a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface...
36
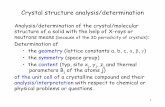
5.4. SUMMARY 81 0 0.001 0.002 0.003 0.004 0.005 0.006 0 20 40 60 80 100 120 140 160 180 crack tip void position on ligament σ yy [Pa] [μm] load: 60 · KI /K ref I load: 120 · KI /K ref I Figure 5.5: Asymptotic behaviour of stress component σ yy along ligament for both discretizations and different mixtures at load level 60 and 120 to elastic solutions. Additionally two void positions near the ligament. coarse fine grain structure p G ij G ij 3.0 9.0 Figure 5.6: Geometrically Necessary Dislocations at load 120 · K I /K ref I
Transcript of a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface...
![Page 1: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/1.jpg)
5.4. SUMMARY 81
0
0.001
0.002
0.003
0.004
0.005
0.006
0 20 40 60 80 100 120 140 160 180
crack tip void position on ligament
σyy
[Pa]
[µm ]
load: 60 ·KI/KrefI
load: 120 ·KI/KrefI
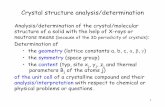
Figure 5.5: Asymptotic behaviour of stress component σyy along ligament for
both discretizations and different mixtures at load level 60 and 120 to elastic
solutions. Additionally two void positions near the ligament.
coarse fine grain structure
√GijGij
3.0
9.0
Figure 5.6: Geometrically Necessary Dislocations at load 120 ·KI/KrefI
![Page 2: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/2.jpg)
82
investigations have to respect in more detail constitutive characteristics of
material bahaviour on the microscale in zones of high stress singularities.
![Page 3: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/3.jpg)
Kapitel 6
The Pade–Approximation for
Matrix Exponentials Applied to
an Integration Algorithm
Preserving
Plastic Incompressibility
Computational Mechanics,
accepted 2004
![Page 4: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/4.jpg)
84
The Pade–Approximation for Matrix ExponentialsApplied to an Integration Algorithm Preserving
Plastic Incompressibility
H. Baaser∗
Institute of Mechanics, Darmstadt University of Technology, Germany
Abstract: The exponential update formalism is applied to an inte-
gration algorithm for rate–independent single crystal plasticity to
fulfill the compelling constraint of plastic incompressibility. The ex-
ponential function of a non–symmetric tensor valued argument is
expressed in terms of the Pade–approximation, which is capable
to approximate the matrix exponential without large computatio-
nal efforts. Thus, the plastic incompressibility condition is enforced
during the solution of a highly nonlinear system of equations. Ex-
amples show the applicability of the method.
Keywords: exponential map, plastic incompressibility, Pade–approximation, sin-
gle crystal plasticity, multi–surface plasticity, textur development
6.1 Introduction
The treatment of single crystal plasticity in the scope of continuum mechanics
at large strains can be traced back to the early work of Kroner [1958], Hill
[1966] and Lee [1969]. Among others, from Hill & Rice [1972] up to Asa-
ro [1983] this framework is specified more and more, so that the description
of single crystal behaviour in the sense of Schmids law can be seen as well
established from the present point of view. Furthermore, the computational
treatment of single crystal plasticity in the sense of multisurface plasticity is
widely applied, see Cuitino & Ortiz [1992], Miehe et al. [1999], Busso
& Cailletaud [2002] and references therein. In that sense, the activati-
on of one or more discrete slip systems, which can be identified due to the
∗Hochschulstr. 1, D–64289 Darmstadt, Germany
![Page 5: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/5.jpg)
6.1. INTRODUCTION 85
regular arrangement of atoms in the crystallographic system, is understood
as plastic yielding on possibly different yield surfaces. Thus, the numerous
contributions dealing with this topic differ from one another in the respective
treatment of multisurface plasticity. On the one hand, there are formulati-
ons with rate–dependent character allowing viscous over-stresses, which are
relaxed depending on the viscosity parameter down to the yield surfaces,
see e.g. Bertram et al. [1997] or Busso & Cailletaud [2002]. On the
other hand, the rate-independent applications, see e.g. Anand & Kotha-
ri [1996] or Miehe et al. [1999], have to enforce more or less complicated
and costly strategies to detect and to enable the current set of active yield
surfaces or slip systems, respectively. Along with that, often difficulties with
ill–posedness or non-definitness of the system of equations arise, which are
treated by pseudo–inverse techniques, see Miehe et al. [1999], without satis-
faction. Recently in Schmidt-Baldassari & Hackl [2001] and Schmidt-
Baldassari [2002] a computational application of rate-independent single
crystal plasticity is proposed, that avoids the above mentioned difficulties
by a mathematical combination of the known treatments of rate-dependent
behaviour. That proposed algorithm combines a simple penalty formulation,
representing rate–dependent and rate–independent behaviour by introducing
a penalty term along with an arbitrary penalty factor η > 0 , together with a
Lagrange multiplier formulation. Thus, an augmented Lagrange forma-
lism is introduced which can be treated in a clear mathemetical sense.
The main goal of this contribution is a further crucial point in the computa-
tional application of plasticity: the fulfillment and enforcement of the condi-
tion of plastic incompressibilty, which has been reported from experimental
observations already by Bridgman [1947], Bridgman [1952] and which
is of interest in treating large plastic deformations at least since Weber &
Anand [1990]. It is a well known fact, that a standard Euler–backward
integration scheme does not satisfy the constraint of plastic incompressibility
Jp = det(Fp) = 1 due to its character of additive update. In the meanti-
me, many contributions deal with that topic and apply different methods to
enforce the incompressibility constraint. While e.g. Miehe [1996a], Mie-
he et al. [1999] or Schmidt-Baldassari [2002] use a simple correction
procedure in a post-processing manner by a direct manipulation of det(Fp),
![Page 6: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/6.jpg)
86
Sansour & Kollmann [1998] or Gruttmann & Eidel [2002] make use
of the fact, that solely the exponential map preserves the plastic incompressi-
bility exactly. They approximate the exponential function of a tensor valued
argument by making use of the Cayley–Hamilton–theorem and a succes-
sive computation of polynom coefficients in order to approximate a Taylor
series of sufficient high order, see Section 3.2 of this artile. In parallel, we also
have to take into account the publication of de Souza Neto [2001], where
examinations on the classical Taylor series approximation are studied, and
the article of Itskov & Aksel [2002], which describes the derivative of the
exp–function with respect to non–symmetric tensor arguments analytically
following similar ideas as Sansour & Kollmann [1998]. Recently, Tsak-
makis & Willuweit [2003] are able to enforce the constraint of plastic
incompressibility during the iteration loop by an additional term acting on
the trace of the plastic strain tensor.
Here, we apply the Pade–approximation, see Arioli et al. [1996] and
Golub & Loan [1990], for the exponential function of a tensor valued ar-
gument to enforce an exponential update directly on the plastic part of the
deformation gradient. The Pade–approximation has been of increasing in-
terest since about 30 years mostly in mathematical oriented articles or in
general treaties on matrix computations, see e.g. Golub & Loan [1990]
for an overview. The basic ideas of the so–called Pade–approximation are
summarized and compared to the method of Sansour & Kollmann [1998]
with respect to numerical accuracy and time consumption. Thus, we are able
to obtain an integration algorithm for single crystal plasticity in the sense
of Schmidt-Baldassari [2002] that preserves the constraint of plastic in-
compressibility exactly. Different examples of simple shear computations and
texture development simulations show the applicability of this method.
