A Review of Solution Techniques for Unsteady ... · A Review of Solution Techniques for Unsteady...
72
A Review of Solution Techniques for Unsteady Incompressible Flow David Silvester School of Mathematics University of Manchester Zeist 2009 – p. 1/57
Transcript of A Review of Solution Techniques for Unsteady ... · A Review of Solution Techniques for Unsteady...
A Review of SolutionTechniques for Unsteady
Incompressible Flow
David SilvesterSchool of Mathematics
University of Manchester
Zeist 2009 – p. 1/57
Outline
• PDEs
• Review : 1966 – 1999
• Update : 2000 – 2009
Zeist 2009 – p. 2/57
Outline
• PDEs•
∂~u
∂t+ ~u · ∇~u− ν∇2~u+ ∇p = 0
∇ · ~u = 0
Navier–Stokes
Zeist 2009 – p. 3/57
Outline
• PDEs•
∂~u
∂t+ ~u · ∇~u− ν∇2~u+ ∇p = 0
∇ · ~u = 0
Navier–Stokes
•∂~u
∂t+ ~u · ∇~u− ν∇2~u+ ∇p = ~jT
∇ · ~u = 0
∂T
∂t+ ~u · ∇T − ν∇2T = 0
Boussinesq
Zeist 2009 – p. 4/57
Navier-Stokes Equations
∂~u
∂t+ ~u · ∇~u− ν∇2~u+ ∇p = 0 in W ≡ Ω × (0, T )
∇ · ~u = 0 in W
Boundary and Initial conditions
~u = ~g on ΓD × [0, T ];
ν∇~u · ~n− p~n = ~0 on ΓN × [0, T ];
~u(~x, 0) = ~u0(~x) in Ω.
Zeist 2009 – p. 5/57
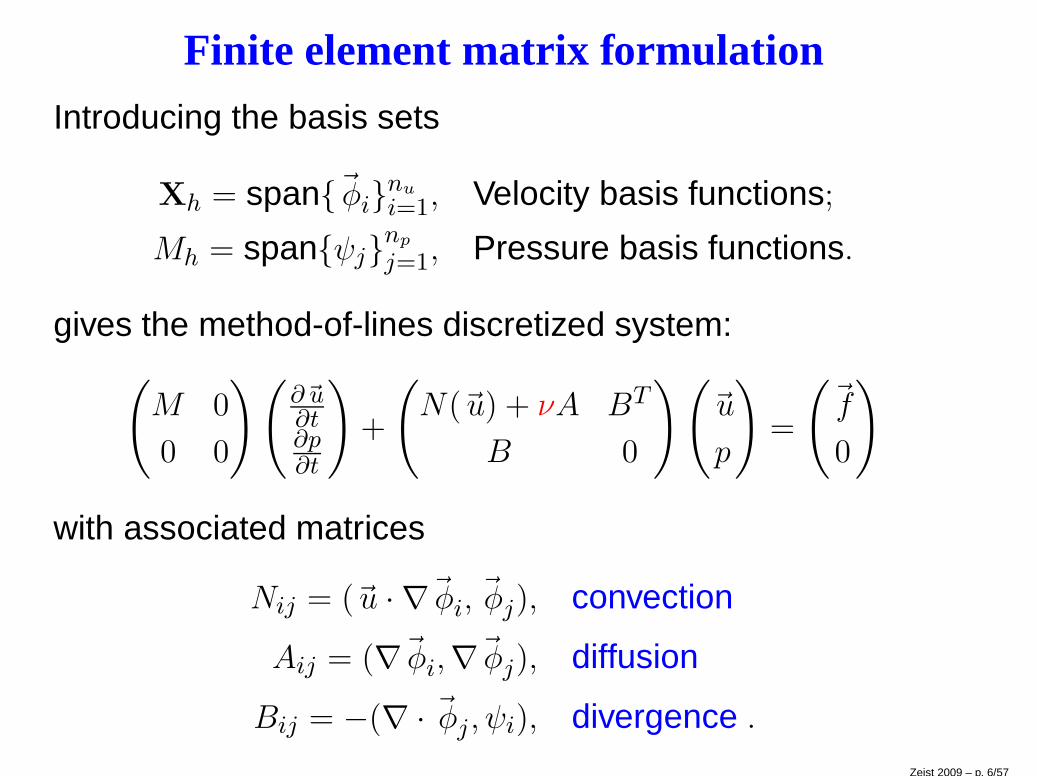
Finite element matrix formulation
Introducing the basis sets
Xh = span~φinu
i=1, Velocity basis functions;
Mh = spanψjnp
j=1, Pressure basis functions.
gives the method-of-lines discretized system:(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
N(~u) + νA BT
B 0
)(
~u
p
)
=
(~f
0
)
with associated matrices
Nij = (~u · ∇~φi, ~φj), convection
Aij = (∇~φi,∇~φj), diffusion
Bij = −(∇ · ~φj , ψi), divergence .Zeist 2009 – p. 6/57
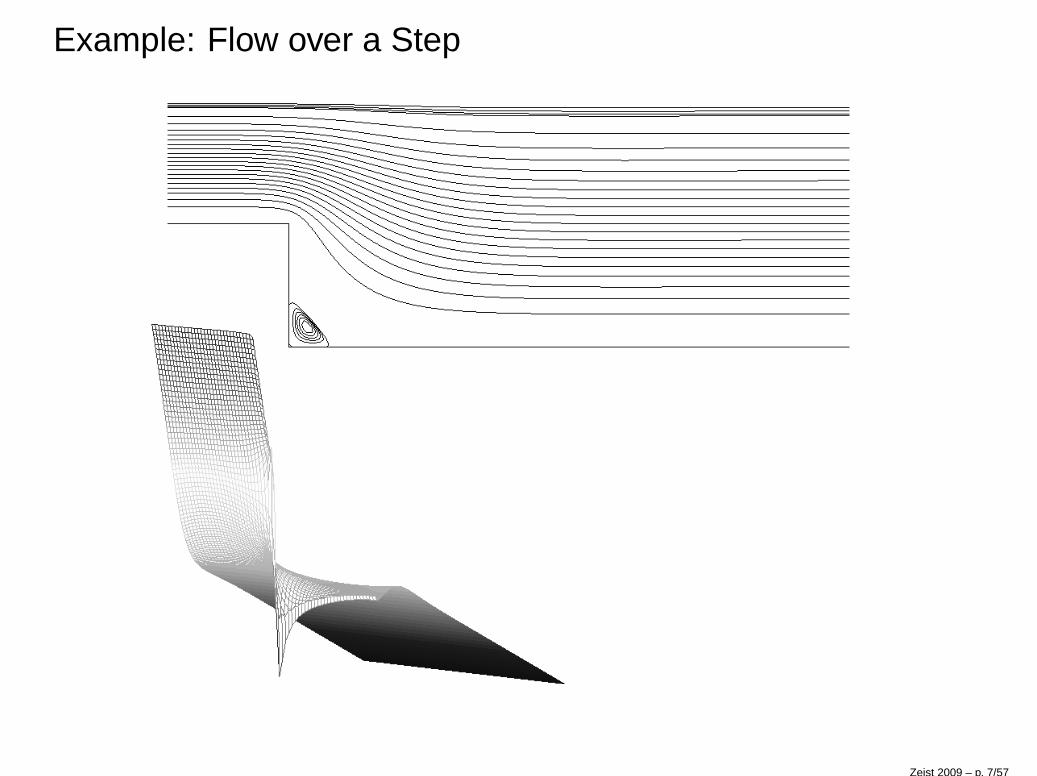
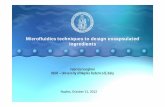
Example: Flow over a Step
Zeist 2009 – p. 7/57
Outline
• PDEs
• Review : 1966 – 1999
• Update : 2000 – 2009
Zeist 2009 – p. 8/57
Outline
• PDEs
• Review : 1966 – 1999• 1967• 1982• 1991• 1999
Zeist 2009 – p. 9/57
Spatial Discretization— I
Suppose that Ω ⊂ R2. Introducing ~u = (ux, uy) gives
∂ux
∂t+
(
ux∂
∂x+ uy
∂
∂y
)
ux − ν∇2ux +∂p
∂x= 0
∂uy
∂t+
(
ux∂
∂x+ uy
∂
∂y
)
uy − ν∇2uy +∂p
∂y= 0
−(∂ux
∂x+∂uy
∂y
)
= 0
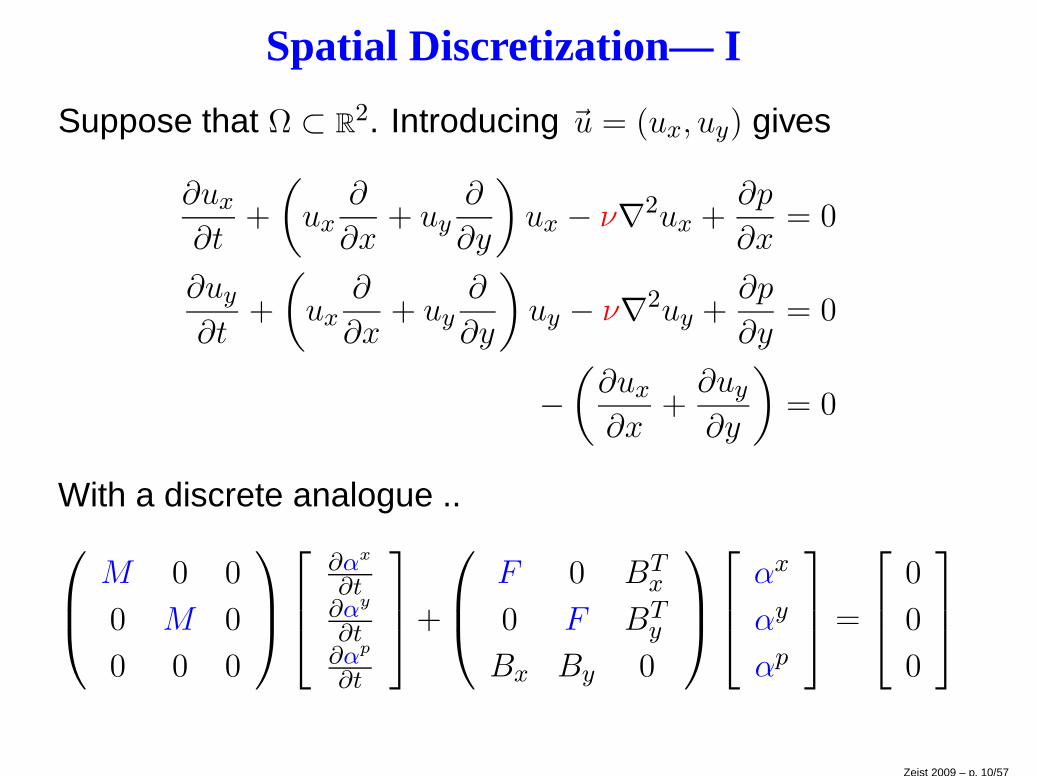
With a discrete analogue ..
