ARTICULATED VEHICLE MODEL - GitHub...
26
VEHICLE DYNAMICS - LATERAL ANDRÉ DE SOUZA MENDES ARTICULATED VEHICLE MODEL São Bernardo do Campo 2016
Transcript of ARTICULATED VEHICLE MODEL - GitHub...

VEHICLE DYNAMICS - LATERAL
ANDRÉ DE SOUZA MENDES
ARTICULATED VEHICLE MODEL
São Bernardo do Campo
2016

0.1 MODELO DO VEÍCULO ARTICULADO
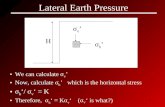
O modelo físico do conjunto é ilustrado na figura 1. Para caracterizar a dinâmica deste
sistema é utilizada a base ΩO = Oijk fixa no referencial inercial. A base ΩT = Ttxtytz é
solidária ao caminhão-trator e a base ΩS = Ssxsysz é solidária ao semirreboque. Os versores
tx e sx apontam para frente na direção longitudinal de ambos os módulos e os versores ty e syapontam para a esquerda. Para auxiliar a descrição das grandezas no eixo dianteiro é definida
a base ΩF = Fexeyez solidária ao eixo dianteiro com o versor ex apontando para frente
na direção longitudinal do pneu e ey apontando para a esquerda. Os pontos T e S localizam
o centro da massa do caminhão-trator e do semirreboque, respectivamente. F e R localizam
os eixos dianteiro e traseiro, respectivamente. A é o ponto de articulação e M é o eixo do
semirreboque. O ponto O é a origem do sistema e se encontra fixo no referencial inercial. A
distância a separa os pontos F e T e a distância b separa os pontos T e R. c separa os pontos Re A, d separa os pontos A e S e e separa os pontos S e M. Os vetores velocidade v e os ângulos
de deriva α recebem os subscritos referentes aos pontos aos quais eles estão associados.
A modelagem do caminhão-trator e semirreboque consiste na utilização de dois corpos
rígidos que se movimentam sobre um plano horizontal e são unidos por um ponto de articu-
lação. Desta forma, o modelo apresenta quatro graus de liberdade. Portanto, as coordenadas
generalizadas podem ser dadas por
q1 = x (1a)
q2 = y (1b)
q3 = ψ (1c)
q4 = φ, (1d)
onde x e y são as coordenadas longitudinal e transversal do centro de massa do caminhão-
trator, respectivamente. ψ é o ângulo de orientação absoluta do caminhão-trator e φ é o ângulo
de orientação relativa do semirreboque.
0.1.1 Modelo não linear
O vetor posição do centro de massa do caminhão-trator em relação ao ponto O é

OFigura 1 – Single track bicycle model.
pT/O = xi + yj. (2)
O vetor posição do centro de massa do semirreboque é
pS/O = [x− (b+ c) cosψ − d cos (ψ − φ)] i + [y − (b+ c) sinψ − d sin (ψ − φ)] j. (3)
Derivando a equação (2) em relação ao tempo temos
vT = xi + yj. (4)
Derivando a equação (3) em relação ao tempo temos
vS =[x+ (b+ c) ψ sinψ + d
(ψ − φ
)sin (ψ − φ)
]i + ...
... +[y − (b+ c) ψ cosψ − d
(ψ − φ
)cos (ψ − φ)
]j.
(5)

O vetor velocidade angular do caminhão-trator é
wT = ψk. (6)
O vetor velocidade angular do semirreboque é
wS =(ψ − φ
)k (7)
A energia cinética do sistema é
T = 12mTvT · vT + 1
2mSvS · vS + 12 wTT [JT ] wT+ 1
2 wST [JS] wS . (8)
Substituindo as equações (4), (5), (6), (7) em (8) temos
T = 12mT
(x2 + y2
)+ 1
2mS
(C2
1 + C22
)+ 1
2IT ψ2 + 1
2IS(ψ − ψ
)2, (9)
onde
C1 = x+ (b+ c) ψ sinψ + d(ψ − φ
)sin (ψ − φ) (10a)
C2 = y − (b+ c) ψ cosψ − d(ψ − φ
)cos (ψ − φ) . (10b)
Derivando a equação (10) temos
C1 = x+ (b+ c) ψ sinψ+ (b+ c) ψ2 cosψ+ d(ψ − φ
)sin (ψ − φ) + d
(ψ − φ
)2cos (ψ − φ)
(11a)
C2 = y− (b+ c) ψ cosψ+ (b+ c) ψ2 sinψ− d(ψ − φ
)cos (ψ − φ) + d
(ψ − φ
)2sin (ψ − φ)
(11b)
As derivadas parciais da energia cinética do sistema (equação (9)) em relação às coor-
denadas generalizadas são
∂T
∂q1= ∂T
∂x= 0 (12a)
∂T
∂q2= ∂T
∂y= 0 (12b)

