
Apuntes de Control Automáticodea.unsj.edu.ar/control2b/Apuntes de Control.pdf · 3.2...
95
Apuntes de Control Automático θ sol θ 2 θ 1 θ cel v c V 1 V 2 v out
Transcript of Apuntes de Control Automáticodea.unsj.edu.ar/control2b/Apuntes de Control.pdf · 3.2...
Apuntes de Control Automático
θsol
θ2 θ1
θcel
vc
V1
V2 vout
Apuntes: 543 444 ii
Copyright ©por Prof. José R. Espinoza
Tabla de contenidos.
PRÓLOGO ................................................................................................................................................. IV
NOMENCLATURA ....................................................................................................................................... V
ABREVIACIONES ..................................................................................................................................... VIII
1 INTRODUCCIÓN A LOS SISTEMAS DE CONTROL. .................................................................................1 1.1 Ejemplos. ...................................................................................................................................1 1.2 Terminología y Definiciones. ....................................................................................................4 1.3 Ejemplos. ...................................................................................................................................5 1.4 Otros Controladores..................................................................................................................8 1.5 Clasificación de Sistemas de Control......................................................................................12 1.6 Alcances del Curso 543 444....................................................................................................13
2 ESTADO ESTACIONARIO EN SISTEMAS REALIMENTADOS.................................................................14 2.1 Introducción. ...........................................................................................................................14 2.2 Efectos de la Realimentación. .................................................................................................14 2.3 Estabilización utilizando Realimentación. ..............................................................................21 2.4 Errores en Estado Estacionario. .............................................................................................22 2.5 Diseño de Controladores. .......................................................................................................25
3 RÉGIMEN TRANSIENTE EN SISTEMAS REALIMENTADOS...................................................................27 3.1 Comportamiento Transitorio de Sistemas de Primer Orden...................................................27 3.2 Comportamiento Transitorio de Sistemas de Segundo Orden. ...............................................30 3.3 Especificaciones en el Dominio de la Frecuencia . ................................................................33 3.4 Polos Dominantes y Reducción de Orden...............................................................................35 3.5 Sistemas con Retardo. .............................................................................................................37
4 LUGAR GEOMÉTRICO DE LAS RAÍCES. .............................................................................................40 4.1 Introducción. ...........................................................................................................................40 4.2 El Método del L.G.R................................................................................................................42 4.3 Reglas Adicionales para la Construcción del L.G.R...............................................................44 4.4 Análisis de Sistemas y Ejemplos de Sintonización. .................................................................50
5 CRITERIO DE NYQUIST.....................................................................................................................55 5.1 Introducción. ...........................................................................................................................55 5.2 Criterio de Routh-Hurwitz.......................................................................................................56 5.3 Criterio de Nyquist. .................................................................................................................60
6 DISEÑO Y COMPENSACIÓN DE SISTEMAS DE CONTROL....................................................................71 6.1 Introducción. ...........................................................................................................................71 6.2 Compensación en Adelanto. ....................................................................................................71 6.3 Compensación en Atraso.........................................................................................................75 6.4 Compensación Adelanto-Atraso..............................................................................................80 6.5 Compensador P.I.D.................................................................................................................80
BIBLIOGRAFÍA ...........................................................................................................................................85

Apuntes: 543 444 iii
Copyright ©por Prof. José R. Espinoza
ÍNDICE ALFABÉTICO..................................................................................................................................86
Apuntes: 543 444 iv
Copyright ©por Prof. José R. Espinoza
Prólogo. El curso "Control Automático" es obligatorio para alumnos de pre-grado de las carreras de Ingeniería Civil Eléctrica y Electrónica de la Universidad de Concepción. Este ramo pertenece al plan de asignaturas orientadas al Área de Control Automático del Departamento de Ingeniería Eléctrica en el cual se entregan herramientas de análisis para sistemas lineales, dinámicos e invariantes en el tiempo tipo SISO (una entrada – una salida). Esta asignatura es una aplicación natural de los temas y herramientas revisadas en el curso “Sistemas Lineales Dinámicos”. Los tópicos revisados en este curso permiten analizar sistemas lineales, con énfasis en estructuras realimentadas puesto que representan la mayoría de las encontradas en la naturaleza y las implementadas por el hombre. En particular, en este curso se abordan temas como el análisis en estado estacionario y dinámico de sistemas lineales que se caracterizan por tener una entrada y una salida, también se introducen herramientas nuevas como son el Lugar Geométrico de las Raíces, y el Criterio de Nyquist. Finalmente, se revisa el diseño de controladores utilizando el Lugar Geométrico de las Raíces, el Diagramas de Bode, y el Diagrama de Nyquist. El lector debe tener dominio de los temas entregados en los cursos de Sistemas Lineales Dinámicos y Mecánica para avanzar fluidamente en los tópicos de este texto. Además, un holgado manejo de programas de simulación es definitivamente necesario para seguir los ejemplos del texto. Se recomienda, MatLabTM y/o MathCad TM. El documento fue enteramente digitado en Word for Windows de MicroSoftTM y los ejemplos y ejercicios desarrollados en MatLabTM y/o MathCad TM. Las correcciones y comentarios al contenido y presentación de este documento, son bienvenidos en cualquiera de las direcciones indicadas más abajo.
Dr. José R. Espinoza
Depto. de Ingeniería Eléctrica, of. 220 Facultad de Ingeniería Universidad de Concepción Casilla 160-C, Correo 3 Concepción, CHILE Tel: +56 41 203512 Fax: +56 41 246999 e-mail: [email protected] web: http://www.die.udec.cl/~jespinoz/
Apuntes: 543 444 v
Copyright ©por Prof. José R. Espinoza
Nomenclatura. Matrices
A : matriz de parámetros de dimensión n·n. B : matriz de parámetros de dimensión n·p. C : matriz de parámetros de dimensión q·n. D : matriz de parámetros de dimensión q·p. E : matriz de parámetros de dimensión n·m. F : matriz de parámetros de dimensión q·m. T : matriz de transformación de dimensión de n·n. AT : matriz de parámetros transformada mediante T de dimensión n·n. AT = TAT-1 BT : matriz de parámetros transformada mediante T de dimensión n·p. BT = TB CT : matriz de parámetros transformada mediante T de dimensión q·n. CT = CT-1 DT : matriz de parámetros transformada mediante T de dimensión q·p. DT = D ET : matriz de parámetros transformada mediante T de dimensión n·m. ET = TE FT : matriz de parámetros transformada mediante T de dimensión q·m. FT = F Tabc-αβ0 : matriz de transformación de ejes abc a αβ0, dimensión 3·3. Tαβ0-abc : matriz de transformación de ejes αβ0 a abc, dimensión 3·3. Tαβ0-dq0 : matriz de transformación de ejes αβ0 a dq0, dimensión 3·3. Tdq0-αβ0 : matriz de transformación de ejes dq0 a αβ0, dimensión 3·3. Tabc-dq0 : matriz de transformación de ejes abc a dq0, dimensión 3·3. Tdq0-abc : matriz de transformación de ejes dq0 a abc, dimensión 3·3. H(s) : matriz de transferencia. H(s) = C(sI - A)-1B + D.
)(ˆ sH : matriz de transferencia inversa. )(ˆ sH = H-1(s). H(s)H : matriz conjugada transpuesta de H(s). H(s)H = (H(s)*)T. C : matriz de controlabilidad. O : matriz de observabilidad. L(s) : matriz de transferencia en L.D. Φ(t) : matriz de transición. AdjP(s) : matriz adjunta de la matriz P(s). ℜeX : matriz parte real de la matriz X. ℑmX : matriz parte imaginaria de la matriz X. Vectores
x : vector de n variables de estados, x = [x1 x2 ··· xn]T u : vector de p variables de entrada, u = [u1 u2 ··· up]T y : vector de q variables de salida, y = [y1 y2 ··· yq]T p : vector de m perturbaciones, p = [p1 p2 ··· pm]T x : vector de n variables de estados, x = [ 1x 2x ··· nx ]T (estimación de x). y : vector de q variables de estados, y = [ 1y 2y ··· qy ]T (estimación de y). x~ : vector de n variables de estados, x~ = [ 1
~x 2~x ··· nx~ ]T (error de estimación de x~ = x - x ).
xabc : vector de tres variables de estados, xabc = [xa xb xc]T (ejes estacionarios abc). xαβ0 : vector de tres variables de estados, xαβ0 = [xα xβ x0]T (ejes estacionarios αβ0). xdq0 : vector de tres variables de estados, xdq0 = [xd xq x0]T (ejes rotatorios dq0). x0 : condición inicial del vector de estados, x0 = [x10 x20 ··· xn0]T

Apuntes: 543 444 vi
Copyright ©por Prof. José R. Espinoza
xo : vector de estados en el punto de operación, xo = [x1o x2o ··· xno]T uo : vector de entradas en el punto de operación, uo = [u1o u2o ··· upo]T yo : vector de salidas en el punto de operación, yo = [y1o y2o ··· yqo]T yd : vector deseado (referencia) de q variables de salida, yd = [y1d y2d ··· yqd]T po : vector de perturbaciones en el punto de operación, po = [p1o p2o ··· pqo]T ∆x : variación del vector de estados x en torno a xo, ∆x = [∆x1 ∆x2 ··· ∆xn]T ∆u : variación del vector de entradas u en torno a uo, ∆u = [∆u1 ∆u2 ··· ∆up]T ∆y : variación del vector de salidas y en torno a yo, ∆y = [∆y1 ∆y2 ··· ∆yq]T ∆p : variación del vector de perturbaciones p en torno a po, ∆p = [∆p1 ∆p2 ··· ∆pq]T x(s) : Laplace de x, x(s) = [x1(s) x2(s) ··· xn(s)]T u(s) : Laplace de u, u(s) = [u1(s) u2(s) ··· up(s)]T y(s) : Laplace de y, y(s) = [y1(s) y2(s) ··· yp(s)]T p(s) : Laplace de p, p(s) = [p1(s) p2(s) ··· pp(s)]T vk : k-ésimo vector propio de A. wk : k-ésimo vector propio de AT. vk
* : conjugado del k-ésimo vector propio de A. xec : vector de estados para entrada cero. xci : vector de estados para c.i. nulas. yec : vector de salidas para entrada cero. yci : vector de salidas para c.i. nulas. ck
T : k-ésima fila de la matriz C. bk
T : k-ésima columna de la matriz B. Escalares
∇V(x) : gradiente de la función V(x). ∇V(x) = ∂V(x)/∂x. xk : k-ésima variable de estado. dxk/dt = kx& : derivada de la k-ésima variable de estado. ak : k-ésimo coeficiente del polinomio característico de A. λk : k-ésimo valor propio de A. λk
* : conjugado del k-ésimo valor propio de A. λij : ganancia relativa entre la entrada i-ésima y la salida j-ésima. l(s) : función de transferencia en L.D. dij : elemento ij de la matriz D. hij(s) : elemento ij de la matriz H(s).
)(ˆ shij : elemento ij de la matriz )(ˆ sH = H-1(s). rangoP(s) : rango de la matriz P(s). detP(s) : determinante de la matriz P(s). trP(s) : traza de la matriz P(s). maxijwijl : máximo elemento de la matriz Wl. u(t) : entrada escalón. || e || : norma del elemento e. σl(A) : l-ésimo valor singular de A. σ (A) : máximo valor singular de A. σ (A) : mínimo valor singular de A. ρ(A) : radio espectral de A. γ(A) : número de condición de A. V(x) : función de Lyapunov.
Apuntes: 543 444 vii
Copyright ©por Prof. José R. Espinoza
Ω : vecindad en el espacio de estados de x. G : conjunto invariante. R : conjunto invariante subconjunto de G. ess : error en estado estacionario. δ : banda de asentamiento. ts : tiempo de asentamiento.
Apuntes: 543 444 viii
Copyright ©por Prof. José R. Espinoza
Abreviaciones. Mayúsculas
L.A. : lazo abierto. L.C. : lazo cerrado. L.D. : lazo directo. L.I.T. : lineal invariante en el tiempo. S.P.I. : semi-plano izquierdo. S.P.D. : semi-plano derecho. F. de T. : función de transferencia. F.D. : función descriptora. M. de T. : matriz de transferencia. B.W. : ancho de banda. E.S. : entrada/salida. S.S. : estado estacionario. SISO : sistema de una entrada y una salida (single input single output). MIMO : sistema de varias entradas y varias salidas (multiple inputs multiple outputs). L.G.R. : lugar geométrico de las raíces. P.I.D. : controlador proporcional integral derivativo. S.P. : sobrepaso. M.G. : margen de ganancia. M.F. : margen de fase. FCD : forma canónica diagonal. FCC : forma canónica controlable. FCO : forma canónica observable. FCJ : forma canónica de Jordan. Minúsculas
c.i. : condiciones iniciales. l.i. : linealmente independiente. l.d. : linealmente dependiente. c.c. : corriente continua (en inglés es d.c.). c.a. : corriente alterna (en inglés es a.c.).
Apuntes: 543 444 1
Copyright ©por Prof. José R. Espinoza
1 Introducción a los Sistemas de Control.
En este capítulo se introduce el concepto de control como una necesidad fundamental para conseguir determinados objetivos en los sistemas físicos. Especial énfasis se da a las estructuras realimentadas y a las pre-alimentadas. Se muestra que la mayoría de las realidades físicas funcionan en forma natural en estructuras realimentadas y que por tanto una gran parte de este curso se orienta a su análisis y diseño. También se revisa la terminología inherente a sistemas de control. Finalmente, se indican los alcances del curso en el contexto más general de los sistemas de control.
1.1 Ejemplos.
A continuación se revisan a una variada gama de ejemplos que ilustran la utilización de estructuras de control en forma natural. Además se muestra que el ser humano ha incluido esta alternativa de control para conseguir objetivos específicos desde siempre.
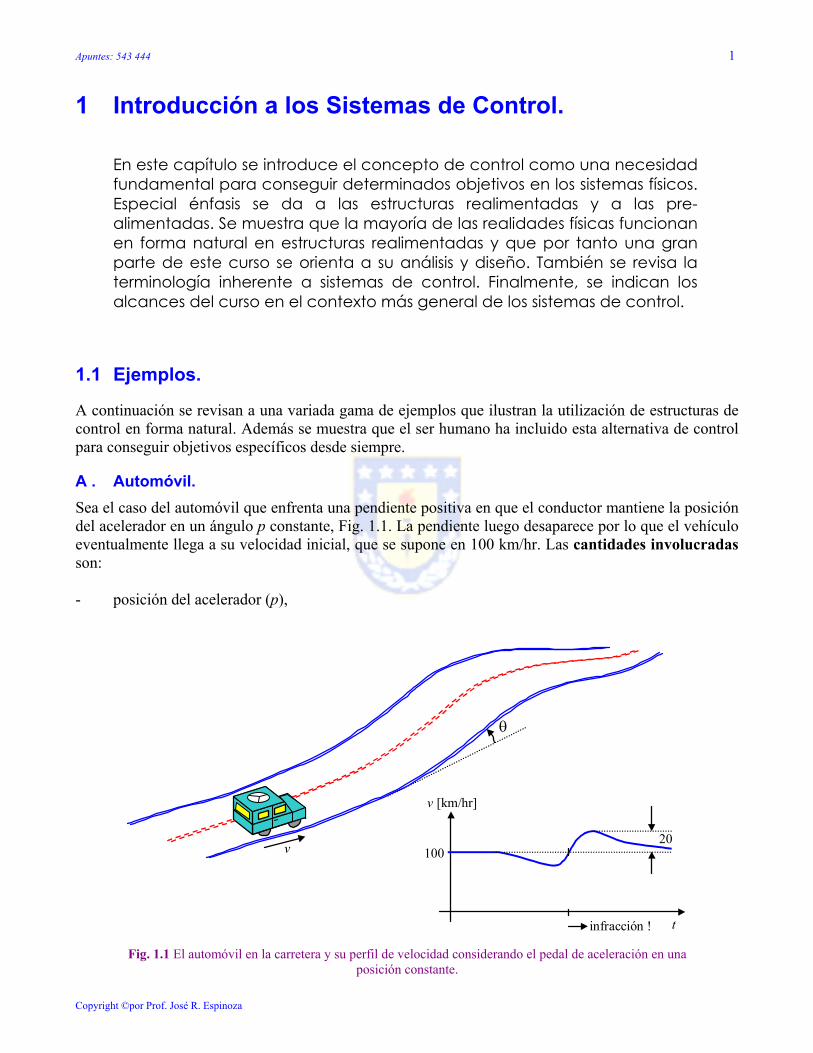
A . Automóvil. Sea el caso del automóvil que enfrenta una pendiente positiva en que el conductor mantiene la posición del acelerador en un ángulo p constante, Fig. 1.1. La pendiente luego desaparece por lo que el vehículo eventualmente llega a su velocidad inicial, que se supone en 100 km/hr. Las cantidades involucradas son: - posición del acelerador (p),
v
t
100
infracción !
v [km/hr]
θ
20
Fig. 1.1 El automóvil en la carretera y su perfil de velocidad considerando el pedal de aceleración en una posición constante.
Apuntes: 543 444 2
Copyright ©por Prof. José R. Espinoza
- velocidad del automóvil (v), - pendiente del camino (θ), - peso del vehículo (m), - ancho de los neumáticos (w), - velocidad del viento en contra (V), - cc del vehículo (cc), - tipo de bencina (tv), - ... Las cantidades involucradas es pueden clasificar de la siguiente manera: - v: cantidad a controlar, - p: cantidad a manipular, - θ, m¸ V: perturbaciones que modifican v pero que
no son manipulables, - w, cc, tv: parámetros que no cambian con t y que
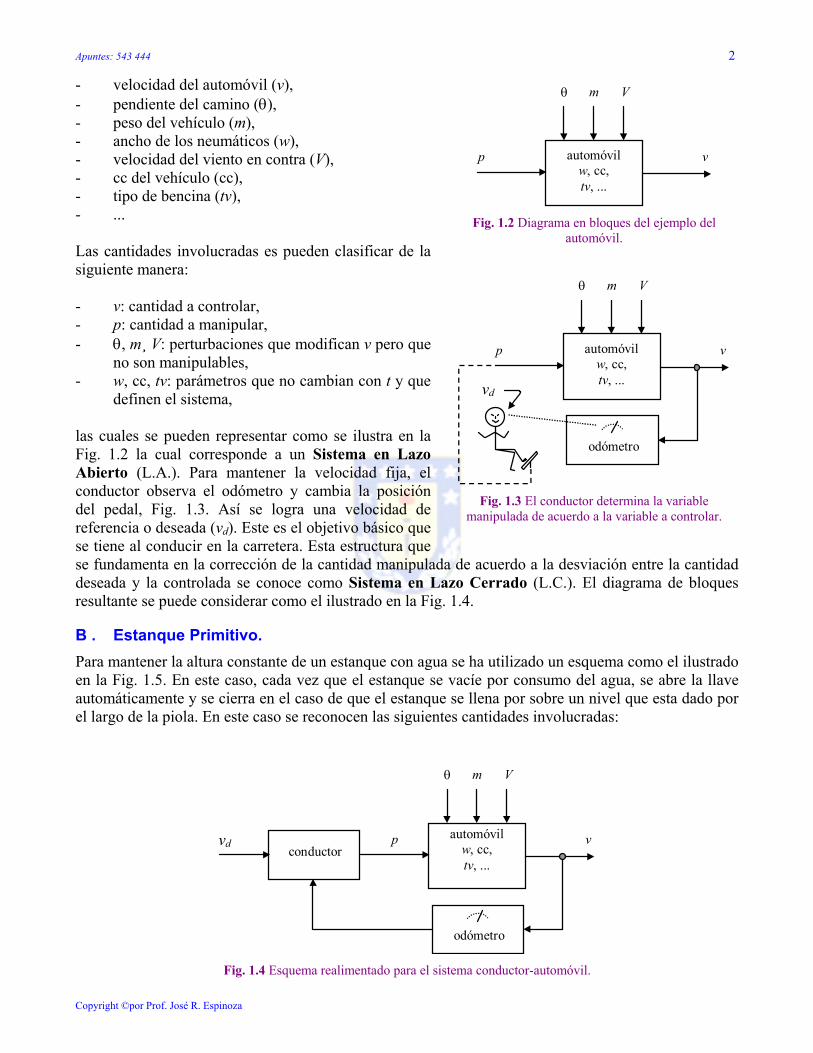
definen el sistema, las cuales se pueden representar como se ilustra en la Fig. 1.2 la cual corresponde a un Sistema en Lazo Abierto (L.A.). Para mantener la velocidad fija, el conductor observa el odómetro y cambia la posición del pedal, Fig. 1.3. Así se logra una velocidad de referencia o deseada (vd). Este es el objetivo básico que se tiene al conducir en la carretera. Esta estructura que se fundamenta en la corrección de la cantidad manipulada de acuerdo a la desviación entre la cantidad deseada y la controlada se conoce como Sistema en Lazo Cerrado (L.C.). El diagrama de bloques resultante se puede considerar como el ilustrado en la Fig. 1.4.
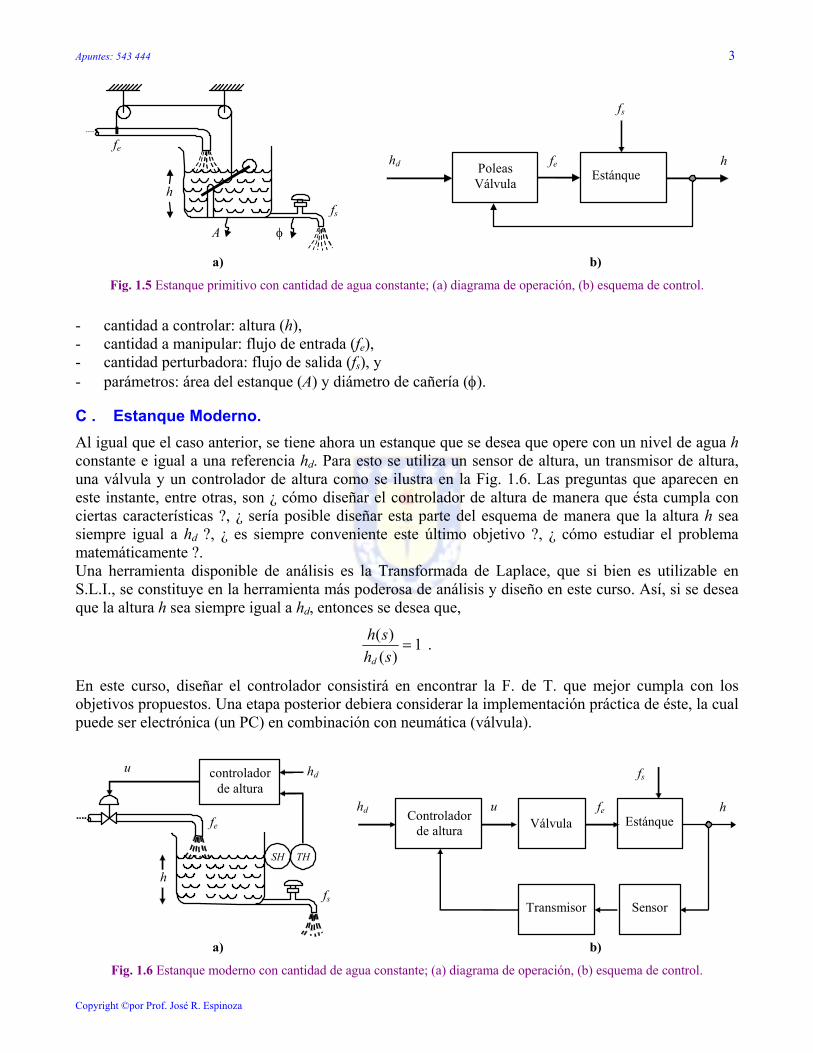
B . Estanque Primitivo. Para mantener la altura constante de un estanque con agua se ha utilizado un esquema como el ilustrado en la Fig. 1.5. En este caso, cada vez que el estanque se vacíe por consumo del agua, se abre la llave automáticamente y se cierra en el caso de que el estanque se llena por sobre un nivel que esta dado por el largo de la piola. En este caso se reconocen las siguientes cantidades involucradas:
θ m V
p vautomóvilw, cc,tv, ...
Fig. 1.2 Diagrama en bloques del ejemplo del
automóvil.
vd
odómetro
θ m V
p vautomóvilw, cc,tv, ...
Fig. 1.3 El conductor determina la variable
manipulada de acuerdo a la variable a controlar.
odómetro
conductorvd
θ m V
p vautomóvilw, cc,tv, ...
Fig. 1.4 Esquema realimentado para el sistema conductor-automóvil.
Apuntes: 543 444 3
Copyright ©por Prof. José R. Espinoza
- cantidad a controlar: altura (h), - cantidad a manipular: flujo de entrada (fe), - cantidad perturbadora: flujo de salida (fs), y - parámetros: área del estanque (A) y diámetro de cañería (φ).
C . Estanque Moderno. Al igual que el caso anterior, se tiene ahora un estanque que se desea que opere con un nivel de agua h constante e igual a una referencia hd. Para esto se utiliza un sensor de altura, un transmisor de altura, una válvula y un controlador de altura como se ilustra en la Fig. 1.6. Las preguntas que aparecen en este instante, entre otras, son ¿ cómo diseñar el controlador de altura de manera que ésta cumpla con ciertas características ?, ¿ sería posible diseñar esta parte del esquema de manera que la altura h sea siempre igual a hd ?, ¿ es siempre conveniente este último objetivo ?, ¿ cómo estudiar el problema matemáticamente ?. Una herramienta disponible de análisis es la Transformada de Laplace, que si bien es utilizable en S.L.I., se constituye en la herramienta más poderosa de análisis y diseño en este curso. Así, si se desea que la altura h sea siempre igual a hd, entonces se desea que,
1)()(
=shsh
d .
En este curso, diseñar el controlador consistirá en encontrar la F. de T. que mejor cumpla con los objetivos propuestos. Una etapa posterior debiera considerar la implementación práctica de éste, la cual puede ser electrónica (un PC) en combinación con neumática (válvula).
fs
fe
h
A φ
fs
fe hEstánque
hd PoleasVálvula
a) b)
Fig. 1.5 Estanque primitivo con cantidad de agua constante; (a) diagrama de operación, (b) esquema de control.
fs
fe
controlador de altura
SH TH
hd
h
u
fs
fe hEstánqueVálvula
SensorTransmisor
Controlador de altura
hd u
a) b)
Fig. 1.6 Estanque moderno con cantidad de agua constante; (a) diagrama de operación, (b) esquema de control.
Apuntes: 543 444 4
Copyright ©por Prof. José R. Espinoza
1.2 Terminología y Definiciones.
Def.: La variable controlada es la cantidad que se mide y controla. (h)
Def.: La variable manipulada es la cantidad modificada a fin de afectar la variable controlada. (Fe)
Def.: Las perturbaciones son cantidades que afectan adversamente la variable controlada, y que no pueden ser manipuladas directamente. (fs)
Def.: Control significa medir el valor de la variable controlada y aplicar la variable manipulada tal que se corrige o limita la variable de salida a un valor deseado.
Def.: La variable de salida es la o las variables controladas o función de ellas que se desea limitar dentro de márgenes pre-establecidos durante régimen transiente y/o estacionario. (h)
Def.: Un sistema es una combinación de componentes que actúan conjuntamente y cumplen determinado objetivo. Los hay físicos, biológicos, económicos, etc. y combinación de ellos. (estanque)
Def.: Proceso es una operación natural o artificial caracterizado por una serie de cambios graduales, progresivamente continuos que consisten en una serie de acciones controladas o movimientos dirigidos sistemáticamente hacia determinado resultado o fin. (producción de papel)
Def.: Una planta es un equipo cuyo objetivo es realizar una operación determinada. (estanque, poleas)
Def.: Un sistema de control realimentado es aquel que tiende a mantener una relación pre-establecida entre la salida y la referencia, comparándolas y utilizando la diferencia como medio de control. (también conocido como sistema de control en L.C.)
p
u y ProcesoActuador
SensorTransmisor
Controlador yd
Fig. 1.7 Esquema general de control con realimentación.
Apuntes: 543 444 5
Copyright ©por Prof. José R. Espinoza
Def.: Un sistema de control en lazo abierto (L.A.) es aquel en que la salida no tiene efecto sobre la acción de control.
De acuerdo a las definiciones anteriores se tiene que la estructura general de control realimentado está dada por la Fig. 1.7.
1.3 Ejemplos.
A continuación se ilustran algunos ejemplos, en donde se muestra que las realidades físicas tienen distintos grados de complejidad. Esto se debe en parte a las múltiples entradas, múltiples salidas, no-linealidades, variables que no se pueden medir, perturbaciones, etc. que se pueden encontrar en los sistemas reales.
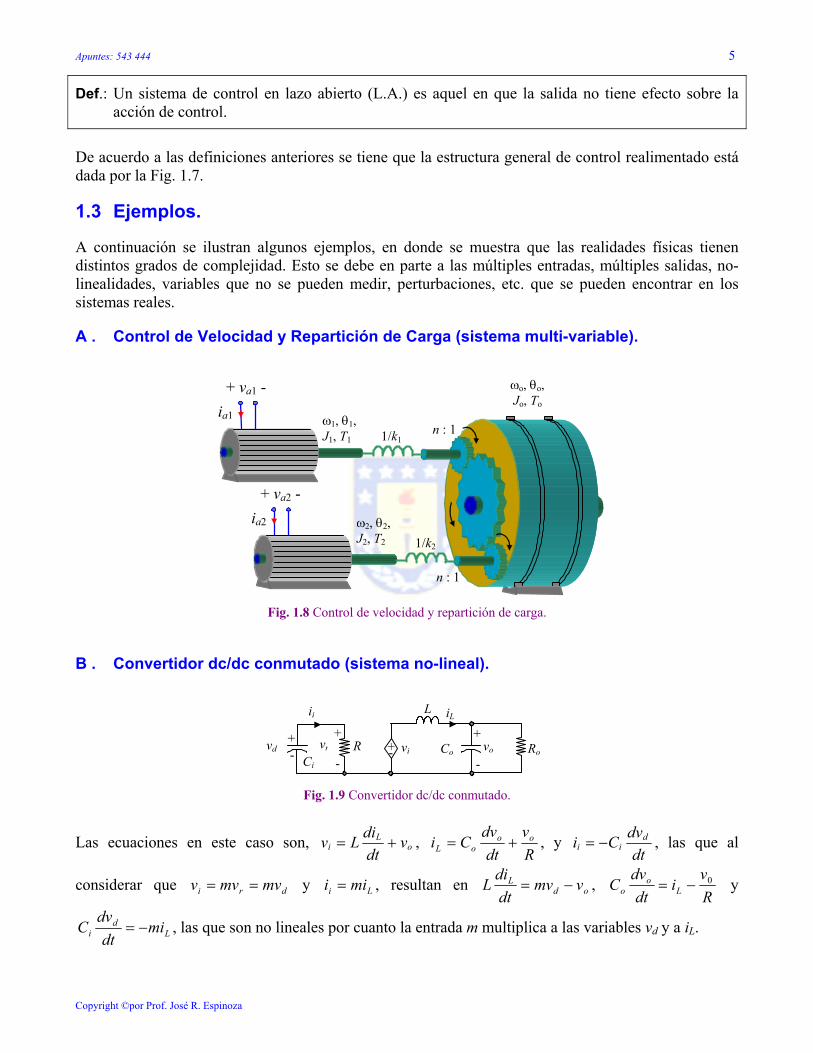
A . Control de Velocidad y Repartición de Carga (sistema multi-variable).
B . Convertidor dc/dc conmutado (sistema no-lineal).
Las ecuaciones en este caso son, oL
i vdtdiLv += ,
Rv
dtdv
Ci oooL += , y
dtdvCi d
ii −= , las que al
considerar que dri mvmvv == y Li mii = , resultan en odL vmv
dtdiL −= ,
Rv
idt
dvC L
oo
0−= y
Ld
i midt
dvC −= , las que son no lineales por cuanto la entrada m multiplica a las variables vd y a iL.
+ va1 -
ia1 ω1, θ1, J1, T1
ωo, θo, Jo, To
n : 1 1/k1
+ va2 -
ia2 ω2, θ2, J2, T2
n : 1
1/k2
Fig. 1.8 Control de velocidad y repartición de carga.
R++
- -vd
+
-+-
L
vi
ii
vr
iL
voCo RoCi
Fig. 1.9 Convertidor dc/dc conmutado.
Apuntes: 543 444 6
Copyright ©por Prof. José R. Espinoza
C . Flujo de Dinero en un País (sistema incierto).
D . Valor de la UF (sistema discreto).
Ejemplo 1.1. Estudiar el comportamiento del estanque en L.A. y luego en L.C.. R.: El modelo del estanque como ilustrado
en la Fig. 1.6(a) está dado por es ffdtdhA
dtdV
+−== . Tomando Laplace se tiene: )(sAshff es =+− lo que es
representado como se ilustra en la Fig. 1.12(a). Si la válvula tiene por F. de T. a v(s) = 1 y se considera que A = 1, entonces
el modelo es )(1)( sfus
sh −= . Si se considera que u = fs = 10, la altura es constante, matemáticamente,
)0()0()()( )(1)(0
hhdtfuthfus
sht
ss =+−=→−= ∫ . Si por el contrario la perturbación fs está dada por: fs(t) = 10 +
u(t−1), se tiene que )0())1(1010()(0
hdttutht
+−−−= ∫ )0()1( htr +−−= . Esta situación está ilustrada en la Fig. 1.12(b). Si
por otro lado, la entrada a la válvula se determina en un esquema realimentado como el ilustrado en la Fig. 1.6(b),
considerando que los bloques sensor y transmisor tienen F. de T. unitaria y el controlador tiene una F. de T. 1
)(+τ
=sk
sc p ,
se tiene que,
Medición
Gobierno Empresas
Impuestos
Consumidores
+
+
+
Inversionesprivadas
Utilidades nacionales deseadas Utilidades
Nacionales-
-
Fig. 1.10 Sistema económico de un país.
A/DGobierno ?
U.F. vi
CLK
t
kT
?
vo
vi
vo
Fig. 1.11 Sistema económico de un país.