Zeist 2009 – p. 10/57
Spatial Discretization— I
Suppose that Ω ⊂ R2. Introducing ~u = (ux, uy) gives
∂ux
∂t+
(
ux∂
∂x+ uy
∂
∂y
)
ux − ν∇2ux +∂p
∂x= 0
∂uy
∂t+
(
ux∂
∂x+ uy
∂
∂y
)
uy − ν∇2uy +∂p
∂y= 0
−(∂ux
∂x+∂uy
∂y
)
= 0
With a discrete analogue ..
M 0 0
0 M 0
0 0 0
∂αx
∂t∂αy
∂t∂αp
∂t
+
F 0 BTx
0 F BTy
Bx By 0
αx
αy
αp
=
0
0
0
Zeist 2009 – p. 10/57
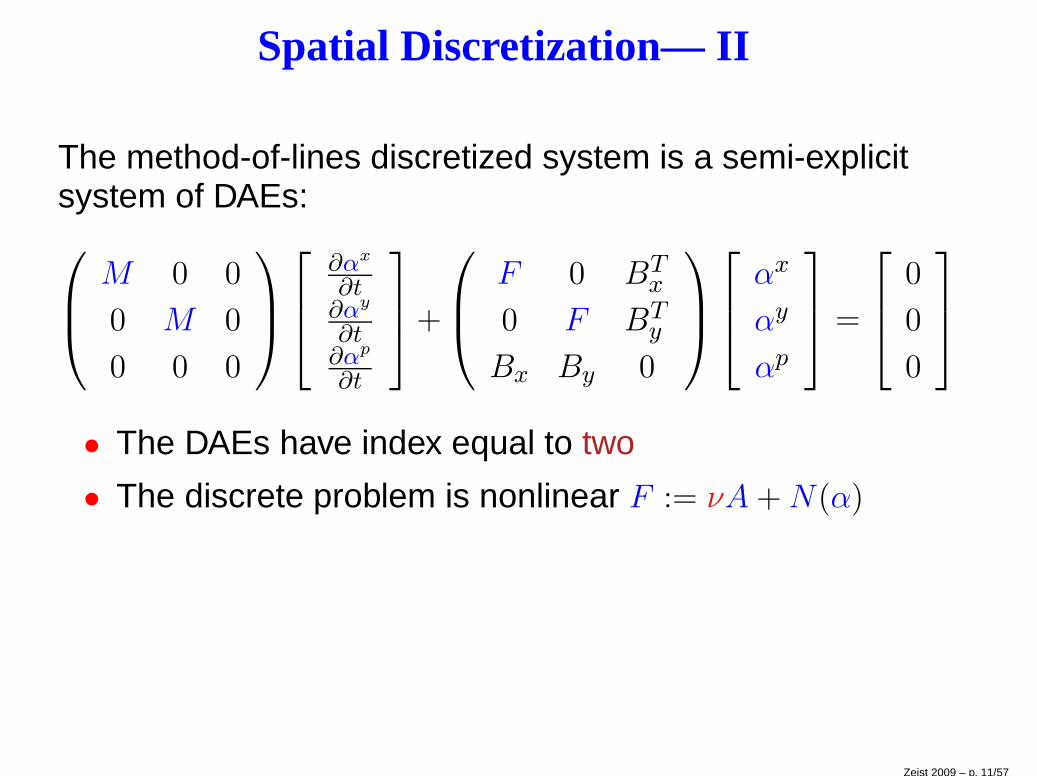
Spatial Discretization— II
The method-of-lines discretized system is a semi-explicitsystem of DAEs:
M 0 0
0 M 0
0 0 0
∂αx
∂t∂αy
∂t∂αp
∂t
+
F 0 BTx
0 F BTy
Bx By 0
αx
αy
αp
=
0
0
0
• The DAEs have index equal to two
• The discrete problem is nonlinear F := νA+N(α)
Zeist 2009 – p. 11/57
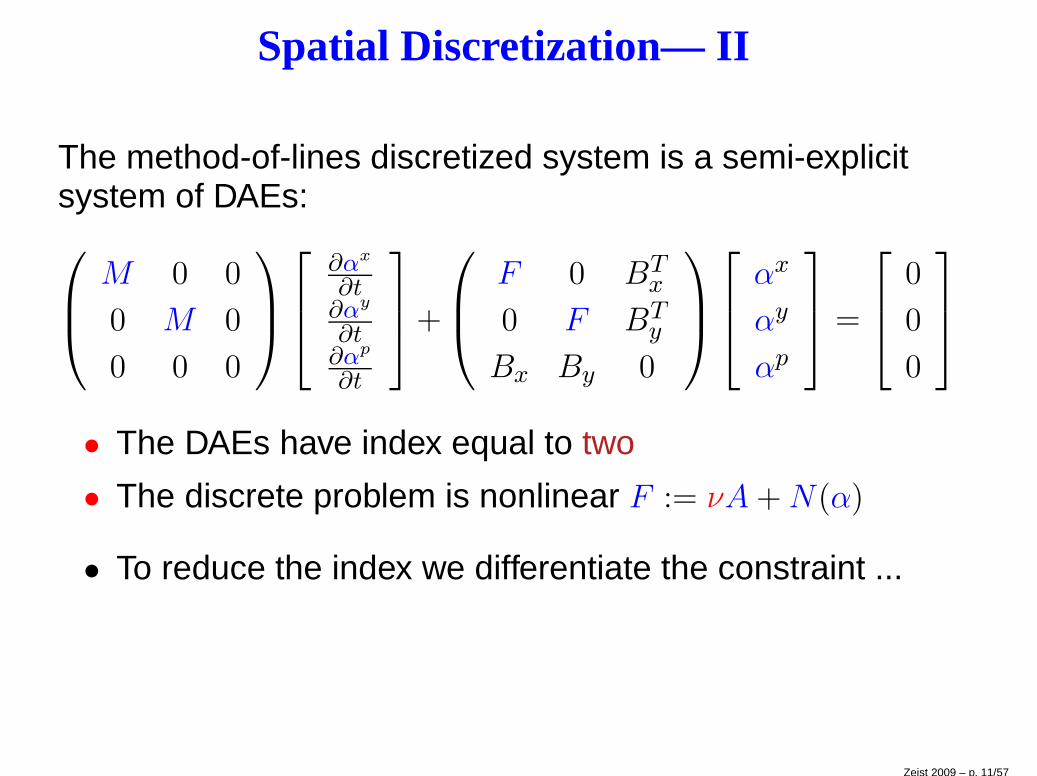
Spatial Discretization— II
The method-of-lines discretized system is a semi-explicitsystem of DAEs:
M 0 0
0 M 0
0 0 0
∂αx
∂t∂αy
∂t∂αp
∂t
+
F 0 BTx
0 F BTy
Bx By 0
αx
αy
αp
=
0
0
0
• The DAEs have index equal to two
• The discrete problem is nonlinear F := νA+N(α)
• To reduce the index we differentiate the constraint ...
Zeist 2009 – p. 11/57
Spatial Discretization— III
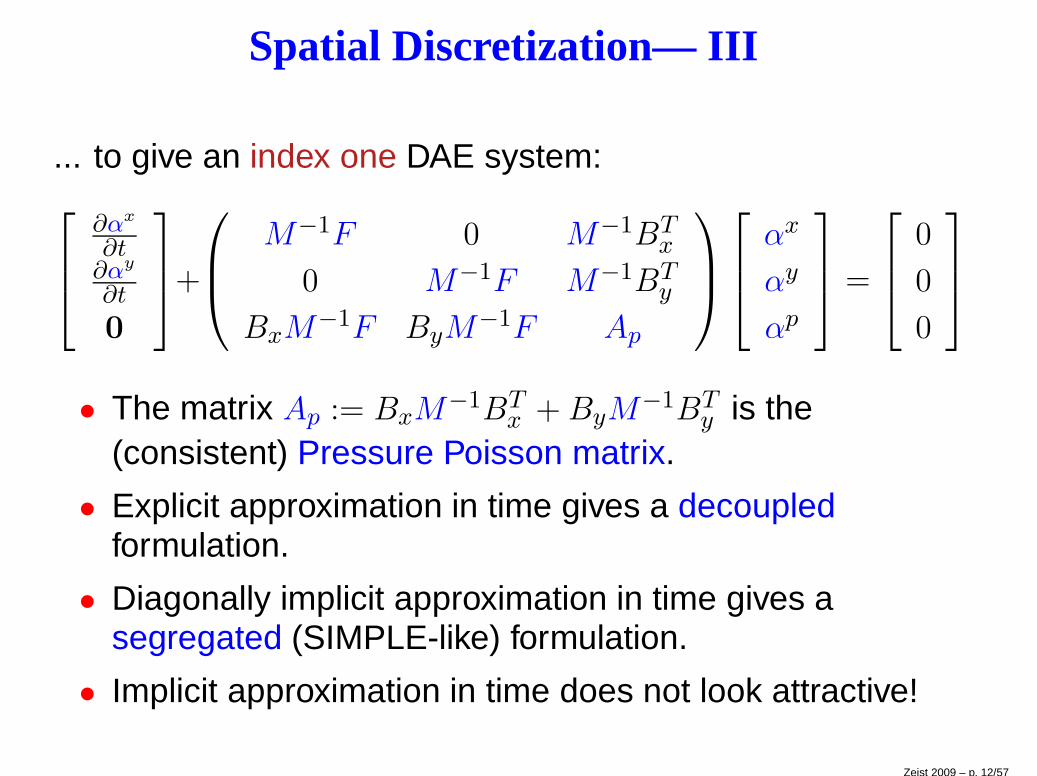
... to give an index one DAE system:
∂αx
∂t∂αy
∂t
0
+
M−1F 0 M−1BTx
0 M−1F M−1BTy
BxM−1F ByM
−1F Ap
αx
αy
αp
=
0
0
0
• The matrix Ap := BxM−1BT
x + ByM−1BT
y is the(consistent) Pressure Poisson matrix.
• Explicit approximation in time gives a decoupledformulation.
• Diagonally implicit approximation in time gives asegregated (SIMPLE-like) formulation.
• Implicit approximation in time does not look attractive!
