Appunti formattati 9 giugno2017wpage.unina.it/rmartino/Idrodinamica/Moti a potenziale...moti viscosi...
44
Interazioni fluido-solido 93 ( 1 1 ' σ U V Q - = (5-58) 5.4. Moti a potenziale Si dice che un campo di vettori velocità v r ammette un potenziale, quando esiste una funzione scalare ( t z y x , , , Φ = Φ (5-59) le cui derivate parziali in ogni punto siano uguali alle componenti u, v, w del vettore velocità nello stesso punto: z y x ∂ Φ ∂ = ∂ Φ ∂ = ∂ Φ ∂ = w v u (5-60) La funzione Φ(x,y,z,t), che può essere descritta da una serie di superfici i cui punti hanno lo stesso valore di Φ (superfici equipotenziali), viene detta il “potenziale” di v r . Il vettore v r è quindi pari a: Φ ∇ = Φ = grad v r (5-61) e il moto viene detto a potenziale di velocità 1 . L’introduzione del potenziale corrisponde a un cambiamento di variabile, cioè come incognita non compare la velocità ma una funzione scalare con il vantaggio di dovere determinare una funzione scalare piuttosto che una incognita vettoriale. Chiaramente la funzione potenziale non è definita univocamente ma a meno di una costante: questa arbitrarietà non pone comunque alcun problema nei riguardi della determinazione del campo di moto poiché il vettore velocità non dipenderà dal valore della costante. Il vettore velocità può quindi scriversi come: 1 Come si vedrà nel capitolo 11, tale equazione presenta una struttura uguale a quella della legge di Darcy per moti filtranti in un mezzo poroso omogeneo e isotropo e ciò rende la teoria dei moti a potenziale particolarmente efficace nello studio dei moti di filtrazione complessi. Altri campi di applicazione sono rappresentati dallo studio dei moti viscosi come nel caso dei moti a bassa velocità propri della foronomia e delle onde marine, da quello dei campi idrodinamici indotti dalla presenza di ostacoli.
Transcript of Appunti formattati 9 giugno2017wpage.unina.it/rmartino/Idrodinamica/Moti a potenziale...moti viscosi...
Interazioni fluido-solido
93
( ) 11' σUVQ −= (5-58)
5.4. Moti a potenziale
Si dice che un campo di vettori velocità vr
ammette un potenziale, quando esiste una funzione scalare
( )tzyx ,,,Φ=Φ (5-59)
le cui derivate parziali in ogni punto siano uguali alle componenti u, v, w del vettore velocità nello stesso punto:
z
y
x
∂Φ∂=
∂Φ∂=
∂Φ∂=
w
v
u
(5-60)
La funzione Φ(x,y,z,t), che può essere descritta da una serie di superfici i cui punti hanno lo stesso valore di Φ (superfici equipotenziali), viene detta il “potenziale” di v
r. Il vettore v
r è quindi pari a:
Φ∇=Φ= gradvr
(5-61)
e il moto viene detto a potenziale di velocità1. L’introduzione del potenziale corrisponde a un cambiamento di variabile,
cioè come incognita non compare la velocità ma una funzione scalare con il vantaggio di dovere determinare una funzione scalare piuttosto che una incognita vettoriale. Chiaramente la funzione potenziale non è definita univocamente ma a meno di una costante: questa arbitrarietà non pone comunque alcun problema nei riguardi della determinazione del campo di moto poiché il vettore velocità non dipenderà dal valore della costante.
Il vettore velocità può quindi scriversi come:
1 Come si vedrà nel capitolo 11, tale equazione presenta una struttura uguale a
quella della legge di Darcy per moti filtranti in un mezzo poroso omogeneo e isotropo e ciò rende la teoria dei moti a potenziale particolarmente efficace nello studio dei moti di filtrazione complessi. Altri campi di applicazione sono rappresentati dallo studio dei moti viscosi come nel caso dei moti a bassa velocità propri della foronomia e delle onde marine, da quello dei campi idrodinamici indotti dalla presenza di ostacoli.

Dispense di Idraulica 94
kz
jy
ix
kji ˆˆˆˆwˆvˆuv∂Φ∂+
∂Φ∂+
∂Φ∂=++=r
(5-62)
La componente della velocità lungo una direzione s sarà quindi
ss ∂Φ∂=v (5-63)
Nell’ipotesi di fluido incomprimibile, l’equazione di continuità può scritta come:
0vwvu
vdiv =⋅∇=∂∂+
∂∂+
∂∂= rr
zyx (5-64)
Sostituendo in essa le espressioni (5-60) si ottiene:
02
2
2
2
2
22 =
∂Φ∂+
∂Φ∂+
∂Φ∂=Φ∇
zyx (5-65)
mostrando che, se il fluido è incomprimibile, la funzione potenziale è una funzione armonica poichè soddisfa l’equazione di Laplace (5-65).
Considerando un generico vettore spostamento pari a
kzjdyidxds ˆdˆˆ ++= (5-66)
la variazione dΦ che ne consegue risulta pari a
Φ⋅=∂Φ∂+
∂Φ∂+
∂Φ∂=Φ graddsdz
zdy
ydx
xd (5-67)
Se lo spostamento avviene lungo la superficie equipotenziale si ha
0grad =Φ⋅=Φ dsd (5-68)
e cioè
0v =⋅ rds (5-69)
da cui deriva la proprietà delle superfici equipotenziali di essere ortogonali alla velocità.
Definendo il vettore vorticità come il rotore della velocità, esso fornisce una misura della rotazione di una particella fluida essendo pari al doppio della velocità angolare ωr cioè

Interazioni fluido-solido
95
vrot2
1 rr=ω (5-70)
Se in un punto del campo di moto la vorticità non è uguale a zero, significa quindi che in quel punto la particella sta ruotando (moto rotazionale), mentre se la vorticità è uguale a zero la particella non ruota (moto irrotazionale). I moti a potenziale si dicono anche irrotazionali perché in essi è nullo il rotore di v
r,
accadendo che
( )
( )
( ) 0yxxyy
u
x
vvrot
0xzzxx
w
z
uvrot
0zyyzz
v
y
wvrot
22
z
22
y
22
x
=
∂∂Φ∂−
∂∂Φ∂=
∂∂−
∂∂=
=
∂∂Φ∂−
∂∂Φ∂=
∂∂−
∂∂=
=
∂∂Φ∂−
∂∂Φ∂=
∂∂−
∂∂=
r
r
r
(5-71)
Se il moto è irrotazionale, le equazioni (2-61) di Navier-Stokes si possono scrivere:
( ) ( ) ( )Φ∇∇−∇=Φ∇∇−∇=∇−∇=− 222v µµµρ pppAFrrr
(5-72)
che, per la (5-65) valida nel caso di fluido incomprimibile, si riducono all’equazione di Eulero
( ) pAF grad=−rr
ρ (5-73)
mostrando che le soluzioni di un moto di un fluido perfetto sono compatibili con quelle di un moto irrotazionale di un fluido reale incomprimibile, a patto che le condizioni al contorno nei due casi siano coincidenti. Nell’ipotesi di moto stazionario l’equazione di Eulero si trasforma in
∂∂+
∂∂+
∂∂ρ=∇−∇
zyxpz
vw
vv
vu -
rrr
ρ (5-74)
La proiezione sull’asse x di quest’ultima è
∂∂+
∂∂+
∂∂=
∂
∂−
∂∂
zyxg
p
z uw
uv
uu
1
xx-
γ
(5-75)
che se il moto è irrotazionale si può scrivere
Dispense di Idraulica 96
∂∂+
∂∂+
∂∂=
∂
∂−
∂∂
xxxg
p
z ww
vv
uu
1
xx-
γ
(5-76)
cioè
∂∂+
∂∂+
∂∂=
∂
∂−
∂∂
xxxg
p
z 222 wvu
2
1
xx-
γ
(5-77)
e quindi
( )xg
p
z
∂++∂=
∂
∂−
∂∂ 222 wvu
2
1
xx-
γ
(5-78)
equivalente a
xg
p
z
∂∂
=∂
∂−
∂∂ v
2
1
xx-
rγ
(5-79)
Ripetendo il ragionamento anche su y e su z si può scrivere
0v2
1
2 =∇+
∇+∇ r
g
pz
γ (5-80)
e quindi
0v2
1
2 =
++∇ r
g
pz
γ (5-81)
che può scriversi come
costv2
1
2 =++ r
g
pz
γ (5-82)
Questa relazione è formalmente identica alla tesi del teorema di Bernoulli; però, a differenza di quest’ultimo, essa afferma che, con le stesse ipotesi ad eccezione di quella di fluido perfetto, se il campo di velocità è anche irrotazionale, il trinomio di Bernoulli ha un unico valore in tutto il dominio del
Interazioni fluido-solido
97
moto e non unicamente sulla singola traiettoria. Ciò mostra che l’approssimazione di moto irrotazionale è più restrittiva di quella di fluido non viscoso. L’ipotesi di moto irrotazionale determina quindi un legame, rappresentato dalla (5-82), tra le due funzioni incognite del problema del moto, modulo della velocità e pressione. Tale legame sussiste tra due qualsiasi punti del campo di moto, non necessariamente appartenenti a una stessa traiettoria.
La risoluzione dell’equazione differenziale (5-65) permette di ottenere la funzione potenziale in tutto il campo di moto una volta note le condizioni al contorno che possono essere di due tipologie: una condizione denominata di Neumann1, del tipo
nn
ˆv ⋅=∂Φ∂ r
(5-83)
che impone il flusso attraverso la superficie di frontiera del campo di moto e che può essere nullo nel caso di superficie impermeabile; oppure una seconda, denominata di Dirichlet2, del tipo
*Φ=Φ (5-84)
in cui Φ* è un valore noto del potenziale su una parte della superficie di frontiera. Si nota quindi che, dato il carattere dell’equazione di Laplace, le condizioni al contorno non permettono di imporre una condizione di aderenza che impedisca al fluido di scorrere su una superficie materiale. Pertanto, il campo di moto di un fluido viscoso a ridotta distanza da una superficie materiale non può essere risolto come irrotazionale.
Una volta noto il potenziale in tutto il campo di moto, è possibile valutare la velocità in ogni punto del campo del campo di moto tramite le equazioni (5-60) e successivamente la pressione tramite l’equazione di Bernoulli. L’equazione (5-65) è lineare e, pertanto, può essere applicato il principio di sovrapposizione degli effetti: è possibile quindi costruire soluzioni complesse tramite la sovrapposizione di soluzioni semplici note, impiegando il cosiddetto metodo delle singolarità idrodinamiche.
1 Fisico-matematico ungherese del ‘900. 2 Matematico tedesco del secolo ‘800.

Dispense di Idraulica 98
Figura 5-8
Con riferimento al caso piano di Figura 5-8, si fissi nel piano del moto un sistema di coordinate cartesiane ed un punto P di coordinate (x, z), e siano l1 e l2 due archi di curve regolari che uniscono P con l’origine O delle coordinate. In ciascun punto di l1 e l2, sia vn la componente del vettore velocità nella direzione della normale n̂
alla curva, positiva se il vettore velocità è orientato in senso orario rispetto a O. Fissato come verso di percorrenza delle curve quello da O verso P, le quantità:
∫=Ψ1
v1
l
ndl (5-85)
e
∫=Ψ2
v2
l
ndl (5-86)
rappresentano i volumi (per unità di profondità) di fluido che attraversano le due curve nell’unità di tempo.
Per il principio di continuità, nell’ipotesi di fluido incomprimibile, il volume che complessivamente attraversa la curva chiusa formata da l1 e l2 deve essere nullo, in assenza di sorgenti interne. Pertanto il volume entrante attraverso l1 deve essere uguale a quello uscente da l2. Poiché questo risultato deve essere verificato comunque si scelgano le curve che congiungono l’origine delle coordinate al punto P, ne segue che il flusso di massa che attraversa la generica curva l che congiunge l’origine O al punto P, dipende solo dalle coordinate di P. Ciò consente di definire l’integrale curvilineo lungo una generica curva che congiunge il punto P(x, z) all’origine del sistema di coordinate
( ) ( )
∫∫ ⋅==ΨzxP
O
zxP
O
n dlndl,,
ˆvvr
(5-87)