Apuntes: 543 444 7
Copyright ©por Prof. José R. Espinoza
)(1)( sfuAs
sh −= , con )( hhcu d −= , entonces h(s) = )(1sd fchch
s−− =
sf
hsch
sc s
d −− , con lo que
+
scsh 1)( =
sf
hsc s
d − , si se define )(1 sgAs
= , entonces, )1)(( cgsh + = sd gfcgh − . Por lo que finalmente se tiene que, h(s) =
sd fcg
ghcg
cg+
−+ 11
. Claramente, la altura depende de la entrada hd y la perturbación fs. Lo ideal sería que el factor que
multiplica a fs fuera 0 y que el factor que multiplica a hd fuera 1. Sin embargo, para el controlador indicado se tiene que los factores son,
ppp ksss
ksss
ssks
cgg
++τ
+τ=
++τ+τ
=+τ+
=+ 2
1)1(
1)1(1
/11
,
p
p
p
p
p
p
kssk
kssk
sskssk
cgcg
++τ=
++τ=
+τ++τ
=+ 2)1()1(1
)1(1
.
Las expresiones anteriores no son lo esperado y es más, sus ganancias dc son 1/kp (que debiera ser 0) y 1, respectivamente. Es decir, un cambio escalón en la perturbación se reflejará en S.S. en un factor 1/kp. Esto se ilustra en la Fig. 1.6(c).
Si en cambio, el controlador a utilizar es
+τ
=s
sksc p1)( , se encuentra que h(s) = sd f
cggh
cgcg
+−
+ 11 en donde los
coeficientes son:
ppp kskss
ssks
cgg
+τ+=
+τ+=
+ 22)1(1/1
1,
fs
fe h
EstánqueVálvula
u +
-1
Asv(s)
a)
h(t)
h(0)
t
t1
t
u(t)
fs(t)
error en S.S.
h(t)
h(0)
t 1
t
fs(t)
t
hd(t)
b) c)
Fig. 1.12 Estanque operando en L.A. y L.C. (a) diagrama del estanque operando en L.A.; (b) formas de onda del estanque en L.A.; (c) formas de onda del estanque en L.C.
Apuntes: 543 444 8
Copyright ©por Prof. José R. Espinoza
pp
pp
p
p
ksksksk
sskssk
cgcg
+τ+
+τ=
+τ+
+τ+ 22
2
)1(1)1(
1. Las expresiones anteriores no son tampoco lo esperado pero sus ganancias dc
son 0 y 1, respectivamente. Es decir, en estado estacionario este controlador permite lograr los objetivos de diseño. Sólo en régimen transitorio se obtienen variaciones no deseadas de la altura en el estanque. ♣
1.4 Otros Controladores.
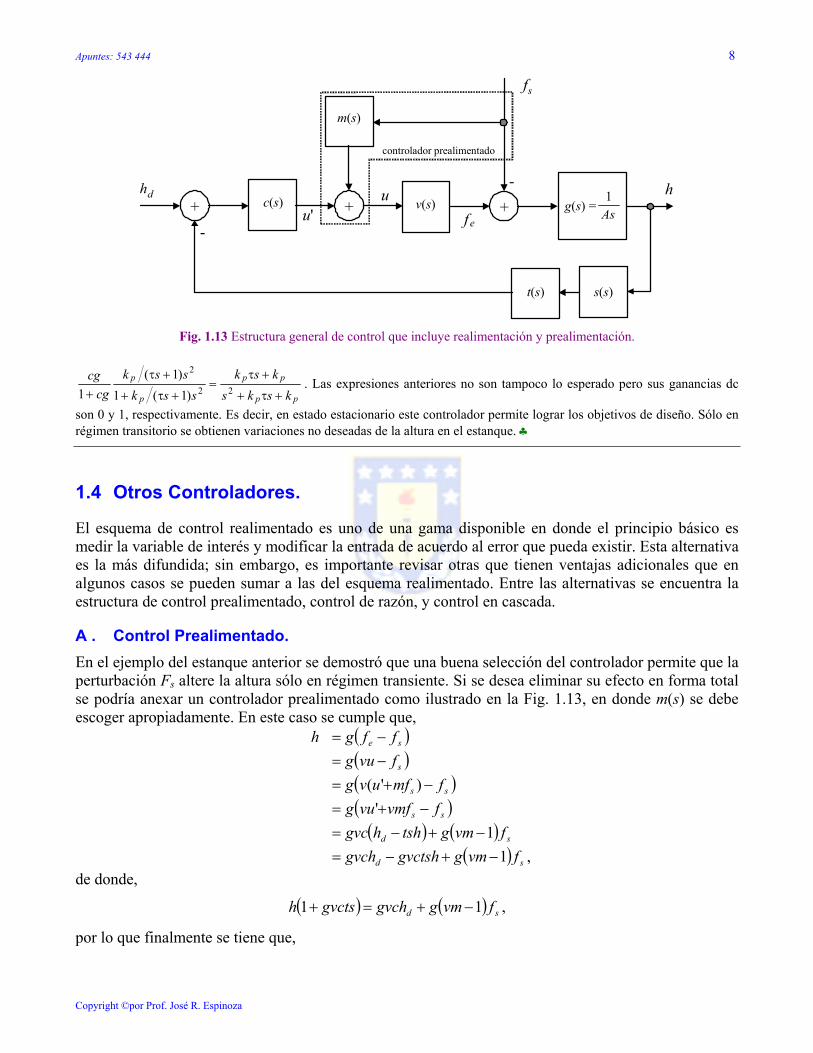
El esquema de control realimentado es uno de una gama disponible en donde el principio básico es medir la variable de interés y modificar la entrada de acuerdo al error que pueda existir. Esta alternativa es la más difundida; sin embargo, es importante revisar otras que tienen ventajas adicionales que en algunos casos se pueden sumar a las del esquema realimentado. Entre las alternativas se encuentra la estructura de control prealimentado, control de razón, y control en cascada.
A . Control Prealimentado. En el ejemplo del estanque anterior se demostró que una buena selección del controlador permite que la perturbación Fs altere la altura sólo en régimen transiente. Si se desea eliminar su efecto en forma total se podría anexar un controlador prealimentado como ilustrado en la Fig. 1.13, en donde m(s) se debe escoger apropiadamente. En este caso se cumple que, h ( )se ffg −= ( )sfvug −= ( )ss fmfuvg −+= )'( ( )ss fvmfvug −+= ' ( ) ( ) sd fvmgtshhgvc 1−+−= ( ) sd fvmggvctshgvch 1−+−= , de donde,
( ) ( ) sd fvmggvchgvctsh 11 −+=+ ,
por lo que finalmente se tiene que,
+f e
fs
1 As
s ( s )
- h+
-
+
t(s)
m(s)
uu'
h d
controlador prealimentado
v(s)c(s) g(s) =
Fig. 1.13 Estructura general de control que incluye realimentación y prealimentación.
Apuntes: 543 444 9
Copyright ©por Prof. José R. Espinoza
( )sd f
gcvtsvmgh
gcvtsgcvh
+−
++
=1
11
,
de donde claramente se ve que si m(s) se escoge como m(s) = 1/v(s) se elimina el efecto de la perturbación fs en la salida h. De esta manera se tiene que la F. de T. resultante es simplemente,
dhgcvts
gcvh+
=1
.
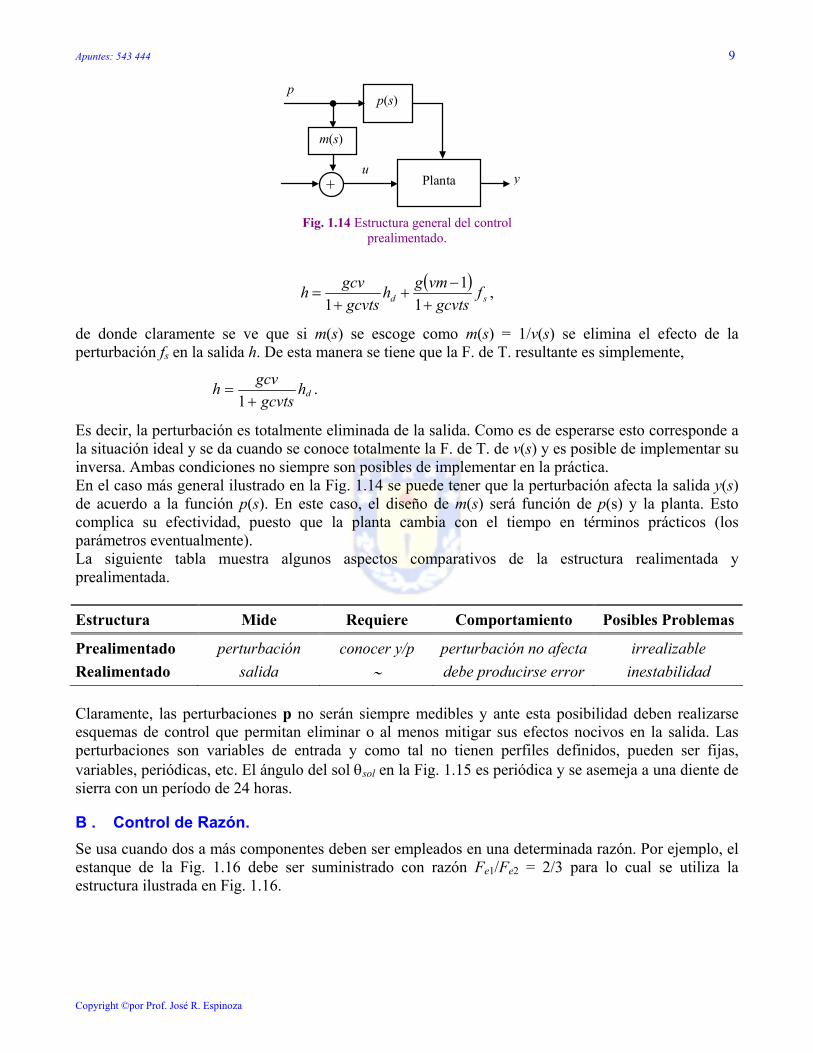
Es decir, la perturbación es totalmente eliminada de la salida. Como es de esperarse esto corresponde a la situación ideal y se da cuando se conoce totalmente la F. de T. de v(s) y es posible de implementar su inversa. Ambas condiciones no siempre son posibles de implementar en la práctica. En el caso más general ilustrado en la Fig. 1.14 se puede tener que la perturbación afecta la salida y(s) de acuerdo a la función p(s). En este caso, el diseño de m(s) será función de p(s) y la planta. Esto complica su efectividad, puesto que la planta cambia con el tiempo en términos prácticos (los parámetros eventualmente). La siguiente tabla muestra algunos aspectos comparativos de la estructura realimentada y prealimentada. Estructura Mide Requiere Comportamiento Posibles Problemas
Prealimentado perturbación conocer y/p perturbación no afecta irrealizable Realimentado salida ∼ debe producirse error inestabilidad Claramente, las perturbaciones p no serán siempre medibles y ante esta posibilidad deben realizarse esquemas de control que permitan eliminar o al menos mitigar sus efectos nocivos en la salida. Las perturbaciones son variables de entrada y como tal no tienen perfiles definidos, pueden ser fijas, variables, periódicas, etc. El ángulo del sol θsol en la Fig. 1.15 es periódica y se asemeja a una diente de sierra con un período de 24 horas.
B . Control de Razón. Se usa cuando dos a más componentes deben ser empleados en una determinada razón. Por ejemplo, el estanque de la Fig. 1.16 debe ser suministrado con razón Fe1/Fe2 = 2/3 para lo cual se utiliza la estructura ilustrada en Fig. 1.16.
Planta
p(s)
+u
m(s)
p
y
Fig. 1.14 Estructura general del control
prealimentado.
Apuntes: 543 444 10
Copyright ©por Prof. José R. Espinoza
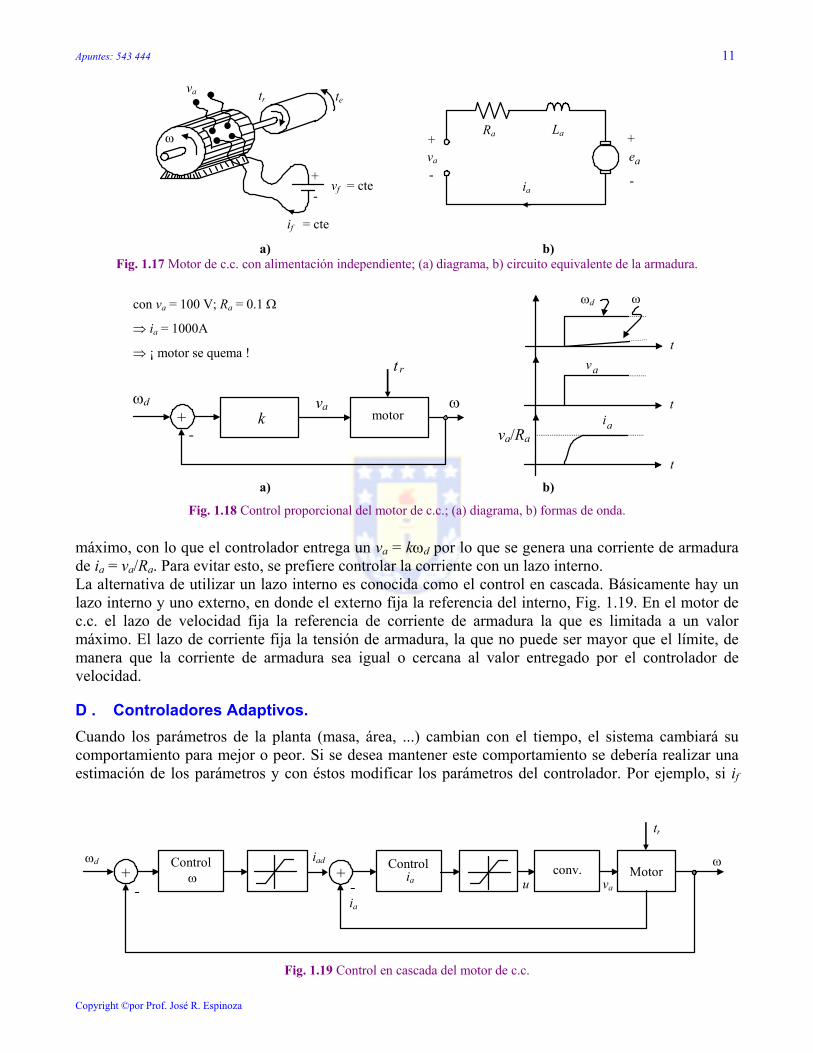
C . Control en Cascada. Para introducir este tipo de estrategia se utiliza el caso del motor de corriente continua ilustrado en la Fig. 1.17(a) el cual es alimentado independientemente. En este caso el modelo equivalente para la parte eléctrica está en la Fig. 1.17(b). Por lo tanto, las ecuaciones son,
aa
aaaa edtdiLiRv ++= ω−−=
ω fttdtdJ re ,
por lo que al considerar que,
ω=ω= bffaa kIkke , amaffae ikiIkht == ' ,
el sistema queda como,
daa
ba
a
aa vLL
kiLR
dtdi 1
+ω−−= ram t
Ji
Jk
Jf
dtd 1
++ω−=ω .
Una primera alternativa es utilizar la estrategia ilustrada en la Fig. 1.18(a). En este caso, para cambios bruscos de va para ajustar la velocidad, la corriente de armadura puede exceder el valor máximo del motor. Este es el caso ilustrado en la Fig. 1.18(b) donde la referencia de velocidad es llevada a su
θsol
θ2 θ1
θcel
vc
V1
V2 vout
Fig. 1.15 Sistema de posicionamiento unidimensional.
Fs=10
u2=6
Fe1
controlde razón
SH TH
hd = 20F e2
20 = h
control
u = 10
u1= 4
Fig. 1.16 Ejemplo del control de razón (valores en S.S.).
Apuntes: 543 444 11
Copyright ©por Prof. José R. Espinoza
máximo, con lo que el controlador entrega un va = kωd por lo que se genera una corriente de armadura de ia = va/Ra. Para evitar esto, se prefiere controlar la corriente con un lazo interno. La alternativa de utilizar un lazo interno es conocida como el control en cascada. Básicamente hay un lazo interno y uno externo, en donde el externo fija la referencia del interno, Fig. 1.19. En el motor de c.c. el lazo de velocidad fija la referencia de corriente de armadura la que es limitada a un valor máximo. El lazo de corriente fija la tensión de armadura, la que no puede ser mayor que el límite, de manera que la corriente de armadura sea igual o cercana al valor entregado por el controlador de velocidad.
D . Controladores Adaptivos. Cuando los parámetros de la planta (masa, área, ...) cambian con el tiempo, el sistema cambiará su comportamiento para mejor o peor. Si se desea mantener este comportamiento se debería realizar una estimación de los parámetros y con éstos modificar los parámetros del controlador. Por ejemplo, si if
te
ω
+ -
vf = cte
va
if = cte
tr
Ra La
e a va
+
- ia
+
-
a) b)
Fig. 1.17 Motor de c.c. con alimentación independiente; (a) diagrama, b) circuito equivalente de la armadura.
k motor+ -
ωd v a
t r
ω
t
t
t
ωd ω
va
iava/Ra
a) b)
Fig. 1.18 Control proporcional del motor de c.c.; (a) diagrama, b) formas de onda.
Control ω +
-
ωd
tr
ωControl+-
iad conv.
ia
u va Motoria
Fig. 1.19 Control en cascada del motor de c.c.
con va = 100 V; Ra = 0.1 Ω
⇒ ia = 1000A
⇒ ¡ motor se quema !
Apuntes: 543 444 12
Copyright ©por Prof. José R. Espinoza
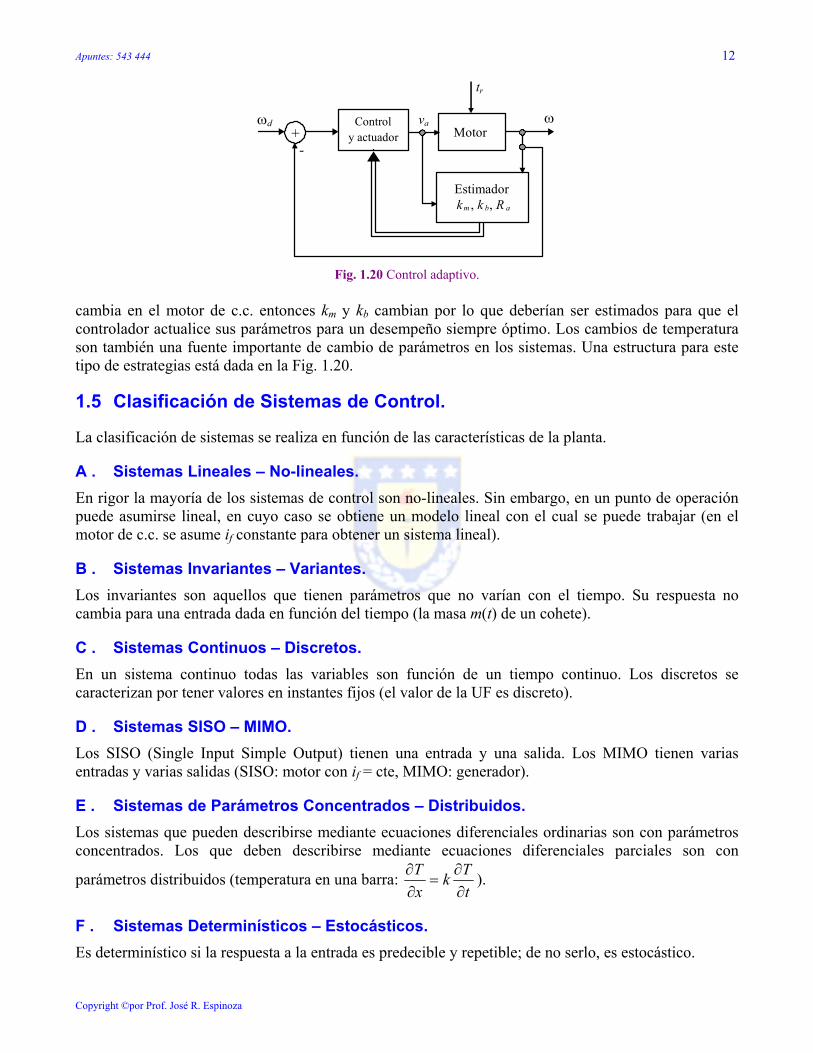
cambia en el motor de c.c. entonces km y kb cambian por lo que deberían ser estimados para que el controlador actualice sus parámetros para un desempeño siempre óptimo. Los cambios de temperatura son también una fuente importante de cambio de parámetros en los sistemas. Una estructura para este tipo de estrategias está dada en la Fig. 1.20.
1.5 Clasificación de Sistemas de Control.
La clasificación de sistemas se realiza en función de las características de la planta.
A . Sistemas Lineales – No-lineales. En rigor la mayoría de los sistemas de control son no-lineales. Sin embargo, en un punto de operación puede asumirse lineal, en cuyo caso se obtiene un modelo lineal con el cual se puede trabajar (en el motor de c.c. se asume if constante para obtener un sistema lineal).
B . Sistemas Invariantes – Variantes. Los invariantes son aquellos que tienen parámetros que no varían con el tiempo. Su respuesta no cambia para una entrada dada en función del tiempo (la masa m(t) de un cohete).
C . Sistemas Continuos – Discretos. En un sistema continuo todas las variables son función de un tiempo continuo. Los discretos se caracterizan por tener valores en instantes fijos (el valor de la UF es discreto).
D . Sistemas SISO – MIMO. Los SISO (Single Input Simple Output) tienen una entrada y una salida. Los MIMO tienen varias entradas y varias salidas (SISO: motor con if = cte, MIMO: generador).
E . Sistemas de Parámetros Concentrados – Distribuidos. Los sistemas que pueden describirse mediante ecuaciones diferenciales ordinarias son con parámetros concentrados. Los que deben describirse mediante ecuaciones diferenciales parciales son con
parámetros distribuidos (temperatura en una barra: tTk
xT
∂∂
=∂∂ ).
F . Sistemas Determinísticos – Estocásticos. Es determinístico si la respuesta a la entrada es predecible y repetible; de no serlo, es estocástico.
Controly actuador+
-
ωd vaMotor
Estimadorkm , k b, R a
ω
tr
Fig. 1.20 Control adaptivo.
Apuntes: 543 444 13
Copyright ©por Prof. José R. Espinoza
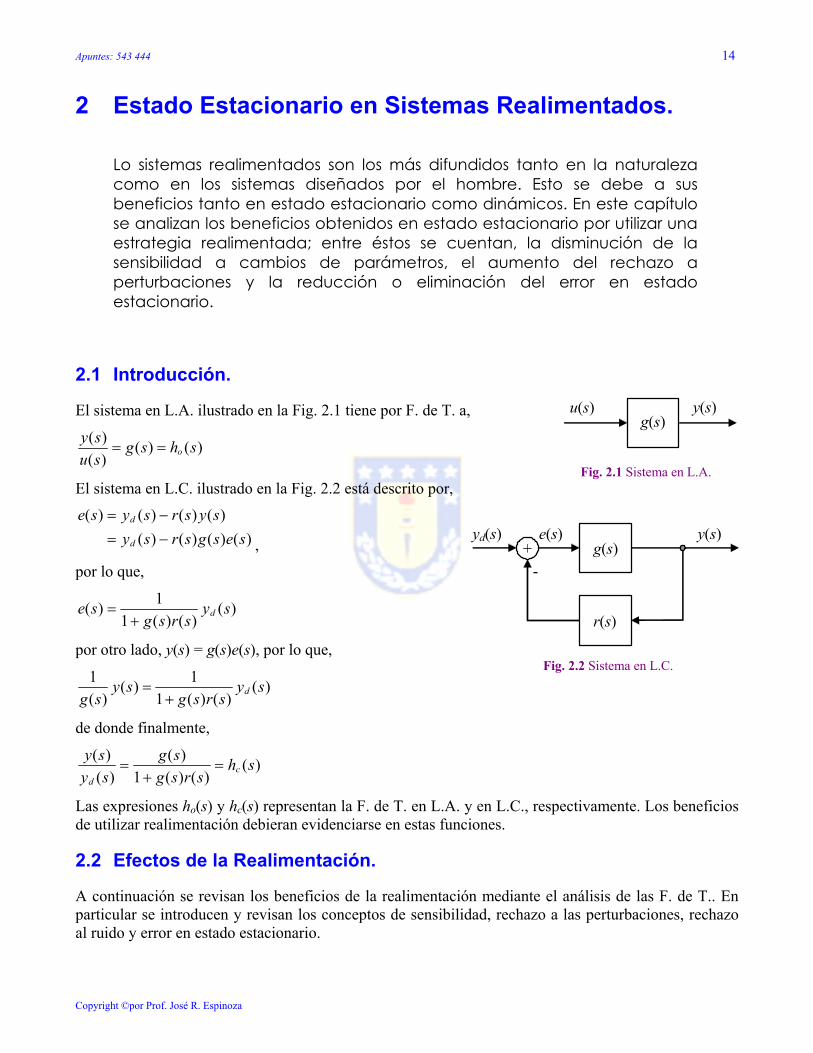
1.6 Alcances del Curso 543 444.
En este curso se estudiarán sistemas lineales, invariantes, continuos, SISO, concentrados y determinísticos, como el ilustrado en el Fig. 1.21. Para controlarlos se estudiarán controladores prealimentados y esencialmente realimentados. Especial énfasis se dará a los controladores en adelanto, retraso y el P.I.D. (proporcional, integral, derivativo). Lo mínimo que se exigirá será estabilidad y lo óptimo de acuerdo al diseño en particular. Se debe considerar que el control se realiza por dos razones: - Mantener un proceso en un punto de operación (regulación). - Llevar el proceso de un punto de operación a otro (seguimiento). Las herramientas a utilizar son esencialmente el L.G.R., el Diagrama de Bode y el Criterio de Nyquist.
+
p
s(s)
- y+
-
+
m(s)
u yd v(s)c(s) g(s)
t(s)
Fig. 1.21 Estructura general de control general a estudiar en este curso.
Apuntes: 543 444 14
Copyright ©por Prof. José R. Espinoza
2 Estado Estacionario en Sistemas Realimentados.
Lo sistemas realimentados son los más difundidos tanto en la naturaleza como en los sistemas diseñados por el hombre. Esto se debe a sus beneficios tanto en estado estacionario como dinámicos. En este capítulo se analizan los beneficios obtenidos en estado estacionario por utilizar una estrategia realimentada; entre éstos se cuentan, la disminución de la sensibilidad a cambios de parámetros, el aumento del rechazo a perturbaciones y la reducción o eliminación del error en estado estacionario.
2.1 Introducción.
El sistema en L.A. ilustrado en la Fig. 2.1 tiene por F. de T. a,
)()()()( shsg
susy
o==
El sistema en L.C. ilustrado en la Fig. 2.2 está descrito por,
)()()()()()()()(
sesgsrsysysrsyse
d
d
−=−=
,
por lo que,
)()()(1
1)( sysrsg
se d+
=
por otro lado, y(s) = g(s)e(s), por lo que,
)()()(1
1)()(
1 sysrsg
sysg d
+=
de donde finalmente,
)()()(1
)()()( sh
srsgsg
sysy
cd
=+
=
Las expresiones ho(s) y hc(s) representan la F. de T. en L.A. y en L.C., respectivamente. Los beneficios de utilizar realimentación debieran evidenciarse en estas funciones.
2.2 Efectos de la Realimentación.
A continuación se revisan los beneficios de la realimentación mediante el análisis de las F. de T.. En particular se introducen y revisan los conceptos de sensibilidad, rechazo a las perturbaciones, rechazo al ruido y error en estado estacionario.
g(s)u(s) y(s)
Fig. 2.1 Sistema en L.A.
g(s) yd(s) y(s)
r(s)
e(s)+
-
Fig. 2.2 Sistema en L.C.

Apuntes: 543 444 15
Copyright ©por Prof. José R. Espinoza
A . Sensibilidad. Se define como la variación porcentual de alguna cantidad específica del sistema con respecto a la variación porcentual de algún parámetro del sistema. Por ejemplo, la sensibilidad de la función h(s) con respecto a la variación en el parámetro α se denota y define entonces por:
α
α=
αα∆∆
=α
=α ddh
hhhhS h
//
en cambio % en cambio % .
Cuando 0→αhS el sistema es menos sensible. Por lo tanto, 0=α
hS sería la condición ideal.
Ejemplo 2.1. Calcular hgS para L.A. y para L.C. R.:
a) 11 =⋅==gg
dgdh
hgS o
o
hg
o
b) grgr
grgrgrg
gdgdh
hgS c
c
hg
c
+=
+−+
⋅+
==1
1)1(
)1()1/( 2
Dado que occ hg
hg SS < se tiene una ventaja del sistemas en L.C.. Notar que 0→ch
gS si ∞→)(sr . ♣
El ejemplo anterior muestra que la sensibilidad es una función que depende de s y por lo tanto se puede dibujar su Diagrama de Bode. Es decir, la sensibilidad depende de la frecuencia y por lo tanto los requerimientos de condición ideal pueden relajarse requiriendo sensibilidad cero en un rango dado de frecuencias. Es más, puede relajarse todavía más si se requiere sensibilidad sólo menor que un ε > 0 en un rango de frecuencias.
Ejemplo 2.2. Si g(s) = k y r(s) = 1, calcular ykS para L.A. y para L.C.. R.:
a) 1=⋅== ukuk
dkdy
ykS y
k
b) kk
kkykky
kS dd
yk +
=+
−+⋅
+⋅=
11
)1()1(
)1/( 2
Si k > 0, el sistema en L.C. presenta una salida menos sensible a cambios de la ganancia del proceso. Por ejemplo, si k = 10, el sistema en L.C. es a lo menos 10 veces menos sensible. ♣
B . Perturbaciones. El sistema de la Fig. 2.3 está en L.A. y tiene una perturbación. La ecuación que describe a este sistema es la siguiente,
g(s)u(s) y(s)
p(s)
+
Planta
fsh
fe
u Fs : perturbación
Fig. 2.3 Sistema con perturbación en L.A. (a) diagrama, (b) ejemplo.
Apuntes: 543 444 16
Copyright ©por Prof. José R. Espinoza
)()()()())()()(()( spsgsusgspsusgsy +=+= ,
entonces,
)()()(
0)(
sgspsy
su
==
.
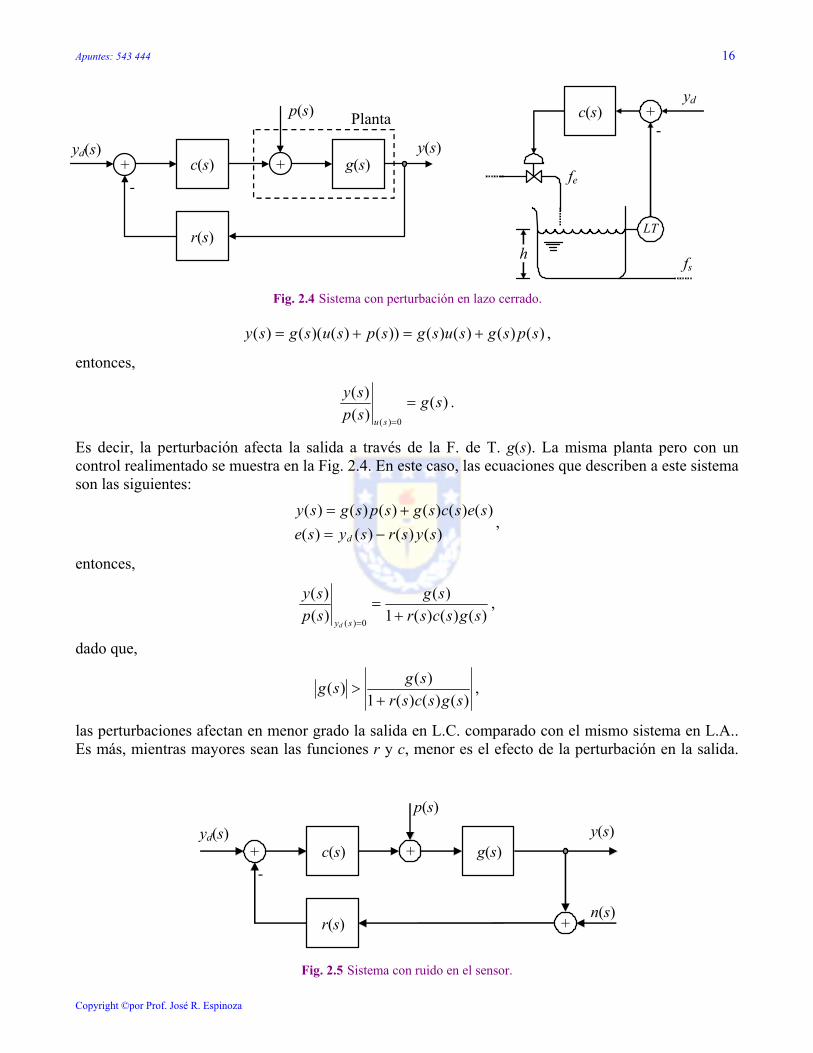
Es decir, la perturbación afecta la salida a través de la F. de T. g(s). La misma planta pero con un control realimentado se muestra en la Fig. 2.4. En este caso, las ecuaciones que describen a este sistema son las siguientes:
)()()()(
)()()()()()(sysrsyse
sescsgspsgsy
d −=+=
,
entonces,
)()()(1
)()()(
0)( sgscsrsg
spsy
syd+
==
,
dado que,
)()()(1
)()(sgscsr
sgsg+
> ,
las perturbaciones afectan en menor grado la salida en L.C. comparado con el mismo sistema en L.A.. Es más, mientras mayores sean las funciones r y c, menor es el efecto de la perturbación en la salida.
c(s)yd(s) y(s)
r(s)
p(s)
+-
g(s)+
Planta
fsh
fe
ydc(s)
LT
+-
Fig. 2.4 Sistema con perturbación en lazo cerrado.
c(s)yd(s) y(s)
r(s)
p(s)
+
-
g(s)+
+n(s)
Fig. 2.5 Sistema con ruido en el sensor.
Apuntes: 543 444 17
Copyright ©por Prof. José R. Espinoza
Es importante destacar que el controlador es la componente diseñada y normalmente es donde se puede imponer la condición anterior. Además, la relación entre la perturbación y la salida es función de s y por tanto de la frecuencia. Es decir, una perturbación de igual amplitud puede afectar en mayor o menor grado a la salida dependiendo de la frecuencia de ésta.
C . Ruido en el Sensor. Se asume el esquema ilustrado en la Fig. 2.5, en donde hay un ruido que se suma a la medida entregada por el sensor y se transmite al controlador. Para analizar el efecto del ruido se asume p(s) = yd(s) = 0, por lo que se obtiene ))()()(()()()( snsysrscsgsy +−= . Entonces,
)()()(1
)()()()()(
0)()( srscsgsrscsg
snsy
spsyd+
−=
==
.
Para disminuir la sensibilidad al ruido se debiera tener que g, c, o r tiendan a cero, lo que se contradice con la atenuación de las perturbaciones.
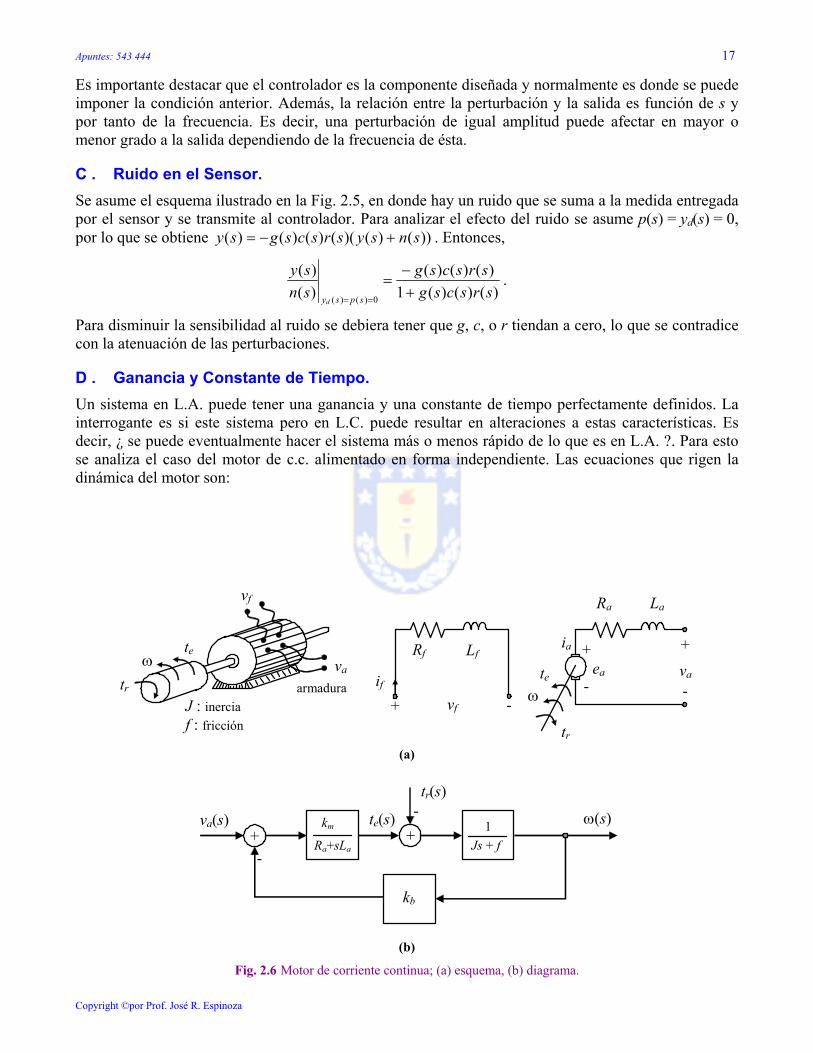
D . Ganancia y Constante de Tiempo. Un sistema en L.A. puede tener una ganancia y una constante de tiempo perfectamente definidos. La interrogante es si este sistema pero en L.C. puede resultar en alteraciones a estas características. Es decir, ¿ se puede eventualmente hacer el sistema más o menos rápido de lo que es en L.A. ?. Para esto se analiza el caso del motor de c.c. alimentado en forma independiente. Las ecuaciones que rigen la dinámica del motor son:
iftr
vf
te ω va
Ra
ia
ea va
+
-
Rf
+
Lf
vf -
+
La
tr
te
-armadura
J : inercia f : fricción
ω
(a)
kmva(s) ω(s)
kb
tr(s)
+
-
+Ra+sLa
1Js + f
te(s) -
(b)
Fig. 2.6 Motor de corriente continua; (a) esquema, (b) diagrama.

