ANτiSE/SMIC PROTECτiON OF BUILDINGS /Ν HOR/ZONTAL AND...
9
OF BUILDINGS HOR/ZONTAL AND ROTA T.E.I. ABSTRACT: ln work we on the of bui ldings using automatic control systems in conjunction with the technology of "seismic base isolation·. The study aims at restricting the motion of a building within limits from its initial position and ideally the structure stand still during an earthquake. The required control forces are hydraulically generated and are applied at the base floor of the building. We are assuming that the earthquake is composed of two perpendicular produce motion of the building on the horizontal plane and about the 1. 617
Transcript of ANτiSE/SMIC PROTECτiON OF BUILDINGS /Ν HOR/ZONTAL AND...

ΑΝ1ΙΣΕΙΣΜΙΚΗ ΠΡΟΣΤΑΣΙΑ Κ1ΙΡΙΩΝ ΣΕ ΟΡΙΖΟΝ1ΙΑ ΚΑΙ ΣΤΡΟΦΙΚΗ
ΚΙΝΗΣΗ
ANτiSE/SMIC PROTECτiON OF BUILDINGS /Ν HOR/ZONTAL AND ROTA τιΟΝΑL ΜΟτΙΟΝ
ΣΟΛΔΑΤΟΣ, Α. Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών, Ε.Μ.Π. ΠΑΠΑΔΟΠΟΥ ΛΟΣ, Ε. Μηχανολόγος Μηχανικός, Επικ . Καθηγητής, Ε. Μ .Π. ΠΑΥΡΟΥΜΚΗΣ, Γ. Πολιτικός Μηχανικός, Αναπλ. Καθηγητής, Πανεπιστήμιο Ιωαννίνων. ΑΡΒΑΝΠΗΣ, Κ. Γ. Ηλεκτρολόγος Μηχανικός, Λέκτορας, Γ. Π.Α. ΖΑΧΑΡΕΝΑΚΗΣ, Ε . Πολιτικός Μηχανικός, Αναπλ. Καθηγητής, T.E.I. Ηρακλείου.
ΠΕΡΙΛΗΨΗ: Η παρούσα εργασία επικεντρώνεται στην αντισεισμική προστασία κτιρίων με σύστημα αυτομότου ελέγχου σε συνδυασμό με την τεχνολογία της "σεισμικό μονωμένης βόσης". Στόχος της μελέτης είναι ο περιορισμός των μετατοπίσεων ενός κτιρίου από την αρχική του θέση μέσα σε πολύ μικρό όρια και οριακό, η επlτευξη πλήρους ακινησίας του κατό τη διόρκεια ενός σεισμού. Οι ζητούμενες δυνόμεις ελέγχου είναι υδραυλικό παραγόμενες και εφαρμόζονται στη βόση του κτιρίου . Υποθέτουμε ότι ο σεισμός αποτελεlται από δύο κόθετες μεταξύ τους συνιστώσες οι οποίες προκαλούν κlνηση του κτιρίου στο οριζόντιο επlπεδο και περιστροφή του γύρω από τον κατακόρυφο όξονα.
ABSTRACT: ln thίs work we focυs on the antίseίsmίc ρrotectίon of buildings using automatic control systems in conjunction with the technology of "seismic base isolation·. The study aims at restricting the motion of a building within acceρtable limits from its initial position and ideally haνe the structure stand still during an earthquake. The required control forces are hydraulically generated and are applied at the base floor of the building. We are assuming that the earthquake is composed of two perpendicular comρonents, whίch produce motion of the building on the horizontal plane and ίts rotatίon about the νertical axίs .
1. ΕΙΣΑΓΩΓΗ
Σκοπός της παρούσας ερευνητικής εργασlας εlνα ι η προστασlα των κτιρίων από σεισμούς με χρήση της τεχνολογίας της σεισμικής μόνωσης (ελαστικό εφέδρανα) σε συνδυασμό με την τεχνολογlα του αυτομότου ελέγχου. Ειδικότερα, ο συνδυασμός αυτών των τεχνολογιών έχει ως στόχο τον περιορισμό των μετατοπίσεων ενός κτιρίου από την αρχική του θέση ισορροπlας μέσα σε πολύ μικρό επιθυμητό όρια. Ο έλεγχος της συμπεριφοράς των κατασκευών μπορεl να εlναι ενεργητικός (actiνe), ή παθητικός (ρassίνe) . Ο ενεργητικός έλεγχος προϋποθέτει μΙα εξωτερική πηγή ενέργειας για τη λειτουργία του συστήματος προστασίας, ενώ ο παθητικός δεν απαιτεl τέτοια πηγή. Εν τούτοις, με τα συστήματα ενεργητικού ελέγχου επιτυγχόνεται ένα ευρύ
φόσμα ειδικών χαρακτηριστικών, κότι που είναι αδύνατο με παθητικό μόνο συστήματα.
