ANALISI DINAMICA CON IL MEF Principali tipi di analisi ... · La riduzione delle matrici di massa e...
108
ANALISI DINAMICA CON IL MEF Principali tipi di analisi • analisi modale • analisi della risposta armonica • analisi di transitorio dinamico
Transcript of ANALISI DINAMICA CON IL MEF Principali tipi di analisi ... · La riduzione delle matrici di massa e...
ANALISI DINAMICA CON IL MEF
Principali tipi di analisi
• analisi modale
• analisi della risposta armonica
• analisi di transitorio dinamico
i
j
k
xy
{ }v&&ρ
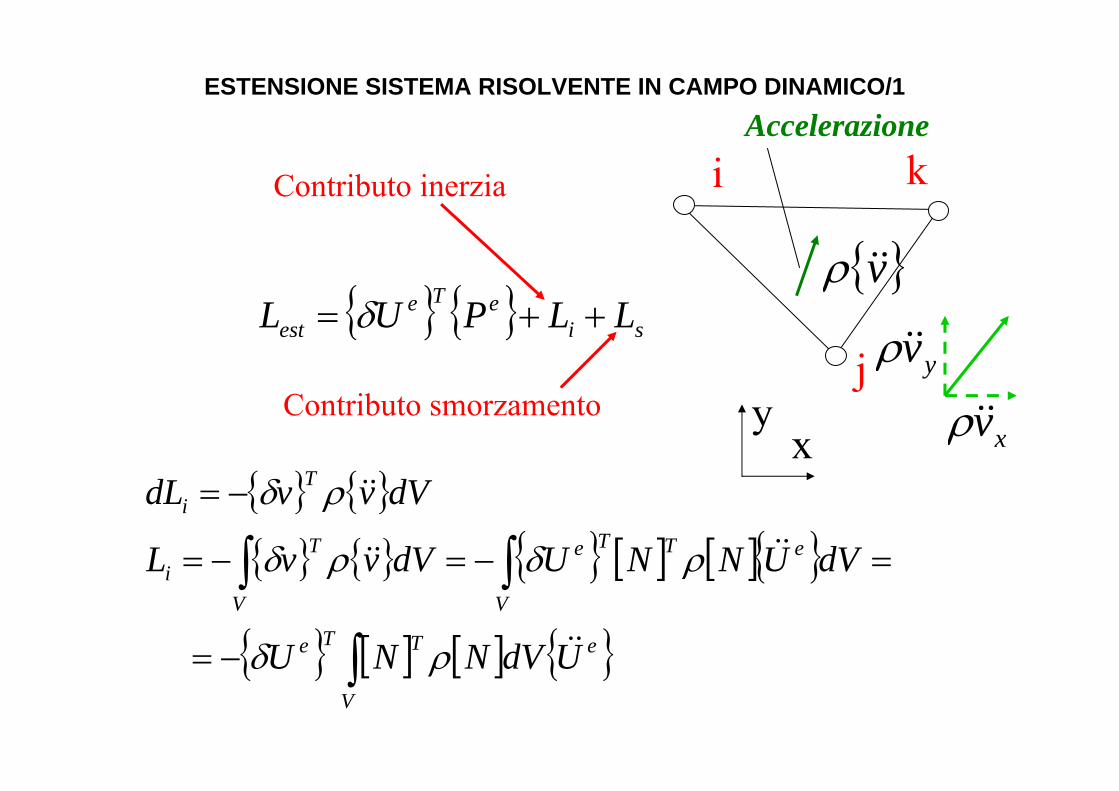
Accelerazione
{ } { } sieTe
est LLPUL ++= δ
{ } { }{ } { } { } [ ] [ ]{ }
{ } [ ] [ ] { }∫
∫∫
−=
=−=−=
−=
V
eTTe
V
eTTe
V
Ti
Ti
UdVNNU
dVUNNUdVvvL
dVvvdL
&&
&&&&
&&
ρδ
ρδρδ
ρδ
Contributo inerzia
Contributo smorzamentoyv&&ρ
xv&&ρ
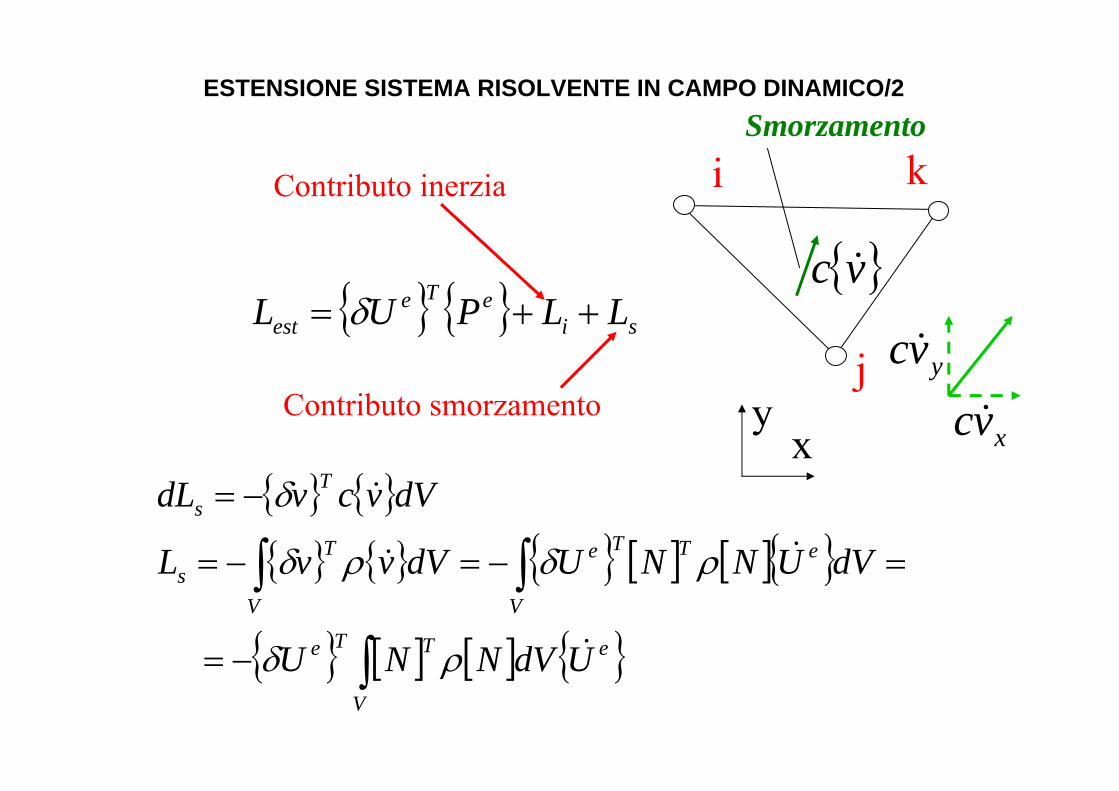
ESTENSIONE SISTEMA RISOLVENTE IN CAMPO DINAMICO/1
i
j
k
xy
{ }vc &
Smorzamento
{ } { } sieTe
est LLPUL ++= δ
{ } { }{ } { } { } [ ] [ ]{ }
{ } [ ] [ ] { }∫
∫∫
−=
=−=−=
−=
V
eTTe
V
eTTe
V
Ts
Ts
UdVNNU
dVUNNUdVvvL
dVvcvdL
&
&&
&
ρδ
ρδρδ
δ
Contributo inerzia
Contributo smorzamentoyvc &
xvc &
ESTENSIONE SISTEMA RISOLVENTE IN CAMPO DINAMICO/2
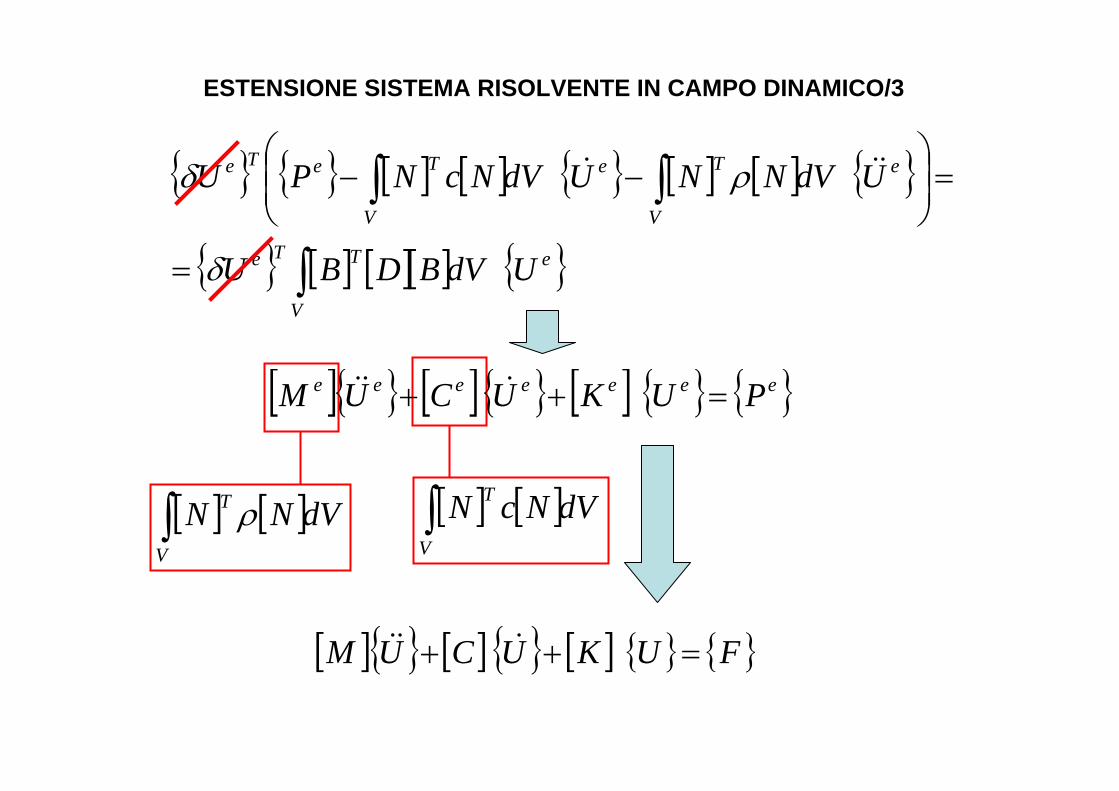
ESTENSIONE SISTEMA RISOLVENTE IN CAMPO DINAMICO/3
{ } { } [ ] [ ] { } [ ] [ ] { }
{ } [ ] [ ][ ] { }e
V
TTe
e
V
Te
V
TeTe
UdVBDBU
UdVNNUdVNcNPU
∫
∫∫
=
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
δ
ρδ &&&
[ ] [ ]dVNcNV
T∫[ ] [ ]dVNNV
T∫ ρ
[ ]{ } [ ] { } [ ] { } { }eeeeeee PUKUCUM =++ &&&
[ ]{ } [ ] { } [ ] { } { }FUKUCUM =++ &&&
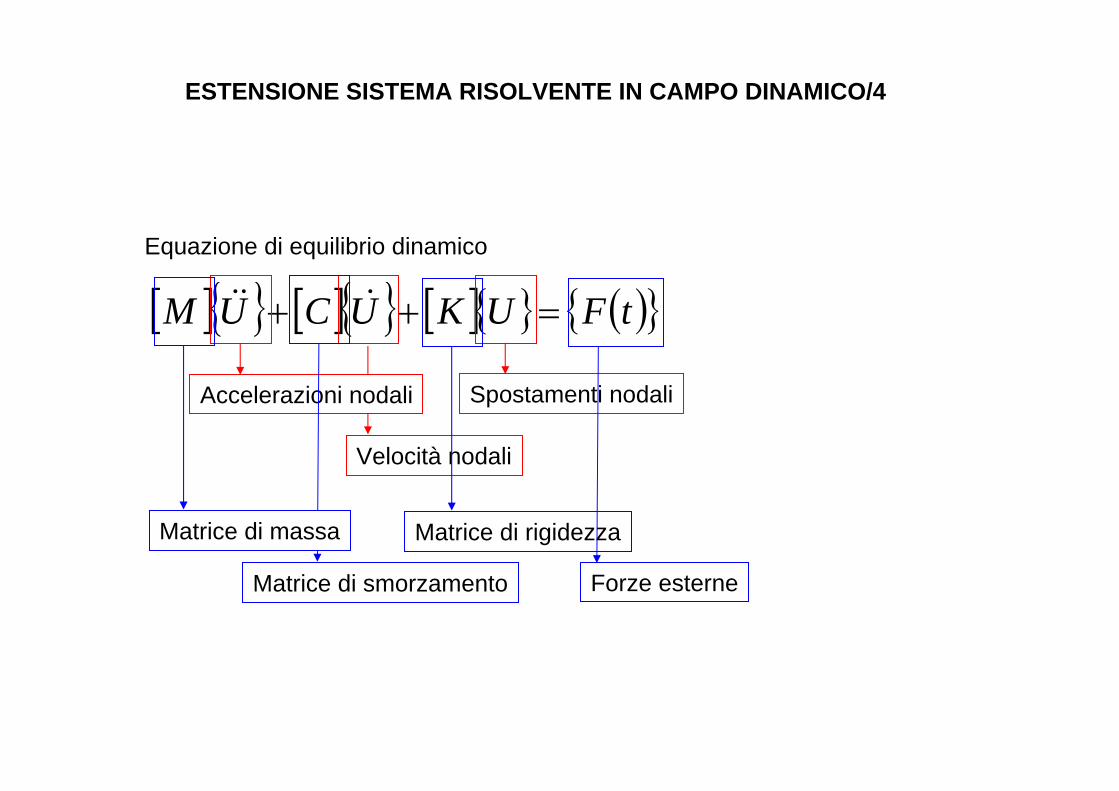
Equazione di equilibrio dinamico
[ ]{ } [ ]{ } [ ]{ } ( ){ }tFUKUCUM =++ &&&
Velocità nodali
Spostamenti nodali
Matrice di rigidezza
Forze esterne
Accelerazioni nodali
Matrice di smorzamento
Matrice di massa
ESTENSIONE SISTEMA RISOLVENTE IN CAMPO DINAMICO/4
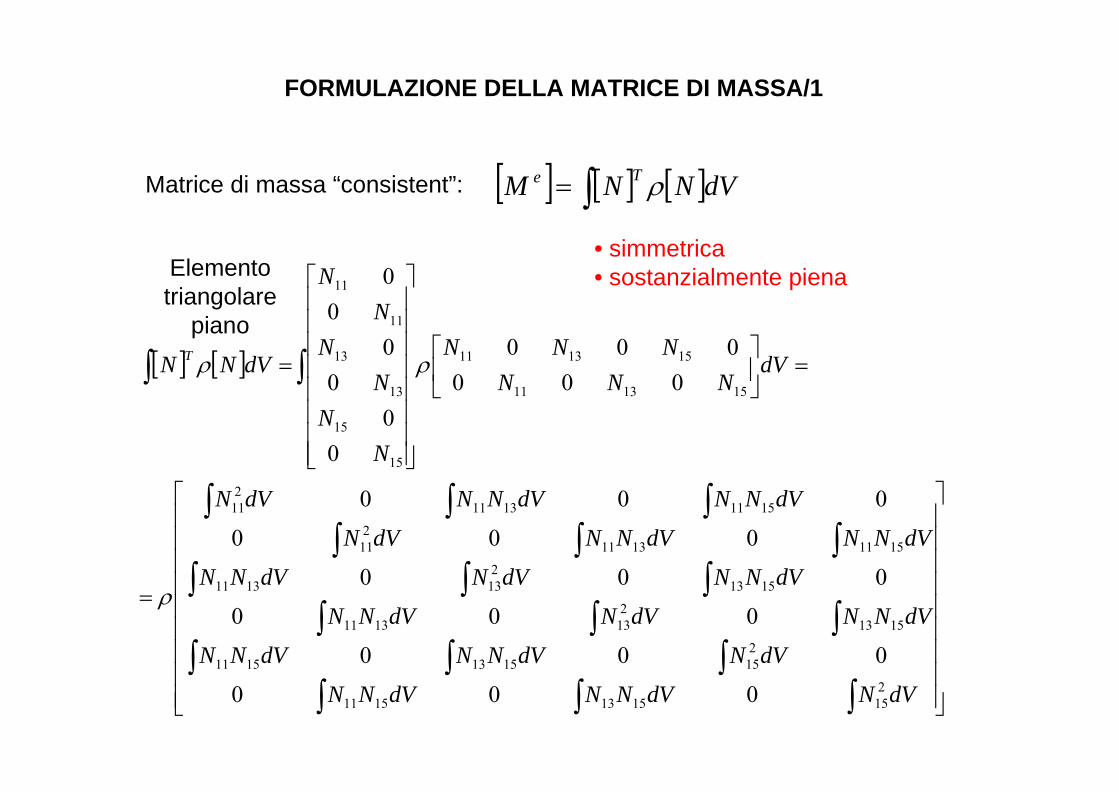
FORMULAZIONE DELLA MATRICE DI MASSA/1
Matrice di massa “consistent”: [ ] [ ] [ ]∫= dVNNM Te ρ
[ ] [ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
=⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
∫∫∫∫∫∫
∫∫∫∫∫∫
∫∫∫∫∫∫
∫∫
dVNdVNNdVNN
dVNdVNNdVNN
dVNNdVNdVNN
dVNNdVNdVNN
dVNNdVNNdVN
dVNNdVNNdVN
dVNNN
NNN
NN
NN
NN
dVNN T
21515131511
21515131511
15132
131311
15132
131311
151113112
11
151113112
11
151311
151311
15
15
13
13
11
11
000
000
000
000
000
000
000000
00
00
00
ρ
ρρ
Elemento triangolare
piano
• simmetrica• sostanzialmente piena
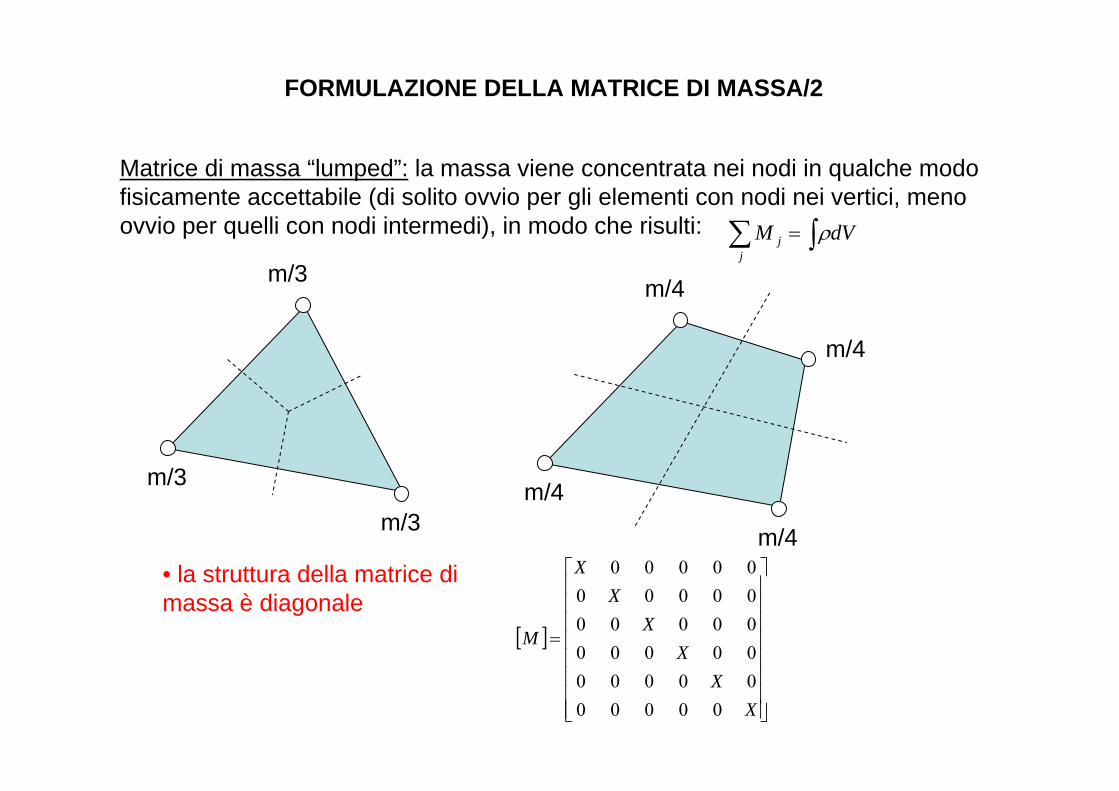
FORMULAZIONE DELLA MATRICE DI MASSA/2
Matrice di massa “lumped”: la massa viene concentrata nei nodi in qualche modo fisicamente accettabile (di solito ovvio per gli elementi con nodi nei vertici, meno ovvio per quelli con nodi intermedi), in modo che risulti:
• la struttura della matrice di massa è diagonale
m/3
m/3
m/3
∫∑ = dVMj
j ρ
m/4
m/4
m/4
m/4
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
XX
XX
XX
M
000000000000000000000000000000
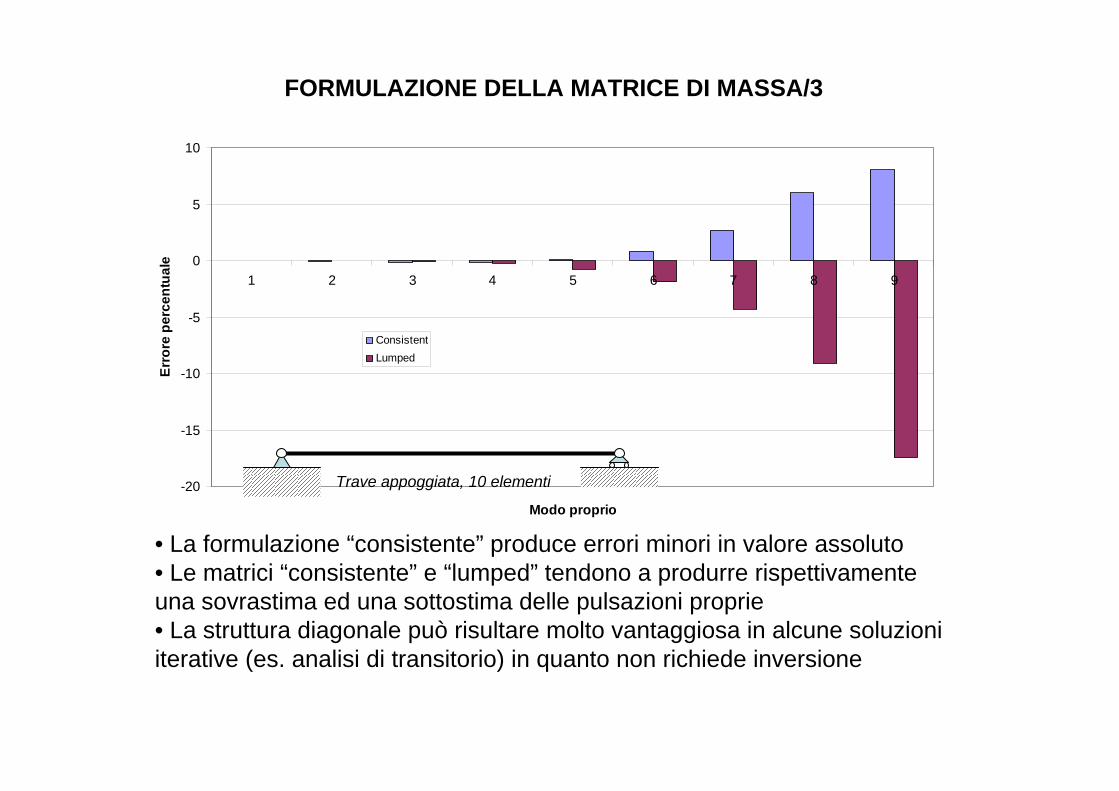
FORMULAZIONE DELLA MATRICE DI MASSA/3
• La formulazione “consistente” produce errori minori in valore assoluto• Le matrici “consistente” e “lumped” tendono a produrre rispettivamente una sovrastima ed una sottostima delle pulsazioni proprie• La struttura diagonale può risultare molto vantaggiosa in alcune soluzioni iterative (es. analisi di transitorio) in quanto non richiede inversione
-20
-15
-10
-5
0
5
10
1 2 3 4 5 6 7 8 9
Modo proprio
Erro
re p
erce
ntua
le
ConsistentLumped
Trave appoggiata, 10 elementi
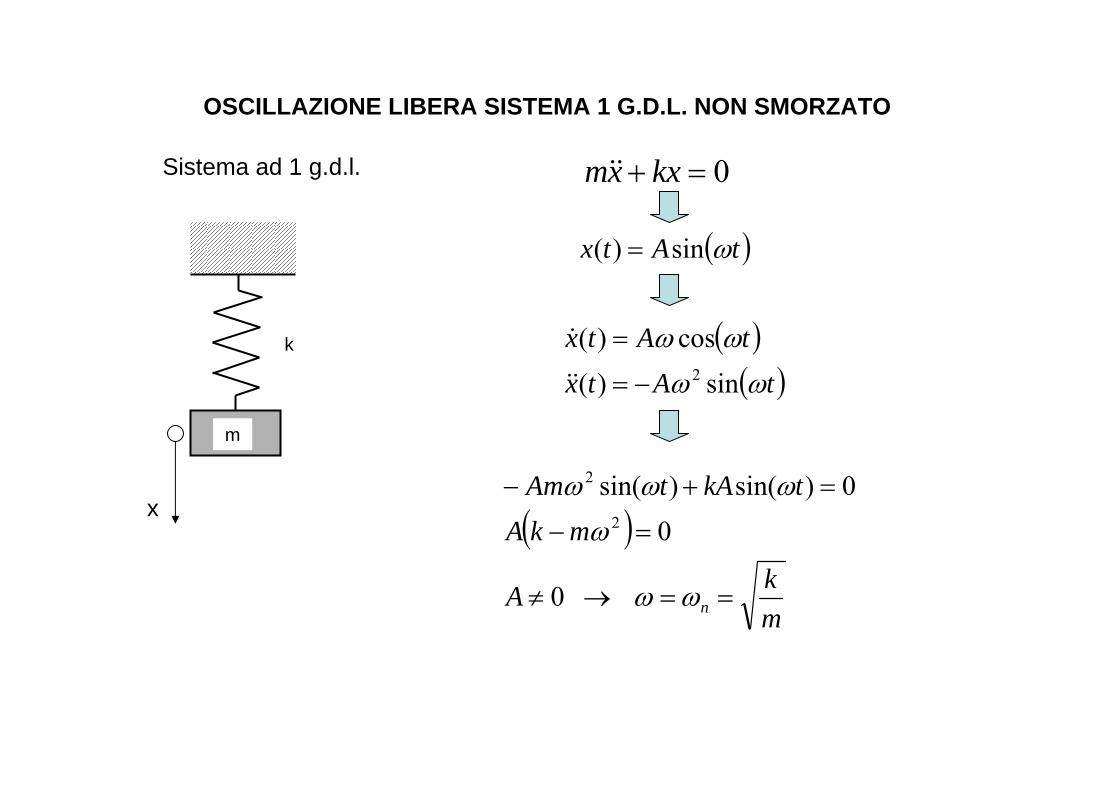
OSCILLAZIONE LIBERA SISTEMA 1 G.D.L. NON SMORZATO
Sistema ad 1 g.d.l.
x
m
k
0=+ kxxm &&
( )tAtx ωsin)( =
( )( )tAtxtAtxωω
ωω
sin)(cos)(
2−=
=
&&
&
( )
mkA
mkAtkAtAm
n ==→≠
=−
=+−
ωω
ω
ωωω
0
00)sin()sin(
2
2
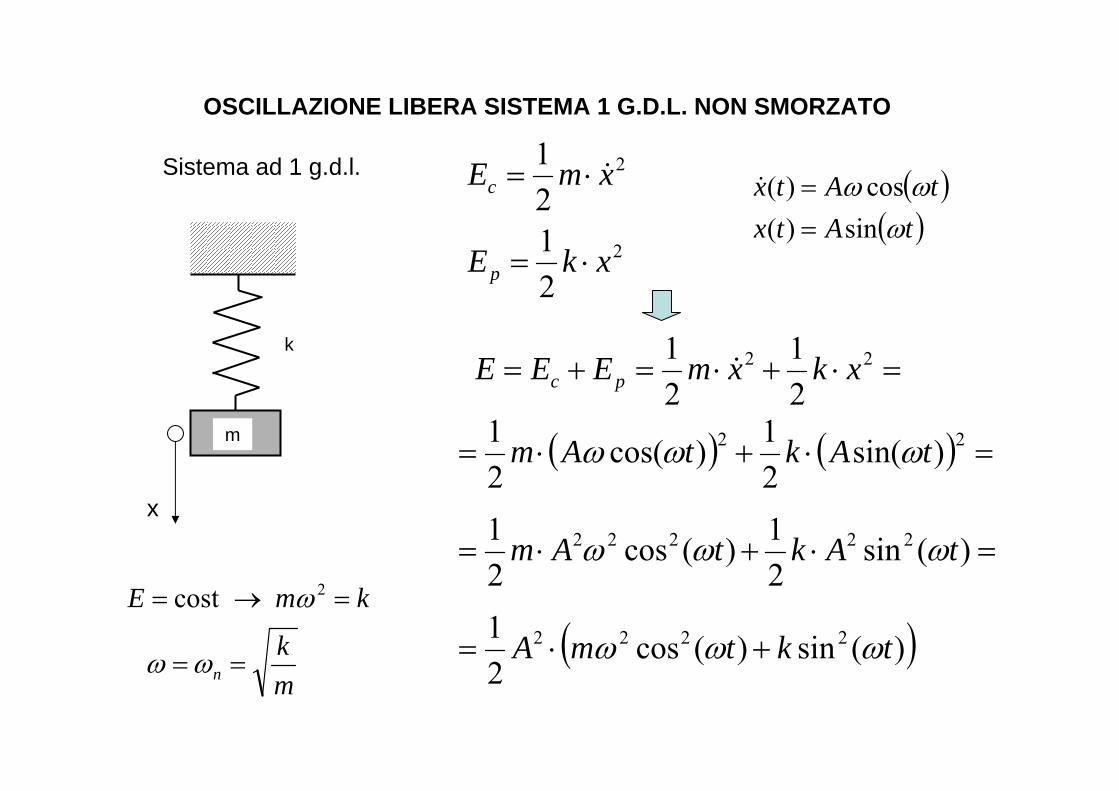
OSCILLAZIONE LIBERA SISTEMA 1 G.D.L. NON SMORZATO
Sistema ad 1 g.d.l.
x
m
k
2
2
2121
xkE
xmE
p
c
⋅=
⋅= & ( )( )tAtx
tAtxω
ωωsin)(
cos)(==&
( ))(sin)(cos21 2222 tktmA ωωω +⋅=
mk
kmE
n ==
=→=
ωω
ω 2cost
( ) ( ) =⋅+⋅= 22 )sin(21)cos(
21 tAktAm ωωω
=⋅+⋅=+= 22
21
21 xkxmEEE pc &
=⋅+⋅= )(sin21)(cos
21 22222 tAktAm ωωω
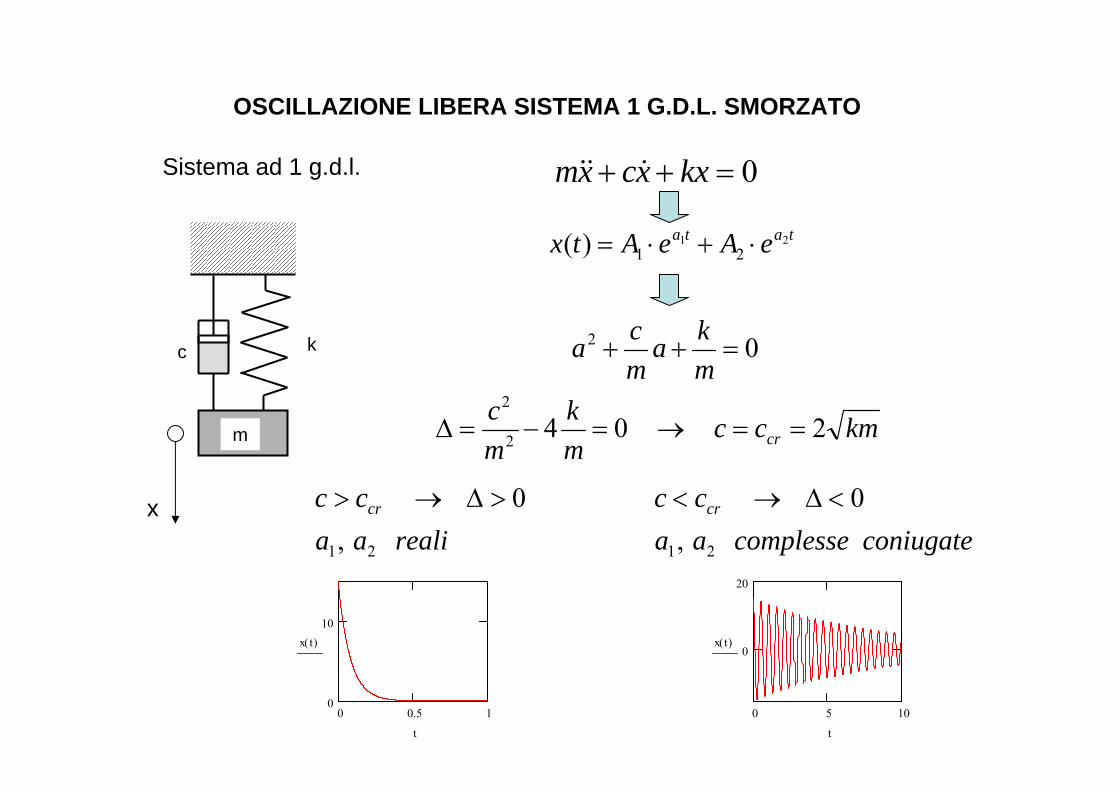
OSCILLAZIONE LIBERA SISTEMA 1 G.D.L. SMORZATO
Sistema ad 1 g.d.l.
x
m
c k
0=++ kxxcxm &&&
tata eAeAtx 2121)( ⋅+⋅=
02 =++mka
mca
kmccmk
mc
cr 2042
2
==→=−=Δ
coniugatecomplesseaacc cr
21,0<Δ→<
0 5 10
0
20
x t( )
t
realiaacc cr
21,0>Δ→>
0 0.5 10
10x t( )
t
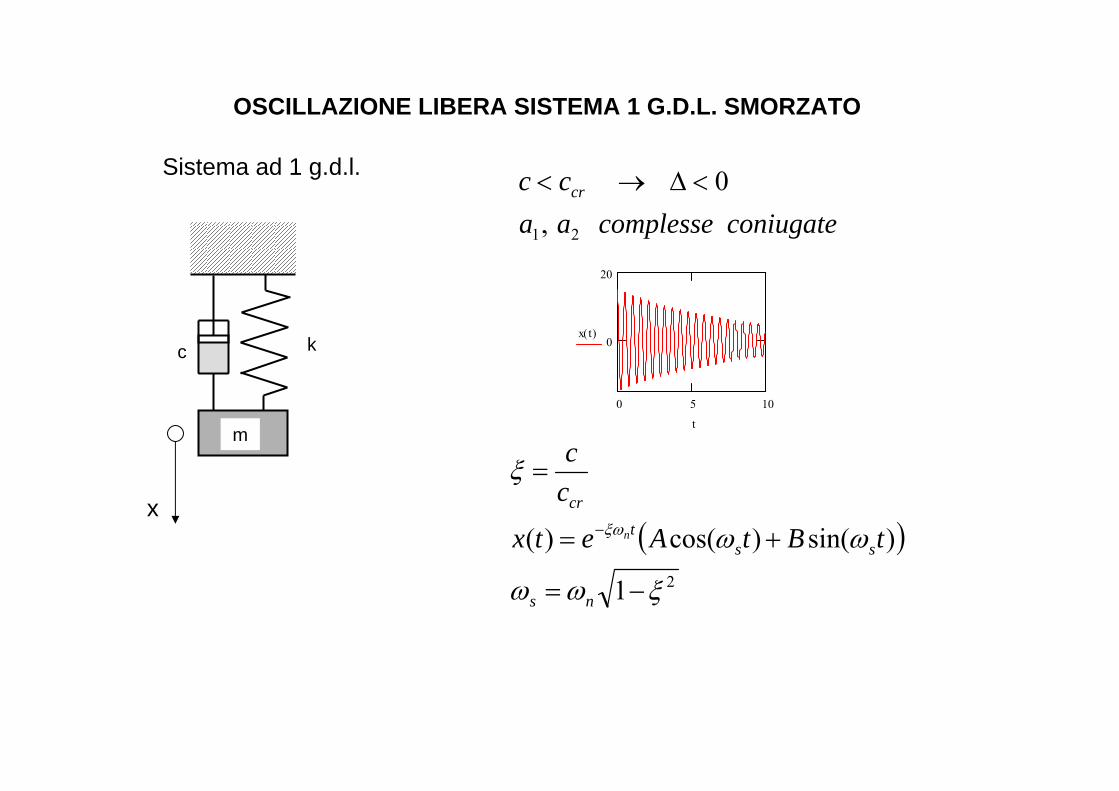
OSCILLAZIONE LIBERA SISTEMA 1 G.D.L. SMORZATO
Sistema ad 1 g.d.l.
x
m
c k
( )21
)sin()cos()(
ξωω
ωω
ξ
ξω
−=
+=
=
−
ns
sst
cr
tBtAetx
cc
n
coniugatecomplesseaacc cr
21,0<Δ→<
0 5 10
0
20
x t( )
t
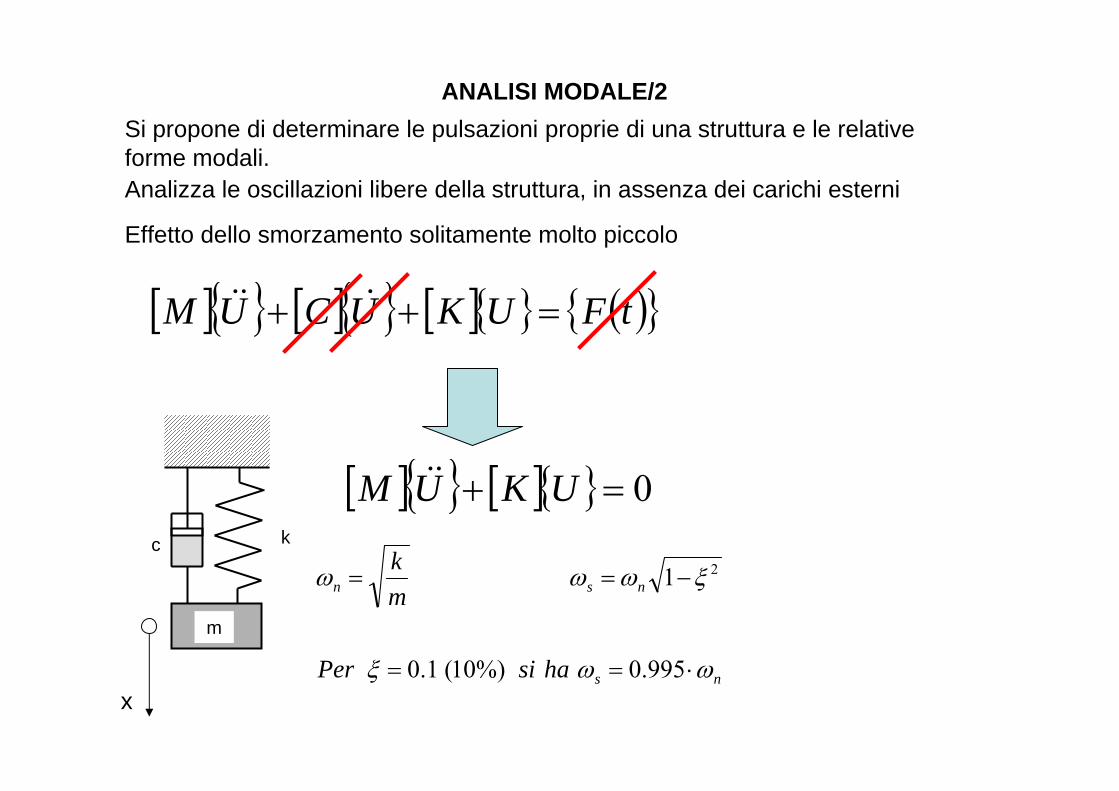
ANALISI MODALE/2
Analizza le oscillazioni libere della struttura, in assenza dei carichi esterni
[ ]{ } [ ]{ } [ ]{ } ( ){ }tFUKUCUM =++ &&&
Effetto dello smorzamento solitamente molto piccolo
[ ]{ } [ ]{ } 0=+ UKUM &&
x
m
c k
ns
nsn
hasiPer
mk
ωωξ
ξωωω
⋅==
−==
995.0%)10(1.0
1 2
Si propone di determinare le pulsazioni proprie di una struttura e le relative forme modali.