∂T
∂q3= ∂T
∂ψ= mSC1
[(b+ c) ψ cosψ + d
(ψ − φ
)cos (ψ − φ)
]+ ...
... + mSC2[(b+ c) ψ sinψ + d
(ψ − φ
)sin (ψ − φ)
](12c)
∂T
∂q4= ∂T
∂φ= mSC1
[−d
(ψ − φ
)cos (ψ − φ)
]+mSC2
[−d
(ψ − φ
)sin (ψ − φ)
]. (12d)
As derivadas parciais da energia cinética do sistema em relação às derivadas temporais
das coordenadas generalizadas são
∂T
∂q1= ∂T
∂x= mT x+mSC1 (13a)
∂T
∂q2= ∂T
∂y= mT y +mSC2 (13b)
∂T
∂q3= ∂T
∂ψ= mSC1 [(b+ c) sinψ + d sin (ψ − φ)] + ...
... + mSC2 [− (b+ c) cosψ − d cos (ψ − φ)] + IT ψ + IS(ψ − φ
)(13c)
∂T
∂q4= ∂T
∂φ= mSC1 [−d sin (ψ − φ)] +mSC2 [d cos (ψ − φ)]− IS
(ψ − φ
). (13d)
Derivando as equações (13) em relação ao tempo temos
d
dt
(∂T
∂q1
)= d
dt
(∂T
∂x
)= mT x+mSC1 (14a)
d
dt
(∂T
∂q2
)= d
dt
(∂T
∂y
)= mT y +mSC2 (14b)
d
dt
(∂T
∂q3
)= d
dt
(∂T
∂ψ
)= mSC1 [(b+ c) sinψ + d sin (ψ − φ)] + ...
... + mSC1[(b+ c) ψ cosψ + d
(ψ − φ
)cos (ψ − φ)
]+ ...
... + mSC2 [− (b+ c) cosψ − d cos (ψ − φ)] + ...
... + mSC2[(b+ c) ψ sinψ + d
(ψ − φ
)sin (ψ − φ)
]+ ...
... + IT ψ + IS(ψ − φ
)(14c)

d
dt
(∂T
∂q4
)= d
dt
(∂T
∂φ
)= mSC1 [−d sin (ψ − φ)] +mSC1
[−d
(ψ − φ
)cos (ψ − φ)
]+ ...
... + mSC2 [d cos (ψ − φ)] +mSC2[−d
(ψ − φ
)sin (ψ − φ)
]− ...
... + −IS(ψ − φ
)(14d)
A força no eixo dianteiro é dadas por
FF = Fx,Fex + Fy,Fex, (15)
que pode ser escrita como
FF = [Fx,F cos (ψ + δ)− Fy,F sin (ψ + δ)] i + [Fx,F sin (ψ + δ) + Fy,F cos (ψ + δ)] j. (16)
A força no eixo traseiro é
FR = Fx,Rtx + Fy,Rty (17)
ou
FR = [Fx,R cosψ − Fy,R sinψ] i + [Fx,R sinψ + Fy,R cosψ] j. (18)
A força no eixo do semirreboque é
FM = Fx,Msx + Fy,Msy (19)
ou
FM = [Fx,M cos (ψ − φ)− Fy,M sin (ψ − φ)] i+[Fx,M sin (ψ − φ) + Fy,M cos (ψ − φ)] j. (20)
As forças generalizadas são
Qk =p∑j=1
Fj ·∂pj∂qk
k = 1, 2, 3, 4j = F,R,M
. (21)
Ou seja,