Σε μία πρόσφατη μέθοδο παθητικού ελέγχου κτιρlων, την ονομαζόμενη "σεισμική μόνωση βόσης", το δόμημα εδράζεται σε ένα σύστημα από aπομονωτές, έργο των οποlων εlναι η αποσύζευξή του από την οριζόντια κίνηση του εδόφους. Με τον τρόπο αυτό, όχι μόνον ελαπώνεται η σεισμική επlδραση στον σκελετό του δομήματος, αλλό προφυλόσσονται οι όνθρωποι και το περιεχόμενο από επιβλαβεlς ταλαντώσεις . Η παθητική αυτή προστασlα βελτιώνει τη συμπεριφορά του δομήματος στις σεισμικές δονήσεις αλλό δεν εξουδετερώνει τη μετατόπισή του. Ο περιορισμός της μετατόπισης σε μία αυθαίρετα μικρή περιοχή μπορεί να επιτευχθεl με συνδυασμό σεισμικής μόνωσης και ενεργητικού ελέγχου. Ένα επιπρόσθετο πλεονέκτημα του συνδυασμού
617

αυτού εlναι ότι το δόμημα παραμένει ευσταθές ακόμη και αν το σύστημα ενεργητικού ελέγχου δεν λειτουργήσει για οποιονδήποτε λόγο. Στην περlπτωση αυτή βέβαια, η κίνηση του δομήματος θα είναι αυξημένη.
Εξετόζουμε τον έλεγχο των κτιρίων με κlνηση σε τρεις βαθμούς ελευθερlας, δηλ. κατό μήκος δυο οριζοντίων διευθύνσεων και με στροφή γύρω από τον κατακόρυφο όξονα.
2. ΜΟΝΤΕΛΟΠΟΙΗΣΗ
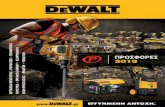
Στο Σχήμα 1 φαίνεται το μοντέλο ενός σεισμικό μονωμένου κτιρίου Ν ορόφων. Υποθέτουμε ότι υπάρχει γραμμική κlνηση στις δύο οριζόντιες διευθύνσεις, Ι, J και στροφική περί τον κατακόρυφο άξονα, Κ.
~--::;-------_-_-_ = ::: .~---/?1::;;Ν:-------~ ~==========~=·~
w υ :z: w r, α w ι...... w α
__J <ι:
1--α w :z:
618
---
---
~
----
Σχήμα 1. Μοντέλο κτιρίου Ν ορόφων
Fίgυre 1. Model of N-story building

θεωρούμε ότι οι σταθερές ελατηρlων και aποσβεστήρων μεταξύ των ορόφων εlναι συγκεντρωμένες στις 4 γωνlες και δεν εlναι Ισες μεταξύ τους. Η θεώρηση αυτή γίνεται για να συμπεριλάβουμε τις aνομοιομορφίες των μεσοτοιχιών και των παραθύρων, οι οποlες μπορεl να διαφέρουν σε κάθε όροφο. Αυτός εlναι και ο λόγος δημιουργίας της στροφής, αφού στο κτlριο υπάρχει πλήρης ασυμμετρία ελαστικών σταθερών μεταξύ των ορόφων. Υποθέτουμε ότι τα ελατήρια και οι aποσβεστήρες εlναι γραμμικά στοιχεία. Ο κάθε όροφος, i, παριστάνεται με μΙα
συγκεντρωμένη άκαμmη μάζα mι. Στη γωνlα 1 (όπως τυπικά φαίνεται στον πρώτο όροφο) ο i όροφος συνδέεται μέσω ελατηρίου και αποσβεστήρα με τον υποκείμενο (i-1) όροφο (η έδαφος) με τις σταθερές Κ~ι. ι d~ι.ι για τη μΙα οριζόντια διεύθυνση, /, και kl~ι. ι. d~ι. ι για τη διεύθυνση J. Για τις υπόλοιπες τρεις γωνlες ~13,4 οι σταθερές εlναι αντlστοιχα /(~ 1•2, d~ι.2, κ~'· '' d~'· '' ι<~ι. 4. d~ι.4 για τη διεύθυνση I και αντlστοιχα ΚΗ2, dι.ι.2. Κι.ι,,, d~'·'' Κι.ι,4, d~ι.4 για τη διεύθυνση J. Το μοντέλο αυτό στηρlζεται στην παραδοχή άκαμmων και aτενών πλακών και στην aπouola κατακόρυφων στοιχεlων με στρεmική δυσκαμψfα. Η θεωρlα που μελετάται εδώ μπορεl να χρησιμοποιηθεί και σε συνδυασμό με ακριβέστερα μοντέλα πολυόροφων κατασκευών (Αναστασιάδης, 1989). Το μοντέλο αυτό εlναι το σύστημα υπό
εξέταση. Η περιγραφή του συστήματος γίνεται με απόλυτες συντεταγμένες (Kelly et al, 1987a).