Zeist 2009 – p. 12/57
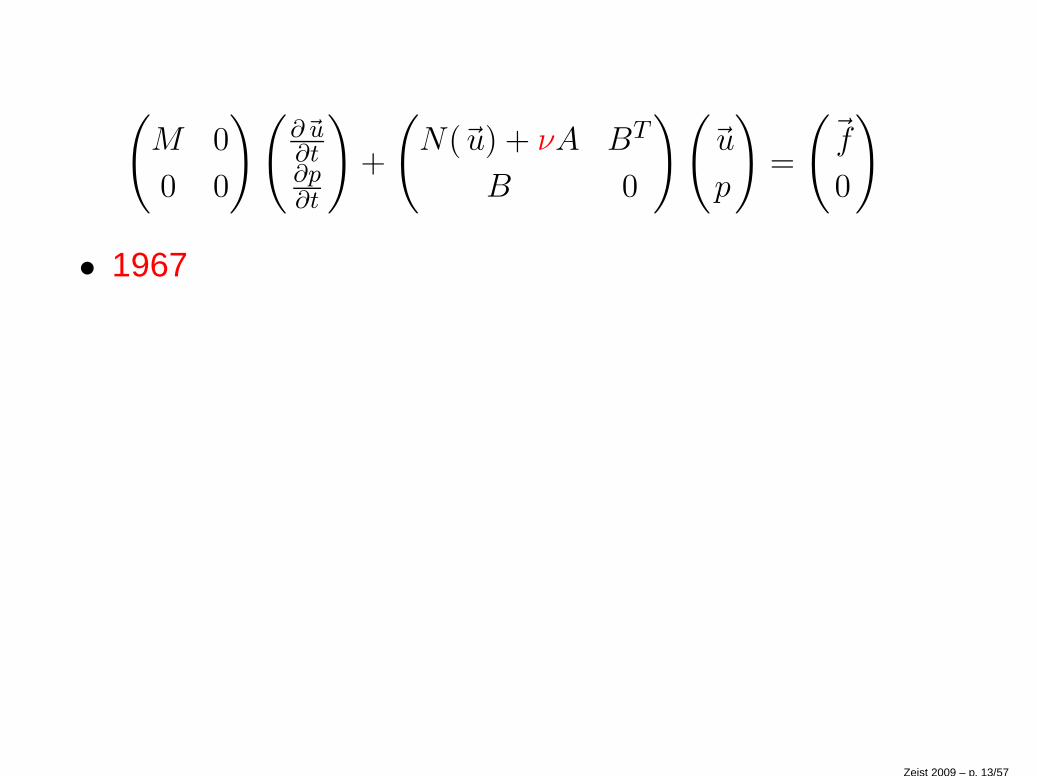
(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
N(~u) + νA BT
B 0
)(
~u
p
)
=
(~f
0
)
• 1967
Zeist 2009 – p. 13/57
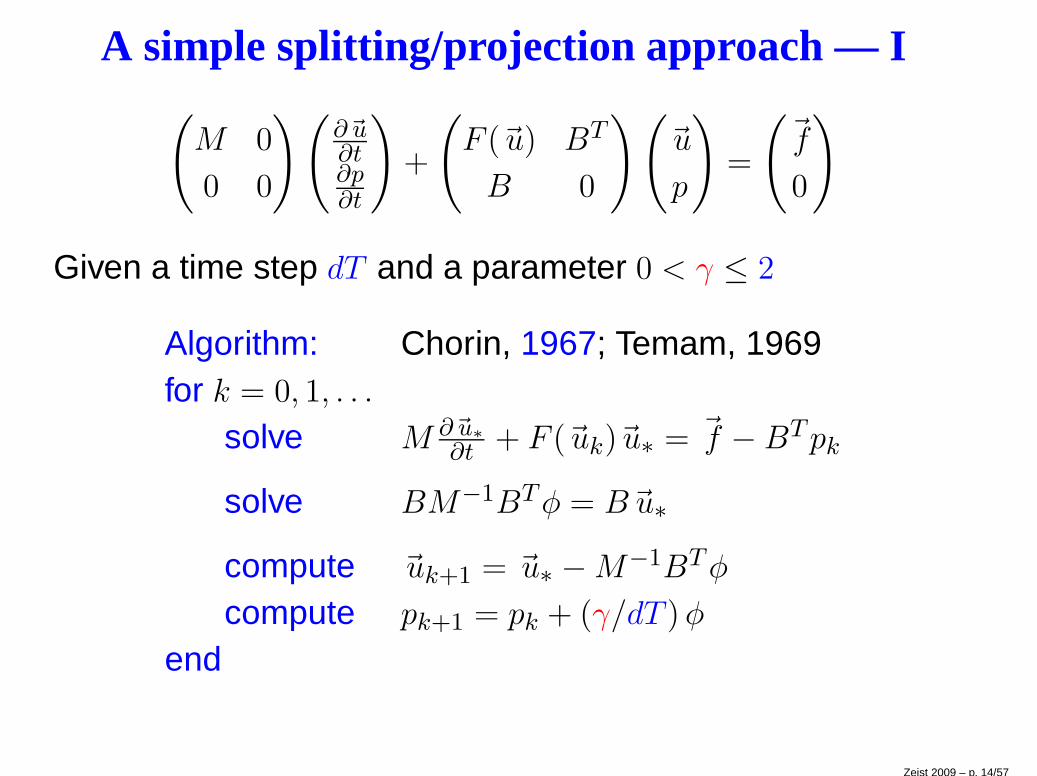
A simple splitting/projection approach — I(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
F (~u) BT
B 0
)(
~u
p
)
=
(~f
0
)
Given a time step dT and a parameter 0 < γ ≤ 2
Algorithm: Chorin, 1967; Temam, 1969for k = 0, 1, . . .
solve M ∂~u∗
∂t + F (~uk)~u∗ = ~f − BTpk
solve BM−1BTφ = B~u∗
compute ~uk+1 = ~u∗ −M−1BTφ
compute pk+1 = pk + (γ/dT )φ
end
Zeist 2009 – p. 14/57
A simple splitting/projection approach — II
Key Question: Is the projection/splitting consistent?
Zeist 2009 – p. 15/57
A simple splitting/projection approach — II
Key Question: Is the projection/splitting consistent?Practictioners say yes ...
• Chorin (1967), Temam(1969), Kim & Moin (1985), VanKan (1986), Bell, Colella & Glaz (1989), Gresho & Chan(1984, 1990), Perot (1993), Turek (1997).
Zeist 2009 – p. 15/57
A simple splitting/projection approach — II
Key Question: Is the projection/splitting consistent?Practictioners say yes ...
• Chorin (1967), Temam(1969), Kim & Moin (1985), VanKan (1986), Bell, Colella & Glaz (1989), Gresho & Chan(1984, 1990), Perot (1993), Turek (1997).
Mathematicians say sometimes ...
• Guermond (1984), Rannacher (1992), E & Liu (1995,1996), Shen (1992, 1996), Prohl (1997, 2007 ).
Zeist 2009 – p. 15/57
(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
N(~u) + νA BT
B 0
)(
~u
p
)
=
(~f
0
)
• 1967
• 1982
Zeist 2009 – p. 16/57
A Stokes splitting/projection approach — I(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
N(~u) + νA BT
B 0
)(
~u
p
)
=
(
0
0
)
Given a time step dT , discretise the total derivative:Algorithm: Pironneau, 1982; Hansbo, 1982for k = 0, 1, . . .
compute Xm(~x) the solution at τk = kdT of
dXdτ = ~uk(X, τ), X(τk+1) = ~x;
interpolate ~u∗k = ~uk(Xm(~x))
solve
(1
dTM + νA BT
B 0
)(
~uk+1
pk+1
)
=
(1
dTM~u∗k0
)
endZeist 2009 – p. 17/57
A simple splitting/projection approach — II
Key1 Question: Is the total derivative approximation stablenumerically ?
Zeist 2009 – p. 18/57
A simple splitting/projection approach — II
Key1 Question: Is the total derivative approximation stablenumerically ?Mathematicians say yes, but care is needed ...
• Hansbo (1982), Pironneau (1982), Morton, Priestley &Suli (1988,1989, 1994), Bermejo & Staniforth (1991,1992).
Zeist 2009 – p. 18/57
A simple splitting/projection approach — II
Key1 Question: Is the total derivative approximation stablenumerically ?Mathematicians say yes, but care is needed ...
• Hansbo (1982), Pironneau (1982), Morton, Priestley &Suli (1988,1989, 1994), Bermejo & Staniforth (1991,1992).
Key2 Question: Adaptive time stepping ?
Zeist 2009 – p. 18/57
(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
N(~u) + νA BT
B 0
)(
~u
p
)
=
(~f
0
)
• 1967
• 1982
• 1991
Zeist 2009 – p. 19/57
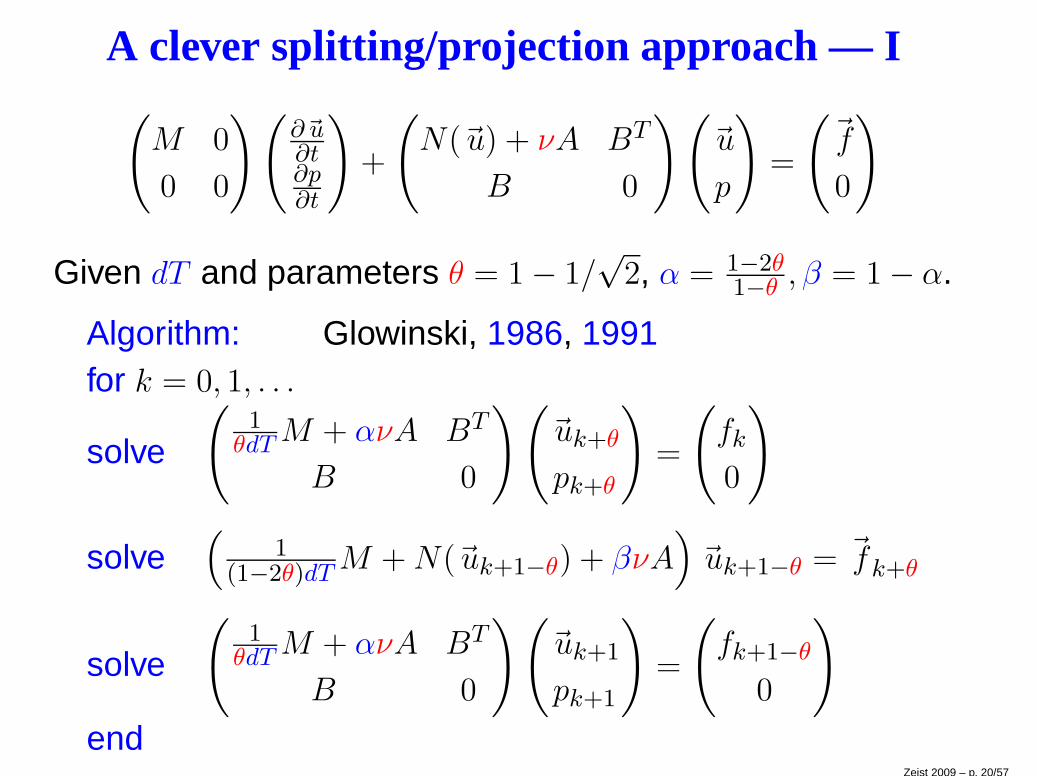
A clever splitting/projection approach — I(
M 0
0 0
)(∂~u∂t∂p∂t
)
+
(
N(~u) + νA BT
B 0
)(
~u
p
)
=
(~f
0
)
Given dT and parameters θ = 1 − 1/√
2, α = 1−2θ1−θ , β = 1 − α.
