bn = − t +∂W
∂h(an ≡ h)
(16.116)
In baza conditiei (16.113), din ecuatiile (16.115) se pot determina, pentru t = t0 , valorileconstantelor ak ; k = 1, . . . , n ın functie de valorile initiale (q0, p0) . Apoi, rezolvand sistemul(16.116) ın raport cu qk ; k = 1, . . . , n , se obtine solutia finala a ecuatiilor de miscare :
qk = qk(t, a, b) ; k = 1, . . . , n (16.117)
Sa mai observam ca ıntrucat primele (n − 1) ecuatii (16.116) nu contin explicit timpul,este posibila exprimarea unui numar de (n − 1) coordonate ın functie de coordonata qn
aleasa arbitrar. Se obtine astfel ecuatia traiectoriei miscarii ın spatiul configuratiilor Λn .In miscarea bidimensionala, procedeul este analog cu gasirea directa a ecuatiei traiectorieiy = y(x) , fara a fi cunoscute ın prealabil ecuatiile parametrice x = x(t) si y = y(t) din caresa fie eliminat ulterior timpul.
Spre deosebire de functia principala S a lui Hamilton care era functia generatoare a uneitransformari canonice univalente ın urma careia noile coordonate si impulsuri erau constante,functia caracteristica W a lui Hamilton este functia generatoare a unei transformari canoniceunivalente ın urma careia noile coordonate devin ciclice ın raport cu noul hamiltonian K .Intr-adevar, examinam transformarea ın urma careia noile impulsuri devin niste constante ale
16.2. METODA HAMILTON-JACOBI 443
miscarii Pk = ak ; k = 1, . . . , n , constanta an fiind chiar H = h . Notand functia generatoarecu W = W (q, P ) = W (q, a) , ecuatiile care definesc transformarea canonica vor fi :
pk =∂W
∂qk
, Qk =∂W
∂Pk
=∂W
∂ak
; k = 1, . . . , n (16.118)
Conditia suplimentara an = H(q, p) devine :
H
(q1, . . . , qn,
∂W
∂q1
, . . . ,∂W
∂qn
)= an (16.119)
adica tocmai ecuatia (16.111), iar primul grup de ecuatii (16.118) coincide cu (16.115).Deoarece timpul nu figureaza explicit ın functia generatoare, noul hamiltonian coincide cuvechiul hamiltonian, care reprezinta chiar integrala energiei :
K = an = h (16.120)
Ecuatiile canonice pentru noile variabile vor fi :
Pk = − ∂K
∂Qk
= 0 , Qk =∂K
∂Pk
=∂K
∂ak
=
0 , k = 1, . . . , n− 1
1 , k = n(16.121)
si au solutiile :Pk = ak ; k = 1, . . . , n
Qk =
bk =∂W
∂ak
; k = 1, . . . , n− 1
t + bn = +∂W
∂h(an ≡ h)
(16.122)
unde s-a tinut cont de (16.118). Astfel, toate impulsurile si toate coordonatele, cu exceptiaultimei, sunt niste constante. Ultimul grup de ecuatii (16.122) coincide cu (16.116).
Un alt caz ın care ecuatia Hamilton-Jacobi capata o forma simpla, corespunde situatieiın care un numar de coordonate qα ; α = m + 1, . . . , n sunt ciclice :
H = H(t, q1, . . . , qm, p1, . . . , pn) , pα = aα ; α = m + 1, . . . , n (16.123)
Deoarece :
pα =∂S
∂qα
= aα ; α = m + 1, . . . , n (16.124)
functia principala a lui Hamilton va avea forma generala :
S =n∑
α=m+1
aα qα + S0(t, q1, . . . , qm, a1, . . . , an) (16.125)
Pentru functia S0 se obtine ecuatia :
∂S0
∂t+ H
(t, q1, . . . , qm,
∂S0
∂q1
, . . . ,∂S0
∂qm
, am+1, . . . , an
)= 0 (16.126)

444 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
care corespunde unui sistem canonic cu 2m variabile, asa cum arata si rezultatele obtinutela studiul sistemelor avand un numar de n−m coordonate ciclice.
Daca hamiltonianul sistemului nu depinde explicit de timp si ın plus un numar de coor-donate sunt ciclice, atunci integrala completa a ecuatiei Hamilton-Jacobi are forma :
S = −h t +n∑
α=m+1
aα qα + W0(q1, . . . , qm, a1, . . . , am−1, h, am+1, . . . , an) (16.127)
functia W0 fiind integrala completa a ecuatiei :
H
(t, q1, . . . , qm,
∂W0
∂q1
, . . . ,∂W0
∂qm
, am+1, . . . , an
)= h (16.128)
16.2.2 Metoda separarii variabilelor
Teorema Hamilton-Jacobi ısi dovedeste utilitatea practica numai daca poate fi gasitao integrala completa a ecuatiei Hamilton-Jacobi fara a se recurge la sistemul caracteristicasociat ecuatiei respective, care nu este altul decat sistemul canonic pentru care se cautasolutia. O metoda foarte des utilizata ın fizica pentru determinarea integralei complete, estemetoda separarii variabilelor . Pentru a nu complica expunerea, vor fi considerate doarsistemele mecanice al caror hamiltonian nu depinde explicit de timp, deci pentru care :
H(q1, . . . , qn, p1, . . . , pn) = h (16.129)
In acest caz integrala completa a ecuatiei Hamilton-Jacobi se scrie :
S = −h t + W (q1, . . . , qn, a1, . . . , an) ; an ≡ h (16.130)
unde W este o integrala completa a ecuatiei reduse Hamilton-Jacobi :
H
(q1, . . . , qn,
∂W
∂q1
, . . . ,∂W
∂qn
)= h (16.131)
Metoda separarii variabilelor consta ın cautarea unei solutii a ecuatiei (16.131) sub forma :
W =n∑
k=1
Wk(qk, a1, . . . , an) (16.132)
In aceasta situatie, se va putea scrie :
pk =∂S
∂qk
=∂W
∂qk
=∂Wk
∂qk
; k = 1, . . . , n (16.133)
si atunci printr-o alegere adecvata a constantelor , ecuatia (16.131) poate fi divizataıntr-un sistem echivalent de n ecuatii, avand forma :
fk
(qk,
∂Wk
∂qk
, a1, . . . , an
)= ak ; k = 1, . . . , n (16.134)

16.2. METODA HAMILTON-JACOBI 445
Acestea sunt niste ecuatii diferentiale ordinare ın variabilele qk ; k = 1, . . . , n . Daca suntındeplinite conditiile :
∂fk
∂pk
6= 0 ; k = 1, . . . , n (16.135)
ecuatiile (16.134) pot fi rezolvate ın raport cu∂Wk
∂qk
; k = 1, . . . , n , rezultand ın final pentru
Wk ; k = 1, . . . , n niste cuadraturi :
pk =∂Wk
∂qk
= Fk(qk, a1, . . . , an) =⇒ Wk =∫
Fk(qk, a1, . . . , an) dqk ; k = 1, . . . , n
(16.136)Folosind (16.132), integrala completa a ecuatiei Hamilton-Jacobi se va scrie :
S = −h t +n∑
k=1
∫Fk(qk, a1, . . . , an) dqk (16.137)
Bineınteles, procedeul descris nu este realizabil ıntotdeauna si chiar ın cazul unor sistememecanice care admit o integrala completa de forma (16.137), esentiala ramane alegerea setuluide variabile independente ın care se lucreaza. De exemplu, ın cazul problemei miscariiın camp central, folosirea coordonatelor sferice permite separarea variabilelor, ın schimbfolosirea coordonatelor carteziene nu permite acest lucru.
In cele ce urmeaza, sunt examinate doua forme particulare ale hamiltonianului H , careadmit integrale complete de forma (16.137).
a) Situatia cea mai simpla se realizeaza daca variabilele sunt separate ın ınsasi struc-tura lui H , ca de exemplu ın expresia hamiltonianului oscilatorului aromic tridimensional
anizotrop H =3∑
i=1
(p2
i
2m+
kiq2i
2
):
H = H [ f1 (q1, p1) , . . . , fn (qn, pn) ] (16.138)
Fiecare functie fk contine perechea de variabile qk , pk ; k = 1, . . . , n si ın plus sunt ındepliniteconditiile (16.135). Ecuatia redusa Hamilton-Jacobi se va scrie sub forma :
H
[f1
(q1,
∂W
∂q1
), . . . , fn
(qn,
∂W
∂qn
)]= h (16.139)
Cautand solutia sub forma sumei (16.132), ecuatia (16.139) va fi satisfacuta numai daca :
fk (qk, pk) = ak , pk =∂Wk
∂qk
; k = 1, . . . , n (16.140)
ıntre constantele ak ; k = 1, . . . , n existand legatura evidenta :
H (a1, . . . , an) = h (16.141)
In baza conditiilor (16.135), ecuatiile (16.140) pot fi rezolvate ın raport cu pk ; k = 1, . . . , n :
pk =∂Wk
∂qk
= Fk(qk, ak) =⇒ Wk =∫
Fk(qk, ak) dqk ; k = 1, . . . , n (16.142)