Q1 = FF ·∂pF/O
∂q1+ FR ·
∂pR/O
∂q1+ FM ·
∂pM/O
∂q1(22a)
Q2 = FF ·∂pF/O
∂q2+ FR ·
∂pR/O
∂q2+ FM ·
∂pM/O
∂q2(22b)
Q3 = FF ·∂pF/O
∂q3+ FR ·
∂pR/O
∂q3+ FM ·
∂pM/O
∂q3, (22c)
Q4 = FF ·∂pF/O
∂q4+ FR ·
∂pR/O
∂q4+ FM ·
∂pM/O
∂q4. (22d)
Os pontos de aplicação das forças são localizados por
pF/O = (x+ a cosψ) i + (y + a sinψ) j. (23a)
pR/O = (x− b cosψ) i + (y − b sinψ) j. (23b)
pM/O = [x− (b+ c) cosψ − (d+ e) cos (ψ − φ)] i + ...
... + [y − (b+ c) sinψ − (d+ e) sin (ψ − φ)] j.
(23c)
Logo, as derivadas parciais
∂pF/O
∂q1= ∂pF/O
∂x= i (24a)
∂pF/O
∂q2= ∂pF/O
∂y= j (24b)
∂pF/O
∂q3= ∂pF/O
∂ψ= −a sinψi + a cosψj (24c)
∂pF/O
∂q4= ∂pF/O
∂φ= 0, (24d)
∂pR/O
∂q1= ∂pR/O
∂x= i (25a)
∂pR/O
∂q2= ∂pR/O
∂y= j (25b)
∂pR/O
∂q3= ∂pR/O
∂ψ= b sinψi− b cosψj (25c)
∂pR/O
∂q4= ∂pR/O
∂φ= 0 (25d)

e
∂pM/O
∂q1= ∂pM/O
∂x= i (26a)
∂pM/O
∂q2= ∂pM/O
∂y= j (26b)
∂pM/O
∂q3= ∂pM/O
∂ψ= [(b+ c) sinψ + (d+ e) sin (ψ − φ)] i + ...
... + [− (b+ c) cosψ − (d+ e) cos (ψ − φ)] j
(26c)
∂pM/O
∂q4= ∂pM/O
∂φ= [− (d+ e) sin (ψ − φ)] i + [(d+ e) cos (ψ − φ)] j (26d)
Substituindo as equações (16), (18), (20), (24), (25) e (26) nas equações (22) temos
Q1 = Fx,F cos (ψ + δ) + Fx,R cosψ + Fx,M cos (ψ − φ)− ...
... − Fy,F sin (ψ + δ)− Fy,R sinψ − Fy,M sin (ψ − φ)
(27a)
Q2 = Fx,F sin (ψ + δ) + Fx,R sinψ + Fx,M sin (ψ − φ) + ...
... − Fy,F cos (ψ + δ) + Fy,R cosψ + Fy,M cos (ψ − φ)
(27b)
Q3 = Fx,Fa sin δ + Fx,M (b+ c) sinφ+ ...
... + Fy,Fa cos δ − Fy,Rb− Fy,M [(b+ c) cosφ+ (d+ e)]
(27c)
Q4 = Fy,M (d+ e) (27d)
A formulação de Euler-Lagrange para este sistema é dada por
d
dt
(∂T
∂qk
)− ∂T
∂qk= Qk k = 1, 2, 3, 4, (28)
Substituindo as equações (12), (14) e (27) em (28) temos

mT x+mSC1 = Fx,F cos (ψ + δ) + Fx,R cosψ + Fx,M cos (ψ − φ)− ...
... − Fy,F sin (ψ + δ)− Fy,R sinψ − Fy,M sin (ψ − φ)
(29a)
mT y +mSC2 = Fx,F sin (ψ + δ) + Fx,R sinψ + Fx,M sin (ψ − φ) + ...
... − Fy,F cos (ψ + δ) + Fy,R cosψ + Fy,M cos (ψ − φ)
(29b)
mSC1 [(b+ c) sinψ + d sin (ψ − φ)] +mSC2 [− (b+ c) cosψ − d cos (ψ − φ)] + ...
...+ IT ψ + IS(ψ − φ
)=
Fx,Fa sin δ + Fx,M (b+ c) sinφ+ Fy,Fa cos δ − Fy,Rb− Fy,M [(b+ c) cosφ+ (d+ e)]
(29c)
mSC1 [−d sin (ψ − φ)] +mSC2 [d cos (ψ − φ)]− IS(ψ − φ
)= Fy,M (d+ e) (29d)
Substituindo as equações (11) em (29)
(mT +mS) x+mS [(b+ c) sinψ + d sin (ψ − φ)] ψ −mSd sin (ψ − φ) φ =
Fx,F cos (ψ + δ) + Fx,R cosψ + Fx,M cos (ψ − φ)− ...
...− Fy,F sin (ψ + δ)− Fy,R sinψ − Fy,M sin (ψ − φ)
−mS (b+ c) ψ2 cosψ −mSd(ψ − φ
)2cos (ψ − φ)
(30a)
(mT +mS) y −mS [(b+ c) cosψ + d cos (ψ − φ)] ψ +mSd cos (ψ − φ) φ =
Fx,F sin (ψ + δ) + Fx,R sinψ + Fx,M sin (ψ − φ) + ...
...+ Fy,F cos (ψ + δ) + Fy,R cosψ + Fy,M cos (ψ − φ)
−mS (b+ c) ψ2 sinψ −mSd(ψ − φ
)2sin (ψ − φ)
(30b)

