Automatic ionospheric scintillation detector for global navigation satellite system receivers

of 10
description
Automatic ionospheric scintillation detector for globalnavigation satellite system receivers
Transcript of Automatic ionospheric scintillation detector for global navigation satellite system receivers
-
tir
ivar Dtent
to allatioin Gthe
can be modelled as a function of scintillation indices like amplitude scintillation index (S4), phase scintillation index(), C/N and elevation angle with respect to the time. In this study, the GNSS Ionospheric Scintillation and TEC
services, especially for space-based augmentation systems(SBAS) in the low latitude regions, as it negatively impactsthe availability and integrity requirements of SBAS.
lisf
www.ietdl.org
7TNThe morphology of scintillation occurrences at differentatitude regions (aurora, mid and equatorial) has beennvestigated by several authors [38]. Amplitude and phasecintillations of global positioning system (GPS) arerequently observed along the equatorial regions during
essb02his is an open access article published by the IET under the Creative ConCommercial-NoDerivs License (http://creativecommons.org/licenselocked loop produce tracking errors in GNSS signals duringthe scintillation periods. Hence, modelling of scintillationsis one of the major concerns for improving positionalaccuracy.Several scintillation models have been developed for
valuating the ionosphere. The phase screen model was aeminal effort in this direction that described thecintillation effects after assuming the ionised ionosphere toe a thin screen and a function of total electron contentamplitude and phase scintillations [2]. Ionosphericscintillation is one of the foremost threats to GNSS
of GNSS receivers such as delay locked loop and phased
ionosphere (patches, bubbles and plumes), resulting in bothmonitor receiver located at the K L University, Vaddeswaram, India, sited in low latitudes, provided the data for the real-time analysis of ionospheric scintillations. This paper describes an ionospheric scintillation model (RTISM), whichdetermines the automatic threshold for different scintillation signals using the Neyman Pearson detector. The results ofthe RTISM model include estimation, detection and mitigation of ionospheric scintillations using wavelet analysis,HilbertHuang transform and binary hypothesis test. The RTISM model has been tested for major scintillation eventsobserved during the geomagnetic storms that occurred in the maximum solar activity periods of the 24th solar cycle(20132014).
1 Introduction
Global navigation satellite system (GNSS) is a worldwidecontinuous space monitoring radio navigation system forcommunication and navigation applications. Thenavigational performance of L-band GNSS signals isstrongly affected by the dispersive nature of ionosphericirregularity that results in rapid uctuations in the amplitudeand phase of GNSS radio signals. These are known asscintillations. Ionospheric scintillations are functions oflocal time, geo activity, solar activity, season, location ofthe receiver and position or geometry of the satellites [1].The signal quality of GNSS degrades because of these deepfades/uctuations when it travels through the turbulent
solar maximum after sunset [9]. Sporadic-E is an unusualform of radio propagation using characteristics of theionosphere, which causes the sudden commencement ofionospheric disturbances after sunset [10, 11]. Notably,the impacts of scintillation are not mitigated by thedual-frequency technique that is effective against theproblem of ionospheric delay. Hence, the requirement for areal-time scintillation model for GNSS receivers over lowand high latitude regions cannot be denied. The intensescintillations of GNSS signal may also cause the navigationsystem to fail by reducing the GNSS signal trackingcapability and increasing the acquisition time by blockingthe satellite signal. The loss of signal or loss of lock andcycle slips result in increased dilution of precision thatlimits GNSS positional accuracy [12]. Also, tracking loopsPublished in IET Radar, Sonar and NavigationReceived on 11th May 2014Revised on 5th October 2014Accepted on 16th October 2014doi: 10.1049/iet-rsn.2014.0232
Automatic ionospheric scinnavigation satellite systemDevanaboyina Venkata Ratnam1, Gampala S1Department of ECE, K L University, Vaddeswaram, Guntu2Global Navigation Satellite Systems Laboratory, DepartmYuseong-gu, Daejeon 305-701, Republic of KoreaE-mail: [email protected]
Abstract: Severe ionosphere scintillations have been knownNavigation Satellite System (GNSS) receivers. The scintiavailable GNSS satellites by causing the loss of lockscintillations is imperative for monitoring the activities ofISSN 1751-8784
llation detector for globaleceiversvaraprasad1, Jiyun Lee2
, Andhra Pradesh, Indiaof Aerospace Engineering, KAIST 335 Gwahangno,