Algorithm: Glowinski, 1986, 1991for k = 0, 1, . . .
solve
(1
θdTM + ανA BT
B 0
)(
~uk+θ
pk+θ
)
=
(
fk
0
)
solve(
1(1−2θ)dTM +N(~uk+1−θ) + βνA
)
~uk+1−θ = ~fk+θ
solve
(1
θdTM + ανA BT
B 0
)(
~uk+1
pk+1
)
=
(
fk+1−θ
0
)
endZeist 2009 – p. 20/57
A clever splitting/projection approach — II
Key1 Question: Is the algorithm over-complicated?
Zeist 2009 – p. 21/57
A clever splitting/projection approach — II
Key1 Question: Is the algorithm over-complicated?Mathematicians say no, ...
• Glowinski & Dean (1984, 1993) , Bristeau et al. (1985),Rannacher (1989, 1990), Turek (1996), Smith &Silvester (1997).
Zeist 2009 – p. 21/57
A clever splitting/projection approach — II
Key1 Question: Is the algorithm over-complicated?Mathematicians say no, ...
• Glowinski & Dean (1984, 1993) , Bristeau et al. (1985),Rannacher (1989, 1990), Turek (1996), Smith &Silvester (1997).
Key2 Question: Adaptive time stepping ?
Zeist 2009 – p. 21/57
• Update : 2000 – 2009
Philip Gresho & David Griffiths & David SilvesterAdaptive time-stepping for incompressible flow; part I:scalar advection-diffusion, SIAM J. ScientificComputing, 30: 2018–2054, 2008.
David Kay & Philip Gresho & David Griffiths & DavidSilvester Adaptive time-stepping for incompressibleflow; part II: Navier-Stokes equations. MIMS Eprint2008.61.
Zeist 2009 – p. 22/57
“Smart Integrator” (SI) definition
• Optimal time-stepping: time-steps automatically chosento “follow the physics”.
• Black-box implementation: few parameters that have tobe estimated a priori.
Zeist 2009 – p. 23/57
“Smart Integrator” (SI) definition
• Optimal time-stepping: time-steps automatically chosento “follow the physics”.
• Black-box implementation: few parameters that have tobe estimated a priori.
• Solver efficiency: the linear solver convergence rate isrobust with respect to the mesh size h and the Reynoldsnumber 1/ν.
Zeist 2009 – p. 23/57
Trapezoidal Rule (TR) time discretization
We subdivide [0, T ] into time levels tiNi=1. Given (~un, pn) at
time level tn, kn+1 := tn+1 − tn, compute (~un+1, pn+1) via
2kn+1
~un+1 + ~wn+1 · ∇~un+1− ν∇2~un+1 + ∇pn+1 = ~fn+1
−∇ · ~un+1 = 0 in Ω
~un+1 = ~gn+1 on ΓD
ν∇~un+1 · ~n− pn+1~n = ~0 on ΓN
with second-order linearization
~fn+1
= 2kn+1
~un + ν∇2~un − ~un · ∇~un −∇pn
~wn+1 = (1 + kn+1
kn)~un − kn+1
kn~un−1
Zeist 2009 – p. 24/57
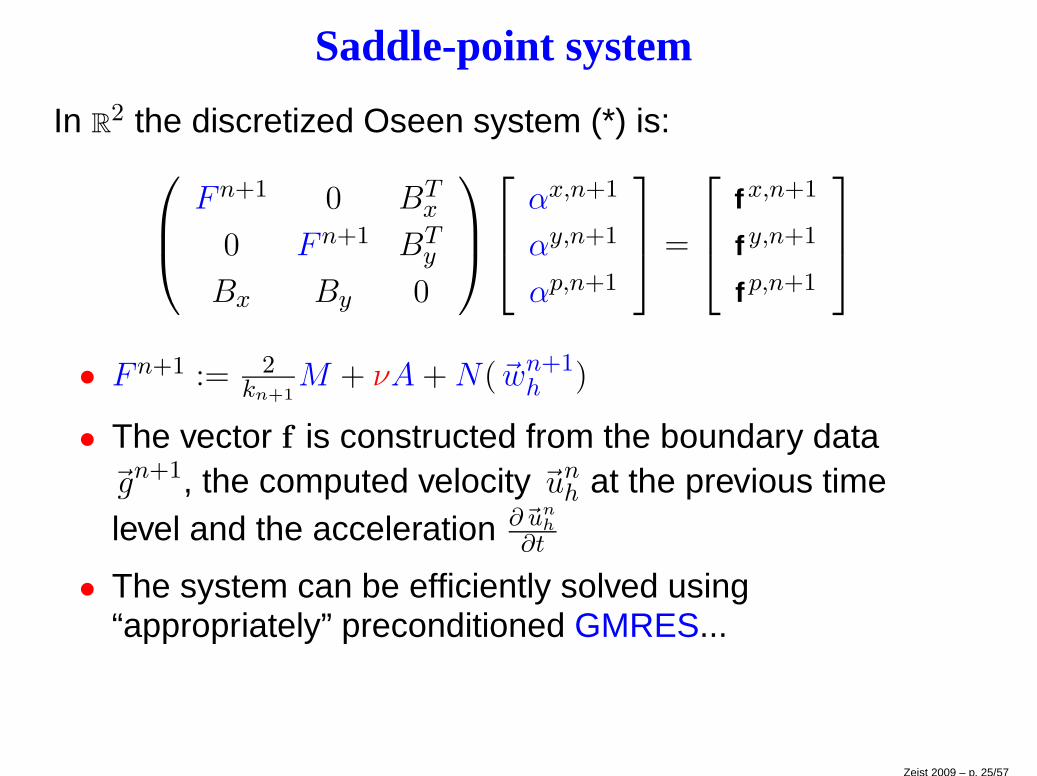
Saddle-point system
In R2 the discretized Oseen system (*) is:
Fn+1 0 BTx
0 Fn+1 BTy
Bx By 0
αx,n+1
αy,n+1
αp,n+1
=
f x,n+1
f y,n+1
f p,n+1
• Fn+1 := 2kn+1
M + νA+N(~wn+1h )
• The vector f is constructed from the boundary data~gn+1, the computed velocity ~un
h at the previous timelevel and the acceleration ∂~un
h
∂t
• The system can be efficiently solved using“appropriately” preconditioned GMRES...
Zeist 2009 – p. 25/57
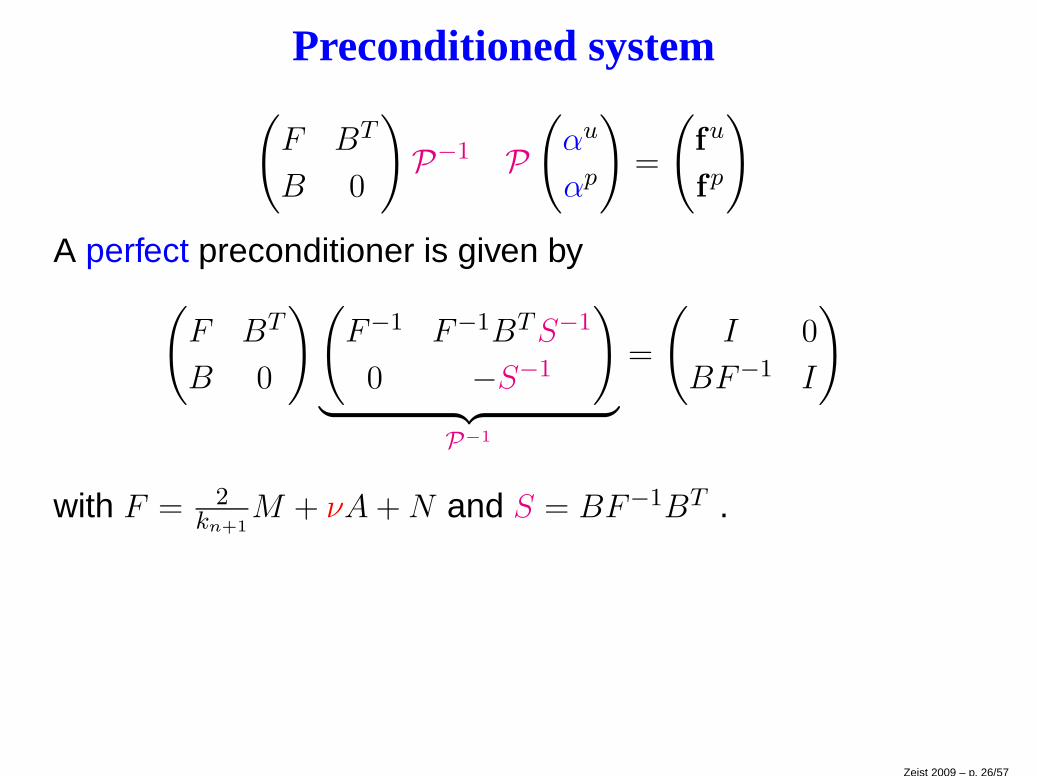
Preconditioned system(
F BT
B 0
)
P−1 P(
αu
αp
)
=
(
fu
fp
)
A perfect preconditioner is given by(
F BT
B 0
)(
F−1 F−1BTS−1
0 −S−1
)
︸ ︷︷ ︸
P−1
=
(
I 0
BF−1 I
)
with F = 2kn+1
M + νA+N and S = BF−1BT .
Zeist 2009 – p. 26/57
For an efficient preconditioner we need to construct asparse approximation to the “exact” Schur complement
S−1 = (BF−1BT )−1
See Chapter 8 of
• Howard Elman & David Silvester & Andrew WathenFinite Elements and Fast Iterative Solvers: withapplications in incompressible fluid dynamicsOxford University Press, 2005.
Two possible constructions ...
