Agrirobot Navigation System
12
ΣΥΣΤΗΜΑ ΠΛΟΗΓΗΣΗΣ AGRIROBOT ΕΡΓΟ: SAVSAR PROJECT NUMBER: 3298 CALL: NSRF, COMPETITIVENESS AND ENTREPRENEURSHIP, BILATERAL S & T COOPERATION BETWEEN GREECE AND ISRAEL, 2013-2015
-
Upload
george-adamides -
Category
Technology
-
view
29 -
download
0
Transcript of Agrirobot Navigation System

ΣΥΣΤΗΜΑ ΠΛΟΗΓΗΣΗΣ
AGRIROBOT
ΕΡΓΟ: SAVSARPROJECT NUMBER: 3298
CALL: NSRF, COMPETITIVENESS AND ENTREPRENEURSHIP, BILATERAL S
& T COOPERATION BETWEEN GREECE AND ISRAEL, 2013-2015
ΕΙΣΑΓΩΓΉ
Στο πλαίσιο του έργου SAVSAR, με στόχο
τη δημιουργία e-course με αντίστοιχο
εκπαιδευτικό υλικό για δοκιμές,
πειράματα και μεταφορά τεχνογνωσίας
Αξιοποίηση δυνατοτήτων σε νέο πεδίο
(αυτοματοποιημένη μικρο-γεωργία) ώστε
να δεικνύεται η δυνητική ευρύτητα
εφαρμογής των αποτελεσμάτων
ΠΕΡΙΕΧΟΜΕΝΑ
Εφαρμογή πλοήγησης
Απαιτήσεις
Αρχιτεκτονική
Διαδικτυακή εφαρμογή
Διασύνδεση συστήματος πλοήγησης με
ασύρματους αισθητήρες θέσης
Απαιτήσεις
Αρχιτεκτονική