446 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
si integrala completa a ecuatiei reduse Hamilton-Jacobi se va scrie :
W =n∑
k=1
∫Fk(qk, ak) dqk (16.143)
iar integrala completa a ecuatiei Hamilton-Jacobi va fi :
S = −H(a1, . . . , an) t +n∑
k=1
∫Fk(qk, ak) dqk (16.144)
Functia S astfel determinata va trebui, prin definitie, sa ındeplineasca conditia (16.103).Intr-adevar, deoarece ın acest caz :
∂2S
∂qk∂ak
=∂Fk
∂ak
; k = 1, . . . , n
∂2S
∂qk∂aj
= 0 ; k 6= j ; k, j = 1, . . . , n
(16.145)
rezulta :
det
(∂2S
∂qk∂aj
)=
n∏
k=1
∂Fk
∂ak
=n∏
k=1
(∂fk
∂pk
)−1
pk=Fk(qk,ak)
6= 0 (16.146)
La deducerea ultimului rezultat s-a tinut cont de faptul ca ınlocuind (16.142) ın (16.140) siderivand ın raport cu ak ; k = 1, . . . , n , se obtine :
(∂fk
∂pk
)
pk=Fk(qk,ak)
·(
∂Fk
∂ak
)= 1 ; k = 1, . . . , n (16.147)
Odata cunoscuta functia S , aplicand teorema Hamilton-Jacobi se determina ecuatiilefinale ale miscarii sistemului mecanic :
pk =∂S
∂qk
, bk =∂S
∂ak
; k = 1, . . . , n (16.148)
Tinand cont de (16.144) si (16.147) se vor obtine ecuatiile :
pk = Fk(qk, ak)
bk = − ∂H
∂ak
t +∫ dqk(
∂fk
∂pk
)
pk=Fk(qk,ak)
; k = 1, . . . , n (16.149)
b) Metoda separarii variabilelor poate fi aplicata si daca H are forma generala :
H = fn . . . f3 f2 [ f1 (q1, p1) , q2, p2 ] , q3, p3 , . . . , qn, pn (16.150)
fiind indeplinite si conditiile suplimentare (16.135). Un hamiltonian cu o astfel de structuraeste cel care descrie miscarea ın camp central a unui corp de masa m , cand sunt folosite co-
ordonate sferice : H =1
2m
[p2
r +1
r2
(p2
θ +p2
ϕ
sin2 θ
)]+ V (r) . Pentru hamiltonianul (16.150),
ecuatia redusa Hamilton-Jacobi va avea forma :
fn
. . . f3
f2
[f1
(q1,
∂W
∂q1
), q2,
∂W
∂q2
], q3,
∂W
∂q3
, . . . , qn,
∂W
∂qn
= h (16.151)

16.2. METODA HAMILTON-JACOBI 447
Cautand solutia sub forma sumei (16.132), pot fi facute notatiile evidente :
f1 (q1, p1) = a1
f2 (a1, q2, p2) = a2
f3 (a2, q3, p3) = a3
...fn (an−1, qn, pn) = an (≡ h)
, pk =∂Wk
∂qk
; k = 1, . . . , n (16.152)
Rezolvand aceste ecuatii ın raport cu impulsurile generalizate, rezulta :
p1 =∂W1
∂q1
= F1(q1, a1) =⇒ W1 =∫
F1(q1, a1) dq1
p2 =∂W2
∂q2
= F1(q2, a1, a2) =⇒ W2 =∫
F2(q2, a1, a2) dq2
p3 =∂W3
∂q3
= F3(q3, a2, a3) =⇒ W3 =∫
F3(q3, a2, a3) dq3
...
pn =∂Wn
∂qn
= Fn(qn, an−1, an) =⇒ Wn =∫
Fn(qn, an−1, an) dqn
(16.153)
In consecinta, integrala completa a ecuatiei reduse Hamilton-Jacobi se va scrie :
W =n∑
k=1
∫Fk(qk, ak−1, ak) dqk (16.154)
iar integrala completa a ecuatiei Hamilton-Jacobi va fi :
S = −h t +n∑
k=1
∫Fk(qk, ak−1, ak) dqk (16.155)
Si ın acest caz se poate verifica ca :
∂2S
∂qk∂ak
=∂Fk
∂ak
; k = 1, . . . , n
∂2S
∂qk∂aj
= 0 ; k < j ; k, j = 1, . . . , n
(16.156)
deci :
det
(∂2S
∂qk∂aj
)=
n∏
k=1
∂Fk
∂ak
=n∏
k=1
(∂fk
∂pk
)−1
pk=Fk(qk,ak−1,ak)
6= 0 (16.157)
deoarece conform (16.152) si (16.153) rezulta :
(∂fk
∂pk
)
pk=Fk(qk,ak−1,ak)
·(
∂Fk
∂ak
)= 1 ; k = 1, . . . , n (16.158)

448 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Avand ın vedere solutia (16.155), aplicand teorema Hamilton-Jacobi vor rezulta ecuatiilede miscare ale sistemului mecanic considerat :
pk = Fk(qk, ak−1, ak) ; k = 1, . . . , n (16.159)
si :
bk =∫ dqk(
∂fk
∂pk
)
pk=Fk(qk,ak−1,ak)
−∫
(∂fk+1
∂ak
)dqk+1
(∂fk+1
∂pk+1
)
pk+1=Fk+1(qk+1,ak,ak+1)
;
k = 1, . . . , n− 1
bn = − t +∫ dqn(
∂fn
∂pn
)
pn=Fn(qn,an−1,an)
(16.160)
unde s-a tinut cont de (16.158) si de relatia evidenta :
(∂fk+1
∂ak
)+
(∂fk+1
∂pk+1
)
pk+1=Fk+1(qk+1,ak,ak+1)
·(
∂Fk+1
∂ak
)= 0 ; k = 1, . . . , n− 1 (16.161)
Se observa ca primele (n − 1) ecuatii din (16.160) reprezinta ecuatia traiectoriei sis-temului ın spatiul configuratiilor, ea continand un numar de (2n − 1) constante arbitrarea1, . . . , an, b1, . . . , bn−1 . Ultima ecuatie, care contine constanta arbitrara bn , leaga coordona-tele qk ; k = 1, . . . , n de variabila t . Odata determinate functiile qk(t, a, b) ; k = 1, . . . , ndin ecuatiile (16.160), ele pot fi ınlocuite ın ecuatiile (16.159) pentru a obtine functiilepk(t, a, b) ; k = 1, . . . , n si astfel problema determinarii miscarii este ıncheiata.
Aplicatii
1. Sa se deduca ecuatiile de miscare ale unui punct material de masa m care se misca ıncamp gravitational omogen, folosind metoda Hamilton-Jacobi.
Rezolvare : Hamiltonianul sistemului fiind :
H =1
2m
(p2
x + p2y + p2
z
)+ mgz (1)
ecuatia Hamilton-Jacobi va avea expresia :
∂S
∂t+
1
2m
(∂S
∂x
)2
+
(∂S
∂y
)2
+
(∂S
∂z
)2 + mgz = 0 (2)
Va fi cautata o integrala completa de forma :
S = −h t + ax x + ay y + W (z, az) (3)