Interazioni fluido-solido
99
come una funzione delle sole coordinate del punto, poiché indipendente dalla linea di integrazione; esso rappresenta la portata volumetrica che attraversa la linea stessa e prende il nome di funzione di corrente. Se l’arco PP’ appartiene a una linea di corrente, tratteggiata in Figura 5-8, la portata che lo attraversa è nulla poiché il vettore velocità è sempre tangente a esso in ogni suo punto e quindi su PP’ si può scrivere
0ˆv =⋅=Ψ dlndr
(5-88)
mostrando che la funzione Ψ assume un valore costante lungo una linea di corrente.
Figura 5-9
Considerati due punti P(x, z) e P+dP (x+dx, z+dz) e un arco infinitesimo di lunghezza dl che li congiunge (Figura 5-9). Il versore diretto da P a P+dP sarà pari a
kdl
idl
xl ˆdzˆd +=∧
(5-89)
mentre il versore ad esso normale sarà pari a
kdl
idl
zn ˆdxˆdˆ −= (5-90)
Si può quindi scrivere che
( ) ( ) dzdxkxizkidlnd uwˆdˆdˆwˆuˆv +−=−⋅+=⋅=Ψ r (5-91)
Dispense di Idraulica 100
Poiché
dzz
dxx
d∂Ψ∂+
∂Ψ∂=Ψ (5-92)
si ottiene che
w−=∂Ψ∂x
(5-93)
e che
u=∂Ψ∂z
(5-94)
Queste ultime due prendono il nome di relazioni di Cauchy. Se il moto è a potenziale, il rotore della velocità è nullo e quindi
zx ∂∂=
∂∂ uw
(5-95)
cioè
02
2
2
2
=∂
Ψ∂+∂
Ψ∂zx
(5-96)
mostrando che anche la funzione ψ è armonica. Lungo una superficie equipotenziale si può scrivere che
0=∂Φ∂+
∂Φ∂=Φ dz
zdx
xd (5-97)
da cui si ottiene che
w
u−=
∂Φ∂
∂Φ∂
−=
Φ
z
xdx
dz (5-98)
Lungo una linea di corrente invece
0ψψ
ψ =∂∂+
∂∂= dz
zdx
xd (5-99)
ovvero

Interazioni fluido-solido
101
u
wψ
ψ
ψ
=
∂∂∂∂
−=
z
xdx
dz (5-100)
Da quest’ultima relazione e dalla (5-98) si ottiene l’uguaglianza
1
ψ
−
Φ
−=
dx
dz
dx
dz (5-101)
che mostra che le due famiglie di curve presentano coefficienti angolari l’uno antireciproco dell’altro e quindi esse risultano tra loro ortogonali, a ulteriore conferma di quanto dimostrato precedentemente.
Nel caso di moto piano (x, z), pertanto, il campo di moto a potenziale può essere rappresentato tramite un reticolo idrodinamico (Figura 5-10), costituito da due famiglie di linee tra di esse ortogonali: linee equipotenziali e linee di corrente (inviluppo del vettore velocità).
Figura 5-10
L’incremento di ψ da una linea all’altra corrisponde alla portata che defluisce (per unità di profondità) nel tubo di flusso compreso tra le suddette curve, risultando
dqdndnn
dnn
dss
d ==∂∂=
∂∂+
∂∂= v
ψψψψ
r (5-102)
avendo indicato con s la direzione tangente alla linea di corrente e con n la direzione normale. Il campo di moto compreso tra due linee di corrente individua quindi un tubo di flusso ed esiste una relazione tra l’avvicinamento e l’allontanamento delle linee di corrente. Poiché in un tubo di flusso, individuato
Dispense di Idraulica 102
da due linee di corrente, passa una portata elementare dq che è costante lungo il percorso, se le linee di corrente si allontanano, per l’aumento della sezione trasversale, non può che verificarsi una diminuzione della velocità. Il contrario avviene ovviamente se esse si avvicinano. Per tal motivo è conveniente costruire il reticolo idrodinamico in maniera che la differenza tra i valori della funzione di corrente per ogni coppia di linee successive sia costante ottenendo così una portata defluente tra di esse sempre costante. Analogamente risulta utile tracciare le isopotenziali in modo che la differenza di potenziale sia costante passando da una isopotenziale all’altra: la maggiore o minore distanza tra le isopotenziali indicherà quindi un minore o maggiore valore di velocità.
Come accennato precedentemente se il moto è a potenziale è possibile applicare il metodo delle singolarità idrodinamiche sovrapponendo soluzioni semplici al fine di ottenerne più complesse. E’ bene pertanto descrivere alcuni moti a potenziale fondamentali (nell’ipotesi di moto piano), per i quali è facile verificare l’armonicità della funzione potenziale, come il moto uniforme traslatorio, il punto sorgente/pozzo, il vortice irrotazionale. Successivamente verranno mostrati alcuni esempi di sovrapposizioni di due o più moti a potenziale.
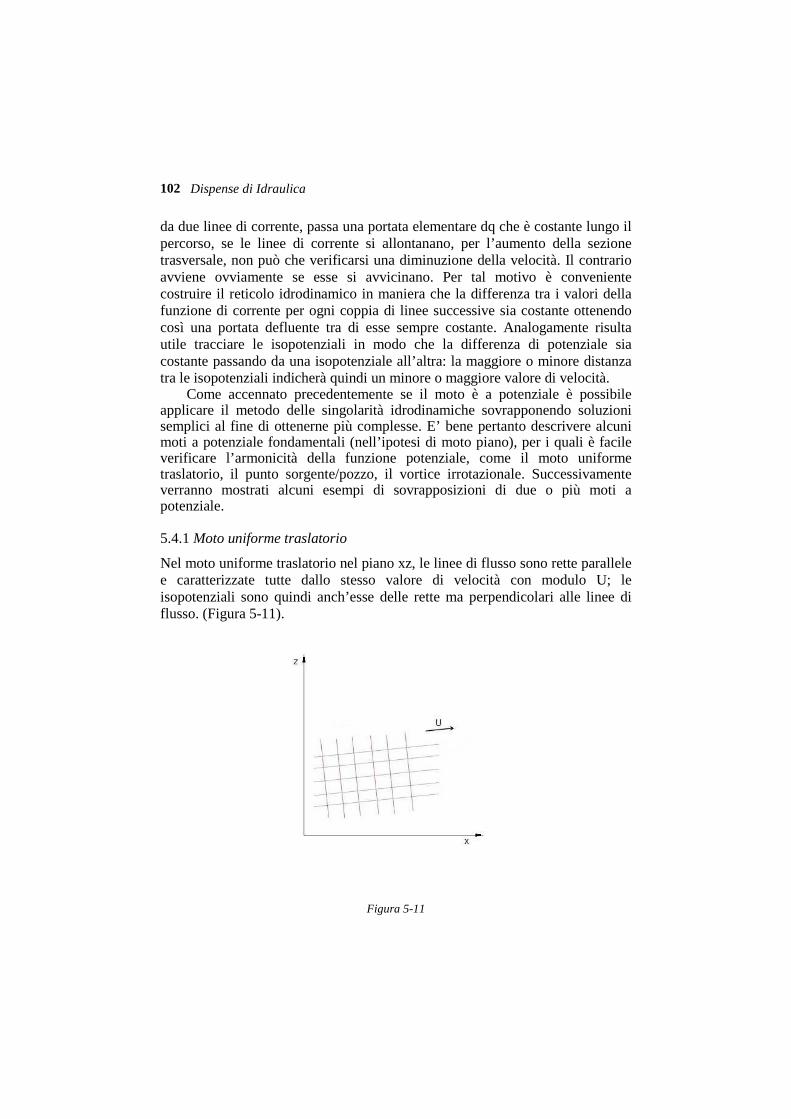
5.4.1 Moto uniforme traslatorio
Nel moto uniforme traslatorio nel piano xz, le linee di flusso sono rette parallele e caratterizzate tutte dallo stesso valore di velocità con modulo U; le isopotenziali sono quindi anch’esse delle rette ma perpendicolari alle linee di flusso. (Figura 5-11).
Figura 5-11
Interazioni fluido-solido
103
Indicato con α l’angolo tra la velocità e l’asse x, la velocità avrà componenti
==
αα
senw
cosu
U
U (5-103)
Il potenziale dovrà quindi soddisfare le equazioni
=∂Φ∂
=∂Φ∂
α
α
sen
cos
Uz
Ux
(5-104)
ottenendo pertanto dalla prima, tramite integrazione,
( )zUx CΦ+=Φ αcos (5-105)
dove ΦC è una funzione scalare funzione della sola z. Sostituendo l’espressione ricavata nella seconda delle (5-103) e integrando, si ottiene
( )αα sencos zxU +=Φ (5-106)
In modo analogo dalle relazioni di Cauchy, si ottiene la funzione di corrente pari
( )ααψ cossen zxU +−= (5-107)
presentandosi quindi ortogonale alle equipotenziali. L’esempio del moto uniforme traslatorio fornisce una prova del fatto che
affinchè un moto sia a potenziale, non è strettamente necessario che la viscosità del fluido sia nulla. La viscosità del fluido determina infatti l’insorgenza di vorticità nel moto solo tramite l’azione di un gradiente di velocità. Alcuni teoremi (Lagrange, Kelvin) garantiscono che un moto incomprimibile, se inizialmente irrotazionale, permane in tale condizione indipendentemente dall’essere viscoso o meno, e la vorticità non può essere generata per cause interne al campo di moto, ma solo per interazione tramite la frontiera (per esempio per la presenza di un ostacolo).
5.4.2 Punto sorgente/pozzo piano
Un moto piano caratterizzato da una portata costante (per unità di profondità) λ (uscente, nel caso di una sorgente, o entrante, nel caso di un pozzo) da un asse perpendicolare a un piano xz e passante per l’origine, presenta un vettore velocità diretto sempre radialmente (Figura 5-12).

Dispense di Idraulica 104
Figura 5-12
Tale moto presenta un modulo della velocità funzione della distanza r del generico punto dall’origine, pari a
rπλ
2v =r
(5-108)
Il vettore velocità presenta quindi componenti pari a
+=
∂Φ∂=
+=
∂Φ∂=
22
22
2w
2u
zx
z
z
zx
x
x
πλπλ
(5-109)
che integrate forniscono una funzione potenziale pari a
22log2
zx +=Φπλ
(5-110)
La costante λ viene anche denominata intensità della sorgente o del pozzo. Nel caso di una sorgente essa assume valore positivo mentre in quello del pozzo assume valore negativo. La funzione di corrente è invece pari a
x
zarctg
2πλψ = (5-111)
Chiaramente l’origine rappresenta una singolarità essendo in essa infinita la velocità. Le isopotenziali sono delle circonferenze con centro nell’origine degli assi mentre le linee di flusso sono delle rette uscenti dall’origine.

Interazioni fluido-solido
105
5.4.3 Vortice irrotazionale o vortice libero
Il vortice irrotazionale è uno schema di flusso molto utile che può essere facilmente ottenuto dallo schema di sorgente, invertendo la funzione del potenziale con quella di corrente (Figura 5-13) e cioè
x
zarctg
2πΓ=Φ (5-112)
con Γ costante detta intensità del vortice. La funzione di corrente è invece
22log2
zx +Γ=π
ψ (5-113)
permettendo di ottenere il campo di velocità pari a
+Γ=
+
Γ=∂Φ∂=
+Γ−=
+
Γ−=∂Φ∂=
222
2222
21
11
2w
21
1
2u
zx
x
x
zxz
zx
z
x
zx
z
x
ππ
ππ
(5-114)
Figura 5-13
L’origine degli assi rappresenta ancora una singolarità essendo anche qui infinita la velocità. Le isopotenziali sono quindi delle rette uscenti dall’origine