mS [(b+ c) sinψ + d sin (ψ − φ)] x−mS [(b+ c) cosψ + d cos (ψ − φ)] y + ...
...+mS
[(b+ c)2 + 2 (b+ c) d cosφ+ d2
]+ IT + IS
ψ − ...
...−mS
[(b+ c) d cosφ+ d2
]+ IS
φ = ...
...Fx,Fa sin δ + Fx,M (b+ c) sinφ+ Fy,Fa cos δ − Fy,Rb− Fy,M [(b+ c) cosφ+ (d+ e)]− ...
−mS (b+ c) d(ψ − φ
)2sinφ+mS (b+ c) dψ2 sinφ
(30c)
−mSd sin (ψ − φ) x+mSd cos (ψ − φ) y −mS
[d2 + (b+ c) d cosφ
]+ IS
ψ + ...(
mSd2 + IS
)φ = ...
...Fy,M (d+ e)−mS (b+ c) dψ2 sinφ
(30d)
Os estado podem ser escolhidos como
z1 = x (31a)
z2 = y (31b)
z3 = ψ (31c)
z4 = φ (31d)
z5 = x (31e)
z6 = y (31f)
z7 = ψ (31g)
z8 = φ (31h)
Logo, as equações de estado são
z1 = z5 (32a)
z2 = z6 (32b)
z3 = z7 (32c)
z4 = z8 (32d)

(mT +mS) z5 +mS [(b+ c) sin z3 + d sin (z3 − z4)] z7 −mSd sin (z3 − z4) z8 =
Fx,F cos (z3 + δ) + Fx,R cos z3 + Fx,M cos (z3 − z4)− ...
...− Fy,F sin (z3 + δ)− Fy,R sin z3 − Fy,M sin (z3 − z4)
−mS (b+ c) z27 cos z3 −mSd (z7 − z8)2 cos (z3 − z4)
(32e)
(mT +mS) z6 −mS [(b+ c) cos z3 + d cos (z3 − z4)] z7 +mSd cos (z3 − z4) z8 =
Fx,F sin (z3 + δ) + Fx,R sin z3 + Fx,M sin (z3 − z4) + ...
...+ Fy,F cos (z3 + δ) + Fy,R cos z3 + Fy,M cos (z3 − z4)
−mS (b+ c) z27 sin z3 −mSd (z7 − z8)2 sin (z3 − z4)
(32f)
mS [(b+ c) sin z3 + d sin (z3 − z4)] z5 −mS [(b+ c) cos z3 + d cos (z3 − z4)] z6 + ...
...+mS
[(b+ c)2 + 2 (b+ c) d cos z4 + d2
]+ IT + IS
z7 − ...
...−mS
[(b+ c) d cos z4 + d2
]+ IS
z8 = ...
...Fx,Fa sin δ + Fx,M (b+ c) sin z4 + Fy,Fa cos δ − Fy,Rb− Fy,M [(b+ c) cos z4 + (d+ e)]− ...
−mS (b+ c) d (z7 − z8)2 sin z4 +mS (b+ c) dz27 sin z4
(32g)
−mSd sin (ψ − φ) z5 +mSd cos (ψ − φ) z6 −mS
[d2 + (b+ c) d cosφ
]+ IS
z7 + ...(
mSd2 + IS
)z8 = ...
...Fy,M (d+ e)−mS (b+ c) dψ2 sinφ
(32h)
Em muitas ocasiões é conveniente fazer a substituição dos estados x e y por vT e αT. A
relação entre estes pares de estados é
x = vT cos (ψ + αT) (33a)
y = vT sin (ψ + αT) . (33b)
Derivando em relação ao tempo a equação (33) temos