Apuntes: 543 444 18
Copyright ©por Prof. José R. Espinoza
ω−−=
ωφ=+=
=φωφ=++=
fTTdtdJikT
dtdi
LiRv
ikkeedtdi
LiRv
reaaef
ffff
ffaaaa
aaaa
'.
En modo excitación independiente, vf = Vf ⇒ if = If = Vf / Rf . Luego,
amaffaebffaa ikiIkkTkIkke ==ω=ω= )'()( .
Aplicando la transformada de Laplace,
)()()()(
)()()(
sTsTsfJs
sksTk
sLRsv
re
bem
aaa
−=ω+
ω++
=.
Si Tr(s) = 0 (es decir, la perturbación es nula),
mbaa
m
a kkfJssLRk
svs
+++=
ω))(()(
)( .
Si τa = La / Ra es considerada mucho más rápida que la constante de tiempo mecánica, entonces,
1)(
)(1
1
+τ=
ωsk
svs
a,
con mba
m
kkfRk
k+
=1 y mba
a
kkfRJR
+=τ1 . Por lo tanto, la máquina de c.c. con excitación
independiente puede ser representada por la Fig. 2.7 que corresponde a un sistema en L.A. Si va(s) = 1/s, la respuesta dinámica está dada por,
)1(1
11
)( 11111
1
1111
1
11 τ−τ−−− −=−=
+ττ−
+=
+τ=ω tt ekekk
sk
sk
sskt LL ,
la cual está caracterizada por una ganancia k1 y una constante de tiempo τ1. Asumamos el mismo sistema pero realimentado como se ilustra en la Fig. 2.8 donde se tiene que,
11
1
1)()(
kkskk
st
c
c
d ++τ=
ωω .
ω(s)k1
τ1s+1
va(s)
Fig. 2.7 Diagrama de bloques equivalente del motor de corriente continua.
ωd(s) ω(s)kc+
-
k1
τ1s+1
va(s)
Fig. 2.8 Sistema motor c.c. con realimentación.
Apuntes: 543 444 19
Copyright ©por Prof. José R. Espinoza
Por lo tanto, si ωd(s) = 1/s, la respuesta dinámica en L.C. está dada por:
( ))1/(
1
1
11
1
1
1
1
11
11
11
1111
11
11
1)(
kkt
c
c
cc
c
c
c
c
c
cekk
kkkkskk
kkskk
kkskks
kkt
+τ−
−−
−+
=
+ττ
+−
+=
++τ=ω LL
.
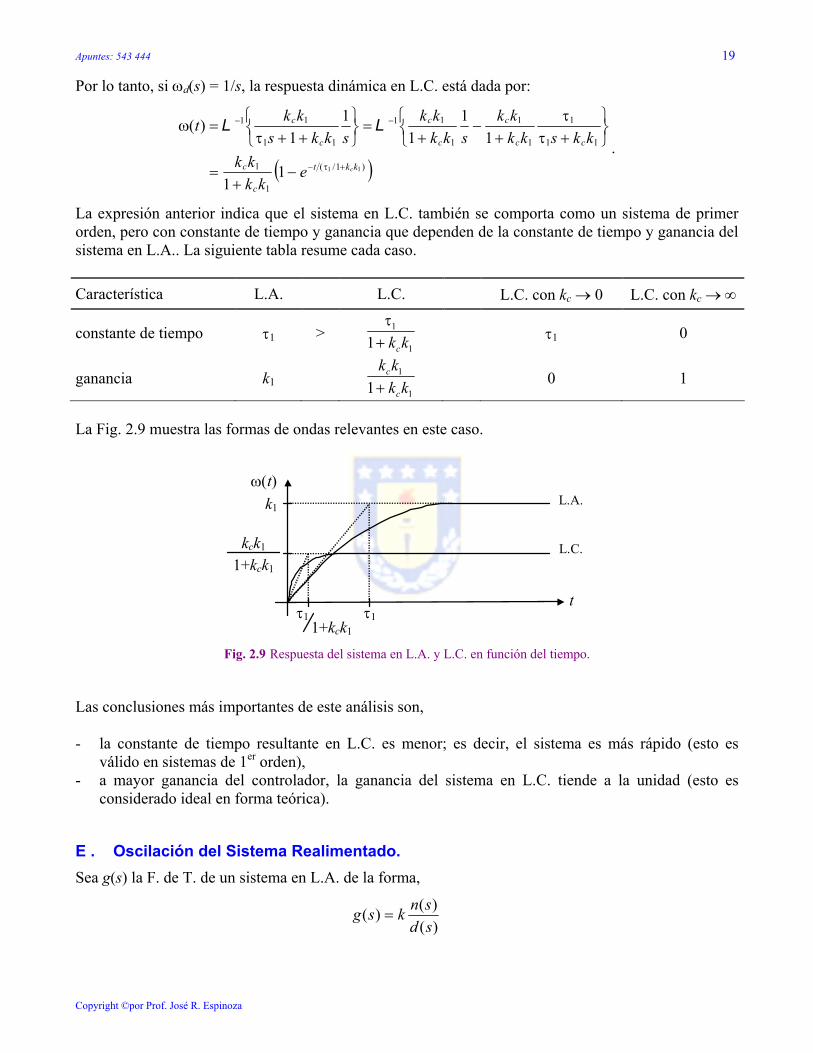
La expresión anterior indica que el sistema en L.C. también se comporta como un sistema de primer orden, pero con constante de tiempo y ganancia que dependen de la constante de tiempo y ganancia del sistema en L.A.. La siguiente tabla resume cada caso. Característica L.A. L.C. L.C. con kc → 0 L.C. con kc → ∞
constante de tiempo τ1 > 1
1
1 kkc+τ
τ1 0
ganancia k1 1
1
1 kkkk
c
c
+
0 1
La Fig. 2.9 muestra las formas de ondas relevantes en este caso.
Las conclusiones más importantes de este análisis son, - la constante de tiempo resultante en L.C. es menor; es decir, el sistema es más rápido (esto es
válido en sistemas de 1er orden), - a mayor ganancia del controlador, la ganancia del sistema en L.C. tiende a la unidad (esto es
considerado ideal en forma teórica).
E . Oscilación del Sistema Realimentado. Sea g(s) la F. de T. de un sistema en L.A. de la forma,
)()()(
sdsnksg =
ω(t)
t
L.A.
L.C.
k1
kck1
1+kck1
1+kck1τ1 τ1
Fig. 2.9 Respuesta del sistema en L.A. y L.C. en función del tiempo.

Apuntes: 543 444 20
Copyright ©por Prof. José R. Espinoza
en que n(s) y d(s) son funciones polinomiales de s. Por lo tanto, los polos de g(s) son las raíces de d(s). Por ejemplo, g(s) puede ser de la forma,
))((
1)(bsas
ksg++
= ,
que puede satisfacer: (i) a = 0, b >0; (ii) a > 0, b > 0; (iii) a y b complejos, con a > 0. La ubicación de polos para cada caso se ilustra en la Fig. 2.10(a) y la correspondiente respuesta para entrada escalón en la Fig. 2.10(b). Se puede observar que en los casos (i) y (ii) el sistema no oscila para entradas escalón. La pregunta es ¿ podría en estos casos la respuesta oscilar para entrada escalón por el hecho de realimentar el sistema ?. Para responder esto se supone el esquema realimentado de la Fig. 2.11 y se analizan las respuestas para entrada escalón para los tres casos antes indicados. La F. de T. en L.C. es,
)()(
)()())(()(
)(2 snkksd
snkkkkabsbas
kkkkbsas
kksysy
c
c
c
c
c
c
d +=
++++=
+++= .
Se puede apreciar que los polos están dados por d(s) + kkcn(s). Por lo tanto, una nueva dinámica, que depende de k, regirá el sistema. En nuestro ejemplo, los polos en L.C. están dados por,
)(4)(2
22,1 kkabbabas c+−+±
+−= ,
donde se aprecia que la parte real es siempre negativa y por tanto el sistema en L.C. es siempre estable (esto es válido sólo en este caso de estudio). Ahora se revisan los diferentes casos,
jω
iii)ii)i)
jω jω
a -b
σ σ σ -a-b
(a)
y(t)
t
iii)ii)
i)
(b)
Fig. 2.10 Sistema en L.A. (a) ubicación de polos, (b) respuestas para entrada escalón.
y(s) n(s)d(s)
u(s)g(s) =kc +
-
yd(s) k
Fig. 2.11 Sistema en L.C.

Apuntes: 543 444 21
Copyright ©por Prof. José R. Espinoza
Caso i) a = 0, b > 0 (no oscila en L.A.)
− kbkc 42< : 2 raíces reales distintas. − kbkc 42= : 2 raíces reales iguales (s1,2 = −b/2). − kbkc 42> : 2 raíces complejas conjugadas (ℜes1,2 = −b/2). (sistema oscilatorio)
Caso ii) a > 0, b > 0 (no oscila en L.A.)
− ( ) kabbakc 44)( 2 −+< : 2 raíces reales distintas. − ( ) kabbakc 44)( 2 −+= : 2 raíces reales iguales (s1,2 = −(a + b)/2). − ( ) kabbakc 44)( 2 −+> : 2 raíces complejas conjugadas (ℜes1,2 = −(a + b)/2). (sistema oscilatorio)
Caso iii) a y b complejos: Siempre oscila en L.A. y ∀ kc > 0 el sistema oscila en L.C.. En conclusión, el sistema en L.A. que nunca oscilaba puede oscilar en L.C. Esto puede ser desventajoso en algunos casos, por ejemplo, sistemas biológicos.
2.3 Estabilización utilizando Realimentación.
Un sistema puede ser inestable en forma natural como el circuito eléctrico de la Fig. 2.12 que tiene por carga a un consumo de potencia constante. Este es el caso de la mayoría de las fuentes de poder actualmente en uso. Recordemos que:
000 )(')()( xxxfxfxf −+≈ ,
y que las variables del circuito pueden ser escritas como,
eEe
iIivVv
∆+=∆+=∆+=
,
en donde e·i = P = cte. Entonces:
+
i
∼-
v L
e +
-
Fig. 2.12 Circuito eléctrico.
1∆v ∆i
Ls − R
Fig. 2.13 Diagrama de bloques del circuito eléctrico.
Apuntes: 543 444 22
Copyright ©por Prof. José R. Espinoza
)(2 IiIPE
iPe −−≈= ,
y por tanto,
iRiIPe ∆−=∆−=∆ 2 ,
con R = P/I2, dado que el sistema es lineal en ∆v, ∆i y ∆e, se puede escribir,
iRdt
idLv ∆−∆
=∆ ,
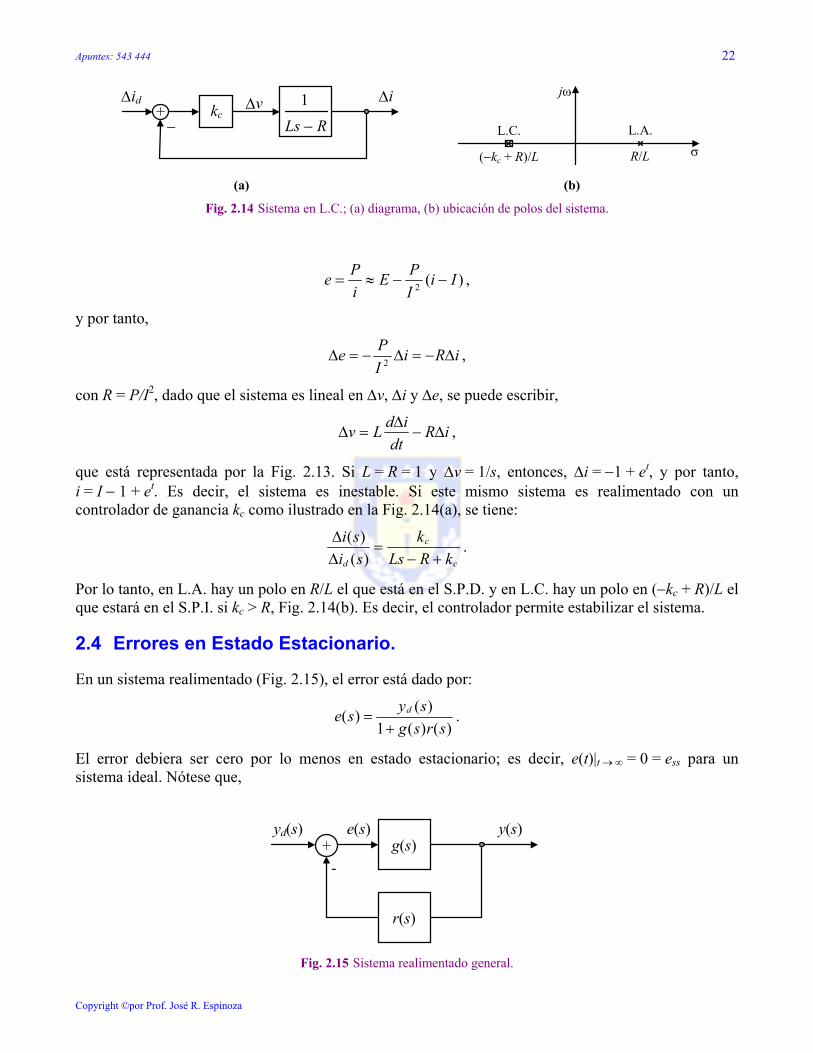
que está representada por la Fig. 2.13. Si L = R = 1 y ∆v = 1/s, entonces, ∆i = −1 + et, y por tanto, i = I − 1 + et. Es decir, el sistema es inestable. Si este mismo sistema es realimentado con un controlador de ganancia kc como ilustrado en la Fig. 2.14(a), se tiene:
c
c
d kRLsk
sisi
+−=
∆∆
)()( .
Por lo tanto, en L.A. hay un polo en R/L el que está en el S.P.D. y en L.C. hay un polo en (−kc + R)/L el que estará en el S.P.I. si kc > R, Fig. 2.14(b). Es decir, el controlador permite estabilizar el sistema.
2.4 Errores en Estado Estacionario.
En un sistema realimentado (Fig. 2.15), el error está dado por:
)()(1
)()(srsg
syse d
+= .
El error debiera ser cero por lo menos en estado estacionario; es decir, e(t)|t → ∞ = 0 = ess para un sistema ideal. Nótese que,
1∆v ∆i
Ls − Rkc
∆id+
−
σ
jω
(−kc + R)/L R/L
L.C. L.A.
(a) (b)
Fig. 2.14 Sistema en L.C.; (a) diagrama, (b) ubicación de polos del sistema.
g(s)yd(s) y(s)
r(s)
e(s)+
-
Fig. 2.15 Sistema realimentado general.

Apuntes: 543 444 23
Copyright ©por Prof. José R. Espinoza
)()(1
)(lím)(lím)(lím00 srsg
ssyssetee d
sstss
+===
→→∞→.
La expresión anterior indica que, - se desea que el ess = 0 para que así se cumpla que la salida sea igual a la referencia en S.S.. esto
satisface la condición de regulación, - se puede ver que el ess depende de la entrada yd(s). Para normalizar su evaluación se definen
entradas normalizadas. Ejemplo 2.3. Sea el ejemplo ilustrado en la Fig. 2.16 en donde se aplica yd(t) = u(t), por lo que se obtiene una salida dada
por la siguiente expresión, )1(1
)( )1/(
1
1 11 kkt
c
c cekk
kkty +τ−−+
= . Por lo que el ess está dado por,
11
1
11
11))()((lím)(
kkkkkktytytee
cc
cd
ttss+
=+
−=−==∞→∞→
. Por otro lado, se puede utilizar que s
kksg c
1
1
1)(
τ+= , y r(s) = 1 y
por lo tanto, 111
10 1
111
1lím
kksskks
seccsss +
=τ++
τ+=
→. Si el controlador, en cambio, fuera kc/s, entonces
)1()(
1
1
+τ=
sskksg c , y
por tanto, 01)1(
)1(lím
11
10
=++τ+τ
=→ skkss
ssse
csss . De esto se concluye que el ess depende del número de integradores de la F. de
T. en L.D. más que de las funciones como tal. ♣
A . Entradas Normalizadas.
Estas se definen como !
)(mttu
m
= ; m = 0, 1, 2.
= +
−1
1 1)( mstu L . La entrada a utilizar al evaluar el ess
depende de lo que se desee evaluar. Las evaluaciones posibles son, Regulación: La entrada es escalón, m = 0. Seguimiento: La entrada es rampa, m = 1. Aceleración: La entrada es parabólica, m = 2.
k1y(s)
τ1s + 1kc
yd(s)+
−
e(s)
Fig. 2.16 Sistema realimentado.
tEscalón
m = 0
1/s
tRampa
m = 1
1/s2
tParábola
m = 2
1/s3
Fig. 2.17 Entradas normalizadas.

Apuntes: 543 444 24
Copyright ©por Prof. José R. Espinoza
En el ejemplo anterior con el controlador definido por kc/s logra que el sistema en L.C. tenga una regulación ideal.
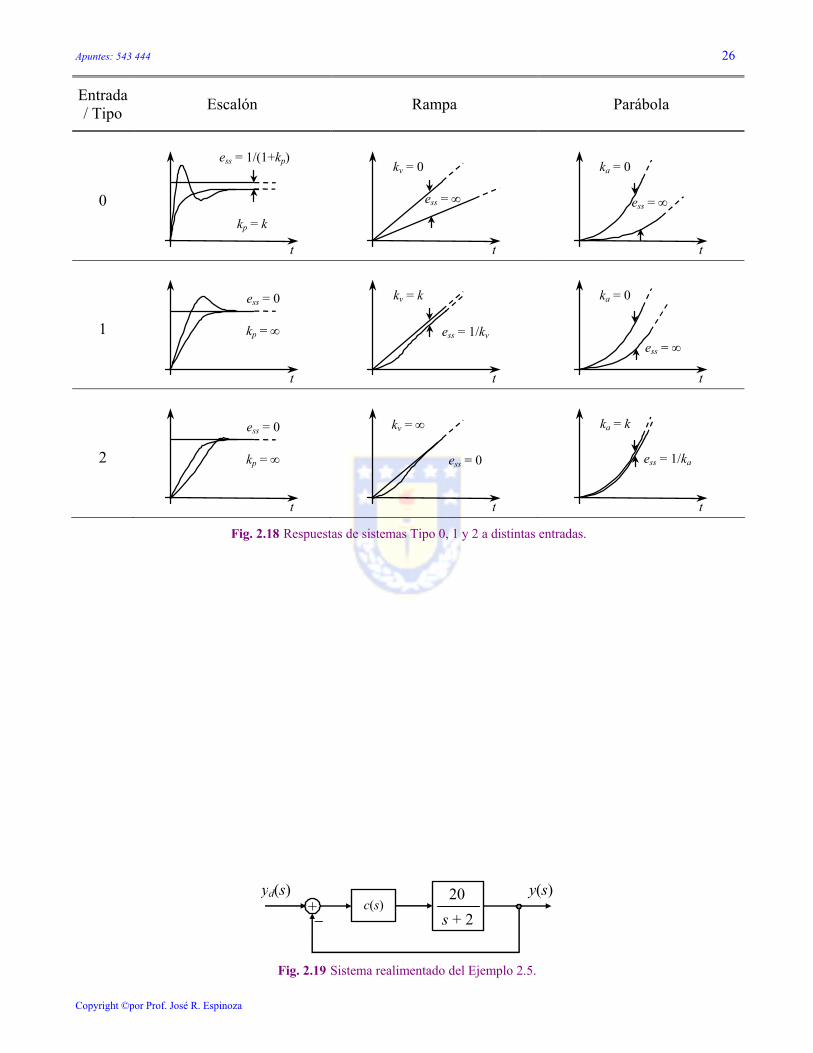
B . Clasificación de Sistemas en Tipo N.
Def.: Se define la F. de T. en lazo directo (L.D.) como g(s)r(s) = l(s) en el diagrama de la Fig. 2.15 con expresión general de la forma,
)1(
1)()()( 11
11
++++++
== −−
−−
L
Lq
qN
mm
mm
sasassbsbkslsrsg .
Def.: Sea un sistema cuya F. de T. en L.D. está dada por la expresión anterior. Entonces se dice que el sistema es de tipo N, en donde N es el número de polos en s = 0 que posee g(s)r(s).
Ejemplo 2.4. En el ejemplo anterior con el controlador kc, 1)()(
1
1
+τ=
skksrsg c , por tanto el sistema es de Tipo 0 y entonces,
111
kke
css +
= . Por otro lado, con el controlador kc/s, )1(
)()(1
1
+τ=
sskksrsg c , por lo tanto el sistema es de Tipo 1 y entonces,
0=sse . Se puede observar que si el sistema tiene N ≥ 1, el ess es cero para entrada escalón, es decir, basta tener un integrador para lograr cero ess. ♣
C . Coeficientes de Error Estático. Se definen tres coeficientes de acuerdo a las entradas normalizadas escalón, rampa y parábola. - De posición kp. Se define para entrada escalón.
ps
ssss ksrsgsrsgssrsg
se+
=+
=+
=+
=→
→→ 11
)()(lím11
)()(11lím1
)()(11lím
000
.
Por lo tanto, )()(lím0
srsgks
p→
= .
i) Para sistemas Tipo 0: kp = k ⇒ kess += 11 . ii) Para sistemas Tipo 1: kp = ∞ ⇒ 0=sse . iii) Para sistemas Tipo 2: kp = ∞ ⇒ 0=sse .
- De velocidad kv. Se define para entrada rampa.
vs
ssss kshssgsshsgsshsg
se 1)()(lím
11)()(1
1lím1)()(1
1lím0
020==
+=
+=
→→→
.
Por lo tanto, )()(lím0
srssgks
v→
= .
i) Para sistemas Tipo 0: kv = k ⇒ ∞=sse . ii) Para sistemas Tipo 1: kv = ∞ ⇒ kess 1= . iii) Para sistemas Tipo 2: kv = ∞ ⇒ 0=sse .

Apuntes: 543 444 25
Copyright ©por Prof. José R. Espinoza
- De aceleración ka. Se define para entrada parábola.
as
ssss ksrsgsssrsgssrsg
se 1)()(lím
11)()(1
1lím1)()(1
1lím 2
0
2030==
+=
+=
→→→
.
Por lo tanto, )()(lím 2
0srsgsk
sa
→= .
i) Para sistemas Tipo 0: ka = 0 ⇒ ∞=sse . ii) Para sistemas Tipo 1: ka = 0 ⇒ ∞=sse . iii) Para sistemas Tipo 2: ka = k ⇒ kess 1= .
Un resumen de los coeficientes y error en estado estacionario se encuentran en la tabla siguiente.
Entrada Escalón, s1 Rampa, 21 s Parábola, 31 s
Cte. de error )()(lím0
srsgks
p→
= )()(lím0
shssgks
v→
= )()(lím 2
0srsgsk
sa
→=
Tipo de Sistema Error de estado permanente
0 pk+11 ∞ ∞
1 0 vk1 ∞
2 0 0 ak1
Finalmente se esbozan los tipos de respuestas para cada caso en la Fig. 2.18.
2.5 Diseño de Controladores.
Dado un proceso con F. de T. en L.D. g(s)r(s), se puede diseñar un controlador tal que satisfaga requerimientos de error en estado estacionario. Esto se ilustra en el siguiente ejemplo. Ejemplo 2.5. Sea el sistema dado por la Fig. 2.19. (a) Diseñe el controlador de manera que se logre un ess = 5% para entrada escalón. (b) Diseñe el controlador de manera que ess = 5% para entrada rampa. R.: (a) Dado que la planta es Tipo 0, para que haya error de estado estacionario igual al 5% el controlador no debe tener integradores, a lo más una ganancia para
obtener lo requerido. Por lo tanto, 2
20)(+
=s
ksgr c , pero dado que k
ess+
==1
105.0 , entonces,
3.1101105.010
220
105.01
220)( =⇒
+=⇒==⇒
+= c
cc
cc kk
kkks
ksgr . (b) Dado que la planta es tipo 0, un controlador
con solo ganancia genera ess = ∞ para entrada rampa. Por lo tanto el controlador debe tener además un integrador. Luego,
220)(+
=ss
ksgr c , pero dado que k
ess105.0 == , entonces, 2
10105.0
)15.0(110)( =⇒=⇒
+= c
cc k
kssksgr . ♣
Apuntes: 543 444 26
Copyright ©por Prof. José R. Espinoza
Entrada / Tipo Escalón Rampa Parábola
0
t
ess = 1/(1+kp)
kp = k
t
ess = ∞
kv = 0
t
ess = ∞
ka = 0
1
t
ess = 0
kp = ∞
t
ess = 1/kv
kv = k
t
ess = ∞
ka = 0
2
t
ess = 0
kp = ∞
t
ess = 0
kv = ∞
t
ess = 1/ka
ka = k
Fig. 2.18 Respuestas de sistemas Tipo 0, 1 y 2 a distintas entradas.
20 y(s)
s + 2c(s)
yd(s) + −
Fig. 2.19 Sistema realimentado del Ejemplo 2.5.

Apuntes: 543 444 27
Copyright ©por Prof. José R. Espinoza
3 Régimen Transiente en Sistemas Realimentados.
El control tiene por objetivo fundamental dar características estáticas y dinámicas específicas a determinadas variables de los sistemas de acuerdo a requerimientos particulares. Por ejemplo, obtener cero error en estado estacionario y no permitir que la variable controlada exceda ciertos límites en forma dinámicas. En este capítulo se revisan los conceptos fundamentales asociados a la dinámica de sistemas. Entre éstos se cuenta el sobrepaso y el tiempo de asentamiento. En particular, se revisan exhaustivamente los sistemas de primer y de segundo orden, con y sin retardo. Esto debido a que sistemas de orden mayor se pueden tratar aproximadamente como sistemas de segundo orden con retardo.
3.1 Comportamiento Transitorio de Sistemas de Primer Orden.
A . Sistema de 1er Orden. Un sistema de primer orden queda definido por la F. de T.:
11
1
+τ sk ,
que tiene por respuesta a entrada escalón a,
)1(11
)( 1/11
1
111
1
11 τ−−
−− −=
τ+−=
⋅
+τ= tek
sk
sk
sskty LL .
Al considerar una constante de tiempo τ2 > τ1 se tiene un sistema más lento, lo que tiene asociado un polo más cerca del origen, Fig. 3.1.
B . Sistema de 1er Orden más un Polo. Si se agrega un polo al sistema de primer orden anterior queda el sistema definido por la siguiente F. de T.,
σ
jω
−1/τ2 −1/τ1
τ2 > τ1
más lento A
t
τ2 > τ1
k1
τ1 τ2
0.63k1A
a) b)
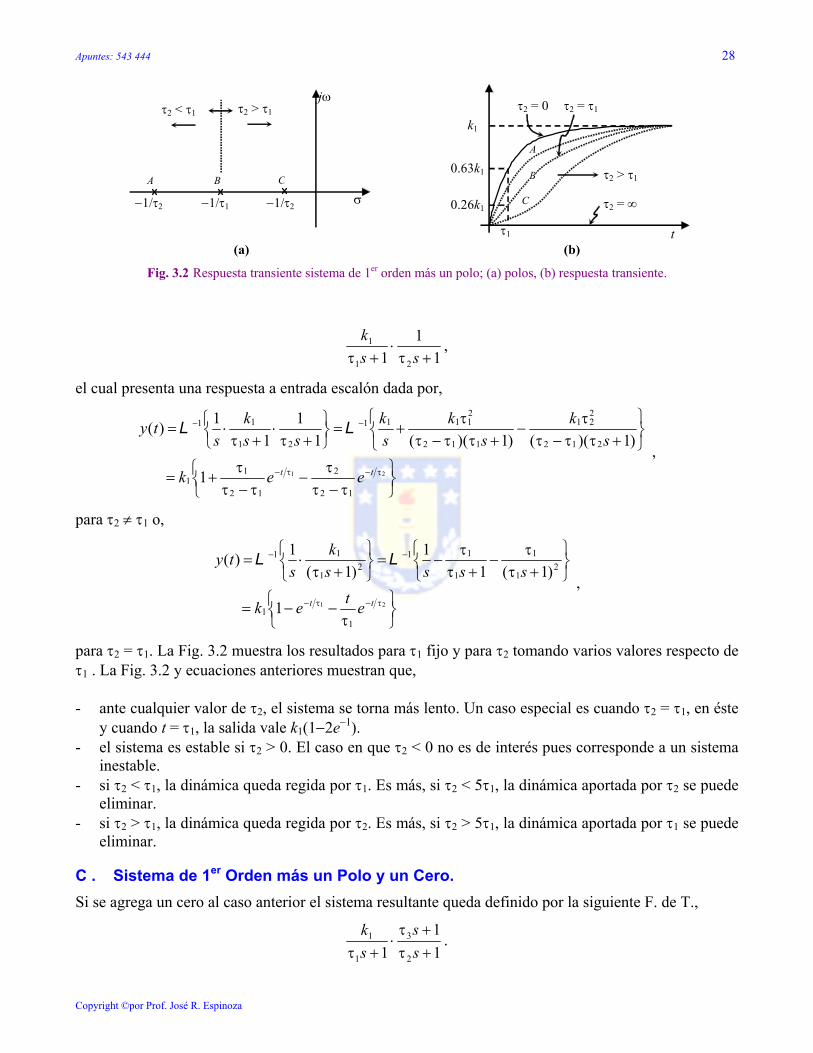
Fig. 3.1 Respuesta transiente sistema de 1er orden; (a) polos, (b) respuesta transiente.
Apuntes: 543 444 28
Copyright ©por Prof. José R. Espinoza
1
11 21
1
+τ⋅
+τ ssk ,
el cual presenta una respuesta a entrada escalón dada por,
τ−ττ
−τ−τ
τ+=
+ττ−ττ
−+ττ−τ
τ+=
+τ⋅
+τ⋅=
τ−τ−
−−
21
12
2
12
11
212
221
112
21111
21
11
1
)1)(()1)((11
11)(
tt eek
sk
sk
sk
ssk
sty LL
,
para τ2 ≠ τ1 o,
τ−−=
+ττ
−+τ
τ−=
+τ⋅=
τ−τ−
−−
21
11
21
1
1
112
1
11
1
)1(11
)1(1)(
tt etek
ssssk
sty LL
,
para τ2 = τ1. La Fig. 3.2 muestra los resultados para τ1 fijo y para τ2 tomando varios valores respecto de τ1 . La Fig. 3.2 y ecuaciones anteriores muestran que,
- ante cualquier valor de τ2, el sistema se torna más lento. Un caso especial es cuando τ2 = τ1, en éste y cuando t = τ1, la salida vale k1(1−2e−1).
- el sistema es estable si τ2 > 0. El caso en que τ2 < 0 no es de interés pues corresponde a un sistema inestable.
- si τ2 < τ1, la dinámica queda regida por τ1. Es más, si τ2 < 5τ1, la dinámica aportada por τ2 se puede eliminar.
- si τ2 > τ1, la dinámica queda regida por τ2. Es más, si τ2 > 5τ1, la dinámica aportada por τ1 se puede eliminar.
C . Sistema de 1er Orden más un Polo y un Cero. Si se agrega un cero al caso anterior el sistema resultante queda definido por la siguiente F. de T.,
11
1 2
3
1
1
+τ+τ
⋅+τ s
ssk .
−1/τ2 σ
jω
−1/τ1
τ2 > τ1
A
−1/τ2
B C
τ2 < τ1
k1
0.63k1
A
tτ1
τ2 = ∞
τ2 > τ1 B
C0.26k1
τ2 = 0 τ2 = τ1
(a) (b)
Fig. 3.2 Respuesta transiente sistema de 1er orden más un polo; (a) polos, (b) respuesta transiente.

