Année 2003-04 Cours de Traitement du...
32
Traitement du Signal Imprimé le 19/07/11 33 Université Paris-Sud ORSAY Département Mesures Physiques Année 2003-04 Cours de Traitement du Signal Partie 2 Transformation Signal continu Signal échantillonné Corrélation, modulation, détection, Laplace Roger REYNAUD temps fréquences e 2πj ν t δ(f-ν) Réel Imaginaire Réel Imaginaire La figure symbolise la transformation de Fourier permettant de passer d'une représentation temporelle complexe (ici la fonction de base de l’analyse en diagramme de Bode en analogique) à une représentation fréquentielle complexe équivalente
Transcript of Année 2003-04 Cours de Traitement du...
Traitement du Signal Imprimé le 19/07/11 33
Université Paris-Sud
ORSAY
Département Mesures Physiques
Année 2003-04
Cours de Traitement du Signal Partie 2
Transformation Signal continu � Signal échantillonné
Corrélation, modulation, détection, Laplace
Roger REYNAUD
temps fréquences
e 2πj ν t
δ(f-ν)
Réel
Imaginaire
Réel
Imaginaire
La figure symbolise la transformation de Fourier permettant de passer d'une représentation temporelle complexe (ici la fonction de base de l’analyse en diagramme de Bode en analogique) à une représentation fréquentielle complexe équivalente
34 Département Mesures physiques IUT Orsay
Plan du cours
Partie 1
• Transformation Temps Fréquence
Partie 2
• Transformation
Signal continu Signal échantillonné
Echantillonnage du signal .................................35 Importance du monde numérique ..........................35
Échantillonneur idéal .............................................36
Théorème de Shannon ...........................................37
Échantillonnage en présence d'une fonction d'appareil non idéale ............................38
Échantillonneur bloqueur.......................................40
Échantillonnage en fréquence ................................41
Quantification........................................................42
Notion de corrélation ........................................43 Réalisation de N expériences .................................43
Signaux stationnaires.............................................45
Relation entre deux processus au travers d'une seule réalisation.........................................45
Exemple de signal noyé dans le bruit.....................47
Modulation et Détection ...................................49 Modulation ............................................................49
Idée n°1 : Détection d'enveloppe sans intervention de référence ....................................50
Idée n°2 : Démodulation synchrone avec un signal de référence.........................................51
Idée n°3 : Détection synchrone avec un signal de référence..............................................52
Signal radio Longues Ondes ..................................52
Transformée de Laplace....................................55 Régime transitoire .................................................55
Représentation en variable complexe p ................55
Transformée de Laplace ........................................56
Traitement numérique du Signal.......................57 Fonctions continues � Suites numériques.........57
Transformées de Laplace � Transformées en Z .............................................58
Transformation en Z..............................................58
Propriétés...............................................................59
Tables des transformées.........................................60
Transformée inverse ..............................................61
Transformée de Fourier Discrète ...........................62
Exemples pratiques de TFD...................................64
Partie 3
• Filtrage numérique
Analogique Numérique
35
Echantillonnage du signal Importance du monde numérique
Monde analogique Monde numérique
Dérives et Réglages périodiques
Vieillissement des composants
Reproductibilité des montages
Taille des éléments pour les Basses Fréquences
Reproductibilité
Fiabilité
Versatilité (capacité à modifier certaines valeurs)
Programmable
Problèmes en suspens
Equivalence des traitements
Echantillonnage
Quantification
Rapidité de l'implémentation
De plus en plus de traitements sont effectués sous forme numérique, c'est-à-dire à l'aide d'un ordinateur numérique. Dans ce cas, les variables et les fonctions ne peuvent prendre que des valeurs numériques calculées en un nombre fini de points et avec une représentation de la valeur codée sur un nombre fini d'unités binaires d'Information (UBI ou bit en abréviation anglaise). Nous sommes donc en présence d'un nouveau problème qui n'est pas toujours équivalent au problème physique analogique initial.
Les premiers points qui vont nous intéresser seront les suivants :
• Connaître les différences entre le traitement analogique et son implantation numérique ;
• Connaître les approximations introduites, car les traitements ne sont pas parfaitement équivalents.
Conversion d'un signal analogique à paramètre continu vers un signal numérique
Le signal numérique est obtenu par une double approximation
� Echantillonnage s(t) est remplacé par s(nTe) = {Sn}
� Quantification Sn est remplacé par une valeur approchée quantifiée avec un pas de quantification q
Le passage d'un paramètre continu à discret s'appelle échantillonnage, le passage discret�continu s'appelle interpolation. Le passage de valeurs continues à discrètes s'appelle une quantification. Le passage inverse se fait par simple immersion des valeurs, codes ou symboles discrets dans un espace continu qui les englobe.
x paramètre continu x paramètre discret
Valeurs continues ���� échantillonnage ���� ↓ quantification Valeurs discrètes interpolation immersion ↑
Nous allons dans un premier temps nous intéresser au problème de l'échantillonnage du signal.
Principe
Le principe d'échantillonnage concerne la transformation d'un signal à temps continu en un signal à temps discret. Dans cette opération, une partie de l'information est habituellement perdue et il convient de bien comprendre le phénomène d'échantillonnage pour connaître et si possible minimiser l'information perdue.
Ce que nous allons montrer dans ce chapitre est : il existe certains signaux x(t) qui peuvent être reconstruits sans erreur à partir de leurs échantillons {Xn}. Ce sont le cas des signaux à bande limitée en fréquence en respectant la condition de Shannon qui sera énoncée plus loin.
36 Département Mesures physiques IUT Orsay
Dans ce cas là, nous dirons qu'il y a équivalence des représentations initiale analogique et numérique puisque nous savons obtenir la série {Xn} à partir de la fonction x(t) et inversement nous savons reconstruire par interpolation la fonction x(t) partout en connaissant la série {Xn}.
Cette équivalence des représentations nous donne le droit de choisir la représentation qui nous arrange le mieux et donc de traiter la résolution du problème initial sous forme numérique.
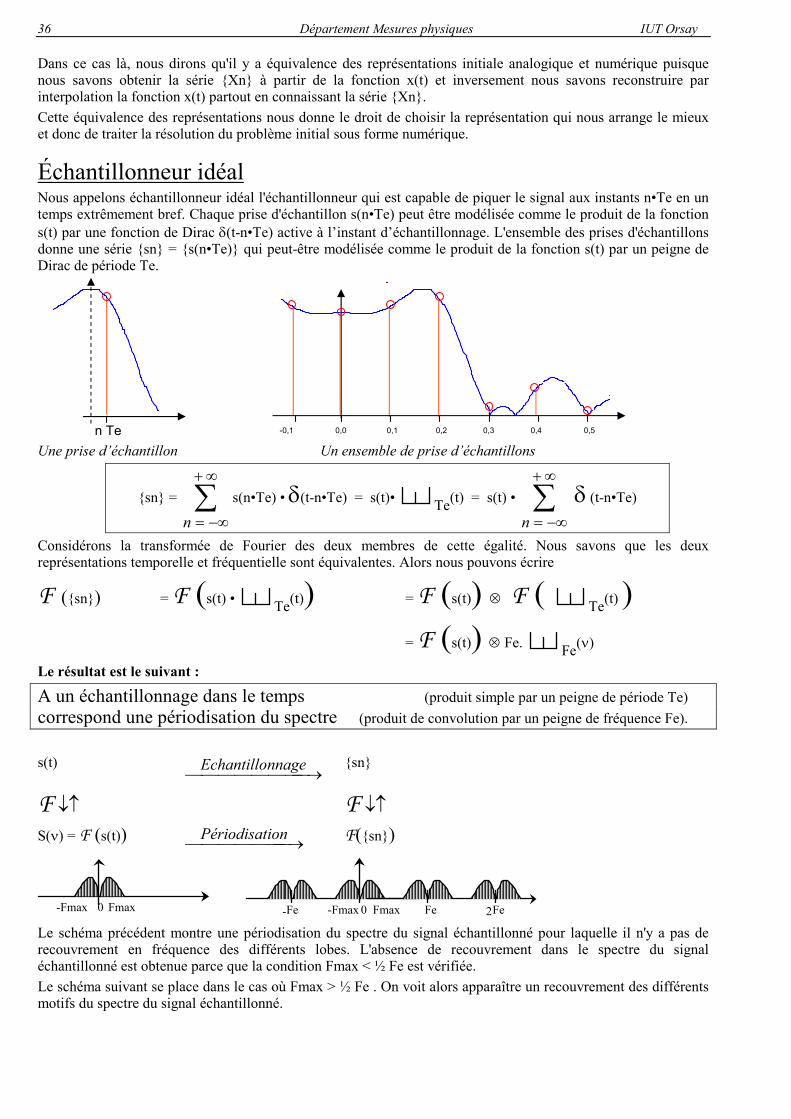
Échantillonneur idéal Nous appelons échantillonneur idéal l'échantillonneur qui est capable de piquer le signal aux instants n•Te en un temps extrêmement bref. Chaque prise d'échantillon s(n•Te) peut être modélisée comme le produit de la fonction s(t) par une fonction de Dirac δ(t-n•Te) active à l’instant d’échantillonnage. L'ensemble des prises d'échantillons donne une série {sn} = {s(n•Te)} qui peut-être modélisée comme le produit de la fonction s(t) par un peigne de Dirac de période Te.
Une prise d’échantillon Un ensemble de prise d’échantillons
{sn} = ∑∞+
−∞=n
s(n•Te) • δ(t-n•Te) = s(t)• Te(t) = s(t) • ∑∞+
−∞=n
δ (t-n•Te) Considérons la transformée de Fourier des deux membres de cette égalité. Nous savons que les deux représentations temporelle et fréquentielle sont équivalentes. Alors nous pouvons écrire
F ({sn}) = F (s(t) • Te(t)) = F (s(t)) ⊗ F ( Te(t) )
= F (s(t)) ⊗ Fe.
Fe(ν)
Le résultat est le suivant :
A un échantillonnage dans le temps (produit simple par un peigne de période Te)
correspond une périodisation du spectre (produit de convolution par un peigne de fréquence Fe).
s(t) → nnageEchantillo
{sn}
F ↓↑ F ↓↑
S(ν) = F (s(t)) → ionPériodisat
F({sn})
Fmax0-Fmax
Fmax0 Fe FeFe 2- -Fmax Le schéma précédent montre une périodisation du spectre du signal échantillonné pour laquelle il n'y a pas de recouvrement en fréquence des différents lobes. L'absence de recouvrement dans le spectre du signal échantillonné est obtenue parce que la condition Fmax < ½ Fe est vérifiée.
Le schéma suivant se place dans le cas où Fmax > ½ Fe . On voit alors apparaître un recouvrement des différents motifs du spectre du signal échantillonné.
n Te 0,5 -0,1 0,0 0,1 0,2 0,3 0,4

Traitement du Signal Imprimé le 19/07/11 37
S(ν) = F (s(t)) → ionPériodisat F ({sn})
Fmax0-Fmax
Fmax0 Fe FeFe 2- -Fmax
Théorème de Shannon Pour que la répétition du motif ne déforme pas le motif répété, il faut et il suffit que la condition de Shannon soit vérifiée, c'est-à-dire Fmax < ½ Fe .
Repliement du spectre
Soit un signal sinusoïdal pur à une fréquence f > ½ Fe. Par répétition due à la périodisation, nous allons voir des raies apparaître aux points ± f + n•Fe. A cause du repliement, le nouveau spectre périodique semble avoir une composante de fréquence comprise entre 0 et ½ Fe, bien que cela ne soit pas le cas initialement.
S(ν) = F (s(t)) → ionPériodisat F({sn})
f0-f Fe2
Fe
0 Fe FeFe 2- -Fe Fe2 2
Reconstitution de Shannon
Nous savons évidemment que l'opération d'échantillonnage peut amener une perte d'information. Cela est vrai lorsque la condition de Shannon n’est pas vérifiée. Mais lorsque cette condition est vraie, nous voulons savoir s'il est possible de reconstruire par interpolation le signal s(t) sans perte d'information.
La réponse est oui. Nous décidons de filtrer le signal échantillonné par un filtre idéal en fréquence. Sa
représentation est la porte Fe (ν). La sortie de ce filtre a pour réponse en fréquence le produit simple de la
réponse en fréquence de l'entrée (signal échantillonné) et du filtre. Sous la condition de Shannon, il n'y a pas de repliement de spectre et nous retrouvons la réponse en fréquence du signal s(t) à un facteur multiplicatif prés Fe. En utilisant l'équivalence des deux représentations, nous pouvons écrire dans la représentation en fréquence :
F({sn}) • Fe (ν) = [S(ν) ⊗ Fe. . ∑∞+
−∞=n
δ(ν-n•Fe)] • Fe (ν) = Fe • S(ν)
F ↓↑ F ↓↑ F ↓↑
Temps [ ∑∞+
−∞=n
s(nTe) δ(ν-n•Fe)] ⊗ Fe Sinc(πFet) = Fe • s(t)
En conséquence, et après division par Fe : ∑∞+
−∞=n
s(nTe) Sinc(πFe(t - n•Te)) = s(t)
Les deux signaux de part et d'autre du signe égal sont identiques si et seulement si leurs deux représentations en
fréquence sont identiques dans la bande de fréquences définie par la porte Fe (ν) . Cette condition n'est
vérifiée que si le spectre d'origine est intégralement dans cette bande et n'a pas de composante > ½ Fe.
Cette formule encadrée ci-dessus représente la formule d'interpolation de Shannon qui permet de retrouver le
signal continu s(t) à partir de la série {sn} = {s(nTe)}. L'existence de cette égalité montre qu'il y a équivalence entre le signal continu s(t) et la série {sn}, puisque nous pouvons reconstruire s(t) à partir de {sn} et {sn} à partir de s(t). Cette équivalence est vraie si et seulement si la condition de Shannon est vérifiée.
38 Département Mesures physiques IUT Orsay
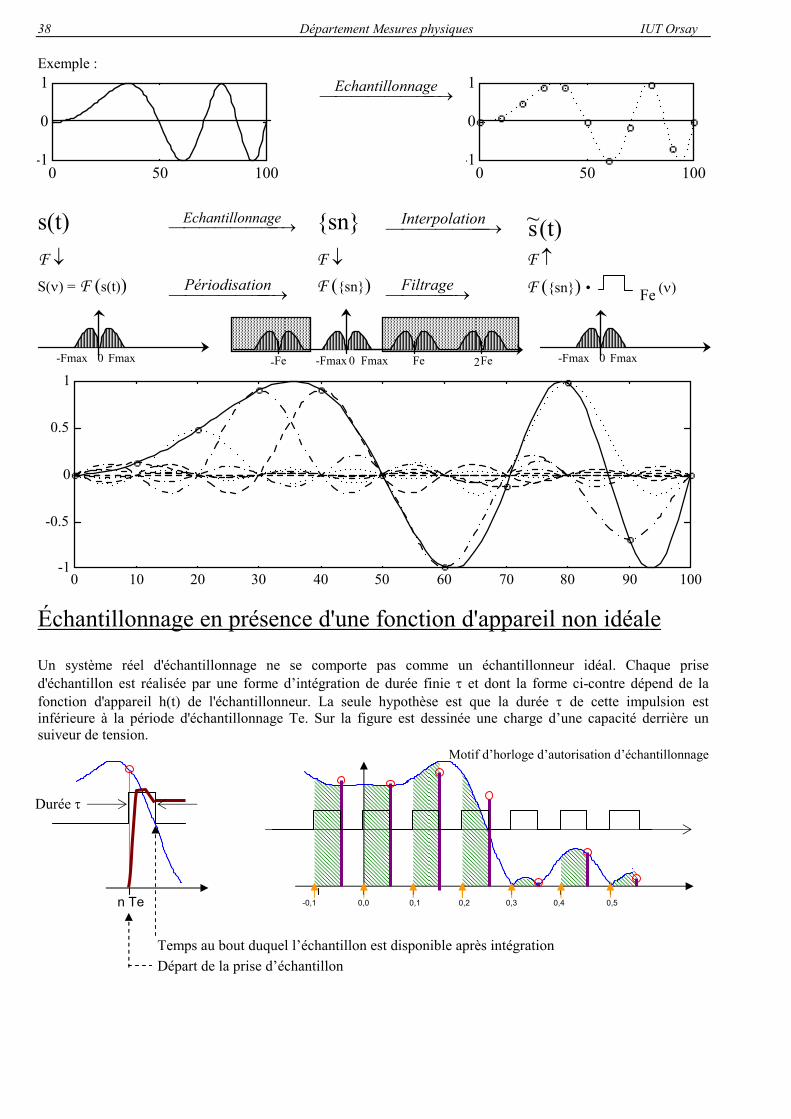
Exemple :
-1
0
1
0 50 100
→ nnageEchantillo
-1
0
1
0 50 100
s(t) → nnageEchantillo {sn} → ionInterpolat
~s(t) F ↓ F ↓ F ↑ S(ν) = F (s(t)) → ionPériodisat
F ({sn}) →Filtrage
F ({sn}) • Fe (ν)
Fmax0-Fmax Fmax0 Fe FeFe 2- -Fmax Fmax0-Fmax
-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 80 90 100
Échantillonnage en présence d'une fonction d'appareil non idéale
Un système réel d'échantillonnage ne se comporte pas comme un échantillonneur idéal. Chaque prise d'échantillon est réalisée par une forme d’intégration de durée finie τ et dont la forme ci-contre dépend de la fonction d'appareil h(t) de l'échantillonneur. La seule hypothèse est que la durée τ de cette impulsion est inférieure à la période d'échantillonnage Te. Sur la figure est dessinée une charge d’une capacité derrière un suiveur de tension.