Dispense di Idraulica 106
mentre e le linee di flusso sono circonferenze con centro nell’origine degli assi. La costante Γ assume valore positivo se il flusso è antiorario intorno all’origine o valore negativo se orario. Il modulo della velocità risulta ancora pari a
rzx
x
zx
z
πππ 222wuv
2
22
2
2222 Γ
=
+Γ+
+Γ−=+=r
(5-115)
con r la distanza del generico punto dall’origine. Tale risultato mostra che il vortice irrotazionale si presenta con caratteristiche simili a quelle di un vortice reale solo a grande distanza dall’asse di rotazione.
5.4.4 Semicorpo
Sovrapponendo gli effetti di un moto uniforme traslatorio parallelo all’asse x, a quelli di un punto sorgente posto nell’origine degli assi, tramite la somma della (5-106) e della (5-110), si ottiene il potenziale pari a:
Uxzx ++=Φ 22log2πλ
(5-116)
al quale corrispondono le linee di corrente di Figura 5-14, e una funzione di corrente pari a
Uzx
z += arctg2πλψ (5-117)
Figura 5-14
Esiste un punto posto sull’asse x, denominato punto di ristagno, in cui la velocità presenta valore nullo. Per la simmetria del flusso, in tale punto la componente su z della velocità è banalmente nulla, pertanto per determinare la posizione del punto di ristagno è necessario determinare la componente su x della velocità come
Interazioni fluido-solido
107
( ) Uzx
x
x+
+=
∂Φ∂
222πλ
(5-118)
che uguagliata a zero nel punto di ristagno di coordinate (x0, 0) si scrive
02 0
=+Uxπ
λ (5-119)
fornendo la posizione
Ux
20 πλ−= (5-120)
L’interesse di tale schema deriva dal fatto che a partire dal punto di ristagno si determina una superficie di frontiera che separa una zona all’interno della quale ricadono le linee di corrente derivanti dal moto traslatorio da quella dove ricadono le linee di corrente che prendono origine dal punto sorgente: tale frontiera viene denominata semicorpo (curva in grassetto in Figura 5-14) e può essere interpretata come la prua di un corpo investito da un moto uniforme.
5.4.5 Coppia sorgente-pozzo
Si consideri un moto piano causato dalla sovrapposizione di un punto sorgente e di un pozzo di pari intensità e posti a una distanza d. Assunto come sistema di riferimento l’asse x passante per i due punti e l’asse z perpendicolare con origine nel punto medio di essi, la funzione potenziale per il principio di sovrapposizione di effetti si può scrivere come
+
−−+
+=Φ 22
22
2log
2log
2z
dxz
dx
πλ
(5-121)
ovvero
22
22
2
2log
4z
dx
zd
x
+
−
+
+=Φ
πλ
(5-122)
mentre la funzione di corrente è pari a
Dispense di Idraulica 108
−−
+=
2
arctg
2
arctg2 d
x
zd
x
z
πλψ (5-123)
Figura 5-15
Le linee equipotenziali (curve continue) e le linee di corrente (curve tratteggiate) che si ottengono in questo caso sono mostrate in Figura 5-15.
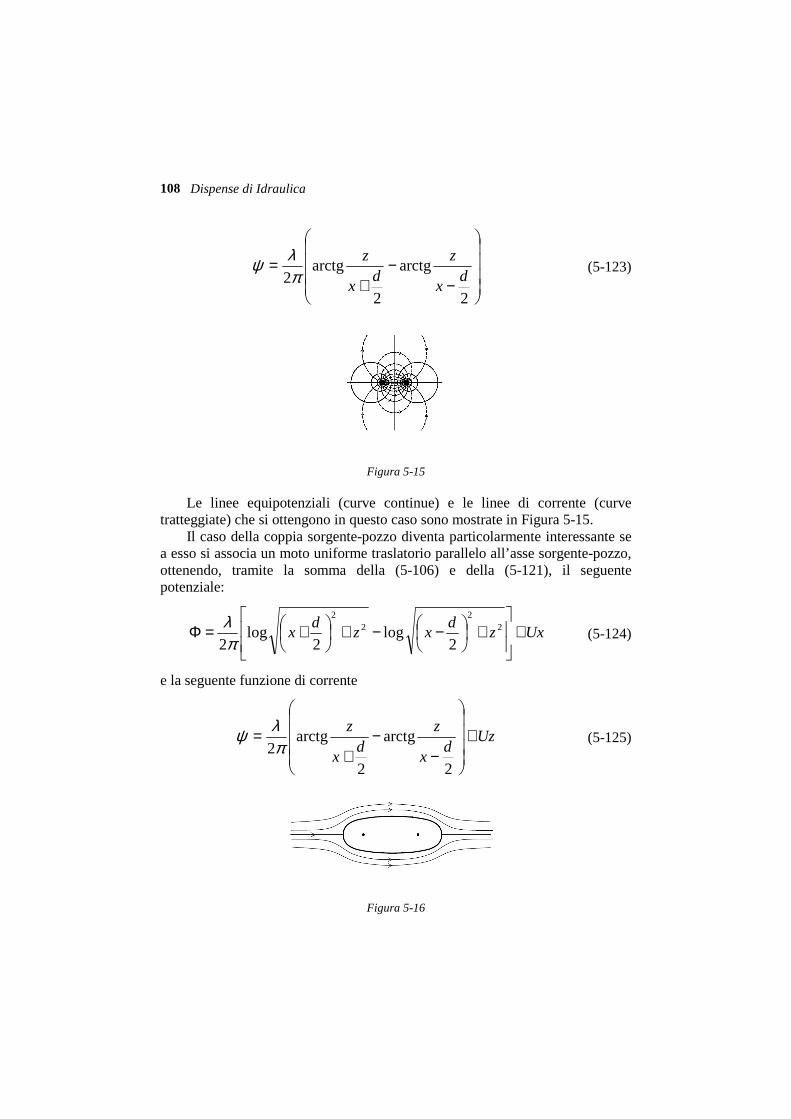
Il caso della coppia sorgente-pozzo diventa particolarmente interessante se a esso si associa un moto uniforme traslatorio parallelo all’asse sorgente-pozzo, ottenendo, tramite la somma della (5-106) e della (5-121), il seguente potenziale:
Uxzd
xzd
x +
+
−−+
+=Φ 22
22
2log
2log
2πλ
(5-124)
e la seguente funzione di corrente
Uzd
x
zd
x
z +
−−
+=
2
arctg
2
arctg2πλψ (5-125)
Figura 5-16

Interazioni fluido-solido
109
Al valore ψ=0 corrisponde una linea di corrente chiusa (in grassetto, Figura 5-16) di forma ellittica che al diminuire della distanza d tende a diventare una circonferenza di raggio via via più piccolo. Tale curva chiusa racchiude il campo di moto non interessato dalle linee di corrente provenienti dal moto uniforme e viene quindi a costituire una superficie materializzabile denominata corpo chiuso o ovale di Rankine1. Il punto a prua del corpo chiuso è un punto di ristagno la cui posizione può essere determinata in modo analogo a quanto fatto nel caso di punto sorgente associato a un moto uniforme traslatorio.
5.4.6 Dipolo di punti sorgente/pozzo e di vortici
Considerando una coppia sorgente-pozzo, si osserva che facendo tendere a zero la distanza d e mantenendo il prodotto λd costante2, si ottiene il cosiddetto dipolo3 (o doppietta) la cui funzione potenziale è, tramite la (5-121), pari a
d
zd
xzd
xd
d
+
−−+
+
=Φ→
22
22
0
2log
2log
lim2πλ
(5-126)
ovvero
( )22
22
2
log
2 zx
xd
x
zxd
+=
∂+∂=Φ
πλ
πλ
(5-127)
Ragionando in modo analogo si ottiene che la funzione di corrente del dipolo è
222arctg
2 zx
zd
x
z
x
d
+−=
∂∂=
πλ
πλψ (5-128)
1 Ingegnere e fisico del secolo ‘800. 2 E’ necessario mantenere tale prodotto costante per evitare che le linee chiuse si
riducano a dei punti. 3 Nel caso in esame il dipolo presenta un asse coincidente con l’asse x.

Dispense di Idraulica 110
Figura 5-17
In questo caso le linee di corrente (continue) e le isopotenziali sono mostrate in Figura 5-17.
Volendo considerare un dipolo di vortici con uguale e opposto valore di intensità, si ottiene come funzione potenziale
222 zx
zd
+−=Φ
πλ
(5-129)
e come funzione di corrente
222 zx
xd
+=
πλψ (5-130)
Appare quindi chiara l’equivalenza tra un dipolo di punti sorgente e uno di vortici con assi ruotati di 90°.
5.4.7 Corrente euleriana
Sovrapponendo al dipolo un moto uniforme traslatorio parallelo all’asse del dipolo si ottiene la cosiddetta corrente euleriana caratterizzata da
Uxzx
xd ++
=Φ222π
λ (5-131)
e
Uzzx
zd ++
−=222π
λψ (5-132)
Interazioni fluido-solido
111
Figura 5-18
La componente su x della velocità risulta quindi pari a
( ) Uzx
xzd
x
Uxzx
xd
++
−=∂
++
∂=
222
2222
22
uπ
λπλ
(5-133)
mentre quella su z vale
( )222
22 2
22
wzx
zxd
z
Uxzx
xd
+−=
∂
++
∂=
πλπ
λ
(5-134)
E’ interessante notare che i vettori velocità presentano simmetria solo rispetto all’asse x, mentre i moduli della velocità sono simmetrici sia rispetto all’asse x sia rispetto all’asse z.
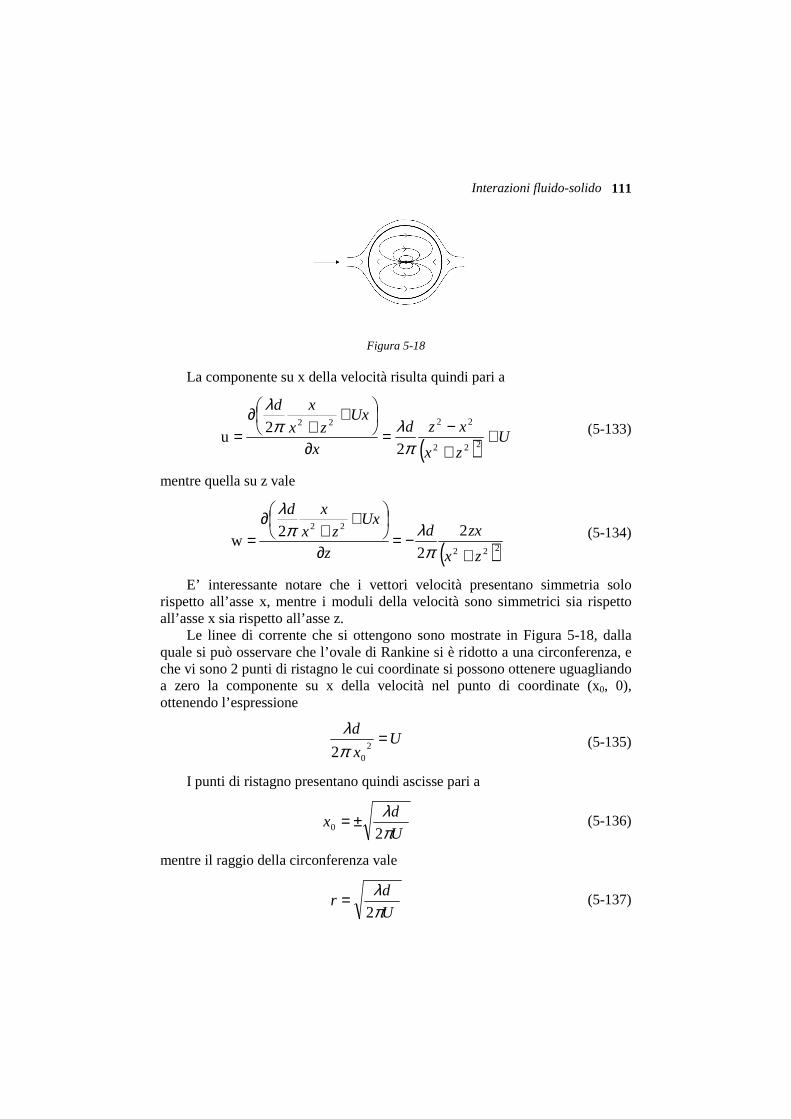
Le linee di corrente che si ottengono sono mostrate in Figura 5-18, dalla quale si può osservare che l’ovale di Rankine si è ridotto a una circonferenza, e che vi sono 2 punti di ristagno le cui coordinate si possono ottenere uguagliando a zero la componente su x della velocità nel punto di coordinate (x0, 0), ottenendo l’espressione
Ux
d =2
0 2πλ
(5-135)
I punti di ristagno presentano quindi ascisse pari a
20 U
dx
πλ±= (5-136)
mentre il raggio della circonferenza vale
2 U
dr
πλ= (5-137)
Dispense di Idraulica 112
Questo campo di moto è quindi quello che si avrebbe nel caso di flusso attorno a un cilindro (per esempio il pilone di un ponte o di una piattaforma petrolifera) posto all’interno di una corrente uniforme.
Figura 5-19
Per ottenere la distribuzione di velocità in corrispondenza dell’asse z (x=0), tramite la (5-133), si può scrivere
Uz
dx +== 20 2
uπλ
(5-138)
mostrando un andamento parabolico (Figura 5-19) che sulla circonferenza (z=r) assume valore pari a
UUr
d2
2u
2rz 0,x =+=== πλ
(5-139)
5.4.8 Corrente traslocircolatoria
Sovrapponendo una corrente euleriana a un vortice orario con centro coincidente con quello del dipolo si ottiene la cosiddetta corrente traslocircolatoria o cilindro rotante caratterizzata da
x
zUx
zx
xdarctg
22 22 ππλ Γ−+
+=Φ (5-140)
e
2222
log22
zxUzzx
zd +Γ−++
−=ππ
λψ (5-141)
Interazioni fluido-solido
113
Figura 5-20
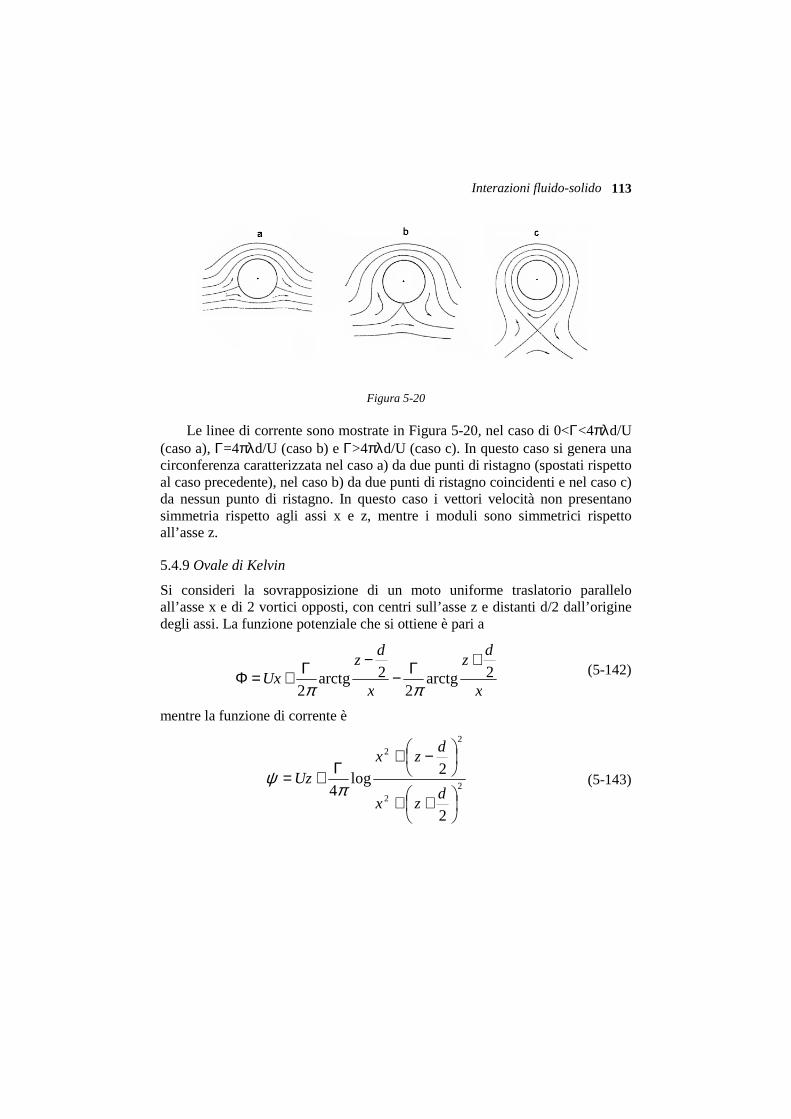
Le linee di corrente sono mostrate in Figura 5-20, nel caso di 0<Γ<4πλd/U (caso a), Γ=4πλd/U (caso b) e Γ>4πλd/U (caso c). In questo caso si genera una circonferenza caratterizzata nel caso a) da due punti di ristagno (spostati rispetto al caso precedente), nel caso b) da due punti di ristagno coincidenti e nel caso c) da nessun punto di ristagno. In questo caso i vettori velocità non presentano simmetria rispetto agli assi x e z, mentre i moduli sono simmetrici rispetto all’asse z.
5.4.9 Ovale di Kelvin
Si consideri la sovrapposizione di un moto uniforme traslatorio parallelo all’asse x e di 2 vortici opposti, con centri sull’asse z e distanti d/2 dall’origine degli assi. La funzione potenziale che si ottiene è pari a
x
dz
x
dz
Ux 2arctg2
2arctg2
+Γ−−Γ+=Φ
ππ
(5-142)
mentre la funzione di corrente è
22
22
2
2log
4
++
−+Γ+=
dzx
dzx
Uzπ
ψ (5-143)
Dispense di Idraulica 114
Figura 5-21
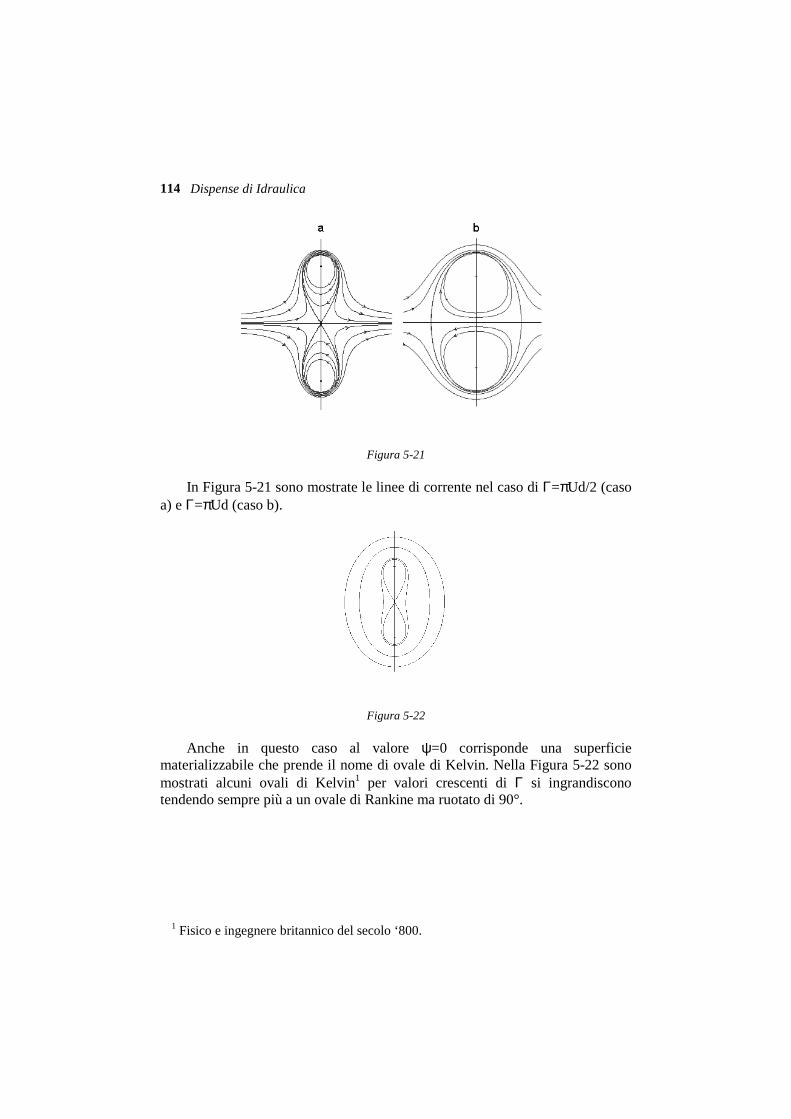
In Figura 5-21 sono mostrate le linee di corrente nel caso di Γ=πUd/2 (caso a) e Γ=πUd (caso b).
Figura 5-22
Anche in questo caso al valore ψ=0 corrisponde una superficie materializzabile che prende il nome di ovale di Kelvin. Nella Figura 5-22 sono mostrati alcuni ovali di Kelvin1 per valori crescenti di Γ si ingrandiscono tendendo sempre più a un ovale di Rankine ma ruotato di 90°.
1 Fisico e ingegnere britannico del secolo ‘800.

