Amplitude Theparticle ...mmurkovi/phys/lecture_notes_17...Maximum acceleration, amax = !2A when x =...
13
Amplitude The particle’s maximum displacement from the equilibrium position x =0 (recall figure 4); • the amplitude corresponds to a maximum displacement x = ±A. • the displacement of the motion is confined to -A ≥ x ≤ +A. Velocity Let us neglect φ 0 , so the displacement x(t) is, from (1.6), x (t)= A sin (ωt) , (1.7) which is the displacement-time graph shown in, for example, figure 3. The particle’s velocity can be obtained via v x = dx/dt; using (1.6) (where φ 0 is a constant), v x = dx dt = Aω cos (ωt) . (1.8) Turning points: what are the turning points of the motion? From figure 6, we see that v x (t) is • Maximum when t =0, 2π ω , 4π ω , 6π ω ··· . • Minimum when t = π ω , 3π ω , 5π ω , 7π ω , ··· . i.e. the speed, v max is a maximum when dv x /dt = 0, i.e. dv x dt = -Aω 2 sin (ωt)=0 , (1.9) i.e. when 7
Transcript of Amplitude Theparticle ...mmurkovi/phys/lecture_notes_17...Maximum acceleration, amax = !2A when x =...

Amplitude
The particle’s maximum displacement from the equilibrium position
x = 0 (recall figure 4);
• the amplitude corresponds to a maximum displacement x = ±A.
• the displacement of the motion is confined to −A ≥ x ≤ +A.
Velocity
Let us neglect φ0, so the displacement x(t) is, from (1.6),
x (t) = A sin (ωt) , (1.7)
which is the displacement-time graph shown in, for example, figure 3.
The particle’s velocity can be obtained via vx = dx/dt; using (1.6) (where φ0
is a constant),
vx =dx
dt= Aω cos (ωt) . (1.8)
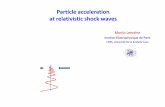
Turning points: what are the turning points of the motion? From figure 6,
we see that vx(t) is
• Maximum when t = 0, 2πω
, 4πω
, 6πω· · · .
• Minimum when t = πω, 3π
ω, 5π
ω, 7π
ω, · · · .
i.e. the speed, vmax is a maximum when dvx/dt = 0, i.e.
dvx
dt= −Aω2 sin (ωt) = 0 , (1.9)
i.e. when
7

+A
0
-A7π/ω6π/ω5π/ω4π/ω3π/ω2π/ωπ/ω0
vx(t
)
t
Figure 6: Velocity-time graph.
t = 0,2π
ω,4π
ω,6π
ω, · · · , (1.10)
or
t =nπ
ωwhen n = 0, 2, 4, 6, · · · . (1.11)
So using (1.10), we see that
vmax = ωA cos (nπ) = ωA . (1.12)
Acceleration
Again neglecting φ0, the particle’s acceleration ax can be obtained via ax =
dvx/dt. From (1.8) or (1.9), we find that
ax = −Aω2 sin (ωt) , (1.13)
or using (1.7),
8

ax = −ω2x (t) . (1.14)
i.e. ax is proportional to the negative of the displacement. A similar calculation
to the turning-point calculation discussed above shows that
• Maximum acceleration, amax = ω2A when x = −A.
• Minimum acceleration, amin = −ω2A when x = +A.
Recalling x(t) in (1.7), we see that the period must correspond to an increase
of 2π in the argument of the sine function:
A sin (ωt + 2π) = A sin (ω (t + T )) , (1.15)
i.e.
ωt + 2π = ω (t + T ) , (1.16)
or
ωt + 2π = ωt + ωT , (1.17)
from which it is easy to show that the angular velocity, or in this case the
angular frequency, ω, is
T =2π
ω, (1.18)
which you should recognise from circular motion. Furthermore, from (1.1), we
find
T =1
ν=
2π
ω−→ ω = 2πν . (1.19)
So the situation at any time t is completely specified if both x(t) and dx/dt
are known at that instant.
9

1.2.3 Rotating Vector Representation
A quantity which varies sinusoidally with respect to another physical quantity
can be represented as the projection of a rotating vector on the diameter of
a circle.
Consider figure 7, where a point P moves counter-clockwise around a circle of
radius r with angular frequency ω.
Consider the position vector OP and its projection on the y-axis at times t0,
t1 and t2, where t0 < t1 < t2.
We see that as the particle moves around the circle, the y-component of OP
oscillates, forming a sine function with time. The instantaneous position of
P is then defined by the constant length A and variable angle θ, and y(t) is
given by
y (t) = r cos (ωt) . (1.20)
In this way, we have linked wave motion to circular motion.
Suppose that instead of vector OP being initially along the x-axis, it is at
an angle φ0, as in figure 8. We may repeat the above process to obtain the
sinusoidal oscillation shown.
In this second example, however, we see that the more general expression
for the displacement corresponding to (1.20) is now
y (t) = r cos (ωt + φ0) . (1.21)
This angle φ0 is the phase constant:
• At t0 = 0: displacement is y(t) = r cos φ0 .
• At later times t > t0: the phase is φ = ωt + φ0, and displacement is
y(t) = r cos(ωt + φ0).
10