Motif d’horloge d’autorisation d’échantillonnage
Temps au bout duquel l’échantillon est disponible après intégration
Départ de la prise d’échantillon
n Te 0,5 -0,1 0,0 0,1 0,2 0,3 0,4
Durée τ

Traitement du Signal Imprimé le 19/07/11 39
On considère alors que x(k•Te) = kTe−τ
kTe∫ x(t) h(t-k•Te) dt = x(t) ⊗ h(-t) (kTe) est la mesure au temps k•Te prise par un système d’échantillonneur réel.
Cet échantillon est alors considéré comme étant la valeur k de la série {xn} représentant la valeur du signal à l'instant k•Te. On peut alors écrire : x(k•Te) =[x(t) ⊗ h(-t)] δ(t - kTe). Tout se passe comme si le système échantillonnait de manière idéale une nouvelle fonction x(t) ⊗ h(-t).
{xn} = ∑∞+
−∞=n
x(t) ⊗ h(-t) • δ ( t-n•Te) = [x(t) ⊗ h(-t)] • Te (t) En effectuant une transformation de Fourier des deux membres de l'égalité précédente, nous obtenons F ({xn}) = F ([x(t) ⊗ h(-t)] • Te (t) ) = [F (x(t))• F ( h(-t)]) ] ⊗ Fe• Fe (t)
= [X(ν)•H(ν)] ⊗ Fe • Fe (t)
Pour retrouver la partie du spectre comprise entre -Fe/2 et Fe/2, nous multiplions la représentation fréquentielle
par le filtre passe-bas idéal Fe (ν), ce qui donne
F ({xn}) • Fe (ν) = ( [X(ν)•H(ν)] ⊗ Fe • Fe (t) ) • Fe (ν)
Par interpolation de Shannon, nous retrouvons cette fois non pas le signal x(t) mais x(t) filtré par le filtre de réponse impulsionnelle h(-t).
⇒ ∑∞+
−∞=n
x(nTe) • Sinc(πFe(t - n•Te)) = x(t) ⊗ h(-t)
Exemple : échantillonneur moyenneur
Nous prenons comme exemple d'échantillonnage avec une fonction d'appareil non idéale, le cas où la prise d'échantillon correspond à un moyennage ou une intégration du signal pendant une durée τ (par exemple nous pensons à la charge d'une capacité par un courant proportionnel à la tension du signal).
Motif d’horloge d’autorisation d’échantillonnage
x(t) xo (t)
La fonction h(t) vaut τ (t - τ/2) . Donc tout se passe comme si la réponse en fréquence X(ν) était remplacée par la réponse
Xo (ν) = X(ν) • H(ν) = X(ν) • sinc(πντ)•exp(-πjντ)
Le rapport des modules des réponses en fréquence vaut donc ||sinc(πντ)|| et le déphasage négatif vaut
-πντ. Nous appelons α le facteur de sur-échantillonnage Fe
2•Fmax et λ le rapport entre la durée τ de l'impulsion
et la durée Te de la période d'échantillonnage. On veut que la variation d'amplitude soit inférieure à 1%.
||Sinc(π•Fmax•τ)|| = ||Sinc(π Fe2 α λ Te ) || = ||Sinc(π
λ2 α )|| = 0,99 ⇔
λ2 α < 0,08
Si α =1, nous avons réglé la fréquence d'échantillonnage Fe juste égale à la limite de Shannon 2•Fmax, nous disons dans ce cas que le facteur de sur échantillonnage est égal à 1, alors la durée de l'impulsion ne doit pas dépasser 16% de la durée de la période d'échantillonnage.
Pour le même signal, on peut décider de prendre un sur échantillonnage α de 5, c'est-à-dire Fe = 10 • Fmax, alors on peut prendre une largeur d'impulsion égale à 80% de la période. Dans les deux cas, la durée τ autorisée est identique et vaut :
τ = 16%2•Fmax =
80%10•Fmax
40 Département Mesures physiques IUT Orsay
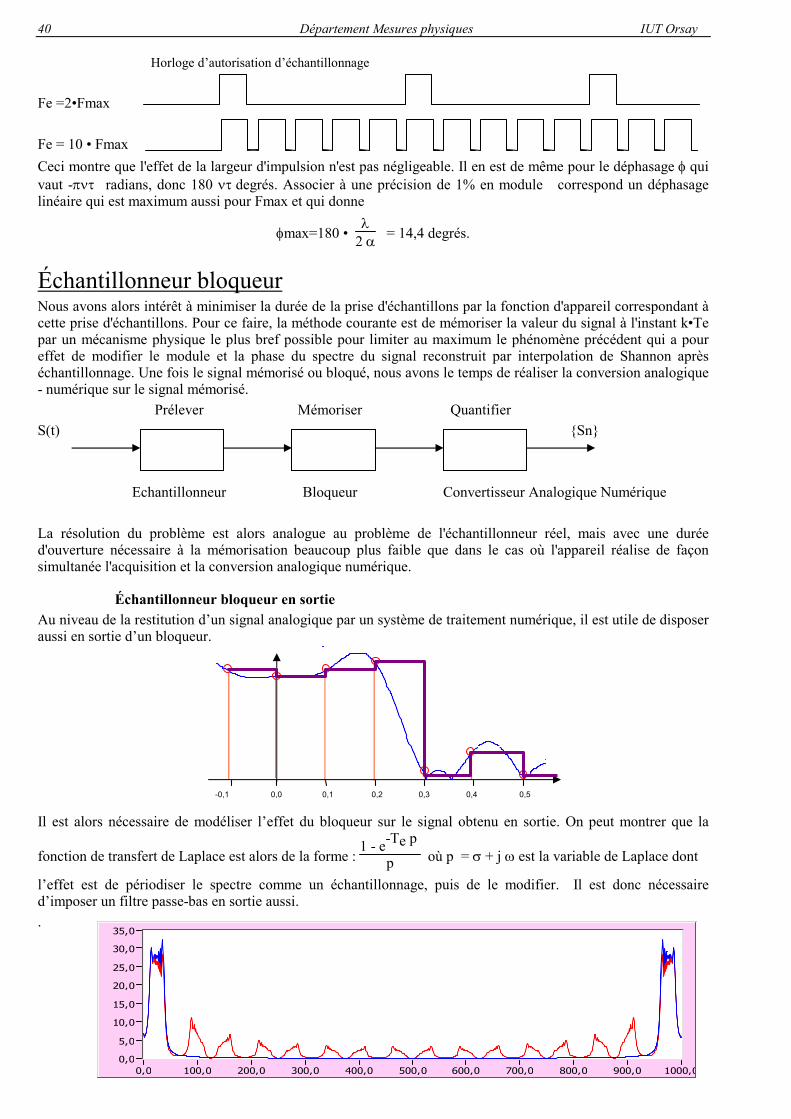
Horloge d’autorisation d’échantillonnage
Fe =2•Fmax
Fe = 10 • Fmax
Ceci montre que l'effet de la largeur d'impulsion n'est pas négligeable. Il en est de même pour le déphasage φ qui vaut -πντ radians, donc 180 ντ degrés. Associer à une précision de 1% en module correspond un déphasage linéaire qui est maximum aussi pour Fmax et qui donne
φmax=180 • λ2 α = 14,4 degrés.
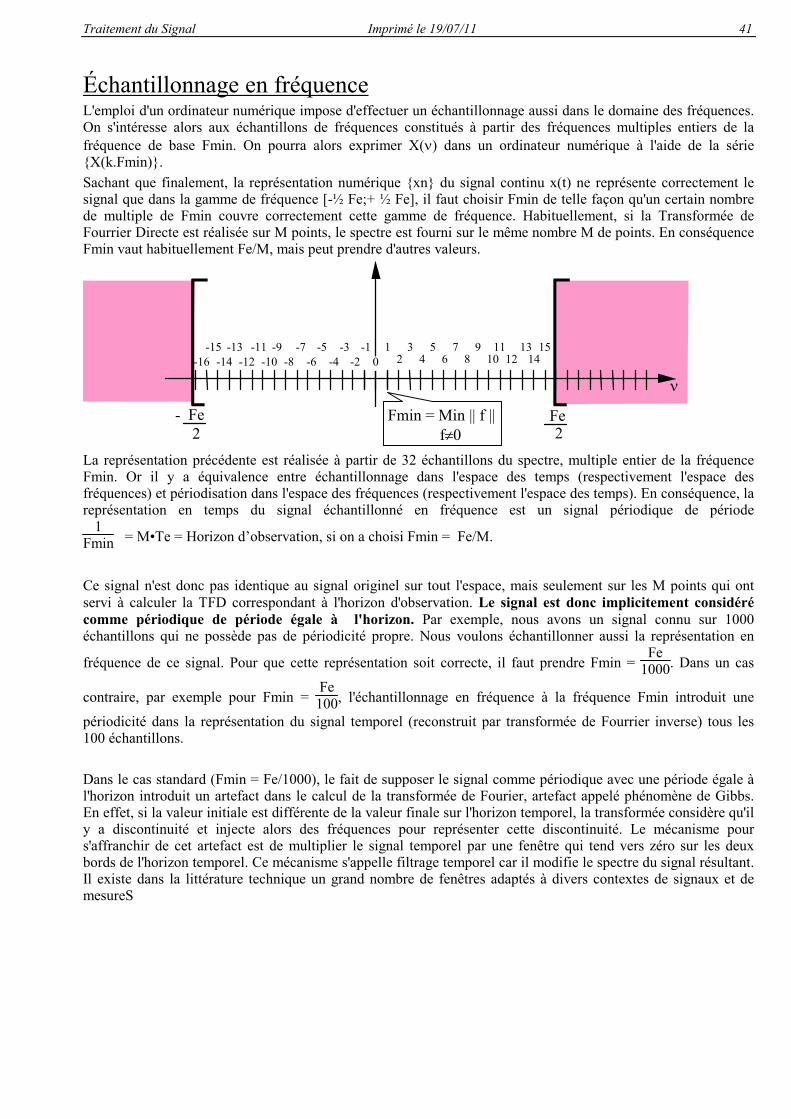
Échantillonneur bloqueur Nous avons alors intérêt à minimiser la durée de la prise d'échantillons par la fonction d'appareil correspondant à cette prise d'échantillons. Pour ce faire, la méthode courante est de mémoriser la valeur du signal à l'instant k•Te par un mécanisme physique le plus bref possible pour limiter au maximum le phénomène précédent qui a pour effet de modifier le module et la phase du spectre du signal reconstruit par interpolation de Shannon après échantillonnage. Une fois le signal mémorisé ou bloqué, nous avons le temps de réaliser la conversion analogique - numérique sur le signal mémorisé.
Prélever Mémoriser Quantifier
S(t) {Sn}
Echantillonneur Bloqueur Convertisseur Analogique Numérique
La résolution du problème est alors analogue au problème de l'échantillonneur réel, mais avec une durée d'ouverture nécessaire à la mémorisation beaucoup plus faible que dans le cas où l'appareil réalise de façon simultanée l'acquisition et la conversion analogique numérique.
Échantillonneur bloqueur en sortie
Au niveau de la restitution d’un signal analogique par un système de traitement numérique, il est utile de disposer aussi en sortie d’un bloqueur.
Il est alors nécessaire de modéliser l’effet du bloqueur sur le signal obtenu en sortie. On peut montrer que la
fonction de transfert de Laplace est alors de la forme : 1 - e-Te p
p où p = σ + j ω est la variable de Laplace dont
l’effet est de périodiser le spectre comme un échantillonnage, puis de le modifier. Il est donc nécessaire d’imposer un filtre passe-bas en sortie aussi.
.
0,5 -0,1 0,0 0,1 0,2 0,3 0,4
35,0
0,0
5,0
10,0
15,0
20,0
25,0
30,0
1000,00,0 100,0 200,0 300,0 400,0 500,0 600,0 700,0 800,0 900,0
Traitement du Signal Imprimé le 19/07/11 41
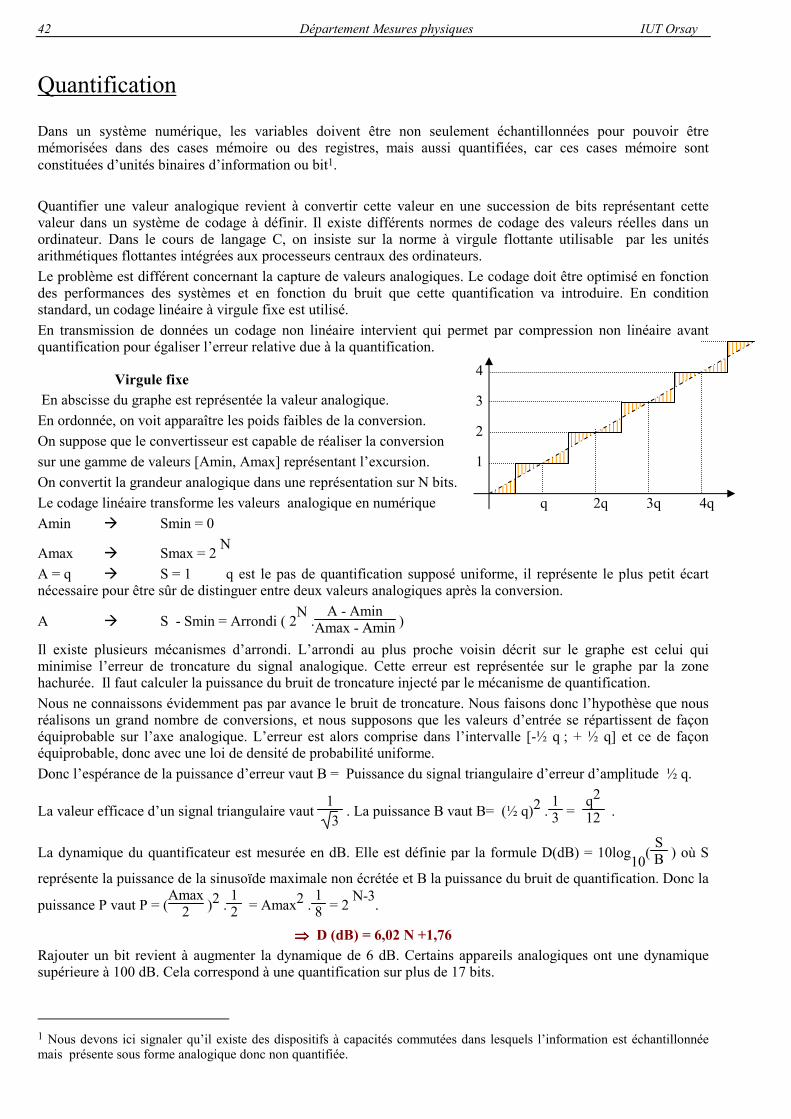
Échantillonnage en fréquence L'emploi d'un ordinateur numérique impose d'effectuer un échantillonnage aussi dans le domaine des fréquences. On s'intéresse alors aux échantillons de fréquences constitués à partir des fréquences multiples entiers de la fréquence de base Fmin. On pourra alors exprimer X(ν) dans un ordinateur numérique à l'aide de la série {X(k.Fmin)}.
Sachant que finalement, la représentation numérique {xn} du signal continu x(t) ne représente correctement le signal que dans la gamme de fréquence [-½ Fe;+ ½ Fe], il faut choisir Fmin de telle façon qu'un certain nombre de multiple de Fmin couvre correctement cette gamme de fréquence. Habituellement, si la Transformée de Fourrier Directe est réalisée sur M points, le spectre est fourni sur le même nombre M de points. En conséquence Fmin vaut habituellement Fe/M, mais peut prendre d'autres valeurs.
Fe2
Fe2
-
ν
1234567891011 13
1412-4-3 -1
0-2-8-7 -5-6-12
-11 -9-10-16
-15 -13-14
15
Fmin = Min || f || f≠0
La représentation précédente est réalisée à partir de 32 échantillons du spectre, multiple entier de la fréquence Fmin. Or il y a équivalence entre échantillonnage dans l'espace des temps (respectivement l'espace des fréquences) et périodisation dans l'espace des fréquences (respectivement l'espace des temps). En conséquence, la représentation en temps du signal échantillonné en fréquence est un signal périodique de période 1
Fmin = M•Te = Horizon d’observation, si on a choisi Fmin = Fe/M.
Ce signal n'est donc pas identique au signal originel sur tout l'espace, mais seulement sur les M points qui ont servi à calculer la TFD correspondant à l'horizon d'observation. Le signal est donc implicitement considéré comme périodique de période égale à l'horizon. Par exemple, nous avons un signal connu sur 1000 échantillons qui ne possède pas de périodicité propre. Nous voulons échantillonner aussi la représentation en
fréquence de ce signal. Pour que cette représentation soit correcte, il faut prendre Fmin = Fe1000. Dans un cas
contraire, par exemple pour Fmin = Fe100, l'échantillonnage en fréquence à la fréquence Fmin introduit une
périodicité dans la représentation du signal temporel (reconstruit par transformée de Fourrier inverse) tous les 100 échantillons.