x = vT cos (ψ + αT)− vT(ψ + αT
)sin (ψ + αT) (34a)
y = vT sin (ψ + αT) + vT(ψ + αT
)cos (ψ + αT) . (34b)
Desta forma, substituindo as equações (34) nas equações (30) temos
(mT +mS) cos (ψ + αT) vT − (mT +mS) vT sin (ψ + αT) αT + ...
+mS [(b+ c) sinψ + d sin (ψ − φ)] ψ −mSd sin (ψ − φ) φ =
Fx,F cos (ψ + δ) + Fx,R cosψ + Fx,M cos (ψ − φ)− ...
...− Fy,F sin (ψ + δ)− Fy,R sinψ − Fy,M sin (ψ − φ)
−mS (b+ c) ψ2 cosψ −mSd(ψ − φ
)2cos (ψ − φ) + (mT +mS) vT sin (ψ + αT) ψ
(35a)
(mT +mS) sin (ψ + αT) vT + (mT +mS) vT cos (ψ + αT) αT + ...
−mS [(b+ c) cosψ + d cos (ψ − φ)] ψ +mSd cos (ψ − φ) φ =
Fx,F sin (ψ + δ) + Fx,R sinψ + Fx,M sin (ψ − φ) + ...
...+ Fy,F cos (ψ + δ) + Fy,R cosψ + Fy,M cos (ψ − φ)
−mS (b+ c) ψ2 sinψ −mSd(ψ − φ
)2sin (ψ − φ)− (mT +mS) vT cos (ψ + αT) ψ
(35b)
−mS [(b+ c) sinαT + d sin (αT + φ)] vT −mS [(b+ c) vT cosαT + dvT cos (αT + φ)] αT
...+mS
[(b+ c)2 + 2 (b+ c) d cosφ+ d2
]+ IT + IS
ψ −
mS
[(b+ c) d cosφ+ d2
]+ IS
φ = ...
...Fx,Fa sin δ + Fx,M (b+ c) sinφ+ Fy,Fa cos δ − Fy,Rb− Fy,M [(b+ c) cosφ+ (d+ e)]− ...
−mS (b+ c) d(ψ − φ
)2sinφ+mS (b+ c) dψ2 sinφ+mS [(b+ c) vT cosαT + dvT cos (αT + φ)] ψ
(35c)
mSd sin (αT + φ) vT +mSdvT cos (αT + φ) αT −mS
[d2 + (b+ c) d cosφ
]+ IS
ψ + ...
...+(mSd
2 + IS)φ = ...
...Fy,M (d+ e)−mS (b+ c) dψ2 sinφ−mSdvT cos (αT + φ) ψ
(35d)

Os estados podem ser escolhidos como
x1 = x (36a)
x2 = y (36b)
x3 = ψ (36c)
x4 = φ (36d)
x5 = vT (36e)
x6 = αT (36f)
x7 = ψ (36g)
x8 = φ (36h)
Na forma matricial o sistema da equação (35) pode ser escrito como
M (x) x = f (x,u) , (37)
onde o vetor de estados é
x =
x1
x2
x3
x4
x5
x6
x7
x8
(38)
e o vetor de entradas é

u =
δ
Fx,F
Fx,R
Fx,M
Fy,F
Fy,R
Fy,M
. (39)
A matriz M é dada por
M =
1 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 0 0 00 0 0 0 M55 M56 M57 M58
0 0 0 0 M65 M66 M67 M68
0 0 0 0 M75 M76 M77 M78
0 0 0 0 M85 M86 M87 M88
, (40)
onde os elementros são
M55 = (mT +mS) cos (ψ + αT) (41a)
M56 = − (mT +mS) vT sin (ψ + αT) (41b)
M57 = mS [(b+ c) sinψ + d sin (ψ − φ)] (41c)
M58 = −mSd sin (ψ − φ) (41d)
M65 = (mT +mS) sin (ψ + αT) (41e)
M66 = (mT +mS) vT cos (ψ + αT) (41f)
M67 = −mS [(b+ c) cosψ + d cos (ψ − φ)] (41g)
M68 = mSd cos (ψ − φ) (41h)
M75 = −mS [(b+ c) sinαT + d sin (αT + φ)] (41i)
M76 = −mS [(b+ c) vT cosαT + dvT cos (αT + φ)] (41j)