The presented computations are all performed on a PC with 900 MHz–
AMD–CPU with a Linux–operating system using the g77–fortran compiler
with the -O3optimization options. So, the reader gets an impression of the
implementation of the described algorithms and is able to compare the given
time expenses, especially of Section 6.3.2.
Preliminary we denote the following vector and matrix operations, partly
in index notation, which will be used basically following the modern textbook
![Page 7: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/7.jpg)
6.2. MECHANICAL MODEL 87
Holzapfel [2000] on nonlinear continuum mechanics. The transpose of a
vector or tensorial quantity in matrix representation is indicated by (•)T, the
inverse of a matrix or a tensor by (•)−1. The dot–product contracting two
indices as a · b or A · B is given by akbk or AikBkj, respectively, with the
Einstein summation convention. In the same sense the“double contraction“,
denoted by e.g.A : B, means AijBij. The vector– or tensor productC = a⊗b
is given by Cij = ai bj resulting in a higher order representation. Furthermore,
the trace–operator is symbolized by tr(A) = Aii = A11+A22+A33. As long as
it is possible, first and second order tensor quantities are represented by small
or capital roman or greek symbols in boldface, while fourth order tensors are
denoted by e.g.�
or � .
6.2 Mechanical Model
6.2.1 Kinematics
The total deformation χ of a contiguous body in the Euklidian space � 3 is
indicated by the deformation gradient F := ∂χ(X)/∂X = ∂x/∂X, where X
identifies the positions of the material points in the reference configuration
and x denotes the same points in the current configuration, respectively.
For this reason, any physical reasonable deformation is characterized by a
Jacobian J = detF > 0.
With regard to the constitutive description of single crystal plasticity we
assume the well established multiplicative decompostion of the deformation
gradient
F = Fe · Fp (6.1)
in an elastic part Fe and a plastic part Fp, respectively, see e.g. Teodosiu
& Sidoroff [1976], Lee [1969], Miehe et al. [1999].
This assumption (6.1) goes along with the association of defining a plastic
intermediate configuration by the tangential map
dx = Fp · dX , (6.2)
whose qualities are denoted by ˆ(•) in the following. Thus, the plastic part
of the deformation gradient assembles the irreversible part of the total de-
![Page 8: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/8.jpg)
88
formation, which is attributed in this context to dislocation movements on
crystallograpic slip planes. Furthermore, the reversible deformations and any
rigid body rotaion of the considered material point are caught by Fe.
Based on (6.1), we use the following strain tensor of Cauchy–Green
type
C := FT · F (6.3)
and
Ce := FTe · Fe = F−T
p ·C · F−1p , (6.4)
which can be applied in an equivalent manner.
6.2.2 Konstitutive Assumptions
The elastic material response is governed by the existence of a Helmholtz
free energy function
Ψe =1
2κ ln2(Je) +
1
2µ(J
− 2
3e trCe − 3) , (6.5)
which is used in very similar form in e.g. Simo [1992] and is described in
detail in Holzapfel [2000]. Consequently, Je := detFe denotes the de-
terminant of the elastic part Fe of the deformation gradient and κ and µ
the compression and shear modulus, respectively; both can be used to deter-
mine the Youngs modulus via E = 9µκ/(µ + 3κ). With (6.5), the second
Piola–Kirchhoff stress tensor on the intermediate configuration reads
Se := 2∂Ψe
∂Ce
. (6.6)
Defining the mixed–variant Mandel stress tensor Σ := Ce · Se on the in-
termediate configuration, which plays a critical role in the derivations of the
next section. One can easily obtain the Kirchhoff stress tensor
τ = F−Te · Σ · FT
e = (κ ln Je −1
3µJ
− 2
3e trbe)I+ µJ
− 2
3e be (6.7)
on the current configuration, where be := Fe · FTe defines the elastic left
Cauchy–Green strain tensor. In the considered model the stress response
![Page 9: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/9.jpg)
6.2. MECHANICAL MODEL 89
is limited by n yield functions Φα(Σ), α ∈ {1, ..., n}, defining a convex, but
generally non–smooth region of permitted, possible stress states by
Φ(Σ) := max[
Φα(Σ)]
≤ 0 , α ∈ {1, ..., m} . (6.8)
Note that the stress state Σ depends directly on the strain tensor Ce, which
can directly be evaluated as function of C and F−1p as given in (6.4). In this
context F−1p is treated as interval variable, whose evaluation is represented
with respect to the principle of maximum plastic dissipation, see Simo [1992]
or Hackl [1997]. To this end, the stress state Σ , satisfying the yield con-
dition (6.8), maximizes the plastic dissipation Dp = Σ : lp with the spatial
velocity gradient lp := Fp · F−1p among all possible stress states.
The aim of treating single crystal plasticity with discrete slip planes de-
pending on the respective crystallographic structure as a special form of mul-
tisurface plasticity requires the definition of n independent yield surfaces, one
for each slip plane. In equivalence to Asaro [1983], we declare
Φα = τα − τ 0α α ∈ G : {1, ..., m} (6.9)
as yield functions (in this contribution without hardening term), where τα :=
Σ : Nα define the resolved stress (“Schmid–stress”) and τ 0α represent m pos-
sibly different yield stresses kept constant to model perfect plasticity without
hardening. The projection tensor
Nα := sα ⊗ nα (6.10)
is assembled by the different slip direction vectors sα and their normals nα.
These vectors are kept constant in the intermediate configuration and fulfill
the conditions
|sα| = |nα| = 1 and sα · nα = 0 . (6.11)
6.2.3 Augmented–Lagrange Formulation
Due to the inequality relation in (6.8), the above specified constitutive equati-
ons for perfect single crystal plasticity are not practical for a computational
treatment. For that reason, Schmidt-Baldassari & Hackl [2001] and
Schmidt-Baldassari [2002] explained in full detail the synthesis of as
![Page 10: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/10.jpg)
90
well as Lagrange multiplyer formulations and penalty formulations, which
are well known in literature, see e.g. Anand & Kothari [1996] and Bert-
ram et al. [1997], Cuitino & Ortiz [1992], respectively. This synthesis
in Schmidt-Baldassari [2002] results in an augmented Lagrange re-
presentation of (6.8) along with the loading–unloading constraints by the
introduction of additional scalar quantities zα
L(Σ, λα, zα) = −Σ : lp +
m∑
α=1
{λα(Φα + z2α)︸ ︷︷ ︸
“Lagrange Term”
+1
2η(Φα + z2α)
2
︸ ︷︷ ︸
“Penalty Term”
}.
(6.12)
In (6.12) easily the term corresponding to λα can be indentified with the
Lagrange multiplier method, while the term connected with η can be attached
to a penalty method. In that sense, the Lagrange multiplier terms treat
the fulfillment of the yield conditions, see Schmidt-Baldassari [2002] for
further discussions on that topic. Stationarity of (6.12) with respect to the
zα eliminates these additional quantities and results in a reduced Lagrangian
representation
Lred(Σ, λα) = −Σ : lp +1
2η
m∑
α=1
{
max[0; λα + ηΦα]2 − λ2α
}
, (6.13)
which is suitable for a computational treatment.
