A GEOMETRIC APPROACH FOR CONSTRUCTING SRB …crm.sns.it/media/course/5245/Pisa-lectures.pdf · A...
29
A GEOMETRIC APPROACH FOR CONSTRUCTING SRB AND EQUILIBRIUM MEASURES IN HYPERBOLIC DYNAMICS YAKOV PESIN 1. Lecture I: Definition and ergodic properties of SRB measures 1.1. The setting. (1) f : M → M a C 1+α diffeomorphism of a compact smooth Riemann- ian manifold M ; (2) U ⊂ M an open subset with the property that f (U ) ⊂ U ; such a set U is called a trapping region ; (3) Λ = T n≥0 f n (U )a topological attractor for f ; we allow the case Λ= M . Λ is compact, f -invariant, and maximal (i.e., if Λ 0 ⊂ U is invariant, then Λ 0 ⊂ Λ). 1.2. Physical measures. μ an arbitrary probability measure on Λ. The basin of attraction of μ is B μ = x ∈ U : 1 n n-1 X k=0 h(f k (x)) → Z Λ h dμ for any h ∈ C 1 (M ) μ is a physical measure if m(B μ ) > 0. An attractor with a physical measure is often referred to as a Milnor attractor. 1.3. Hyperbolic measures. Given x ∈ Λ, v ∈ T x M , the Lyapunov expo- nent of v at x is χ(x, v) = lim sup n→∞ 1 n log kdf n vk. The function χ(x, ·) takes on finitely many values, χ 1 (x) ≤ ··· ≤ χ p (x), where p = dim M which are invariant functions, i.e., χ i (f (x)) = χ i (x) for every i. A Borel invariant measure μ on Λ is hyperbolic if χ i (x) 6= 0 and χ 1 (x) < 0 <χ p (x); that is χ 1 (x) ≤ ...χ k (x) < 0 <χ k+1 (x) ≤···≤ χ p (x) Date : May 22, 2017. 1
Transcript of A GEOMETRIC APPROACH FOR CONSTRUCTING SRB …crm.sns.it/media/course/5245/Pisa-lectures.pdf · A...

A GEOMETRIC APPROACH FOR CONSTRUCTING SRB
AND EQUILIBRIUM MEASURES IN HYPERBOLIC
DYNAMICS
YAKOV PESIN
1. Lecture I: Definition and ergodic properties of SRBmeasures
1.1. The setting.
(1) f : M →M a C1+α diffeomorphism of a compact smooth Riemann-ian manifold M ;
(2) U ⊂M an open subset with the property that f(U) ⊂ U ; such a setU is called a trapping region;
(3) Λ =⋂n≥0 f
n(U) a topological attractor for f ; we allow the caseΛ = M .
Λ is compact, f -invariant, and maximal (i.e., if Λ′ ⊂ U is invariant, thenΛ′ ⊂ Λ).
1.2. Physical measures. µ an arbitrary probability measure on Λ. Thebasin of attraction of µ is
Bµ =
{x ∈ U :
1
n
n−1∑k=0
h(fk(x))→∫
Λh dµ for any h ∈ C1(M)
}µ is a physical measure if m(Bµ) > 0. An attractor with a physical measureis often referred to as a Milnor attractor.
1.3. Hyperbolic measures. Given x ∈ Λ, v ∈ TxM , the Lyapunov expo-nent of v at x is
χ(x, v) = lim supn→∞
1
nlog ‖dfnv‖.
The function χ(x, ·) takes on finitely many values, χ1(x) ≤ · · · ≤ χp(x),where p = dimM which are invariant functions, i.e., χi(f(x)) = χi(x) forevery i.
A Borel invariant measure µ on Λ is hyperbolic if χi(x) 6= 0 and χ1(x) <0 < χp(x); that is
χ1(x) ≤ . . . χk(x) < 0 < χk+1(x) ≤ · · · ≤ χp(x)
Date: May 22, 2017.
1

2 YAKOV PESIN
for some k(x) ≥ 1. If µ is ergodic, then χi(x) = χi(µ) for a.e. x. Thenon-uniform hyperbolicity theory ensures that for a hyperbolic measure µand a.e. x ∈ Λ, the following are true.
(1) There is a splitting TxM = Es(x)⊕ Eu(x) where
Es(x) = Esf (x) = {v ∈ TxM : χ(x, v) < 0}, Eu(x) = Euf (x) = Esf−1(x)
are stable and unstable subspaces at x; they satisfy(a) dfEs(x) = Es(f(x)) and dfEu(x) = Eu(f(x));(b) ∠(Es(x), Eu(x)) ≥ K(x) for some Borel function K(x) > 0 on
Λ that satisfies condition (5) below.(2) There are local stable V s(x) and local unstable V u(x) manifolds at
x; these are C1+α submanifolds given as graphs
V s,u(x) = exp{
(v, ψs,u(v)) : v ∈ Bs,u(0, r(x)) ⊂ Es,u(x)}
of C1+α functions ψs,u defined in the ball Bs,u(0, r(x)) centered atzero of radius r(x) > 0 and mapping it into Eu,s(x); we have thatψs,u(0) = 0 and Dψs,u(0) = 0; these functions are constructed viathe Stable Manifold Theorem.
(3) The local stable and unstable manifolds at x satisfy
d(fn(x), fn(y)) ≤ C(x)λn(x)d(x, y), y ∈ V s(x), n ≥ 0,
d(f−n(x), f−n(y)) ≤ C(x)λn(x)d(x, y), y ∈ V u(x), n ≥ 0
for some Borel function C(x) > 0 on Λ that satisfies Condition (5)below, and some Borel f -invariant function 0 < λ(x) < 1.
(4) There are the global stable W s(x) and global unstable W u(x) mani-folds at x (tangent to Es(x) and Eu(x), respectively) so that
W s(x) =⋃n≥0
f−n(V s(fnx)), W u(x) =⋃n≥0
fn(V u(f−nx));
these manifolds are invariant under f , i.e., f(W s(x)) = W s(f(x))and f(W u(x)) = W u(f(x)).
(5) The functions C(x) and K(x) can be chosen to satisfy
C(f±1(x)) ≤ C(x)eε(x), K(f±1(x)) ≥ K(x)e−ε(x),
where ε(x) > 0 is an f -invariant Borel function.
(6) The size r(x) of local manifolds satisfies r(f±1(x)) ≥ r(x)e−ε(x).
One can show that W u(x) ⊂ Λ for every x ∈ Λ (for which the global unstablemanifold is defined).
Since λ(x) is invariant, it is constant µ-a.e. when µ is ergodic, so fromnow on we assume that λ(x) = λ is constant on Λ.
Given ` > 1, define regular set of level ` by
Λ` ={x ∈ Λ : C(x) ≤ `, K(x) ≥ 1
`
}.
These sets satisfy:

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 3
• Λ` ⊂ Λ`+1,⋃`≥1 Λ` = Λ;
• the subspaces Es,u(x) depend continuously on x ∈ Λ`; in fact, thedependence is Holder continuous:
dG(Es,u(x), Es,u(y)) ≤M`d(x, y)α,
where dG is the Grasmannian distance in TM ;• the local manifolds V s,u(x) depend continuously on x ∈ Λ`; in fact,
the dependence is Holder continuous:
dC1(V s,u(x), V s,u(y)) ≤ L`d(x, y)α;
• r(x) ≥ r` > 0 for all x ∈ Λ`.
1.4. SRB measures. We can choose ` such that µ(Λ`) > 0. For x ∈ Λ`and a small δ` > 0 set
Q`(x) =⋃
y∈B(x,δ`)∩Λ`
V u(y).
Let ξ` be the partition of Q`(x) by V u(y), and let V s(x) be a local stablemanifold that contains exactly one point from each V u(y) in Q`(x). Thenthere are conditional measures µu(y) on each V u(y), and a transverse mea-sure µs(x) on V s(x), such that for any h ∈ L1(µ) supported on Q`(x), wehave
(1.1)
∫h dµ =
∫V s(x)
∫V u(y)
h dµu(y) dµs(x).
Let mV u(y) denote the leaf volume on V u(y).
Definition 1.1. A measure µ on Λ is called an SRB measure if µ is hyper-bolic and for every ` with µ(Λ`) > 0, almost every x ∈ Λ` and almost everyy ∈ B(x, δ`) ∩ Λ`, we have the measure µu(y) is absolutely continuous withrespect to the measure mV u(y).
For y ∈ Λ`, z ∈ V u(y) and n > 0 set
ρun(y, z) =n−1∏k=0
Jac(df |Eu(f−k(z)))
Jac(df |Eu(f−k(y))).
One can show that for every y ∈ Λ` and z ∈ V u(y) the following limit exists
(1.2) ρu(y, z) = limn→∞
ρun(y, z) =
∞∏k=0
Jac(df |Eu(f−k(z)))
Jac(df |Eu(f−k(y)))
and that ρu(y, z) depends continuously on y ∈ Λ` and z ∈ V u(y).
Theorem 1.2. If µ is an SRB measure on Λ, then the density du(x, ·) of theconditional measure µu(x) with respect to the leaf-volume mV u(x) on V u(x)
is given by du(x, y) = ρu(x)−1ρu(x, y) where
ρu(x) =
∫V u(x)
ρu(x, y) dmu(x)(y)

4 YAKOV PESIN
is the normalizing factor.
In particular, we conclude that the measures µu(x) and mV u(y) must beequivalent.
The idea of describing an invariant measure by its conditional probabilitieson the elements of a continuous partition goes back to the classical work ofKolmogorov and especially later work of Dobrushin on random fields andrelation (1.2) can be viewed as an analog of the famous Dobrushin-Lanford-Ruelle equation in statistical physics.
1.5. Ergodic properties of SRB measures. Using results of nonuniformhyperbolicity theory one can obtain a sufficiently complete description ofergodic properties of SRB measures.
Theorem 1.3. Let f be a C1+α diffeomorphism of a compact smooth man-ifold M with an attractor Λ and let µ be an SRB measure on Λ. Then thereis a finite or countable collection of subsets Λ0,Λ1,Λ2, · · · ⊂ Λ such that
(1) Λ =⋃i≥0 Λi, Λi ∩ Λj = ∅;
(2) µ(Λ0) = 0 and µ(Λi) > 0 for i > 0;(3) f |Λi is ergodic for i > 0;(4) for each i > 0 there is ni > 0 such that Λi =
⋃nij=1 Λi,j where the
union is disjoint (modulo µ-null sets), f(Λi,j) = Λi,j+1, f(Λni,1) =Λi,1 and fni |Λi,1 is Bernoulli;
(5) if µ is ergodic, then the basin of attraction Bµ has positive Lebesguemeasure in U .
For smooth measures this theorem was proved by Pesin and an extensionto the general case was given by Ledrappier.
Statement 5 of Theorem 1.3 can be paraphrased as follows: ergodic SRBmeasures are physical. The converse is not true; physical measures need notbe SRB. Easy examples are given by (1) the Dirac measure on an attractingfixed point, which has all exponents negative and hence is not hyperbolic,and by (2) Lebesgue measure for an irrational circle rotation, which has zeroexponent but is still physical.
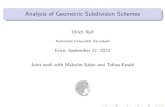
A more subtle example is given by the time-1 map of the flow illustratedin Figure 1, where the Dirac measure at the hyperbolic fixed point p is ahyperbolic physical measure whose basin of attraction includes all pointsexcept q1 and q2. (In fact, by slowing down the flow near p, one can adaptthis example so that p is an indifferent fixed point and hence, the physicalmeasure is not even hyperbolic.)
1.6. Characterization of SRB measures. The following result providesa complete characterization of SRB measures via their entropies.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 5
pq1
q2
Figure 1. A physical measure that is not SRB.
Theorem 1.4. A measure µ is an SRB measure if and only if the entropyhµ(f) of µ is given by the entropy formula:
hµ(f) =
∫Λ
∑χi(x)>0
χi(x) dµ(x).
For smooth measures (which are a particular case of SRB measures) theentropy formula was proved by Pesin and its extension to SRB measureswas given by Ledrappier and Strelcyn. The fact that a hyperbolic measuresatisfying the entropy formula is an SRB measure was shown by Ledrappier.
Remark 1.5. Our definition of SRB measure includes the requirement thatthe measure is hyperbolic. In fact, one can extend the notion of SRB mea-sures to those that have some or even all Lyapunov exponents zero (in thelatter case we take W u(x) = {x}). It was proved by Ledrappier and Youngthat a measure satisfies the entropy formula if and only if it is an SRB mea-sure in this more general sense, but we stress that such an SRB measuremay not be physical, i.e., its basin may be of zero Lebesgue measure.
It follows from Theorem 1.3 that f admits at most countably many ergodicSRB measures. One can show that a topologically transitive C1+α surfacediffeomorphism can have at most one SRB measure but the result is nottrue in dimension higher than two.
1.7. An overview of the geometric approach. The idea of the geo-metric approach is to follow the classical Bogolyubov-Krylov procedure forconstructing invariant measures by pushing forward a given reference mea-sure. In our case the natural choice of a reference measure is the Riemannianvolume m restricted to the neighborhood U , which we denote by mU . Wethen consider the sequence of probability measures
(1.3) µn =1
n
n−1∑k=0
fk∗mU .
Any weak* limit point of this sequence of measures is called a natural mea-sure and while in general, it may be a trivial measure, under some additionalhyperbolicity requirements on the attractor one obtains an SRB measure.