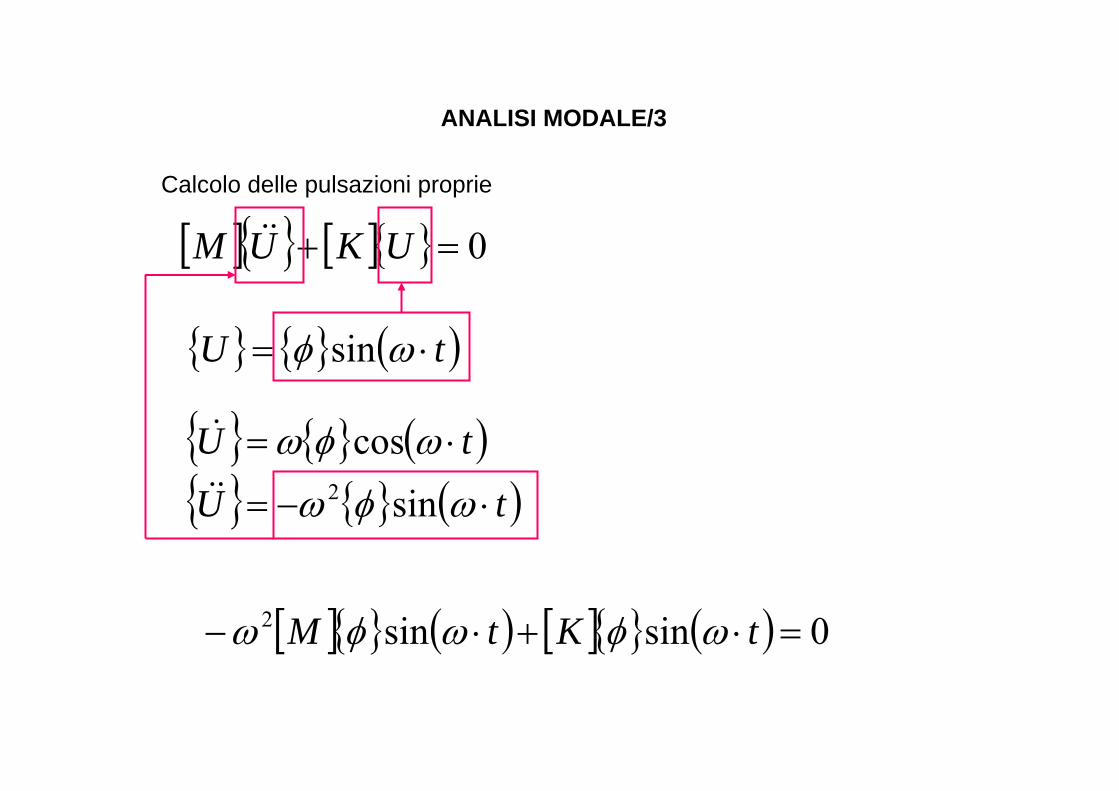
ANALISI MODALE/3
[ ]{ } [ ]{ } 0=+ UKUM &&
Calcolo delle pulsazioni proprie
{ } { } ( )tU ⋅= ωφ sin
{ } { } ( ){ } { } ( )tU
tU⋅−=
⋅=
ωφω
ωφω
sincos
2&&
&
[ ]{ } ( ) [ ]{ } ( ) 0sinsin2 =⋅+⋅− tKtM ωφωφω
ANALISI MODALE/4
Calcolo delle pulsazioni proprie
[ ]{ } ( ) [ ]{ } ( ) 0sinsin2 =⋅+⋅− tKtM ωφωφω
[ ] [ ]( ){ } 02 =− φω MK
Sistema lineare omogeneo nelle incognite { }φ
[ ] [ ]( ) { }⎩⎨⎧
∞==≠
−soluzioni
soluzioneMK
0010
det 2 φω
ANALISI MODALE/5
[ ] [ ]( ){ } 02 =− φω MK
[ ] [ ]( ) 0det 2 =− MK ω
( ) ( ) ( ) 0... 21
222
121
2 =+⋅++⋅+⋅+ −
−−
nnnnn aaaa ωωωω
Radici
ni ωωωωω ≤≤≤≤≤ ......321
{ } { } { } { } { }ni φφφφφ ......321 Forme modali
ANALISI MODALE/6
[ ] [ ]( ){ } 02 =− φω MK i
n-1 equazioni indipendenti n incognite
1∞ soluzioni
{ }
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
in
i
i
i
ϕ
ϕϕ
φ2
1
Le componenti della forma modale sono note a meno di una costante
Rappresentano solo la forma della deformata, non i valori effettivi degli spostamenti
Normalizzazioni tipiche
{ } [ ]{ }⎪⎩
⎪⎨
⎧
=
=
1
1max
iT
i
ij
M φφ
ϕ
ANALISI MODALE/7
Struttura reale(continuo)
Modello ad EF(discretizzato)
∞ pulsazioni proprie n gradi di libertà
n pulsazioni proprie
Relazione ?
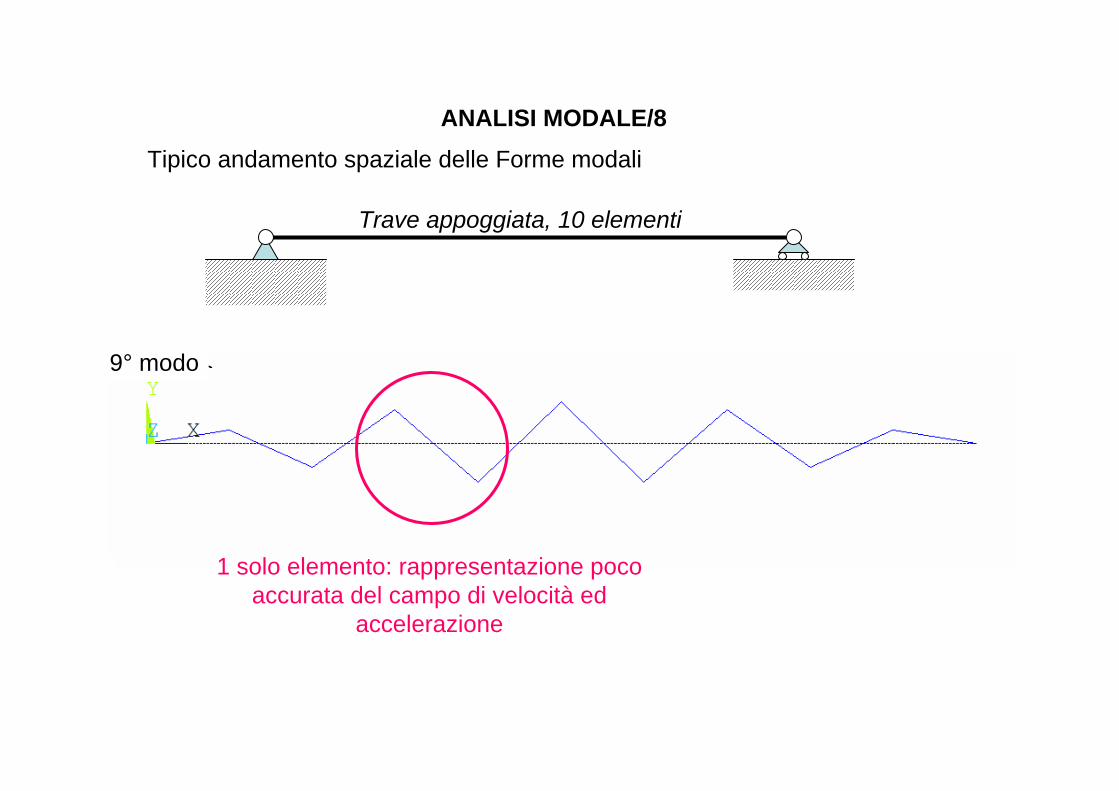
ANALISI MODALE/8Tipico andamento spaziale delle Forme modali
1° modo2° modo5° modo9° modo
1 solo elemento: rappresentazione poco accurata del campo di velocità ed
accelerazione
Trave appoggiata, 10 elementi
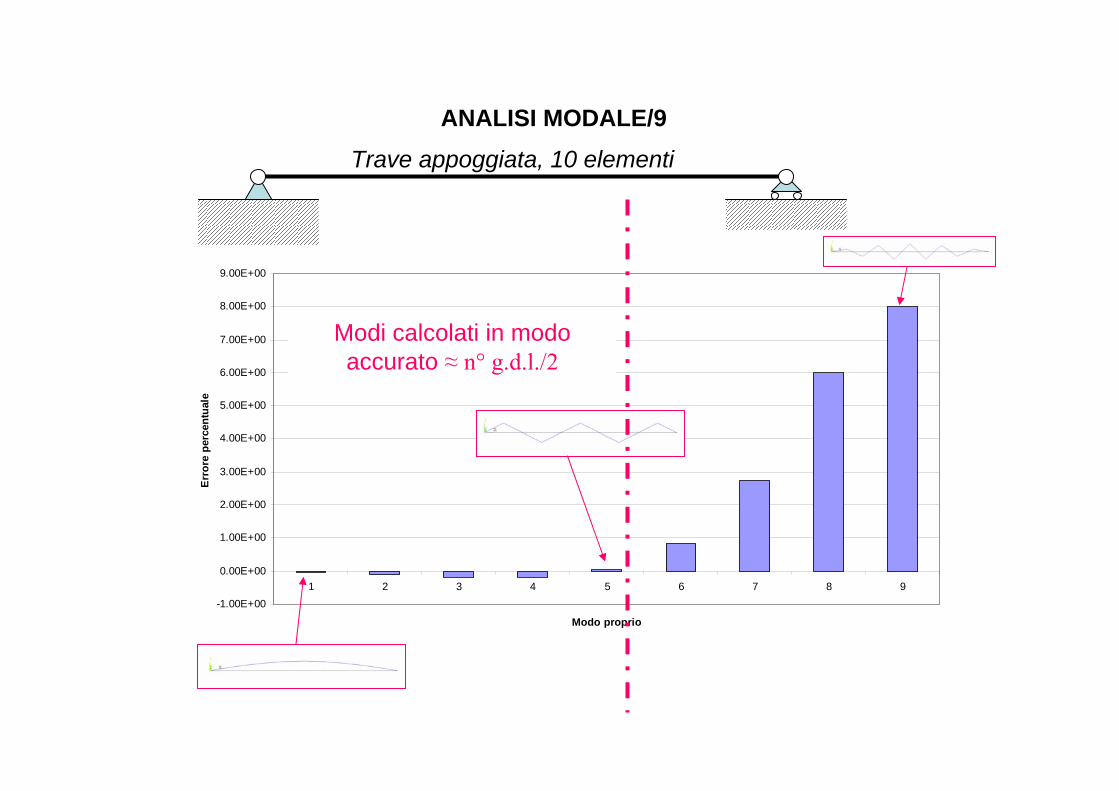
ANALISI MODALE/9Trave appoggiata, 10 elementi
-1.00E+00
0.00E+00
1.00E+00
2.00E+00
3.00E+00
4.00E+00
5.00E+00
6.00E+00
7.00E+00
8.00E+00
9.00E+00
1 2 3 4 5 6 7 8 9
Modo proprio
Erro
re p
erce
ntua
le
Modi calcolati in modo accurato ≈ n° g.d.l./2
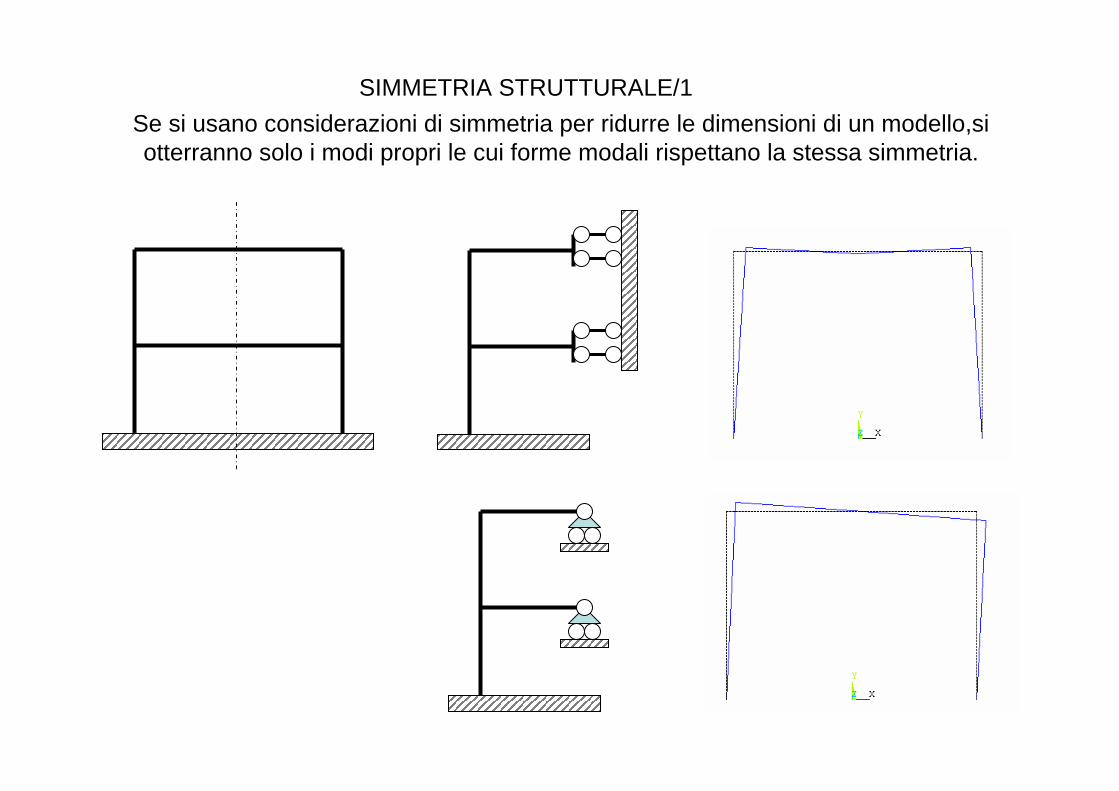
SIMMETRIA STRUTTURALE/1Se si usano considerazioni di simmetria per ridurre le dimensioni di un modello,si otterranno solo i modi propri le cui forme modali rispettano la stessa simmetria.
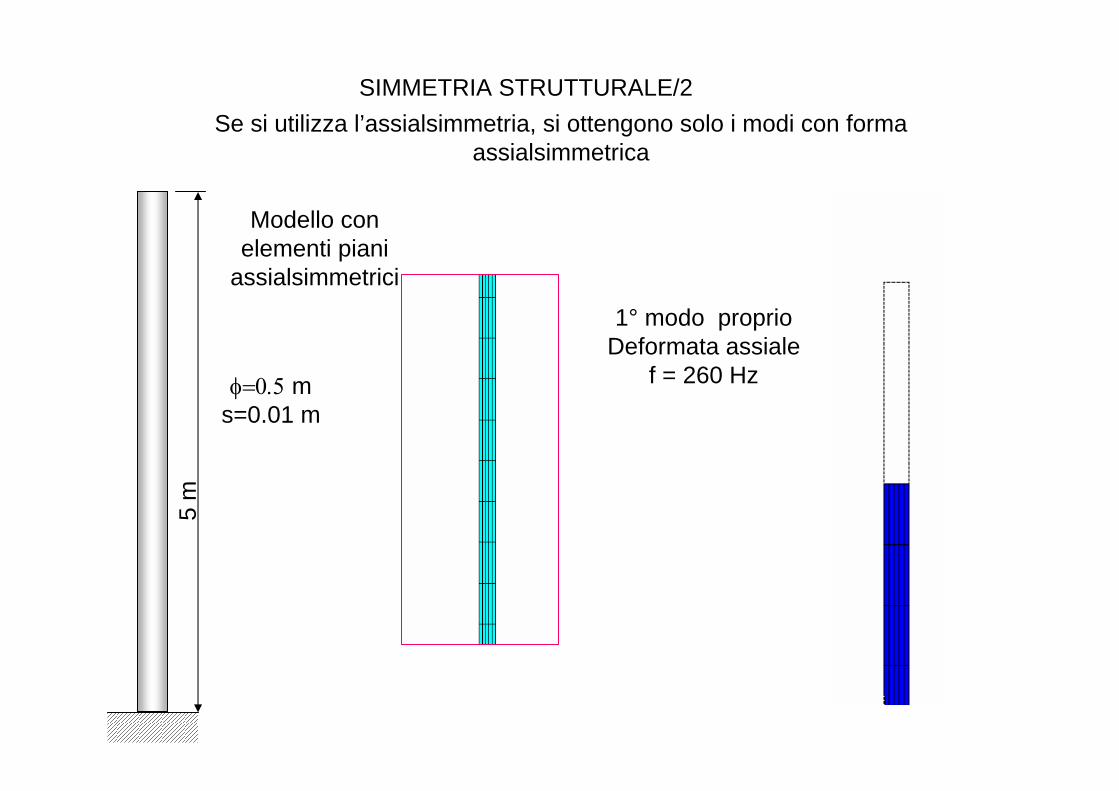
SIMMETRIA STRUTTURALE/2Se si utilizza l’assialsimmetria, si ottengono solo i modi con forma
assialsimmetrica5
m
φ=0.5 ms=0.01 m
1° modo proprioDeformata assiale
f = 260 Hz
Modello conelementi piani
assialsimmetrici
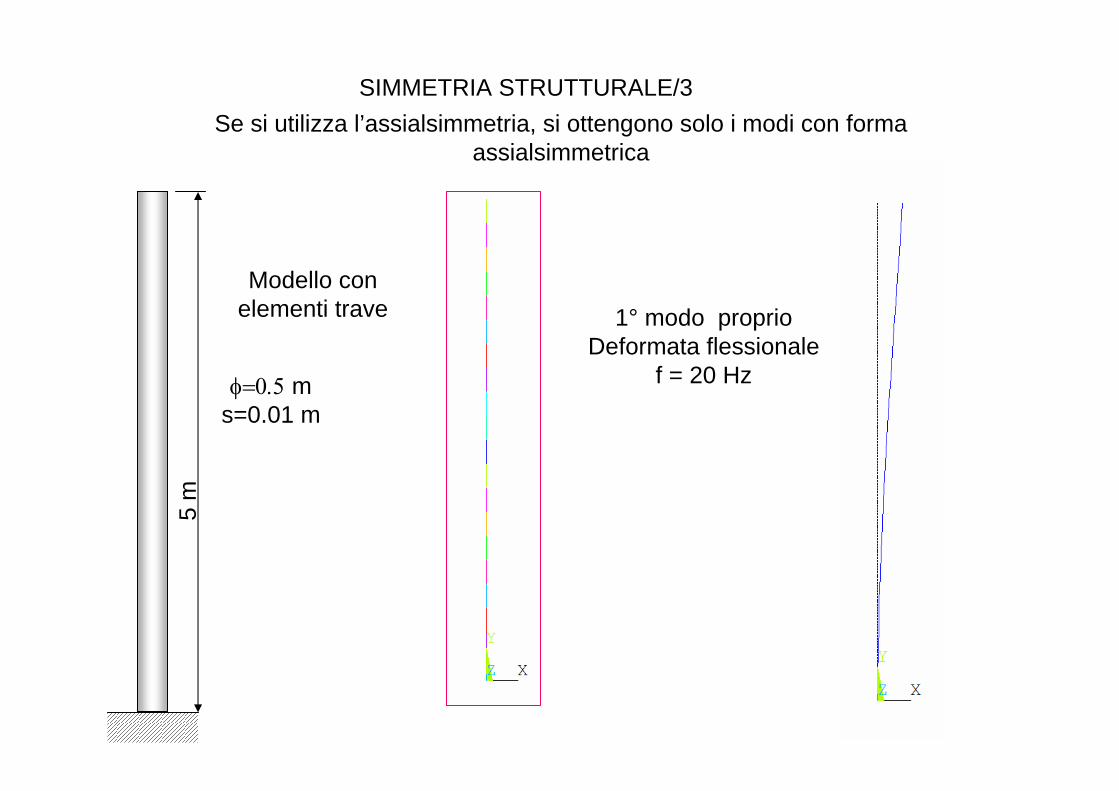
SIMMETRIA STRUTTURALE/3Se si utilizza l’assialsimmetria, si ottengono solo i modi con forma
assialsimmetrica5
m
φ=0.5 ms=0.01 m
1° modo proprioDeformata flessionale
f = 20 Hz
Modello conelementi trave
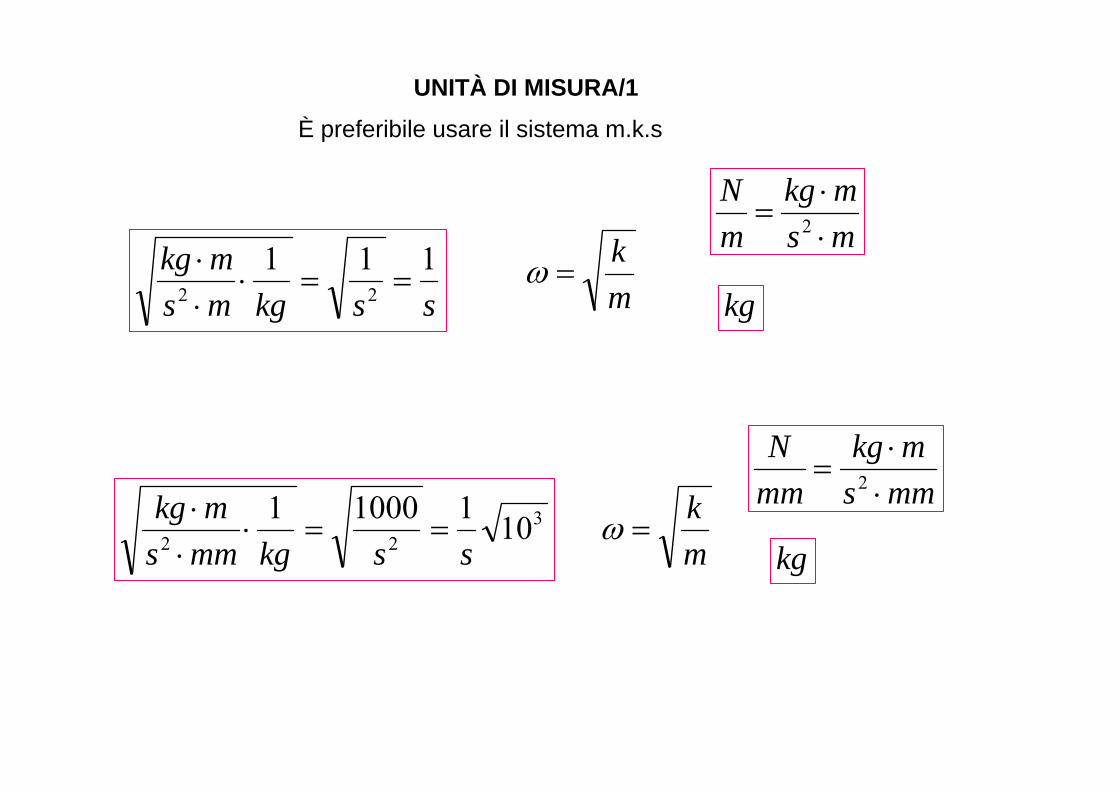
UNITÀ DI MISURA/1È preferibile usare il sistema m.k.s
mk
=ωmsmkg
mN
⋅⋅
= 2
kgsskgmsmkg 111
22 ==⋅⋅⋅
mk
=ωmmsmkg
mmN
⋅⋅
= 2
kg3
22 10110001sskgmms
mkg==⋅
⋅⋅
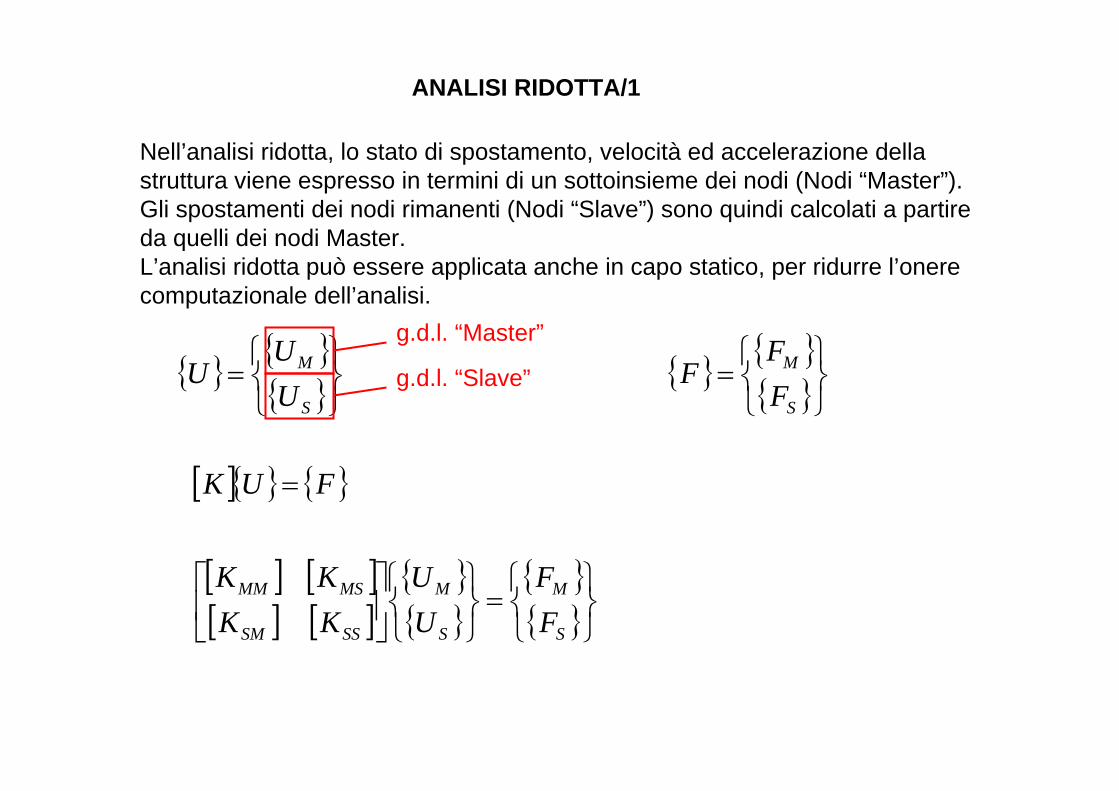
ANALISI RIDOTTA/1
Nell’analisi ridotta, lo stato di spostamento, velocità ed accelerazione dellastruttura viene espresso in termini di un sottoinsieme dei nodi (Nodi “Master”). Gli spostamenti dei nodi rimanenti (Nodi “Slave”) sono quindi calcolati a partireda quelli dei nodi Master.L’analisi ridotta può essere applicata anche in capo statico, per ridurre l’onerecomputazionale dell’analisi.
{ } { }{ }⎭
⎬⎫
⎩⎨⎧
=S
M
UU
U { } { }{ }⎭
⎬⎫
⎩⎨⎧
=S
M
FF
F
[ ]{ } { }FUK =
g.d.l. “Master”
g.d.l. “Slave”
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
S
M
S
M
SSSM
MSMM
FF
UU
KKKK
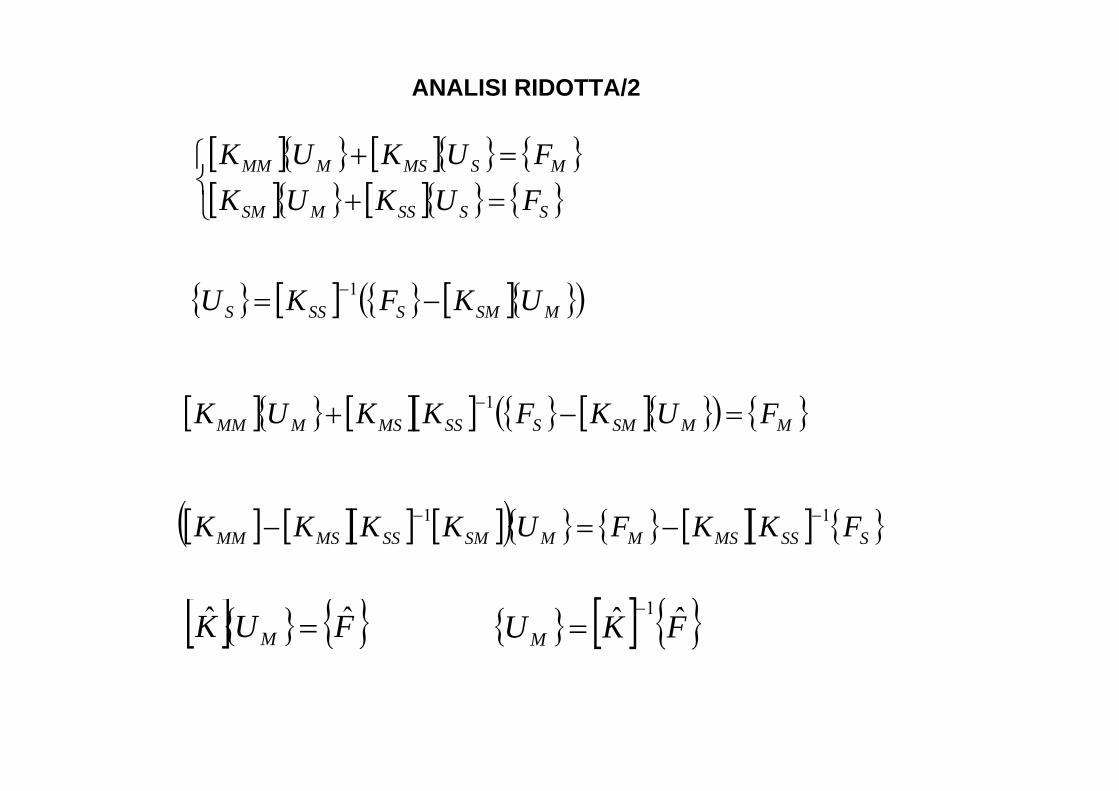
ANALISI RIDOTTA/2
[ ]{ } [ ]{ } { }[ ]{ } [ ]{ } { }⎩
⎨⎧
=+=+
SSSSMSM
MSMSMMM
FUKUKFUKUK
{ } [ ] { } [ ]{ }( )MSMSSSS UKFKU −= −1
[ ]{ } [ ][ ] { } [ ]{ }( ) { }MMSMSSSMSMMM FUKFKKUK =−+ −1
[ ] [ ][ ] [ ]( ){ } { } [ ][ ] { }SSSMSMMSMSSMSMM FKKFUKKKK 11 −− −=−
[ ]{ } { }FUK Mˆˆ = { } [ ] { }FKUM
ˆˆ 1−=
[ ] [ ][ ] [ ]
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+
+⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
S
M
S
M
SSSM
MSMM
S
M
SSSM
MSMM
S
M
SSSM
MSMM
FF
UU
KKKK
UU
CCCC
UU
MMMM
&
&
&&
&&
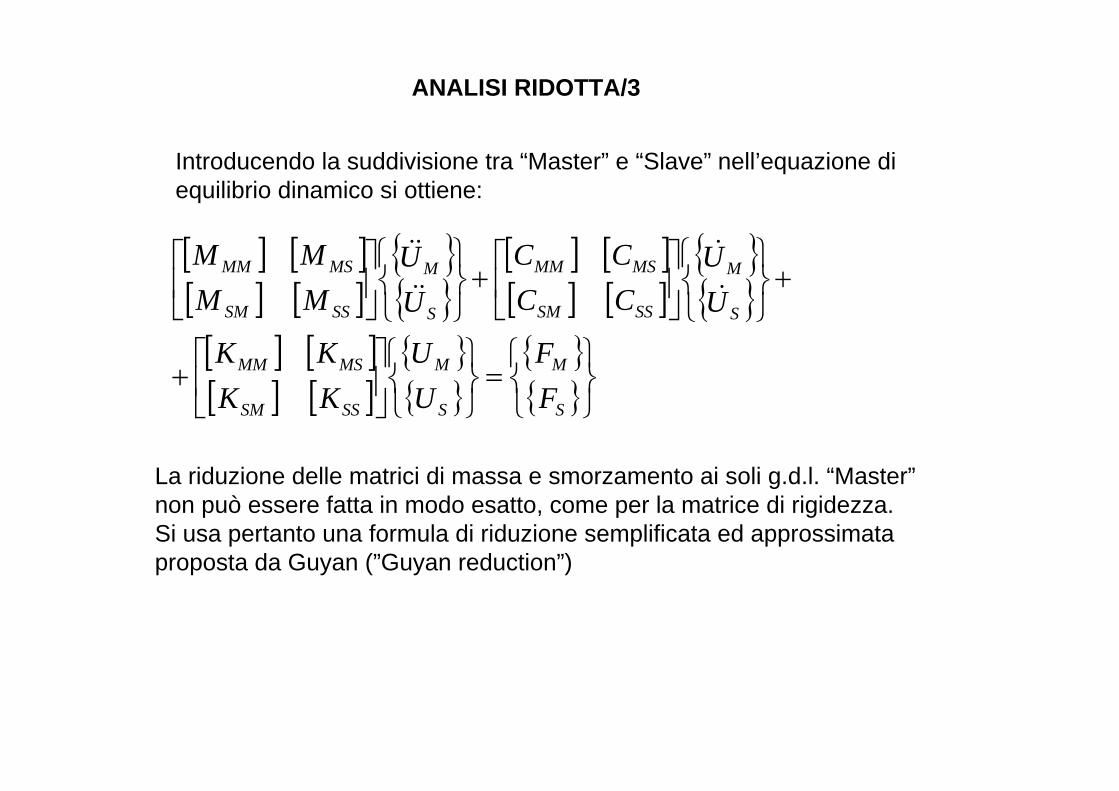
La riduzione delle matrici di massa e smorzamento ai soli g.d.l. “Master”non può essere fatta in modo esatto, come per la matrice di rigidezza.Si usa pertanto una formula di riduzione semplificata ed approssimata proposta da Guyan (”Guyan reduction”)
ANALISI RIDOTTA/3
Introducendo la suddivisione tra “Master” e “Slave” nell’equazione di equilibrio dinamico si ottiene:
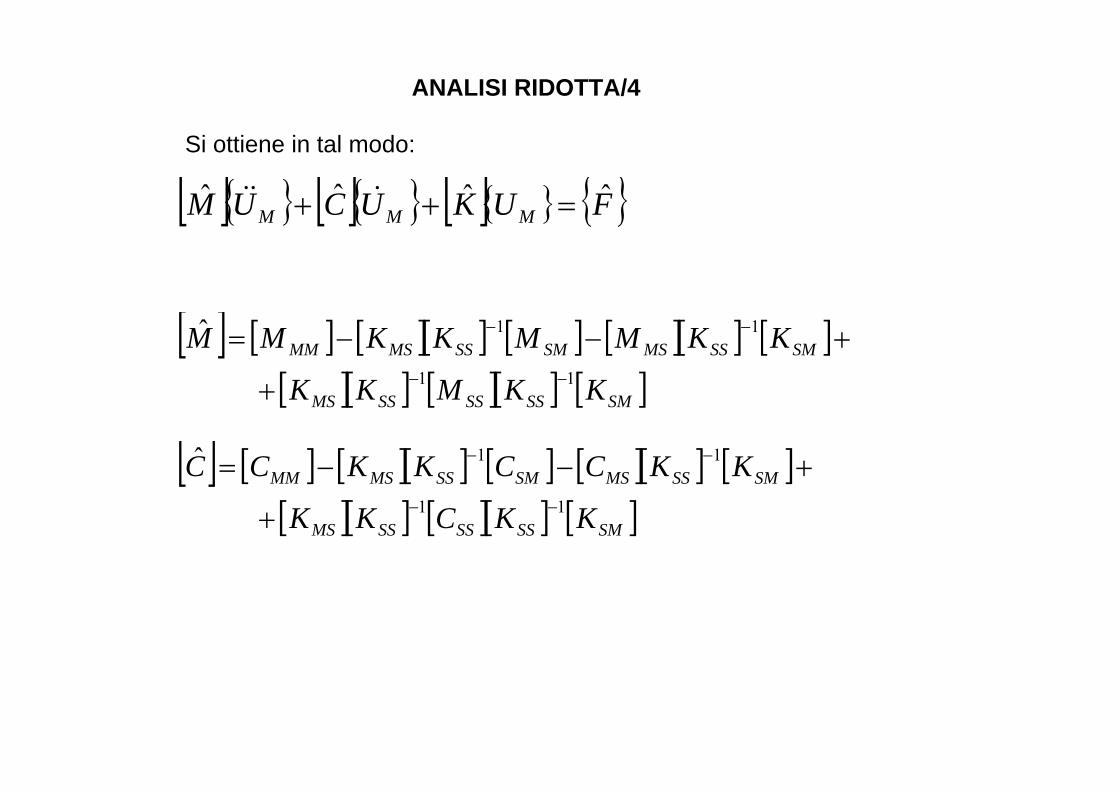
[ ]{ } [ ]{ } [ ]{ } { }FUKUCUM MMMˆˆˆˆ =++ &&&
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ][ ][ ] [ ][ ] [ ]SMSSSSSSMS
SMSSMSSMSSMSMM
KKMKK
KKMMKKMM11
11ˆ−−
−−
+
+−−=
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ][ ][ ] [ ][ ] [ ]SMSSSSSSMS
SMSSMSSMSSMSMM
KKCKK
KKCCKKCC11
11ˆ−−
−−
+
+−−=
Si ottiene in tal modo:
ANALISI RIDOTTA/4
ANALISI RIDOTTA/5
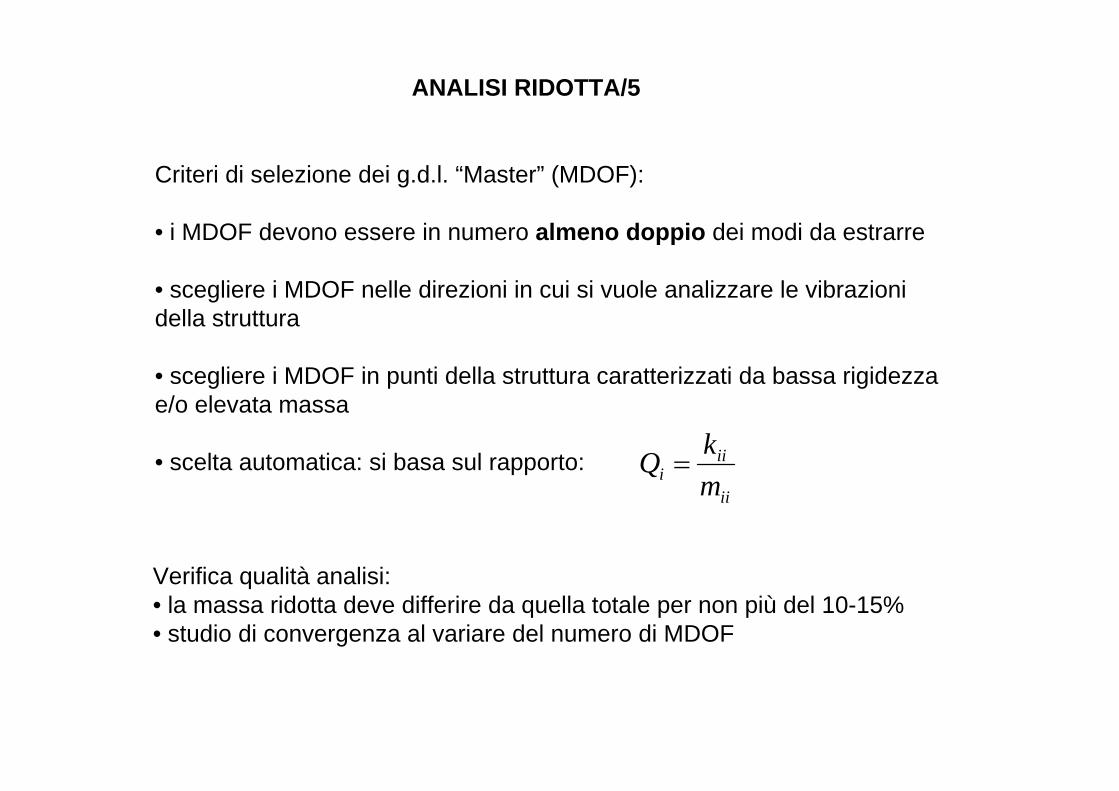
Criteri di selezione dei g.d.l. “Master” (MDOF):
• i MDOF devono essere in numero almeno doppio dei modi da estrarre
• scegliere i MDOF nelle direzioni in cui si vuole analizzare le vibrazioni della struttura
• scegliere i MDOF in punti della struttura caratterizzati da bassa rigidezza e/o elevata massa
• scelta automatica: si basa sul rapporto: ii
iii m
kQ =
Verifica qualità analisi: • la massa ridotta deve differire da quella totale per non più del 10-15%• studio di convergenza al variare del numero di MDOF
ANALISI RIDOTTA/6
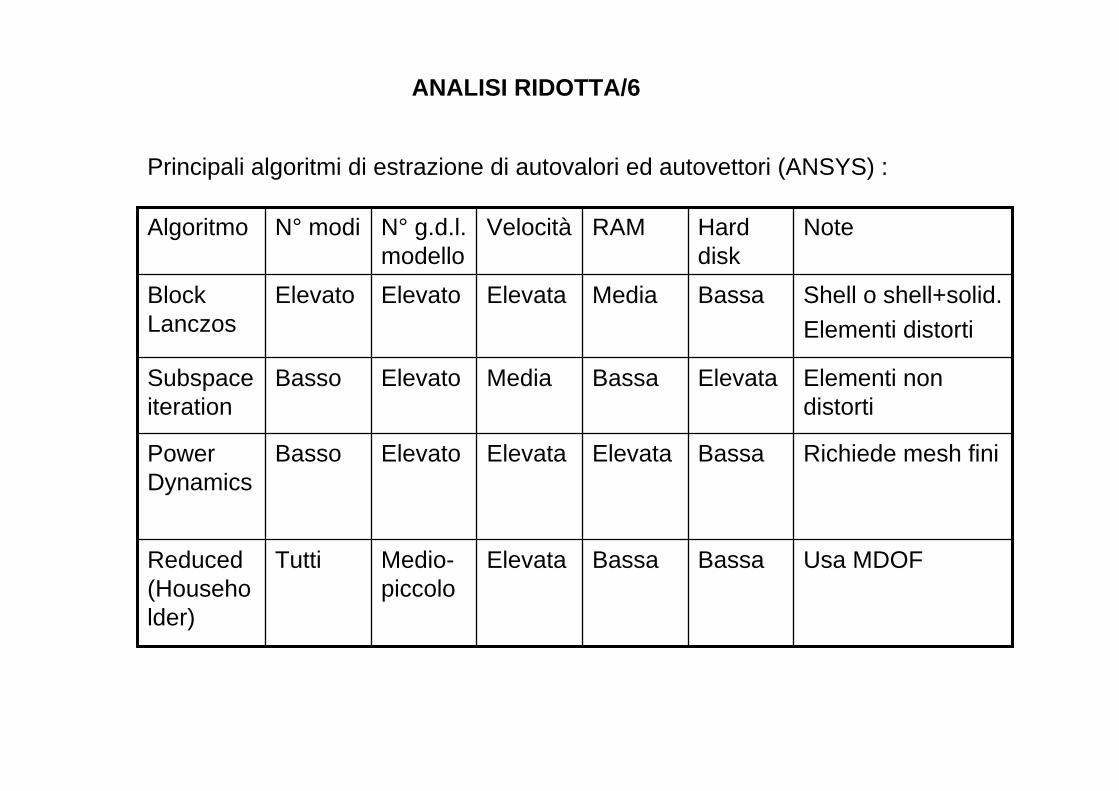
Principali algoritmi di estrazione di autovalori ed autovettori (ANSYS) :
Richiede mesh finiBassaElevataElevataElevatoBassoPower Dynamics
Bassa
Bassa
Media
RAM
Bassa
Elevata
Bassa
Hard disk
Usa MDOFElevataMedio-piccolo
TuttiReduced(Householder)
Elementi non distorti
MediaElevatoBassoSubspaceiteration
Shell o shell+solid.Elementi distorti
ElevataElevatoElevatoBlock Lanczos
NoteVelocitàN° g.d.l.modello
N° modiAlgoritmo
Potenziali applicazioni dell’analisi ridotta:
• riduzione degli oneri computazionali dell’analisi
• riduzione del numero di g.d.l. attivi nell’analisi modale, rispetto a quella statica, pur utilizzando un unico modello
• in modelli semplici, separazione dell’effetto dei diversi g.d.l. nodali (es. in una trave si possono analizzare separatamente i modi flessionali, estensionali, etc.)