Interazioni fluido-solido
115
5.5. Resistenza idrodinamica e portanza
Una volta risolte le equazioni di Navier-Stokes, alle quali va sempre associata l’equazione di continuità, è possibile ottenere l’azione del fluido sulla superficie di frontiera A del corpo, denominata forza idrodinamica e pari a
∫∫ +=A nA
dAdAnpR τrr
ˆ (5-144)
che può essere scomposta in una forza Rz, denominata portanza o lift, ortogonale alla direzione della velocità relativa tra corrente e corpo, e una parallela Rx, denominata resistenza idrodinamica o drag. Quest’ultima, a sua volta, si divide in resistenza di forma (pressure drag) e resistenza di attrito (friction drag). La prima nasce per effetto delle pressioni agenti sulla superficie del corpo mentre la seconda per effetto degli sforzi tangenziali.
La resistenza idrodinamica Rx tra un corpo di dimensione caratteristica L e una corrente uniforme a velocità relativa pari a U, è funzione delle caratteristiche del fluido, della U e di un’opportuna sezione A* del corpo. Si può quindi scrivere
( )µρ ,*,, UARR xx = (5-145)
e cioè
iiii d
i
cbaix UAfR µρ∑= * (5-146)
con fi costante adimensionale che compare nell’i-esimo addendo. Per l’omogeneità dimensionale si ha
( )ii
i
i dcb
a
LT
M
T
LL
L
M
T
ML
= 232
(5-147)
Si ottiene quindi il sistema
i
ii
iii
ii
d
dc
cba
da
−
−−=−++−=
=+
2
231
1 (5-148)
le cui soluzioni, in funzione dell’esponente di sono pari a
−=
−=
−=
ii
ii
ii
dc
db
da
22
21
(5-149)

Dispense di Idraulica 116
e quindi
iii
i d
i
dd
dix VAfR −−−−∑= µρ 2211 * (5-150)
Mettendo in evidenza tra tutti i termini le potenze con esponente costante, si ottiene
∑ −−−−=i
ddd
dix
iii
i UAfVAR µρρ 22 ** (5-151)
che può scriversi
( ) 22 *ReRe* VAffVAR Li
dLix
i ρρ == ∑ − (5-152)
nella quale quindi f è una funzione del numero di Reynolds. Definendo un coefficiente di resistenza idrodinamica Cx pari
( )Lx fC Re2= (5-153)
la resistenza idrodinamica si scrive
2*
2UACR xx ρ= (5-154)
Nell’ipotesi di effetti viscosi trascurabili, la (5-144) diventa
∫=A
dAnpR ˆr
(5-155)
necessitando quindi la conoscenza della distribuzione della pressione sulla superficie A. Nell’ipotesi di fluido incomprimibile, moto irrotazionale e differenza di quota geodetica trascurabile, se il corpo è un cilindro con asse ortogonale alla corrente uniforme, note le componenti di velocità sulla superficie circolare materializzata, è possibile valutare il modulo della velocità v, e quindi la pressione p in ogni punto della superficie stessa. Applicando Bernoulli tra un punto noto all’infinito (caratterizzato da una pressione p0 e una velocità uniforme U) a monte ed il punto di interesse, ottenendo
220 v2
1U
2
1 r
g
p
g
p+=+
γγ (5-156)
da cui si ricava immediatamente l’eccesso di pressione rispetto al valore di pressione all’infinito
Interazioni fluido-solido
117
220 v2
1U
2
1 r
gg
pp −=−γγ
(5-157)
Figura 5-23
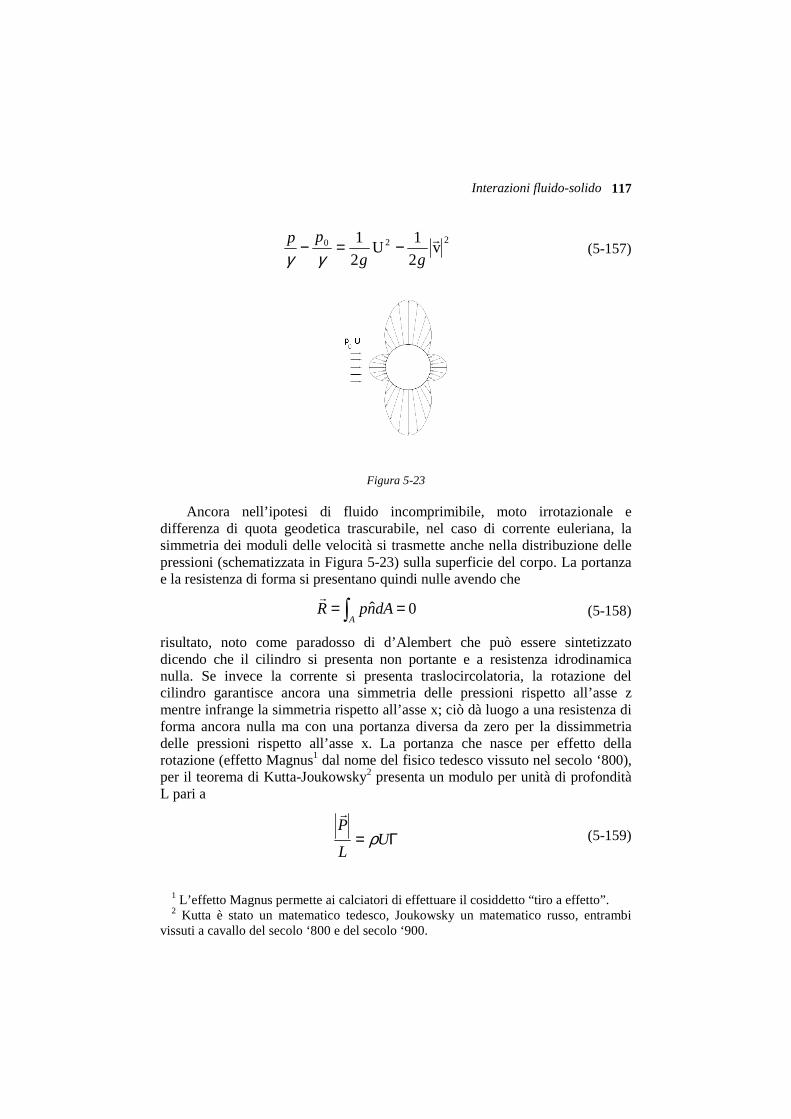
Ancora nell’ipotesi di fluido incomprimibile, moto irrotazionale e differenza di quota geodetica trascurabile, nel caso di corrente euleriana, la simmetria dei moduli delle velocità si trasmette anche nella distribuzione delle pressioni (schematizzata in Figura 5-23) sulla superficie del corpo. La portanza e la resistenza di forma si presentano quindi nulle avendo che
0ˆ == ∫A dAnpRr
(5-158)
risultato, noto come paradosso di d’Alembert che può essere sintetizzato dicendo che il cilindro si presenta non portante e a resistenza idrodinamica nulla. Se invece la corrente si presenta traslocircolatoria, la rotazione del cilindro garantisce ancora una simmetria delle pressioni rispetto all’asse z mentre infrange la simmetria rispetto all’asse x; ciò dà luogo a una resistenza di forma ancora nulla ma con una portanza diversa da zero per la dissimmetria delle pressioni rispetto all’asse x. La portanza che nasce per effetto della rotazione (effetto Magnus1 dal nome del fisico tedesco vissuto nel secolo ‘800), per il teorema di Kutta-Joukowsky2 presenta un modulo per unità di profondità L pari a
Γ= UL
Pρ
r
(5-159)
1 L’effetto Magnus permette ai calciatori di effettuare il cosiddetto “tiro a effetto”. 2 Kutta è stato un matematico tedesco, Joukowsky un matematico russo, entrambi
vissuti a cavallo del secolo ‘800 e del secolo ‘900.
Dispense di Idraulica 118
Nel caso di un corpo affusolato caratterizzato da simmetria assiale, il campo di moto irrotazionale circostante può essere rappresentato utilizzando un numero elevato di coppie sorgente-pozzo distribuite opportunamente sull’asse del corpo in modo da ottenere, con le sorgenti, un flusso divergente a prua che poi converge a poppa per la presenza dei pozzi. Geometrie più complicate hanno necessità di sovrapposizioni di pozzi, sorgenti e vortici.
5.6. Soluzioni semplificate delle equazioni di Navier-Stokes
Per determinare completamente la natura del flusso di un liquido Newtoniano attorno a un corpo è necessario in generale risolvere le equazioni (2-61) di Navier Stokes che, se il fluido è incomprimibile, si presentano nella forma
( ) vgrad 2rrr
∇−=− µρ pAF (5-160)
Scelta una lunghezza caratteristica L del corpo immerso e denominata U la velocità relativa con il fluido circostante, è possibile definire una grandezza adimensionale, denominata numero di Reynolds ReL, pari a
µρUL
L =Re (5-161)
Tale numero, come verrà mostrato meglio nel capitolo 6, rappresenta il rapporto tra le forze legate all’inerzia e quelle legate alla viscosità. Nel caso di numeri di Reynolds tendenti a zero (creeping flow), nell’ipotesi di fluido incomprimibile e campo gravitazionale, le equazioni di Navier Stokes si riducono a
( ) vgrad 2r∇=+ µγzp (5-162)
La stessa relazione si ottiene se invece di considerare un creeping flow si considera un moto stazionario laminare con velocità costante nella direzione del moto. In tali casi, e se la geometria si presenta semplice, si possono ottenere delle soluzioni esatte, in forma chiusa.
Per alti numeri di Reynolds sono invece i termini viscosi a essere trascurabili e le equazioni di Navier Stokes si riducono all’equazione di Eulero
( ) pAF grad=−rr
ρ (5-163)
Nei sottoparagrafi successivi vengono descritti dei casi in cui è possibile ottenere la soluzione in forma esatta delle equazioni di Navier-Stokes: pur essendo delle situazioni estremamente banali e molto spesso di scarsa utilità pratica, esse rappresentano da un punta di vista concettuale un importante punto di partenza.

