Aula 3 - ele.ita.brkawakami/ee254/EE254_2018_2oSem_Aula3_handouts.pdf · 8 Aguardar o proximo...
62
Aula 3 13 Ago 2018 EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 1 / 62
Transcript of Aula 3 - ele.ita.brkawakami/ee254/EE254_2018_2oSem_Aula3_handouts.pdf · 8 Aguardar o proximo...
Aula 3
13 Ago 2018
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 1 / 62
Resumo da aula passada - DMC
Informacao requerida sobre a planta:
Resposta a degrau g(n), n = 1, . . . ,Ns
(assume-se g(0) = 0 e g(n) = g(Ns),∀n ≥ Ns).
Parametros de projeto:
Peso do controle ρ
Horizonte de predicao N
Horizonte de controle M
Inicializacao:
Fazer G =
g(1) 0 · · · 0g(2) g(1) · · · 0
......
. . ....
g(N) g(N − 1) · · · g(N −M + 1)
Calcular KMPC = [ 1 0 · · · 0 ](GTG + ρIM)−1GT
Fazer k = 0, u(−1) = 0 e ∆u(−1) = ∆u(−2) = · · · = ∆u(−Ns) = 0
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 2 / 62
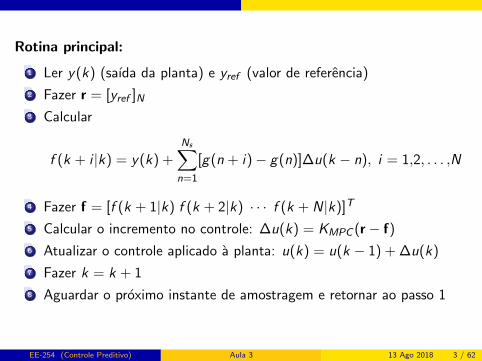
Rotina principal:
1 Ler y(k) (saıda da planta) e yref (valor de referencia)
2 Fazer r = [yref ]N3 Calcular
f (k + i |k) = y(k) +Ns∑n=1
[g(n + i)− g(n)]∆u(k − n), i = 1,2, . . . ,N
4 Fazer f = [f (k + 1|k) f (k + 2|k) · · · f (k + N|k)]T
5 Calcular o incremento no controle: ∆u(k) = KMPC (r − f)
6 Atualizar o controle aplicado a planta: u(k) = u(k − 1) + ∆u(k)
7 Fazer k = k + 1
8 Aguardar o proximo instante de amostragem e retornar ao passo 1
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 3 / 62
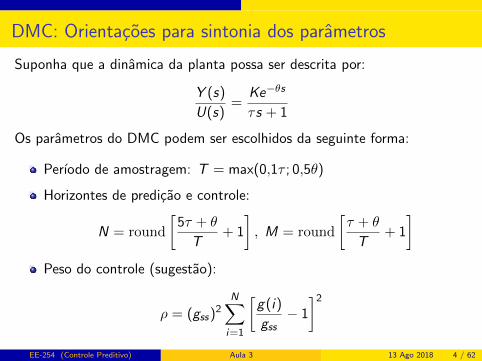
DMC: Orientacoes para sintonia dos parametros
Suponha que a dinamica da planta possa ser descrita por:
Y (s)
U(s)=
Ke−θs
τs + 1
Os parametros do DMC podem ser escolhidos da seguinte forma:
Perıodo de amostragem: T = max(0,1τ ; 0,5θ)
Horizontes de predicao e controle:
N = round
[5τ + θ
T+ 1
], M = round
[τ + θ
T+ 1
]Peso do controle (sugestao):
ρ = (gss)2N∑i=1
[g(i)
gss− 1
]2
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 4 / 62
Topicos da aula de hoje
DMC: Implementacao em Matlab/Simulink
Exemplo 1: Aquecedor de agua
Exemplo 2: Sistema com modelo de simulacao nao-linear
Uso de resposta a impulso
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 5 / 62
Implementacao em Matlab/Simulink
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 6 / 62
Arquivos Matlab a serem empregados
dmc.m
aquecedor dmc.mdl
resposta degrau aquecedor.mdl
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 7 / 62
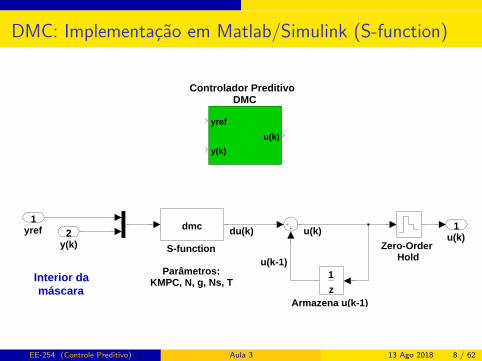
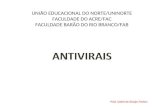
DMC: Implementacao em Matlab/Simulink (S-function)
Controlador PreditivoDMC
yref
y(k)u(k)
Interior damáscara
u(k)1
Zero-OrderHold
S-function
Parâmetros:KMPC, N, g, Ns, T
dmc
Armazena u(k-1)z1
y(k)2yref
1u(k)
u(k-1)
du(k)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 8 / 62
DMC: Detalhes da mascara
Parametros:
Peso do controle (escalar ρ)
Horizonte de predicao (escalar N)
Horizonte de controle (escalar M)
Resposta a degrau da planta (array g)
Perıodo de amostragem (escalar T )
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 9 / 62