Dans le cas standard (Fmin = Fe/1000), le fait de supposer le signal comme périodique avec une période égale à l'horizon introduit un artefact dans le calcul de la transformée de Fourier, artefact appelé phénomène de Gibbs. En effet, si la valeur initiale est différente de la valeur finale sur l'horizon temporel, la transformée considère qu'il y a discontinuité et injecte alors des fréquences pour représenter cette discontinuité. Le mécanisme pour s'affranchir de cet artefact est de multiplier le signal temporel par une fenêtre qui tend vers zéro sur les deux bords de l'horizon temporel. Ce mécanisme s'appelle filtrage temporel car il modifie le spectre du signal résultant. Il existe dans la littérature technique un grand nombre de fenêtres adaptés à divers contextes de signaux et de mesureS
42 Département Mesures physiques IUT Orsay
Quantification
Dans un système numérique, les variables doivent être non seulement échantillonnées pour pouvoir être mémorisées dans des cases mémoire ou des registres, mais aussi quantifiées, car ces cases mémoire sont constituées d’unités binaires d’information ou bit1.
Quantifier une valeur analogique revient à convertir cette valeur en une succession de bits représentant cette valeur dans un système de codage à définir. Il existe différents normes de codage des valeurs réelles dans un ordinateur. Dans le cours de langage C, on insiste sur la norme à virgule flottante utilisable par les unités arithmétiques flottantes intégrées aux processeurs centraux des ordinateurs.
Le problème est différent concernant la capture de valeurs analogiques. Le codage doit être optimisé en fonction des performances des systèmes et en fonction du bruit que cette quantification va introduire. En condition standard, un codage linéaire à virgule fixe est utilisé.
En transmission de données un codage non linéaire intervient qui permet par compression non linéaire avant quantification pour égaliser l’erreur relative due à la quantification.
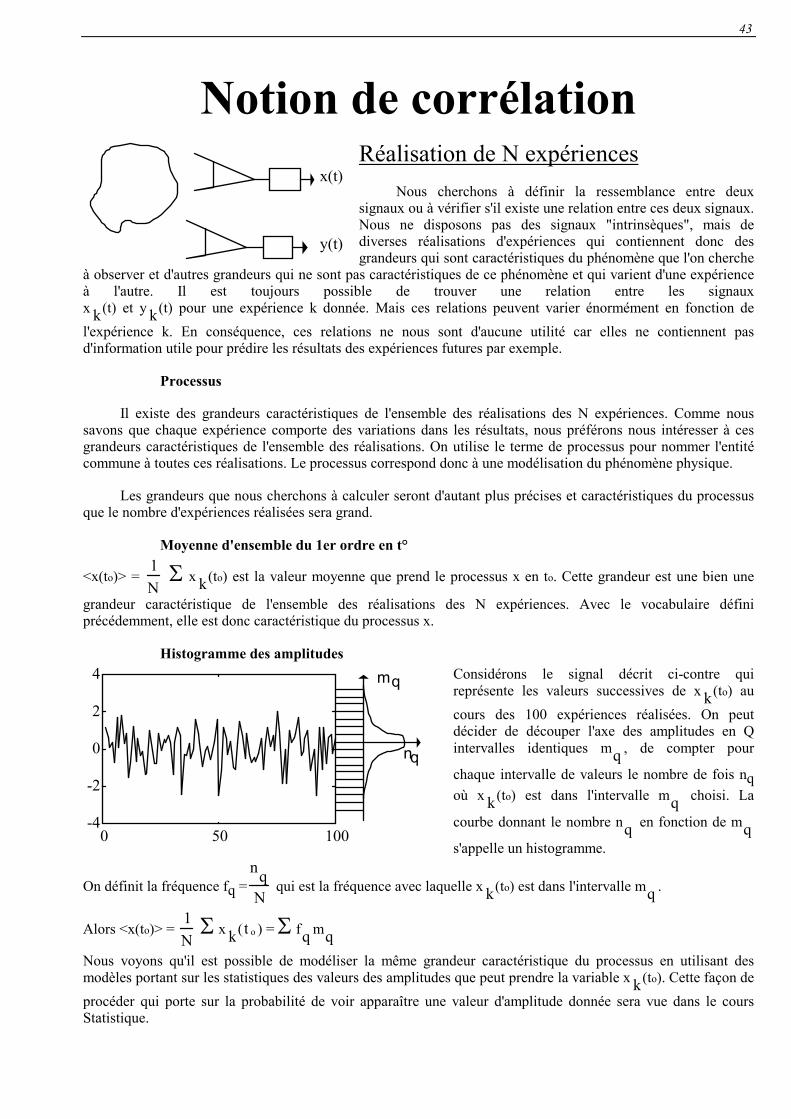
Virgule fixe
En abscisse du graphe est représentée la valeur analogique.
En ordonnée, on voit apparaître les poids faibles de la conversion.
On suppose que le convertisseur est capable de réaliser la conversion
sur une gamme de valeurs [Amin, Amax] représentant l’excursion.
On convertit la grandeur analogique dans une représentation sur N bits.
Le codage linéaire transforme les valeurs analogique en numérique
Amin � Smin = 0
Amax � Smax = 2 N
A = q � S = 1 q est le pas de quantification supposé uniforme, il représente le plus petit écart nécessaire pour être sûr de distinguer entre deux valeurs analogiques après la conversion.
A � S - Smin = Arrondi ( 2N .A - Amin
Amax - Amin )
Il existe plusieurs mécanismes d’arrondi. L’arrondi au plus proche voisin décrit sur le graphe est celui qui minimise l’erreur de troncature du signal analogique. Cette erreur est représentée sur le graphe par la zone hachurée. Il faut calculer la puissance du bruit de troncature injecté par le mécanisme de quantification.
Nous ne connaissons évidemment pas par avance le bruit de troncature. Nous faisons donc l’hypothèse que nous réalisons un grand nombre de conversions, et nous supposons que les valeurs d’entrée se répartissent de façon équiprobable sur l’axe analogique. L’erreur est alors comprise dans l’intervalle [-½ q ; + ½ q] et ce de façon équiprobable, donc avec une loi de densité de probabilité uniforme.
Donc l’espérance de la puissance d’erreur vaut B = Puissance du signal triangulaire d’erreur d’amplitude ½ q.
La valeur efficace d’un signal triangulaire vaut 1 3
. La puissance B vaut B= (½ q)2 .1 3 =
q2
12 .
La dynamique du quantificateur est mesurée en dB. Elle est définie par la formule D(dB) = 10log10(S B ) où S
représente la puissance de la sinusoïde maximale non écrétée et B la puissance du bruit de quantification. Donc la
puissance P vaut P = (Amax 2 )
2 .1 2 = Amax
2 .1 8 = 2
N-3.
⇒⇒⇒⇒ D (dB) = 6,02 N +1,76
Rajouter un bit revient à augmenter la dynamique de 6 dB. Certains appareils analogiques ont une dynamique supérieure à 100 dB. Cela correspond à une quantification sur plus de 17 bits.
1 Nous devons ici signaler qu’il existe des dispositifs à capacités commutées dans lesquels l’information est échantillonnée mais présente sous forme analogique donc non quantifiée.
q 2q 3q 4q
1
2
3
4
43
Notion de corrélation Réalisation de N expériences
Nous cherchons à définir la ressemblance entre deux signaux ou à vérifier s'il existe une relation entre ces deux signaux. Nous ne disposons pas des signaux "intrinsèques", mais de diverses réalisations d'expériences qui contiennent donc des grandeurs qui sont caractéristiques du phénomène que l'on cherche
à observer et d'autres grandeurs qui ne sont pas caractéristiques de ce phénomène et qui varient d'une expérience à l'autre. Il est toujours possible de trouver une relation entre les signaux x k(t) et y k(t) pour une expérience k donnée. Mais ces relations peuvent varier énormément en fonction de
l'expérience k. En conséquence, ces relations ne nous sont d'aucune utilité car elles ne contiennent pas d'information utile pour prédire les résultats des expériences futures par exemple.
Processus
Il existe des grandeurs caractéristiques de l'ensemble des réalisations des N expériences. Comme nous savons que chaque expérience comporte des variations dans les résultats, nous préférons nous intéresser à ces grandeurs caractéristiques de l'ensemble des réalisations. On utilise le terme de processus pour nommer l'entité commune à toutes ces réalisations. Le processus correspond donc à une modélisation du phénomène physique.
Les grandeurs que nous cherchons à calculer seront d'autant plus précises et caractéristiques du processus que le nombre d'expériences réalisées sera grand.
Moyenne d'ensemble du 1er ordre en t°
<x(to)> = 1
N Σ x k(to) est la valeur moyenne que prend le processus x en to. Cette grandeur est une bien une
grandeur caractéristique de l'ensemble des réalisations des N expériences. Avec le vocabulaire défini précédemment, elle est donc caractéristique du processus x.
Histogramme des amplitudes
Considérons le signal décrit ci-contre qui représente les valeurs successives de x k(to) au
cours des 100 expériences réalisées. On peut décider de découper l'axe des amplitudes en Q intervalles identiques mq , de compter pour
chaque intervalle de valeurs le nombre de fois nq où x k(to) est dans l'intervalle mq choisi. La
courbe donnant le nombre nq en fonction de mq
s'appelle un histogramme.
On définit la fréquence fq =nqN qui est la fréquence avec laquelle x k(to) est dans l'intervalle mq .
Alors <x(to)> = 1
N Σ x k( ot ) = Σ fqmq
Nous voyons qu'il est possible de modéliser la même grandeur caractéristique du processus en utilisant des modèles portant sur les statistiques des valeurs des amplitudes que peut prendre la variable x k(to). Cette façon de
procéder qui porte sur la probabilité de voir apparaître une valeur d'amplitude donnée sera vue dans le cours Statistique.
x(t)
y(t)
-4
-2
0
2
4
0 50 100
mq
nq

44 Département Mesures physiques IUT Orsay
Ecart quadratique moyen
Nous revenons au problème initial de comparer les valeurs x k(to) et y k(to) sur un ensemble d'expériences N,
afin de définir le degré de relation entre les 2 processus.
La façon de faire habituelle est de trouver un critère qui soit un bon indicateur du fait que les processus x(to) et y(to) soient en relation. Par exemple, l'écart quadratique moyenne obtenue en comparant en moyenne le processus x(to) et le processus y(to) est un bon indicateur de ressemblance des processus x(to) et y(to). De même, sans connaître à l'avance b, nous pouvons chercher s'il existe une relation de proportionnalité entre les processus x(to) et y(to), ce qui se traduit par l'analyse suivante :
� Nous définissons la fonction z(b, to) = 1
NΣ [x k(to) - b*y k( to)]
2
� Nous posons la notation <[x(to) - b*y(to)]2 > =∆ 1
NΣ [x k(to) - b*y k( to)]
2 comme la moyenne sur
l’ensemble des expériences.
� Dans cette fonction, b est un paramètre initialement inconnu. Le maximum de ressemblance entre les processus en ot sera obtenu pour une valeur de b qui minimise (en moyenne sur l'ensemble des réalisations) la fonction z(b, ot ). Nous voyons apparaître sous le signe somme un écart au carré. Il est en effet important de définir une grandeur qui ait les caractéristiques d'une norme, afin que des écarts positifs et négatifs importants ne puissent se compenser par effet de moyenne, et faire croire ainsi à l'existence d'une relation entre x( ot ) et y( ot ).
� Cette fonction z(b, ot ) est toujours positive ou nulle. Elle admet donc un minimum en fonction du paramètre b. Nous allons calculer ce minimum. Suivant la valeur obtenue, nous pourront dire s'il existe une relation ou s'il n'existe pas de relation entre les processus x( ot ) et y( ot ).
δδb z(b, ot ) = 0 =
δδb [ 1N Σ [x k( ot ) - b*y k( ot )]
2 ]
= δδb [ 1N Σ x k( ot )
2 - 2b
N Σ x k( ot )*y k( ot ) +
2bN Σ y k( ot )
2 ] = -
2
N Σ x k( ot )*y k( ot ) +
2b
N Σ y k( ot )
2
Le minimum est atteint pour b =
1
NΣ x k( ot )*y k( ot )
1
NΣ y k( ot )
2 = =
<x( ot )y( ot )><y( ot )
2 > et vaut alors Zmin
Zmin = [ 1N Σ x k( ot )
2 - 2b
N Σ x k( ot )*y k( ot ) +
2bN Σ y k( ot )
2 ]
= 1
NΣx k( ot )
2 - 2
1
NΣx k( ot )y k( ot )
1
NΣy k( ot )
2 1
NΣx k( ot )y k( ot ) +
[1
NΣ x k( ot )y k( ot )
1
NΣy k( ot )
2 ]2 . 1
NΣy k( ot )
2
= 1
N Σx k( ot )
2 [1 - [ 1N
Σx k( ot )y k( ot )]21
NΣy k( ot )
2 1
N Σ x k( ot )
2 ] = 1
N Σ x k( to)
2 [1 - ρ2 ]
Le terme ρ = <x( ot )y( ot )>
<y( ot )2 ><x( ot )
2 >est toujours de norme inférieure ou égale à 1. Nous dirons que

Traitement du Signal Imprimé le 19/07/11 45
• Lorsque ρ = 1, alors Zmin =0, et nous dirons que la corrélation entre
x(to) et y(to) est parfaite. En d'autre terme, les deux processus sont totalement corrélés.
• Lorsque ρ = −1, alors Zmin =0, nous dirons que la corrélation entre
x(to) et y(to) est parfaite. En d'autre terme, les deux processus sont totalement corrélés, bien qu'en opposition de signe.
• Lorsque ρ = 0, alors Zmin = 1
N Σ x k(to)
2 = <x(to)2 >, et nous
dirons qu'il n'y a pas de corrélation entre x(to) et y(to). En d'autre terme, les deux processus sont décorrélés.
Existence d'une relation à un décalage temporel prés
Le même raisonnement peut être fait lorsque l'on cherche à voir si les processus x(to) et y(to -t1) se ressemblent. Nous allons de la même manière essayer de trouver une relation entre les deux processus en comparant en moyenne sur un grand nombre de réalisations x k(to) et y k(to -t1). Le résultat
passe par le calcul du produit de corrélation défini ci-dessous :
Cxy(to,t1) = n → ∞lim ( 1
N Σ x k( to)*y k( to -t1) ) = <x(to)*y(to -t1)>
Variables centrées et produit de corrélation
x(to) = ˜ x (to) + < x(to) > alors < ˜ x (to) > = 0
y(to) = ˜ y (to) + < y(to) > alors < ˜ y (to) > = 0
L'expression < > est utilisée pour moyenne sur un grand nombre de réalisations. Alors
Cxy(to, t1) = < x(to)*y(to -t1) > = < ( ˜ x (to) + < x(to) >)*( ˜ y (to -t1) + < y(to -t1) >) > = C ˜ x ˜ y ( to, t1) + 0 + 0 + < x(to) >•< y(to -t1) >
Cette relation montre qu'il est judicieux de calculer le produit de corrélation entre les variables centrées plutôt qu'entre les variables non centrées, car il apparaît un terme qui traduit une relation entre les moyennes des processus en question. Or ce terme peut devenir très important et masquer la ressemblance qui existe entre les fluctuations des deux processus autour de leur valeur moyenne.
Signaux stationnaires Les grandeurs caractéristiques du processus sont indépendantes du temps. En particulier :
• valeur moyenne <x( ot )> = <x>.
• Cxx(t1) = C ˜ x ˜ x (t1) + <x>2
• Cxy(t1) = C ˜ x ˜ y (t1) + <x><y>
Relation entre deux processus au travers d'une seule réalisation. Il existe en fait un grand nombre de problèmes où nous ne disposons que d'un nombre limité de réalisations, voire une seule réalisation. Dans ce cas, il n'est pas envisageable de traiter ce problème de la manière décrite précédemment. Par contre, le physicien a accès à l'histoire d'une grandeur sur une durée relativement longue. Il peut donc effectuer sur ces grandeurs des moyennes temporelles, le problème se pose alors de savoir si les résultats obtenus à partir des moyennes temporelles à la même signification que les résultats obtenus à partir de moyenne sur un grand nombre de réalisations ponctuelles.
y
x
Pente b
++ ++ ++ ++
+++ + + +
++
++
+
y
x
Pente b
++
+
+
+
++
+++
+ + + +++++
+

46 Département Mesures physiques IUT Orsay
Ergodicité
Un processus qui jouit de cette équivalence entre moyenne temporelle et moyenne d'ensemble est dit ergodique. L'importance capitale de cette hypothèse provient du fait que dans la quasi-totalité des problèmes de mesures, on sera dans l'obligation de considérer des moyennes temporelles et non des moyennes d'ensemble.
Moyenne temporelle x(t) = 1
T t °
t °+T
∫ x(t) dt
Covariance x(t)•y(t) = 1
T t °
t °+T
∫ x(t)•y(t) dt
Variance x(t)•x(t) = 1
T t °
t °+T
∫ x(t) 2 dt = σσσσx2
Écart type σσσσx
Écart quadratique moyen z(b,t)= x(t) - b•y(t)
Nous cherchons à minimiser la fonction z(b,t) en fonction du paramètre b pour découvrir s'il existe une relation entre x(t) et y(t). Les mêmes techniques s'appliquent alors sur les moyennes temporelles, ce qui nous donne :
b = x(t)•y(t)
y(t)2 Zmin = x(t)2 [1 - x(t)•y(t) 2
x(t)2 • y(t)2 ]= x(t)2 [1 - ρ2 ]
Le terme ρ est toujours de norme inférieure ou égale à 1. Nous dirons que
• Lorsque ρ = 1, alors Zmin =0, et nous dirons que la corrélation entre x(t) et y(t) est parfaite. En d'autre terme,
les deux processus sont totalement corrélés.
