Analisi agli elementi niti di campi vettoriali · Analisi agli elementi niti di campi vettoriali...
10
Analisi agli elementi finiti di campi vettoriali Carlo Forestiere December 13, 2014 1 Formulazione in forma debole di equazioni di campo vettoriale Sia Ω ⊆ R 2 un dominio bidimensionale (Fig. 1) riempito da un materiale lin- eare, isotropo, tempo invariante, non-dispersivo spazialmente, caratterizzato dalla permittivit` a ε e dalla permeabilit` a magnetica μ 0 . Sia Γ la frontiera di Ω ed n il vettore normale a tale curva nel piano. La curva Γ consiste nell’unione di due curve Γ = Γ D ∪ Γ N . Sia J imp la densit` a di corrente im- pressa all’interno del dominio Ω. Il campo elettromagnetico in (E, H) deve Figure 1: Dominio del problema Ω e relativa frontiera Γ. Γ ` e costituita da due parti: Γ D su cui viene imposta condizione di Dirichlet e Γ N su cui viene imposta una condizione di tipo impedenza. soddisfare le equazioni di Maxwell: ∇× E = -jωμ 0 H, (1a) ∇× H =+jωεE + J imp , (1b) ∇· (E)= - 1 jω ∇· J imp , (1c) μ 0 ∇· H =0. (1d) 1
Transcript of Analisi agli elementi niti di campi vettoriali · Analisi agli elementi niti di campi vettoriali...

Analisi agli elementi finiti di campi vettoriali
Carlo Forestiere
December 13, 2014
1 Formulazione in forma debole di equazioni dicampo vettoriale
Sia Ω ⊆ R2 un dominio bidimensionale (Fig. 1) riempito da un materiale lin-eare, isotropo, tempo invariante, non-dispersivo spazialmente, caratterizzatodalla permittivita ε e dalla permeabilita magnetica µ0. Sia Γ la frontieradi Ω ed n il vettore normale a tale curva nel piano. La curva Γ consistenell’unione di due curve Γ = ΓD ∪ ΓN . Sia Jimp la densita di corrente im-pressa all’interno del dominio Ω. Il campo elettromagnetico in (E,H) deve
Figure 1: Dominio del problema Ω e relativa frontiera Γ. Γ e costituita dadue parti: ΓD su cui viene imposta condizione di Dirichlet e ΓN su cui vieneimposta una condizione di tipo impedenza.
soddisfare le equazioni di Maxwell:
∇×E = −jωµ0H, (1a)
∇×H = +jωεE + Jimp, (1b)
∇ · (εE) = − 1
jω∇ · Jimp, (1c)
µ0∇ ·H = 0. (1d)
1

e le condizioni al contorno:
n×E = P su ,ΓD (2a)
−µ−10 n×∇×E + γn× n×E = Q su ΓN . (2b)
Combinando l’equazioni di Maxwell ai rotori, i.e. 1a e 1b, si ottiene l’eq diHelmoltz:
∇×∇×E− µ0εω2E = −jµ0ωJimp. (3)
1.1 Formulazione debole
Al fine di determinare la formulazione debole del problema, moltiplichiamol’eq. 3 per una funzione di test Wi ed integriamo sul dominio Ω.∫∫
ΩWi·∇×∇×E dS−ω2µ0
∫∫ΩεWi·E dS = −jµ0ω
∫∫ΩWi·Jimp dS (4)
Sfruttando l’identita vettoriale
∇ · (Wi ×∇×E) = ∇×Wi · ∇ ×E−Wi · ∇ ×∇×E (5)
ed il teorema di Gauss si ottiene:∫∫Ω∇×Wi · ∇ ×E dS − ω2µ0
∫∫ΩεWi ·E dS =
− jµ0ω
∫∫ΩWi · Jimp dS +
∫ΓD∪ΓN
Wi ×∇×E · n dl (6)
usando le condizioni al contorno 2 si perviene alla formulazione in formadebole del problema:∫∫
Ω∇×Wi ·∇×E dS−ω2µ0
∫∫ΩεWi ·E dS = −jµ0ω
∫∫ΩWi ·Jimp dS+∫
ΓD
n×Wi · ∇ ×E + µ0
∫ΓN
Q ·Widl + µ0γ
∫ΓN
(n×Wi) · (n×E) dl
(7)
Edge Elements
1.2 Richiami funzioni a tenda
Con riferimento alla Fig. 2, sia ϕ(e)i la restrizione della funzione nodale as-
sociata al nodo i e ristretta all’ elemento T (e). Essa e definita delle seguentiproprieta
• ϕ(e)i lineare in T (e),
2

Figure 2: Numerazione locale dei nodi (in blue) e dei lati (rosso)dell’elemento triangolare T (e). L’orientazione scelta dei lati e riportata confrecce.