ffect the performance and measurement accuracy of Globaln in signal amplitude and phase reduces the number ofNSS receivers. Hence, the investigation of ionosphericatmosphere, ionosphere and space weather. Scintillationsommons Attribution-s/by-nc-nd/3.0/)
IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232
-
(TEC) uctuations and refractive index [13]. Theclimatological models such as Wide Band MODel andGlobal Ionospheric Scintillation Model are other popularionospheric scintillation models. However, these models aremore strongly dependable on a global rather than regionalscale. Besides, they predict scintillations for xed temporalvalues at low latitudes only [14]. Amplitude scintillation(S4) index and phase scintillation index of GNSS station 6(Novatel) are standard deviations of a sixth-orderButterworth high-pass ltered raw signal intensity andcarrier phase measurements with a cut-off frequency of 0.1Hz [15]. Signicantly, a considerable number of false andmissed detections have been observed with these.Sometimes, multipath signals are also misinterpreted asscintillation signals.In this paper, an automatic scintillation detector has been
implemented based on HilbertHuang transform (HHT) andNeymanPearson (NP) detector. Here, the authors havemeasured the S4 and phase scintillation indices, and thereal-time ionospheric scintillation model (RTISM) and
2.1 Ionospheric scintillation estimation
which are important to study both in time and frequency
with high resolution, through localised information. Theestimation of ionospheric scintillations was carried outusing wavelet transform and HHT. HHT is a datadependent timefrequency analysis technique that producessharper results compared to fast Fourier transform andwavelet transform [17]. The HHT has two signicantcomponents, namely empirical mode decomposition (EMD)and Hilbert spectral analysis. EMD decomposes the dataadaptively into a specic number of frequency modesknown as intrinsic mode functions (IMFs) [17].
2.2 Detection of ionospheric scintillation events
The wavelet and HHT decompositions of scintillation signalswere carried out to identify and extract the intensity ofscintillation signals. The detection of ionosphericscintillation was implemented using binary hypothesistesting [18]. The analysis started with a statisticaldescription of the signals with a probability density function(pdf) that conrmed the testing of the measurement under
www.ietdl.orgdomains. Signicantly, the wavelet transform tool has beenused both in the time and frequency domains [16]. Theadvantages of wavelet analysis were used to study thenon-stationary GPS data under ionospheric scintillations,
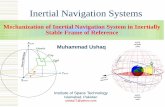
Fig. 1 Methodology for ionospheric scintillation detectionThe statistical observables such as amplitude (S4) and phasescintillation indices (j) were assumed to be Gaussianprocesses for analysis during the geomagnetic stormoccasion. The non-homogeneous ionosphere causesirregular variations in the features of GPS signal. Hence,the ionospheric scintillations have different characteristics,RTISM with HHT models have been compared. RTISMwill be useful for implementation and testing on real-timeeld programmable gated array (FPGA)-based GNSSreceivers.
2 Automatic ionospheric scintillationdetector
The ionospheric scintillation model (RTISM) has beendivided into three parts: estimation, detection and mitigationof the ionospheric scintillation signals.IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232 This is an open access arti
NonCommercial-NoDeach of the two hypotheses null and alternate. Thelikelihood-ratio test was performed using a more commonspecial case of the Bayes criterion called the NeymanPearson criterion [19]. The NP detectors are best suited tosolve the binary statistical decision problem of ionosphericscintillation detection to get the threshold value, and canachieve maximum detection power for a specic false alarmlevel even when sufcient prior information is unavailable[18].
2.3 Mitigation of ionospheic scintillation intensity
The variations in the received signal power can be understoodby comparing the scintillated and scintillation-free signals (noscintillation case) [19]. The threshold setting and mitigationof scintillation can be carried out through the correlation ofthese two signals. The scintillations can be automaticallytackled when signal strength is greater than a certainthreshold. The automatic threshold value was applied tomitigate the scintillation layer-wise for precise detection andextraction of the scintillation-free signal. The wavelet andEMD denoising methods were used for modelling theionospheric scintillation. The statistical observables such asamplitude (S4) and phase scintillation indices (j) wereassumed to be Gaussian processes for the analysis. Fig. 1depicts the ow process of the methodology used for the703cle published by the IET under the Creative Commons Attribution-erivs License (http://creativecommons.org/licenses/by-nc-nd/3.0/)
-
RTISM model using GNSS ionospheric scintillationmeasurements.