Εφαρμογή
ΑΠΑΙΤΗΣΕΙΣ ΣΥΣΤΗΜΑΤΟΣ ΠΛΟΗΓΗΣΗΣ
Παρουσίαση δεδομένων αισθητήρων agrirobot
στον χρήστη
Κάμερες
Στάθμη μπαταρίας
Αισθητήρας απόστασης (Sonar sensor)
Αλληλεπίδραση με αισθητήρες και robot
Κίνηση κάμερας
Κίνηση agrirobot από την διαδικτυακή εφαρμογή
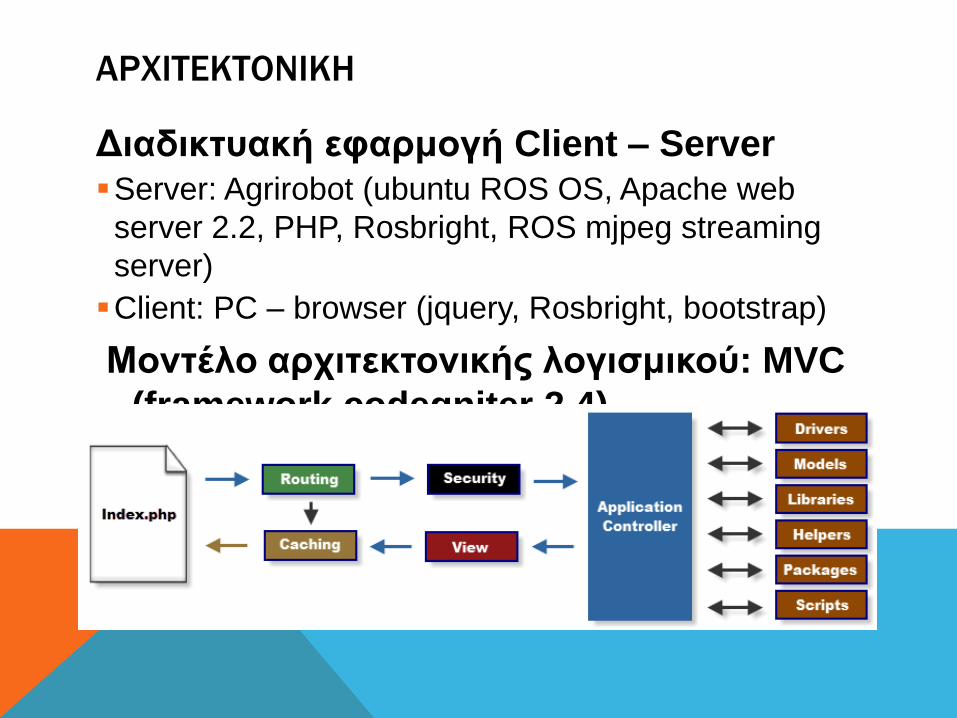
ΑΡΧΙΤΕΚΤΟΝΙΚΗ
Διαδικτυακή εφαρμογή Client – ServerServer: Agrirobot (ubuntu ROS OS, Apache web
server 2.2, PHP, Rosbright, ROS mjpeg streaming
server)
Client: PC – browser (jquery, Rosbright, bootstrap)
Μοντέλο αρχιτεκτονικής λογισμικού: MVC
(framework codegniter 2.4)
ΔΙΑΔΙΚΤΥΑΚΉ ΕΦΑΡΜΟΓΉ
Η σελίδα ταυτοποίησης του χρήστη (Login page)
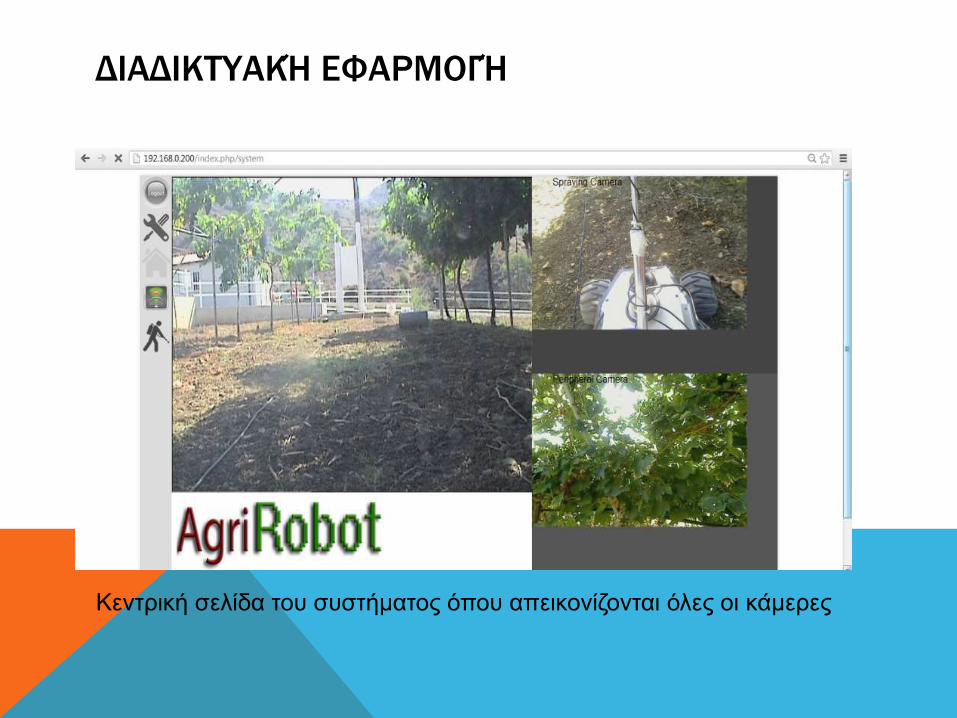
ΔΙΑΔΙΚΤΥΑΚΉ ΕΦΑΡΜΟΓΉ
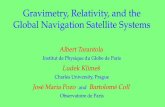
Κεντρική σελίδα του συστήματος όπου απεικονίζονται όλες οι κάμερες

ΔΙΑΔΙΚΤΥΑΚΉ ΕΦΑΡΜΟΓΉ
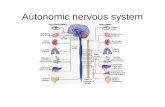
Η σελίδα οδήγησης του robot. Ο χρήστης παρακολουθεί μόνο τις
κάμερες που αφορούν την οδήγηση