• ϕ(e)i = δij j ∈ 1, 2, 3 , j 6= i.
Di conseguenza risulta che ϕ(e)1 + ϕ
(e)2 + ϕ
(e)3 = 1. La funzione di base ϕ
(e)i
puo’ essere espressa in termini geometrici nel modo seguente: 1
ϕ(e)i =
Ai(e)
A(e)tot
∀i ∈ 1, 2, 3 , (8)
dove
A(e)1 =
1
2
(r
(e)3 − r
(e)2
)×(r(e) − r
(e)2
)· z, (9a)
A(e)2 =
1
2
(r
(e)1 − r
(e)3
)×(r(e) − r
(e)3
)· z, (9b)
A(e)3 =
1
2
(r
(e)2 − r
(e)1
)×(r(e) − r
(e)1
)· z, (9c)
Atot =1
2
(r
(e)2 − r
(e)1
)×(r
(e)3 − r
(e)1
)· z. (9d)
In Fig. 3 riportiamo una rappresentazioni delle tre funzioni ϕ(e)1 , ϕ
(e)2 , ϕ
(e)3
E’ immediato scrivere il gradiente della restrizione delle funzioni nodali:
∇ϕ(e)1 =
1
2Atotz×
(r
(e)3 − r
(e)2
)=
h1
h1, (10a)
∇ϕ(e)2 =
1
2Atotz×
(r
(e)1 − r
(e)3
)=
h2
h2, (10b)
∇ϕ(e)3 =
1
2Atotz×
(r
(e)2 − r
(e)1
)=
h3
h3. (10c)
Il gradiente ∇ϕ(e)i gode delle seguenti proprieta
1Si noti che si e assunta un orientazione antioraria dei nodi del triangolo. Nel caso diorientazione oraria dei nodi del triangolo ciascuna delle Eq. 9 cambiera’ segno ma il lororapporto dato dall’Eq. 8 restera’ inalterato.
3
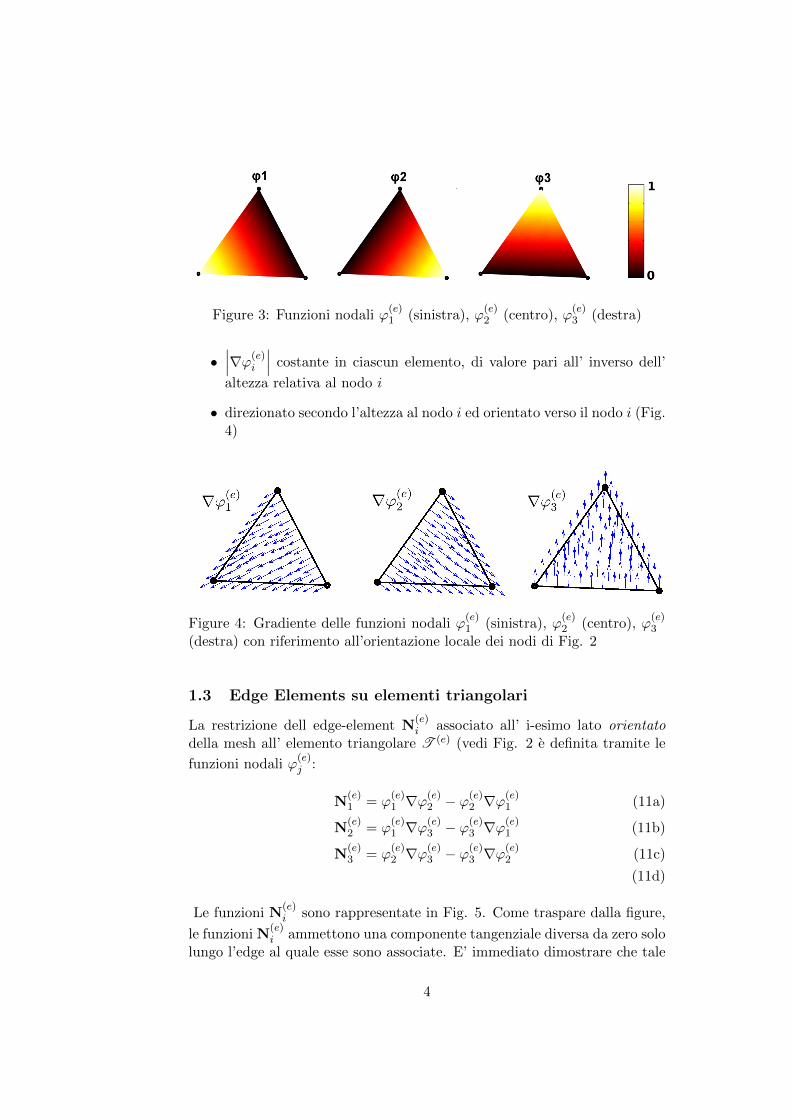
Figure 3: Funzioni nodali ϕ(e)1 (sinistra), ϕ
(e)2 (centro), ϕ
(e)3 (destra)
•∣∣∣∇ϕ(e)
i
∣∣∣ costante in ciascun elemento, di valore pari all’ inverso dell’
altezza relativa al nodo i
• direzionato secondo l’altezza al nodo i ed orientato verso il nodo i (Fig.4)
Figure 4: Gradiente delle funzioni nodali ϕ(e)1 (sinistra), ϕ
(e)2 (centro), ϕ
(e)3
(destra) con riferimento all’orientazione locale dei nodi di Fig. 2
1.3 Edge Elements su elementi triangolari
La restrizione dell edge-element N(e)i associato all’ i-esimo lato orientato