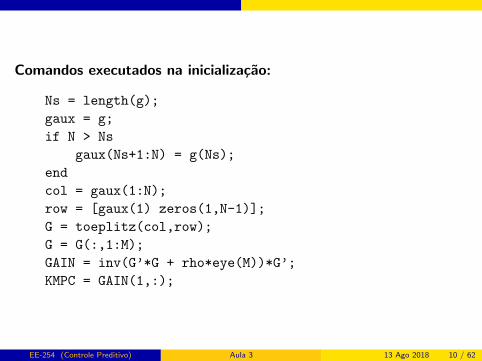
Comandos executados na inicializacao:
Ns = length(g);
gaux = g;
if N > Ns
gaux(Ns+1:N) = g(Ns);
end
col = gaux(1:N);
row = [gaux(1) zeros(1,N-1)];
G = toeplitz(col,row);
G = G(:,1:M);
GAIN = inv(G’*G + rho*eye(M))*G’;
KMPC = GAIN(1,:);
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 10 / 62
Alguns comentarios sobre S-functions
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 11 / 62
DMC: Codigo da S-function
Arquivo dmc.m
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 12 / 62
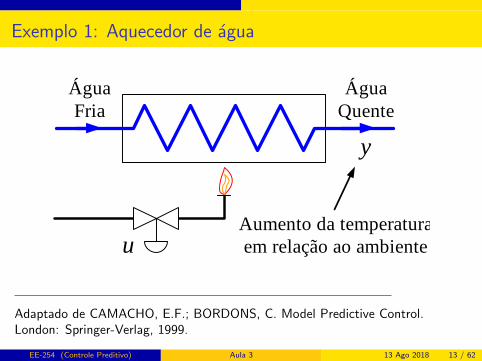
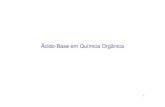
Exemplo 1: Aquecedor de agua
ÁguaFria
ÁguaQuente
y
Aumento da temperaturaem relação ao ambienteu
Adaptado de CAMACHO, E.F.; BORDONS, C. Model Predictive Control.London: Springer-Verlag, 1999.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 13 / 62
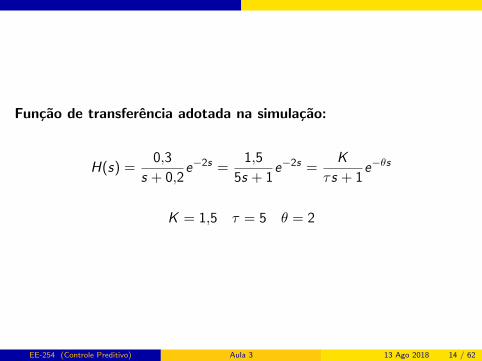
Funcao de transferencia adotada na simulacao:
H(s) =0,3
s + 0,2e−2s =
1,5
5s + 1e−2s =
K
τs + 1e−θs
K = 1,5 τ = 5 θ = 2
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 14 / 62
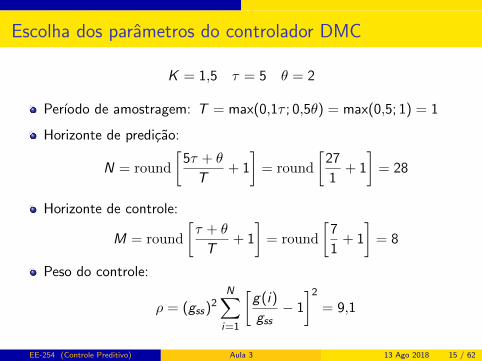
Escolha dos parametros do controlador DMC
K = 1,5 τ = 5 θ = 2
Perıodo de amostragem: T = max(0,1τ ; 0,5θ) = max(0,5; 1) = 1
Horizonte de predicao:
N = round
[5τ + θ
T+ 1
]= round
[27
1+ 1
]= 28
Horizonte de controle:
M = round
[τ + θ
T+ 1
]= round
[7
1+ 1
]= 8
Peso do controle:
ρ = (gss)2N∑i=1
[g(i)
gss− 1
]2
= 9,1
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 15 / 62
Roteiro para apresentacao do exemplo
1 Definir perıodo de amostragem no workspace.
2 Obter a resposta a degrau unitario em malha aberta:resposta degrau aquecedor.mdl
3 Abrir diagrama aquecedor dmc.mdl, inserir parametrosρ = 9.1,N = 28,M = 8 na mascara e executar a simulacao.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 16 / 62
Simulacoes a serem realizadas:
Inserir perturbacao de saıda tipo degrau.
Inserir perturbacao de entrada tipo degrau.
Alterar ganho da planta.
Inserir perturbacao de saıda tipo rampa.
Fixar N = 28 e variar M de 8 ate 1(Interpretacao: Calcular y = G∆u + f para k = 0 com M = 1).
Fixar M = 2 e variar N de 28 ate 2.
Variar ρ.
Inserir ruıdo de medida e variar ρ. Monitorar y na saıda da planta,antes do ponto de insercao do ruıdo.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 17 / 62
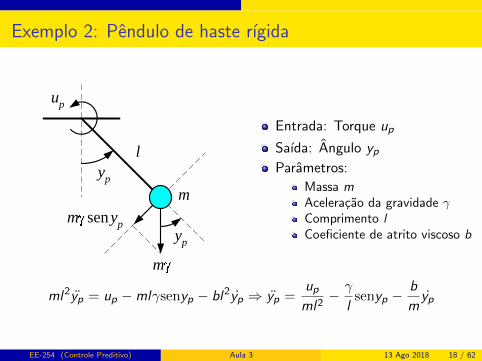
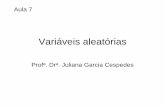
Exemplo 2: Pendulo de haste rıgida
m
l
up
m senyp
m
yp
yp
Entrada: Torque up
Saıda: Angulo ypParametros:
Massa mAceleracao da gravidade γComprimento lCoeficiente de atrito viscoso b
ml2yp = up −mlγsenyp − bl2yp ⇒ yp =upml2− γ
lsenyp −
b
myp
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 18 / 62
yp =upml2− γ
lsenyp −
b
myp
No equilıbrio:
upml2− γ
lsenyp = 0
up = mγlsenyp
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 19 / 62
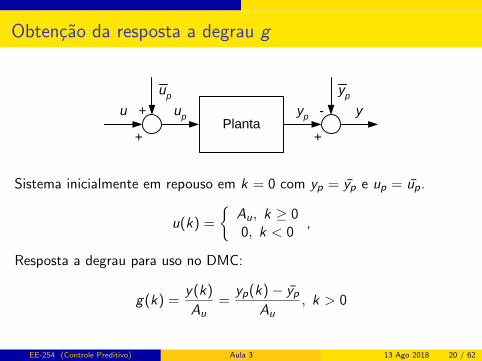
Obtencao da resposta a degrau g
Plantau up yp
+
+
+
- y
up yp
Sistema inicialmente em repouso em k = 0 com yp = yp e up = up.
