adakdh1/ada/ada07c6.pdf · Page 1 Example: Correct the Bias in (S2)1/2 Define Derivatives:...
4
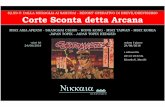
Page 1 Example: Correct the Bias in (S 2 ) 1/2 Define Derivatives: Evaluate the bias: y( x) = x b , y '( x) = bx b−1 , y"( x) = b (b −1) x b−2 S 2 ( ) b = y S 2 ( ) + y" S 2 ( ) 2 Var S 2 ( ) +... = y σ 2 ( ) + y" σ 2 ( ) 2 2σ 4 N −1 +... = σ 2b + b (b −1)σ 2(b−2) 2 2σ 4 N −1 +... = σ 2b 1+ b (b −1) N −1 +... " # $ % & ' S 2 ( ) p/2 = σ p 1+ p( p − 2) 4( N −1) + O( N −2 ) " # $ % & ' Bias-corrected: S ≡ 1 − p( p − 2) 4( N −1) +... # $ % & ' ( 1/ p 1 N −1 X − μ ( ) 2 i=1 N ∑ # $ % & ' ( 1/2 S p = σ p S 2 (S 2 ) 1/2 σ 2 σ Review : “Badness-of-Fit” Statistics Sample Variance mean S 2 ≡ 1 N −1 X i − μ i ( ) 2 i=1 N ∑ → X Chi-squared optimal average χ 2 ≡ X i − μ i σ i 2 i=1 N ∑ → ˆ X Mean Absolute Deviation median MAD ≡ 1 N X i − μ i i=1 N ∑ → X M Sum Absolute Normalised Errors: SANE ≡ X i − μ i σ i i=1 N ∑ Sigma-clip ε 2 | ε | ± K σ χ 2 | χ | Badness functions: Error Bars live with the Model Not with the Data Usually the distinction is unimportant. But sometimes it is important. Error bars live with the model, not the data! Example: Poisson data: How to attach error bars to the data points? The wrong way: Assigning σ(X i )= √X i gives a downward bias. Points lower than average by chance are given smaller error bars, and hence more weight than they deserve. The right way: Assign σ= √ λ, where λ = mean count rate predicted by the model. 0 2 4 6 8 10 0 5 10 15 20 λ i X i Prob( x = n | λ) = λ n e −λ n! n = 0, 1, 2, ... X i = λ, σ 2 ( X i ) = λ If σ X i ( ) = X i , then 1 σ 2 = ∞ when X i = 0 and ˆ X ≡ X i /σ i 2 i ∑ 1/σ i 2 i ∑ = 0 ⋅∞ ∞ = 0 , clearly wrong ! Maximum Likelihood (ML) Estimation Likelihood of parameters α for a given dataset: Example: Gaussian errors: L(α) ≡ P( X | α) = P( X 1 | α) × P( X 2 | α) × ... × P( X N | α) ≡ P( X i | α) i=1 N ∏ To maximise L(α), minimise χ 2 + lnσ 2 i i ∑ P( X i | α) = 1 2 π σ i exp − 1 2 X i − μ i α ( ) σ i " # $ % & ' 2 ( ) * + * , - * . * L α ( ) = exp − χ 2 2 { } Z D , Z D ≡ 2 π ( ) N/2 σ i i=1 N ∏ BoF = − 2 ln L = χ 2 + lnσ 2 i + N ln 2 π ( ) i ∑ Maximum Likelihood Parameters α ML satisfies 0= ∂ ∂α [−2ln L( α)], Var[ α ML ] ≈ 2 ∂ 2 ∂α 2 [−2ln L(α)] α=αML Generalises χ 2 fitting. 1. For parameters that affect σ 2. For non-Gaussian errors Need ML when Parameters alter Error Bars • Data points X i with no error bars: • To find μ, minimise χ 2 . • To find σ , minimising χ 2 fails! • ML method minimises χ 2 = X i − μ σ i=1 N ∑ 2 χ 2 → 0 as σ →∞ − 2 ln L = χ 2 + N lnσ 2 60 70 80 90 100 110 120 0 5 10 15 20 i X i χ 2 σ ML 2 N ln σ -2 ln L 0 50 100 150 200 250 300 350 0 10 20 σ
Transcript of adakdh1/ada/ada07c6.pdf · Page 1 Example: Correct the Bias in (S2)1/2 Define Derivatives:...