della mesh all’ elemento triangolare T (e) (vedi Fig. 2 e definita tramite le
funzioni nodali ϕ(e)j :
N(e)1 = ϕ
(e)1 ∇ϕ
(e)2 − ϕ
(e)2 ∇ϕ
(e)1 (11a)
N(e)2 = ϕ
(e)1 ∇ϕ
(e)3 − ϕ
(e)3 ∇ϕ
(e)1 (11b)
N(e)3 = ϕ
(e)2 ∇ϕ
(e)3 − ϕ
(e)3 ∇ϕ
(e)2 (11c)
(11d)
Le funzioni N(e)i sono rappresentate in Fig. 5. Come traspare dalla figure,
le funzioni N(e)i ammettono una componente tangenziale diversa da zero solo
lungo l’edge al quale esse sono associate. E’ immediato dimostrare che tale
4

Figure 5: Restrizione degli edge Elements relativi al triangolo T (e)
componente tangente e’ di valore pari al reciproco della lunghezza del latocorrispondente. Inoltre, la funzione di base globale Ni e’ diversa da zerosolo sui triangoli che condividono il lato i. Inoltre sul lato condiviso tra duetriangoli adiacenti tale componente tangente e continua.
Poiche abbiamo che ϕ(e)1 + ϕ
(e)2 + ϕ
(e)3 = 1 gli edge elements possono
essere scritti solo in funzione di φ2 e φ3 ovvero: N(e)1
N(e)2
N(e)3
=
N12 N13
N22 N23
N32 N33
( ∇ϕ(e)2
∇ϕ(e)3
), (12)
con N12 N13
N22 N23
N32 N33
=
1− ϕ(e)3 ϕ
(e)2
ϕ(e)3 1− ϕ(e)
2
−ϕ(e)3 ϕ
(e)2
(13)
1.4 Metodo di Galerkin
Si consideri l’insieme dei lati della mesh che o sono interni al dominio Ω ocadono su ΓN , e si indichi con Nj la generica funzione di base associata al j-esimo elemento di questo insieme e sia ne la dimensione di quest’insieme. Siconsideri poi l’insieme dei lati che cadono su ΓD (lungo i quali la componente
tangente di E e nota) e si indichi con N(D)h la generica funzione di base
associata al h-esimo elemento di questo insieme e sia nD la dimensione a diquest’insieme.