Apuntes: 543 444 29
Copyright ©por Prof. José R. Espinoza
Asumiendo que τ2 > τ1, los polos y ceros en el plano complejo quedan dados por la Fig. 3.3(a), en donde el cero puede estar ubicado arbitrariamente en A, A', B, B', C y D. En este caso, la respuesta a escalón queda dada por:
τ−ττ−τ
−τ−ττ−τ
+=
+ττ−ττ−ττ
−+ττ−τ
τ−ττ+=
+τ+τ
⋅+τ
⋅=
τ−τ−
−−
21
12
32
12
311
212
322
112
31111
2
3
1
111
1
)1)(()(
)1)(()(1
11
11)(
tt eek
sssk
ss
sk
skty LL
,
la ecuación anterior indica que el aporte del cero es sólo como atenuación, pero no aporta dinámica alguna. Si τ2 = τ1 la respuesta es,
ττ
−τ
−−=
+ττ−τ
−+τ
τ−=
+τ+τ
⋅= τ−τ−−− )1(1)1()1(
1)1(11)(
1
3
112
1
31
1
1112
1
311
11 tt eteksss
kss
skty LL .
las ecuaciones anteriores están bosquejadas en la Fig. 3.3(b) de donde se deduce que, - si τ3 << τ1; es decir, el cero está muy a la izquierda del plano complejo, su efecto se puede
despreciar, - si el cero está muy cercano al origen, este predomina y por ende dicta la dinámica del sistema,
específicamente, se comporta como un derivador, - cuando el cero está a la derecha de −1/τ2, el sistema presenta un sobrepaso (derivador), - cuando el cero está a la derecha del plano complejo (es decir, τ3 < 0) el sistema presenta un
sobrepaso negativo. Ceros en el plano derecho corresponden a un sistema de fase no mínima. Esto se puede demostrar si se muestra que la pendiente es negativa a la partida considerando c.i. nulas. Así, la pendiente a la partida es,
21
31
2
3
1
1
2
3
1
1
2
3
1
1
0
/1/1
/1 lím
11
1 lím
11
11 lím)(
τττ
=
+τ+τ
⋅+τ
=+τ+τ
⋅+τ
=
+τ+τ
⋅+τ
⋅=
∞→∞→
∞→= +
kss
sk
ss
ssk
ss
sk
sss
dttdy
ss
st
,
dado que τ3 es negativo, d/dt|t = 0+ es negativo, por lo que se tiene un sobrepaso negativo.
σ
jω
−1/τ2 −1/τ1
A
−1/τ3
B C A’ B’ D
t
τ2 = τ3
A
B
C
D
τ1 = τ3
τ3 = 0
(a) (b)
Fig. 3.3 Respuesta transiente sistema de 1er orden más polo y cero; (a) polos y ceros, (b) respuesta transiente.
Apuntes: 543 444 30
Copyright ©por Prof. José R. Espinoza
3.2 Comportamiento Transitorio de Sistemas de Segundo Orden.
Para analizar el sistema de segundo orden se considera la respuesta estándar.
A . Tipos de Respuestas.
Sea el sistema en L.A. )(
)(pss
ksg+
= , entonces, el sistema en L.C. con realimentación unitaria, queda
definido por la F. de T.,
kpss
ksh++
= 2)( ,
que puede ser representada por la forma generalizada,
22
2
2)(
nn
n
sssh
ω+ζω+ω
= ,
donde, ζ es el coeficiente de amortiguamiento y ωn es la frecuencia natural de oscilación (frecuencia no amortiguada). Además, se definen ζωn = σ como la constante de amortiguamiento y ωd = 21 ζ−ωn como la frecuencia de oscilación (frecuencia amortiguada) la cual tiene sentido en el caso que ζ < 1. Estas definiciones se obtienen de derivar las raíces del polinomio característico de la F. de T. dado por
22 2 nn ss ω+ζω+ ,
las cuales son,
2
22
2,1
12
4)2(2
ζ−ω±ζω−=
ω−ζω±ζω−=λ
nn
nnn
j
.
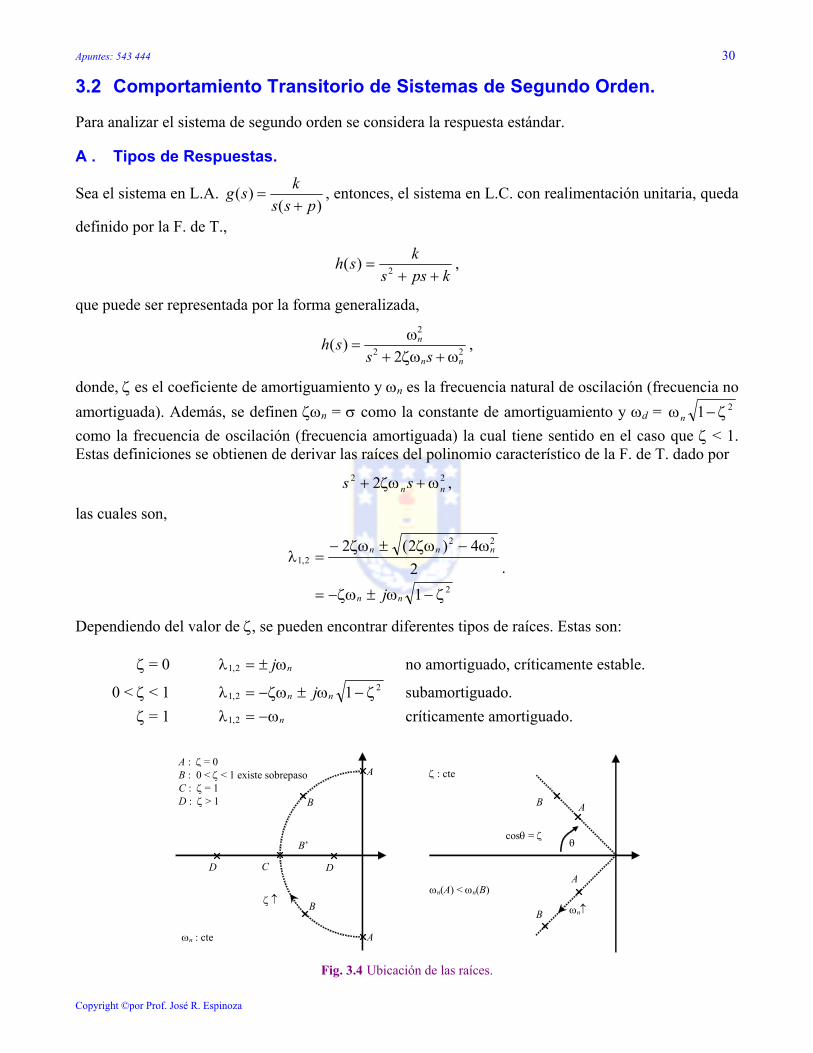
Dependiendo del valor de ζ, se pueden encontrar diferentes tipos de raíces. Estas son: ζ = 0 njω±=λ 2,1 no amortiguado, críticamente estable.
0 < ζ < 1 22,1 1 ζ−ω±ζω−=λ nn j subamortiguado.
ζ = 1 nω−=λ 2,1 críticamente amortiguado.
A : ζ = 0 B : 0 < ζ < 1 existe sobrepaso C : ζ = 1 D : ζ > 1
A
B
C
B
B’
D
ζ ↑
ωn : cte
ζ : cte
cosθ = ζ
ωn↑
A
θ
A
B ωn(A) < ωn(B)
D
B
A
Fig. 3.4 Ubicación de las raíces.
Apuntes: 543 444 31
Copyright ©por Prof. José R. Espinoza
ζ > 1 122,1 −ζω±ζω−=λ nn j sobreamortiguado.
Las cuales se ubican en el plano complejo como se ilustra en la Fig. 3.4. La respuesta a entrada escalón del sistema de segundo orden estándar para 0 < ζ < 1 está dada por,
( )
ζζ−
+ζ−ωζ−
−=
⋅ω+ζω+
ω= −ζω−−
212
222
21 1
tg 1sen1
1112
)( tesss
ty nt
nn
n nL ,
la cual se grafica en la Fig. 3.5.
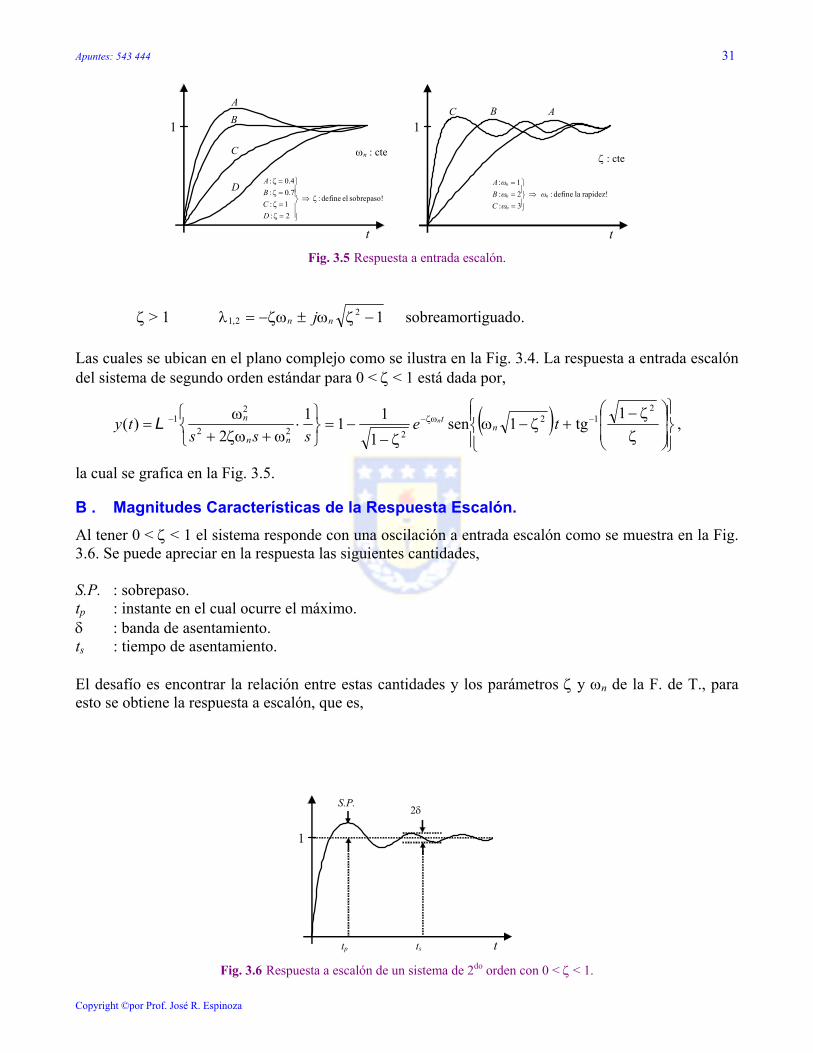
B . Magnitudes Características de la Respuesta Escalón. Al tener 0 < ζ < 1 el sistema responde con una oscilación a entrada escalón como se muestra en la Fig. 3.6. Se puede apreciar en la respuesta las siguientes cantidades, S.P. : sobrepaso. tp : instante en el cual ocurre el máximo. δ : banda de asentamiento. ts : tiempo de asentamiento. El desafío es encontrar la relación entre estas cantidades y los parámetros ζ y ωn de la F. de T., para esto se obtiene la respuesta a escalón, que es,
t
1
A
B
C
D
t
1ABC
ωn : cte ζ : cte
sobrepaso! el define :
2 :1 :
7.0 :4.0 :
ζ⇒
=ζ=ζ=ζ=ζ
DCBA
rapidez!la define : 3 :2 :1 :
n
n
n
n
ωωCωBωA
⇒
===
Fig. 3.5 Respuesta a entrada escalón.
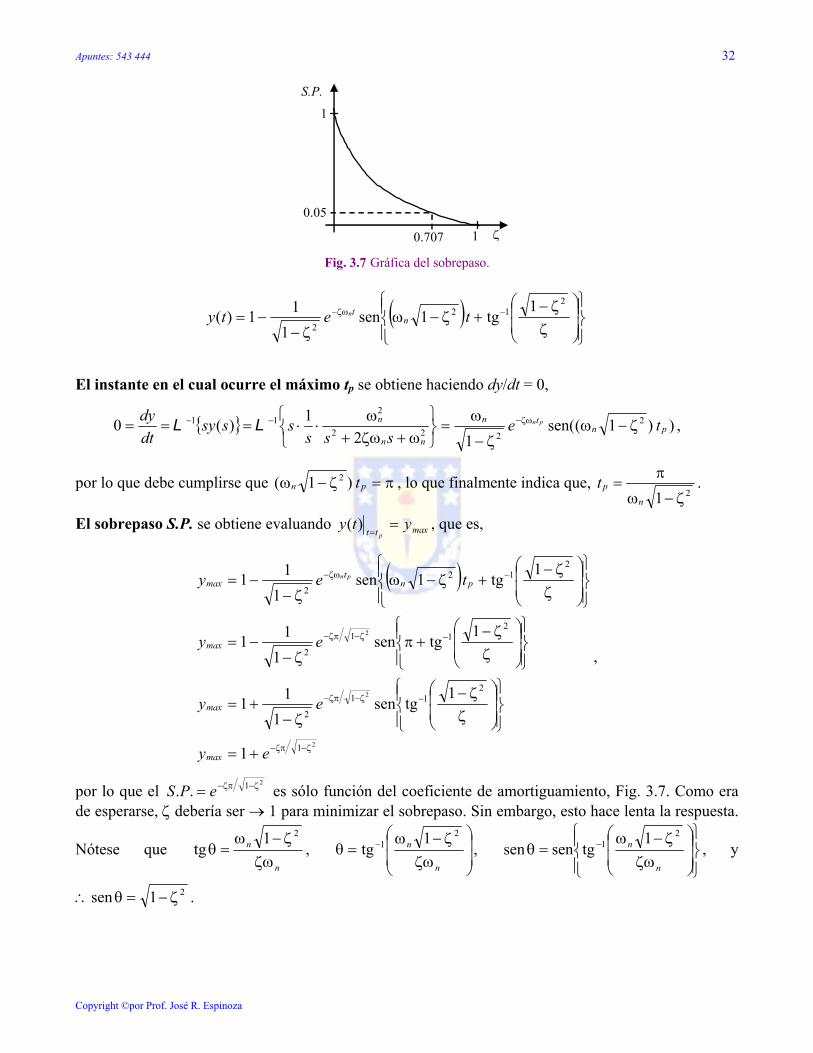
t
1
2δ
tp
S.P.
ts Fig. 3.6 Respuesta a escalón de un sistema de 2do orden con 0 < ζ < 1.
Apuntes: 543 444 32
Copyright ©por Prof. José R. Espinoza
( )
ζζ−
+ζ−ωζ−
−= −ζω−2
12
2
1tg 1sen
111)( tety n
tn
El instante en el cual ocurre el máximo tp se obtiene haciendo dy/dt = 0,
) )1(sen(12
1)(0 2
222
211
pntn
nn
n tesss
sssydtdy pn ζ−ω
ζ−
ω=
ω+ζω+ω
⋅⋅=== ζω−−− LL ,
por lo que debe cumplirse que π=ζ−ω pn t )1( 2 , lo que finalmente indica que, 21 ζ−ω
π=
n
pt .
El sobrepaso S.P. se obtiene evaluando maxttyty
p=
=)( , que es,
( )
2
2
2
1
211
2
211
2
212
2
1
1tgsen
111
1tgsen
111
1tg 1sen
111
ζ−ζπ−
−ζ−ζπ−
−ζ−ζπ−
−ζω−
+=
ζζ−
ζ−+=
ζζ−
+πζ−
−=
ζζ−
+ζ−ωζ−
−=
ey
ey
ey
tey
max
max
max
pnt
maxpn
,
por lo que el 21.. ζ−ζπ−= ePS es sólo función del coeficiente de amortiguamiento, Fig. 3.7. Como era
de esperarse, ζ debería ser → 1 para minimizar el sobrepaso. Sin embargo, esto hace lenta la respuesta.
Nótese que n
n
ζωζ−ω
=θ21
tg ,
ζωζ−ω
=θ −
n
n2
1 1tg ,
ζωζ−ω
=θ −
n
n2
1 1tgsensen , y
∴ 21sen ζ−=θ .
ζ
1
0.707
0.05
1
S.P.
Fig. 3.7 Gráfica del sobrepaso.

Apuntes: 543 444 33
Copyright ©por Prof. José R. Espinoza
La banda de asentamiento δ se asume conocida y el tiempo de asentamiento ts es el instante en que la salida entra en esta banda. Específicamente, ts se encuentra asumiendo que y entra a la banda dada por 1 + tne ζω− . Por lo tanto, snte ζω−=δ y con esto,
n
stζω
δ=
)/1ln( .
Ejemplo 3.1. Dado g(s) = k/(s(s+p)), calcular k y p tal que S.P. ≤ 5% y ts ≤ 4 s para δ = 2% en L.C. para una
realimentación unitaria. R.: Como 4)/1ln(≤
ζωδ
=n
st , entonces 14
)02.0/1ln(≅≤ζωn y como 05.0..
21 ≤= ζ−ζπ−ePS ,
entonces 707.0≥ζ . Dado que ζ=θcos , entonces º45cos 1 =ζ≤θ − . La región donde se cumplen ambas condiciones se
muestra en la Fig. 3.8. En el límite, 1−=ζω− n ⇒ 4142.1=ωn , 22 =ω= nk , 22 =ζω= np . ♣
3.3 Especificaciones en el Dominio de la Frecuencia .
Los valores característicos anteriores tienen estrecha relación con la respuesta en frecuencia del sistema.
A . Terminología. La F. de T. de un sistema realimentado tienen una expresión generalizada del tipo,
)()(1
)()()( sh
sgrsg
sysy
d=
+= ,
y se asume que tiene una gráfica como la ilustrada en la Fig. 3.9. Por lo tanto, se pueden definir los siguientes conceptos.
Def.: hp es el valor máximo de |)(| ωjh . Se conoce como pico de resonancia.
Def.: ωp es la frecuencia en la cual se produce el pico de resonancia. Se conoce como frecuencia de resonancia.
θ
−ζωn
Fig. 3.8 Región para la ubicación de las raíces para el Ejemplo 3.1.

Apuntes: 543 444 34
Copyright ©por Prof. José R. Espinoza
Def.: El ancho de banda B.W. es la frecuencia a la cual |)(| ωjh cae al 70.7% del valor de |)(| ωjh a frecuencia cero.
B . hp, ωp y B.W. para un Sistema de Segundo Orden. La F. de T. en L.C. de un sistema de segundo orden es de la forma,
22
2
2)(
nn
n
sssh
ω+ζω+ω
= .
Por lo tanto,
nnnn
n
nn
n
jjjjjh
ωζω+ωω−=
ωζω+ω−ωω
=ω+ωζω+ω
ω=ω
/2)/(11
22)()( 222
2
22
2
, con nu ωω= / , se
puede escribir, uju
juhζ+−
=21
1)( 2 , por lo que el módulo es, 222 )2()1(
1|)(|uu
juhζ+−
= y su
máximo se obtiene derivando la expresión anterior. Así, |)(| juhdud =
( )3222
22
)2()1(2
242)1(2
uu
uuu
ζ+−
ζ+−−− . Si la
expresión anterior es 0 para u = up = ωp/ωn, se tiene que, 0844 23 =ζ++− ppp uuu ó 0)21(4 22 =ζ++− pp uu , de donde, 22 21 ζ−=pu , por lo que,
221 ζ−ω=ω np ,
lo que tiene sentido para 707.02/20 =≤ζ< . Con este resultado se puede encontrar hp como,
22222222 12
1)21(4
1)21(4)2(
1ζ−ζ
=ζ−+ζζ
=ζ−ζ+ζ
=ph , 2/20 ≤ζ< .
El ancho de banda se determina haciendo |)0(|2
1|)(| B.W. hjuh = , con nu ω= /B.W.B.W. , es decir,
21
)2()1(1
2B.W.
22B.W.
=ζ+− uu
, así , 2)2()1( 2B.W.
22B.W. =ζ+− uu , 24)(21 2
B.W.222
B.W.2B.W. =ζ++− uuu ,
01)24)(()( 22B.W.
22B.W. =−−ζ+ uu , esta última ecuación corresponde a una ecuación de segundo orden
ω
h(0)
B.W.
hp
ωp
0.707h(0)
h(s)s = jω
Fig. 3.9 Respuesta en frecuencia de h(s).
Apuntes: 543 444 35
Copyright ©por Prof. José R. Espinoza
con la incógnita 2B.W.u , así,
24)24(42 222
2B.W.
+−ζ±ζ−=u , 24421 2422
B.W. +ζ−ζ+ζ−=u , por lo
que finalmente,
24421B.W. 242 +ζ−ζ+ζ−ω= n .
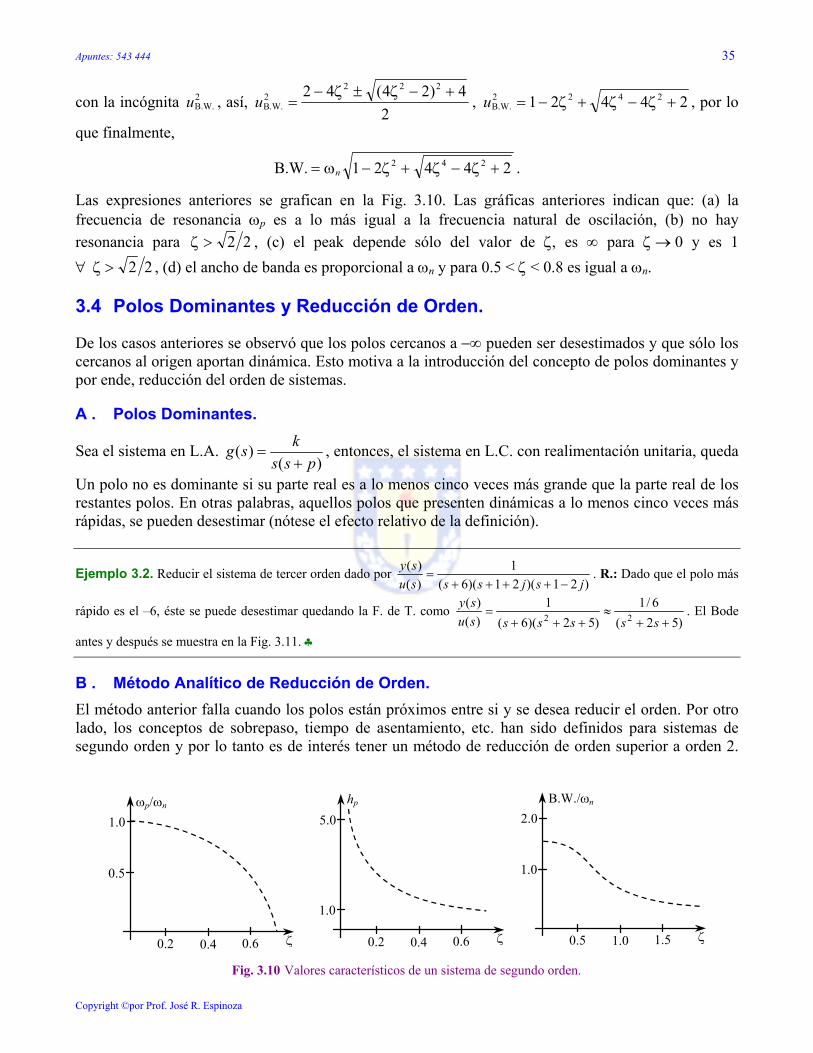
Las expresiones anteriores se grafican en la Fig. 3.10. Las gráficas anteriores indican que: (a) la frecuencia de resonancia ωp es a lo más igual a la frecuencia natural de oscilación, (b) no hay resonancia para 22>ζ , (c) el peak depende sólo del valor de ζ, es ∞ para ζ → 0 y es 1 ∀ 22>ζ , (d) el ancho de banda es proporcional a ωn y para 0.5 < ζ < 0.8 es igual a ωn.
3.4 Polos Dominantes y Reducción de Orden.
De los casos anteriores se observó que los polos cercanos a −∞ pueden ser desestimados y que sólo los cercanos al origen aportan dinámica. Esto motiva a la introducción del concepto de polos dominantes y por ende, reducción del orden de sistemas.
A . Polos Dominantes.
Sea el sistema en L.A. )(
)(pss
ksg+
= , entonces, el sistema en L.C. con realimentación unitaria, queda
Un polo no es dominante si su parte real es a lo menos cinco veces más grande que la parte real de los restantes polos. En otras palabras, aquellos polos que presenten dinámicas a lo menos cinco veces más rápidas, se pueden desestimar (nótese el efecto relativo de la definición).
Ejemplo 3.2. Reducir el sistema de tercer orden dado por )21)(21)(6(
1)()(
jsjsssusy
−++++= . R.: Dado que el polo más
rápido es el –6, éste se puede desestimar quedando la F. de T. como )52(
6/1)52)(6(
1)()(
22 ++≈
+++=
ssssssusy . El Bode
antes y después se muestra en la Fig. 3.11. ♣
B . Método Analítico de Reducción de Orden. El método anterior falla cuando los polos están próximos entre si y se desea reducir el orden. Por otro lado, los conceptos de sobrepaso, tiempo de asentamiento, etc. han sido definidos para sistemas de segundo orden y por lo tanto es de interés tener un método de reducción de orden superior a orden 2.
ζ0.6
ωp/ωn
1.0
0.5
0.40.2 ζ0.6
hp
5.0
0.40.2 ζ1.5
B.W./ωn
2.0
1.0
1.00.5
1.0
Fig. 3.10 Valores característicos de un sistema de segundo orden.

Apuntes: 543 444 36
Copyright ©por Prof. José R. Espinoza
Sean las F. de T.,
gnpg
sdscksl
mnsasbksh
gg
pp
nn
mm
>
≥++++
=
≥++++
=
11)(
11)(
L
LL
L
.
Se desea: i) que l(s) y h(s) tengan la misma ganancia d.c., ii) que tengan aproximadamente la misma respuesta en frecuencia, es decir, h(s)/l(s) |s = jω ≈ 1 para un amplio rango. Para esto se deben obtener los coeficientes cp y dg. Primero se definen,
)()()( sMdsdsM k
kk = y )()()( s
dsds k
kk ∆=∆ ,
donde )()(
)()(
ssM
slsh
∆= . Además se definen,
∑=
−+
−−
=q
k
kqkqk
q kqkMMM
2
0
)2()(
2 )!2(!)0()0()1( y ∑
=
−+
−∆∆−
=∆q
k
kqkqk
q kqk
2
0
)2()(
2 )!2(!)0()0()1(
con q = 0, 1, 2, ···. Entonces, los coeficientes c y d son obtenidos de igualar M2q = ∆2q con q = 1, 2, ... hasta el número requerido de coeficiente.
Ejemplo 3.3. 3223 )6/1()6/11(11
61161)(
sssssssH
+++=
+++= . Sea 2
2111)(
sdsdsL
++= ,
⇒ 221
)0( 1)( sdsdsM ++= ; 1)0()0( =M
sddsM 21)1( 2)( += ; 1
)1( )0( dM =
2)2( 2)( dsM = ; 2
)2( 2)0( dM =
0)()3( =sM ; 0)0()3( =M ⇒ 32)0( )6/1()6/11(1)( ssss +++=∆ ; 1)0()0( =∆
2)1( )6/3(26/11)( sss ++=∆ ; 6/11)0()1( =∆
ss +=∆ 2)()2( ; 2)0()2( =∆
1)()3( =∆ s ; 1)0()3( =∆
ω10.1 10
| |
σ
jω
−6 −1
2j
−2j
AB
ω1 0.1 10
∠
A B
Fig. 3.11 Reducción de orden (A: exacto, B: aproximado).
Apuntes: 543 444 37
Copyright ©por Prof. José R. Espinoza
⇒ q = 1 2122
212
)0()2(3)1()1(2)2()0(1
2 2)!22(!2
)0()0()1()!12(!1
)0()0()1()!02(!0
)0()0()1(ddddd
MMMMMMM +−=−+−=
−−
+−
−+
−−
=
36/49136/1211)!22(!2
)0()0()1()!12(!1
)0()0()1()!02(!0
)0()0()1( )0()2(3)1()1(2)2()0(1
2 =−+−=−
∆∆−+
−∆∆−
+−
∆∆−=∆
Dado que M2 = ∆2 ⇒ 36/492 212 =+− dd
⇒ q = 2 Dado que M4 = ∆4 ⇒ 18/722 =d
De las dos ecuaciones anteriores se deduce que d1 = 1.615 y d2 = 0.625
⇒ 60.1584.2
60.16116
6)(223 ++
≈+++
=sssss
sH ⇒ 021.1265.1
584.2260.12
=ζ=ω
=ζω=ω n
n
n no hay sobrepaso!. ♣
3.5 Sistemas con Retardo.
Los retardos siempre están presentes en los sistemas físicos. Afortunadamente, en muchos de ellos son de magnitudes no comparables a las dinámicas del sistema y por lo tanto se pueden desestimar. Sin embargo, los sistemas que se caracterizan por el transporte de material (p.ej., minería, biología humana, etc.) en donde los retardos son cruciales.
A . Ejemplo. Se presentan en sistemas caracterizados por transporte de materiales. Por ejemplo, correas transportadoras como ilustrado en la Fig. 3.12. En general, si y(t) = u(t − tr), entonces, stresusy −= )()( . Sea un caso particular de primer orden,
rstp esksg −
+τ=
1)( .
¿ Qué aporta e-trs en términos de ceros, polos y estabilidad ? El retraso se caracteriza por,
rjs
st
jsst
tee
r
r
ω−=
=
ω=−
ω=−
)arg(1)mod(
,
por lo que e-trs sólo adiciona un retraso y por lo tanto g(s) es estable si y sólo si sus polos son estables. La interrogante de mayor importancia es, ¿ qué sucede si se agrega un lazo de realimentación unitaria ?. La F. de T. en L.C. considerando una ganancia kc es,
d fe
fs
v
h
m fe’
fe’
fetr
Fig. 3.12 Sistema con retardo.
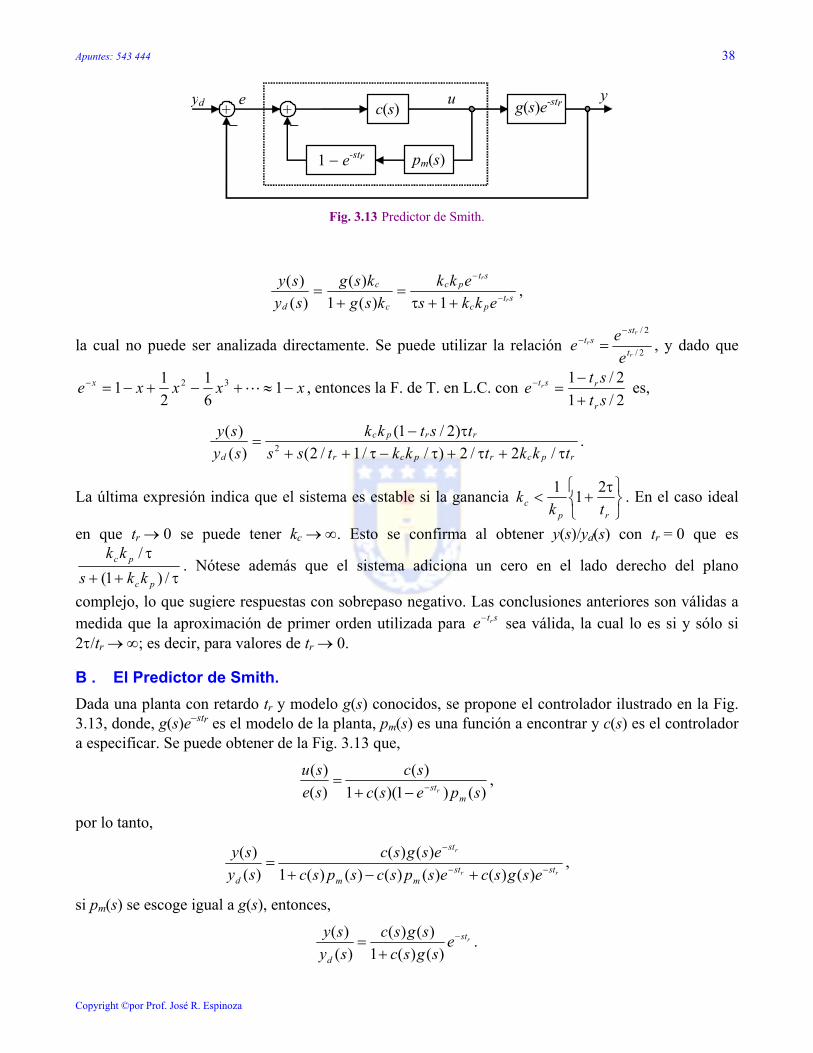
Apuntes: 543 444 38
Copyright ©por Prof. José R. Espinoza
stpc
stpc
c
c
dr
r
ekksekk
ksgksg
sysy
−
−
++τ=
+=
1)(1)(
)()( ,
la cual no puede ser analizada directamente. Se puede utilizar la relación 2/
2/
r
rr
t
stst
eee
−− = , y dado que
xxxxe x −≈+−+−=− 161
211 32 L , entonces la F. de T. en L.C. con
2/12/1
stste
r
rstr
+−
=− es,
rpcrpcr
rrpc
d tkktkktsststkk
sysy
τ+τ+τ−τ++τ−
=/2/2)//1/2(
)2/1()()(
2 .
La última expresión indica que el sistema es estable si la ganancia
τ
+<rp
c tkk 211 . En el caso ideal
en que tr → 0 se puede tener kc → ∞. Esto se confirma al obtener y(s)/yd(s) con tr = 0 que es
τ++
τ
/)1(/
pc
pc
kkskk
. Nótese además que el sistema adiciona un cero en el lado derecho del plano
complejo, lo que sugiere respuestas con sobrepaso negativo. Las conclusiones anteriores son válidas a medida que la aproximación de primer orden utilizada para stre− sea válida, la cual lo es si y sólo si 2τ/tr → ∞; es decir, para valores de tr → 0.
B . El Predictor de Smith. Dada una planta con retardo tr y modelo g(s) conocidos, se propone el controlador ilustrado en la Fig. 3.13, donde, g(s)e−str es el modelo de la planta, pm(s) es una función a encontrar y c(s) es el controlador a especificar. Se puede obtener de la Fig. 3.13 que,
)()1)((1
)()()(
spescsc
sesu
mstr−−+
= ,
por lo tanto,
rr
r
ststmm
st
d esgscespscspscesgsc
sysy
−−
−
+−+=
)()()()()()(1)()(
)()( ,
si pm(s) se escoge igual a g(s), entonces,
rst
d
esgsc
sgscsysy −
+=
)()(1)()(
)()( .
yd + −
1 − e-str pm(s)
c(s) g(s)e-str+ −
e u y
Fig. 3.13 Predictor de Smith.
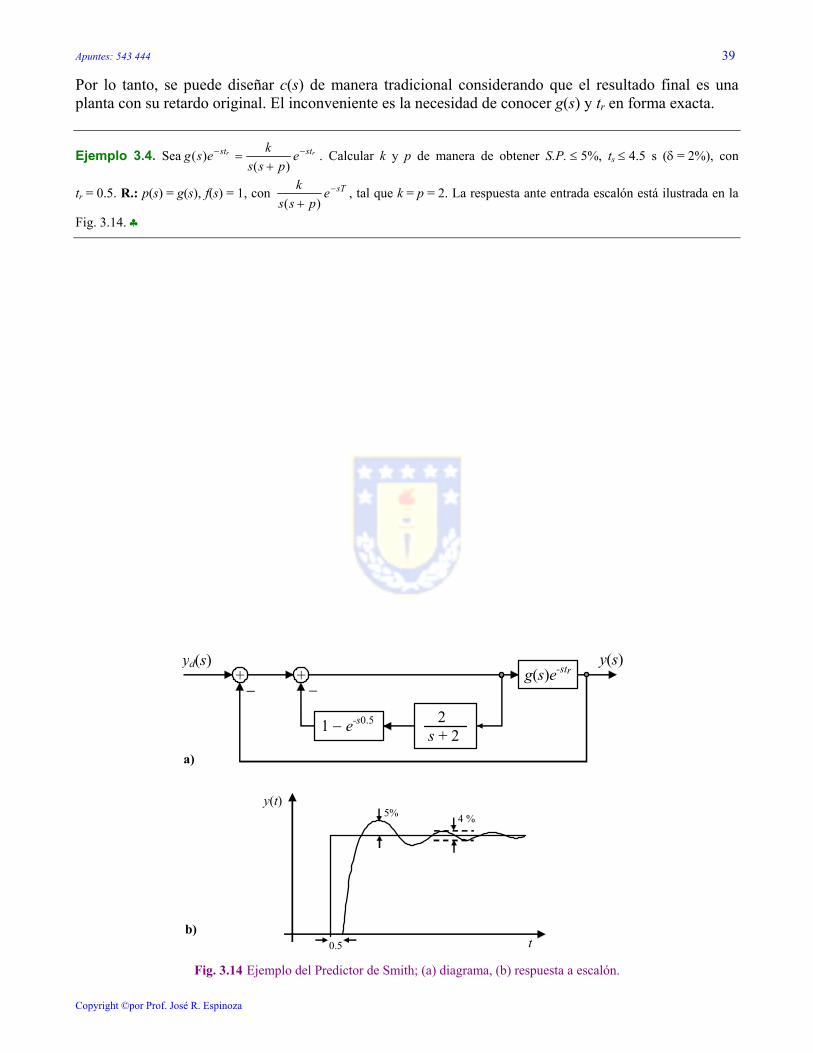
Apuntes: 543 444 39
Copyright ©por Prof. José R. Espinoza
Por lo tanto, se puede diseñar c(s) de manera tradicional considerando que el resultado final es una planta con su retardo original. El inconveniente es la necesidad de conocer g(s) y tr en forma exacta.
Ejemplo 3.4. Sea rr stst epss
kesg −−
+=
)()( . Calcular k y p de manera de obtener S.P. ≤ 5%, ts ≤ 4.5 s (δ = 2%), con
tr = 0.5. R.: p(s) = g(s), f(s) = 1, con sTepss
k −
+ )(, tal que k = p = 2. La respuesta ante entrada escalón está ilustrada en la
Fig. 3.14. ♣
t
y(t)
0.5
5% 4 %
yd(s) +
−
1 − e-s0.5
g(s)e-str +−
y(s)
2s + 2
a)
b)
Fig. 3.14 Ejemplo del Predictor de Smith; (a) diagrama, (b) respuesta a escalón.
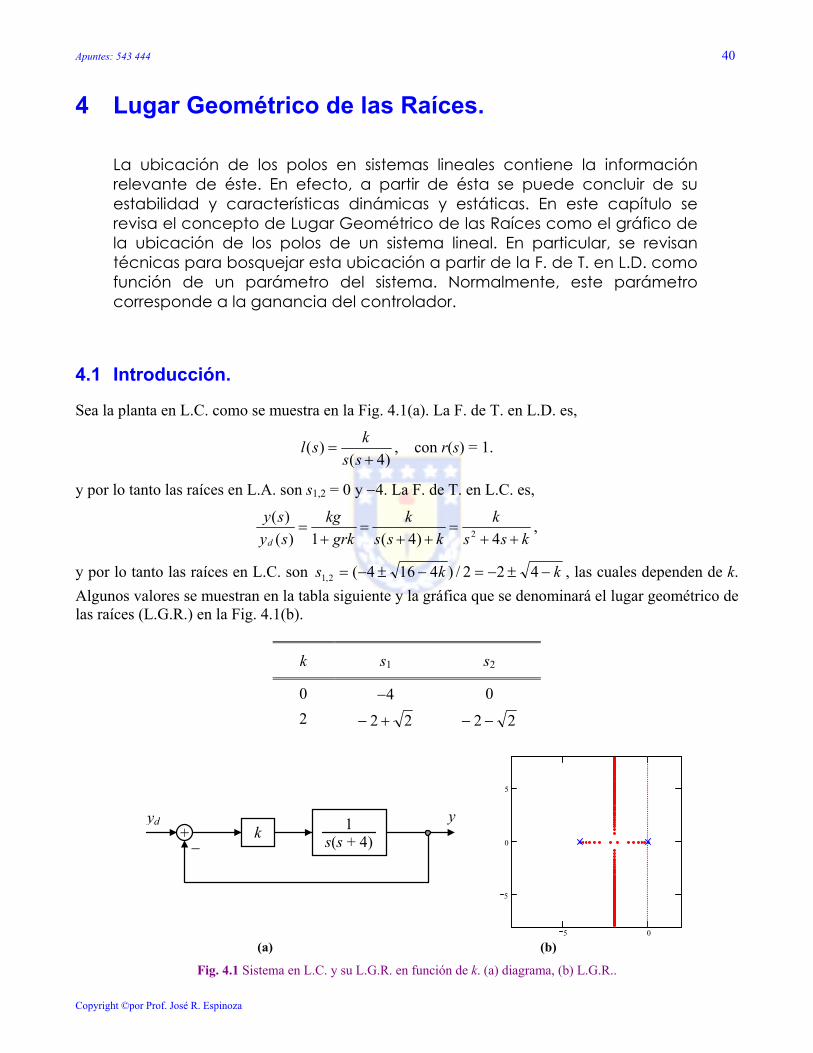
Apuntes: 543 444 40
Copyright ©por Prof. José R. Espinoza
4 Lugar Geométrico de las Raíces.
La ubicación de los polos en sistemas lineales contiene la información relevante de éste. En efecto, a partir de ésta se puede concluir de su estabilidad y características dinámicas y estáticas. En este capítulo se revisa el concepto de Lugar Geométrico de las Raíces como el gráfico de la ubicación de los polos de un sistema lineal. En particular, se revisan técnicas para bosquejar esta ubicación a partir de la F. de T. en L.D. como función de un parámetro del sistema. Normalmente, este parámetro corresponde a la ganancia del controlador.
4.1 Introducción.
Sea la planta en L.C. como se muestra en la Fig. 4.1(a). La F. de T. en L.D. es,
)4(
)(+
=ssksl , con r(s) = 1.
y por lo tanto las raíces en L.A. son s1,2 = 0 y −4. La F. de T. en L.C. es,
kss
kkss
kgrk
kgsysy
d ++=
++=
+=
4)4(1)()(
2 ,
y por lo tanto las raíces en L.C. son kks −±−=−±−= 422/)4164(2,1 , las cuales dependen de k. Algunos valores se muestran en la tabla siguiente y la gráfica que se denominará el lugar geométrico de las raíces (L.G.R.) en la Fig. 4.1(b).
k s1 s2
0 −4 0 2 22 +− 22 −−
yk
yd+
−1
s(s + 4)
5 0
5
0
5
(a) (b)
Fig. 4.1 Sistema en L.C. y su L.G.R. en función de k. (a) diagrama, (b) L.G.R..
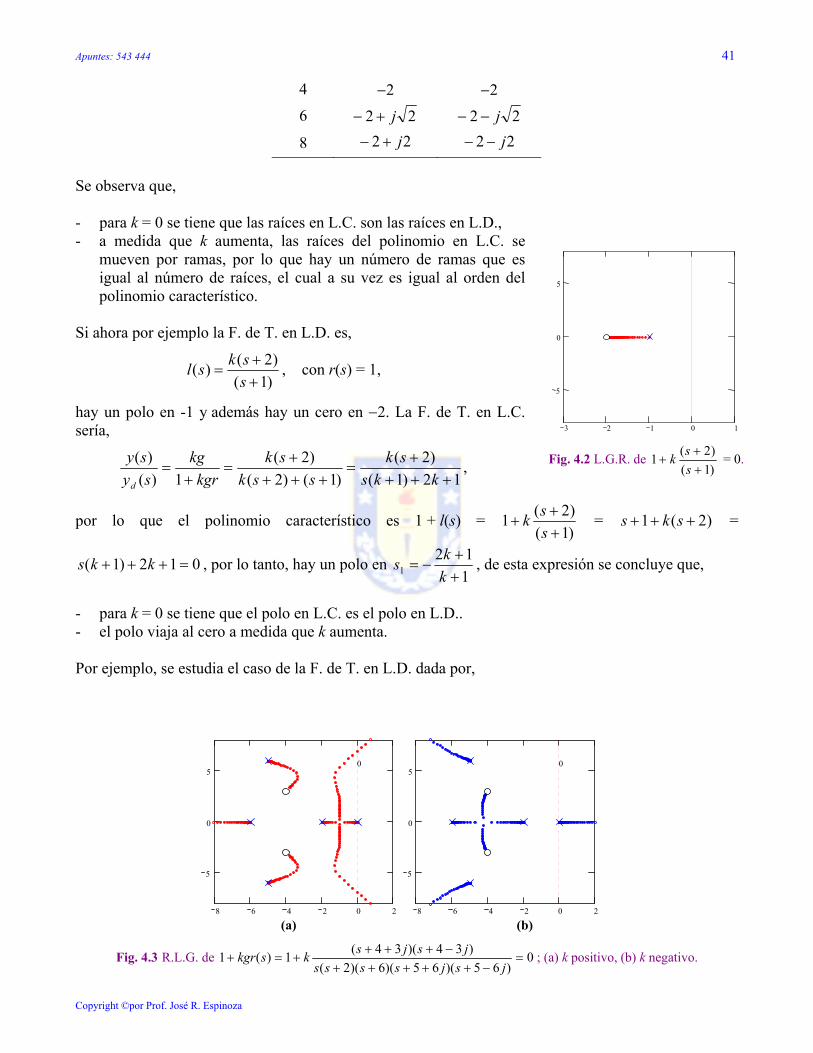
Apuntes: 543 444 41
Copyright ©por Prof. José R. Espinoza
4 −2 −2 6 22 j+− 22 j−−
8 22 j+− 22 j−− Se observa que, - para k = 0 se tiene que las raíces en L.C. son las raíces en L.D., - a medida que k aumenta, las raíces del polinomio en L.C. se
mueven por ramas, por lo que hay un número de ramas que es igual al número de raíces, el cual a su vez es igual al orden del polinomio característico.
Si ahora por ejemplo la F. de T. en L.D. es,
)1()2()(
++
=ssksl , con r(s) = 1,
hay un polo en -1 y además hay un cero en −2. La F. de T. en L.C. sería,
12)1(
)2()1()2(
)2(1)(
)(+++
+=
++++
=+
=kks
skssk
skkgr
kgsy
sy
d
,
por lo que el polinomio característico es 1 + l(s) = )1()2(1
++
+ssk = )2(1 +++ sks =
012)1( =+++ kks , por lo tanto, hay un polo en 112
1 ++
−=kks , de esta expresión se concluye que,
- para k = 0 se tiene que el polo en L.C. es el polo en L.D.. - el polo viaja al cero a medida que k aumenta. Por ejemplo, se estudia el caso de la F. de T. en L.D. dada por,
3 2 1 0 1
5
0
5
Fig. 4.2 L.G.R. de )1()2(1
++
+ssk = 0.
8 6 4 2 0 2
5
0
50
8 6 4 2 0 2
5
0
50
(a) (b)
Fig. 4.3 R.L.G. de 0)65)(65)(6)(2(
)34)(34(1)(1 =−+++++
−++++=+
jsjssssjsjskskgr ; (a) k positivo, (b) k negativo.