2.3.1 Binary hypothesis test for thresholdestimation: Ionospheric scintillation detection is adecision criterion of binary source. S(S4 or j) wasconsidered as the Gaussian process and Si (s0 and s1) werethe two binary signals traversing the ionosphere. Both wereconsidered as events in the sample space of S. s0 wasscintillation-free and given by (1) while s1 was describedas the scintillation signal calculated as per (2).The GNSS signal, the scintillation-free reference signal,
can be given as [18]
s0 = A0e jF D (1)
where A0 is the amplitude, is the phase and D is the coarseacquisition (C/A) code.When the GNSS signal is affected by the ionospheric
scintillations, the amplitude fades and phase variations aregiven by [18]
s1 = A0A( )
e j(F+F) D (2)
p(y|si) for i = 0, 1 probability of y GNSS received signalwas the true hypothesis. The conditional probabilities of s0and s1 were used to conduct a likelihood-ratio test ((y)) [19]
^ (y) = +s1
s0l (5)
As per the NP criterion, the decision process is designed tomaximise the probability of detection under the constraintthat the probability of false alarm P does not exceed a setconstant. Typical values are given as 10 7 Pfa 10 3,0.1 Pd 0.9 [19]. The NP detector is a problem ofconstrained optimisation that uses the Lagrange multiplier(l) [19].The NP detector rule is represented as
G = p(y|s1) l[p(y|so) a0] (6)
where 0 is a desired value [19]. NP criterion was applied toestimate the relevant parameters, namely the probability offalse alarm, probability of detection, probability of misseddetection and nally, the threshold.
or th
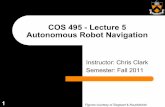
www.ietdl.orgFig. 2 C/N0 ratio, S4, sigma parameters against elevation angle fA represents the uctuations in the amplitude while represents the phase variations in the GNSS signal.The received signal was represented as yi (Si + noise).
Deciding which hypothesis was true depended upon thereceived signal strength of GNSS measurements. Twoobservations, H0 and H1, were related to GNSS signals s0and s1. The pdfs were calculated by [19]
H0:p y s0( ) = e(y
2/2)NameMeNameMeNameMeNameMe2p
(3)
H1: p y s1( ) = e (ym)/2( )NameMeNameMeNameMeNameMe
2p
2
(4)
where is the mean of the Gaussian process.704This is an open access article published by the IET under the Creative CNonCommercial-NoDerivs License (http://creativecommons.org/licenseThe probability of false alarm can be calculated as [19]
Pfa = erfcloge l
m+ m
2
[ ](7)
The probability of detection (PD) can be estimated as [19]
PD = erfcloge l
m m
2
[ ](8)
The probability of missed detection (Pmiss) can be estimatedas
Pmiss = 1 PD (9)
e 1 June 2013 PRN 4ommons Attribution-s/by-nc-nd/3.0/)
IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232
-
Finally, the threshold can be calculated as
T = loge lm
+ m2
[ ](10)
The threshold (T ) value was used to denoise the signals usingwavelet and HHT.
3 Results and discussion
The GPStation-6 GNSS receiver used in this study is amulti-frequency, multi-constellation GNSS ionosphericscintillation and TEC monitor (GISTM) receiver locatedat the K L University, Guntur (16 181N, 80 291 E).The receiver outputs regular GPS ionospheric TEC andscintillation data. Ionospheric TEC data contains variousparameters such as PRN number, latitude, longitude,
e GN
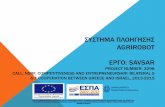
www.ietdl.orgFig. 3 For estimating the ionospheric amplitude scintillations of tha Second-order daubechies wavelet decompositionb HHT decompositionIET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232 This is an open access arti
NonCommercial-NoDSS signal (PRN 4, 1 June 2013)705cle published by the IET under the Creative Commons Attribution-erivs License (http://creativecommons.org/licenses/by-nc-nd/3.0/)
-
GPS week number, GPS time of the week (GPS TOW),azimuth angle, elevation angle, slant TEC and verticalTEC at 1 Hz sampling rate. The scintillation data
provide S4 and j for every minute with a 50 Hzsampling rate. The robust tracking of GNSS signals, inharsh environments such as geomagnetic storms that
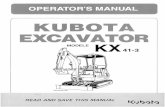
Fig. 4 Amplitude scintillation detection and mitigation using the binary hypothesis analysis and wavelet denoising (PRN: 4, 1 June 2013,K L University)
le fo
www.ietdl.orgFig. 5 C/N0 ratio, S4 and sigma parameters against elevation ang706This is an open access article published by the IET under the Creative CNonCommercial-NoDerivs License (http://creativecommons.org/licenser the 18 June 2013 PRN no. 12ommons Attribution-s/by-nc-nd/3.0/)
IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232
-
cause severe scintillations, is a challenge to the safety oftransportation (civil aviation) [20]. The solar maximumperiod is crucial for analysing irregularities in lowlatitude regions and is also likely to give rise tomagnetic storms, ionospheric storms and disruption ofthe radio system, causing intense ionosphericscintillations. The strength of ionospheric scintillationsincreases as solar maximum activity increases (peak inthe 24th solar maximum period of the year 2013). Inthis paper, ionospheric scintillation data during majorstorm events occurring in the 24th solar maximumperiod (20132014) were used to test the RTISM model.