16.2. METODA HAMILTON-JACOBI 449
unde functia W va fi o solutie a ecuatiei :
1
2m
a2
x + a2y +
(dW
dz
)2 + mgz = h (4)
Efectuand notatia :1
2m
(dW
dz
)2
+ mgz =a2
z
2m(5)
va trebui ındeplinita conditia :1
2m
(a2
x + a2y + a2
z
)= h (6)
iar ecuatia (5) va avea solutia :
W =∫ √
a2z − 2m2gz dz (7)
Integrala completa (3) devine :
S = −h t + ax x + ay y +∫ √
a2z − 2m2gz dz (8)
Din primul grup al ecuatiilor Hamilton-Jacobi :
px =∂S
∂x= ax , py =
∂S
∂y= ay , pz =
∂S
∂z=
√a2
z − 2m2gz (9)
prin impunerea conditiilor initiale, va rezulta ca :
ax = mv0x , ay = mv0
y , az = m√
v0z + 2gz (10)
Tinand cont de (6), al doilea grup al ecuatiilor Hamilton-Jacobi va conduce la expresiile :
bx =∂S
∂ax
= − ax
mt + x , by =
∂S
∂ay
= − ay
mt + y
bz =∂S
∂az
= − az
mt + az
∫ dz√a2
z − 2m2gz= − az
mt− az
m2g
√a2
z − 2m2gz(11)
Facand t = t0 si folosind expresiile (10) se vor obtine ın final binecunoscutele ecuatii de miscare :
x = x0 + v0x (t− t0)
y = y0 + v0y (t− t0)
z = z0 + v0z (t− t0)− 1
2g (t− t0)
2
(12)
2. Sa se studieze miscarea oscilatorului armonic anizotrop folosind metoda Hamilton-Jacobi.

450 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Rezolvare : Deoarece hamiltonianul oscilatorului armonic anizotrop are expresia :
H =3∑
i=1
(p2
i
2m+
1
2mω2
i q2i
), ωi =
√ki
m; i = 1, 2, 3 (1)
ecuatia Hamilton-Jacobi va avea forma :
∂S
∂t+
3∑
i=1
1
2m
(∂S
∂qi
)2
+1
2mω2
i q2i
= 0 (2)
Deoarece∂H
∂t= 0 , integrala completa a ecuatiei (2) se scrie :
S = −h t + W (q1, q2, q3, a1, a2, a3) (3)
unde W este integrala completa a ecuatiei reduse Hamilton-Jacobi :
3∑
i=1
1
2m
(∂W
∂qi
)2
+1
2mω2
i q2i
= h (4)
Cautand o solutie sub forma W =3∑
i=1
Wi(qi, ai) , ecuatia (4) poate fi satisfacuta numai daca :
1
2m
(dWi
dqi
)2
+1
2mω2
i q2i = ai ; i = 1, 2, 3 (5)
cu conditia :a1 + a2 + a3 = h (6)
Din (5) rezulta :
Wi =∫ √
2mai −m2ω2i q
2i dqi = mωi
∫ √2ai
mω2i
− q2i dqi ; i = 1, 2, 3 (7)
integrala completa a ecuatiei (2) avand astfel forma generala :
S = −h t +3∑
i=1
mωi
∫ √2ai
mω2i
− q2i dqi (8)
Conform teoremei Hamilton-Jacobi, solutia sistemului canonic va fi data de ecuatiile :
pi =∂S
∂qi
= mωi
√2ai
mω2i
− q2i
bi =∂S
∂ai
= − t +1
ωi
∫ dqi√2ai
mω2i
− q2i
; i = 1, 2, 3 (9)

16.2. METODA HAMILTON-JACOBI 451
Folosind formula∫ dx√
a2 − x2= arcsin
x
a+ C , va rezulta ın final :
qi =
√2ai
mω2i
sin (ωit + bi)
pi =√
2mai cos (ωit + bi)
; i = 1, 2, 3 (10)
constantele ai , bi ; i = 1, 2, 3 urmand a fi determinate din conditiile initiale.
3. Folosind metoda Hamilton-Jacobi, sa se studieze miscarea unui punct de masa m ın campul
de forte care deriva din potentialul V = − k
r; k > 0 (miscarea kepleriana).
Rezolvare : In coordonate sferice, hamiltonianul problemei are expresia :
H =1
2m
[p2
r +1
r2
(p2
θ +p2
ϕ
sin2 θ
)]− k
r, k > 0 (1)
iar ecuatia Hamilton-Jacobi va avea forma :
∂S
∂t+
1
2m
(∂S
∂r
)2
+1
r2
(∂S
∂θ
)2
+1
sin2 θ
(∂S
∂ϕ
)2
− k
r= 0 (2)
Observand ca t si ϕ nu intervin explicit ın hamiltonian, o integrala completa a ecuatiei (2) va fi :
S = −h t + aϕ ϕ + W (r, θ, ar, aθ) (3)
unde W este o integrala completa a ecuatiei :
1
2m
(∂W
∂r
)2
+1
r2
(∂W
∂θ
)2
+a2
ϕ
sin2 θ
− k
r= h (4)
Cautand solutia sub forma W = Wr + Wθ , va trebui ca :
(dW
dθ
)2
+a2
ϕ
sin2 θ= aθ ,
1
2m
(dW
dr
)2
+aθ
r2
− k
r= ar = h (5)
de unde rezulta :
Wθ =∫ √
aθ −a2
ϕ
sin2 θdθ , Wr =
∫ √√√√2m
(h +
k
r
)− aθ
r2dr (6)
Integrala completa a ecuatiei (2) va avea expresia :
S = −h t + aϕ ϕ +∫ √
aθ −a2
ϕ
sin2 θdθ +
∫ √√√√2m
(h +
k
r
)− aθ
r2dr (7)

