Bachelor Thesis - TU Wien · Bachelor Thesis Different Strategies for the Adaptive FEM-BEM...
90
Bachelor Thesis Different Strategies for the Adaptive FEM-BEM Coupling written at the Institute for Analysis and Scientific Computing of the Vienna University of Technology supervised by Ao.Univ.Prof. Dipl.Math. Dr.techn. Dirk Praetorius by Michael Feischl Schottenfeldgasse 92 1070 Wien
Transcript of Bachelor Thesis - TU Wien · Bachelor Thesis Different Strategies for the Adaptive FEM-BEM...

Bachelor Thesis
Different Strategies for theAdaptive FEM-BEM Coupling
written at theInstitute for Analysis and Scientific Computing
of the Vienna University of Technology
supervised by
Ao.Univ.Prof. Dipl.Math. Dr.techn. Dirk Praetorius
by
Michael FeischlSchottenfeldgasse 92
1070 Wien


Contents
1 Model Problem 3
2 Sobolev Spaces 32.1 Sobolev Space H1(Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Sobolev Space H−1(Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Sobolev Spaces H1/2(Γ) and H−1/2(Γ) . . . . . . . . . . . . . . . . . . . . . 52.4 Weak Form of the Laplace Equation . . . . . . . . . . . . . . . . . . . . . . 82.5 Equivalence of Norms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Integral Operators 93.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Representation Formulas 15
5 Method 1: Simple-Layer Ansatz (Bielak-MacCamy Coupling) 175.1 Weak Form and Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . 175.2 Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6 Method 2: Direct Method (Johson-Nedelec Coupling) 226.1 Weak Form and Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . 226.2 Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246.3 Stability Estimate for the Discrete and the Continuous Case . . . . . . . . 25
7 Method 3: Symmetric Coupling 257.1 Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277.2 Stability Estimate for the Discrete and the Continuous Case . . . . . . . . 277.3 Equivalence of Stability and Cea-Lemma . . . . . . . . . . . . . . . . . . . 31
8 A Posteriori Error Estimates 348.1 Residual-Based Error Estimates . . . . . . . . . . . . . . . . . . . . . . . . 348.2 Error Estimates Based on the H −H/2 Strategy . . . . . . . . . . . . . . . 38
9 Overview on the Implementation 40
10 Preliminaries 4010.1 Triangulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4010.2 Discrete Integral Operators . . . . . . . . . . . . . . . . . . . . . . . . . . 4110.3 Discrete Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4110.4 Data Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
10.4.1 The Arrays coordinates , elements , and dirichlet . . . . . 4110.4.2 The Array x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1

11 Implementation 4211.1 Local Mesh Refinement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4211.2 Solving with Symmetric Coupling . . . . . . . . . . . . . . . . . . . . . . . 4311.3 Solving with Johnson-Nedelec Coupling . . . . . . . . . . . . . . . . . . . . 5411.4 Error Estimators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5611.5 Adaptive and Uniform Algorithm . . . . . . . . . . . . . . . . . . . . . . . 5911.6 Prolongate the Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6611.7 Auxiliary Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
11.7.1 computeRHScoarse . . . . . . . . . . . . . . . . . . . . . . . . . 7311.7.2 Compute 〈φ0 , ηi〉Γ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7511.7.3 Sorting Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
12 Numerical Experiments 7812.1 Linear Problem on L-Shaped Domain . . . . . . . . . . . . . . . . . . . . . 8012.2 Nonlinear Problem on L-Shaped Domain . . . . . . . . . . . . . . . . . . . 8112.3 Nonlinear Problem on Z-Shaped Domain . . . . . . . . . . . . . . . . . . . 82
2

1 Model Problem
This section presents the interface problem which will be treated in the following sections.Let Ωint be a bounded Lipschitz domain in R
2 with boundary Γ := ∂Ωint and an outwardpointing normal vector n. The domain Ωext is the unbounded region of the problem, i.eΩext := R
2\Ωint. A schematically view of this setting is given in Figure 1. Consider thefollowing problem
−∆ui = f in Ωint, (1a)
−∆ue = 0 in Ωext, (1b)
γui − γeue = u0 on Γ, (1c)
∂nui − ∂enue = φ0 on Γ, (1d)
ue(x) = O(|x|−1) as |x| → ∞, (1e)
where γ, γe denote the interior and exterior trace operator and ∂n, ∂en the according
normal derivatives. These operators are defined for u ∈ H1(Ωint) and u ∈ H1ℓoc(Ω
ext) inSection 2. The given data satisfy f ∈ L2(Ωint), u0 ∈ H1/2(Γ), and φ0 ∈ H−1/2(Γ). Thesought solutions (ui, ue) solve (1) in the weak sense, as explained in Section 2, and satisfyui ∈ H1(Ωint) as well as ue ∈ H1
ℓoc(Ωext). To guarantee some properties of the integral
operators in Section 3, we further assume diam(Ωint) < 1.
As usual, the weak form of the interior problem is given by
a(ui, v)− 〈∂nui , v〉Γ = 〈f , v〉Ωint, for v ∈ H1(Ωint), (2)
where a(u, v) :=∫Ωint ∇u · ∇v dx and 〈· , ·〉 is the L2-scalar product on the given space.
The coupling of the interior and the exterior problem, i.e. the weak formulation of (1), ispart of the next sections.
Ωint
Ωextn
Figure 1: R2 split into Ωint, Γ, and Ωext.
2 Sobolev Spaces
In this section, Ω is a bounded Lipschitz domain in R2 with boundary Γ = ∂Ω. Note
that these are the same assumptions as for Ωint from Section 1. By Lipschitz domain,
3

Figure 2: Non-Lipschitz domains in R2. The crucial points are marked red.
we denote a domain in euclidean space whose boundary can be locally represented by aLipschitz continuous function. Exactly, Ω is called Lipschitz, if and only if, for every pointp ∈ Γ exists r > 0 and a function hp : Br(p)→ B1(0) with
• hp is a bijection,
• both, hp and h−1p are Lipschitz continuous,
• hp(Br(p) ∩ Γ) = (x, y) ∈ B1(0) : y = 0,
• hp(Br(p) ∩ Ω) = (x, y) ∈ B1(0) : y > 0.
Here, Br(p) denotes the open ball with radius r > 0 and center p ∈ R2.
2.1 Sobolev Space H1(Ω)
We choose the classical definition of H1(Ω) as space of all weakly differentiable functionsu ∈ L2(Ω) whose gradients belongs to L2(Ω)2 as well. In more mathematically terms, wedefine
H1(Ω) := u ∈ L2(Ω) : ∇u exists in the weak sense and ∇u ∈ L2(Ω)2.
Associated with the norm
‖u‖H1(Ω) =(‖u‖2L2(Ω) + ‖∇u‖2L2(Ω)
)1/2
,
H1(Ω) is a separable Hilbert space. Due to a well-known result of Meyers-Serrin,C∞(Ω) is a dense subspace of H1(Ω).Additionally, we define
H1ℓoc(Ω) := u : Ω→ R : for any compact K ⊆ Ω holds u|K ∈ H1(K),
4

where Ω is an unbounded domain in R2. We associate H1
ℓoc(Ω) with the initial topology τinduced by all seminorms of the form
pK : H1ℓoc(Ω)→ R, u 7→ ‖ u|K ‖H1(K),
where K ⊆ Ω is compact. It can be shown that (H1ℓoc(Ω), τ) is complete.
2.2 Sobolev Space H−1(Ω)
For any f ∈ L2(Ω)v 7→ 〈f , v〉Ω
defines a functional in H1(Ω)∗. The following lemma shows that essentially all linear andcontinuous functionals on H1(Ω) are of this type.
Lemma 2.1. Let X and Y be real Hilbert spaces with continuous inclusion ι : X → Y .Then, the Riesz mapping JY : Y → Y ∗, JY y := 〈y , .〉Y is well-defined as operator JY ∈L(Y,X∗) and JY (Y ) is a dense subspace of X∗.
We apply the lemma for X = H1(Ω) and Y = L2(Ω). We then obtain that L2(Ω) is a densesubspace of H1(Ω)∗, and the duality brackets (f, v) coincide with the L2-scalar product
〈f , v〉Ω provided that f ∈ L2(Ω). We denote by H−1(Ω) the dual space of H1(Ω) withrespect to the extended L2-scalar product.
2.3 Sobolev Spaces H1/2(Γ) and H−1/2(Γ)
The Sobolev Space H1/2(Γ) is defined by
H1/2(Γ) := v ∈ L2(Γ) : ‖v‖H1/2(Γ) <∞,
and associated with the norm ‖v‖H1/2(Γ) =(‖v‖2L2(Γ) + |v|2
H1/2(Γ)
)1/2
, where
|v|2H1/2(Γ) =
∫
Γ
∫
Γ
|v(x)− v(y)|2|x− y|2 dΓ(y) dΓ(x)
denotes the Sobolev-Slobodeckij seminorm. It can be shown that H1/2(Γ) is a Hilbertspace. There holds H1/2(Γ) ⊆ L2(Γ) with continuous inclusion. Therefore, Lemma 2.1applies with X = H1/2(Γ) and Y = L2(Γ). We see that L2(Γ) is a dense subspace ofH1/2(Γ)∗. As above, we denote by H−1/2(Γ) the dual space of H1/2(Γ) with respect to theextended L2-scalar product.
The following Theorem is given without proof, compare e.g. [10, Theorem 3.37].
Theorem 2.2. There is a unique trace operator γ ∈ L(H1(Ω), H1/2(Γ)) such that γu = u|Γfor any u ∈ C∞(Ω).
5

By use of the trace operator, we are able to characterize the functions u ∈ H1(Ω) whichvanish on the boundary
H10 (Ω) := u ∈ H1(Ω) : γu ≡ 0 ∈ H1/2(Γ).
To define the trace of functions u ∈ H1ℓoc(Ω
c), we need the exterior trace operator γe.
Ω
ω
Figure 3: Schematically view of Ω and ω from Theorem 2.3
Theorem 2.3. There is a continuous trace operator γe : H1ℓoc(Ω
c) → H1/2(Γ) such that
for any bounded, open Lipschitz domain Ω ⊇ Ω with Γ ∩ ∂Ω = ∅ holds
γeu = (γ u|eΩ\Ω)
∣∣∣Γ
for all u ∈ H1ℓoc(Ω
c),
where γ is the trace operator from Theorem 2.2 with respect to Ω \ Ω.
Proof. Step 1: Let Ω ⊆ R2 be a bounded, open Lipschitz domain with Ω ⊇ Ω and
Γ ∩ ∂Ω = ∅. We define ω := Ω \ Ω. Let η ∈ C∞(R2) be a function which separates Ω and
Ωc, i.e.η(x) = 1 for x ∈ Ω,
supp(η) ⊆ Ω.
C∞(ω) is a dense subspace in H1(ω). Thus, for any u ∈ H1(ω), we find a sequence(un)n∈N ⊆ C∞(ω) with un → u in H1(ω). Note that ω is a bounded, open Lipschitzdomain and if we consider γ with respect to ω, there holds
(γu)|Γ = limn→∞
(γun)|Γ = limn→∞
un|Γ = limn→∞
(ηun)|Γ = (γ(ηu))|Γ .
We define the exterior trace operator γe as
γe : H1ℓoc(Ω
c)→ H1/2(Γ), u 7→ (γ(u|ω))|Γ ,
where γ is the trace operator with respect to ω. This operator is clearly linear. At first,we want to prove that this definition is independent from the choice of Ω. Assume thatthere are bounded, open Lipschitz domains Ω1, Ω2 with Ωi ⊇ Ω and Γ ∩ ∂Ωi = ∅ fori = 1, 2. Let ωi := Ωi \Ω, i = 1, 2 induce the interior trace operators γ1, γ2 from Theorem2.2 and the exterior trace operators γe1, γ
e2, as stated above. Analogously, we choose ηi to
6

separate Ω and (Ωi)c i = 1, 2. For any u ∈ H1
ℓoc(Ωc) and for any ε > 0, we find a function
uε ∈ C∞(ω1 ∪ ω2) with ‖u−uε‖H1(ω1∪ω2) < ε and particularly ‖u−uε‖H1(ωi) < ε, i = 1, 2.We obtain
‖γe1u− γe2u‖H1/2(Γ) ≤ ‖γe1u− uε‖H1/2(Γ) + ‖γe2u− uε‖H1/2(Γ)
≤ ‖γ1 (u− uε)|ω1‖H1/2(Γ) + ‖γ2 (u− uε)|ω2
‖H1/2(Γ)
= ‖γ1 (η1(u− uε))|ω1‖H1/2(∂ω1) + ‖γ2 (η2(u− uε)) |ω2‖H1/2(∂ω2)
≤ (C1 + C2) max(‖η1(u− uε)‖H1(ω1) , ‖η2(u− uε)‖H1(ω2)).
The constants Ci, i = 1, 2 depend on the continuity of γi. If we define Cη :=max(‖η1‖∞, ‖η2‖∞, ‖∇η1‖∞, ‖∇η2‖∞), we conclude
‖ηi(u− uε)‖2H1(ωi)≤ C2
η‖u− uε‖2L2(ωi)+
∫
ωi
(∇ηi(u− uε) + ηi∇(u− uε))2 dx
≤ C2η‖u− uε‖2L2(ωi)
+ 2
∫
ωi
(∇ηi(u− uε))2 + (ηi∇(u− uε))2 dx
≤ 3C2η‖u− uε‖2H1(ωi)
.
Finally,‖γe1u− γe2u‖H1/2(Γ) ≤ 3(C1 + C2)Cηε.
Step 2: The topology of H1ℓoc(Ω
c) is induced by the family of seminorms pK : H1
ℓoc(Ωc)→
R, u 7→ ‖ u|K ‖H1(K) for all compact K ⊆ Ωc. Choose K ⊇ Ω compact with ∂K ∩ ∂Ω = ∅and ∂K Lipschitz. Set K = K \Ω. Again, we define the function η ∈ C∞(R2) to separate
Ω and Kc, i.e.η(x) = 1 for x ∈ Ω and η(x) = 0 for x ∈ Kc.
By Γ we denote ∂K. For all u ∈ H1ℓoc(Ω
c) holds
‖γeu‖H1/2(Γ) = ‖ (γ u|K)|Γ ‖H1/2(Γ) = ‖γuη‖H1/2(eΓ) ≤ C‖uη‖H1(K).
If the constant Cη denotes max(‖η‖∞, ‖|∇η|‖∞), we get
‖γeu‖H1/2(Γ) ≤ 3C · Cη‖u‖H1(K) = CpK(u) for all u ∈ H1ℓoc(Ω
c).
Let δ > 0 and O := p−1K ([0, δ/C)) ⊆ H1
ℓoc(Ωc), then O is an open neighborhood of zero in
H1ℓoc(Ω
c) and for all u, v ∈ H1
ℓoc(Ωc) with u− v ∈ O, we have
‖γeu− γev‖H1/2(Γ) ≤ CpK(u− v) ≤ δ.
Thus, γe is continuous as a mapping from H1ℓoc(Ω
c) to H1/2(Γ).
7

2.4 Weak Form of the Laplace Equation
Assume f ∈ H−1(Ω). We say that u ∈ H1(Ω) solves the equation
−∆u = f in Ω
in the weak sense, provided there is a functional g ∈ H−1/2(Γ) such that
〈f , v〉Ω = 〈∇u ,∇v〉Ω − 〈g , γv〉Γ for all v ∈ H1(Ω). (3)
Due to the fact that for u ∈ C2(Ω) and f := −∆u holds g = ∂nu, we denote by ∂nu the
functional g from (3) for all u ∈ H1(Ω) with −∆u = f ∈ H−1(Ω).A function u ∈ H1
ℓoc(Ωc) solves the equation
−∆u = 0 in R2 \ Ω
in the weak sense, if there exists h ∈ H−1/2(Γ) such that
〈∇u ,∇v〉R2\Ω − 〈h, γev〉Γ = 0 for all v ∈ D(R2 \ Ω), (4)
where D(R2 \ Ω) denotes the space of all functions u : R2 \ Ω→ R with compact support
and u ∈ C∞(supp(u)). By ∂enu we denote the functional −h. One can think of ∂n and ∂enas
∂nu(x0) = limx∈Ω, x→x0
∇u(x) · n(x0),
and∂enu(x0) = lim
x∈R2\Ω, x→x0
∇u(x) · n(x0),
for sufficiently smooth functions u.
2.5 Equivalence of Norms
One important theorem which we will need throughout this text, is the following.
Theorem 2.4. Let r : H1(Ω)→ R be a bounded seminorm. Suppose that r(u) = 0 impliesu = 0 for any constant u ∈ H1(Ω), then
‖u‖r :=(r(u)2 + ‖∇u‖2L2(Ω)
)1/2
defines an equivalent norm on H1(Ω).
For a proof, we refer to [15, Theorem 2.2].
8

3 Integral Operators
We define the Newton kernel in two dimensions
G(z) := − 1
2πlog |z| z ∈ R
2 \ 0.
In the distributional sense, this is the fundamental solution of the Laplace equation, i.ethere holds ∫
Ω
∇G · ∇v dx = v(0) for all v ∈ D(Ω).
The Newton kernel is the kernel of the following three integral operators N , V , and K,namely
• the Newton potential of f : Ω→ R
Nf(x) :=
∫
Ω
G(x− y)f(y) dy for x ∈ Ω,
• the simple-layer potential of φ : Γ→ R
V φ(x) :=
∫
Γ
G(x− y)φ(y) dΓ(y) for x ∈ Ω,
• the double-layer potential of φ : Γ→ R
Kφ(x) :=
∫
Γ
∂n(y)G(x− y)φ(y) dΓ(y) for x ∈ Ω.
Obviously, these operators are all linear. Below, we give some crucial properties.
Theorem 3.1.(i) N allows a unique extension N ∈ L(H−1(Ω), H1(Ω)) from D(Ω) to H−1(Ω).
(ii) −∆Nf = f for all f ∈ H−1(Ω).
(iii) γN ∈ L(H−1(Ω), H1/2(Γ)).
(iv) ∂nN ∈ L(H−1(Ω), H−1/2(Γ)).
Theorem 3.2.(i) V allows a unique extension V ∈ L(H−1/2(Γ), H1(Ω)) from L2(Γ) to H−1/2(Γ).
(ii) −∆V φ = 0 ∈ H−1(Ω) for all φ ∈ H−1/2(Γ).
(iii) γV ∈ L(H−1/2(Γ), H1/2(Γ)).
(iv) ∂nV ∈ L(H−1/2(Γ), H−1/2(Γ)).
Theorem 3.3.(i) There holds K ∈ L(H1/2(Γ), H1(Ω)).
(ii) −∆Kφ = 0 ∈ H−1(Ω) for all φ ∈ H−1/2(Γ).
(iii) γK ∈ L(H1/2(Γ), H1/2(Γ)).
(iv) ∂nK ∈ L(H1/2(Γ), H−1/2(Γ)).
9

We can analogously define V and K on R2 \ Ω
V eφ(x) :=
∫
Γ
G(x− y)φ(y) dΓ(y) for x ∈ R2 \ Ω,
Keφ(x) :=
∫
Γ
∂n(y)G(x− y)φ(y) dΓ(y) for x ∈ R2 \ Ω.
According to elementary calculus, there holds V eφ, Keφ ∈ C∞(R2 \ Ω) and −∆V φ =
−∆Kφ = 0 in R2 \ Γ for all φ ∈ L1(Γ) ⊇ L2(Γ). Obviously, there holds H1/2(Γ) ⊆ L2(Γ).
Thus, we obtain −∆Kψ = 0 in R2 \ Γ for all ψ ∈ H1/2(Γ).
Lemma 3.4. V e allows an unique extension to V e : H−1/2(Γ)→ H1ℓoc(Ω
c) which satisfies
‖V eφ‖H1(K) ≤ CK‖φ‖H−1/2(Γ) for all φ ∈ H−1/2(Γ), K ⊆ Ωc compact.
Proof. Assume K ⊆ Ωc compact and φ ∈ H−1/2(Γ). Choose r > 0, such that K ⊆ Br(0)
and define Ω := Br(0) \ Ω. The domain Ω is Lipschitz, and therefore we can define
VeΩ : H−1/2(∂Ω)→ H1(Ω). For any ψ ∈ H1/2(∂Ω) holds
‖ψ‖H1/2(Γ) ≤ ‖ψ‖H1/2(∂eΩ).
Thus, we can extend φ ∈ H−1/2(Γ) to a functional φ on H1/2(∂Ω), by
φ(ψ) := 〈φ, ψ|Γ〉Γ for all ψ ∈ H1/2(∂Ω).
Note that ‖φ‖H−1/2(∂eΩ) ≤ ‖φ‖H−1/2(Γ). For any φ ∈ L2(Γ), the extension φ reads
φ ∈ L2(∂Ω), φ(x) = φ(x) for x ∈ Γ, φ(x) = 0 for x ∈ ∂Ω \ Γ.
We define(V eφ)
∣∣∣K
= (VeΩ(φ))
∣∣∣K.
Let (φℓ)ℓ∈N ⊆ L2(Γ) be a sequence with φℓ → φ in H−1/2(Γ). Then, ‖φ − φℓ‖H−1/2(∂eΩ) ≤‖φ− φℓ‖H−1/2(Γ) → 0 by definition, i.e φℓ → φ in H−1/2(∂Ω). It follows
(VeΩ(φ))
∣∣∣K
= limℓ→∞
(VeΩ(φℓ))
∣∣∣K
= limℓ→∞
(V (φℓ))∣∣∣K.
This shows, that the definition of V e is independent of the choice of Ω. Now, we conclude
‖V eφ‖H1(K) ≤ ‖V eφ‖H1(eΩ) = ‖VeΩφ‖H1(eΩ) ≤ C‖φ‖H−1/2(∂eΩ) ≤ C‖φ‖H−1/2(Γ).
Let V denote another extension of V e. Then, the last estimate provides
‖V eφ− V φ‖H1(K) ≤ ‖V eφ− V eφℓ‖H1(K) + ‖V eφℓ − V φℓ‖H1(K) + ‖V φℓ − V φ‖H1(K)
≤ C‖φ− φℓ‖H−1/2(Γ),
for any φℓ ∈ L2(Γ), φ ∈ H−1/2(Γ). This, and the fact that L2(Γ) is dense in H−1/2(Γ),yield the uniqueness.
10

By definition of V e, we see
(−∆V eφ)∣∣∣K
= −∆(V eφ)∣∣∣K
= −∆VeΩφ = 0 ∈ H−1(K),
for any compact K ⊆ Ωc and φ ∈ H−1/2(Γ).
Lemma 3.5. There holds Keψ ∈ H1ℓoc(Ω
c) with ‖Keψ‖H1(K) ≤ CK‖ψ‖H1/2(Γ) for any
ψ ∈ H1/2(Γ) and for any compact K ⊆ Ωc.
Proof. Assume K ⊆ Ωc compact and ψ ∈ H1/2(Γ). Choose r > 0, such that K ⊆ Br(0)
and define Ω := Br(0) \ Ω. The domain Ω is Lipschitz, and therefore we can define
KeΩ : H1/2(∂Ω) → H1(Ω). The distance δ between Γ and ∂Br(0) is positive, therefore|x− y| > δ > 0 for all (x, y) ∈ (Γ× ∂Br(0)) ∪ (∂Br(0)× Γ). Extend any ψ ∈ H1/2(Γ) by
zero to ψ : ∂Ω→ R. There holds
|ψ|2H1/2(∂eΩ)
=
∫
Γ
∫
Γ
|ψ(x)− ψ(y)|2|x− y|2 dΓ(y) dΓ(x) +
∫
Γ
∫
∂eΩ\Γ
|ψ(x)|2|x− y|2 dΓ(y) dΓ(x)
+
∫
∂eΩ\Γ
∫
Γ
|ψ(y)|2|x− y|2 dΓ(y) dΓ(x)
≤ |ψ|2H1/2(Γ) + C‖ψ‖2L2(Γ) ≤ C‖ψ‖2H1/2(Γ),
where C > 0 depends on Ω and δ. It follows ψ ∈ H1/2(∂Ω). Thus, we get
‖Keψ‖H1(K) ≤ ‖Keψ‖H1(eΩ) ≤ ‖KeΩψ‖H1(eΩ) ≤ C‖ψ‖H1/2(∂eΩ) ≤ C‖ψ‖H1/2(Γ),
which proves the statement.
From now on, we do not make any notational difference between V and V e as well asK and Ke. The usual notation for the three integral operators, their traces, and normalderivatives is the following:
• N0 := γN ∈ L(H−1(Ω), H1/2(Γ))
• N1 := ∂nN ∈ L(H−1(Ω), H−1/2(Γ))
• V := γV ∈ L(H−1/2(Γ), H1/2(Γ)), simple-layer potential
• K ′ := ∂nV − 12∈ L(H−1/2(Γ), H−1/2(Γ)), adjoint double-layer potential
• K := γK + 12∈ L(H1/2(Γ), H1/2(Γ)), double-layer potential
• W := −∂nK ∈ L(H1/2(Γ), H−1/2(Γ)), hypersingular integral operator
There are some fundamental relations between the operators.
11