• Lorsque ρ = 0, alors Zmin = x(t)2 , et nous dirons qu'il n'y a pas de corrélation entre x(t) et y(t). En d'autre
terme, les deux processus sont decorrélés.
Recherche d'une relation à un décalage temporel près.
Les résultats se conduisent de la même façon et nous montrons que la différence se situe uniquement à l'intérieur
du terme ρ par la présence de Cxy(τ) au lieu de Cxy(0), avec Cxy défini ci-dessous.
Cxy(τ) = x(t)•y(t-τ) =T→ ∞lim
1
T t °
t °+T
∫ x(t)•y(t-τ) dt
Autocorrélation Cxx(ττττ) Cette fonction traduit une relation entre le signal présent et ce qui s'est passé avant. On peut montrer que cela correspond à une notion de mémorisation interne sur le processus. Si le processus est stationnaire, on a le droit d'utiliser la relation découverte entre le présent et le passé du signal pour prédire l'avenir de ce signal.
Traitement du Signal Imprimé le 19/07/11 47
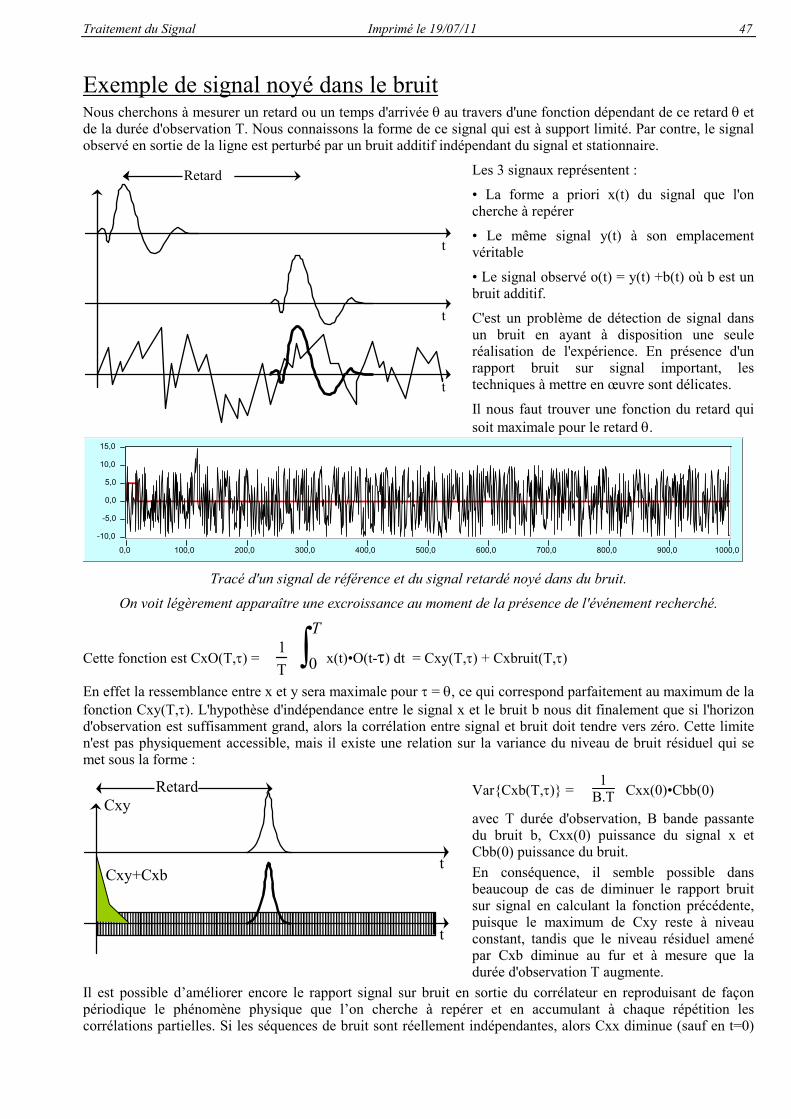
Exemple de signal noyé dans le bruit Nous cherchons à mesurer un retard ou un temps d'arrivée θ au travers d'une fonction dépendant de ce retard θ et de la durée d'observation T. Nous connaissons la forme de ce signal qui est à support limité. Par contre, le signal observé en sortie de la ligne est perturbé par un bruit additif indépendant du signal et stationnaire.
Les 3 signaux représentent :
• La forme a priori x(t) du signal que l'on cherche à repérer
• Le même signal y(t) à son emplacement véritable
• Le signal observé o(t) = y(t) +b(t) où b est un bruit additif.
C'est un problème de détection de signal dans un bruit en ayant à disposition une seule réalisation de l'expérience. En présence d'un rapport bruit sur signal important, les techniques à mettre en œuvre sont délicates.
Il nous faut trouver une fonction du retard qui soit maximale pour le retard θ.
Tracé d'un signal de référence et du signal retardé noyé dans du bruit.
On voit légèrement apparaître une excroissance au moment de la présence de l'événement recherché.
Cette fonction est CxO(T,τ) = 1
T 0
T
∫ x(t)•O(t-τ) dt = Cxy(T,τ) + Cxbruit(T,τ)
En effet la ressemblance entre x et y sera maximale pour τ = θ, ce qui correspond parfaitement au maximum de la fonction Cxy(T,τ). L'hypothèse d'indépendance entre le signal x et le bruit b nous dit finalement que si l'horizon d'observation est suffisamment grand, alors la corrélation entre signal et bruit doit tendre vers zéro. Cette limite n'est pas physiquement accessible, mais il existe une relation sur la variance du niveau de bruit résiduel qui se met sous la forme :
Var{Cxb(T,τ)} = 1B.T Cxx(0)•Cbb(0)
avec T durée d'observation, B bande passante du bruit b, Cxx(0) puissance du signal x et Cbb(0) puissance du bruit.
En conséquence, il semble possible dans beaucoup de cas de diminuer le rapport bruit sur signal en calculant la fonction précédente, puisque le maximum de Cxy reste à niveau constant, tandis que le niveau résiduel amené par Cxb diminue au fur et à mesure que la durée d'observation T augmente.
Il est possible d’améliorer encore le rapport signal sur bruit en sortie du corrélateur en reproduisant de façon périodique le phénomène physique que l’on cherche à repérer et en accumulant à chaque répétition les corrélations partielles. Si les séquences de bruit sont réellement indépendantes, alors Cxx diminue (sauf en t=0)
t
t
t
Retard
t
t
RetardCxy
Cxy+Cxb
15,0
-10,0
-5,0
0,0
5,0
10,0
1000,00,0 100,0 200,0 300,0 400,0 500,0 600,0 700,0 800,0 900,0
48 Département Mesures physiques IUT Orsay
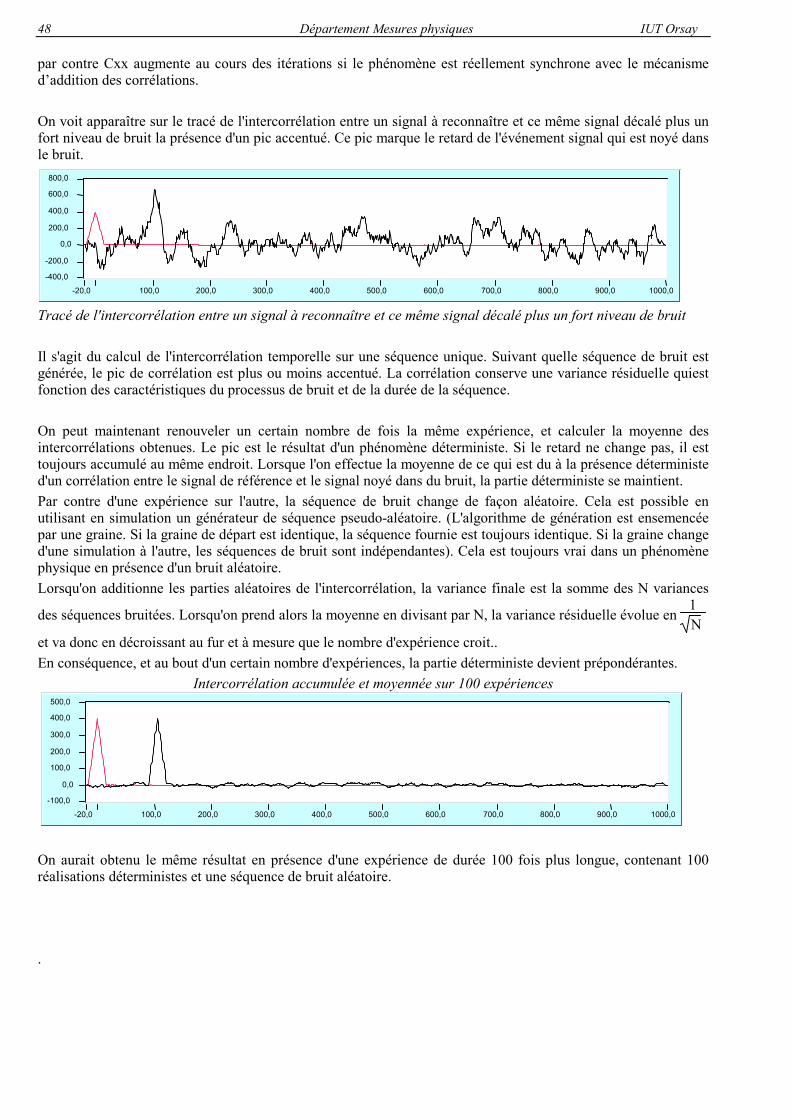
par contre Cxx augmente au cours des itérations si le phénomène est réellement synchrone avec le mécanisme d’addition des corrélations.
On voit apparaître sur le tracé de l'intercorrélation entre un signal à reconnaître et ce même signal décalé plus un fort niveau de bruit la présence d'un pic accentué. Ce pic marque le retard de l'événement signal qui est noyé dans le bruit.
Tracé de l'intercorrélation entre un signal à reconnaître et ce même signal décalé plus un fort niveau de bruit
Il s'agit du calcul de l'intercorrélation temporelle sur une séquence unique. Suivant quelle séquence de bruit est générée, le pic de corrélation est plus ou moins accentué. La corrélation conserve une variance résiduelle quiest fonction des caractéristiques du processus de bruit et de la durée de la séquence.
On peut maintenant renouveler un certain nombre de fois la même expérience, et calculer la moyenne des intercorrélations obtenues. Le pic est le résultat d'un phénomène déterministe. Si le retard ne change pas, il est toujours accumulé au même endroit. Lorsque l'on effectue la moyenne de ce qui est du à la présence déterministe d'un corrélation entre le signal de référence et le signal noyé dans du bruit, la partie déterministe se maintient.
Par contre d'une expérience sur l'autre, la séquence de bruit change de façon aléatoire. Cela est possible en utilisant en simulation un générateur de séquence pseudo-aléatoire. (L'algorithme de génération est ensemencée par une graine. Si la graine de départ est identique, la séquence fournie est toujours identique. Si la graine change d'une simulation à l'autre, les séquences de bruit sont indépendantes). Cela est toujours vrai dans un phénomène physique en présence d'un bruit aléatoire.
Lorsqu'on additionne les parties aléatoires de l'intercorrélation, la variance finale est la somme des N variances
des séquences bruitées. Lorsqu'on prend alors la moyenne en divisant par N, la variance résiduelle évolue en 1N
et va donc en décroissant au fur et à mesure que le nombre d'expérience croit..
En conséquence, et au bout d'un certain nombre d'expériences, la partie déterministe devient prépondérantes.
Intercorrélation accumulée et moyennée sur 100 expériences
On aurait obtenu le même résultat en présence d'une expérience de durée 100 fois plus longue, contenant 100 réalisations déterministes et une séquence de bruit aléatoire.
.
800,0
-400,0
-200,0
0,0
200,0
400,0
600,0
1000,0-20,0 100,0 200,0 300,0 400,0 500,0 600,0 700,0 800,0 900,0
500,0
-100,0
0,0
100,0
200,0
300,0
400,0
1000,0-20,0 100,0 200,0 300,0 400,0 500,0 600,0 700,0 800,0 900,0
49
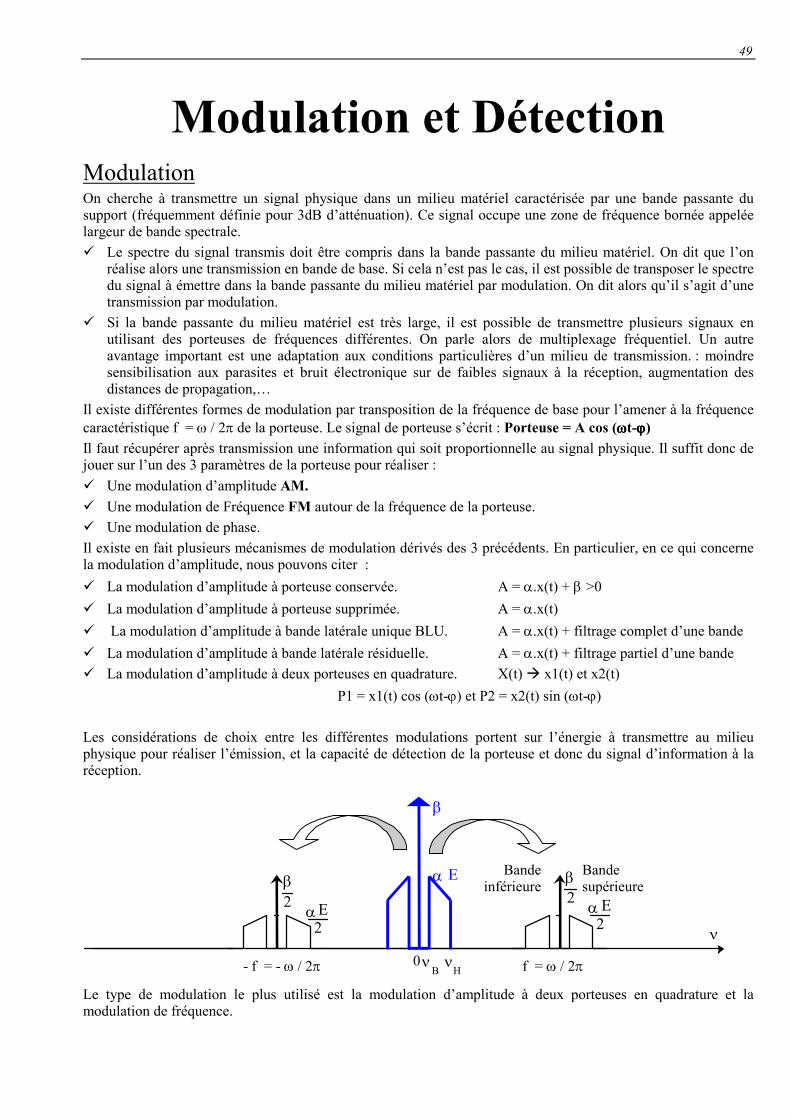
Modulation et Détection Modulation On cherche à transmettre un signal physique dans un milieu matériel caractérisée par une bande passante du support (fréquemment définie pour 3dB d’atténuation). Ce signal occupe une zone de fréquence bornée appelée largeur de bande spectrale.
� Le spectre du signal transmis doit être compris dans la bande passante du milieu matériel. On dit que l’on réalise alors une transmission en bande de base. Si cela n’est pas le cas, il est possible de transposer le spectre du signal à émettre dans la bande passante du milieu matériel par modulation. On dit alors qu’il s’agit d’une transmission par modulation.
� Si la bande passante du milieu matériel est très large, il est possible de transmettre plusieurs signaux en utilisant des porteuses de fréquences différentes. On parle alors de multiplexage fréquentiel. Un autre avantage important est une adaptation aux conditions particulières d’un milieu de transmission. : moindre sensibilisation aux parasites et bruit électronique sur de faibles signaux à la réception, augmentation des distances de propagation,…
Il existe différentes formes de modulation par transposition de la fréquence de base pour l’amener à la fréquence caractéristique f = ω / 2π de la porteuse. Le signal de porteuse s’écrit : Porteuse = A cos (ωωωωt-ϕϕϕϕ) Il faut récupérer après transmission une information qui soit proportionnelle au signal physique. Il suffit donc de jouer sur l’un des 3 paramètres de la porteuse pour réaliser :
� Une modulation d’amplitude AM.
� Une modulation de Fréquence FM autour de la fréquence de la porteuse.
� Une modulation de phase.
Il existe en fait plusieurs mécanismes de modulation dérivés des 3 précédents. En particulier, en ce qui concerne la modulation d’amplitude, nous pouvons citer :
� La modulation d’amplitude à porteuse conservée. A = α.x(t) + β >0 � La modulation d’amplitude à porteuse supprimée. A = α.x(t) � La modulation d’amplitude à bande latérale unique BLU. A = α.x(t) + filtrage complet d’une bande � La modulation d’amplitude à bande latérale résiduelle. A = α.x(t) + filtrage partiel d’une bande � La modulation d’amplitude à deux porteuses en quadrature. X(t) � x1(t) et x2(t)
P1 = x1(t) cos (ωt-ϕ) et P2 = x2(t) sin (ωt-ϕ)
Les considérations de choix entre les différentes modulations portent sur l’énergie à transmettre au milieu physique pour réaliser l’émission, et la capacité de détection de la porteuse et donc du signal d’information à la réception.
Eα
β
ν
2
2Eα
β2
2
0 ννB H
β
Eα
Le type de modulation le plus utilisé est la modulation d’amplitude à deux porteuses en quadrature et la modulation de fréquence.