Apuntes: 543 444 42
Copyright ©por Prof. José R. Espinoza
)65)(65)(6)(2(
)34)(34()(jsjssss
jsjsksl−+++++
−+++= ,
la cual genera una F. de T. en L.C. dada por,
ksksksss
sskyyd 25)8732()608(15318
2582345
2
+++++++++
= .
Es claro que no es posible determinar la ubicación de los polos de esta función por inspección. El resultado exacto se encuentra en la Fig. 4.3. El método del L.G.R. es una técnica gráfica para determinar los polos de la F. de T. en L.C. h(s) a partir de la F. de T. en L.D. l(s) conforme varía uno de los parámetros del sistema. Este método proporciona un gráfico que permite estudiar, - estabilidad → polos en el S.P.I./S.P.D.. - dinámica → ubicación de polos en el diagrama (complejos: oscilaciones). - estado estacionario → error en estado estacionario en el diagrama (polos en el origen). - sensibilidad → variación del L.G.R. en función de algún parámetro. - diseño → ubicación de los polos. Desafío: bosquejar el L.G.R. de la F. de T. en L.C. a partir de la F. de T. en L.D. en forma rápida. Para esto existe el Método del L.G.R. que propone varias reglas para la construcción de éste.
4.2 El Método del L.G.R.
Es un conjunto de reglas que permiten encontrar la ubicación de los polos en L.C. del sistema general dado por la Fig. 4.4 sin resolver la ecuación característica. Los polos en L.C. están dados por las raíces de la ecuación,
0)(1)(1 =+=+ skgrsl
Todo punto s en el plano complejo que cumpla con la ecuación anterior, es un polo del sistema en L.C.. La expresión anterior puede ser escrita como,
)21()2( 1111)( njnjj ek
ek
ekk
sgr +ππ+ππ ===−= .
Por lo tanto, se debe cumplir que,
k
sgr 1)( = y )12())(arg( +π= nsgr ,
yk
yd+
−g(s)
r(s)
Fig. 4.4 Sistema generalizado en L.C..

Apuntes: 543 444 43
Copyright ©por Prof. José R. Espinoza
las cuales se conocen como la condición de magnitud y ángulo, respectivamente. En general, un punto en el plano complejo debe cumplir con la condición de ángulo para que corresponda a un polo del sistema en L.C.. La ecuación de magnitud puede ser posteriormente utilizada para determinar la ganancia k necesaria para tener el punto en L.C. como polo.
Ejemplo 4.1. Supongamos que )4(
1)(+
=ss
skgr . Determine si –6 y –1 pertenecen al L.G.R. en L.C.. R.: Sea s1 = −1 un
punto del lugar geométrico, entonces, º180)41(1
1arg))(arg( 1 =
+−−=sgr , por lo tanto s1 ∈ al L.G.R.; además,
3/1)41)(1/(1/1)( 1 =+−−== ksgr , por lo que k = 3. Por otro lado, sea s1 = −6 un punto del L.G.R., como
º0)46(6
1arg))(arg( 1 =
+−−=sgr , entonces, s1 ∉ al L.G.R.. Esto corrobora el diagrama de la Fig. 4.1.♣
Las reglas para construir el L.G.R. son las siguientes. Regla Nº1: Numero de ramas. El número total de ramas es igual al número de polos de la F. de T. en L.D. l(s). Dem.: En
L.C. hay igual número de polos que en l(s).
Regla Nº2: Puntos de inicio (k → 0). Las ramas del L.G.R. comienzan en los polos de la F. de T. en L.D. l(s). Dem.:
0)()(1)(1 =
+Π+Π
+=+j
i
pszskskgr ; ∴ 0)()( =+Π++Π ij zskps , con k = 0 se tiene que
0)( =+Π jps . Por lo tanto, los valores de s que satisfacen esta ecuación son los polos del sistema.
Regla Nº3: Puntos finales (k → ∞).
Si l(s) tiene ηp polos y ηz ceros, entonces ηz ramas terminan en los ηz ceros y las ηp − ηz
ramas restantes terminan en el infinito. Dem.: 0)()(1)(1 =
+Π+Π
+=+j
i
pszskskgr ; ∴
0)()( =+Π++Π ij zskps , o también 0)()(1=+Π++Π ij zsps
k con k → ∞
0)( =+Π izs . Por lo tanto, los valores de s que satisfacen esta ecuación son los ceros del sistema.
Regla Nº4: Comportamiento a lo largo del eje real (s = σ). Un punto en el eje real es un punto del L.G.R. si la suma del número de polos y ceros que
se encuentran a la derecha del punto es impar. Dem.: Utilizando el criterio de los ángulos. El aporte neto de ángulo por un número par de ceros y/o polos es cero. Por lo tanto, el número debe ser impar.
Regla Nº5: Determinación de la ganancia.
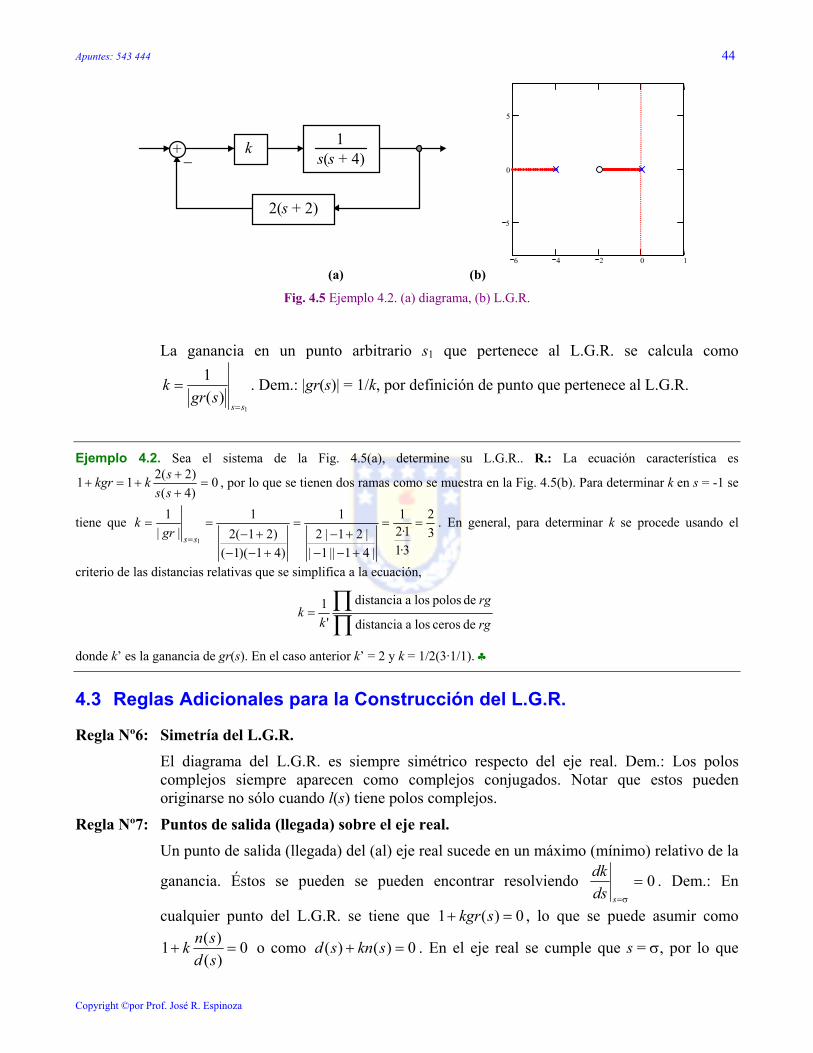
Apuntes: 543 444 44
Copyright ©por Prof. José R. Espinoza
La ganancia en un punto arbitrario s1 que pertenece al L.G.R. se calcula como
1)(
1
sssgr
k=
= . Dem.: |gr(s)| = 1/k, por definición de punto que pertenece al L.G.R.
Ejemplo 4.2. Sea el sistema de la Fig. 4.5(a), determine su L.G.R.. R.: La ecuación característica es
0)4()2(211 =
++
+=+ssskkgr , por lo que se tienen dos ramas como se muestra en la Fig. 4.5(b). Para determinar k en s = -1 se
tiene que 32
3·11·2
1
|41||1||21|2
1
)41)(1()21(2
1||
1
1
==
+−−+−
=
+−−+−
===ssgr
k . En general, para determinar k se procede usando el
criterio de las distancias relativas que se simplifica a la ecuación,
∏∏=
rg
rg
kk
deceroslosadistancia
depoloslosadistancia
'1
donde k’ es la ganancia de gr(s). En el caso anterior k’ = 2 y k = 1/2(3·1/1). ♣
4.3 Reglas Adicionales para la Construcción del L.G.R.
Regla Nº6: Simetría del L.G.R. El diagrama del L.G.R. es siempre simétrico respecto del eje real. Dem.: Los polos
complejos siempre aparecen como complejos conjugados. Notar que estos pueden originarse no sólo cuando l(s) tiene polos complejos.
Regla Nº7: Puntos de salida (llegada) sobre el eje real. Un punto de salida (llegada) del (al) eje real sucede en un máximo (mínimo) relativo de la
ganancia. Éstos se pueden se pueden encontrar resolviendo 0=σ=sds
dk . Dem.: En
cualquier punto del L.G.R. se tiene que 0)(1 =+ skgr , lo que se puede asumir como
0)()(1 =+
sdsnk o como 0)()( =+ sknsd . En el eje real se cumple que s = σ, por lo que
k+−
1s(s + 4)
2(s + 2)
6 4 2 0 1
5
0
5
(a) (b)
Fig. 4.5 Ejemplo 4.2. (a) diagrama, (b) L.G.R.

Apuntes: 543 444 45
Copyright ©por Prof. José R. Espinoza
0)()( =σ+σ knd . Para un pequeño incremento de k se tiene 0)()()( =σ∆++σ nkkd ,
0)()()( =σ∆+σ+σ knknd , o también, 0)()(
)(1 =σ+σ
σ∆+
kndnk . Si se asume k de manera
de estar en el punto de partida (llegada) entonces hay polos múltiples y por lo tanto 0)()( =σ+σ knd se puede escribir como (σ - σo)nψ’(σ), con n la multiplicidad del polo y
σo el punto exacto en el eje real del punto de partida (llegada). Por lo tanto, se puede
escribir, 0)(')(
)(1o
=σψσ−σ
σ∆+ n
nk , 0)(1 =σ∆σψ
∆+ nk , 0)(1 1 =σ∆
σψσ∆
∆+ −n
k , )(
1
σψσ∆
−=σ∆
∆ −nk ,
por lo que si ∆σ → 0 , entonces ∆k/∆σ → 0.
Ejemplo 4.3. Determine el punto de partida/llegada de )4(
1)(+
=ss
sgr . R.: ))4(()(
1+−=
−= ssdsd
sgrdsd
dsdk . Al
tomar 042)4( 2 =−σ−=σ−σ−σ
==σ σ= d
ddsdk
ddk
s, entonces, σ = −2. Esto corrobora el diagrama de la Fig. 4.1.♣
Regla Nº8: Ángulo de salida (llegada) del (al) eje real. Las líneas que entran (salen) del (al) L.G.R. están separadas por un ángulo dado por
180º/α en el punto de entrada (salida), donde α es el número de ramas que se cruzan. Dem.: El número de ramas que se cruzan es siempre múltiplo de dos y además se tiene,
0)()(
)(1 =+
∆+sknsd
snk . Cerca del polo múltiple en L.C. que es so se puede escribir,
)( 1
)()(
1)(
)(
1)(
)(
o
o
o
o
nn
n
n
n
jskj
jskjj
jsk
sssk
ω∆+σ∆+ψ∆−=ω∆+σ∆
ω∆+σ∆+ψ∆−=ω∆+σ∆
−=ω∆+σ∆
ω∆+σ∆+ψ∆
−=−ψ
∆
,
de donde, nn jskj )(arg1arg)arg( o ω∆+σ∆+ψ∆+−=ω∆+σ∆ . El tomar 0→ω∆+σ∆ j
implica que ∆k → 0, así )arg(lím00
ω∆+σ∆→ω∆→σ∆
j = n 1arg − + n jsk )(arglím o
00
ω∆+σ∆+ψ∆→ω∆→σ∆
= n 1arg − , puesto que el argumento de la raíz es siempre positivo. Así, para n = 2, º90,º90)arg(),arg()arg(lím
00
−=−=ω∆+σ∆→ω∆→σ∆
jjj y para n = 4,
=−=−−=+−
=+
=ω∆+σ∆→ω∆→σ∆
º315)2/22/2arg(º225)2/22/2arg(º135)2/22/2arg(
º45)2/22/2arg(
)arg(lím00
jjj
j
j .
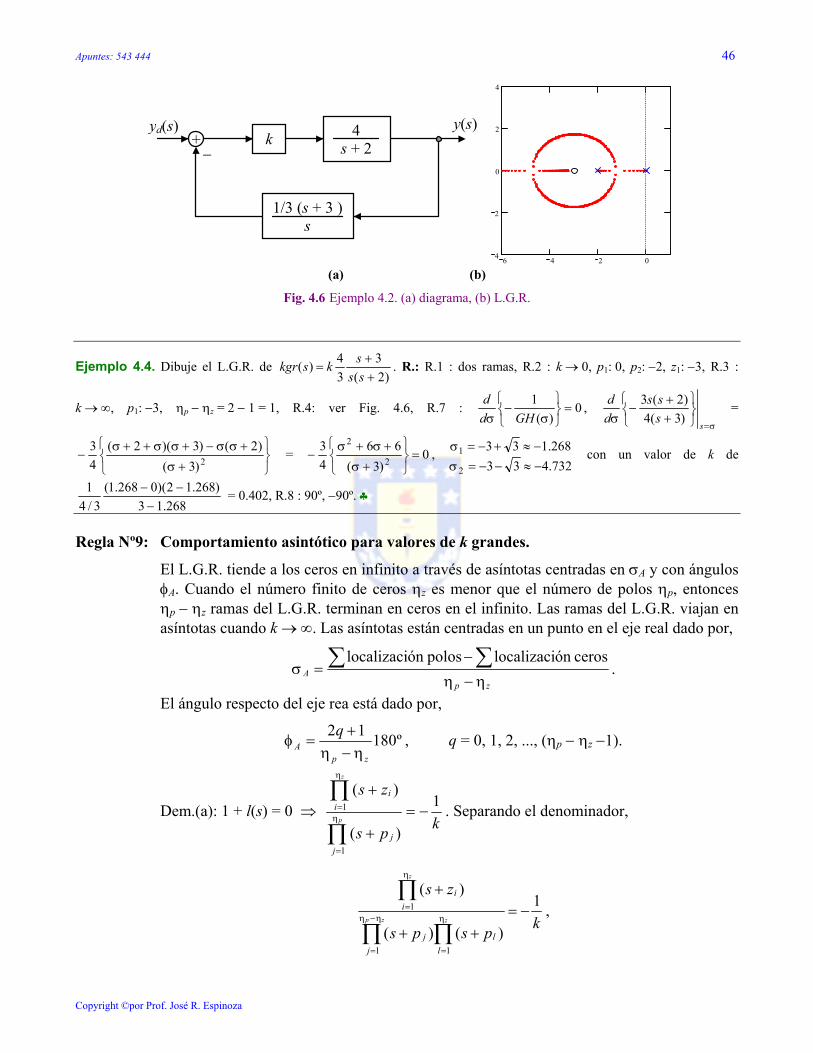
Apuntes: 543 444 46
Copyright ©por Prof. José R. Espinoza
Ejemplo 4.4. Dibuje el L.G.R. de )2(
334)(
++
=ssskskgr . R.: R.1 : dos ramas, R.2 : k → 0, p1: 0, p2: −2, z1: −3, R.3 :
k → ∞, p1: −3, ηp − ηz = 2 − 1 = 1, R.4: ver Fig. 4.6, R.7 : 0)(
1=
σ−
σ GHdd ,
σ=
++
−σ
ssss
dd
)3(4)2(3 =
+σ
+σσ−+σσ++σ− 2)3(
)2()3)(2(43 = 0
)3(66
43
2
2=
+σ
+σ+σ− ,
732.433268.133
2
1
−≈−−=σ−≈+−=σ con un valor de k de
268.13)268.12)(0268.1(
3/41
−−− = 0.402, R.8 : 90º, −90º. ♣
Regla Nº9: Comportamiento asintótico para valores de k grandes.
El L.G.R. tiende a los ceros en infinito a través de asíntotas centradas en σA y con ángulos φA. Cuando el número finito de ceros ηz es menor que el número de polos ηp, entonces ηp − ηz ramas del L.G.R. terminan en ceros en el infinito. Las ramas del L.G.R. viajan en asíntotas cuando k → ∞. Las asíntotas están centradas en un punto en el eje real dado por,
zp
Aη−η
−=σ ∑∑ ceros ónlocalizacipolos ónlocalizaci
.
El ángulo respecto del eje rea está dado por,
º18012
zpA
qη−η
+=φ , q = 0, 1, 2, ..., (ηp − ηz −1).
Dem.(a): 1 + l(s) = 0 ⇒ kps
zs
p
z
jj
ii 1
)(
)(
1
1 −=+
+
∏
∏η
=
η
= . Separando el denominador,
kpsps
zs
zzp
z
ll
jj
ii 1
)()(
)(
11
1 −=++
+
∏∏
∏η
=
η−η
=
η
= ,
y(s)k
yd(s)+
−4
s + 2
1/3 (s + 3 )s
6 4 2 04
2
0
2
4
(a) (b)
Fig. 4.6 Ejemplo 4.2. (a) diagrama, (b) L.G.R.
Apuntes: 543 444 47
Copyright ©por Prof. José R. Espinoza
para s → ∞ (k → ∞) se tiene que,
º18012º360º180arg
1arg1argarg)arg(º360º180
zpzp
qj qqe
kks
zp
zpzpzpzp
η−η+
=η−η
+=
=
−=−=−=
η−η+
η−ηη−ηη−ηη−η
, q = 0, 1, ..., ηp − ηz − 1.
Dem.(b): 1 + l(s) = 0 ⇒ 0)()(11
=+++ ∏∏η
=
η
=
zp
ii
jj zskps , lo que puede ser escrito como
0)( 01
101
1 =+++++++ −η−η
η−η−η
η bsbskasas zz
zpp
p LL y reducido a,
0)( 111 =++−+ −η−η
−η−ηη−η ksbas zp
zpzp L ♠
Se asume que gr(s) es de la forma zp
As η−ησ− )(1 y se aproxima
ksss AAzpAzpzpzp ++σ−σ−η−η+=σ− −η−ηη−ηη−η L)1())(()( 1 usando Taylor alrededor
de σA = 0. Entonces,
ksskgr Azpzpzp ++ση−η−+==+ −η−ηη−η L1))(1(01 ♣
Igualando ♠ y ♣ se tiene que Azpzp ba ση−η−=− −η−η )(11 , y dado que ∑η
=−η =
p
p
jjpa
11 y
∑η
=−η =
z
z
iizb
11 , entonces,
zpzp
ii
jj
A
zp
zp
η−η
−=
η−η
−−=σ ∑∑∑∑
η
=
η
= ceros ónlocalizacipolos ónlocalizaci11 .
Regla Nº10: Cruces en el eje imaginario. Las ramas del L.G.R. cruzan el eje imaginario cuando la ganancia (k = kc) y la frecuencia
(ω = ωc) cumplen con,
0))((m))((m
0))((e))((e=ωℑ+ωℑ
=ωℜ+ωℜ
ccc
ccc
jnkjdjnkjd
.
Dem.: 1 + l(s) = 0. En el cruce k = kc; s = σc + jωc = jωc. Además, l(s) = kn(s)/d(s), entonces,
)()(0)()(1 ccc
c
cc jnkjd
jdjnk ω+ω==ωω
+ .
Esta ecuación es una ecuación compleja, por lo tanto, su parte real e imaginaria deben ser idénticamente iguales a cero. Nota: alternativamente, kc se puede encontrar utilizando el criterio de estabilidad de Routh-Hurwitz.

Apuntes: 543 444 48
Copyright ©por Prof. José R. Espinoza
Ejemplo 4.5. Dibuje el L.G.R. de )2)(1(
6)(++
=sss
kskgr . R.: R.7 : 06
)2)(1(=
σ+σ+σ−
σ=
σ dd
ddk ,
023 23 =σ+σ+σσd
d , 0263 2 =+σ+σ , 422.02/311 −=+−=σ , 577.12/312 −=−−=σ , R.8 : 90º, −90º, R.9:
13/)0()210( −=−−−=σ A ,
===
=φ2º3001º1800º60
qqq
A , R.10 : cccccc kkjjj 6306e)2)(1(e 2 +ω==ℜ++ω+ωωℜ ,
cccccc kjjj ω+ω−==ℑ++ω+ωωℑ 206m)2)(1(m 3 , de donde, 2±=ωc , y 1=ck . ♣
Regla Nº11: Suma de los polos en lazo cerrado.
Si en la función de transferencia de lazo directo se cumple que ηp − ηz ≥ 2, entonces la suma de los polos de la F. de T. de L.C. permanece constante (independiente de k) y es igual a la suma de los polos de la F. de T. de L.D. Dem.: El polinomio característico de l(s) es:
01
11
)( asasasps rr
jj
pp
pp
pp
+++++=+ −η−η
−η−η
ηη
=∏ LL , en donde, ∑
η
=−η =
p
p
jjpa
11 .
El polinomio característico de la F. de T. en L.C. es,
∏∏∏η
=
η
=
η
=
+=+++pzp
kk
ii
jj Pszskps
111
)()()( ,
por lo tanto,
0
11
01
101
1 )(
dsds
bsbskasasasp
pp
zz
zpp
pp
p rr
+++=
+++++++++−η
−ηη
−η−η
η−η−η
−η−η
η
L
LLL,
en donde ∑η
=−η =
p
p
kkPd
11 . Si ηz = ηp − r y ηp − r < ηp − 1 ⇒ ηz < ηp − 1 ⇒ ηz ≤ ηp − 2
se tiene,
01
1001
1 )( dsdskbaskasas pp
ppp
pp
p rr +++=+++++++ −η
−ηη−η
−η−η
−ηη LLL ,
4 2 05
0
5
Fig. 4.7 L.G.R. del Ejemplo 4.5.

Apuntes: 543 444 49
Copyright ©por Prof. José R. Espinoza
entonces, 11 −η−η = pp da ⇒ ∑∑η
=
η
=
=pp
jj
kk pP
11
.
Regla Nº12: Ángulos de salida (llegada) de (a) un par de polos (ceros) conjugados. El ángulo de partida de un polo complejo está dado por,
pθ=−− ∑∑ º180polos rest. los desde ángulosceros los desde ángulos ,
ecuación que corresponde al criterio de ángulo, y el ángulo de llegada por,
cθ=+− ∑∑ º180ceros rest. los desde ángulospolos los desde ángulos ,
Dem.: 1 + l(s) = 0.
+
+==
∏
∏η
=
η
=p
z
jj
ii
ps
zssgr
1
1
)(
)(argº180)(arg .
Sea pc el polo complejo en donde se desea saber el θp.
++−
+= ∏∏−η
=
η
=
1
11
)()(arg)(argº180pz
jjc
ii pspszs .
En el entorno de pc, ω∆+σ∆+−= jps c , se cumple,
+ω∆+σ∆+−−
ω∆+σ∆−
+ω∆+σ∆+−=
∏
∏−η
=
η
=
1
1
1
)(arg
)arg()(argº180
p
z
jjc
iic
pjp
jzjp
,
4 2 0 2 44
2
0
2
4
Fig. 4.8 L.G.R. del Ejemplo 4.6.
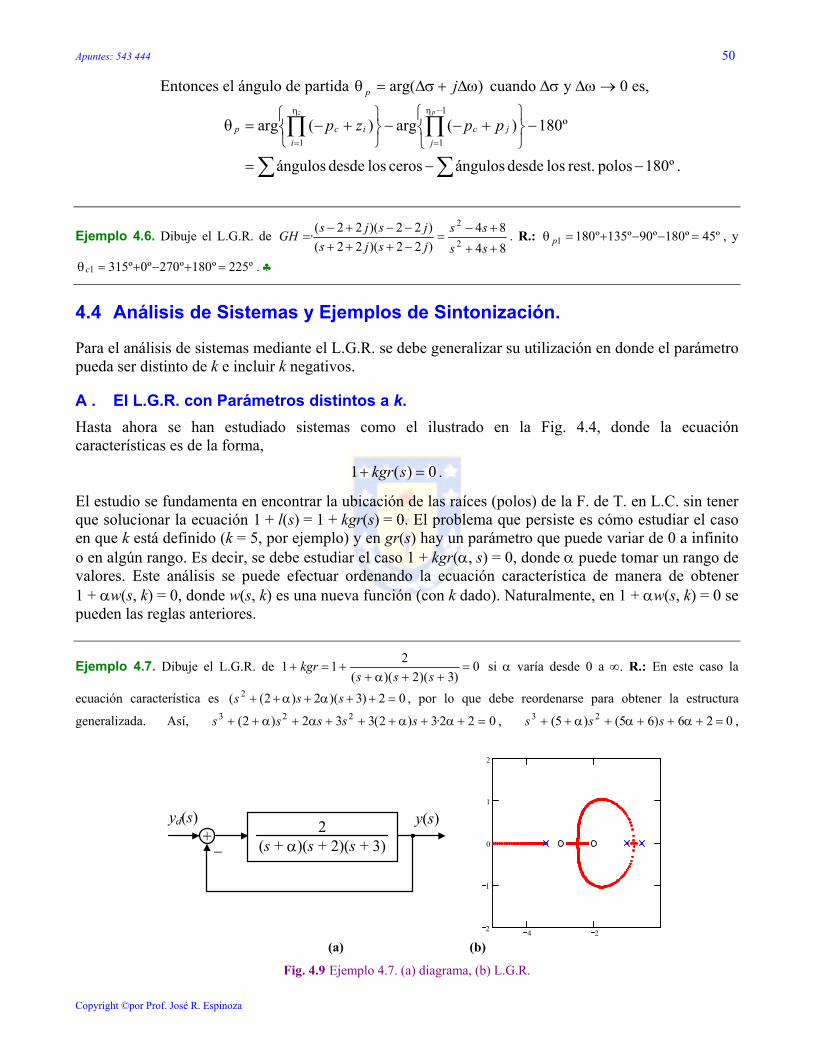
Apuntes: 543 444 50
Copyright ©por Prof. José R. Espinoza
Entonces el ángulo de partida )arg( ω∆+σ∆=θ jp cuando ∆σ y ∆ω → 0 es,
. º180polos rest. los desde ángulosceros los desde ángulos
º180)(arg)(arg1
11
−−=
−
+−−
+−=θ
∑∑
∏∏−η
=
η
=
pz
jjc
iicp ppzp
Ejemplo 4.6. Dibuje el L.G.R. de 8484
)22)(22()22)(22(
·2
2
++
+−=
−+++−−+−
=ssss
jsjsjsjs
GH . R.: º45º180º90º135º1801 =−−+=θ p , y
º225º180º270º0º3151 =+−+=θc . ♣
4.4 Análisis de Sistemas y Ejemplos de Sintonización.
Para el análisis de sistemas mediante el L.G.R. se debe generalizar su utilización en donde el parámetro pueda ser distinto de k e incluir k negativos.
A . El L.G.R. con Parámetros distintos a k. Hasta ahora se han estudiado sistemas como el ilustrado en la Fig. 4.4, donde la ecuación características es de la forma,
0)(1 =+ skgr .
El estudio se fundamenta en encontrar la ubicación de las raíces (polos) de la F. de T. en L.C. sin tener que solucionar la ecuación 1 + l(s) = 1 + kgr(s) = 0. El problema que persiste es cómo estudiar el caso en que k está definido (k = 5, por ejemplo) y en gr(s) hay un parámetro que puede variar de 0 a infinito o en algún rango. Es decir, se debe estudiar el caso 1 + kgr(α, s) = 0, donde α puede tomar un rango de valores. Este análisis se puede efectuar ordenando la ecuación característica de manera de obtener 1 + αw(s, k) = 0, donde w(s, k) es una nueva función (con k dado). Naturalmente, en 1 + αw(s, k) = 0 se pueden las reglas anteriores.
Ejemplo 4.7. Dibuje el L.G.R. de 0)3)(2)((
211 =++α+
+=+sss
kgr si α varía desde 0 a ∞. R.: En este caso la
ecuación característica es 02)3)(2)2(( 2 =++α+α++ sss , por lo que debe reordenarse para obtener la estructura
generalizada. Así, 022·3)2(332)2( 223 =+α+α+++α+α++ sssss , 026)65()5( 23 =+α++α+α++ sss ,
+−
yd(s) y(s)2(s + α)(s + 2)(s + 3)
4 22
1
0
1
2
(a) (b)
Fig. 4.9 Ejemplo 4.7. (a) diagrama, (b) L.G.R.