u(k) =
{Au, k ≥ 00, k < 0
,
Resposta a degrau para uso no DMC:
g(k) =y(k)
Au=
yp(k)− ypAu
, k > 0
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 20 / 62
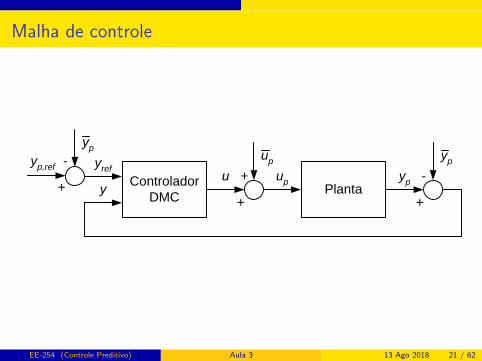
Malha de controle
ControladorDMC
Plantau
yref
y
up
up yp
yp
+
+
+
-yp,ref
+
-
yp
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 21 / 62
Arquivos a serem usados
1 dmc.m
2 parametros pendulo.m
3 resposta degrau pendulo.mdl
4 pendulo dmc.mdl
Parametros do pendulo (unidades SI): m = 1, l = 1, γ = 10, b = 2
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 22 / 62
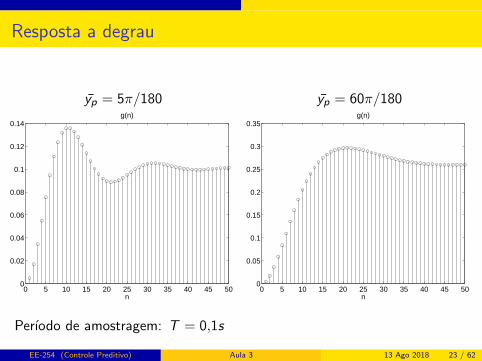
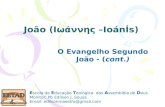
Resposta a degrau
yp = 5π/180
0 5 10 15 20 25 30 35 40 45 500
0.02
0.04
0.06
0.08
0.1
0.12
0.14g(n)
n
yp = 60π/180
0 5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35g(n)
n
Perıodo de amostragem: T = 0,1s
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 23 / 62
Realizar simulacoes em malha fechada com N = 10, M = 5, ρ = 1.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 24 / 62
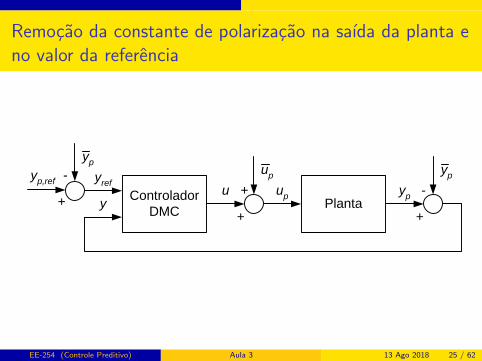
Remocao da constante de polarizacao na saıda da planta eno valor da referencia
ControladorDMC
Plantau
yref
y
up
up yp
yp
+
+
+
-yp,ref
+
-
yp
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 25 / 62
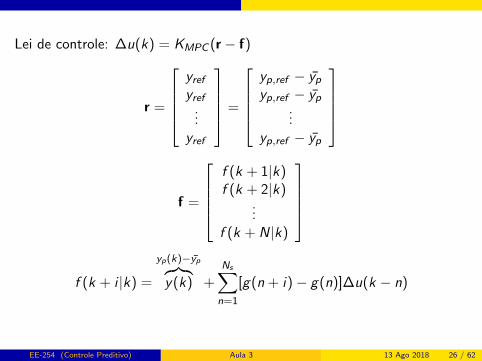
Lei de controle: ∆u(k) = KMPC (r − f)
r =
yrefyref
...yref
=
yp,ref − ypyp,ref − yp
...yp,ref − yp
f =
f (k + 1|k)f (k + 2|k)
...f (k + N|k)
f (k + i |k) =
yp(k)−yp︷︸︸︷y(k) +
Ns∑n=1
[g(n + i)− g(n)]∆u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 26 / 62
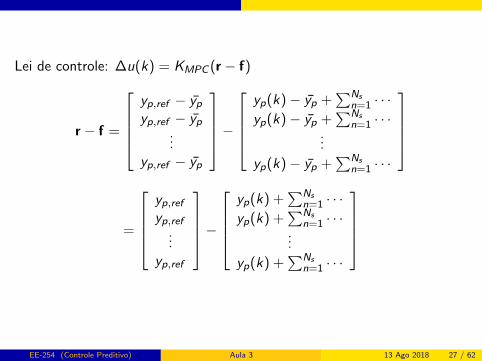
Lei de controle: ∆u(k) = KMPC (r − f)
r − f =
yp,ref − ypyp,ref − yp
...yp,ref − yp
−
yp(k)− yp +∑Ns
n=1 · · ·yp(k)− yp +
∑Nsn=1 · · ·
...