Theorem 3.6 (jump conditions). There holds
• γV = γeV
• ∂nV = 12
+K ′
• ∂enV = −12
+K ′
• γK = −12
+K,
• γeK = 12
+K,
• ∂nK = ∂enK = −W .
The proof of these statements can be found in [15, Lemma 6.4 - 6.9]. There are somefurther nontrivial properties about V , K, and W , which are now stated (cf. [12]).
Theorem 3.7. (i). The operator V is symmetric, i.e.
〈V φ, ψ〉Γ = 〈φ, V ψ〉Γ for all φ, ψ ∈ H−1/2(Γ).
(ii). Provided that diam(Ω) < 1, the operator V is elliptic, i.e.
〈V φ, φ〉Γ ≥ CV ‖φ‖2H−1/2(Γ) for all φ ∈ H−1/2(Γ),
for some CV > 0 depending only on Γ.
(iii). The operator W is symmetric, i.e.
〈Wφ,ψ〉Γ = 〈φ,Wψ〉Γ for all φ, ψ ∈ H1/2(Γ).
(iv). The operator W is positive semidefinite, i.e.
〈Wφ, φ〉Γ ≥ 0 for all φ ∈ H1/2(Γ).
(v). The operator W is H1/2∗ (Γ)-elliptic, i.e
〈Wφ, φ〉Γ ≥ CW‖φ‖2H1/2(Γ) for all φ ∈ H1/2∗ (Γ) := w ∈ H1/2(Γ) :
∫
Γ
w dΓ = 0,
where CW > 0 depends on Γ. One can show that kerW = R, i.e. the kernel of Ware the constant functions.
(vi). The operator K ′ is the adjoint of K in the functional analytic sense, i.e.
〈K ′φ, ψ〉Γ = 〈φ,Kψ〉Γ for all φ ∈ H−1/2(Γ), ψ ∈ H1/2(Γ).
Additionally, there holds Kc = −12c for any constant function c.
12

Lemma 3.8. For u ∈ H1/2(Γ) with 〈Wu, u〉Γ = 0 follows u = c ∈ R.
Proof. Let u = u0 + c be a decomposition of u with u0 ∈ H1/2∗ (Γ) and c ∈ R. By use of
(iii) and (v) from Theorem 3.7, we conclude
0 = 〈Wu, u〉Γ = 〈Wu0 , u0〉Γ + 〈Wu0 , c〉Γ + 〈Wc, u0 + c〉Γ= 〈Wu0 , u0〉Γ + 〈u0 ,Wc〉Γ = 〈Wu0 , u0〉 ≥ CW‖u0‖2H1/2(Γ) ≥ 0.
Thus, u0 = 0 and u = c.
We want to study the behavior of Kφ at infinity.
Theorem 3.9. For any φ ∈ H1/2(Γ), the function Kφ fulfills the condition
Kφ(x) = O(1/|x|) as |x| → ∞.
Proof. There holds ∇y log |x− y| = −|x− y|−2(x1 − y1, x2 − y2). Hence, we get
|∇y log |x− y|| = 1
|x− y| .
Because of the boundedness of Γ, there exists a constant C > 0 with |y| ≤ C for all y ∈ Γ.Consequently, we obtain for |x| > 2C.
1
|x− y| ≤1
|x−y||x|
1
|x| ≤1
1− C|x|
1
|x| ≤ 21
|x| y ∈ Γ.
Now, we obtain
|Kφ(x)| = 1
2π
∣∣∣∣∫
Γ
∂n(y) log |x− y|φ(y) dΓ(y)
∣∣∣∣ ≤1
2π
∫
Γ
|∇y log |x− y|| |φ(y)| dΓ(y)
≤ 2
(∫
Γ
1 dΓ(y)
)1/2
‖φ‖L2(Γ)
1
|x| for all |x| > 2C,
which is the stated condition.
There holds a similar result for V φ.
Theorem 3.10. For any φ ∈ H−1/2(Γ), the function V φ fulfills the condition
V φ(x) =−1
2π〈φ, 1〉Γ log |x|+O(1/|x|) as x→∞,
almost everywhere in Ωext.
13

Proof. The space L2(Γ) is dense in H−1/2(Γ). Thus, for any ε > 0, we find a function φεwith ‖φ− φε‖H−1/2(Γ) < ε. Consider |x| > 2C, with |y| < C for all y ∈ Γ.
V φε(x) =−1
2π
(log |x|
∫
Γ
φε(y) dΓ(y) +
∫
Γ
log|x− y||x| φε(y) dΓ(y)
). (5)
It is easy to see that
log|x− y||x| ≤ |x− y||x| − 1 ≤ |y||x| , (6)
and analogously to the proof of Theorem 3.9 we conclude
|∇y log |x−y||x|| = |∇y log |x− y|| = 1
|x− y| ≤ 21
|x| |x| > 2C, y ∈ Γ. (7)
We use the continuity of the interior trace operator γ to derive an upper bound for‖ log |x−·|
|x|‖H1/2(Γ). There holds
‖γ(log |x−·||x|
)‖H1/2(Γ) ≤ C‖ log |x−·||x|‖H1(Ωint) = C
(‖ log |x−·|
|x|‖L2(Ωint) + ‖∇y(log |x−·|
|x|)‖L2(Ωint)
).
With the estimates (6) and (7), we obtain
‖ log |x−·||x|‖H1/2(Γ) ≤ C
1
|x|
((∫
Ωint
|y|2)1/2
+ 2
(∫
Ωint
dx
)1/2).
Note that because of the boundedness of Γ, there holds 1 ∈ H1/2(Γ). Thus, we may treatthe integrals in (5) as duality brackets as stated in Lemma 2.1 and write
V φε(x) =−1
2πlog |x|〈φε , 1〉Γ + 〈φε , log |x−·|
|x|〉G,
where due to the definition of duality holds
|〈φε , log |x−·||x|〉G| ≤ ‖φε‖H−1/2(Γ)‖ log |x−·|
|x|‖H1/2(Γ) ≤ C
1
|x|‖φε‖H−1/2(Γ) |x| > 2C.
Assume, there exists a set M with positive Lebesgue measure such that
|V φ(x)| > −1
2π〈φ, 1〉Γ log |x|+ C
1
|x|‖φ‖H−1/2(Γ) a. e. in M. (8)
Measure theory states the existence of a compact set K with positive measure and K ⊆M .By computing the L2-norm of (8) over K, we obtain
‖V φ‖L2(K) >1
2π〈φ, 1〉Γ‖ log | · |‖L2(K) + C‖φ‖H−1/2(Γ)‖ 1
|·|‖L2(K),
14

whence we find a constant δ > 0 with
‖V φ‖L2(K) > δ +1
2π〈φ, 1〉Γ‖ log | · |‖L2(K) + C‖φ‖H−1/2(Γ)‖ 1
|·|‖L2(K).
Lemma 3.4 states the existence of φε with ‖V φ − V φε‖L2(K) ≤ ‖V φ − V φε‖H1(K) ≤ δ/2.Thus, we conclude
‖V φ− V φε‖L2(K) ≥ ‖V φ‖L2(K) − ‖V φε‖L2(K)
≥ δ +1
2π〈φ− φε , 1〉Γ‖ log | · |‖L2(K)
+ C(‖φ‖H−1/2(Γ) − ‖φε‖H−1/2(Γ)
)‖ 1|·|‖L2(K)
≥ δ − 1
2π‖ log | · |‖L2(K)ε+ C‖ 1
|·|‖L2(K)ε.
With ε sufficiently small, we derive a contradiction.
3.1 Notation
To avoid unhandy notation, we wont always distinguish between a function u ∈ H1(Ω) andits trace γu or γeu.
• Use in the scalar product, e.g.
〈u , v〉Γ instead of 〈γu , γev〉Γ u ∈ H1(Ω), v ∈ H1ℓoc(R
2 \ Ω).
• Use in combination with an operator, e.g.
(12−K
)u instead of
(12−K
)γu u ∈ H1(Ω).
4 Representation Formulas
It is a well-known result of the theory of boundary integral equations (e.g [12, Theorem 15])that for a solution u ∈ H1(Ωint) of−∆u = f ∈ H−1(Ωint) holds the following representationformula
u = Nf + V ∂nu− Kγu a. e. in Ωint. (9)
Additionally, the Cauchy data (γu, ∂nu) ∈ H1/2(Γ)×H−1/2(Γ) satisfy the Calderon System
(γu∂nu
)=
(12−K VW 1
2+K ′
)(γu∂nu
)+
(N0fN1f
). (10)
If we want to write the exterior part of (1) as an integral equation on the boundary Γ, weneed a representation formula which is valid on Ωext, and therefore the radiation condition
15

u(x) = O(|x|−1) as |x| → ∞ in (1e) plays an important role. Compare [10, Lemma 7.11]and [10, Theorem 7.12] to see that the solution u ∈ H1
ℓoc(Ωext) of
−∆u = 0 in Ωext (11)
satisfies the exterior representation formula
u =Mu− V ∂enu+ Ku in Ωext,
with a certain functionMu ∈ C∞(R2). In some special cases, the functionMu is easy todetermine. The following theorem is taken from [10, Theorem 8.9].
Theorem 4.1. Let u ∈ H1ℓoc(Ω
ext) be the solution of (11).
(i) The function u satisfies Mu ≡ 0 on R2 if and only if there is a
constant a ∈ R such that
u(x) = a log |x|+O(|x|−1) as |x| → ∞. (12)
(ii) The function u satisfies Mu ≡ b on R2 if and only if there is a
constant b ∈ R such that
u(x) = b+O(|x|−1) as |x| → ∞. (13)
Thus, we can choose between two different radiation conditions and still get a simplerepresentation ofMu. We prefer the condition (13), because it is closer to the behavior ofue in three dimensions. Note that for any solution (ui, ue) of the model problem (1) andany c ∈ R, the pair (ui + c, ue + c) is a solution of the model problem, too. Consequently,we are free to choose the constant b = 0 and get the radiation condition stated in (1).
Theorem 4.2 (exterior Representation formula). A solution u ∈ H1ℓoc(Ω
ext) of
−∆u = 0 in Ωext,u(x) = O(1/|x|) as |x| → ∞,
satisfies the exterior representation formula
u = −V ∂enu+ Ku, in Ωext. (14)
With this result, we can give some crucial conditions for the data f and φ0 from (1).
Theorem 4.3 (solvability of the model problem). A necessary condition for the solvabilityof the model problem (1) is
〈φ0 , 1〉Γ + 〈f , 1〉Ωint = 0. (15)
16

Proof. The function ue in (1) satisfies the conditions of Theorem 4.2 and therefore, weknow
ue = −V ∂enue + Kγeue, in Ωext.
With Theorem 3.10 and Theorem 3.9, we see that ue necessarily has to fulfill 〈∂enue , 1〉Γ = 0to satisfy the radiation condition (1e). With the jump condition (1d), we can rewrite theweak formulation (2) of the interior problem as follows
a(ui, v)− 〈∂enue , v〉Γ = 〈φ0 , v〉Γ + 〈f , v〉Ωint for v ∈ H1(Ωint).
Testing with v = 1 yields
0 = −〈∂enue , 1〉Γ = 〈φ0 , 1〉Γ + 〈f , 1〉Ωint.
Note that with the solvability results in Theorem 5.5, Theorem 6.3 and Theorem 7.6, wesee that the conditions from Theorem 4.3 are also sufficient.
5 Method 1: Simple-Layer Ansatz (Bielak-MacCamy
Coupling)
5.1 Weak Form and Stability Analysis
This method first appeared in [3] and is also known as Bielak-MacCamy-Coupling. Wechoose a representation for the exterior solution ue only using the simple-layer potentialand an unknown density φ ∈ H−1/2(Γ)
ue(x) =(V φ)
(x) in Ωext. (16)
Theorem 3.10 states that there has to hold 〈φ, 1〉Γ = 0 if we want ue to satisfy theradiation condition (1e). Note that the representation in (16) can easily be found by
defining φ = V −1γeue. Section 3 states −∆V φ = 0 in Ωext and by definition, we haveγeV φ = γeV V −1γeue = ue. Thus, V φ and ue are solutions of
−∆u = 0 in Ωext,γeu = γeue on Γ.
Therefore, we obtain ue = V φ, cf. [10, Theorem 8.10]. Now, we can reformulate the modelproblem.
Definition 5.1. Find (u, φ) ∈ H1(Ωint)×H−1/2(Γ) such that
a(u, v) + 〈(
12−K ′
)φ, v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ for all v ∈ H1(Ωint)
〈u , ψ〉Γ − 〈V φ, ψ〉Γ = 〈u0 , ψ〉Γ for all ψ ∈ H−1/2(Γ)(17)
17

Theorem 5.2. Assume that 〈φ0 , 1〉Γ+〈f , 1〉Ωint = 0. Then, the formulations (1) and (17)are equivalent in the following sense:
(i) If (ui, ue) ∈ H1(Ωint)×H1ℓoc(Ω
ext) solves (1), the pair (u, φ) ∈ H1(Ωint)×H−1/2(Γ)with u := ui and φ := V −1γeue solves (17).
(ii) If (u, φ) ∈ H1(Ωint)×H−1/2(Γ) solves (17), the definition ui := u and ue := V φprovides a solution of (1).
Proof. Step 1: Suppose that (ui, ue) solves the model problem (1), then for u = ui holdsthe first Green’s formula
a(u, v)− 〈∂nu , v〉Γ = 〈f , v〉Ωint for all v ∈ H1(Ωint).
By use of the jump condition ∂nu− ∂enue = φ0 of (1d), this equation reads
a(u, v)− 〈∂enue , v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ. (18)
Finally, we replace ∂enue = ∂enV φ = (K ′ − 1/2)φ as stated in Theorem 3.6 and obtain
a(u, v) + 〈(12−K ′)φ, v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ for all v ∈ H1(Ωint), (19)
which is the first equation of (17). There holds 〈ue , ψ〉Γ − 〈V φ, ψ〉Γ = 0 for all ψ ∈H−1/2(Γ). This follows from the representation of ue and the fact that γV = V . If weapply the jump condition γu− γeue = u0, we receive the second equation of (17)
〈u , ψ〉Γ − 〈V φ, ψ〉Γ = 〈u0 , ψ〉Γ for all ψ ∈ H−1/2(Γ).
Step 2: Suppose that (u, φ) solves (17). We start with the first equation of (17). As shownin Step 1 , it is equivalent to
a(ui, v)− 〈∂enV φ , v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ for all v ∈ H1(Ωint). (20)
This is the weak formulation of
−∆ui = f in Ωint,
∂nui − ∂enV φ = φ0.
which are the equations (1a) and (1d). Replace V φ by ue in the second equation of (17)to obtain 〈u , ψ〉Γ − 〈ue , ψ〉Γ = 〈u0 , ψ〉Γ for all ψ ∈ H−1/2(Γ). This is the trace jump in
(1c). Theorem 3.2 shows that for all φ ∈ H−1/2(Γ) holds ∆V φ = 0 in R2\Γ. It remains to
prove the radiation condition. At the beginning of this section, we saw that 〈φ, 1〉Γ = 0 is
sufficient for ue := V φ to satisfy ue(x) = O(1/|x|) as |x| → ∞. Testing the first equationof (17) with v = 1, we see
〈(
12−K ′
)φ, 1〉Γ = 〈f , 1〉Ωint + 〈φ0 , 1〉Γ.
With K1 = −1/2, this is equivalent to
〈φ, 1〉 = 〈φ,(
12−K
)1〉Γ = 〈f , 1〉Ωint + 〈φ0 , 1〉Γ = 0.
The last equation holds due to the properties of f and φ0 stated in Theorem 4.3.
18

Now, we want to prove the solvability of (17). For (d1, d2) ∈ H−1(Ωint) × H1/2(Γ), weconsider the problem:Find (u, φ) ∈ H1(Ωint)×H−1/2(Γ) such that
a(u, v) + 〈(
12−K ′
)φ, v〉Γ = d1(v) for all v ∈ H1(Ωint),
〈u , ψ〉Γ − 〈V φ, ψ〉Γ = d2(ψ) for all ψ ∈ H−1/2(Γ).(21)
For the special choices
d1 = 〈f , ·〉Ωint + 〈φ0 , ·〉Γ and d2 = 〈u0 , ·〉Γ, (22)
this is an equivalent formulation of (17). Note that the second equation of (21) is equivalentto V φ = γu−d2. Since V is elliptic, we may eliminate φ in the first equation of (21). Thisleads to
a(u, v) + 〈(12−K ′)V −1 (u− d2) , v〉Γ = d1(v) for all v ∈ H1(Ωint),
and finally to
a(u, v) + 〈12V −1u , v〉Γ − 〈K ′V −1u , v〉Γ = 〈d1 , v〉Ωint + 〈(1
2−K ′)V −1d2 , v〉Γ =: L(v), (23)
for all v ∈ H1(Ωint). If we choose d1, d2 as in (22), we see that there holds L(v) =〈f , v〉Ωint + 〈φ0 , v〉Γ + 〈
(12−K ′
)V −1u0 , v〉Γ. We define the bilinear forms
b1(u, v) := a(u, v) + 〈12V −1u , v〉Γ and b2(u, v) := −〈K ′V −1u , v〉Γ.
for all pairs (u, v) ∈ H1(Ωint)×H1(Ωint). Now, (23) reads as follows
b1(u, v) + b2(u, v) = L(v) ∀v ∈ H1(Ωint). (24)
Proposition 5.3. The operator B1 : H1(Ωint) → H−1(Ωint) defined by 〈B1u , v〉Ωint =b1(u, v) for all v ∈ H1(Ωint) is an isomorphism.
Proof. The operator V is elliptic and bounded. For every u ∈ H1/2(Γ), we can find aw ∈ H−1/2(Γ) with V w = u. Thus, with the continuity of V , there holds
〈V −1u , u〉Γ = 〈w, V w〉Γ ≥ CV ‖w‖2H−1/2(Γ) ≥ C‖u‖2H1/2(Γ).
In other words, V −1 is elliptic. We see
b1(u, u) = a(u, u) + 〈12V −1u , u〉Γ ≥ ‖∇u‖2L2(Ωint) + C‖u‖2H1/2(Γ).
As stated in Theorem 2.4, ‖u‖2 := ‖u‖2H1/2(Γ)
+ ‖∇u‖2L2(Ωint) defines an equivalent norm
on H1(Ωint). Thus, there exists a positive constant C1 with b1(u, u) ≥ C1‖u‖2H1(Ωint).Additionally, we can prove that b1 is bounded
b1(u, v) ≤ ‖∇u‖L2(Ωint)‖∇v‖L2(Ωint) + C‖u‖H1/2(Γ)‖v‖H1/2(Γ) ≤ C2‖u‖H1(Ωint)‖v‖H1(Ωint).
19

Where the constant C2 depends on the continuity of V −1 and the trace operator γ. Givenℓ ∈ H−1(Ωint), the Lax-Milgram lemma now states the unique solvability of
〈B1u , v〉Ωint = b1(u, v) = 〈ℓ , v〉Ωint for all v ∈ H1(Ωint).
In particular, this proves the unique solvability of B1u = ℓ for all ℓ ∈ H−1(Ωint). Hence,the operator B1 is bijective and bounded. Now, the open mapping theorem proves thestatement.
The proof of the following proposition can be found in [9, Lemma 1].
Proposition 5.4. Suppose Γ ⊂ R2 to be a C2-manifold. Then, the operator B2 :
H1(Ωint) 7→ H−1(Ωint) defined by 〈B2u , v〉1 = b2(u, v) for all v ∈ H1(Ωint) is compact.
By use of the operators B1 and B2 defined in Theorem 5.3 and 5.4, we can rewrite (24) inthe following form:Find u ∈ H1(Ωint) such that
(B1 +B2) u = L
If we apply B−11 , the equation becomes
(I +B−1
1 B2
)u = B−1
1 L.
The operator B−11 B2 is compact, and therefore we can apply Fredholm’s Alternative which
states that I + B−11 B2 being injective implies that I + B−1
1 B2 is already bijective, cf. e.g.[16, Satz VI.2.4].
Theorem 5.5. Suppose Γ ⊂ R2 to be a C2-manifold. Then, there exists a unique solution
(u, φ) ∈ H1(Ωint)×H−1/2(Γ) of (21) for any data (d1, d2) ∈ H−1(Ωint)×H1/2(Γ). Thereholds
‖u‖H1(Ωint) + ‖φ‖H−1/2(Γ) ≤ C(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
). (25)
Where C only depends on Ωint.
Proof. Step 1: Due to the considerations above, it is sufficient to prove thatker(I +B−1
1 B2
)= 0. Assume that
(I +B−1
1 B2
)u = 0 for some u ∈ H1(Ωint). There
holdsb1(u, v) + b2(u, v) = 0 for all v ∈ H1(Ωint),
which is equivalent to
a(u, v) + 〈12V −1u , v〉Γ − 〈K ′V −1u , v〉Γ = 0 for all v ∈ H1(Ωint),
which is (23) with L = 0. With φ := V −1u, we can rewrite this equation as
a(u, v) + 〈(12−K ′)φ, v〉Γ = 0 for all v ∈ H1(Ωint). (26)
20

Additionally, we get
〈u , ψ〉Γ − 〈V φ, ψ〉Γ = 0 for all ψ ∈ H−1/2(Γ). (27)
The equations (26) and (27) are equivalent to (17) with f ≡ 0, φ0 ≡ 0, and u0 ≡ 0.Theorem 5.2 shows that the pair (ui, ue) with ui = u and ue = V φ solves the modelproblem (1) with homogeneous data, i.e
−∆ui = 0 in Ωint,
−∆ue = 0 in Ωext,
γui = γeue on Γ,
∂nui = ∂enu
e on Γ,
ue(x) = O(1/|x|) as |x| → ∞.Theorem 4.2 and (9) state that we can write ui and ue as
ui = V ∂nui − Kγui in Ωint, (28)
andue = −V ∂enue + Kγeue in Ωext. (29)
If we apply the interior and exterior trace operators, we obtain
γui = V ∂nui + (1
2−K)γui and γeue = −V ∂enue + (1
2+K)γeue.
Together with γui = γeue and ∂nui = ∂enu
e, this yields
2γui = γui + γeue = 12γui + 1
2γeue = γui.
Thus, it follows γui ≡ 0. On the other hand, we conclude
0 = γui − γeue = 2(V ∂nui −Kγui) = −2V ∂nu
i,
and therefore ∂nui = 0. With the formulas (28) and (29), this yields ui ≡ ue ≡ 0.
Consequently, there is a unique solution (u, φ) of (21).Step 2: We now know that Au := (B1 +B2)u = L is uniquely solvable for any L ∈H−1(Ωint). The boundedness of b1 implies the continuity ofB1. The operator B2 is compact
and particularly continuous. Thus, A ∈ L(H1(Ωint), H−1(Ωint)
)and A is bijective. Now,
the open mapping theorem proves the continuity of A−1. The solution u thus satisfies
‖u‖H1(Ωint) = ‖A−1L‖H1(Ωint) ≤ CA‖〈d1 , ·〉Ωint + 〈(12−K ′)V −1d2 , ·〉Γ‖ eH−1(Ωint)
≤ C(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
).
The same holds for φ
‖φ‖H−1/2(Γ) = ‖V −1(u− d2)‖H−1/2(Γ) ≤ C(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
).
Adding these two estimates, we conclude (25). Note that the constants only depend onV −1, K ′, and the trace operator γ.
21

Corollary 5.6. For the special choices d1 = 〈f , ·〉Ωint + 〈φ0 , ·〉Γ and d2 = 〈u0 , ·〉Γ with(f, u0, φ0) ∈ L2(Ωint)×H1/2(Γ)×H−1/2(Γ), the solution (u, φ) of (21) provides a solutionof (17), too. There holds
‖u‖H1(Ωint) + ‖φ‖H−1/2(Γ) ≤ C(‖f‖L2(Ωint) + ‖u0‖H1/2(Γ) + ‖φ0‖H−1/2(Γ)
)(30)
Proof. Obviously, the norms of d1 and d2 are bounded by
‖d1‖ eH−1(Ωint) ≤ ‖f‖L2(Ωint) + ‖φ0‖H−1/2(Γ),
‖d2‖H1/2(Γ) ≤ ‖u0‖H1/2(Γ).
Now, the statement follows by use of (25).
5.2 Discretization
To solve the problem (17) numerically, we choose finite dimensional subspaces Xℓ ⊂H1(Ωint) and Yℓ ⊂ H−1/2(Γ). The Galerkin formulation of (17) then reads as follows:Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that
a(uℓ, vℓ) + 〈(
12−K ′
)φℓ , vℓ〉Γ = 〈f , vℓ〉Ωint + 〈φ0 , vℓ〉Γ,
〈uℓ , ψℓ〉Γ − 〈V φℓ , ψℓ〉Γ = 〈u0 , ψℓ〉Γ, (31)
for any (vℓ, ψℓ) ∈ Xℓ × Yℓ. Note that in practical applications Ωint is a polygon andtherefore Γ is no differentiable manifold (compare the conditions in Theorem 5.5). Thus,the stability and solvability results from above do not apply.
6 Method 2: Direct Method (Johson-Nedelec Cou-
pling)
6.1 Weak Form and Stability Analysis
The coupling method presented in this section first appeared in [9] and is known as Johnson-Nedelec-Coupling. In contrast to Method 1 from Section 5, now we use both, simple-layerand double-layer potential to represent u in the exterior domain as
ue = −V ∂enue + Kue in Ωext. (32)
Theorem 3.10 and Theorem 3.9 state that ∂enue has to satisfy 〈∂enue , 1〉Γ = 0 to get the
right behavior at infinity (1e).
Definition 6.1. Find (u, φ) ∈ H1(Ωint)×H−1/2(Γ) such that
a(u, v)− 〈φ, v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ for all v ∈ H1(Ωint)〈(
12−K
)u , ψ〉Γ + 〈V φ, ψ〉Γ = 〈
(12−K
)u0 , ψ〉Γ for all ψ ∈ H−1/2(Γ)
(33)
22