Apuntes: 543 444 51
Copyright ©por Prof. José R. Espinoza
0265)65( 232 =++++++α sssss , 0265
65123
2=
+++
++α+
sssss , por lo que,
26565)( 23
2
+++++
ssssssw ,
0)1)(22)(22(
)3)(2(1 =
+−+++
++α+
sssss
. En esta última ecuación se pueden aplicar las reglas anteriores. R.7 : 0=σα
=σ d
dddk ,
0)3)(2(
)1)(22(s)22(s=
+++−+++
=σ ss
sddk , 22
2322
)65()265)(52()65)(6103(0
++
++++−++++=
ssssssssss ,
22
234
)65(265637100
++++++
=ss
ssss ⇒ 284.1352.3484.2284.1352.3812.0
42
31
jssjss
−−=−=+−=−=
. EL L.G.R. indica que el sistema es siempre
estable, para pequeños valores de α, la respuesta es principalmente de segundo orden y un máximo sobrepaso del 5% se podría esperar. ♣
Otro ejemplo interesante es cuando un parámetro puede variar en torno a un valor promedio o nominal. Este análisis es interesante para conocer la sensibilidad del sistema respecto de este parámetro.
Ejemplo 4.8. Sea ))(2(
)3(7.20)(β++
+=
sssssgr , donde β∆+β=β 0 con 80 =β . Estudie el sistema para variaciones de ∆β. R.:
La ecuación característica es, 0)8)(2(
)3(7.201 =β∆+++
++
ssss , 0)3(7.20)2()8)(2( =++β∆++++ ssssss ,
01.627.3610
)2(1 23 =+++
+β∆+
sssss , 0
)488.2363.2)(274.5()2(1 =
±+++
β∆+jss
ss , R.7 : σβ∆
dd =
+σσ+σ+σ+σ
σ )2(1.627.3610 23
dd = 0, 0
)2(2.1242.1247.164
22
234=
+σσ
−σ−σ−σ+σ=
σβ∆
dd , 256.11 −=σ , 072.52 =σ ,
056.2908.33 j+−=σ , 056.2908.34 j−−=σ , R.12 : º18021210 −θ−θ−θ+θ=θ ppzzp ,
+=θ −
488.2363.2tgº90 1
0p +
º180º90363.2274.5
488.2tg488.2
0.2363.2tgº90 11 −−
−−
−
+ −− = -78.7°. Este análisis es para ∆β > 0, el L.G.R. se muestra en
la Fig. 4.10. ♣
Las preguntas que se derivan del ejemplo anterior son ¿ qué sucede si ∆β < 0 ?, ¿ qué sucede en general si k ∈ (−∞, 0] en la ecuación característica dada por la forma general 1 + kgr(s) = 0 ?.
5 0 5
5
0
5
0
0
. Fig. 4.10 L.G.R. del Ejemplo 4.8.
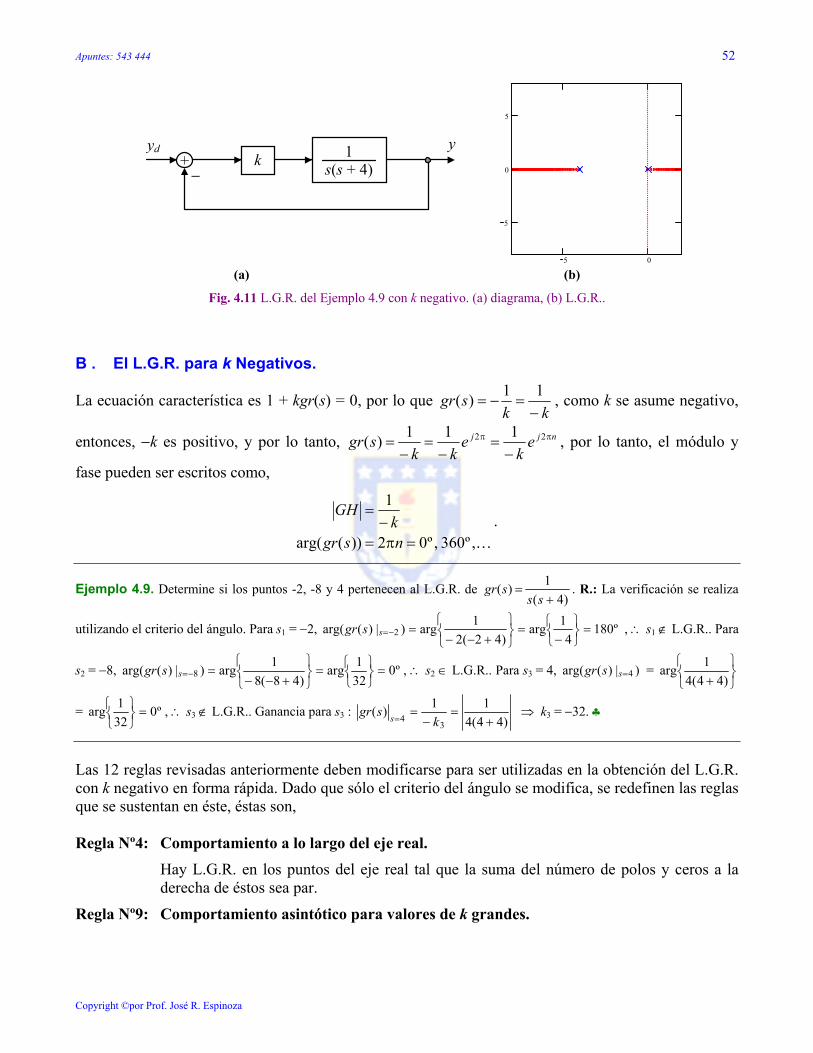
Apuntes: 543 444 52
Copyright ©por Prof. José R. Espinoza
B . El L.G.R. para k Negativos.
La ecuación característica es 1 + kgr(s) = 0, por lo que kk
sgr−
=−=11)( , como k se asume negativo,
entonces, −k es positivo, y por lo tanto, njj ek
ekk
sgr ππ
−=
−=
−= 22 111)( , por lo tanto, el módulo y
fase pueden ser escritos como,
K,º360,º02))(arg(
1
=π=−
=
nsgrk
GH.
Ejemplo 4.9. Determine si los puntos -2, -8 y 4 pertenecen al L.G.R. de )4(
1)(+
=ss
sgr . R.: La verificación se realiza
utilizando el criterio del ángulo. Para s1 = −2, º1804
1arg)42(2
1arg)|)(arg( 2 =
−=
+−−=−=ssgr , ∴ s1 ∉ L.G.R.. Para
s2 = −8, º0321arg
)48(81arg)|)(arg( 8 =
=
+−−=−=ssgr , ∴ s2 ∈ L.G.R.. Para s3 = 4, )|)(arg( 4=ssgr =
+ )44(41arg
= º0321arg =
, ∴ s3 ∉ L.G.R.. Ganancia para s3 : )44(4
11)(3
4 +=
−=
= ksgr s ⇒ k3 = −32. ♣
Las 12 reglas revisadas anteriormente deben modificarse para ser utilizadas en la obtención del L.G.R. con k negativo en forma rápida. Dado que sólo el criterio del ángulo se modifica, se redefinen las reglas que se sustentan en éste, éstas son, Regla Nº4: Comportamiento a lo largo del eje real. Hay L.G.R. en los puntos del eje real tal que la suma del número de polos y ceros a la
derecha de éstos sea par.
Regla Nº9: Comportamiento asintótico para valores de k grandes.
yk
yd+
−1
s(s + 4)
5 0
5
0
5
(a) (b)
Fig. 4.11 L.G.R. del Ejemplo 4.9 con k negativo. (a) diagrama, (b) L.G.R..
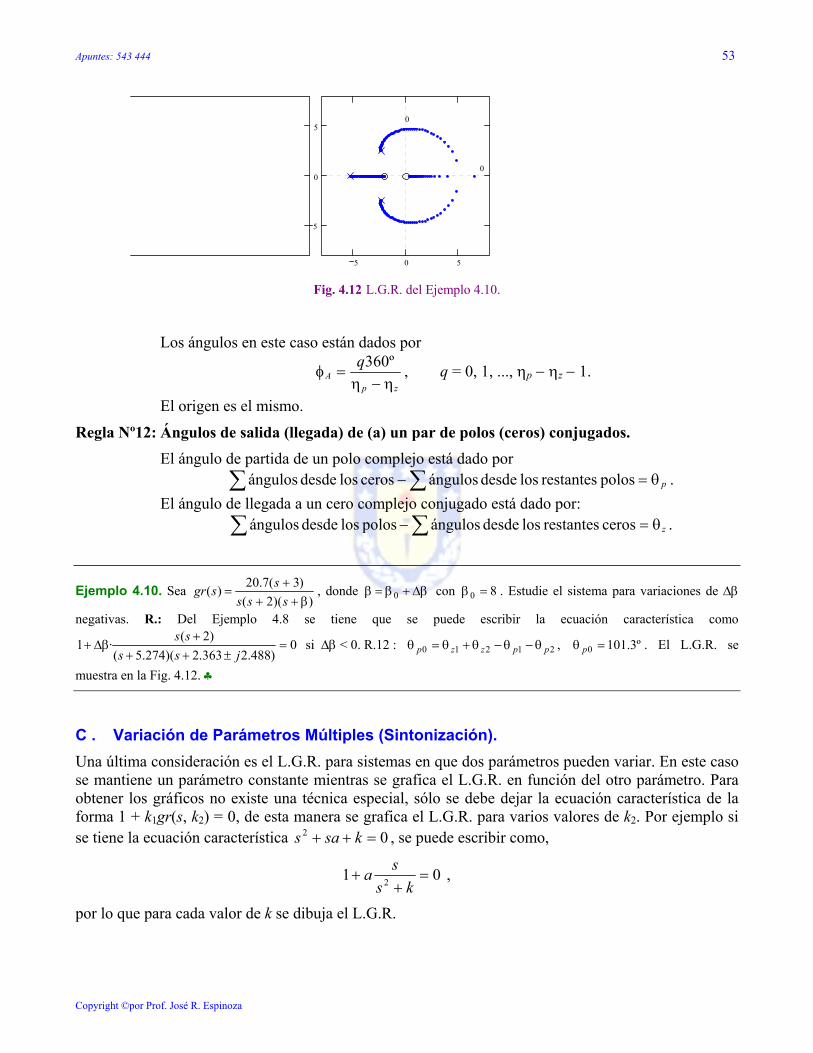
Apuntes: 543 444 53
Copyright ©por Prof. José R. Espinoza
Los ángulos en este caso están dados por
zp
Aq
η−η=φ
º360 , q = 0, 1, ..., ηp − ηz − 1.
El origen es el mismo.
Regla Nº12: Ángulos de salida (llegada) de (a) un par de polos (ceros) conjugados. El ángulo de partida de un polo complejo está dado por
pθ=− ∑∑ polos restantes los desde ángulosceros los desde ángulos . El ángulo de llegada a un cero complejo conjugado está dado por: zθ=− ∑∑ ceros restantes los desde ángulospolos los desde ángulos .
Ejemplo 4.10. Sea ))(2(
)3(7.20)(β++
+=
sssssgr , donde β∆+β=β 0 con 80 =β . Estudie el sistema para variaciones de ∆β
negativas. R.: Del Ejemplo 4.8 se tiene que se puede escribir la ecuación característica como
0)488.2363.2)(274.5(
)2(·1 =±++
+β∆+
jssss si ∆β < 0. R.12 : 21210 ppzzp θ−θ−θ+θ=θ , º3.1010 =θ p . El L.G.R. se
muestra en la Fig. 4.12. ♣
C . Variación de Parámetros Múltiples (Sintonización). Una última consideración es el L.G.R. para sistemas en que dos parámetros pueden variar. En este caso se mantiene un parámetro constante mientras se grafica el L.G.R. en función del otro parámetro. Para obtener los gráficos no existe una técnica especial, sólo se debe dejar la ecuación característica de la forma 1 + k1gr(s, k2) = 0, de esta manera se grafica el L.G.R. para varios valores de k2. Por ejemplo si se tiene la ecuación característica 02 =++ ksas , se puede escribir como,
01 2 =+
+ks
sa ,
por lo que para cada valor de k se dibuja el L.G.R.
5 0 5
5
0
5
0
0
Fig. 4.12 L.G.R. del Ejemplo 4.10.
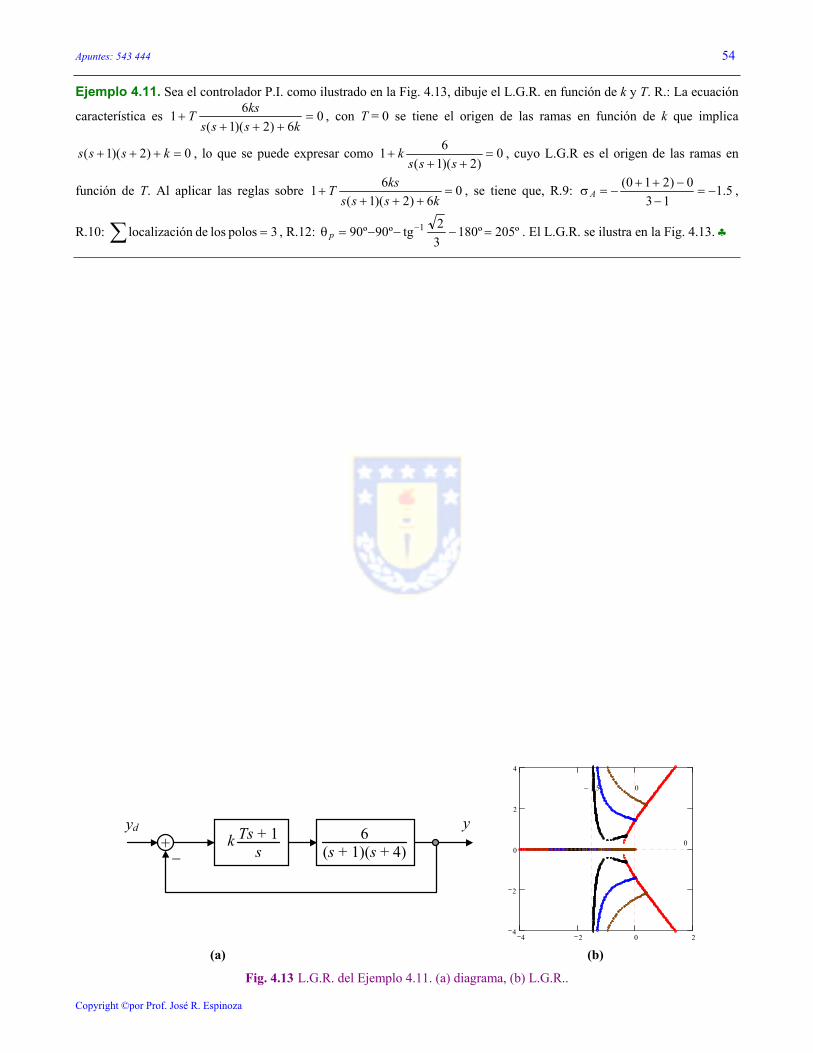
Apuntes: 543 444 54
Copyright ©por Prof. José R. Espinoza
Ejemplo 4.11. Sea el controlador P.I. como ilustrado en la Fig. 4.13, dibuje el L.G.R. en función de k y T. R.: La ecuación
característica es 06)2)(1(
61 =+++
+ksss
ksT , con T = 0 se tiene el origen de las ramas en función de k que implica
0)2)(1( =+++ ksss , lo que se puede expresar como 0)2)(1(
61 =++
+sss
k , cuyo L.G.R es el origen de las ramas en
función de T. Al aplicar las reglas sobre 06)2)(1(
61 =+++
+ksss
ksT , se tiene que, R.9: 5.113
0)210(−=
−−++
−=σA ,
R.10: 3polos los de ónlocalizaci =∑ , R.12: º205º18032tgº90º90 1 =−−−=θ −
p . El L.G.R. se ilustra en la Fig. 4.13. ♣
yyd
+−
6(s + 1)(s + 4)
Ts + 1s
k
4 2 0 24
2
0
2
4
0
1.5− 0
(a) (b)
Fig. 4.13 L.G.R. del Ejemplo 4.11. (a) diagrama, (b) L.G.R..
Apuntes: 543 444 55
Copyright ©por Prof. José R. Espinoza
5 Criterio de Nyquist.
Estabilidad es lo mínimo que se puede exigir al diseño de un sistema realimeantado. Este concepto tiene acepciones simples en sistemas lineales lo que permite su utilización tanto para el análisis y diseño de este tipo de sistemas. En este capítulo se introducen los conceptos de estabilidad absoluta y estabilidad relativa para el diseño de controladores. Especial importancia se da a las definiciones de margen de fase y margen de ganancia por su aplicabilidad a sistemas de cualesquier orden.
5.1 Introducción.
La estabilidad puede analizarse al considerar los tipos y grados de ésta. Tipos:
Estable (entrada acotada/salida acotada y entrada cero estabilidad asintótica) Marginalmente estable. Inestable.
Grados: Estabilidad absoluta. Estabilidad relativa.
Para el análisis de la estabilidad se tienen las siguientes herramientas,
Criterio de Routh-Hurwitz Criterio de Nyquist Diagrama de Bode Diagrama de Nichols
Def.: Se dice que un sistema es estable entrada-acotada/salida-acotada, si para condiciones iniciales nulas (respuesta a estado cero), su salida es acotada para una entrada acotada; es decir, ∀ u(t) tal que |u(t)| ≤ M ⇒ |y(t)| ≤ N < ∞ ∀t
Def.: Si la respuesta a entrada nula, sujeta a condiciones iniciales finitas, alcanza el cero cuando t tiende a infinito, se dice que el sistema es estable a entrada cero (o asintóticamente estable); es decir, |y(t)| ≤ M < ∞ ∀ t ≥ to y 0)(lím =
∞→ty
t.
Afortunadamente, en sistemas lineales e invariantes en el tiempo, ambas definiciones necesitan del mismo requisito, éste es que todas las raíces del polinomio característico de la F. de T. del sistema tengan parte real negativa. Por esta razón los sistemas que cumplen con esta condición son conocidos simplemente como estables.
Apuntes: 543 444 56
Copyright ©por Prof. José R. Espinoza
Def.: Un sistema es marginalmente estable si no hay raíces del polinomio característico en el S.P.D. y a lo más hay raíces simples sobre el eje imaginario.
Ejemplo 5.1. Analizar el caso de un motor de c.c. desde el punto de vista de la estabilidad. R.: El motor al girar a una velocidad angular constante presenta una posición que aumenta linealmente e indefinidamente. Por lo tanto si la posición es una variable de estado, se tiene un sistema marginalmente estable.♣
Def.: Un sistema es inestable si por lo menos hay una raíz simple de la ecuación característica del sistema en el S.P.D., o una raíz doble sobre el eje imaginario.
Ejemplo 5.2. La ubicación de polos de tres sistemas está dada en Fig. 5.1, analice su estabilidad. R.: El caso (a) es marginalmente estable pues hay una raíz simple en el eje imaginario, el caso (b) es inestable pues hay una raíz doble en ele eje imaginario y el caso (c) es inestable pues hay una raíz en el S.P.D. ♣
5.2 Criterio de Routh-Hurwitz.
El Criterio de Routh-Hurwitz es un método algebraico que analiza el polinomio característico de la F. de T. de un sistema y permite estudiar la estabilidad absoluta. Sea el caso ilustrado en la Fig. 5.2, donde se tiene que,
)()(
)()(1)(
)()(
sdsn
srskgskg
sysy
d=
+= ,
donde d(s) es el polinomio característico dado por 011
1)( asasassd nn
n ++++= −− L . La interrogante
σ
jω
a)
σ
jω
b)
σ
jω
c)
Fig. 5.1 L.G.R. de sistemas críticamente estables e inestables.
y(s)k
yd(s)+
−g(s)
r(s)
Fig. 5.2 Sistema generalizado en L.C.

Apuntes: 543 444 57
Copyright ©por Prof. José R. Espinoza
es ¿ puede determinarse si habrá una raíz en el S.P.D. si sólo se observan los coeficientes 011 ,,, aaan L− ?
A . Inspección Inicial. Sea el caso de d(s),
3213231212
3213
321 )()())()(( pppsppppppspppspspsps +++++++=+++ ,
de donde se puede observar que el caso general es,
d(s) = sn + (suma de todos los polos) sn−1 + (suma de los productos de a dos) sn−2
+ (suma de los productos de a tres) sn−3 + · · · + + (producto de todos los polos). Por lo que an-1 = suma de todos los polos, an-2 = suma de los productos de a dos, ..., a0 = producto de todos los polos. Por otro lado, se sabe que si p1 ∧ p2 ∧ · · · ∧ pn, son estables, entonces, p1 ∧ p2 ∧ · · · ∧ pn > 0 lo que implica que todos los coeficientes de d(s); es decir, 011 ,,, aaan L− son positivos y distintos de cero. Es decir, si p1 ∧ p2 ∧ · · · ∧ pn > 0 ⇒ si an-1 ∧ an-2 ∧ · · · ∧ a0 > 0 : caso estable. si an-1 ∨ an-2 ∨ · · · ∨ a0 ≤ 0 ⇒ p1 ∨ p2 ∨ · · · ∨ pn ≤ 0 : caso inestable.
Ejemplo 5.3. Analizar la estabilidad del polinomio característico (a) 132 +− ss y (b) 45.35.0 23 +++ sss . R.: El caso (a) tiene a lo menos una raíz positiva: inestable, el caso (b) puede o no puede ser estable. ♣
B . Criterio de Routh-Hurwitz. Este criterio es necesario y suficiente para el análisis de estabilidad. A partir del polinomio característico 01
11)( asasassd n
nn ++++= −
− L se genera:
10
1,11
3332313
2322212
5133121111
40320201
00
1
n
n
n
nnnn
nnn
n
ss
ss
aaasaas
δδ
δδδδδδ
=δ=δ=δ=δ=δ=δ
−
−
−
−−−−
−−
L
MMMMM
L
L
L
L
en donde, 1,1
1,11,21,21,1
−
+−−+−−
δ
δδ−δδ=δ
i
jiijiiij ; i = 2, ..., n ; j = 1, 2, ... . El criterio establece que el número
de raíces de d(s) con parte real positiva es igual al número de cambios de signo en la primera columna del arreglo (columna pivote). El análisis se complica cuando hay ceros en la columna pivote.

Apuntes: 543 444 58
Copyright ©por Prof. José R. Espinoza
Caso Nº1: No hay ceros en la columna pivote.
i) 012)( asassd ++= ,
00
1
10
11
02
bsas
as, 0
1
0
11 0
11 aa
aa
b =−= ⇒ 00
0
1
>>
aa
.
ii) 012
23)( asasassD +++= ,
00
1
10
11
022
13
csbs
aasas
,
00101
1
1202
1
)0(1
)(1
aabab
c
aaaa
b
=−⋅−=
−−=
⇒ 0
0
0
012
2
>>>
aaaa
a.
Caso Nº2: Ceros en la columna pivote con elementos distinto de cero en la fila en donde está el
cero.
Se hace igual a ε y luego se lleva al límite. Por ejemplo, 1011422)( 2345 +++++= ssssssd
0010000100610421121
01
11
2
3
4
5
sdscs
sss
ε
6106
12124
1
11
1
→ε−
=
ε−=
ε−ε
=
ccd
c, dos cambios de signo ⇒ inestable ⇒ dos raíces inestables.
Caso Nº3: Ceros en la columna pivote con elementos iguales a cero en la fila en donde está el
cero.
Este caso ocurre cuando hay simetrías en torno al origen: (s + σ)(s − σ) ó (s + jω)(s − jω) se puede utilizar un polinomio auxiliar. Por ejemplo, kssssd +++= 42)( 23
00
241
02
81
2
3
kss
kss
k−
es estable si 0 < k < 8 ⇒ kc = 8. Nota: Este método complementa la Regla Nº 10 (encuentra kc). Si k = 8 la fila en s1 se hace cero. Por lo tanto, el polinomio auxiliar es generado con la fila de s2 que es )4(2822 2202 +=+=+ sskss , por lo que,

Apuntes: 543 444 59
Copyright ©por Prof. José R. Espinoza
0 8 2s - 8 2s
4 - 12/)4(2:842)4(2:)(
2
2
3
2232
+
+
+
+=++++=+
sssssssssd
,
por lo que estable. ntemarginalme )2)(4()12/)(4(2)( 22 ⇒++=++= sssssd Caso Nº4: Raíces repetidas en el eje imaginario. En este caso aparecen varias filas idénticas a cero. Por ejemplo,
122))()()()(1()( 2345 +++++=−+−++= sssssjsjsjsjsssd
1ceros defila 0
11ceros defila 0
121121
0
1
2
3
4
5
ssssss
←ε
←εε,
podría pensarse que es estable si ε > 0, pero s4: s4 + 2s2 + 1 = (s2 + 1)2 s2 : s2 + 1 múltiple raíces ⇒ inestable.
C . Usos y Limitaciones. ¿ Cuál es el rango de k para que el sistema ilustrado en la Fig. 5.3 sea estable ? Para responder se obtiene la ecuación característica,
0)2)(1(
1)(1 =++
+=+sss
kskgr ⇒ 023 23 =+++ ksss ,
al aplicar Routh-Hurwitz se obtiene que a2a1 > a0 por lo que 3 · 2 > k ó k < 6, por lo que la ganancia crítica es kc = 6 y el rango entonces es, 0 < k < 6. Otra interrogante interesante es ¿ si el k vale k = 2, en cuánto se puede aumentar la ganancia en L.D.
R(s)+
−
Y(s)1(s + 1)(s + 2)
ks
Fig. 5.3 Sistema en lazo cerrado.

Apuntes: 543 444 60
Copyright ©por Prof. José R. Espinoza
antes de obtener un sistema inestable ?. Como k = 2 y kc = 6 la ganancia k se puede aumentar en un kc/k = 6/2 = 3 = 300%. Esta cantidad se conoce como el Margen de Ganancia. En general se puede definir un “margen de estabilidad” como el cuociente entre el valor estable máximo al valor actual. Por lo que para la ganancia se tiene que,
actualGanancia
máxima estableGanancia ..Ganancia de Margen == GM .
Este concepto tiene los siguientes problemas, (a) no se puede aplicar siempre (no todos los sistemas se hacen inestables cuando k → ∞) y (b) dos sistemas con igual M.G. pueden tener comportamientos totalmente diferentes. Además, ¿ qué sucede si la planta incluye retraso ?. En este caso,
Tsesdsnsgr −=)()()( ,
por lo que la ecuación característica es,
0)()( =+ −Tsesnsd ,
la cual no corresponde a un polinomio y por tanto no se pueden definir los coeficientes 011 ,,, aaan L− sin utilizar una simplificación. Para estos casos se tiene el Criterio de Nyquist.
5.3 Criterio de Nyquist.
El Criterio de Nyquist permite (entre otros) definir otro margen de estabilidad que complementa al margen de ganancia. Sea la F. de T. en L.D.: l(s), por lo que la ecuación característica es 1 + l(s) = f(s). Si s = σ + jω, entonces, f(σ + jω) = u + jv. Es decir, la función transformada f(σ + jω) puede ser también un número complejo. Ejemplo 5.4. Para 12)( += ssf que tiene un cero en s = −1/2, determine su contorno transformado. R.:
ω++σ=+ω+σ=ω+σ 2121)(2)( jjjf , por lo que ω=+σ= 2,12 vu . Ahora se procede a transformar cada segmento del contorno en s, A : B ⇒ σ = 1, ω: 1 → −1 ⇒ u = 3, v: 2 → −2 B : C ⇒ σ: 1 → −1, ω = −1 ⇒ u: 3 → −1, v = −2 C : D ⇒ σ = −1, ω: −1 → 1 ⇒ u = −1, v: −2 → 2 D : A ⇒ σ: −1 → 1, ω = 1 ⇒ u: −1 → 3, v = 2 El contorno resultante está en la Fig. 5.5. ♣
y(s)yd(s)+
−G(s)
H(s)
Fig. 5.4 Sistema en L.C. generalizado.
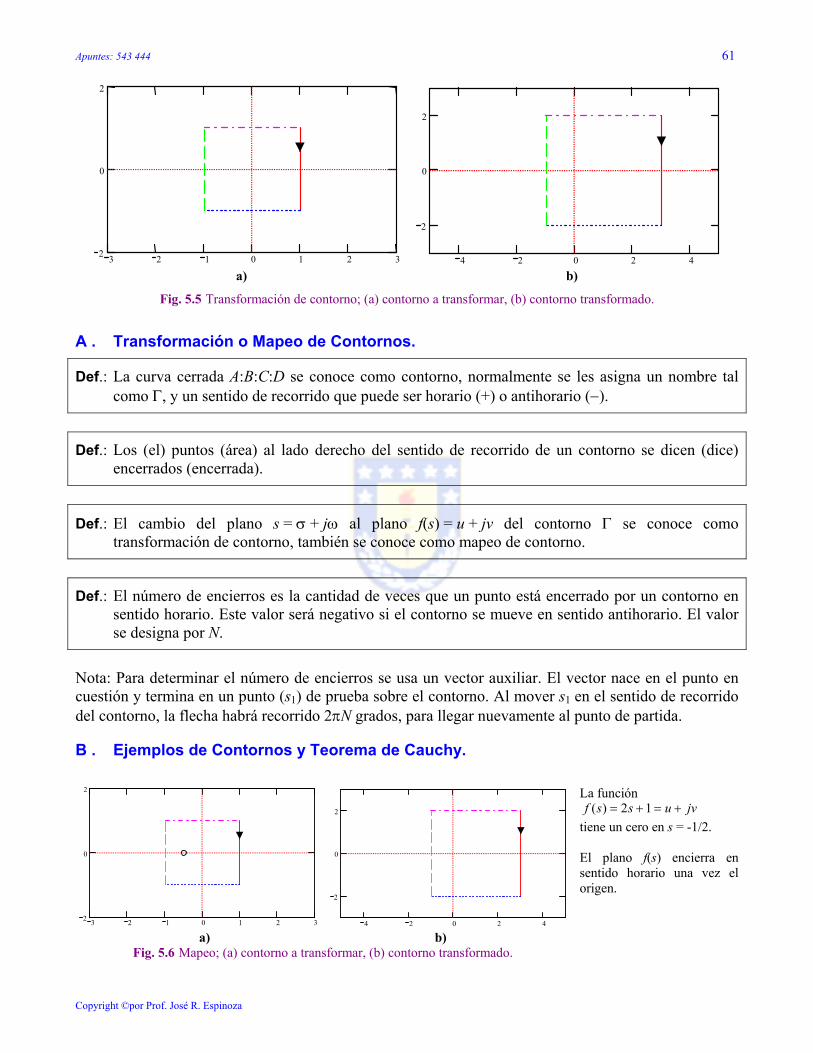
Apuntes: 543 444 61
Copyright ©por Prof. José R. Espinoza
A . Transformación o Mapeo de Contornos.
Def.: La curva cerrada A:B:C:D se conoce como contorno, normalmente se les asigna un nombre tal como Γ, y un sentido de recorrido que puede ser horario (+) o antihorario (−).
Def.: Los (el) puntos (área) al lado derecho del sentido de recorrido de un contorno se dicen (dice) encerrados (encerrada).
Def.: El cambio del plano s = σ + jω al plano f(s) = u + jv del contorno Γ se conoce como transformación de contorno, también se conoce como mapeo de contorno.
Def.: El número de encierros es la cantidad de veces que un punto está encerrado por un contorno en sentido horario. Este valor será negativo si el contorno se mueve en sentido antihorario. El valor se designa por N.
Nota: Para determinar el número de encierros se usa un vector auxiliar. El vector nace en el punto en cuestión y termina en un punto (s1) de prueba sobre el contorno. Al mover s1 en el sentido de recorrido del contorno, la flecha habrá recorrido 2πN grados, para llegar nuevamente al punto de partida.
B . Ejemplos de Contornos y Teorema de Cauchy.
3 2 1 0 1 2 32
0
2
4 2 0 2 4
2
0
2
a) b)
Fig. 5.6 Mapeo; (a) contorno a transformar, (b) contorno transformado.
La función jvussf +=+= 12)(
tiene un cero en s = -1/2. El plano f(s) encierra en sentido horario una vez el origen.
3 2 1 0 1 2 32
0
2
4 2 0 2 4
2
0
2
a) b)
Fig. 5.5 Transformación de contorno; (a) contorno a transformar, (b) contorno transformado.
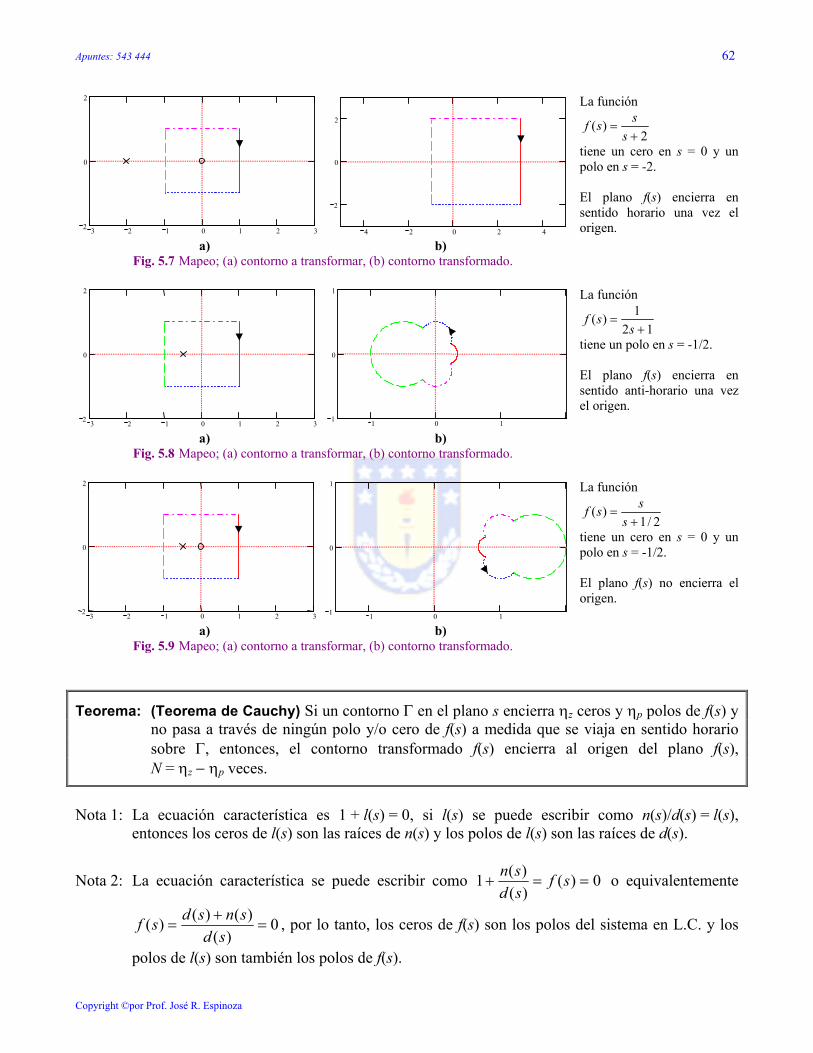
Apuntes: 543 444 62
Copyright ©por Prof. José R. Espinoza
3 2 1 0 1 2 32
0
2
4 2 0 2 4
2
0
2
a) b)
Fig. 5.7 Mapeo; (a) contorno a transformar, (b) contorno transformado.
La función
2)(
+=
sssf
tiene un cero en s = 0 y un polo en s = -2. El plano f(s) encierra en sentido horario una vez el origen.
3 2 1 0 1 2 32
0
2
1 0 11
0
1
a) b)
Fig. 5.8 Mapeo; (a) contorno a transformar, (b) contorno transformado.
La función
121)(+
=s
sf
tiene un polo en s = -1/2. El plano f(s) encierra en sentido anti-horario una vez el origen.
3 2 1 0 1 2 32
0
2
1 0 11
0
1
a) b) Fig. 5.9 Mapeo; (a) contorno a transformar, (b) contorno transformado.
La función
2/1)(
+=
sssf
tiene un cero en s = 0 y un polo en s = -1/2. El plano f(s) no encierra el origen.
Teorema: (Teorema de Cauchy) Si un contorno Γ en el plano s encierra ηz ceros y ηp polos de f(s) y no pasa a través de ningún polo y/o cero de f(s) a medida que se viaja en sentido horario sobre Γ, entonces, el contorno transformado f(s) encierra al origen del plano f(s), N = ηz − ηp veces.
Nota 1: La ecuación característica es 1 + l(s) = 0, si l(s) se puede escribir como n(s)/d(s) = l(s),
entonces los ceros de l(s) son las raíces de n(s) y los polos de l(s) son las raíces de d(s).
Nota 2: La ecuación característica se puede escribir como 0)()()(1 ==+ sf
sdsn o equivalentemente
0)(
)()()( =+
=sd
snsdsf , por lo tanto, los ceros de f(s) son los polos del sistema en L.C. y los
polos de l(s) son también los polos de f(s).

Apuntes: 543 444 63
Copyright ©por Prof. José R. Espinoza
Nota 3: Dado que f(s) = 1 + l(s), el origen de f(s) es equivalente a l(s) = −1 en el plano l(s). Por lo
tanto, el teorema de Cauchy se escribe como,
Teorema: (Teorema de Cauchy) Si un contorno Γ en el plano s encierra ηz ceros y ηp polos de 1 + l(s) y no pasa a través de ningún polo y/o cero de 1 + l(s) a medida que viaja en sentido horario sobre Γ, entonces, el contorno transformado l(s) encierra al punto (−1, 0) del plano l(s), N = ηz − ηp veces.
C . Criterio de Nyquist. Notar que si la función 1 + l(s) tiene ceros (es decir, ηz ≠ 0) en el S.P.D., entonces, el sistema es inestable. Por esto se usa un contorno Γ que encierra todo el S.P.D. (contorno de Nyquist ó Γ, Fig. 5.10) y se inspecciona el valor resultante de ηz. Para esto se utiliza el Teorema de Cauchy. Notar que el contorno que encierra todo el S.P.D. no debe pasar sobre ningún polo ni cero de 1 + l(s) (los polos de 1 + l(s) son los polos de l(s), los ceros de 1 + l(s) son indeterminados). Finalmente se puede enunciar el Criterio de Nyquist como,
Criterio de Nyquist. Un sistema realimentado es estable si y sólo si el contorno en el plano l(s) no encierra el punto (−1, 0) cuando el número de polos de l(s) en el S.P.D. del plano s es cero.
Este criterio se puede enunciar para el caso de tener en l(s) polos inestables.
Criterio de Nyquist. Un sistema realimentado es estable si y sólo si el contorno en el plano l(s) encierra el punto (−1, 0) en sentido anti-horario un número de veces igual al número de polos de l(s) con parte real positiva.
Ejemplo 5.5. Estudie la estabilidad de la F. de T. en L.D. 1
1)(+
=s
sgr si se utiliza en un esquema realimentado. R.: Hay
ηp = 0 polos inestables, por lo que N = 0 para tener un sistema estable. El contorno Γ transformado es,
10 0 10 20
10
0
10
r → ∞
Γ
A
B
C
Fig. 5.10 Contorno de Nyquist.
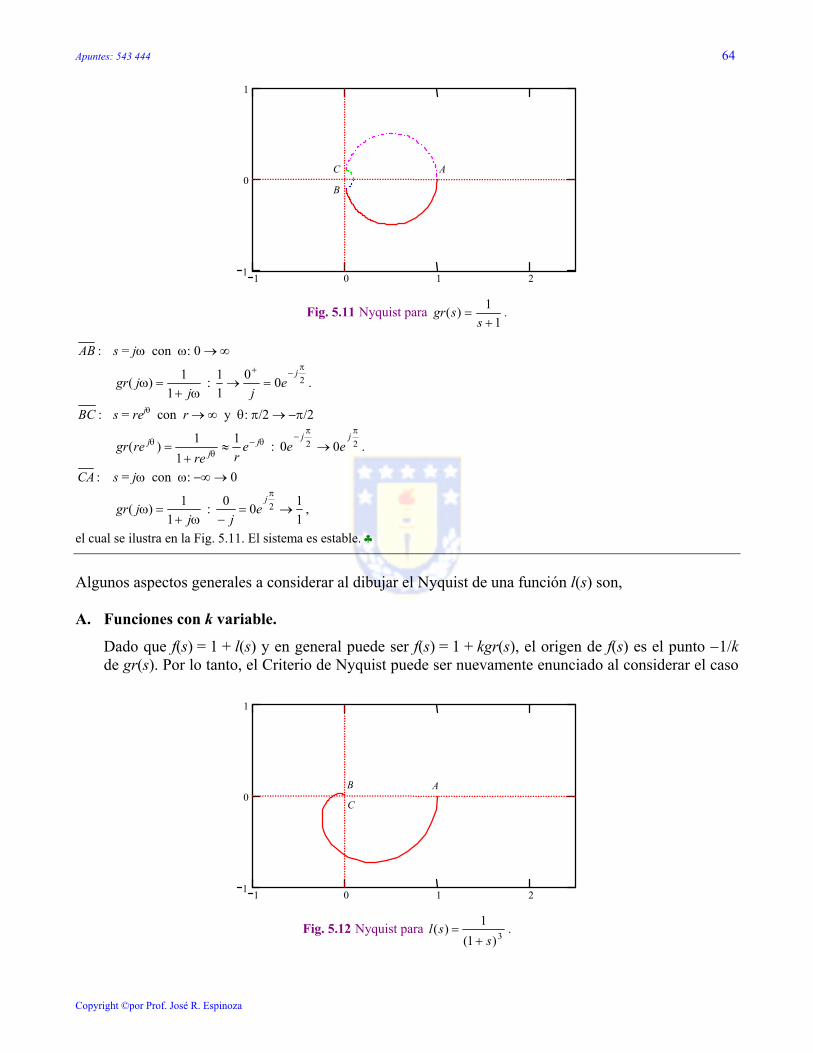
Apuntes: 543 444 64
Copyright ©por Prof. José R. Espinoza
:AB s = jω con ω: 0 → ∞
ω+
=ωj
jgr1
1)( : 20011
π−+
=→j
ej
.
:BC s = rejθ con r → ∞ y θ: π/2 → −π/2
θ−θ
θ ≈+
= jj
j erre
regr 11
1)( : 22 00ππ
−→
jjee .
:CA s = jω con ω: −∞ → 0
ω+
=ωj
jgr1
1)( : 1100 2 →=
−
πje
j,
el cual se ilustra en la Fig. 5.11. El sistema es estable. ♣
Algunos aspectos generales a considerar al dibujar el Nyquist de una función l(s) son, A. Funciones con k variable.
Dado que f(s) = 1 + l(s) y en general puede ser f(s) = 1 + kgr(s), el origen de f(s) es el punto −1/k de gr(s). Por lo tanto, el Criterio de Nyquist puede ser nuevamente enunciado al considerar el caso
1 0 1 21
0
1
A
B
C
Fig. 5.11 Nyquist para 1
1)(+
=s
sgr .
1 0 1 21
0
1
AB
C
Fig. 5.12 Nyquist para 3)1(
1)(s
sl+
= .