ANALISI RIDOTTA/7
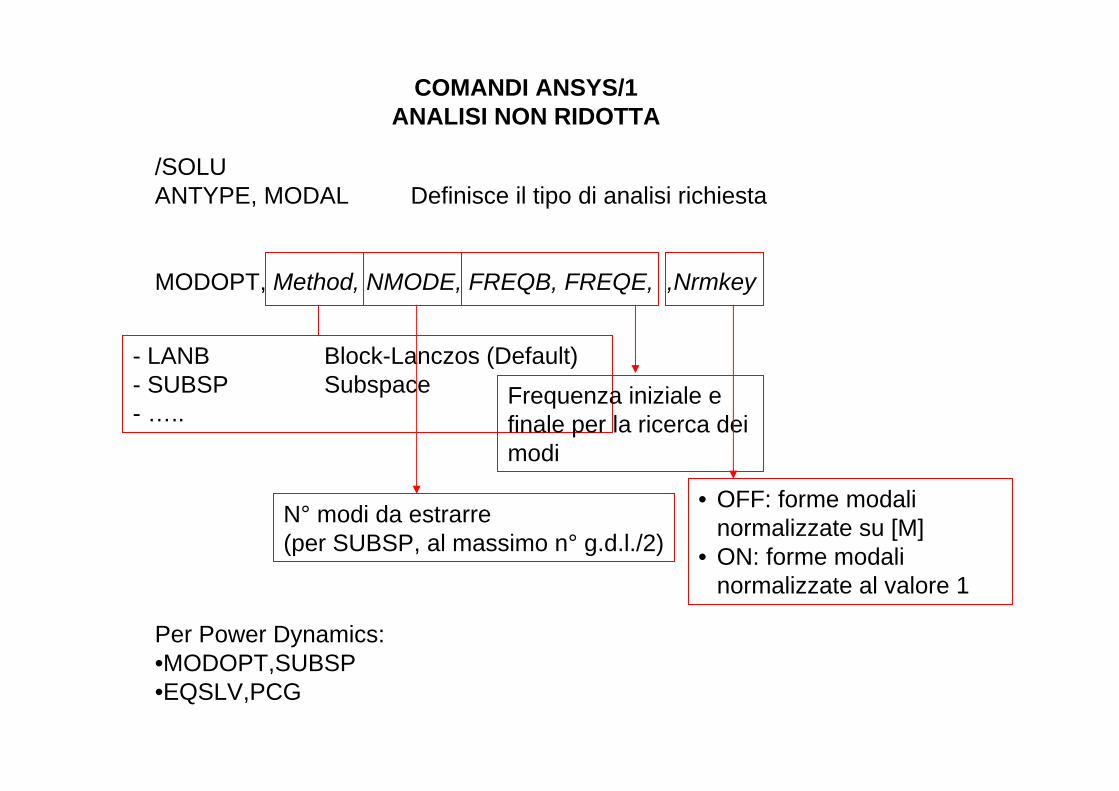
COMANDI ANSYS/1ANALISI NON RIDOTTA
/SOLUANTYPE, MODAL Definisce il tipo di analisi richiesta
MODOPT, Method, NMODE, FREQB, FREQE, ,Nrmkey
- LANB Block-Lanczos (Default)- SUBSP Subspace- …..
N° modi da estrarre(per SUBSP, al massimo n° g.d.l./2)
Frequenza iniziale e finale per la ricerca dei modi
• OFF: forme modali normalizzate su [M]
• ON: forme modali normalizzate al valore 1
Per Power Dynamics:•MODOPT,SUBSP•EQSLV,PCG
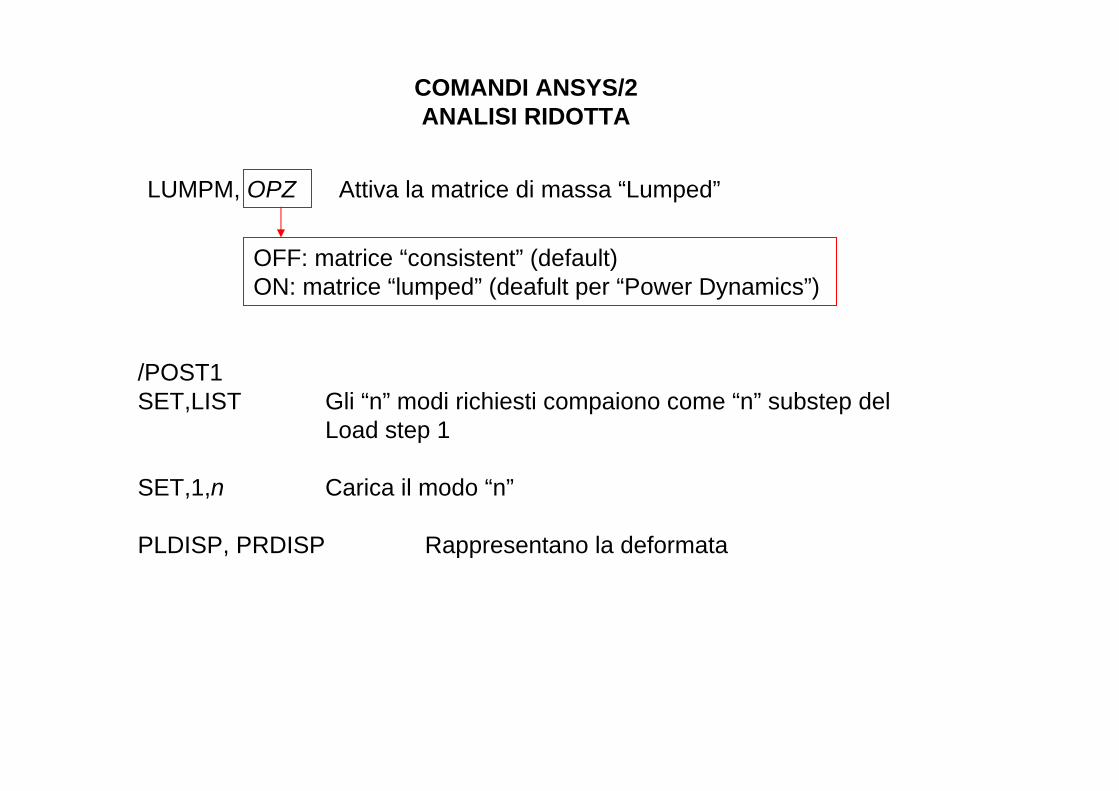
COMANDI ANSYS/2ANALISI RIDOTTA
LUMPM, OPZ Attiva la matrice di massa “Lumped”
OFF: matrice “consistent” (default)ON: matrice “lumped” (deafult per “Power Dynamics”)
/POST1SET,LIST Gli “n” modi richiesti compaiono come “n” substep del
Load step 1
SET,1,n Carica il modo “n”
PLDISP, PRDISP Rappresentano la deformata
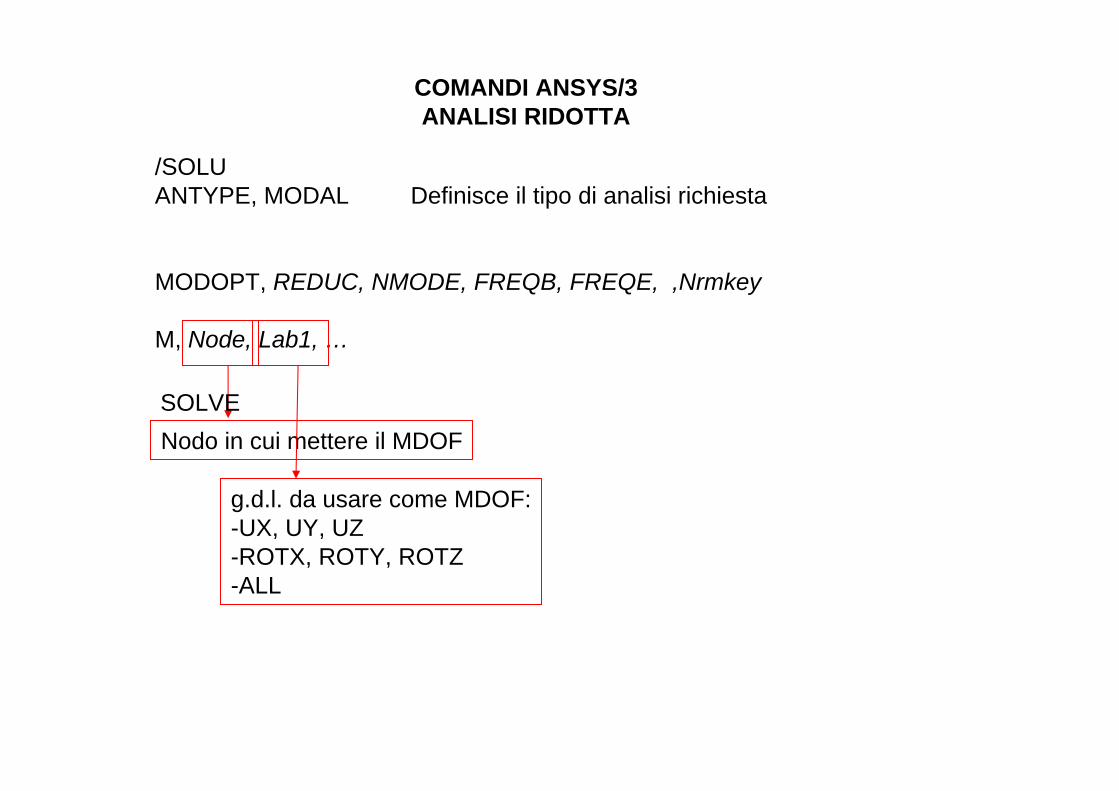
COMANDI ANSYS/3ANALISI RIDOTTA
/SOLUANTYPE, MODAL Definisce il tipo di analisi richiesta
MODOPT, REDUC, NMODE, FREQB, FREQE, ,Nrmkey
M, Node, Lab1, …
Nodo in cui mettere il MDOF
g.d.l. da usare come MDOF:-UX, UY, UZ-ROTX, ROTY, ROTZ-ALL
SOLVE
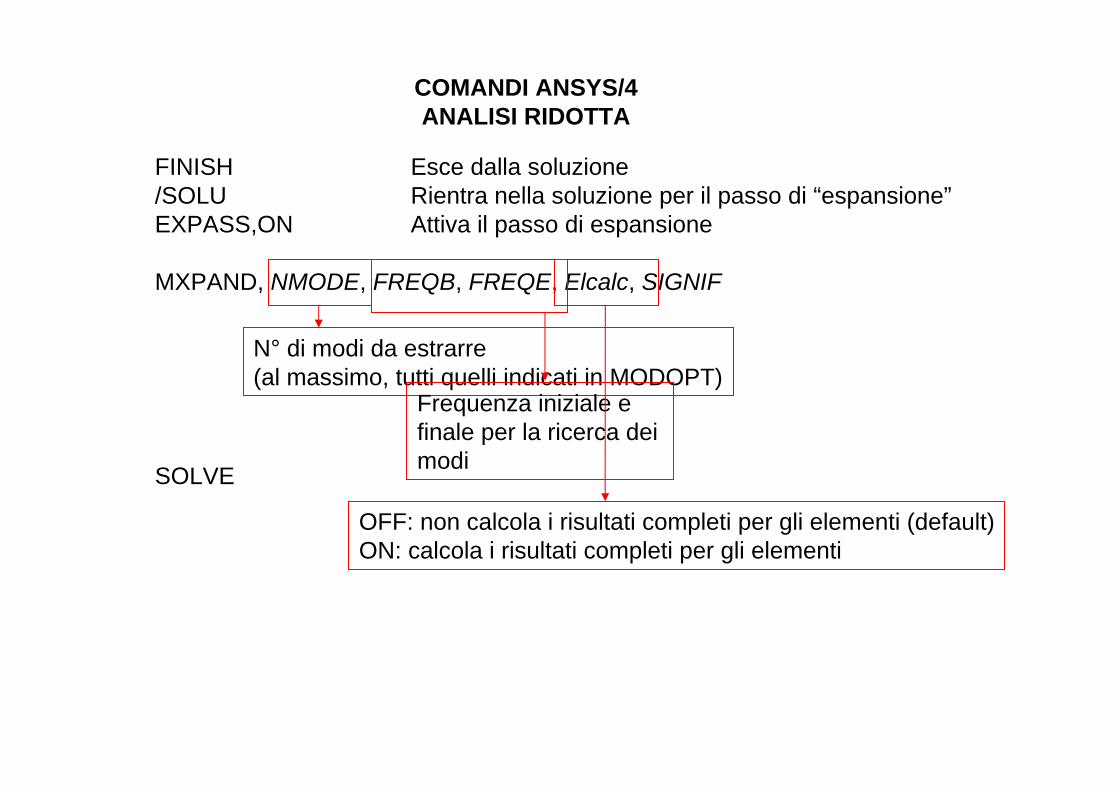
COMANDI ANSYS/4ANALISI RIDOTTA
FINISH Esce dalla soluzione/SOLU Rientra nella soluzione per il passo di “espansione”EXPASS,ON Attiva il passo di espansione
MXPAND, NMODE, FREQB, FREQE, Elcalc, SIGNIF
N° di modi da estrarre(al massimo, tutti quelli indicati in MODOPT)
SOLVE
Frequenza iniziale e finale per la ricerca dei modi
OFF: non calcola i risultati completi per gli elementi (default)ON: calcola i risultati completi per gli elementi
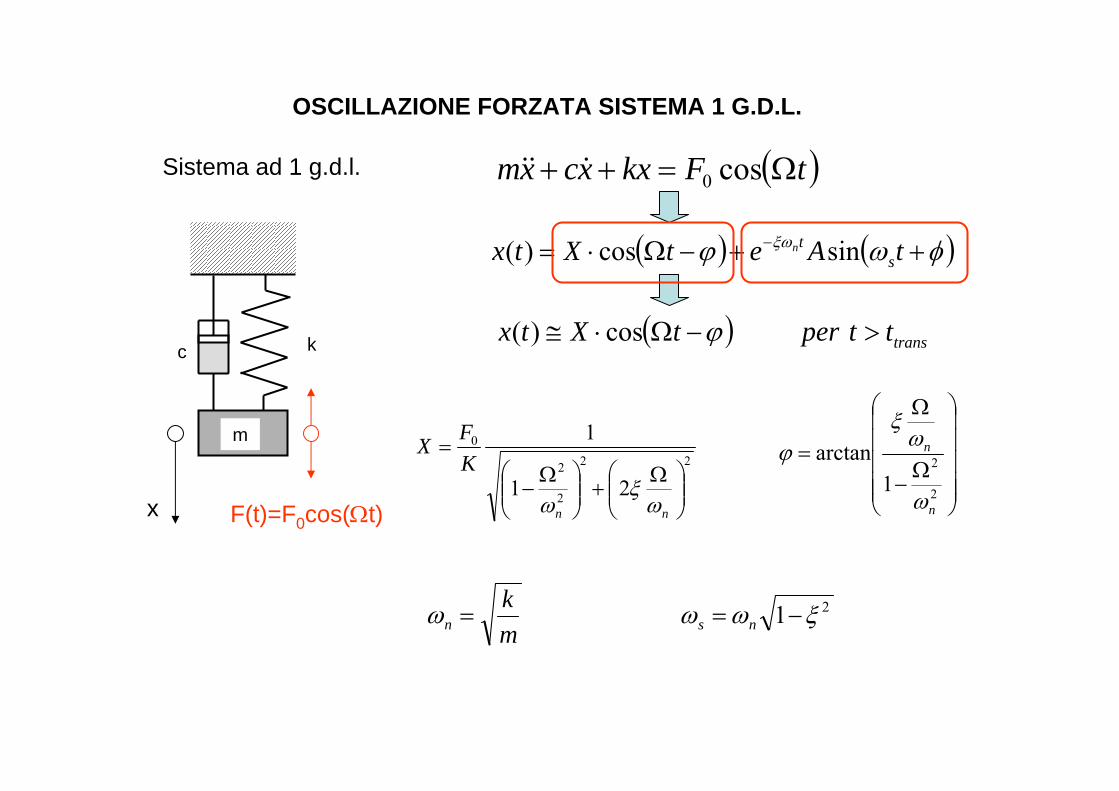
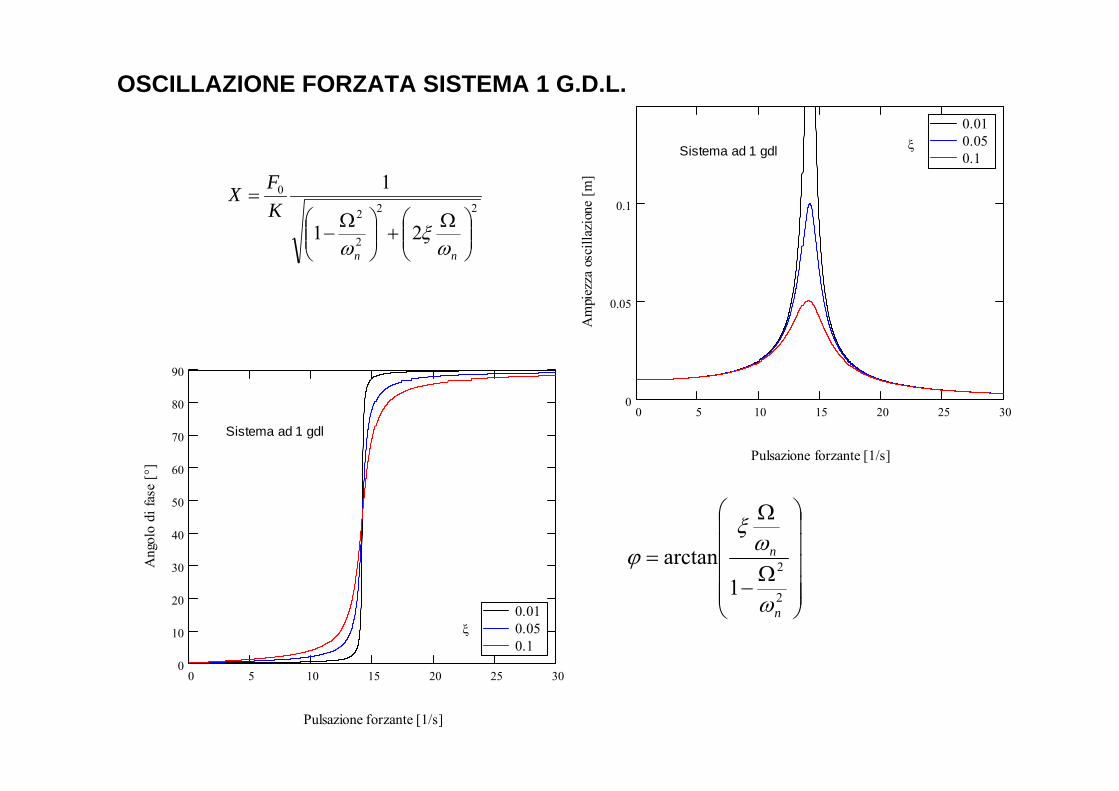
OSCILLAZIONE FORZATA SISTEMA 1 G.D.L.
Sistema ad 1 g.d.l.
F(t)=F0cos(Ωt)x
m
c k
( )tFkxxcxm Ω=++ cos0&&&
( ) ( )φωϕ ξω ++−Ω⋅= − tAetXtx stn sincos)(
21 ξωωω −== nsn mk
22
2
2
0
21
1
⎟⎟⎠
⎞⎜⎜⎝
⎛ Ω+⎟⎟
⎠
⎞⎜⎜⎝
⎛ Ω−
=
nn
KFX
ωξ
ω ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
Ω−
Ω
=
2
2
1arctan
n
n
ω
ωξ
ϕ
( ) transttpertXtx >−Ω⋅≅ ϕcos)(
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
Ω−
Ω
=
2
2
1arctan
n
n
ω
ωξ
ϕ
0 5 10 15 20 25 300
10
20
30
40
50
60
70
80
90
0.010.050.1
Pulsazione forzante [1/s]
Ang
olo
di fa
se [°
]
Sistema ad 1 gdl
ξ
22
2
2
0
21
1
⎟⎟⎠
⎞⎜⎜⎝
⎛ Ω+⎟⎟
⎠
⎞⎜⎜⎝
⎛ Ω−
=
nn
KFX
ωξ
ω
0 5 10 15 20 25 300
0.05
0.1
0.010.050.1
Pulsazione forzante [1/s]
Am
piez
za o
scill
azio
ne [m
]
ξSistema ad 1 gdl
OSCILLAZIONE FORZATA SISTEMA 1 G.D.L.
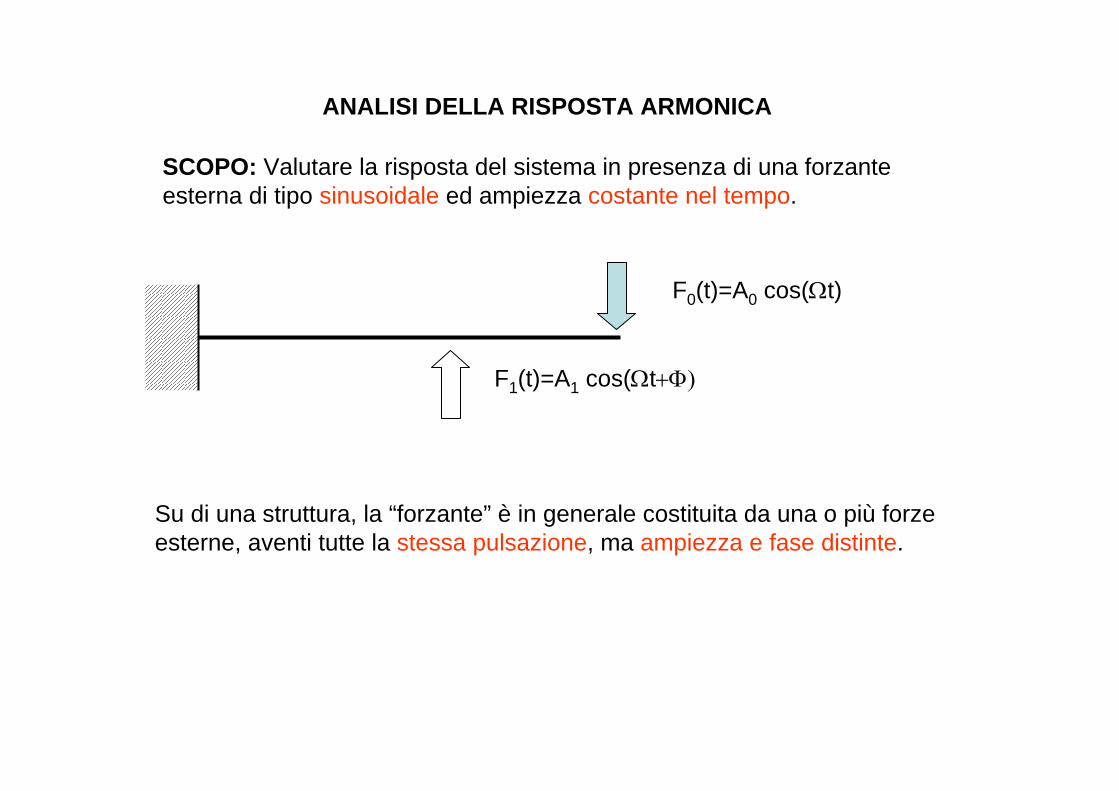
ANALISI DELLA RISPOSTA ARMONICA
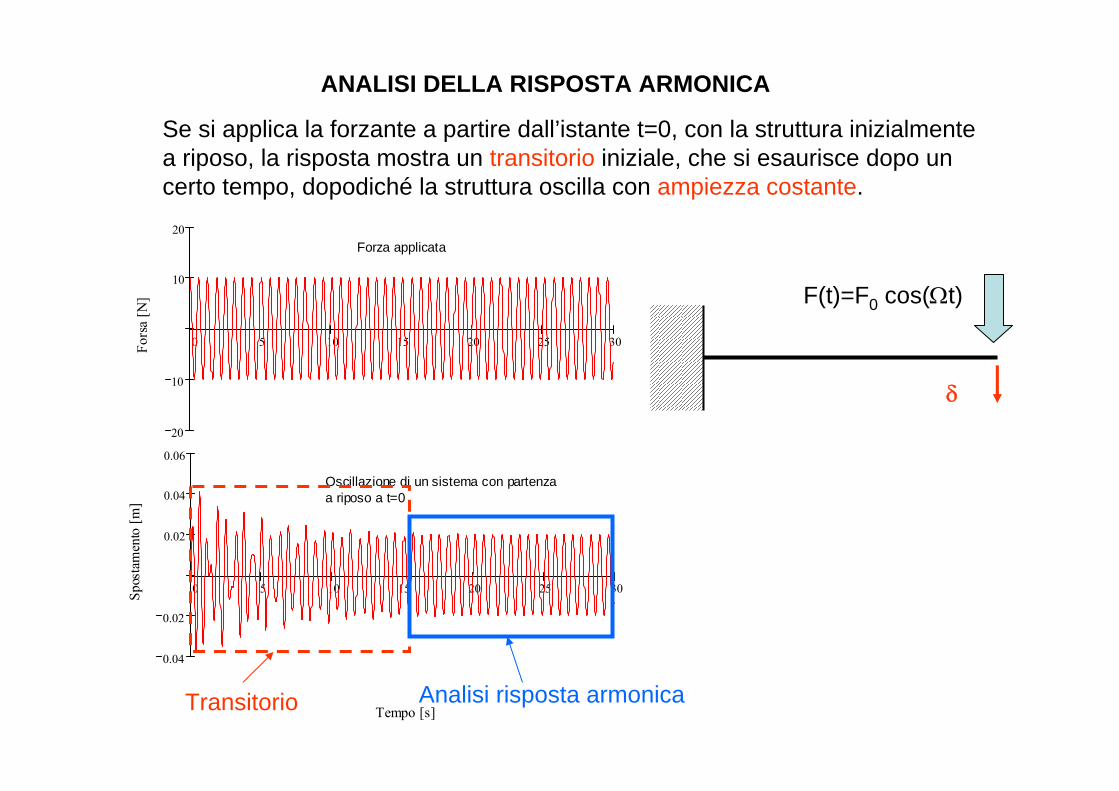
SCOPO: Valutare la risposta del sistema in presenza di una forzante esterna di tipo sinusoidale ed ampiezza costante nel tempo.
F0(t)=A0 cos(Ωt)
Su di una struttura, la “forzante” è in generale costituita da una o più forze esterne, aventi tutte la stessa pulsazione, ma ampiezza e fase distinte.
F1(t)=A1 cos(Ωt+Φ)
0 5 10 15 20 25 30
20
10
10
20
Fors
a [N
]
Forza applicata
0 5 10 15 20 25 30
0.04
0.02
0.02
0.04
0.06
Tempo [s]
Spos
tam
ento
[m]
Oscillazione di un sistema con partenzaa riposo a t=0
Se si applica la forzante a partire dall’istante t=0, con la struttura inizialmente a riposo, la risposta mostra un transitorio iniziale, che si esaurisce dopo un certo tempo, dopodiché la struttura oscilla con ampiezza costante.