yp(k)− yp +∑Ns
n=1 · · ·
=
yp,refyp,ref
...yp,ref
−
yp(k) +∑Ns
n=1 · · ·yp(k) +
∑Nsn=1 · · ·
...
yp(k) +∑Ns
n=1 · · ·
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 27 / 62
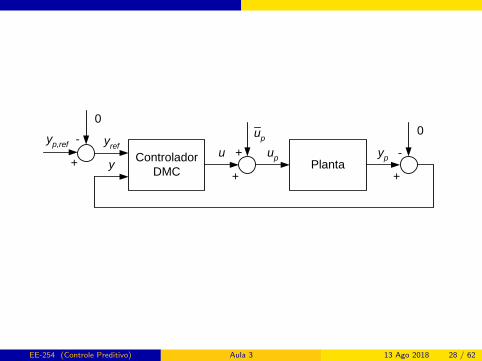
ControladorDMC
Plantau
yref
yup yp
+
+
+
-yp,ref
+
-
00up
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 28 / 62
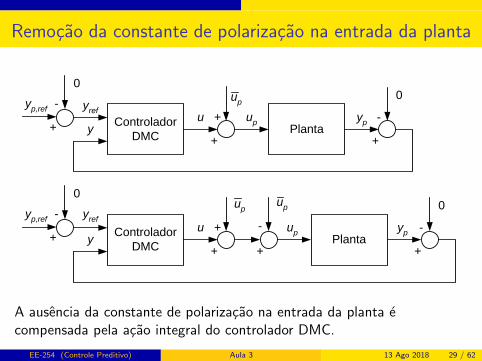
Remocao da constante de polarizacao na entrada da planta
ControladorDMC
Plantau
yup yp
+
+
+
-+
--
+
ControladorDMC
Plantau
yref
yup yp
+
+
+
-yp,ref
+
-
00
00
yp,ref yref
up
upup
A ausencia da constante de polarizacao na entrada da planta ecompensada pela acao integral do controlador DMC.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 29 / 62
Uso de resposta a impulso
Referencia: RICHALET, J.; RAULT, A.; TESTUD, J. L.; PAPON, J.Model predictive heuristic control: applications to industrial processes.Automatica, v. 14, p. 413 - 428, 1978.
Principais caracterısticas:
Modelo baseado na resposta a impulso.
Funcao de custo quadratica que penaliza os erros de rastreamentofuturos (sem termos relacionados ao esforco de controle).
Uso de trajetoria de referencia suavizada.
Obs: Pode-se incluir uma correcao de perturbacoes de saıda constantes,como na abordagem DMC.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 30 / 62
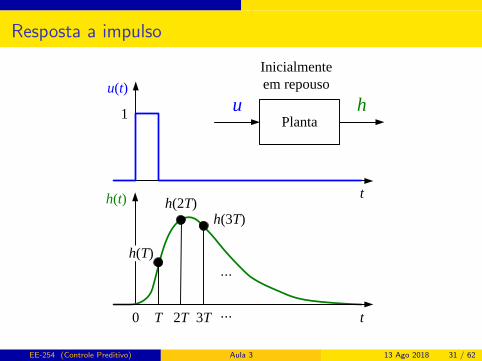
Resposta a impulso
h(T)
Plantau h
t
t0 T 2T
h(2T)h(3T)
3T
u(t)
h(t)
Inicialmenteem repouso
1
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 31 / 62
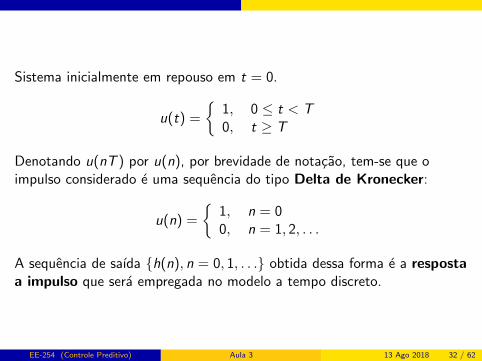
Sistema inicialmente em repouso em t = 0.
u(t) =
{1, 0 ≤ t < T0, t ≥ T
Denotando u(nT ) por u(n), por brevidade de notacao, tem-se que oimpulso considerado e uma sequencia do tipo Delta de Kronecker:
u(n) =
{1, n = 00, n = 1, 2, . . .
A sequencia de saıda {h(n), n = 0, 1, . . .} obtida dessa forma e a respostaa impulso que sera empregada no modelo a tempo discreto.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 32 / 62
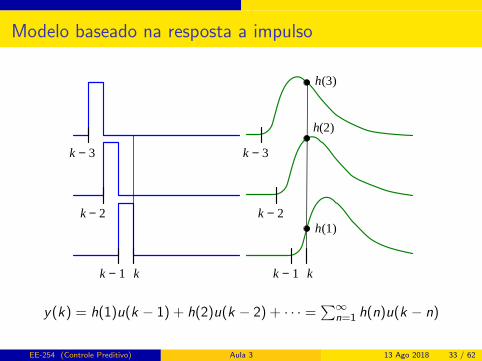
Modelo baseado na resposta a impulso
k − 1 k
k − 2
k − 3
k − 1 k
k − 2
k − 3
h(1)
h(2)
h(3)
y(k) = h(1)u(k − 1) + h(2)u(k − 2) + · · · =∑∞
n=1 h(n)u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 33 / 62
y(k) =∞∑n=1
h(n)u(k − n)
Observacoes:
Modelo de convolucao
{h(n), n = 0, 1, . . .} tambem e chamada “sequencia de ponderacao”
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 34 / 62
Obs: Relacao entre as respostas a impulso e a degrau
Supondo dinamica linear e invariante no tempo, tem-se
uimpulso(n) = udegrau(n)− udegrau(n − 1)⇒ h(n) = g(n)− g(n − 1)
h(0) = g(0)− g(−1)
h(1) = g(1)− g(0)
h(2) = g(2)− g(1)...