Apuntes: 543 444 65
Copyright ©por Prof. José R. Espinoza
general 1 + kgr(s), con el punto dado por −1/k. B. Funciones en L.D. estrictamente propias.
Funciones estrictamente propias son aquellas en que el denominador tiene un orden mayor que el numerador. En este caso el tramo BC del Contorno de Nyquist siempre se mapea al origen y no aporta información respecto de la estabilidad del sistema. En estos casos sólo se ocupará el tramo con jω con ω: −∞ → ∞.
C. Simetría respecto del eje real.
Para ∏∏
+
+=
)()(
j
i
pszs
gr , sólo basta obtener la transformación para ω: 0 → ∞ dado que para
ω: 0 → −∞ es simétrica.
Ejemplo 5.6. Estudie la estabilidad de la F. de T. en L.D. 3)1(
1)(s
sgr+
= si se utiliza en un esquema realimentado. R.:
Dado que ηp = 0 entonces N = 0 para tener un sistema estable. Se tiene gr(jω) 3)1(1
ω+=
j 2322
32
)3()31()3()31(
ω−ω+ω−ω−ω+ω−
=j , cuyo
Nyquist se muestra en la Fig. 5.12. El cruce sobre el eje real es cuando 0))((m =ωℑ jgr , 0)3(3 23 =−ωω=ω−ω ⇒
0=ω ; 3±=ω , 1)0( =jgr ; 8/1)3( −=gr . Por lo tanto, el sistema es estable si -∞ < -1/k < -1/8. ♣
D. Funciones con polos en el origen.
En este caso se re-define el contorno de Nyquist de manera de evitar los polos en el origen. En consecuencia, para cada caso en particular se redefinirá el contorno como en el ejemplo siguiente.
Ejemplo 5.7. Estudie la estabilidad de la F. de T. en L.D. )1(
1)(+τ
=ss
sgr si se utiliza en un esquema realimentado. R.:
El contorno de Nyquist se redefine como se ilustra en la Fig. 5.13(a) dado que gr(s) tiene un polo en el origen. Luego,
:AB −→∞−=∞
=+ωτω
=ω 0)1(
1)( jjjj
jgr .
10 0 10 20
10
0
10
r → ∞
Γ'
ε → 0
A
B
O C
2 0 2 420
0
20
-τ
A
B
C O
a) b)
Fig. 5.13 Criterio de Nyquist; (a) contorno modificado, y (b) Nyquist de )1(
1)(+τ
=ss
sgr .
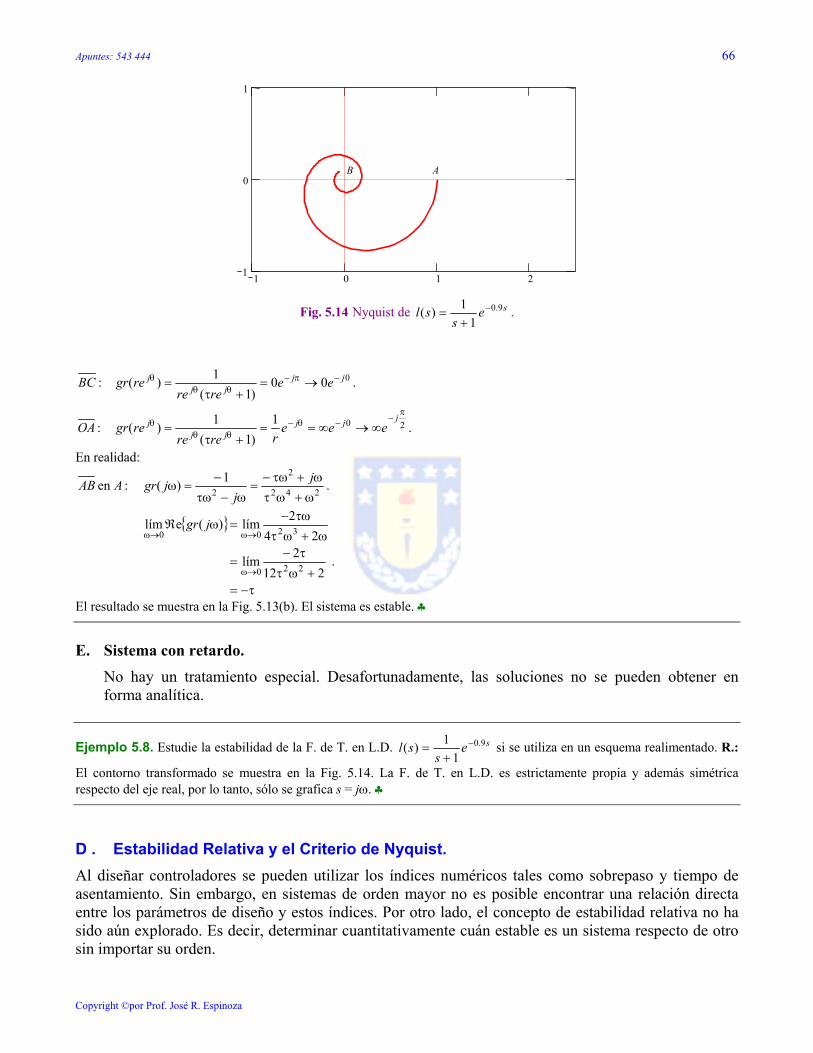
Apuntes: 543 444 66
Copyright ©por Prof. José R. Espinoza
:BC 000)1(
1)( jjjj
j eerere
regr −π−θθ
θ →=+τ
= .
:OA 201)1(
1)(π
−−θ−θθ
θ ∞→∞==+τ
=jjj
jjj eee
rrereregr .
En realidad:
:en AAB 242
2
21)(
ω+ωτω+τω−
=ω−τω
−=ω
jj
jgr .
τ−=+ωτ
τ−=
ω+ωττω−
=ωℜ
→ω
→ω→ω
2122lím
242lím)(elím
220
3200jgr
.
El resultado se muestra en la Fig. 5.13(b). El sistema es estable. ♣
E. Sistema con retardo.
No hay un tratamiento especial. Desafortunadamente, las soluciones no se pueden obtener en forma analítica.
Ejemplo 5.8. Estudie la estabilidad de la F. de T. en L.D. ses
sl 9.0
11)( −
+= si se utiliza en un esquema realimentado. R.:
El contorno transformado se muestra en la Fig. 5.14. La F. de T. en L.D. es estrictamente propia y además simétrica respecto del eje real, por lo tanto, sólo se grafica s = jω. ♣
D . Estabilidad Relativa y el Criterio de Nyquist. Al diseñar controladores se pueden utilizar los índices numéricos tales como sobrepaso y tiempo de asentamiento. Sin embargo, en sistemas de orden mayor no es posible encontrar una relación directa entre los parámetros de diseño y estos índices. Por otro lado, el concepto de estabilidad relativa no ha sido aún explorado. Es decir, determinar cuantitativamente cuán estable es un sistema respecto de otro sin importar su orden.
1 0 1 21
0
1
AB
Fig. 5.14 Nyquist de ses
sl 9.0
11)( −
+= .

Apuntes: 543 444 67
Copyright ©por Prof. José R. Espinoza
La idea es evaluar cuantitativamente cuan cerca/alejada está el contorno transformado de ser inestable, Fig. 5.15. Es decir, cuán alejada está la curva del punto (−1, 0). Para esto se cuantifica la ubicación de los puntos A y B. A es donde la curva corta el eje real, y B es donde la curva corta al círculo unitario. Con estas indicaciones se definen los índices de estabilidad.
Def.: Se define margen de ganancia (punto A) a la cantidad de ganancia en decibeles (dB) que se puede añadir al lazo antes de que el sistema en L.C. se torne inestable.
Así el margen de ganancia (M.G.) |)(|
1log20 10pjl ω
= |)(|log20 10 pjl ω−= ,
donde ωp es la frecuencia angular de cruce de fase definida por la ecuación,
º180)(arg =ωpjl ,
una representación gráfica se muestra en la Fig. 5.15 para un Nyquist arbitrario.
Def.: Se define el margen de fase (punto B) como el ángulo en grados que el contorno transformado l(jω) se debe rotar alrededor del origen para que el cruce de ganancia pase por el punto (−1, 0), donde el cruce de ganancia está definido por |)(| gjl ω = 1.
Así el margen de fase queda como M.F. = º180)(arg +ωgjl , una representación gráfica se muestra en la Fig. 5.15 para un Nyquist arbitrario. Es importante destacar que, - las definiciones anteriores tienen sentido en sistemas con l(s) de fase mínima (es decir, en sistemas
con l(s) sin ceros ni polos en el S.P.D. y estrictamente propias, - funciones con l(s) que contengan ceros en el eje imaginario o S.P.D. también pueden ser analizadas
con el criterio de Nyquist. A continuación se revisan algunos casos de interés.
A
B
1 0 1 2 3 4
1
0
1
|l(jωp)|
MF
Fig. 5.15 Nyquist de 32 )5.1()2.1()15(5.0)(
+++
=ss
ssl .
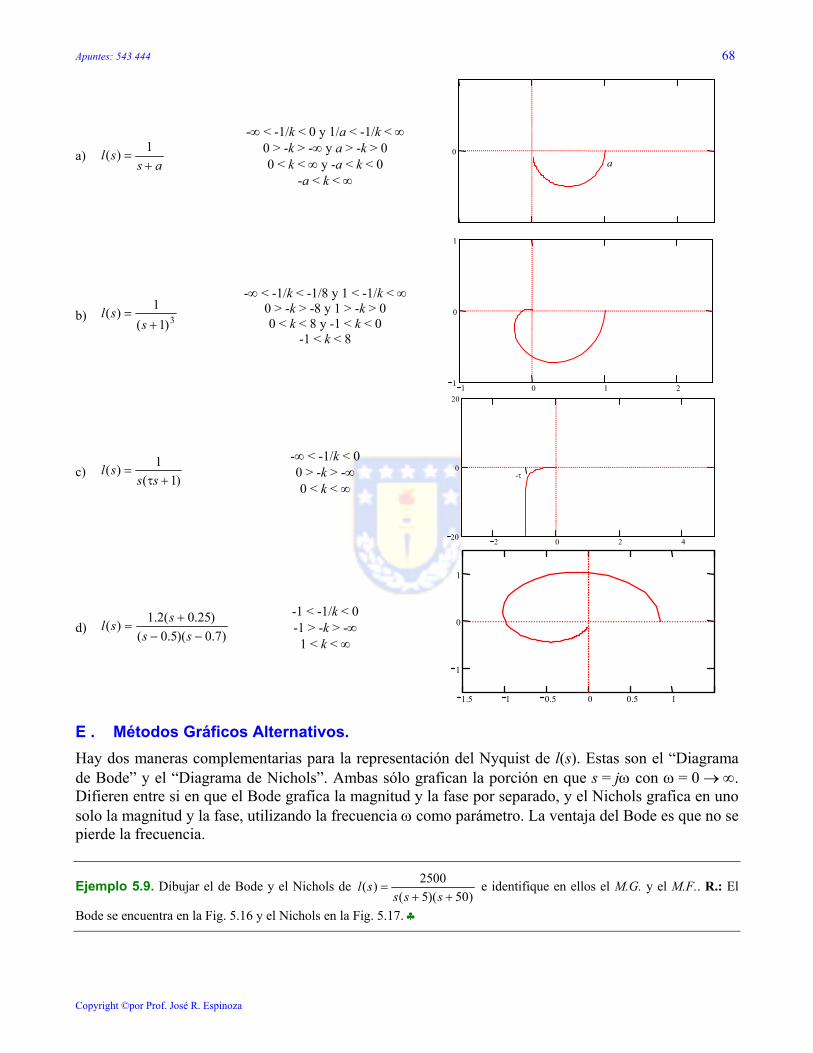
Apuntes: 543 444 68
Copyright ©por Prof. José R. Espinoza
a) as
sl+
=1)(
-∞ < -1/k < 0 y 1/a < -1/k < ∞ 0 > -k > -∞ y a > -k > 0 0 < k < ∞ y -a < k < 0
-a < k < ∞
a0
b) 3)1(1)(+
=s
sl -∞ < -1/k < -1/8 y 1 < -1/k < ∞
0 > -k > -8 y 1 > -k > 0 0 < k < 8 y -1 < k < 0
-1 < k < 8
1 0 1 21
0
1
c) )1(1)(+τ
=ss
sl -∞ < -1/k < 0 0 > -k > -∞ 0 < k < ∞
2 0 2 420
0
20
-τ
d) )7.0)(5.0()25.0(2.1)(
−−+
=ss
ssl -1 < -1/k < 0 -1 > -k > -∞ 1 < k < ∞
1.5 1 0.5 0 0.5 1
1
0
1
E . Métodos Gráficos Alternativos. Hay dos maneras complementarias para la representación del Nyquist de l(s). Estas son el “Diagrama de Bode” y el “Diagrama de Nichols”. Ambas sólo grafican la porción en que s = jω con ω = 0 → ∞. Difieren entre si en que el Bode grafica la magnitud y la fase por separado, y el Nichols grafica en uno solo la magnitud y la fase, utilizando la frecuencia ω como parámetro. La ventaja del Bode es que no se pierde la frecuencia.
Ejemplo 5.9. Dibujar el de Bode y el Nichols de )50)(5(
2500)(++
=sss
sl e identifique en ellos el M.G. y el M.F.. R.: El
Bode se encuentra en la Fig. 5.16 y el Nichols en la Fig. 5.17. ♣
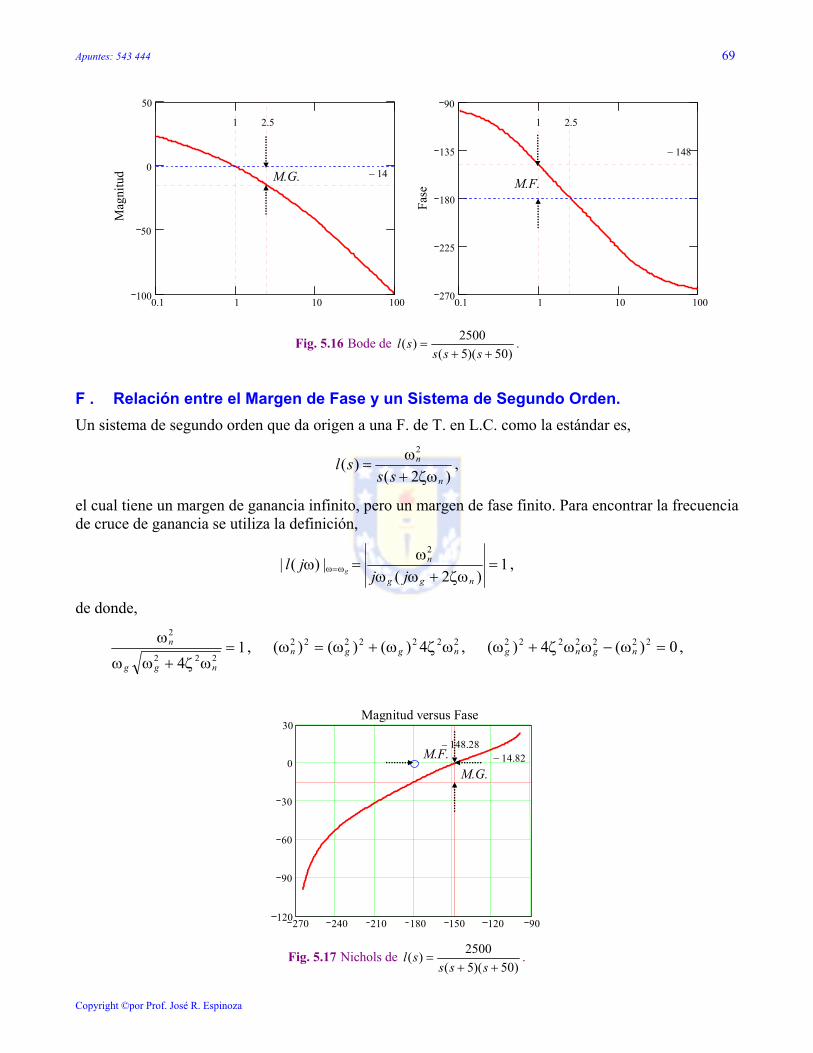
Apuntes: 543 444 69
Copyright ©por Prof. José R. Espinoza
F . Relación entre el Margen de Fase y un Sistema de Segundo Orden. Un sistema de segundo orden que da origen a una F. de T. en L.C. como la estándar es,
)2(
)(2
n
n
sssl
ζω+ω
= ,
el cual tiene un margen de ganancia infinito, pero un margen de fase finito. Para encontrar la frecuencia de cruce de ganancia se utiliza la definición,
1)2(
|)(|2
=ζω+ωω
ω=ω ω=ω
ngg
n
jjjl g ,
de donde,
14 222
2
=ωζ+ωω
ω
ngg
n , 2222222 4)()()( nggn ωζω+ω=ω , 0)(4)( 2222222 =ω−ωωζ+ω ngng ,
0.1 1 10 100100
50
0
50M
agni
tud 14−
1 2.5
0.1 1 10 100270
225
180
135
90
Fase
148−
1 2.5
Fig. 5.16 Bode de )50)(5(
2500)(++
=sss
sl .
270 240 210 180 150 120 90120
90
60
30
0
30Magnitud versus Fase
14.82−148.28−
Fig. 5.17 Nichols de )50)(5(
2500)(++
=sss
sl .
M.F. M.G.
M.G. M.F.
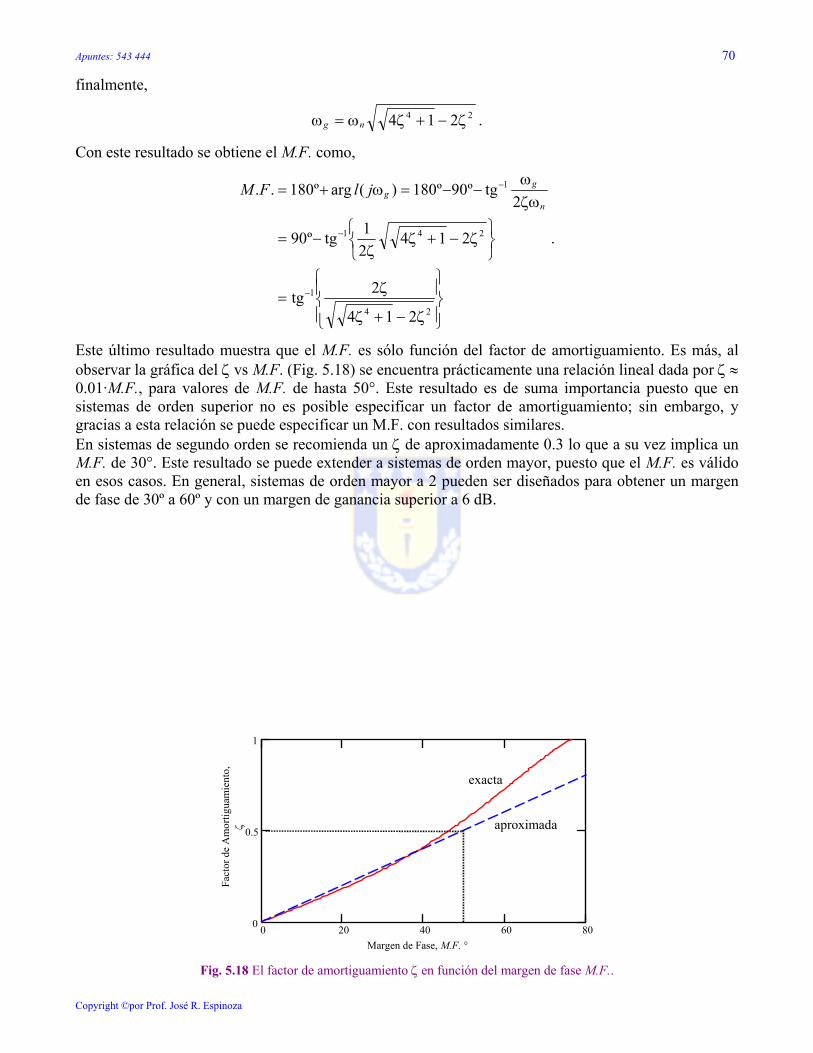
Apuntes: 543 444 70
Copyright ©por Prof. José R. Espinoza
finalmente,
24 214 ζ−+ζω=ω ng .
Con este resultado se obtiene el M.F. como,
ζ−+ζ
ζ=
ζ−+ζζ
−=
ζωω
−−=ω+=
−
−
−
24
1
241
1
214
2tg
21421tgº90
2tgº90º180)(argº180..
n
ggjlFM
.
Este último resultado muestra que el M.F. es sólo función del factor de amortiguamiento. Es más, al observar la gráfica del ζ vs M.F. (Fig. 5.18) se encuentra prácticamente una relación lineal dada por ζ ≈ 0.01·M.F., para valores de M.F. de hasta 50°. Este resultado es de suma importancia puesto que en sistemas de orden superior no es posible especificar un factor de amortiguamiento; sin embargo, y gracias a esta relación se puede especificar un M.F. con resultados similares. En sistemas de segundo orden se recomienda un ζ de aproximadamente 0.3 lo que a su vez implica un M.F. de 30°. Este resultado se puede extender a sistemas de orden mayor, puesto que el M.F. es válido en esos casos. En general, sistemas de orden mayor a 2 pueden ser diseñados para obtener un margen de fase de 30º a 60º y con un margen de ganancia superior a 6 dB.
0 20 40 60 80 0
0.5
1
Margen de Fase, M.F. °
Fact
or d
e A
mor
tigua
mie
nto,
ζ
exacta
aproximada
Fig. 5.18 El factor de amortiguamiento ζ en función del margen de fase M.F..
Apuntes: 543 444 71
Copyright ©por Prof. José R. Espinoza
6 Diseño y Compensación de Sistemas de Control.
Los análisis y herramientas desarrollados hasta aquí son útiles para determinar el controlador a utilizar en un esquema realimentado. Como se ha indicado, el controlador deberá permitir lograr características estáticas (error en estado estacionario, etc.) y dinámicas (sobrepaso, tiempo de asentamiento, etc.). En particular, se revisarán dos problemas, estos son, el tipo de controlador y luego el diseño de todas y cada una de sus componentes. Se encuentra que la mayoría de los sistemas pueden ser compensados con estructuras tales como red de adelanto, red de atraso y el más difundido de todos, el controlador P.I.D.
6.1 Introducción.
La estructura a estudiar se presenta en la Fig. 6.1, en donde deberá determinarse la estructura del controlador y los parámetros de éste, para cumplir con requerimientos tales como, - cero error en estado estacionario (yo = ydo), - estabilidad ( ∞≤|)(| ty , ∀t ≥ 0), - seguimiento ( 0)()( =− tytyd ), - regulación ( )()( tyty d→ ), - características dinámicas (sobrepaso, tiempo de asentamiento, margen de fase, de ganancia,...) - etc. en plantas del tipo lineales, invariantes en el tiempo, y SISO. La estructura del compensador podrá ser una red de adelanto, red de atraso, una combinación adelanto-atraso o un P.I.D.. La mayor diferencia entre los compensadores es que a excepción del compensador P.I.D., todos son compensadores de primer orden. Como herramientas de análisis y diseño se emplearán el L.G.R., Diagrama de Bode, y Nyquist.
6.2 Compensación en Adelanto.
El compensador es del tipo: Ts
TskTs
sTksc ccα+
+=
α++
α=11
11)( , donde debe cumplirse que el parámetro
yydplantacontrolador
u
Fig. 6.1 Sistema con compensador.
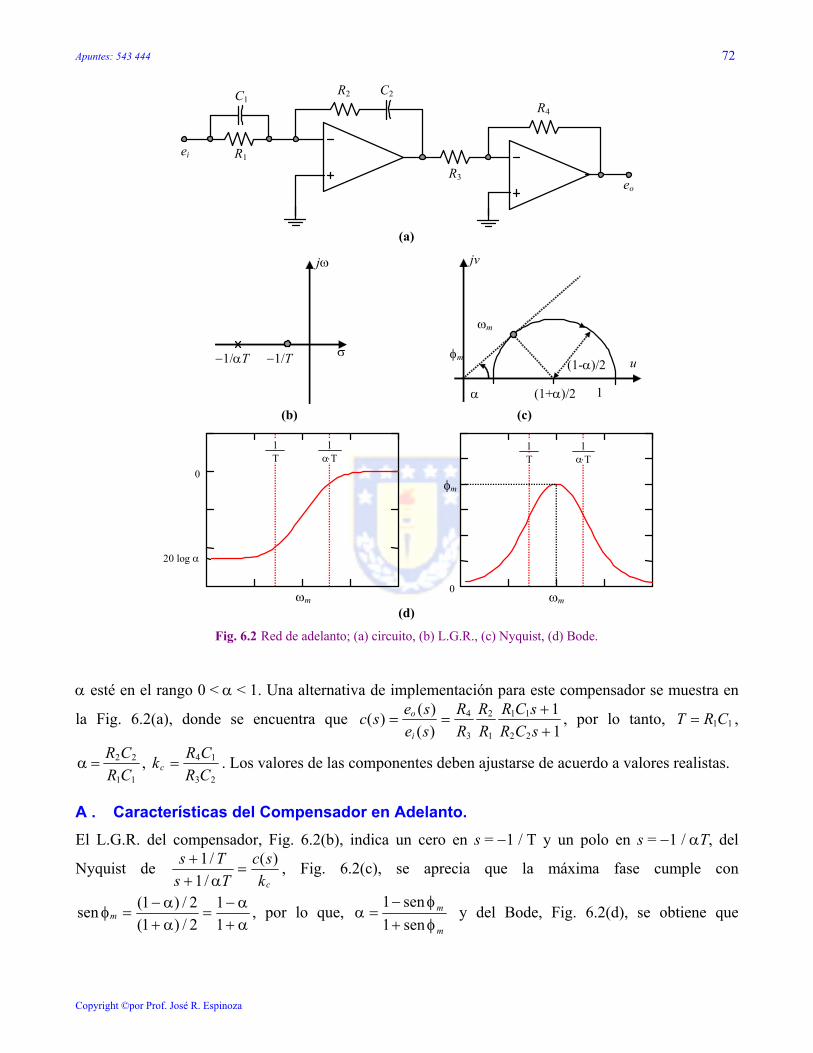
Apuntes: 543 444 72
Copyright ©por Prof. José R. Espinoza
α esté en el rango 0 < α < 1. Una alternativa de implementación para este compensador se muestra en
la Fig. 6.2(a), donde se encuentra que 11
)()()(
22
11
1
2
3
4
++
==sCRsCR
RR
RR
sesesc
i
o , por lo tanto, 11CRT = ,
11
22
CRCR
=α , 23
14
CRCRkc = . Los valores de las componentes deben ajustarse de acuerdo a valores realistas.
A . Características del Compensador en Adelanto. El L.G.R. del compensador, Fig. 6.2(b), indica un cero en s = −1 / T y un polo en s = −1 / αT, del
Nyquist de cksc
TsTs )(
/1/1
=α+
+ , Fig. 6.2(c), se aprecia que la máxima fase cumple con
α+α−
=α+α−
=φ11
2/)1(2/)1(sen m , por lo que,
m
m
φ+φ−
=αsen1sen1
y del Bode, Fig. 6.2(d), se obtiene que
eo
R2
R1ei
C1C2
R4
R3
(a)
σ
jω
−1/αT −1/T
jv
α 1 (1+α)/2
(1-α)/2
ωm
φm u
(b) (c)
20 log α
0
1T
1α⋅
ωm0
φm
T
ωm
1T
1α⋅T
(d)
Fig. 6.2 Red de adelanto; (a) circuito, (b) L.G.R., (c) Nyquist, (d) Bode.

Apuntes: 543 444 73
Copyright ©por Prof. José R. Espinoza
α+=ω
TTm1log1log
21log por lo que,
TTm
α=
α=ω
1)(
12
. Con estos antecedentes se puede
enunciar un procedimiento para el diseño de una red de adelanto.
B . Técnicas de Compensación en Adelanto Basadas en el L.G.R. El procedimiento es el siguiente: 1.- Enumerar las especificaciones solicitadas a la respuesta del sistema en el tiempo. Traducir éstas a
una ubicación deseada para los polos dominantes. 2.- Dibujar el L.G.R. del sistema no compensado y determinar si es posible que la ganancia lleve los
polos del sistema en L.C. a la ubicación deseada. 3.- Si el compensador es necesario, colocar el cero de la red de adelanto bajo la ubicación de los polos
en L.C. deseadas. 4.- Determinar la ubicación del polo restante de manera que cumpla con la condición de ángulo. 5.- Calcular la ganancia del sistema en L.D. y así determinar la ganancia del controlador. Calcular la
ganancia de error estático que corresponda (kp, kv, ó ka). 6.- Si la ganancia de error estático fue especificada y no se cumple, ubicar el cero más a la izquierda
del punto original del compensador y volver a 4.
Ejemplo 6.1. Se tiene: )2(
1+
=ss
gr y se desea ζ = 0.45, ζωn = 4 ⇒ ts = 1s, y kv = 15 en L.C.. R.: Al utilizar una
realimentación unitaria con ganancia k, no se consigue llevar las raíces al lugar deseado, Fig. 6.3(a). Se propone la red de
adelanto, ckTs
Tsα+
+/1/1 , (3) indica que 41
=T
, (4) indica que º1801321 −=φ−φ+φ+φ zppp , por lo que,
º11.49º90
º15.104º74.116
3
1
2
1
=φ
=φ=φ=φ
p
z
p
p
, además, 4?
93.7tg 3 −=φ p ⇒ 86.104
tg93.7?
3=+
φ=
p, resumiendo, 86.10/1 =αT , T = 0.25,
α = 0.368, la ganancia es 87.9517.888.893.748.10)2(
)/1()/1(
93.74
=⋅=++
α+=
+−= jsc ss
TsTsk , con lo que
10 5 0
10
5
0
5
10
7.93−
7.934− 0
10 5 0
10
5
0
5
10
7.93−
7.934− 0
(a) (b)
Fig. 6.3 L.G.R. del Ejemplo 6.1; (a) sólo ganancia, (b) con compensador.
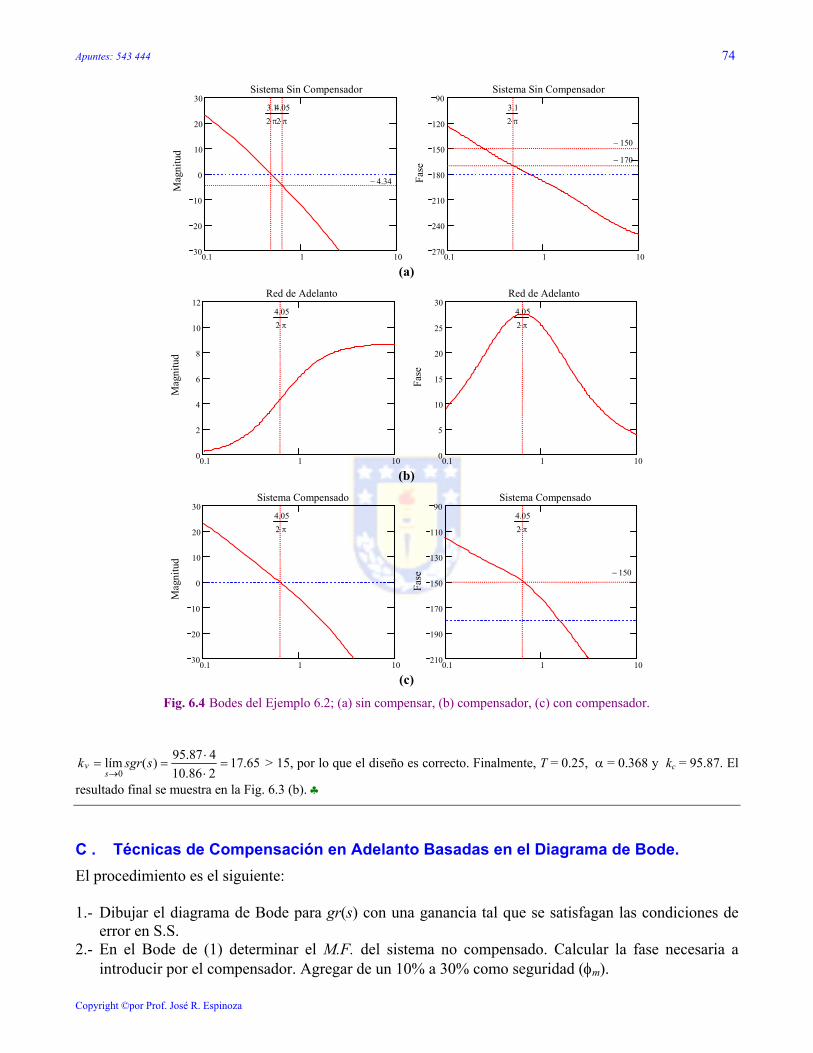
Apuntes: 543 444 74
Copyright ©por Prof. José R. Espinoza
65.17286.10487.95)(lím
0=
⋅⋅
==→
ssgrks
v > 15, por lo que el diseño es correcto. Finalmente, T = 0.25, α = 0.368 y kc = 95.87. El
resultado final se muestra en la Fig. 6.3 (b). ♣
C . Técnicas de Compensación en Adelanto Basadas en el Diagrama de Bode. El procedimiento es el siguiente: 1.- Dibujar el diagrama de Bode para gr(s) con una ganancia tal que se satisfagan las condiciones de
error en S.S. 2.- En el Bode de (1) determinar el M.F. del sistema no compensado. Calcular la fase necesaria a
introducir por el compensador. Agregar de un 10% a 30% como seguridad (φm).
0.1 1 1030
20
10
0
10
20
30Sistema Sin Compensador
Mag
nitu
d4.34−
4.052 π⋅
3.12 π⋅
0.1 1 10270
240
210
180
150
120
90Sistema Sin Compensador
Fase
150−
170−
3.12 π⋅
(a)
0.1 1 100
2
4
6
8
10
12Red de Adelanto
Mag
nitu
d
4.052 π⋅
0.1 1 100
5
10
15
20
25
30Red de Adelanto
Fase
4.052 π⋅
(b)
0.1 1 1030
20
10
0
10
20
30Sistema Compensado
Mag
nitu
d
4.052 π⋅
0.1 1 10210
190
170
150
130
110
90Sistema Compensado
Fase 150−
4.052 π⋅
(c)
Fig. 6.4 Bodes del Ejemplo 6.2; (a) sin compensar, (b) compensador, (c) con compensador.