452 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Aplicand teorema Hamilton-Jacobi, vor rezulta ecuatiile :
pr =∂S
∂r=
√√√√2m
(h +
k
r
)− aθ
r2, pθ =
∂S
∂θ=
√aθ −
a2ϕ
sin2 θ, pϕ =
∂S
∂θ= aϕ
bϕ =∂S
∂aϕ
= ϕ− aϕ
∫ dθ
sin2 θ
√aθ −
a2ϕ
sin2 θ
bθ =∂S
∂aθ
=1
2
∫ dθ√aθ −
a2ϕ
sin2 θ
− 1
2
∫ dr
r2
√√√√2m
(h +
k
r
)− aθ
r2
br =∂S
∂ar
=∂S
∂h= −t +
∫ mdr√√√√2m
(h +
k
r
)− aθ
r2
(8)
Daca la momentul initial viteza particulei este ın planul meridian ϕ = ϕ0 , atunci
(dϕ
dθ
)
t0
= 0
si deci aϕ = 0 . Rezulta ca ϕ(t) = bϕ = ϕ0 , ceea ce ınseamna ca miscarea are loc ın planulmeridian. Din ultimele doua ecuatii, prin diferentiere, rezulta :
mr2θ =√
aθ (= L0 = 2m|Ω0|) (9)
ceea ce ınseamna ca ın planul ϕ = ϕ0 miscarea se face cu viteza areolara constanta.
Cu schimbarea u =1
r; du = − dr
r2, din penultima ecuatie rezulta :
bθ =θ
2L0 +1
2
u∫
u0
du√2mh + 2mku− L0 2u2
(10)
adica :
−u∫
u0
du√2mh
L02 +2mk
L0 2 u− u2
= θ − θ0 unde θ0 = 2 L02bθ (11)
Efectuand calculele si facand θ → π
2− θ , se obtine :
u =mk
L0 2
1 +
√1 +
2mhL02
m2k2cos (θ − θ1)
(12)
Revenind la variabila r si facand notatiile :
p =L0 2
mk, e =
√1 +
2hL0 2
mk2(13)
se obtine ın final solutia binecunoscuta pentru traiectorie :
r =p
1 + e cos (θ − θ1)(14)
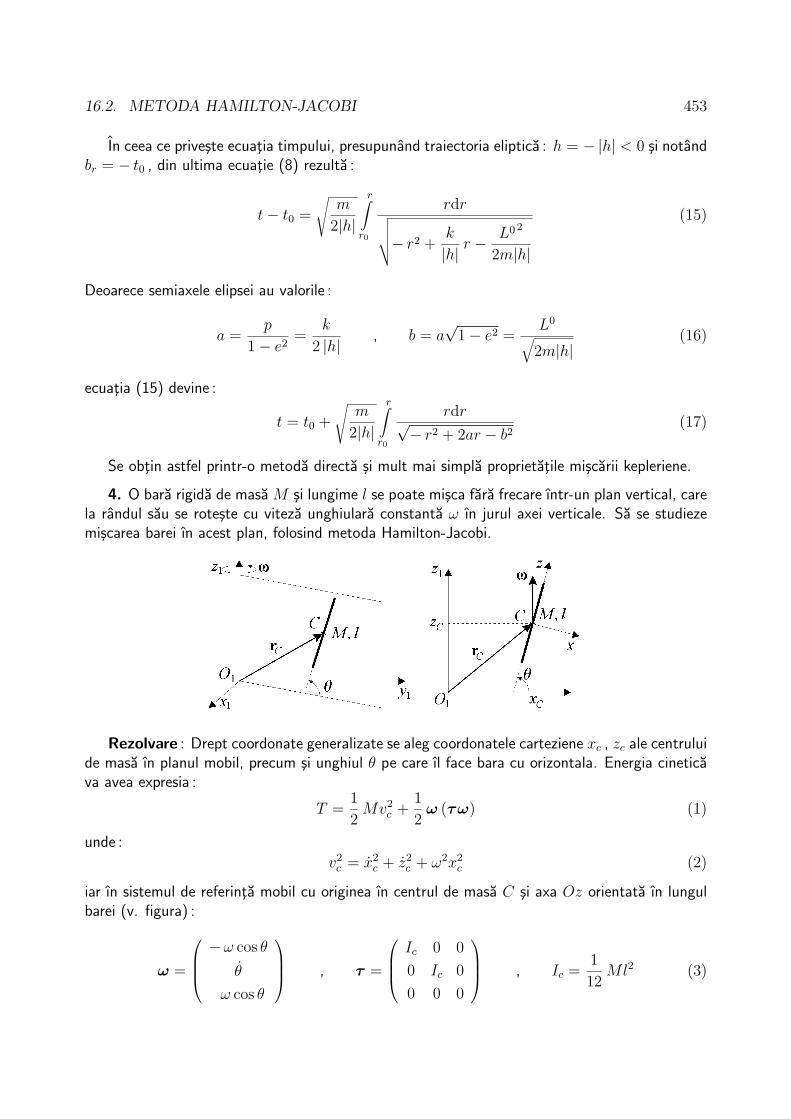
16.2. METODA HAMILTON-JACOBI 453
In ceea ce priveste ecuatia timpului, presupunand traiectoria eliptica : h = − |h| < 0 si notandbr = − t0 , din ultima ecuatie (8) rezulta :
t− t0 =
√m
2|h|r∫
r0
rdr√√√√− r2 +k
|h| r −L0 2
2m|h|
(15)
Deoarece semiaxele elipsei au valorile :
a =p
1− e2=
k
2 |h| , b = a√
1− e2 =L0
√2m|h|
(16)
ecuatia (15) devine :
t = t0 +
√m
2|h|r∫
r0
rdr√− r2 + 2ar − b2
(17)
Se obtin astfel printr-o metoda directa si mult mai simpla proprietatile miscarii kepleriene.
4. O bara rigida de masa M si lungime l se poate misca fara frecare ıntr-un plan vertical, carela randul sau se roteste cu viteza unghiulara constanta ω ın jurul axei verticale. Sa se studiezemiscarea barei ın acest plan, folosind metoda Hamilton-Jacobi.
Rezolvare : Drept coordonate generalizate se aleg coordonatele carteziene xc , zc ale centruluide masa ın planul mobil, precum si unghiul θ pe care ıl face bara cu orizontala. Energia cineticava avea expresia :
T =1
2Mv2
c +1
2ω (τω) (1)
unde :
v2c = x2
c + z2c + ω2x2
c (2)
iar ın sistemul de referinta mobil cu originea ın centrul de masa C si axa Oz orientata ın lungulbarei (v. figura) :
ω =
−ω cos θ
θ
ω cos θ
, τ =
Ic 0 0
0 Ic 0
0 0 0
, Ic =
1
12Ml2 (3)

454 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Facand ınlocuirile, va rezulta expresia :
T =1
2M
(x2
c + z2c +
1
12l2θ2
)+
1
2Mω2
(x2
c +1
12l2 cos2 θ
)(4)
Deoarece :
px =∂T
∂xc
= Mxc , pz =∂T
∂zc
= Mzc , pθ =∂T
∂θ=
1
12Ml2θ (5)
pentru hamiltonianul problemei se va obtine :
H =_T 2 −T0 + V =
1
2M
(p2
x + p2z +
12
l2p2
θ
)− 1
2Mω2
(x2
c +1
12l2 cos2 θ
)+ Mgzc (6)
Ecuatia Hamilton-Jacobi va avea forma :
∂S
∂t+
1
2M
(∂S
∂xc
)2
+
(∂S
∂zc
)2
+12
l2
(∂S
∂θ
)2− 1
2Mω2
(x2
c +1
12l2 cos2 θ
)+ Mgzc = 0 (7)
Integrala completa a ecuatiei (7) va fi :
S = −h t + W (xc, zc, θ, ax, az, aθ) (8)
functia W fiind o solutie a ecuatiei :
1
2M
(∂W
∂xc
)2
+
(∂W
∂zc
)2
+12
l2
(∂W
∂θ
)2− 1
2Mω2
(x2
c +1
12l2 cos2 θ
)+ Mgzc = h (9)
Folosind metoda separarii variabilelor W = Wx + Wz + Wθ si facand notatiile :
1
2M
(dWx
dxc
)2
− 1
2Mω2x2
c = ax
1
2M
(dWz
dzc
)2
+ Mgzc = az
6
Ml2
(dWθ
dθ
)2
− 1
24Ml2ω2 cos2 θ = aθ
(10)
va rezulta :
S = −h t +∫ √
2M(ax +
1
2Mω2x2
c
)dxc +
∫ √2M (az −Mgzc) dzc +
+∫ √
Ml2
6
(aθ +
1
24Ml2ω2 cos2 θ
)dθ
(11)
unde :ax + az + aθ = h (12)