Transitorio Analisi risposta armonica
F(t)=F0 cos(Ωt)
δ
ANALISI DELLA RISPOSTA ARMONICA
ANALISI DELLA RISPOSTA ARMONICA
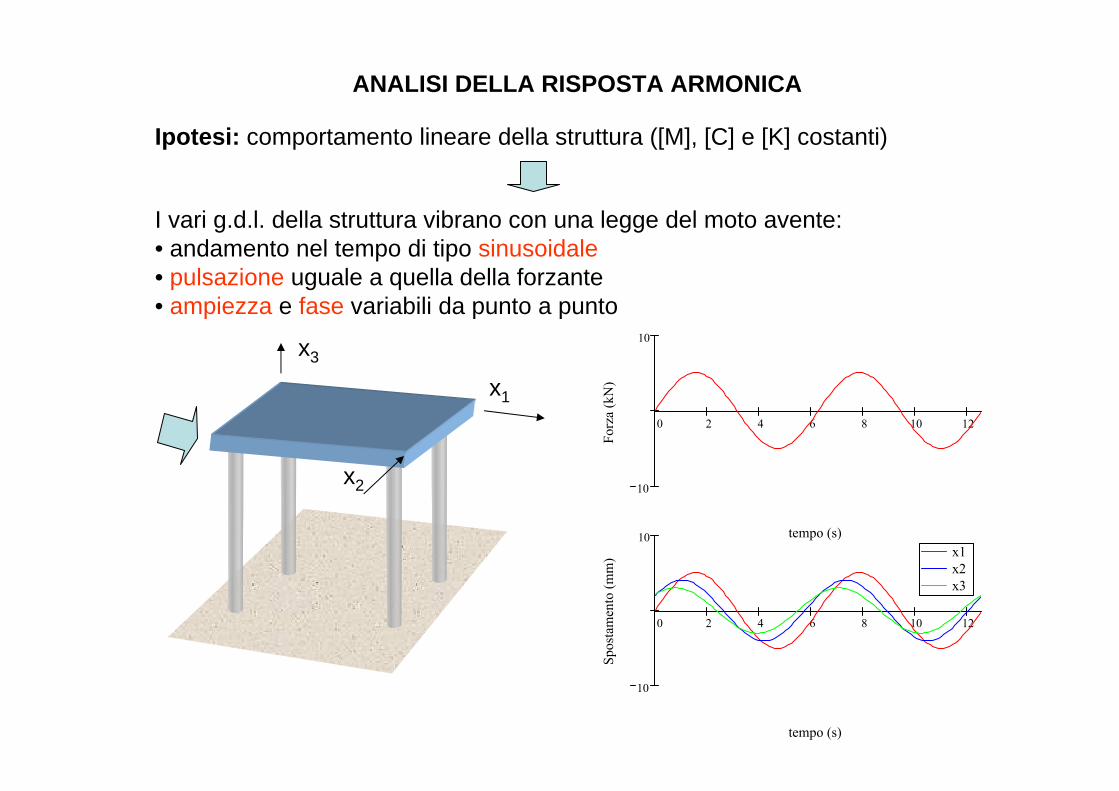
Ipotesi: comportamento lineare della struttura ([M], [C] e [K] costanti)
0 2 4 6 8 10 12
10
10
tempo (s)
Forz
a (k
N)
0 2 4 6 8 10 12
10
10x1x2x3
tempo (s)
Spos
tam
ento
(mm
)
x1
x3
x2
I vari g.d.l. della struttura vibrano con una legge del moto avente:• andamento nel tempo di tipo sinusoidale• pulsazione uguale a quella della forzante• ampiezza e fase variabili da punto a punto
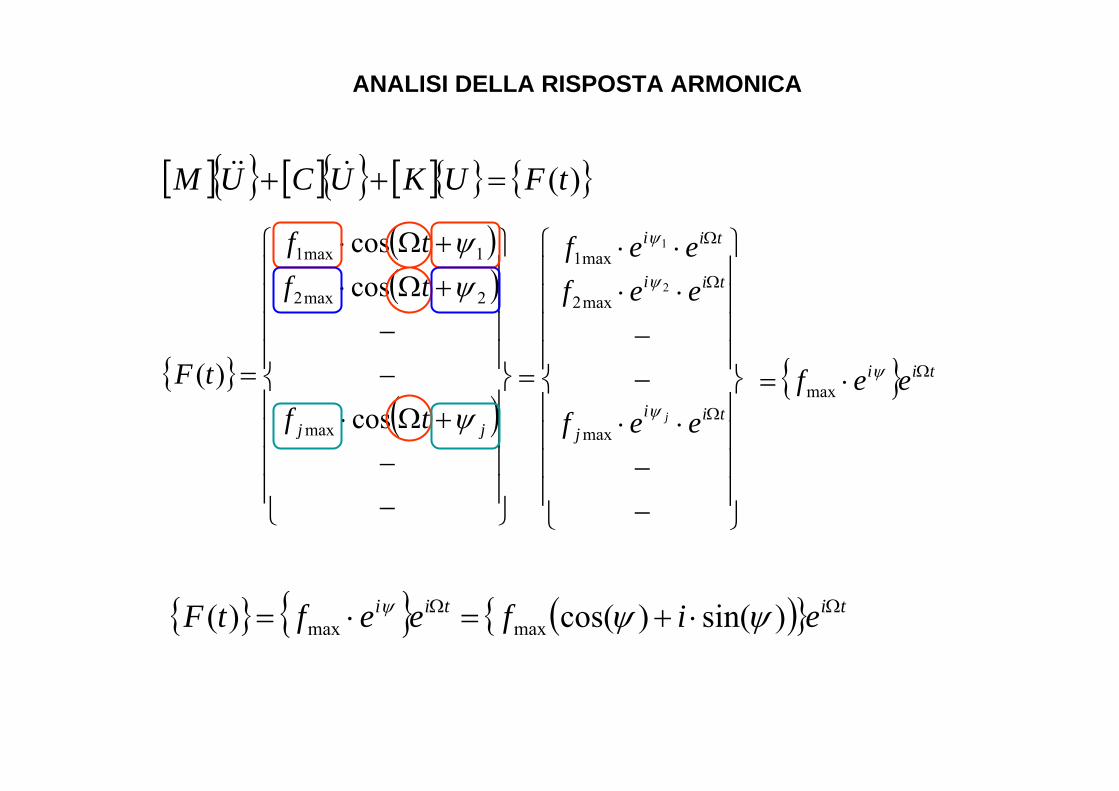
{ } { } ( ){ } titii eifeeftF ΩΩ ⋅+=⋅= )sin()cos()( maxmax ψψψ
[ ]{ } [ ]{ } [ ]{ } { })(tFUKUCUM =++ &&&
ANALISI DELLA RISPOSTA ARMONICA
{ }
( )( )
( )
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−
+Ω⋅−−
+Ω⋅+Ω⋅
=
jj tf
tftf
tFψ
ψψ
cos
coscos
)(
max
2max2
1max1
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−
⋅⋅−−
⋅⋅⋅⋅
=Ω
Ω
Ω
tiij
tii
tii
eef
eefeef
jψ
ψ
ψ
max
max2
max12
1
{ } tii eef Ω⋅= ψmax
{ } { } tii eeftF Ω⋅= ψmax)(
{ } { } tii eeuitU Ω⋅Ω= ϕmax)(&
{ } { } tii eeutU Ω⋅Ω−= ϕmax
2)(&&
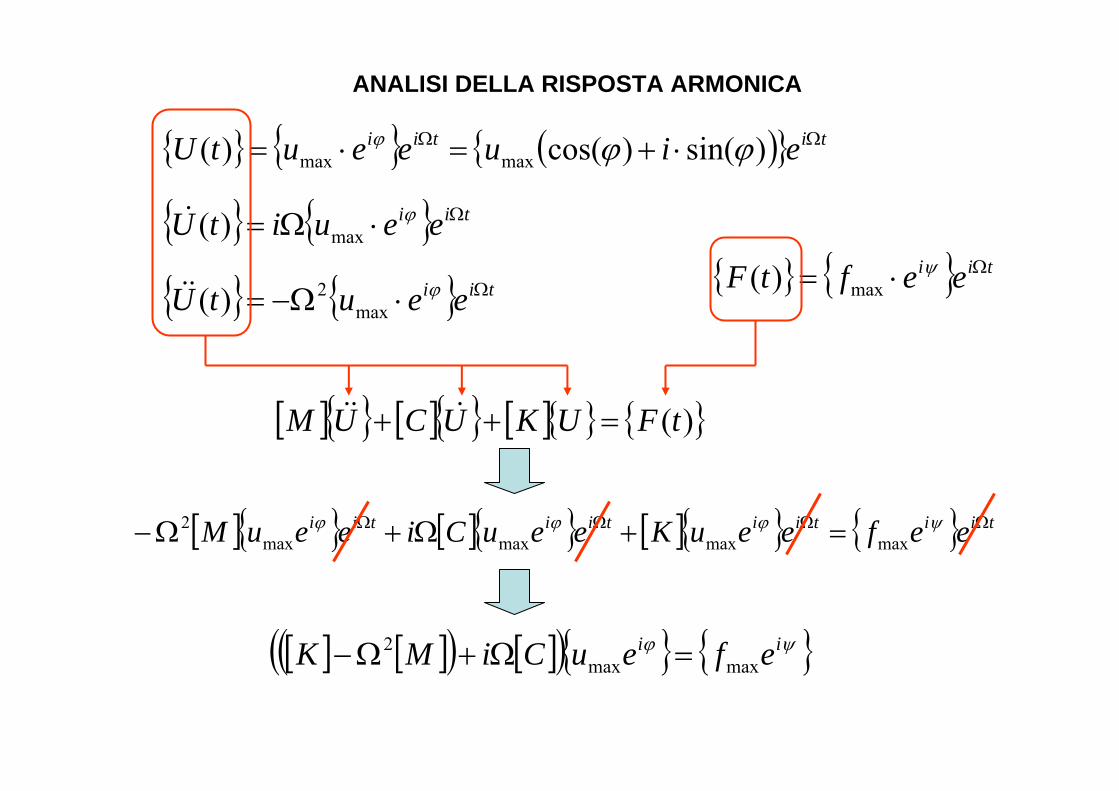
{ } { } ( ){ } titii eiueeutU ΩΩ ⋅+=⋅= )sin()cos()( maxmax ϕϕϕ
[ ]{ } [ ]{ } [ ]{ } { })(tFUKUCUM =++ &&&
ANALISI DELLA RISPOSTA ARMONICA
[ ]{ } [ ]{ } [ ]{ } { } tiitiitiitii eefeeuKeeuCieeuM ΩΩΩΩ =+Ω+Ω− ψϕϕϕmaxmaxmaxmax
2
[ ] [ ]( ) [ ]( ){ } { }ψϕ ii efeuCiMK maxmax2 =Ω+Ω−
[ ] [ ]( ) [ ]( ){ } { }ψϕ ii efeuCiMK maxmax2 =Ω+Ω−
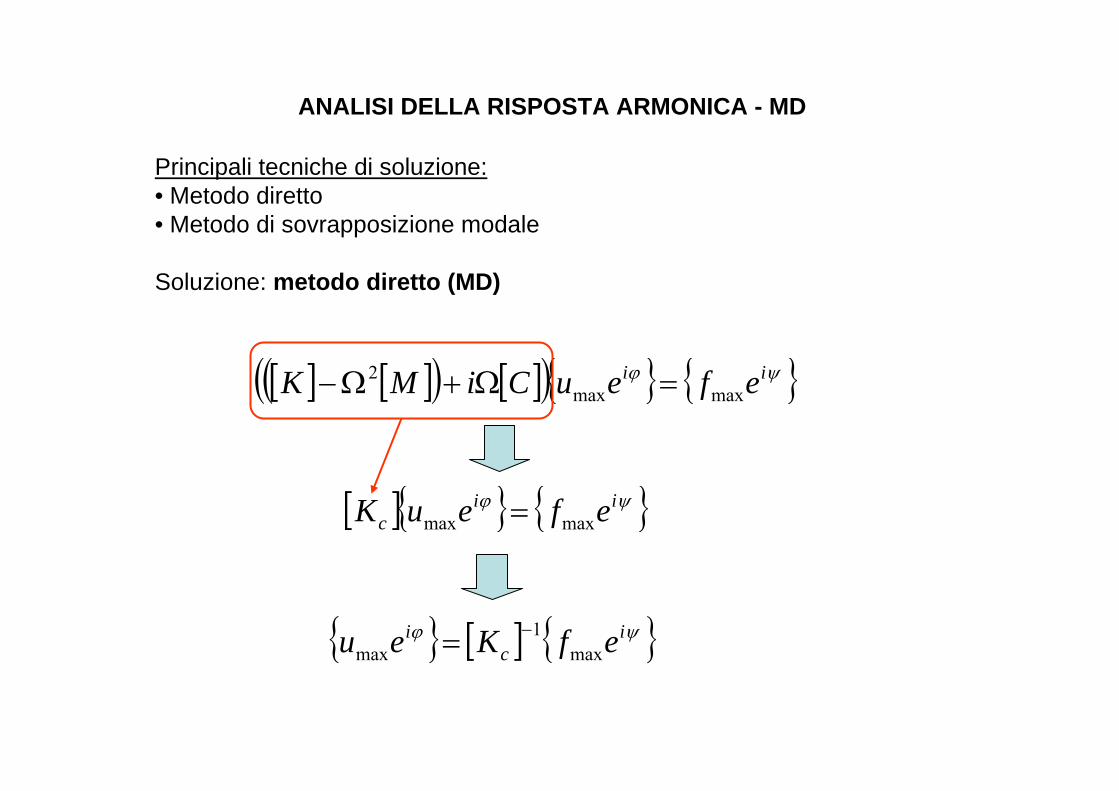
[ ]{ } { }ψϕ iic efeuK maxmax =
{ } [ ] { }ψϕ ic
i efKeu max1
max−=
ANALISI DELLA RISPOSTA ARMONICA - MD
Principali tecniche di soluzione:• Metodo diretto• Metodo di sovrapposizione modale
Soluzione: metodo diretto (MD)
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)( &&
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)( &&&&
ANALISI DELLA RISPOSTA ARMONICA - MSM
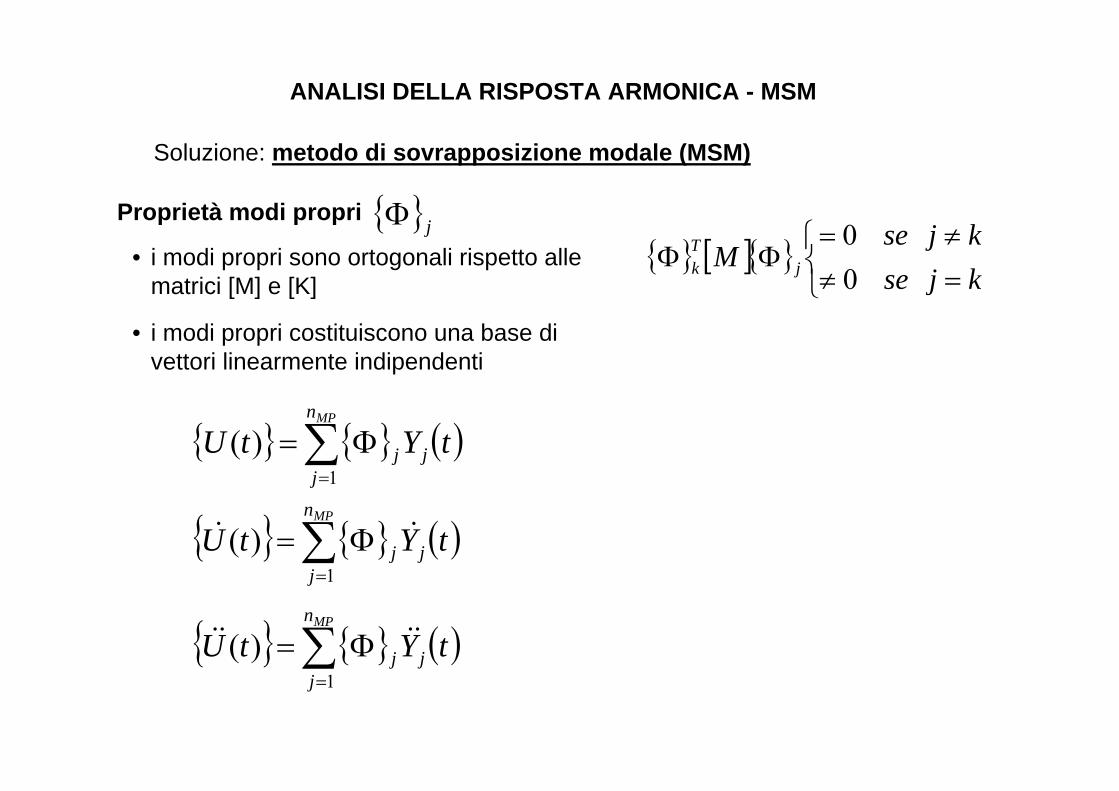
Soluzione: metodo di sovrapposizione modale (MSM)
Proprietà modi propri { }jΦ• i modi propri sono ortogonali rispetto alle
matrici [M] e [K]{ } [ ]{ }
⎩⎨⎧
=≠≠=
ΦΦkjsekjse
M jTk 0
0
• i modi propri costituiscono una base di vettori linearmente indipendenti
{ } { } ( )∑∞
=
Φ=1
)(j
jj tYtU{ } { } ( )∑∞
=
Φ=1
)(j
jj tYtU &&{ } { } ( )∑∞
=
Φ=1
)(j
jj tYtU &&&&
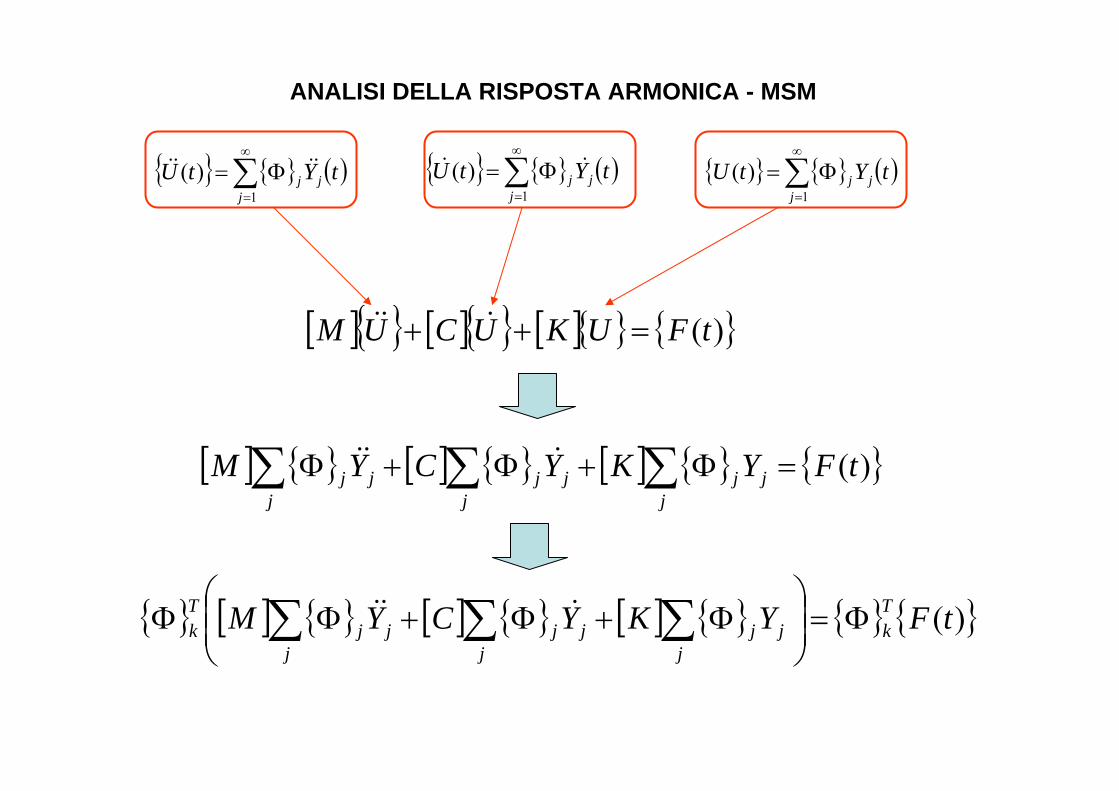
[ ] { } [ ] { } [ ] { } { })(tFYKYCYMj
jjj
jjj
jj =Φ+Φ+Φ ∑∑∑ &&&
{ } [ ] { } [ ] { } [ ] { } { } { })(tFYKYCYM Tk
jjj
jjj
jjj
Tk Φ=⎟⎟
⎠
⎞⎜⎜⎝
⎛Φ+Φ+ΦΦ ∑∑∑ &&&
ANALISI DELLA RISPOSTA ARMONICA - MSM
[ ]{ } [ ]{ } [ ]{ } { })(tFUKUCUM =++ &&&
{ } [ ] { } [ ] { } [ ] { } { } { })(tFYKYCYM Tk
jjj
jjj
jjj
Tk Φ=⎟⎟
⎠
⎞⎜⎜⎝
⎛Φ+Φ+ΦΦ ∑∑∑ &&&
ANALISI DELLA RISPOSTA ARMONICA - MSM
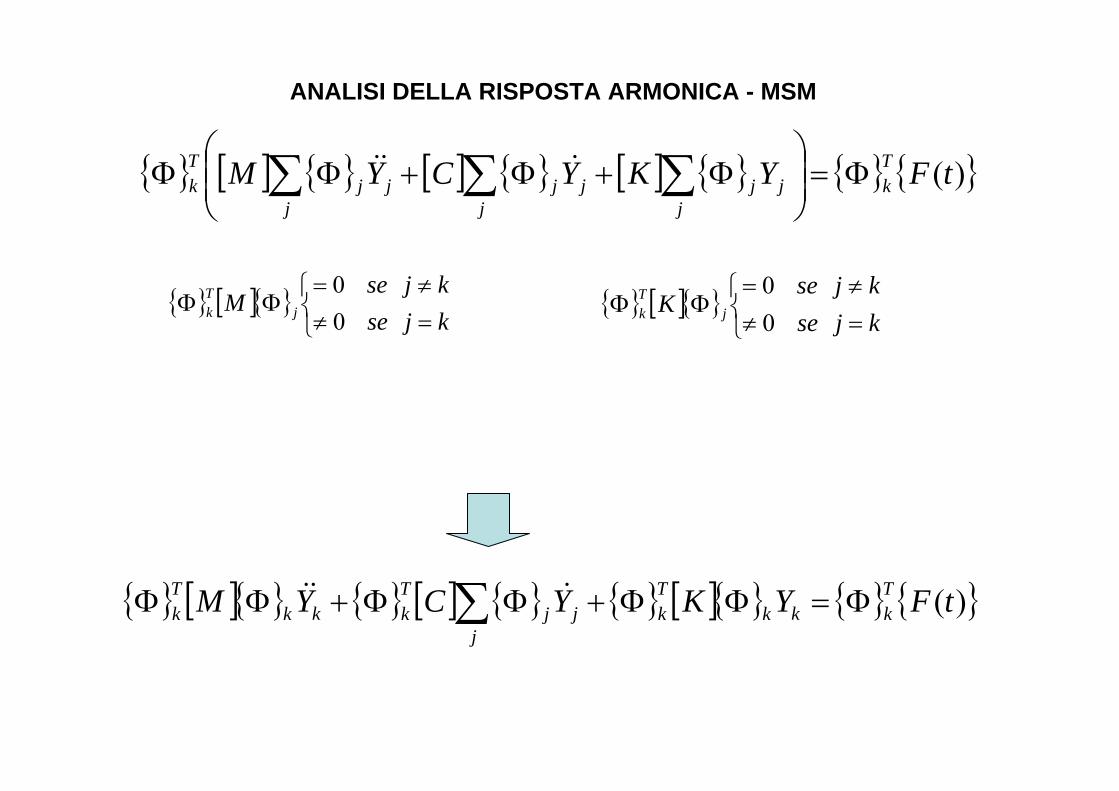
{ } [ ]{ }⎩⎨⎧
=≠≠=
ΦΦkjsekjse
M jTk 0
0 { } [ ]{ }⎩⎨⎧
=≠≠=
ΦΦkjsekjse
K jTk 0
0
{ } [ ]{ } { } [ ] { } { } [ ]{ } { } { })(tFYKYCYM Tkkk
Tk
jjj
Tkkk
Tk Φ=ΦΦ+ΦΦ+ΦΦ ∑ &&&
ANALISI DELLA RISPOSTA ARMONICA - MSM
Ipotesi aggiuntiva: smorzamento proporzionale (di Rayleigh) o costante
{ } [ ]{ }⎩⎨⎧
=≠≠=
ΦΦkjsekjse
C jTk 0
0
[ ] [ ] [ ] [ ]IKMC δβα ++=
{ } [ ]{ } { } [ ]{ } { } [ ]{ } { } { })(tFYKYCYM Tkkk
Tkkk
Tkkk
Tk Φ=ΦΦ+ΦΦ+ΦΦ &&&
{ } [ ]{ } { } [ ] { } { } [ ]{ } { } { })(tFYKYCYM Tkkk
Tk
jjj
Tkkk
Tk Φ=ΦΦ+ΦΦ+ΦΦ ∑ &&&
La matrice di smorzamento deve avere anch’essa una forma che garantisca la normalità rispetto ad essa delle forme modali.Non sono ammessi, ad esempio, smorzatori “localizzati”.
{ } [ ]{ } 1=ΦΦ kTk M
{ } [ ]{ } { } [ ]{ } { } [ ]{ } { } { })(tFYKYCYM Tkkk
Tkkk
Tkkk
Tk Φ=ΦΦ+ΦΦ+ΦΦ &&&
ANALISI DELLA RISPOSTA ARMONICA - MSM
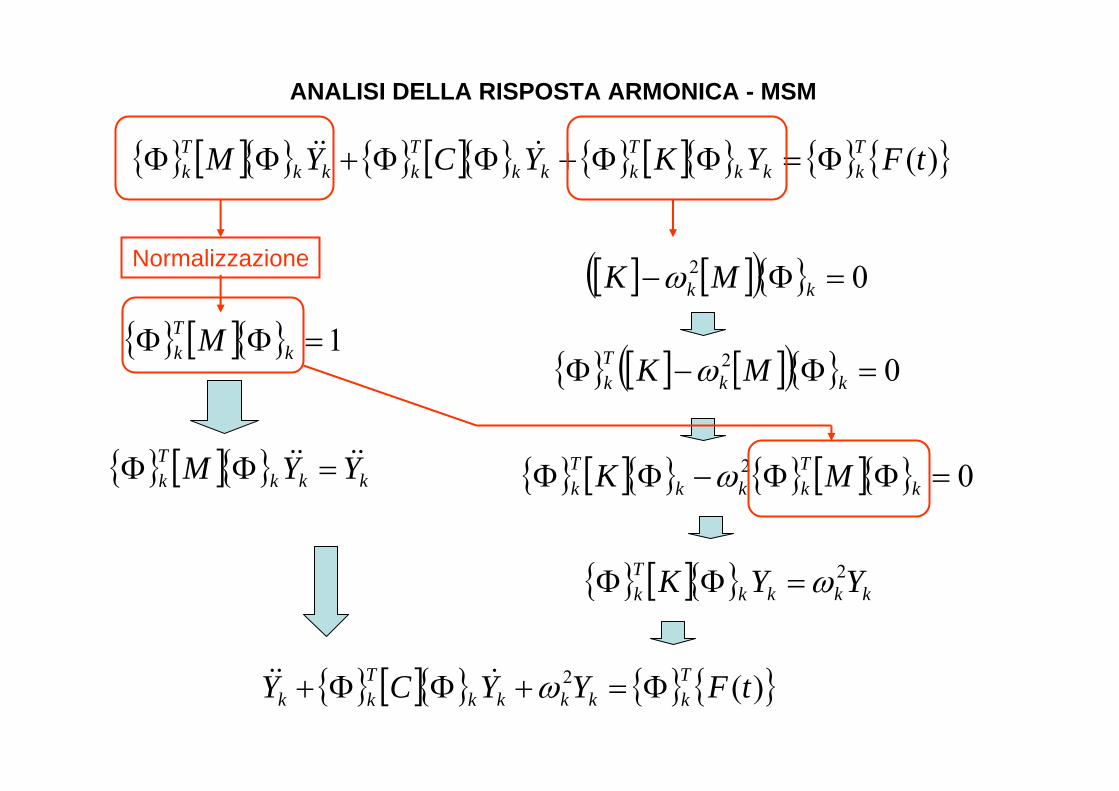
Normalizzazione
{ } [ ]{ } kkkTk YYM &&&& =ΦΦ
[ ] [ ]( ){ } 02 =Φ− kk MK ω
{ } [ ] [ ]( ){ } 02 =Φ−Φ kkTk MK ω
{ } [ ]{ } { } [ ]{ } 02 =ΦΦ−ΦΦ kTkkk
Tk MK ω
{ } [ ]{ } kkkkTk YYK 2ω=ΦΦ
{ } [ ]{ } { } { })(2 tFYYCY Tkkkkk
Tkk Φ=+ΦΦ+ ω&&&
{ } [ ]{ } { } [ ] [ ] [ ]( ){ } =Φ++Φ=ΦΦ kTkk
Tk IKMC δβα
{ } [ ]{ } { } { })(2 tFYYCY Tkkkkk
Tkk Φ=+ΦΦ+ ω&&&
ANALISI DELLA RISPOSTA ARMONICA - MSM
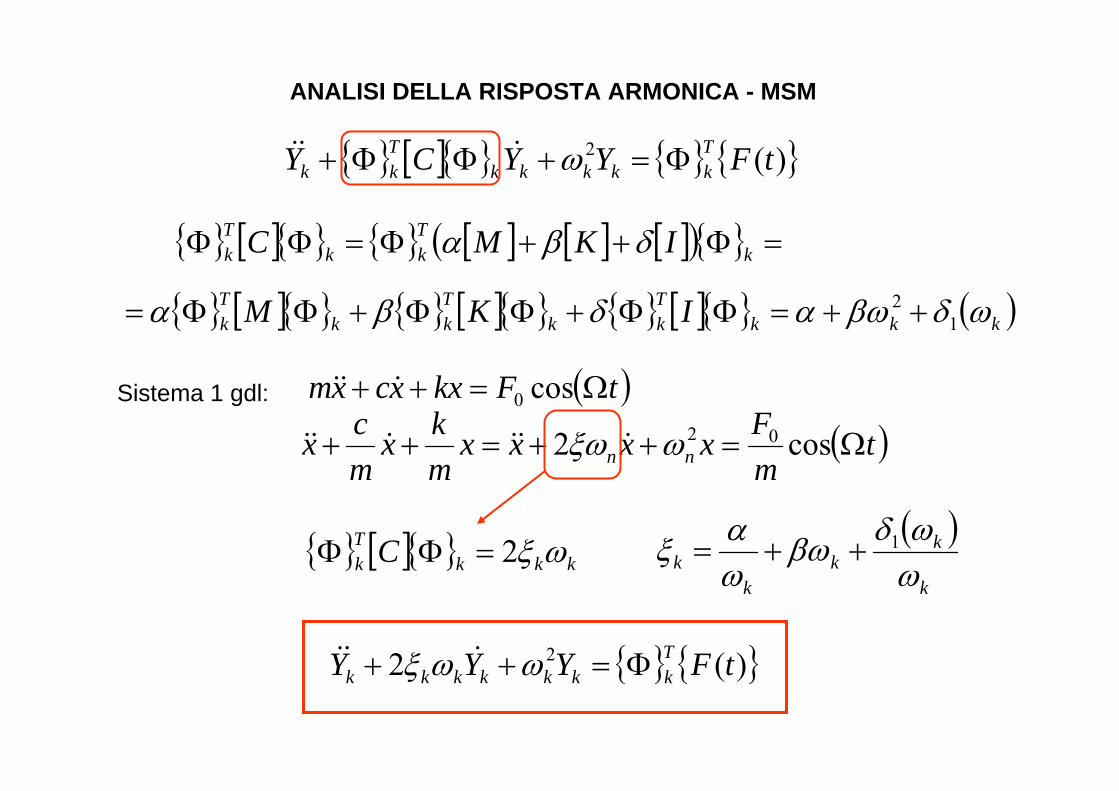
{ } [ ]{ } { } [ ]{ } { } [ ]{ } ( )kkkTkk
Tkk
Tk IKM ωδβωαδβα 1
2 ++=ΦΦ+ΦΦ+ΦΦ=
Sistema 1 gdl:
( )tmFxxxx
mkx
mcx nn Ω=++=++ cos2 02ωξω &&&&&&
{ } [ ]{ } kkkTk C ωξ2=ΦΦ
( )k
kk
kk ω
ωδβωωαξ 1++=
( )tFkxxcxm Ω=++ cos0&&&
{ } { })(2 2 tFYYY Tkkkkkkk Φ=++ ωωξ &&&
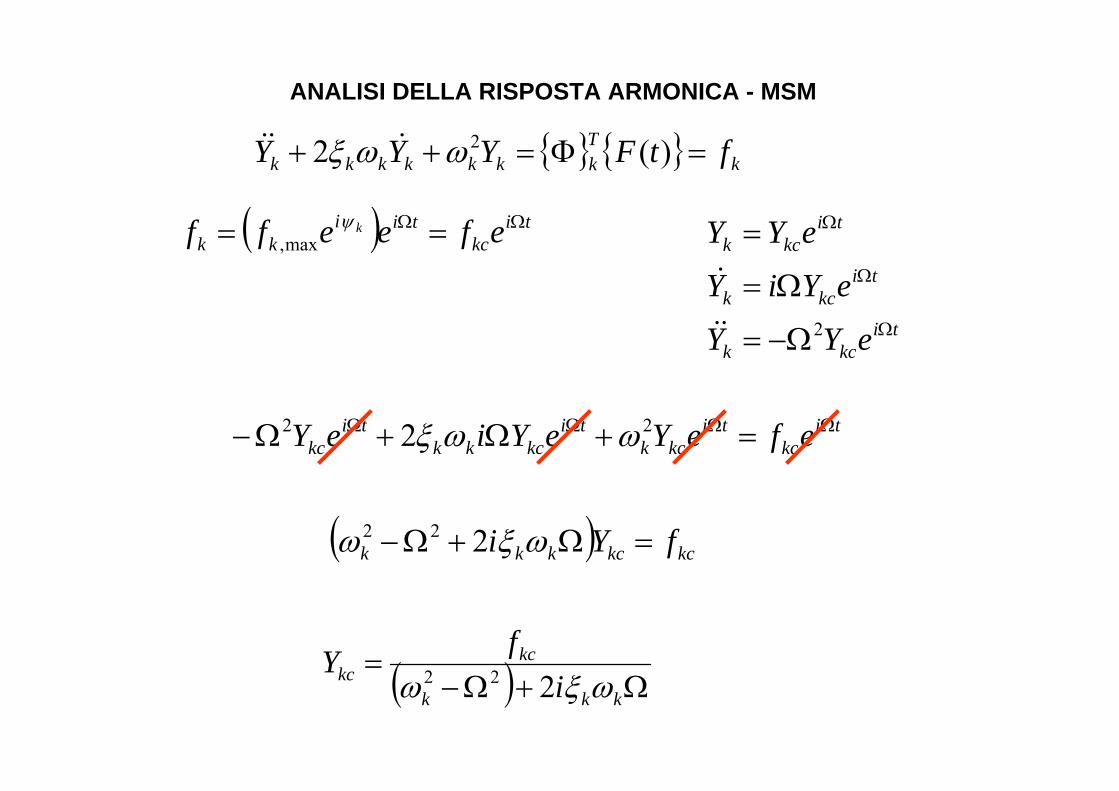
{ } { } kTkkkkkkk ftFYYY =Φ=++ )(2 2ωωξ &&&
( ) tikc
tiikk efeeff k ΩΩ == ψ
max,
tikck
tikck
tikck
eYY
eYiY
eYY
Ω
Ω
Ω
Ω−=
Ω=
=
2&&
&
( ) kckckkk fYi =Ω+Ω− ωξω 222
ANALISI DELLA RISPOSTA ARMONICA - MSM
tikc
tikck
tikckk
tikc efeYeYieY ΩΩΩΩ =+Ω+Ω− 22 2 ωωξ
( ) Ω+Ω−=
kkk
kckc i
fYωξω 222
( )
22
2
2
2
22
21
2
⎟⎟⎠
⎞⎜⎜⎝
⎛ Ω+⎟⎟
⎠
⎞⎜⎜⎝
⎛ Ω−
=
=Ω+Ω−
=
kk
k
k
kc
kkk
kckc
fi
fY
ωξ
ω
ω
ωξω
ANALISI DELLA RISPOSTA ARMONICA - MSM
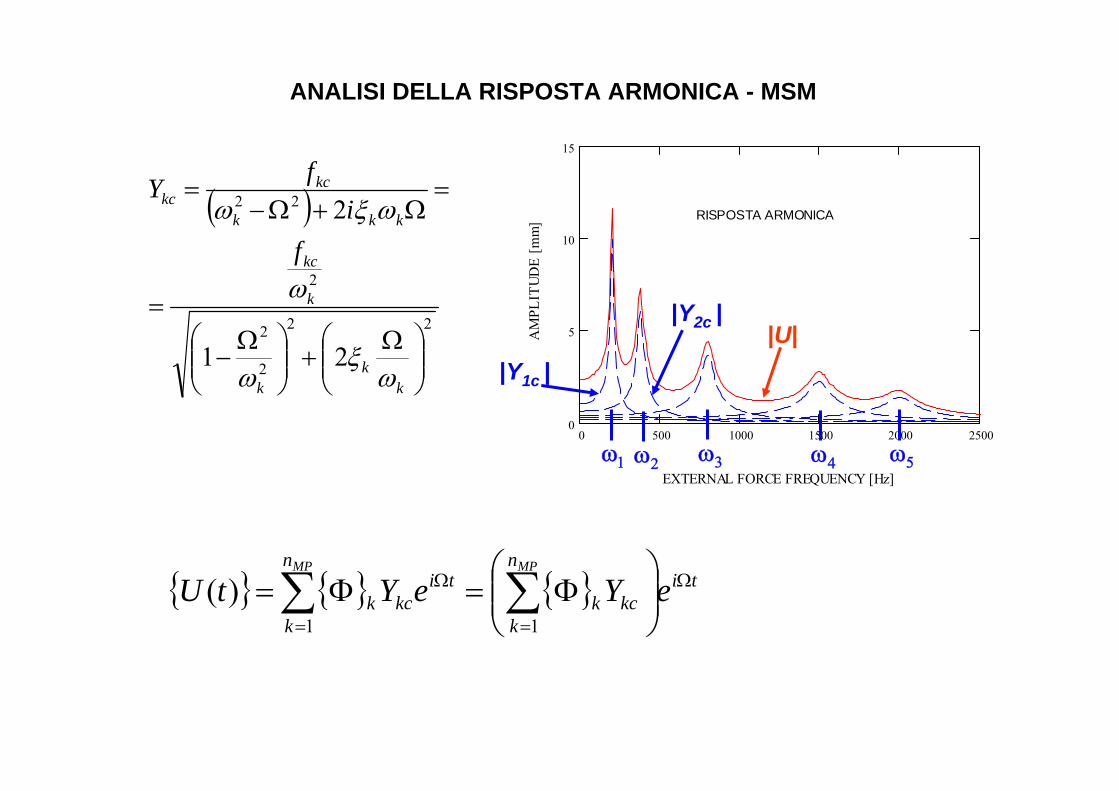
{ } { } { } tin
kkck
n
k
tikck eYeYtU
MPMPΩ
==
Ω⎟⎟⎠
⎞⎜⎜⎝
⎛Φ=Φ= ∑∑
11
)(
0 500 1000 1500 2000 25000
5
10
15
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
] RISPOSTA ARMONICA
ω1 ω2 ω3 ω4 ω5
|Y1c |
|Y2c ||U|
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
T T
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
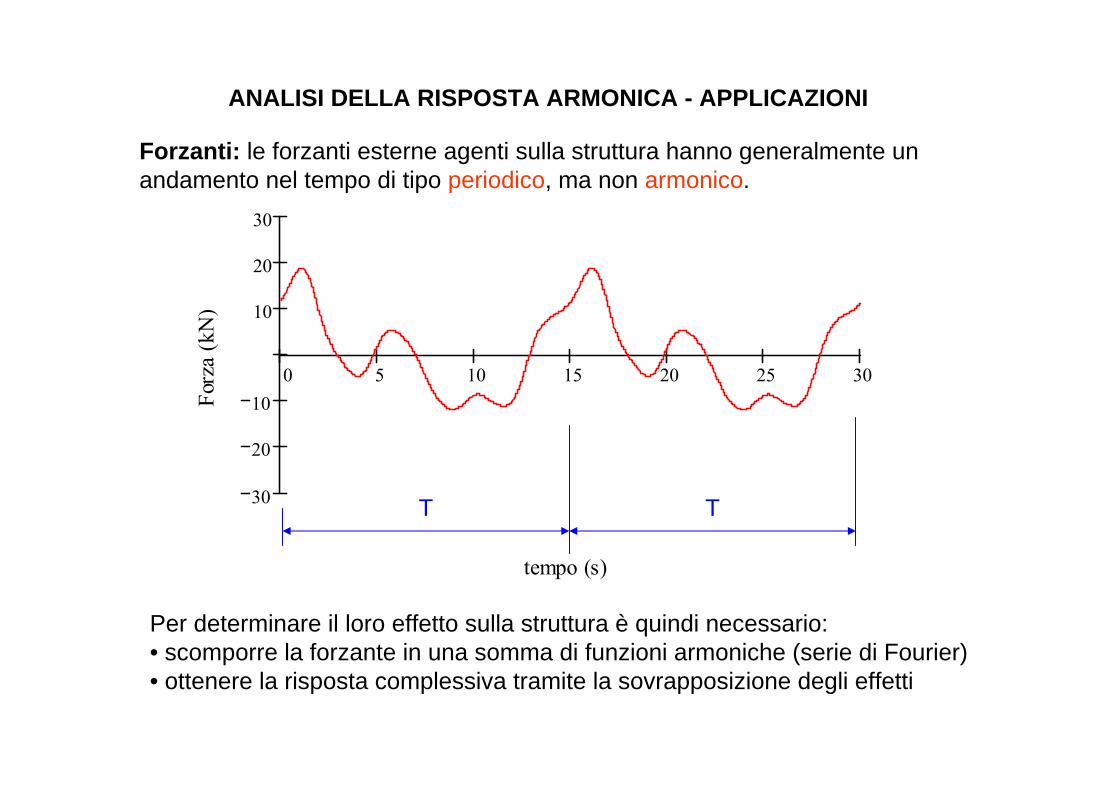
Forzanti: le forzanti esterne agenti sulla struttura hanno generalmente un andamento nel tempo di tipo periodico, ma non armonico.
Per determinare il loro effetto sulla struttura è quindi necessario:• scomporre la forzante in una somma di funzioni armoniche (serie di Fourier)• ottenere la risposta complessiva tramite la sovrapposizione degli effetti
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
T T
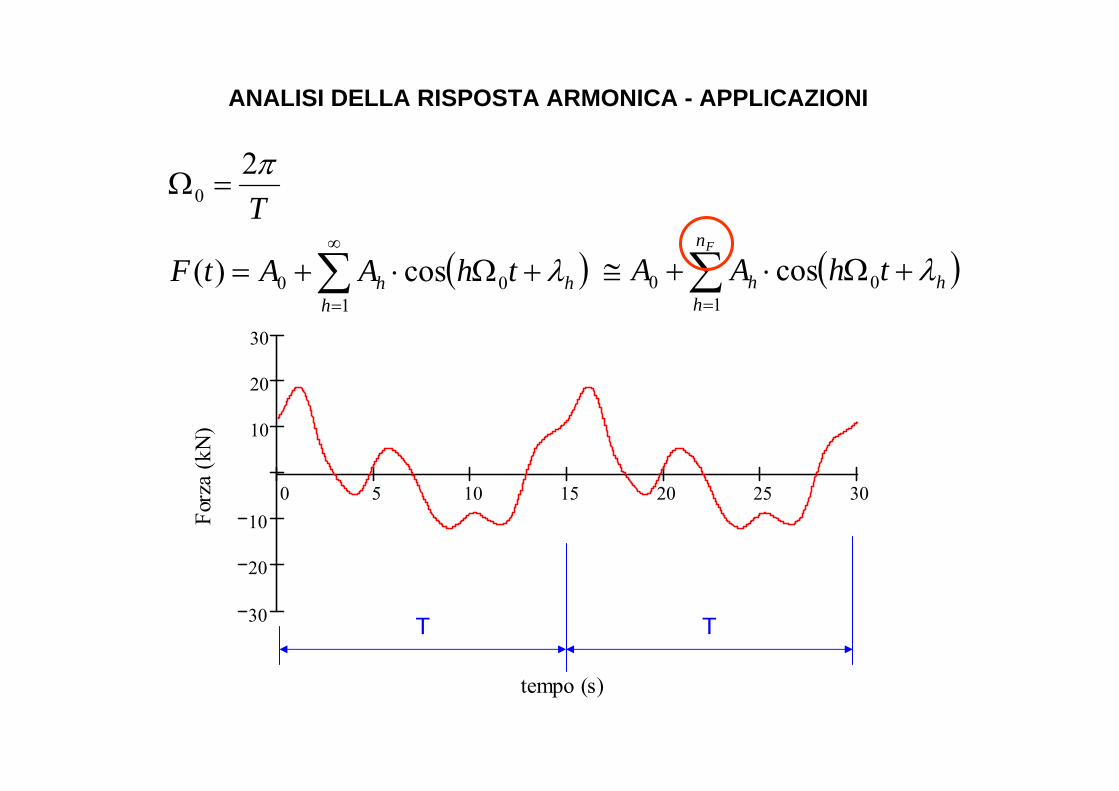
( )∑∞
=
+Ω⋅+=
=Ω
100
0
cos)(
2
hhh thAAtF
T
λ
π
( )∑=
+Ω⋅+≅Fn
hhh thAA
100 cos λ
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
0
1
2
3
4
5
6
7
8
1 2 3 4 5 6 7 8 9 10
Ordine armonica
Am
piez
za [k
N]
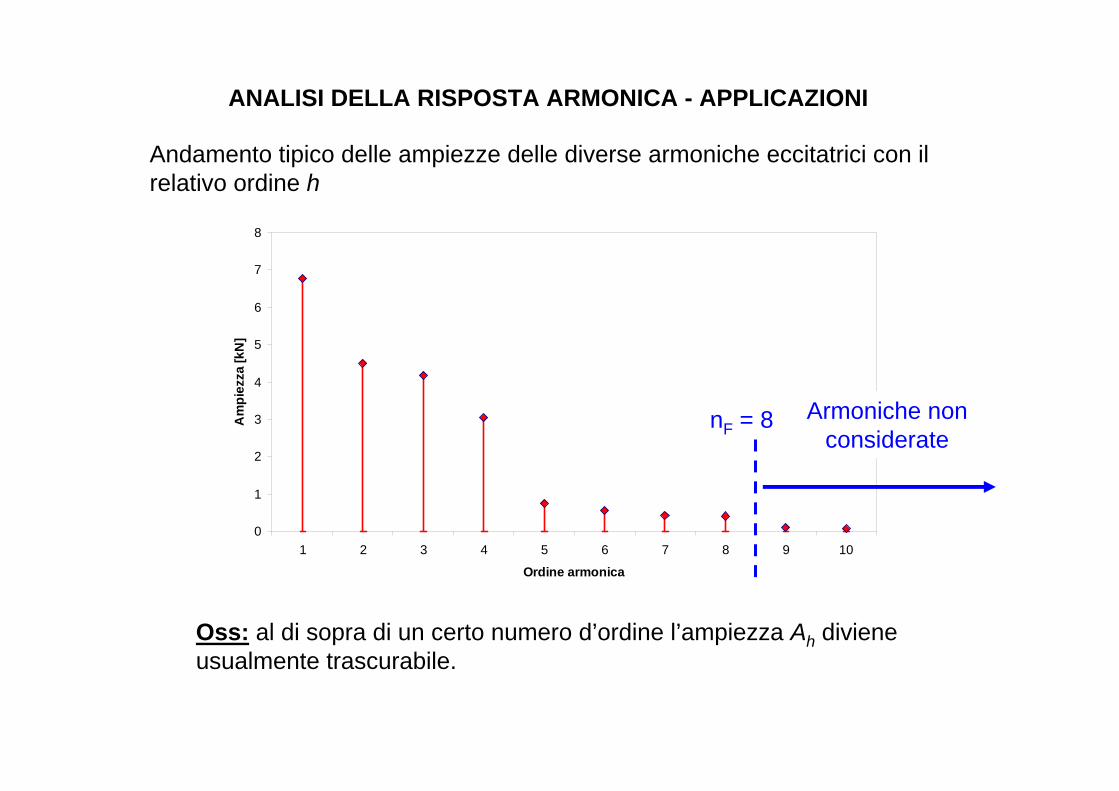
Andamento tipico delle ampiezze delle diverse armoniche eccitatrici con il relativo ordine h
Oss: al di sopra di un certo numero d’ordine l’ampiezza Ah diviene usualmente trascurabile.