h(k − 1) = g(k − 1)− g(k − 2)
h(k) = g(k)− g(k − 1)
Sabendo que h(0) = g(0) = g(−1) = 0, conclui-se que
g(k) =k∑
i=1
h(i)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 35 / 62
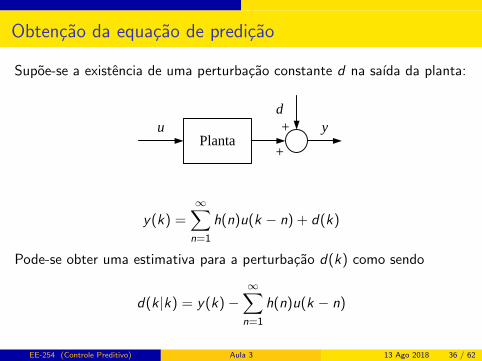
Obtencao da equacao de predicao
Supoe-se a existencia de uma perturbacao constante d na saıda da planta:
Plantau y
d+
+
y(k) =∞∑n=1
h(n)u(k − n) + d(k)
Pode-se obter uma estimativa para a perturbacao d(k) como sendo
d(k|k) = y(k)−∞∑n=1
h(n)u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 36 / 62
Predicao um passo a frente
y(k) =∞∑n=1
h(n)u(k − n) + d(k)
y(k + 1) =∞∑n=1
h(n)u(k + 1− n) + d(k + 1) =
= h(1)u(k) +∞∑n=2
h(n)u(k + 1− n) + d(k + 1)
Em termos de valores preditos:
y(k + 1|k) = h(1)u(k|k) +∞∑n=2
h(n)u(k + 1− n) + d(k + 1|k)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 37 / 62
Sob a hipotese de perturbacao constante:
d(k + 1|k) = d(k|k) = y(k)−∞∑n=1
h(n)u(k − n)
Logo:
y(k + 1|k) = h(1)u(k|k) +∞∑n=2
h(n)u(k + 1− n) + d(k + 1|k)
= h(1)u(k|k) +∞∑n=2
h(n)u(k + 1− n)
+y(k)−∞∑n=1
h(n)u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 38 / 62
y(k + 1|k) = h(1)u(k|k) +
∑∞n=1 h(n+1)u(k−n)︷ ︸︸ ︷
∞∑n=2
h(n)u(k + 1− n)
+y(k)−∞∑n=1
h(n)u(k − n)
y(k + 1|k) = h(1)u(k|k) + y(k) +∞∑n=1
[h(n + 1)− h(n)]u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 39 / 62
y(k + 1|k) = h(1)u(k|k) + y(k) +∞∑n=1
[h(n + 1)− h(n)]u(k − n)︸ ︷︷ ︸fu(k+1)
Com pequena sobrecarga de nomenclatura, a parcela
fu(k + 1) = y(k) +∞∑n=1
[h(n + 1)− h(n)]u(k − n)
sera denominada “resposta livre” da planta (valor de y(k + 1|k) obtido aose fazer u(k|k) = 0).
y(k + 1|k) = h(1)u(k|k) + fu(k + 1)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 40 / 62
Calculo da resposta livre
fu(k + 1) = y(k) +∞∑n=1
[h(n + 1)− h(n)]u(k − n)
Se a resposta a impulso for tal que
h(n + 1)− h(n)n→∞−→ 0
a somatoria na expressao de fu(k + 1) pode ser truncada em um numeroNs suficientemente grande de termos:
fu(k + 1) ' y(k) +Ns∑n=1
[h(n + 1)− h(n)]u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 41 / 62
Predicao i passos a frente
y(k) =∞∑n=1
h(n)u(k − n) + d(k)
y(k + i) =∞∑n=1
h(n)u(k + i − n) + d(k + i) =
=i∑
n=1
h(n)u(k + i − n) +∞∑
n=i+1
h(n)u(k + i − n) + d(k + i)
Em termos de valores preditos:
y(k + i |k) =i∑
n=1
h(n)u(k + i − n|k) +∞∑
n=i+1
h(n)u(k + i − n)
+d(k + i |k)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 42 / 62
Sob a hipotese de perturbacao constante:
d(k + i |k) = d(k|k) = y(k)−∞∑n=1
h(n)u(k − n)
Logo:
y(k + i |k) =i∑
n=1
h(n)u(k + i − n|k) +∞∑
n=i+1
h(n)u(k + i − n)
+y(k)−∞∑n=1
h(n)u(k − n)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 43 / 62
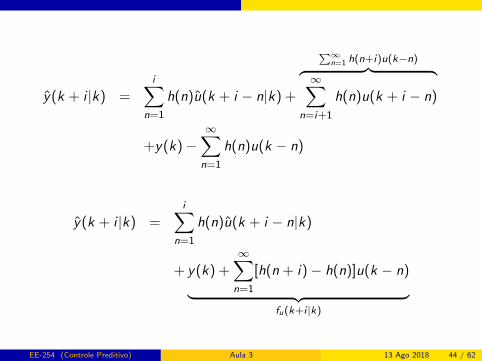
y(k + i |k) =i∑
n=1
h(n)u(k + i − n|k) +
∑∞n=1 h(n+i)u(k−n)︷ ︸︸ ︷
∞∑n=i+1
h(n)u(k + i − n)
+y(k)−∞∑n=1
h(n)u(k − n)
y(k + i |k) =i∑
n=1
h(n)u(k + i − n|k)
+ y(k) +∞∑n=1
[h(n + i)− h(n)]u(k − n)︸ ︷︷ ︸fu(k+i |k)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 44 / 62
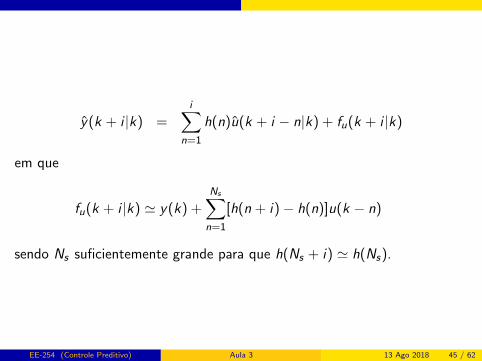
y(k + i |k) =i∑
n=1
h(n)u(k + i − n|k) + fu(k + i |k)
em que
fu(k + i |k) ' y(k) +Ns∑n=1
[h(n + i)− h(n)]u(k − n)
sendo Ns suficientemente grande para que h(Ns + i) ' h(Ns).