Interazioni fluido-solido
119
5.6.1 Moto di Couette e di Poiseuille
Si consideri un fluido incomprimibile posto tra un piano indefinito inferiore fermo e un piano indefinito superiore a distanza B che si muove a velocità costante U parallelamente alla parete inferiore. Scelto l’asse x nella direzione di U e l’asse y ortogonale alle pareti e con origine sul piano fermo, l’equazione vettoriale (5-160) proiettata su x e scritta nell’ipotesi di moto laminare e stazionario, si riduce alla seguente equazione scalare, nell’incognita velocità locale u del fluido
( )2
2u
dy
d
dx
zpd µγ =+ (5-164)
alla quale vanno associate le condizioni al contorno u=0 per y=0 e u=U per y=B. Integrando rispetto a y una prima volta, si ottiene
( )1
uc
dy
dy
dx
zpd +=+ µγ (5-165)
e poi una seconda volta
( )21
2
u 2
cycy
dx
zpd ++=+ µγ (5-166)
avendo supposto la costanza della quota piezometrica su y. Tramite l’utilizzo delle condizioni al contorno si ottiene
( ) ( )
−+−=B
y
B
y
dx
zpdBU
B
yy 1
2u
2 γµ
(5-167)
il cui valore medio è pari a
( ) ( ) ( )dx
zpdBUd
dx
zpdBUmedio
γµ
ςςςγµ
ς +−=
−+−= ∫ 122
12
u21
0
2
(5-168)
avendo posto ζ=y/B In assenza di gradiente di quota piezometrica e di movimento della parete
superiore (U=0), la velocità risulta chiaramente nulla in tutto il dominio. In assenza di gradiente di quota piezometrica ma con parete superiore in movimento, la velocità è distribuita come
( ) UB
yy =u (5-169)
Dispense di Idraulica 120
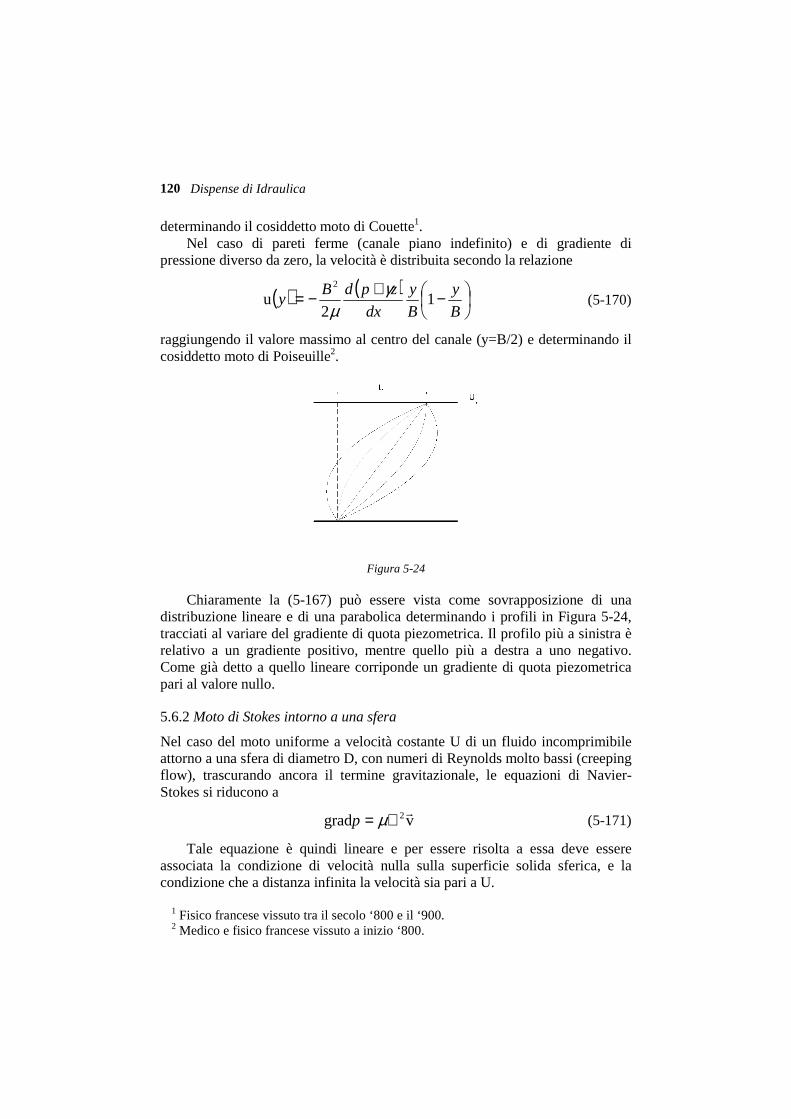
determinando il cosiddetto moto di Couette1. Nel caso di pareti ferme (canale piano indefinito) e di gradiente di
pressione diverso da zero, la velocità è distribuita secondo la relazione
( ) ( )
−+−=B
y
B
y
dx
zpdBy 1
2u
2 γµ
(5-170)
raggiungendo il valore massimo al centro del canale (y=B/2) e determinando il cosiddetto moto di Poiseuille2.
Figura 5-24
Chiaramente la (5-167) può essere vista come sovrapposizione di una distribuzione lineare e di una parabolica determinando i profili in Figura 5-24, tracciati al variare del gradiente di quota piezometrica. Il profilo più a sinistra è relativo a un gradiente positivo, mentre quello più a destra a uno negativo. Come già detto a quello lineare corriponde un gradiente di quota piezometrica pari al valore nullo.
5.6.2 Moto di Stokes intorno a una sfera
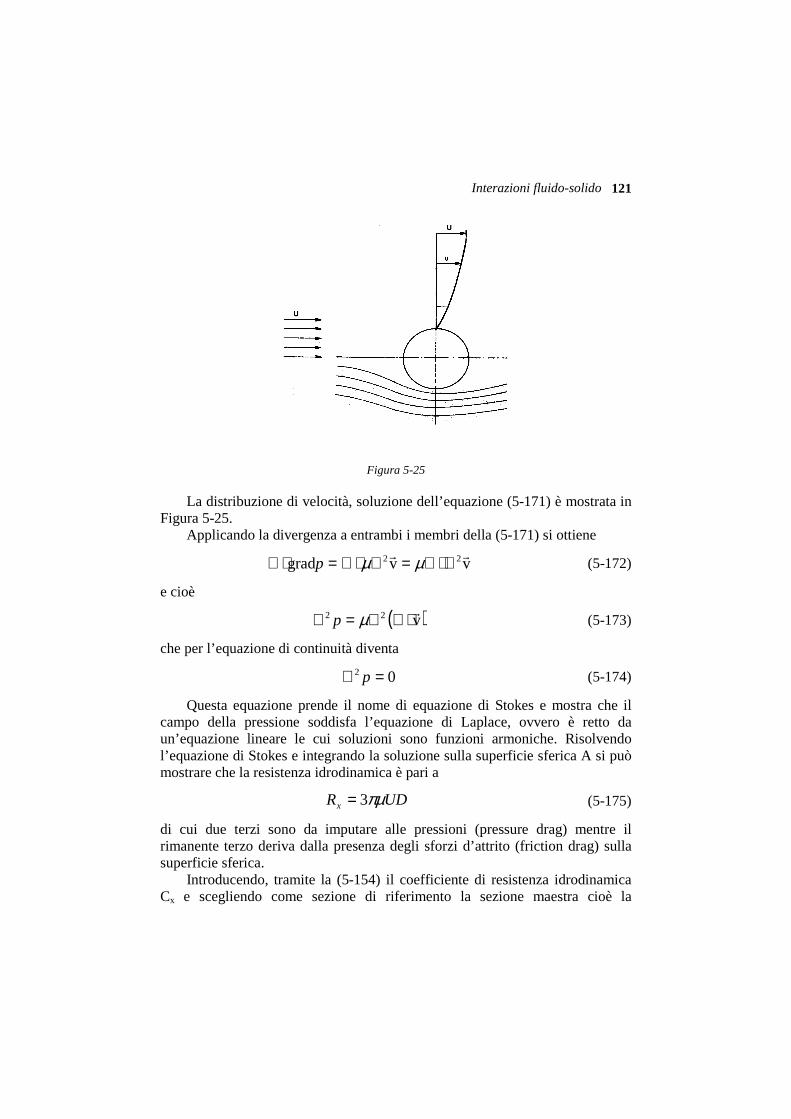
Nel caso del moto uniforme a velocità costante U di un fluido incomprimibile attorno a una sfera di diametro D, con numeri di Reynolds molto bassi (creeping flow), trascurando ancora il termine gravitazionale, le equazioni di Navier-Stokes si riducono a
vgrad 2r∇= µp (5-171)
Tale equazione è quindi lineare e per essere risolta a essa deve essere associata la condizione di velocità nulla sulla superficie solida sferica, e la condizione che a distanza infinita la velocità sia pari a U.
1 Fisico francese vissuto tra il secolo ‘800 e il ‘900. 2 Medico e fisico francese vissuto a inizio ‘800.
Interazioni fluido-solido
121
Figura 5-25
La distribuzione di velocità, soluzione dell’equazione (5-171) è mostrata in Figura 5-25.
Applicando la divergenza a entrambi i membri della (5-171) si ottiene
vvgrad 22 rr ∇⋅∇=∇⋅∇=⋅∇ µµp (5-172)
e cioè
( )v22 r⋅∇∇=∇ µp (5-173)
che per l’equazione di continuità diventa
02 =∇ p (5-174)
Questa equazione prende il nome di equazione di Stokes e mostra che il campo della pressione soddisfa l’equazione di Laplace, ovvero è retto da un’equazione lineare le cui soluzioni sono funzioni armoniche. Risolvendo l’equazione di Stokes e integrando la soluzione sulla superficie sferica A si può mostrare che la resistenza idrodinamica è pari a
UDRx πµ3= (5-175)
di cui due terzi sono da imputare alle pressioni (pressure drag) mentre il rimanente terzo deriva dalla presenza degli sforzi d’attrito (friction drag) sulla superficie sferica.
Introducendo, tramite la (5-154) il coefficiente di resistenza idrodinamica Cx e scegliendo come sezione di riferimento la sezione maestra cioè la
Dispense di Idraulica 122
proiezione del corpo su di un piano ortogonale alla direzione del moto relativo, la (5-175) diventa
Dx UD
CRe
2424 ==
µρ
(5-176)
5.7. Strato limite
Nello studio dell’interazione fluido-solido, si è soliti distinguere il “moto interno” dal “moto esterno”. Il primo riguarda le correnti defluenti in tubi o canali e riguarda l’interazione tra la corrente stessa e le pareti solide circostanti. Il moto esterno è invece quello che si osserva quando una corrente di un fluido investe un corpo. Nel presente paragrafo si farà riferimento esclusivamente al moto esterno con l’obiettivo quindi di studiare l’interazione tra la corrente fluida e la frontiera solida del corpo.
Grazie all’intuizione di Prandtl è possibile ritenere che le interazioni fluido–corpo si sviluppino sostanzialmente in uno strato, denominato strato limite, il cui spessore è piccolo se confrontato con le dimensioni del corpo. In tale zona i gradienti di velocità sono rilevanti e quindi il ruolo degli sforzi tangenziali è fondamentale. All’esterno dello strato limite i gradienti di velocità sono ridotti e quindi gli sforzi tangenziali viscosi sono trascurabili. In tale zona è possibile risolvere il campo di moto, cioè ottenere la cosiddetta soluzione esterna, tramite le equazioni per i flussi non viscosi (equazioni di Eulero) o tramite le equazioni dei flussi a potenziale, che presentano una natura molto più semplice di quelle di Navier Stokes1.
La determinazione della soluzione interna, viene quindi fortemente agevolata grazie alla teoria dello strato limite che prevede comunque la risoluzione delle equazioni di Navier Stokes ma in forma notevolmente semplificata per l’esiguità dello strato limite stesso. Pertanto la soluzione esterna può, in prima approssimazione, essere ottenuta separatamente dalla soluzione interna mentre quest’ultima dipende in modo non trascurabile dalle soluzioni esterne.
Si indichi con δ lo spessore dello strato limite e cioè la distanza dalla superficie entro la quale la velocità passa dal valore nullo a valori confrontabili
1 L’approccio campo esterno-strato limite cade in difetto nei creeping flow o flussi
striscianti per i quali Re è basso (essendo lo spessore dello strato limite non più trascurabile) o nel caso in cui avvenga il cosiddetto “distacco” dello strato limite che comporta la formazione di una regione di scia nella quale la vorticità non è nulla e quindi il moto non può essere ritenuto irrotazionale.
Interazioni fluido-solido
123
con il valore U che caratterizza la corrente. In questa regione le forze viscose per unità di volume hanno un ordine di grandezza pari a
=∇µ 22
vδµU
Or
(5-177)
mentre le forze di inerzia hanno ordine di grandezza pari a
=
L
UO
dt
d 2v ρρr
(5-178)
Se al confine dello strato limite le forze viscose e le forze di inerzia hanno il medesimo ordine di grandezza si deve avere:
L
UU 2
2
ρδµ ≈ (5-179)
da cui
LRe
1
=≈
LUL ρµδ
(5-180)
Questa relazione evidenzia che la regione adiacente la parete nella quale sono significative le forze viscose, cioè lo strato limite, è tanto più sottile quanto maggiore è il numero di Reynolds ReL.
Chiaramente la distinzione tra la regione a potenziale e la regione di strato limite è arbitraria. Per convenzione si definisce lo spessore δ dello strato limite come la distanza dalla parete alla quale la velocità risulta pari al 99% della velocità indisturbata dalla presenza del corpo che si raggiunge asintoticamente.
Figura 5-26