3.1 Amplitude scintillations data results
The GNSS signal interferences because of multipath can bemisinterpreted as ionospheric scintillations [21]. Todifferentiate the scintillations and multipath signals,amplitude and phase uctuation intensities of GNSSsatellites were considered, which possess an elevation anglegreater than 30. PRN 4 satellite was affected because ofthe geomagnetic storm on 1 June 2013, as shown in Fig. 2(Kp index: 6, Dst index 116 nT). It may be observed thatthe PRN 4 satellite signal underwent strong amplitude aswell as phase scintillations in the post-sunset period, that is,
sign
www.ietdl.orgFig. 6 For estimating the ionospheric phase scintillations of GNSSa Second-order daubechies wavelet decompositionb HHT decompositionIET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232 This is an open access arti
NonCommercial-NoDal (PRN 12, 18 June 2013)707cle published by the IET under the Creative Commons Attribution-erivs License (http://creativecommons.org/licenses/by-nc-nd/3.0/)
-
ry hy
www.ietdl.orgS4 = 0. 6 and sigma index = 1 radian when C/N0 ratio was 50dB-Hz during 18:0019:00 IST (hours). For estimating theamplitude scintillations of the GNSS signal, thesecond-order daubechies wavelet decomposition wasperformed to analyse the amplitude scintillation for highresolution and localise the non-uniform characteristics ofionospheric scintillations (Fig. 3a). Db2 wavelet is simpleand easy to implement in real-time FPGA/digital signalprocessing processors. Low-order wavelet bases can trackthe scintillation signal feature with minimum time delay. Inthis model, dB2 preferred to track rapid changes inamplitude and phase scintillation signals. Daubechieswavelet supports longer scaling and detailed informationusing fewer or more values of the signals.The 5-layer S4 information provides impressive clarity in
the estimation of amplitude scintillation. From the gure, itcan be seen that the two scintillation events were captured
Fig. 7 Detection and mitigation of phase scintillation using binaK L University)by layers 1 and 2. Layers 35 displayed smaller variationsof scintillation signals as compared to layers 1 and2. Most of the signal information could be reconstructedusing the rst two layers. From layer 1, the scintillationevent disturbance (S4 = 0.6) may be observed at 18.6 hwhile the second disturbance (S4 = 0.4) can be seen at19.4 h.HHT technique was applied to amplitude scintillation data
for PRN4. Fig. 3b shows the original signal, IMFs of S4 indexvalues, indicating the decomposed levels from short to longperiods (IMF 1, IMF 2,, IMF 5). The residue indicatedthe trend of the S4 index variations. It is evident fromFigs. 3a and b that the HHT decomposition techniqueextracted the smallest changes in the signal, and was moreefcient than the wavelet decomposition method.Fig. 4 shows without scintillation and scintillation-affected
GNSS satellite signals. As discussed, the scintillation-freesignal was considered as the null hypothesis (referencesignal) whereas scintillation-affected signal was consideredas the alternate hypothesis.The hypothesis test result of normal distribution is also
shown in Fig. 4 (middle panel). The transitionalprobabilities and density regions for null and alternativehypotheses have been calculated and depicted in Fig. 4.