In addition, the stationarity of (6.13) with respect to the still unknown
stress state Σ yields the augmented flow rule
lp = Fp · F−1p =
m∑
α=1
max[0; λα + ηΦα]Nα (6.14)
and the consistency condition
λα = max[0; λα + ηΦα] . (6.15)
With (6.15) it is obvious to call a ship system active, if and only if λα > 0
for all α.
![Page 11: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/11.jpg)
6.3. IMPLEMENTATION 91
6.3 Implementation
6.3.1 Integration Algorithm
As stated before, the aim of this contribution is the application of a time inte-
gration algorithm to the set of constitutive equations of the previous section
that preserves the condition of plastic incompressibility. This application can
be seen as extension of the derivations of Schmidt-Baldassari [2002] and
clarify the results in a much more physical meaning.
It can easily be shown, that single crystal plasticity goes along with isocho-
ric deformations. Plastic incompressibility is represented by Jp = detFp!= 1,
which implies
Jp = (detFp)· = 0
= Jp tr (Fp · F−1p ) = Jp tr (lp) . (6.16)
As can be seen from (6.10) and (6.14), this condition is fulfilled due to the
fact that Nα are traceless.
Following the literature, e.g. Miehe [1996b], Sansour & Kollmann
[1998], Weber & Anand [1990], the time integration of (6.14) is here
carried out by an exponential approximation. Discretising Fp by
Fp, n+1 =1
∆t[Fp, n+1 − Fp, n] (6.17)
for the current time step with ∆t = tn+1 − tn, the flow rate (6.14) results in
∆t lp, n+1 = I− Fp,n · F−1p, n+1 (6.18)
Fp, n · F−1p, n+1 = I−∆t lp, n+1 .
Following Weber & Anand [1990], (6.18)2 can be seen as (discrete) ap-
proximation of
Fp, n · F−1p, n+1 = exp[−∆t lp, n+1] , (6.19)
which yields directly
Fp, n+1 = exp[∆t lp, n+1] · Fp, n . (6.20)
![Page 12: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/12.jpg)
92
Annotation: One can also obtain an equivalent result to (6.20) by a
straight forward calculation, without any discritizing assumptions a priori:
From the definition (6.14)1 lp = Fp · F−1p yielding Fp = lp · Fp the solution
Fp(t) = Fp,0 · exp[(t− t0) lp] (6.21)
can directly be integrated (separation of variables Fp and t), where Fp, 0
indicates again the initial condition at time t0. In that light (6.20) turns
up its special character of an update formula, while (6.21) represents the
general solution of the first order differential equation (6.14)1. But, due to the
enclosed nonlinearities and the depencence of the deformation history in lp,
(6.21) can not be used in that context. Thus, for the global iterative solution
procedure, (6.20) has to be applied. In spite of that, the above derivation
gives an interesting insight into the equivalence of the continous and discrete
character of the solution. 2
This result, and especially the discretized version (6.20), is known to pre-
serve plastic incompressibility, see Weber & Anand [1990], Simo [1992]
or Miehe [1996a].
In order to integrate the resulting set of equations by an elastic trial–/ plastic–
corrector scheme, we define the elastic trial state by
Ftriale, n+1 = Ftrial
e := Fn+1 · F−1p, n (6.22)
and compute straight forward by inverting (6.20) the update formula
F−1p, n+1 = F−1
p, n · exp[−∆t lp] , (6.23)
where the exponent of (6.23) has to be determined by (6.14)2 and (6.15) as
−∆t lp = −∆tm∑
α=1
λαNα . (6.24)
In equivalence to Schmidt-Baldassari [2002], we obtain the following
set of equations without any additional inequality constraint, but still with
the convex but non-smooth yield condition (6.8) inside. Applying a damped
Newton iteration scheme, the function
M∗(F−1p, n+1) := F−1
p, n+1 − F−1p, n · exp[−∆t lp]
!= 0 (6.25)
![Page 13: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/13.jpg)
6.3. IMPLEMENTATION 93
is defined from (6.23), which can be solved iteratively by looping
(k+1)F−1p =(k) F−1
p − v
[
∂M∗
∂F−1p
]−1
: M∗((k)F−1p ) (6.26)
where (0)F−1p = F−1
p, n is given as initial condition and k = 1, 2, 3, ... as loop
counter. Due to the non-smoothness of M∗ the damping value v has to be
determined e.g. by a line–search procedure. The Jacobian in (6.26) reads as
∂M∗
∂F−1p, n+1
= � +∆t η F−1p, n · exp[−∆t lp]⊗I :
m∑
α=1
(
∂Φα
∂F−1p, n+1
⊗Nα
)
, (6.27)
where � indicates the fourth order unit tensor of the form δikδjl and the mul-
tiplication operation ⊗ resulting here in a fourth order tensor is defined in
index notation by [A⊗B]ijkl = AikBjl. Please note the detailed representati-
on of the derivative of the exp–function in (6.27), which is of special interest
for the correct implementation of the given algorithm and seems not to be
published yet in this closed form.
6.3.2 Pade–approximation
The most crucial point — and the main target of this article — is the appli-
cation and computation of the exp[•] representation in (6.25) and (6.27) for
a non–symmetric tensor argument. In contrast to very similar applications
as in Miehe [1996a], Sansour & Kollmann [1998] or Gruttmann &
Eidel [2002], where the exp–function of a tensor valued argument is ap-
proximated by a Taylor series, here the exp–function of a tensor valued
argument is computed via the so–called Pade–approximation. This appro-
ximation is known to be much more precise than an approximation of the
exp–function by a classical Taylor series of the same order.
Nevertheless, here we compare the performance and accuracy of the Pade–
approximation with the algorithm given in Sansour & Kollmann [1998].
This algorithm is known to be very effective, because it is formulated espe-
cially for tensor exponentials with an argument of tensor order two by a
successive application of the Cayley–Hamilton–theorem in order to obtain a
result of desired accuracy. Although the Pade–approximation can generally
![Page 14: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/14.jpg)
94
be applied to obtain matrix exponentials of arguments of any order, here
we try to give an impression of the performance with respect to two–order–
tensors in comparison to the approach of Sansour & Kollmann [1998].
Of course, the computations with respect to two–order–tensors are of most
importance in that scope of continuum mechanics dealing with this type of
integration algorithms. But further developments of high sophisticated ma-
terial laws, e.g. thinking on coupled–field–problems, may give the need for
computational evaluation of matrix exponentials of order higher than two in
the future. Generally, the Pade–approximation is known to compute appro-
ximations of functions by at least two polynoms of several order, where for
those approximations using polynoms of the same order, the best validities
on accuracy and error control can be given, see Ward [1977].
For that reason and for brevity, here we give just the representation for
the so–called diagonal Pade–approximation with polynoms of the same order
Np(A) =
p∑
j=0
(2p− j)! p!
(2p)! j! (p− j)!Aj
Dp(A) =
p∑
j=0
(2p− j)! p!
(2p)! j! (p− j)!(−Aj) (6.28)
from which the exp–function can easily be approximated by
exp[A] ≈ Rp(A) = [Dp(A)]−1 ·Np(A) . (6.29)
In (6.28) the expressions (•)! indicates the factorial function of the integer
valued argument (•) and p denotes the order of the approximation.