Page 1
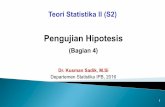
Example: Correct the Bias in (S2)1/2
Define Derivatives:Evaluate the bias:
y(x) = xb, y '(x) = b xb−1, y"(x) = b(b−1)xb−2
S2( )b= y S2( )+
y" S2( )2
Var S2( )+...
= y σ 2( )+y" σ 2( )
22σ 4
N −1+...
=σ 2b +b(b−1)σ 2(b−2)
22σ 4
N −1+... =σ 2b 1+ b(b−1)
N −1+...
"
#$
%
&'
S2( )p/2
=σ p 1+ p(p− 2)4(N −1)
+ O(N −2 )"
#$
%
&'
Bias-corrected: S ≡ 1− p(p− 2)4(N −1)
+...#
$%
&
'(
1/p1
N −1X −µ( )2
i=1
N
∑#
$%
&
'(
1/2
S p =σ p
S2
(S2)1/2
σ2
σ
Review : “Badness-of-Fit” StatisticsSample Variance mean
S2 ≡
1
N −1Xi−µ
i( )2
i=1
N
∑ → X
Chi-squared optimal average
χ 2 ≡Xi−µ
i
σi
2
i=1
N
∑ → X̂
Mean Absolute Deviation median
MAD ≡1
NXi−µ
i
i=1
N
∑ → XM
Sum Absolute Normalised Errors:
SANE ≡Xi−µ
i
σii=1
N
∑
Sigma-clip ε 2
| ε |
€
± K σ
χ 2
| χ |
Badness functions:
Error Bars live with the Model
Not with the Data
Usually the distinction is unimportant.
But sometimes it is important.
Error bars live with the model, not the data!Example: Poisson data:
How to attach error bars to the data points?The wrong way:
Assigning σ(Xi )= √Xi gives a downward bias. Points lower than average by chance are given smaller error bars, and hence more weight than they deserve.
The right way: Assign σ= √ λ, where λ = mean count rate predicted by the model.
0
2
4
6
8
10
0 5 10 15 20
λ
i
Xi
€
Prob(x = n | λ) =λn e−λ
n! n = 0, 1, 2, ...
Xi
= λ, σ 2(X
i) = λ
€
If σ Xi( ) = X
i, then 1 σ 2 =∞ when X
i= 0
and ˆ X ≡
Xi/σ
i
2
i
∑
1/σi
2
i
∑=
0 ⋅ ∞
∞= 0 , clearly wrong !
Maximum Likelihood (ML) EstimationLikelihood of parameters α for a given dataset:
Example: Gaussian errors:
€
L(α) ≡ P(X |α) = P(X1 |α) × P(X2 |α) × ...× P(XN
|α)
≡ P(Xi|α)
i=1
N
∏
To maximise L(α), minimise χ 2 + lnσ 2i
i∑
P(Xi |α) = 12π σ i
exp −12Xi −µi α( )
σ i
"
#$
%
&'
2()*
+*
,-*
.*
L α( ) =exp −χ 2 2{ }
ZD
, ZD ≡ 2π( )N /2σ i
i=1
N
∏
BoF = − 2 lnL = χ 2 + lnσ 2i + N ln 2π( )
i∑
Maximum Likelihood Parameters
€
αML satisfies 0 =∂
∂α[−2lnL(α)],
Var[αML ] ≈2
∂ 2
∂α 2[−2lnL(α)]
α=α
ML
Generalises χ2 fitting.1. For parameters that affect σ
2. For non-Gaussian errors
Need ML when Parameters alter Error Bars• Data points Xi with no error bars:
• To find µ, minimise χ2.• To find σ , minimising χ2 fails!
• ML method minimises
χ 2=
Xi−µ
σ
i=1
N
∑2
χ 2→ 0 as σ → ∞
− 2 lnL = χ 2 + N lnσ 2
60
70
80
90
100
110
120
0 5 10 15 20 i
Xi
χ2
σML
2 N ln σ
-2 ln L
0
50
100
150
200
250
300
350
0 10 20 σ

Page 2
Need ML to fit low-count Poisson Data
Example : Poisson data :
Likelihood for N Poisson data points :
Maximum likelihood estimator of λ :
P(X = n | λ) = e−λλ n
n !n = 0,1,...∞
€
L(λ) = P(Xi| λ)
i=1
N
∏ =e−λ λX i
Xi!
i=1
N
∏
lnL = − λ + Xilnλ − lnX
i!( )
i
∑
€
∂ lnL
∂ λ= −N +
1
λXi
i
∑ = 0 at λ = λML
∴ λML
=1
NXi
i
∑ .