Bande inférieure
Bande supérieure
f = ω / 2π - f = - ω / 2π
50 Département Mesures Physiques - IUT Orsay
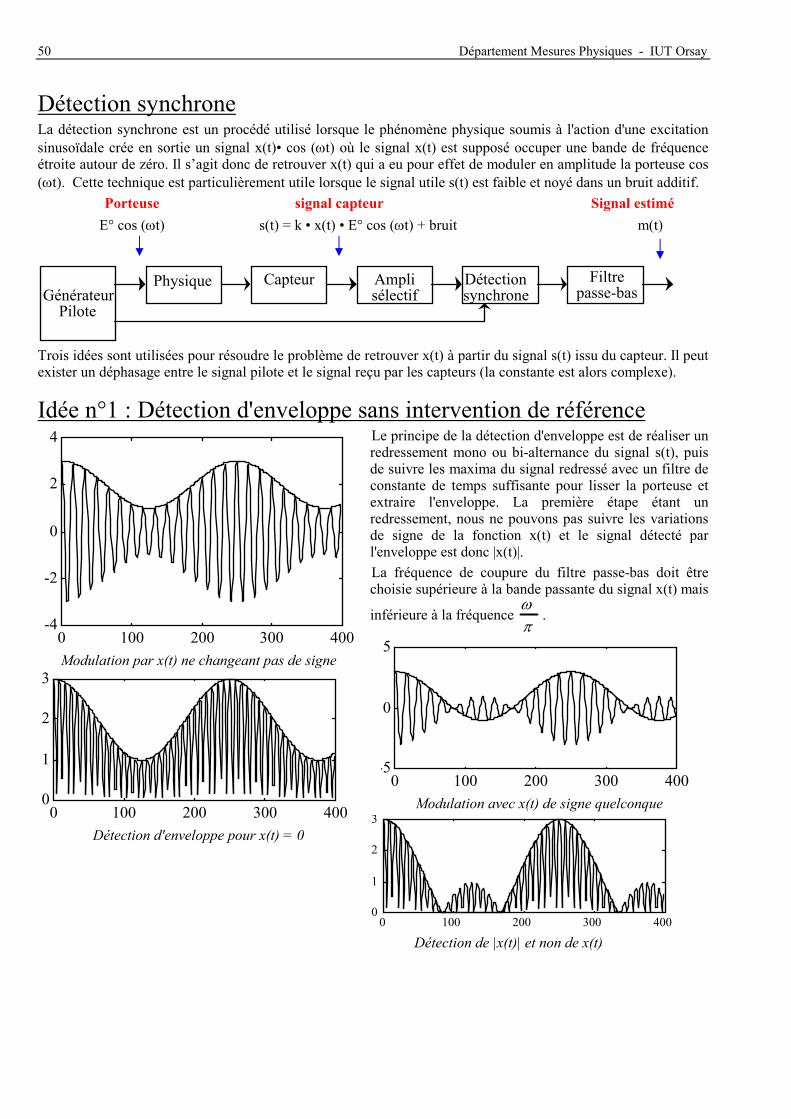
Détection synchrone La détection synchrone est un procédé utilisé lorsque le phénomène physique soumis à l'action d'une excitation sinusoïdale crée en sortie un signal x(t)• cos (ωt) où le signal x(t) est supposé occuper une bande de fréquence étroite autour de zéro. Il s’agit donc de retrouver x(t) qui a eu pour effet de moduler en amplitude la porteuse cos (ωt). Cette technique est particulièrement utile lorsque le signal utile s(t) est faible et noyé dans un bruit additif. Porteuse signal capteur Signal estimé
E° cos (ωt) s(t) = k • x(t) • E° cos (ωt) + bruit m(t)
Générateur Pilote
Physique Capteur Ampli sélectif
Détection synchrone
Filtre passe-bas
Trois idées sont utilisées pour résoudre le problème de retrouver x(t) à partir du signal s(t) issu du capteur. Il peut exister un déphasage entre le signal pilote et le signal reçu par les capteurs (la constante est alors complexe).
Idée n°1 : Détection d'enveloppe sans intervention de référence Le principe de la détection d'enveloppe est de réaliser un redressement mono ou bi-alternance du signal s(t), puis de suivre les maxima du signal redressé avec un filtre de constante de temps suffisante pour lisser la porteuse et extraire l'enveloppe. La première étape étant un redressement, nous ne pouvons pas suivre les variations de signe de la fonction x(t) et le signal détecté par l'enveloppe est donc |x(t)|.
La fréquence de coupure du filtre passe-bas doit être choisie supérieure à la bande passante du signal x(t) mais
inférieure à la fréquence ωπ
.
-5
0
5
0 100 200 300 400 Modulation avec x(t) de signe quelconque
0
1
2
3
0 100 200 300 400 Détection de |x(t)| et non de x(t)
-4
-2
0
2
4
0 100 200 300 400 Modulation par x(t) ne changeant pas de signe
0
1
2
3
0 100 200 300 400 Détection d'enveloppe pour x(t) = 0
Traitement du signal 19/07/11 51
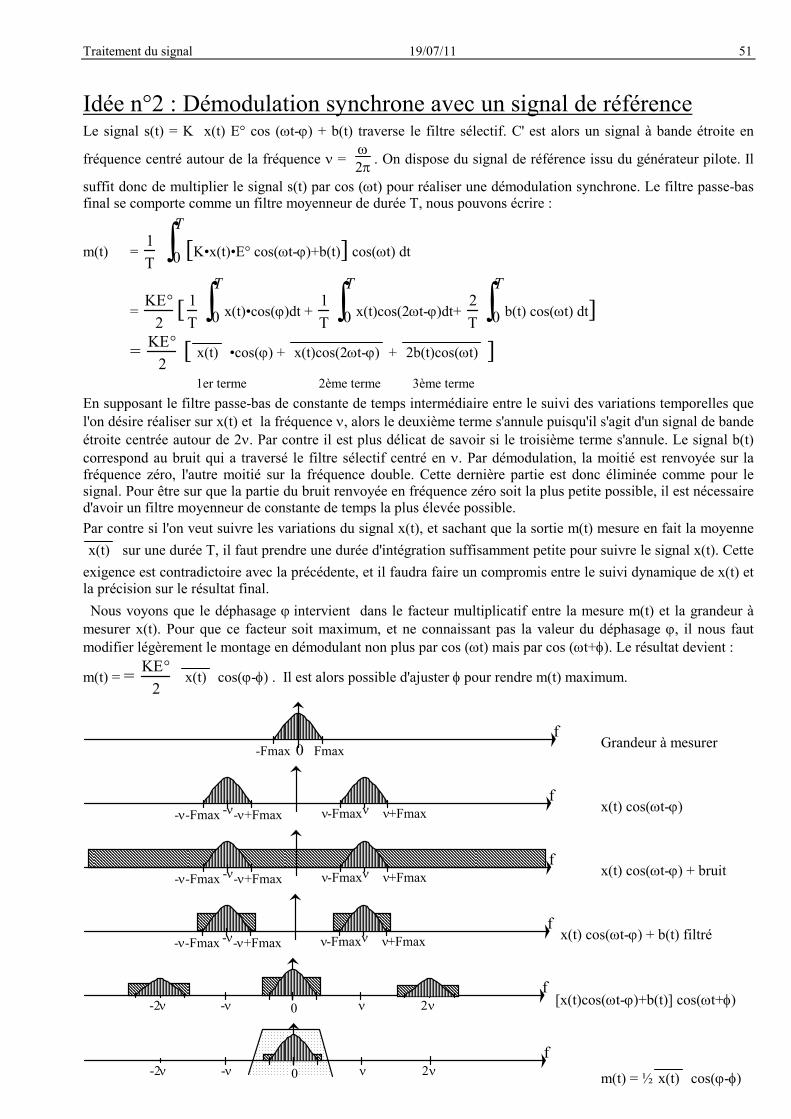
Idée n°2 : Démodulation synchrone avec un signal de référence Le signal s(t) = K x(t) E° cos (ωt-ϕ) + b(t) traverse le filtre sélectif. C' est alors un signal à bande étroite en
fréquence centré autour de la fréquence ν = ω2π . On dispose du signal de référence issu du générateur pilote. Il
suffit donc de multiplier le signal s(t) par cos (ωt) pour réaliser une démodulation synchrone. Le filtre passe-bas final se comporte comme un filtre moyenneur de durée T, nous pouvons écrire :
m(t) = 1
T 0
T
∫ [K•x(t)•E° cos(ωt-ϕ)+b(t)] cos(ωt) dt =
KE°2[ 1T 0
T
∫ x(t)•cos(ϕ)dt + 1
T 0
T
∫ x(t)cos(2ωt-ϕ)dt+ 2
T 0
T
∫ b(t) cos(ωt) dt]
= KE°2
[ x(t) •cos(ϕ) + x(t)cos(2ωt-ϕ) + 2b(t)cos(ωt) ] 1er terme 2ème terme 3ème terme
En supposant le filtre passe-bas de constante de temps intermédiaire entre le suivi des variations temporelles que l'on désire réaliser sur x(t) et la fréquence ν, alors le deuxième terme s'annule puisqu'il s'agit d'un signal de bande étroite centrée autour de 2ν. Par contre il est plus délicat de savoir si le troisième terme s'annule. Le signal b(t) correspond au bruit qui a traversé le filtre sélectif centré en ν. Par démodulation, la moitié est renvoyée sur la fréquence zéro, l'autre moitié sur la fréquence double. Cette dernière partie est donc éliminée comme pour le signal. Pour être sur que la partie du bruit renvoyée en fréquence zéro soit la plus petite possible, il est nécessaire d'avoir un filtre moyenneur de constante de temps la plus élevée possible.
Par contre si l'on veut suivre les variations du signal x(t), et sachant que la sortie m(t) mesure en fait la moyenne
x(t) sur une durée T, il faut prendre une durée d'intégration suffisamment petite pour suivre le signal x(t). Cette
exigence est contradictoire avec la précédente, et il faudra faire un compromis entre le suivi dynamique de x(t) et la précision sur le résultat final.
Nous voyons que le déphasage ϕ intervient dans le facteur multiplicatif entre la mesure m(t) et la grandeur à mesurer x(t). Pour que ce facteur soit maximum, et ne connaissant pas la valeur du déphasage ϕ, il nous faut modifier légèrement le montage en démodulant non plus par cos (ωt) mais par cos (ωt+φ). Le résultat devient :
m(t) = = KE°2 x(t) cos(ϕ-φ) . Il est alors possible d'ajuster φ pour rendre m(t) maximum.
Fmax0f
-Fmax Grandeur à mesurer
ν+Fmaxνν-Fmax-ν+Fmax-ν-ν-Fmaxf
x(t) cos(ωt-ϕ)
ν+Fmaxνν-Fmax-ν+Fmax-ν-ν-Fmaxf
x(t) cos(ωt-ϕ) + bruit
ν+Fmaxνν-Fmax-ν+Fmax-ν-ν-Fmaxfx(t) cos(ωt-ϕ) + b(t) filtré
ν-νf
0 2ν-2ν [x(t)cos(ωt-ϕ)+b(t)] cos(ωt+φ)
ν-νf
0 2ν-2ν m(t) = ½ x(t) cos(ϕ-φ)
52 Département Mesures Physiques - IUT Orsay
AM H( ν )
ν I I −ν
∆ν v(t) s(t) e (t)
r(t)
⊗
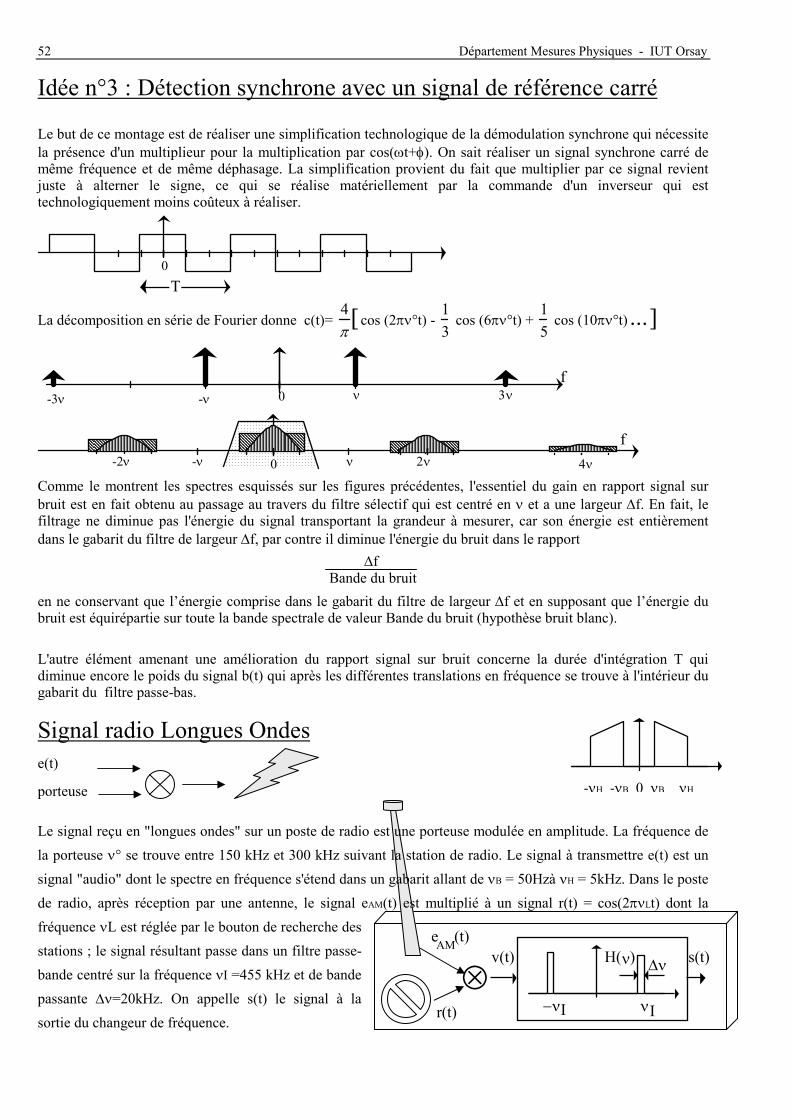
Idée n°3 : Détection synchrone avec un signal de référence carré
Le but de ce montage est de réaliser une simplification technologique de la démodulation synchrone qui nécessite la présence d'un multiplieur pour la multiplication par cos(ωt+φ). On sait réaliser un signal synchrone carré de même fréquence et de même déphasage. La simplification provient du fait que multiplier par ce signal revient juste à alterner le signe, ce qui se réalise matériellement par la commande d'un inverseur qui est technologiquement moins coûteux à réaliser.
0
T
La décomposition en série de Fourier donne c(t)= 4
π[cos (2πν°t) -
1
3 cos (6πν°t) +
1
5 cos (10πν°t) ...]
ν-ν
f0 3ν-3ν
-ν-2ν ν
f
0 2ν 4ν Comme le montrent les spectres esquissés sur les figures précédentes, l'essentiel du gain en rapport signal sur bruit est en fait obtenu au passage au travers du filtre sélectif qui est centré en ν et a une largeur ∆f. En fait, le filtrage ne diminue pas l'énergie du signal transportant la grandeur à mesurer, car son énergie est entièrement dans le gabarit du filtre de largeur ∆f, par contre il diminue l'énergie du bruit dans le rapport
∆f Bande du bruit
en ne conservant que l’énergie comprise dans le gabarit du filtre de largeur ∆f et en supposant que l’énergie du bruit est équirépartie sur toute la bande spectrale de valeur Bande du bruit (hypothèse bruit blanc).
L'autre élément amenant une amélioration du rapport signal sur bruit concerne la durée d'intégration T qui diminue encore le poids du signal b(t) qui après les différentes translations en fréquence se trouve à l'intérieur du gabarit du filtre passe-bas.
Signal radio Longues Ondes e(t)
porteuse
Le signal reçu en "longues ondes" sur un poste de radio est une porteuse modulée en amplitude. La fréquence de
la porteuse ν° se trouve entre 150 kHz et 300 kHz suivant la station de radio. Le signal à transmettre e(t) est un
signal "audio" dont le spectre en fréquence s'étend dans un gabarit allant de νB = 50Hzà νH = 5kHz. Dans le poste
de radio, après réception par une antenne, le signal eAM(t) est multiplié à un signal r(t) = cos(2πνLt) dont la
fréquence νL est réglée par le bouton de recherche des
stations ; le signal résultant passe dans un filtre passe-
bande centré sur la fréquence νΙ =455 kHz et de bande
passante ∆ν=20kHz. On appelle s(t) le signal à la
sortie du changeur de fréquence.