6 YAKOV PESIN
For attractors with some hyperbolicity one can use a somewhat differentapproach which exploits the fact that SRB measures are absolutely con-tinuous along unstable manifolds. To this end consider a point x ∈ Λ, itslocal unstable manifold V u(x), and take the leaf-volume mV u(x) as the ref-erence measure for the above construction. Thus one studies the sequenceof probability measures given by
(1.4) νn =1
n
n−1∑k=0
fk∗mV u(x).
The measures νn are spread out over increasingly long pieces of the globalunstable manifold of the point fn(x) and, in some situations, control overthe geometry of the unstable manifold makes it possible to draw conclusionsabout the measures νn by keeping track of their densities along unstablemanifolds, and ultimately to demonstrate that any weak-star limit of νn isin fact an SRB measure.
Every invariant measure µ can be obtained as the limit of the sequenceof measures (1.4) where the leaf-volume mV u(x) is replaced with an appro-priately chosen reference measure. This follows from a general result thatwe now present.
Let X be a compact topological space, f : X → X a continuous map,and µ a finite f -invariant ergodic Borel probability measure on X. Let alsoY ⊂ X be a Borel subset of positive measure and ξ a measurable partitionof Y . Consider the factor-measure µ in the factor space Y := Y/ξ and the
system of conditional measures {µy}. Here y runs over a subset Z ⊂ Yof full µ-measure and for each y ∈ Z the measure µy is supported on theelement C(y) of the partition ξ. We have that for any Borel subset E ⊂ Y
(1.5) µ(E) =
∫Y
∫C(y)
χE(y, z) dµy(z) dµ(y).
Without loss of generality we may assume that µy is normalized that isµy(C(y)) = 1.
Set A =⋃y∈Y \Z C(y). By (1.5), µ(A) = 0. Consider the set B of all
Birkhoff generic points x ∈ Y , for which
(1.6) limn→∞
1
n
n−1∑k=0
h(fk(x)) =
∫Xh dµ
for every continuous function h on X. Since µ is ergodic we have that Bhas full measure in Y . By (1.5), there is a set D ⊂ B of full measure in Ysuch that for every x ∈ D we have that µx(C(x) ∩ (A ∪ (Y \B))) = 0.
Fix x ∈ D and let ν be a probability measure on C(x), which is ab-solutely continuous with respect to µx, i.e., dν(y) = ρ(y) dµx(y) for someρ ∈ L1(C(x), µx). The measure ν can be extended to the measure ν on Xby setting ν(E) := ν(E ∩ C(x)) for any Borel set E ⊂ X.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 7
Consider a sequence {νn} of measures on X defined by
(1.7) νn :=1
n
n−1∑k=0
fk∗ ν.
Theorem 1.6. The sequence (1.7) converges in the weak∗ topology to themeasure µ.
Proof. Let κ be a weak∗ limit of (1.7), i.e. there exists a subsequence {n`}`∈Nsuch that for every continuous function h on X
(1.8)
∫Xh dκ = lim
`→∞
∫Xh dνn`
= lim`→∞
∫C(x)
1
n`
n`−1∑k=0
h ◦ fkdν.
Clearly κ is f -invariant. Since µ is ergodic, to show that κ = µ it suffices toprove that κ is absolutely continuous with respect to µ. To this end considera nonnegative continuous function h with
∫X h dµ = ε for some small ε > 0.
We will show that there exists a constant K > 0 that depends on ‖h‖ (theC0-norm of h) only such that
∫X h dκ < Kε.
Note that by (1.8), we have for all sufficiently large ` that
(1.9)
∣∣∣∣∣∫Xh dκ−
∫C(x)
1
n`
n`−1∑k=0
h(fk(y)) dν
∣∣∣∣∣ < ε.
It follows from (1.6) that there is a subset Xε ⊂ X with µ(X \Xε) ≤ ε anda number N = N(ε) > 0 such that for every y ∈ Xε and n` > N ,
(1.10)
∣∣∣∣∣ 1
n`
n`−1∑k=0
h(fk(y)) −∫Xh dµ
∣∣∣∣∣ < ε.
Since the measure ν is absolutely continuous with respect to the measure µx,we have that ν(C(x)∩(A∪(Y \B))) = 0. Therefore, setting Q := A∪(Y \B)

8 YAKOV PESIN
by (1.9) and (1.10), we obtain for n` > N that∫Xh dκ ≤
∫C(x)
1
n`
n`−1∑k=0
h(fk(y)) dν + ε
=
∫C(x)\Q
1
n`
n`−1∑k=0
h(fk(y)) dν + ε
=
∫(C(x)\Q)∩Xε
1
n`
n`−1∑k=0
h(fk(y)) dν
+
∫(C(x)\Q)\Xε
1
n`
n`−1∑k=0
h(fk(y)) dν + ε
≤∫C(x)\Q
(∫Xh dµ+ ε
)dν + ‖h‖
∫X\Xε
ρ dµx + ε
≤(∫
Xh dµ+ ε
)+ T‖h‖ε+ ε = (T‖h‖+ 3)ε,
where T > 0 is a constant. The desired result follows. �

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 9
2. Lecture II: The geometric approach for constructing SRBmeasures for uniformly hyperbolic attractors
2.1. Hyperbolic attractors. A (uniformly) hyperbolic attractor is a topo-logical attractor Λ which is a is (uniformly) hyperbolic set. The latter meansthat for each x ∈ Λ there is a decomposition TxM = Es(x) ⊕ Eu(x) andconstants c > 0, λ ∈ (0, 1) such that for each x ∈ Λ:
(1) ‖dxfnv‖ ≤ cλn‖v‖ for v ∈ Es(x) and n ≥ 0;(2) ‖dxf−nv‖ ≤ cλn‖v‖ for v ∈ Eu(x) and n ≥ 0.
Es(x) and Eu(x) are stable and unstable subspaces at x. They dependcontinuously on x and in fact, Holder continuously on x. In particular,∠(Es(x), Eu(x)) is uniformly away from zero.
For each x ∈ Λ there are V s(x) and V u(x) stable and unstable localmanifolds at x. They have uniform size r, depend continuously on x in theC1 topology.
Since Λ is an attractor and hence, is a locally maximal set within itstrapping region U , one can show that V u(x) ⊂ Λ for any x ∈ Λ. Thismeans that the hyperbolic attractor is a union of global unstable manifoldsof its points. On the other hand, the intersection of Λ with local unstablemanifolds of its points is a Cantor-like set unles Λ = M .
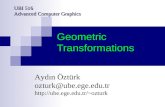
This is illustrated by the following example of a hyperbolic attractor.Consider the solid torus P = D2 × S1 and use coordinates (x, y, θ) on Psuch that x and y give the coordinates on the disc, and θ is the angularcoordinate on the circle.
Figure 2. The Smale-Williams solenoid.
Fixing a ∈ (0, 1) and α, β ∈ (0,min{a, 1 − a}), α ≤ β, define a mapf : P → P by
f(x, y, θ) = (αx+ a cos θ, βy + a sin θ, 2θ).
P is a trapping region and Λ =⋂n≥0 f
n(P ) is the attractor for f , known asthe Smale-Williams solenoid, see Figure 2. Observe that the intersection ofthe attractor with the transversal disk θ = 0 is a Cantor-like set. One canshow that the Hausdorff dimension of this set is log 2
log β .
2.2. Existence of SRB measures for hyperbolic attractors.
Theorem 2.1. Assume that f is C1+α and that Λ is a uniformly hyperbolicattractor. The following statements hold:

10 YAKOV PESIN
(1) Every limit measure of either the sequence of measures µn (given by(1.3)) or the sequence of measures νn (given by (1.4)) is an SRBmeasure on Λ.
(2) There are at most finitely many ergodic SRB measures on Λ.(3) If f |Λ is topologically transitive, then there is a unique SRB-measure
µ on Λ, which is the limit of both sequences µn and νn; moreover,Bµ has full measure in U .
This theorem was proved by Sinai for the case of Anosov diffeomorphisms,Bowen and Ruelle extended this result to hyperbolic attractors, and Bowenand Ruelle constructed SRB measures for Anosov flows.
We outline a proof of this theorem to demonstrate how the geometricapproach works. Note that the geometric proof we give here is not theoriginal proof given by Sinai, Bowen, and Ruelle, who used the symbolicapproach. Given x ∈ M , a subspace E(x) ⊂ TxM , and a(x) > 0, the coneat x around E(x) with angle a(x) is
K(x,E(x), a(x)) = {v ∈ TxM : ](v,E(x)) < a(x)}.
There exists a neighborhood U ⊂ U of the attractor Λ and two continuouscone families Ks(x) = Ks(x,Es(x), a) and Ku(x) = Ku(x,Eu(x), a) suchthat
df(Ku(x)) ⊂ Ku(f(x)) for all x ∈ U ,df−1(Ks(f(x))) ⊂ Ks(x) for all x ∈ f(U).
Note that the subspaces Es(x) and Eu(x) for x ∈ U need not be invariantunder df .
Let W ⊂ U be an admissible manifold ; that is, a submanifold that istangent to an unstable cone Ku(x) at some point x ∈ U and has a fixed sizeand uniformly bounded curvature. More precisely, fix constants γ, κ, r > 0,and define a (γ, κ)-admissible manifold of size r to be V (x) = expx graphψ,where ψ : BEu(x)(0, r) = B(0, r) ∩ Eu(x)→ Es(x) is C1+α and satisfies
(2.1)
ψ(0) = 0 and dψ(0) = 0,
‖dψ‖ := sup‖v‖<r
‖dψ(v)‖ ≤ γ,
|dψ|α := sup‖v1‖,‖v2‖<r
‖dψ(v1)− dψ(v2)‖‖v1 − v2‖α
≤ κ.
Write I = (γ, κ, r) for convenience and consider the space of admissiblemanifolds
RI = {expx(graphψ) : x ∈ U,ψ ∈ C1(Bu(0, r), Es(x)) satisfies (2.1)}.
Given an admissible manifold W , we consider a standard pair (W,ρ) whereρ is a continuous “density” function on W . The idea of working with pairs of