Allora il campo elettrico sul dominio Ω puo’ dunque essere espresso intermini delle funzioni di base:
E =
ne∑j=1
xjNj +
nD∑h=1
x(D)h N
(D)h , (14)
dove x(D)h sono coefficienti noti per la condizione al contorno 2a. Seguendo
il metodo di Galerkin scegliamo le funzioni peso Wj = Nj e sostituendo
5

l’espansione 14 in 7 si ottiene il sistema lineare di ne equazioni in ne incog-nite:
Ax = b, (15)
dove si ha ∀i, j ∈ 1, . . . , ne,
Aij =
∫∫Ω∇×Ni·∇×Nj dS−ω2µ0
∫∫ΩεNi·Nj dS−µ0γ
∫ΓN
(n×Ni)·(n×Nj) dl,
(16)
bi = −jµ0ω
∫∫ΩNi · Jimp dS + µ0
∫ΓN
Ni ·Qdl+
nD∑h=1
x(D)h
∫∫Ω∇×Ni · ∇ ×N
(D)h dS − ω2µ0
nD∑h=1
x(D)h
∫∫ΩεNi ·N(D)
h dS.
(17)
Si noti che l’integrale su ΓD nell’eq. 7 e nullo, poiche n ×Nj = 0 su ΓD
∀j ∈ 1, . . . , ne.
1.5 Autovalori ed autovettori in una cavita
Consideriamo il problema agli autovalori, che si ottiene a partire dalle equazioni1 - 2, assumendo ε = ε0 in Ω, Q = 0, γ = 0, Γ = ΓN , cioe:
∇×∇×E = k2E,
n×∇×E = 0 on Γ.(18)
Il problema discretizzato diviene dunque:
Sx = k2Mx, (19)
dove le matrici di stiffness S e di massa M sono definita come segue:
Sij =
∫∫Ω∇×Ni · ∇ ×Nj dS, (20)
Mij =
∫∫ΩNi ·Nj dS. (21)
Il calcolo delle matrici si stiffness e di massa puo essere effettuato localmentesu ciascun elemento a patto di preservare la stessa orientazione dei lati suscala globale e locale.
6
Calcolo degli elementi della matrice di massa