Zeist 2009 – p. 27/57
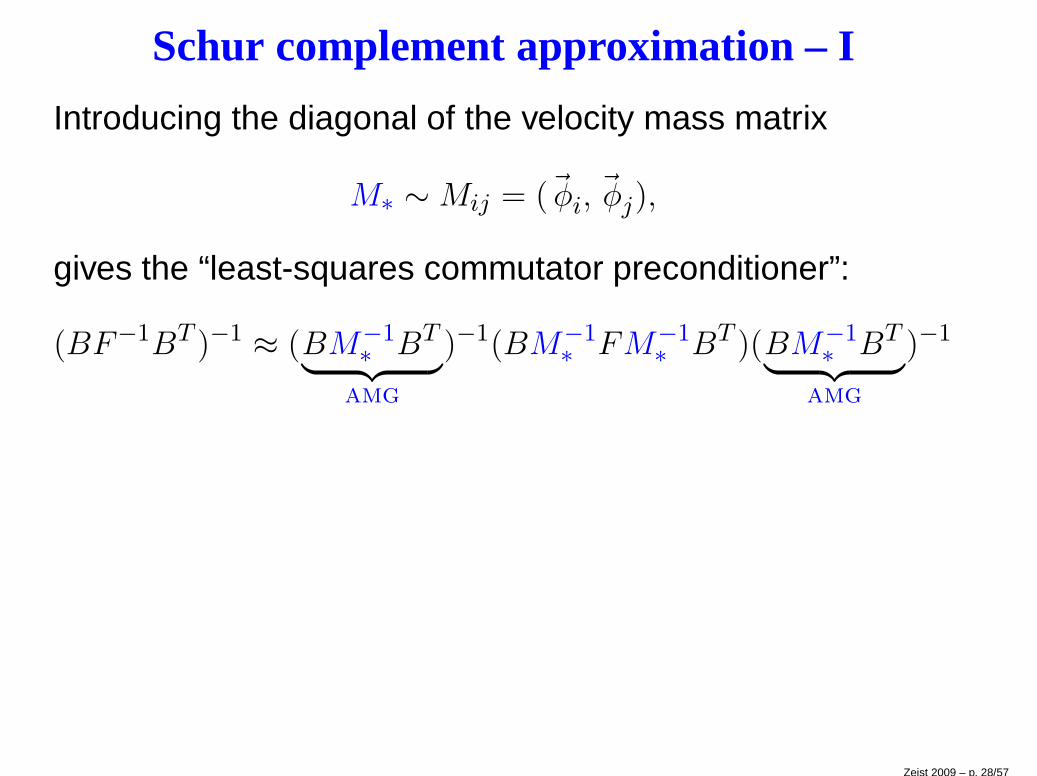
Schur complement approximation – I
Introducing the diagonal of the velocity mass matrix
M∗ ∼Mij = (~φi, ~φj),
gives the “least-squares commutator preconditioner”:
(BF−1BT )−1 ≈ (BM−1∗ BT
︸ ︷︷ ︸
amg
)−1(BM−1∗ FM−1
∗ BT )(BM−1∗ BT
︸ ︷︷ ︸
amg
)−1
Zeist 2009 – p. 28/57
Schur complement approximation – II
Introducing associated pressure matrices
Mp ∼ (∇ψi,∇ψj), mass
Ap ∼ (∇ψi,∇ψj), diffusion
Np ∼ (~wh · ∇ψi, ψj), convection
Fp =2
kn+1Mp + νAp +Np, convection-diffusion
gives the “pressure convection-diffusion preconditioner”:
(BF−1BT )−1 ≈M−1p Fp A
−1p︸︷︷︸
amg
Zeist 2009 – p. 29/57
Adaptive Time Stepping AB2–TR
Consider the simple ODE u = f(u)Manipulating the truncation error terms for TR and AB2gives the estimate
Tn =un+1 − u∗n+1
3(1 + kn
kn+1)
Given some user-prescribed error tolerance tol, the newtime step is selected to be the biggest possible such that‖Tn+1‖ ≤ tol× umax. This criterion leads to
kn+2 := kn+1
(tol× umax
‖Tn‖
)1/3
Zeist 2009 – p. 30/57
Adaptive Time Stepping AB2–TR
Consider the simple ODE u = f(u)Manipulating the truncation error terms for TR and AB2gives the estimate
Tn =un+1 − u∗n+1
3(1 + kn
kn+1)
Given some user-prescribed error tolerance tol, the newtime step is selected to be the biggest possible such that‖Tn+1‖ ≤ tol× umax. This criterion leads to
kn+2 := kn+1
(tol× umax
‖Tn‖
)1/3
But look out for “ringing” ...
Zeist 2009 – p. 30/57
Stabilized AB2–TR
To address the instability issues:
We rewrite the AB2–TR algorithm to compute updatesvn and wn scaled by the time-step:
un+1 − un = 1
2kn+1vn; u∗n+1 − u∗n = kn+1wn.
We perform time-step averaging every n∗ steps:
un := 1
2(un +un−1); un+1 := un + 1
4kn+1vn; un+1 := 1
2vn.
Contrast this with the standard acceleration obtained by“inverting” the TR formula:
un+1 = 2kn+1
(un+1 − un) − un = vn − un
Zeist 2009 – p. 31/57
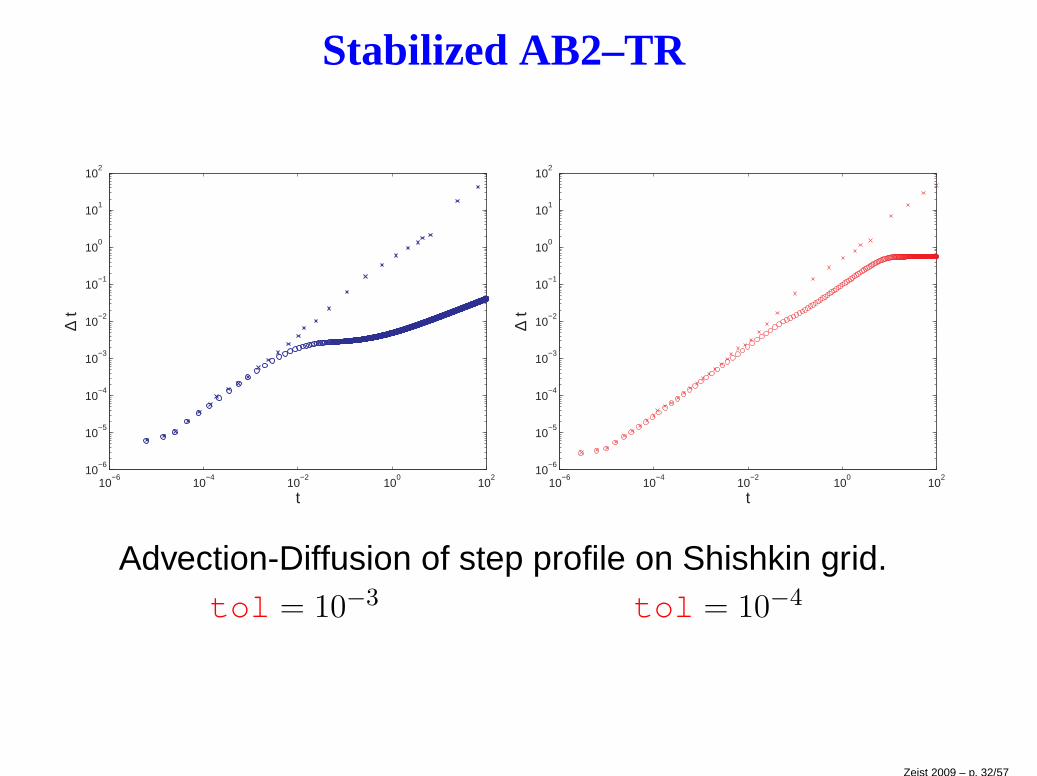
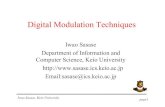
Stabilized AB2–TR
10−6
10−4
10−2
100
102
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
∆ t
t10
−610
−410
−210
010
210
−6
10−5
10−4
10−3
10−2
10−1
100
101
102
∆ t
t
Advection-Diffusion of step profile on Shishkin grid.tol = 10−3 tol = 10−4
Zeist 2009 – p. 32/57
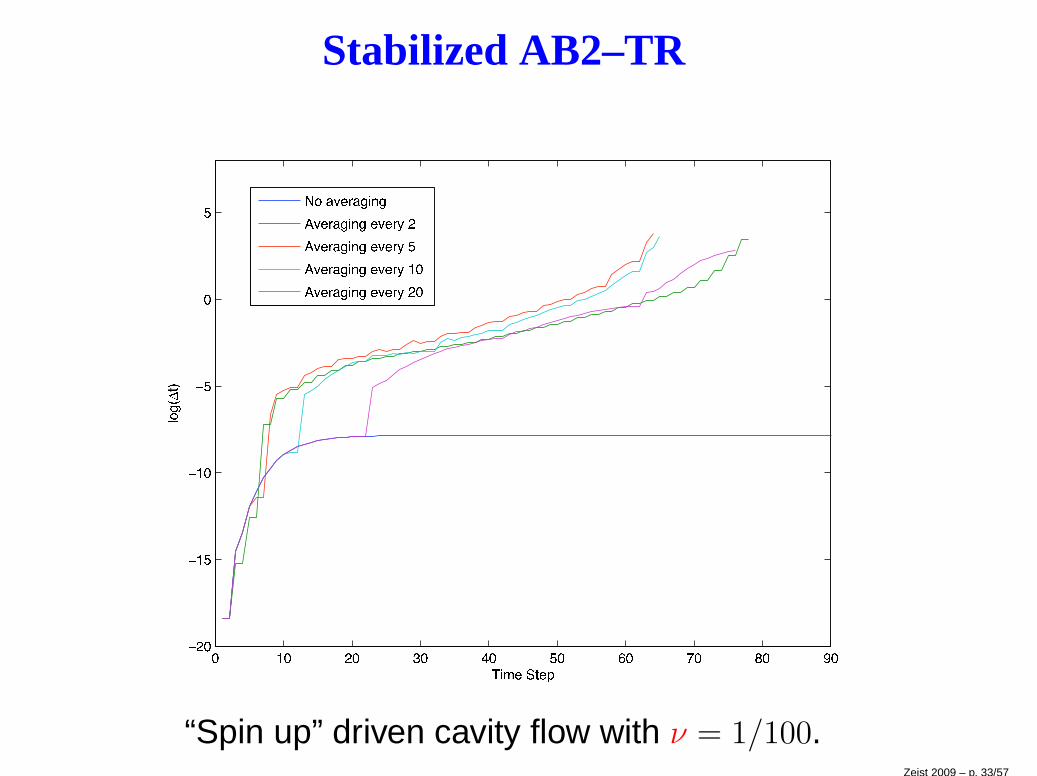
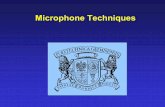
Stabilized AB2–TR
“Spin up” driven cavity flow with ν = 1/100.Zeist 2009 – p. 33/57
Adaptive Time-Stepping Algorithm I
• The following parameters must be specified:
time accuracy tolerance tol (10−4)
GMRES tolerance itol (10−6)
GMRES iteration limit maxit (50)
Zeist 2009 – p. 34/57
Adaptive Time-Stepping Algorithm I
• The following parameters must be specified:
time accuracy tolerance tol (10−4)
GMRES tolerance itol (10−6)
GMRES iteration limit maxit (50)
• Starting from rest, ~u0 = ~0, and given a steady stateboundary condition ~u(~x, t) = ~g, we model the impulsewith a time-dependent boundary condition:
~u(~x, t) = ~g(1 − e−5t) on ΓD × [0, T ].