Apuntes: 543 444 75
Copyright ©por Prof. José R. Espinoza
3.- Utilizando α+α−
=φ11sen m , determinar
m
m
φ+φ−
=αsen1sen1
.
4.- Calcular la ganancia necesaria h(dB) = 10 log α. 5.- Ubicar en el Bode de (1) la frecuencia (ωm) a la cual la atenuación es de h(dB) y utilizando
TTm
α=
α=ω
112
determinar T.
6.- Dibujar el Bode compensado, si las condiciones no se cumplen volver a (2) y utilizar otro margen de seguridad.
Ejemplo 6.2. Se tiene )20)(1(
)(++
=sss
ksg y se pide ess ≤ 10% para entrada rampa y un M.F. ≥ 30º. R.: (1) Como se
desea 1.020/
1==
kess , entonces k = 200. (2) Como M.F. = 10º entonces φm = 20º + 8º = 28º por lo que α = 0.361. (4)
h = 10 log α = −4.34, (5) por lo que ωm = 4.05 y por lo tanto, T = 0.406. Nótese que 200200 =αck por lo que
71.21=
α=ck . Finalmente, c(s) =
TsTsk
sss c α++
++ /1/1
)20)(1(200 . Los Bodes relevantes se muestran en la Fig. 6.4. ♣
6.3 Compensación en Atraso.
El compensador es del tipo: Ts
TskTs
sTksc ccα+
+=
α++
α=11
11)( , donde debe cumplirse que el parámetro
α > 1. Una alternativa de implementación para este compensador se muestra en la Fig. 6.5(a), donde se
encuentra que 11
)()()(
22
11
1
2
3
4
++
==sCRsCR
RR
RR
sesesc
i
o , con 11CRT = , 11
22
CRCR
=α y 23
14
CRCRkc = . Los valores de
las componentes deben ajustarse de acuerdo a valores realistas.
A . Características del Compensador en Atraso. El L.G.R. del compensador, Fig. 6.5(b), indica un cero en s = −1 / T y un polo en s = −1 / αT, del
Nyquist de cksc
TsTs )(
/1/1
=α+
+ , Fig. 6.5(c), se aprecia que la máxima fase cumple con
α+−α
=α+
−α=φ
11
2/)1(2/)1(sen m por lo que
m
m
φ+φ−
=αsen1sen1
(con φm < 0) y del Bode, Fig. 6.5(d), se obtiene
que
α+=ω
TTm1log1log
21log por lo que,
TTm
α=
α=ω
1)(
12
. Con estos antecedentes se puede
enunciar un procedimiento para el diseño de una red de adelanto.
B . Técnicas de Compensación para la Red de Atraso Utilizando L.G.R. El procedimiento es el siguiente: 1.- Dibujar el L.G.R. para el sistema no compensado.
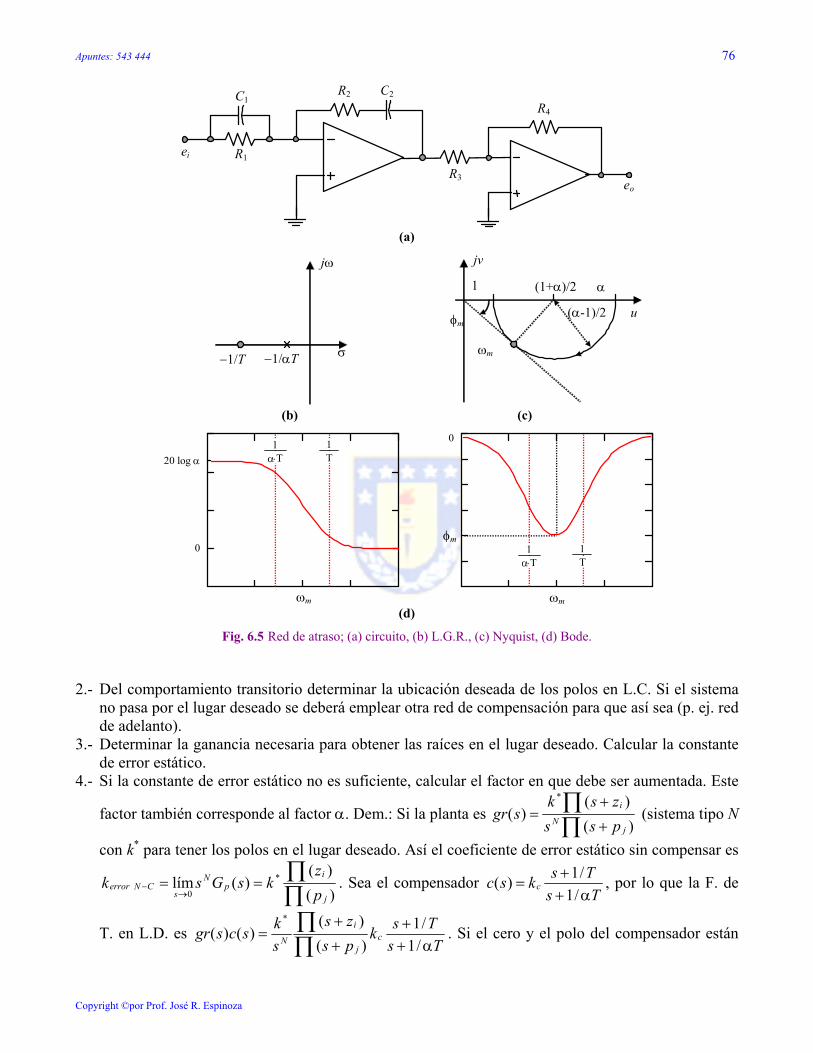
Apuntes: 543 444 76
Copyright ©por Prof. José R. Espinoza
2.- Del comportamiento transitorio determinar la ubicación deseada de los polos en L.C. Si el sistema no pasa por el lugar deseado se deberá emplear otra red de compensación para que así sea (p. ej. red de adelanto).
3.- Determinar la ganancia necesaria para obtener las raíces en el lugar deseado. Calcular la constante de error estático.
4.- Si la constante de error estático no es suficiente, calcular el factor en que debe ser aumentada. Este
factor también corresponde al factor α. Dem.: Si la planta es ∏∏
+
+=
)()(
)(*
jN
i
psszsk
sgr (sistema tipo N
con k* para tener los polos en el lugar deseado. Así el coeficiente de error estático sin compensar es
∏∏==
→−
)()(
)(lím *
0
j
ip
N
sCNerror
pz
ksGsk . Sea el compensador Ts
Tsksc cα+
+=
/1/1)( , por lo que la F. de
T. en L.D. es Ts
Tskpszs
skscsgr c
j
i
N α++
+
+=
∏∏
/1/1
)()(
)()(*
. Si el cero y el polo del compensador están
eo
R2
R1ei
C1C2
R4
R3
(a)
σ
jω
−1/αT −1/T
jv
1 α (1+α)/2
(α-1)/2
ωm
φmu
(b) (c)
20 log α
0
1T
1α⋅
ωm
0
φm
T
ωm
1T
1α⋅T
(d)
Fig. 6.5 Red de atraso; (a) circuito, (b) L.G.R., (c) Nyquist, (d) Bode.
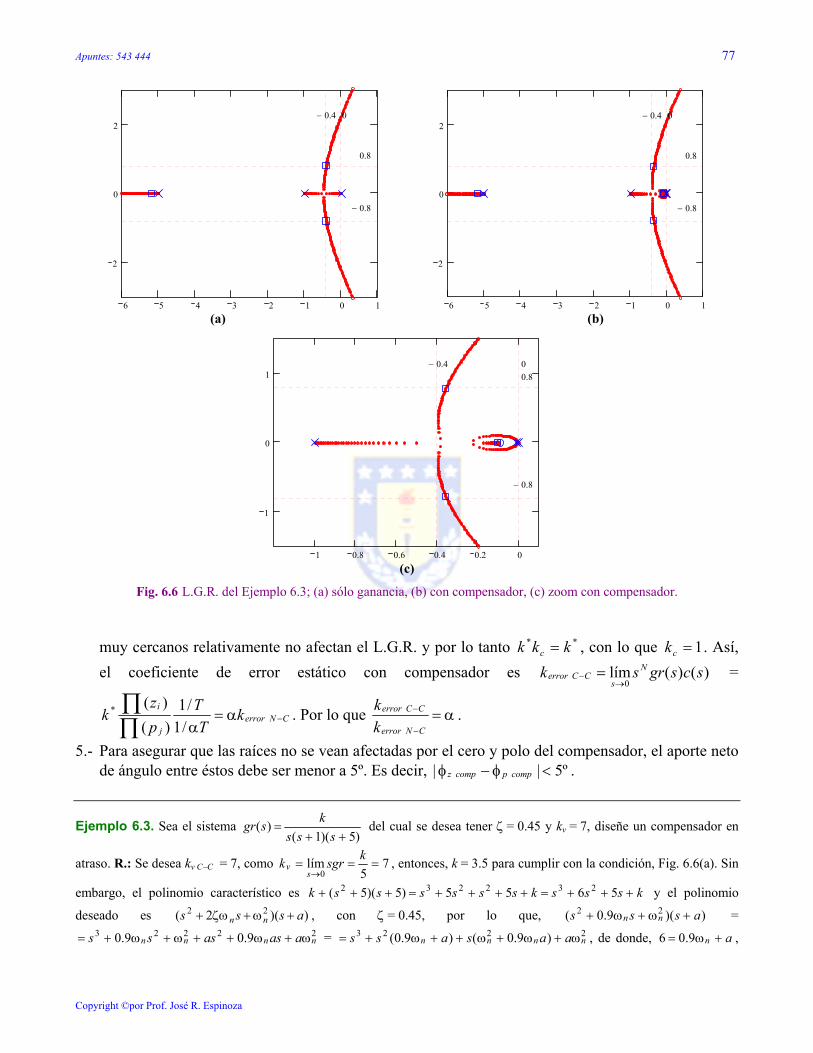
Apuntes: 543 444 77
Copyright ©por Prof. José R. Espinoza
muy cercanos relativamente no afectan el L.G.R. y por lo tanto ** kkk c = , con lo que 1=ck . Así, el coeficiente de error estático con compensador es )()(lím
0 scsgrsk N
sCCerror
→− = =
CNerrorj
ik
TT
pz
k −α=α∏
∏
*
/1/1
)()(
. Por lo que α=−
−
CNerror
CCerror
kk
.
5.- Para asegurar que las raíces no se vean afectadas por el cero y polo del compensador, el aporte neto de ángulo entre éstos debe ser menor a 5º. Es decir, º5|| <φ−φ comppcompz .
Ejemplo 6.3. Sea el sistema )5)(1(
)(++
=sss
ksgr del cual se desea tener ζ = 0.45 y kv = 7, diseñe un compensador en
atraso. R.: Se desea kv C−C = 7, como 75
lím0
===→
ksgrks
v , entonces, k = 3.5 para cumplir con la condición, Fig. 6.6(a). Sin
embargo, el polinomio característico es kssskssssssk +++=++++=+++ 5655)5)(5( 232232 y el polinomio
deseado es ))(2( 22 asss nn +ω+ζω+ , con ζ = 0.45, por lo que, ))(9.0( 22 asss nn +ω+ω+ = 22223 9.09.0 nnnn aasasss ω+ω++ω+ω+= = 2223 )9.0()9.0( nnnn aasass ω+ω+ω++ω+= , de donde, an +ω= 9.06 ,
6 5 4 3 2 1 0 1
2
0
2
0.8−
0.8
0.4− 0
6 5 4 3 2 1 0 1
2
0
2
0.8−
0.8
0.4− 0
(a) (b)
1 0.8 0.6 0.4 0.2 0
1
0
1
0.8−
0.80.4− 0
(c)
Fig. 6.6 L.G.R. del Ejemplo 6.3; (a) sólo ganancia, (b) con compensador, (c) zoom con compensador.

Apuntes: 543 444 78
Copyright ©por Prof. José R. Espinoza
ann ω+ω= 9.05 2 , nak ω= , por lo que, na ω−= 9.06 , 222 81.04.5)9.06(9.05 nnnnnn ω−ω+ω=ω−ω+ω= ,
054.519.0 2 =−ω+ω nn , de donde, 8976.019.02
519.044.54.5 2=
⋅⋅⋅+±−
=ωn , y entonces: 192.5=α , 4.0=ζωn ,
8.01 2 =ζ−ωn y 183.4=k . Con estos resultados se tiene que 8366.05183.4
5===
kkv , por lo que, 8366.0 =−CNvk .
Así, 37.8
==α−
−
CNv
CCv
kk
. Sea T = 10 por lo que, 012.0/11.0/1
=α=
TT
, º87.1158.0
012.04.0tgº90 1 =
−
+=φ −compp ,
º55.1108.0
1.04.0tgº90 1 =
−
+=φ −compz , por lo tanto, º31.5 =φ−φ compzcompp , Fig. 6.6(b), que está cerca del los 5°. Si los
5° deben ser exactos, se puede utilizar la expresión siguiente, º1
/1tg
1
/1tgº5
2
1
2
1 ∆=
ζ−ω
−ζω−
ζ−ω
α−ζω= −−
n
n
n
n TT, entonces,
0ºtg)1(1ºtg)1(ºtg 222 =∆+
−αζ−ω+∆+αζω−ω∆α nnn TT , lo que se puede escribir como, 02 =+− cTbaT , por
lo que, 56.102
42=
−±=
aacbbT , en este ejemplo. Finalmente, el compensador es
0113.00947.0
/1/1
++
=α+
+ss
TsTskc . ♣
Nota: Dado que el compensador incrementa el número de polos en 1, hay una raíz extra en L.C. Esta
raíz se encuentra muy cercana al cero del compensador. Como los ceros se conservan en L.C.
éste cancela el efecto del polo adicional. Dem.: Se definen las F. de T. como, gr
gr
dnksgr =)( ,
TsTsksc c
α++
=/1/1)( ,
r
r
dnsr =)( , por lo tanto la F de T. en L.C. es
gcrgc
+1 =
rrcgrgr
cgrgr
dnTsTskdknTsTskdkn
/)/1/()/1(/1)/1/()/1(/
⋅α++⋅+α++⋅ =
)/1()/1()/1(
TsnkkTsdddTsnkk
grcrgr
rgrc
++α++ .
Se aprecia que en L.C. el cero del compensador aparece en su forma original. Este cancela la raíz extra del compensador.
C . Técnica de Compensación para la Red de Atraso Utilizando el Diagrama de Bode. El procedimiento es el siguiente: 1.- Dibujar el Bode del sistema sin compensador pero con la ganancia ajustada de manera de cumplir
con la premisa del coeficiente de error estático, de donde se obtiene kcα ≥ 1. 2.- Determinar el M.F. del sistema. Si no es suficiente, proceder de acuerdo a lo siguiente. 3.- Determinar del gráfico la frecuencia (ωg’) a la cual se generaría un M.F. igual al deseado más 5º. 4.- Colocar el cero del compensador una década por debajo de ωg’, es decir, 1/T = ωg’/10. 5.- Medir la atenuación necesaria en ωg’ y obtener kc de |)'(|log20 gjgr ω=α .
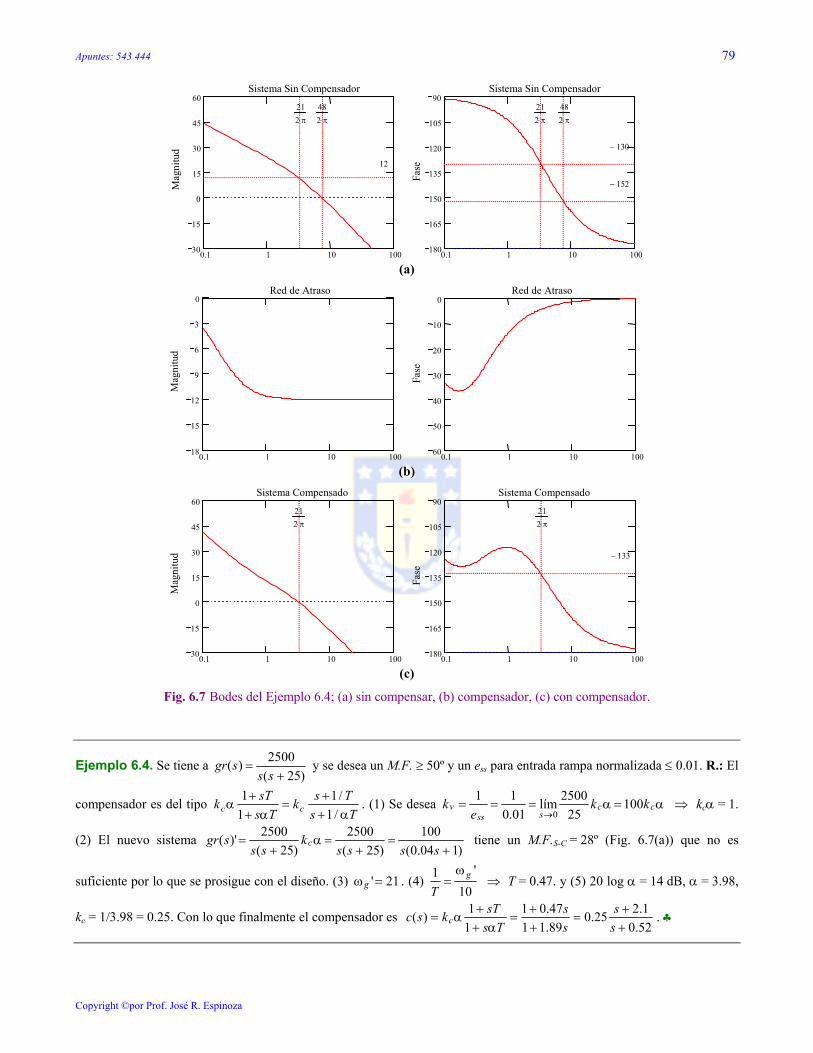
Apuntes: 543 444 79
Copyright ©por Prof. José R. Espinoza
Ejemplo 6.4. Se tiene a )25(
2500)(+
=ss
sgr y se desea un M.F. ≥ 50º y un ess para entrada rampa normalizada ≤ 0.01. R.: El
compensador es del tipo Ts
TskTs
sTk cc α++
=α+
+α
/1/1
11 . (1) Se desea α=α===
→cc
sssv kk
ek 100
252500lím
01.011
0 ⇒ kcα = 1.
(2) El nuevo sistema )104.0(
100)25(
2500)25(
2500)'(+
=+
=α+
=ssss
kss
sgr c tiene un M.F.S-C = 28º (Fig. 6.7(a)) que no es
suficiente por lo que se prosigue con el diseño. (3) 21' =ωg . (4) 10
'1 g
Tω
= ⇒ T = 0.47. y (5) 20 log α = 14 dB, α = 3.98,
kc = 1/3.98 = 0.25. Con lo que finalmente el compensador es 52.01.225.0
89.1147.01
11)(
++
=++
=α+
+α=
ss
ss
TssTksc c . ♣
0.1 1 10 10030
15
0
15
30
45
60Sistema Sin Compensador
Mag
nitu
d12
482 π⋅
212 π⋅
0.1 1 10 100180
165
150
135
120
105
90Sistema Sin Compensador
Fase
130−
152−
212 π⋅
482 π⋅
(a)
0.1 1 10 10018
15
12
9
6
3
0Red de Atraso
Mag
nitu
d
0.1 1 10 10060
50
40
30
20
10
0Red de Atraso
Fase
(b)
0.1 1 10 10030
15
0
15
30
45
60Sistema Compensado
Mag
nitu
d
212 π⋅
0.1 1 10 100180
165
150
135
120
105
90Sistema Compensado
Fase
133−
212 π⋅
(c)
Fig. 6.7 Bodes del Ejemplo 6.4; (a) sin compensar, (b) compensador, (c) con compensador.
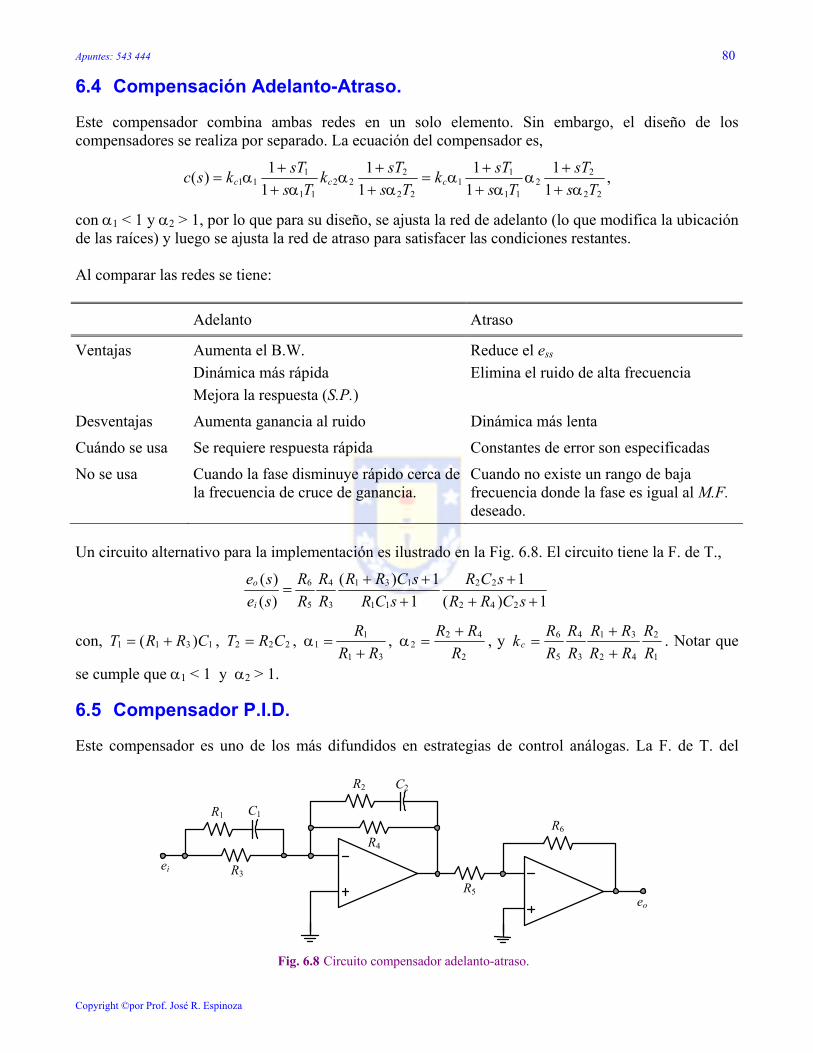
Apuntes: 543 444 80
Copyright ©por Prof. José R. Espinoza
6.4 Compensación Adelanto-Atraso.
Este compensador combina ambas redes en un solo elemento. Sin embargo, el diseño de los compensadores se realiza por separado. La ecuación del compensador es,
22
22
11
11
22
222
11
111 1
111
11
11)(
TssT
TssTk
TssTk
TssTksc ccc
α++
αα+
+α=
α++
αα+
+α= ,
con α1 < 1 y α2 > 1, por lo que para su diseño, se ajusta la red de adelanto (lo que modifica la ubicación de las raíces) y luego se ajusta la red de atraso para satisfacer las condiciones restantes. Al comparar las redes se tiene:
Adelanto Atraso
Ventajas Aumenta el B.W. Dinámica más rápida Mejora la respuesta (S.P.)
Reduce el ess Elimina el ruido de alta frecuencia
Desventajas Aumenta ganancia al ruido Dinámica más lenta
Cuándo se usa Se requiere respuesta rápida Constantes de error son especificadas
No se usa Cuando la fase disminuye rápido cerca de la frecuencia de cruce de ganancia.
Cuando no existe un rango de baja frecuencia donde la fase es igual al M.F. deseado.
Un circuito alternativo para la implementación es ilustrado en la Fig. 6.8. El circuito tiene la F. de T.,
1)(
11
1)()()(
242
22
11
131
3
4
5
6
+++
+++
=sCRR
sCRsCR
sCRRRR
RR
sese
i
o
con, 1311 )( CRRT += , 222 CRT = , 31
11
RRR+
=α , 2
422
RRR +
=α , y 1
2
42
31
3
4
5
6
RR
RRRR
RR
RRkc
++
= . Notar que
se cumple que α1 < 1 y α2 > 1.
6.5 Compensador P.I.D.
Este compensador es uno de los más difundidos en estrategias de control análogas. La F. de T. del
eo
R2
R3ei
C1
C2
R6
R5
R1
R4
Fig. 6.8 Circuito compensador adelanto-atraso.

Apuntes: 543 444 81
Copyright ©por Prof. José R. Espinoza
compensador es,
++= sT
sTk
sesu
di
p11
)()( ,
donde, kp : ganancia proporcional, Ti : tiempo integral, y Td : tiempo derivativo. Su nombre P.I.D. es por proporcional, integrativo y derivativo. En el dominio del tiempo el controlador es,
++= ∫∞−
)()(1)()( tedtdTdtte
Ttektu d
t
ip ,
lo que en Laplace se puede escribir como,
skskk
sesu
di
p ++=)()( ,
donde, kp : ganancia proporcional, ki : ganancia integral y kd : ganancia derivativa. Un circuito tentativo para la implementación del P.I.D. es el ilustrado en la Fig. 6.9 cuyas ecuaciones son,
++
++
+= s
CRCRCRCR
sCRCRCRCRCR
RR
ee
i
o
2211
2211
221121
2211
3
4
)(11 ,
donde, 21
2211
3
4
CRCRCR
RRk p
+= , 2211 CRCRTi += y
2211
2211
CRCRCRCRTd
+= .
El problema es cómo diseñar los parámetros de un P.I.D. si se considera que tiene un polo en el origen y dos ceros ubicables arbitrariamente de acuerdo a la siguiente representación,
sT
sTsTTksTsT
ksci
idipd
ip
111)(2 ++
=
++= .
Para simplificar el problema se estudian los modos de operación del P.I.D.
A . Modos de Operación. Proporcional (Ti → ∞ , Td → 0)
pksc =)( ,
en una planta se ajusta kp para asegurar un ess o M.F. dados. Proporcional – integral (Td → 0)
eo
R2
R1ei
C1C2
R4
R3
Fig. 6.9 Circuito para un compensador P.I.D.
Apuntes: 543 444 82
Copyright ©por Prof. José R. Espinoza
+
=
+=
sTsTk
sTksc
i
ip
ip
111)( ,
es una red de atraso, Ts
Tskc α++
/1/1 con α > 1, con α → ∞,
TsTsk
sTsk cc
1/1 +=
+ .
Proporcional – derivativo (Ti → ∞).
)1()( sTksc dp += ,
es una red de adelanto: Ts
sTkc α++
α11 con α < 1, con α → 0: )1(' Tskc + .
B . Sintonización de un P.I.D. Esta metodología está basada en la determinación aproximada de los parámetros kp, Ti y Td. Se distinguen dos casos, el primero para sistemas que pueden operar en L.A. y el segundo para sistemas que sólo pueden operar en L.C. En este último se distinguen entre sistemas que pueden oscilar en forma sostenida y los que no lo pueden hacer. Compensación empírica en L.A. (Ziegler-Nichols en L.A.) Se utiliza en sistemas que pueden operar en L.A. como son los sistemas estables. Los parámetros del controlador se fijan en función de la respuesta de la planta en L.A. a una entrada escalón que se asume de primer orden y con retardo, Fig. 6.10. En particular se escogen los parámetros de acuerdo a la tabla siguiente.
kp Ti Td
P. dt/τ ∞ 0
P.I. dt/9.0 τ 3.0/dt 0
yd u+ −
P.I.D.kp, Ti, Td
Plantay
t
1 τ
td
u
t
k
y
Fig. 6.10 Sintonización de un P.I.D. en L.A. (Ziegler-Nichols en L.A.).
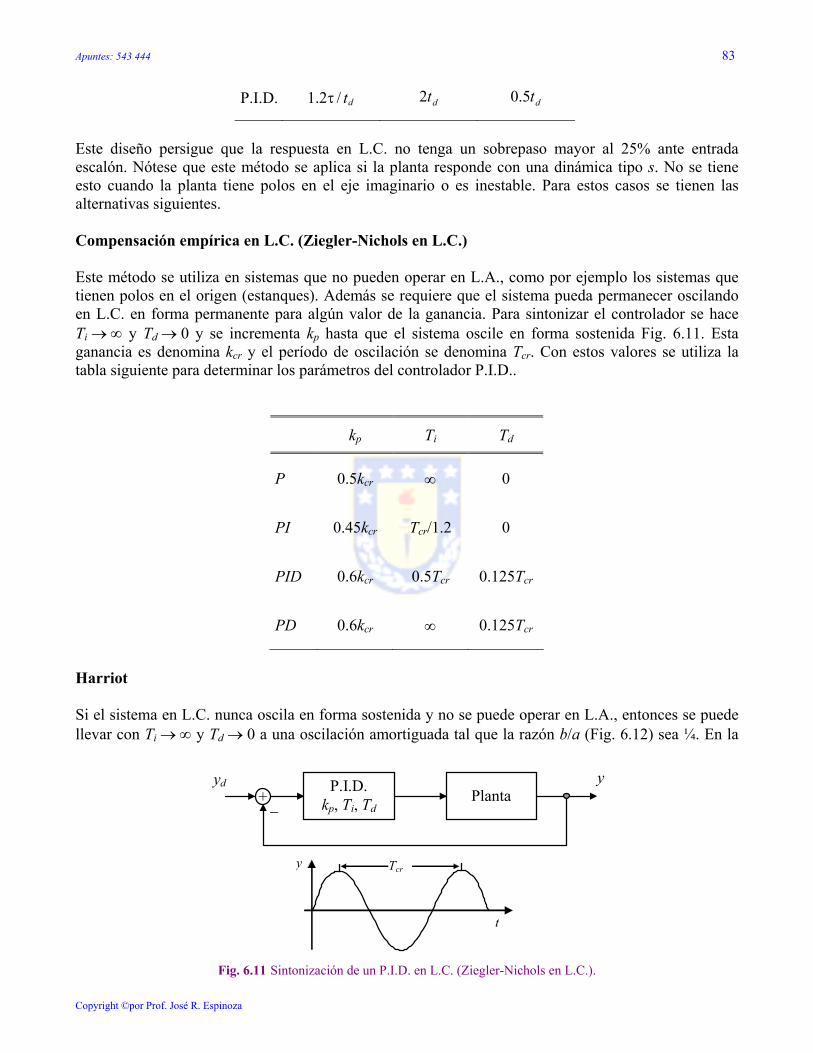
Apuntes: 543 444 83
Copyright ©por Prof. José R. Espinoza
P.I.D. dt/2.1 τ dt2 dt5.0
Este diseño persigue que la respuesta en L.C. no tenga un sobrepaso mayor al 25% ante entrada escalón. Nótese que este método se aplica si la planta responde con una dinámica tipo s. No se tiene esto cuando la planta tiene polos en el eje imaginario o es inestable. Para estos casos se tienen las alternativas siguientes. Compensación empírica en L.C. (Ziegler-Nichols en L.C.) Este método se utiliza en sistemas que no pueden operar en L.A., como por ejemplo los sistemas que tienen polos en el origen (estanques). Además se requiere que el sistema pueda permanecer oscilando en L.C. en forma permanente para algún valor de la ganancia. Para sintonizar el controlador se hace Ti → ∞ y Td → 0 y se incrementa kp hasta que el sistema oscile en forma sostenida Fig. 6.11. Esta ganancia es denomina kcr y el período de oscilación se denomina Tcr. Con estos valores se utiliza la tabla siguiente para determinar los parámetros del controlador P.I.D..
kp Ti Td
P 0.5kcr ∞ 0
PI 0.45kcr Tcr/1.2 0
PID 0.6kcr 0.5Tcr 0.125Tcr
PD 0.6kcr ∞ 0.125Tcr
Harriot Si el sistema en L.C. nunca oscila en forma sostenida y no se puede operar en L.A., entonces se puede llevar con Ti → ∞ y Td → 0 a una oscilación amortiguada tal que la razón b/a (Fig. 6.12) sea ¼. En la
yd+
−
P.I.D.kp, Ti, Td
Plantay
t
y Tcr
Fig. 6.11 Sintonización de un P.I.D. en L.C. (Ziegler-Nichols en L.C.).
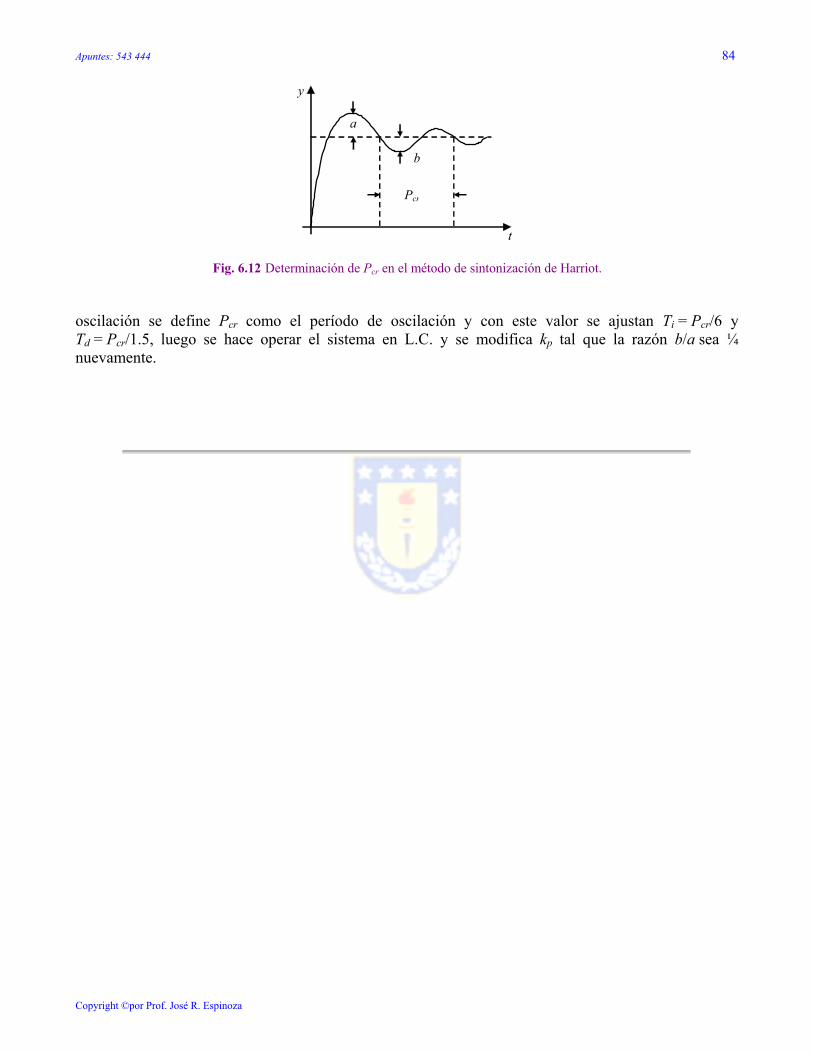
Apuntes: 543 444 84
Copyright ©por Prof. José R. Espinoza
oscilación se define Pcr como el período de oscilación y con este valor se ajustan Ti = Pcr/6 y Td = Pcr/1.5, luego se hace operar el sistema en L.C. y se modifica kp tal que la razón b/a sea ¼ nuevamente.
t
Pcr
a
b
y
Fig. 6.12 Determinación de Pcr en el método de sintonización de Harriot.
Apuntes: 543 444 85
Copyright ©por Prof. José R. Espinoza
Bibliografía. - R. Dorf, “Modern Control Systems”, Addison-Wesley Publishing Comp. 1995, 7th edition.
- T. Kailath, “Linear Systems”, Prentice Hall 1980.
- E. Kreyszig, “Advanced Engineering Mathematics”, John Wiley & Sons 1993, 7th edition.
- B. Kuo, “Sistemas de Control Automático”, Prentice-Hall 1996, 7ma edición.
- K. Ogata, “Ingeniería de Control Moderna”, Prentice-Hall 1993, 2da edición.
- W. Rugh, “Linear System Theory”, Prentice-Hall. 1996, 2nd edition.
Apuntes: 543 444 86
Copyright ©por Prof. José R. Espinoza
Índice Alfabético. A
análisis de sistemas ........................................................50 ancho de banda ..............................................................34
C
clasificación de sistemas continuos/discretos....................................................12 determinísticos/estocásticos ......................................12 invariantes/variantes .................................................12 lineales/no-lineales....................................................12 parámetros concentrados/distribuidos.......................12 SISO/MIMO .............................................................12
coeficientes de error estático..........................................24 compensador P.I.D. .......................................................81
modos de operación ..................................................82 sintonización .............................................................83
constante de tiempo .......................................................17 contorno.........................................................................61 control..............................................................................4 controladores
adaptivos ...................................................................11 de razón.......................................................................9 en cascada .................................................................10 en L.A. ........................................................................5 prealimentado..............................................................8 realimentado................................................................4
criterio Nyquist................................................................60, 63 Routh-Hurwitz ..........................................................56
críticamente amortiguado ..............................................30 críticamente estable .......................................................30
D
diagrama de Bode ..........................................................68 diagrama de Nichols ......................................................68
E
entradas normalizadas....................................................23 errores en estado estacionario ........................................22 estabilidad
absoluta .....................................................................56 entrada cero...............................................................55 entrada-acotada/salida-acotada .................................55 inestabilidad ..............................................................56 marginal ....................................................................56 relativa ......................................................................66
estabilización .................................................................21
F
factor de amortiguamiento.............................................70
G
ganancia.........................................................................17
H
Harriot............................................................................84
L
L.G.R. ............................................................................40 k negativo..................................................................52 método ......................................................................42 parámetros arbitrarios ...............................................50 parámetros múltiples.................................................53
M
magnitudes características .............................................31 banda de asentamiento ..............................................31 sobrepaso ..................................................................31 tiempo de asentamiento ............................................31
mapeo de contornos .......................................................61 margen de fase.........................................................67, 69 margen de ganancia .......................................................67
N
número de encierros.......................................................61
O
oscilaciones....................................................................19
P
perturbaciones................................................................15 pico de resonancia .........................................................33 planta ...............................................................................4 polos dominantes ...........................................................35 predictor de Smith .........................................................38 proceso.............................................................................4
R
red de compensación adelanto/atraso ............................81 red de compensación en adelanto ..................................71
características............................................................72 diseño con Bode........................................................74 diseño con L.G.R. .....................................................73
red de compensación en atraso ......................................75 características............................................................75 diseño con Bode........................................................79 diseño con L.G.R. .....................................................75
reducción de orden.........................................................35 ruido...............................................................................17
S
sensibilidad ....................................................................15 sintonización de controladores ......................................53 sistema .............................................................................4 sobreamortiguado ..........................................................31 subamortiguado .............................................................30
T
teorema de Cauchy ........................................................62 tipos de sistema
con retardo ................................................................37 lazo abierto/lazo cerrado.............................................2 primer orden..............................................................27
Apuntes: 543 444 87
Copyright ©por Prof. José R. Espinoza
segundo orden .....................................................30, 33 Tipo N .......................................................................24
V
variable controlada ..........................................................4 variable de salida .............................................................4
variable manipulada.........................................................4 variables perturbadoras....................................................4
Z
Ziegler-Nichols en L.A..................................................83 Ziegler-Nichols en L.C. .................................................84


