-νH -νB 0 νB νH
Traitement du signal 19/07/11 53
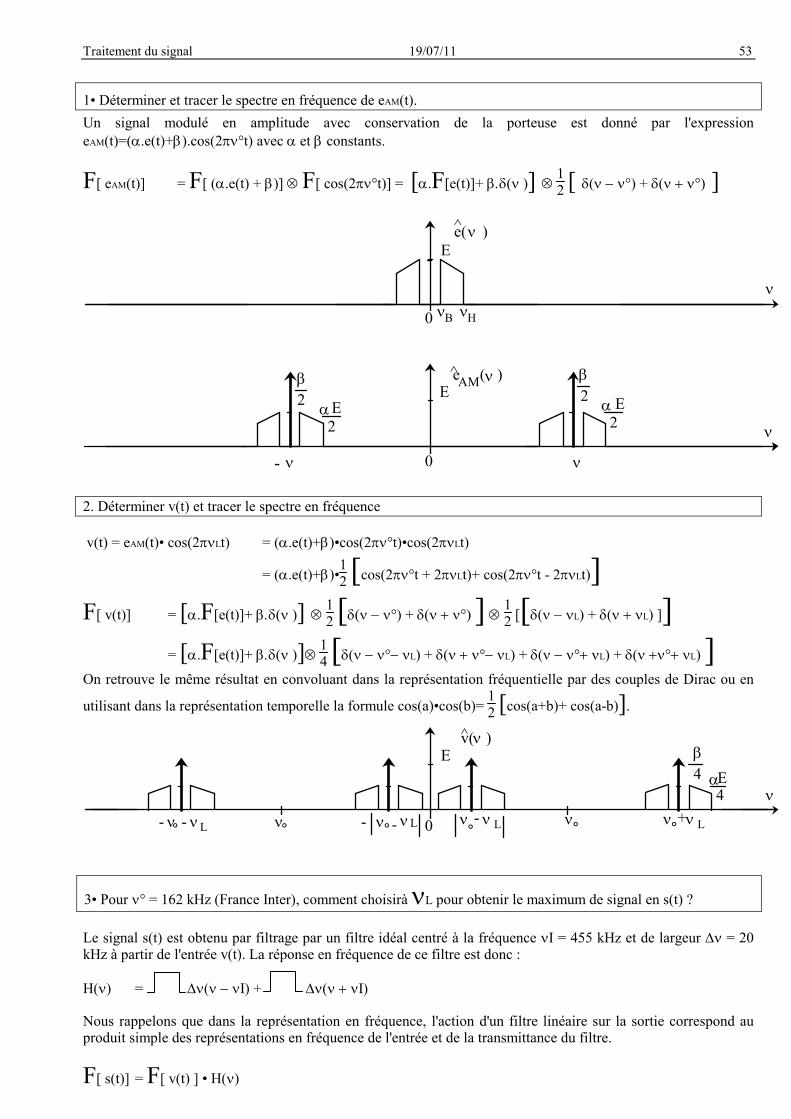
1• Déterminer et tracer le spectre en fréquence de eAM(t).
Un signal modulé en amplitude avec conservation de la porteuse est donné par l'expression eAM(t)=(α.e(t)+β).cos(2πν°t) avec α et β constants.
F[ eAM(t)] = F[ (α.e(t) + β)] ⊗ F[ cos(2πν°t)] = [α.F[e(t)]+ β.δ(ν )] ⊗ 12 [ δ(ν − ν°) + δ(ν + ν°) ]
E
ν
e( )
0 ννB H
^ ν
AME
Eα
β
ν
e ( )
νν 0-
2
2Eα
β2
2
ν^
2. Déterminer v(t) et tracer le spectre en fréquence
v(t) = eAM(t)• cos(2πνLt) = (α.e(t)+β)•cos(2πν°t)•cos(2πνLt)
= (α.e(t)+β)•12 [cos(2πν°t + 2πνLt)+ cos(2πν°t - 2πνLt)]
F[ v(t)] = [α.F[e(t)]+ β.δ(ν )] ⊗ 12 [δ(ν − ν°) + δ(ν + ν°) ] ⊗ 12 [[δ(ν − νL) + δ(ν + νL) ]]
= [α.F[e(t)]+ β.δ(ν )]⊗ 14 [δ(ν − ν°− νL) + δ(ν + ν°− νL) + δ(ν − ν°+ νL) + δ(ν +ν°+ νL) ] On retrouve le même résultat en convoluant dans la représentation fréquentielle par des couples de Dirac ou en
utilisant dans la représentation temporelle la formule cos(a)•cos(b)= 12 [cos(a+b)+ cos(a-b)].
^
ν+-
v( )E
νν0 °
Eα
β
ν°
44
ν ν L ν° Lν ν L--
° °
ν
ν°
Lν --
3• Pour ν° = 162 kHz (France Inter), comment choisirà νL pour obtenir le maximum de signal en s(t) ?
Le signal s(t) est obtenu par filtrage par un filtre idéal centré à la fréquence νI = 455 kHz et de largeur ∆ν = 20 kHz à partir de l'entrée v(t). La réponse en fréquence de ce filtre est donc :
H(ν) = ∆ν(ν − νI) + ∆ν(ν + νI)
Nous rappelons que dans la représentation en fréquence, l'action d'un filtre linéaire sur la sortie correspond au produit simple des représentations en fréquence de l'entrée et de la transmittance du filtre.
F[ s(t)] = F[ v(t) ] • H(ν)
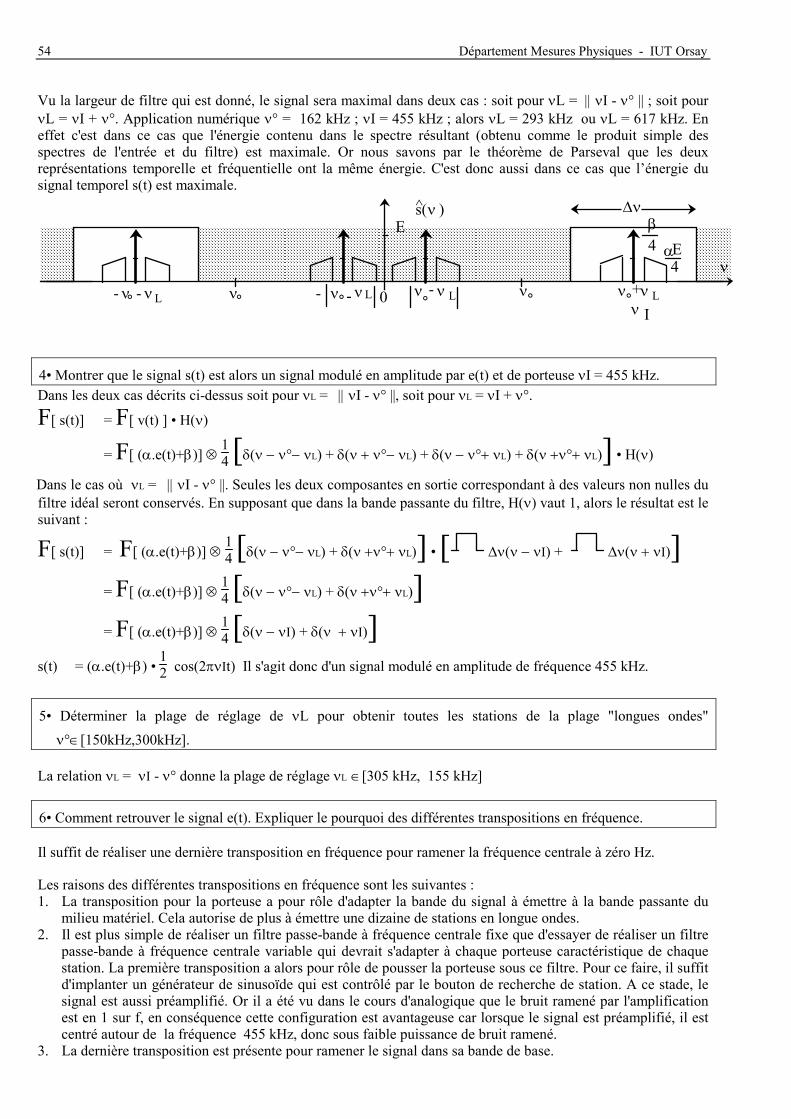
54 Département Mesures Physiques - IUT Orsay
Vu la largeur de filtre qui est donné, le signal sera maximal dans deux cas : soit pour νL = || νI - ν° || ; soit pour νL = νI + ν°. Application numérique ν° = 162 kHz ; νI = 455 kHz ; alors νL = 293 kHz ou νL = 617 kHz. En effet c'est dans ce cas que l'énergie contenu dans le spectre résultant (obtenu comme le produit simple des spectres de l'entrée et du filtre) est maximale. Or nous savons par le théorème de Parseval que les deux représentations temporelle et fréquentielle ont la même énergie. C'est donc aussi dans ce cas que l’énergie du signal temporel s(t) est maximale.
ν+-
s( )E
νν0 °
Eα
β
ν°
44
ν ν L ν° Lν ν L--
° °
∆ν
ν I
ν^
ν°
Lν --
4• Montrer que le signal s(t) est alors un signal modulé en amplitude par e(t) et de porteuse νI = 455 kHz. Dans les deux cas décrits ci-dessus soit pour νL = || νI - ν° ||, soit pour νL = νI + ν°.
F[ s(t)] = F[ v(t) ] • H(ν)
= F[ (α.e(t)+β)] ⊗ 14 [δ(ν − ν°− νL) + δ(ν + ν°− νL) + δ(ν − ν°+ νL) + δ(ν +ν°+ νL)] • H(ν)
Dans le cas où νL = || νI - ν° ||. Seules les deux composantes en sortie correspondant à des valeurs non nulles du filtre idéal seront conservés. En supposant que dans la bande passante du filtre, H(ν) vaut 1, alors le résultat est le suivant :
F[ s(t)] = F[ (α.e(t)+β)] ⊗ 14 [δ(ν − ν°− νL) + δ(ν +ν°+ νL)] • [ ∆ν(ν − νI) + ∆ν(ν + νI)]
= F[ (α.e(t)+β)] ⊗ 14 [δ(ν − ν°− νL) + δ(ν +ν°+ νL)]
= F[ (α.e(t)+β)] ⊗ 14 [δ(ν − νI) + δ(ν + νI)]
s(t) = (α.e(t)+β) • 12 cos(2πνIt) Il s'agit donc d'un signal modulé en amplitude de fréquence 455 kHz.
5• Déterminer la plage de réglage de νL pour obtenir toutes les stations de la plage "longues ondes"
ν°∈[150kHz,300kHz].
La relation νL = νI - ν° donne la plage de réglage νL ∈[305 kHz, 155 kHz]
6• Comment retrouver le signal e(t). Expliquer le pourquoi des différentes transpositions en fréquence.
Il suffit de réaliser une dernière transposition en fréquence pour ramener la fréquence centrale à zéro Hz.
Les raisons des différentes transpositions en fréquence sont les suivantes : 1. La transposition pour la porteuse a pour rôle d'adapter la bande du signal à émettre à la bande passante du
milieu matériel. Cela autorise de plus à émettre une dizaine de stations en longue ondes. 2. Il est plus simple de réaliser un filtre passe-bande à fréquence centrale fixe que d'essayer de réaliser un filtre
passe-bande à fréquence centrale variable qui devrait s'adapter à chaque porteuse caractéristique de chaque station. La première transposition a alors pour rôle de pousser la porteuse sous ce filtre. Pour ce faire, il suffit d'implanter un générateur de sinusoïde qui est contrôlé par le bouton de recherche de station. A ce stade, le signal est aussi préamplifié. Or il a été vu dans le cours d'analogique que le bruit ramené par l'amplification est en 1 sur f, en conséquence cette configuration est avantageuse car lorsque le signal est préamplifié, il est centré autour de la fréquence 455 kHz, donc sous faible puissance de bruit ramené.
3. La dernière transposition est présente pour ramener le signal dans sa bande de base.
55
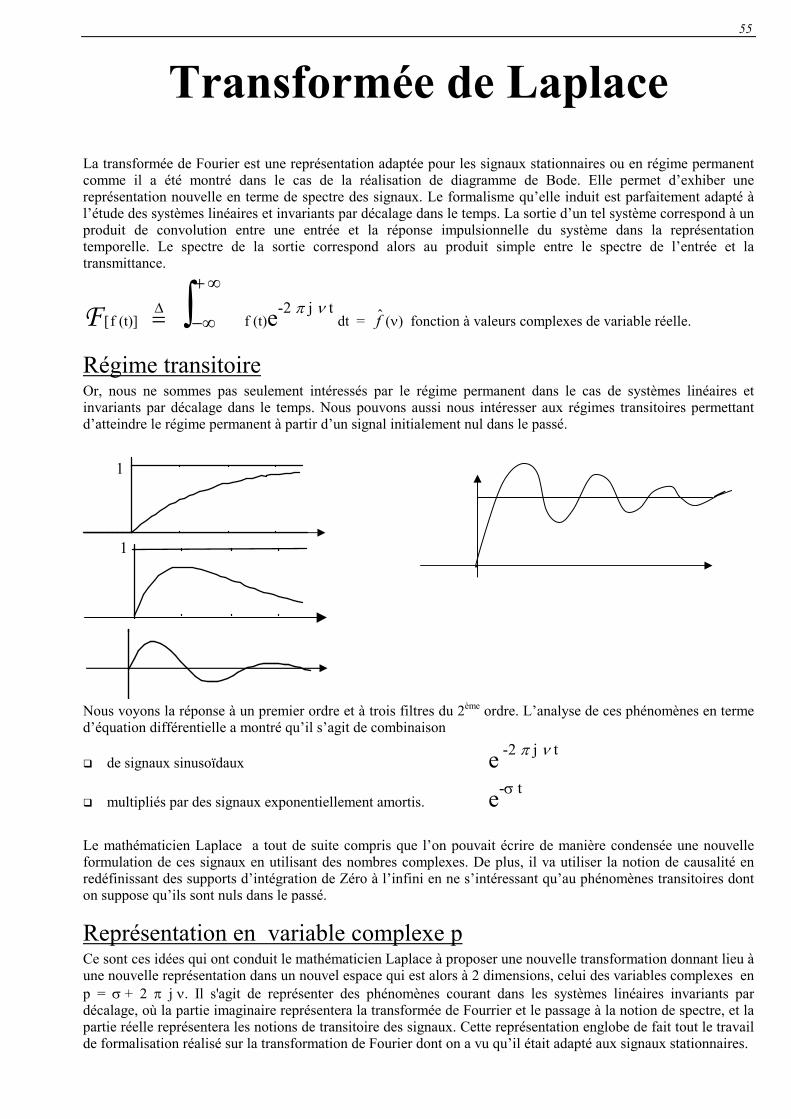
Transformée de Laplace La transformée de Fourier est une représentation adaptée pour les signaux stationnaires ou en régime permanent comme il a été montré dans le cas de la réalisation de diagramme de Bode. Elle permet d’exhiber une représentation nouvelle en terme de spectre des signaux. Le formalisme qu’elle induit est parfaitement adapté à l’étude des systèmes linéaires et invariants par décalage dans le temps. La sortie d’un tel système correspond à un produit de convolution entre une entrée et la réponse impulsionnelle du système dans la représentation temporelle. Le spectre de la sortie correspond alors au produit simple entre le spectre de l’entrée et la transmittance.
F [f (t)] =∆ −∞
+ ∞
∫ f (t)e-2 π j ν tdt = ˆ f (ν) fonction à valeurs complexes de variable réelle.
Régime transitoire Or, nous ne sommes pas seulement intéressés par le régime permanent dans le cas de systèmes linéaires et invariants par décalage dans le temps. Nous pouvons aussi nous intéresser aux régimes transitoires permettant d’atteindre le régime permanent à partir d’un signal initialement nul dans le passé.
1
1
Nous voyons la réponse à un premier ordre et à trois filtres du 2ème ordre. L’analyse de ces phénomènes en terme d’équation différentielle a montré qu’il s’agit de combinaison
� de signaux sinusoïdaux e -2 π j ν t
� multipliés par des signaux exponentiellement amortis. e-σ t
Le mathématicien Laplace a tout de suite compris que l’on pouvait écrire de manière condensée une nouvelle formulation de ces signaux en utilisant des nombres complexes. De plus, il va utiliser la notion de causalité en redéfinissant des supports d’intégration de Zéro à l’infini en ne s’intéressant qu’au phénomènes transitoires dont on suppose qu’ils sont nuls dans le passé.
Représentation en variable complexe p Ce sont ces idées qui ont conduit le mathématicien Laplace à proposer une nouvelle transformation donnant lieu à une nouvelle représentation dans un nouvel espace qui est alors à 2 dimensions, celui des variables complexes en p = σ + 2 π j ν. Il s'agit de représenter des phénomènes courant dans les systèmes linéaires invariants par décalage, où la partie imaginaire représentera la transformée de Fourrier et le passage à la notion de spectre, et la partie réelle représentera les notions de transitoire des signaux. Cette représentation englobe de fait tout le travail de formalisation réalisé sur la transformation de Fourier dont on a vu qu’il était adapté aux signaux stationnaires.