Dispense di Idraulica 124
Si consideri un sistema di coordinate curvilinee locali (Figura 5-26) con x tangente alla superficie del corpo (di lunghezza caratteristica L) nella direzione del flusso e y normale a essa.
La proiezione su x delle equazioni di Navier-Stokes, con riferimento all’interno dello strato limite, si può quindi scrivere
∂∂+
∂∂+
∂∂−=
∂∂+
∂∂+
∂∂
2
2
2
2
y
u
x
u
x
p1
y
uv
x
uu
t
u
ρµ
ρ (5-181)
Nell’ipotesi di moto stazionario e considerando che
2
2
222
2
y
u
x
u
∂∂=
<<
=∂∂
δU
OL
UO (5-182)
la (5-181) si scrive
2
2
y
u
x
p1
y
uv
x
uu
∂∂+
∂∂−=
∂∂+
∂∂
ρµ
ρ (5-183)
Nello studio dello strato limite, si ammette che, per l’esiguità dello spessore (ipotesi di Prandtl) le pressioni varino in modo trascurabile in direzione normale alla parete1. Tale ipotesi risulta accettabile se il raggio di curvatura è grande rispetto al valore dello strato limite. Una volta determinata, tramite la teoria dei moti a potenziale, la velocità U al bordo dello strato limite (parallela al corpo), l’applicazione di Bernoulli nella regione esterna, trascurando la variabilità della quota geodetica, permette di scrivere
cost2
2
=+γp
g
U (5-184)
e cioè
x
UU
x
p
∂∂=
∂∂−
ρ1
(5-185)
La (5-183), poiché la pressione all’interno dello strato limite è pari a quella della regione esterna, si può scrivere
1 Per tal motivo la risultante delle azioni di pressione sulla superficie del corpo si può
ottenere con i valori di pressione del campo di moto all’esterno determinati tramite la teoria del moto a potenziale, mentre per il calcolo degli sforzi tangenziali bisogna invece determinare il profilo di velocità nello strato limite.
Interazioni fluido-solido
125
2
2
y
u
y
uv
x
uu
∂∂+
∂∂=
∂∂+
∂∂
ρµ
x
UU (5-186)
che unita all’equazione di continuità
0y
v
x
u =∂∂+
∂∂
(5-187)
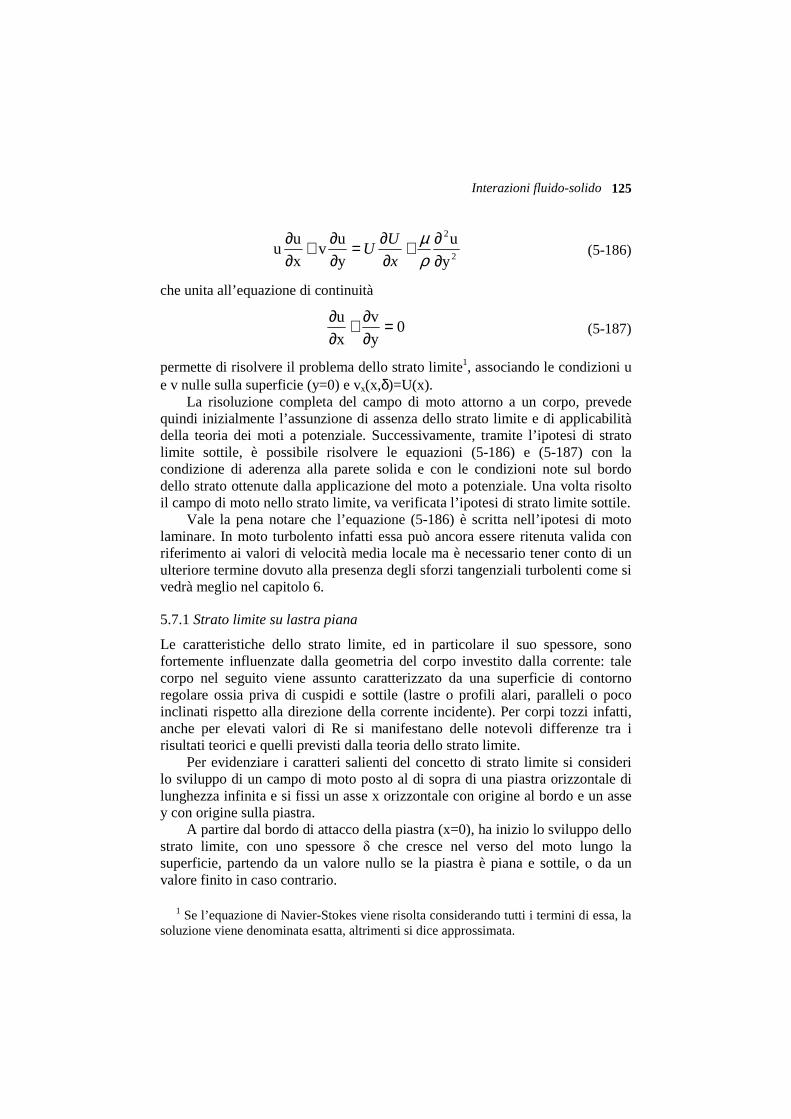
permette di risolvere il problema dello strato limite1, associando le condizioni u e v nulle sulla superficie (y=0) e vx(x,δ)=U(x).
La risoluzione completa del campo di moto attorno a un corpo, prevede quindi inizialmente l’assunzione di assenza dello strato limite e di applicabilità della teoria dei moti a potenziale. Successivamente, tramite l’ipotesi di strato limite sottile, è possibile risolvere le equazioni (5-186) e (5-187) con la condizione di aderenza alla parete solida e con le condizioni note sul bordo dello strato ottenute dalla applicazione del moto a potenziale. Una volta risolto il campo di moto nello strato limite, va verificata l’ipotesi di strato limite sottile.
Vale la pena notare che l’equazione (5-186) è scritta nell’ipotesi di moto laminare. In moto turbolento infatti essa può ancora essere ritenuta valida con riferimento ai valori di velocità media locale ma è necessario tener conto di un ulteriore termine dovuto alla presenza degli sforzi tangenziali turbolenti come si vedrà meglio nel capitolo 6.
5.7.1 Strato limite su lastra piana
Le caratteristiche dello strato limite, ed in particolare il suo spessore, sono fortemente influenzate dalla geometria del corpo investito dalla corrente: tale corpo nel seguito viene assunto caratterizzato da una superficie di contorno regolare ossia priva di cuspidi e sottile (lastre o profili alari, paralleli o poco inclinati rispetto alla direzione della corrente incidente). Per corpi tozzi infatti, anche per elevati valori di Re si manifestano delle notevoli differenze tra i risultati teorici e quelli previsti dalla teoria dello strato limite.
Per evidenziare i caratteri salienti del concetto di strato limite si consideri lo sviluppo di un campo di moto posto al di sopra di una piastra orizzontale di lunghezza infinita e si fissi un asse x orizzontale con origine al bordo e un asse y con origine sulla piastra.
A partire dal bordo di attacco della piastra (x=0), ha inizio lo sviluppo dello strato limite, con uno spessore δ che cresce nel verso del moto lungo la superficie, partendo da un valore nullo se la piastra è piana e sottile, o da un valore finito in caso contrario.
1 Se l’equazione di Navier-Stokes viene risolta considerando tutti i termini di essa, la soluzione viene denominata esatta, altrimenti si dice approssimata.
Dispense di Idraulica 126
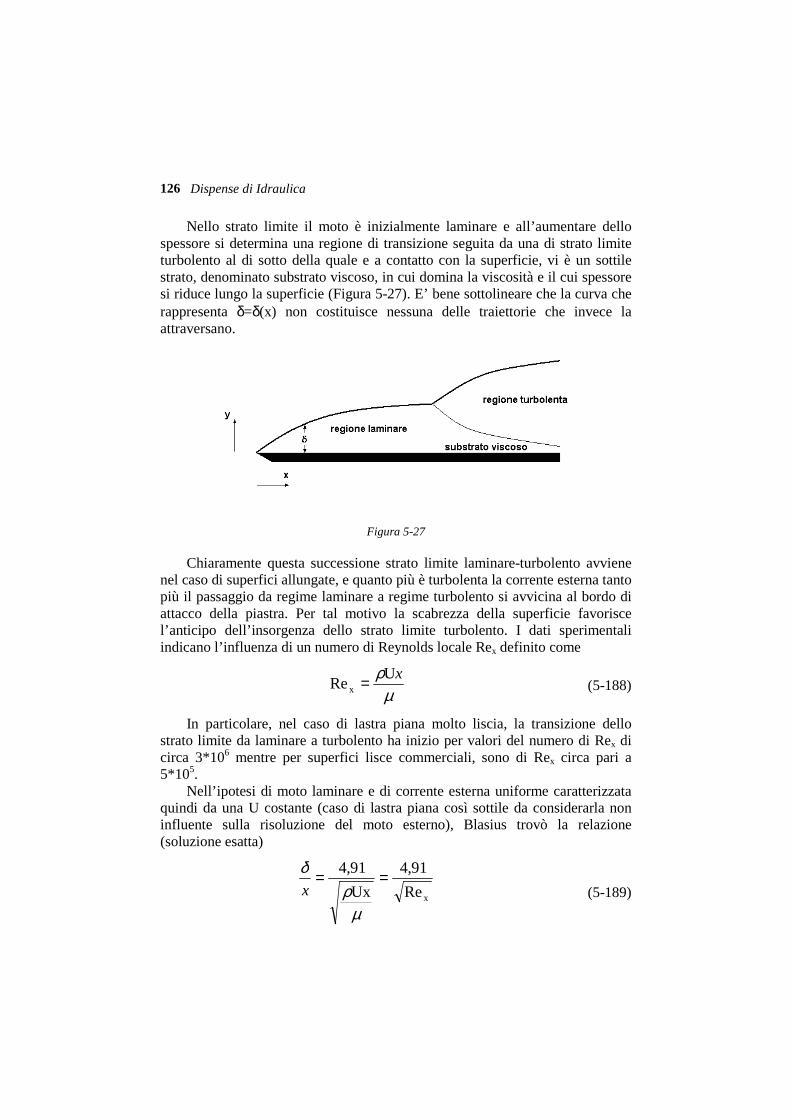
Nello strato limite il moto è inizialmente laminare e all’aumentare dello spessore si determina una regione di transizione seguita da una di strato limite turbolento al di sotto della quale e a contatto con la superficie, vi è un sottile strato, denominato substrato viscoso, in cui domina la viscosità e il cui spessore si riduce lungo la superficie (Figura 5-27). E’ bene sottolineare che la curva che rappresenta δ=δ(x) non costituisce nessuna delle traiettorie che invece la attraversano.
Figura 5-27
Chiaramente questa successione strato limite laminare-turbolento avviene nel caso di superfici allungate, e quanto più è turbolenta la corrente esterna tanto più il passaggio da regime laminare a regime turbolento si avvicina al bordo di attacco della piastra. Per tal motivo la scabrezza della superficie favorisce l’anticipo dell’insorgenza dello strato limite turbolento. I dati sperimentali indicano l’influenza di un numero di Reynolds locale Rex definito come
µρ xU
Rex = (5-188)
In particolare, nel caso di lastra piana molto liscia, la transizione dello strato limite da laminare a turbolento ha inizio per valori del numero di Rex di circa 3*106 mentre per superfici lisce commerciali, sono di Rex circa pari a 5*105.
Nell’ipotesi di moto laminare e di corrente esterna uniforme caratterizzata quindi da una U costante (caso di lastra piana così sottile da considerarla non influente sulla risoluzione del moto esterno), Blasius trovò la relazione (soluzione esatta)
xRe
91,4
Ux
91,4 ==
µρ
δx
(5-189)
Interazioni fluido-solido
127
qualitativamente simile alla (5-180) ma soprattutto in ottimo accordo con i dati sperimentali. Lo strato limite viene denominato sottile per valori di δ/x minori di 0,1. Per la (5-189), ciò accade per Rex maggiori di circa 2000 e ciò implica che per valori del numero di Reynolds inferiori a 2000 la teoria dello strato limite perde di validità.
Per avere informazioni sullo spessore dello strato limite sia in regime laminare sia in quello turbolento, risulta fondamentale l’approccio di von Kármán1 di seguito descritto.
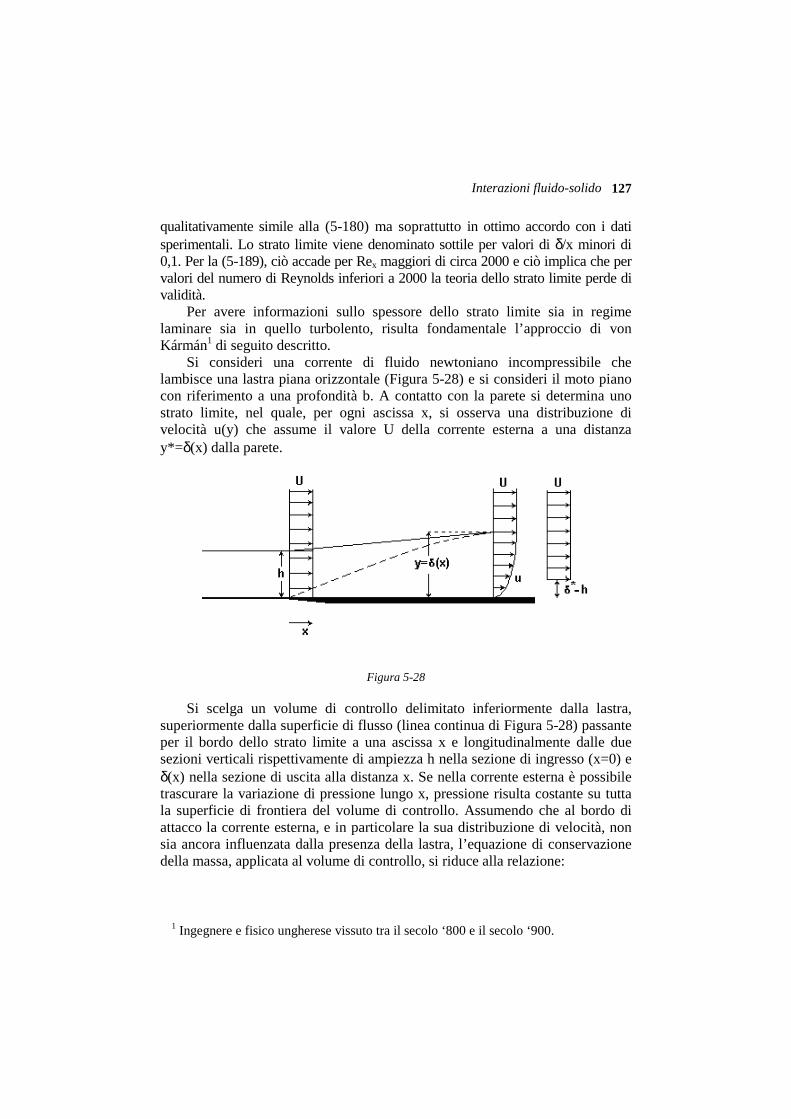
Si consideri una corrente di fluido newtoniano incompressibile che lambisce una lastra piana orizzontale (Figura 5-28) e si consideri il moto piano con riferimento a una profondità b. A contatto con la parete si determina uno strato limite, nel quale, per ogni ascissa x, si osserva una distribuzione di velocità u(y) che assume il valore U della corrente esterna a una distanza y*=δ(x) dalla parete.
Figura 5-28
Si scelga un volume di controllo delimitato inferiormente dalla lastra, superiormente dalla superficie di flusso (linea continua di Figura 5-28) passante per il bordo dello strato limite a una ascissa x e longitudinalmente dalle due sezioni verticali rispettivamente di ampiezza h nella sezione di ingresso (x=0) e δ(x) nella sezione di uscita alla distanza x. Se nella corrente esterna è possibile trascurare la variazione di pressione lungo x, pressione risulta costante su tutta la superficie di frontiera del volume di controllo. Assumendo che al bordo di attacco la corrente esterna, e in particolare la sua distribuzione di velocità, non sia ancora influenzata dalla presenza della lastra, l’equazione di conservazione della massa, applicata al volume di controllo, si riduce alla relazione:
1 Ingegnere e fisico ungherese vissuto tra il secolo ‘800 e il secolo ‘900.