708This is an open access article published by the IET under the Creative CNonCommercial-NoDerivs License (http://creativecommons.org/licenseThe probability of false alarm was set at 0.05 using (7),and the probability of detection of scintillations value was0.9998 as per the NP likelihood-ratio test of (5) and (8).The threshold value obtained thus was 0.4739. Theautomatic threshold applied to all the decomposed layers ofthe wavelet and HHT decompositions in order to mitigatethe scintillations (Figs. 3a and b). Fig. 4 shows thedenoised received signals obtained using wavelet and HHTsalong with the measured S4 index values. The maximumvalue of S4 observed was 0.58 at 18:48 H (LT) while thedenoised values obtained at that time were 0.23 and 0.32using wavelets and HHT, respectively. It is evident fromthe results that the elimination of noise components isbetter for the HHT technique as compared to wavelettransform (Fig. 4).
3.2 Phase scintillation analysis
pothesis analysis and wavelet denoising (PRN: 12, 18 June 2013,Fig. 5 shows the phase scintillation index values of PRNNo.12 on 18 June 2013. The high uctuations of GNSSsignal phase during the post sunset period around evening18:30 to 21:30 IST (hours) may be observed from thebottom panel of Fig. 5. The phase uctuations (Sigmaindex) of the PRN 12 varied as high as up to 0.6,indicating strong scintillations. It may also be observedfrom the middle panel of Fig. 5 that the amplitudescintillations were moderate. Fig. 6a shows thesecond-order Daubechies wavelet decomposition for theestimation of the scintillations. The phase scintillations ofPRN 12 were decomposed into wavelet coefcient layers15, as shown in panels 26 (from top) of Fig. 6. Fromlayer 1, scintillation event disturbance (phase scintillationindex = 0.1) may be observed at 19.2 h, with the seconddisturbance (phase scintillation index is 0.2) between19.74 and 19.98 h. Fig. 6b indicates the IMFs obtainedusing HHT where even the smallest features wereextracted. IMF 1 represents the high frequency noise whileIMF 2 and IMF 3 contain the signicant features ofthe signal. Both wavelet and HHT techniques utilisedthe threshold value to achieve a better ltering process.The localisation of the information regarding the irregular
ommons Attribution-s/by-nc-nd/3.0/)
IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232
-
www.ietdl.orgfeatures of ionospheric scintillations was investigated in thetimefrequency domain using wavelet decomposition, asshown in Figs. 6a and b. Fig. 7 shows the comparisonbetween scintillation-free signal (reference), considered asthe null hypothesis signal, and signal with scintillation(PRN 13 on 19 February 2014), which had been taken asthe alternate hypothesis signal. Normal distribution resultsare shown in Fig. 7 (bottom panel). The probability offalse alarm was set at 0.09 and the probability of detectionof scintillations value at 0.9998. The estimated thresholdvalue was 0.4219. The estimated threshold was applied tothe wavelet and HHT decomposed layers, as shown inFig. 7 (bottom panel).
Table 1 Estimation and detection of amplitude scintillations using th
S. no. PRN no. and date Estimatedthreshold
Measured Svalues
1 18 March 2013 PRN 8 0.3793 0.36632 31 May 2013 PRN 28 0.4948 0.56323 1 June 2013 PRN 4 0.5346 0.58584 6 June 2013 PRN 4 0.4977 0.53895 7 June 2013 PRN 4 0.4931 0.50786 8 June 2013 PRN 28 0.5007 0.53187 28 June 2013 PRN 2 0.4906 0.52148 29 June 2013 PRN 5 0.4738 0.50299 30 June 2013 PRN 2 0.4907 0.568110 19 February 2013 PRN 23 0.5678 0.6569
Fig. 8 Mitigation of amplitude scintillations using the NP ionospheric
IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232 This is an open access arti
NonCommercial-NoDThe reconstructed signal obtained using wavelets and HHThas been shown in Fig. 7. Maximum value of observedwas 0.6 at 19:45 H (LT) and the corresponding denoisedsignal levels were 0.24 and 0.2, using wavelet transformand HHT, respectively. The performance of the automaticscintillation detector was tested with several ionosphericscintillation data of geomagnetic storms (20132014). Theamplitude scintillation results are shown in Fig. 8. Thecorresponding threshold estimation, measured S4 values andestimated S4 values are shown in Table 1. The phasescintillation results are shown in Fig. 9. The correspondingthreshold estimation, measured sigma values and estimatedsigma values are described in Table 2.
