Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional...
47
Algorithms for the Nonsymmetric Eigenvalue Problem Applied Numerical Linear Algebra. Lecture 10 1 / 47
Transcript of Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional...
![Page 1: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/1.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Applied Numerical Linear Algebra. Lecture 10
1 / 47
![Page 2: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/2.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
4.2 Canonical Forms
DEFINITION 4.1. The polynomial p(λ) = det(A− λI ) is called thecharacteristic polynomial of A. The roots of p(λ) = 0 are theeigenvalues of A.Since the degree of the characteristic polynomial p(λ) equals n, thedimension of A, it has n roots, so A has n eigenvalues.
DEFINITION 4.2. A nonzero vector x satisfying Ax = λx is a (right)eigenvector for the eigenvalue λ. A nonzero vector y such thaty∗A = λy∗ is a left eigenvector. (Recall that y∗ = (y)T is the conjugatetranspose of y .)
2 / 47
![Page 3: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/3.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
DEFINITION 4.3. Let S be any nonsingular matrix. Then A andB = S−1AS are called similar matrices, and S is a similaritytransformation.PROPOSITION 4.1. Let B = S−1AS , so A and B are similar. Then Aand B have the same eigenvalues, and x (or y) is a right (or left)eigenvector of A if and only if S−1x (or S∗y) is a right (or left)eigenvector of B .
Proof. Using the fact that det(X · Y ) = det(X ) · det(Y ) for any squarematrices X and Y , we can write
det(A− λI ) = det(S−1(A− λI )S) = det(B − λI ).
So A and B have the same characteristic polynomials. Ax = λx holds ifand only if S−1ASS−1x = λS−1x or B(S−1x) = λ(S−1x). Similarly,y∗A = λy∗ if and only if y∗SS−1AS = λy∗S or (S∗y)∗B = λ(S∗y)∗. �
3 / 47
![Page 4: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/4.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
THEOREM 4.1. Jordan canonical form. Given A, there exists anonsingular S such that S−1AS = J, where J is in Jordan canonicalform. This means that J is block diagonal, withJ = diag(Jn1(λ1), Jn2(λ2), . . . , Jnk (λk)) and
Jni (λi ) =
λi 1 0. . .
. . .
. . . 10 λi
ni×ni
.
J is unique, up to permutations of its diagonal blocks.
For a proof of this theorem, see a book on linear algebra such as[F. Gantmacher. The Theory of Matrices, vol. II (translation). Chelsea,New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. VanNostrand, New York, 1958].
4 / 47
![Page 5: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/5.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Each Jm(λ) is called a Jordan block with eigenvalue λ of algebraicmultiplicity m.
If some ni = 1, and λi is an eigenvalue of only that one Jordanblock, then λi is called a simple eigenvalue.
If all ni = 1, so that J is diagonal, A is called diagonalizable;otherwise it is called defective.
An n-by-n defective matrix does not have n eigenvectors. Althoughdefective matrices are ”rare” in a certain well-defined sense, the factthat some matrices do not have n eigenvectors is a fundamental factconfronting anyone designing algorithms to compute eigenvectorsand eigenvalues.
Symmetric matrices are never defective.
5 / 47
![Page 6: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/6.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
PROPOSITION 4.2.
A Jordan block has one right eigenvector, e1 = [1, 0, . . . , 0]T , andone left eigenvector, en = [0, . . . , 0, 1]T .
Therefore, a matrix has n eigenvectors matching its n eigenvalues ifand only if it is diagonalizable.
In this case, S−1AS = diag(λi ). This is equivalent toAS = S diag(λi ), so the i-th column of S is a right eigenvector forλi .
It is also equivalent to S−1A = diag(λi )S−1 , so the conjugate
transpose of the ith row of S−1 is a left eigenvector for λi .
If all n eigenvalues of a matrix A are distinct, then A isdiagonalizable.
6 / 47
![Page 7: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/7.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
From Jordan to Schur canonical form
Instead of computing S−1AS = J, where S can be an arbitrarilyill-conditioned matrix, we will restrict S to be orthogonal (soκ2(S) = 1) to guarantee stability.
We cannot get a canonical form as simple as the Jordan form anymore.