16.2. METODA HAMILTON-JACOBI 455
Aplicand teorema Hamilton-Jacobi, pentru impulsuri se obtin ecuatiile :
px =∂S
∂xc
=
√2M
(ax +
1
2Mω2x2
c
)
pz =∂S
∂zc
=√
2M (az −Mgzc)
pθ =∂S
∂θ=
√Ml2
6
(aθ +
1
24Ml2ω2 cos2 θ
)(13)
Ecuatiile de miscare propriu-zise vor avea forma generala :
bx =∂S
∂ax
= − t +∫ dxc√
2
M
(ax +
1
2Mω2x2
c
)
bz =∂S
∂az
= − t +∫ dzc√
2
M(az −Mgzc)
bθ =∂S
∂aθ
= − t +∫ dθ√
24
Ml2
(aθ +
1
24Ml2ω2 cos2 θ
)
(14)
Din prima ecuatie, folosind formula∫ dx√
a2 + x2= argsh
x
a+ C , va rezulta :
xc =1
ω
√2ax
Msh (t + bx) (15)
Cea de a doua ecuatie (14) va conduce la solutia :
zc =az
Mg− gb2
z
2− gbzt− 1
2gt2 (16)
Prin derivare, din ultima ecuatie (14) rezulta :
θ2 =24aθ
Ml2+ ω2 cos2 θ (17)
Facand schimbarea θ =ϕ
2, va rezulta ın final ecuatia :
ϕ + ω2 sin ϕ = 0 (18)
care reprezinta ecuatia de miscare a unui pendul matematic de lungime l′ =g
ω2.
Constantele ax , az , aθ , bx , bz , bθ , ın care sunt incluse si constantele de integrare, pot fideterminate din conditiile initiale.

456 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
16.2.3 Variabilele actiuni-unghiuri
In o serie de capitole ale fizicii un rol deosebit ıl joaca sistemele a caror miscare este perio-dica. Studiind astfel de sisteme ne intereseaza adesea nu o serie de detalii privind traiectoriilepunctelor ce alcatuiesc sistemul, cat frecventele acestor miscari. Metoda Hamilton-Jacobine pune la ındemana un procedeu de determinare a frecventelor miscarilor periodice faraa determina ın prealabil miscarea acestora si care consta ın folosirea unor variabile numiteactiuni-unghiuri. Inainte de a introduce aceste variabile, este necesar sa se defineasca sensulexact al termenului de miscare periodica.
Figura 16.2: Exemple de miscari periodice
Prin miscare periodica a unui sistem mecanic se ıntelege fie miscarea ın cursul careiafiecare pereche de variabile qk(t) , pk(t) variaza periodic ın timp cu aceeasi perioada Tk , fiemiscarea ın cursul careia fiecare impuls pk este o functie periodica de coordonata cores-punzatoare qk (cu perioada Qk), chiar daca aceasta din urma nu este o functie periodicade timp. In primul caz, proiectia traiectoriei punctului figurativ ıntr-un plan (qk, pk) dinspatiul fazelor va fi o curba ınchisa, iar ın cel de al doilea caz, proiectia respectiva va fi ocurba deschisa a carei forma se repeta periodic. Prima forma de miscare periodica poartanumele de libratie , exemplul tipic constituindu-l miscarea oscilatorului liniar armonic, iar adoua forma de miscare periodica poarta numele de rotatie , exemplul tipic reprezentandu-lmiscarea de rotatie a rigidului ın jurul unei axe fixe. Ambele forme de miscare periodica potfi regasite ın cursul studiului miscarii aceluiasi sistem mecanic. Astel, ın cazul pendululuimatematic de lungime l , functia lui Hamilton are expresia :
H =p2
θ
2ml2−mgl cos θ (16.162)
si deoarece sistemul este conservativ (H = h), rezulta ca :
pθ =√
2ml2 (h + mgl cos θ) (16.163)
ceea ce reprezinta ecuatia traiectoriei punctului reprezentativ ın spatiul fazelor (θ, pθ) . Daca
h < mgl , miscarea sistemului este posibila doar pentru |θ| < θ′ unde θ′ = arcos
(− h
mgl
)
si pendulul va efectua oscilatii ıntre limitele −θ′ si θ′ . Daca ınsa h > mgl , atunci toate

16.2. METODA HAMILTON-JACOBI 457
valorile lui θ vor fi fizic posibile, unghiul θ poate creste nelimitat si conform (16.163) punctulmaterial va efectua o miscare periodica de tipul rotatiei.
In cele ce urmeaza va fi studiata miscarea periodica a unui sistem conservativ ,pentru care integrala completa a ecuatiei Hamilton-Jacobi este :
S = −h t + W (q1, . . . , qn, a1, . . . , an) , an ≡ h (16.164)
iar W este integrala completa a ecuatiei reduse Hamilton-Jacobi :
H
(q1, . . . , qn,
∂W
∂q1
, . . . ,∂W
∂qn
)= h (16.165)
Daca sistemul este separabil , sau daca ın urma unei transformari canonice el poate fi redusla un sistem separabil, atunci integrala completa a ultimei ecuatii este de forma :
W =n∑
k=1
Wk(qk, a1, . . . , an) (16.166)
si de asemenea, prin procedeul descris ın §16.2.2 , impulsurile pot fi exprimate ın functie decoordonatele corespunzatoare si de cele n constante arbitrare ak :
pk =∂W
∂qk
=∂Wk
∂qk
= Fk(qk, a1, . . . , an) ; k = 1, . . . , n (16.167)
Acestea reprezinta ecuatiile proiectiilor traiectoriei punctului figurativ ın planele (qk, pk) ;k = 1, . . . , n , miscarea fiind periodica daca curbele (16.167) sunt ınchise sau periodice ınraport cu qk ; k = 1, . . . , n . Exista posibilitatea ca perioadele miscarilor ın fiecare plan(qk, pk) ; k = 1, . . . , n sa nu fie obligator aceleasi. Daca aceste perioade sunt incomensurabile,atunci miscarea globala a sistemului va fi cuasiperiodica , deoarece traiectoriile punctelorsistemului ın spatiul fizic vor fi curbe deschise. De exemplu, ın cazul oscilatorului armonicanizotrop, daca perioadele sunt comensurabile, traiectoria punctului va fi descrisa de figurilelui Lissajous care sunt niste curbe ınchise, pe cand daca perioadele sunt incomensurabile,traiectoria ın spatiul fizic este o curba deschisa.
Prin definitie se introduc variabilele :
Jk =∮
pk dqk ; k = 1, . . . , n (16.168)
numite actiuni , integralele fiind calculate pe o perioada completa de variatie a lui qk ; k =1, . . . , n . Este evident ca aceste marimi reprezinta niste arii. Avand ın vedere relatiile(16.167), din (16.168) rezulta :
Jk = Jk(a1, . . . , an) ; k = 1, . . . , n (16.169)
de unde se vede ca fiecare din marimile Jk este functie de cele n constante ak care intervinın integrala completa a ecuatiei Hamilton-Jacobi. Deoarece functiile (16.167) pentru k =1, . . . , n sunt independente, rezulta ca si marimile Jk ; k = 1, . . . , n sunt independente, asaıncat formulele (16.169) se pot inversa :
ak = ak(J1, . . . , Jn) ; k = 1, . . . , n (16.170)
458 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Inlocuind aceste expresii ın integrala completa a ecuatiei reduse Hamilton-Jacobi, se obtine :
W = W (q1, . . . , qn, J1, . . . , Jn) (16.171)
Pe de alta parte, sistemul fiind conservativ, va trebui ca H = h . Deoarece constanteleak ; k = 1, . . . , n au fost alese astfel ıncat an = h , din (16.170) rezulta ca functia H vadepinde doar de constantele Jk ; k = 1, . . . , n :
H = h = an = K(J1, . . . , Jn) (16.172)
Tinand cont de observatia din §16.2.1 , anume ca functia caracteristica W a lui Hamiltoneste o functie generatoare de tipul S2(q, P ) care defineste o transformare canonica univalentaın urma careia toate noile impulsuri devin niste constante, din (16.171) si (16.172) rezultaca functia W (q, J) poate fi privita ca functia generatoare a transformarii canonice ın urmacareia noile impulsuri sunt constantele Jk ; k = 1, . . . , n , noul hamiltonian (16.172) fiindfunctie doar de aceste noi impulsuri, deoarece noile coordonate devin ciclice. Notand acestenoi coodonate cu wk ; k = 1, . . . , n si numindu-le unghiuri , ele vor fi definite de ecuatiile :
wk =∂W (q, J)
∂Jk
; k = 1, . . . , n (16.173)
Scriind sistemul canonic pentru noile variabile actiuni-unghiuri, rezulta :
wk =∂K(J)
∂Jk
= νk(J) , Jk = − ∂K
∂wk
= 0 ; k = 1, . . . , n (16.174)
unde νk(J1, . . . , Jn) ; k = 1, . . . , n sunt niste constante. Din primul grup de ecuatii (16.174)rezulta ca marimile wk ; k = 1, . . . , n sunt niste functii liniare de timp :
wk = νk t + βk ; k = 1, . . . , n (16.175)
Din ecuatiile (16.173) si (16.175) pot fi determinate direct coordonatele qk ; k = 1, . . . , n cafunctii de t si de constantele νk , βk ; k = 1, . . . , n .
Pentru a gasi sensul fizic al constantelor νk ; k = 1, . . . , n , admitem ca coordonata qk
efectueaza un ciclu complet de variatie (libratie sau rotatie), ın timp ce celelalte coordonateraman nemodificate. Notand cu ∆wj variatia unei coordonate wj pe ciclu si tinand cont de(16.173), rezulta :
∆wj =∮ ∂wj
∂qk
dqk =∮ ∂2W
∂qk∂Jj
dqk =∂
∂Jj
∮ ∂W
∂qk
dqk =∂
∂Jj
∮pk dqk =
∂Jk
∂Jj
= δkj (16.176)
unde s-a folosit definitia (16.168). Egalitatea obtinuta arata ca pe ciclul de variatie conside-rat, doar coordonate wk sufera o variatie (egala cu unitatea), celelalte coordonate wj (j 6= k)ramanand nemodificate. Notand cu Tk perioada unui ciclu de variatie a lui qk , din (16.175)se obtine :
∆wk = νk Tk = 1 adica νk =1
Tk
(16.177)
In concluzie, constanta νk este egala cu frecventa de variatie a lui qk . Acesta este motivulpentru care folosirea variabilelor actiuni-unghiuri permite determinarea frecventelor unei