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 11
admissible manifolds and densities was introduced by Chernov and Dolgo-pyat and is an important recent development in the study of SRB measuresvia geometric techniques.
Now we fix L > 0, write K = (I, L), and consider the space of standardpairs
R′K = {(W,ρ) : W ∈ RI, ρ ∈ Cα(W, [ 1L , L]), |ρ|α ≤ L}.
These spaces are compact in the natural product topology: the coordinatesin RI are
{x ∈M,ψ ∈ C1(Bu(0, r), Es(x)) with ‖Dψ‖ ≤ γ, |Dψ|α ≤ κ}and the coordinates in R′K are
{x, ψ, ρ ∈ Cα(W ) with ‖ρ‖α ≤ L}.A standard pair determines a measure Ψ(W,ρ) on U in the obvious way:
Ψ(W,ρ)(E) :=
∫E∩W
ρ dmW .
Moreover, each measure η on R′K determines a measure Φ(η) on U by
(2.2)
Φ(η)(E) =
∫R′K
Ψ(W,ρ)(E) dη(W,ρ)
=
∫R′K
∫E∩W
ρ(x) dmW (x) dη(W,ρ).
(Compare this to (1.1) in the definition of conditional measures.) WriteM(U) and M(R′K) for the spaces of finite Borel measures on U and R′K,
respectively. It is not hard to show that Φ: M(R′K)→M(U) is continuous;in particular,MK = Φ(M≤1(R′K)) is compact, where we writeM≤1 for thespace of measures with total weight at most 1.
On a uniformly hyperbolic attractor, an invariant probability measure isan SRB measure if and only if it is in MK for some K.
Consider now the leaf volume mW on W that we view as a measure onU . Its evolution is the sequence of measures
(2.3) κn =1
n
n−1∑k=0
fk∗mW .
By weak* compactness there is a subsequence κnj that converges to aninvariant measure µ on Λ which is an SRB measure.
Consider the images fn(W ) and observe that for each n, the measurefn∗mW is absolutely continuous with respect to leaf volume on fn(W ). Forevery n, the image fn(W ) can be covered with uniformly bounded multi-plicity by a finite number of admissible manifolds Wi, so that
(2.4) fn∗mW is a convex combination of measures ρi dmWi ,
where ρi are Holder continuous positive densities on Wi. . This requires aversion of the Besicovitch covering lemma, which is usually formulated for

12 YAKOV PESIN
geometrical balls, so one must choose the Wi in such a way that each fn(Wi)is ‘sufficiently close’ to being a ball in fn(W ).
We see from (2.4) that MK is invariant under the action of f∗, andthus κn ∈ MK for every n. By compactness of MK, one can pass to asubsequence κnk
which converges to a measure µ ∈ MK, and this is thedesired SRB measure.
Choosing W = V u(x), x ∈ Λ we obtain that any limit measure of thesequence νn (see (1.4)) is an SRB measure. It is then not difficult to derivefrom here that any limit measure of the sequence µn (see (1.3)) is an SRBmeasure.
In the particular case when Λ = M (that is, f is a C1+α Anosov diffeo-morphism), the above theorem guarantees existence of an SRB measure µfor f . In fact, if f is topologically transitive one can show that µ is a uniqueSRB measure. Reversing the time we obtain the unique SRB measure ν forf−1. One can show that µ = ν if and only if µ is a smooth measure.
2.3. Non-uniformly hyperbolic attractors. If µ is an SRB measure,then every point in the positive Lebesgue measure set Bµ has non-zero Lya-punov exponents. A natural and interesting question is whether the converseholds true, in essence formulated in the following conjecture by Viana:
Conjecture 2.2. If a smooth map has only non-zero Lyapunov exponentsat Lebesgue almost every point, then it admits an SRB measure.
The first significant results on SRB measures for non-uniformly hyper-bolic systems were those for the attractors for certain special parameters ofthe Henon family of maps obtained Benedics and Carleson. These attrac-tors have a fully nonuniformly hyperbolic structure which can be describedrelatively explicitly and, taking advantage of several specific characteristicsof this structure, an SRB measure for the attractors was constructed firstby Benedics and Young.
2.4. Effective hyperbolicity. We make the following standing assump-tion.
(H) There exists a forward-invariant set A ⊂ U of positive volume withtwo measurable cone families Ks(x),Ku(x) ⊂ TxM such that
(a) Df(Ku(x)) ⊂ Ku(f(x)) for all x ∈ A;
(b) Df−1(Ks(f(x))) ⊂ Ks(x) for all x ∈ f(A).(c) Ks(x) = K(x,Es(x), as(x)) and Ku(x) = K(x,Eu(x), au(x))
are such that TxM = Es(x)⊕Eu(x); moreover ds = dimEs(x)and du = dimEu(x) do not depend on x.
Such cone families automatically exist if f is uniformly hyperbolic on Λ.We emphasize, however, that in our setting Ks,u are not assumed to becontinuous, but only measurable and the families of subspaces Eu,s(x) arenot assumed to be invariant.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 13
Let A ⊂ U be a forward-invariant set satisfying (H). Define
λu(x) = inf{log ‖Df(v)‖ | v ∈ Ku(x), ‖v‖ = 1},λs(x) = sup{log ‖Df(v)‖ | v ∈ Ks(x), ‖v‖ = 1}.
Note that if the splitting Es⊕Eu is dominated, then we have λs(x) < λu(x)for every x. Thus we define the defect from domination at x to be
∆(x) = 1α max(0, λs(x)− λu(x)),
where α ∈ (0, 1] is the Holder exponent of Df . Roughly speaking, ∆(x)controls how much the curvature of unstable manifolds can grow as we gofrom x to f(x). Indeed, if λs(x) > λu(x) then the action of Df can pushtangent vectors away from Eu and towards Es, so that the image of anunstable (or admissible) manifold can ‘curl up’ under the action of f , and∆(x) quantifies how much this can happen.
The following quantity is positive whenever f expands vectors in Ku(x)and contracts vectors in Ks(x):
λ(x) = min(λu(x)−∆(x),−λs(x)).
The upper asymptotic density of Γ ⊂ N is
δ(Γ) = lim supN→∞
1
N#(Γ ∩ [0, N)
).
An analogous definition gives the lower asymptotic density δ(Γ).Denote the angle between the boundaries of Ks(x) and Ku(x) by
θ(x) = inf{](v, w) : v ∈ Ku(x), w ∈ Ks(x)}.We say that a point x ∈ A is effectively hyperbolic if
lim infn→∞
1
n
n−1∑k=0
λ(fk(x)) > 0,(EH1)
limθ→0
δ{n | θ(fn(x)) < θ} = 0.(EH2)
Condition (EH1) says that not only are the Lyapunov exponents of x pos-itive for vectors in Ku and negative for vectors in Ks, but λu gives enoughexpansion to overcome the ‘defect from domination’ given by ∆.
Condition (EH2) requires that the frequency with which the angle be-tween the stable and unstable cones drops below a specified threshold θ canbe made arbitrarily small by taking the threshold to be small.
If Λ is a hyperbolic attractor for f , then every point x ∈ U is effectivelyhyperbolic, since there are λ, θ > 0 such that λs(x) ≤ −λ, λu(x) ≥ λ, andθ(x) ≥ θ for every x ∈ U , so that ∆(x) = 0 and λ(x) ≥ λ.
Let A satisfy (H), and let S ⊂ A be the set of effectively hyperbolicpoints. Observe that effective hyperbolicity is determined in terms of aforward asymptotic property of the orbit of x, and hence S is forward-invariant under f .