The approach following Sansour & Kollmann [1998]
The approach of Sansour & Kollmann [1998] computing the exponential
map for a non–symmetric tensor argument A of order two should be reviewed
and outlined here shortly. Let us denote the three invariants ofA by I1 = trA,
I2 =12(I21 − trA2) and I3 = detA, so that the Cayley–Hamilton–theorem
reads as
A3 = I3I− I2A+ I21 . (6.30)
![Page 15: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/15.jpg)
6.3. IMPLEMENTATION 95
Beside the classical Taylor–series, the exp–function can be expressed as
exp[A] = α0(I1, I2, I3)I+ α1(I1, I2, I3)A+ α2(I1, I2, I3)A2 , (6.31)
where the key idea is now to compute the at first unknown values of α0, α1
and α2 by a successive use of (6.30) and the representations
α0 = 1 +1
3!I3 +
p∑
n=4
1
n!γ(n)0
α1 = 1−1
3!I2 +
p∑
n=4
1
n!γ(n)1
α2 = 1 +1
3!I1 +
p∑
n=4
1
n!γ(n)2 (6.32)
with γ0, γ1, γ2 as functions of the invariants I1, I2, I3. Again, we dictate the
accuracy of the approximation by the number p.
Comparison of both approximations by a representative example
Let us compare the performance of both approximations with respect to ac-
curacy and time consumption by a short example, which is taken randomly
out of any step dealing with the presented algorithm of integrating the con-
stitutive equations for single crystal plasticity.
Beside the theoretical annotations in e.g. Golub & Loan [1990] or
Ward [1977] on computation accuracy, here we have a look on the well–
established Frobenius–norm ||B||F =
√n∑
i=1
n∑
j=1
B2ij of any [n × n]–matrix
B. For comparison, we observe the Frobenius–norm ∆Np = ||Bp−Bp+1||F
of two following approximations with accuracy number p and p+ 1 for both
methods.
For that example we take the argument
A =
31.3882085 −0.0509279942 0.179583817
−0.234900881 −63.3453809 −0.102917584
0.0835649182 −0.205026733 31.9571724
(6.33)
and count the time consumption t for evalutating the approximating of the
exp–function.
![Page 16: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/16.jpg)
96
Simple recomputation of (6.29) show the high accuracy of the Pade–
approximation even for low orders like p = 2, resulting for this example in
BP = expP [A] =
0.697044427 −0.0660134424 0.169674095
−0.222822197 1.22928787 −0.146740921
0.102111261 −0.251920833 1.23082955
(6.34)
with accuracy ∆Np=2 = 2.17922754 · 10−6 and a computing time tP = 12.25 ·
10−12 s for this typical evaluation. It is worthy to say, that no further matrix
manipulations improving the norm of A as proposed by Golub & Loan
[1990] has been applied a priori in this case.
In contrast, the approximation following Sansour & Kollmann [1998]
computes the result
BS&K = expS&K[A] =
0.697035864 −0.0660161517 0.16967964
−0.222829506 1.22929654 −0.146747244
0.102115313 −0.251930861 1.23083832
(6.35)
with accuracy ∆Np=7 = 2.27477424 · 10−6 of the same order of magnitude
and a computing time of tS&K = 8.75 · 10−12 s, where the accuracy number
for that evaluation has to be set to p = 7.
So, it is obvious, that the Pade–approximation has indeed a higher time
consumption of a factor of about tP/tS&K = 1.31. But it is — as mentioned
above —much more flexible in computing matrix exponentials of higher order
than two and it should be applied here for the presented algorithm preserving
plastic incompressibility.
6.3.3 Linearization of Integration Algorithm
The linearization of the integration algorithm proposed in Sec. 6.3.1 in com-
bination with the applied approximation in Sec. 6.3.2 is an essential point for
a successful application of this algotithm to polycrystal problems by the fini-
te element method (FEM). In spite of not having the necessity to implement
the consistent material modulus�
for this contribution due to the explicit
prescription of the total deformation gradient F in the examples below, we
want to summarize the proceeding in the following. With that, an additional
![Page 17: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/17.jpg)
6.4. EXAMPLES 97
check of correct implementation is given by controlling the quadratic conver-
gence behaviour of the applied (global) Newton iteration scheme. Deriving
the (algorithmic) tangential modulus on the intermediate configuration
ˆ�= 2
∂Se
∂Ce
+ 2∂Se
∂F−1p
:∂F−1
p
∂Ce
= ˆ�e + ˆ�
e :
(
∂Ce
∂F−1p
:∂F−1
p
∂Ce
)
, (6.36)
the crucial point becomes obvious: The derivation of the internal variable F−1p
with respect to the strain measure Ce has to be determined during the (local)
iteration loop (6.26). The first derivative term in (6.36) can be obtained quite
easily by∂Ce
∂F−1p
=∂
∂F−1p
[F−T
p ·C · F−1p
], (6.37)
while the second derivative term in (6.36) has to be computed during the
local iteration loop by solving
∂F−1p (i)
∂Ce
= −∑
α
(F−1p ,n ·Nα)
⊗
{
∂∆λα(i)∂Ce
+∆t η
(
∂Φα
∂F−1p
∣∣∣∣(i)
:∂F−1
p (i)
∂Ce
+∂Φα
∂Ce
∣∣∣∣(i)
)}
(6.38)
in the case of α active for ∂F−1p (i)/∂Ce. Thus, ∂Ce
∆λα (1) = 0 enters as initial
condition for i = 1. It should be emphasized in this context, that the solution
of (6.38) is obtained by reordering the equation, which generates a system
matrix of the form (6.27). So, the closed form of the derivate of the exp–
function enters the tangential modulus ˆ�in this step.
The required modulus�, which depends on the configurational setting
of the respective finite element formulation, can be obtained subsequently
by the related pull–back or push–forward transformations for forth–order
tensors acting on ˆ�.
6.4 Examples
To demonstrate the applicability of the proposed integration scheme, we pro-
vide two different types of examples. All computations are carried out with
![Page 18: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/18.jpg)
98
Table 6.1: Material Parameters (Youngs and Shear Modulus, Poissons ra-
tion and Schmid Yield Stress), Penalty Factor and Applied Order of Pade–
Approximation
E [MPa] µ [MPa] ν τ0 [MPa] η p
2.1 · 105 0.7 · 105 0.315 6.0 2.0 5
the set of material parameters given in Tab. 6.1 and equivalently used in
Schmidt-Baldassari [2002] and Miehe [1996a]. Solely the initial orien-
tation are treated as initial conditions for the integration procedure of each
single crystal. They are given as three Euler angles by the triple (ψ|ϑ|ϕ)
defining the sequence of three independent rotations. Thus, we start every
local iteration process with
Fp
∣∣t=0
= R0
=
cosψ sinψ 0
− sinψ cosψ 0
0 0 1
·
1 0 0
0 cosϑ sinϑ
0 − sinϑ cosϑ
·
cosϕ sinϕ 0
− sinϕ cosϕ 0
0 0 1
.
Considering a fcc–centered–cubic (fcc) structure of a single crystal, one
can identify twelve slip systems in it, which are given due to the densiest
configuration of atoms in the respective spatial planes. These slip systems are
represented by their slip direction si, i = 1, ..., 12, and the connected normal
ni. Both vector sets are given in Tab. 6.2 for an assumed fcc structure.