Consideriamo il calcolo della matrice di massa locale relativa all’elementotriangolare T (e). Con riferimento alla Fig. 2 la generica occorrenza M
(e)ij
della matrice di massa locale M(e) si ottiene considerando l’interazione tral’ edge element N
(e)i associato al lato i e l’edge element N
(e)j associato al
lato j, ∀i, j ∈ 1, 2, 3, i.e.:
M(e)ij =
∫∫T (e)
N(e)i ·N
(e)j dS. (22)
Usando le Eq. 12 nella Eq. 22 si ha:
M(e)ij =
3∑h=2
3∑k=2
∇ϕ(e)h · ∇ϕ
(e)k
∫∫T (e)
Nih (x, y)Njk (x, y) dxdy. (23)
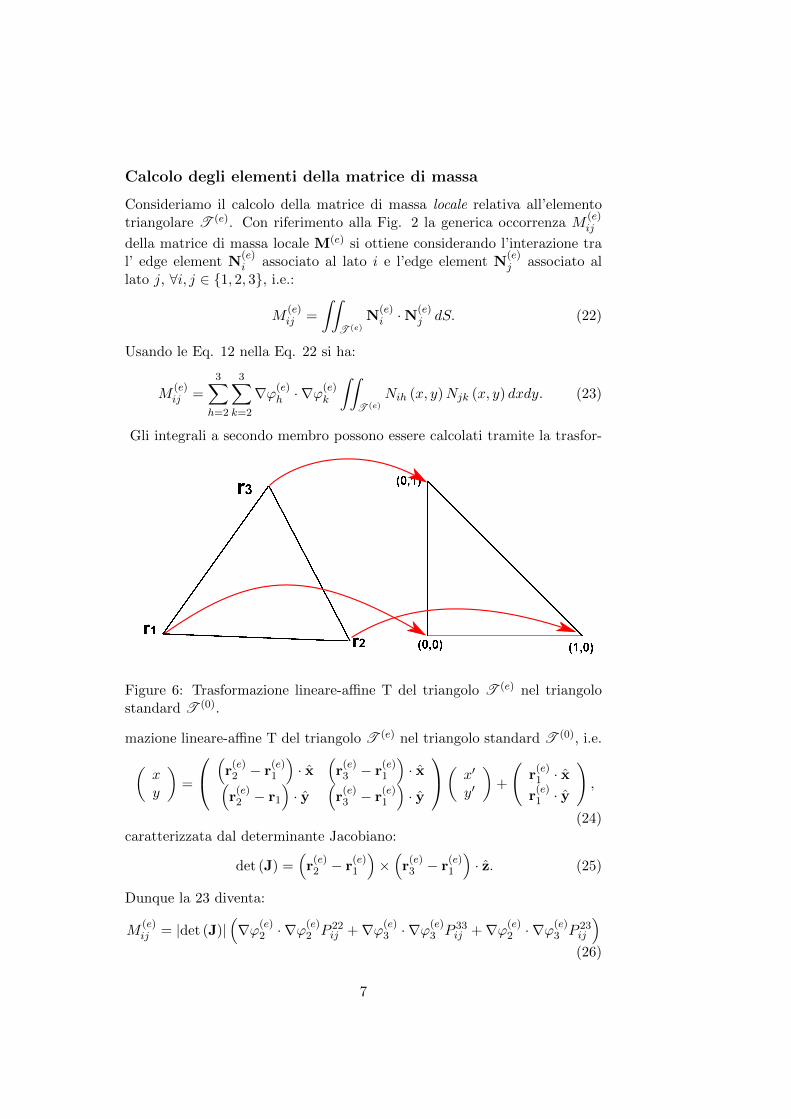
Gli integrali a secondo membro possono essere calcolati tramite la trasfor-
Figure 6: Trasformazione lineare-affine T del triangolo T (e) nel triangolostandard T (0).
mazione lineare-affine T del triangolo T (e) nel triangolo standard T (0), i.e.(xy
)=
(r
(e)2 − r
(e)1
)· x
(r
(e)3 − r
(e)1
)· x(
r(e)2 − r1
)· y
(r
(e)3 − r
(e)1
)· y
( x′
y′
)+
(r
(e)1 · xr
(e)1 · y
),
(24)caratterizzata dal determinante Jacobiano:
det (J) =(r
(e)2 − r
(e)1
)×(r
(e)3 − r
(e)1
)· z. (25)
Dunque la 23 diventa:
M(e)ij = |det (J)|
(∇ϕ(e)
2 · ∇ϕ(e)2 P 22
ij +∇ϕ(e)3 · ∇ϕ
(e)3 P 33
ij +∇ϕ(e)2 · ∇ϕ
(e)3 P 23
ij
)(26)
7

dove:
P hhij =
∫ 1
0
∫ 1−x′
0Nih
(x′, y′
)Njh
(x′, y′
)dy′dx′ ∀h ∈ 2, 3 , (27a)
P 23ij =
∫ 1
0
∫ 1−x′
0
(Ni2
(x′, y′
)Nj3
(x′, y′
)+Nj2
(x′, y′
)Ni3
(x′, y′
))dy′dx′.