Για την παράσταση των δυναμικών εξισώσεων στο χώρα κατάστασης επιλέγουμε το διάνυσμα κατάστασης
Χ= μ., .. XN,XN+I " XJN• •• .. ;tJN+I '' X6N r = [Υ, .. ->{,,1, ... ~.Υι ... ~ιι,Υι ... ~,θ,..iJN,θi .. ON r Οι εξισώσεις στο χώρα κατάστασης εlναι (Soldatos, 2002):
x=Ax+Cv (1a)
x(to) = Χ4 (1β)
όπου η διαταραχή
δεν υπερβαίνει κάποια λογικά όρια που προκύπτουν από γνωστές καταγραφές σεισμών, όπως προβλέπεται από τη θεωρlα (Kelly et al, 1987a,b), και
ι ι ι
ι ι ι ι ι ι ι ι
J!, : J\, : Gω.: Gω.: J\J : -1. ι ι ι ι ι ι ι ι ι ι
······f······t······t······t······t······ ι • ι ι ι ι ι ι ι ι
ι_, : Gω. : Gω. : Gω. : Gω. : Gω. I Ι I I Ι ι ι ι ι ι
______ ι __ ---- ι .. _ .. _ .... ι ...... .1 •••••• l • ••••. ι ι ι ι ι ι ι ι ι ι Ι Ι Ι I I
Gω.: Gω.: --iJ: -1. : 4. : -1. ι ι ι ι ι
Λ = (2) ι ι ι ι ι
... ....... ι ... .. ...... ι .......... ι ............ ί ........... .ι .......... . ι ι ι ι ι ι ι ι ι ι
Ι Ι Ι Ι I
Gω.: Gω. : ι_: Gω.: Gω. : q,. Ι I Ι I Ι ι ι ι ι ι
- -----~-- ----···-- --· ----·-·------ ··-----1 ι ι ι ι ι ι ι ι ι
J!, : J\, : 1J : -1. : J\J : -1. ι ι ι ι ι ι ι ι ι ι Ι Ι Ι Ι I ............................................................................. ι ι ι ι ι ι ι ι ι ι
q,. : q,. : q,. : Gω. : ι_ : Gω. ι ι ι ι ι
ι ι ι ι ι ι
Το ακόλουθο παράδειγμα δεlχνει τυπικές αποκρlσεις ενός σεισμικά μονωμένου κτιρίου χωρlς σύστημα αυτομάτου ελέγχου.
2.1 Παράδειγμα 1
θεωρούμε ένα κτlριο τριών (8*13 m2) ορόφων,
δηλ. Ν=3. Οι μάζες και οι ροπές αδρανεlας εlναι
mι = 180000 kg J1 = 3495000 Kg m2
m2 = 150000 kg J2 = 2912500 Kg m2
m3 = 150000 kg J3 = 2912500 Kg rrt
Οι σταθερές ελαστικότητας και απόσβεσης
δlνονται στον Πfνακα 1. Με αντικατάσταση των τιμών αυτών, (Soldatos, 2002), προκύmουν και τα στοιχεία του Α στην Εξίσωση 2 που παρουσιάζονται στόν Πlνακα 2.
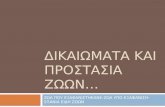
Τα σεισμικά δεδομένα που χρησιμοποιήθηκαν προέρχονται από τον σεισμό του ΕΙ Centro, 1940 και δlνονται στα Σχήματα 2 και 3. Οι διευθύνσεις /, J ορίζονται στο Σχήμα 1.