Dispense di Idraulica 128
∫δ
=(x)
0 )(uhU dyybb (5-190)
nella quale h è la distanza, in direzione ortogonale alla lastra, tra la superficie di flusso in corrispondenza del bordo e la lastra. Definita la distanza δ* come
δ-hδ* = (5-191)
essa può essere interpretata come una misura della deviazione dell’andamento del flusso esterno (e quindi delle linee di corrente), per effetto della presenza dello strato limite; tale quantità viene denominata spessore di spostamento. La (5-190) quindi scriversi come:
( ) ∫δ
=−(x)
0
)(u dyyδ*δU (5-192)
da cui:
∫∫δδ
−=−=(x)
0
(x)
0
u1u
1dy
Udy
Uδ(x)δ*(x) (5-193)
Dalla (5-192) si osserva che attraverso la superficie di ampiezza (δ–δ*) defluisce con velocità U, la stessa portata per unità di profondità che passa nella sezione dello strato limite.
Si consideri ora la proiezione su x dell’equazione del bilancio della quantità di moto, applicata al volume sopra definito
0 =Π+Μ xx (5-194)
Gli sforzi tangenziali sono presenti sulla sola superficie della lastra per la trascurabilità dei gradienti di velocità sul contorno superiore del volume di controllo. Indicando con σ la superficie inferiore del volume di controllo a contatto con la lastra, per l’ipotesi fatta di pressione uniforme sull’intera superficie di contorno del volume di controllo, si ha:
∫∫ −=σ=Πσ
x
nxx dxxτb0 0
)( d φ (5-195)
Il flusso di quantità di moto è presente nelle sole sezioni piane che delimitano longitudinalmente il volume di controllo considerato. Si ha quindi:
∫δ
ρ−ρ=(x)
0
22 )(uhU dyybbM x (5-196)
Dalla (5-194) si ottiene quindi:

Interazioni fluido-solido
129
∫∫δ
−=(x)
0
22
0 0 )(u)( dyyρρhUdxxτ x
(5-197)
la quale, una volta sostituito il valore di h ottenuto dalla (5-190), diventa
( )
−= ∫∫∫
δδ (x)
0
2(x)
0 0 0 )(u)(uU dyydyyρdxxτ x
(5-198)
cioè
( ) ∫∫δ
−ρ=(x)
0
2
0 0
u1
uU dy
UUdxxτ
x
(5-199)
e quindi
( ) ∫∫δ
−=(x)
0
2
0 0
u1
udy
UUρUdxxτ
x
(5-200)
Ipotizzando che la distribuzione adimensionale della velocità, u/U, dipenda dall’ascissa x solo tramite δ(x) (ipotesi di similitudine della distribuzione di velocità), l’integrale a secondo membro diventa una funzione della sola variabile x. Introdotta allora la grandezza θ(x) definita dalla relazione:
∫δ
−=θ(x)
0
u1
u)( dy
UUx (5-201)
si ottiene
dx
dθρU(x)τ 2
0 = (5-202)
denominata equazione integrale di von Kármán della quantità di moto per lo strato limite su lastra piana, in assenza di gradiente di pressione, e valida sia nel caso di strato limite laminare che nel caso di strato limite turbolento, poiché in essa compaiono esclusivamente grandezze integrali, oltre alla velocità esterna allo strato limite, che è nota.
La grandezza θ(x) è detta spessore di quantità di moto; essa rappresenta l’ampiezza (normale alla lastra) di una sezione posta all’ascissa x attraversata con velocità U da un flusso di quantità di moto equivalente alla resistenza offerta dalla lastra, cioè uguale alla differenza tra il flusso di quantità di moto che la corrente di strato limite trasporterebbe, con la portata che le compete alla medesima ascissa se fosse animata da velocità U, e quella che effettivamente trasporta. Pertanto, lo spessore di quantità di moto è una misura della perdita di quantità di moto, rispetto a quella posseduta in condizioni indisturbate, subita da una corrente di portata

Dispense di Idraulica 130
uguale a quella che attraversa la sezione dello strato limite, per effetto della resistenza offerta dalla lastra.
L’equazione di von Kármán permette di risolvere il problema dello strato limite tramite un’equazione differenziale ordinaria e non alle derivate parziali.
Al fine di ottenere dei risultati quantitativi, sia pure approssimati, con riferimento al caso di strato limite laminare, si assuma un profilo di velocità di forma parabolica con derivata nulla all’interfaccia tra strato limite e moto a potenziale [0≤y≤δ(x)] e valore nullo in corrispondenza della parete1, del tipo
−= 2
22),(u
δ
y
δ
yUyx (5-203)
Si possono così ottenere le stime dello spessore di quantità di moto:
δ=
+−
−= ∫
δ
15
2
21
2θ
0 2
2
2
2
dyδ
y
δ
y
δ
y
δ
y (5-204)
e dello sforzo tangenziale sulla parete
δ
U
δ
y
δ
yUτ
yy
µ22
yy
u
0
2
2
0
0 =
−
∂∂µ=
∂∂µ=
==
(5-205)
Sostituendo in quest’ultima, la (5-202) e la (5-204), si ottiene l’equazione differenziale:
dxUρ
μδ dδ 15= (5-206)
che integrata tra 0 e x, con la condizione δ=0 per x=0, fornisce la relazione:
ρ U
μ xδ 15
2
1 2 = (5-207)
Pertanto la legge di variazione dello spessore relativo δ/x dello strato limite lungo la lastra risulta essere
x
/ ,
ρ U x
μ ,
x
δ
Re
5555
21
=
= (5-208)
in buon accordo con la soluzione esatta di Blasius.
1 Tale distribuzione di velocità parabolica si osserva in un moto di Poiseuille che si
sviluppa tra due lastre piane parallele [equazione (5-170) con B=2δ].

Interazioni fluido-solido
131
Combinando la (5-205) con la (5-208) si ricava la distribuzione dello sforzo tangenziale lungo la parete:
x
,ρUτ
Re
365020 = (5-209)
Sostituendo la (5-204) nella (5-208) si ottiene la legge di variazione dello spessore di quantità di moto:
x
,
x
θ
Re
7330= (5-210)
e quindi la resistenza idrodinamica (coincidente con la resistenza d’attrito per l’assenza di quella di forma) è, per le (5-202) e (5-210), pari a
L
L
x
,bLρUbθρUdxτbR
Re
733022
0
0 === ∫ (5-211)
Sostituendo la (5-203) nella (5-193) si ricava infine la stima dello spessore di spostamento δ*
δδ*3
1= (5-212)
ovvero:
x
,
x
δ*
Re
831= (5-213)
Nonostante l’approssimazione introdotta per le ipotesi sul profilo di velocità, i valori di δ/x forniti dalla (5-208), e di δ*/x dalla (5-213), sono poco diversi da quelli sperimentali.
5.7.2 Strato limite su lastra curva
Nel caso di lastra piana di lunghezza infinita parallela alla direzione della corrente che la investe, il gradiente di pressione non può essere positivo. Pertanto sulla superficie della lastra, per la condizione di aderenza, la (5-183) permette di asserire che
0y
u
x
p
0
2
2
≤
∂∂=
∂∂
=y
µ (5-214)
escludendo che la derivata seconda della velocità possa cambiare segno.