16.2. METODA HAMILTON-JACOBI 459
miscari periodice fara a mai fi necesar studiul complet al miscarii sistemului. Cunoscandapriori ca sistemul este periodic, ın prima etapa vor fi definite functiile (16.167) si actiunile(16.168) ; ın etapa a doua se vor determina constantele ak ; k = 1, . . . , n si hamiltonianulsistemului ın functie de actiuni folosind formulele (16.170) si (16.172) ; iar ın final, avand ınvedere primul grup de ecuatii (16.174), se vor obtine frecventele νk prin simple derivari.
Denumirea de variabile ”unghiuri” pentru noile coordonate wk este justificata de fap-tul ca marimile νk din ecuatiile (16.175) reprezinta niste frecvente. In plus, terminologiaadoptata este ın concordanta cu faptul ca actiunile Jk , care reprezinta noile impulsuri ge-neralizate, au dimensiunea de moment cinetic (se stie ca impulsul generalizat corespunzatorunei coordonate unghiulare este un moment cinetic).
O consecinta a celor prezentate o constituie reprezentatea sub forma de serie Fouriera functiilor care depind de coordonatele sistemului. Dupa cum s-a stabilit, atunci candvariabila unghi wk se modifica cu o unitate, coordonata qk realizeaza un ciclu ıntreg devariatie. In cazul miscarii periodice de tipul libratiei, aceasta ınseamna ca qk revine lavaloarea initiala si astfel coordonata qk trebuie sa fie o functie periodica de variabila wk
cu perioada ∆wk = 1 . In consecinta functia qk poate fi reprezentata sub forma unei seriiFourier :
qk =+∞∑
j=−∞aj e2πijwk =
+∞∑
j=−∞aj e2πij (νkt + βk) (16.178)
unde j este un numar ıntreg care ia toate valorile posibile ıntre −∞ si +∞ . Coeficientii aj
se determina cu formulele cunoscute :
aj =
1∫
0
qk e−2πijwk dwk (16.179)
Daca miscarea are caracter de rotatie, atunci variatiei lui wk cu o unitate ıi corespunde ocrestere a variabilei qk cu valoarea perioadei sale Qk . O astfel de coordonata nu va mai fi ofunctie periodica de wk , ınsa diferenta qk −wkQk va fi din nou o functie periodica de wk cuperioada unitate si de asemenea poate fi dezvoltata ın serie Fourier :
qk − wkQk =+∞∑
j=−∞aj e2πijwk =
+∞∑
j=−∞aj e2πij (νkt + βk) (16.180)
Se observa astfel ca atat ın cazul libratiei, cat si ın cel al rotatiei, dependenta lui qk de t poatefi reprezentata cu ajutorul unei sume de armonice a caror frecvente sunt un multiplu de νk . Incazul unei functii uniforme F de variabilele qk ; k = 1, . . . , n , seria Fourier corespunzatoareva contine toate combinatiile liniare posibile de frecvente fundamentale νk ; k = 1, . . . , najungandu-se la o dezvoltare de forma :
F (q1, . . . , qn) =+∞∑
j1=−∞· · ·
+∞∑
jn=−∞Aj1,...,jn e2πi (j1w1 + · · ·+ jnwn) (16.181)
unde j1, . . . , jn sunt numere ıntregi. Evident, o astfel de functie va fi pur periodica dacatoate frecventele sunt comensurabile, adica daca exista un numar de (n−1) relatii de forma :
n∑
k=1
jk νk = 0 (16.182)

460 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
O proprietate foarte importanta a variabilelor actiuni o reprezinta invarianta adiaba-tica . Aceasta proprietate consta ın aceea ca variabilele actiuni pastreaza o valoare constantapentru o variatie suficient de lenta a parametrilor sistemului. Variatiile parametrilor sistemu-lui sunt considerate suficient de lente, daca pe un interval de timp comparabil cu perioadele
Tk =1
νk
; k = 1, . . . , n aceste variatii au valori foarte mici.
Pentru a demonstra aceasta proprietate se considera un sistem mecanic al carui hamil-tonian depinde explicit de un numar de n parametri λk , deci H = H(q, p, λ) . presupunemca parametrii λk sunt niste functii cunoscute de timp si ca variaza lent ın intervalele dateTk ; k = . . . , n . Desi acum sistemul nu mai este conservativ, se presupune ca pentru oricevaloare constanta a parametrilor λk ; k = 1, . . . , n , functia H poate fi tratata folosind forma-lismul variabilelor actiuni-unghiuri. Se introduc variabilele actiuni pentru valori constanteale parametrilor λk ; k = 1, . . . , n :
Jk =∮
pk dqk ; k = 1, . . . , n (16.183)
si se determina de aici constantele ak(J, λ) ; k = 1, . . . , n si apoi functia W (q, J, λ) . Aceastafunctie va genera transformarea canonica univalenta (q, p) → (w, J) definita de ecuatiile :
pk =∂W (q, J, λ)
∂qk
, wk =∂W (q, J, λ)
∂Jk
; k = 1, . . . , n (16.184)
Transformarea fiind canonica si cand parametrii λk ; k = 1, . . . , n variaza ın timp, noulhamiltonian K va fi obtinut din vechiul hamiltonian cu ajutorul formulei :
K = H +∂W
∂t= H(J, λ) +
n∑
k=1
∂W [ q(w, J, λ), J, λ ]
∂λk
λk (16.185)
In noile variabile, ecuatiile de miscare ale sistemului vor avea forma :
wk =∂K
∂Jk
=∂H(J, λ)
∂Jk
+n∑
j=1
∂2W
∂Jk∂λj
λj = νk(J, λ) +n∑
j=1
∂2W
∂wk∂λj
λj
Jk = − ∂K
∂Jk
= −n∑
j=1
∂2W [ q(w, J, λ), J, λ ]
∂wk ∂λj
λj 6= 0
(16.186)
unde νk ; k = 1, . . . , n reprezinta frecventele sistemului daca parametrii λk ; k = 1, . . . , n ar ficonstanti. Din al doilea grup de ecuatii rezulta ca, spre deosebire de cazul discutat anterior,variabilele Jk ; k = 1, . . . , n nu mai sunt niste constante. Se mediaza acest grup de ecuatii peun interval de timp suficient de mic ın raport cu timpul ın care parametrii λk ; k = 1, . . . , nsufera modificari apreciabile, ınsa suficient de mare ın raport cu perioadele Tk ; k = 1, . . . , nale sistemului. In aceste ipoteze, marimile λk , λk ; k = 1, . . . , n pot fi considerate constantepe intervalul considerat si atunci :
Jk = −n∑
j=1
∂2W
∂wk∂λj
λj ; k = 1, . . . , n (16.187)