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 45 / 62
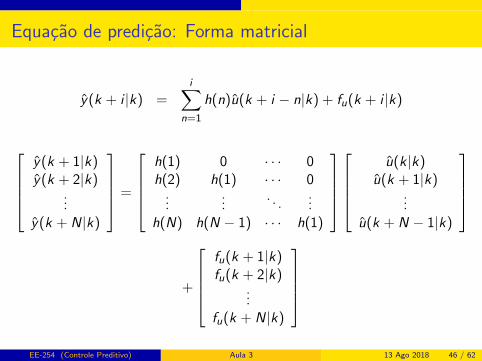
Equacao de predicao: Forma matricial
y(k + i |k) =i∑
n=1
h(n)u(k + i − n|k) + fu(k + i |k)
y(k + 1|k)y(k + 2|k)
...y(k + N|k)
=
h(1) 0 · · · 0h(2) h(1) · · · 0
......
. . ....
h(N) h(N − 1) · · · h(1)
u(k|k)u(k + 1|k)
...u(k + N − 1|k)
+
fu(k + 1|k)fu(k + 2|k)
...fu(k + N|k)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 46 / 62
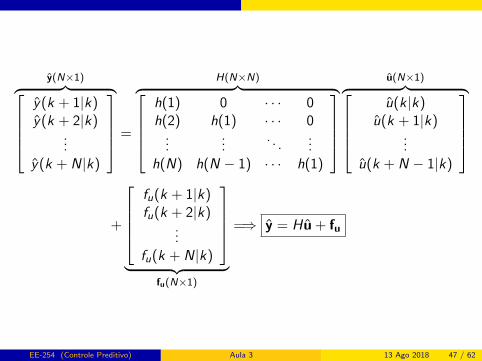
y(N×1)︷ ︸︸ ︷y(k + 1|k)y(k + 2|k)
...y(k + N|k)
=
H(N×N)︷ ︸︸ ︷h(1) 0 · · · 0h(2) h(1) · · · 0
......
. . ....
h(N) h(N − 1) · · · h(1)
u(N×1)︷ ︸︸ ︷u(k|k)
u(k + 1|k)...
u(k + N − 1|k)
+
fu(k + 1|k)fu(k + 2|k)
...fu(k + N|k)
︸ ︷︷ ︸
fu(N×1)
=⇒ y = Hu + fu
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 47 / 62
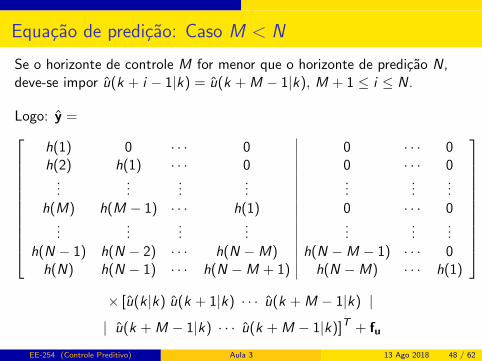
Equacao de predicao: Caso M < N
Se o horizonte de controle M for menor que o horizonte de predicao N,deve-se impor u(k + i − 1|k) = u(k + M − 1|k), M + 1 ≤ i ≤ N.
Logo: y =
h(1) 0 · · · 0 0 · · · 0h(2) h(1) · · · 0 0 · · · 0
......
......
......
...h(M) h(M − 1) · · · h(1) 0 · · · 0
......
......
......
...h(N − 1) h(N − 2) · · · h(N −M) h(N −M − 1) · · · 0h(N) h(N − 1) · · · h(N −M + 1) h(N −M) · · · h(1)
× [u(k|k) u(k + 1|k) · · · u(k + M − 1|k) |
| u(k + M − 1|k) · · · u(k + M − 1|k)]T + fu
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 48 / 62
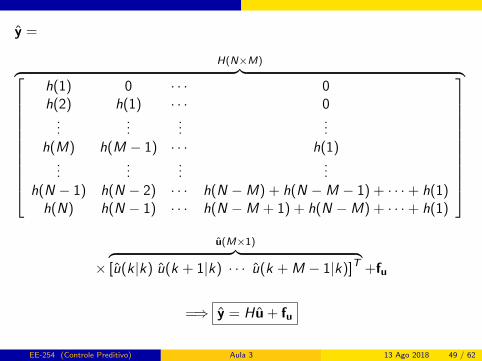
y =
H(N×M)︷ ︸︸ ︷
h(1) 0 · · · 0h(2) h(1) · · · 0
......