14 YAKOV PESIN
Theorem 2.3. Let f be a C1+α diffeomorphism of a compact manifold M ,and Λ a topological attractor for f . Assume that
(1) f admits measurable invariant cone families as in (H);(2) the set S of effectively hyperbolic points satisfies m(S) > 0.
Then f has an SRB measure supported on Λ.
A similar result can be formulated given information about the set of ef-fectively hyperbolic points on a single ‘approximately unstable’ submanifoldusually called admissible. The set of admissible manifolds that we will workwith is related to RI from the previous lecture, but the precise definitionis not needed for the statement of the theorem; all we need here is to haveTxW ⊂ Ku(x) for ‘enough’ points x. W ⊂ U . Let du, ds, and A be as in(H), (EH1) and (EH2), and let W ⊂ U be an embedded submanifold ofdimension du.
Theorem 2.4. Let f be a C1+α diffeomorphism of a compact manifold M ,and Λ a topological attractor for f . Assume that
(1) f admits measurable invariant cone families as in (H);(2) there is a du-dimensional embedded submanifold W ⊂ U such that
mW ({x ∈ S ∩W | TxW ⊂ Ku(x)}) > 0.
Then f has an SRB measure supported on Λ.
We outline the proof of this statement to illustrate the geometric approachin the settings of non-uniformly hyperbolic attractors and we follow the sameideas as in the case of uniformly hyperbolic attractors, but there are twomajor obstacles to overcome.
(1) The action of f along admissible manifolds is not necessarily uni-formly expanding.
(2) Given n ∈ N it is no longer necessarily the case that fn(W ) containsany admissible manifolds in RI, let alone that it can be covered bythem. When fn(W ) contains some admissible manifolds, we willneed to control how much of it can be covered.
To address the first of these obstacles, we need to consider admissible man-ifolds for which we control not only the geometry but also the dynamics;thus we will replace the collection R′K from before with a more carefullydefined set (in particular, K will include more parameters). Since we donot have uniformly transverse invariant subspaces Eu,s, our definition of anadmissible manifold also needs to specify which subspaces are used, and thegeometric control requires an assumption about the angle between them.
Given θ, γ, κ, r > 0, write I = (θ, γ, κ, r) and consider the following set of“(γ, κ)-admissible manifolds of size r with transversals controlled by θ”:
(2.5) PI = {expx(graphψ) | x ∈ f(U), TxM = G⊕ F, G ⊂ Ku(x),
∠(G,F ) ≥ θ, ψ ∈ C1+α(BG(r), F ) satisfies (2.1)}.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 15
Elements of PI are admissible manifolds with controlled geometry. We alsoimpose a condition on the dynamics of these manifolds. Fixing C, λ > 0,write J = (C, λ) and consider for each N ∈ N the collection of sets
(2.6) QJ,N = {fN (V0) | V0 ⊂ U, and for every y, z ∈ V0, we have
d(f j(y), f j(z)) ≤ Ce−λ(N−j)d(fN (y), fN (z)) for all 0 ≤ j ≤ N}.Elements of PI∩QJ,N are admissible manifolds with controlled geometry anddynamics in the unstable direction. We also need a parameter β > 0 thatcontrols the dynamics in the stable direction, and another parameter L > 0that controls densities in standard pairs. Then writing K = I ∪ J ∪ {β, L},we obtain a set RK,N ⊂ PI ∩ QJ,N for which we have the added restrictionthat we control the dynamics in the stable direction; the corresponding setof standard pairs is written R′K,N .
The set R′K,N carries a natural product topology in which R′K,N is com-
pact and the map Φ defined in (2.2) is continuous.As before, let M≤1(R′K,N ) denote the space of measures on R′K,N with
total weight at most 1. The resulting space of measures on U plays a centralrole:
(2.7) MK,N = Φ(M≤1(R′K,N )).
Measures inMK,N have uniformly controlled geometry, dynamics, and den-sities via the parameters in K, and MK,N is compact. However, at thispoint we encounter the second obstacle mentioned above: because f(W )may not be covered by admissible manifolds in RK,N , the set MK,N is notf∗-invariant.
To address this, one must establish good recurrence properties to MK,N
under the action of f∗ onM(U); this can be done via effective hyperbolicity.Consider for x ∈ A and λ > 0 the set of effective hyperbolic times
(2.8) Γeλ(x) =
{n |
n−1∑j=k
(λu −∆)(f j(x)) ≥ λ(n− k) for all 0 ≤ k < n
}.
Then for every x and almost every effective hyperbolic time n ∈ Γeλ(x), there
is a neighborhood W xn ⊂W containing x such that fn(W x
n ) ∈ PI ∩QJ,N .With a little more work, one can produce a “uniformly large” set of points
x and times n such that fn(W xn ) ∈ RK,N , and in fact fn∗mWx
n∈ MK,N .
Then this can be used to obtain measures νn ∈MK,N such that
(2.9) νn ≤ µn = 1n
∑n−1k=0 f
k∗mW and limn→∞ ‖νn‖ > 0.
Once this is achieved, compactness ofMK,N guarantees existence of a non-trivial ν ∈ ⋂NMK,N such that ν ≤ µ = limk µnk
. In order to apply theabsolute continuity properties of ν to the measure µ, one must define acollection Mac of measures with good absolute continuity properties alongadmissible manifolds, for which there is a version of the Lebesgue decompo-sition theorem that gives µ = µ(1)+µ(2), where µ(1) ∈Mac is invariant. This