e NP detector
4 Estimated S4values
False alarmrate
Probability ofdetection
0.1954 0.01 0.99990.3063 0.0200 0.99980.2763 0.0300 0.99970.2660 0.0300 0.99980.2677 0.0200 0.99980.3297 0.0200 0.99980.3457 0.0200 0.99980.2383 0.0100 0.99980.3454 0.0200 0.99980.4441 0.0300 0.9997
scintillation detector
709cle published by the IET under the Creative Commons Attribution-erivs License (http://creativecommons.org/licenses/by-nc-nd/3.0/)
-
www.ietdl.org4 Conclusions
Geo-magnetic storms enhance the scintillation intensities andthereby introduce tracking and range errors in GPSnavigation system measurements. There are two outcomesof the automatic scintillation detector: (i) thresholdestimation using NP detector and (ii) estimation anddenoising of GNSS signals using wavelets and HHT. TheGNSS received signal contains signals with and withoutscintillations. The main technical challenge of any GNSSreceiver is that it should be able to identify whether thescintillations are induced or not. To address this issue, abinary hypothesis problem was considered as H0 (withoutscintillations) and H1 (with scintillations). The GNSSreceived signal was analysed with wavelets and HHT toextract the features of scintillations. The NP
Fig. 9 Mitigation of phase scintillations using using the NP ionospheri
Table 2 Estimation and detection of phase scintillations using the NP
S. no. PRN and date Threshold Measured sigmavalues
1 31 May 2013 PRN 9 0.4046 0.95072 31 May 2013 PRN 12 0.5445 1.35283 6 June 2013 PRN 4 0.6429 1.90994 7 June 2013 PRN 12 0.4581 0.84865 8 June 2013 PRN 4 0.5681 1.74176 28 June 2013 PRN 2 0.5965 1.42757 29 June 2013 PRN 5 0.4852 1.61948 30 June 2013 PRN 5 0.3909 0.54219 30 June 2013 PRN 4 0.5384 1.601210 19 February 2013 PRN 23 0.3122 0.4851
710This is an open access article published by the IET under the Creative CNonCommercial-NoDerivs License (http://creativecommons.org/licenselikelihood-ratio test was conducted on conditional Gaussianprobability densities of receiving signals and referencesignals. The probability of false alarm, probability ofdetection of signal and threshold values were calculated.The extracted features of scintillations were denoised basedon the estimated threshold values. The ionosphericscintillation data during the major geomagnetic stormevents occurring in the 24th solar maximum period (20132014) were used to test the RTISM model. It was foundthat the automatic scintillation detector performed welleven during adverse space weather conditions. Further, it isevident that the HHT based on EMD technique performedbetter than wavelets since the former was more suitable fornon-stationary and non-linear signals. In the future, anautomatic ionospheric scintillation detector will beimproved in the following ways:
c scintillation detector
detector
Estimated sigmavalues
False alarmrate
Probability ofdetection
0.3400 0.0400 0.99980.4538 0.0700 0.99971.1285 0.0600 0.99960.2243 0.0600 0.99980.8843 0.0400 0.99970.8363 0.1800 0.99970.4981 0.0600 0.99980.1956 0.0800 0.99980.8629 0.0900 0.99970.2254 0.0500 0.9999
ommons Attribution-s/by-nc-nd/3.0/)
IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232
-
1. HHT algorithm based on ensemble EMD.2. Real-time implementation of the proposed detector onFPGA-based software dened radio GNSS receivers byincorporating in tracking module.3. Multiple hypothesis techniques to separate the ionosphericscintillations, multipath components and receiver noise.
The real-time scintillation model will be useful fornowcasting as well as forecasting the occurrence ofionospheric scintillations in low latitude regions like India,Brazil and Malaysia.
5 Acknowledgments
The above work has been carried out under the projectDevelopment of Ionospheric Forecasting models forSatellite based Navigation Systems over low latitudestations sponsored by the Department of Science andTechnology, New Delhi, India, vide sanction letter no: SR/FTP/ETA-0029/2012, dated: 08.05.12. Dr. Jiyun Lee hasbeen supported by the National GNSS Research Centerprogram of Defense Acquisition Program Administrationand Agency for Defense Development. The authors thankall the reviewers for giving precise critical comments andsuggestions for improving the quality of this paper.