......
h(M) h(M − 1) · · · h(1)...
......
...h(N − 1) h(N − 2) · · · h(N −M) + h(N −M − 1) + · · ·+ h(1)h(N) h(N − 1) · · · h(N −M + 1) + h(N −M) + · · ·+ h(1)
×
u(M×1)︷ ︸︸ ︷[u(k|k) u(k + 1|k) · · · u(k + M − 1|k)]T +fu
=⇒ y = Hu + fu
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 49 / 62
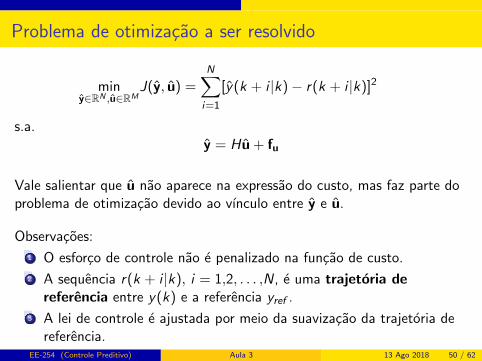
Problema de otimizacao a ser resolvido
miny∈RN ,u∈RM
J(y, u) =N∑i=1
[y(k + i |k)− r(k + i |k)]2
s.a.y = Hu + fu
Vale salientar que u nao aparece na expressao do custo, mas faz parte doproblema de otimizacao devido ao vınculo entre y e u.
Observacoes:
1 O esforco de controle nao e penalizado na funcao de custo.
2 A sequencia r(k + i |k), i = 1,2, . . . ,N, e uma trajetoria dereferencia entre y(k) e a referencia yref .
3 A lei de controle e ajustada por meio da suavizacao da trajetoria dereferencia.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 50 / 62
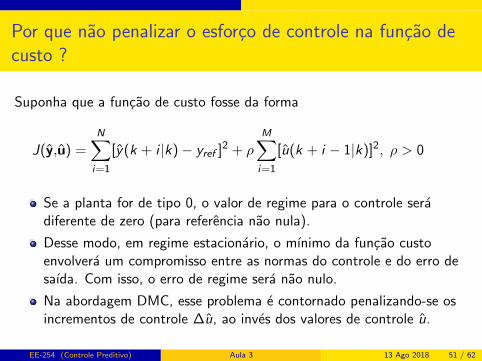
Por que nao penalizar o esforco de controle na funcao decusto ?
Suponha que a funcao de custo fosse da forma
J(y,u) =N∑i=1
[y(k + i |k)− yref ]2 + ρ
M∑i=1
[u(k + i − 1|k)]2, ρ > 0
Se a planta for de tipo 0, o valor de regime para o controle seradiferente de zero (para referencia nao nula).
Desse modo, em regime estacionario, o mınimo da funcao custoenvolvera um compromisso entre as normas do controle e do erro desaıda. Com isso, o erro de regime sera nao nulo.
Na abordagem DMC, esse problema e contornado penalizando-se osincrementos de controle ∆u, ao inves dos valores de controle u.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 51 / 62
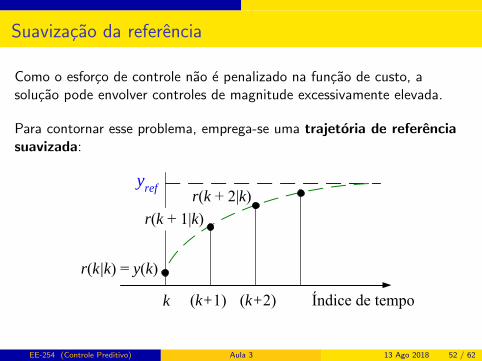
Suavizacao da referencia
Como o esforco de controle nao e penalizado na funcao de custo, asolucao pode envolver controles de magnitude excessivamente elevada.
Para contornar esse problema, emprega-se uma trajetoria de referenciasuavizada:
r k k
r k k
k
yref
r k|k y k
k+ k+
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 52 / 62
r k k
r k k
k
yref
r k|k y k
k+ k+
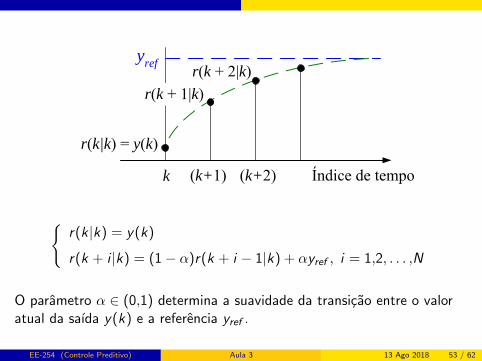
{r(k|k) = y(k)
r(k + i |k) = (1− α)r(k + i − 1|k) + αyref , i = 1,2, . . . ,N
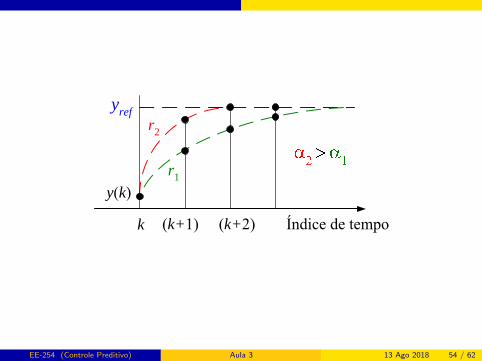
O parametro α ∈ (0,1) determina a suavidade da transicao entre o valoratual da saıda y(k) e a referencia yref .