Theorem 6.2. Assume that 〈φ0 , 1〉Γ+〈f , 1〉Ωint = 0. Then, the formulations (1) and (33)are equivalent in the following sense:
(i) If (ui, ue) ∈ H1(Ωint)×H1ℓoc(Ω
ext) solves (1), the pair (u, φ) ∈ H1(Ωint)×H−1/2(Γ)with u := ui and φ := ∂enu
e solves (33).(ii) If (u, φ) ∈ H1(Ωint)×H−1/2(Γ) solves (33), the definition ui := u and
ue := −V φ+ K(u− u0) provides a solution of (1).
Proof. Step 1: Suppose (ui, ue) solves (1), then (u, φ) satisfies
a(u, v)− 〈φ+ φ0 , v〉Γ = 〈f , v〉Ωint for all v ∈ H1(Ωint),
as shown in Section 1. This is equivalently written as
a(u, v)− 〈φ, v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ for all v ∈ H1(Ωint).
To prove the second equation, we start with the representation formula for the exteriordomain (14)
ue = −V ∂enue + Kγeue in Ωext.
If we apply the trace operator γe to this equation, we get
(12−K
)γeue + V ∂enu
e = 0 in H1/2(Γ).
By use of the jump condition (1c), the equation becomes
(12−K
)γui + V ∂enu
e =(
12−K
)u0 in H1/2(Γ).
Replacing ui with u, ∂enue with φ, and testing the whole equation with ψ ∈ H−1/2(Γ), we
obtain the second equation of (33).Step 2: Suppose that (u, φ) solves (33), then the first equation states that u satisfies
−∆u = f in Ωint,∂nu = φ+ φ0 on Γ,
(34)
in the weak sense. The second equation of (33) is equivalent to
〈u , ψ〉Γ = 〈(12
+K)u , ψ〉Γ − 〈V φ, ψ〉Γ + 〈(12−K)u0 , ψ〉Γ.
This leads to
〈u− u0 , ψ〉Γ = 〈(12
+K)(u− u0) , ψ〉Γ − 〈V φ, ψ〉Γ= 〈γe
(K(u− u0)− V φ
), ψ〉Γ
= 〈ue , ψ〉Γ for all ψ ∈ H−1/2(Γ),
23

which is just the jump condition for the traces (1c). Now, we want to prove that ue :=
−V φ+ K(u− u0) solves
−∆ue = 0 in Ωext,γeue = u− u0 on Γ,ue(x) = O(|x|−1) as |x| → ∞.
(35)
The first equation follows from the fact that −∆(V λ+ Kw
)= 0 in R
2\Γ for arbitrary
(λ, w) ∈ H−1/2(Γ)×H1(Ωint) as stated in Theorem 3.2 and Theorem 3.3. Testing the firstequation of (33) with v = 1 yields −〈φ, 1〉Γ = 〈f , 1〉Ωint + 〈φ0 , 1〉Γ = 0, and therefore theradiation condition is satisfied. Note that we now already know, that the equations (1a),(1b), (1c), and (1e) of the model problem are satisfied. Theorem 4.2 states that for thesolution of (35) holds
ue = −V ∂enue + Kue in Ωext. (36)
If we subtract ue = −V φ+ K(u− u0) from (36), we get
0 = V (φ− ∂enue),
whence0 = V (φ− ∂enue).
Due to the ellipticity of V , this implies
φ = ∂enue.
Plugging this result into (34), we obtain the jump condition for the normal derivativesstated in (1d).
It remains to consider the stability of this method. The result also holds for the discretecase, hence we start with the Galerkin discretization.
6.2 Discretization
As usual, we choose finite-dimensional subspaces Xℓ ⊂ H1(Ωint) and Yℓ ⊂ H−1/2(Γ). TheGalerkin formulation of (33) reads as follows: Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that
a(uℓ, vℓ)− 〈φℓ , vℓ〉Γ = 〈f , vℓ〉Ωint + 〈φ0 , vℓ〉,〈(
12−K
)uℓ , ψℓ〉Γ + 〈V φℓ , ψℓ〉Γ = 〈
(12−K
)u0 , ψℓ〉Γ, (37)
24

6.3 Stability Estimate for the Discrete and the Continuous Case
The following theorem provides the solvability and stability for both, the continuous andthe discrete case. Thus, for subspaces Xℓ ⊆ H1(Ωint), Yℓ ⊆ H−1/2(Γ), and (d1, d2) ∈X∗ℓ × Y ∗
ℓ , we consider the problem:Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that
a(uℓ, vℓ)− 〈φℓ , vℓ〉Γ = d1(vℓ) for all vℓ ∈ Xℓ,〈(
12−K
)uℓ , ψℓ〉Γ + 〈V φℓ , ψℓ〉Γ = d2(ψℓ) for all ψℓ ∈ Yℓ. (38)
Theorem 6.3 (F.-J. Sayas). For any choice of closed spaces Xℓ ⊂ H1(Ωint) and Yℓ ⊂H−1/2(Γ) (finite or infinite dimensional) with 1 ∈ Yℓ, there exists a unique solution(uℓ, φℓ) ∈ Xℓ × Yℓ of (38). There holds
‖uℓ‖H1(Ωint) + ‖φℓ‖H−1/2(Γ) ≤ C(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
),
where the constant C > 0 is independent of the choice of spaces.
For a proof, consider [14]. We give a simple consequence of this result.
Corollary 6.4. For any data (f, u0, φ0) ∈ L2(Ωint)×H1/2(Γ)×H−1/2(Γ), there exist uniquesolutions (uℓ, φℓ) ∈ Xℓ×Yℓ of (37) as well as (u, φ) ∈ H1(Ωint)×H−1/2(Γ) of (33). Thereholds
‖uℓ‖H1(Ωint) + ‖φℓ‖H−1/2(Γ) ≤ C(‖f‖L2(Ωint) + ‖u0‖H1/2(Γ) + ‖φ0‖H−1/2(Γ)
),
‖u‖H1(Ωint) + ‖φ‖H−1/2(Γ) ≤ C(‖f‖L2(Ωint) + ‖u0‖H1/2(Γ) + ‖φ0‖H−1/2(Γ)
),
where the constant C > 0 doesn’t depend on the choice of spaces.
Proof. Choose d1 = 〈f , ·〉Ωint + 〈φ0 , ·〉 ∈ H−1(Ωint) and d2 = 〈(
12−K
)u0 , ·〉Γ ∈ H1/2(Γ).
With Xℓ×Yℓ = H1(Ωint)×H−1/2(Γ), the formulations (33) and (38) are equivalent. To seethe equivalence of (38) and (37), consider Xℓ and Yℓ being finite-dimensional and restrictd1 and d2 to Xℓ resp. Yℓ. In both cases, the norms of d1 and d2 are bounded by
‖d1‖ eH−1(Ωint) ≤ ‖f‖L2(Ωint) + ‖φ0‖ eH−1(Γ),
‖d2‖H1/2(Γ) ≤ C‖u0‖H1/2(Γ),
where C > 0 only depends on Γ and the continuity of K. The statement follows by use ofTheorem 6.3.
7 Method 3: Symmetric Coupling
This section presents the best known coupling method. Proposed by Costabel, it firstappeared in [8]. The representation of the solution in the exterior domain is the same asin Section 6, namely
ue = −V ∂enue + Kue in Ωext. (39)
This two methods only differ in how the interior and the exterior solutions are linked atthe boundary.
25

Definition 7.1. Find (u, φ) ∈ H1(Ωint)×H−1/2(Γ) such that for all (v, ψ) ∈ H1(Ωint) ×H−1/2(Γ)
a(u, v) + 〈(K ′ − 1
2
)φ, v〉Γ + 〈Wu, v〉Γ = 〈f , v〉Ωint + 〈φ0 +Wu0 , v〉Γ,
〈(
12−K
)u , ψ〉Γ + 〈V φ, ψ〉Γ = 〈
(12−K
)u0 , ψ〉Γ. (40)
Note that if we multiply the second equation of (40) by −1, the bilinear form inducedby (40) becomes symmetric, which explains the name of the method.
Theorem 7.2. Assume that 〈φ0 , 1〉Γ+〈f , 1〉Ωint = 0. Then, the formulations (1) and (40)are equivalent in the following sense:
(i) If (ui, ue) ∈ H1(Ωint)×H1ℓoc(Ω
ext) solves (1), the pair (u, φ) ∈ H1(Ωint)×H−1/2(Γ)with u := ui and φ := ∂enu
e solves (40).(ii) If (u, φ) ∈ H1(Ωint)×H−1/2(Γ) solves (40), the definition ui := u and
ue := −V φ+ K(u− u0) provides a solution of (1).
Proof. Step 1: As always, we start with the solution (ui, ue) of the model problem (1).Then, (u, φ) satisfies
a(u, v)− 〈φ+ φ0 , v〉Γ = 〈f , v〉Ωint for all v ∈ H1(Ωint) (41)
Applying the exterior normal derivative to the representation of ue, we obtain
φ = ∂enue = −
(−1
2+K ′
)∂enu
e −Wue in H−1/2(Γ).
Plugging this result into (41), we get
a(u, v) + 〈(−12
+K ′)∂enue , v〉Γ + 〈Wue , v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ v ∈ H1(Ωint).
Now, we use the jump conditions for the trace (1c) and replace ∂enue by φ. This yields the
first equation of (40). The second equation of (40) is the same as used in Method 2, cf.(33). Hence, we omit the proof.Step 2: Suppose the pair (u, φ) solves (40). The first equation of (40) is equivalentlywritten
a(u, v) + 〈(K ′ − 12)φ+W (u− u0) , v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ. (42)
Similar to Step 1, we see that ∂enue = ∂en
(−V φ+ K(u− u0)
)= −
(−1
2+K ′
)φ−W (u−u0).
Thus, (42) reads
a(u, v)− 〈∂enue , v〉Γ = 〈f , v〉Ωint + 〈φ0 , v〉Γ for all v ∈ H1(Ωint),
which is just the weak formulation of
−∆u = f in Ωint,
∂nu = ∂enue + φ0 on Γ.
26

The second equation of (40) is equivalent to
〈u , ψ〉Γ = 〈(12
+K)u , ψ〉Γ − 〈V φ, ψ〉Γ + 〈(12−K)u0 , ψ〉Γ.
As in Step 2 from the proof of Theorem 6.2, we obtain the jump condition (1c)
〈u− u0 , ψ〉Γ = 〈(12
+K)(u− u0) , ψ〉Γ − 〈V φ, ψ〉Γ = 〈ue , ψ〉Γ for all ψ ∈ H−1/2(Γ).
With the fact that−∆(V λ+ Kω
)= 0 in R
2\Γ for arbitrary (λ, ω) ∈ H−1/2(Γ)×H1(Ωint),
we prove that ue = −V φ+ K(u− u0) solves
−∆ue = 0 in Ωext,γeue = u− u0 on Γ,∂enu
e = φ− φ0 on Γ.(43)
It remains to prove the radiation condition (1c). Choose v = 1 in the first equation of (40)to see
−〈φ, 1〉Γ = 〈φ, (K − 12)1〉Γ + 〈u ,W1〉Γ = 〈f , 1〉Ωint + 〈φ0 , 1〉Γ + 〈u0 ,W1〉Γ
= 〈f , 1〉Ωint + 〈φ0 , 1〉Γ = 0.
Theorem 3.10 and Theorem 3.9 state that ue satisfies (1e).
7.1 Discretization
As usual we choose finite-dimensional subspaces Xℓ ⊂ H1(Ωint) and Yℓ ⊂ H−1/2(Γ). TheGalerkin formulation of (33) reads as follows: Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that for all(vℓ, ψℓ) ∈ Xℓ × Yℓ
a(uℓ, vℓ) + 〈(K ′ − 1
2
)φℓ , vℓ〉Γ + 〈Wuℓ , vℓ〉Γ = 〈f , vℓ〉Ωint + 〈φ0 +Wu0 , vℓ〉Γ
〈(
12−K
)uℓ , ψℓ〉Γ + 〈V φℓ , ψℓ〉Γ = 〈
(12−K
)u0 , ψℓ〉Γ (44)
7.2 Stability Estimate for the Discrete and the Continuous Case
We choose a similar approach as in [6]. By bootstrapping the results in [6], we maysimultaneously prove the discrete and the continuous case. We assume Xℓ ⊆ H1(Ωint)and Yℓ ⊆ H−1/2(Γ) to be closed subspaces. Note that the choices Xℓ = H1(Ωint) andYℓ = H−1/2(Γ) are valid, too. Let iℓ : Xℓ → H1(Ωint) and jℓ : Yℓ → H−1/2(Γ) denote the
canonical embeddings with their duals i′ℓ : H−1(Ωint) → X∗ℓ and j′ℓ : H1/2(Γ) → Y ∗
ℓ . Wedefine the discrete integral operators
Vℓ := j′ℓV jℓ, Kℓ := j′ℓKγiℓ, Wℓ := i′ℓγ′Wγiℓ, K ′
ℓ := i′ℓγ′K ′jℓ. (45)
Obviously, the discrete operators are all linear and bounded. Note that for Xℓ = H1(Ωint)and Yℓ = H−1/2(Γ), the operators coincide with the previously defined operators V , K,K ′, and W . There holds
〈Wℓvℓ , vℓ〉Γ = 〈Wγiℓvℓ , γiℓvℓ〉Γ ≥ 0 for all vℓ ∈ Xℓ.
27

Lemma 7.3. The operators Vℓ and V −1ℓ are uniformly elliptic, i.e.
〈Vℓφℓ , φℓ〉Γ ≥ CV ‖φℓ‖2H−1/2(Γ) and 〈V −1ℓ ψℓ , ψℓ〉Γ ≥ C‖ψℓ‖2H1/2(Γ),
for all (φℓ, ψℓ) ∈ Yℓ × Y ∗ℓ , where C > 0 and CV > 0 are independent of the chosen spaces
Xℓ and Yℓ.
Proof. The ellipticity of Vℓ is a direct consequence of the ellipticity of V , i.e.
〈Vℓφℓ , φℓ〉Γ = 〈V jℓφℓ , jℓφℓ〉Γ ≥ CV ‖φℓ‖2H−1/2(Γ) for all φℓ ∈ Yℓ.
Now, the lemma of Lax-Milgram applies and we obtain that
〈Vℓφℓ , ψℓ〉Γ = ℓ(ψℓ) for all ψℓ ∈ Y ∗ℓ ,
is uniquely solvable for all ℓ ∈ Yℓ and that Vℓ is an isomorphism. Thus, for any φℓ ∈ Yℓ,one can find ψℓ ∈ Y ∗
ℓ with Vℓψℓ = φℓ. Hence, we get
〈V −1ℓ φℓ , φℓ〉Γ = 〈ψℓ , Vℓψℓ〉Γ ≥ CV ‖ψℓ‖2H−1/2(Γ).
The operator norms of jℓ and its dual j′ℓ are 1 = ‖jℓ‖ = ‖j′ℓ‖, therefore
〈V −1ℓ φℓ , φℓ〉Γ ≥ CV ‖ψℓ‖2H−1/2(Γ) ≥ ‖Vℓ‖−2CV ‖Vℓψℓ‖2H−1/2(Γ)
≥ (‖jℓ‖‖V ‖‖j′ℓ‖)−2CV ‖φℓ‖2H−1/2(Γ)
= C‖φℓ‖H−1/2(Γ).
This proves the statement.
Now, we may define the Steclow-Poincare operator.
Definition 7.4. By Sℓ : Xℓ → Xℓ, we denote
Sℓ := Wℓ + (12I ′ℓ −K ′
ℓ)V−1ℓ (1
2Iℓ −Kℓ),
where Iℓ := j′ℓγiℓ. For convenience, we also define
S = W + (12−K ′)V −1(1
2−K),
which corresponds to the definition of Sℓ with Xℓ = H1(Ωint) and Yℓ = H−1/2(Γ).
Theorem 7.5. There is a constant c0 > 0, such that for any closed subspace Xℓ × Yℓ ⊆H1(Ωint)×H−1/2(Γ) with 1 ∈ Yℓ holds
〈Sℓuℓ , uℓ〉Γ ≥ c0‖uℓ‖2H1/2(Γ) for all uℓ ∈ Xℓ.
28

Proof. We want to prove the following result
∃c0 > 0 : ∀(Xℓ, Yℓ) ⊆ H1(Ωint)×H−1/2(Γ) with 1 ∈ Yℓ : ∀uℓ ∈ Xℓ : 〈Sℓuℓ , uℓ〉Γ ≥ c0‖uℓ‖2H1/2(Γ).
Assume that the conclusion is false, i.e.
∀c > 0 : ∃(Xℓ, Yℓ) ⊆ H1(Ωint)×H−1/2(Γ) with 1 ∈ Yℓ : ∃uℓ ∈ Xℓ : 〈Sℓuℓ , uℓ〉Γ < c‖uℓ‖2H1/2(Γ).
Then, one can construct a sequence of functions (uℓn)n∈N in H1(Ωint) with
uℓn ∈ Xℓn, 〈Sℓnuℓn , uℓn〉Γ ≤ 1n‖uℓn‖2H1/2(Γ) for all n ∈ N.
Without loss of generality, we set ‖uℓn‖H1/2(Γ) = 1 and obtain
〈Sℓnuℓn , uℓn〉Γ ≤ 1n
for all n ∈ N.
With ‖γuℓn‖H1/2(Γ) ≤ 1, the Banach-Alaoglu-Theorem states the weak convergence of a
subsequence of (uℓn)n∈N towards some w ∈ H1/2(Γ). To avoid unhandy notation, weassume that we chose such a subsequence at the beginning, i.e.
〈uℓn , v〉Γ → 〈w, v〉Γ for all v ∈ H1/2(Γ).
Now, by definition of Sℓ we firstly conclude
〈Sℓnuℓn , uℓn〉Γ = 〈Wℓnuℓn , uℓn〉Γ + 〈V −1ℓn
(12Iℓn −Kℓn)uℓn , (
12Iℓn −Kℓn)uℓn〉Γ.
The ellipticity of V −1ℓ and the semidefiniteness of W yield
0← 〈Sℓnuℓn , uℓn〉Γ ≥ 〈Wℓnuℓn , uℓn〉Γ = 〈Wuℓn , uℓn〉 ≥ 0.
Note that the functional
H1/2(Γ)→ R, u 7→ 〈Wu, u〉Γ
is continuous and convex, whence weakly lower semicontinuous. This implies
0 ≤ 〈Ww,w〉 ≤ lim infn→∞
〈Wuℓn , uℓn〉 = 0.
i.e. w is constant as stated in Lemma 3.8. Let uℓn = vn + wn be a decomposition of uℓnwith vn ∈ H1
∗ (Ωint) and wn ∈ R. Due to the H1
∗ (Ωint)-ellipticity of W , we obtain
0← 〈Wuℓn , uℓn〉Γ = 〈Wvn , vn〉Γ + 〈vn ,Wwn〉Γ + 〈Wwn , vn + wn〉Γ= 〈Wvn , vn〉 ≥ CW‖vn‖2H1/2(Γ).
Thus, vn → 0 strongly in H1/2(Γ). It follows
〈vℓn , 1〉Γ + wn〈1 , 1〉Γ = 〈uℓn , 1〉Γ → w〈1 , 1〉Γ,
29

and with vn → 0 we obtain wn → w in R. Altogether, we have strong convergence of uℓntowards the constant w in H1/2(Γ). On the other hand, there holds
0← 〈Sℓnuℓn , uℓn〉Γ ≥ 〈V −1ℓn
(12Iℓn −Kℓn)uℓn , (
12Iℓn −Kℓn)uℓn〉Γ
≥ C‖(12Iℓn −Kℓn)uℓn‖H−1/2(Γ) for all n ∈ N,
due to the semidefiniteness of W and the ellipticity of V −1ℓn
. Hence,
0 = limn→∞〈1 , (1
2Iℓn −Kℓn)uℓn〉Γ = lim
n→∞〈1 , 1
2γuℓn −Kγuℓn〉Γ = 〈1 , 1
2γw −Kγw〉Γ = w〈1 , 1〉,
i.e. w = 0. This contradicts ‖w‖H1/2(Γ) = limn→∞ ‖uℓn‖H1/2(Γ) = 1.
Now, we are able to give a stability estimate for both, the discrete and the continuous case.With (d1, d2) ∈ X∗
ℓ × Y ∗ℓ , we consider the following problem:
Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that
a(uℓ, vℓ) + 〈(K ′ − 1
2
)φℓ , vℓ〉Γ + 〈Wuℓ , vℓ〉Γ = d1(vℓ),
〈(
12−K
)uℓ , ψℓ〉Γ + 〈V φℓ , ψℓ〉Γ = d2(ψℓ),
(46)
for all (vℓ, ψℓ) ∈ Xℓ × Yℓ.
Theorem 7.6. For any choice of spaces Xℓ ⊆ H1(Ωint) and Yℓ ⊆ H−1/2(Γ) (finite ofinfinite dimensional) with 1 ∈ Yℓ, there exists a solution (uℓ, φℓ) ∈ Xℓ × Yℓ of (46). Thereholds
‖uℓ‖H1(Ωint) + ‖φℓ‖H−1/2(Γ) ≤ C(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
).
Proof. The second equation of (46) can be rearranged to
φℓ = −V −1ℓ (1
2Iℓ −Kℓ)(uℓ − d2) in Yℓ. (47)
If we eliminate φℓ in the first equation of (46), the problem reads
a(uℓ, vℓ) + 〈Sℓuℓ , vℓ〉Γ = L(vℓ) for all vℓ ∈ Xℓ, (48)
where L(vℓ) := d1(vℓ) + 〈(Sℓ −Wℓ)d2 , vℓ〉Γ ∈ X∗ℓ = Xℓ. With Theorem 7.5, we have
a(uℓ, uℓ) + 〈Sℓuℓ , uℓ〉Γ ≥ ‖∇uℓ‖2L2(Ωint) + C‖uℓ‖2H1/2(Ωint) for all uℓ ∈ Xℓ,
where C doesn’t depend on the choice of (Xℓ, Yℓ). Due to Theorem 2.4, we see that the righthand side of the equation denotes an equivalent norm on H1(Ωint), and thus is boundedbelow, i.e.
a(uℓ, uℓ) + 〈Sℓuℓ , uℓ〉Γ ≥ C‖uℓ‖2H1(Ωint) for all uℓ ∈ Xℓ.
30

Now, the lemma of Lax-Milgram applies and states the unique solvability of (46). Thesolution uℓ satisfies
‖uℓ‖H1(Ωint) ≤ C‖L‖eH−1(Ωint) ≤ C
(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
),
where C > 0 doesn’t depend on the choice of (Xℓ, Yℓ). The operator norms of iℓ, jℓ are1 = ‖iℓ‖ = ‖jℓ‖, and so are their duals 1 = ‖i′ℓ‖ = ‖j′ℓ‖. Therefore, all operators in (47)are uniformly bounded. Finally, we obtain
‖φℓ‖H−1/2(Ωint) ≤ C(‖d1‖ eH−1(Ωint) + ‖d2‖H1/2(Γ)
).
The combination of both estimates concludes the prove.
Corollary 7.7. For any data (f, u0, φ0) ∈ L2(Ωint) × H1/2(Γ) × H−1/2(Γ), there existsolutions (uℓ, φℓ) ∈ Xℓ×Yℓ of (44) and (u, φ) ∈ H1(Ωint)×H−1/2(Γ) of (40). There holds
‖u‖H1(Ωint) + ‖φ‖H−1/2(Γ) ≤ C(‖f‖L2(Ωint) + ‖u0‖H1/2(Γ) + ‖φ0‖H−1/2(Γ)
),
‖uℓ‖H1(Ωint) + ‖φℓ‖H−1/2(Γ) ≤ C(‖f‖L2(Ωint) + ‖u0‖H1/2(Γ) + ‖φ0‖H−1/2(Γ)
),
where C > 0 is independent of the choice of Xℓ and Yℓ.
Proof. Choose d1 = 〈f , ·〉Ωint + 〈φ0 + Wu0 , ·〉 ∈ H−1(Ωint) and d2 = 〈(
12−K
)u0 , ·〉Γ ∈
H1/2(Γ). With Xℓ× Yℓ = H1(Ωint)×H−1/2(Γ), the formulations (40) and (46) are equiva-lent. To see the equivalence of (46) and (44), consider Xℓ and Yℓ being finite-dimensionaland restrict d1 and d2 to Xℓ resp. Yℓ. In both cases, the norms of d1 and d2 are boundedby
‖d1‖ eH−1(Ωint) ≤ ‖f‖L2(Ωint) + ‖φ0‖ eH−1(Γ) + C1‖u0‖H1/2(Γ),
‖d2‖H1/2(Γ) ≤ C2‖u0‖H1/2(Γ),
where C2 > 0 depends only on Γ and the continuity of K as well as C1 > 0 depends onlyon the continuity of W . The statement follows by use of Theorem 7.6.
7.3 Equivalence of Stability and Cea-Lemma
In view of numerical experiments, it is good to know some facts about convergence of thepresented coupling methods. As a first step, we want to prove that the methods fromSection 6 and Section 7 provide quasi best approximations of the exact solution in thesense of the Cea-Lemma.
Definition 7.8. Let Z be a Hilbert space and let a(·, ·) denote a continuous bilinear forma : Z × Z → R. For any finite-dimensional subspace Zℓ ⊂ Z, we consider the inducedbounded operators
A : Z → Z∗, 〈Ax, y〉 = a(x, y) for all x, y ∈ Z,Aℓ : Zℓ → Z∗
ℓ , 〈Aℓxℓ , yℓ〉 = a(xℓ, yℓ) for all xℓ, yℓ ∈ Zℓ.
31