nF = 8 Armoniche non considerate
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
nB 1=
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
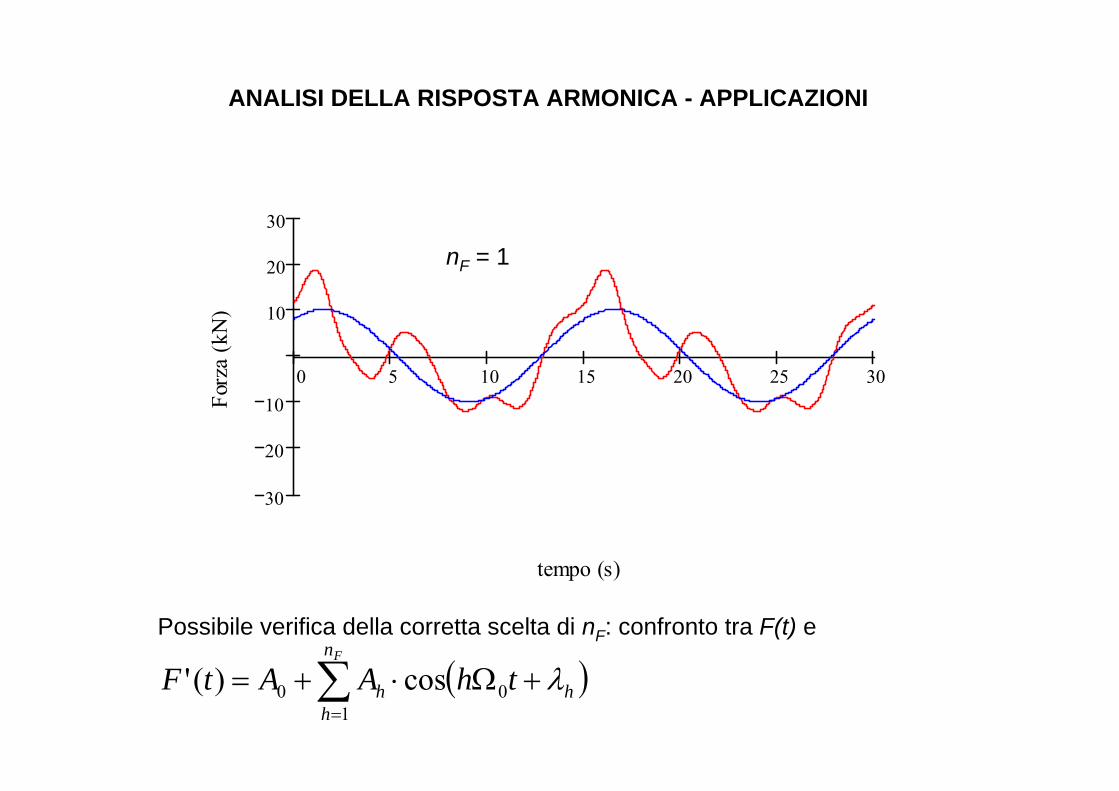
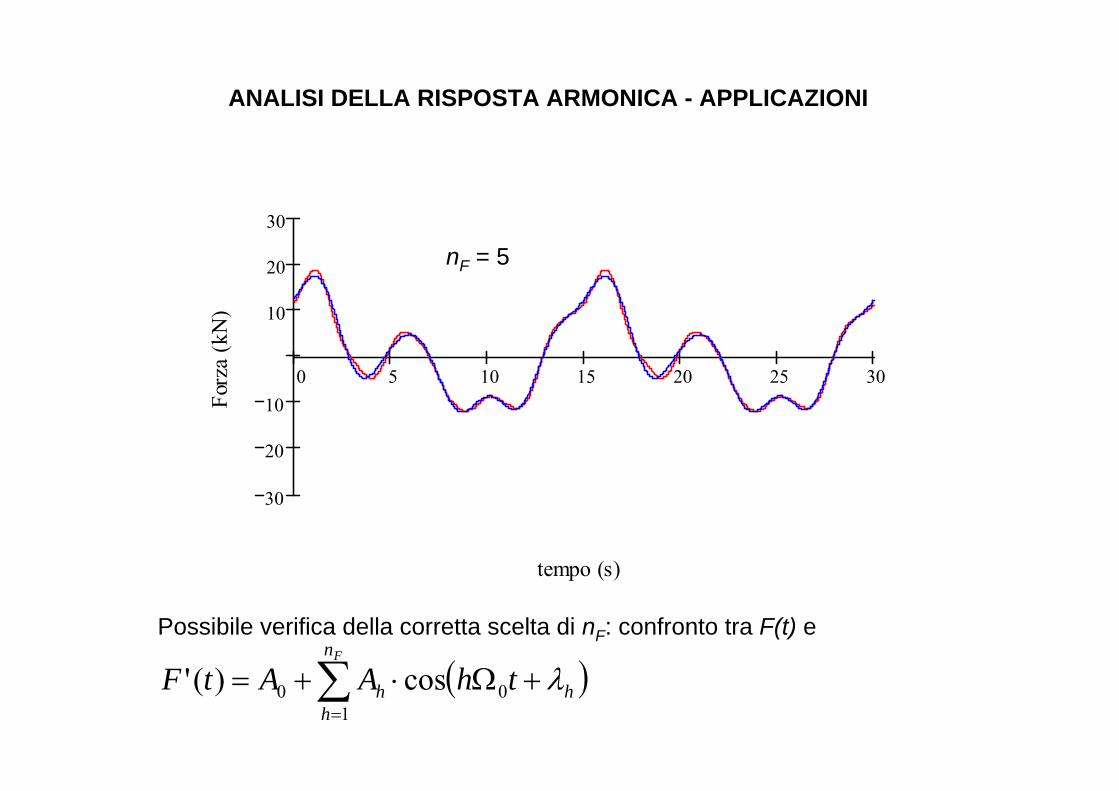
Possibile verifica della corretta scelta di nF: confronto tra F(t) e
( )∑=
+Ω⋅+=Fn
hhh thAAtF
100 cos)(' λ
nF = 1
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
nB 2=
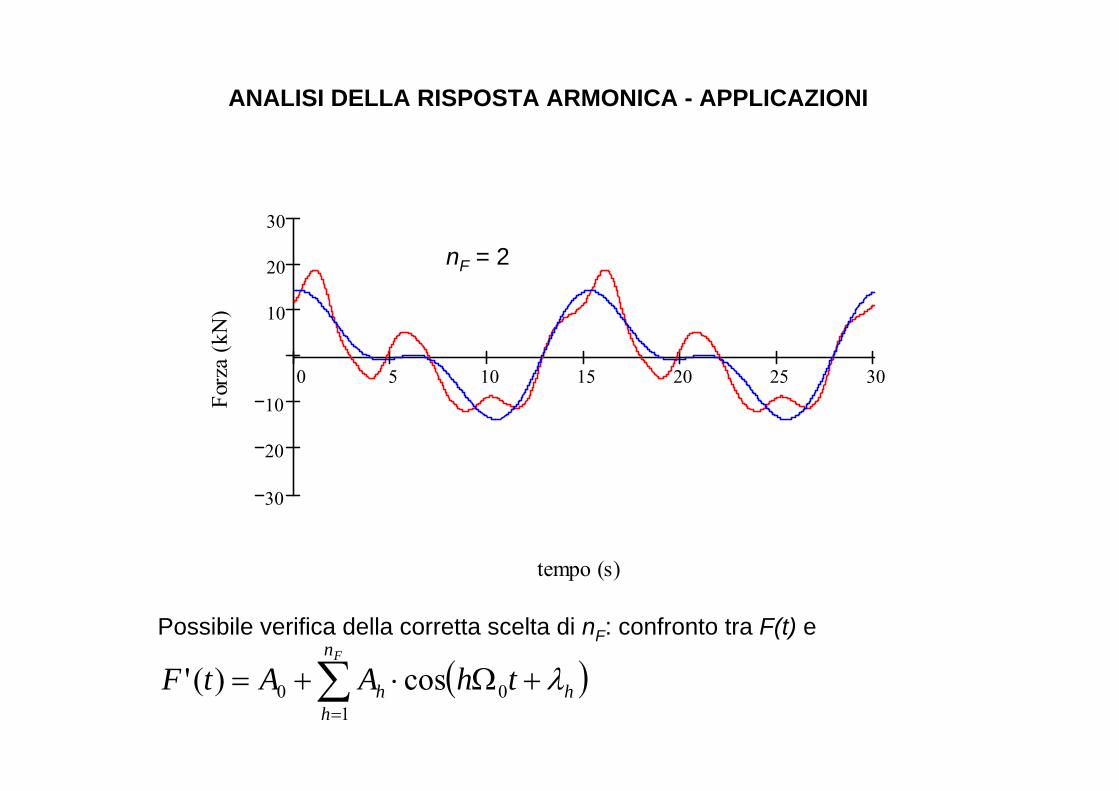
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
Possibile verifica della corretta scelta di nF: confronto tra F(t) e
( )∑=
+Ω⋅+=Fn
hhh thAAtF
100 cos)(' λ
nF = 2
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
nB 3=
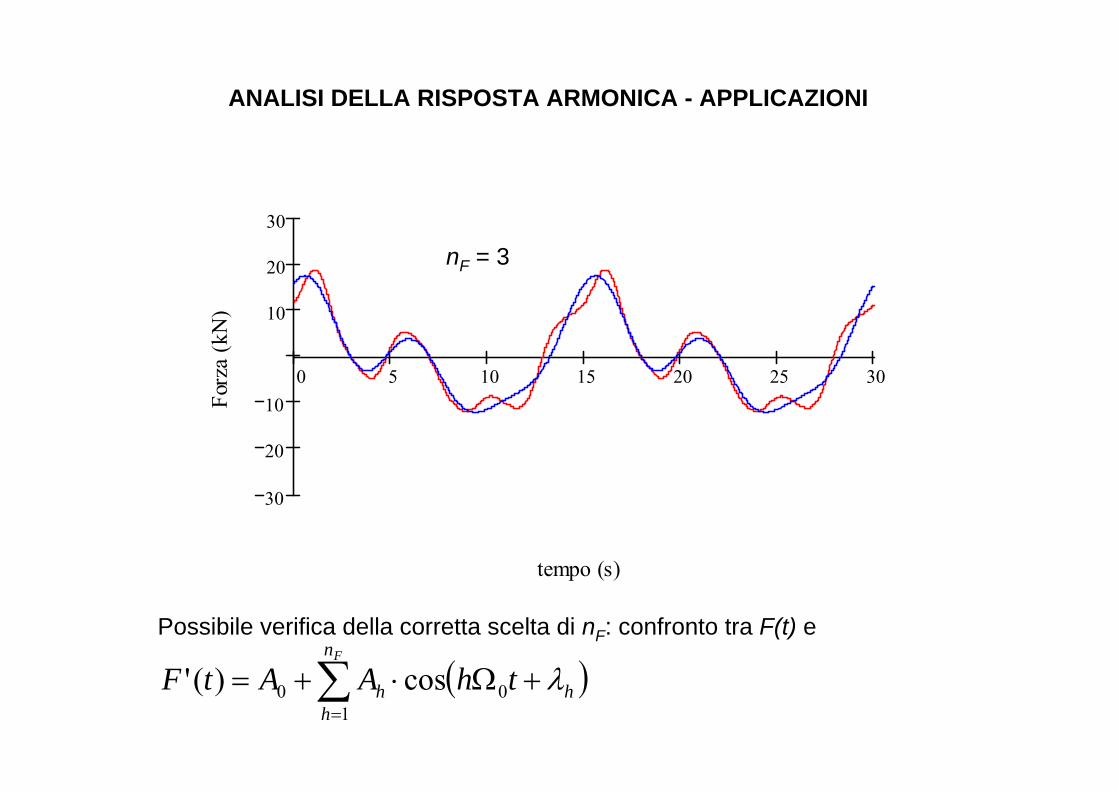
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
Possibile verifica della corretta scelta di nF: confronto tra F(t) e
( )∑=
+Ω⋅+=Fn
hhh thAAtF
100 cos)(' λ
nF = 3
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
nB 4=
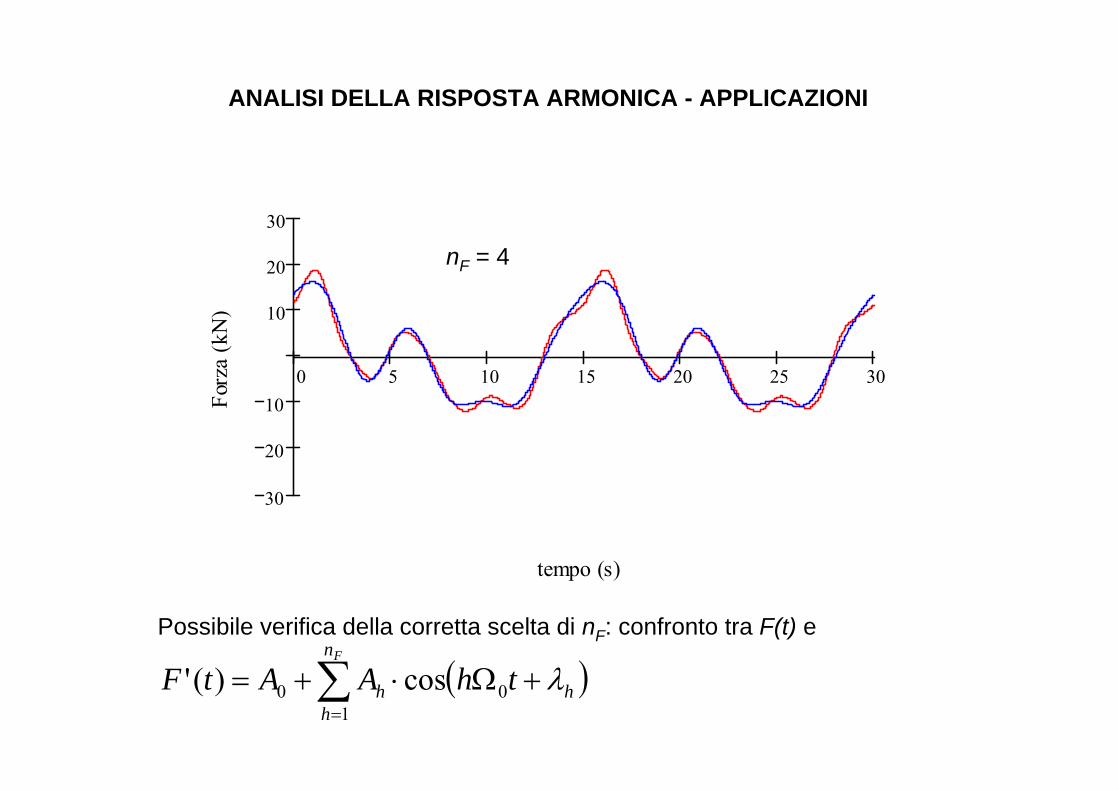
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
Possibile verifica della corretta scelta di nF: confronto tra F(t) e
( )∑=
+Ω⋅+=Fn
hhh thAAtF
100 cos)(' λ
nF = 4
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
nB 5=
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
Possibile verifica della corretta scelta di nF: confronto tra F(t) e
( )∑=
+Ω⋅+=Fn
hhh thAAtF
100 cos)(' λ
nF = 5
0 5 10 15 20 25 30
30
20
10
10
20
30
tempo (s)
Forz
a (k
N)
nB 7=
ANALISI DELLA RISPOSTA ARMONICA - APPLICAZIONI
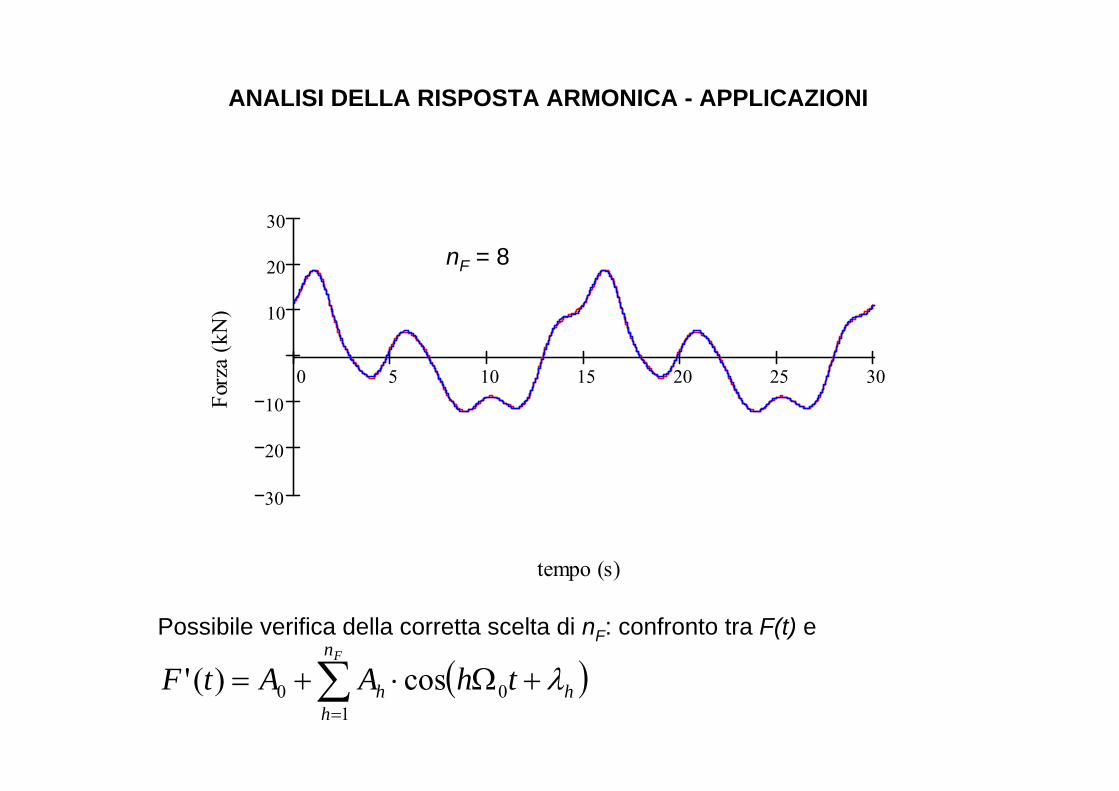
Possibile verifica della corretta scelta di nF: confronto tra F(t) e
( )∑=
+Ω⋅+=Fn
hhh thAAtF
100 cos)(' λ
nF = 8
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
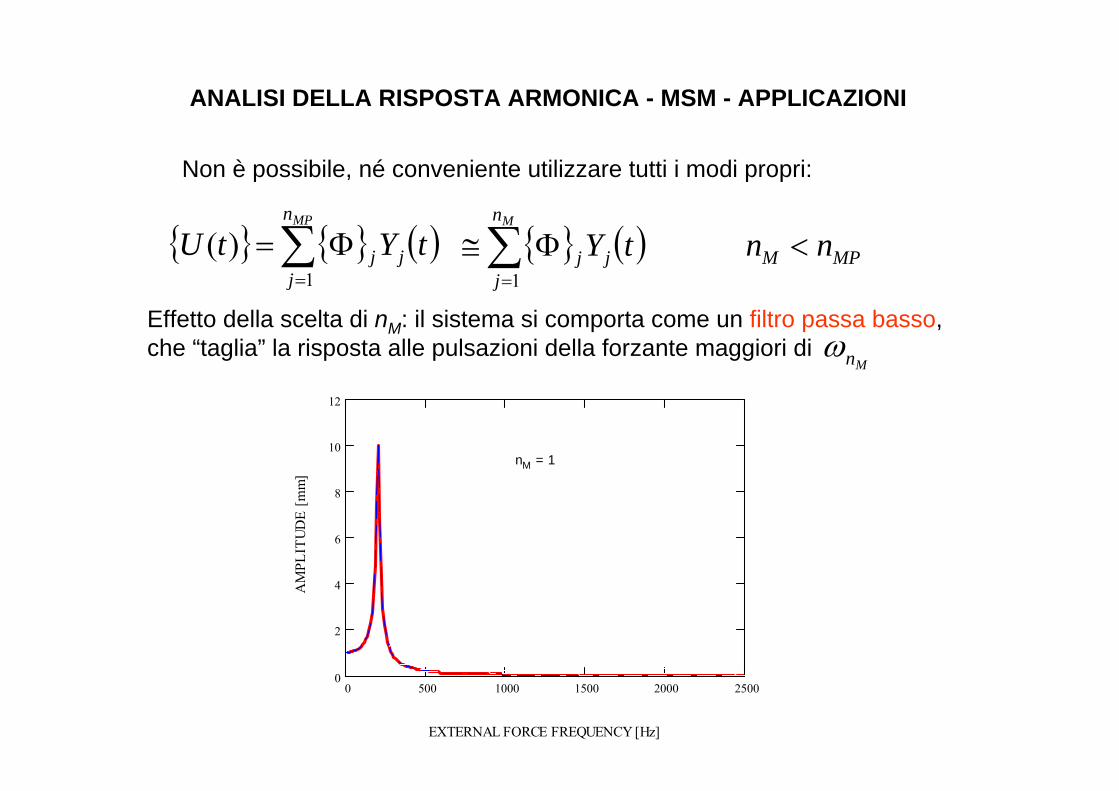
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
{ } ( ) MPM
n
jjj nntY
M
<Φ≅ ∑=1
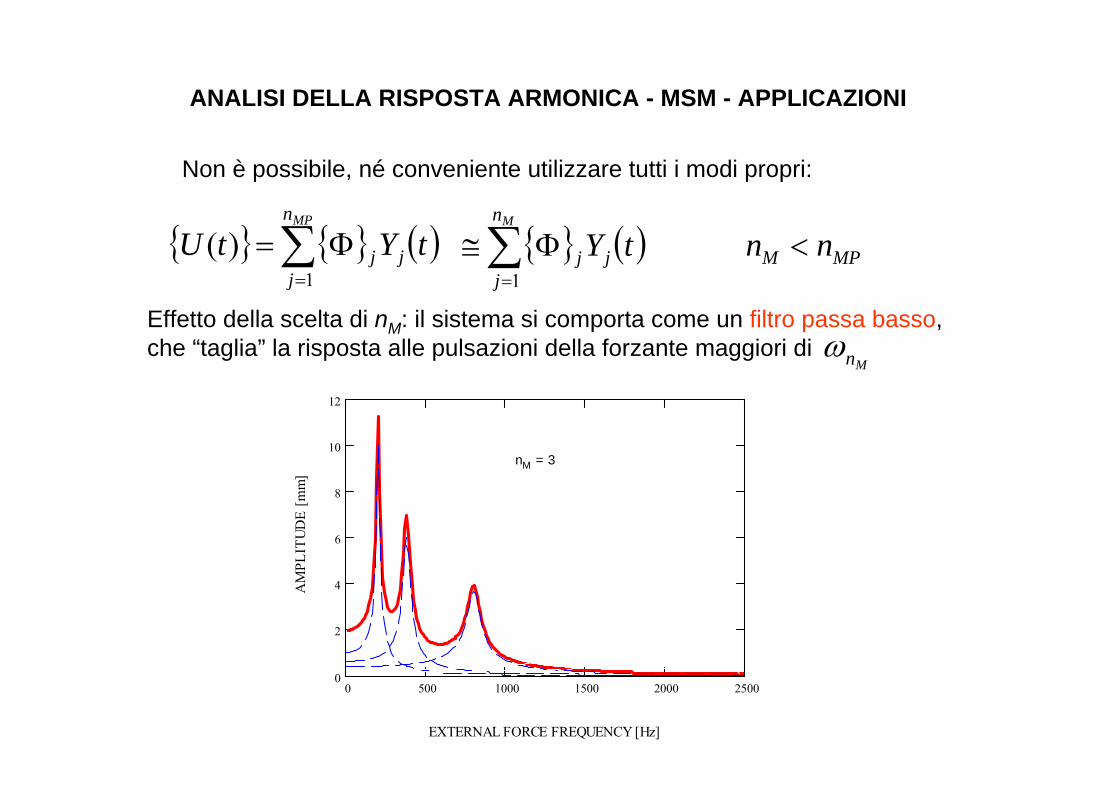
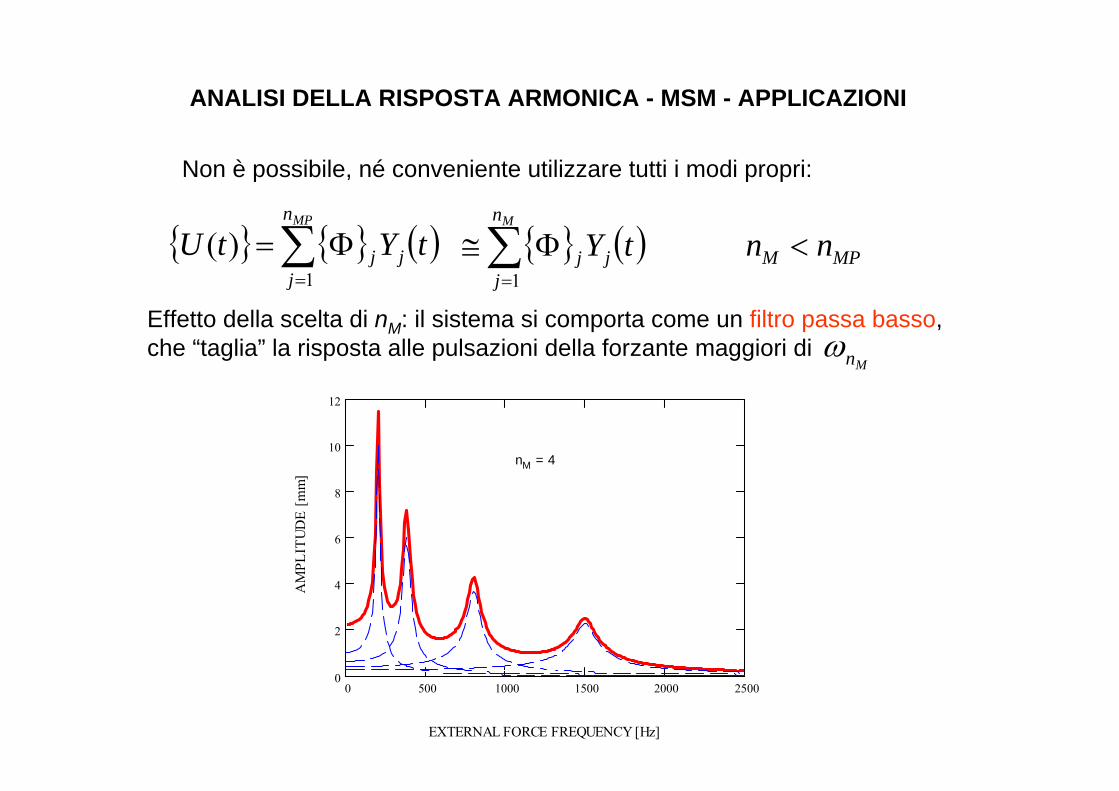
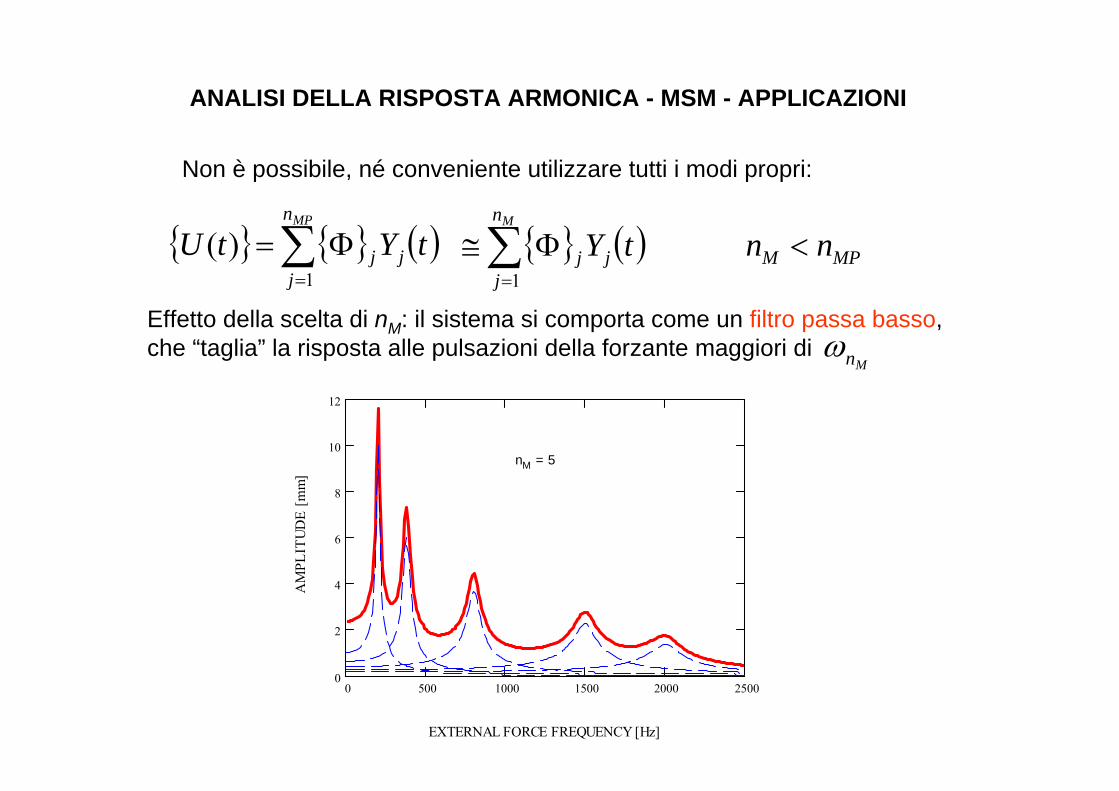
Non è possibile, né conveniente utilizzare tutti i modi propri:
Effetto della scelta di nM: il sistema si comporta come un filtro passa basso, che “taglia” la risposta alle pulsazioni della forzante maggiori di
Mnω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 1
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
{ } ( ) MPM
n
jjj nntY
M
<Φ≅ ∑=1
Non è possibile, né conveniente utilizzare tutti i modi propri:
Effetto della scelta di nM: il sistema si comporta come un filtro passa basso, che “taglia” la risposta alle pulsazioni della forzante maggiori di
Mnω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
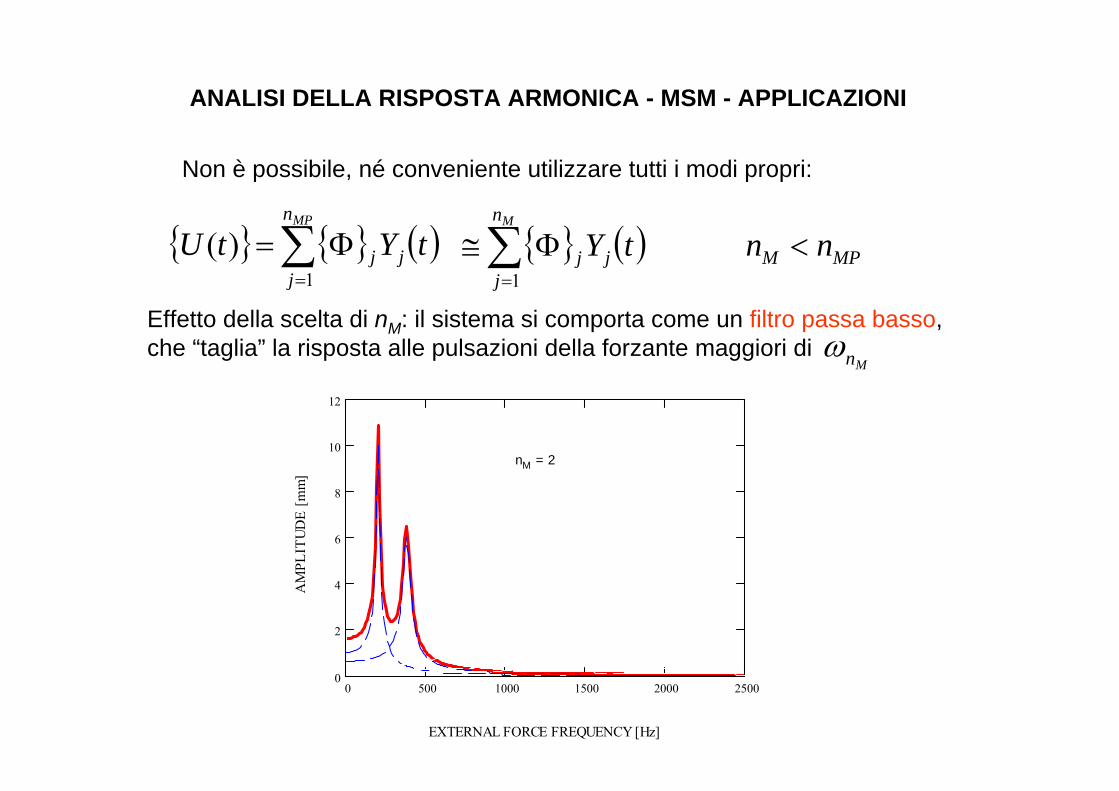
nM = 2
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
{ } ( ) MPM
n
jjj nntY
M
<Φ≅ ∑=1
Non è possibile, né conveniente utilizzare tutti i modi propri:
Effetto della scelta di nM: il sistema si comporta come un filtro passa basso, che “taglia” la risposta alle pulsazioni della forzante maggiori di
Mnω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 3
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
{ } ( ) MPM
n
jjj nntY
M
<Φ≅ ∑=1
Non è possibile, né conveniente utilizzare tutti i modi propri:
Effetto della scelta di nM: il sistema si comporta come un filtro passa basso, che “taglia” la risposta alle pulsazioni della forzante maggiori di
Mnω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 4
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
{ } ( ) MPM
n
jjj nntY
M
<Φ≅ ∑=1
Non è possibile, né conveniente utilizzare tutti i modi propri:
Effetto della scelta di nM: il sistema si comporta come un filtro passa basso, che “taglia” la risposta alle pulsazioni della forzante maggiori di
Mnω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 5
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 2
Banda passante
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
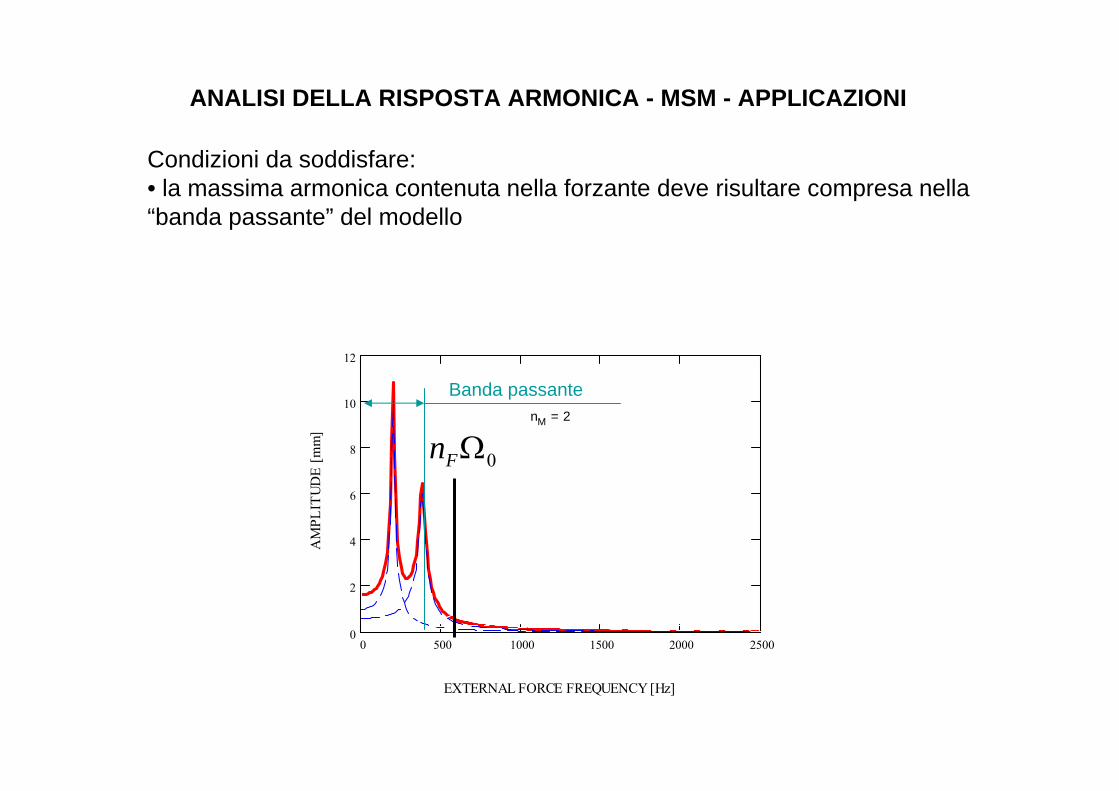
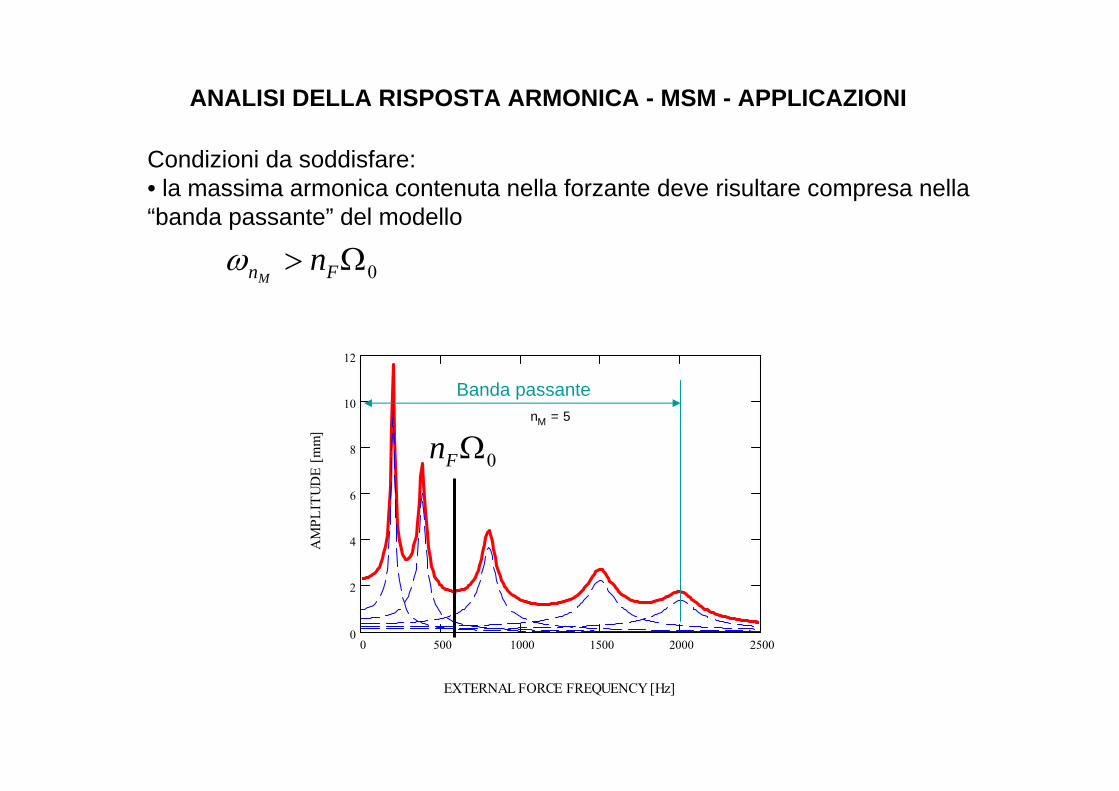
Condizioni da soddisfare: • la massima armonica contenuta nella forzante deve risultare compresa nella “banda passante” del modello
0ΩFn
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 5
Banda passante
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
Condizioni da soddisfare: • la massima armonica contenuta nella forzante deve risultare compresa nella “banda passante” del modello
0ΩFn
0Ω> Fn nM
ω
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
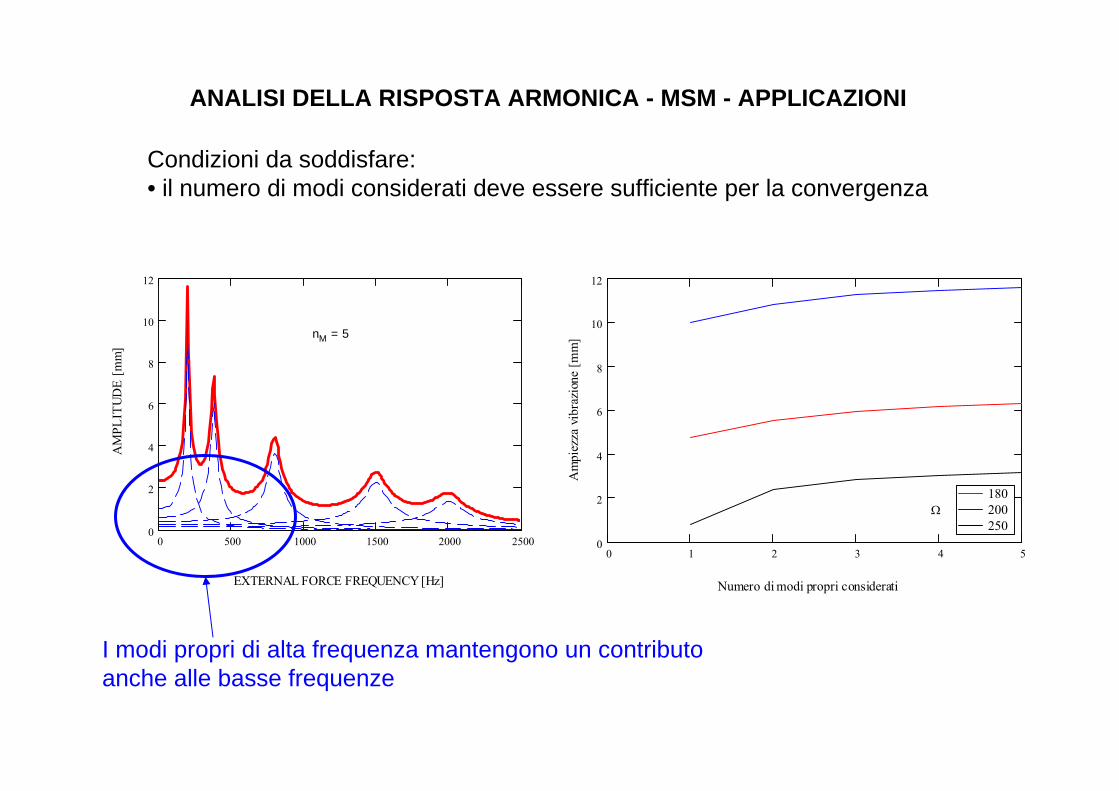
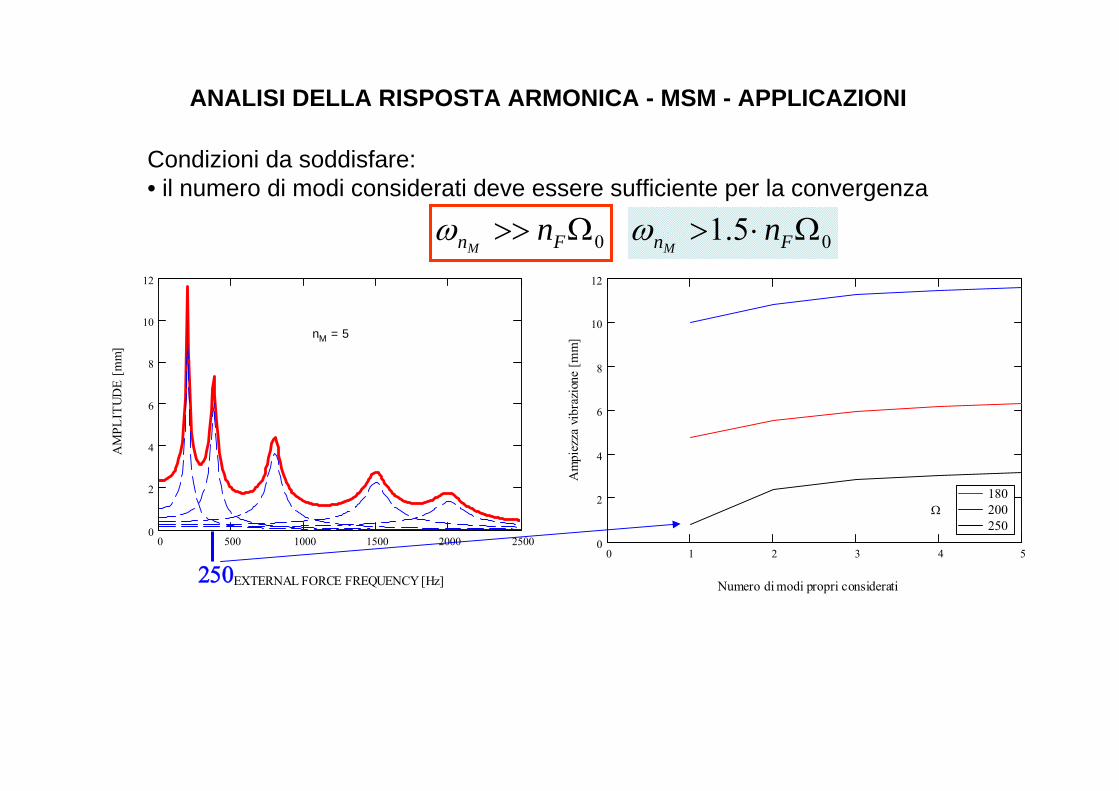
Condizioni da soddisfare: • il numero di modi considerati deve essere sufficiente per la convergenza
0 1 2 3 4 50
2
4
6
8
10
12
180200250
Numero di modi propri consideratiA
mpi
ezza
vib
razi
one
[mm
]
Ω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 5
I modi propri di alta frequenza mantengono un contributo anche alle basse frequenze
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
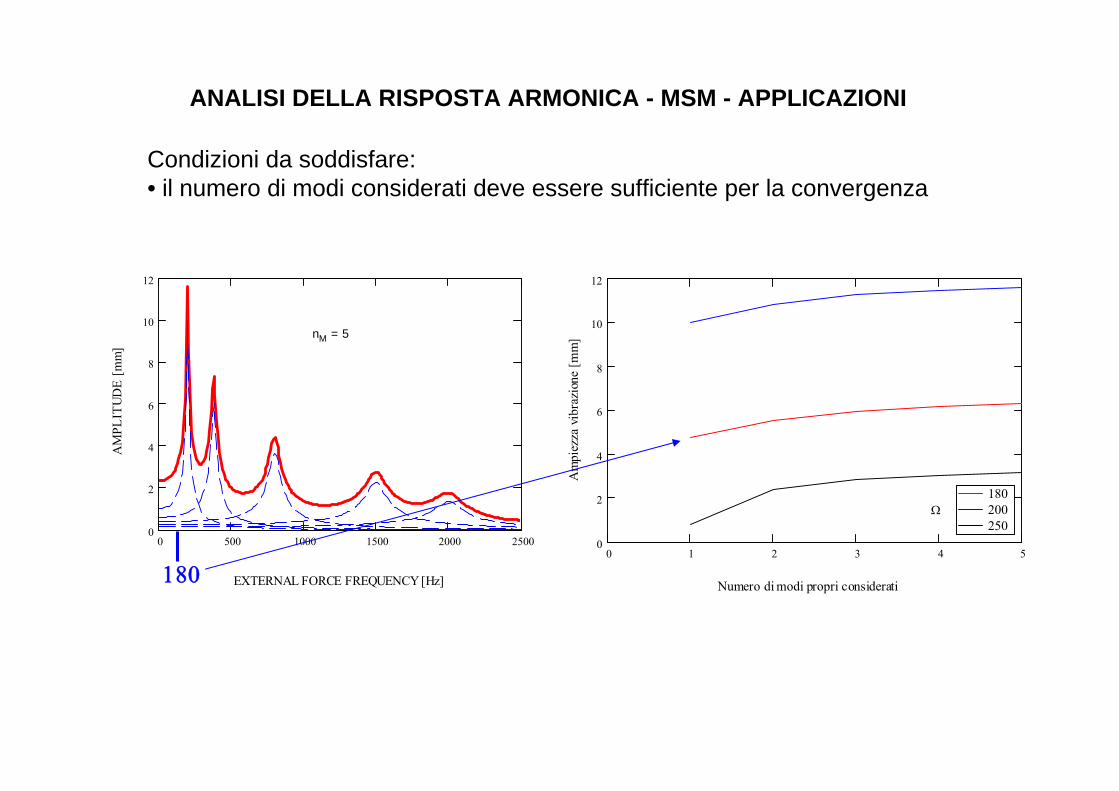