619

Πlνακας 1 Σταθερές κτιρlου Table 1 Building constants
Διεύθυνση Ι Διεύθυνση J
k:, = 1500 kN/m k:,, = 1500 kN/m
k:, = 1500 kN/m
k:, = 1500 kN/m
k:., = 35556 kN/m
k :,, = 120000 kN/m
k:., = 142917 kN/m
k:., = 142917 kN/m
k:,, = 35556 kN/m
k;,, = 120000 kN/m
k:,, = 142917 kN/m
k' = 142917 kN/m
[
-6.57 4.91 ο ] Α11 = 5.89 - I /. 77 5.89
ο 5.89 -5.89
[
• 5.20 3.53 ο ] Λ,,= 4.24 -8.48 4.24
ο 4.24 -4.24
c;,, =75kN ·slm k:,, = 1500 kN/m c:, =75kN· slm
c;,, = 75 kN · slm k:,, = 1500 kN/m c:, =75kN·slm
c;,, =75kN·slm k;, = 1500 kN/m c;, = 75 kN ·slm
c;,, =75kN ·slm k;, = 1500 kN/m c;, =75kN·slm
c:. ι =71 kN·slm k{.1 = 80000 kN/m c1., = 160kN·slm
c:., = 240 kN · s/m kf, = 120000 kN/m c1., = 240 kN · slm
c;,, = 286 kN · slm kf, = 59063 kN/m c{., =118kN·slm
c:., = 286 kN · slm k:, =59063kN/m c:,, = 118 kN · s/m
c:. ι =7/kN·slm k;, = 80000 kN/m c~1 =160kN·slm
c:., = 240 kN · slm k~, = 120000 kN/m c;., = 240 kN · slm
c:., = 286 kN · slm k~, = 59063 kN/m c;., = 118kN·slm
c' = 286 kN ·slm k~, = 59063 kN/m c;, =118kN·slm
Πίνακας 2 Υποπlνακες του συστήματος Table 2 System submatήces
[
-2485.50 2452.17 ο
Α11 = 2942.60 -5885.20 2942.60
ο 2942.60 -2942.60
[
2895.07 -2895.07 ο ] Λ16 = -3474.08 6948.16 -3474.08
ο -3474.08 3474.08
5.80 -5.80 ο
Α"= -6.96 13.92 -6.96 ο -6.96 6.96
[
-16.73 11.73 ο ] Α,1 = 14.08 -28.15 14.08
ο 14.08 -14.08
[
-2.89 2.89 ο ] Α,,= 3.47 -6.93 3.47
ο 3.47 -3.47 [
-1800.70 1767. 37 ο ] Α,.= 2120.84 - 424/.68 2120.84
ο 2120.84 -2120.84 [
149.10 -149.10 ο ] Α, = -178.92 357.85 - 178.92
ο -178.92 178.92
[
0.30 -0.30 ο ] Α" = - 0.36 0.72 -0.36
ο -0.36 0.36
- 74.39 74.39 ο
Α,. = 89.27 -178.54 89.27
ο 89.27 -89.27
ο υ. ι I ιιltlιJ. !Μ }.:ι ψ~~ I IY'-1'
2
Α
.. 10 20 30
rime(ι)
[
• 1444.44 1444.44 ο ] Α,.= 1733.33 -3466.67 1733.33
ο 1733.33 -1733.33 [
-0.15 0.15 ο ] Α,,= 0.17 -0.36 0.17
ο 0.17 -0.17
[
• 5966.40 5866.40 ο ] Α,.= 7039.68 • 14079.36 7039.68
ο 7039.68 -7039.68
Λ Λ I ~ J Υ\ (\ Α -Λ
·ν
~vv l/ v rv ν Jv
40 50 2 30 .. rime(a)
Σχήμα 2. Σεισμός του ΕΙ Centro, διεύθυνση I Fίgure 2. ΕΙ Centro earthquake, direction I
620
6

-~ ~ ~ ~ φ -Σχήμα 3. Σεισμός του ΕΙ Centro, διεύθυνση J
Figure 3. ΕΙ Centro earthquake, direction J
Οι αποκρlσεις του πρώτου ορόφου μόνο, δlνονται στα Σχήματα 4 και 5. Οι άλλοι συμπεριφέρονται παρομοlως, (Kelly, 1987a).
f I
!Ω ...