We seek for solutions z, zℓ of the variational formulations
a(z, y) = f(y) for all y ∈ Z,a(zℓ, yℓ) = f(yℓ) for all yℓ ∈ Zℓ,
where f ∈ Z∗. We call zℓ the Galerkin approximation of z.
Lemma 7.9. With the notation from Definition 7.8, the following two statements areequivalent
• Stability: A and Aℓ are bijective and there holds
‖A−1ℓ ‖ ≤ C,
where C > 0 is independent of the choice of Zℓ.
• Cea-Lemma: A is bijective and if there exists the Galerkin approximation zℓ for aclosed subspace Zℓ ⊂ Z, there holds
‖z − zℓ‖Z ≤ C infxℓ∈Zℓ
‖z − xℓ‖Z ,
where C > 0 is independent of the choice of Zℓ.
Proof. Step 1, Stability implies Cea-Lemma: The bijectivity of A and Aℓ yield the exis-tence of z and the respective Galerkin approximation zℓ. For arbitrary xℓ ∈ Zℓ holds
‖zℓ − xℓ‖Z = ‖A−1ℓ Aℓ(zℓ − xℓ)‖Z ≤ C‖Aℓ(zℓ − xℓ)‖Z∗ = C sup
yℓ∈Zℓ, ‖yℓ‖Z=1
a(zℓ − xℓ, yℓ).
Fix yℓ ∈ Zℓ with ‖yℓ‖Z = 1, to see
a(zℓ − xℓ, yℓ) = f(yℓ)− a(xℓ, yℓ) = a(z − xℓ, yℓ) ≤ ‖a‖‖z − xℓ‖Z .
Consequently, we conclude
‖zℓ − xℓ‖Z ≤ C‖a‖‖z − xℓ‖Z .
The triangle inequality yields
‖z − zℓ‖Z ≤ ‖z − xℓ‖Z + ‖zℓ − xℓ‖Z ≤ (1 + C‖a‖)‖z − xℓ‖Z .
Taking the infimum over all xℓ ∈ Zℓ proves the Cea-Lemma.Step 2, Cea-Lemma implies Stability: At first, we want to prove the bijectivity of Aℓ. Letzℓ, zℓ ∈ Zℓ with Aℓzℓ = Aℓzℓ. Then, there holds by definition
a(zℓ, yℓ) = 〈Aℓzℓ , yℓ〉 = 〈Aℓzℓ , yℓ〉 = a(zℓ, yℓ) = 〈Azℓ , yℓ〉 for all yℓ ∈ Zℓ.
32

Thus, zℓ ∈ Zℓ is a Galerkin approximation of zℓ. Therefore, the Cea-Lemma implies‖zℓ− zℓ‖Z ≤ C infxℓ∈Zℓ
‖zℓ−xℓ‖Z = 0. It is an elementary result from Linear Algebra thatthe injectivity of the finite-dimensional operator Aℓ implies its bijectivity. Let Aℓzℓ =: fℓ ∈Z∗ℓ and f ∈ Z∗ be an extension of fℓ with ‖fℓ‖Z∗
ℓ= ‖f‖Z∗, then
a(zℓ, yℓ) = fℓ(yℓ) = f(yℓ) = a(A−1f, yℓ) for all yℓ ∈ Zℓ.
Thus, zℓ is a Galerkin approximation of z := A−1f and therefore the Cea-Lemma states
‖zℓ‖Z ≤ ‖zℓ − z‖Z + ‖z‖Z ≤ C‖z − yℓ‖Z + ‖z‖Z for all yℓ ∈ Zℓ.
Choose yℓ = 0 to see
‖A−1ℓ fℓ‖Z = ‖zℓ‖Z ≤ (C + 1)‖z‖Z = (C + 1)‖A−1f‖Z ≤ (C + 1)‖A−1‖‖f‖Z∗
= (C + 1)‖A−1‖‖fℓ‖Z∗
ℓ,
where the open mapping theorem implies the boundedness of A−1.
Let Xℓ ⊆ H1(Ωint) and Yℓ ⊆ H−1/2(Γ) denote finite-dimensional subspaces and let a1 anda2 denote the bilinear forms induced by (38) and (46), i.e.
a1((u, v), (φ, ψ)) = a(u, v)− 〈φ, v〉Γ + 〈(
12−K
)u , ψ〉Γ + 〈V φ, ψ〉Γ, (49)
a2((u, v), (φ, ψ)) = a(u, v) + 〈(K ′ − 1
2
)φ, v〉Γ + 〈Wu, v〉Γ + 〈
(12−K
)u , ψ〉Γ + 〈V φ, ψ〉Γ,
(50)
for all (u, v), (φ, ψ) ∈ H1(Ωint)×H−1/2(Γ). For (d1, d2) ∈ H−1(Ωint)×H1/2(Γ), we definethe solutions (u1, φ1) ∈ H1(Ωint) × H−1/2(Γ) and (u1
ℓ , φ1ℓ) ∈ Xℓ × Yℓ as well as (u2, φ2) ∈
H1(Ωint)×H−1/2(Γ) and (u2ℓ , φ
2ℓ) ∈ Xℓ × Yℓ by
a1((u1, φ1), (v, ψ)) = d1(v) + d2(ψ) for all (v, ψ) ∈ H1(Ωint)×H−1/2(Γ)
a1((u1ℓ , φ
1ℓ), (vℓ, ψℓ)) = d1(vℓ) + d2(ψℓ) for all (vℓ, ψℓ) ∈ Xℓ × Yℓ
a2((u2, φ2), (v, ψ)) = d1(v) + d2(ψ) for all (v, ψ) ∈ H1(Ωint)×H−1/2(Γ)
a2((u2ℓ , φ
2ℓ), (vℓ, ψℓ)) = d1(vℓ) + d2(ψℓ) for all (vℓ, ψℓ) ∈ Xℓ × Yℓ
Note that Theorem 6.3 and Theorem 7.6 state the existence of these solutions.
Theorem 7.10. With the notation from above holds
‖ui−uiℓ‖H1(Ωint) +‖φi−φiℓ‖H−1/2(Γ) ≤ C inf(vℓ,ψℓ)∈Xℓ×Yℓ
(‖ui − vℓ‖H1(Ωint) + ‖φi − ψℓ‖H−1/2(Γ)
),
for i = 1, 2. The constant C > 0 is independent of the choice of Xℓ and Yℓ.
Proof. We consider the Hilbert space Z := H1(Ωint)×H−1/2(Γ) and the subspaces Zℓ :=Xℓ × Yℓ. The bilinear forms in (49) induce the operators A and Aℓ as in Definition 7.8.Recall that Theorem 6.3 and Theorem 7.6 state that stability holds for both methods fromSection 6 and Section 7. Now, Lemma 7.9 proves the statement.
33

8 A Posteriori Error Estimates
8.1 Residual-Based Error Estimates
In this section, we want to present a residual-based a posteriori error estimator, proposedby C. Carstensen and E. Stephan in [6]. Before we can proceed, we need somenotation. We define the open convex hull of points x1, . . . , xn ∈ R
2 by
conv(x1, . . . , xn) = n∑
j=1
ajxj : 0 < aj < 1 ,
n∑
j=1
aj = 1.
Definition 8.1. Let Ωint be as in (1) but additionally with polygonal boundary Γ. Weconsider the family T := (Tℓ)ℓ∈I of triangulations of Ωint, where
Tℓ = T1, . . . , TNℓ,
and Ti is an open triangle, i.e there are nodes V 1i , V
2i , V
3i ∈ R
2 such that
Ti = conv(V 1i , V
2i , V
3i ).
We define the edges Eji , j = 1, 2, 3 of Ti by
E1i = conv(V 1
i , V2i ) E2
i = conv(V 2i , V
3i ) E3
i = conv(V 3i , V
1i ).
Additionally, we claim
Ti ∩ Tj = ∅, i 6= j,
Nℓ⋃
j=1
Tj = Ωint.
For two triangles Ti, Tj ∈ Tℓ with Ti 6= Tj holds exactly one of the following conditions:
• Ti and Tj are not neighboured, i.e. Ti ∩ Tj = ∅.
• Ti and Tj share a common edge, i.e ∂Ti ∩ ∂Tj = Eki ∩Ek′
j , k, k′ ∈ 1, 2, 3.
• Ti and Tj share a common node, i.e ∂Ti ∩ ∂Tj = V ki ∩ V k′
j , k, k′ ∈ 1, 2, 3.
We defineSℓ := Ej
i : i = 1, . . . , Nℓ, j = 1, 2, 3.Let
Eℓ := E ∈ Sℓ : E ⊆ Γbe the set of boundary sides and let
S0ℓ := Sℓ \ Eℓ
34

denote the set of interior sides. We define the shape regularity constant by
σ(Tℓ) := maxTi∈Tℓ
diam(Ti)2
|Ti|.
For any ℓ ∈ I, the triangulation Tℓ induces spaces Xℓ and Yℓ
Xℓ := ηℓ ∈ C(Ωint) : ηℓ|Ti∈ P1 for any Ti ∈ Tℓ =: S1(Tℓ),
Yℓ := ξℓ ∈ L∞(Ωint) : ξℓ|E ∈ P0 for any E ∈ Eℓ =: P0(Eℓ).By ∂n and ∂en, we denote in the following the interior and exterior normal derivatives onany element boundary. More precisely, let E ∈ Sℓ denote an edge of Ti ∈ Tℓ. Then, thereholds
∂nuℓ(x0) = limx∈Ti, x→x0
∇uℓ(x) · n, ∂enuℓ(x0) = limx∈Ti
c, x→x0
∇uℓ(x) · n, x0 ∈ E,
where n is the outward pointing normal vector on E w.r.t. Ti. By [∂n · ] = ∂n − ∂en, wedenote the jump over the side of a triangle. We will also need the local mesh size functionhℓ : Ωint → R, where h(x) = diam(Ti) for x ∈ Ti ∈ Tℓ and h(x) = diam(E) for x ∈ E ∈ Sℓ.Define the quantities
R21 :=
∑
∆∈Tℓ
diam(∆)2
∫
∆
|f |2 dx = ‖hℓf‖2L2(Ωint),
R22 :=
∑
E∈S0ℓ
diam(E)
∫
E
[∂nuℓ]2 dΓ = ‖h1/2
ℓ [∂nuℓ]‖2L2(S
S0ℓ )
R3 := ‖h1/2ℓ
(φ0 − ∂nuℓ +W (u0 − uℓ)− (K ′ − 1
2)φℓ)‖L2(Γ),
R4 := ‖h1/2ℓ
((1
2−K)(u0 − uℓ)− V φℓ
)′ ‖L2(Γ).
There holds the following a posteriori estimate for the solutions (u, φ) ∈ H1(Ωint) ×H−1/2(Γ) of (40) and (uℓ, φℓ) ∈ Xℓ × Yℓ of (44).
Theorem 8.2. There exists a constant C > 0, such that
‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ) ≤ C · (R1 +R2 +R3 +R4),
where C > 0 depends on Ωint and the shape regularity constant σ(Tℓ).The proof of Theorem 8.2 is split into several lemmas. The original paper [6] gives theproof for a more general model problem. If there are no simplifications due to the differentconditions, we will refer to that paper. Throughout this section, we use
e := u− uℓ, ε := φ− φℓ, δ := 12
(ε+ V −1(1
2−K)e
)∈ H−1/2(Γ),
as well as
‖(uℓ, φℓ)‖× := ‖uℓ‖H1(Ωint) + ‖φℓ‖H−1/2(Γ) for all (uℓ, φℓ) ∈ H1(Ωint)×H−1/2(Γ).
35

Lemma 8.3. For some constant β > 0 holds
β‖(e, ε)‖×‖(e, δ)‖× ≤ T1 + T2 + T3 + T4,
where, for any (vℓ, ψℓ) ∈ Xℓ × Yℓ,
T1 :=∑
∆∈Tℓ
∫
∆
f(e− vℓ) dx,
T2 := −∑
E∈S0ℓ
∫[∂nuℓ(e− vℓ)] dΓ,
T3 := 〈φ0 − ∂nuℓ +W (u0 − uℓ)− (K ′ − 12)φℓ , e− vℓ〉Γ,
T4 := 〈δ − ψℓ , (12−K)(u0 − uℓ)− V φℓ〉Γ.
Proof. Step 1: Recall the bilinear form a2 in (49), to rewrite the symmetric coupling (40)as
a2((u, φ)(v, ψ)) = a(u, v) + 〈(K ′ − 12)φ, v〉Γ + 〈Wu, v〉Γ + 〈(1
2−K)u , ψ〉Γ + 〈V φ, ψ〉Γ
= L(v, ψ)(51)
with the respective right-hand side
L(v, ψ) := 〈f , v〉Ωint + 〈φ0 +Wu0 , v〉Γ + 〈(12−K)u0 , ψ〉Γ.
Now, we want to prove a lower bound for the following term
a2((e, ε)(e, δ)) := a(e, e) + 〈(K ′ − 12)ε , e〉Γ + 〈We, e〉Γ + 〈(1
2−K)e , δ〉Γ + 〈V ε , δ〉Γ. (52)
By definition of δ, this is equivalently written as
a2((e, ε)(e, δ)) = a(e, e) + 〈(K ′ − 12)ε , e〉Γ + 〈We, e〉Γ + 1
2〈e , (1
2−K ′)ε〉Γ
+12〈e , (1
2−K ′)V −1(1
2−K)e〉Γ + 1
2〈V ε , ε+ V −1(1
2−K)e〉Γ
By use of the Steclow-Poincare operator S from Lemma 7.4, this reads
a2((e, ε)(e, δ)) = a(e, e) + 12〈We, e〉Γ + 1
2〈Se, e〉+ 1
2〈V ε , ε〉Γ.
Due to Theorem 2.4, a(e, e) + 12〈Se, e〉Γ is bounded below by C‖e‖2H1(Ωint) for some C > 0.
With the ellipticity of V −1 and the semidefiniteness of W , we obtain that a2((e, ε)(e, δ)) isbounded below
a2((e, ε)(e, δ)) ≥ C(‖e‖2H1(Ωint) + ‖ε‖2H−1/2(Γ)) ≥ C2‖(e, ε)‖2×.
With ‖δ‖H−1/2(Γ) ≤ C(‖ε‖H−1/2(Γ) + ‖e‖H1(Ωint)) = C‖(e, ε)‖×, where C depends on thecontinuity of V −1 and K, there holds ‖(e, δ)‖× ≤ β−1‖(e, ε)‖× for some β > 0. Conse-quently,
a2((e, ε)(e, δ)) ≥ C2‖(e, ε)‖2× ≥ C
2β‖(e, ε)‖×‖(e, δ)‖×.
36

Step 2: There holds the Galerkin-Orthogonality
a2((e, ε)(vℓ, ψℓ)) = 0 for all (vℓ, ψℓ) ∈ Xℓ × Yℓ,
thus (51) can be rearranged to
a2((e, ε)(e, δ)) = L(e− vℓ, δ − ψℓ)− a2((uℓ, φℓ)(e− vℓ, δ − ψℓ)).
By definition of a2 and L, this expression is equal to∫
Ωint
f(e− vℓ)−∇uℓ · ∇(e− vℓ) dx
+ 〈φ0 +W (u0 − uℓ)− (K ′ − 12)φℓ , e− vℓ〉Γ
+ 〈(12−K)(u0 − uℓ)− V φℓ , δ − ψℓ〉Γ.
(53)
Using Green’s formula on each element Ti ∈ Tℓ, we obtain
−∫
Ωint
∇uℓ∇(e− vℓ) dx = −∑
E∈S0ℓ
∫
E
[∂nuℓ](e− vℓ) dΓ
−〈∂nuℓ , e− vℓ〉Γ.(54)
The combination of (53) and (54) leads us to
L(e− vℓ, δ − ψℓ)− a2((uℓ, φℓ), (e− vℓ, δ − ψℓ)) = T1 + T2 + T3 + T4,
which concludes the proof.
Now, we define the Clement-Operator Iℓ. For further information on Iℓ see e.g. [7] or[11]. The following lemma is taken from [7] and states the property of Iℓ which makes theanalysis work.
Lemma 8.4. Let Iℓ : H1(Ωint) → Xℓ denote the Clement-Operator for all ℓ ∈ I. WithC > 0, the following holds. For any Ti ∈ Tℓ and integers k, q with 0 ≤ k ≤ q ≤ 2,
|Iℓu− u|2Hk(Ti)≤ C · diam(Ti)
2(q−k)|u|2Hq(N),
where N :=⋃Tj ∈ Tℓ : Tj ∩ Ti 6= ∅ is the set of all neighbor elements.
For the proof of the following Lemma, we refer to [6, Lemma 8, 10, 11].
Lemma 8.5. By choosing vℓ = Iℓe, we obtain
T1 ≤ C‖∇e‖L2(Ωint)R1,
T2 ≤ C‖∇e‖L2(Ωint)R2,
T3 ≤ C‖∇e‖L2(Ωint)R3,
where C only depends on T .
37

Lemma 8.6. For r := (12−K)(u0 − uℓ)− V φℓ we have
‖r‖H1/2(Γ) ≤ C‖h1/2ℓ r′‖L2(Γ) = CR4. (55)
This yieldsT4 ≤ ‖δ − ψℓ‖H−1/2(Γ)‖r‖H1/2(Γ) ≤ C‖δ − ψℓ‖H−1/2(Γ)R4. (56)
Proof. The estimate in (55) is proved in [4]. The conclusion (56) is an obvious consequenceof the definition of T4.
Proof of Theorem 8.2. By use of Lemma 8.3, Lemma 8.5, and Lemma 8.6, we obtain
β‖(u− uℓ, φ− φℓ)‖×‖(e, δ)‖× ≤ T1 + T2 + T3 + T4
≤ C‖∇e‖L2(Ωint)(R1 +R2 +R3) + C‖δ − ψℓ‖H−1/2(Γ)R4
≤ C‖e‖H1(Ωint)(R1 +R2 +R3) + C‖δ − ψℓ‖H−1/2(Γ)R4.
If we set ψℓ = 0, there holds
‖(u− uℓ, φ− φℓ)‖×‖(e, δ)‖× ≤ C‖(e, δ)‖×(R1 +R2 +R3 +R4).
Division by ‖(e, δ)‖× concludes the proof.
8.2 Error Estimates Based on the H −H/2 Strategy
A rather classical approach to derive an a posteriori estimate is presented in this section. Asin the previous section, we define the Triangulation Tℓ, the set of edges Sℓ, the triangulationof the boundary Eℓ as well as the induced spaces Xℓ and Yℓ, cf. Definition 8.1. Additionally,we consider the triangulation Tℓ which is generated from Tℓ by uniform refinement (bisec3),
see Section 11.1 for details. Analogously, Tℓ induces the spaces Xℓ and Yℓ. There holds
Xℓ ⊂ Xℓ and Yℓ ⊂ Yℓ.
Let (uℓ, φℓ) ∈ Xℓ × Yℓ and (uℓ, φℓ) ∈ Xℓ × Yℓ denote solutions of (44) with respect to thesame data (f, u0,ℓ, φ0) ∈ H1(Ωint)×H1/2(Γ)×H−1/2(Γ) but with different discrete spaces.
Here, ITℓ : C(Ωint)→ S1(Tℓ) denotes the nodal interpolation operator w.r.t. the “coarse”mesh Tℓ and u0,ℓ = Iℓu0. The approximation of uℓ is mandatory, because the involved right-hand side terms 〈Wu0 , vℓ〉Γ and 〈Ku0 , ψ〉Γ can hardly be computed analytically. Now, wedefine the error estimator µℓ as follows
µℓ :=(‖(1− ITℓ )uℓ‖2H1(Ωint) + ‖h1/2
ℓ (1− Πℓ)φℓ‖2L2(Γ)
)1/2
. (57)
By Πℓ : L2(Γ) → P0(Eℓ), we denote the L2-orthogonal projection. Further, we define thedata oscillations oscℓ as
oscℓ := ‖h1/2ℓ (u0 − u0,ℓ)
′‖L2(Γ),
where (·)′ denotes the arclength derivative along Γ. The data oscillation term allows usto control the error, which arises from approximating the dirichlet data u0 by its nodalinterpolant u0,ℓ. Let (u∗ℓ , φ
∗ℓ) ∈ Xℓ× Yℓ be the non perturbed solution of (44) with respect
to the data (f, u0, φ0). Then, we obtain the following result.
38

Lemma 8.7. There holds the approximation error estimate
C1
(‖u∗ℓ − uℓ‖H1(Ωint) + ‖φ∗
ℓ − φℓ‖H−1/2(Γ)
)≤ ‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ) ≤ C2oscℓ,
where (u, φ) ∈ H1(Ωint)×H−1/2(Γ) denotes the exact solution of (40).
For a proof, we refer to [2, Proposition 1]. Parts of the analysis need the following assump-tion to work:Saturation Assumption: There exists a constant 0 < q < 1 which may only depend on T0such that
‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ) ≤ q(‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ)
). (58)
With some minor restrictions, the saturation assumption can be proved for the finite ele-ment method, however, there are no results available for the boundary element method or forFEM-BEM coupling. Many numerical experiments underline the saturation assumption,cf. Section 12.
Theorem 8.8. The error estimator µℓ is efficient, i.e. there holds
µℓ ≤ C(‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ) + oscℓ),
where C > 0 is independent of the choice of Tℓ. Under the saturation assumption (58), wecan also prove reliability, i.e.
‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ) ≤ C(µℓ + oscℓ).
A prove of this result can be found in [2].
39

9 Overview on the Implementation
The following implementation of the coupling methods from Section 6 and Section 7 allowsto consider a more general model problem as (1).
−div(A∇ui) = f in Ωint,−∆ue = 0 in Ωext,ui − ue = u0 on Γ,
(A∇ui −∇ue) · n = φ0 on Γ,ue(x) = O(log |x|) as |x| → ∞.
(59)
As in Section 1, Ωint is a bounded Lipschitz domain in R2 with boundary Γ := ∂Ω and
outer unit normal vector n. The given data satisfy f ∈ L2(Ωint), u0 ∈ H1/2(Γ), andφ0 ∈ H−1/2(Γ). The implementation of the operator A : (L2(Ωint))2 → (L2(Ωint))2 allowsthe following situations.
• Linear Case: A is the identity.
• Nonlinear Case: A is of the form
A(x) = ρ(|x|)x x ∈ R2,
where ρ : R→ R.
The directories of the implementation are organized as follows:
FEMBEM/code/input/output/postproc/setup scripts/
code/ contains the source code of all functions, input/ contains the input data forthe problems to be computed. The results are stored in output/ . setup scripts/contains some scripts which allow to perform some numerical examples. The results of theso called post-processing, i.e. plotting the approximation error, or the computational time,are stored in postproc/ .
10 Preliminaries
10.1 Triangulation
As in Section 8, we assume the domain Ωint to be a polygon. By Tℓ, we denote a particulartriangulation of Ωint, and by Eℓ we denote its restriction to the boundary, cf. Definition 8.1.We call the pair (Tℓ, Eℓ) a mesh. By (Tℓ, Eℓ), we denote the uniform refinement of the mesh(Tℓ, Eℓ). The uniform refinement is done via bisec3 as explained in Section 11.1.
40

10.2 Discrete Integral Operators
In Section 7.2, we defined the discrete operators Vℓ, Kℓ, K′ℓ, and Wℓ. These operators are
used to compute the numerical approximation. The corresponding matrices (e.g. used inSection 11.2) are computed by the functions
buildVbuildKbuildW
These functions are part of the Matlab BEM library HILBERT, cf. [1].
10.3 Discrete Spaces
The numerical solutions (uℓ, φℓ) of the computations belong to the Hilbert space H1(Ωint)×H−1/2(Γ). As discrete subspaces Xℓ and Yℓ, we choose
Xℓ := S1(Tℓ) and Yℓ := P0(Eℓ).
We choose the canonical basis functions (ηi)ni=1 of S1(Tℓ) and (ξi)
mi=1 of P0(Eℓ), i.e.
ηi(Vj) = δij and ξk(x) =
1 , x ∈ τk0 , x ∈ Eℓ \ τk
for all 1 ≤ i, j ≤ n, 1 ≤ k ≤ m,
where (Vj)nj=1 are the nodes of Tℓ and (τk)
mk=1 are the elements of Eℓ.
10.4 Data Structures
10.4.1 The Arrays coordinates, elements, and dirichlet
The arrays coordinates , elements , and dirichlet represent the given meshes Tℓand Eℓ. The size of the arrays is denoted by
size (coordinates) = [nC,2] ,
size (elements) = [nE,3] ,
size (dirichlet) = [nD,2] .
coordinates(j,:) contains the coordinates of the j -th node Vj of Tℓ,elements(s,:) contains the numbers of the three nodes of Ts ∈ Tℓ anddirichlet(s,:) contains the numbers of the two endpoints of Es ∈ Eℓ. Par-ticularly, coordinates(elements(s,:),:) is a 3 × 2-array which contains thecoordinates of the three nodes of the s-th volume element Ts ∈ Tℓ, as well ascoordinates(dirichlet(s,:),:) is a 2×2-array which contains the coordinates ofthe two endpoints of the s-th boundary element Es ∈ Eℓ.
41

