AC en DC Motorregeling
21
1 1 AC- en DC-motorregeling 2 DC-motorregeling De DC-motor : shuntmotor met onafhankelijke bekrachtiging A1 A2 (B2) U A E1 E2 U E anker (rotor) veldwikkeling (stator) U E = vast E E = k.n.Φ Φ I E ≈ U A U A ≈ k.n.Φ Φ ≈ . k U n Koppel : M = k’. Φ.I
-
Upload
pieter-delva -
Category
Documents
-
view
38 -
download
1
description
AC en DC Motorregeling
Transcript of AC en DC Motorregeling

1
1
AC- en DC-motorregeling
2
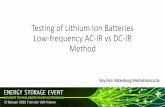
DC-motorregeling
De DC-motor : shuntmotor met onafhankelijke bekrachtiging
A1
A2 (B2)
UA
E1
E2
UE
anker (rotor) veldwikkeling (stator)
UE = vast
E
E = k.n.ΦΦ
I
E ≈ UA
UA ≈ k.n.Φ
Φ≈
.k
Un
Koppel : M = k’. Φ.I

2
3
Draaizin van een dc-motor
A1
A2 (B2)
E1
E2
UEEΦ
-
+
-
+
+
-
draaizin motor
DC-motorregeling
n ~ UA
UA
Φ (UE) = cte n
n+
n+
4
Volgestuurde thyristorbrug levert regelbare positieve spanning :
-
+
L1L2
L3
DC-motorregeling : met thyristorbrug
I+A1
A2
n+M+

3
5
L1
L2
L3
+
-
I+
n-M-
A1
A2
Volgestuurde thyristorbrug levert regelbare negatieve spanning :
DC-motorregeling : met thyristorbrug
6
L1L2L3
brug 2brug 1
Motor kan draaien en remmen in de twee richtingen :
VIERKWADRANTENBEDRIJF
DC-motorregeling : met 2 antiparallelle thyristorbrugen

4
7
L1L2L3
brug 2brug 1
Kwadrant 1 : brug 1 in werking, machine werkt als motor
I
E
DC-motorregeling : met 2 antiparallelle thyristorbrugen
8
L1L2L3
brug 2brug 1
Kwadrant 2 : brug 2 in werking, machine werkt als generator en wordt afgeremd
I
E
DC-motorregeling : met 2 antiparallelle thyristorbrugen

5
9
L1L2L3
brug 2brug 1
Kwadrant 3 : brug 2 in werking, machine werkt als motor
I
E
DC-motorregeling : met 2 antiparallelle thyristorbrugen
10
L1L2L3
brug 2brug 1
Kwadrant 4 : brug 1 in werking, machine werkt als generator en wordt afgeremd
I
E
DC-motorregeling : met 2 antiparallelle thyristorbrugen

6
11
Een praktischvoorbeeld :
SIMOREG K(Siemens)
+ -
~
via diodebrug
12
Encoders: toerentalmeting, positionering
roterende
lineaire
2 types : absolute en incrementele encoders

7
13
Lineaire encoders
Plaatsbepaling (positionering) bij bv. CNC-machines.
Resoluties mogelijk tot enkele µm !!
genereert een pulsbv. per 4 µm verplaatsing
14
Absolute encoders (prinipiele opbouw)
a. Graycodeb. Binaire code

8
15
Binaire- versus Gray-code
Van positie 7 naar 8 moeten4 bits tegelijkertijd van toestandveranderen (productiefout !!)
Van positie 7 naar 8 moetmaar 1 bit van toestandveranderen.
16
Absolute encoders : resolutie
Elke stand komt overeen met eenbepaalde code.Bv. Bij 9 tracks : 0011001101 track = 1 bitDit is dus een 9-bit encoder !
Hoe meer tracks, hoe meer bits, hoe kleiner de asverplaatsing die kan gemeten worden !bv. 9 tracks = 9 bits = 29 = 512 verschillende posities voor 360°
12 tracks = 10 bits = 212 = 4096 verschillende posities voor 360°
1 track

9
17
Incrementele encoders
referentie
4x de frequentie van A en Bflankenvan A en B
Kanaal A
Kanaal B
referentie
Quadratuurencoder
18
Opbouw en vereenvoudigd blokschema van een incrementele encoder

10
19
Blokschema van een dc-motorregeling
ngewenst
-10 ... +10 V-100 ... + 100 %
ngemeten-10 ... +10 V-100 ... + 100 %
+
-
E = ngewenst- ngemeten
igewenst
igemeten
α
Doel van n- en i-regelaar : E nul maken !!
n-regelaar i-regelaar
20
DC-motorregeling : hakkerschakelingen
Mosfetregeling met halve brug : éénkwadrantenbedrijf
B A B A
UA(AV)
IAA
B UA
IA
I.p.v. Flywheel MOSFET kan ook een diode gebruikt worden (vermogendissipatie) !!