16.2. METODA HAMILTON-JACOBI 461
Pentru a evalua aceste valori medii, se observa ca derivatele∂W
∂λj
; j = 1, . . . , n sunt functii
uniforme ın raport cu coordonatele qk ; k = 1, . . . , n . Intr-adevar, pe ciclul de variatie alcoordonatei qk (celelalte coordonate fiind mentinute constante), variatiile acestor derivatevor fi :
∆k
(∂W
∂λj
)=
∮ ∂2W
∂qk∂λj
dqk =∂
∂λj
∮ ∂W
∂qk
dqk =∂Jk
∂λj
= 0 ; j = 1, . . . , n (16.188)
deoarece conform formulei (16.185) derivatele dupa λj care provin din dependenta explicitade t a functiei W , sunt calculate mentinand coordonatele si actiunile fixate. Ca orice functii
uniforme de coordonate, functiile∂W
∂λj
; j = 1, . . . , n se pot scrie sub forma unor serii Fourier
(16.181) cu coeficienti care depind de J si λ . Din acest motiv seriile Fourier pentru derivatele∂2W
∂wk∂λj
; k, j = 1, . . . , n nu vor contine termeni constanti si ın consecinta la medierea pe un
interval de timp suficient de lung, toate aceste derivate vor fi nule. In consecinta :
Jk = 0 ; k = 1, . . . , n (16.189)
ceea ce demonstraza invarianta adiabatica a variabilelor actiuni. In fine, neglijand ın(16.186a) termenii proportionali cu λj ; j = 1, . . . , n , se obtin expresiile aproximative pentrufrecventele de variatie ale coordonatelor qk ; k = 1, . . . , n :
νk(t) =∂H[J, λ(t)−]
∂Jk
; k = 1, . . . , n (16.190)
Se observa ca aceste frecvente sunt functii lent variabile de timp.
Aplicatii
1. Sa se studieze, folosind variabilele actiuni-unghiuri, miscarea oscilatorului armonic anizotroptridimensional si sa se gaseasca conditiile ın care traiectoria sa este o curba ınchisa.
Rezolvare : Cu notatiile cunoscute de la metoda separarii variabilelor, hamiltonianul siste-mului are forma :
H =3∑
i=1
(p2
i
2m+
kiq2i
2
)=
3∑
i=1
ai = h (1)
Variabilele actiuni vor fi :
Ji =∮
pi dqi =∮ √
2mai −mkiq2i dqi ; i = 1, 2, 3 (2)
Facand notatiile :
qi =
√2ai
ki
sin ϕ ; i = 1, 2, 3 (3)
si observand ca pe un ciclu complet ϕ variaza de la 0 la 2π , rezulta :
Ji = 2ai
√m
ki
2π∫
0
cos2 ϕ dϕ = 2πai
√m
ki
; i = 1, 2, 3 (4)

462 CAPITOLUL 16. INTEGRAREA SISTEMULUI CANONIC
Noul hamiltonian va fi :
h = K(J1, J2, J3) =1
2π
3∑
i=1
√ki
mJi (5)
Frecventele de variatie ale coordonatelor vor fi astfel :
νi =∂K
∂Ji
=1
2π
√ki
m=
ωi
2π; i = 1, 2, 3 (6)
Daca frecventele sunt incomensurabile, traiectoria punctului nu va fi o curba ınchisa si ınconsecinta punctul nu va trece niciodata printr-o pozitie ocupata de el anterior, desi dupa untimp suficient de lung el va trece oricat de aproape dorim de pozitia respectiva. Daca ınsafrecventele sunt comensurabile, adica satisfac la conditii de forma :
3∑
i=1
ji νi = 0 (7)
unde ji ; i = 1, 2, 3 sunt numere ıntregi, atunci miscarea este degenerata si ın cazul candfrecventele satisfac la doua conditii independente de tipul (7) miscarea este total degenerata ,traictoria fiind ınchisa si miscarea strict periodica.
2. Sa se studieze micile oscilatii ale pendulului matematic de lungime variabila, ın ipoteza caalungirea firului de suspensie este foarte lenta.
Rezolvare : In aproximatia micilor oscilatii hamiltonianul problemei este :
H =p2
θ
2ml2+ mgl
θ2
2= E (1)
unde E reprezinta energia totala a pendulului si este o functie lent variabila ın timp. In conditiileın care se mentin fixate valorile lui E si l , se poate calcula usor variabila actiune, deoarece(1) reprezinta ecuatia unei elipse ın spatiul fazelor (θ, pθ) , avand semiaxele a =
√2ml2E si
b =
√2E
mgl:
J =∮
pθ dθ = πab = E · 2π√
l
g(2)
Hamiltonianul, ca functie de J si de parametrul l va avea astfel expresia :
H = J · 1
2π
√g
l(3)
iar frecventa de variatie a coordonatei θ ın conditiile ın care l este fixat are valoarea binecunoscuta :
ν =∂H
∂J=
1
2π
√g
l(4)
Din ultimele expresii rezulta legatura evidenta E = J ν . La o variatie lenta a lungimii firuluide suspensie a pendulului, deoarece J este un invariant adiabatic, rezulta ca energia totala esteproportionala cu frecventa de oscilatie care de asemenea are o variatie lenta ın timp :
E(t) = J ν(t) (5)

16.2. METODA HAMILTON-JACOBI 463
In conformitate cu demonstratia privind invarianta adiabatica a actiunii J , energia din formula(5) reprezinta o valoare medie calculata pe un interval suficient de mare si atunci :
E =ml2
2θ2 +
mgl
2θ2 (6)
Aici s-a neglijat termenul proportional cu l2 , iar functiile l2 si l care variaza foarte lent au fostscoase de sub semnul de mediere. Tinand cont de faptul ca pendulul efectueaza oscilatii armoniceavand amplitudinea θ0(t) care variaza foarte lent si frecventa ν(t) , ca rezultat al medierii se obtineca :
θ2 =θ20
2, θ2 =
θ20
2(2πν)2 (7)
si atunci (6) devine :
E =mg
2lθ2
0 (8)
Introducand acest rezultat ın formula (5) se obtine ın final relatia :
l3/4 θ0 =
√√√√ J
πm√
g= const. (9)
In consecinta, la o alungire lenta a firului pendulului, amplitudinea sa unghiulara θ0 se micsoreaza,ın timp ce amplitudinea sa liniara lθ0 creste. In plus, din (8) rezulta ca energia sa totala semicsoreaza invers proportional cu
√l .