7 / 47
![Page 8: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/8.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
THEOREM 4.2. Schur canonical form. Given A, there exists a unitarymatrix Q (Q∗Q = QQ∗ = I ) and an upper triangular matrix T such thatQ∗AQ = T . The eigenvalues of A are the diagonal entries of T .
Proof. We use induction on n. It is obviously true if A is 1 by 1. Now letλ be any eigenvalue and u a corresponding eigenvector normalized so||u||2 = 1. Choose U so U = [u, U] is a square unitary matrix. (Notethat λ and u may be complex even if A is real.) Then
U∗ · A · U =
[u∗
U∗
]
· A · [u, U] =
[u∗Au u∗AUU∗Au U∗AU
]
.
8 / 47
![Page 9: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/9.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Now we can write u∗Au = λu∗u = λ, and U∗Au = λU∗u = 0 so
U∗AU ≡[
λ a120 A22
]
. By induction, there is a unitary P , so
P∗A22P = T is upper triangular. Then
U∗AU =
[λ a120 PTP∗
]
=
[1 00 P
] [λ a12P
0 T
] [1 00 P∗
]
,
so [1 00 P∗
]
U∗
︸ ︷︷ ︸
Q∗
AU
[1 00 P
]
︸ ︷︷ ︸
Q
=
[λ a12P
0 T
]
= T
is upper triangular and Q = U[1 00 P
] is unitary as desired. ⋄
9 / 47
![Page 10: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/10.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Remarks on Schur canonical form
Notice that the Schur form is not unique, because the eigenvaluesmay appear on the diagonal of T in any order.
This introduces complex numbers even when A is real. When A isreal, we prefer a canonical form that uses only real numbers,because it will be cheaper to compute.
This means that we will have to sacrifice a triangular canonical formand settle for a block-triangular canonical form.
10 / 47
![Page 11: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/11.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
THEOREM 4.3. Real Schur canonical form. If A is real, there exists areal orthogonal matrix V such that V TAV = T is quasi-upper triangular.This means that T is block upper triangular with 1-by-1 and 2-by-2blocks on the diagonal. Its eigenvalues are the eigenvalues of its diagonalblocks. The 1-by-1 blocks correspond to real eigenvalues, and the 2-by-2blocks to complex conjugate pairs of eigenvalues.
11 / 47
![Page 12: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/12.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
4.2.1. Computing Eigenvectors from the Schur Form
Let Q∗AQ = T be the Schur form. Then if Tx = λx , we have
Tx = λx → (Q∗AQ)x = Tx = λx → AQx = QTx = λQx
, so Qx is an eigenvector of A. So to find eigenvectors Qx of A, itsuffices to find eigenvectors x of T .Suppose that λ = tii has multiplicity 1 (i.e., it is simple). Write(T − λI )x = 0 as
0 =
T11 − λI T12 T13
0 0 T23
0 0 T33 − λI
x1x2x3
=
(T11 − λI )x1 + T12x2 + T13x3T23x3
(T33 − λI )x3
,
where T11 is (i − 1)-by-(i − 1), T22 = λ is 1-by-1, T33 is(n − i)-by-(n − i), and x is partitioned conformably.
12 / 47
![Page 13: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/13.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Since λ is simple, both T11 − λI and T33 − λI are nonsingular, so(T33 − λI )x3 = 0 implies x3 = 0. Therefore (T11 − λI )x1 = −T12x2.Choosing (arbitrary) x2 = 1 means x1 = −(T11 − λI )−1T12, so
x =
(λI − T11)−1T12
10
,
13 / 47
![Page 14: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/14.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
THEOREM 4.4. Let λ be a simple eigenvalue of A with right eigenvectorx and left eigenvector y , normalized so that ||x ||2 = ||y ||2 = 1. Letλ+ δλ be the corresponding eigenvalue of A+ δA. Then
δλ = y∗δAxy∗x
+ O(||δA||2) or
|δλ| ≤ ||δA|||y∗x| + O(||δA||2) = secΘ(y , x)||δA||+ O(||δA||2),
where Θ(y , x) is the acute angle between y and x . In otherwords,secΘ(y , x) = 1/|y∗x | is the condition number of the eigenvalue λ.
14 / 47
![Page 15: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/15.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Proof. Subtract Ax = λx from (A+ δA)(x + δx) = (λ+ δλ)(x + δx) toget
Aδx + δAx + δAδx = λδx + δλx + δλδx .