6.4.1 Simple Shear
Firstly, we apply a simple shear deformation on a single crystal by prescribing
the deformation gradient in the form
F =
1 γ 0
0 1 0
0 0 1
.
This test example is illustrated in Fig. 6.1, where γ can graphically be dep-
cited. The computations of this section are performed with two different
![Page 19: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/19.jpg)
6.4. EXAMPLES 99
Table 6.2: Slip Systems in a FCC Structured Crystal
Slip Direction Normal Direction
s1 =1√2[1,−1, 0]T n1 =
1√3[1, 1, 1]T
s2 =1√2[1, 0,−1]T n2 =
1√3[1, 1, 1]T
s3 =1√2[0, 1,−1]T n3 =
1√3[1, 1, 1]T
s4 =1√2[1,−1, 0]T n4 =
1√3[1, 1,−1]T
s5 =1√2[1, 0, 1]T n5 =
1√3[1, 1,−1]T
s6 =1√2[0, 1, 1]T n6 =
1√3[1, 1,−1]T
s7 =1√2[1, 1, 0]T n7 =
1√3[1,−1, 1]T
s8 =1√2[1, 0,−1]T n8 =
1√3[1,−1, 1]T
s9 =1√2[0, 1, 1]T n9 =
1√3[1,−1, 1]T
s10 =1√2[1, 1, 0]T n10 =
1√3[−1, 1, 1]T
s11 =1√2[1, 0, 1]T n11 =
1√3[−1, 1, 1]T
s12 =1√2[0, 1,−1]T n12 =
1√3[−1, 1, 1]T
γ
Figure 6.1: Simple Shear Test, Shear Number γ Indicated
step–sizes of ∆γ = 0.01 and ∆γ = 0.1 ending in 400 and 40 equidistant
steps, respectively, up to γ = 4. The resulting Kirchhoff shear stress ten-
sor component τ12 normalized by τ0 is plotted vs. the shear number γ in
![Page 20: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/20.jpg)
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 5 10 15 20 25 30 35γ
τ12τ0
(1)(2)
(3)
(4)
(5)
(0◦|30◦|90◦) (5)(0◦|30◦|75◦) (4)(0◦|15◦|90◦) (3)(0◦|15◦|75◦) (2)(0◦|15◦|60◦) (1)
(ψ|ϑ|ϕ) =
Figure 6.2: Kirchhoff Stress, Shear Component τ12,until Shear Number
γ = 4, for Different Initial Conditions Indicated by (ψ|ϑ|ϕ) in R0
Fig. 6.2 exemplary for five different initial conditions (1)–(5) given in the
legend of this figure. Analogical results with the typical oscilating behaviour
have already been reported by Miehe [1996b], Bertram et al. [1997] and
Schmidt-Baldassari & Hackl [2001]. The results for both different step–
sizes agree identically, so that a very good convergence behaviour can be re-
ported. Additionally, Fig. 6.4 gives resulting values for Jp = det(Fp) for the
applied initial angles (1)–(5) vs. the shear number γ. Again, the computati-
ons for both step–sizes agree. Therefore, it can be shown, that the applied
integration algorithm using the described Pade–approximation preserves the
condition Jp!= 1 straightly for such finite deformations.
6.4.2 Texture Development
Secondly, the texture development of 3000 initially randomly distributed sin-
gle crystal configurations subjected to a simple shear deformation up to
γ = 8 is demonstrated. That computations are performed in 80 substeps
with ∆γ = 0.1. The application of prescribed deformation of this type corre-
![Page 21: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/21.jpg)
6.5. SUMMARY & CONCLUSIONS 101
-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1b)a)
Figure 6.3: Textur Development of {100}–Pole Figure: a) Randomly Gene-
rated Initial Configuration, 3000 Crystals, b) at Shear Number γ = 8
sponds to a Taylor type assumption, where all crystals are assumed to see
the same prescribed deformation state. That initial configuration is visualized
by a standard stereographic projection of the {100} component in Fig. 6.3a).
In contrast, Fig. 6.3b) gives the positions after the applied deformation up to
γ = 8. To be more presice, here, just the first column of Fp in matrix repre-
sentation is plotted, which corresponds to a mapping of the direction vector
[1, 0, 0]T by Fp. Again, the resulting figure is in good agreement with known
computations in literature. Clearly, for the case of a fcc crystal structure, the
directions {100}, {010} and {001} are equitable. Only for a better represen-
tation, especially in Fig. 6.3b), the plots of the second and the third direction
are neclected, which results in a non–symmetric appearance of Fig. 6.3b).
6.5 Summary & Conclusions
A model for rate–independent single crystal plasticity is treated in the sense
of multisurface plastitcity describing the twelve discrete slip systems of a fcc
single crystal. The main focus is directed to the solution algorithm to fulfill
the additional constraint condition of plastic incompressibility. It is shown,
that the Pade–approximation of relative low order (in this case p = 2) is able
to catch the main feature of the exponential update procedure, namely the
![Page 22: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/22.jpg)
102
0.9
0.95
1
1.05
1.1
0 0.5 1 1.5 2 2.5 3 3.5 4
Jp = detFp
γ
(1)–(5)
(0◦|30◦|90◦) (5)(0◦|30◦|75◦) (4)(0◦|15◦|90◦) (3)(0◦|15◦|75◦) (2)(0◦|15◦|60◦) (1)
(ψ|ϑ|ϕ) =
Figure 6.4: Constraint Jp = 1 for Examples (1)–(5) in Fig. 6.2
conservation of the characteristic detFp = 1. It is obvious, that the Pade–
approximation has a higher time consumption than the algorithm proposed
by Sansour & Kollmann [1998] especially for tensor arguments of order
two. But it is — as mentioned above — much more flexible in computing
matrix exponentials of higher order, which may get need in future for similar
integration algorithms. To this end, the application of the approximation is
recommended also for equivalent problems implying multisurface yield con-
ditions, like geomechanical descriptions of soils etc.
Acknowledgement
I thank Dr. M. Schmidt–Baldassari and Prof. K. Hackl, both Bochum
(Germany), for helpful comments and hints on the implementation of the
augmented Lagrange formulation and Prof. C. Sansour, Adelaide (Au-
stralia), for the discussion on his algorithm.
![Page 23: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/23.jpg)
Literaturverzeichnis
Al-Ostaz, A. & Jasiuk, I. (1997). ‘Crack initiation and propagation in
materials with randomly distributed holes’. Engineering Fracture Me-
chanics 58(5–6), 395–420.
Anand, L. & Kothari, M. (1996). ‘A computational procedure for rate–
independent crystal plasticity’. Journal of the Mechanics and Physics of
Solids 44(4), 525–558.
Aravas, N. (1987). ‘On the numerical integration of a class of pressure–
dependent plasticity models’. International Journal for Numerical Me-
thods in Engineering 24, 1395–1416.
Aravas, N. & McMeeking, R.M. (1985). ‘Microvoid growth and failure
in the ligament between a hole and a blunt crack tip’. International
Journal of Fracture 29, 21–38.
Arioli, M. , Codenotti, B. & Fassino, C. (1996). ‘The Pade Method for
Computing the Matrix Eponential’. Linear Algebra and its Applications
240, 111–130.