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 53 / 62
k
yref
y k
k+ k+
r1
r2
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 54 / 62
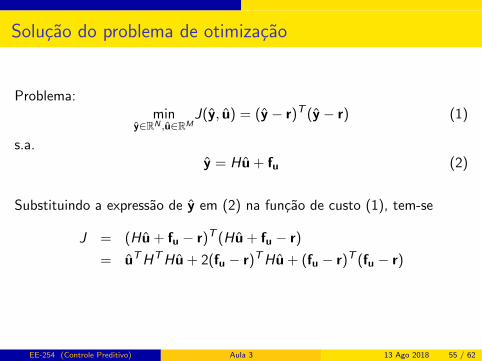
Solucao do problema de otimizacao
Problema:min
y∈RN ,u∈RMJ(y, u) = (y − r)T (y − r) (1)
s.a.y = Hu + fu (2)
Substituindo a expressao de y em (2) na funcao de custo (1), tem-se
J = (Hu + fu − r)T (Hu + fu − r)
= uTHTHu + 2(fu − r)THu + (fu − r)T (fu − r)
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 55 / 62
J(u) = uTHTHu + 2(fu − r)THu + (fu − r)T (fu − r)
Trata-se de uma funcao quadratica em u. Assim, como visto na aulapassada,
u∗ = (HTH)−1HT (r − fu)
desde que HTH seja positivo-definida.
Atencao particular deve ser tomada no caso de plantas com atraso detransporte (atraso puro, “tempo morto”).
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 56 / 62
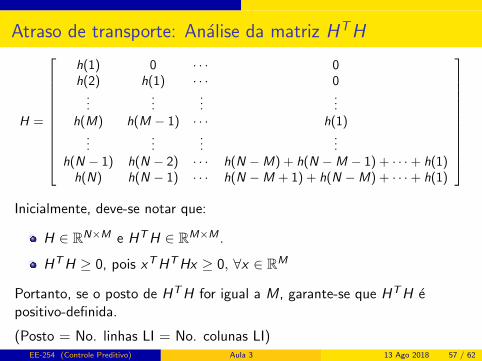
Atraso de transporte: Analise da matriz HTH
H =
h(1) 0 · · · 0h(2) h(1) · · · 0
......
......
h(M) h(M − 1) · · · h(1)...
......
...h(N − 1) h(N − 2) · · · h(N −M) + h(N −M − 1) + · · ·+ h(1)h(N) h(N − 1) · · · h(N −M + 1) + h(N −M) + · · ·+ h(1)
Inicialmente, deve-se notar que:
H ∈ RN×M e HTH ∈ RM×M .
HTH ≥ 0, pois xTHTHx ≥ 0, ∀x ∈ RM
Portanto, se o posto de HTH for igual a M, garante-se que HTH epositivo-definida.
(Posto = No. linhas LI = No. colunas LI)EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 57 / 62
Pode-se mostrar que o posto de HTH e igual ao posto de H.
Com efeito, dado x ∈ RM , tem-se
HTHx = 0M ⇒ xTHTHx = 0⇒ ||Hx || = 0⇒ Hx = 0N
em que 0M e 0N denotam vetores de zeros com dimensoes M × 1 e N × 1,respectivamente. Por outro lado,
Hx = 0N ⇒ HTHx = 0M
Logo, tem-se que HTHx = 0M ⇔ Hx = 0N , o que mostra que os espacosnulos de HTH e H sao iguais. Como o posto de uma matriz e igual aonumero de colunas menos a dimensao do espaco nulo, conclui-se que HTHe H tem o mesmo posto.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 58 / 62
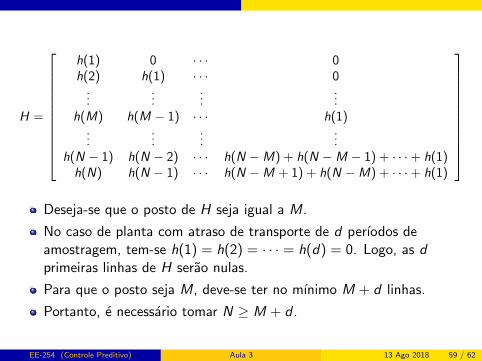
H =
h(1) 0 · · · 0h(2) h(1) · · · 0
......
......
h(M) h(M − 1) · · · h(1)...
......
...h(N − 1) h(N − 2) · · · h(N −M) + h(N −M − 1) + · · ·+ h(1)h(N) h(N − 1) · · · h(N −M + 1) + h(N −M) + · · ·+ h(1)
Deseja-se que o posto de H seja igual a M.
No caso de planta com atraso de transporte de d perıodos deamostragem, tem-se h(1) = h(2) = · · · = h(d) = 0. Logo, as dprimeiras linhas de H serao nulas.
Para que o posto seja M, deve-se ter no mınimo M + d linhas.
Portanto, e necessario tomar N ≥ M + d .
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 59 / 62

E necessario tomar N ≥ M + d .
Interpretacao: Na presenca de atraso, o efeito do controleu(k + M − 1|k) somente se manifestara na sequencia de valorespreditos da saıda a partir do termo y(k + M + d |k). Se N < M + d ,o efeito desse controle nao sera levado em conta na funcao de custo.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 60 / 62
Resumo da aula de hoje
DMC: Implementacao em Matlab/Simulink
Exemplo 1: Aquecedor de agua.
Exemplo 2: Pendulo de haste rıgida (modelo de simulacao nao-linear).
Consideracoes sobre as constantes de polarizacao na malha decontrole DMC.
Uso de resposta a impulso
Vale salientar que as abordagens vistas ate agora requerem convergenciada resposta a degrau ou resposta a impulso em malha aberta.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 61 / 62
Topico da proxima aula
Uso de funcoes de transferencia.
EE-254 (Controle Preditivo) Aula 3 13 Ago 2018 62 / 62