Algorithms for Graph Visualization
21
Steven Chaplick · Lehrstuhl f¨ ur Informatik I · Universit¨ at W¨ urzburg (based on slides from Martin N¨ ollenburg and Robert G¨ orke, KIT) Lecture #2 Summer Semester 2019 Algorithms for Graph Visualization Two Heuristics: Force-Directed Method & Multi-dimensional Scaling Refs: [GD: AVG, Ch. 10] and [DG: M&M, Ch. 4]
Transcript of Algorithms for Graph Visualization

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
(based on slides from Martin Nollenburg and Robert Gorke, KIT)
Lecture #2
Summer Semester 2019
Algorithms for Graph Visualization
Two Heuristics:Force-Directed Method & Multi-dimensional Scaling
Refs: [GD: AVG, Ch. 10] and [DG: M&M, Ch. 4]

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
How will we do it?
Ideas? Criteria?
Given a graph G = (V , E ),find a
”nice“ drawing Γ , where
• vertices are points and• edges are straight lines
Physical Analogy: attractive vs. repulsive forces.
Case 1: vertices u, v adjacent Case 2: u and v non-adjacent
frepu v u v
• similar edge lengths• greater distances on
non-adjacent vertices
fspring

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Part I – Force Based Methods

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
An iterative approach
Endlayout
SpringEmbedder(G = (V , E ), p = (pv )v∈V , ε > 0, K ∈ N)
t ← 1while t < K and maxv∈V ‖Fv (t)‖ > ε do
foreach v ∈ V doFv (t)←∑
u:uv /∈E frep(pu, pv ) +∑
u:uv∈E fspring(pu, pv )
foreach v ∈ V dopv ← pv + δ · Fv (t)
t ← t + 1
return p
Initial Layout thresholditerations

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Analysis
Advantages Disadvantages
+ very easy
+ surprisingly good fornot too large graphs
– possibly unstable
– ends too soon /stuck in a local minimum.
Timing
In each iteration, we calculate all values of– frep– fspring
O( ) timeO( ) time
– Fv and pv : O(|V |2) time
|E ||V |2

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Force Directed Spring-Embedder by Eades (1984)
Distance
frep(pu, pv ) =crep
‖pv − pu‖· −−→pupv
fspring
l
Force
fspring(pu, pv ) = cspring log‖pv − pu‖
l· −−→pvpu
Unit-vectorfrom pv to pu
Spring constant (e.g. 2.0)
‘natural’ spring length
Repulsion constant (e.g. 1.0)
frep
pu
llv
tou
pu
shv
away

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Forces of Fruchterman & Reingold (1991)
pu
llv
tou
Distance
frep(pu, pv ) =l2
‖pu − pv‖· −−→pupv
fspring = frep + fattr
l
fattr(pu, pv ) =
Force
‖pu − pv‖2
l· −−→pvpu
for edges uv
for all vertex pairs u, vpu
shv
away
‘natural’ spring length

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Speeding up “convergence” – Via Grids
v
[Fruchterman & Reingold (1991)]

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Speeding up – by adaptive displacement δv (t)
SpringEmbedder(G = (V , E ), p = (pv )v∈V , ε > 0, K ∈ N)
t ← 1while t < K and maxv∈V ‖Fv (t)‖ > ε do
foreach v ∈ V doFv (t)←
∑u:uv /∈E frep(pu, pv ) +
∑u:uv∈E fspring(pu, pv )
foreach v ∈ V dopv ← pv + δ · Fv (t)
t ← t + 1
return p
Reminder. . .
δv (t)

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Speeding up – by adaptive displacement δv (t)
Fv (t − 1)
Fv (t)
αv (t)
⇒ larger δv (t)
(Frick, Ludwig, Mehldau 1995)

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Speeding up – by adaptive displacement δv (t)
Fv (t − 1)
Fv (t)
αv (t)
⇒ smaller δv (t)
(Frick, Ludwig, Mehldau 1995)

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Speeding up – by adaptive displacement δv (t)
Fv (t − 1)
Fv (t)αv (t)
F ′v (t)
⇒ smaller δv (t)
(Frick, Ludwig, Mehldau 1995)

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Quad-Tree
R17
R18
QTR0
R1 R2 R3 R4
R5R12
R13
R16
R17 R18

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Calculating repulsive forces (Barnes-Hut 1986)
R0
R1 R2 R3 R4
R5R12
R13
R16
R17 R18
QT
u
σR16
frep(Ri , pu) := |Ri | · frep(σRi , pu)
frep(pu) :=∑
Ri∈Rufrep(Ri , pu)
where Ru = all children of nodes on the R0-u-path in QT
u
σR4

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Part II – Multidimensional Scaling

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Idea: measure and “match” the dissimilarity
Let V = {1, . . . , n} be a lot of objects.
Let D ∈ Rn×n Matrix, where di j ∼ dissimilarty between obj. i , j .
Goal: find x1, . . . , xn ∈ R2, so that
‖xi − xj‖ ≈ di j for all i , j ∈ V
For our drawing, how do we define the dissimilarity between twoobjects, i.e., two vertices?
Answer: The distance between vertices,i.e., the length of a shortest path between them.

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Classic Scaling
Let D(2) = (d2i j)1≤i ,j≤n (note: not D × D).
Compute Matrix B = (bi j) ∈ Rn×n of pseudo products.
Let v1, . . . , vn ∈ Rn be the eigenvectorsof the eigenvalues λ1 ≥ · · · ≥ λn ∈ R of B.
Let X = [x1, . . . , xn]T = [√λ1v1,
√λ2v2].
The minimum strain (X ) = ‖B − X XT‖2 =∑
(bi j − xTi xj)
2.
Good: Find a solution with optimal strain.Bad: numerical inconsistency, dimension reduction degeneracy.
B := −1
2JnD(2)Jn, where Jn = In − 1
n (1n1Tn ),
In = identity matrix1Tn = (1, 1, . . . , 1)
(row & column means of B are zero.)
(project to “largest”eigenvectors)

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Distance Scaling
Definition of strain: set bi j → di j and xTi xj → ‖xi − xj‖:
(unweighted) stress(X ) =∑i ,j
(di j − ‖xi − xj‖)2
(weighted) stress(X ) =∑i ,j
wi j(di j − ‖xi − xj‖)2
where wi j ≥ 0, e.g., wi j = dqij . In graph drawing often q = −2.

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
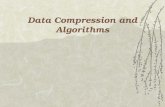
Examples: Classical and Distance Scaling
(a) classical scaling (b) q = 2 (c) q = 0
(d) q = −1 (e) q = −2 (f) q = −4

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
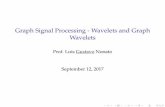
Example (a) Classical Scaling

Steven Chaplick · Lehrstuhl fur Informatik I · Universitat Wurzburg
Example (e) Distance Scaling with q = −2