M77 = mS
[(b+ c)2 + 2 (b+ c) d cosφ+ d2
]+ IT + IS (41k)
M78 = −mS
[(b+ c) d cosφ+ d2
]+ IS (41l)
M85 = mSd sin (αT + φ) (41m)
M86 = mSdvT cos (αT + φ) (41n)
M87 = −mS
[d2 + (b+ c) d cosφ
]+ IS (41o)
M88 =(mSd
2 + IS)
(41p)
As funções são dadas por
f =
vT cos (ψ + αT)vT sin (ψ + αT)
ψ
φ
f5
f6
f7
f8
, (42)
onde
f5 = Fx,F cos (ψ + δ) + Fx,R cosψ + Fx,M cos (ψ − φ)− ...
... − Fy,F sin (ψ + δ)− Fy,R sinψ − Fy,M sin (ψ − φ)− ...
... − mS (b+ c) ψ2 cosψ −mSd(ψ − φ
)2cos (ψ − φ) + (mT +mS) vT sin (ψ + αT) ψ
(43a)
f6 = Fx,F sin (ψ + δ) + Fx,R sinψ + Fx,M sin (ψ − φ) + ...
... + Fy,F cos (ψ + δ) + Fy,R cosψ + Fy,M cos (ψ − φ)
... − mS (b+ c) ψ2 sinψ −mSd(ψ − φ
)2sin (ψ − φ)− (mT +mS) vT cos (ψ + αT) ψ
(43b)

f7 = Fx,Fa sin δ + Fx,M (b+ c) sinφ+ Fy,Fa cos δ − ...
... − Fy,Rb− Fy,M [(b+ c) cosφ+ (d+ e)]− ...
... − mS (b+ c) d(ψ − φ
)2sinφ+mS (b+ c) dψ2 sinφ+ ...
... + mS [(b+ c) vT cosαT + dvT cos (αT + φ)] ψ
(43c)
f8 = Fy,M (d+ e)−mS (b+ c) dψ2 sinφ−mSdvT cos (αT + φ) ψ. (43d)
Portanto, o modelo não linear de veículo articulado é dado pelas equações (37), (38),
(39), (40), (41), (42) e (43).
0.2 MODELO LINEARIZADO
A equação não linear (37) pode ser linearizada e escrita na forma matricial
Ex = Ax + Bu. (44)
A linearização deste sistema pode ser feita para um veículo se movimentando em linha
reta com uma determinada velocidade vT > 0. Neste caso, os estados no ponto de operação são
dados por
x1,op = xop =? (45a)
x2,op = yop =? (45b)
x3,op = ψop = 0 (45c)
x4,op = φop = 0 (45d)
x5,op = vT,op = vT,0 (45e)
x6,op = αT,op = 0 (45f)
x7,op = ψop = 0, (45g)
x8,op = φop = 0. (45h)
OBS: Os estados x e y não influenciam a dinâmica do sistema.
O vetor do ponto de operação dos estados é

xop =
x1,op
x2,op
x3,op
x4,op
x5,op
x6,op
x7,op
x8,op
. (46)
Neste ponto de operação dos estados, o ponto de operação da derivada dos estados é
dada por
x1,op = xop = vT,0 (47a)
x2,op = yop = 0 (47b)
x3,op = ψop = 0 (47c)
x4,op = φop = 0 (47d)
x5,op = vT,op = 0 (47e)
x6,op = αT,op = 0 (47f)
x7,op = ψop = 0, (47g)
x8,op = φop = 0. (47h)
O vetor do ponto de operação da derivada dos estados é
xop =
x1,op
x2,op
x3,op
x4,op
x5,op
x6,op
x7,op
x8,op
. (48)