16 YAKOV PESIN
measure is non-trivial since 0 6= ν ≤ µ(1), and the definition of R′K,N guar-antees that the set of points with non-zero Lyapunov exponents has positivemeasure with respect to ν, and hence also with respect to µ(1). Thus someergodic component of µ(1) is hyperbolic, and hence is an SRB measure.
2.5. Maps on the boundary of Axiom A: neutral fixed points. Wegive a specific example of a map for which the conditions of Theorem 2.4can be verified. Let f : U →M be a C1+α Axiom A diffeomorphism onto itsimage with f(U) ⊂ U , where α ∈ (0, 1). Suppose that f has one-dimensionalunstable bundle.
Let p be a fixed point for f . We perturb f to obtain a new map g that hasan indifferent fixed point at p. The case when M is two-dimensional and fis volume-preserving was studied by Katok. We allow manifolds of arbitrarydimensions and (potentially) dissipative maps. For example, one can choosef to be the Smale–Williams solenoid or its sufficiently small perturbation.
We describe a specific perturbation of f for which the conditions of themain theorem can be verified. We suppose that there exists a neighborhoodZ 3 p with local coordinates in which f is the time-1 map of the flowgenerated by
x = Ax
for some A ∈ GL(d,R). Assume that the local coordinates identify thesplitting Eu ⊕ Es with R ⊕ Rd−1, so that A = Au ⊕ As, where Au = γIduand As = −βIds for some γ, β > 0. In the Katok example we have d = 2and γ = β since the map is area-preserving.
Now we use local coordinates on Z and identify p with 0. Fix 0 < r0 < r1
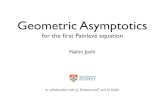
such that B(0, r1) ⊂ Z, and let ψ : Z → [0, 1] be a C1+α function such that(see Figure 3)
(1) ψ(x) = ‖x‖α for ‖x‖ ≤ r0;(2) ψ(x) = 1 for ‖x‖ ≥ r1;(3) ψ(x) > 0 for x 6= 0 and ψ′(x) > 0.
ψ(x)
‖x‖
1
r0
Figure 3. The function ψ.
Let X : Z → Rd be the vector field given by X (x) = ψ(x)Ax. Let g : U →M be given by the time-1 map of this vector field on Z and by f on U \ Z.Note that g is C1+α because X is C1+α. One can show that g satisfies theconditions of Theorem 2.4, which proves the following.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 17
Theorem 2.5. The map g has an SRB measure.
We also observe that if ψ is taken to be C∞ away from 0, then g is alsoC∞ away from the point p.

18 YAKOV PESIN
3. Lecture III: The geometric approach for constructingequilibrium measures
3.1. Equilibrium measures.
(1) X a compact topological space, f : X → X a continuous map, ϕ acontinuous function, the potential of the system.
(2) Bowen’s ball at a point x ∈ X of radius r > 0 and length n:
Bn(x, r) = {y ∈ X : d(fk(x), fk(y)) < r for all 0 ≤ k ≤ n}.(3) Topological pressure P (ϕ):
P (ϕ) := limr→0
lim infn→∞
1
nlogS(ϕ, n, r),
where
S(ϕ, n, r) = infU
{ ∑Bn(xi,r)∈U
(sup
y∈Bn(xi,r)
n−1∑k=0
ϕ(fk(y)))}
and the infimum is taken over all finite collections Un = {Bn(xi, r)}of Bowen’s balls of length n that cover X.
(4) Free energy : E(µ) = −(hµ(f) +
∫X ϕdµ
).
(5) Variational principle:
P (ϕ) = − inf E(µ) = sup{hµ(f) +
∫Xϕdµ
},
where hµ(f) is the Kolmogorov-Sinai entropy of µ and the infimumand supremum are taken over the set M(f,X) of all f -invariantBorel probability measures on X.
(6) Equilibrium measure µϕ: an extreme of the variational principle thatis
(3.1) P (ϕ) = hµϕ(f) +
∫Xϕdµϕ.
Uniqueness of equilibrium measures is interpreted as “absence of phase tran-sitions”.
3.2. Equilibrium measures on locally maximal hyperbolic sets. Letf be a diffeomorphism of compact smooth Riemannian manifold M and Λa (uniformly) hyperbolic set. We say that Λ is locally maximal if there is aneighborhood U of Λ such that if A ⊂ U is an invariant set, then A ⊂ Λ.Onecan show that Λ is locally maximal if and only if for any x, y ∈ Λ for whichthe intersection [x, y] := V s(x) ∩ V u(y) 6= ∅, then [x, y] ∈ Λ.
Throughout this lecture we assume that Λ is a locally maximal(uniformly)hyperbolic set. We say that the map f |Λ is topologically transitive if thereis a point x ∈ Λ whose trajectory {fn(x)} is dense in Λ. One can showthat topological transitivity is equivalent to the fact that given two opensets U, V ⊂ Λ there is n ∈ Z such that fn(U) ∩ V 6= ∅.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 19
Consider a Holder continuous potential ϕ that is
|ϕ(x)− ϕ(y)| ≤ Cd(x, y)α
for some C > 0 and 0 < α < 1.
Theorem 3.1. Assume that f |Λ is topologically transitive. Then there is aunique equilibrium measure µϕ for ϕ.
Uniqueness implies that the measure µϕ is ergodic. In fact, it has manystrong ergodic properties such as the Bernoulli property (up to a rotation),exponential decay of correlations and the Central Limit Theorem.
3.3. Caratheorody dimension structure. Let X be a set and F a col-lection of subsets of X which we call admissible sets. Assume that thereexist two set functions η, ψ : F → [0,∞) satisfying the following conditions:
(A1) ∅ ∈ F ; η(∅) = ψ(∅) = 0 and η(U), ψ(U) > 0 for any U ∈ F , U 6= ∅;(A2) for any δ > 0 one can find ε > 0 such that η(U) ≤ δ for any U ∈ F
with ψ(U) ≤ ε;(A3) there exists ε > 0 such that for any ε ≥ ε > 0, one can find a finite
subcollection G ⊂ F covering X such that ψ(U) = ε for any U ∈ G.
Let ξ : F → [0,∞) be a set function. We say that the collection of subsetsF and the functions ξ, η, ψ, satisfying Conditions (A1), (A2) and (A3) in-troduce a Caratheodory dimension structure or C-structure τ on X and wewrite τ = (F , ξ, η, ψ).
For any subcollection G ⊂ F denote by ψ(G) := sup{ψ(U)|U ∈ G}. Givena set Z ⊂ X and numbers α ∈ R and ε > 0, define
MC(Z,α, ε) := infG,ψ(G)≤ε
{∑U∈G
ξ(U)η(U)α
},
RC(Z,α, ε) := infG,ψ(G)=ε
{∑U∈G
ξ(U)η(U)α
},
where the infimum is taken over all finite or countable subcollections G ⊂ Fcovering Z. Set
mC(Z,α) := limε→0
MC(Z,α, ε),
rC(Z,α) := limε→0RC(Z,α, ε),
rC(Z,α) := limε→0RC(Z,α, ε).
If mC(∅, α) = 0, then the set function mC(·, α) becomes an outer measureon X, which induces a measure on the σ-algebra of measurable sets. We callthis measure the α-Caratheodory measure. In general, this measure may notbe σ-finite or it may be a zero measure.
Proposition 3.2. For any set Z ⊂ X there exist critical values αC ≤ αC ≤αC ∈ R such that:
(1) mC(Z,α) = ∞ for α < αC and mC(Z,α) = 0 for α > αC (whilemC(Z,αC) may be 0, ∞, or a finite positive number);