--,-----'
' - J ____ _
Σχf'1μα 4. Απόκριση χωρlς έλεγχο, διεύθυνση I Figure 4. Resρonse without control, direction I
! ι ι
·~~~~~~~~~~~~=
~ ~ ~ ~ φ φ .... Σχήμα 5. Απόκριση χωρlς έλεγχο, διεύθυνση J Figure 5. Resρonse without control, direction J
,.,.
' ' ---~----
:ι:::::c_::_~::::: -L - -- - -~----J ____ _
--~ -- - _ _ ________ J ____ _
---- ι -- L -----~ ---- ~------------J- ___ ι ____ ~----J ____ _ --'-----J·----L-----L ____ J ____ _
:ιο !Ω .... Σχήμα 6. Γωνιακή απόκριση, χωρlς έλεγχο Figure 6. Angular resρonse, without control
Στό Σχήμα 6 παρουσιόζονται οι γωνιακές ταχύτητες και μετατοπlσεις των τριών ορόφων όταν uπόρχει σεισμική διέγερση.
3. ΕΛΕΓΧΟΣ
Εφαρμόζουμε τον έλεγχο u(t) στη βόση του κτιρlου (πρώτος όροφος), όπότε η Εξίσωση 1α του ελεγχόμενου πλέον συστήματος γίνεται :
x(l) = Α x(l) + Β ιι(t) + C v (t) (3)
Στην περfπτωση αυτή εφαρμόζουμε μΙα δύναμη κατό τη διεύθυνση /, μΙα κατό τη διεύθυνση J και μΙα ροπή περl τον κατακόρυφο άξονα . Οι δυνόμεις αυτές περιορlζουν τη μετατόπιση του κτιρlου στις δύο διευθύνσεις, ενώ η ροπή περιορlζει τη στροφή των ορόφων.
621

Το διάνυσμα u(t) εlναι επομένως διαστάσεων 3χ1 .
Για ένα κτlριο Ν ορόφων, ο πίνακας Β εlναι διαστάσεων 6Νχ3 και ισούται με
.!.. ο ο m,
8 • ο ο(}Ι ~ ιω ο,., .!.. m,
o"'_')fιl ο,., ο 0{111-ΙιιιJ ο,.,
ο ο I
J,
Οι μέγιστες τιμές της μετατόπισης και ταχύτητας του εδάφους στις δύο διευθύνσεις
εlναι γνωστές από ήδη υπάρχουσες καταγραφές σεισμών. Ο εύρωστος ελεγκτής, (Soldatos, 2002), που χρησιμοποιούμε περιγράφεται από την παρακάτω σχέση:
-Β' Ρ Χ I τ xJ Ιn' Ρ xJ ·ρ . εάν Β Ρ ~ ε
Β' Ρ χ ---- ·ρ . εάν IB'Pxl <ε
ε
(4)
για e >0. Η επιλογή του ε αποτελεl παράγοντα σχεδlασης του ελεγκτή. Ο πlνακας
Ρ αποτελεl τη λύση της εξlσωσης
ΡΑ+Λ'Ρ+Q = Ο
για δεδομένο Q > Ο, ενώ ο υπολογισμός του ρ δlνεται από, (Soldatos, 2002):
Ρ =ΓΣ
όπου,
Σ = {(c~. ι + c:, + c:, + c:, ) · jι:- +
(k:1 + k:, + k:, + k:,,) ·Υ:-11 +
rc:ι + c:, + c:, + c;,). jι:- +
(k:1 +k:, +k:, +k:,)· y;-1' +
rc:ι +c;,, -c:, -c:,)· jι~- +
(k:1 + k:,- k:,- k:,) · y:- +
(-c;1 +c;, +c:, -c:, )· y;- +
(-k:1 + k:, + k:, -k:,) · y;- 1'
622
Εφαρμογή του ελέγχου που δlνεται από την Εξlσωση 4 εγγυάται την πρακτική ευστάθεια, (Soldatos, 2002), του κτιρlου , δηλ. τον περιορισμό της κlνησης του κατά τη διάρκεια του σεισμού σε μια όσο μικρή περιοχή εττιθυμούμε .