Condizioni da soddisfare: • il numero di modi considerati deve essere sufficiente per la convergenza
0 1 2 3 4 50
2
4
6
8
10
12
180200250
Numero di modi propri consideratiA
mpi
ezza
vib
razi
one
[mm
]
Ω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 5
180
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
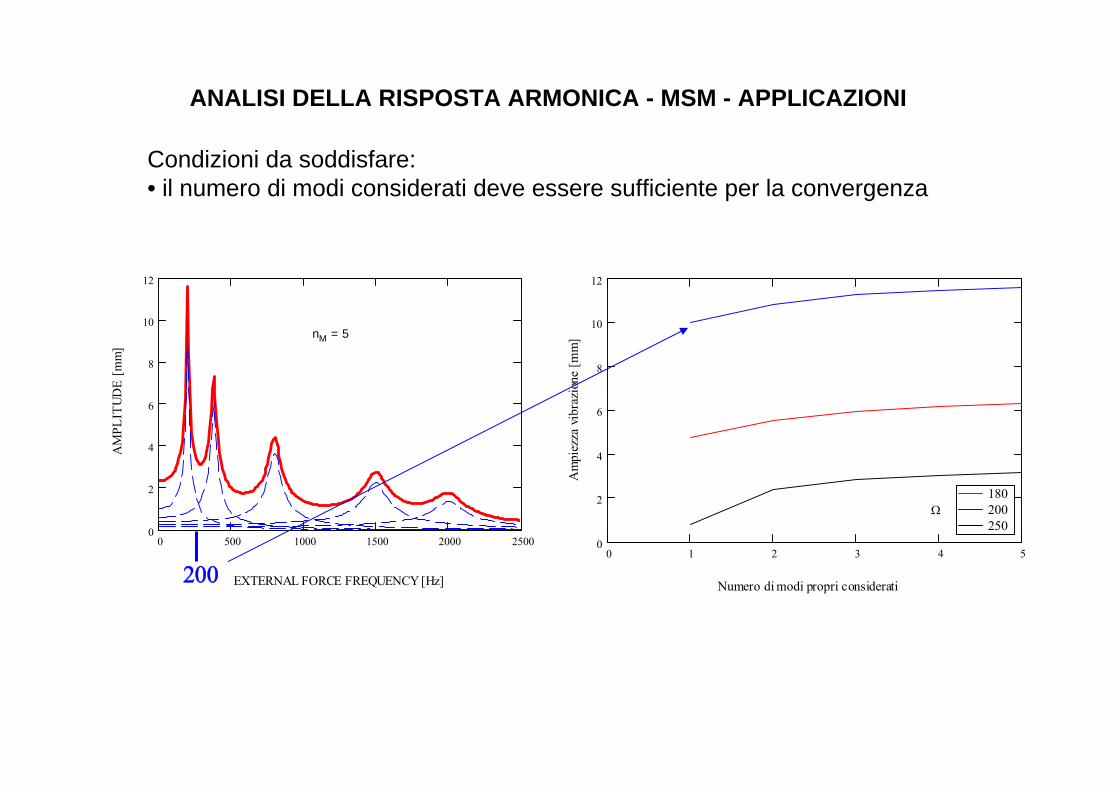
Condizioni da soddisfare: • il numero di modi considerati deve essere sufficiente per la convergenza
0 1 2 3 4 50
2
4
6
8
10
12
180200250
Numero di modi propri consideratiA
mpi
ezza
vib
razi
one
[mm
]
Ω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 5
200
ANALISI DELLA RISPOSTA ARMONICA - MSM - APPLICAZIONI
Condizioni da soddisfare: • il numero di modi considerati deve essere sufficiente per la convergenza
0 1 2 3 4 50
2
4
6
8
10
12
180200250
Numero di modi propri consideratiA
mpi
ezza
vib
razi
one
[mm
]
Ω
0 500 1000 1500 2000 25000
2
4
6
8
10
12
EXTERNAL FORCE FREQUENCY [Hz]
AM
PLIT
UDE
[mm
]
nM = 5
250
0Ω>> Fn nM
ω 05.1 Ω⋅> Fn nM
ω
ANALISI DELLA RISPOSTA ARMONICA – MSM + MD - APPLICAZIONI
Ulteriore requisito per MD e per MSM:• il modello FEM deve essere costruito in maniera da rappresentare in
maniera sufficientemente accurata tutti i modi che danno un contributo significativo alla risposta del sistema (tutti gli nM modi propri nel caso del MSM)
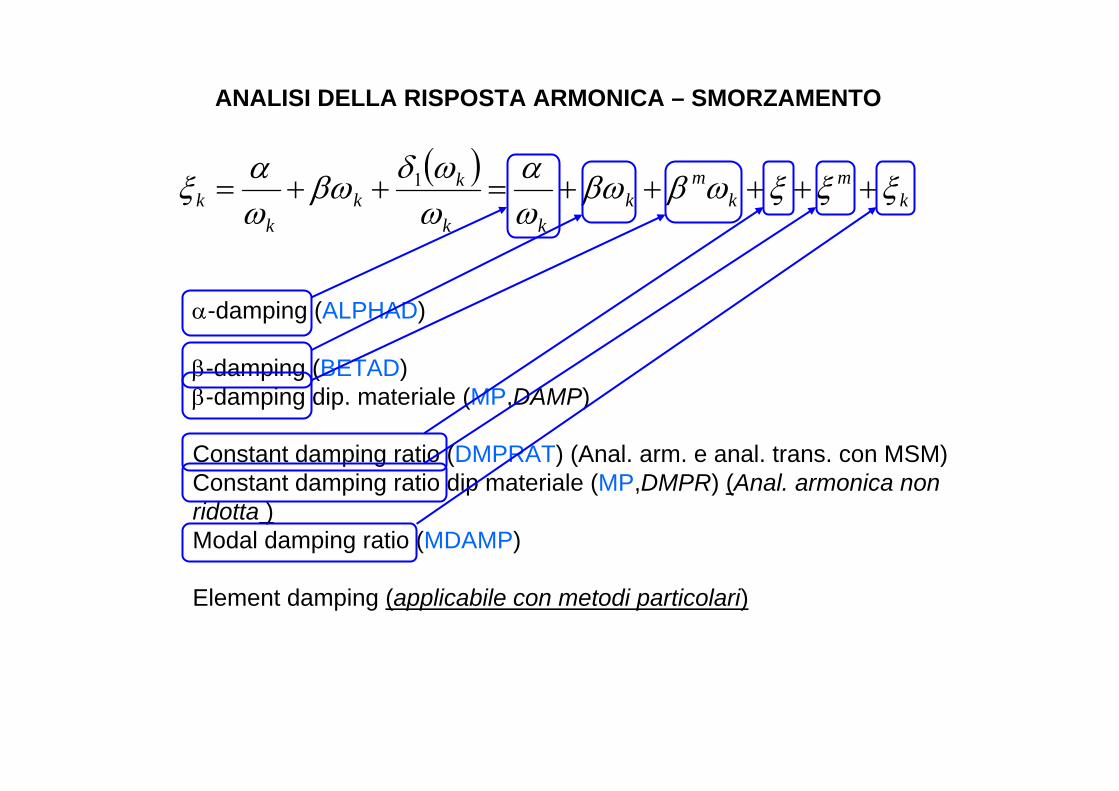
ANALISI DELLA RISPOSTA ARMONICA – SMORZAMENTO
α-damping (ALPHAD)
β-damping (BETAD)β-damping dip. materiale (MP,DAMP)
Constant damping ratio (DMPRAT) (Anal. arm. e anal. trans. con MSM)Constant damping ratio dip materiale (MP,DMPR) (Anal. armonica non ridotta )Modal damping ratio (MDAMP)
Element damping (applicabile con metodi particolari)
( )k
mk
mk
kk
kk
kk ξξξωββω
ωα
ωωδβω
ωαξ +++++=++= 1
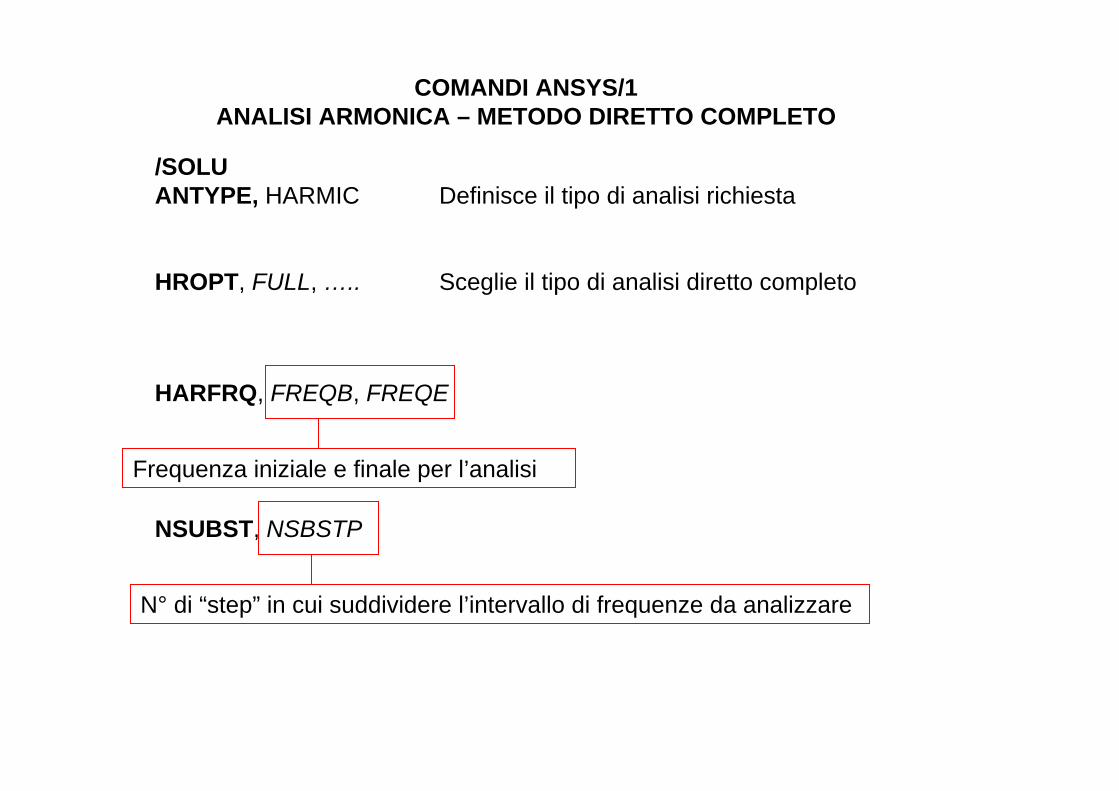
COMANDI ANSYS/1ANALISI ARMONICA – METODO DIRETTO COMPLETO
/SOLUANTYPE, HARMIC Definisce il tipo di analisi richiesta
HROPT, FULL, ….. Sceglie il tipo di analisi diretto completo
HARFRQ, FREQB, FREQE
Frequenza iniziale e finale per l’analisi
NSUBST, NSBSTP
N° di “step” in cui suddividere l’intervallo di frequenze da analizzare
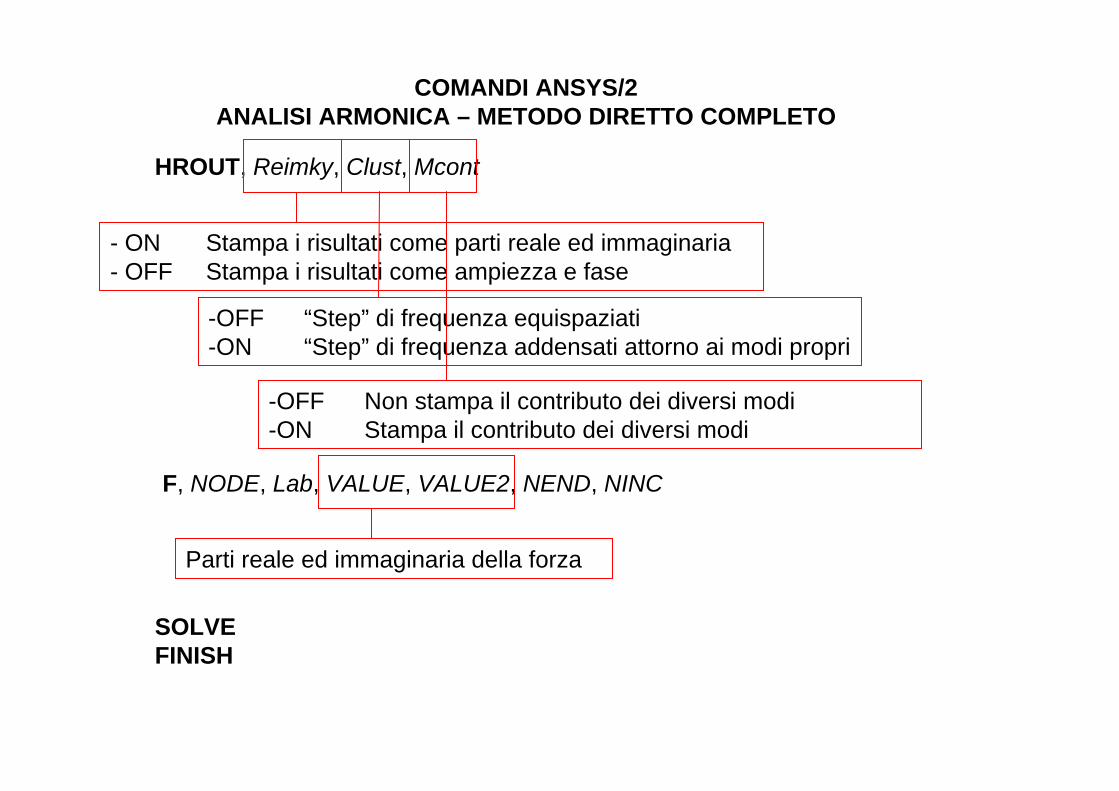
COMANDI ANSYS/2ANALISI ARMONICA – METODO DIRETTO COMPLETO
HROUT, Reimky, Clust, Mcont
- ON Stampa i risultati come parti reale ed immaginaria - OFF Stampa i risultati come ampiezza e fase
-OFF “Step” di frequenza equispaziati-ON “Step” di frequenza addensati attorno ai modi propri
-OFF Non stampa il contributo dei diversi modi-ON Stampa il contributo dei diversi modi
F, NODE, Lab, VALUE, VALUE2, NEND, NINC
Parti reale ed immaginaria della forza
SOLVEFINISH
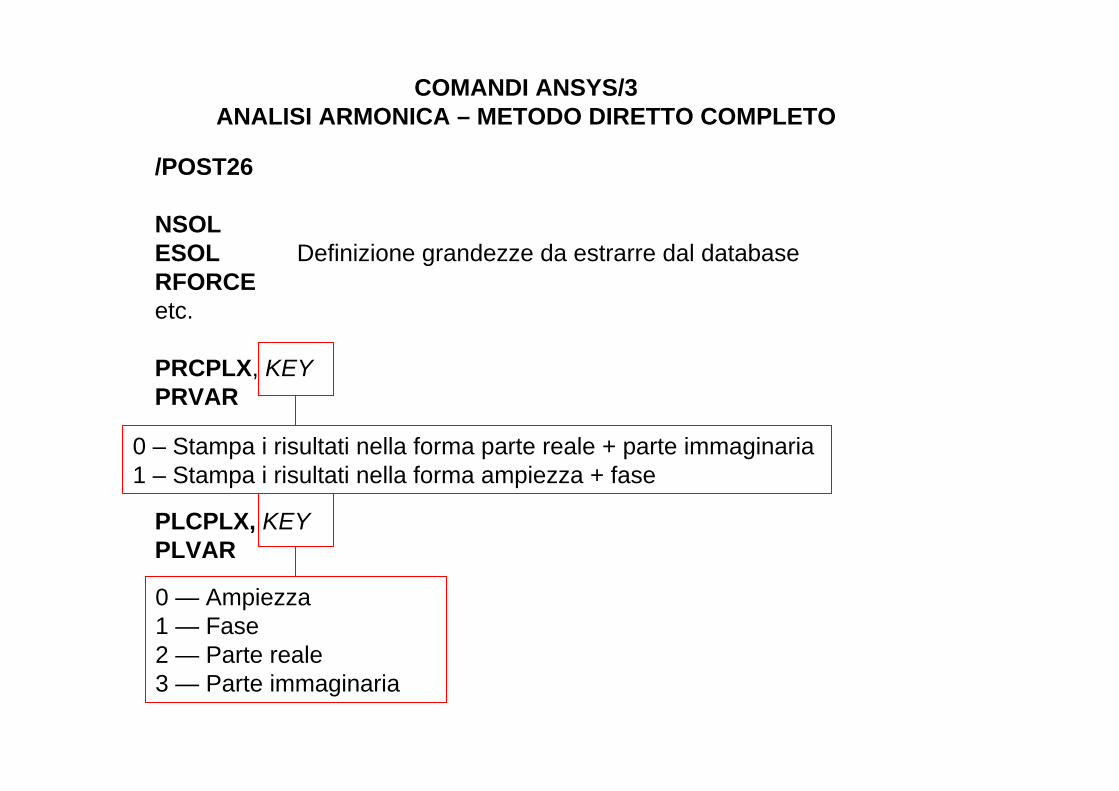
COMANDI ANSYS/3ANALISI ARMONICA – METODO DIRETTO COMPLETO
/POST26
NSOLESOL Definizione grandezze da estrarre dal databaseRFORCEetc.
PRCPLX, KEYPRVAR
0 – Stampa i risultati nella forma parte reale + parte immaginaria1 – Stampa i risultati nella forma ampiezza + fase
PLCPLX, KEYPLVAR
0 — Ampiezza 1 — Fase 2 — Parte reale 3 — Parte immaginaria
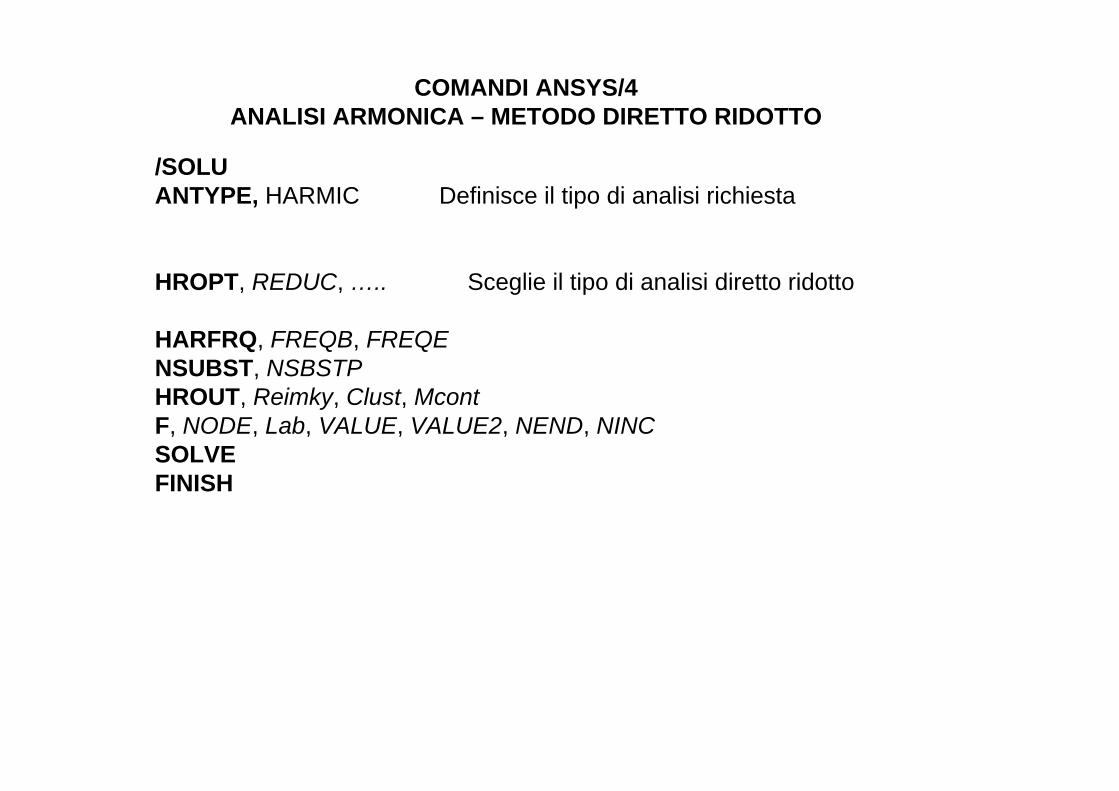
COMANDI ANSYS/4ANALISI ARMONICA – METODO DIRETTO RIDOTTO
/SOLUANTYPE, HARMIC Definisce il tipo di analisi richiesta
HROPT, REDUC, ….. Sceglie il tipo di analisi diretto ridotto
HARFRQ, FREQB, FREQENSUBST, NSBSTPHROUT, Reimky, Clust, McontF, NODE, Lab, VALUE, VALUE2, NEND, NINCSOLVEFINISH
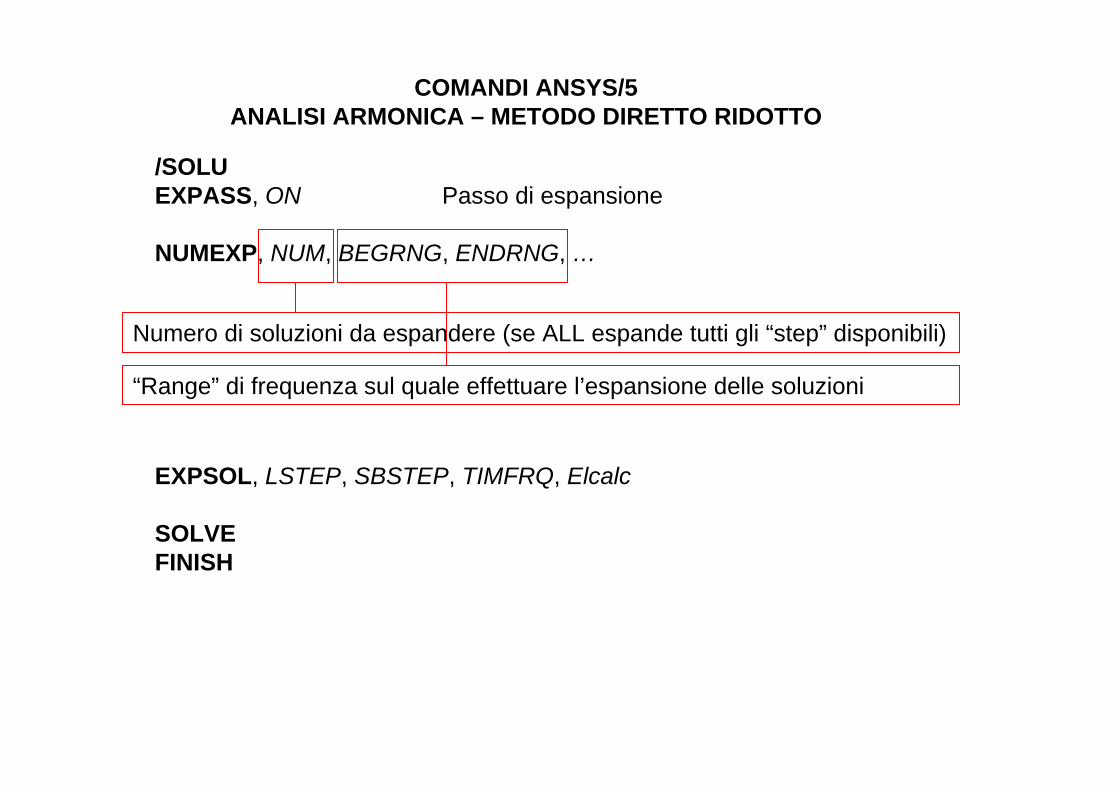
COMANDI ANSYS/5ANALISI ARMONICA – METODO DIRETTO RIDOTTO
/SOLUEXPASS, ON Passo di espansione
NUMEXP, NUM, BEGRNG, ENDRNG, …
Numero di soluzioni da espandere (se ALL espande tutti gli “step” disponibili)
“Range” di frequenza sul quale effettuare l’espansione delle soluzioni
EXPSOL, LSTEP, SBSTEP, TIMFRQ, Elcalc
SOLVEFINISH
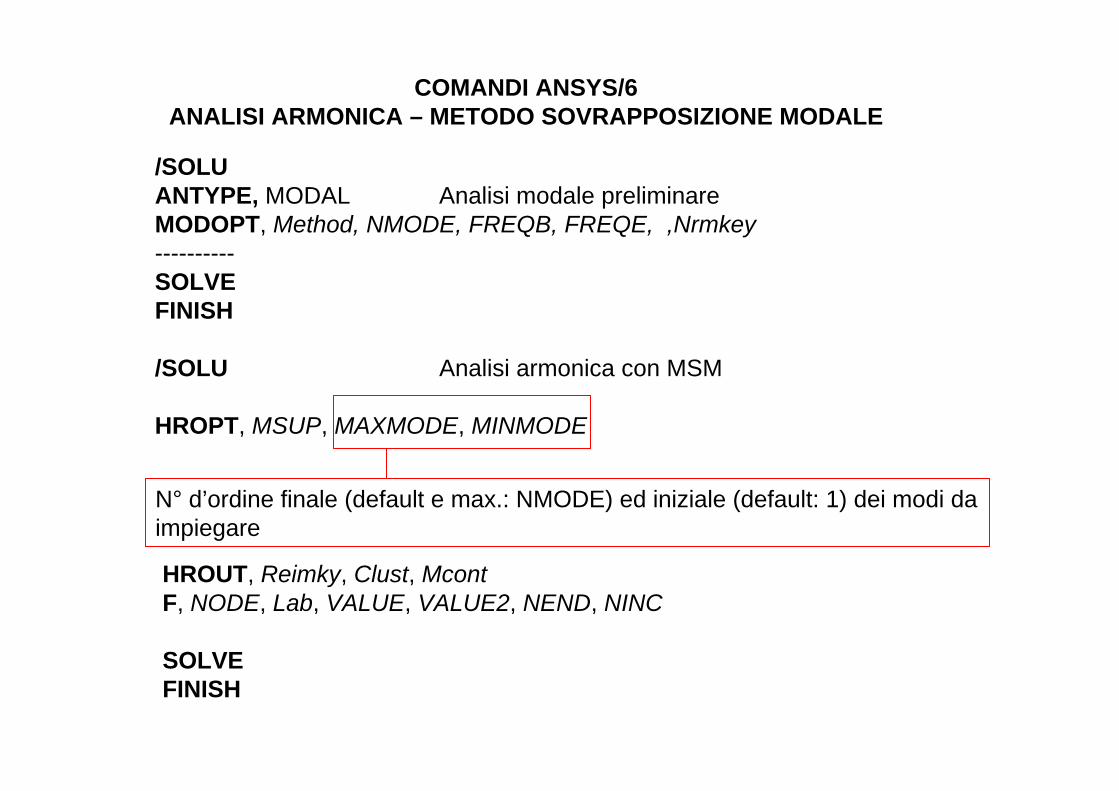
COMANDI ANSYS/6ANALISI ARMONICA – METODO SOVRAPPOSIZIONE MODALE
/SOLUANTYPE, MODAL Analisi modale preliminareMODOPT, Method, NMODE, FREQB, FREQE, ,Nrmkey----------SOLVEFINISH
/SOLU Analisi armonica con MSM
HROPT, MSUP, MAXMODE, MINMODE
N° d’ordine finale (default e max.: NMODE) ed iniziale (default: 1) dei modi da impiegare
HROUT, Reimky, Clust, McontF, NODE, Lab, VALUE, VALUE2, NEND, NINC
SOLVEFINISH
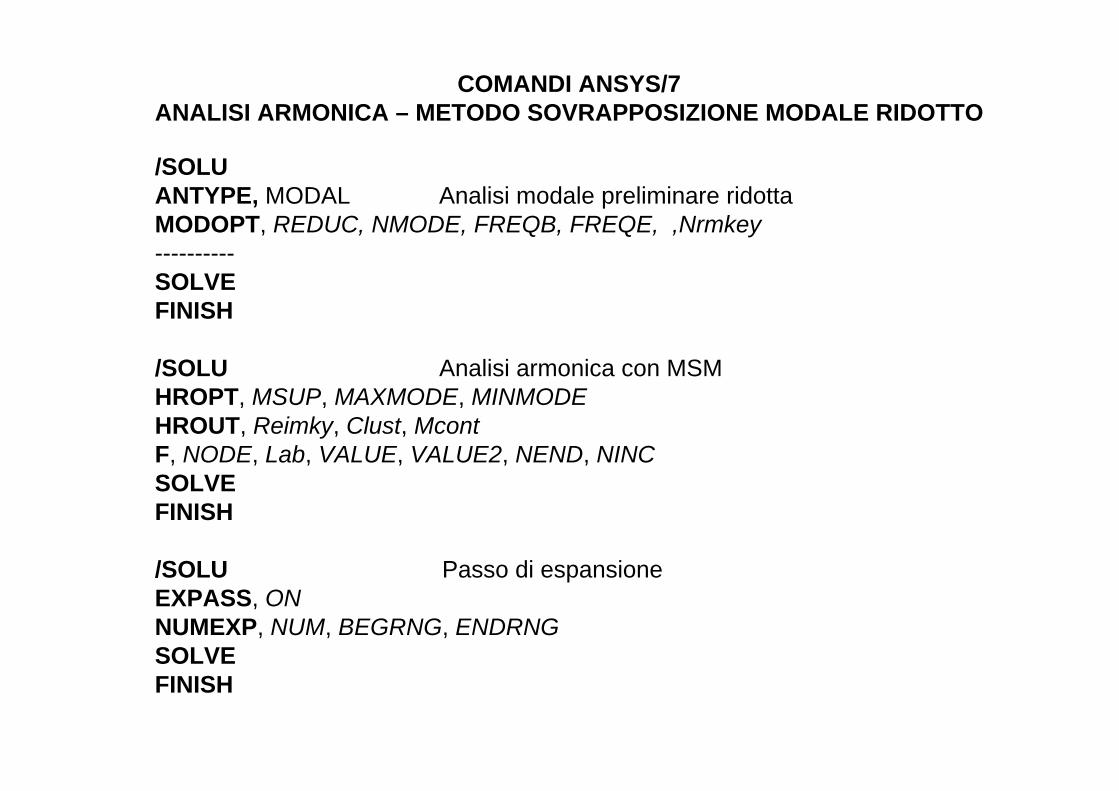
COMANDI ANSYS/7ANALISI ARMONICA – METODO SOVRAPPOSIZIONE MODALE RIDOTTO
/SOLUANTYPE, MODAL Analisi modale preliminare ridottaMODOPT, REDUC, NMODE, FREQB, FREQE, ,Nrmkey----------SOLVEFINISH
/SOLU Analisi armonica con MSMHROPT, MSUP, MAXMODE, MINMODEHROUT, Reimky, Clust, McontF, NODE, Lab, VALUE, VALUE2, NEND, NINCSOLVEFINISH
/SOLU Passo di espansioneEXPASS, ONNUMEXP, NUM, BEGRNG, ENDRNGSOLVEFINISH
ANALISI DI TRANSITORIO DINAMICO
SCOPO: Valutare la risposta del sistema in presenza di forze o sollecitazioni esterne, generalmente di tipo non periodico, applicate abbastanza rapidamente da rendere non trascurabili gli effetti delle forze di inerzia.