10.4.2 The Array x
After sorting the arrays elements , dirichlet , and coordinates with the functionsortBoundaryNodesLast , the (nC+ nD)× 1-array x represents the solution (uℓ, φℓ) ∈Xℓ × Yℓ in the following way
uℓ =
nC∑
i=1
x(i) ηi and φℓ =
nC+nD∑
i=nC+1
x(i) ξi−nC. (60)
11 Implementation
11.1 Local Mesh Refinement
The function refineMesh provides uniform and adaptive mesh refinement of the volumemesh Tℓ and the boundary mesh Eℓ. The uniform refinement is done via bisec3 refinement onthe volume mesh and via bisection of the elements on the boundary mesh. If requested, thearrays father2vol and father2dir are provided. The nC×4-array father2vol linksthe refined elements represented by elements fine and the original elements representedby elements as well as their nodes. We assume that the i-th element (1 ≤ i ≤ nC) isrefined with:
• No refinement: There holds, father2vol(i,:)=( e1i , e1i , e
1i , e
1i ) , where
1 ≤ e1i ≤ size (elements fine,1) is the number of the new (=old) element.
• First edge refined: There holds, father2vol(i,:)=( e1i , e1i , e
2i , e
2i ) , where 1 ≤ e1i , e
2i ≤
size (elements fine,1) are the numbers of the new elements.
• First and second edge refined: There holds, father2vol(i,:)=( e1i , e1i , e
2i , e
3i ) , where
1 ≤ e1i , e2i , e
3i ≤ size (elements fine,1) are the numbers of the new elements.
• First and third edge refined: There holds, father2vol(i,:)=( e1i , e2i , e
3i , e
3i ) , where
1 ≤ e1i , e2i , e
3i ≤ size (elements fine,1) are the numbers of the new elements.
• All edges refined: There holds, father2vol(i,:)=( e1i , e2i , e
3i , e
4i ) , where 1 ≤
e1i , e2i , e
3i , e
4i ≤ size (elements fine,1) are the numbers of the new elements.
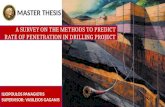
In some applications, eg. Section 11.4, it is good to know the geometric position of thenew nodes. Figure 4 states the position of the nodes of the refined mesh depending onthe type of refinement. The variables j and r denote the respectively colored numbers inFigure 4.
• the numbers of the nodes of the i-th element of the original mesh are given byelements( i, r) .
• elements fine( eki , j) is the number of the j-th node in the element eki of the cor-responding diagram in Figure 4.
42

1 2
3
1 2
3
e1i
(a) no refinement
1
1 2
2 33
1 2
3
e1i e2i
(b) first edge refined
1 1
12
2
23
3
3
1 2
3
e1i
e2i
e3i
(c) first and second edge refined
11
1
2
2
2
3
3
3
1 2
3
e1i
e2i
e3i
(d) first and third edge refined
1
11
1 2
2 2
2
3 3
33
1 2
3
e1i
e2i e3i
e4i
(e) all edges refined
Figure 4: Geometric position of the new nodes.
One remark is that in case of uniform refinement of all elements, the array father2volhas the following structure
father2vol( i, j) = 4(i− 1) + j.
The structure of the nD× 2-array father2dir is much more simple.
• There holds, father2dir( i, :) = (d1i , d
1i ) if the i-th element of Eℓ has not been
refined.
• There holds, father2dir( i, :) = (d1i , d
2i ) if the i-th element of Eℓ has been refined.
Here, d1i and d2
i denote the numbers of the new elements. Note that the son ele-ments Ed1i and Ed2i are located such that coordinates(dirichlet( d1
i , 2),:) =
coordinates(dirichlet( d2i , 1),:) .
11.2 Solving with Symmetric Coupling
In this section, we deal with the solver solveFEMBEMsymm. The function is able to solvethe reformulation of the model problem (1) with symmetric coupling (see Section 7) withthe difference that the terms 〈Wu0 , vℓ〉Γ and 〈Ku0 , ψℓ〉Γ are not computed analytically, but
43

we approximate the function u0 ∈ H1/2(Γ) in S1(Tℓ) and proceed with discrete integraloperators. Thus, we solve the following problem: Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that for all(vℓ, ψℓ) ∈ Xℓ × Yℓ
a(uℓ, vℓ) + 〈(K ′ℓ − 1
2
)φℓ , vℓ〉Γ + 〈Wℓuℓ , vℓ〉Γ = 〈f , vℓ〉Ωint + 〈φ0 +Wℓu0,ℓ , vℓ〉Γ,
〈(
12−Kℓ
)uℓ , ψℓ〉Γ + 〈Vℓφℓ , ψℓ〉Γ = 〈
(12−Kℓ
)u0,ℓ , ψℓ〉Γ, (61)
where u0,ℓ = Iℓu0 ∈ S(Tℓ) denotes the nodal interpolant of u0. The implementation of theform a(·, ·) allows several problems to be considered.
• Linear Case: The operator A in (59) is the identity. There holds
a(uℓ, vℓ) =
∫
Ωint
∇uℓ · ∇vℓ dx.
• Nonlinear Case: The operator A in (59) is given by A∇u = ρ(|∇u|)∇u, u ∈ H1(Ωint),where ρ : R → R. In view of the application of Newton’s method, we restrict toρ ∈ C1(R). Note that existing convergence and solvability results only apply if thenonlinear operator A is Lipschitz continuous and strongly monotone, i.e.
‖Au− Av‖L2(Ωint) . ‖u− v‖L2(Ωint) as well as ‖u− v‖2L2(Ωint) . 〈Au−Av , u− v〉Ωint ,
for all (u, v) ∈ (L2(Ωint))2. There holds
a(u, v) =
∫
Ωint
ρ(|∇uℓ|)∇uℓ · ∇vℓ dx. (62)
Let (uℓ, φℓ) ∈ Xℓ×Yℓ denote a solution of (61) and (u∗ℓ , φ∗ℓ) ∈ Xℓ×Yℓ be a solution of (44).
In the linear case, Theorem 7.6 and Corollary 7.7 state
‖u∗ℓ − uℓ‖H1(Ωint) + ‖φ∗ℓ − φℓ‖H−1/2(Γ) ≤ C‖u0,ℓ − u0‖H1/2(Γ),
where C > 0 does not depend on Xℓ or Yℓ. This result also holds for the nonlinear case.For a proof, we refer to [2, Lemma 2]. The (possibly) nonlinear system induced by (61) issolved by an undampted Newton method. With x ∈ R
n+m being the coefficient vector ofuℓ and φℓ, i.e. uℓ =
∑ni=1 xiηi and φℓ =
∑n+mi=n+1 xiξi−n, the variational form (61) can be
rewritten as follows (N(x)
0
)+Bx = F. (63)
Here, N denotes the multi-valued function
N : Rn+m → R
n, x 7→ (a(uℓ, ηi))ni=1.
The matrix B ∈ R(n+m)×(n+m) is given by
B =
(W KT − 1
2MT
12M−K V
), (64)
44

where
Wi,j = 〈Wℓηj , ηi〉Γ, 1 ≤ i, j ≤ n,(KT − 1
2MT )i,j = 〈
(K ′ℓ − 1
2
)ξj , ηi〉Γ, 1 ≤ i ≤ n, 1 ≤ j ≤ m
(12M−K)i,j = 〈
(12−Kℓ
)ηj , ξi〉Γ, 1 ≤ i ≤ m, 1 ≤ j ≤ n
Vi,j = 〈Vℓξj , ξi〉Γ, 1 ≤ i, j ≤ m.
And finally, the vector F ∈ Rn+m reads
Fi =
〈f , ηi〉Ωint + 〈φ0 +Wℓu0,ℓ , ηi〉Γ, 1 ≤ i ≤ n
〈(
12−Kℓ
)u0,ℓ , ξi−n〉Γ, n+ 1 ≤ i ≤ n+m
. (65)
The implementation provides two possibilities for the evaluation of F , see Section 11.7.2for details. The next step is to determine the Jacobian of the function, we want to driveto zero. Therefore, we need
∂
∂xkN(x) ∈ R
1×(n+m).
For n+1 ≤ k ≤ n+m, the function N does not depend on xk. Thus, the derivative equalszero. We consider the case 1 ≤ k ≤ n. Elementary calculus shows
(∂
∂xkN(x)
)
i
=∂
∂xk
∫
Ωint
ρ(|∇uℓ|)∇uℓ · ∇ηi dx
=
∫
Ωint
∂
∂xkρ(|∇uℓ|)∇uℓ · ∇ηi dx +
∫
Ωint
ρ(|∇uℓ|)∇ηk · ∇ηi dx,
as well as
∂
∂xkρ(|∇uℓ|) = ρ′(|∇uℓ|)
1
|∇uℓ|
n∑
i=1
xi∇ηi∇ηk = ρ′(|∇uℓ|)uℓ|∇uℓ|
∇ηk.
The combination of both results yields(
∂
∂xkN(x)
)
i
=
∫
Ωint
ρ′(|∇uℓ|)|∇uℓ|
∇ηk(∇uℓ)T∇uℓ(∇ηi)T dx+
∫
Ωint
ρ(|∇uℓ|)∇ηk ·∇ηi dx. (66)
Now, the Jacobian of the function x 7→(N(x)
0
)+Bx− F reads
J (x) =
(J(x) 0
0 0
)+B ∈ R
(n+m)×(n+m), (67)
where J(x) ∈ Rn×n is given by J(x)ki =
(∂∂xk
N(x))
i. To solve the nonlinear system (63),
we apply the Newton method given by
xk+1 = xk + δk,
δk := −J (xk)−1
((N(xk)
0
)+Bxk − F
)k ∈ N.
(68)
The first part of the documentation of solveFEMBEMsymm, cf. Listing 1, describes somepreliminary work done by the function.
45

• There are several ways to call the function
[x [,opt.out]]=solveFEMBEMsymm(coordinates,elements, dirichlet, ...
f,u0,grad u0,singularity,n points on layer, n layers, ...
phi0 direct or projected [,opt.in]) ,
The output parameter opt.out is always optional. The following combinations foropt.in are allowed:
• Linear Case: opt.in = RHSdir or opt.in is not given.
• Nonlinear Case: opt.in = xstart, rho, rhoprime oropt.in = xstart, rho, rhoprime, RHSdir .
The arrays coordinates , elements , and dirichlet represent the given mesh.These arrays have to be sorted by the function sortBoundaryNodesLast , cf. Sec-tion 11.7.3. The function handles f , u0, and grad u0 denote the volume force f , thetrace jump u0, as well as the jump of the normal derivative φ0 in (59). The parameterxstart contains the starting value x0 for the Newton method (68). Note that xstarthas to be sorted by sortBoundaryNodesLast . rho and rhoprime contain thefunction ρ and its derivative ρ′ from (62). RHSdir contains a part of the right handside. A more detailed explanation follows below. The parameters singularity ,n points on layer , and n layers steer the hp-quadrature in Section 11.7.2.
• At first, we check the correct number of input parameters and if the optional out-put parameter is requested compute bdir=1 (Line 3-32). Further, the function de-termines if the problem is nonlinear (lin=false ) and declares the respective vari-ables xstart , rho , rhoprime . If parts of the right hand side are given we setcompute b=0 .
• Note that the input parameter xstart is a (nC+nD) × 1-array. There holds n =nCand m =nD. (Line 35-37).
• (Line 39-41) The number of boundary nodes is determined. Note that equality of nBNand nD is not mandatory, e.g. in case of an open boundary.
• (Line 42-74) Some useful variables are declared. We allocate the solution vector x inLine 45. One can consider x as the implementation of the vector x ∈ R
n+m, cf. Sec-tion 10.4.2. In Line 48 we determine the first entry of coordinates which belongs toa node Vi of Tℓ with Vi ∈ Γ. To build the Integral operators, we need the numeration forthe boundary elements to start with 1. Therefore, we define dirichlet modifiedin Line 56.
Listing 1: Solving with Symmetric Coupling: Preliminaries
1 function [x, varargout ] = solveFEMBEMsymm(coordinates,elements,dirichlet,f, u0,grad u0, ...2 singularity,n points on layer, n layers,phi0 direct or projected, varargin )
46

3 if ( nargin ==13)4 lin=false;5 xstart= varargin 1;6 rho= varargin 2;7 rhoprime= varargin 3;8 compute b=1;9 elseif ( nargin ==14)
10 lin=false;11 xstart= varargin 1;12 rho= varargin 2;13 rhoprime= varargin 3;14 RHSdir= varargin 4;15 compute b=0;16 elseif ( nargin ==11)17 lin=true;18 RHSdir= varargin 1;19 compute b=0;20 elseif ( nargin ==10)21 lin=true;22 compute b=1;23 else24 error( 'solveFEMBEMsymm: Wrong number of input parameters' );25 end26 if ( nargout ==2)27 compute bdir=1;28 elseif ( nargout ==1)29 compute bdir=0;30 else31 error( 'solveFEMBEMsymm: Wrong number of output parameters' );32 end33
34 %%% Some useful constants of mesh data35 nE=size (elements,1); %number of elements36 nC=size (coordinates,1); %number of nodes37 nD=size (dirichlet,1); %number of boundary elements38
39 %%% store the unique nodes of dirichlet in boundary nodes40 [boundary nodes]= unique (dirichlet);41 nBN=length (boundary nodes); %number of boundary nodes42
43
44 %%% Allocate solution vector45 x=zeros (nC+nD,1);46
47 %%% index of the first boundary node in coordinates48 first boundary node=nC−nBN+1;49
50 %%% index of the first boundary element in the solution51 first boundary element=nC+1;52
53 %%% degrees of freedom
47

54 degrees of freedom=nC+nD;55
56 dirichlet modified=dirichlet −first boundary node+1;57
58 %%% First vertex of elements and corresponding edge vectors59 c1=coordinates(elements(:,1),:);60 d21=coordinates(elements(:,2),:) −c1;61 d31=coordinates(elements(:,3),:) −c1;62
63 %%% dBE stores the vectors of the boundary elements accordin g to64 %%% definition of orientation65 dBE=coordinates(dirichlet(:,2),:) −coordinates(dirichlet(:,1),:);66
67 %%% later on we will need 2 * midpoints of the boundary elements68 midpoints2 BE=coordinates(dirichlet(:,1),:)+coordinates(dirich let(:,2),:);69
70 %*** Vector of element areas 4 * |T |71 area4=2 * (d21(:,1). * d31(:,2) −d21(:,2). * d31(:,1));72
73 %%% vector that holds the lengths of boundary elements74 lengthBE= sqrt ( sum(dBE. * dBE,2));
The second part of solveFEMBEMsymm(cf. Listing 2) builds the integral operators andassembles the right and left hand side of the equations.
• (Line 2-7) The ingredients for the classical FEM Galerkin matrix
Aij =
∫
Ωint
∇ηj∇ηi dx 1 ≤ i, j ≤ nC (69)
are prepared. The array A is organized as follows
ATsisjs :=
∫
Ts
∇ηj∇ηi dx 1 ≤ is, js ≤ 3, 1 ≤ s ≤ nE,
where j = elements( s, js) , i = elements( s, is) and Ts ∈ Tℓ.
A =(· · · , ATs
11, ATs21 , ATs
31, ATs12, ATs
22, ATs32 , ATs
13, ATs23, ATs
33, . . .)T.
• (Line 11-30) The discrete integral operators Vℓ, Wℓ, and Kℓ are assembled. Due tothe storage of the matrices with Matlab’s sparse function, we need three arraysper operator: One that contains the entries of the matrix, and two which provideinformation, where (number of row and column) to store the entries. The detailedposition is explained below.
• (Line 17-20) Here, the 12
matrix from 〈(12−K)ηj , ξi〉Γ is built. Note that ηj |Ei
, Ei ∈ Eℓis, if not zero, a linear function with ηj(a) = 0 and ηj(b) = 1, where a, b are theendpoints of Ei. There holds 1
2〈ηj , ξi〉Γ = 1
4diam(Ei) exactly if ηj is associated either
with a or with b.
48

• (Line 20) The matrix OnehalfMat is used later on to build the right hand side.
• (Line 33-35) Now, we assemble the big sparse matrix SysMat . The position of theentries can be seen in (64), but note that for 1 ≤ i ≤ firstBoundaryNode −1 holds ηi|Γ ≡ 0. Thus, the discrete integral operators are only built forηi, firstBoundaryNode ≤ i ≤ nC = n, see also the respective row and columnarrays in Line 12-13, 23-24, 28-29.
• We proceed with the assembly of the right hand side b. The (nC + nD) × 1-array b is organized similar to the vector F in (65), only the ordering of (ξi)
mi=1
is determined by the array dirichlet . Again, there holds 〈· , ηi〉Γ = 0 for all1 ≤ i ≤ firstBoundaryNode − 1, e.g. see the row entries in Line 66-67.
• (Line 41) We use a one point quadrature rule (midpoint rule) for the evaluation of〈f , ηi〉Ωint .
• (Line 44) As seen in (61), the trace jump u0 is approximated by its nodal interpolantin S1(Tℓ).
• (Line 47-53) The variable phi0 direct or projected decides whether 〈φ0 , ηi〉Γis computed with computePhi0Rhs or computeProjPhi0 , see Section 11.7.2 fordetails.
• (Line 56-74) If RHSdir is not given and opt.out not requested, i.e. compute b=0and compute bdir=0 (“usual case”), the array b is assembled by accumarray .If the Dirichlet part of the right hand side (e.g. for post-processing) is requested(compute bdir=1 ) we split b in two parts
bvol(i) = 〈f , ηi+firstBoundaryNode 〉Ωint , 1 ≤ i ≤ nBN,
bdir(i) =
〈φ0 +Wu0,ℓ , ηi+firstBoundaryNode 〉Γ, 1 ≤ i ≤ nBN
〈(
12−K
)u0,ℓ , ξi−nBN〉Γ, nBN+ 1 ≤ i ≤ nBN+ nD
,
and add them in Line 63.
• (Line 65) The output parameter RHSdir is set.
• (Line 73-75) If the Dirichlet part of the right hand side is given, we just have toassemble bvol and add RHSdir .
Listing 2: Solving with Symmetric Coupling: Part 2
1 %%% rows, cols and values for the stiffness matrix of −div(grad u)2 rowsA= reshape (elements(:,[1 2 3 1 2 3 1 2 3])',9 * nE,1);3 colsA= reshape (elements(:,[1 1 1 2 2 2 3 3 3])',9 * nE,1);4 a=( sum(d21. * d31,2)./area4)';
49

5 b=( sum(d31. * d31,2)./area4)';6 c=( sum(d21. * d21,2)./area4)';7 A=[−2* a+b+c;a −b;a −c;a −b;b; −a;a −c; −a;c];8
9 %%%−−− Assembly of the left hand side −−−10
11 %%% assembly of W: hypersingular integral operator12 rowsW=repmat ([first boundary node:nC]',nBN,1);13 colsW= reshape ( repmat ([first boundary node:nC],nBN,1),nBN * nBN,1);14 W=buildW(coordinates(first boundary node:nC,:),dirichlet modified,1);15
16 %%% assembly of "1/2" in context with K17 rowsOnehalf= repmat ([first boundary element:degrees of freedom]',2,1);18 colsOnehalf=dirichlet(:);19 Onehalf=0.25 * repmat (lengthBE,2,1);20 OnehalfMat= sparse ( repmat ([1:nD]',2,1),dirichlet modified(:),Onehalf);21
22 %%% assembly of K: double layer potential23 rowsK= repmat ([first boundary element:degrees of freedom]',nBN,1);24 colsK= reshape ( repmat ([first boundary node:nC],nD,1),nD * nBN,1);25 K=buildK(coordinates(first boundary node:nC,:),dirichlet modified,1);26
27 %%% assembly of V: single layer potential28 rowsV= repmat ([first boundary element:degrees of freedom]',nD,1);29 colsV= reshape ( repmat ([first boundary element:degrees of freedom],nD,1),nD * nD,1);30 V=buildV(coordinates(first boundary node:nC,:),dirichlet modified,1);31
32 %*** Assembly of the Matrix for the linear part of the operator (th e BEM−part)33 SysMat= sparse ([rowsW; rowsOnehalf; rowsK; colsOnehalf; colsK; rowsV], ...34 [colsW; colsOnehalf; colsK; rowsOnehalf; rowsK; colsV], ...35 [W(:); Onehalf; −K(:); −Onehalf; K(:); V(:)]);36
37
38 %%%−−− Assembly of the right −hand side −−−39
40 %%% Values of the volume force f41 fsT= feval (f,c1+(d21+d31)/3);42
43 %%% compute u0h:=I h(u0) =ˆ the nodal interpolant of u044 u0h= feval (u0,coordinates(first boundary node:nC,:));45
46 %%% computing of phi0 for the rhs47 if strcmp(phi0 direct or projected, 'projected' )48 phi0 rhs= repmat (computeProjPhi0(coordinates,dirichlet,grad u0,singularity, ...49 n points on layer,n layers). * lengthBE/2,1,2);50 else51 phi0 rhs=computePhi0Rhs(coordinates,dirichlet,grad u0,singularity, ...52 n points on layer,n layers);53 end54
55 %%% build the right hand side
50

56 if (compute b)57 if (compute bdir)58 bvol = accumarray ([elements(:)],[ repmat (12 \area4. * fsT,3,1)],[nC,1]);59 bdir= accumarray ([[1:nBN]';dirichlet(:) −first boundary node+1; ...60 [first boundary element:degrees of freedom]' −first boundary node+1], ...61 [W* u0h; reshape (phi0 rhs,2 * nD,1); ...62 (OnehalfMat −K) * u0h],[degrees of freedom −first boundary node+1,1]);63 b=[bvol(1:first boundary node−1);bvol(first boundary node:nC)+ ...64 bdir(1:nBN);bdir(nBN+1: end )];65 varargout 1=bdir;66 else67 b=accumarray ([[elements(:)];[first boundary node:nC]';dirichlet(:); ...68 [first boundary element:degrees of freedom]'], ...69 [[ repmat (12 \area4. * fsT,3,1)];W * u0h; reshape (phi0 rhs,2 * nD,1); ...70 (OnehalfMat −K) * u0h],[degrees of freedom,1]);71 end72 else73 bvol = accumarray ([elements(:)],[ repmat (12 \area4. * fsT,3,1)],[nC,1]);74 b=[bvol(1:first boundary node−1);RHSdir(1:nBN)+ ...75 bvol(first boundary node:nC);RHSdir(nBN+1: end)];
The final part of solveFEMBEMsymm(Listing 3) solves the (possibly) nonlinear system.For the ease of notation, we define
uℓ =
nC∑
i=1
xki ηi and φℓ =
nD∑
i=1
xki+nC ξi,
where xk is the current Newton approximation.
• (Line 2) If lin=false , the preparations for the Newton method are done.
• (Line 8) The loop for the Newton iteration.
• (Line 10-12) The element wise gradient of the current Newton approximation x (cor-responds to xk in (68)) is computed.
• (Line 13) normgrad contains the norm of the gradient of x on each element.
• (Line 15-18) Some ingredients for Jacobian are declared. rhovec contains the evalu-ations of ρ at each entry of normgrad . AMat(j,i) corresponds to the last term in(66) as well as SysVec corresponds to N(xn).
• (Line 20-22) The array tmp contains the entries of
(N(xn)
0
)+Bxn from (63).
• (Line 24-28) rhoprimevec contains the evaluations of ρ′ at each entry of normgrad .The arrays rhovec2 and area4 are reshaped such that their entries correspond tothe entries of A.
51

• (Line 31) With xk := (xkr1 , xkr2, x
kr3)
T , one can write formally
A2(i:i+3) = ATs xk,=
(∫
Ts
∇ηj(∇uℓ)T dx
)
j=(r1,r2,r3)
Ts ∈ Tℓ. (70)
There holds (r1, r2, r3) = elements(s,:) as well as i = 3(s − 1) + 1. To avoidbuilding up the whole matrix, this product is performed on the level of the entries.
• (Line 32-33) We want to realize
vsisjs =
∫
Ts
∇ηj(∇uℓ)T∇uℓ(∇ηi)T dx 1 ≤ is, js ≤ 3, 1 ≤ s ≤ nE,
cf. (66), where i = elements(s, is) and j = elements(s, js) . Note that theintegrand in (70) is constant, therefore we can put together vikjk with elements fromA2. The arrays A2 and A3 contain two different orders of A2 from Line 31 such thatthere holds formally
A2. * A3 =
∫
Ts
1 dx (. . . , vs11, vs21, v
s31, v
s12, v
s22, v
s32, v
s13, v
s23, v
s33, . . .)
T 1 ≤ s ≤ nE.
• (Line 35) Consequently, we are able to assemble the first part of the Jacobian AMat2which corresponds to the first term of (66).
• (Line 37-38) SysMat2 finally contains the Jacobian (cf. (67)).
• (Line 40-50) We perform the Newton step. Theory predicts the sequence (δk)k≥k0to be monotone for xk0 being sufficiently close to the solution. Thus, we check ifnorm(delta) is at least five orders of magnitude lower than the first Newton residualstored in norm delta first . We stop the iteration if for the first time holds
‖δk−1‖ ≤ 10−5‖δ0‖ and ‖δk‖ > ‖δk−1‖.
• (Line 54-59) In case of a linear problem, we assemble the FEM-Galerkin matrix AMat(cf. (69)) and add it to the existing Galerkin matrix SysMat . The linear system issolved by Matlab’s backslash operator.
Listing 3: Solving with Symmetric Coupling: The Newton Method
1 %%%−−− Computation of (S1/P0) −FEMBEM approximation −−−2 if (lin==false)3 x=xstart;4 norm delta old=1;5 %*** Newton's Method6 fprintf( 'norm of residual: \n' );7 step=1;
52