Ignore the second-order terms (those with two ”δ terms” as factors:δAδx and δλδx) and multiply by y∗ to get
y∗Aδx︸ ︷︷ ︸
cancels
+y∗δAx = y∗λδx︸ ︷︷ ︸
cancels
+y∗δλx .
Now y∗Aδx cancels y∗λδx , so we can solve for δλ = (y∗δAx)/(y∗x) asdesired. �
15 / 47
![Page 16: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/16.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
COROLLARY 4.1. Let A be symmetric (or normal: AA∗ = A∗A). Then|δλ| ≤ ||δA||+ O(||δA||2).
Proof. If A is symmetric or normal, then its eigenvectors are allorthogonal, i.e., Q∗AQ = Λ with QQ∗ = I . So the right eigenvectors x(columns of Q) and left eigenvectors y (conjugate transposes of the rowsof Q∗) are identical, and 1/|y∗x | = 1. �
16 / 47
![Page 17: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/17.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Bauer-Fike Theorem.
THEOREM 4.5. Bauer-Fike. Let A have all simple eigenvalues (i.e., bediagonalizable). Call them λi , with right and left eigenvectors xi and yi ,normalized so ||xi ||2 = ||yi ||2 = 1. Then the eigenvalues of A+ δA lie in
disks Bi , where Bi has center λi and radius n ||δA||2|y∗
ixi | .
Our proof will use Gershgorin’s theorem.
17 / 47
![Page 18: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/18.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
GERSHGORIN’S THEOREM. Let B be an arbitrary matrix. Then theeigenvalues λ of B are located in the union of the n disks defined by|λ− bii | ≤
∑
j 6=i |bij | for i = 1 to n.We will also need two lemmas and recall proposition 4.2.
18 / 47
![Page 19: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/19.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
PROPOSITION 4.2.
A Jordan block has one right eigenvector, e1 = [1, 0, . . . , 0]T , andone left eigenvector, en = [0, . . . , 0, 1]T .
Therefore, a matrix has n eigenvectors matching its n eigenvalues ifand only if it is diagonalizable.
In this case, S−1AS = diag(λi ). This is equivalent toAS = S diag(λi ), so the ith column of S is a right eigenvector forλi .
It is also equivalent to S−1A = diag(λi )S−1 , so the conjugate
transpose of the ith row of S−1 is a left eigenvector for λi .
If all n eigenvalues of a matrix A are distinct, then A isdiagonalizable.
19 / 47
![Page 20: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/20.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
LEMMA 4.1. Let S = [x1, . . . , xn] the nonsingular matrix of righteigenvectors. Then
S−1 =
y∗1 /y
∗1 x1
y∗2 /y
∗2 x2...
y∗n /y
∗n xn
.
Proof of Lemma. We know that A is diagonalizible and thus AS = SΛ,where Λ = diag(λ1, . . . , λn), since the columns xi of S are eigenvectors.This is equivalent to AS−1 = S−1Λ, so the rows of S−1 are conjugatetransposes of the left eigenvectors yi . So
S−1 =
y∗1 · c1...
y∗n · cn
for some constants ci . But I = S−1S , so 1 = (S−1S)ii = y∗i xi · ci , and
ci =1
y∗
ixi
as desired. �
20 / 47
![Page 21: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/21.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
LEMMA 4.2. If each column of (any matrix) S has two-norm equal to 1,||S ||2 ≤
√n. Similarly, if each row of a matrix has two-norm equal to 1,
its two-norm is at most√n.
Proof of Lemma. ||S ||2 = ||ST ||2 = max||x||2=1 ||ST x ||2. Eachcomponent of ST x is bounded by 1 by the Cauchy-Schwartz inequality,so ||ST x ||2 ≤ ||[1, . . . , 1
︸ ︷︷ ︸
n
]T ||2 =√n. �
21 / 47
![Page 22: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/22.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Proof of the Bauer-Fike theorem.We will apply Gershgorin’s theorem to S−1(A+ δA)S = Λ + F , whereΛ = S−1AS = diag(λ1, . . . , λn) and F = S−1δAS . The idea is to showthat the eigenvalues of A+ δA lie in balls centered at the λi with thegiven radii. To do this, we take the disks containing the eigenvalues ofΛ + F that are defined by Gershgorin’s theorem,
|λ− (λi + fii )| ≤n∑
j 6=i
|fij |,
and enlarge them slightly to get the disks
|λ− λi | ≤n∑
j
1 · |fij | ≤ (n∑
j
1)1/2
n∑
j
|fij |2
1/2
byCauchy − Schwarz
≤ n1/2
n∑
j
|fij |2
1/2
byCauchy − Schwarz
= n1/2 · ||F (i , :)||2.