56 Département Mesures Physiques - IUT Orsay
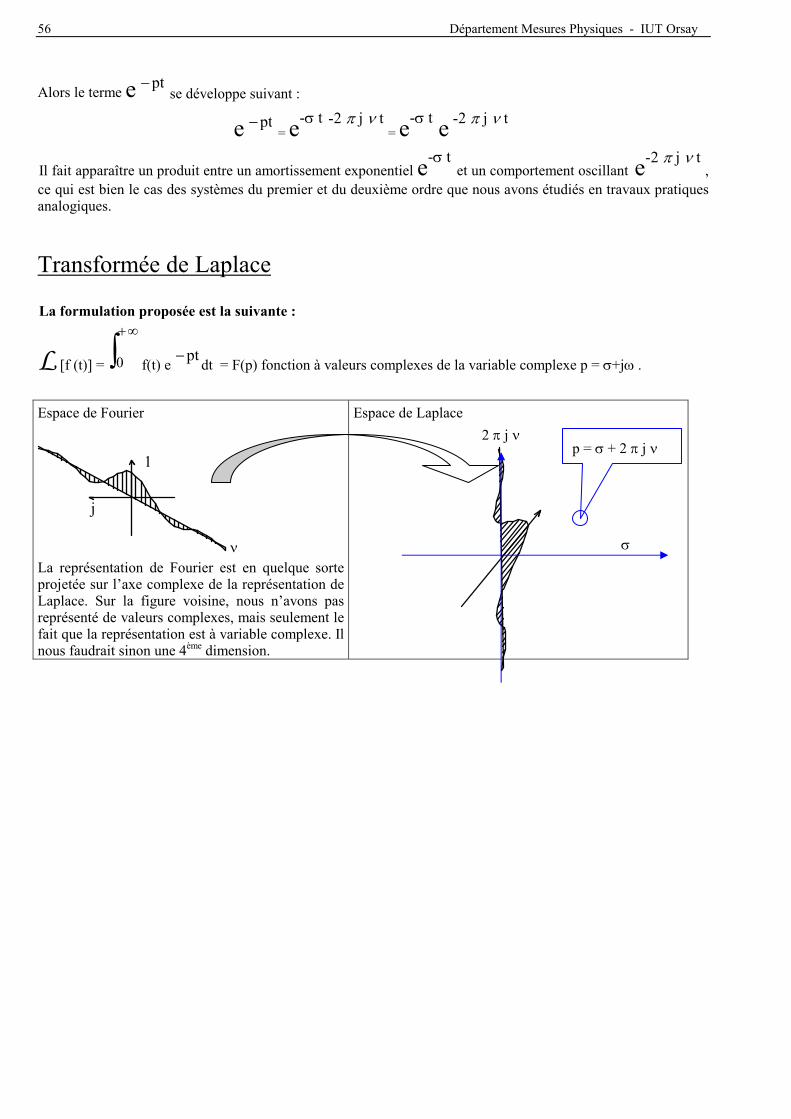
Alors le terme e −pt se développe suivant :
e −pt = e-σ t
-2 π j ν t
= e-σ t
e -2 π j ν t
Il fait apparaître un produit entre un amortissement exponentiel e-σ t
et un comportement oscillant e-2 π j ν t
, ce qui est bien le cas des systèmes du premier et du deuxième ordre que nous avons étudiés en travaux pratiques analogiques.
Transformée de Laplace
La formulation proposée est la suivante :
L [f (t)] = 0
+∞
∫ f(t) e −pt
dt = F(p) fonction à valeurs complexes de la variable complexe p = σ+jω .
Espace de Fourier
1
j
ν La représentation de Fourier est en quelque sorte projetée sur l’axe complexe de la représentation de Laplace. Sur la figure voisine, nous n’avons pas représenté de valeurs complexes, mais seulement le fait que la représentation est à variable complexe. Il nous faudrait sinon une 4ème dimension.
Espace de Laplace
2 π j ν σ
p = σ + 2 π j ν

Traitement du signal- 19/07/11 57
Traitement numérique du Signal
Fonctions continues � Suites numériques
La transformation la plus importante à comprendre est certainement le passage du temps continu au temps discret. Le formidable essor technologique au niveau de la réalisation de circuits numériques rend l’intégration de fonctions numériques de plus en plus attractive dans le domaine industriel.
Or ce passage n’est pas trivial. Comme nous l’avons mentionné au niveau de l’échantillonnage des signaux à temps continus, il est nécessaire de prendre un certain nombre de précautions pour que la suite obtenue après échantillonnage des signaux soit toujours représentative du véritable phénomène physique étudié. Le théorème de Shannon indique par exemple la condition à vérifier pour éviter un phénomène de repliement du spectre du signal après passage dans le monde numérique.
L’utilisation massive de circuits de traitements numériques des signaux a conduit dans un premier temps a réalisé des fonctions (traitements quelconques) et des filtres numériques (correspondant à un produit de convolution dans les temps ou à un produit simple dans les spectres) qui soient analogues et ressemblantes aux traitements et aux filtres connus dans le monde analogique.
Puis , très rapidement, le traitement numérique du signal a été considéré comme une matière de l’ingénieur à part entière ayant ses propres développements au niveau scientifique. Nous aborderons dans ce cours les aspects des traitements numériques proches de ce qu’il est possible de réaliser dans le monde analogique. Mais vous devez savoir que cette matière scientifique a des développements qui vont beaucoup plus loin que la simple imitation du monde analogique, et avec l’essor technologique actuel de l’industrie numérique, le traitement numérique du signal est appelé à des développements encore plus complexes.
Echantillonnage
Fonction à paramètres continus f(t)
Continu → → → → Discret t = n•Te
Formule homogène en temps
Suites numériques
{fn }= {f (n•Te) }
Convolution
Convolution continue
f ⊗g (θ) = 0
+ ∞
∫ f(t) g(θ - t) dt
Continu → → → → Discret θ = k•Te ; t = n•Te Formulation homogène
∑∞+
= 0n
f(nTe) g(kTe-nTe) Te
Convolution discrète
{f ⊗ g} k=∆ ∑
∞+
= 0n
fn •gk-n
Il n'y a plus de référence au temps physique Te dans la définition du produit de convolution discret. La différence entre les tops des temps logiques est devenue 1. Par contre, il est nécessaire de connaître la période d'échantillonnage lorsque l'on retourne au monde physique continu.
58 Département Mesures Physiques - IUT Orsay
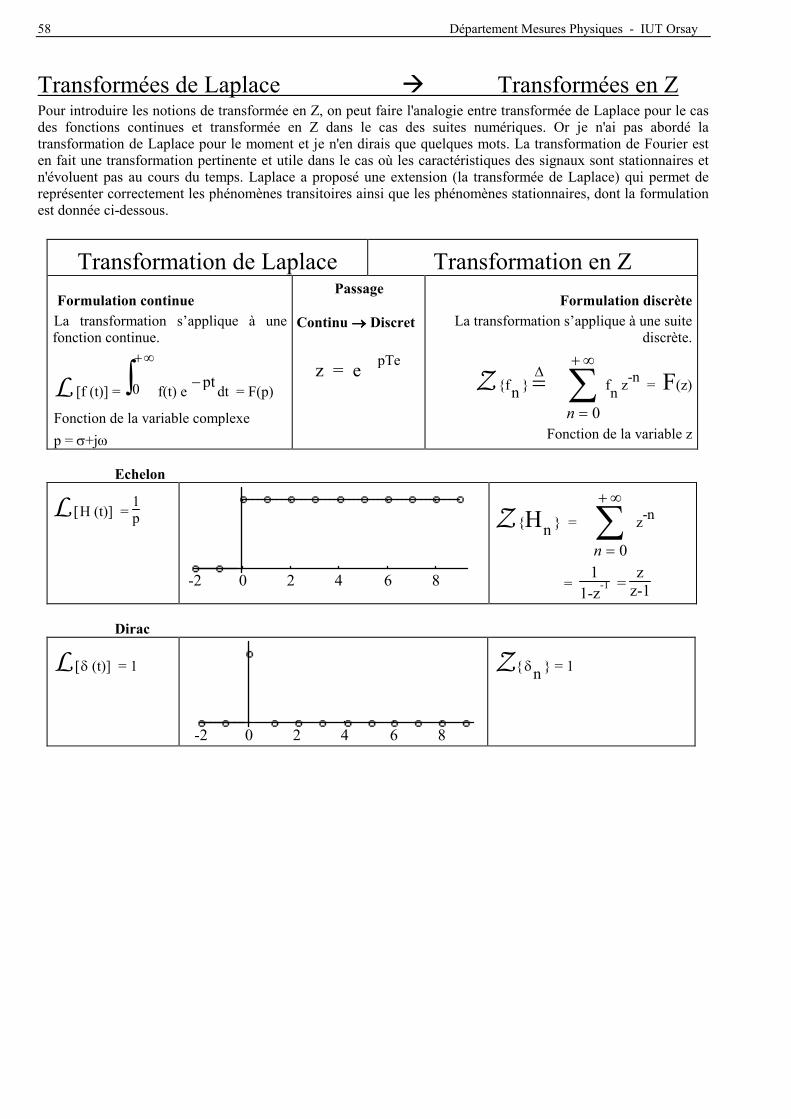
Transformées de Laplace � Transformées en Z Pour introduire les notions de transformée en Z, on peut faire l'analogie entre transformée de Laplace pour le cas des fonctions continues et transformée en Z dans le cas des suites numériques. Or je n'ai pas abordé la transformation de Laplace pour le moment et je n'en dirais que quelques mots. La transformation de Fourier est en fait une transformation pertinente et utile dans le cas où les caractéristiques des signaux sont stationnaires et n'évoluent pas au cours du temps. Laplace a proposé une extension (la transformée de Laplace) qui permet de représenter correctement les phénomènes transitoires ainsi que les phénomènes stationnaires, dont la formulation est donnée ci-dessous.
Transformation de Laplace Transformation en Z
Formulation continue
La transformation s’applique à une fonction continue.
L [f (t)] = 0
+∞
∫ f(t) e −pt
dt = F(p)
Fonction de la variable complexe
p = σ+jω
Passage
Continu → → → → Discret
z = e pTe
Formulation discrète
La transformation s’applique à une suite discrète.
Z {fn } =∆ ∑
∞+
= 0n
fn z-n = F(z)
Fonction de la variable z
Echelon
L [H (t)] = 1p
-2 0 2 4 6 8
Z {Hn } = ∑∞+
= 0n
z-n
= 11-z
-1 = zz-1
Dirac
L [δ (t)] = 1
-2 0 2 4 6 8
Z {δn } = 1

Traitement du signal- 19/07/11 59
Propriétés
Fonctions continues Suites numériques Transformation de Laplace : L Transformation en Z : Z
LLLL et ZZZZ sont des opérateurs linéaires
L [a•f (t) + b•g (t)] = a•L [f (t)] + b•L [g (t)] Z [a•{fn } + b•{gn }] = a•Z {fn } + b•Z {gn }
Dérivation
L [f' (t)] = p L [f (t)] - f(0-)
Intégration
L [ 0
t
∫ f (u)du] = L [ f ⊗ H ] = L[f(t)]
p = F(p)p
Translation dans le temps – retard
L [f (t-τ)] = e−τpL [f (t)] = e−τp F(p) Z {fn − k} = z
−k•Z {fn }
Translation dans le plan complexe
L [e−at f (x)] = L [f (x)] (p+a) = F(p + a)
Convolution
L [ f ⊗ g ] = L [ f ] • L [ g ] Z[{ fn } ⊗{ gn }]= Z {fn }• Z{ gn }
L [ f • g ] = L [ f ] ⊗ L [ g ] Z [ { fn } • { gn } ] = Z {fn } ⊗ Z { gn }
Théorème de la valeur initiale
t→ +0lim f(t) = f(0+) =
p→ ∞lim p F(p) f 0 =
z→ ∞lim Z {fn }(z)
Théorème de la valeur finale
t → ∞lim f(t) =
p→ 0lim p F(p)
n → ∞lim fn =
z→ 1lim (z-1)Z {fn }(z)
•Changement d'échelle Multiplication par an
Z {anfn }(z) = Z {fn }(
z
a)
60 Département Mesures Physiques - IUT Orsay
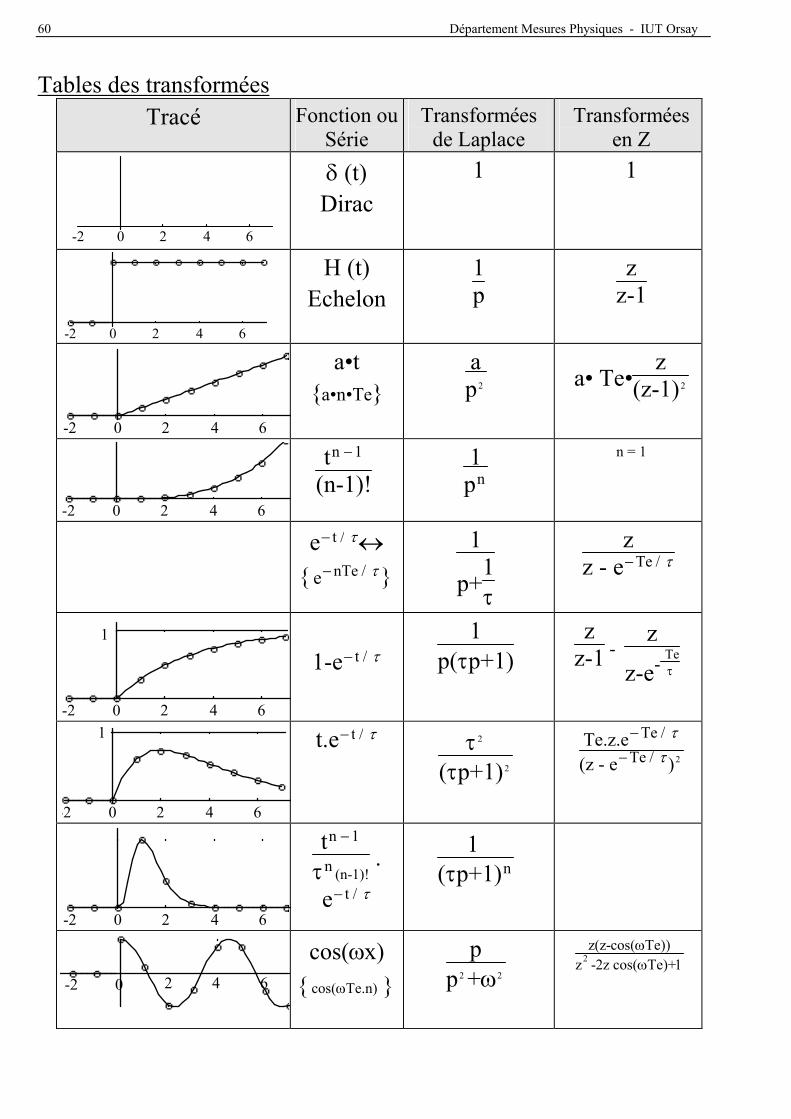
Tables des transformées Tracé Fonction ou
Série Transformées de Laplace
Transformées en Z
-2 0 2 4 6
δ (t) Dirac
1 1
-2 0 2 4 6
H (t) Echelon
1p
zz-1
-2 0 2 4 6
a•t {a•n•Te}
ap2 a• Te•
z(z-1)2
-2 0 2 4 6
tn −1
(n-1)! 1pn
n = 1
e− t / τ↔ {e−nTe / τ}
1
p+1τ
z
z - e−Te / τ
1
-2 0 2 4 6
1-e− t / τ
1p(τp+1)
zz-1 -
z
z-e- Teτ
1
-2 0 2 4 6
t.e− t / τ
τ 2
(τp+1)2 Te.z.e−Te / τ
(z - e−Te / τ )2
-2 0 2 4 6
tn −1
τn (n-1)! .
e− t / τ
1(τp+1)n
-2 0 2 4 6
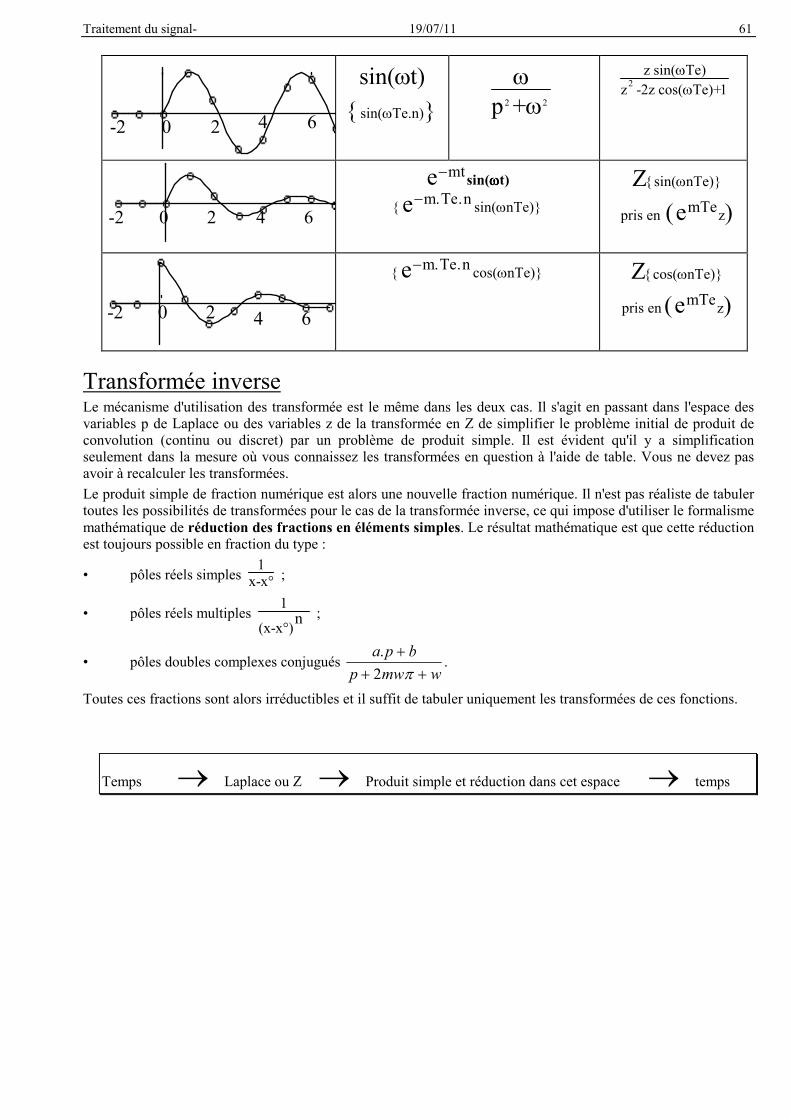
cos(ωx) {cos(ωTe.n) }
pp2+ω2
z(z-cos(ωTe))
z2 -2z cos(ωTe)+1
Traitement du signal- 19/07/11 61
-2 0 2 4 6
sin(ωt) {sin(ωTe.n)}
ωp2+ω2
z sin(ωTe)
z2 -2z cos(ωTe)+1
-2 0 2 4 6
e−mtsin(ωωωωt)
{e−m.Te.n sin(ωnTe)} Z{sin(ωnTe)}
pris en (emTez)
-2 0 2 4 6
{e−m.Te.n cos(ωnTe)} Z{cos(ωnTe)}
pris en (emTez)
Transformée inverse Le mécanisme d'utilisation des transformée est le même dans les deux cas. Il s'agit en passant dans l'espace des variables p de Laplace ou des variables z de la transformée en Z de simplifier le problème initial de produit de convolution (continu ou discret) par un problème de produit simple. Il est évident qu'il y a simplification seulement dans la mesure où vous connaissez les transformées en question à l'aide de table. Vous ne devez pas avoir à recalculer les transformées.