8 while (1)9 %*** Elementwise gradient of x
10 u21 = repmat ( 2 * (x(elements(:,2)) −x(elements(:,1)))./area4, 1,2);11 u31 = repmat ( 2 * (x(elements(:,3)) −x(elements(:,1)))./area4, 1,2);12 grad = (d31. * u21 − d21. * u31) * [0 −1 ; 1 0];13 normgrad= sqrt ( sum(grad. * grad,2));14 %*** Evaluate the nonlinear part of the Operator (the FEM −part)15 rhovec=rho(normgrad);16 rhovec= reshape ( repmat (rhovec',9,1),9 * nE,1);17 AMat=sparse (rowsA,colsA,rhovec. * A(:));18 SysVec=AMat * x(1:nC);19 %*** Evaluate the linear part of the Operator20 tmp=SysMat * x;21 %*** Finally, adding the two parts...22 tmp=[tmp(1:nC) + SysVec; tmp(nC+1: end )];23 %%%−−−Assembly of the Jacobian −−−24 rhoprimevec=rhoprime(normgrad);25 rhovec2=rhoprimevec./normgrad;26 rhovec2= reshape ( repmat (rhovec2',9,1),9 * nE,1);27 area4new= reshape ( repmat (area4',9,1),9 * nE,1);28 xvec= reshape (x(elements(:,[1 2 3 1 2 3 1 2 3]))',9 * nE,1);29 %*** Compute integral of grad(phi j) * grad(u)' * grad(u) * grad(phi i)'30 A2=(A(:). * xvec);31 A2=sum( reshape (A2,3,3 * nE),1);32 A3=reshape ( repmat (A2,3,1),9 * nE,1);33 A2=reshape ( repmat ( reshape (A2,3,nE),3,1),9 * nE,1);34 %*** Assembly of the difficult part (Jacobian of the nonlinear pa rt)35 AMat2=sparse (rowsA,colsA,4. * rhovec2. * (A3. * A2)./(area4new));36 %*** Adding the easy part (Jacobian of the linear part)37 SysMat2=[AMat+AMat2+SysMat(1:nC,1:nC),SysMat(1:nC,n C+1: end ); ...38 SysMat(nC+1: end,1:nC),SysMat(nC+1: end ,nC+1: end)];39 %*** Perform the famous step...40 delta=SysMat2 \(b−tmp);41 norm delta new=norm(delta);42 if (step==1)43 norm delta first=norm delta new;44 end45 if (norm delta old < norm delta new &&...46 norm delta old <norm delta first * (1e −5) && step >1)47 break ;48 end49 norm delta old=norm delta new;50 x=x+delta;51 fprintf( 'step %d: %d \n' ,step,norm delta old)52 step=step+1;53 end54 else55 AMat=sparse (rowsA,colsA,A(:));56 SysMat=[SysMat(1:nC,1:nC)+AMat,SysMat(1:nC,nC+1: end ); ...57 SysMat(nC+1: end ,1:nC),SysMat(nC+1: end ,nC+1: end )];58 x=SysMat \b;
53

59 end
11.3 Solving with Johnson-Nedelec Coupling
The implementation of the Johnson-Nedelec coupling method in solveFEMBEMJohNedis very similar to solveFEMBEMsymmdiscussed in Section 11.2. Now, we want to solvethe following problem: Find (uℓ, φℓ) ∈ Xℓ × Yℓ such that
a(uℓ, vℓ)− 〈φℓ , vℓ〉Γ = 〈f , vℓ〉Ωint + 〈φ0 , vℓ〉,〈(
12−Kℓ
)uℓ , ψℓ〉Γ + 〈Vℓφℓ , ψℓ〉Γ = 〈
(12−Kℓ
)u0,ℓ , ψℓ〉Γ, (71)
for all (vℓ, ψℓ) ∈ Xℓ × Yℓ. As in the previous section u0,ℓ ∈ S(Tℓ) denotes the nodalinterpolant of u0. Again, the implementation of the form a(·, ·) allows several problems tobe considered.
• Linear Case: The operator A in (59) is the identity. There holds
a(uℓ, vℓ) =
∫
Ωint
∇uℓ · ∇vℓ dx.
• Nonlinear Case: The operator A in (59) is given by A∇u = ρ(|∇u|)∇u, u ∈ H1(Ωint),where ρ : R → R. In view of the application of Newton’s method, we restrict toρ ∈ C1(R). There holds
a(u, v) =
∫
Ωint
ρ(|∇uℓ|)∇uℓ · ∇vℓ dx. (72)
Let (uℓ, φℓ) ∈ Xℓ×Yℓ denote a solution of (71) and (u∗ℓ , φ∗ℓ) ∈ Xℓ×Yℓ be a solution of (37).
In the linear case, Theorem 6.3 and Corollary 6.4 state
‖u∗ℓ − uℓ‖H1(Ωint) + ‖φ∗ℓ − φℓ‖H−1/2(Γ) ≤ C‖u0,ℓ − u0‖H1/2(Γ),
where C > 0 does not depend on Xℓ or Yℓ. In the nonlinear case, no such results areavailable. We rewrite the variational form (71) as
(N(x)
0
)+Bx = F. (73)
As in Section 11.2, the function N is given by
N : Rn+m → R
n, x→ (a(uℓ, ηi))ni=1.
The matrix B ∈ R(n+m)×(n+m) reads
B =
(W −MT
12M−K V
), (74)
54

where
Wi,j = 〈Wℓηj , ηi〉Γ, 1 ≤ i, j ≤ n,MT
i,j = 〈ξj , ηi〉Γ, 1 ≤ i ≤ n, 1 ≤ j ≤ m(1
2M−K)i,j = 〈
(12−Kℓ
)ηj , ξi〉Γ, 1 ≤ i ≤ m, 1 ≤ j ≤ n
Vi,j = 〈Vℓξj , ξi〉Γ, 1 ≤ i, j ≤ m.
And finally, the vector F ∈ Rn+m is given by
Fi =
〈f , ηi〉Ωint + 〈φ0 , ηi〉Γ, 1 ≤ i ≤ n
〈(
12−Kℓ
)u0,ℓ , ξi−n〉Γ, n + 1 ≤ i ≤ n+m
. (75)
Again, we define the Newton method as
xk+1 = xk + δk,
δk := −J (xk)−1
((N(xk)
0
)+Bxk − F
)k ∈ N.
(76)
Now, we want to discuss the small differences to the code of solveFEMBEMsymm.
• (Line 4-18) The discrete integral operators Vℓ and Kℓ are assembled. Note that we donot need to build Wℓ, which is the main advantage of Johnson-Nedelec coupling.
• (Line 21-23) The sparse matrix SysMat is built. The position of the entries can beseen in (74).
1 %%%−−− Assembly of the left hand side −−−2
3 %%% assembly of "1/2" in context with K4 rowsOnehalf= repmat ([first boundary element:degrees of freedom]',2,1);5 colsOnehalf=dirichlet(:);6 Onehalf=0.25 * repmat (lengthBE,2,1);7
8 OnehalfMat= sparse ( repmat ([1:nD]',2,1),dirichlet modified(:),Onehalf);9
10 %%% assembly of K: double layer potential11 rowsK= repmat ([first boundary element:degrees of freedom]',nBN,1);12 colsK= reshape ( repmat ([first boundary node:nC],nD,1),nD * nBN,1);13 K=buildK(coordinates(first boundary node:nC,:),dirichlet modified,1);14
15 %%% assembly of V: single layer potential16 rowsV= repmat ([first boundary element:degrees of freedom]',nD,1);17 colsV= reshape ( repmat ([first boundary element:degrees of freedom],nD,1),nD * nD,1);18 V=buildV(coordinates(first boundary node:nC,:),dirichlet modified,1);19
20 %*** Assembly of the Matrix for the linear part of the operator (th e BEM−part)21 SysMat= sparse ([colsOnehalf; rowsOnehalf; rowsK; rowsV], ...22 [rowsOnehalf; colsOnehalf; colsK; colsV], ...23 [ −2* Onehalf; Onehalf; −K(:); V(:)]);
55

• The right-hand side is built. The array b is organized similar to the vector F in (75).For detailed explanation on the variables compute b and compute bdir , see Sec-tion 11.2.
1 if (compute b)2 if (compute bdir)3 bvol = accumarray ([elements(:)],[ repmat (12 \area4. * fsT,3,1)],[nC,1]);4 bdir= accumarray ([dirichlet(:) −first boundary node+1; ...5 [first boundary element:degrees of freedom]' −first boundary node+1], ...6 [ reshape (phi0 rhs,2 * nD,1);(OnehalfMat −K) * u0h], ...7 [degrees of freedom −first boundary node+1,1]);8 b=[bvol(1:first boundary node−1);bvol(first boundary node:nC)+ ...9 bdir(1:nBN);bdir(nBN+1: end )];
10 varargout 1=bdir;11 else12 b = accumarray ([elements(:);dirichlet(:); ...13 [first boundary element:degrees of freedom]'], ...14 [ repmat (12 \area4. * fsT,3,1); reshape (phi0 rhs,2 * nD,1); ...15 (OnehalfMat −K) * u0h],[degrees of freedom,1]);16 end17 else18 bvol = accumarray ([elements(:)],[ repmat (12 \area4. * fsT,3,1)],[nC,1]);19 b=[bvol(1:first boundary node−1);RHS(1:nBN)+ ...20 bvol(first boundary node:nC);RHS(nBN+1: end )];21 end
11.4 Error Estimators
In this section, we discuss the implementation of the error estimator µℓ from Section 8.2.In view of the steering of our adaptive algorithm, we additionally define the error estimator
ℓ := µℓ + oscℓ,
as well as the local contributions
ℓ(T )2 = ‖(1− ITℓ )uℓ‖2H1(T ) T ∈ Tℓ,ℓ(E)2 = ‖h1/2
ℓ (1− Πℓ)φℓ‖2L2(E) + ‖h1/2ℓ (u0 − u0,ℓ)
′‖2L2(E) E ∈ Eℓ.The computation of µℓ is split into several functions. We start with computeEstVolume(Listing 4).
• The function is called with the arrays coordinates and elements representing theuniformly refined mesh Tℓ. The array father2vol links Tℓ with Tℓ. The (nC+nD)×1-array x denotes the solution w.r.t the uniformly refined mesh. Output of the functionare the two arrays tmu1 and tmu2 which contain
tmu1 =(‖∇((1− ITℓ )uℓ
)‖2L2(Ts)
)
1≤s≤nE,
tmu2 =(‖(1− ITℓ )uℓ‖2L2(Ts)
)1≤s≤nE
,
56

where nE is defined in Line 2 and Ts ∈ Tℓ.
• (Line 5-9) The vectors of the triangle sides of the fine mesh Tℓ are determined. area2contains 2(
∫bTs
1 dx)4nEs=1 , Ts ∈ Tℓ.
• (Line 11) Due to the simple structure of father2vol , we use the array idx instead.Here, idx + j, j = 0, . . . , 3 corresponds to father2vol(:, j + 1) .
• (Line 12-18) We compute ITℓ uℓ. Therefore, we need to know the geometric position of
the nodes Tℓ, see Section 11.1 for details.
• (Line 21-26) We compute ‖(1− ITℓ )uℓ‖2L2(Ts) over each element Ts ∈ Tℓ. Therefore, we
use the fact that((1− ITℓ )uℓ
)∣∣bTs
is an affine function of the form
L(y1, y2) = ay1 + by2 + d.
The coefficients are determined in Line 22-24, and in Line 25 we compute the integral‖(1− ITℓ )uℓ‖2L2( bTs)
analytically. Finally, we sum over the elements to obtain
‖(1− ITℓ )uℓ‖2L2(Ts) =
4∑
i=1
‖(1− ITℓ )uℓ‖2L2( bTsi ),
for all elements Ts ∈ Tℓ. There holds (s1, s2, s3, s4) = father2vol( s, : ) .
• (Line 29-36) The element wise gradient of uℓ and its nodal interpolant ITℓ uℓ is com-puted.
• (Line 39-41) The quantity tmu1 = (‖∇((1− ITℓ )uℓ
)‖2L2(Ts))1≤s≤nE is assembled.
Here, we use that ∇((1− ITℓ )uℓ
)is constant on each element Ts ∈ Tℓ.
Listing 4: Estimate the Error Contributions of the Volume Mesh
1 function [tmu1,tmu2] = computeEstVolume(x,coordinates,elements ,father2vol)2 nE = size (elements,1)/4;3
4 %*** First vertex of elements and corresponding edge vectors5 c1 = coordinates(elements(:,1),:);6 d21 = coordinates(elements(:,2),:) − c1;7 d31 = coordinates(elements(:,3),:) − c1;8 %*** Vector of element volumes 2 * |T |9 area2 = d21(:,1). * d31(:,2) −d21(:,2). * d31(:,1);
10 %*** Compute nodal −interpolation of uh/2 on coarse mesh11 idx = 1:4:4 * nE;12 Ihx= zeros (2,1);13 Ihx(elements(idx+1,1))=x(elements(idx+1,1));14 Ihx(elements(idx+1,2))=(x(elements(idx+1,1))+x(elem ents(idx+2,2)))/2;
57

15 Ihx(elements(idx+2,2))=x(elements(idx+2,2));16 Ihx(elements(idx+2,3))=(x(elements(idx+2,2))+x(elem ents(idx+3,1)))/2;17 Ihx(elements(idx+3,1))=x(elements(idx+3,1));18 Ihx(elements(idx,3))=(x(elements(idx,2))+x(elements (idx+1,1)))/2;19 %*** Compute L2−Norm of (1 −Ih)uh/220 nC=size (coordinates,1);21 diffx=x(1:nC) −Ihx;22 d=diffx(elements(:,3));23 a=diffx(elements(:,2)) −diffx(elements(:,3));24 b=diffx(elements(:,1)) −diffx(elements(:,3));25 l2norm=area2. * (1/12 * (a. * a+a. * b+b. * b)+1/3 * (d. * a+b. * d)+1/2 * (d. * d));26 tmu2= sum( reshape (l2norm,4,nE),1)';27
28 %*** Elementwise gradient of uh/229 u21 = repmat ( (x(elements(:,2)) −x(elements(:,1)))./area2, 1,2);30 u31 = repmat ( (x(elements(:,3)) −x(elements(:,1)))./area2, 1,2);31 grad = (d31. * u21 − d21. * u31) * [0 −1 ; 1 0];32
33 %*** Elementwise gradient of nodal interpolant of uh/234 u21 = repmat ( (Ihx(elements(:,2)) −Ihx(elements(:,1)))./area2, 1,2);35 u31 = repmat ( (Ihx(elements(:,3)) −Ihx(elements(:,1)))./area2, 1,2);36 Ihgrad = (d31. * u21 − d21. * u31) * [0 −1 ; 1 0];37
38 %*** Compute L2−norm of grad[(1 −Ih)uh/2]39 diffgrad = grad −Ihgrad;40 norm2 = sum(diffgrad.ˆ2,2);41 tmu1= 2 * area2(1:4:4 * nE). * sum( reshape (norm2,4,nE),1)'/4;
We proceed with the main function to compute the error estimator computeHH2mu (List-ing 5).
• There are two ways to call the function:
• In case of uniform refinement, we call
[vol1,vol2,boundary,osc]=computeHH2mu(x,coordinates ,elements, ...
father2vol,father2dir,coordinatesold,dirichletold,u 0) .
• In case of adaptive refinement, we additionally need the array dirichlet
[vol1,vol2,boundary,osc]=computeHH2mu(x,coordinates ,elements, ...
father2vol,father2dir,coordinatesold,dirichletold,u 0,dirichlet) .
• The * old input parameters correspond to a coarse mesh (Tℓ, Eℓ). The parameterscoordinates , elements , and optionally dirichlet correspond to a uniformlyrefined mesh (Tℓ, Eℓ). x represents the solution w.r.t the fine mesh. father2vol andfather2dir denote the usual linking arrays. u0 is a function handle for the Dirichletdata u0 from (59).
58

• The output parameters contain the parts of ℓ, i.e.
vol1 = tmu1 ,
vol2 = tmu2 ,
boundary =(‖h1/2
ℓ (1−Πℓ)φℓ‖2L2(Es)
)1≤s≤nD
,
osc =(‖h1/2
ℓ (u0 − u0,ℓ)′‖2L2(Es)
)1≤s≤nD
.
• In case of adaptive refinement (Line 9-17), we compute the data oscillations withrespect to the fine mesh, i.e.
osc =(‖h1/2
ℓ (u0 − u0,ℓ)′‖2L2( bEs1 )
+ ‖h1/2ℓ (u0 − u0,ℓ)
′‖2L2( bEs2 )
)1≤s≤nD
,
where Es1 and Es2 denote the sons of Es (father2dir(s,:) = (s1, s2)).
Listing 5: Compute the Error Estimator
1 function [vol1,vol2,boundary,osc]=computeHH2mu(x,coordinates ,elements, ...2 father2vol,father2dir,coordinatesold,dirichletold,u 0, varargin )3 if ( nargin ==8)4 nC=size (coordinates,1);5 [vol1,vol2]=computeEstVolume(x,coordinates,elements ,father2vol);6 boundary = computeEstSlpMuTilde(coordinatesold,dirichletold, ...7 father2dir,x(nC+1: end ));8 osc = computeOscDirichlet(coordinatesold,dirichletold,u0);9 else
10 dirichlet= varargin 1;11 nC=size (coordinates,1);12 [vol1,vol2]=computeEstVolume(x,coordinates,elements ,father2vol);13 boundary = computeEstSlpMuTilde(coordinatesold,dirichletold, ...14 father2dir,x(nC+1: end ));15 osc fine = computeOscDirichlet(coordinates,dirichlet,u0);16 osc=osc fine(father2dir(:,1))+osc fine(father2dir(:,2));17 end
11.5 Adaptive and Uniform Algorithm
Despite the misleading name, the function adaptiveAlgorithmFEMBEM contains both,the uniform and the adaptive strategy to compute a good approximation (uℓ, φℓ). In viewof post-processing, we perform some extra operations which wouldn’t be mandatory forthe adaptive or the uniform algorithm. Additionally, we do some time measurement withtic and toc , see Section 12 for details. The “pure” adaptive Algorithm reads as follows:INPUT: Initial meshes (T0, E0) for ℓ = 0, adaptivity parameter θ ∈ (0, 1).
59

1. Generate uniformly refined meshes Tℓ, Eℓ.
2. Compute discrete solution (uℓ, φℓ) ∈ Xℓ × Yℓ.
3. Compute refinement indicators ℓ(τ) for all τ ∈ Tℓ ∪ Eℓ.
4. Determine set Mℓ ⊆ Tℓ ∪ Eℓ which satisfies Dorfler marking.
5. Mark triangles T ∈ Tℓ ∩Mℓ and boundary elements E ∈ Eℓ ∩Mℓ for refinement.
6. Generate new meshes (Tℓ+1, Eℓ+1), increase counter ℓ 7→ ℓ+ 1, and go to (1).
OUTPUT: Sequence of error estimators (ℓ)ℓ∈N and discrete solutions (uℓ, φℓ)ℓ∈N.At first, we discuss the ways to call the function (Listing 6).
• The first three parameters singularity , n points on layer , and n layerssteer the hp-quadrature used in Section 11.7.2. phi direct or projected isexplained in Section 11.7.2. The parameter adptrho corresponds to the adap-tivity parameter θ. It also decides which refinement strategy is used, i.e. 0 <θ < 1 for adaptive refinement and 1 + ε ≤ θ for uniform refinement. We performnPreRefinementSteps steps of uniform refinement, before we start the algorithm.There holds lin = 1 if the problem to be computed is linear and lin = 0 if not. Thevariable method contains the chosen solving method, i.e
• method=1 for the use of Symmetric Coupling, cf. Section 11.2
• method=2 for the use of Johnson-Nedelec Coupling, cf. Section 11.3.
Finally, nEmax contains the maximal number of volume elements.
Listing 6: Adaptive and Uniform Algorithm, Part 1
1 function adaptiveAlgorithmFEMBEM(singularity,n points on layer,n layers, ...2 phi0 direct or projected,adptrho,nPreRefinementSteps,lin,method,nE max)
We proceed with the documentation of the Uniform Algorithm (Listing 7).
• (Line 1-5) The variable solveFEMBEM contains the function handle of the chosensolving method.
• (Line 8-10) We load the data of the current example.
• (Line 12-18) We prepare the data and rotate the domain to get a symmetric solution.
• (Line 21-24) Perform the pre-refinement steps.
• (Line 25-42) Declare some system variables, e.g. for post-processing or time measure-ment.
60

• (Line 51-52) We rearrange the arrays coordinates , elements , dirichlet , andustart such that the nodes V of Tℓ with V ∈ Γ are last. The array ustart containsa part of the initial guess x0 of the Newton method. The entries of ustart correspondto the array coordinates , thus we have to sort ustart too.
• (Line 55-57) Save the data structures for post-processing.
• (Line 60-67) Depending on the problem (linear or nonlinear), we call the respectivesolving function.
• (Line 69) Save the computational time for the current step.
• (Line 72) Save the solution x for post-processing.
• (Line 73-86) We compute the error estimator ℓ for the previous mesh, because there
holds Tℓ = Tℓ+1 and Eℓ = Eℓ+1 in case of uniform refinement. Note that we onlycompute the error estimators for numerical experiments.
• (Line 88-90) The stopping criterion. We stop the iteration if the maximal number ofelements is reached.
• (Line 92-93) To compute the error estimators, we need the “old” mesh (Tℓ−1, Eℓ−1).
• (Line 95-96) We uniformly refine the mesh, i.e. we generate (Tℓ+1, Eℓ+1). The time formesh refinement is stored separately. The function refineMesh also prolongates thesolution x to the refined mesh (Tℓ+1, Eℓ+1).
Listing 7: Adaptive and Uniform Algorithm, Part 2
1 if (method==1)2 solveFEMBEM=@solveFEMBEMsymm;3 elseif (method==2)4 solveFEMBEM=@solveFEMBEMJohNed;5 end6
7 %*** load mesh data8 load coordinates.dat9 load elements.dat
10 load dirichlet.dat11 %*** rotate the domain12 theta=pi/2;13 D=[cos(theta), −sin(theta);sin(theta),cos(theta)];14 %*** delete first column (i.e. row numeration)15 coordinates(:,1)=[];16 elements(:,1)=[];17 dirichlet(:,1)=[];18 coordinates=(D * coordinates')';19
61

20 %*** pre −refinement: #nPreRefinementSteps steps of uniform refine ment21 for i=1:nPreRefinementSteps22 [coordinates,elements,dirichlet] = ...23 refineMesh(coordinates,elements,dirichlet);24 end25 nMesh=0;26 %%% adaptive processing routine27 estvol1=[];28 estvol2=[];29 estdir=[];30 estosc=[];31 comptime=[];32 refinetime=[];33 save( 'err est.mat' , 'estvol1' );34 save( 'comptime.mat' , 'comptime' );35 save( 'comptime.mat' , 'refinetime' , ' −append' );36 nC=size (coordinates,1);37 nD=size (dirichlet,1);38 ustart=rand(nC,1);39 phistart=rand(nD,1);40 mark1=0;41 mark2=0;42 systime=0;43 while 144 fprintf([ 'mesh ' ,int2str(nMesh), ': number of elements=' , ...45 int2str( size (elements,1)), ' \n' ]);46 if (adptrho >=1)47 %%%**************************48 %%%**** UNIFORM−REFINEMENT****49 %%%**************************50 tic;51 [coordinates,elements,dirichlet,ustart] = ...52 sortBoundaryNodesLast(coordinates,elements,dirichle t,ustart);53 systime=toc;54 %%% save data structures55 save([ 'mesh ' int2str(nMesh) '.mat' ], 'coordinates' );56 save([ 'mesh ' int2str(nMesh) '.mat' ], 'elements' , ' −append' );57 save([ 'mesh ' int2str(nMesh) '.mat' ], 'dirichlet' , ' −append' );58 tic;59 %%% Compute discrete solution60 if (lin)61 x=solveFEMBEM(coordinates,elements,dirichlet,@f,@u0 ,@grad u0, ...62 singularity,n points on layer,n layers,phi0 direct or projected);63 else64 x=solveFEMBEM(coordinates,elements,dirichlet,@f,@u0 ,@grad u0, ...65 singularity,n points on layer,n layers,phi0 direct or projected, ...66 [ustart;phistart],@rho,@rhoprime);67 end68 systime=systime+toc;69 comptime=[comptime,systime];70 save( 'comptime.mat' , 'comptime' , ' −append' );
62

71 %%% save solution72 save([ 'mesh ' int2str(nMesh) '.mat' ], 'x' , ' −append' );73 if (nMesh >0)74 %%% Compute error estimators for the previous step75 [vol1,vol2,dir,osc]=computeHH2mu(x,coordinates,elem ents, ...76 father2vol,father2dir,coordinatesold,dirichletold,@ u0);77 %*** Save them for post −processing78 estvol1=[estvol1, sum(vol1)];79 estvol2=[estvol2, sum(vol2)];80 estdir=[estdir, sum(dir)];81 estosc=[estosc, sum(osc)];82 save( 'err est.mat' , 'estvol1' , ' −append' );83 save( 'err est.mat' , 'estvol2' , ' −append' );84 save( 'err est.mat' , 'estdir' , ' −append' );85 save( 'err est.mat' , 'estosc' , ' −append' );86 end87 %%%−−− Stopping criterion −−−88 if size (elements,1) >=nEmax89 break ;90 end91 %%%uniform refinement92 coordinatesold=coordinates;93 dirichletold=dirichlet;94 tic;95 [coordinates,elements,dirichlet,father2vol,father2d ir,x] = ...96 refineMesh(coordinates,elements,dirichlet,x);97 refinetime=[refinetime,toc];98 save( 'comptime.mat' , 'refinetime' , ' −append' );99 %%%prepare next step
100 nC=size (coordinates,1);101 nD=size (dirichlet,1);102 ustart=x(1:nC);103 phistart=x(nC+1: end);104 else
Now, we discuss the adaptive algorithm (Listing 8).
• We consider five different meshes: the original mesh (Tℓ, Eℓ), its uniform refinement
(Tℓ, Eℓ), the old mesh (Tℓ−1, Eℓ−1), its uniform refinement (Tℓ−1, Eℓ−1), and the adaptiverefinement of the original mesh (Tℓ+1, Eℓ+1).
• (Line 10-15) In case of a nonlinear problem, we need some data of the mesh
(Tℓ−1, Eℓ−1) as well as its link to (Tℓ−1, Eℓ−1) stored in father2coarse andfather2coarse dir .
• (Line 16-17) We generate the mesh (Tℓ, Eℓ).
• (Line 22-23) Again, we need the boundary nodes to be sorted last.
• (Line 24-31) The initial guess for the Newton method (x fine ) is generated. A
random vector in the first step, and the prolongation of the solution w.r.t. (Tℓ−1, Eℓ−1)
63

to (Tℓ, Eℓ) in the remaining steps, see Section 11.6 for details.
• (Line 32-41) We compute the fine mesh solution (uℓ, φℓ) ∈ Xℓ × Yℓ.
• (Line 45-59) To give a fair comparison of adaptive and uniform strategy, we alsocompute the coarse mesh solution. We use the Dirichlet data from the fine mesh andproject it onto the coarse mesh (cf. Section 11.7.1). Note that this step is not neededfor the adaptive algorithm.
• (Line 61-68) Save the data for post-processing.
• (Line 71-72) We compute ℓ for adaptive mesh refinement.
• (Line 76-84) Again, we save some data for post-processing.
• (Line 86-88) The algorithm is stopped if the maximal number of elements is reached.
• (Line 91) Determine the set Mℓ which satisfies Dorfler marking. The numbers of theelements in Mℓ ∩ Tℓ are stored in mark1 as well as the numbers of the elements inMℓ ∩ Eℓ are stored in mark2 .
• (Line 94-95) We generate the adaptively refined mesh (Tℓ+1, Eℓ+1).
Listing 8: Adaptive and Uniform Algorithm, Part 3
1 else2 %%%***************************3 %%%**** ADAPTIVE−REFINEMENT****4 %%%***************************5 tic;6 nC coarse= size (coordinates,1);7 nD coarse= size (dirichlet,1);8 %%% Compute refinement indicators9 %*** Compute the h/2 solution
10 if (nMesh >0 && not(lin))11 elements coarse=elements fine;12 father2coarse=father2vol;13 father2coarse dir=father2dir;14 nC coarse2= size (coordinates fine,1);15 end16 [coordinates fine,elements fine,dirichlet fine,father2vol,father2dir] = ...17 refineMesh(coordinates,elements,dirichlet);18
19 nC fine= size (coordinates fine,1);20 nD fine= size (dirichlet fine,1);21
22 [coordinates fine,elements fine,dirichlet fine] = ...23 sortBoundaryNodesLast(coordinates fine,elements fine,dirichlet fine);24 if (nMesh >0 && not(lin))
64