22 / 47
![Page 23: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/23.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Now we need to bound the two-norm of the i-th row F (i , :) ofF = S−1δAS :
||F (i , :)||2 = ||(S−1δAS)(i , :)||2≤ ||(S−1)(i , :)||2 · ||δA||2 · ||S ||2
︸ ︷︷ ︸
≤√n
by Lemma1.7
≤ n1/2
|y∗i xi |
· ||δA||2 by Lemmas 4.1 and 4.2.
Combined this equation with equation above, this proves the theorem.
|λ− λi︸︷︷︸
centers
| ≤ n1/2 · ||F (i , :)||2
≤ n1/2 · n1/2
|y∗i xi |
· ||δA||2 =n
|y∗i xi |
· ||δA||2︸ ︷︷ ︸
radius
�
23 / 47
![Page 24: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/24.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
THEOREM 4.6. Let λ be a simple eigenvalue of A, with unit right andleft eigenvectors x and y and condition number c = 1/|y∗x |. Then thereis a δA such that A+ δA has a multiple eigenvalue at λ, and
||δA||2||A||2
≤ 1√c2 − 1
.
When c ≫ 1, i.e., the eigenvalue is ill-conditioned, then the upper boundon the distance is 1/
√c2 − 1 ≈ 1
c, the reciprocal of the condition
number.
24 / 47
![Page 25: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/25.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Algorithms for the Nonsymmetric Eigenvalue Problem
We assume that A is real.
Power method
This method can find only the largest eigenvalue for A and thecorresponding eigenvector.
Inverse iteration
We find all other eigenvalues and eigenvectors applying method for(A− σI )−1 for some shift σ.
Orthogonal iteration
Lets compute entire invariant subspace.
QR iteration
reorganized orthogonal iteration, ultimate algorithm.
Hessenberg reduction
Tridiagonal and bidiagonal reduction
25 / 47
![Page 26: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/26.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Power Method
ALGORITHM 4.1. Power method: Given x0, we iterate
i = 0repeatyi+1 = Axixi+1 = yi+1/||yi+1||2 (approximate eigenvector)
λi+1 = xTi+1Axi+1 (approximate eigenvalue)i = i + 1
until convergence
26 / 47
![Page 27: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/27.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Let us first apply this algorithm in the very simple case whenA = diag(λ1, ..., λn), with |λ1| > |λ2| ≥ · · · ≥ |λn|). In this case theeigenvectors are just the columns ei of the identity matrix. Note that xican also be written xi = Aix0/||Aix0||2, since the factors 1/||yi+1||2 onlyscale xi+1 to be a unit vector and do not change its direction. TakingS = I lets us write x0 = S(S−1x0) = [ξ1, . . . , ξn]
T , or
Aix0 ≡ Ai
ξ1ξ2...ξn
=
ξ1λi1
ξ2λi2
...ξnλ
in
= ξ1λ
i1
1ξ2ξ1(λ2
λ1)i
...ξnξ1(λn
λ1)i
,
where we have assumed ξ1 6= 0. Since all the fractions λj/λ1 are lessthan 1 in absolute value, Aix0 becomes more and more nearly parallel toe1, so xi = Aix0/||Aix0||2 becomes closer and closer to ±ei , theeigenvector corresponding to the largest eigenvalue λ1. The rate ofconvergence depends on how much smaller than 1 the ratios|λ2/λ1| ≥ · · · ≥ |λn/λ1|) are, the smaller the faster. Since xi convergesto ±e1, λi = xTi Axi converges to λ1, the largest eigenvalue.
27 / 47
![Page 28: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/28.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Assumptions on power method
In the simplest case we applied algorithm when A is diagonal.