Asaro, R.J. (1983). ‘Crystal plasticity’. Journal of Applied Mechanics.
Baaser, H. (2004). ‘The Pade–Approximation for Matrix Exponentials
Applied to an Integration Algorithm Preserving Plastic Incompressibi-
lity’. Computational Mechanics. accepted.
Baaser, H. & Gross, D. (1998). Damage and strain localisation during
crack propagation in thin–walled shells. In A. Bertram & F. Sido-
![Page 24: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/24.jpg)
104
roff (Eds.). ‘Mechanics of Materials with Intrinsic Length Scale’. EDP
Sciences. Magdeburg, Germany. pp. 13–17. Journal de Physique IV, 8.
Baaser, H. & Gross, D. (2000). ‘Crack analysis in ductile cylindrical
shells using Gursons model’. International Journal of Solids and Struc-
tures 37, 7093–7104.
Baaser, H. & Gross, D. (2001a). ‘3D Nonlocal Simulation of Ductile
Crack Growth — A Numerical Realization’. European Journal of Finite
Elements 10(2–3–4), 353–367. ISBN 2-7462-0260-3.
Baaser, H. & Gross, D. (2001b). Ductile damage and crack growth ana-
lysis in 3D structures — limitations of CDM approaches. In ‘Proceedings
of the ICF10’. Hawaii.
Baaser, H. & Gross, D. (2003a). ‘Analysis of void growth in a duc-
tile material in front of a crack tip’. Computational Materials Science
26(C), 28–35.
Baaser, H. & Gross, D. (2003b). Remarks on the use of continuum
damage models and on the limitations of their applicability in ductile
fracture mechanics. In K. Hutter & H. Baaser (Eds.). ‘Deformation
and Failure in Metallic Materials’. Springer. pp. 345–362.
Baaser, H. , Hohe, J. & Gross, D. (1997). Ductile crack growth analysis
using the Gurson damage model. In W. Kosinski, R. de Boer & D.
Gross (Eds.). ‘Problems of Environmental and Damage Mechanics’.
Instytut Naukowo–Badawczy Zturek. Warszawa, Poland. pp. 139–147.
Baaser, H. & Tvergaard, V. (2000). A new algorithmic approach trea-
ting nonlocal effects at finite rate-independent deformation using the
Rousselier damage model. Report DCAMM 647. TU Denmark. Lyngby.
Baaser, H. & Tvergaard, V. (2003). ‘A new algorithmic approach
treating nonlocal effects at finite rate-independent deformation using
the Rousselier damage model’. Computer Methods in Applied Mechanics
and Engineering 192(1–2), 107–124.
![Page 25: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/25.jpg)
LITERATURVERZEICHNIS 105
Bazant, Z.P. & Pijaudier-Cabot, G. (1988). ‘Nonlocal continuum da-
mage, localisation instability and convergence’. Journal of Applied Me-
chanics 55, 287–293.
Bertram, A. , Bohlke, T. & Kraska, M. (1997). ‘Numerical simula-
tion of deformation induced anisotropy of polycrystals’. Computational
Materials Science 9(1–2), 158–167.
Bilby, B.A. , Bullough, R. & Smith, E. (1955). ‘Continuous dis-
tribution of dislocations: A new application of the methods of non–
riemannian geometry’. Proceedings of the Royal Society of London Series
A 231, 263–273.
Braess, D. (1997). Theorie, schnelle Loser und Anwendungen in der Ela-
stizitatstheorie. Springer.
Bridgman, P.W. (1947). ‘The effect of hydrostatic pressure on the fracture
of brittle substances’. Journal of Applied Physics 18, 246–258.
Bridgman, P.W. (1952). Studies in Large Plastic Flow and Fracture with
Special Emphasis on the Effects of Hydrostatic Pressure. McGraw–Hill.
New York.
Busso, E.P. & Cailletaud, G. (2002). On the numerical implementation
of non–smooth domains. Part I: Rate–dependent formulations. In ‘Non-
linear Mechanics of Anisotropic Materials’. Liege, Belgium. EMMC 6.
Cermelli, P. & Gurtin, M.E. (2001). ‘On the characterization of geo-
metrically necessary dislocations in finite plasticity’. Journal of the Me-
chanics and Physics of Solids 49, 1539–1568.
Cook, R.D. , Malkus, D.S. & Plesha, M.E. (1989). Concepts and
Applications of Finite Element Analysis. John Wiley & Sons.
Cuitino, A. & Ortiz, M. (1992). ‘Computational modelling of single
crystals’. Model. Sim. Mater. Sci. Eng. 1, 225–263.
De Borst, R. (1991). ‘Simulation of strain localisation: A reappraisal of
the Cosserat continuum’. Engineering Computations 8, 317–332.
![Page 26: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/26.jpg)
106
De Borst, R. , Pamin, J. & Geers, M.G.D. (1999). ‘On coupled
gradient–dependent plasticity and damage theories with a view to locali-
zation analysis’. European Journal of Mechanics – A/Solids 18, 939–962.
De Wit, R. (1981). ‘A view of the relation between the continuum theory of
lattice defects and non–euklidian geometry in the linear approximation’.
International Journal of Engineering Science 19(12), 1475–1506.
Eckert, S. , Baaser, H. & Gross, D. (2003a). ‘A DAE–approach ap-
plied to elastic–plastic material behavior using FEM’. Z. Angew. Math.
Mech. in press.
Eckert, S. , Baaser, H. , Gross, D. & Scherf, O. (2003b). ‘A BDF2
Integration Method with Step Size Control for Elasto–Plasticity’. Com-
putational Mechanics. submitted and revised.
Ehlers, W. , Diebels, S. & Volk, W. (1998). Deformation and com-
patibility for elasto–plastic micropolar materials with applications to
geomechanical problems. In A. Bertram, S. Forest & F. Sidoroff
(Eds.). ‘Mechanics of Materials with Intrinsic Length Scale’. Magdeburg,
Germany. pp. 120–127.
Ellsiepen, P. (1999). Zeit– und ortsadaptive Verfahren angewandt auf
Mehrphasenprobleme poroser Medien. PhD thesis. Universitat Stutt-
gart. Institut fur Mechanik, Universitat Stuttgart.
Ellsiepen, P. & Hartmann, S. (2001). ‘Remarks on the interpretation
of current non–linear finite element analyses as differential–algebraic
equations’. International Journal for Numerical Methods in Engineering
51, 679–707.
Garmestani, H. , Lin, S. , Adams, B.L. & Ahzi, S. (2001). ‘Stati-
stical continuum theory for large plastic deformation of polycrystalline
materials’. Journal of the Mechanics and Physics of Solids 49, 589–607.
Ghosh, S. , Lee, K. & Raghavan, P. (2001). ‘A multi–level computatio-
nal model for multi–scale damage analysis in composite and porous ma-
terials’. International Journal of Solids and Structures 38, 2335–2385.
![Page 27: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/27.jpg)
LITERATURVERZEICHNIS 107
de Souza Neto, E.A. (2001). ‘The exact derivatice of the exponential of
an unsymmetric tensor’. Computer Methods in Applied Mechanics and
Engineering 190, 2377–2383.
Golub, G.H. & Loan, C.F. Van (1990). Matrix Computations. 2nd edn.
The John Hopkins University Press. Baltimore.