3.1 Παράδειγμα 2
Επανεξετάζουμε τα δεδομένα του Παραδείγματος 1 με χρήση του ελέγχου που δίνεται από την Εξlσωση 4. Για τον υπολογισμό του πlνακα Ρ λαμβόνουμε τον Q = Ι 1ιιιι18• Χρησιμοποιώντας τα Ιδια εφέδρανα στις 4 γωνίες, και από π.χ. τα Σχήματα 2 και 3
)ι. 1- =0.35m/s y/-=0.1/m
jι/- = 0.37 mls y/- = 0.20 m
και επομένως,
= 1518 kN
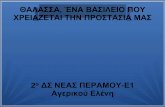
Τα Σχήματα 7, 8 και 9 παραυσιάζουν τις ταχύτητες και τις μετατοπίσεις παρουσία της σεισμικής διέγερσης και του ελέγχου για ε =0.000001 . Οι απαιτούμενες δυνάμεις και
ροπές δίνονται στα Σχήματα 1 Ο και 11.
ι ω - - - - -:- - - - ~- - - - - ~ -
' '
'r ~: "--+ -
' ' ' ι~e~--------~·----------~-------~J_- _-_-_-~ι_- _--_-_-~~--~
~ ~ ~ ~ ~
αι.-ιοωιιDΙι~---.ιιιcαι
Ι οι
I ι .οι ' ' '
--- - ι-- -- - , - - - -τ -- - -Γ -- - - ·ι-
1 -ο~ο----~~----~~----~=----~~---~=---~ .... 02
Σχήμα 7. Ταχύτητα και μετατόπιση πρώτου ορόφου με έλεγχο, διεύθυνση Ι
Figυre 7. Velocity and displacement offιrst floor with control, direction I

Σχήμα 8. Ταχύτητα και μετατόπιση πρώτου ορόφου με έλεγχο, διεύθυνση J
Figure 8. Velocίty and displacement of first floor wίth control, direction J
4 ΣΥΜΠΕΡΑΣΜΑΤΑ
Παρατηρούμε όη με την προσθήκη του ελέγχου υπάρχει αισθητή βελτίωση στη συμπεριφορά του κτιρίου τόσο απο πλευράς πλάτους ταλάντωσης όσο και συχνότητας. Ο ενεργητικός έλεγχος διασφαλίζει κάτω από ρεαλισηκές συνθήκες την ασφάλεια των δομημάτων. Οι ντετερμινιστικές περιγραφές
των αγνώστων ποσοτήτων αντιστοιχούν σε κάθε πιθανή υλοποίησή τους. Για παράδειγμα, η μόνη απαιτούμενη γνώση για την σεισμική δόνηση είναι το μέγιστο προσδοκόμενο εύρος της. Αυτό είναι γνωστό ή υπολογίσιμο από προηγούμενες περιπτώσεις σεισμικών διαταραχών. Ειδικότερα, δεν απαιτείται η παραμικρή σεισμική πρόβλεψη. Η απόδοση του προτεινόμενου ελεγκτή είναι
εγγυημένη κάτω από πολύ γενικές υποθέσεις. Η οριακή απόκριση της κατασκευής είναι γνωστή εκ των προτέρων. Αντίστροφα, δεδομένης μιάς μέγιστης ζητούμενης aπόκρισης, ο κατάλληλος ελεγκτής μπορεί να σχεδιαστεί. Είναι ευνόητο ότι όσο πιό ψηλές εlναι οι απαιτήσεις και όσο πιό γενικές οι υποθέσεις τόσο πιό απαιτητική είναι και η σχεδίαση του ελεγκτή.
Το μέγιστο μέγεθος της απαιτούμενης δύναμης του ελεγκτή δεν υπερβαίνει αυτό της διαταραχής που μεταδίδεται στην βάση των κατασκευών, (Kelly et al, 1987a). Επομένως, η σεισμική μόνωση της βόσης διαδραματίζει σπουδοίο ρόλο καθ'όσον επιτρέπει την ελάπωση αυτής της διαταραχής. Η σεισμική μόνωση συνεπάγεται επίσης ελάπωση στη
ο
• Ό ' .. , ' • r ο ο
----τ- --Γ-
ο 10 a1J•
-- .. -- , -.. .
' ·τ
II~L-....L..--· -......,~ ·_· -- -__,· ,':-. ·_·_· -....'::..~ ·_· _· · ......,-~,...-- ·_·--:! ι t ι ι ι
1 ---- Ι ----, ·τ ---Γ---
1:) ., :ι;> .cι SJ ι
h (4
---- I ____ .................... ......... ι.. ..