Consider now general case: assume that A = SΛS−1 isdiagonalizable, with Λ = diag(λ1, . . . , λn) and the eigenvaluessorted so that |λ1| > |λ2| ≥ · · · ≥ |λn|. Write S = [s1, . . . , sn],where the columns si are the corresponding eigenvectors and alsosatisfy ||si ||2 = 1; in the last paragraph we had S = I . This lets uswrite x0 = S(S−1x0) ≡ S([ξ1, . . . , ξn]
T). Also, since A = SΛS−1,we can write
Ai = (SΛS−1) · · · (SΛS−1)︸ ︷︷ ︸
i times
= SΛiS−1
since all the S−1 · S pairs cancel.
28 / 47
![Page 29: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/29.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
This finally lets us write
Aix0 = SΛiS−1︸ ︷︷ ︸
Ai
·S
ξ1ξ2...ξn
= S
ξ1λi1
ξ2λi2
...ξnλ
in
= ξ1λ
i1S
1ξ2ξ1(λ2
λ1)i
...ξnξ1(λn
λ1)i
.
As before, the vector j in brackets converges to e1, so Aix0 gets closerand closer to a multiple of Se1 = s1, the eigenvector corresponding to λ1.Therefore, λi = xTi Axi converges to sT1 As1 = sT1 λ1s1 = λ1.
29 / 47
![Page 30: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/30.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
A minor drawback of this method is the assumption that ξ1 6= 0,i.e., that x0 is not the invariant subspace span{s2, . . . , sn} this istrue with very high probability if x0 is chosen at random.
A major drawback is that it converges to theeigenvalue/eigenvector pair only for the eigenvalue of largestabsolute magnitude, and its convergence rate depends on |λ2/λ1|,a quantity which may be close to 1 and thus cause very slowconvergence. Indeed, if A is real and the largest eigenvalue iscomplex, there are two complex conjugate eigenvalues of largestabsolute value |λ1| = |λ2|, and so the above analysis does not workat all. In the extreme case of an orthogonal matrix, all theeigenvalues have the same absolute value, namely, 1.
To plot the convergence of the power method, seeHOMEPAGE/Matlab/powerplot.m.
30 / 47
![Page 31: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/31.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
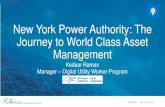
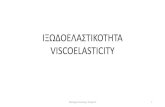
Examples of running of Power method in Matlab
1 2 3 4 5 6 7−0.2151
−0.215
−0.2149
−0.2148
−0.2147
−0.2146
−0.2145
Number of iterations in Power method
Com
pute
d ei
genv
alue
s
Example1. Comp. eig.:−0.21505, Ref. eig.:−5 2 5
0 20 40 60 80 100 120 140 160 18011.5
12
12.5
13
13.5
14
Number of iterations in Power method
Com
pute
d ei
genv
alue
s
Example2. Comp. eig.:12.3246, Ref. eig.:12 −11 −0.32 1.2
0 100 200 300 400 500 600 700 800 900 1000−4
−2
0
2
4
Number of iterations in Power method
Com
pute
d ei
genv
alue
s
Example3. Comp. eig.:−2.8322, Ref. eig.:1.5+0i −0.73−8.1i −0.73+8.1i
1 2 3 4 5 6 7 8 9 102.87
2.875
2.88
2.885
2.89
2.895
Number of iterations in Power method
Com
pute
d ei
genv
alue
s
Example4. Comp. eig.:2.8923, Ref. eig.:2.9+0i −0.48−0.42i −0.48+0.42i 0.062−0.12i 0.062+0.12i
Results are described in the next two slides.
31 / 47
![Page 32: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/32.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Example 1. In this example we test the matrix
A =
5 0 00 2 00 0 −5
with exact eigenvalues (5, 2,−5). The Power method can converge as to the exact first eigenvalue 5 aswell as to the completely erroneous eigenvalue, see Figure. This is because two eigenvalues of this matrix,5 and −5, have the same absolute values: |5| = | − 5|. Thus, assumption 2 about convergence of thePower method is not fulfilled.
Example 2. In this example the matrix A is given by
A =
3 7 8 95 −7 4 −71 −1 1 −19 3 2 5
This matrix has four different reference real eigenvalues λ = (λ1, ..., λ4) given byλ = (12.3246,−11.1644,−0.3246, 1.1644).Now all assumptions about matrix A are fulfilled and the Power method has converged to the referenceeigenvalue 12.3246, see Figure. We note that reference eigenvalues on this figure are rounded.