ΔΙΑΔΙΚΤΥΑΚΉ ΕΦΑΡΜΟΓΉ
Η σελίδα χρήσης του Robot για ψεκασμό. Ο χρήστης παρακολουθεί την
κεντρική κάμερα και την κάμερα που έχει τη γωνία λήψης του
ψεκαστήρα

ΑΠΑΙΤΉΣΕΙΣ ΣΥΣΤΉΜΑΤΟΣ ΠΛΟΉΓΗΣΗΣ ΜΕ
ΑΣΎΡΜΑΤΟΥΣ ΑΙΣΘΗΤΉΡΕΣ ΘΈΣΗΣ
Μετακίνηση γωνίας λήψης της κύρια
κάμερας robot με τη χρήση του
συστήματος Pohemus wireless
positioning sensor από τον υπολογιστή
του χρήστη.
Επιπλέον θα υπάρχει δυνατότητα να γίνει
μετακίνηση της γωνίας λήψης της
κάμερας του robot χειροκίνητα από το
χρήστη με τη χρήση mouse

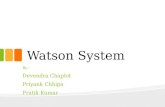
ΑΡΧΙΤΕΚΤΟΝΙΚΗ
Controller
Polemus Wireless Sensor
Camera
Τα βασικά module του συστήματος πλοήγησης του robot με τους ασύρματος
αισθητήρες θέσης. Ο controller αναλαμβάνει μέσω ενός δειγματολήπτη να
διαβάζει τις τιμές εξόδου του Pohemus wireless sensor και βάση κάποιων
κριτηρίων να καθορίζει τη γωνία λήψης της κάμερας.
Pohemus wireless sensor
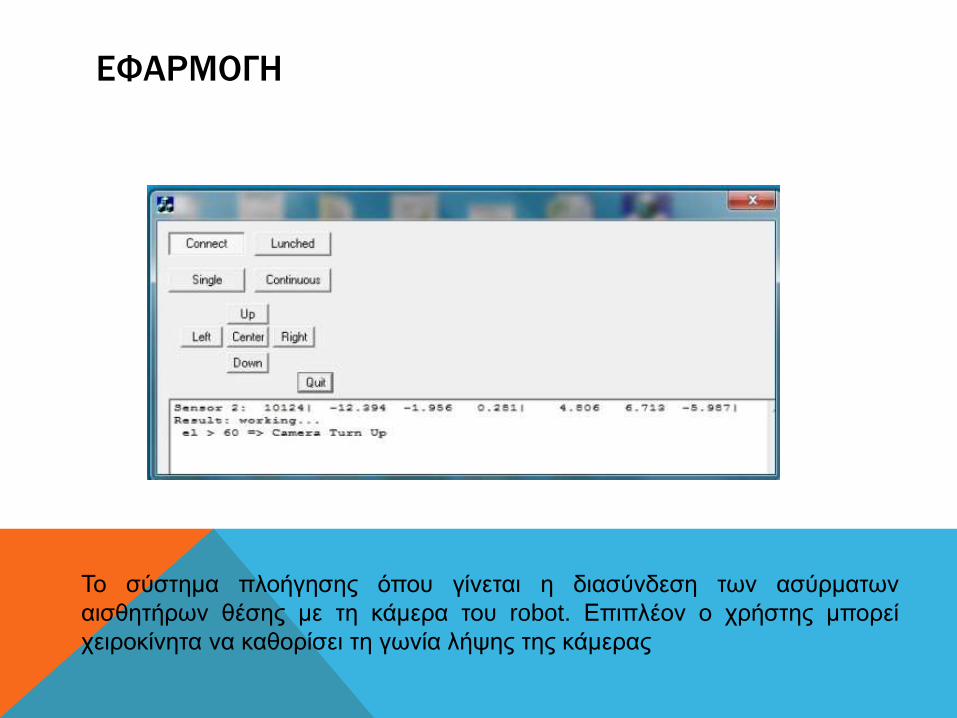
ΕΦΑΡΜΟΓΗ
Το σύστημα πλοήγησης όπου γίνεται η διασύνδεση των ασύρματων
αισθητήρων θέσης με τη κάμερα του robot. Επιπλέον ο χρήστης μπορεί
χειροκίνητα να καθορίσει τη γωνία λήψης της κάμερας