O ponto de operação das entradas é
δop = 0 (49a)
Fx,F,op = 0 (49b)
Fx,R,op = 0 (49c)
Fx,M,op = 0 (49d)
Fy,F,op = 0 (49e)
Fy,R,op = 0. (49f)
Fy,M,op = 0. (49g)
O vetor do ponto de operação das entradas é
uop =
δop
Fx,F,op
Fx,R,op
Fy,F,op
Fy,R,op
. (50)
Expandindo em série de Taylor a equação (37) e truncando nos termos de primeira ordem
temos
∇g (xop, xop,uop)
x− xopx− xopu− uop
= ∇f (xop, xop,uop)
x− xopx− xopu− uop
, (51)
onde

g =
g1
g2
g3
g4
g5
g6
g7
g8
. (52)
é o lado esquerdo da equação (37), enquanto que o lado direito é dado por
f =
f1f2f3f4f5f6f7f8
. (53)
O jacobiano das funções (52) e (53) é
∇g =
∂g1∂x
. . . ∂g1∂x
. . . ∂g1∂δ
. . . ∂g1∂Fy,R
......
......
∂g8∂x
. . . ∂g8∂x
. . . ∂g8∂δ
. . . ∂g8∂Fy,R
(54a)
∇f =
∂f1∂x
. . . ∂f1∂x
. . . ∂f1∂δ
. . . ∂f1∂Fy,R
......
......
∂f8∂x
. . . ∂f8∂x
. . . ∂f8∂δ
. . . ∂f8∂Fy,R
. (54b)
Logo, as equações de movimento linearizadas são dadas por
(mT +mS)vT = Fx,F + Fx,R + Fx,M (55a)
(mT +mS)vT,0αT−mS(b+ c+d)ψ+mSdφ = Fy,F +Fy,R +Fy,M− (mS +mT )vT,0ψ (55b)

−mS(b+ c+ c)vT,0αT +[IT + IS +mS(b+ c+ d)2
]ψ −
[IS +mS(d2 + (b+ c)d)
]φ =
Fy,Fa− Fy,Rb− Fy,M(b+ c+ d+ e) +mS(b+ c+ d)vT,0ψ
(55c)
mSdvT,0αT− (IS +mS(d2 + (b+ c)d))ψ+ (mSd2 + IS)φ = Fy,M(d+ e)−mSdvT,0ψ (55d)
É possível notar que quando o somatório das forças longitudinais é zero a velocidade vT
se mantém constante.
As equações de estado são dadas por
x1 = x5 (56a)
x2 = (x3 + x6)vT,0 (56b)
x3 = x7 (56c)
x4 = x8 (56d)
(mS +mT )x5 = FxF + FxM + FxR (56e)
(mT +mS)vT,0x6−mS(b+c+d)x7 +mSdx8 = Fy,F +Fy,R +Fy,M− (mS +mT )vT,0x7 (56f)
−mS(b+ c+ c)vT,0x6 +[IT + IS +mS(b+ c+ d)2
]x7 −
[IS +mS(d2 + (b+ c)d)
]x8 =
Fy,Fa− Fy,Rb− Fy,M(b+ c+ d+ e) +mS(b+ c+ d)vT,0x
(56g)
mSdvT,0x6− (IS +mS(d2 + (b+ c)d))x7 + (mSd2 + IS)x8 = Fy,M(d+ e)−mSdvT,0x7 (56h)
Escrevendo a equação (56) na forma matricial da pela equação (44) a matriz E é dada
por

E =
1 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 0 0 00 0 0 0 E55 E56 E57 E58
0 0 0 0 E65 E66 E67 E68
0 0 0 0 E75 E76 E77 E78
0 0 0 0 E85 E86 E87 E88
, (57)
onde os elementros são
E55 = (mT +mS) (58a)
E56 = 0 (58b)
E57 = 0 (58c)
E58 = 0 (58d)
E65 = 0 (58e)
E66 = (mS +mT ) vT,0 (58f)
E67 = −mS (b+ c+ d) (58g)
E68 = dmS (58h)
E75 = 0 (58i)
E76 = −mSvT,0 (b+ c+ d) (58j)
E77 = IT + IS +mS(b+ c+ d)2 (58k)
E78 = −IS −mS
[d2 + (b+ c)d
](58l)
E85 = 0 (58m)
E86 = dmSvT,0 (58n)
E87 = −IS −mS
[d2 + (b+ c)d
](58o)
E88 = mSd2 + IS (58p)