0
2
4
6
8
10
12
14
16
18
20
0 2 4 6 8 10
i
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10
€
L(λ)
€
λ
€
Xi
0
0.05
0.1
0.15
0.2
0.25
0.3
0 2 4 6 8 10
λ=1
λML=4.5λ=7
€
P(X | λ)
€
X
Conditional Probabilities P(X,Y) = joint probability density of X and YP(X) = projection of P(X,Y) onto X axis.
Conditional Probability: P( X | Y ) = “probability of X given Y ” = “normalised slice” of P( X,Y ) at a fixed value of Y.
€
P(X |Y ) ≡P(X,Y )
P(Y )=
P(X,Y )
P(X,Y ) dX∫
Y
XP( X )
P( X | Y )
P( X, Y )
€
P(X) = P(X,Y ) dY∫
Test Understanding
Y = 3 XX = Gaussian
P( Y | X = 2 ) = ?
P( Y | X > 2 ) = ?
X
Y
1 2 3
Y
Y
Test Understanding
Y = 3 XX = Gaussian
P( Y | X = 2 ) = ?
P( Y | X > 2 ) = ?
X
Y
1 2 3
Y6
Y
Test Understanding
Y = 3 XX = Gaussian
P( Y | X = 2 ) = ?
P( Y | X > 2 ) = ?
X
Y
1 2 3
Y6
Y6
Conditional Probabilities
P(X) = projection onto X axis. P(Y) = projection onto Y axis.
Conditional Probability: P( X | Y ) = normalised slice at fixed Y P( Y | X ) = normalised slice at fixed X
Y
XP( X )
P( X | Y )
P( Y
)
P( Y
| X
)
P( X, Y )
€
P(X) = P(X,Y ) dY∫P(Y ) = P(X,Y ) dX∫
P(X |Y ) ≡P(X,Y )
P(Y )P(Y | X) ≡
P(X,Y )
P(X)
P(X,Y ) = P(X |Y ) P(Y )
= P(Y | X) P(X)

Page 3
Bayes’ Theorem and Bayesian InferenceBayes’ Theorem:
Bayesian Inference :
Shows us how to change our probability distribution over various models in light of new data.€
P(model | data) =P(data |model) P(model)
P(data)
€
Since P(X,Y ) = P(X |Y ) P(Y ) = P(Y | X) P(X)
then P(X |Y ) =P(Y | X) P(X)
P(Y )=
P(Y | X) P(X)
P(Y | X) P(X)∫ dX€
P(X |Y ) =P(Y | X) P(X)
P(Y )
Inferences depend on Prior, not just DataBayesian inference: ( M = model, D = data )
• The Likelihood, P( data | model ), is quantified by a “badness-of-fit” statistic. e.g. P( data | model ) ~ exp(-χ2/2)
• The Prior, P( model ) expresses your prejudice (prior knowledge).• The Posterior, P( model | data ), gives your inference, the relative
probabilities of different models (parameters), in light of the data. €
Posterior Probability = (Likelihood ×Prior Probability) / Evidence
P(M |D) =P(D | M) P(M)
P(D)=
P(D | M) P(M)
P(D | M)P(M)dM∫Relative probability of two models M1 and M2 :
P(M1 |D)
P(M2 |D)=P(D | M1)
P(D | M2)×P(M1)
P(M2)≈ exp
−Δχ 2
2
×
P(M1)
P(M2)
No absolute inferences ! New data updates your prior expectations, but your conclusions depend also on your prior.
Choice of Prior• A model for a set of data X depends on a parameter α.
• Knowledge of α before measuring X is quantified by the prior P(α).
• Choice of P(α) is arbitrary, subject to common sense!
• After measuring X, Bayes theorem gives posterior :
• Different priors P(α) lead to different inferences :
X
α
P( X
| α
)
P( α ) ~ 1 / α
Uniform P( log α )
P( α | X ) ~ L( α ) P( α )
P( α )
P( α | X ) ~ L( α ) P( α )
L( α )
Uniform P( α )
L( α )P α | X( )∝ P X |α( )P α( )= L(α) P α( )
Max Likelihood and Bayesian Inference
€
P(X |α)
€
α1
€
α2
Parameter Space
€
X1
€
X2
Data Space
€
α1€
α2
Model
€
P(α | X) =P(X |α) P(α)
P(X |α) P(α) dα∫∝L(α) P(α)
€
X1
€
X2 Specific Dataset
Likelihood Function
Bayesian Inference:€
αML
maximises L(α)
€
L(α) ≡ P(X |α)
+
Likelihood updates the Prior.