25 x fine=prolongate(x fine,elements coarse,elements fine, ...26 father2coarse,father2adpt,father2vol,father2coarse dir, ...27 father2adpt dir,father2dir,nC coarse2,nC fine,nD fine);28 else29 x fine=rand(nC fine+nD fine,1);30 x=rand(nC coarse+nD coarse,1);31 end32 if (lin)33 [x fine,bdir fine]=solveFEMBEM(coordinates fine,elements fine, ...34 dirichlet fine,@f,@u0,@grad u0,singularity,n points on layer, ...35 n layers,phi0 direct or projected);36 else37 [x fine,bdir fine]=solveFEMBEM(coordinates fine,elements fine, ...38 dirichlet fine,@f,@u0,@grad u0,singularity,n points on layer, ...39 n layers,phi0 direct or projected,x fine,@rho, @rhoprime);40 end41
42 systime=systime+toc;43
44 %*** Compute coarse −mesh solution for postprocessing45 [coordinates,elements,dirichlet] = ...46 sortBoundaryNodesLast(coordinates,elements,dirichle t);47
48 bdir coarse=computeRHScoarse(bdir fine,dirichlet fine,dirichlet, ...49 father2dir,nC fine,nC coarse);50
51 if (lin)52 x=solveFEMBEM(coordinates,elements,dirichlet,@f,@u0 ,@grad u0, ...53 singularity,n points on layer,n layers, ...54 phi0 direct or projected,bdir coarse);55 else56 x=solveFEMBEM(coordinates,elements,dirichlet,@f,@u0 ,@grad u0, ...57 singularity,n points on layer,n layers,phi0 direct or projected, ...58 x,@rho, @rhoprime,bdir coarse);59 end60 %%% save data structures61 save([ 'mesh ' int2str(nMesh) '.mat' ], 'coordinates' );62 save([ 'mesh ' int2str(nMesh) '.mat' ], 'elements' , ' −append' );63 save([ 'mesh ' int2str(nMesh) '.mat' ], 'dirichlet' , ' −append' );64 save([ 'mesh ' int2str(nMesh) '.mat' ], 'coordinates fine' , ' −append' );65 save([ 'mesh ' int2str(nMesh) '.mat' ], 'elements fine' , ' −append' );66 save([ 'mesh ' int2str(nMesh) '.mat' ], 'dirichlet fine' , ' −append' );67 save([ 'mesh ' int2str(nMesh) '.mat' ], 'x' , ' −append' );68 save([ 'mesh ' int2str(nMesh) '.mat' ], 'x fine' , ' −append' );69 tic;70 %*** Compute the error estimators71 [vol1,vol2,dir,osc]=computeHH2mu(x fine,coordinates fine,elements fine, ...72 father2vol,father2dir,coordinates,dirichlet,@u0,dir ichlet fine);73 systime=systime+toc;74 comptime=[comptime,systime];75 %*** Save them for post −processing
65

76 estvol1=[estvol1, sum(vol1)];77 estvol2=[estvol2, sum(vol2)];78 estdir=[estdir, sum(dir)];79 estosc=[estosc, sum(osc)];80 save( 'err est.mat' , 'estvol1' , ' −append' );81 save( 'err est.mat' , 'estvol2' , ' −append' );82 save( 'err est.mat' , 'estdir' , ' −append' );83 save( 'err est.mat' , 'estosc' , ' −append' );84 save( 'comptime.mat' , 'comptime' , ' −append' );85 %%%−−− Stopping criterion −−−86 if size (elements,1) >=nEmax87 break ;88 end89 tic;90 %%% Mark elements for refinement91 [mark1,mark2]= markElements(adptrho,vol1+vol2,dir+osc);92
93 %%%Refine marked elements94 [coordinates,elements,dirichlet,father2adpt,father2 adpt dir,x] = ...95 refineMesh(coordinates,elements,dirichlet,mark1,mar k2,x);96 %[coordinates,elements,dirichlet,father2adpt,xadpt] = ...97 % refineMesh(coordinates,elements,dirichlet,mark1,ma rk2,x);98 systime=toc;99 end
11.6 Prolongate the Solution
Theory predicts quadratic convergence of the Newton method only locally. Thus, we tryto determine the initial guess x0 as close to the solution as possible. The main effort inthe adaptive algorithm goes into computing the solution w.r.t. the uniformly refined mesh(Tℓ, Eℓ). One idea is to consider the preceding solution (uℓ−1, φℓ−1) ∈ Xℓ−1 × Yℓ−1 and
find its representation in Xℓ × Yℓ. Therefore, we need some link between the two meshes,which is given by the father2son -arrays as seen in Figure 5. The documentation ofprolongate reads as follows (Listing 9).
• The nC coarse × 3-array elements coarse represents the mesh Tℓ−1 as well asthe nC fine × 3-array elements fine represents Tℓ. x is the solution w.r.t. thecoarse mesh. The father2son -arrays link the two meshes as shown in Figure 5.nD fine denotes the number of boundary elements of the fine mesh Eℓ. The out-put parameter xnew is a (nC fine + nD fine ) × 1-array and contains the pro-longed solution. Note that the function needs the respective arrays to be sorted bysortBoundaryNodesLast to work.
• (Line 5-13) We check the refinement type of the elements in Tℓ−1. The logicalarrays none , bisec1 , bisec12 , bisec13 , and bisec123 mark the elements withthe respective refinement type.
66

Xℓ−1
Xℓ−1
Xℓ
Xℓ
father2adpt
fath
er2
coa
rse
ad
ap
t2fin
e
Yℓ−1
Yℓ−1
Yℓ
Yℓ
father2adpt dir
fath
er2
coa
rsed
ir
ad
ap
t2fin
ed
ir
Figure 5: Illustration of the link between the different meshes used in prolongate .
• (Line 15) The logical array bisecdir marks the boundary elements of Eℓ−1 whichare refined in Eℓ.
• We define (unew, φnew) as
unew =nC fine∑
i=1
xnew(i) ηi and φnew =nC fine +nD fine∑
i=nC fine +1
xnew(i) ξi−nC fine .
• (Line 14-39) We prolongate the solution on the boundary. If the element τ ∈ Eℓ−1
hasn’t been adaptively refined, we know that τ is refined in two elements τ1, τ2 ∈Eℓ−1 ∩ Eℓ. Consequently, we assign the values of x on the elements τ1 and τ2 to xnew.If the element τ ∈ Eℓ−1 has been refined, we obtain the following situation:
τ = τ1 ∪ τ2 τ1, τ2 ∈ Eℓ−1,
τi = τ i1 ∪ τ i2, τ i1, τi2 ∈ Eℓ, i = 1, 2.
Due to the geometric situation, we assign a weighted sum to xnew on the elements τ 12
and τ 21 , i.e.
φnew
∣∣∣τ12
=3
4φℓ−1
∣∣∣τ1
+1
4φℓ−1
∣∣∣τ2,
φnew
∣∣∣τ21
=1
4φℓ−1
∣∣∣τ1
+3
4φℓ−1
∣∣∣τ2.
• (Line 47-58) The values of uℓ on the elements of Tℓ−1 which haven’t been adaptivelyrefined are the same as the values of uℓ−1.
• (Line 59-200) The rest of the code considers the elements which have been adaptively
refined. Any new node V of Tℓ is located on an edge between the nodes V1, V2 of the
67

coarse mesh Tℓ−1, cf. Figure 4. Consequently, we interpolate the values, i.e.
unew(V ) =1
2(uℓ−1(V1) + uℓ−1(V2)) .
• We give an example for an element Ts ∈ Tℓ−1 whose first and second edge is refinedin Tℓ, i.e. bisec12(s) = 1 (cf. Figure 6). We want to generate unew on the element
in Tℓ with the known values of uℓ−1 on the element in Tℓ−1. Therefore, we will discusstwo exemplary situations.
• To generate the value of unew on the blue marked node in Tℓ, we just take the valueof uℓ−1 on the corresponding blue marked node of Tℓ−1. To find the entry in uℓ−1
resp. x , we start with the array father2coarse . As seen in Figure 4 the valueof uℓ−1 of the blue marked node in Tℓ−1 can be obtained by
x(elements coarse(father2coarse(s,1),3)) . (77)
We proceed with the value of unew on the blue marked node in Tℓ.father2adpt(s,1) is the number of the blue marked element in Tℓ andadapt2fine(father2adpt(s,1),2) contains the number of the blue markedelement in Tℓ. Thus, the value in (77) has to be stored in
xnew(elements fine(adapt2fine(father2adpt(s,1),2),2)) ,
cf. Line 92-93 and see also Figure 4 for the position of the nodes.
• To generate the value of unew on the green marked node in Tℓ, we have to interpolatethe values of uℓ−1 on the green marked nodes in Tℓ−1. As before, we navigate tothe green marked nodes in Tℓ−1 with
xnew(elements coarse(father2coarse(s,4),1)) andxnew(elements coarse(father2coarse(s,4),3)) .
father2adpt(s,4) contains the number of the green marked element in Tℓand adapt2fine(father2adpt(s,4),1) contains the number of the greenmarked element in Tℓ. Consequently, we may generate the value of unew on thegreen marked node in Tℓ as follows
xnew(elements fine(adapt2fine(father2adpt(s,4),1),3)) =1
2(xnew(elements coarse(father2coarse(s,4),1))
+xnew(elements coarse(father2coarse(s,4),3)) ) ,
cf. Line 119-121.
Listing 9: Prolongate the Solution
1 function xnew=prolongate(x,elements coarse,elements fine,father2coarse, ...2 father2adpt,adapt2fine,father2coarse dir,father2adpt dir, ...3 adapt2fine dir,nC coarse,nC fine,nD fine)
68

Tℓ−1
Tℓ−1
Tℓ
Tℓ
Figure 6: Example for prolongation.
4 %*** Check refinement type in adaptive refined mesh5 none=(father2adpt(:,1)==father2adpt(:,2)) & (father2a dpt(:,3)==father2adpt(:,4)) ...6 & (father2adpt(:,2)==father2adpt(:,3));7 bisec1=(father2adpt(:,1)==father2adpt(:,2)) & ...8 (father2adpt(:,3)==father2adpt(:,4)) & ∼none;9 bisec12=(father2adpt(:,1)==father2adpt(:,2)) & ...
10 (father2adpt(:,3) ∼= father2adpt(:,4));11 bisec13=(father2adpt(:,1) ∼= father2adpt(:,2)) & ...12 (father2adpt(:,3)==father2adpt(:,4));13 bisec123=not(bisec1 | bisec12 | bisec13 | none);14
15 bisecdir=(father2adpt dir(:,1) ∼= father2adpt dir(:,2));16
17 xnew=zeros (nC fine+nD fine,1);18
19 %%%**************************************************20 %%% prolongate x on dirichlet mesh, i.e x(nC+1:end)21 %%%**************************************************22
23 %*** no adaptive refinement24 xnew(nC fine+adapt2fine dir(father2adpt dir( ∼bisecdir,1),1))= ...25 x(nC coarse+father2coarse dir( ∼bisecdir,1));26 xnew(nC fine+adapt2fine dir(father2adpt dir( ∼bisecdir,1),2))= ...27 x(nC coarse+father2coarse dir( ∼bisecdir,2));
69

28
29 %*** bisection of the boundary elements30 xnew(nC fine+adapt2fine dir(father2adpt dir(bisecdir,1),1))= ...31 x(nC coarse+father2coarse dir(bisecdir,1));32 xnew(nC fine+adapt2fine dir(father2adpt dir(bisecdir,1),2))= ...33 0.25 * (3 * x(nC coarse+father2coarse dir(bisecdir,1)) ...34 +x(nC coarse+father2coarse dir(bisecdir,2)));35 xnew(nC fine+adapt2fine dir(father2adpt dir(bisecdir,2),1))= ...36 0.25 * (x(nC coarse+father2coarse dir(bisecdir,1)) ...37 +3* x(nC coarse+father2coarse dir(bisecdir,2)));38 xnew(nC fine+adapt2fine dir(father2adpt dir(bisecdir,2),2))= ...39 x(nC coarse+father2coarse dir(bisecdir,2));40
41
42 %%%**************************************************43 %%% prolongate x on volume mesh, i.e x(1:nC)44 %%%**************************************************45
46 %*** no adaptive refinement47 xnew(elements fine(adapt2fine(father2adpt(none,1),1),2))= ...48 x(elements coarse(father2coarse(none,1),2));49 xnew(elements fine(adapt2fine(father2adpt(none,1),1),3))= ...50 x(elements coarse(father2coarse(none,1),3));51 xnew(elements fine(adapt2fine(father2adpt(none,1),2),1))= ...52 x(elements coarse(father2coarse(none,2),1));53 xnew(elements fine(adapt2fine(father2adpt(none,1),2),2))= ...54 x(elements coarse(father2coarse(none,2),2));55 xnew(elements fine(adapt2fine(father2adpt(none,1),3),2))= ...56 x(elements coarse(father2coarse(none,3),2));57 xnew(elements fine(adapt2fine(father2adpt(none,1),3),3))= ...58 x(elements coarse(father2coarse(none,3),3));59
60 %*** first edge refined61 xnew(elements fine(adapt2fine(father2adpt(bisec1,1),2),1))= ...62 x(elements coarse(father2coarse(bisec1,1),2));63 xnew(elements fine(adapt2fine(father2adpt(bisec1,1),2),2))= ...64 x(elements coarse(father2coarse(bisec1,1),3));65 xnew(elements fine(adapt2fine(father2adpt(bisec1,1),3),2))= ...66 x(elements coarse(father2coarse(bisec1,2),1));67 xnew(elements fine(adapt2fine(father2adpt(bisec1,1),4),1))= ...68 x(elements coarse(father2coarse(bisec1,4),2));69
70 xnew(elements fine(adapt2fine(father2adpt(bisec1,3),2),1))= ...71 x(elements coarse(father2coarse(bisec1,3),2));72 xnew(elements fine(adapt2fine(father2adpt(bisec1,3),2),2))= ...73 x(elements coarse(father2coarse(bisec1,3),3));74 xnew(elements fine(adapt2fine(father2adpt(bisec1,3),3),2))= ...75 x(elements coarse(father2coarse(bisec1,4),1));76 xnew(elements fine(adapt2fine(father2adpt(bisec1,3),4),1))= ...77 x(elements coarse(father2coarse(bisec1,4),2));78
70

79 xnew(elements fine(adapt2fine(father2adpt(bisec1,1),1),3))= ...80 0.5 * (x(elements coarse(father2coarse(bisec1,1),1)) ...81 +x(elements coarse(father2coarse(bisec1,1),2)));82 xnew(elements fine(adapt2fine(father2adpt(bisec1,1),4),3))= ...83 0.5 * (x(elements coarse(father2coarse(bisec1,2),1)) ...84 +x(elements coarse(father2coarse(bisec1,2),2)));85 xnew(elements fine(adapt2fine(father2adpt(bisec1,3),1),3))= ...86 0.5 * (x(elements coarse(father2coarse(bisec1,3),1)) ...87 +x(elements coarse(father2coarse(bisec1,3),2)));88
89 %*** first and second edge refined90 xnew(elements fine(adapt2fine(father2adpt(bisec12,1),2),1))= ...91 x(elements coarse(father2coarse(bisec12,1),2));92 xnew(elements fine(adapt2fine(father2adpt(bisec12,1),2),2))= ...93 x(elements coarse(father2coarse(bisec12,1),3));94 xnew(elements fine(adapt2fine(father2adpt(bisec12,1),3),2))= ...95 x(elements coarse(father2coarse(bisec12,2),1));96 xnew(elements fine(adapt2fine(father2adpt(bisec12,1),4),1))= ...97 x(elements coarse(father2coarse(bisec12,4),2));98
99 xnew(elements fine(adapt2fine(father2adpt(bisec12,3),3),2))= ...100 x(elements coarse(father2coarse(bisec12,3),2));101 xnew(elements fine(adapt2fine(father2adpt(bisec12,3),4),1))= ...102 x(elements coarse(father2coarse(bisec12,3),3));103
104 xnew(elements fine(adapt2fine(father2adpt(bisec12,1),1),3))= ...105 0.5 * (x(elements coarse(father2coarse(bisec12,1),1)) ...106 +x(elements coarse(father2coarse(bisec12,1),2)));107 xnew(elements fine(adapt2fine(father2adpt(bisec12,1),3),3))= ...108 0.5 * (x(elements coarse(father2coarse(bisec12,2),1)) ...109 +x(elements coarse(father2coarse(bisec12,2),2)));110 xnew(elements fine(adapt2fine(father2adpt(bisec12,3),1),1))= ...111 0.5 * (x(elements coarse(father2coarse(bisec12,3),1)) ...112 +x(elements coarse(father2coarse(bisec12,3),2)));113 xnew(elements fine(adapt2fine(father2adpt(bisec12,3),1),3))= ...114 0.5 * (x(elements coarse(father2coarse(bisec12,3),1)) ...115 +x(elements coarse(father2coarse(bisec12,3),3)));116 xnew(elements fine(adapt2fine(father2adpt(bisec12,3),4),3))= ...117 0.5 * (x(elements coarse(father2coarse(bisec12,3),3)) ...118 +x(elements coarse(father2coarse(bisec12,3),2)));119 xnew(elements fine(adapt2fine(father2adpt(bisec12,4),1),3))= ...120 0.5 * (x(elements coarse(father2coarse(bisec12,4),3)) ...121 +x(elements coarse(father2coarse(bisec12,4),1)));122
123 %*** first and third edge refined124 xnew(elements fine(adapt2fine(father2adpt(bisec13,1),3),2))= ...125 x(elements coarse(father2coarse(bisec13,1),2));126 xnew(elements fine(adapt2fine(father2adpt(bisec13,1),1),2))= ...127 x(elements coarse(father2coarse(bisec13,1),3));128 xnew(elements fine(adapt2fine(father2adpt(bisec13,1),2),1))= ...129 x(elements coarse(father2coarse(bisec13,2),2));
71

130
131 xnew(elements fine(adapt2fine(father2adpt(bisec13,2),2),1))= ...132 x(elements coarse(father2coarse(bisec13,2),1));133
134 xnew(elements fine(adapt2fine(father2adpt(bisec13,3),2),1))= ...135 x(elements coarse(father2coarse(bisec13,3),2));136 xnew(elements fine(adapt2fine(father2adpt(bisec13,3),2),2))= ...137 x(elements coarse(father2coarse(bisec13,3),3));138
139 xnew(elements fine(adapt2fine(father2adpt(bisec13,1),1),1))= ...140 0.5 * (x(elements coarse(father2coarse(bisec13,1),1)) ...141 +x(elements coarse(father2coarse(bisec13,1),2)));142 xnew(elements fine(adapt2fine(father2adpt(bisec13,2),1),1))= ...143 0.5 * (x(elements coarse(father2coarse(bisec13,2),1)) ...144 +x(elements coarse(father2coarse(bisec13,2),2)));145 xnew(elements fine(adapt2fine(father2adpt(bisec13,3),1),3))= ...146 0.5 * (x(elements coarse(father2coarse(bisec13,3),1)) ...147 +x(elements coarse(father2coarse(bisec13,3),2)));148 xnew(elements fine(adapt2fine(father2adpt(bisec13,1),4),3))= ...149 0.5 * (x(elements coarse(father2coarse(bisec13,1),3)) ...150 +x(elements coarse(father2coarse(bisec13,1),2)));151 xnew(elements fine(adapt2fine(father2adpt(bisec13,1),1),3))= ...152 0.5 * (x(elements coarse(father2coarse(bisec13,1),1)) ...153 +x(elements coarse(father2coarse(bisec13,1),3)));154 xnew(elements fine(adapt2fine(father2adpt(bisec13,2),1),3))= ...155 0.5 * (x(elements coarse(father2coarse(bisec13,2),1)) ...156 +x(elements coarse(father2coarse(bisec13,2),3)));157
158 %*** all edges refined159 xnew(elements fine(adapt2fine(father2adpt(bisec123,1),3),2))= ...160 x(elements coarse(father2coarse(bisec123,1),2));161 xnew(elements fine(adapt2fine(father2adpt(bisec123,1),1),2))= ...162 x(elements coarse(father2coarse(bisec123,1),3));163 xnew(elements fine(adapt2fine(father2adpt(bisec123,1),2),1))= ...164 x(elements coarse(father2coarse(bisec123,2),2));165
166 xnew(elements fine(adapt2fine(father2adpt(bisec123,2),2),1))= ...167 x(elements coarse(father2coarse(bisec123,2),1));168
169 xnew(elements fine(adapt2fine(father2adpt(bisec123,3),3),2))= ...170 x(elements coarse(father2coarse(bisec123,3),2));171 xnew(elements fine(adapt2fine(father2adpt(bisec123,3),4),1))= ...172 x(elements coarse(father2coarse(bisec123,3),3));173
174 xnew(elements fine(adapt2fine(father2adpt(bisec123,1),1),1))= ...175 0.5 * (x(elements coarse(father2coarse(bisec123,1),1)) ...176 +x(elements coarse(father2coarse(bisec123,1),2)));177 xnew(elements fine(adapt2fine(father2adpt(bisec123,2),1),1))= ...178 0.5 * (x(elements coarse(father2coarse(bisec123,2),1)) ...179 +x(elements coarse(father2coarse(bisec123,2),2)));180 xnew(elements fine(adapt2fine(father2adpt(bisec123,1),4),3))= ...
72

181 0.5 * (x(elements coarse(father2coarse(bisec123,1),3)) ...182 +x(elements coarse(father2coarse(bisec123,1),2)));183 xnew(elements fine(adapt2fine(father2adpt(bisec123,1),1),3))= ...184 0.5 * (x(elements coarse(father2coarse(bisec123,1),1)) ...185 +x(elements coarse(father2coarse(bisec123,1),3)));186 xnew(elements fine(adapt2fine(father2adpt(bisec123,2),1),3))= ...187 0.5 * (x(elements coarse(father2coarse(bisec123,2),1)) ...188 +x(elements coarse(father2coarse(bisec123,2),3)));189 xnew(elements fine(adapt2fine(father2adpt(bisec123,3),1),3))= ...190 0.5 * (x(elements coarse(father2coarse(bisec123,3),1)) ...191 +x(elements coarse(father2coarse(bisec123,3),3)));192 xnew(elements fine(adapt2fine(father2adpt(bisec123,3),1),1))= ...193 0.5 * (x(elements coarse(father2coarse(bisec123,3),1)) ...194 +x(elements coarse(father2coarse(bisec123,3),2)));195 xnew(elements fine(adapt2fine(father2adpt(bisec123,3),4),3))= ...196 0.5 * (x(elements coarse(father2coarse(bisec123,3),2)) ...197 +x(elements coarse(father2coarse(bisec123,3),3)));198 xnew(elements fine(adapt2fine(father2adpt(bisec123,4),1),3))= ...199 0.5 * (x(elements coarse(father2coarse(bisec123,4),3)) ...200 +x(elements coarse(father2coarse(bisec123,4),1)));
11.7 Auxiliary Functions
11.7.1 computeRHScoarse
This function is used to compute the right hand side of the Symmetric Coupling Methodon a coarse mesh, but with the discrete integral operators computed on a uniformly refinedmesh. We use it in Section 11.5. The documentation reads as follows (Listing 10).
• The function is called with the array dirichlet representing the coarse mesh Eℓ,the array dirichlet fine representing the uniformly refined mesh Eℓ, the numberof the nodes of the respective meshes Tℓ, Tℓ, and the Dirichlet part of the fine-meshright hand side b fine . To obtain b fine , use the function solveFEMBEMsymm(Section 11.2).
• (Line 5-11) We determine the number of the first node V of Tℓ or Tℓ with V ∈ Γ. Thisinformation is stored in fBN coarse and fBN fine .
• (Line 13-15) We build the index field coarse2fine . With k=coarse2fine(j) ,
there holds that the j-th boundary node of Tℓ has the number k in Tℓ.
• (Line 19) Assume that the boundary element Es of the coarse mesh Eℓ has the end-
points V1 and V2. We know that Vm := 12(V1 + V2) is a node in Tℓ. The index field
dirichlet2midpoint contains this information, i.e.
m=dirichlet2midpoint(s) ,
where m is the number of the node Vm and s is the number of the element Es.
73