Figure 7: Rotating vector representation.
11

Figure 8: Rotating vector representation.
12

Thus, the general form of the kinematical equations for oscillatory motion are
thus
y (t) = A sin (ωt + φ0) , (1.22)
v (t) = ωA cos (ωt + φ0) = vmax cos (ωt + φ0) . (1.23)
So different values of φ0 correspond to different starting positions on the circle.
Note: consider an arbitrary phase constant φ0. Suppose that we rewrite φ0
as
φ0 =π
2+ φ′
0 , (1.24)
i.e. in terms of a different phase constant φ′
0. We can then write
sin (ωt + φ0) = sin(
ωt +(π
2+ φ′
0
))
. (1.25)
From the trigonometric identities
sin(A + B) = sin(A) cos(B) + sin(B) cos(A)
cos(A + B) = cos(A) cos(B) − sin(A) sin(B)
it is straightforward to show that
x (t) = A sin (ωt + φ0) = A cos (ωt + φ′
0) , (1.26)
where we emphasise that the phase constants φ0 and φ′
o are different.
Therefore, in general, we can write the kinematical equations of SHM equiv-
alently in terms of sine or cosine functions:
x (t) = A sin (ωt + φ0) , v (t) = ωA cos (ωt + φ0) , (1.27)
x (t) = A cos (ωt + φ′
0) , v (t) = −ωA sin (ωt + φ′
0) . (1.28)
13

Suppose we have a particle oscillating with SHM along the x-axis; we may set
up a rotating-vector representation as in figure 9 – i.e. a circle with radius r
– in which the projection upon the x-axis represents the SHM of our particle.
However, we can also consider the accompanying projection upon the y-axis,
perpendicular to the x-axis.
Figure 9: Rotating vector.
• The real motion of the particle is along the x-axis;
x (t) = A cos (ωt + φ0) . (1.29)
• This alternative ”motion” along the y-axis can be thought of as the
particle’s imaginary motion.
14

y (t) = A sin (ωt + φ0) . (1.30)
So even though this ”motion” in the y-direction does not really exist phys-
ically, we can consider it mathematically, and consider the motion of the
particle in a two-dimensional complex plane.
In figure 9, the position of point P at any time can be expressed as
z = x1 + iy1 . (1.31)
Switching from the Cartesian (x, y) to polar (r, φ) co-ordinate systems, if
x1 = r cos φ , y1 = r sin φ , (1.32)
then in (1.31),
z = r (cos φ + i sin φ) . (1.33)
From complex analysis, by introducing the Euler relationship
cos φ + i sin φ = exp (iφ) , (1.34)
then (1.33) can be written in the complex exponential form
z = r exp (iφ) . (1.35)
The use of (1.35) greatly simplifies the mathematics of oscillatory motion:
indeed, for a particle undergoing SHM, if
real motion : x (t) = A cos (ωt + φ0) , (1.36)
vx (t) = −ωA sin (ωt + φ0) , (1.37)
15

imaginary motion : y (t) = A sin (ωt + φ0) , (1.38)
vy (t) = ωA cos (ωt + φ0) . (1.39)
then we can summarise the kinematical relationships discussed previously as
displacement : z (t) = A exp [i (ωt + φ0)] . (1.40)
velocity :dz
dt= iωA exp [i (ωt + φ0)] = iωz (t) . (1.41)
acceleration :d2z
dt2= i2ω2A exp [i (ωt + φ0)] = −ω2z (t) . (1.42)
These expressions are useful mathematically when we come to find the resul-
tant of two or more harmonic oscillations (see later).
1.3 Energy in Simple Harmonic Motion
Recall our example of an isolated mass-spring system (figure 10 5):
• Choose co-ordinate system in which equilibrium position is x0 = 0, so
displacement is ∆x = x.
• Mass m, spring constant k.
• Elastic potential energy is (from classical mechanics)
Us =1
2kx2 . (1.43)
• Mechanical energy, EM is then
EM = K + Us =1
2mv2
x +1
2kx2 . (1.44)
5Knight, Figure 14.10, page 422
16

� �
Figure 10: Mass-spring system.
17

Consider the energy-time diagram in figure 10:
• Us = (1/2)kx2 – potential-energy curve is a parabola.
• System is isolated – i.e. EM is conserved – so line E = EM is of constant
energy.
• Particle constrained between −A ≤ x ≤ +A.
• At x = ±A (turning points): energy is purely potential (K = 0);
EM (x = ±A) = Us =1
2kA2 . (1.45)
• At x = 0 (equilibrium position): energy is purely kinetic (Us = 0);
EM (x = 0) = K =1
2v2
max . (1.46)
Since the system is isolated, EM is conserved, i.e. ∆EM = 0, and so from
(1.45) and (1.46),
1
2mv2
max =1
2kA2 , (1.47)
i.e.
vmax =
√
k
mA . (1.48)
However, we also recall that the maximum speed in SHM is simply
vmax = ωA , (1.49)
from which we find the expression for the angular velocity/frequency ω
ω =
√
k
m(1.50)
introduced previously. Similarly, we can easily find the relationships
18

ν =1
2π
√
k
m, T = 2π
√
m
k. (1.51)
Note: we find from (1.51) that T and ν do not depend upon the amplitude
A – so small and large oscillations can have the same period.
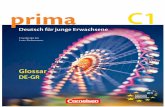
Figure 11 6 shows graphically how K and Us vary with time:
Figure 11: Energy-time graph.
• Both K and Us oscillate with time.
• Both remain positive, since vx and x are squared.
• It is seen that energy is continuously transferred between kinetic and
potential energy, but their sum EM remains constant.
6Knight, Figure 14.11, page 423
19