6 References
5 Aarons, J.: Equatorial scintillations: a review, IEEE Trans. AntennasPropag., 1977, 25, (5), pp. 729736, doi:10.1109/TAP.1977.1141649
6 Aarons, J.: Global morphology of ionospheric scintillation. Proc. Int.Conf. IEEE, April 1982, vol. 70, no. 4, pp. 360378
7 Kintner, P.M., Ledvina, B.M., de Paula, E.R., Kantor, I.J.: Size, shape,orientation, speed, and duration of GPS equatorial anomalyscintillations, Radio Sci., 2004, 39, (2), doi:10.1029/2003RS002878
8 Beach, T.L.: Global Positioning System Studies of EquatorialScintillations, PhD thesis, Cornell University, 1998
9 Basu, S., Basu, S.: Equatorial scintillations: a review, J. Atmos. Terr.Phys., 1981, 43, (5/6), pp. 473489
10 Aaron, J., Basu, S.: Ionospheric amplitude & phase uctuations at theGPS frequencies. Proc. Int. Conf. ION-GPS, Alexandria (Salt LakeUtah), USA, 1994, pp. 15691578
11 Aarons, J.: Equatorial F layer irregularity patches at anomalylatitudes, J. Atmos. Terr. Phys., 1985, 47, pp. 875883, doi:10.1016/0021-9169(85)90062-5
12 Beach, T.L.: Global Positioning System Studies of Equatorialscintillations, Ph.D. Thesis, Connell University, 1998, pp. 335
13 Rino, C.L.: A power law phase screen model for ionosphericscintillation, 1, Weak scatter, Radio Sci., 1979, 6, pp. 11351145
14 Forte, B., Radicella, S.M.: Comparison of ionospheric scintillationmodels with experimental data for satellite navigation applications,Ann. Geophys., 2005, 48, (3), pp. 505514
15 Van Dierendonck, A.J., Hua, Q., Klobuchar, J.: Ionosphericscintillation monitoring using commercial single frequency C/A codereceiver. Proc. Int. Conf. ION/GPS, Salt Lake City,Utah, 2224September, 1993
16 Burrus, C., Gopinath, R.A., Guo, H., et al.: Introduction to wavelets &wavelet transform (Prentice Hall, NJ, 1998)
17 Huang, N.E., Shen, S.S.P.: Hilbert Huang transform and itsapplications (World Scientic Publishers, 2005), vol. 5, pp. 223
18 Fu, W., Shaowei, H., Chris, R.: Real-time ionospheric scintillation
www.ietdl.orgequatorial ionospheric irregularities determined from GPS scintillationobservations, Ann. Geophys., 2006, 24, pp. 33293341
2 Kintner, P.M., Ledvina, B.M., de Paula, E.R.: GPS and ionosphericscintillations, Space Weather, 2007, 5, (9). doi:10.1029/2006SW000260
3 Wrenik, A.W., Secan, J.A., Fremouw, E.J.: Ionospheric irregularitiesand scintillation, Adv. Space Res., 2003, 31, (4), pp. 971981
4 Aquino, M., Moore, T., Dodson, A., Waugh, S., Souter, J., Rodriguez, F.S.: Implications of ionospheric scintillation for GNSS users in northerneurope, J. Navig., 2005, 58, (2), pp. 241256IET Radar Sonar Navig., 2015, Vol. 9, Iss. 6, pp. 702711doi: 10.1049/iet-rsn.2014.0232 This is an open access arti
NonCommercial-NoDU.S. Inst. of Navigation, Nashville, Tennessee, USA, 1417September1999, pp. 14611471
19 Kolawole, M.O.: Radar systems, peak detection and tracking (Elsevier,2002)
20 Rama Rao, P.V.S., Gopi Krishna, S., Vara Prasad, J., et al.:Geomagnetic storm effects on GPS based navigation, Ann. Geophys.,2009, 27, pp. 21012110
21 Forte, B., Radicella, S.M.: Problems in data treatment for ionosphericscintillation measurements, Radio Sci., 2002, 37, (6), pp. 096, doi:10.1029/2001RS0025081 Cervera1, M.A., Thomas, R.M.: Latitudinal and temporal variation of monitoring. Second Int. Tech. Meeting of the Satellite Division of the711cle published by the IET under the Creative Commons Attribution-erivs License (http://creativecommons.org/licenses/by-nc-nd/3.0/)