(27b)
Procediamo, a titolo di esempio al calcolo di P 22ij . Ricordiamo che nel sistema
di riferimento (x′, y′) le funzioni nodali assumono la forma:
ϕ(e)2
(x′, y′
)= x′, (28a)
ϕ(e)3
(x′, y′
)= y′. (28b)
Usando la definizione delle funzioni Nih e Njh data in Eq. 13 e l’espressionedelle funzioni nodali data in Eq. 28 , la Eq. 27a per h = 2 diventa:
P 2211 =
∫ 1
0
∫ 1−x′
0
(1− y′
)2dy′dx′ =
3
12, (29a)
P 2212 =
∫ 1
0
∫ 1−x′
0y′(1− y′
)dy′dx′ =
1
12, (29b)
P 2222 =
∫ 1
0
∫ 1−x′
0y′2dy′dx′ =
1
12, (29c)
P 2232 =
∫ 1
0
∫ 1−x′
0−y′2dy′dx′ = − 1
12, (29d)
P 2213 =
∫ 1
0
∫ 1−x′
0−y′
(1− y′
)dy′dx′ = − 1
12, (29e)
P 2233 =
∫ 1
0
∫ 1−x′
0y′2dy′dx′ =
1
12; (29f)
ovvero, in forma compatta:
P22 =1
12
3 1 −1+1 1 −1−1 −1 1
. (30)
Analogamente si ottiene:
P33 =1
12
+1 +1 +1+1 +3 +1+1 +1 +1
, P23 =1
12
+3 +3 +1+3 +3 −1+1 −1 −1
. (31)
8

Calcolo degli elementi della matrice di stiffness
Consideriamo il calcolo della matrice di stiffness locale relativa all’elementotriangolare T (e). Con riferimento alla Fig. 2 la generica occorrenza S
(e)ij
della matrice di stiffness locale S(e) si ottiene considerando l’interazione tral’ edge element N
(e)i associato al lato i e l’edge element N
(e)j associato al
lato j, ∀i, j ∈ 1, 2, 3, i.e.:
S(e)ij =
∫∫T (e)
∇×N(e)i · ∇ ×N
(e)j dS. (32)
Usando le Eq. 12, e il fatto che ∇×∇ (·) = 0, l’Eq. 32 diventa:
∇×N(e)i = ∇×
[Ni2∇ϕ(e)
2 +Ni3∇ϕ(e)3
]=[∇Ni2 ×∇ϕ(e)
2 +∇Ni3 ×∇ϕ(e)3
],
(33)per la regola di derivazione delle funzioni composte si ha:
∇Ni2(ϕ2 (x, y) , ϕ3 (x, y)) =[∇ϕ2,ϕ3Ni2 ·
(∂ϕ2
∂x,∂ϕ3
∂x
),∇ϕ2,ϕ3Ni2 ·
(∂ϕ2
∂y,∂ϕ3
∂y
)]=∂Ni2
∂ϕ(e)3
∇ϕ(e)3 , (34)
ed analogamente si ottiene
∇Ni3(ϕ2 (x, y) , ϕ3 (x, y)) =∂Ni3
∂ϕ(e)3
∇ϕ(e)2 . (35)
Sostituendo le Eqs. 34-35 nella 33 si ha:
∇×N(e)i =
∂Ni2
∂ϕ(e)3
∇ϕ(e)3 ×∇ϕ
(e)2 +
∂Ni3
∂ϕ(e)2
∇ϕ(e)2 ×∇ϕ
(e)3 =
z
detJ
(∂Ni2
∂ϕ(e)3
− ∂Ni3
∂ϕ(e)2
),
(36)dove abbiamo usato il fatto che:
∇ϕ(e)3 ×∇ϕ
(e)2 =
1
4A2tot
(r
(e)2 − r
(e)1
)×(r
(e)3 − r
(e)1
)=
z
detJ. (37)
La matrice di Stiffness in Eq. 32 diventa dunque
S(e)ij =
∫∫T (e)
∇×N(e)i · ∇ ×N
(e)j dS =
1(detJ(e)
)2 ∫∫T (e)
(∂Ni2
∂ϕ(e)3
− ∂Ni3
∂ϕ(e)2
)(∂Nj2
∂ϕ(e)3
− ∂Nj3
∂ϕ(e)2
)dxdy =
Rij∣∣detJ(e)∣∣ , (38)
9

dove:
Rij =1
2
(∂Ni2
∂ϕ(e)3
− ∂Ni3
∂ϕ(e)2
)(∂Nj2
∂ϕ(e)3
− ∂Nj3
∂ϕ(e)2
), (39)
R =
+2 −2 +2−2 +2 −2+2 −2 +2
(40)
References
[1] Jian-Ming Jin, Theory and Computation of Electromagnetic Fields,Wiley-IEEE Press (2010)
[2] Anders Bondeson, Thomas Rylander, Par Ingelstrom ComputationalElectromagnetics, Springer (2005).
[3] Partial Differential Equation Toolbox Manual
[4] G. Miano, Note di Modelli Numerici per i Campi
10


