Le produit simple de fraction numérique est alors une nouvelle fraction numérique. Il n'est pas réaliste de tabuler toutes les possibilités de transformées pour le cas de la transformée inverse, ce qui impose d'utiliser le formalisme mathématique de réduction des fractions en éléments simples. Le résultat mathématique est que cette réduction est toujours possible en fraction du type :
• pôles réels simples 1x-x° ;
• pôles réels multiples 1
(x-x°)n ;
• pôles doubles complexes conjugués wmwp
bpa
+++π2
..
Toutes ces fractions sont alors irréductibles et il suffit de tabuler uniquement les transformées de ces fonctions.
Temps → Laplace ou Z → Produit simple et réduction dans cet espace → temps
62 Département Mesures Physiques - IUT Orsay
Transformée de Fourier Discrète
Définition comme transformée en Z de la transformée de Fourier continue
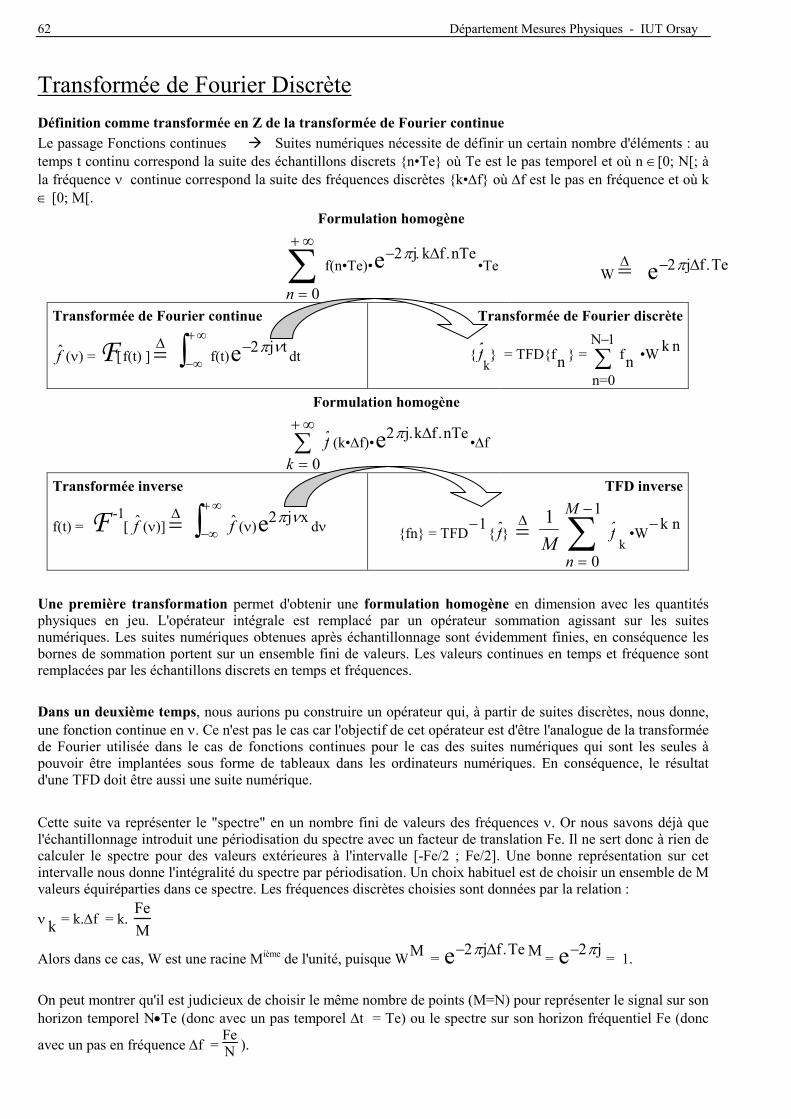
Le passage Fonctions continues � Suites numériques nécessite de définir un certain nombre d'éléments : au temps t continu correspond la suite des échantillons discrets {n•Te} où Te est le pas temporel et où n ∈[0; N[; à la fréquence ν continue correspond la suite des fréquences discrètes {k•∆f} où ∆f est le pas en fréquence et où k ∈ [0; M[.
Formulation homogène
∑∞+
= 0n
f(n•Te)•e−2πj. k∆f.nTe•Te
W =∆ e−2πj∆f.Te
Transformée de Fourier continue
ˆ f (ν) = F[f(t) ] =∆ −∞
+ ∞
∫ f(t)e−2πjνtdt
Transformée de Fourier discrète
{ ˆ f k} = TFD{fn } = ∑
n=0
Ν−1 fn •W
k n
Formulation homogène
∑∞+
= 0k
ˆ f (k•∆f)•e2πj.k∆f.nTe•∆f
Transformée inverse
f(t) = F -1
[ ˆ f (ν)] =∆ −∞
+ ∞
∫ ˆ f (ν)e2πjνxdν
TFD inverse
{fn} = TFD−1{ ˆ f } =∆
M
1 ∑−
=
1
0
M
n
ˆ f k •W
−k n
Une première transformation permet d'obtenir une formulation homogène en dimension avec les quantités physiques en jeu. L'opérateur intégrale est remplacé par un opérateur sommation agissant sur les suites numériques. Les suites numériques obtenues après échantillonnage sont évidemment finies, en conséquence les bornes de sommation portent sur un ensemble fini de valeurs. Les valeurs continues en temps et fréquence sont remplacées par les échantillons discrets en temps et fréquences.
Dans un deuxième temps, nous aurions pu construire un opérateur qui, à partir de suites discrètes, nous donne, une fonction continue en ν. Ce n'est pas le cas car l'objectif de cet opérateur est d'être l'analogue de la transformée de Fourier utilisée dans le cas de fonctions continues pour le cas des suites numériques qui sont les seules à pouvoir être implantées sous forme de tableaux dans les ordinateurs numériques. En conséquence, le résultat d'une TFD doit être aussi une suite numérique.
Cette suite va représenter le "spectre" en un nombre fini de valeurs des fréquences ν. Or nous savons déjà que l'échantillonnage introduit une périodisation du spectre avec un facteur de translation Fe. Il ne sert donc à rien de calculer le spectre pour des valeurs extérieures à l'intervalle [-Fe/2 ; Fe/2]. Une bonne représentation sur cet intervalle nous donne l'intégralité du spectre par périodisation. Un choix habituel est de choisir un ensemble de M valeurs équiréparties dans ce spectre. Les fréquences discrètes choisies sont données par la relation :
ν k = k.∆f = k. Fe
M
Alors dans ce cas, W est une racine Mième de l'unité, puisque WM = e−2πj∆f.TeM = e−2πj = 1.
On peut montrer qu'il est judicieux de choisir le même nombre de points (M=N) pour représenter le signal sur son horizon temporel N•Te (donc avec un pas temporel ∆t = Te) ou le spectre sur son horizon fréquentiel Fe (donc
avec un pas en fréquence ∆f = FeN ).
Traitement du signal- 19/07/11 63
Dans la dernière étape, il ne doit plus y avoir de référence aux grandeurs physiques Te et ∆f dans la définition de l'opérateur discret. On fait Te=1 et Fe =1.
Cas M = N TFD inverse
TFD−1{ ˆ f }n =
∆ N
1 ∑−
0=
1N
k
ˆ f k•W−k n
Avec cette nouvelle définition, nous avons :
{1} suite constante →TFD N{δ k} →
−1TFD {1}
Transformée de Fourier Rapide. Il est possible de trouver des algorithmes de calcul rapides. Les plus rapides
sont obtenus pour N= 2 P . C'est pourquoi il est vivement conseillé d'utiliser des séquences de longueur N qui soit une puissance de 2 dans la résolution numérique de vos problèmes utilisant des transformées de Fourier discrètes.
Lorsque ce n'est pas le cas, le logiciel s'autorise quelquefois à remplir l'horizon par des zéros pour atteindre une longueur N qui soit une puissance de 2.
Propriétés identiques au cas continu
� Linéarité
� Translation
� Symétries et parités
� Convolution
� Égalité de Parseval : la Puissance du signal est identique dans les deux représentations
Temporel
∑−
0=
1N
n
xn2
Fréquentiel
N
1 ∑−
0=
1N
n
x̂ n2
Soit un Signal périodique de période T . Il admet une décomposition en série de Fourier dont le Fondamental de
fréquence vaut 1T et l'Harmonique m est à la fréquence ν = m
1T . Le Coefficients de la série de Fourier est
Cm =∆ 1T ⌡⌠0
T
f(t)e−2πjν. tdt =
1pT ⌡⌠
0
pT
f(t)e−2πjν. tdt si p est entier
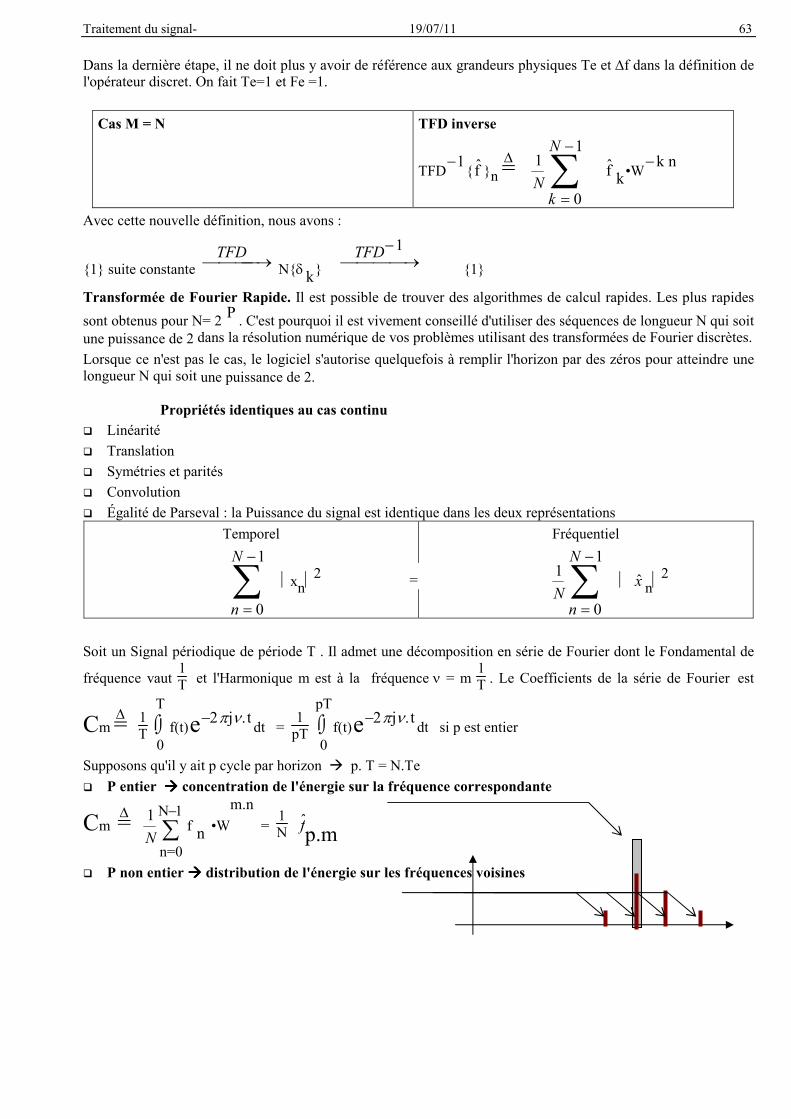
Supposons qu'il y ait p cycle par horizon � p. T = N.Te
� P entier ���� concentration de l'énergie sur la fréquence correspondante
Cm =∆ N
1∑n=0
Ν−1 f n •W
m.n
= 1N
ˆ f p.m
� P non entier ���� distribution de l'énergie sur les fréquences voisines
=
64 Département Mesures Physiques - IUT Orsay
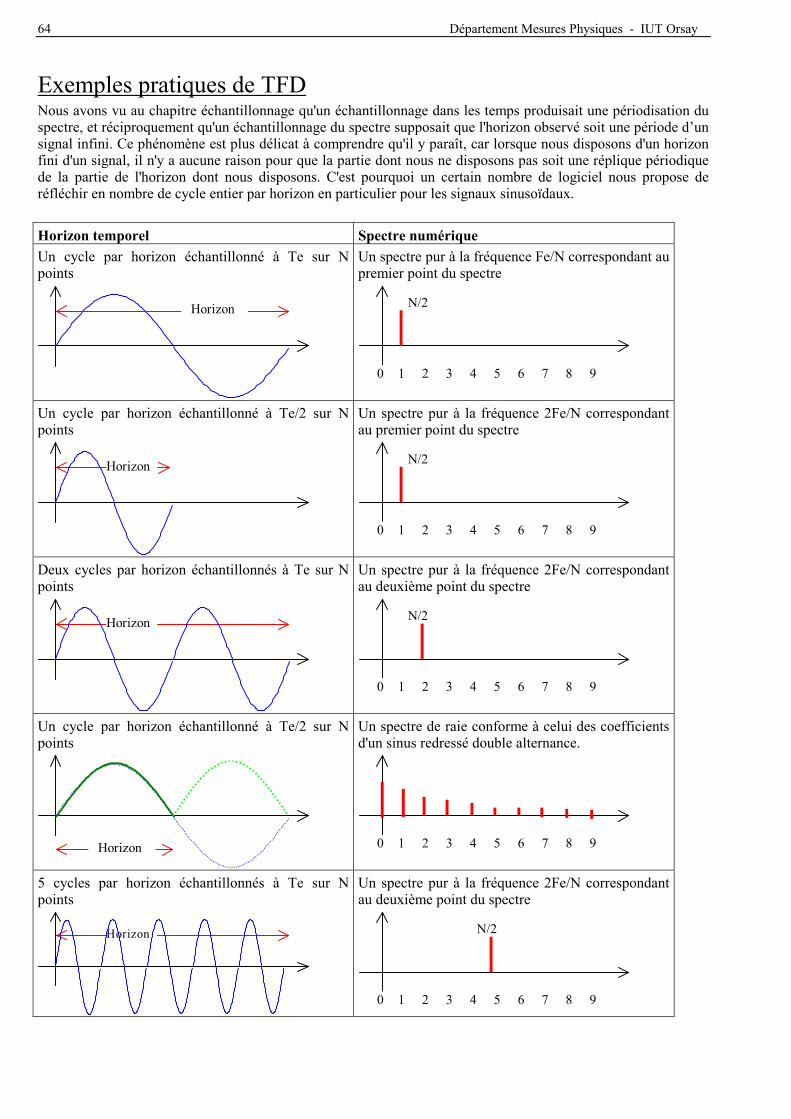
Exemples pratiques de TFD Nous avons vu au chapitre échantillonnage qu'un échantillonnage dans les temps produisait une périodisation du spectre, et réciproquement qu'un échantillonnage du spectre supposait que l'horizon observé soit une période d’un signal infini. Ce phénomène est plus délicat à comprendre qu'il y paraît, car lorsque nous disposons d'un horizon fini d'un signal, il n'y a aucune raison pour que la partie dont nous ne disposons pas soit une réplique périodique de la partie de l'horizon dont nous disposons. C'est pourquoi un certain nombre de logiciel nous propose de réfléchir en nombre de cycle entier par horizon en particulier pour les signaux sinusoïdaux.
Horizon temporel Spectre numérique
Un cycle par horizon échantillonné à Te sur N points
Horizon
Un spectre pur à la fréquence Fe/N correspondant au premier point du spectre
0 1 2 3 4 5 6 7 8 9
N/2
Un cycle par horizon échantillonné à Te/2 sur N points
Horizon
Un spectre pur à la fréquence 2Fe/N correspondant au premier point du spectre
0 1 2 3 4 5 6 7 8 9
N/2
Deux cycles par horizon échantillonnés à Te sur N points
Horizon
Un spectre pur à la fréquence 2Fe/N correspondant au deuxième point du spectre
0 1 2 3 4 5 6 7 8 9
N/2
Un cycle par horizon échantillonné à Te/2 sur N points
Horizon
Un spectre de raie conforme à celui des coefficients d'un sinus redressé double alternance.
0 1 2 3 4 5 6 7 8 9
5 cycles par horizon échantillonnés à Te sur N points
Horizon
Un spectre pur à la fréquence 2Fe/N correspondant au deuxième point du spectre
0 1 2 3 4 5 6 7 8 9
N/2