• . ΩΙ . ~ • : ' : :
ι rr . '
ο
ο ---- ----' ο
2) ---~ - ~--
' ' ο ο
ο '
ο ο
ο
ο ο ο
-- -- - !-----~----~-----' ο ' ο ο
2) - 4)
~ -- --- ~ ----~----~-----
,ι~~~~· ~--~--~ ~--ιif • • • • -... - - ι . - - . '·---. ·' - .. --
' ο ο ο ο ο
ο 1J ., ., .cι SJ ι -Σχήμα 9. Γωνιακή ταχύτητα και μετατόπιση με έλεγχο
Figure 9. Angular νelocity and displacement with control
συχνότητα κίνησης της κατασκευής και ακολούθως, στη συχνότητα των δυνάμεων του ελεγκτή. Αυτό είναι ευττρόσδεκτο εν όψει των χρονικών καθυστερήσεων που προκύπτουν απο π.χ. σταθερές χρόνου των αισθητηρίων οργάνων και των ενεργοποιητών οι οποίες συνήθως παραλεiπονται στα μαθηματικά μοντέλα. Το αυτόματο σύστημα είναι σχετικά απλό
και ο προσδιορισμός του στηρίζεται σε
623

ι -_, ' ι ι
ι
ι
-ι
ι
' .J-- -.ι.
' ' L---- ... ι. ----
ι
ι
' ι. - - - - ·- - - - -ι ι
I ι ι
' -~- ----·--- - ~
' Μ a • • • -·· ,• to' c...ιroιιιc::ecι•t.-ti·~Ιf800Rl
. ' ' ' ι τ----·Γ·---~-----
ι ' ι ι ι ι ι
,-----,-- ·-- τ -- ---Γ -- -- -,·-- --I I I I Ι
ι ι • ι ' '
•,L----.~--~.~--~.~--~--~.--~. -·· Σχήμα 10. Δυνάμεις ελtγχοο Figure 1 Ο. Control forces
' - - -ι- - - - - "1 - -ι ' '
' ' ι τ- - ---r - - - - ~-----
' ι ' ·• - - - -ι- - • - - ., - - • • - r - - - • - ,- - - - - ... , ... - - - -
ι ι ι ι ι - ' ι --- ---------' ι ' ι
-·.~-----~--~-~--~.~--~-~--~-~~ -·· Σχήμα 11. Ροπή ελtγχου Figure 11. Control torque
624
πληροφορίες γνωστές πρΙν από την έναρξη της δόνησης. Μόνο οι μεταβλητές κατάστασης του συστήματος (απόλυτη ταχύτητα και μετατόmση) χρειόζονται κατά την διάρκεια της λειτουργlας του. Η αναγνώριση των μεταβλητών αυτών είναι σχετικό δύσκολη όταν υπάρχει ανάμιξη θορύβων ή διαταραχών και αβεβαιότητες. Η απόλυτη επιτάχυνση μπορεί να μετρηθεί με χρήση επιταχυνσιομέτρων. Η ζητούμενη ταχύτητα και μετατόπιση προκύπτουν τότε με ολοκλήρωση, δεδομένου ότι οι αρχικές συνθήκες είναι γνωστές και η επίδραση των θορύβων (από τα όργανα μέτρησης, λανθασμένες εκτιμήσεις, εξωγενεlς παρόγοντες κ.τ .λ . ) φιλτρόρεται κατόλληλα . Η εκτίμηση τέτοιων μεταβλητών αποτελεί πεδίο έρευνας, δεδομένου ότι οι ζητούμενες ποσότητες απαιτούνται σε πραγματικό χρόνο. Προς αυτή την κατεύθυνση μελετούνται για σύγκριση διόφορες τεχνικές ολοκλήρωσης, παρατηρητές κατάστασης, φlλτρα Kafman, και αριθμητικές μέθοδοι (VIachos, 2000).
Οι ζητούμενες δυνάμεις από τον ελεγκτή εφαρμόζονται μόνον στην βάση της κατασκευής. Τα υδραυλικό έμβολα προσαρμόζονται στο έδαφος και με την βοήθεια βαλβίδων εξασκούν τις απαιτούμενες δυνάμεις στους κατόλληλους χρόνοος. Η υλοπο/ηση είναι απλή συγκρινόμενη με όλλα συστήματα που έχοον προταθεί τα οποlα απαιτούν σημαντικές εξωτερικές δυνάμεις σε όλους τους ορόφους. Ένα πρόβλημα ποο προιcύπτει κατά την παραγωγή της δύναμης τοο ελεγκτή στη βάση του κτιρlοu είVΟJ το εξής. Οι υδραυλικοί ενεργοποιητές ε/ναι τοποθετημένοι στο έδαφος το οποlο κατά τη διάριwα τοο σεισμού δεν αποτελε/ σταθερό σημε/ο στήριξης. Πρέπει λοmόν η απαιτούμενη ενέργεια τοο ρυθμιστή να εξασφαλlζεται σύμφωνα με τις προδιαγραφές ανεξάρτητα από την κlνηση του εδάφους. Αυτό αποτελεί ένα πρόβλημα ελtγχου.