11
21
DC-motorregeling : hakkerschakelingen
H-brug : tweekwadrantenbedrijf
Principe van een H-brug
A1 A2
22
DC-motorregeling : hakkerschakeling
H-brug : tweekwadrantenbedrijf
A en D bekrachtigd : draairichting 1

12
23
DC-motorregeling : hakkerschakeling
H-brug : tweekwadrantenbedrijf
B en C bekrachtigd : draairichting 2
24
DC-motorregeling : hakkerschakeling
H-brug : tweekwadrantenbedrijf

13
25
vrijloopdiodes
DC-motorregeling : hakkerschakeling
26
Spanning- en stroomverloop
via vrijloopdiodes
DC-motorregeling : hakkerschakeling

14
27
Mosfetregeling van dc-motoren : H-brug
Voorbeeld van een H-brug in IC-uitvoering: LMD18200
LMD18200
28
Mosfetregeling van dc-motoren : H-brug
Voorbeeld van een H-brug in IC-uitvoering: LMD18200
TJ=170°C
VS < 10V
10 A
377 µA/A
TJ=145°Cindienf > 1 kHz
DMOS : geleidt in 2 richtingen !! 4 KW-bedrijf mogelijk !!

15
29
Mosfetregeling van dc-motoren : H-brug
Voorbeeld van een H-brug in IC-uitvoering: LMD18200
Werkingsmodus 1 :Sign/Magnitude Control
IA
IAUA
UA(AV)
VCC
0
30
Mosfetregeling van dc-motoren : H-brug
Voorbeeld van een H-brug in IC-uitvoering: LMD18200
Werkingsmodus 2 :Locked Antiphase Control
VCC
-VCC
0
UA(AV)
IA
UA IA0

16
31
AC-motorregeling :d.m.v. frequentieomvormers
De driefasige inductiemotor of kooiankermotor
rotor = aluminium kooi
stator = driefasige wikkeling
32
Ontstaan van draaiveld en toerental
AC-motorregeling :d.m.v. frequentieomvormers

17
33
Aansluiten van een kooiankermotor
U1 V1 W1 U1 V1 W1
W2 U2 V2 W2 U2 V2
motor in ster motor in driehoek
L1 L2 L3 L1 L2 L3
bv. op motor staat220/380 V
Bij netspanning3 x 220 : driehoek3 x 380 : ster
AC-motorregeling :d.m.v. frequentieomvormers
34
U1 V1 W1 U1 V1 W1
W2 U2 V2 W2 U2 V2
motor in ster motor in driehoek
L1 L2 L3 L1 L2 L3
Draaizin van de motor
Bij deze aansluitingdraait de motorin uurwijzerzin.
Bij omwisselen van2 fasen, draait demotor andersom.
AC-motorregeling :d.m.v. frequentieomvormers

18
35
Toerental van de motor
)1(.60.
sp
fn −=
bv. f = 50 Hzp = 2s = 0,02n = 2940 tr/min
n in tr/min
Dus door f te veranderenkan het toerental veranderdworden.
AC-motorregeling :d.m.v. frequentieomvormers
36
De frequentieomvormer
f = vast : 50 HzU = vast : 3 x 380V
f = 0 ... 400 HzU = 0 ... 380 V
Soepel regelen van nd.m.v. variëren van fen U !!
AC-motorregeling :d.m.v. frequentieomvormers

19
37
Waarom moet U samen veranderen met f ?
Statorwikkeling = spoel = L
I door motor :ω.L
UI=
Bij 380 V en 50 Hz loopt door de wikkeling denominale motorstroom bv. 10 A.Indien f = 25 Hz wordt en U blijft hetzelfde wordt I = 20 A !!De motor zou verbranden !!
Dus U en f moeten samen evenredig wijzigen.
ω = 2.π.f
AC-motorregeling :d.m.v. frequentieomvormers
38
Hoe is een frequentieomvormer opgebouwd ?
inverter
AC-motorregeling :d.m.v. frequentieomvormers

20
39
Spanning over en stroom door de statorwikkeling
Spanning
PWM-signaal = Usinus = grondgolf = U1
Stroom
Verhakkelde sinusZorgt voor - extra opwarming in motor- storingen !!
AC-motorregeling :d.m.v. frequentieomvormers
40
Gevolgen van PWM-spanning
De uitgangsspanning op omvormer vermeld door de fabrikant is U1 en niet U (de werkelijke uitgangsspanning).
U > U1
U kan enkel correct gemeten worden met een RMS-meter.
U1 kan enkel gemeten worden met een netspanningsanalyser,bv. FLUKE41.
AC-motorregeling :d.m.v. frequentieomvormers

21
41
Nog enkele aandachtspunten
1. Opletten bij lagere frequenties : motorkoeling !!
2. (Elektronische) thermische beveiliging zit in omvormer.
3. Een frequentieomvormer kan storingen (EMC) veroorzaken !!
4. Via een frequentieomvormer kan een driefasige motorprobleemloos gebruikt worden bij een enkelfasig net!
5. Een frequentieomvormer zorgt voor extra geluidshinder !
AC-motorregeling :d.m.v. frequentieomvormers