Zeist 2009 – p. 34/57
Adaptive Time-Stepping Algorithm I
• The following parameters must be specified:
time accuracy tolerance tol (10−4)
GMRES tolerance itol (10−6)
GMRES iteration limit maxit (50)
• Starting from rest, ~u0 = ~0, and given a steady stateboundary condition ~u(~x, t) = ~g, we model the impulsewith a time-dependent boundary condition:
~u(~x, t) = ~g(1 − e−5t) on ΓD × [0, T ].
• We specify the frequency of averaging, typicallyn∗ = 10. We also choose a very small initial timestep,typically, k1 = 10−8.
Zeist 2009 – p. 34/57
Adaptive Time-Stepping Algorithm II
Setup the Oseen System (∗) and compute[αx,n+1, αy,n+1] using GMRES(maxit, itol).
Zeist 2009 – p. 35/57
Adaptive Time-Stepping Algorithm II
Setup the Oseen System (∗) and compute[αx,n+1, αy,n+1] using GMRES(maxit, itol).
Compute the LTE estimate ev,n+1
Zeist 2009 – p. 35/57
Adaptive Time-Stepping Algorithm II
Setup the Oseen System (∗) and compute[αx,n+1, αy,n+1] using GMRES(maxit, itol).
Compute the LTE estimate ev,n+1
If ‖ev,n+1‖ > (1/0.7)3tol, we reject the current time step,and repeat the old time step with
kn+1 = kn+1(tol
‖ev,n+1‖ )1/3.
Zeist 2009 – p. 35/57
Adaptive Time-Stepping Algorithm II
Setup the Oseen System (∗) and compute[αx,n+1, αy,n+1] using GMRES(maxit, itol).
Compute the LTE estimate ev,n+1
If ‖ev,n+1‖ > (1/0.7)3tol, we reject the current time step,and repeat the old time step with
kn+1 = kn+1(tol
‖ev,n+1‖ )1/3.
Otherwise, accept the step and continue with n = n+ 1and kn+2 based on the LTE estimate and the accuracytolerance tol.
Zeist 2009 – p. 35/57
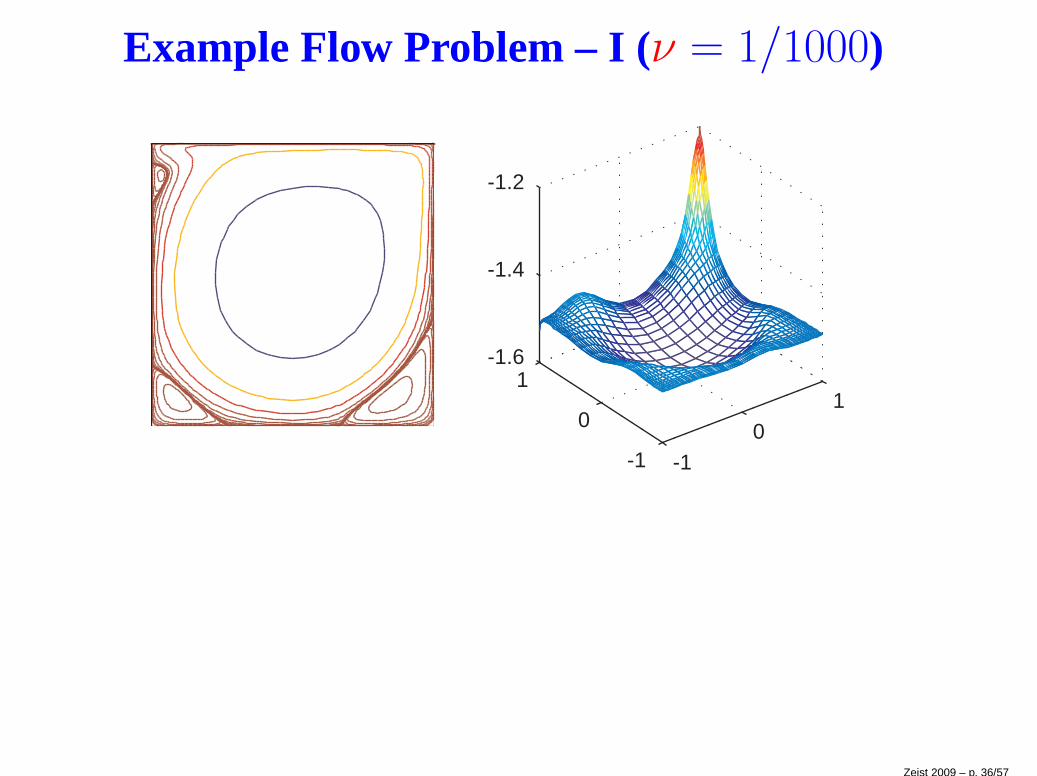
Example Flow Problem – I (ν = 1/1000)
-10
1
-1
0
1-1.6
-1.4
-1.2
Zeist 2009 – p. 36/57
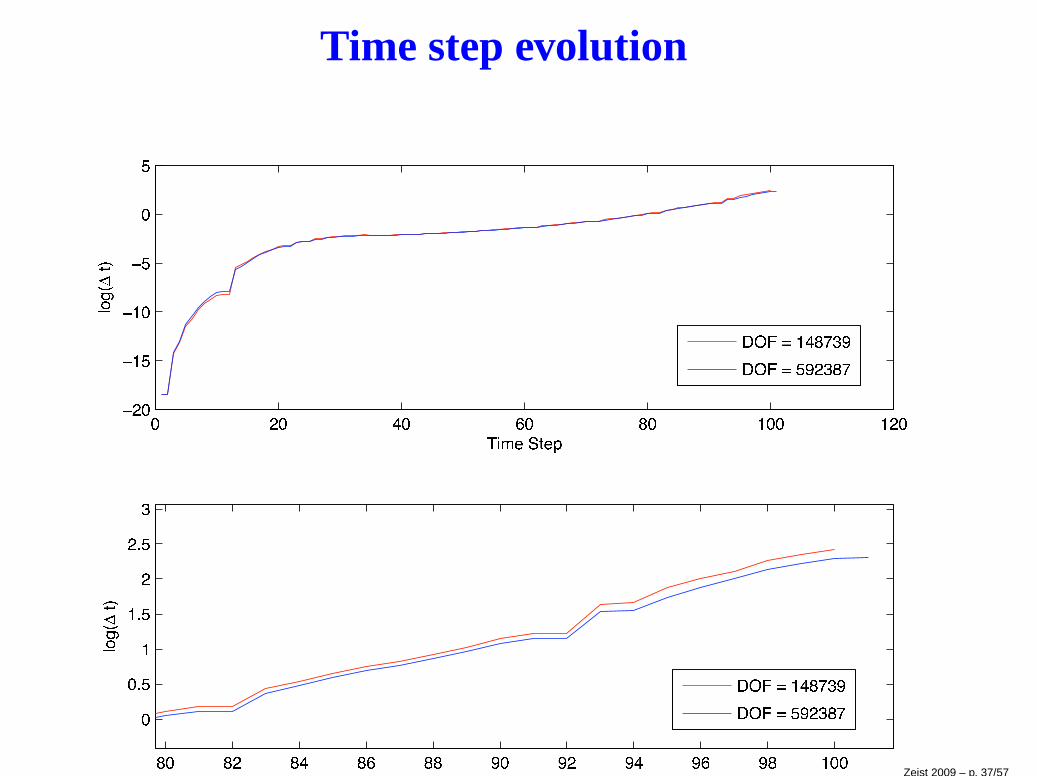
Time step evolution
Zeist 2009 – p. 37/57
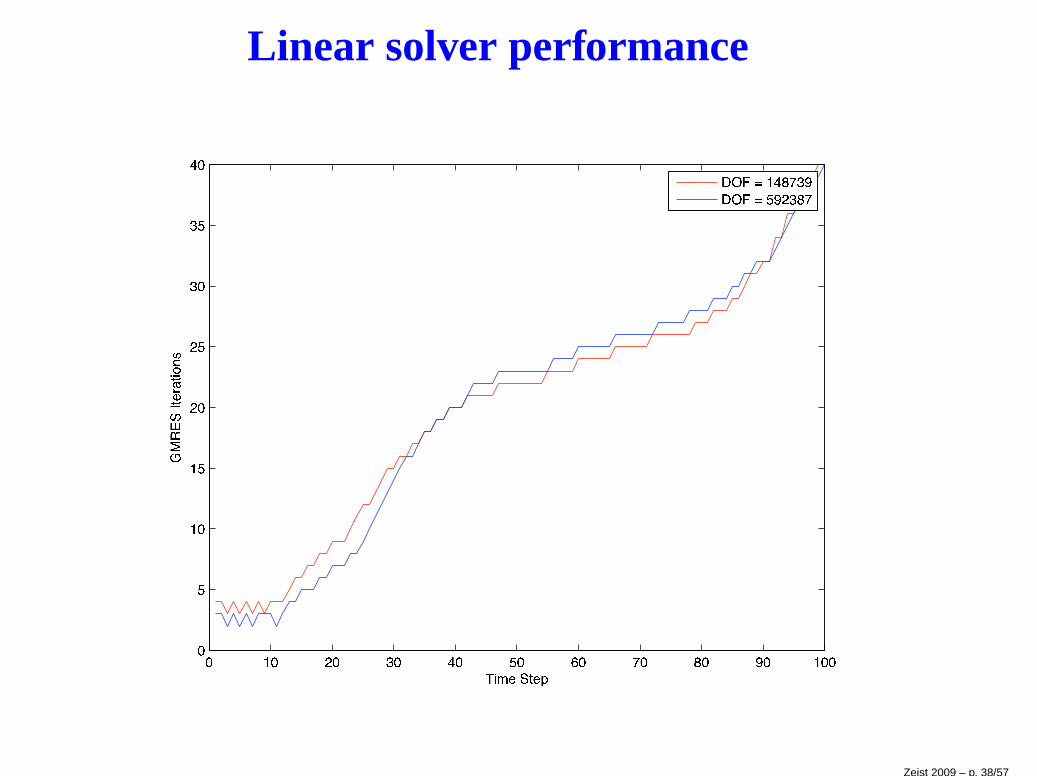
Linear solver performance
Zeist 2009 – p. 38/57
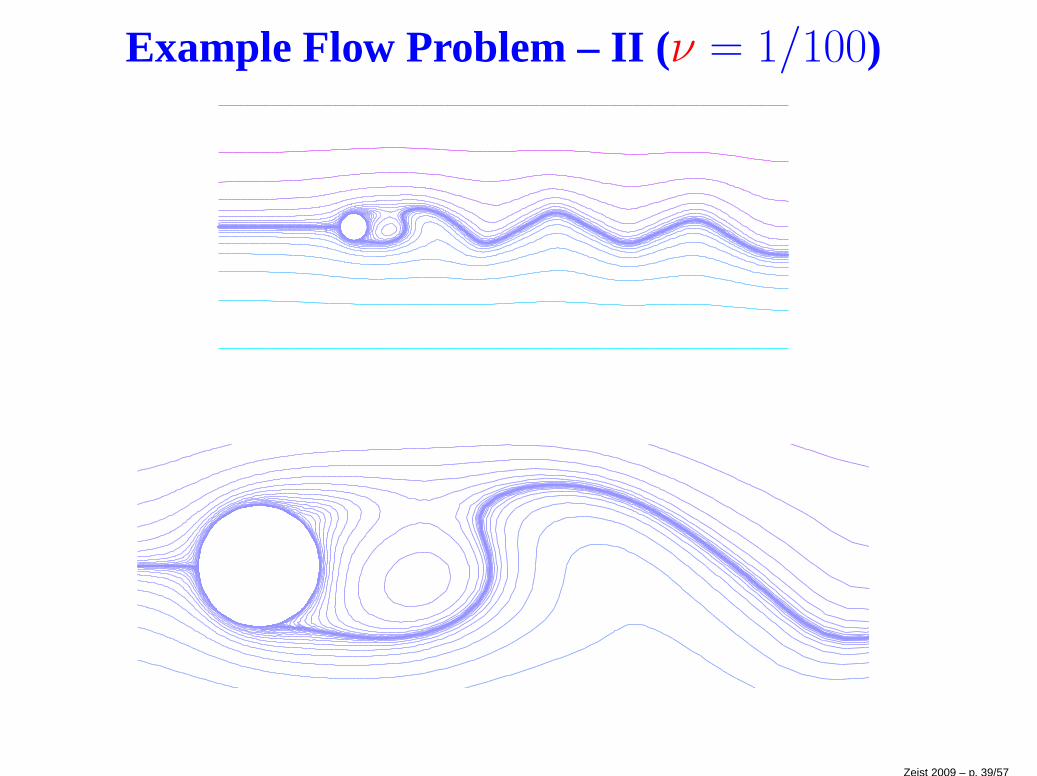
Example Flow Problem – II (ν = 1/100)
Zeist 2009 – p. 39/57
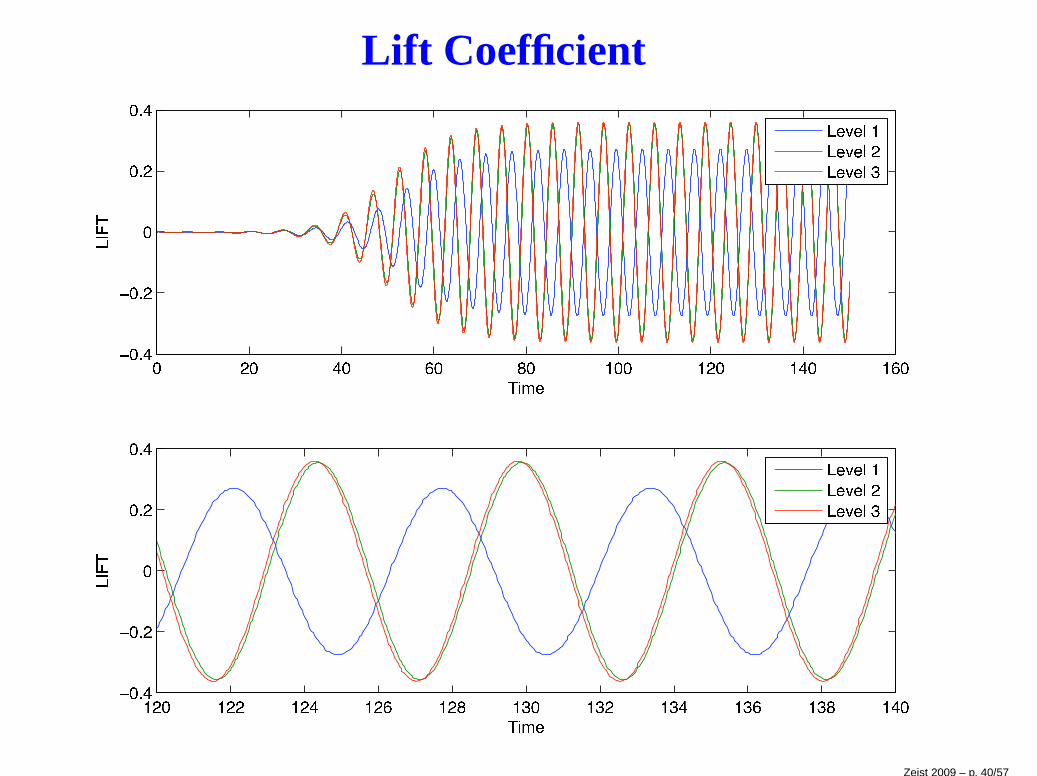
Lift Coefficient
Zeist 2009 – p. 40/57

Time step evolution
Zeist 2009 – p. 41/57
Bouyancy driven flow
∂~u
∂t+ ~u · ∇~u− ν∇2~u+ ∇p = ~jT in W ≡ Ω × (0, T )
∇ · ~u = 0 in W∂T
∂t+ ~u · ∇T − ν∇2T = 0 in W
Boundary and Initial conditions
~u = ~0 on Γ × [0, T ]; ~u(~x, 0) = ~0 in Ω.
T = Tg on ΓD × [0, T ]; ν∇T · ~n = 0 on ΓN × [0, T ];
T (~x, 0) = T0(~x) in Ω.
Zeist 2009 – p. 42/57
Finite element matrix formulation
Introducing the basis sets
Xh = span~φinu
i=1, Velocity basis functions;
Mh = spanψjnp
j=1, Pressure basis functions.
Th = spanφknT
k=1, Temperature basis functions;
gives the method-of-lines discretized system:
M 0 0
0 0 0
0 0 M
∂~u∂t∂p∂t∂T∂t
+
F BT − M
B 0 0
0 0 F
~u
p
T
=
~0
0
g
with a (vertical–) mass matrix:
(M
)ij = ([0, φi], φj)
Zeist 2009 – p. 43/57
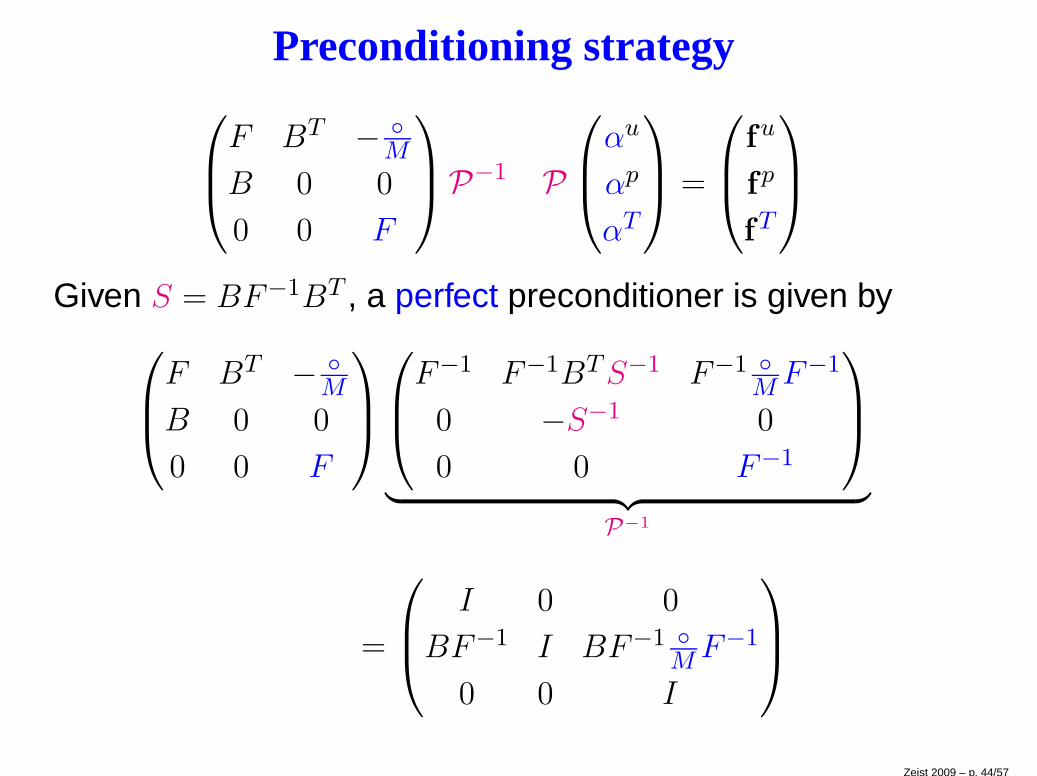
Preconditioning strategy
F BT − M
B 0 0
0 0 F
P−1 P
αu
αp
αT
=
fu
fp
fT
Given S = BF−1BT , a perfect preconditioner is given by
F BT − M
B 0 0
0 0 F
F−1 F−1BTS−1 F−1 MF−1
0 −S−1 0
0 0 F−1