Posterior Probability
αMAP maximises posterior : L α( )P α( )
N=1 Gaussian Datum with Uniform Prior
€
Data : X ±σ Model parameter : µ
Likelihood function :
L(µ) ≡ P(X | µ) =e
−1
2
X −µ
σ
2
2π σ
µML
= X maximises L(µ).
Posterior probability :
P(µ | X) =P(X | µ) P(µ)
P(X)
P(X) = P(X | µ) P(µ) dµ∫
€
X
€
µ€
P(X |µ)
€
µML
= X
€
µ€
P(µ | X)
€
P(µ) = constant
Uniform prior:
Maximum Likelihood implicitly assumes a Uniform Prior
N=1 Gaussian Datum with Gaussian PriorGaussian Data: X ±σ
Likelihood: L(µ)≡P(X |µ) = 12π σ
e−
12X−µσ
#
$%
&
'(
2
Prior: P(µ) = 12π σ 0
e−
12µ−µ0σ 0
#
$%
&
'(
2
Posterior : P(µ | X)∝ Likelihood x Prior
L(µ) P(µ)∝ e−
12X−µσ
#
$%
&
'(
2
e−
12µ−µ0σ 0
#
$%
&
'(
2
∝ exp −12µ −µMAP
σ µMAP( )
#
$%%
&
'((
2*+,
-,
./,
0,
€
X
€
µ€
P(X |µ)
Same as Optimal Average !Gaussian prior acts like 1 more data point.
Data “pulls” the probability away from the prior, and vice-versa.
Verify this result.
µMAP =
µ0
σ 02 +
Xσ 2
1σ 0
2 +1σ 2
, Var µMAP( ) = 11σ 0
2 +1σ 2
. €
X
€
µ
L(µ)
€
P(µ)
€
µ0
Likelihood x Prior:
µMAPMaximum Posterior (MAP) estimate:

Page 4
N Gaussian Data with Gaussian PriorLikelihood: L(µ) ≡ P(X |µ) = P Xi |µ( )
i=1
N
∏ =exp −
12χ 2{ }
2π( )N /2σ i
i∏
Prior: P(µ) =1
2π σ 0
exp −12µ −µ0
σ 0
$
%&
'
()
2*+,
-,
./,
0,
Posterior : P(µ | X)∝Likelihood x Prior
L(µ) P(µ) ∝ exp −χ 2
2−
12µ −µ0
σ 0
$
%&
'
()
2*+,
-,
./,
0,∝ exp −
12µ −µMAP
σ µMAP( )
$
%&&
'
())
2*+,
-,
./,
0,
€
Xi
€
µ€
P(Xi|µ)
Same as Optimal Average !
Gaussian prior acts like 1 more data point.
µMAP =
µ0
σ 02 +
Xi
σ i2
i=1
N
∑1σ 0
2 +1σ i
2i=1
N
∑ , σ 2 µMAP( ) = 1
1σ 0
2 +1σ i
2i=1
N
∑.
X̂
€
µ
L(µ)
€
P(µ)
€
µ0
Likelihood x Prior:
µMAP
Maximum Posterior (MAP) estimate:
1. Error bars live with the Model, not with the Data.2. Bayes Theorem (Bayesian Inference)
3. Maximum Likelihood, e.g. for Gaussian Data:
4. Minimise χ2 if Gaussian errors with known σi . 5. or Maximise likelihood ( e.g. minimise BoF = -2 ln L ), if error bars unknown, or low-count Poisson data.6. or full Bayesian analysis, including the prior: e.g. for Gaussian Data:
Summary:
P(Model | Data) = P(Data |Model) P(Model)P(Data)
BoF = −2 lnP(Model | Data) = χ 2 + lnσ 2i
i=1
N
∑ − 2 lnP(Model)+ const
L(Model) ≡ P(Data | Model)
BoF = −2 lnL = χ 2 + lnσ 2i
i=1
N
∑ + const







![spin-adaptedcon gurations unrestrictedusers.df.uba.ar/rboc/em3/Adaptaciones de spin.pdf · contain any spin coordinates and hence both S2 and Sz commute with the Hamiltonian [H;S2]](https://static.fdocument.org/doc/165x107/5f11104086f782404b087fcf/spin-adaptedcon-gurations-de-spinpdf-contain-any-spin-coordinates-and-hence-both.jpg)