Dispense di Idraulica 132
Figura 5-29
Se la corrente segue invece una parete curva di un corpo (Figura 5-29 nella quale è stata linearizzata la parete), il campo di moto esterno presenta un’accelerazione iniziale nella parte anteriore del corpo stesso e quindi un gradiente di pressione negativo come mostra la (5-185), cioè la pressione decresce nel verso del moto (gradiente di pressione favorevole). Il secondo membro della (5-183) denota che il termine delle forze di pressione contrasta quello delle forze viscose1 e a contatto con la parete del corpo si ha
0y
u
02
2
<
∂∂=
∂∂
=yx
p µ (5-215)
Tale condizione è denotata come punto A nella Figura 5-29, in cui si è riportata la superficie curva linearizzata. La condizione al bordo dello strato limite, e cioè che per y=δ u=U, determina per la continuità della derivata della funzione u=u(y), che
1 Si dice anche che il lavoro delle forze di pressione tende a bilanciare la dissipazione
viscosa.
Interazioni fluido-solido
133
0y
u =
∂∂
=δy
(5-216)
e pertanto in A si ha che
0y
u
0
>
∂∂
=y
µ (5-217)
Con un gradiente di pressione favorevole il rallentamento del fluido dello strato limite risulta quindi minore (comportando quindi un minore scostamento delle linee di corrente) rispetto al caso di assenza del termine delle forze viscose, causando una crescita non rapida dello spessore dello strato nel verso del moto.
Nella parte posteriore del corpo che tende a restringersi, la corrente esterna tende a decelerare e il gradiente di pressione si presenta positivo con pressione quindi crescenti nel verso del moto (gradiente di pressione avverso, dp/dx>0) e si ha, sempre a contatto con la parete (punti C e D di Figura 5-29)
0y
u
x
p
02
2
>
∂∂=
∂∂
=y
µ (5-218)
Con un gradiente avverso il fluido subisce nello strato limite un maggiore rallentamento, rispetto al caso di assenza del termine delle forze viscose, con uno spessore δ che aumenta quindi più velocemente del gradiente favorevole. Esiste per continuità un punto B (Figura 5-29) al limite tra parte anteriore e parte posteriore in cui
0y
u
x
p
02
2
=
∂∂=
∂∂
=y
µ (5-219)
Nella parte posteriore possono verificarsi condizioni in cui le particelle prossime alla parete si arrestano in un punto denominato di arresto o stallo (punto C di Figura 5-29) in cui
0y
u
0
=
∂∂
=y
(5-220)
che equivale a dire che lo sforzo tangenziale alla parete si annulla. In questo punto quindi il profilo di velocità parte con tangente nulla, terminando per y=δ ancora con tangente nulla. Ciò denota la presenza di un punto di flesso nello strato limite.
A valle del punto di arresto, vi è una regione (punto D di Figura 5-17) in cui il flusso inverte la direzione e si osserva il cosiddetto fenomeno della separazione
Dispense di Idraulica 134
dello strato limite, con conseguente generazione di turbolenza ed ispessimento dello strato limite stesso1 e con la formazione di vortici che si distaccano dalla parete e vengono trasportati verso valle formando una scia. Il punto di arresto viene quindi anche denominato punto di distacco dello strato limite.
Nella regione di distacco la pressione si riduce rispetto ai valori ottenuti tramite la teoria dei moti a potenziale (Figura 5-17): la resistenza di forma del corpo è quindi tanto maggiore quanto più grande risulta l’ampiezza della regione di scia per effetto della differenza di pressione tra la parte anteriore e posteriore.
Il fenomeno del distacco si sposta verso valle nei corpi affusolati (profili alari), mentre non avviene lungo una lastra piana. Nei corpi tozzi, a causa della loro forma, non è possibile mantenere lo strato limite attaccato lungo la superficie e quindi la resistenza di forma risulta preponderante. Poiché le condizioni laminari spostano verso monte il punto di distacco, per i corpi tozzi conviene avere un flusso turbolento. Per questa ragione le palline da tennis sono dotate di una superficie resa scabra con una peluria che consente di ridurre la zona di distacco e quindi la resistenza di forma. Per lo stesso motivo la superficie delle palline da golf è resa scabra tramite numerose fossette (dimples).
5.7.3 Moto attorno a una sfera
Il problema del moto attorno a una sfera è stato in parte già affrontato nel caso di creeping flow che avviene per numeri di Reynolds ReD molto bassi (minore dell’unità) ottenendo la formula di Stokes (5-154).
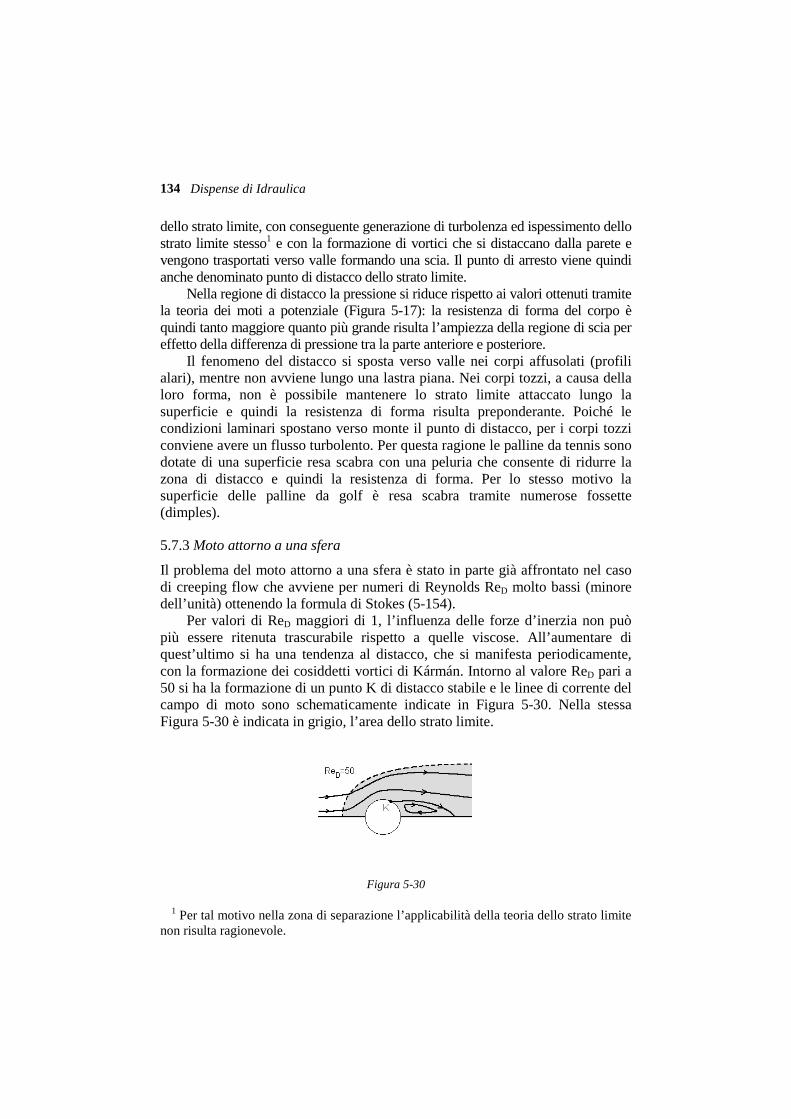
Per valori di ReD maggiori di 1, l’influenza delle forze d’inerzia non può più essere ritenuta trascurabile rispetto a quelle viscose. All’aumentare di quest’ultimo si ha una tendenza al distacco, che si manifesta periodicamente, con la formazione dei cosiddetti vortici di Kármán. Intorno al valore ReD pari a 50 si ha la formazione di un punto K di distacco stabile e le linee di corrente del campo di moto sono schematicamente indicate in Figura 5-30. Nella stessa Figura 5-30 è indicata in grigio, l’area dello strato limite.
Figura 5-30
1 Per tal motivo nella zona di separazione l’applicabilità della teoria dello strato limite non risulta ragionevole.
Interazioni fluido-solido
135
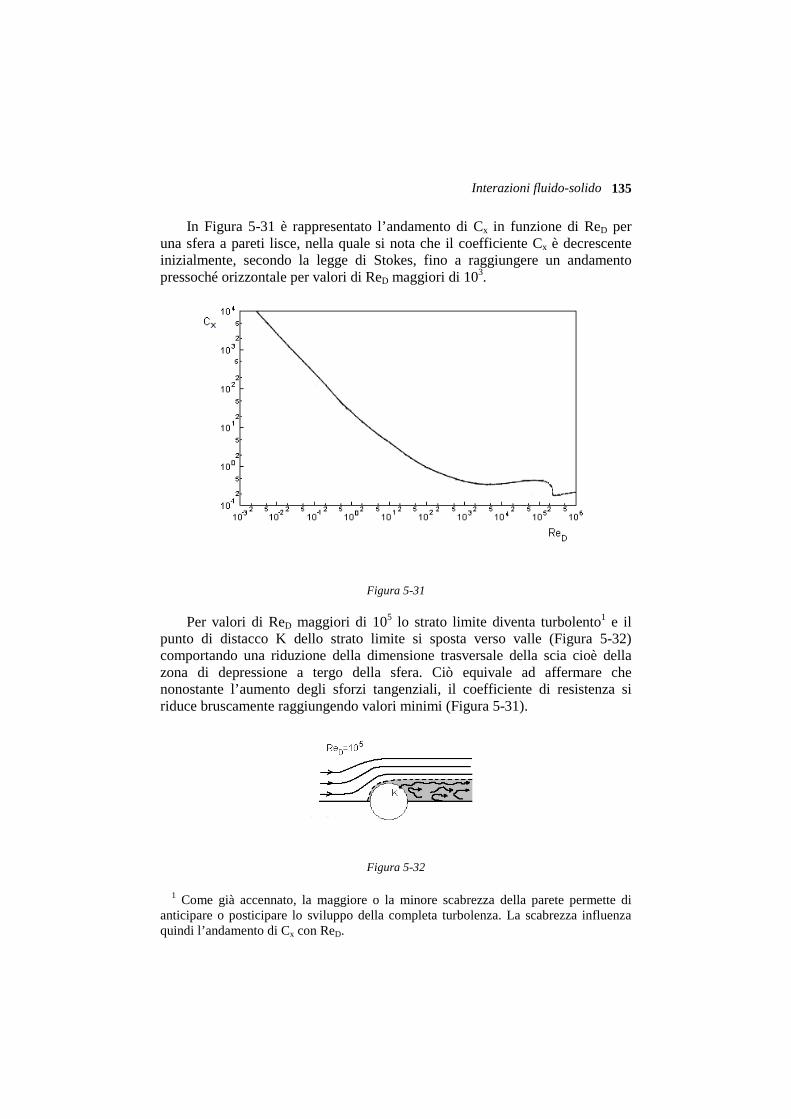
In Figura 5-31 è rappresentato l’andamento di Cx in funzione di ReD per una sfera a pareti lisce, nella quale si nota che il coefficiente Cx è decrescente inizialmente, secondo la legge di Stokes, fino a raggiungere un andamento pressoché orizzontale per valori di ReD maggiori di 103.
Figura 5-31
Per valori di ReD maggiori di 105 lo strato limite diventa turbolento1 e il punto di distacco K dello strato limite si sposta verso valle (Figura 5-32) comportando una riduzione della dimensione trasversale della scia cioè della zona di depressione a tergo della sfera. Ciò equivale ad affermare che nonostante l’aumento degli sforzi tangenziali, il coefficiente di resistenza si riduce bruscamente raggiungendo valori minimi (Figura 5-31).
Figura 5-32
1 Come già accennato, la maggiore o la minore scabrezza della parete permette di
anticipare o posticipare lo sviluppo della completa turbolenza. La scabrezza influenza quindi l’andamento di Cx con ReD.

Dispense di Idraulica 136
Per valori ancora superiori di ReD il coefficiente di resistenza aumenta di nuovo per effetto dell’incremento delle resistenze d’attrito.
In generale la curva rappresentativa di Cx in funzione di ReD, oltre che dalla scabrezza della superficie, è comunque influenzata dalla forma del corpo.

![Physiology & Behaviorproducts, which play important roles in sexual arousal and reproduction in frogs [31]. At a practical level, this remarkable change in sexual moti-vation imposes](https://static.fdocument.org/doc/165x107/60ce49563d6bb7562a0ba333/physiology-products-which-play-important-roles-in-sexual-arousal-and-reproduction.jpg)