︸ ︷︷ ︸
P−1
=
I 0 0
BF−1 I BF−1 MF−1
0 0 I
Zeist 2009 – p. 44/57
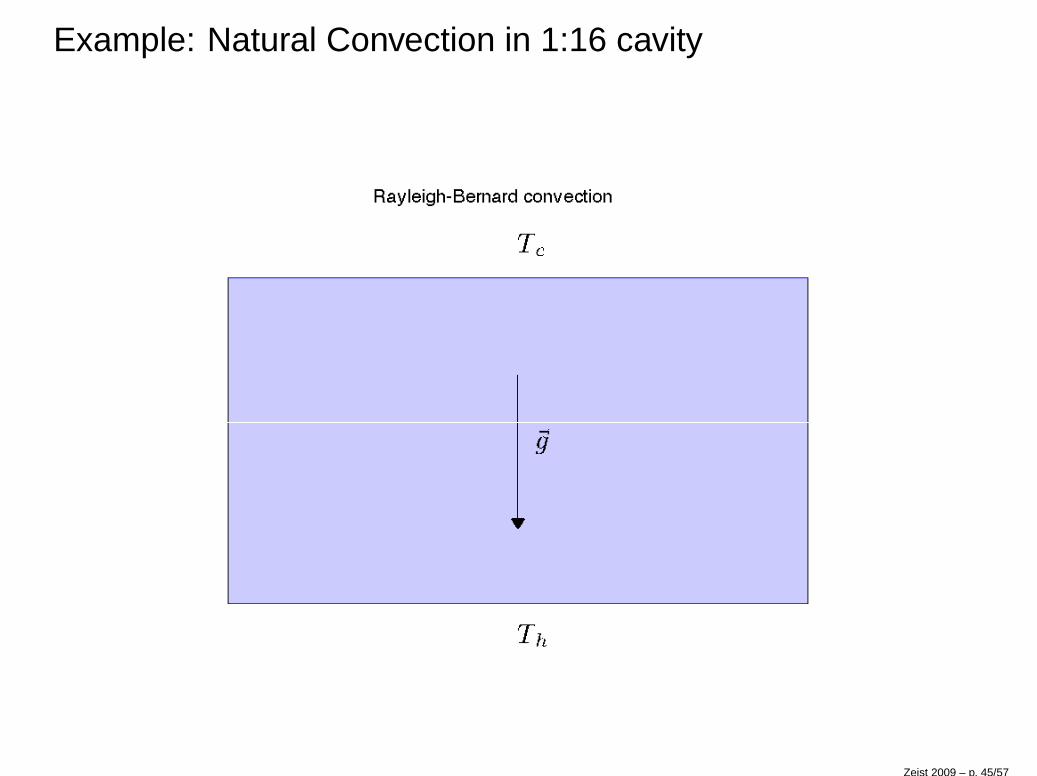
Example: Natural Convection in 1:16 cavity
Zeist 2009 – p. 45/57
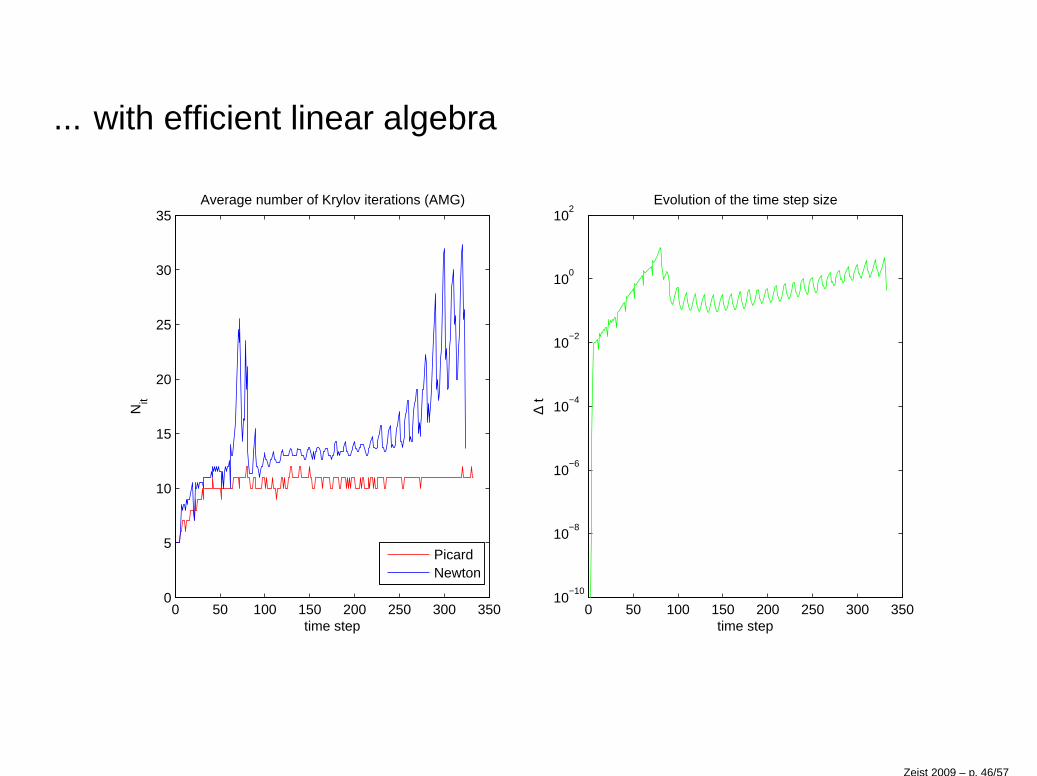
... with efficient linear algebra
0 50 100 150 200 250 300 3500
5
10
15
20
25
30
35
time step
Nit
Average number of Krylov iterations (AMG)
PicardNewton
0 50 100 150 200 250 300 35010
−10
10−8
10−6
10−4
10−2
100
102
time step
∆ t
Evolution of the time step size
Zeist 2009 – p. 46/57
What have we achieved?
• Black-box implementation: few parameters that have tobe estimated a priori.
• Optimal complexity: essentially O(n) flops per iteration,where n is dimension of the discrete system.
• Efficient linear algebra: convergence rate is (essentially)independent of h. Given an appropriate time accuracytolerance convergence is also robust with respect to ν
Zeist 2009 – p. 47/57
ReferencesSemi-Implicit, Fractional-Step, Pressure Projection — I
• A.J. ChorinA numerical method for solving incompressible viscousflow problems, J. Comput. Phys., 2:12–26, 1967.
• J. Kim & P. MoinApplication of a fractional–step method toincompressible Navier–Stokes equations,J. Comput. Phys., 59:308–323, 1985.
• J. Van KanA second–order accurate pressure–correction schemefor viscous incompressible flow,SIAM J. Sci. Stat. Comput., 7(3):870–891, 1986.
• J.B. Bell, P. Colella & H.M. GlazA second–order projection method for theincompressible Navier–Stokes equations,J. Comput. Phys., 85:(2)257–283, 1989.
Zeist 2009 – p. 48/57
Semi-Implicit, Fractional-Step, Pressure Projection — II
• P.M. Gresho, S.T. Chan, R.L. Lee & C.D. UpsonA modified finite element method for solving thetime–dependent, incompressible Navier–Stokesequations. Part 1: Theory,Int. J. Numer. Meth. Fluids, 4:557–598, 1984.
• P.M. Gresho & S.T. ChanOn the theory of semi–implicit projection methods forviscous incompressible flow and its implementation viaa finite element method that also introduces a nearlyconsistent mass matrix. Part 2: Implementation,Int. J. Numer. Meth. Fluids, 11(5):621-660, 1990.
• J.B. PerotAn analysis of the fractional step method,J. Comput. Phys., 108:51–58, 1993.
Zeist 2009 – p. 49/57
Semi-Implicit, Fractional-Step, Pressure Projection — III
• J.–L. GuermondSur l’approximation des équations de Navier–Stokesinstationnaires par une méthode de projection, C.R.Acad. Sci. Paris, 319:887–892, 1994. Serie I.
• R. RannacherThe Navier–Stokes Equations II: Theory and NumericalMethods, Springer–Verlag, Berlin, Germany, 1992.Chap.On Chorin’s projection method for theincompressible Navier–Stokes equations; pp. 167–183;Lecture Notes in Mathematics, Vol. 1530.
Zeist 2009 – p. 50/57
Semi-Implicit, Fractional-Step, Pressure Projection — IV
• W. E & J.–G. LiuProjection method I: Convergence and numericalboundary layers,SIAM J. Numer. Anal., 32(4):1017–1057, 1995.
• W. E & J.–G. LiuVorticity boundary conditions and related issues forfinite difference schemes,J. Comput. Phys., 124:368–382, 1996.
Zeist 2009 – p. 51/57