Ενδεχόμενες δυσκολίες από τη διακοπή τοο ηλεκτρικού ρεύματος κατά τη διάρκεια του σεισμού μπορούν να αποφευχθούν εύκολα. Λόγω των χαμηλών απαιτι'ισεων τοο προτεινόμενου σχήματος, η δύναμη του ελεγκτή μπορεί να παραχθεί τοπικό από μικρι'ις κλίμακας ηλεκτρική παραγωγή. Ούτως ή όλλως και παντελής έλλειψη τοο ενεργητικού ελtγχοο μπορεί να αντιμετωπιστεί, ως ένα βαθμό, από τη σεισμικό μονωμένη βάση (fail -safe system).
Το κόστος της τοποθέτησης αλλά και της λειτουργlας του αυτομάτου συστήματος εlναι σχετικό χαμηλό. Δεδομένης και της

συντρέχουσας οικονομiας στην όχι τόσο απαιτητική σε δομικό υλικό κατασκευής το όφελος εiναι τεράστιο.
5. ΕΥΧΑΡΙΗΙΕΣ
Ο πρώτος συγγραφέας επιθυμεί, από τη θέση αυτή, να εκφράσει τις ευχαριστfες του στο Μηχ. Μηχανικό Κ. Ι. Κοντοπόδη για τη βοήθεια του. Η έρευνα χρηματοδοτήθηκε από το ΕΠΙΣΕΥ
του Τμήματος Ηλεκ. Μηχ. και Μηχ. Υπολ. του Ε.Μ.Π. με το πρόγραμμα Αρχιμήδης 65/1017.
6.ΑΝΑΦΟΡΕΣ
Αναστασιόδης, Κ. (1989), "Αντισεισμικές Κατασκευές ι•, Εκδόσεις CT Compυter Technics, Θεσσαλονίκη.
Arνanitis , K.G., Zacharenakis, Ε . and Soldatos, A.G. (2000), 'Όptima\ Noise Rejection in Structural Analysis by Means of Generalized Sampled-Data Hold Functions", Joumal of G\obal Oρtimization, νο\. 17, pp. 19-42.
Arνanitis, K.G., Zacharenakis, Ε. , Soldatos, A.G. and Staνroulakis, G.E. (2001), "New Trends in Optimal Structural Control", lnνited Chapter in the Special Volume on Stability, Vιbration and Control of Systems, A.Belyaeν and A.Guran (Eds.), World Scientifιc Publishers.
Kelly, J.M., Leitmann, G. and Soldatos, A.G. (1987a), "Robust Control of Base -lsolated Structures under Earthquake Excitation•, Joumal of Optimization Theory and Aρρlications, Vo\.53, Νο.2, pp. 159-180.
Kelly, J.M., Leitmann, G. and Soldatos, A.G. (1987b), "Seismic Protection of Structures Using Base lsolation and Actiνe Control". Proceedings of the Ameήcan Control Conference, Minneapolis, Minnesota, pp. 1885-1889.
Soldatos, A.G. (1992), Άπ lnνestigation on Antiseismic Base lsolation and Control", Proceedings of the Fourth Workshop οπ Control Mechanics, Lecture Notes in Control and lnformation Sciences, Springer Verlag, pp. 232-247.
Soidatos, A.G. (2002), "Three degree of freedom modeling of structures and control". ίπ preparation.
Soldatos, A.G., Arνanitis, K.G. and Zacharenakίs, Ε. (2001), "Actiνe Control Schemes for Aseismic Base \solated Structures", Archiνes of Applied Mechanics. Εγινε δεκτή για δημοσίευση με μικρές αλλαγές.
Soldatos, A.G. and Paraskeνopou\os, Ρ .Ν. (1995), "Modem Techniques of Automatic Control for Antiseismic Protection of Buildings•. Proceedings of Second ΤΕΕ Workshop on Automatic Control, Athens, Greece.
Vlachos, Κ. (2000), "Protection of Base lsolated Buildings Using Robust and Adaptiνe Control", M.Sc. in Automatic Control, N.T.U.A.,Greece.
625