• (Line 23-26) For a node Vk of the fine mesh Tℓ exist unique elements Ei, Ej with
Vk = Ei ∩Ej Ei, Ej ∈ Eℓ.
Consequently, we build the index field node2dirichlet as[i,j]=node2dirichlet(k) .
• (Line 29-33) With the index fields defined above, one can represent a test functionηi ∈ S1(Tℓ) as follows
ηi|Γ = ηk|Γ +1
2ηm|Γ +
1
2ηn|Γ ηk, ηm, ηn ∈ S1(Tℓ),
where k=coarse2fine(i) and [m,n]=dirichlet2midpoint(node2dirichlet(i)) .A test function ξj ∈ P0(Eℓ) can be represented as
ξj = ξp + ξq ξp, ξq ∈ P0(Eℓ),
where [p,q]=node2dirichlet(dirichlet2midpoint(i)) .
Listing 10: computeRHScoarse1 function b coarse=computeRHScoarse(b fine,dirichlet fine,dirichlet, ...2 father2dir,nC fine,nC coarse)3 %*** build index field k = coarse2fine (j) such that j −th node of coarse4 %*** mesh coincides with k −th nodes of fine mesh5 boundary nodes= unique (dirichlet);6 nBN coarse= length (boundary nodes);7 fBN coarse=nC coarse −nBN coarse+1;8
9 boundary nodes= unique (dirichlet fine);10 nBN fine= length (boundary nodes);11 fBN fine=nC fine −nBN fine+1;12
13 coarse2fine = zeros (nBN coarse,1);14 coarse2fine(dirichlet −fBN coarse+1) = [ dirichlet fine(father2dir(:,1),1) ...15 dirichlet fine(father2dir(:,2),2) ] −fBN fine+1;16
17 %*** build index field k = element2midpoint(j) such that midpoin t of j −th18 %*** element of coarse mesh is k −th node of fine mesh19 dirichlet2midpoint = dirichlet fine(father2dir(:,1),2) −fBN fine+1;20
21 %*** build index field [i,j] = node2element(k) such that22 %*** intersection(Ei,Ej) = zk23 nD = size (dirichlet,1);24 node2dirichlet = zeros (nBN coarse,2);25 node2dirichlet(dirichlet(:,1) −fBN coarse+1,2) = (1:nD )';26 node2dirichlet(dirichlet(:,2) −fBN coarse+1,1) = (1:nD )';27
74

28 %*** obtain coarse −mesh RHS from fine −mesh RHS29 b coarse= zeros (nBN coarse+nD ,1);30 b coarse(1:nBN coarse) = b fine(coarse2fine) + ...31 0.5 * sum(b fine(dirichlet2midpoint(node2dirichlet)),2);32 b coarse(nBN coarse+1: end)=(b fine(nBN fine+father2dir(:,1))+ ...33 b fine(nBN fine+father2dir(:,2)));
11.7.2 Compute 〈φ0 , ηi〉ΓThere are two strategies to compute the quantity 〈φ0 , ηi〉Γ. The first idea is to com-pute the integral
∫Γφ0(y) ηi|Γ (y) dΓ(y) directly with some quadrature rule. The function
computePhi0Rhs follows this approach. The function is called with
phi0 rhs=computePhi0Rhs(coordinates,dirichlet, ...gradient u0,singularity,n points on layer,n layers)
The arrays coordinates and dirichlet represent the boundary mesh Eℓ.gradient u0 is a function handle for the function φ0 from (59). The variablessingularity , n points on layer , and n layers steer the quadrature rule. Theoutput of the function is the nD× 1-array phi0 rhs which contains
phi0 rhs(i) = 〈φo , ηi+firstBoundaryNode 〉Γ.
Another idea is to replace φ0 by its L2-orthogonal projection on P0(Eℓ), as implementedin the function computeProjPhi0 . The function is called with
proj phi0=computeProjPhi0(coordinates,dirichlet, ...gradient u0,singularity,n points on layer,n layers)
Again, the arrays coordinates and dirichlet represent the boundary mesh Eℓ.gradient u0 is a function handle for the function φ0 from (59). The variablessingularity , n points on layer , and n layers steer the quadrature rule. Theoutput of the function is the nD× 1-array proj phi0 which contains
proj phi0(s) = length(Es)−1〈φ0 , 1〉Es.
Consequently, we approximate
〈φ0 , ηi〉 ≈1
2(length(En)proj phi0(n) + length(Em)proj phi0(m) ),
where En, Em ∈ Eℓ with En ∪Em = supp(ηi) ∩ Γ.If we follow the second idea, we have to consider a different data oscillation term in Sec-tion 11.4. Thus, for numerical experiments, we prefer the function computePhi0Rhs .
75

11.7.3 Sorting Nodes
In view of solving the linear systems which arise in Section 11.2 and 11.3, we want to studythe structure of the corresponding matrices. In both cases, one has to solve
J (xk)z = f z, f ∈ Rn+m,
to obtain the vector J (xk)−1f . Here, f denotes the respective right-hand sides in (68)
and (76). The matrix J (xk) has the form
J (x) =
(J(x) 0
0 0
)+B ∈ R
(n+m)×(n+m).
J(x) is the FEM-Galerkin sparse matrix with small bandwidth. Thus, Matlab’sbackslash-operator should not have any problems. However, B is a dense matrix. Toovercome this problem, we sort the nodes V of the mesh Tℓ which are located on theboundary, i.e. V ∈ Γ, last. There holds, ηi|Γ = 0 for any node Vi /∈ Γ, therefore B has thefollowing structure:
B =
(0 0
0 B
), (78)
where B ∈ R2m×2m (see the definition of B in (64) and (74)). Note that there holds
approximately m ≈ √n, thus 2m× 2m≪ (m+ n)× (m+n). The main advantage is thatthe structure of B in (78) is optimal for fill-in, i.e. the LU-decomposition maintains thestructure of B.Namely, we want to reach the following numbering of the nodes.
• The nodes V with V ∈ Ωint \ Γ are denoted by
V1, . . . , VfirstBoundaryNode −1.
• The nodes V with V ∈ G are denoted by
VfirstBoundaryNode , . . . , VnC.
There holds, firstBoundaryNode=nC −nBN+1. We proceed with the documentationof sortBoundaryNodesLast (Listing 11).
• There are two ways to call the function
• [coordinates,elements,dirichlet]= ...
sortBoundaryNodesLast(coordinates,elements,dirichle t)
• [coordinates,elements,dirichlet,u sorted]= ...
sortBoundaryNodesLast(coordinates,elements,dirichle t,u)
76

The arrays coordinates , elements , and dirichlet represent the mesh (Tℓ, Eℓ).The optional nC×1-array u contains the first nC entries of the array x . Because theseentries correspond to the nodes, we have to sort them to. (e.g. used to generate theinitial guess for the Newton iteration, see Section 11.5)
• (Line 4-6) We determine the number of boundary nodes nBN. The arrayboundary nodes contains the numbers of all nodes V with V ∈ Γ.
• (Line 9-10) We determine the nodes which are located on Γ and provide the indexfield coordinates2newcoordinates to link the old with the new numbers of thenodes.
• (Line 13) The array coordinates is reordered.
• (Line 15-18) If the parameter u is given, we reorder it, too.
• (Line 20-21) The arrays elements and dirichlet refer to the nodes, thus we haveto update the numbers.
Listing 11: Sorting Nodes
1 function [coordinates,elements,dirichlet, varargout ]= ...2 sortBoundaryNodesLast(coordinates,elements,dirichle t, varargin )3 %%% mesh quantities4 nC=size (coordinates,1);5 boundary nodes= unique (dirichlet);6 nBN=length (boundary nodes);7
8 %%% renumeration of nodes9 ind=[ setdiff ([1:nC],boundary nodes)';boundary nodes];
10 coordinates2newCoordinates(ind)=[[1:(nC −nBN)] [(nC −nBN+1):nC]];11
12 %%% reorder coordinates13 coordinates=coordinates(ind,:);14 %%% reorder coordinates from a prolonged solution xold15 if ( nargin ==4)16 u=varargin 1;17 varargout 1=u(ind);18 end19 %%% assign the new node numbers to elements and dirichlet20 elements=coordinates2newCoordinates(elements);21 dirichlet=coordinates2newCoordinates(dirichlet);
77

−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Figure 7: L-shaped (left) and Z-shaped domain (right) and initial triangulations T0 for thenumerical experiments.
12 Numerical Experiments
In this section, we present three numerical examples from [6] to demonstrate the perfor-mance of symmetric FEM-BEM coupling. Recall the definition of (uℓ, φℓ), (u, φ), (u∗ℓ , φ
∗ℓ),
as well as oscℓ and u0,ℓ from Section 8.2. In all experiments, we prescribe the exact solution(uint, uext) of the transmission problem (59), and the data (u0, φ0, f) are computed thereof.The error is measured in the energy norm
|||(u, φ)||| := ‖u‖H1(Ωint) + 〈φ, V φ〉Γ for all (u, φ) ∈ H1(Ωint)×H−1/2(Γ),
which is an equivalent norm on the product space H1(Ωint) ×H−1/2(Γ). This is a simpleconsequence of the continuity and ellipticity of V . Note that the contribution 〈φ−φℓ , V (φ−φℓ)〉Γ to the error |||(ui − uℓ, φ − φℓ)||| can hardly be computed analytically. However,according to Proposition 8.7 and the quasi optimality result in Theorem 7.10, there holds
|||(u− uℓ, φ− φℓ)||| . |||(u− u⋆ℓ , φ− φ⋆ℓ)|||+ oscℓ
. ‖u− uℓ‖H1(Ωint) + minψℓ∈P0(Eℓ)
〈φ− ψℓ , V (φ− ψℓ)〉Γ + oscℓ.
In all experiments, the exterior normal derivative has additional regularity φ ∈ L2(Γ). Wemay therefore use an approximation result from [5, Theorem 4.1, Lemma 4.3] to obtain
minψℓ∈P0(Eℓ)
〈φ− ψℓ , V (φ− ψℓ)〉Γ ≤ 〈(1−Πℓ)φ, V (1−Πℓ)φ〉Γ
. ‖h1/2ℓ (1−Πℓ)φ‖L2(Γ) ≤ ‖h1/2
ℓ (φ− φℓ)‖L2(Γ)
with Πℓ : L2(Γ)→ P0(Tℓ) being the L2-orthogonal projection. Altogether, we see that
|||(u− uℓ, φ− φℓ)||| . ‖u− uℓ‖H1(Ωint) + ‖h1/2ℓ (φ− φℓ)‖L2(Γ) + oscℓ
=: errℓ(u) + errℓ(φ) + oscℓ(79)
78

provides a computable upper bound for the energy error. In the same spirit, the errorestimator µℓ is split into
µ2ℓ =
∑
T∈Tℓ
µℓ(T )2 +∑
E∈Eℓ
µℓ(E)2 =: µℓ(u)2 + µℓ(φ)2. (80)
Recall that Theorem 8.8 predicts
µℓ(u) + µℓ(φ) + oscℓ . ‖u− uℓ‖H1(Ωint) + ‖φ− φℓ‖H−1/2(Γ) + oscℓ . µℓ(u) + µℓ(φ) + oscℓ,
whence
µℓ(u) + µℓ(φ) + oscℓ . |||(u− uℓ, φ− φℓ)|||+ oscℓ . µℓ(u) + µℓ(φ) + oscℓ,
where the upper bound holds under the saturation assumption (58).In the following, we plot the five quantities errℓ(u), errℓ(φ), µℓ(u), µℓ(φ), and oscℓ from (79)–(80) over the number N = #Tℓ of triangles, where both axes are scaled logarithmically.
We consider uniform mesh-refinement Tℓ = T (unif)ℓ with T (unif)
ℓ := Tℓ−1, as well as adaptivemesh-refinement, where the meshes a generated with adaptiveAlgorithmFEMBEM fromSection 11.5, with the adaptivity parameter θ = 0.25. Note that a decay with slope −αindicates some dependence Ω(N−α). For uniform meshes with mesh-size h, this correspondsto Ω(h2α). We stress that, by theory, an overall slope of α = 1/2 is thus optimal with P1-finite elements.For the adaptive mesh-refinement, recall that all integral operators have to be computedwith respect to the fine mesh Tℓ. Therefore, one usually takes the improved approximationu0,ℓ ∈ S1(Tℓ|Γ) instead of u0,ℓ ∈ S1(Tℓ|Γ). Consequently, we then consider oscℓ = ‖h1/2
ℓ (u0−u0,ℓ)
′‖L2(Γ) instead of oscℓ. Moreover, although uℓ is not needed by the adaptive algorithmin Section 11.5, we nevertheless plot errℓ to give a fair comparison of uniform and adaptivemesh-refinement.Besides the experimental convergence rates, we plot errℓ(u), errℓ(φ), µℓ(u), µℓ(φ), and oscℓ(resp. oscℓ) over the computational time tℓ.
• For uniform mesh-refinement, tℓ = t(unif)ℓ is the time needed for ℓ uniform refinements
of the initial mesh T0 to obtain Tℓ, plus the time for building and solving the Galerkinsystem with respect to Xℓ × Yℓ.
For adaptive mesh, refinement, the mesh Tℓ depends on the entire history of precedingmeshes (and solutions). Therefore, the computational time has to be defined differently,
where t(adap)−1 := 0.
• For adaptive mesh-refinement, tℓ = t(adap)ℓ is the sum of the time t
(adap)ℓ−1 elapsed in
prior steps of the adaptive algorithm, plus the time for generating the fine mesh Tℓ,building and solving the Galerkin system with respect to Xℓ × Yℓ, computing thelocal contributions of the data oscillations oscℓ and the error estimator µℓ, elementmarking, and local refinement of Tℓ to generate Tℓ+1.
79

103
104
105
106
107
10−4
10−3
10−2
10−1
err
or,
ℓ
number N of elements
errℓ(u)errℓ(φ)µℓ(u)µℓ(φ)oscℓ
Ω(N −
1/3)
103
104
105
106
10−5
10−4
10−3
10−2
10−1
err
or,
ℓ
number N of elements
errℓ(u)errℓ(φ)µℓ(u)µℓ(φ)oscℓ
Ω(N −
1/2)
Ω(N−
3/4)
Figure 8: Estimators errℓ(u), errℓ(φ), µℓ(u) and µℓ(φ) from (79)–(80) as well as dataoscillations oscℓ in linear Experiment 12.1, plotted over the number N = #Tℓ of trianglesfor uniform (left) and adaptive mesh-refinement (right).
Although this definition seems to favour uniform mesh-refinement, we think that it providesa fair comparison between uniform and adaptive mesh-refinement.All experiments are conducted by use of Matlab (Release 2009b) running on a com-mon 64 Bit Linux system with 32 GB of RAM. Throughout, the occuring linear sys-tems are solved by use of the Matlab backslash operator. For the computation ofthe boundary integral operators, we use the Matlab BEM library HILBERT, cf. [1]; seehttp://www.asc.tuwien.ac.at/abem/hilbert/
12.1 Linear Problem on L-Shaped Domain
We consider the L-shaped domain visualized in Figure 7. With A : L2(Ω)2 → L2(Ω)2 beingthe identity, we prescribe the exact solution of (59) as
uint(x, y) = r2/3 sin(23ϕ) in Ωint,
uext(x, y) = log((x+ 1/8)2 + (y + 1/8)2
)1/2in Ωext,
(81)
where (r, ϕ) are the polar coordinates of (x, y) ∈ R2 with respect to (0, 0). Clearly, the
identity satisfies the assumptions of our model problem, and the FEM-BEM coupling (61)is linear. Recall that (u, φ) denotes the exact solution of (61) and note that u = uint has ageneric singularity at the reentrant corner, whereas φ = ∇uext · n is piecewise smooth.In Figure 8, we plot the convergence of the error quantities from (79)–(80). Since theinterior solution has a generic singularity at the reentrant corner, uniform mesh-refinementleads to a suboptimal order of convergence α = 1/3, i.e. we observe Ω(h2/3). For errℓ(u)
80

102
103
104
105
106
107
108
10−4
10−3
10−2
10−1
100
err
or,
ℓ
number N of elements
errℓℓ
errℓ, adaptiveℓ, adaptive
10−1
100
101
102
103
104
10−4
10−3
10−2
10−1
100
err
or,
ℓ
computational time [sec]
errℓ
ℓ
errℓ, adaptiveℓ, adaptive
Figure 9: Comparison of uniform and adaptive mesh-refining in linear Experiment 12.1,where the error bound errℓ and the estimator ℓ from (82) are plotted over the numberN = #Tℓ of triangles (left) and over the computational time (right).
and µℓ(u), this asymptotics is observed already on coarse meshes. For errℓ(φ) and µℓ(φ), apreasymptotic phase occurs. For adaptive mesh-refinement, we observe the optimal orderof convergence α = 1/2 for errℓ(u) and µℓ(u). Moreover, the terms errℓ(φ) and µℓ(φ) evenconverge with order α = 3/2 which is optimal for the approximation of a smooth functionby piecewise constants with respect to the H−1/2(Γ)-norm.Figure 9 provides comparisons between uniform and adaptive mesh-refinement. We plot
errℓ :=(errℓ(u)
2 + errℓ(φ)2 + osc2ℓ
)1/2and ℓ =
(µℓ(u)
2 + µℓ(φ)2 + osc2ℓ
)1/2(82)
over the number N = #Tℓ of elements as well as over the computational time.
12.2 Nonlinear Problem on L-Shaped Domain
We consider the L-shaped domain visualized in Figure 7. We define
ρ(t) = 2 +1
1 + tfor t > 0 (83)
and note that the derivative satisfies −1 ≤ ρ′(t) < 0. The nonlinear operator A is thendefined by
A(x) = ρ(|x|) x for x ∈ R2. (84)
We stress that A is strongly monotone and Lipschitz continuous on L2(Ω)2. We prescribethe same solution (81) as for the linear experiment from the previous section. The volume
81

103
104
105
106
10−4
10−3
10−2
10−1
err
or,
ℓ
number N of elements
errℓ(u)errℓ(φ)µℓ(u)µℓ(φ)oscℓ
Ω(N −
1/3)
103
104
105
10−5
10−4
10−3
10−2
10−1
err
or,
ℓ
number N of elements
errℓ(u)errℓ(φ)µℓ(u)µℓ(φ)oscℓ
Ω(N −
1/2)
Ω(N−
3/4)
Figure 10: Estimators errℓ(u), errℓ(φ), µℓ(u) and µℓ(φ) from (79)–(80) as well as dataoscillations oscℓ in nonlinear Experiment 12.2 on the L-shaped domain, plotted over thenumber N = #Tℓ of triangles for uniform (left) and adaptive mesh-refinement (right).
force f then reads
f(x, y) := − 4
27r−5/3 sin(2
3ϕ)
(1 + 23r−1/3)2
,
where (r, ϕ) are the polar coordinates of (x, y) ∈ R2 with respect to (0, 0).
Figure 10 and 11 provide the experimental convergence results. The observations arethe same as for the linear experiment in Section 12.1. Figure 12 shows some adaptivelygenerated meshes. We observe a strong mesh-refinement towards the reentrant corner,where uint is singular.
12.3 Nonlinear Problem on Z-Shaped Domain
In the final example, Ωint is the Z-shaped domain, shown in Figure 7. The exact solutionreads
uint(x, y) = r4/7 sin(47ϕ) in Ωint,
uext(x, y) = log((x+ 1/8)2 + (y + 1/8)2
)1/2in Ωext,
(85)
with (r, ϕ) being the polar coordinates of (x, y) ∈ R2. Again, uint has a generic singularity
at the reentrant corner. With the nonlinear operator A from Section 12.2, the right-handside f becomes
−div(ρ(|∇uint|)∇uint) = f,
82

102
103
104
105
106
107
10−4
10−3
10−2
10−1
100
err
or,
ℓ
number N of elements
errℓℓ
errℓ, adaptiveℓ, adaptive
10−1
100
101
102
103
104
10−4
10−3
10−2
10−1
100
err
or,
ℓ
computational time [sec]
errℓ
ℓ
errℓ, adaptiveℓ, adaptive
Figure 11: Comparison of uniform and adaptive mesh-refining in nonlinear Experiment 12.2on the L-shaped domain, where the error bound errℓ and the estimator ℓ from (82) areplotted over the number N = #Tℓ of triangles (left) and over the computational time(right).
where
f(r, ϕ) := − 48
343r−13/7 sin(4
7ϕ)
(1 + 47r−3/7)2
.
Figure 13 and 14 provide the experimental convergence results. As before, the observationsare the same as for the linear experiment in Section 12.1. Figure 15 shows some adaptivelygenerated meshes which show a strong mesh-refinement towards the reentrant corner.
83

−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T0 = 192
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T4 = 204
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T8 = 301
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T12 = 629
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T16 = 1743
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T20 = 5401
Figure 12: Adaptively generated meshes Tℓ in nonlinear Experiment 12.2 on the L-shapeddomain.
84

103
104
105
106
10−4
10−3
10−2
10−1
err
or,
ℓ
number N of elements
errℓ(u)errℓ(φ)µℓ(u)µℓ(φ)oscℓ
Ω(N −2/7)
103
104
105
10−5
10−4
10−3
10−2
10−1
err
or,
ℓ
number N of elements
errℓ(u)errℓ(φ)µℓ(u)µℓ(φ)oscℓ
Ω(N−
3/4)
Ω(N −
1/2)
Figure 13: Estimators errℓ(u), errℓ(φ), µℓ(u) and µℓ(φ) from (79)–(80) as well as dataoscillations oscℓ in nonlinear Experiment 12.3 on the Z-shaped domain, plotted over thenumber N = #Tℓ of triangles for uniform (left) and adaptive mesh-refinement (right).
102
103
104
105
106
107
10−3
10−2
10−1
100
err
or,
ℓ
number N of elements
errℓℓ
errℓ, adaptiveℓ, adaptive
10−1
100
101
102
103
104
10−3
10−2
10−1
100
err
or,
ℓ
computational time [sec]
errℓℓ
errℓ, adaptiveℓ, adaptive
Figure 14: Comparison of uniform and adaptive mesh-refining in nonlinear Experiment 12.3on the Z-shaped domain, where the error bound errℓ and the estimator ℓ from (82) areplotted over the number N = #Tℓ of triangles (left) and over the computational time(right).
85

−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T0 = 224
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T4 = 267
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T8 = 418
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T12 = 1120
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T16 = 3589
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25#T20 = 12086
Figure 15: Adaptively generated meshes Tℓ in nonlinear Experiment 12.3 on the Z-shapeddomain.
86

References
[1] M. Aurada, M. Ebner, S. Ferraz-Leite, M. Mayr, P. Goldenits, M.
Karkulik, D. Praetorius: HILBERT — A Matlab implementation of adap-tive BEM, ASC Report 44/2009, Institute for Analysis and Scientific Com-puting, Vienna University of Technology, Wien, 2009, software download athttp://www.asc.tuwien.ac.at/abem/hilbert/
[2] M. Aurada, M. Feischl, D. Praetorius: Convergence of some adaptive FEM-BEM coupling, ASC Report 06/2010, Institute for Analysis and Scientific Com-puting, Vienna University of Technology, Wien, 2010, ISBN 978-3-902627-03-2.
[3] J. Bielak, R.C. MacCamy: An exterior interface problem in two-dimensionalelastodynamics, Quart. Appl. Math. 41, 143-159 (1983).
[4] C. Carstensen: A posteriori error estimate for the symmetric coupling of finiteelements and boundary elements. Computing 57 (1996), no. 4, 301–322. (Reviewer:J. T. Oden)
[5] C. Carstensen, D. Praetorius: Averaging techniques for the effective numer-ical solution of Symm’s integral equation of the first kind, SIAM J. Sci. Comput.27 (2006), 1226–1260.
[6] C. Carstensen, E. Stephan: Adaptive coupling of boundary elements andfinite elements, Math. Model. Numer. Anal. 29 (1995), 779a817.
[7] P. Clement: Approximation by finite element functions using local regulariza-tion, Rairo, Ser. Rouge Anal. Numer., R-2, pp. 77-84 (1975).
[8] M. Costabel: A symmetric method for the coupling of finite elements andboundary elements, The Mathematics of Finite Elements and Applications IV,MAFELAP 1987 (Edited by J.R. Whiteman),Academic Press, London, pp. 281-288 (1988).
[9] J. Johnson, J.C. Nedelec: On the coupling of boundary integral and finiteelement methods, Math. Comp. 35, 1063-1079 (1980).
[10] W. McLean: Strongly elliptic systems and boundary integral equations, Cam-bridge University Press, Cambridge, 2000.
[11] D. Praetorius: Finite Element Method, Lecture Notes.
[12] D. Praetorius: Introduction to Boundary Element Method, lecture held atHumboldt-University of Berlin from July 16-20, 2007.
[13] W. Rudin: Functional analysis. Second edition. International Series in Pure andApplied Mathematics. McGraw-Hill, Inc., New York, 1991. xviii+424 pp.
87

[14] F.-J. Sayas: The validity of Johnson-Nedelec’s BEM-FEM coupling on polygonalinterfaces. SIAM J. Numer. Anal. 47 (2009), no. 5, 3451–3463.
[15] O. Steinbach: Numerical approximation methods for elliptic boundary valueproblems: Finite and boundary elements, Springer, New York, 2008.
[16] D. Werner: Funktionalanalysis. Third, revised and extended edition. Springer-Verlag, Berlin, 2000. xii+501 pp. ISBN: 3-540-67645-7
88