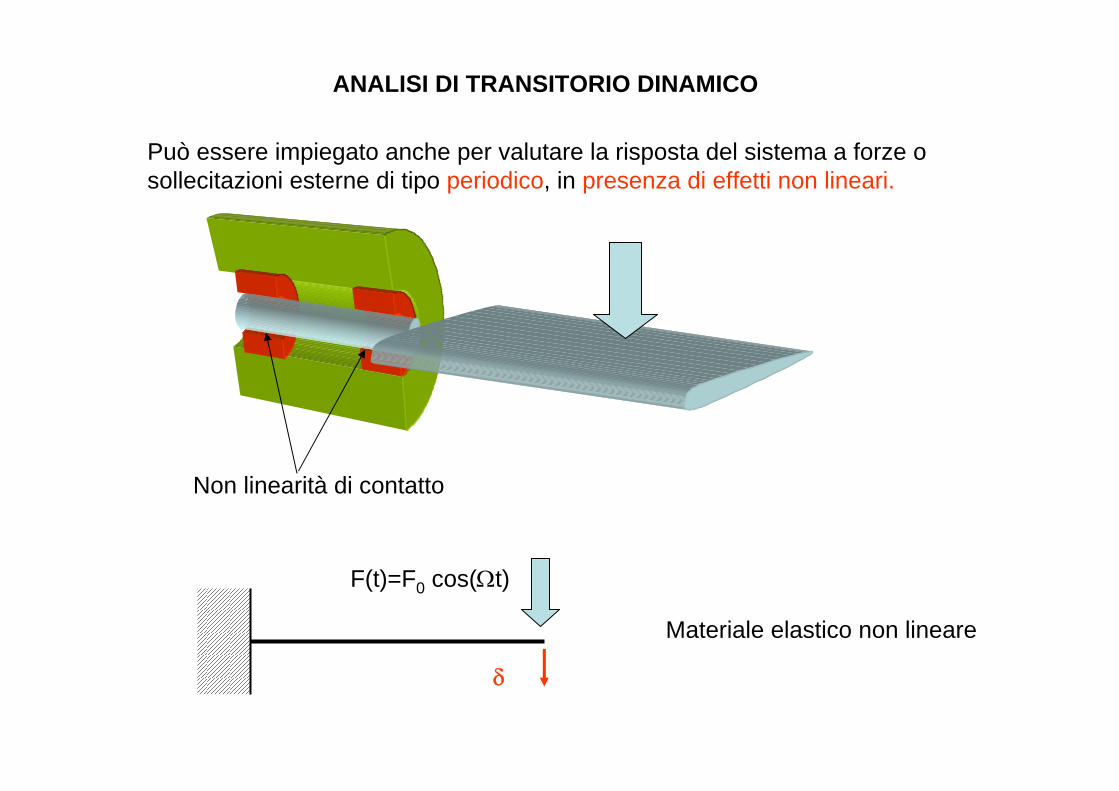
ANALISI DI TRANSITORIO DINAMICO
Può essere impiegato anche per valutare la risposta del sistema a forze o sollecitazioni esterne di tipo periodico, in presenza di effetti non lineari.
Non linearità di contatto
F(t)=F0 cos(Ωt)
δ
Materiale elastico non lineare
Principali tecniche di soluzione:Metodo di sovrapposizione modale (MSM)
Ipotesi: • Struttura in campo lineare, con matrici [M], [C] e [K] costanti• Matrice di smorzamento proporzionale o costante
Metodi di integrazione diretta (MID)Ipotesi:
• Struttura oprante anche in campo non lineare• Matrici [M], [C] e [K] anche non costanti• Matrice di smorzamento qualsiasi
ANALISI DI TRANSITORIO DINAMICO
ANALISI DI TRANSITORIO DINAMICO
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)(
{ } { } ( )tftFYYY kTkkkkkkk =Φ=++ )(2 2ωωξ &&&
Soluzione della equazione relativa ad ogni modo con metodi “passo-passo”(Es. Runge-Kutta)
Soluzione: metodo di sovrapposizione modale (MSM)
L’intervallo temporale in cui si vuole studiare il comportamento del sistema viene suddiviso in intervalli (“passi”) temporali successivi.
ANALISI DI TRANSITORIO DINAMICO - MID
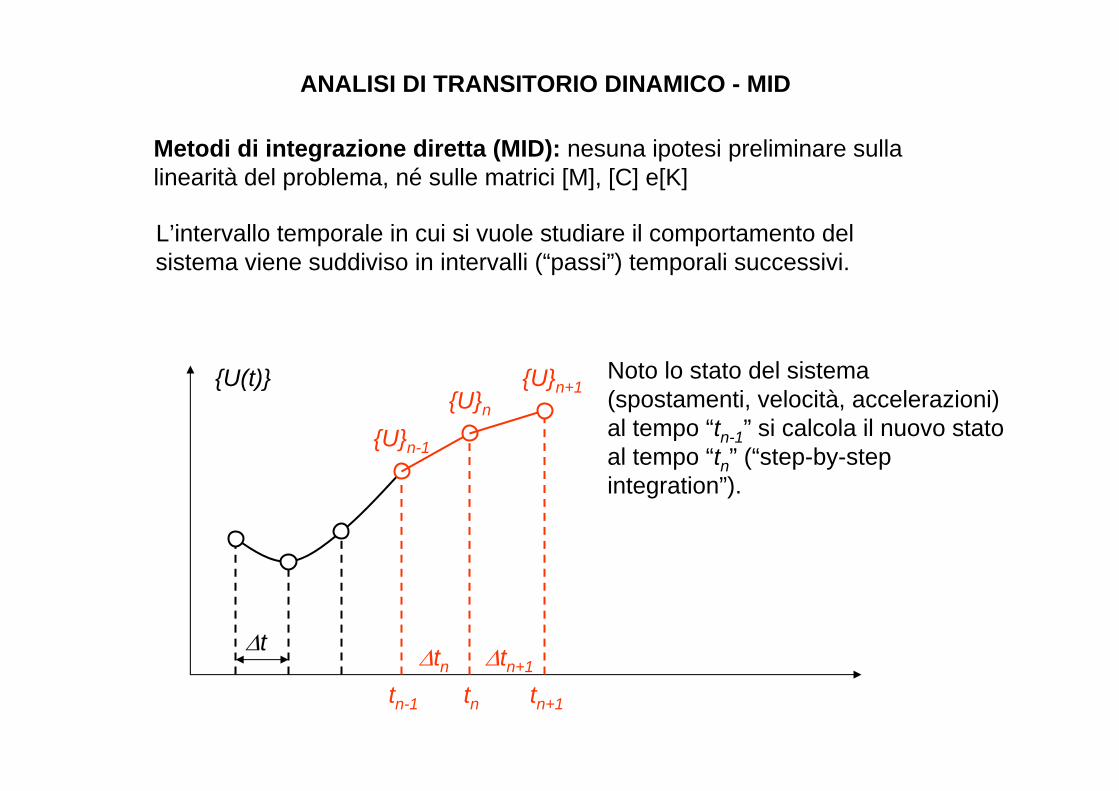
Metodi di integrazione diretta (MID): nesuna ipotesi preliminare sulla linearità del problema, né sulle matrici [M], [C] e[K]
{U(t)}
Δt
Noto lo stato del sistema (spostamenti, velocità, accelerazioni) al tempo “tn-1” si calcola il nuovo stato al tempo “tn” (“step-by-stepintegration”).
tn-1
{U}n-1
tn
Δtn
{U}n
tn+1
Δtn+1
{U}n+1
Tra i metodi di integrazione diretta, rientrano due tipi principali di algoritmi:
Algoritmi di tipo implicito: la soluzione al passo temporale n+1 è ottenuta tramite la conoscenza della soluzione al passo n e delle condizioni imposte al passo n+1 (Es.: metodo di Newmark)
Algoritmi di tipo esplicito: la soluzione al passo temporale n+1 è ottenuta tramite la conoscenza della soluzione e delle condizioni imposte al passo n(Es.: metodo delle differenze centrali)
ANALISI DI TRANSITORIO DINAMICO - MID
Metodi di integrazione diretta (MID): nesuna ipotesi preliminare sulla linearità del problema, né sulle matrici [M], [C] e[K]
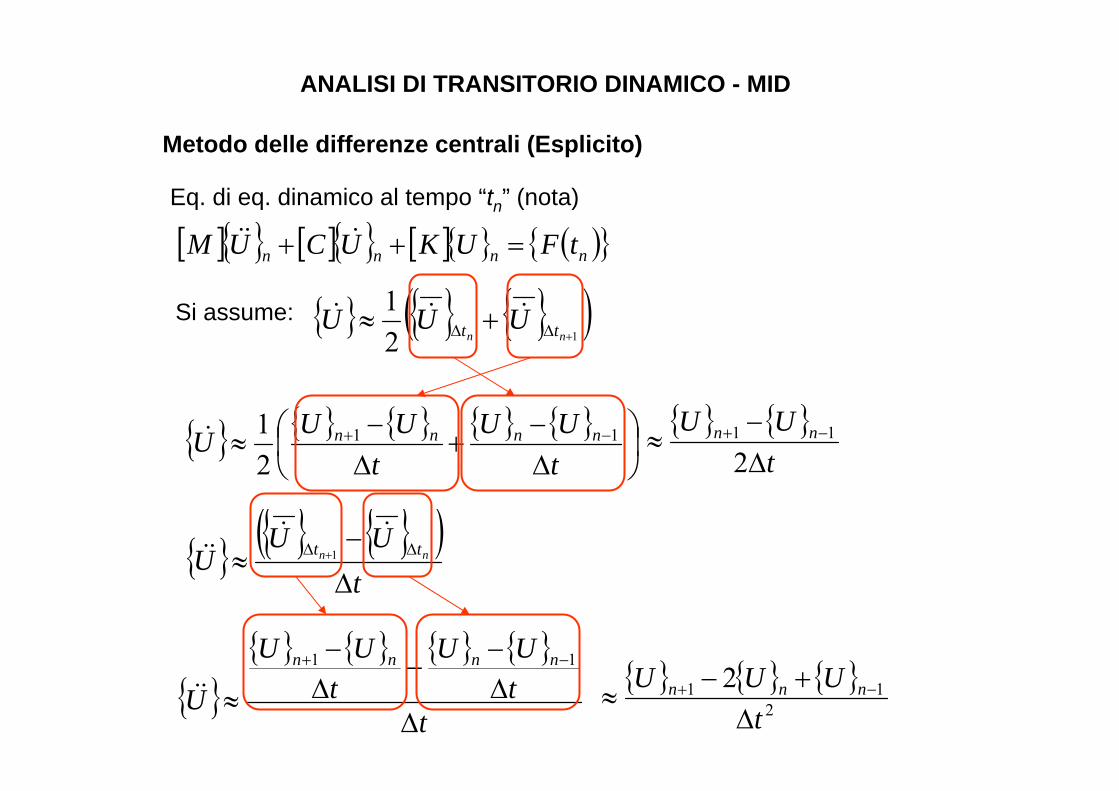
Metodo delle differenze centrali (Esplicito)
[ ]{ } [ ]{ } [ ]{ } ( ){ }nnnn tFUKUCUM =++ &&&
Eq. di eq. dinamico al tempo “tn” (nota)
Si assume:
{ } { } { } { } { }⎟⎠⎞
⎜⎝⎛
Δ−
+Δ−
≈ −+
tUU
tUUU nnnn 11
21&
ANALISI DI TRANSITORIO DINAMICO - MID
{ }{ } { } { } { }
ttUU
tUU
Unnnn
ΔΔ−
−Δ−
≈−+ 11
&&
{ } { } { }( )12
1+ΔΔ +≈
nn tt UUU &&&
{ } { }tUU nn
Δ−
≈ −+
211
{ } { } { }( )t
UUU nn tt
Δ
−≈ ΔΔ +
&&&& 1
{ } { } { }2
11 2t
UUU nnn
Δ+−
≈ −+
Metodo delle differenze centrali (Esplicito)
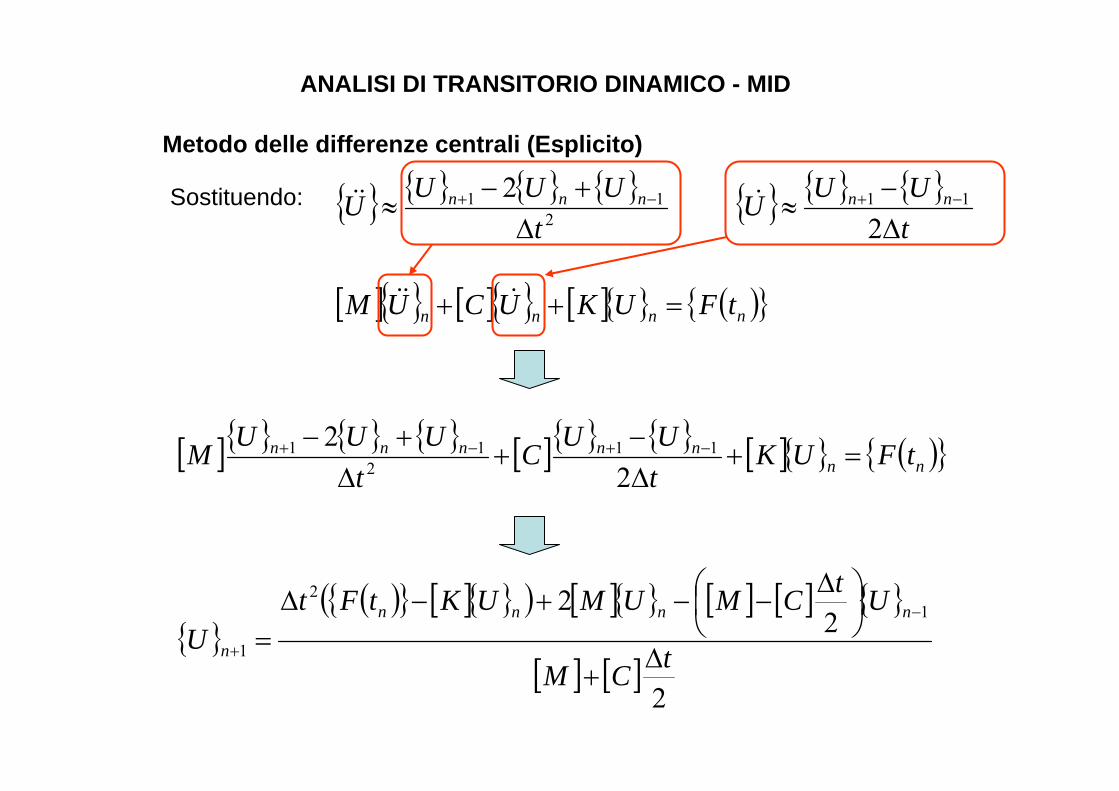
[ ]{ } [ ]{ } [ ]{ } ( ){ }nnnn tFUKUCUM =++ &&&
{ } { } { } { }2
11 2t
UUUU nnn
Δ+−
≈ −+&&
[ ]{ } { } { } [ ]{ } { } [ ]{ } ( ){ }nnnnnnn tFUK
tUUC
tUUUM =+
Δ−
+Δ
+− −+−+
22 11
211
Sostituendo:
{ }( ){ } [ ]{ }( ) [ ]{ } [ ] [ ] { }
[ ] [ ]2
22 1
2
1 tCM
UtCMUMUKtFtU
nnnn
n Δ+
⎟⎠⎞
⎜⎝⎛ Δ
−−+−Δ=
−
+
ANALISI DI TRANSITORIO DINAMICO - MID
{ } { } { }tUUU nn
Δ−
≈ −+
211&
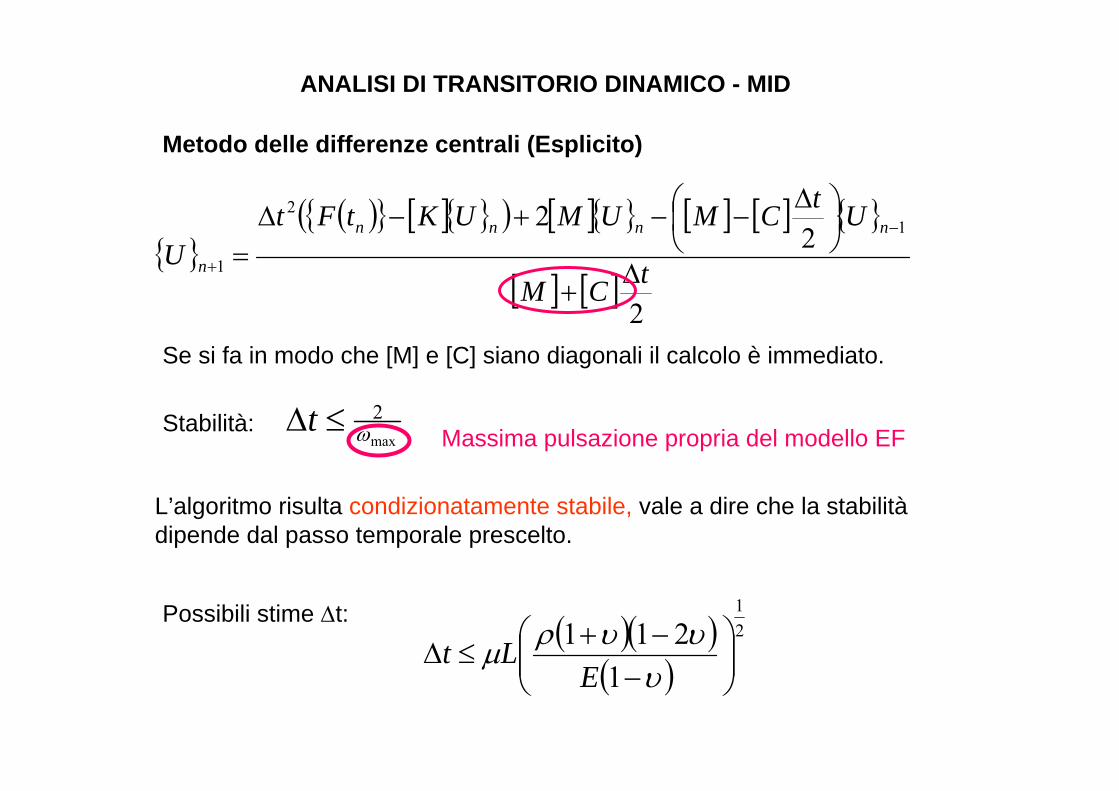
Metodo delle differenze centrali (Esplicito)
{ }( ){ } [ ]{ }( ) [ ]{ } [ ] [ ] { }
[ ] [ ]2
22 1
2
1 tCM
UtCMUMUKtFtU
nnnn
n Δ+
⎟⎠⎞
⎜⎝⎛ Δ
−−+−Δ=
−
+
Se si fa in modo che [M] e [C] siano diagonali il calcolo è immediato.
Stabilità:max
2ω≤Δt Massima pulsazione propria del modello EF
Possibili stime Δt: ( )( )( )
21
1211
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−+≤Δ
υυυρμ
ELt
ANALISI DI TRANSITORIO DINAMICO - MID
L’algoritmo risulta condizionatamente stabile, vale a dire che la stabilitàdipende dal passo temporale prescelto.
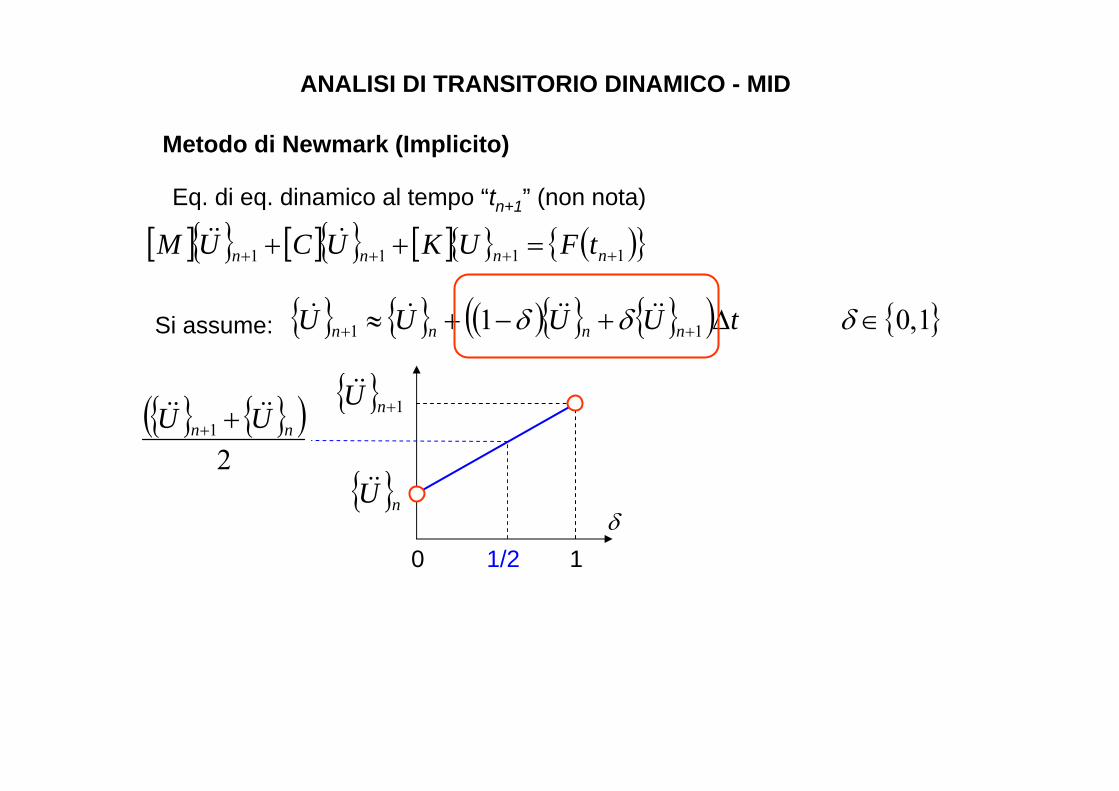
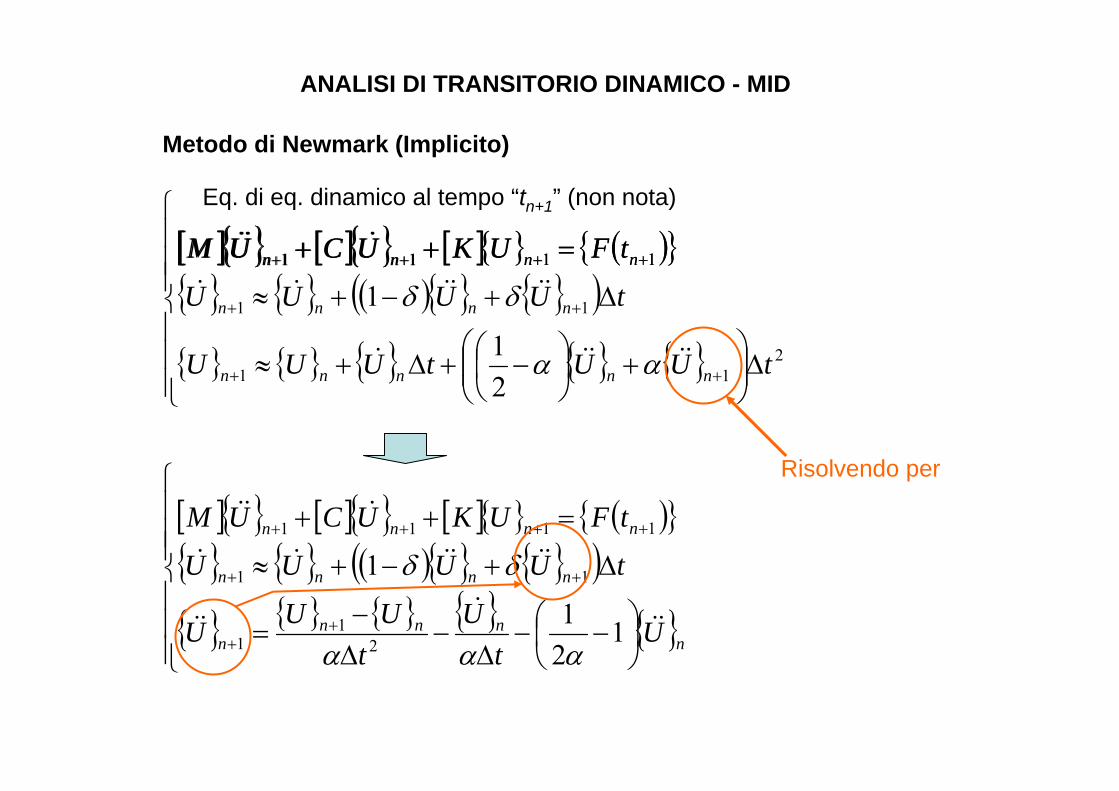
Metodo di Newmark (Implicito)
[ ]{ } [ ]{ } [ ]{ } ( ){ }1111 ++++ =++ nnnn tFUKUCUM &&&
Eq. di eq. dinamico al tempo “tn+1” (non nota)
Si assume: { } { } ( ){ } { }( ) { }1,01 11 ∈Δ+−+≈ ++ δδδ tUUUU nnnn&&&&&&
ANALISI DI TRANSITORIO DINAMICO - MID
δ0 1
{ }nU&&
{ } 1+nU&&
1/2
{ } { }( )2
1 nn UU &&&& ++
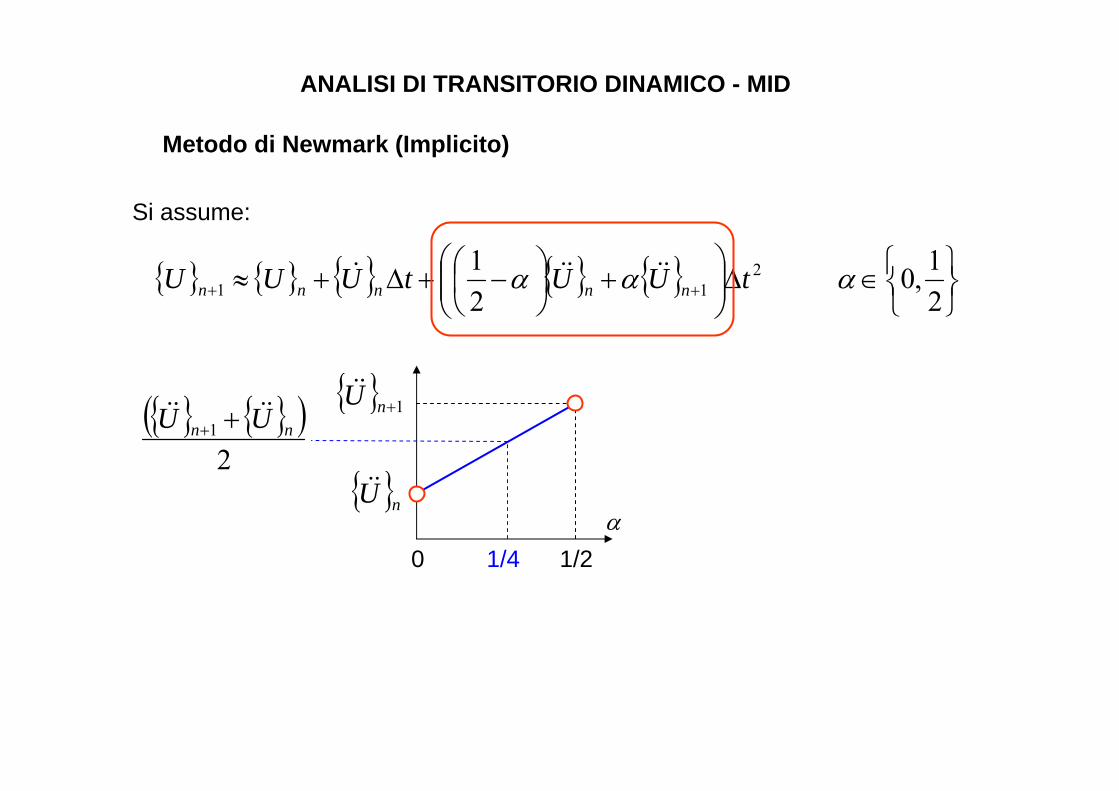
Metodo di Newmark (Implicito)
Si assume:
ANALISI DI TRANSITORIO DINAMICO - MID
{ } { } { } { } { }⎭⎬⎫
⎩⎨⎧∈Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛ −+Δ+≈ ++ 2
1,021 2
11 ααα tUUtUUU nnnnn&&&&&
α0 1/2
{ }nU&&
{ } 1+nU&&
1/4
{ } { }( )2
1 nn UU &&&& ++
Metodo di Newmark (Implicito)
[ ]{ } [ ]{ } [ ]{ } ( ){ }1111 ++++ =++ nnnn tFUKUCUM &&&
Eq. di eq. dinamico al tempo “tn+1” (non nota)
[ ]{ } [ ]{ } [ ]{ } ( ){ }{ } { } ( ){ } { }( ){ } { } { } { } { }
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
Δ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛ −+Δ+≈
Δ+−+≈
=++
++
++
++++
211
11
1111
21
1
tUUtUUU
tUUUU
tFUKUCUM
nnnnn
nnnn
nnnn
&&&&&
&&&&&&
&&&
αα
δδ
Risolvendo per
ANALISI DI TRANSITORIO DINAMICO - MID
[ ]{ } [ ]{ } [ ]{ } ( ){ }{ } { } ( ){ } { }( ){ } { } { } { } { }
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛ −−
Δ−
Δ−
=
Δ+−+≈
=++
++
++
++++
nnnn
n
nnnn
nnnn
Ut
Ut
UUU
tUUUU
tFUKUCUM
&&&
&&
&&&&&&
&&&
121
1
21
1
11
1111
ααα
δδ
Metodo di Newmark (Implicito)
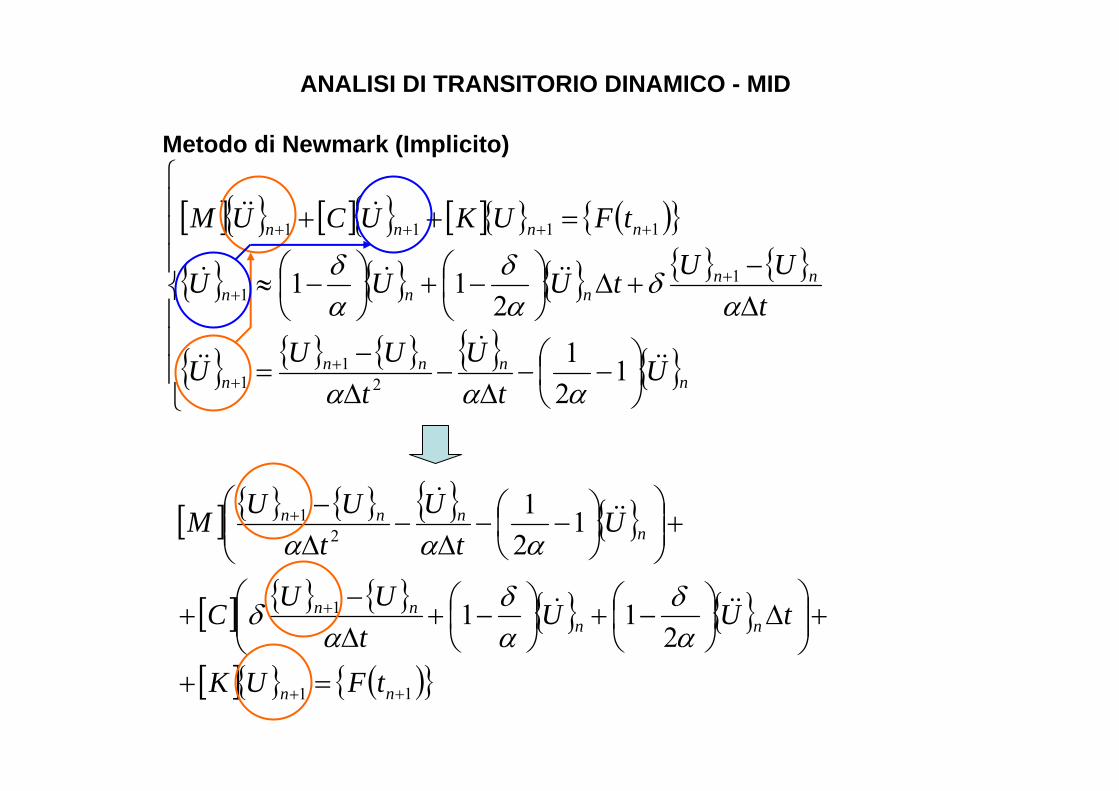
ANALISI DI TRANSITORIO DINAMICO - MID
[ ]{ } [ ]{ } [ ]{ } ( ){ }
{ } { } { } { } { }
{ } { } { } { } { }⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛ −−
Δ−
Δ−
=
Δ−
+Δ⎟⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ −≈
=++
++
++
++++
nnnn
n
nnnnn
nnnn
Ut
Ut
UUU
tUUtUUU
tFUKUCUM
&&&
&&
&&&&
&&&
121
211
21
1
11
1111
ααα
αδ
αδ
αδ
[ ] { } { } { } { }
[ ] { } { } { } { }[ ]{ } ( ){ }11
1
21
211
121
++
+
+
=+
+⎟⎟⎠
⎞⎜⎜⎝
⎛Δ⎟
⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ −+
Δ−
+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −−
Δ−
Δ−
nn
nnnn
nnnn
tFUK
tUUtUUC
Ut
Ut
UUM
&&&
&&&
αδ
αδ
αδ
ααα
Metodo di Newmark (Implicito)
ANALISI DI TRANSITORIO DINAMICO - MID
{ } [ ] [ ] [ ] ( ){ }
[ ] { } { } { }
[ ] { } { } { } ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −
Δ+⎟
⎠⎞
⎜⎝⎛ −+
Δ+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −+
Δ+
Δ+
+=⎟⎠⎞
⎜⎝⎛ +
Δ+
Δ ++
nnn
nnn
nn
UtUUt
C
UUt
Ut
M
tFKt
Ct
MU
&&&
&&&
22
1
12111
2
121
αδ
αδ
αδ
ααα
αδ
α
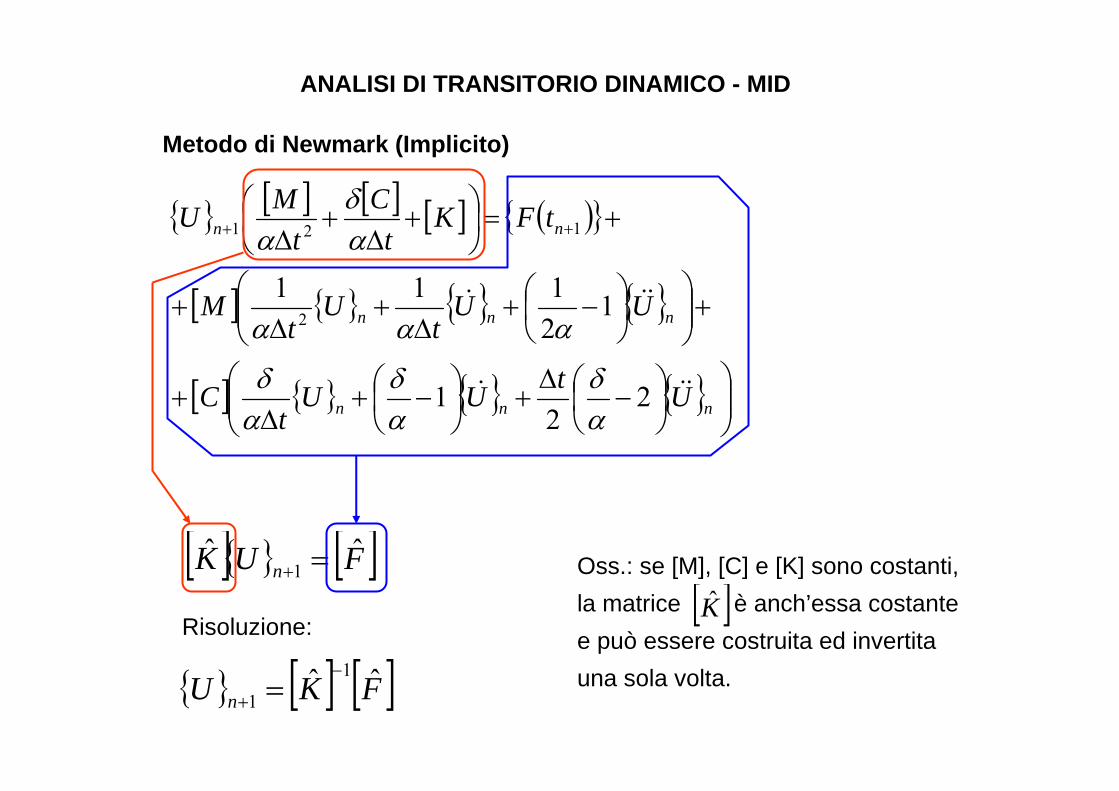
[ ]{ } [ ]FUK nˆˆ
1 =+
Risoluzione:
{ } [ ] [ ]FKU nˆˆ 1
1
−
+ =
Oss.: se [M], [C] e [K] sono costanti, la matrice è anch’essa costante e può essere costruita ed invertita una sola volta.
[ ]K̂
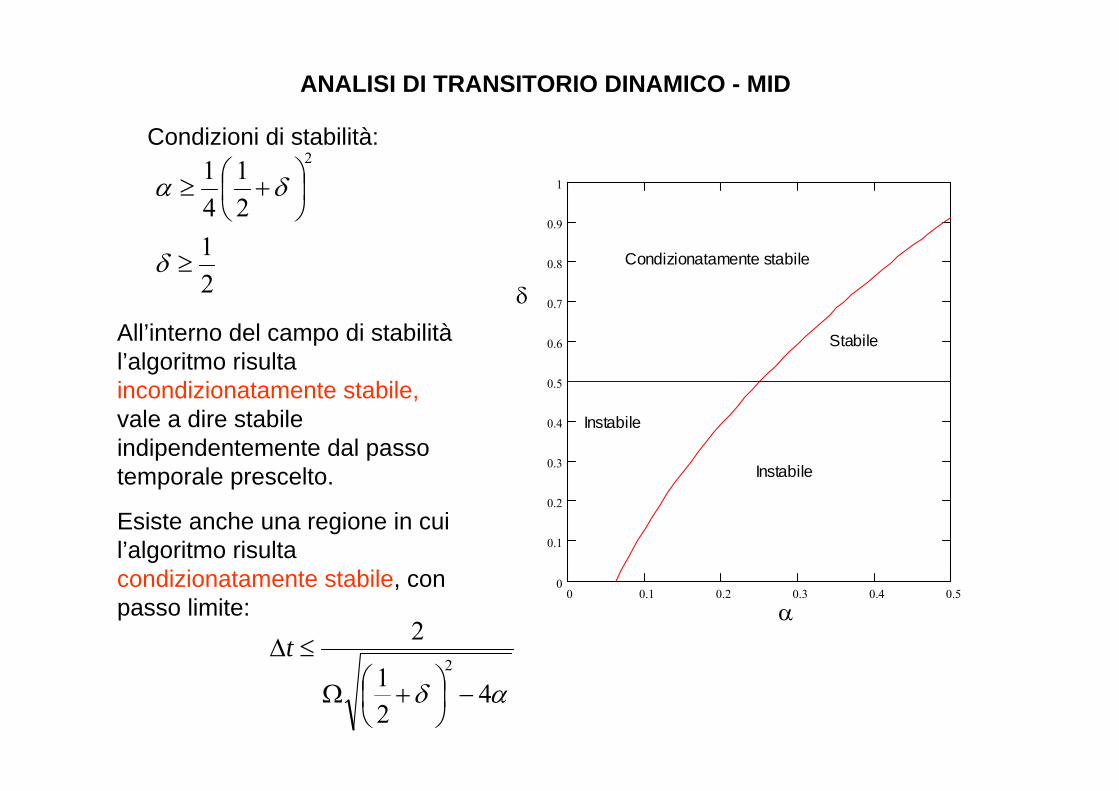
21
21
41 2
≥
⎟⎠⎞
⎜⎝⎛ +≥
δ
δα
Condizioni di stabilità:
ANALISI DI TRANSITORIO DINAMICO - MID
All’interno del campo di stabilitàl’algoritmo risulta incondizionatamente stabile,vale a dire stabile indipendentemente dal passo temporale prescelto.