A matriz dinâmica do sistema é dada por
A =
0 0 0 0 1 0 0 00 0 vT,0 0 0 vT,0 0 00 0 0 0 0 0 1 00 0 0 0 0 0 0 10 0 0 0 0 0 0 00 0 0 0 0 0 −(mS +mT )vT,0 00 0 0 0 0 0 mS(b+ c+ d)vT,0 00 0 0 0 0 0 −mSdvT,0 0
(59)
B =
0 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 1 1 1 0 0 00 0 0 0 1 1 10 0 0 0 a −b −(b+ c+ d+ e)0 0 0 0 0 0 d+ e
(60)
Portanto, o modelo linear de veículo articulado é dado pela equação (44) com as matrizes
dadas pelas equações (57), (59) e (60).
0.2.1 Ângulos de deriva
A velocidade no eixo dianteiro é dada por
vF = vT + wT ∧ rF/T, (61)
onde rF/T é o vetor posição do ponto F em relação ao ponto T. Logo,
vF =(x− aψ sinψ
)i +
(y + aψ cosψ
)j. (62)
A velocidade no eixo traseiro é
vR = vT + wT ∧ rR/T, (63)

onde rR/T é o vetor posição do ponto R em relação ao ponto T. Logo,
vR =(x+ bψ sinψ
)i +
(y − bψ cosψ
)j (64)
De maneira análoga, a velocidade do eixo do semirreboque é
vM =[x+ (b+ c) ψ sinψ + (d+ e)
(ψ − φ
)sin (ψ − φ)
]i + ...
... +[y − (b+ c) ψ cosψ − (d+ e)
(ψ − φ
)cos (ψ − φ)
]j.
(65)
Utilizando as equações (62), (64) e (65), os ângulos de deriva podem ser escritos como
αF = arctan(y + aψ cosψx− aψ sinψ
)− (δ + ψ) (66a)
αR = arctan(y − bψ cosψx+ bψ sinψ
)− ψ (66b)
αR = arctan y − (b+ c) ψ cosψ − (d+ e)
(ψ − φ
)cos (ψ − φ)
x+ (b+ c) ψ sinψ + (d+ e)(ψ − φ
)sin (ψ − φ)
− (ψ − φ) (66c)
Realizando a mudança de varíaveis proposta na equação (33), os ângulos de deriva pas-
sam a ser
αF = arctan(vT sin (ψ + αT) + aψ cosψvT cos (ψ + αT)− aψ sinψ
)− (δ + ψ) (67a)
αR = arctan(vT sin (ψ + αT)− bψ cosψvT cos (ψ + αT) + bψ sinψ
)− ψ (67b)
αM = (67c)
Simplificando, temos que
αF = arctan(vT sinαT + aψ
vT cosαT
)− δ (68a)
αR = arctan(vT sinαT − bψvT cosαT
)(68b)
αM = (68c)

Linearizando em torno do ponto de operação dado pelas equações (45), (47) e (49) temos
αF,lin = αT + a
vT,0ψ − δ (69a)
αF,lin = αT −b
vT,0ψ. (69b)
αM,lin = (69c)
0.3 SIMULAÇÃO
0.4 CONCLUSÃO
0.5 INCLUINDO PNEU LINEAR
Linearizando o valor do dos ângulos de deriva em (68) no mesmo ponto de operação
temos
Supondo uma lei de força linear para os pneu temos
Fy,F = −KFαF = −KFαT −aKF
vT,0ψ +KFδ (70a)
Fy,R = −KRαR = −KRαT + bKR
vT,0ψ (70b)
Substituir as equações (70) nas equações linearizadas em (??) temos
f1,lin = x = vT (71a)
f2,lin = y = vT,0 (ψ + αT) (71b)
f3,lin = ψ = ψ (71c)
f4,lin = vT = Fx,F + Fx,RmT
(71d)
f5,lin = αT = −KF +KR
mTvT,0αT −
mTvT,0 + aKF−bKRvT,0
mTvT,0ψ + KF
mTvT,0δ (71e)
f6,lin = ψ = −aKF − bKR
ITαT −
a2KF + b2KR
ITvT,0ψ + aKF
ITδ (71f)
Na forma matricial

x = Ax + Bu (72)
Ou ainda
x
y
ψ
vT
αT
ψ
=
0 0 0 1 0 00 0 vT,0 0 vT,0 00 0 0 0 0 10 0 0 0 0 0
0 0 0 0 −KF+KRmT vT,0
−mT vT,0+ aKF−bKR
vT,0mT vT,0
0 0 0 0 −aKF−bKRIT
−a2KF+b2KRIT vT,0
x
y
ψ
vT
αT
ψ
+
0 0 00 0 00 0 00 1
mT
1mT
KFmT vT,0
0 0aKFIT
0 0
δ
Fx,F
Fx,R
(73)

REFERÊNCIAS