Gruttmann, F. & Eidel, B. (2002). On the implementation of aniso-
tropic finite strain plasticity. In M.A. Mang, F.G. Rammerstorfer
& J. Eberhardsteiner (Eds.). ‘Proceedings of the Fifth World Con-
gress on Computational Mechanics (WCCM V)’. Vienna University of
Technology, Austria.
Gurson, A.L. (1977). ‘Continuum theory of ductile rupture by void nuclea-
tion and growth: Part I - yield criteria and flow rules for porous ductile
media’. Journal for Engineering Materials in Technology 99, 2–15.
Hackl, K. (1997). ‘Generalized standard media and variational principles
in classical and finite strain elastoplasticity’. Journal of the Mechanics
and Physics of Solids 45(5), 667–688.
Hill, R. (1958). ‘A general theory of uniqueness and stability in elastic–
plastic solids’. Journal of the Mechanics and Physics of Solids 6, 236–
249.
Hill, R. (1966). ‘Generalized constitutive relations for incremental defor-
mation of metal crystals by multislip’. Journal of the Mechanics and
Physics of Solids 14, 95–102.
Hill, R. & Rice, J.R. (1972). ‘Constitutive analysis of elasto–plastic
crystals at arbitrary strain’. Journal of the Mechanics and Physics of
Solids 20, 401–413.
Hohe, J. , Baaser, H. & Gross, D. (1996). ‘Analysis of ductile crack
growth by means of a cohesive damage model’. International Journal of
Fracture 81, 99–112.
Holzapfel, G.A. (2000). Nonlinear Solid Mechanics. Wiley.
![Page 28: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/28.jpg)
108
Itskov, M. & Aksel, N. (2002). ‘A closed–form respresentation for the
derivative of non–symmetric tensor power series’. International Journal
of Solids and Structures 39, 5963–5978.
Kolling, S. , Baaser, H. & Gross, D. (2002). ‘Material forces
due to crack–inclusion interaction’. International Journal of Fracture
18(3), 229–238.
Kondo, K. (1952). On the geometrical and physical foundation of the theo-
ry of yielding. In ‘Proc. 2. Japan Nat. Congress Appl. Mech.’. pp. 41–47.
Science Council of Japan.
Kroner, E. (1958). Kontinuumstheorie der Versetzungen und Eigenspan-
nungen. Springer.
Leblond, J.B. , Perrin, G. & Devaux, J. (1994). ‘Bifurcation Effects
in Ductile Metals with Nonlocal Damage’. ASME Journal of Applied
Mechanics 61, 236–242.
Lee, E.H. (1969). ‘Elastic–plastic deformation at finite strains’. Journal of
Applied Mechanics 36, 1–6.
Leppin, C. (2000). Ein diskontinuierliches Modell fur Lokalisierungsversa-
gen in metallischen und granularen Materialien. Dissertation. Universi-
tat Hannover. Institut fur Baumechanik und Numerische Mechanik.
Li, Z.H. , Bilby, B.A. & Howard, I.C. (1994). ‘A study of the internal
parameters of ductile damage theory’. Fatigue & Fracture of Engineering
Materials & Structures 17(9), 1075–1087.
Mathur, K.K. , Needleman, A. & Tvergaard, V. (1994). ‘Ductile
failure analyses on massively parallel computers’. Computer Methods in
Applied Mechanics and Engineering 119, 283–309.
Miehe, C. (1996a). ‘Exponential map algorithm for stress updates in ani-
sotropic multiplicative elastoplasticity for single crystals’. International
Journal for Numerical Methods in Engineering 39(19), 3367–3390.
![Page 29: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/29.jpg)
LITERATURVERZEICHNIS 109
Miehe, C. (1996b). ‘Multisurface thermoplasticity for single crystals at
large strains in terms of eulerian vector updates’. International Journal
of Solids and Structures 33, 3103–3130.
Miehe, C. , Schroder, J. & Schotte, J. (1999). ‘Computational homo-
genization analysis in finite plasticity simulation of texture development
in polycrystalline materials’. Computer Methods in Applied Mechanics
and Engineering 171, 387–418.
Oliver, J. (1996). ‘Modelling strong discontinuities in solid mechanics
via strain softening constitutive equations: Part I and II’. International
Journal for Numerical Methods in Engineering 39, 3575–3623.
Ortiz, M. , Leroy, Y. & Needleman, A. (1987). ‘A finite element me-
thod for localized failure analysis’. Computer Methods in Applied Me-
chanics and Engineering 61, 189–214.
Ortiz, M. , Repetto, E.A. & Stainier, L. (2000). ‘A theory of subgrain
dislocation structures’. Journal of the Mechanics and Physics of Solids
48, 2077–2114.
Pardoen, T. & Hutchinson, J.W. (2000). ‘An extended model for void
growth and coalescence’. Journal of the Mechanics and Physics of Solids
48, 2467–2512.
Petryk, H. (1997). ‘Plastic instability: criteria and computational approa-
ches’. Archives of Computational Methods in Engineering 4(2), 111–151.
Pijaudier-Cabot, G. & Benallal, A. (1993). ‘Strain localization and
bifurcation in a nonlocal continuum’. International Journal of Solids
and Structures 30(13), 1761–1775.
Reese, S. & Wriggers, P. (1997). ‘A material model for rubber–like
polymers exhibiting plastic deformation: computational aspects and a
comparison with experimental results’. Computer Methods in Applied
Mechanics and Engineering 148, 279–298.
![Page 30: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/30.jpg)
110
Rousselier, G. , Devaux, J.-C. , Mottet, G. & Devesa, G. (1989).
‘A methodology for ductile fracture analysis based on damage mecha-
nics: An illustration of a local approach of fracture’. Nonlinear Fracture
Mechanics 2, 332–354.
Rousselier, G. (2001). ‘Dissipation in porous metal plasticity and ductile
fracture’. Journal of the Mechanics and Physics of Solids 49, 1727–1746.
Sansour, C. & Kollmann, F.G. (1998). ‘Large viscoplastic deforma-
tions of shells. theory and finite element formulation’. Computational
Mechanics 21, 512–525.
Scherf, O. (2000). Numerische Simulation inelastischer Korper. PhD the-
sis. Technische Universitat Darmstadt. Mathematik. VDI Reihe 20
Nr. 321.
Schmidt-Baldassari, M. (2002). ‘Numerical concepts for rate–
independent single crystal plasticity’. Computer Methods in Applied Me-
chanics and Engineering. 192, 11–12, 1261-1280.
Schmidt-Baldassari, M. & Hackl, K. (2001). ‘Aspekte der nu-
merischen Behandlung idealer Kristallplastizitat’. Z. Angew. Math.
Mech. 81(S2), S359–S360.
Schreyer, H.L. & Neilsen, M.K. (1996). ‘Analytical and numerical
tests for loss of material stability’. International Journal for Numerical
Methods in Engineering 39, 1721–1736.
Shewchuk, J.R. (1996). Triangle: Engineering a 2D Quality Mesh Genera-
tor and Delaunay Triangulator. In ‘First Workshop on Applied Compu-
tational Geometry (Philadelphia, Pennsylvania)’. pp. 124–133. See also
http://www.cs.cmu.edu/∼quake /triangle.research.html.