Semi-Implicit, Fractional-Step, Pressure Projection — V
• J. ShenOn error estimates of some higher order projection andpenalty–projection methods for Navier–Stokesequations, Numer. Math., 62:49–73, 1992.
• J. ShenOn error estimates of the projection methods for theNavier–Stokes equations: Second–order schemes,Math. Comput., 65, 215:1039–1065, 1996.
• A. ProhlAnalysis of Chorin’s projection method for solving theincompressible Navier–Stokes equations, UniversitätHeidelberg, Institut für Angewandte Mathematik, INF294, D–69120 Heidelberg, Germany, 1996.
Zeist 2009 – p. 52/57
Transport Diffusion, Lagrange-Galerkin, Backward Methodof Characteristics — I
• P. HansboThe characteristic streamline diffusion method for thetime–dependent incompressible Navier–Stokesequations, Comput. Meth. Appl. Mech. Eng.,99:171–186, 1992.
• O. PironneauOn the transport–diffusion algorithm and its applicationto the Navier–Stokes equations, Numer. Math.,38:309–332, 1982.
• K.W. Morton, A. Priestley & E. SüliStability of the Lagrange–Galerkin method withnon–exact integration,Math. Model. Numer. Anal., 22:(4)625–653, 1988.
Zeist 2009 – p. 53/57
Transport Diffusion, Lagrange-Galerkin, Backward Methodof Characteristics — II
• A. PriestleyExact projections and the Lagrange–Galerkin method:A realistic alternative to quadrature, J. Comput. Phys.,112:316–333, 1994
• R. BermejoAnalysis of an algorithm for the Galerkin–characteristicmethod, Numer. Math., 60:163–194, 1991.
Zeist 2009 – p. 54/57
Fractional Step, le Θ scheme — I
• M.O. Bristeau, R. Glowinski, B. Mantel,J. Periaux & P. Perrier, Numerical methods forincompressible and compressible Navier–Stokesproblems, Finite Elements in Fluids 6 (R.H. Gallagher,G. Carey, J.T. Oden & O.C. Zienkiewicz, eds),Chichester: Wiley, 1985. pp. 1–40.
• E.J. Dean & R. GlowinskiOn some finite element methods for the numericalsimulation of incompressible viscous flow,Incompressible Computational Fluid Dynamics., (M.D.Gunzburger & R.A. Nicolaides, eds), CambridgeUniversity Press, 1993. pp. 17–65.
Zeist 2009 – p. 55/57
Fractional Step, le Θ scheme — II
• R. RannacherApplications of mathematics in industry and technology,B.G. Teubner, Stuttgart, Germany, 1989. Chap.Numerical analysis of nonstationary fluid flow (asurvey); pp. 34–53; (V.C. Boffi & H. Neunzert, eds).
• R. RannacherNavier–Stokes equations: theory and numericalmethods, Springer–Verlag, Berlin, Germany, 1990.Chap. On the numerical analysis of the non–stationaryNavier–Stokes equations; pp. 180–193; (J. Heywood etal., eds).
Zeist 2009 – p. 56/57
Fractional Step, le Θ scheme — III
• S. TurekA comparative study of some time–stepping techniquesfor the incompressible Navier–Stokes equations: Fromfully implicit nonlinear schemes to semi–implicitprojection methods, Int. J. Numer. Meth. Fluids,22(10):987–1012, 1996.
• A. Smith & D.J. SilvesterImplicit algorithms and their linearization for thetransient incompressible Navier–Stokes equations,IMA J. Numer. Anal. 17: 527–545, 1997.
Zeist 2009 – p. 57/57