32 / 47
![Page 33: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/33.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Example 3. Now we take the matrix
A =
0 5 −26 0 −121 3 0
with one real and two complex eigenvalues:λ = (1.4522,−0.7261 + 8.0982i,−0.7261 − 8.0982i).We observe at Figure that Power method does not converge in this case again. This is because assumption4 on the convergence of the power method is not fulfilled.
Example 4. In this example the matrix A has size 5 × 5. Elements of this matrix are uniformly distributedpseudorandom numbers on the open interval (0, 1). Using the Figure we observe that in the first round ofour computations we have obtained good approximation to the eigenvalue 2.9 thought not all assumptionsabout Power method are fulfilled. This means that on the second round of computations we can getcompletely different erroneous eigenvalue. This example is similar to the example 1 where convergence wasnot achieved.
33 / 47
![Page 34: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/34.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Inverse Iteration
We will overcome the drawbacks of the power method just described byapplying the power method to (A− σI )−1 instead of A, where σ is calleda shift. This will let us converge to the eigenvalue closest to σ, ratherthan just λ1. This method is called inverse iteration or the inverse powermethod.ALGORITHM 4.2. Inverse iteration: Given x0, we iterate
i = 0repeatyi+1 = (A− σI )−1xixi+1 = yi+1/||yi+1||2 (approximate eigenvector)
λi+1 = xTi+1Axi+1 (approximate eigenvalue)i = i + 1
until convergence
34 / 47
![Page 35: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/35.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
To analyze the convergence, note that A = SΛS−1 impliesA− σI = S(Λ− σI )S−1 and so (A− σI )−1 = S(Λ− σI )−1S−1. Thus(A− σI )−1 has the same eigenvectors si as A with correspondingeigenvalues ((Λ− σI )−1)jj = (λj − σ)−1. The same analysis as beforetells us to expect xi to converge to the eigenvector corresponding to thelargest eigenvalue in absolute value.
35 / 47
![Page 36: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/36.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Assume that |λk − σ| is smaller than all the other |λi − σ| so that(λk − σ)−1 is the largest eigenvalue in absolute value. Also, writex0 = S([ξ1, . . . , ξn]
T ) as before, and assume ξk 6= 0. Then
(A− σI )−ix0 = (S(Λ− σI )−iS−1)S
ξ1ξ2...ξn
= S
ξ1(λ1 − σ)−i
...ξn(λn − σ)−i
= ξk(λk − σ)−iS
ξ1ξk(λk−σλ1−σ )
i
...1...
ξnξk(λk−σλn−σ )
i
,
where the 1 is in entry k . Since all the fractions (λk − σ)/(λi − σ) areless than one in absolute value, the vector in brackets approaches ek , so(A− σI )−ix0 gets closer and closer to a multiple of Sek = sk , theeigenvector corresponding to λk . As before, λi = xTi Axi also convergesto λk .
36 / 47
![Page 37: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/37.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
The advantage of inverse iteration over the power method is theability to converge to any desired eigenvalue (the one nearest theshift σ).
By choosing σ a very close to a desired eigenvalue, we can convergevery quickly and thus not be as limited by the proximity of nearbyeigenvalues as is the original power method.
The method is particularly effective when we have a goodapproximation to an eigenvalue and want only its correspondingeigenvector.