Bibliografie
[1] V. ARNOLD - Methodes mathematiques de la mecanique classique, EditionsMir, Moscou, 1976.
[2] N. I. BEZUHOV - Teoria elasticitatii si plasticitatii, Editura Tehnica, Bucuresti,1957.
[3] P. BRADEANU - Mecanica fluidelor, Editura Tehnica, Bucuresti, 1973.
[4] P. BRADEANU, I. POP, D. BRADEANU - Probleme si exercitii de mecanicateoretica, Editura Tehnica, Bucuresti, 1979.
[5] L. BURLACU, D. G. DAVID - Culegere de probleme de Mecanica Analitica,Tipo. Univ. Bucuresti, 1988.
[6] D. CRACIUN, B. DEMSOREANU - Elemente de mecanica teoretica, Tipo. Uni-versitatea de Vest, Timisoara, 2000.
[7] J. A. CRONIN, D. F. GREENBERG, V. L. TELEGDI - University of Chicago.Graduate Problems in Phiysics, Addison-Wesley Publ. Co., Reading, Mass. 1967
[8] B. DEMSOREANU - Mecanica analitica si a mediilor deformabile (cu aplica-tii), Tipo. Universitatea din Timisoara, 1980.
[9] B. DEMSOREANU - Mecanica teoretica, Tipo. Universitatea din Timsoara, 1991.
[10] B. DEMSOREANU - Mecanica analitica si a mediilor deformabile - ındruma-tor de seminar si laborator, Tipo. Univ. Timsoara, ed. I, 1986, ed II, 1989.
[11] L. DRAGOS - Principiile mecanicii analitice, Editura Tehnica, Bucuresti, 1976.
[12] L. DRAGOS - Principiile mecanicii mediilor continue, Editura Tehnica, Bu-curesti, 1981.
[13] M. DRAGANU - Introducere matematica ın fizica teoretica moderna. Vol. I,Editura Tehnica, Bucuresti, 1957.
[14] GH. DRECIN - Mecanica teoretica. Partea a II-a, Tipo. Universitatea dinTimisoara, 1973.
465
466 BIBLIOGRAFIE
[15] M. M. FILONENCO-BORODICI - Teoria elasticitatii, Editura Tehnica, Bucuresti,1952.
[16] J. FLOREA, V. PANAITESCU - Mecanica fluidelor, Editura Didactica si Pedago-gica, Bucuresti, 1979.
[17] Z. GABOS, D. MANGERON, I. STAN - Fundamentele mecanicii, Editura Acade-miei, Bucuresti, 1962.
[18] F. GANTMACHER - Lectures in Analytical Mechanics, Mir Publishers, Moscow,1970.
[19] H. GOLDSTEIN - Classical Mechanics, Addison-Wesley, Cambridge, Mass., 1953.
[20] O. V. GOLUBEVA - Teoreticeskaia mehanika. Izd. 2-e, Izd. Vassaia skola,Moskva, 1968.
[21] L. G. GRECHKO, V. I. SUGAKOV, O. P. TOMASEVICH, A.M. FEDORCHENKO- Problems in Theoretical Physics, Mir Publishers, Moscow, 1977.
[22] M. HAIMOVICI - Teoria elasticitatii, Editura Didactica si Pedagogica, Bucuresti,1969.
[23] C. IACOB - Mecanica teoretica, Editura Didactica si Pedagogica, Bucuresti, 1971.
[24] C. IACOB - Introducere matematica ın mecanica fluidelor, Editura Academiei,Bucuresti, 1952.
[25] A. S. KOMPANEET - Kurs teoreticeskoi fiziki. Tom I, Izd. Prosvescenie, Moskva,1972.
[26] G. KOTKINE, V. SERBO - Recueil de problemes de mecanique classique, Ed.Mir, Moscou, 1981.
[27] L. LANDAU, E. LIFCHITZ - Mecanique, Editions Mir, Moscou, 1960.
[28] L. LANDAU, E. LIFCHITZ - Theorie de l’elasticite, Editions Mir, Moscou, 1967.
[29] L. LANDAU, E. LIFCHITZ - Mecanique des fluides, Editions Mir, Moscou, 1971.
[30] M. MAYER - Ecuatiile fizicii matematice (pentru sectiile de fizica), EdituraDidactica si Pedagogica, Bucuresti, 1961.
[31] I. MERCHES, L. BURLACU - Mecanica analitica si a mediilor deformabile,Editura Didactica si Pedagogica, Bucuresti, 1983.
[32] I. MERCHES, L. BURLACU - Applied Analytical Mechanics, ”The Voice of Buco-vina” Press, Iasi, 1995.
[33] I. V. MESCERSKI - Sbornik zadaci po teoreticeskoi mehanike, Izd. 35-oe, Izd.Nauka, Moskva, 1981.
BIBLIOGRAFIE 467
[34] N. I. MUSHELISVILI - Nekotoraie osnovnaie zadaci matematiceskoi teoriiuprugosti. Izd. 5-e, Izd. Nauka, Moskva, 1966.
[35] V. NOVACU - Mecanica teoretica, Tipo. Universitatea din Bucuresti, 1969.
[36] V. NOVACU - Bazele teoretice ale fizicii. Vol. I Mecanica clasica, Ed. Tehnica,Bucuresti, 1990.
[37] W. NOWACKI - Dinamica sistemelor elastice, Editura Tehnica, Bucuresti, 1969.
[38] I. I. OLHOVSKI - Kurs teoreticeskoi mehaniki dlia fizikov, Izd. 2-e, Izd. Mosk.Univ., Moskva. 1974.
[39] I. M. POPESCU, G. F. CONE, G. A. STANCIU - Culegere de probleme de fizica,Ed. Did. Pedag., Bucuresti, 1982.
[40] I. M. POPESCU, D. IORDACHE, S. TUDORACHE, M. STAN, V. FARA - Problemerezolvate de fizica. Vol. I, Ed. Tehnica, Bucuresti, 1984.
[41] A. RADU - Probleme de mecanica, Editura Didactica si Pedagogica, Bucuresti,1978.
[42] I. N. SNEDDON, D. S. BERRY - The Classical Theory of Elasticity, Handbuchder Physik, Bd. VI, Springer-Verlag, Berlin, 1958.
[43] A. STOENESCU, GH. SILAS - Mecanica teoretica, Editura Tehnica, Bucuresti,1957.
[44] A. STOENESCU, GH. BUZDUGAN, A. RIPIANU, M. ATANASIU - Culegere deprobleme de mecanica toeretica, Editura Tehnica, Bucuresti, 1958.
[45] G. K. SUSLOV - Mecanica rationala, Editura Tehnica, Bucuresti, 1950.
[46] P. P. TEODORESCU - Dinamica corpurilor liniar elastice, Editura Academiei,Bucuresti, 1972.
[47] P. P. TEODORESCU, V. ILLE - Teoria elasticitatii si introducere ın mecanicasolidelor deformabile. Vol. I, Editura Dacia, Cluj-Napoca, 1976.
[48] P. P. TEODORESCU, N. NICOROVICI-PORUMBARU - Aplicatii ale teoriei gru-purilor ın mecanica si fizica, Ed. Tehnica, Bucuresti, 1985.
[49] P. P. TEODORESCU - Sisteme mecanice. Modele clasice. Vol. I, Ed. Tehnica,Bucuresti, 1984.
[50] M. Vasiu - Fizica teoretica. Ed. a II-a, Editura Didactica si Pedagogica, Bucuresti,1970.
[51] V. VALCOVICI - Curs de mecanica, Tipo. Universitatea din Bucuresti, 1958.
468 BIBLIOGRAFIE
[52] V. VALCOVICI, ST. BALAN, R. VOINEA - Mecanica teoretica, Editura Tehnica,Bucuresti, 1959.
[53] B. YAVORSKI, A. DETLAF - Aide-memoire de physique, Editions Mir, Moscou,1975.