Simo, J.C. (1992). ‘Algorithms for static and dynamic multiplicative plasti-
city that preserve the classical return mapping schemes of the infinitesi-
mal theory’. Computer Methods in Applied Mechanics and Engineering
99, 61–112.
![Page 31: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/31.jpg)
LITERATURVERZEICHNIS 111
Simo, J.C. & Armero, F. (1992). ‘Geometrically nonlinear enhanced–
strain mixed methods and the method of incompatible modes’. Interna-
tional Journal for Numerical Methods in Engineering 33, 1413–1449.
Steinmann, P. (1996). ‘Views on multiplicative elastoplasticity and the
continuum theory of dislocations’. International Journal of Engineering
Science 34(15), 1717–1735.
Steinmann, P. , Larsson, R. & Runesson, K. (1997). ‘On the loca-
lization properties of multiplicative hyperelasto–plastic continua with
strong discontinuities’. International Journal of Solids and Structures
34(8), 969–990.
Steinmann, P. , Miehe, C. & Stein, E. (1994). ‘Comparison of different
finite deformation inelastic damage models within multiplicative elasto-
plasticity for ductile materials’. Computational Mechanics 13, 458–474.
Teodosiu, C. & Sidoroff, F. (1976). ‘A finite theory of the elasto-
viscoplasticity of single crystals’. International Journal of Engineering
Science 14, 713–723.
Tsakmakis, Ch. & Willuweit, A. (2003). Use of the elastic predictor–
plastic corrector method for integrating finite deformation plasticity
laws. In K. Hutter & H. Baaser (Eds.). ‘Deformation and Failu-
re in Metallic Materials’. Springer.
Tvergaard, V. (1989). ‘Material failure by void growth to coalescence’.
Advances in Applied Mechanics 27, 83–151.
Tvergaard, V. & Needleman, A. (1995). ‘Effects of nonlocal damage
in porous plastic solids’. International Journal of Solids and Structures
32(8/9), 1063–1077.
Tvergaard, V. & Needleman, A. (1997). ‘Nonlocal effects on locali-
zation in a void–sheet’. International Journal of Solids and Structures
34(18), 2221–2238.
![Page 32: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/32.jpg)
112
van der Giessen, E. & Tvergaard, V. (1994). ‘Interaction of cavitating
grain boundary facets in creeping polycrystals’. Mechanics of Materials
17, 47–69.
Ward, R.C. (1977). ‘Numerical computation of the matrix exponential with
accuracy estimate’. SIAM Journal of Numerical Analysis 14(4), 600–
610.
Weber, G. & Anand, L. (1990). ‘Finite deformation constitutive equa-
tions and a time integration procedure for isotropic, hyperelastic–
viscoplastic solids’. Computer Methods in Applied Mechanics and En-
gineering 79, 173–202.
Wells, G.N. & Sluys, L.J. (2001). ‘Analysis of slip planes in three–
dimensional solids’. Computer Methods in Applied Mechanics and Engi-
neering 190, 3591–3606.
Zhang, Z. L. & Hauge, M. (1999). ‘On the Gurson micromechanical pa-
rameters’. Fatigue and Fracture Mechanics 29, 364–382.
![Page 33: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/33.jpg)
![Page 34: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/34.jpg)
Lebenslauf
Dr.–Ing. Herbert Baaser
geboren am 4. Januar 1971 in Russelsheim/Main
verheiratet seit 2. Juli 1998 mit Andrea Baaser, geb. Decker, Lehrerin
2 Kinder: Lukas ?2000 und Lena ?2003
www: http://coulomb.mechanik.tu-darmstadt.de/∼baaser
e–mail: [email protected]
1977–1981 Grundschule Astheim
1981–1983 Mittelpunktschule Trebur
1983–1990 Gymnasium Theresianum Mainz
Schulabschluss Abitur
Freistellung vom Wehrdienst (1989–1996): Verpflichtung zum Katastrophenschutz
Freiwillige Feuerwehr Trebur–Astheim im Kreis Groß–Gerau
1990 und 1991 Industriepraktika
bei Fa. Adam Opel AG, Russelsheim
und Fa. Mercodor GmbH, Trebur
1990–1992 Studium: Allg. Maschinenbau, TH Darmstadt (jetzt TU)
Vordiplom Maschinenbau
1992–1995 Studium der Mechanik, TH Darmstadt
Studienabschluss Diplom–Ingenieur Fachrichtung Mechanik
Juli 1995 – Wissenschaftlicher Mitarbeiter am
Marz 2003 Institut fur Mechanik, TU Darmstadt
Juli 1999 Promotion zum Dr.–Ing.
Marz–Juli 2000 Auslandsaufenthalt an DTU Kopenhagen bei Prof. V. Tvergaard
Herbst 2000-2002 mehrere Aufenthalte an TUBA Freiberg bei Prof. M. Kuna
seit April 2003 Berechnungsingenieur und Projektleiter bei
Freudenberg Forschungsdienste KG, Weinheim
seit September 2003 Lehrbeauftragter der FH Bingen
30. Januar 2004 Habilitation im Fach Mechanik
Vortragstitel:
”Uber den Versuch, Kontinuumsschadigungsmodelle
thermodynamisch zu klassifizieren“
![Page 35: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/35.jpg)
Bisher sind in dieser Reihe folgende Bande erschienen:
Forschungsberichte des Instituts fur Mechanik
der Technischen Universitat Darmstadt
Band 1
”Zur mikrorissinduzierten Schadigung sproder Materialien“,
B. Lauterbach, Dissertation, 2001, ISBN 3-935868-01-4
Band 2
”3D-Simulation der Mikrostrukturentwicklung in Zwei-Phasen-Materialien“,
R. Muller, Dissertation, 2001, ISBN 3-935868-02-2
Band 3
”Zur numerischen Simulation von Morphologieanderungen in mikrohe-
terogenen Materialien“,
S. Kolling, Dissertation, 2001, ISBN 3-935868-03-0
Band 4
”Theoretische und numerische Untersuchung von Versagensmechanis-
men in Metall-Keramik-Verbundwerkstoffen“,
T. Emmel, Dissertation, 2002, ISBN 3-935868-04-9
Band 5
”On Microcrack Dominated Problems in Dynamics and Statics of brittle
fracture – A Numerical Study by Boundary Element Techniques“,
S. Rafiee, Dissertation, 2002, ISBN 3-935868-05-7
Band 6
”Kontinuumsmechanik anisotroper Festkorper und Fluide“,
H. Ehrentraut, Habilitationsschrift, 2002, ISBN 3-935868-06-5
Band 7
”Plane unsteady inviscid incompressible hydrodynamics of a thin elastic
profile “,
N. Blinkova, Dissertation, 2002, ISBN 3-935868-07-3
![Page 36: a] [Ptuprints.ulb.tu-darmstadt.de/420/3/habil_elektr_3.pdf · gle crystal plasticity, multi{surface plasticity, textur development 6.1 Introduction The treatment of single crystal](https://reader033.fdocument.org/reader033/viewer/2022052800/5f0f53897e708231d4439b67/html5/thumbnails/36.jpg)






![C5.2 Elasticity and Plasticity [1cm] Lecture 2 Equations ...](https://static.fdocument.org/doc/165x107/622f8f3994946046a5727b7b/c52-elasticity-and-plasticity-1cm-lecture-2-equations-.jpg)