37 / 47
![Page 38: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/38.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
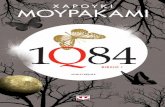
Examples of running of Inverse iteration method in Matlab
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
sExample 1. Comp. eig.:0.0020016, Ref. eig.:0 0
0 5 10 15 20 25 30 35 401.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 2. Comp. eig.:1.1644, Ref. eig.:12 −11 −0.32 1.2
0 2 4 6 8 10 12 14 16
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 3. Comp. eig.:1.4522, Ref. eig.:1.5+0i −0.73−8.1i −0.73+8.1i
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 4. Comp. eig.:2.4128, Ref. eig.:2.4+0i −0.24−0.33i −0.24+0.33i −0.079+0i 0.57+0i
σ = 2
38 / 47
![Page 39: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/39.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Examples of running of Inverse iteration method in Matlab
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2
2.5
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 1. Comp. eig.:0.0099784, Ref. eig.:0 0
0 5 10 15 20 25 30 354
5
6
7
8
9
10
11
12
13
14
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 2. Comp. eig.:12.3246, Ref. eig.:12 −11 −0.32 1.2
0 10 20 30 40 50 60 70 80 90−3
−2
−1
0
1
2
3
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 3. Comp. eig.:1.4522, Ref. eig.:1.5+0i −0.73−8.1i −0.73+8.1i
0 50 100 1500.5
1
1.5
2
2.5
Number of iterations in Inverse Power method
Com
pute
d ei
genv
alue
s
Example 4. Comp. eig.:2.2759, Ref. eig.:2.3+0i 0.29+0i −0.36−0.59i −0.36+0.59i −0.54+0i
σ = 10
39 / 47
![Page 40: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/40.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Example 1. In this example we tested the matrix
A =
[
0 100 0
]
which has exact eigenvalues λ = (0, 0) with multiplicity m = 2. From Figure we observe that InverseIteration method could converge to the reference eigenvalues for both shifts σ = 2 and σ = 10. We notethat by applying the Power method to this matrix as output eigenvalue we could get only NaN.
Example 2. We recall that reference eigenvalues in this case areλ = (12.3246,−11.1644,−0.3246, 1.1644).In this example we observe nice convergence too, see Figure. For the shift σ = 2 we could get eigenvalue1.1644 which is the same as the last reference eigenvalue. This is because shift σ = 2 is closer to thiseigenvalue than to all others. For the shift σ = 10 algorithm converged to the first reference eigenvalue12.3246, as expected.This test confirms that the Inverse iteration method converges to the eigenvalue which is closest to theshift σ.
Example 3. Figure shows nice convergence in this case too for both shifts σ. Recall, that Power methoddoes not converged at all, compare results on Figures.
Example 4.From Figure we observe nice convergence to the first eigenvalue of the matrix A for both shifts σ = 2, 10.
40 / 47
![Page 41: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/41.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Orthogonal Iteration
Our next improvement will permit us to converge to a(p > 1)-dimensional invariant subspace, rather than one eigenvector at atime. It is called orthogonal iteration (and sometimes subspace iterationor simultaneous iteration).
41 / 47
![Page 42: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/42.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
ALGORITHM 4.3. Orthogonal iteration: Let Z0 be an n × p orthogonalmatrix. Then we iterate
i = 0repeat
Yi+1 = AZi
Factor Yi+1 = Zi+1Ri+1 using Algorithm 3.2 (QR decomposition)(Zi+1 spans an approximateinvariant subspace)
i = i + 1until convergence
42 / 47
![Page 43: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/43.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
An informal analysis of the method of Orthogonal iteration
Assume |λp| > |λp+1|. If p = 1, this method and its analysis areidentical to the power method.
When p > 1, we write span{Zi+1} = span{Yi+1} = span{AZi}, sospan{Zi} = span{AiZ0} = span{SΛiS−1Z0}. Note that
SΛiS−1Z0 = S diag(λi1, . . . , λ
in)S
−1Z0
= λipS
(λ1/λp)i
. . .
1. . .
(λn/λp)i
S−1Z0.
43 / 47
![Page 44: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/44.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Since | λj
λp| ≥ 1 for j ≤ p and | λj
λp| < 1 if j > p, we get
(λ1/λp)i
. . .
(λn/λp)i
S−1Z0 =
[
V p×pi
W(n−p)×p
i
]
= Xi ,
where Wi approaches zero like (λp+1/λp)i , and Vi does not approach
zero. Indeed, if V0 has full rank (a generalization of the assumption insection 4.4.1 that ξ1 6= 0), then Vi will have full rank too. Write the
matrix of eigenvectors . Then S = [s1, . . . , sn] ≡ [Sn×pp , S
n×(n−p)p ],
i.e.Sp = [s1, . . . , sp]. Then SΛiS−1Z0 = λipS [
Vi
Wi] = λi
p(SpVi + SpWi ).
Thus
span(Zi ) = span(SΛiS−1Z0) = span(SpVi + SpWi ) = span(SpXi )
converges to span(SpVi ) = span(Sp), the invariant subspace spanned bythe first p eigenvectors, as desired. �
44 / 47
![Page 45: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/45.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
The use of the QR decomposition keeps the vectors spanningspan{AiZ0} of full rank despite roundoff.