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
Esiste anche una regione in cui l’algoritmo risulta condizionatamente stabile, con passo limite:
αδ 421
22
−⎟⎠⎞
⎜⎝⎛ +Ω
≤Δt
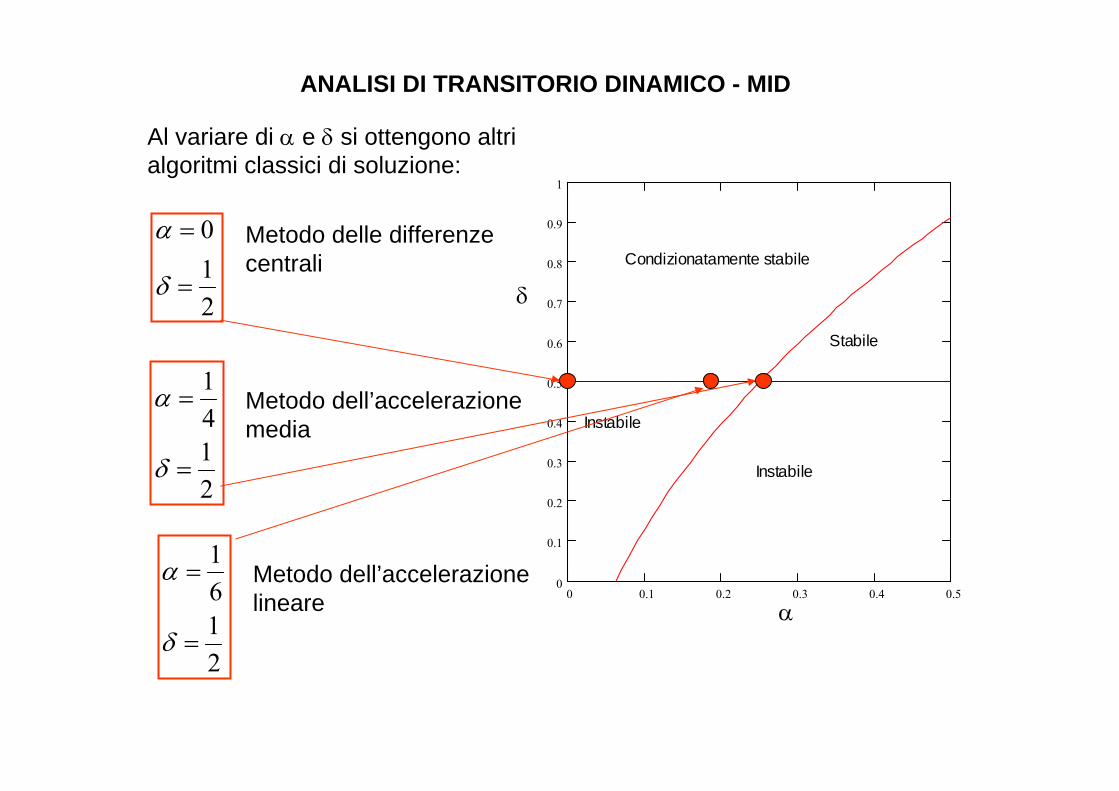
Al variare di α e δ si ottengono altri algoritmi classici di soluzione:
ANALISI DI TRANSITORIO DINAMICO - MID
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
210
=
=
δ
α Metodo delle differenze centrali
2141
=
=
δ
α Metodo dell’accelerazione media
2161
=
=
δ
α Metodo dell’accelerazione lineare
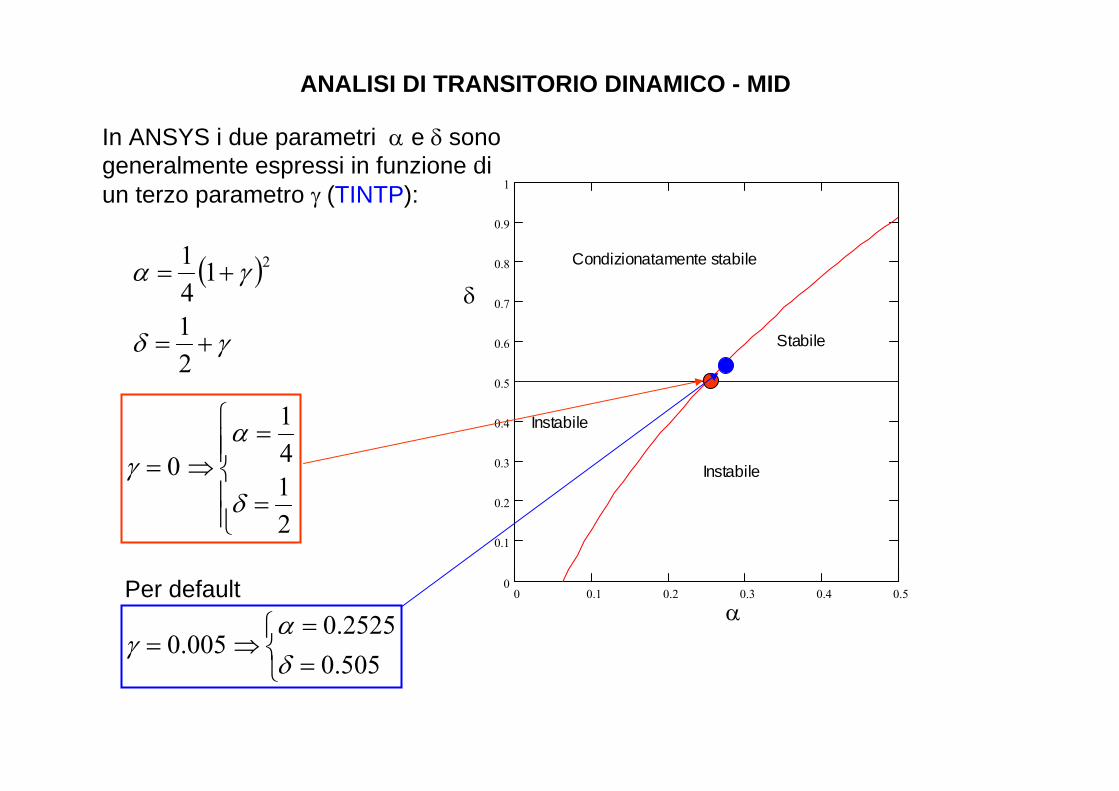
( )
γδ
γα
+=
+=
21
141 2
In ANSYS i due parametri α e δ sono generalmente espressi in funzione di un terzo parametro γ (TINTP):
ANALISI DI TRANSITORIO DINAMICO - MID
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
⎪⎪⎩
⎪⎪⎨
⎧
=
=⇒=
2141
0δ
αγ
⎩⎨⎧
==
⇒=505.02525.0
005.0δα
γ
Per default
ANALISI DI TRANSITORIO DINAMICO - MID
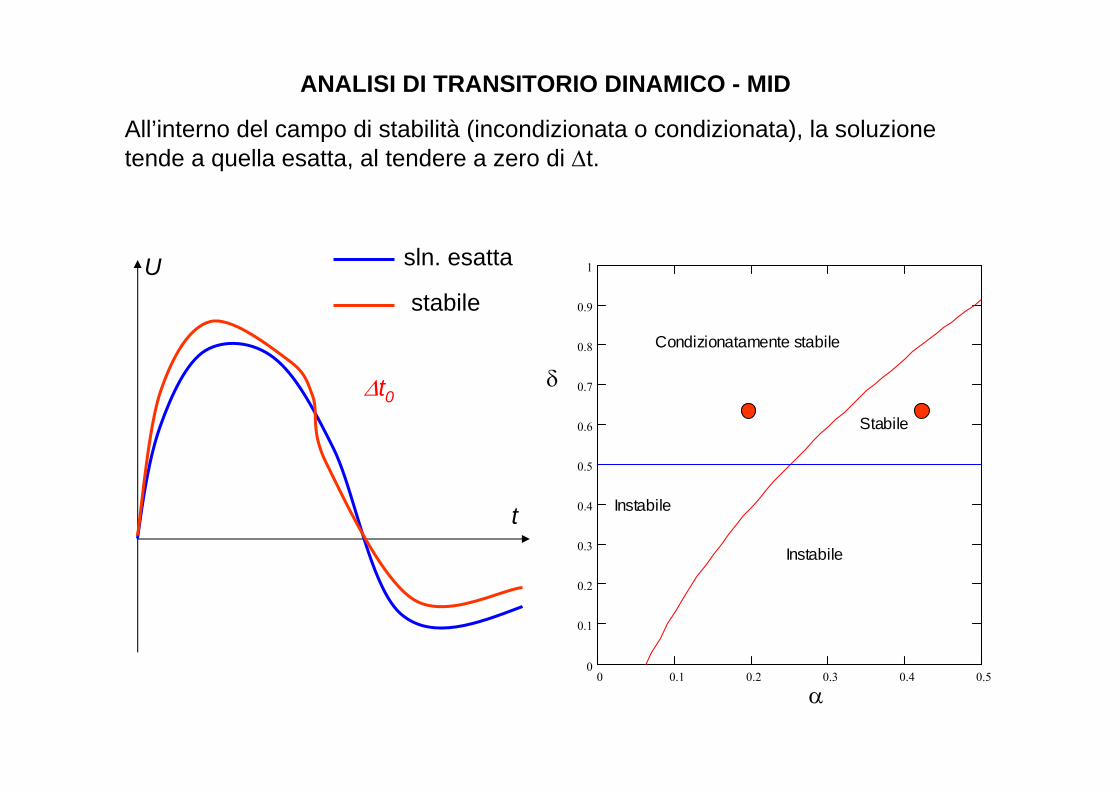
All’interno del campo di stabilità (incondizionata o condizionata), la soluzione tende a quella esatta, al tendere a zero di Δt.
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
U
t
sln. esatta
stabile
Δt0
ANALISI DI TRANSITORIO DINAMICO - MID
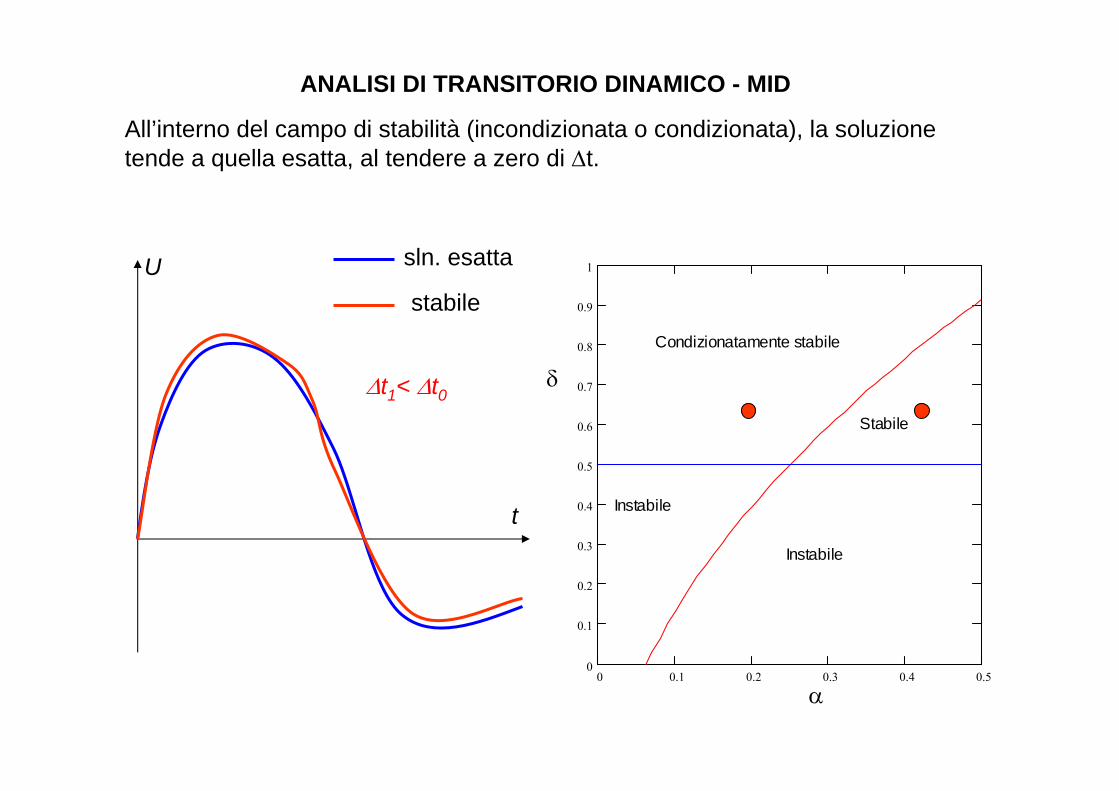
All’interno del campo di stabilità (incondizionata o condizionata), la soluzione tende a quella esatta, al tendere a zero di Δt.
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
U
t
sln. esatta
stabile
Δt1< Δt0
ANALISI DI TRANSITORIO DINAMICO - MID
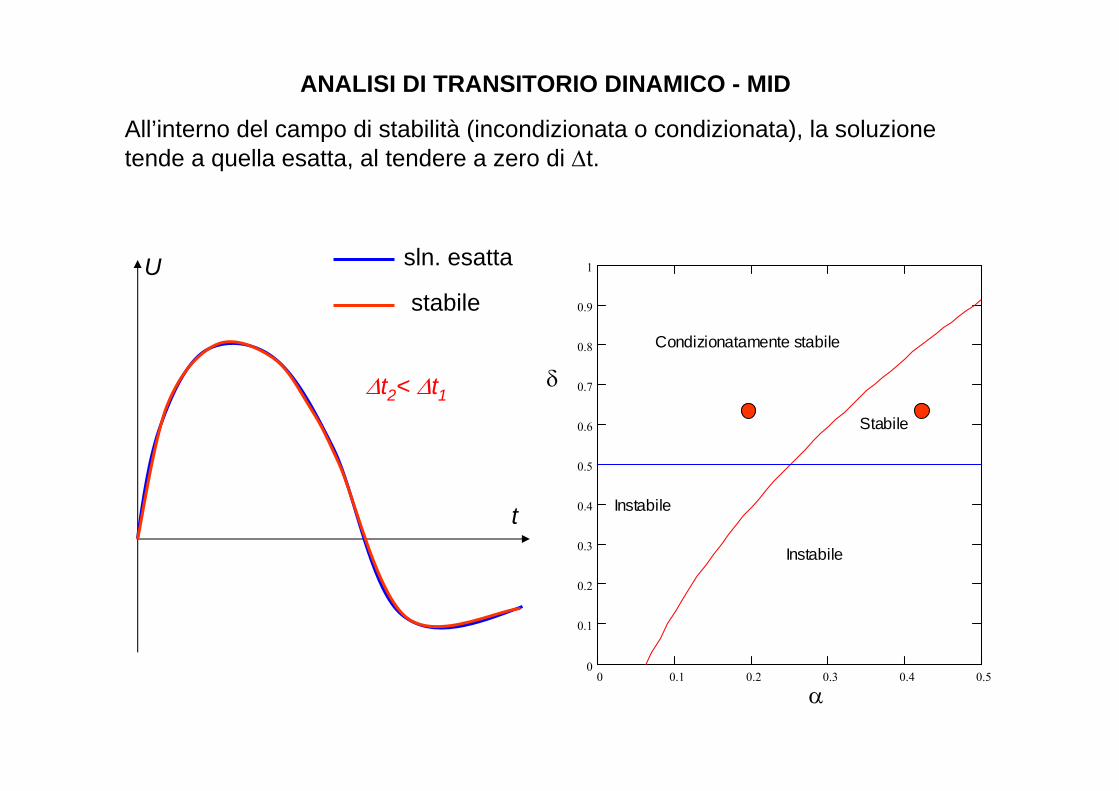
All’interno del campo di stabilità (incondizionata o condizionata), la soluzione tende a quella esatta, al tendere a zero di Δt.
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
U
t
sln. esatta
stabile
Δt2< Δt1
-2.00E-03
-1.50E-03
-1.00E-03
-5.00E-04
0.00E+00
5.00E-04
1.00E-03
1.50E-03
2.00E-03
0.00E+00 5.00E-01 1.00E+00 1.50E+00 2.00E+00 2.50E+00
Tempo [s]
Spos
tam
ento
mez
zeria
[m]
0.2132.66E-024.25E-03
Δt [s]
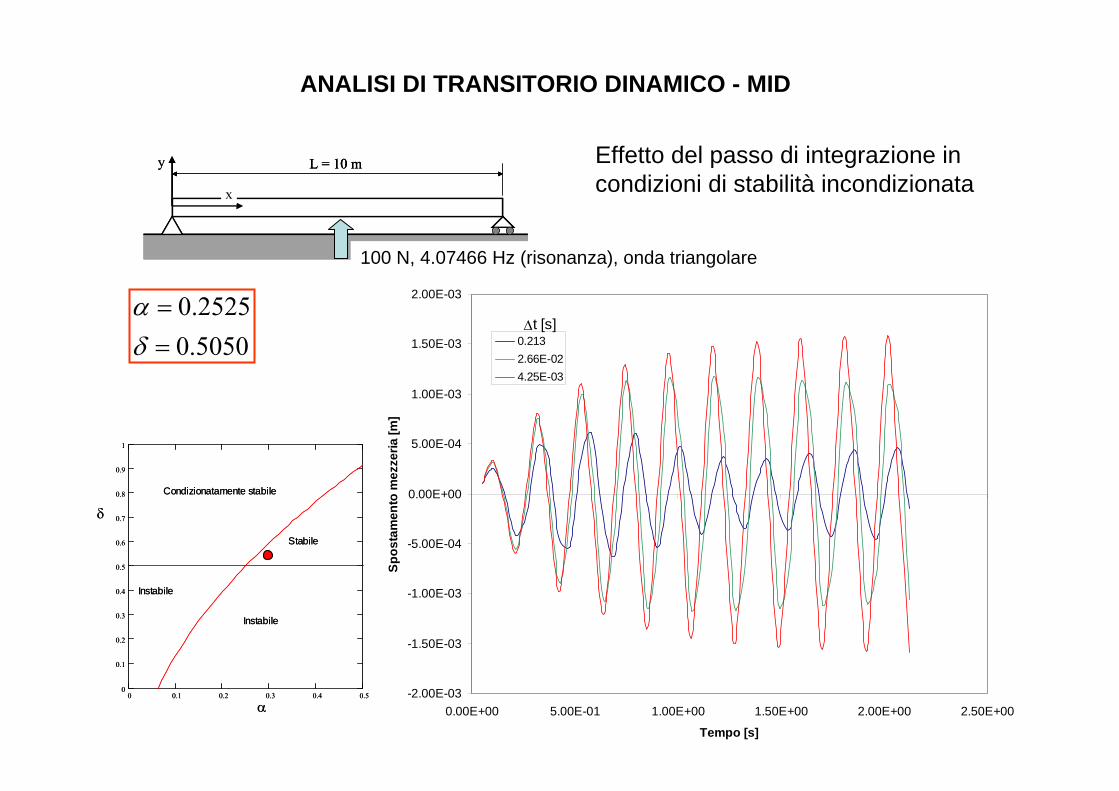
5050.02525.0
==
δα
L = 10 m
x
y L = 10 mL = 10 m
x
y
100 N, 4.07466 Hz (risonanza), onda triangolare
ANALISI DI TRANSITORIO DINAMICO - MID
Effetto del passo di integrazione in condizioni di stabilità incondizionata
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
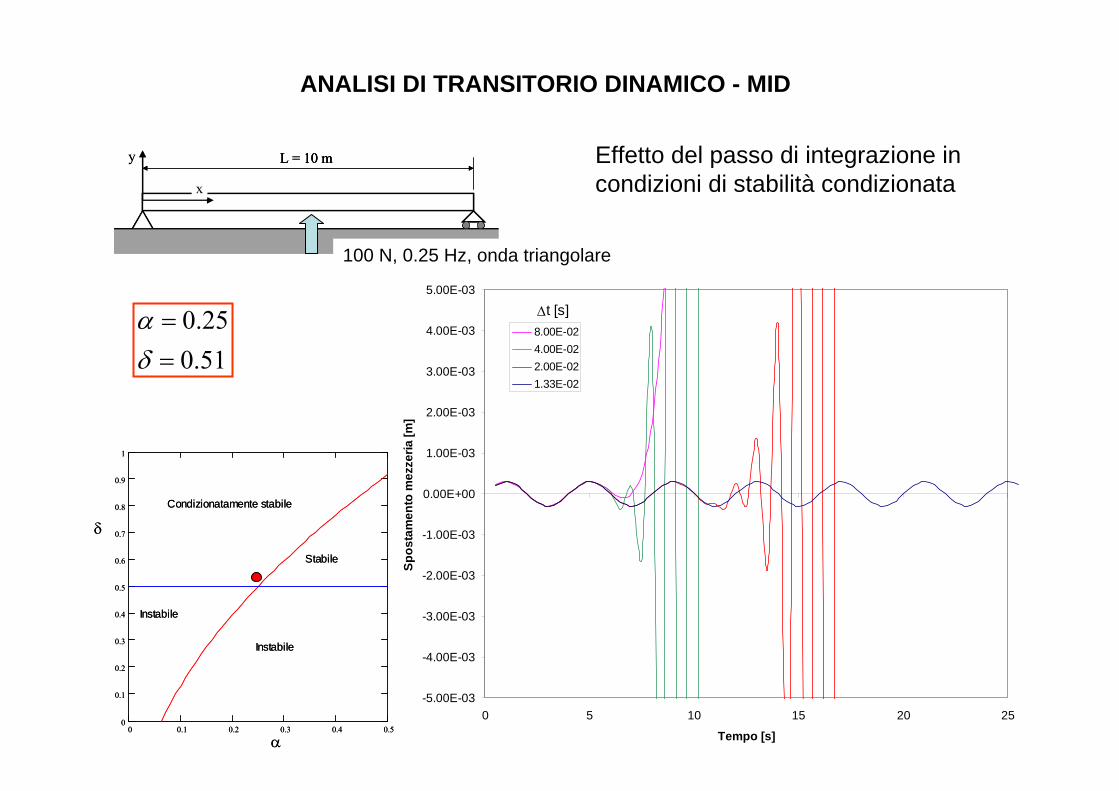
ANALISI DI TRANSITORIO DINAMICO - MID
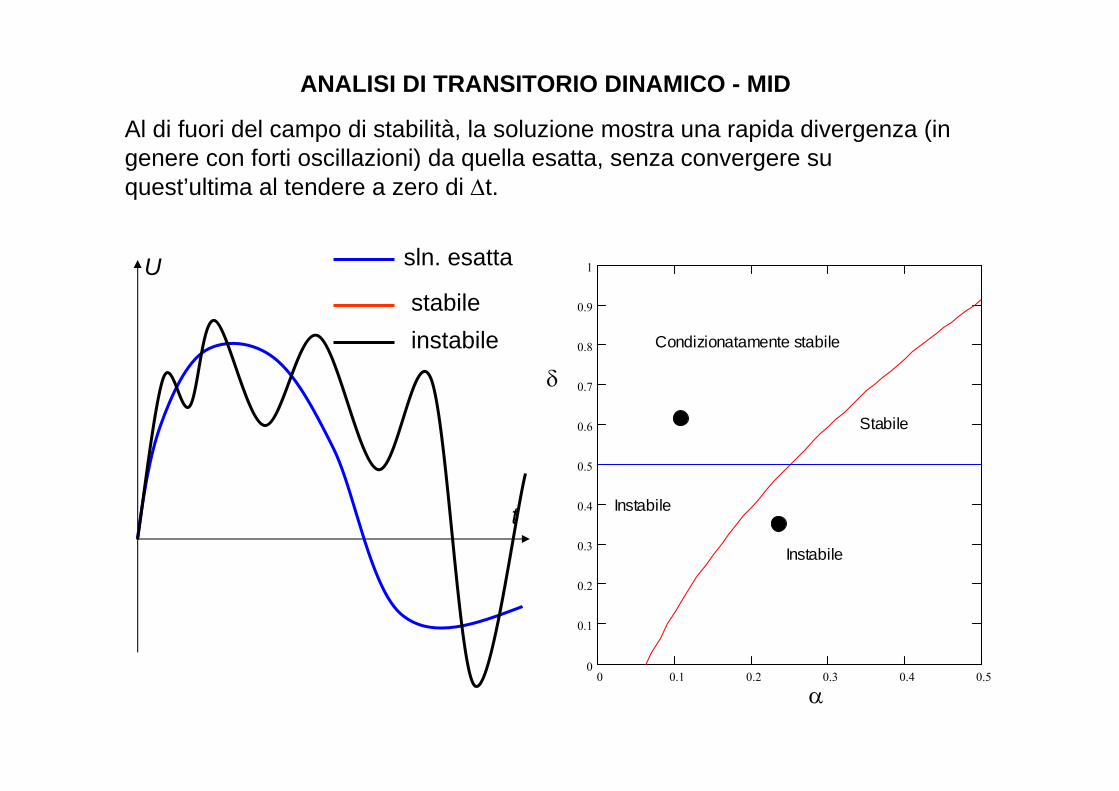
Al di fuori del campo di stabilità, la soluzione mostra una rapida divergenza (in genere con forti oscillazioni) da quella esatta, senza convergere su quest’ultima al tendere a zero di Δt.
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
U
t
sln. esatta
stabileinstabile
-5.00E-03
-4.00E-03
-3.00E-03
-2.00E-03
-1.00E-03
0.00E+00
1.00E-03
2.00E-03
3.00E-03
4.00E-03
5.00E-03
0 5 10 15 20 25
Tempo [s]
Spos
tam
ento
mez
zeria
[m]
8.00E-024.00E-022.00E-021.33E-02
Δt [s]
51.025.0
==
δα
L = 10 m
x
y L = 10 mL = 10 m
x
y
100 N, 0.25 Hz, onda triangolare
ANALISI DI TRANSITORIO DINAMICO - MID
Effetto del passo di integrazione in condizioni di stabilità condizionata
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
δ
α0 0.1 0.2 0.3 0.4 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Condizionatamente stabile
Stabile
Instabile
Instabile
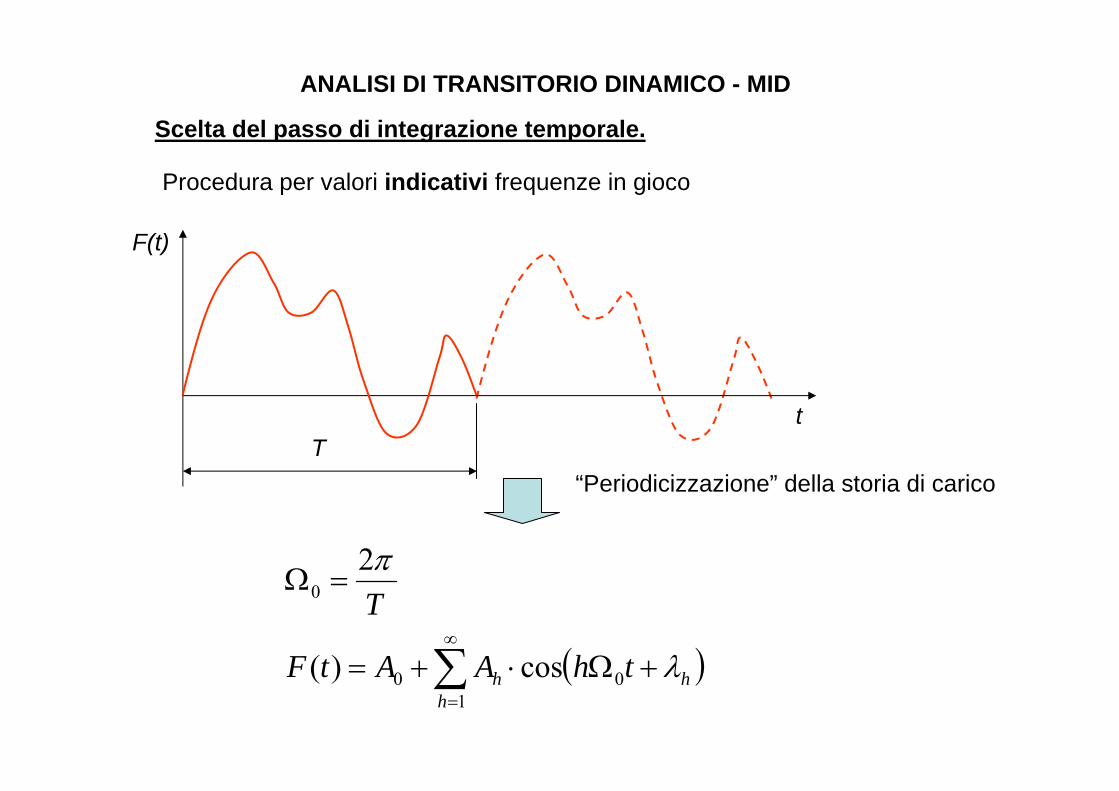
ANALISI DI TRANSITORIO DINAMICO - MID
Scelta del passo di integrazione temporale.
F(t)
tT
Procedura per valori indicativi frequenze in gioco
( )∑∞
=
+Ω⋅+=
=Ω
100
0
cos)(
2
hhh thAAtF
T
λ
π
“Periodicizzazione” della storia di carico
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7 8 9 10
Ordine armonica
Am
piez
za [k
N]
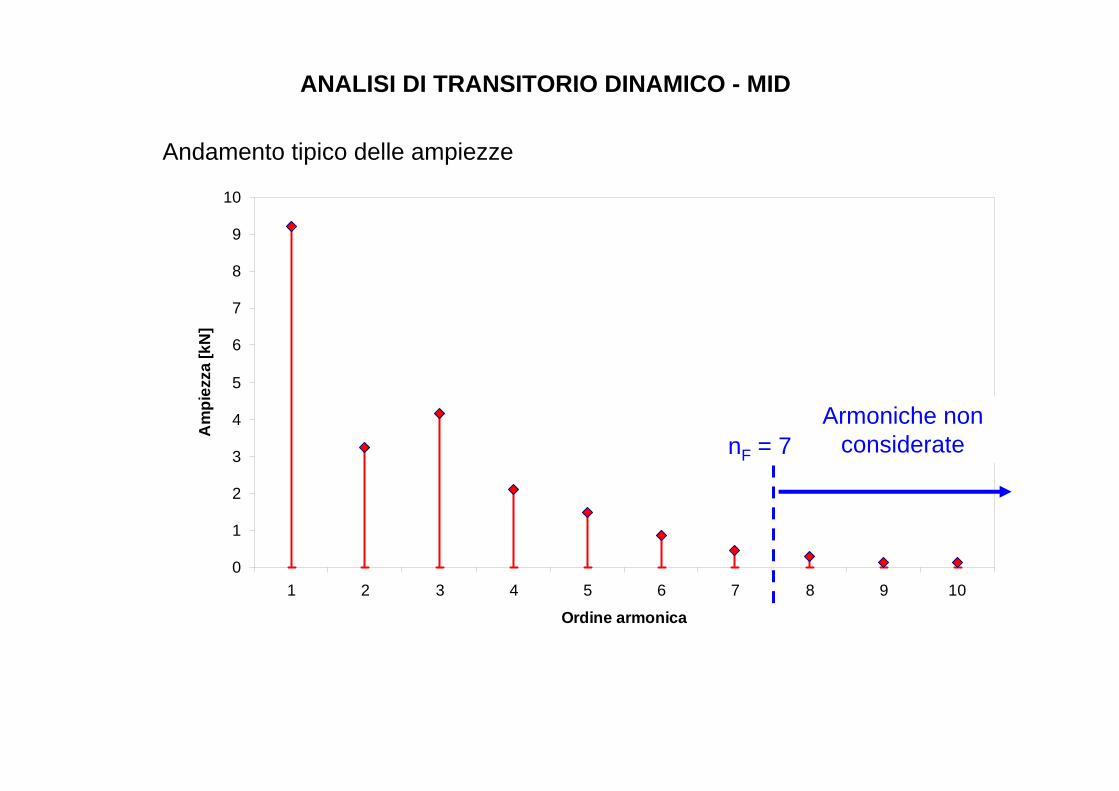
ANALISI DI TRANSITORIO DINAMICO - MID
nF = 7Armoniche non
considerate
Andamento tipico delle ampiezze
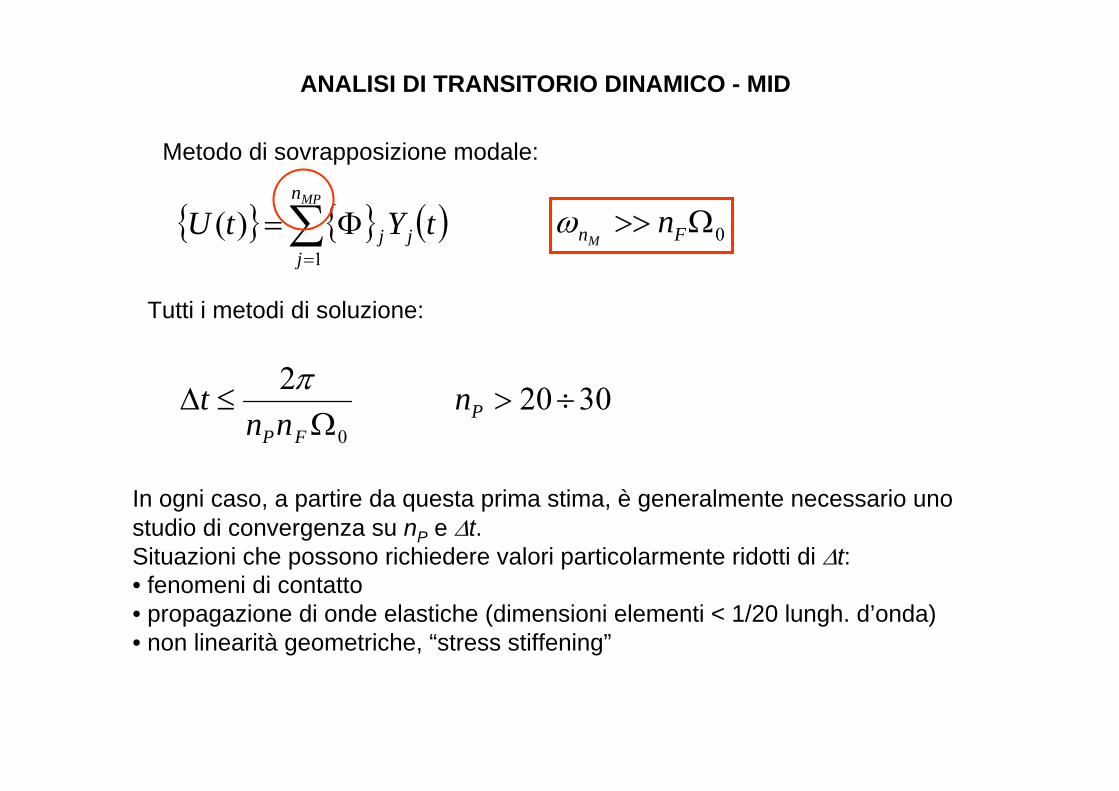
ANALISI DI TRANSITORIO DINAMICO - MID
{ } { } ( )∑=
Φ=MPn
jjj tYtU
1)( 0Ω>> Fn n
Mω
Metodo di sovrapposizione modale:
Tutti i metodi di soluzione:
30202
0
÷>Ω
≤Δ PFP
nnn
t π
In ogni caso, a partire da questa prima stima, è generalmente necessario uno studio di convergenza su nP e Δt.Situazioni che possono richiedere valori particolarmente ridotti di Δt:• fenomeni di contatto• propagazione di onde elastiche (dimensioni elementi < 1/20 lungh. d’onda)• non linearità geometriche, “stress stiffening”
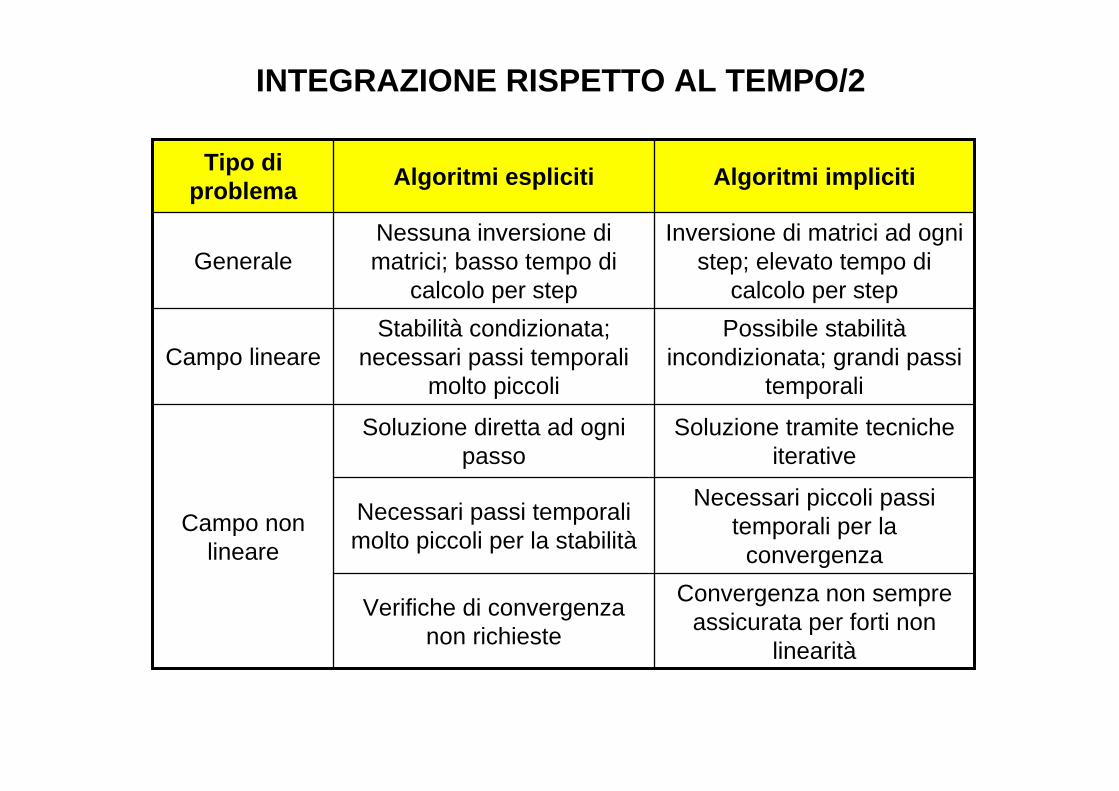
INTEGRAZIONE RISPETTO AL TEMPO/2
Campo non lineare
Campo lineare
Generale
Tipo di problema
Necessari piccoli passi temporali per la
convergenza
Necessari passi temporali molto piccoli per la stabilità
Convergenza non sempre assicurata per forti non
linearità
Verifiche di convergenza non richieste
Soluzione tramite tecniche iterative
Soluzione diretta ad ogni passo
Possibile stabilitàincondizionata; grandi passi
temporali
Stabilità condizionata; necessari passi temporali
molto piccoli
Inversione di matrici ad ogni step; elevato tempo di
calcolo per step
Nessuna inversione di matrici; basso tempo di
calcolo per step
Algoritmi implicitiAlgoritmi espliciti
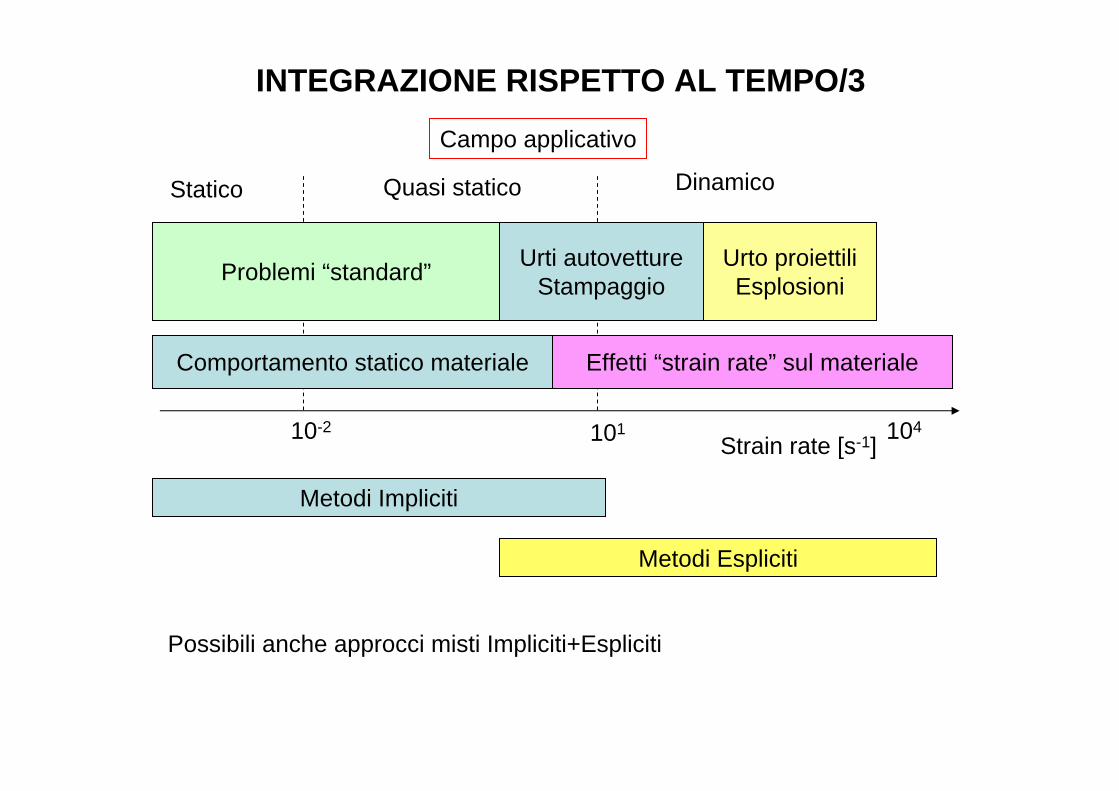
INTEGRAZIONE RISPETTO AL TEMPO/3
Strain rate [s-1]
Statico Quasi statico Dinamico
10110-2 104
Urti autovettureStampaggio
Urto proiettiliEsplosioniProblemi “standard”
Comportamento statico materiale Effetti “strain rate” sul materiale
Metodi Impliciti
Metodi Espliciti
Campo applicativo
Possibili anche approcci misti Impliciti+Espliciti