Note that if we follow only the first p < p columns of Zi throughthe iterations of the algorithm, they are identical to the columnsthat we would compute if we had started with only the first pcolumns of Z0 instead of p columns. In other words, orthogonaliteration is effectively running the algorithm for p = 1, 2, . . . , p all atthe same time. So if all the eigenvalues have distinct absolutevalues, the same convergence analysis as before implies that the firstp ≤ p columns of Zi converge to span{s1, . . . , sp} for any p ≤ p.
Thus, we can let p = n and Z0 = I in the orthogonal iterationalgorithm. The next theorem shows that under certain assumptions,we can use orthogonal iteration to compute the Schur form of A.
45 / 47
![Page 46: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/46.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
THEOREM 4.8. Consider running orthogonal iteration on matrix A withp = n and Z0 = I . If all the eigenvalues of A have distinct absolutevalues and if all the principal submatrices S(1 : j , 1 : j) have full rank,then Ai ≡ ZT
i AZi converges to the Schur form of A, i.e., an uppertriangular matrix with the eigenvalues on the diagonal. The eigenvalueswill appear in decreasing order of absolute value.
46 / 47
![Page 47: Applied Numerical Linear Algebra. Lecture 10 · New York, 1959] or [P. Halmos. Finite Dimensional Vector Spaces. Van Nostrand, New York, 1958]. 4/47. Algorithms for the Nonsymmetric](https://reader042.fdocument.org/reader042/viewer/2022020303/5b5aeae57f8b9a302a8cd214/html5/page/47.jpg)
Algorithms for the Nonsymmetric Eigenvalue Problem
Sketch of Proof. The assumption about nonsingularity of S(1 : j , 1 : j)for all j implies that X0 is nonsingular, as required by the earlier analysis.Geometrically, this means that no vector in the invariant subspacespan{si , . . . , sj} is orthogonal to span{ei , . . . , ej}, the space spanned bythe first j columns of Z0I . First note that Zi is a square orthogonalmatrix, so A and Ai = ZT
i AZi are similar. Write Zi = [Z1i ,Z2i ], whereZ1i has p columns, so
Ai = ZTi AZi =
[
ZT1i AZ1i ZT
1i AZ2i
ZT2i AZ1i ZT
2i AZ2i
]
Since span{Z1i} converges to an invariant subspace of A, span{AZ1i}converges to the same subspace, so ZT
2i AZ1i converges to ZT2i Z1i = 0.
Since this is true for all p < n, every subdiagonal entry of Ai converges tozero, so Ai converges to upper triangular form, i.e., Schur form. �In fact, this proof shows that the submatrix ZT
2i AZ1i = Ai (p+1 : n, 1 : p)should converge to zero like |λp+1/λp|i . Thus, λp should appear as the(p, p) entry of Ai and converge like max(|λp+1/λp|i , |λp/λp−1|i ).
47 / 47
![THE EHRLICH-ABERTH METHOD FOR THEonal form [11], [14]. In the sparse case, the nonsymmetric Lanczos algorithm produces a nonsymmetric tridiagonal matrix. Other motivation for this](https://static.fdocument.org/doc/165x107/60aa58269dcb0e7be2687539/the-ehrlich-aberth-method-for-onal-form-11-14-in-the-sparse-case-the-nonsymmetric.jpg)




![ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ · Sennott L.I. (1999) Stochastic Dynamic Programming and the Control of Queueing Systems, Wiley, New York. [4]. Tijms H.C. (2003) A First](https://static.fdocument.org/doc/165x107/5f65698502aee000925f8724/oe-sennott-li-1999-stochastic-dynamic-programming.jpg)




![THE EHRLICH–ABERTH METHOD FOR THE NONSYMMETRICftisseur/reports/bgt.pdftridiagonal form [13], [18]. In the sparse case, the nonsymmetric Lanczos algorithm produces a nonsymmetric](https://static.fdocument.org/doc/165x107/60aa58279dcb0e7be268753a/the-ehrlichaaberth-method-for-the-ftisseurreportsbgtpdf-tridiagonal-form-13.jpg)