20 YAKOV PESIN
(2) rC(Z,α) = ∞ for α < αC and rC(Z,α) = 0 for α > αC (whilerC(Z,αC) may be 0, ∞, or a finite positive number);
(3) rC(Z,α) = ∞ for α < αC and rC(Z,α) = 0 for α > αC (whilerC(Z,αC) may be 0, ∞, or a finite positive number).
We call the quantities
dimC Z = αC , CapCZ = αC , CapCZ = αC .
the Caratheodory dimension and lower and upper Caratheodory capacitiesof the set Z respectively.
A C-structure can be generated by other structures on the set X. Forexample if X is a metric space, then consider the C-structure given by
F := {open sets}, ξ(U) = 1, η(U) = ψ(U) = diamU.
For any Z ⊂ X we have that
dimC Z = dimH Z, CapCZ = dimBZ, CapCZ = dimBZ,
where dimH Z is the Hausdorff dimension and dimBZ, dimBZ are respec-tively, the lower and upper box dimensions of Z.
3.4. Caratheodory measures on local unstable manifolds. We con-sider again a diffeomorphism f with a locally maximal hyperbolic set Λand let ϕ be a Holder continuous function on Λ. We introduce a particularC-structure on local unstable manifolds associated with ϕ.
Fix x0 ∈ Λ and consider the local unstable manifold V u := V u(x0). Forx ∈ Λ, n ∈ N, and ε > 0 define
Bun(x, ε) := {y ∈ V u(x) ∩ Λ : d(fk(y), fk(x)) < ε for k = 0, . . . , n},
Bu(x, ε) := Bu0 (x, ε) = {y ∈ V u(x) ∩ Λ : d(y, x) < ε}.
The set Bun(x, ε) is Bowen’s ball in the local unstable manifold which we call
u-Bowen’s ball.Recall that a continuous map of a topological space X is expansive is
there is number δ0 > 0, called the expansivity constant, such that no twotrajectories can stay within the distance δ0 from each other, i.e., if for somex, y ∈ Λ we have that d(fn(x), fn(y) ≤ δ0 for all n ∈ Z, then x = y. Onecan show that the map f |Λ is expansive.
Set X := V u∩Λ. Let δ0 be the expansivity constant for f . We fix a smallnumber 0 < r < δ0 and define the collection F of admissible sets by
F := {∅} ∪ {Bun(x, r) : x ∈ V u ∩ Λ, n ∈ N}.
Given x ∈ V u ∩ Λ and n ∈ N, we define
ξ(Bun(x, r)) := exp
(n−1∑k=0
ϕ(fk(x))
),
η(Bun(x, r)) := e−n, ψ(Bu
n(x, r)) :=1
n,

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 21
and also set η(∅) = ψ(∅) = ξ(∅) = 0. It is easy to see that the collection ofsubsets F and the functions ξ, η, ψ satisfy Conditions (A1), (A2) and (A3),and hence, introduce the Caratheodory dimension structure in X.
Let P = P (ϕ) be the topological pressure of ϕ and let mu := mC(·, P )denote the P -Caratheodory measure on X. For every set Z ⊂ X we havethat
(3.2) mu(Z) = limN→∞
inf{Bu
ni(xi,r)}
{∑i
exp
(−Pni +
ni−1∑k=0
ϕ(fk(xi))
)},
where the infimum is taken over all collections {Buni
(xi, r)} of Bowen’s u-balls with xi ∈ X, ni ≥ N , which cover Z that is Z ⊂ ⋃iB
uni
(xi, r). Wehave the following.
Theorem 3.3. The P -Caratheodory measure mu given by (3.2) is finiteand non-trivial independently of the choice of the number r provided it issufficiently small.
As an immediate corollary of this statement we obtain that for any setZ ⊂ X of positive mu-measure we have that dimC Z = P . One can indeed,show that
dimC Z = CapCZ = CapCZ = P.
Proof of Theorem 3.3. We need the following three facts about locally max-imal hyperbolic sets.
1. A finite set E ⊂ Λ is called (n, δ)-separated if for every x ∈ Λ there isa point y ∈ E such that for all 0 ≤ k ≤ n we have that d(fk(x), fk(y)) ≤ δ.
For any δ > 0 and a subset Y ⊂ Λ let
(3.3) N(Y, δ, n) := sup
{∑x∈E
eSnϕ(x)
},
where the supremum is taken over all (δ, n)-separated subsets E ⊂ Y . Onecan show that
(1) The topological pressure of ϕ on Λ by
P (ϕ) := limδ→0
limn→∞
1
nlogN(Λ, δ, n).
(2) For any 0 < δ < δ0/3 there exists C = C(δ) > 0 such that
(3.4) C−1enP ≤ N(Λ, n, δ) ≤ CenP .2. A diffeomorphism f on Λ has the specification property that is for every
δ ≥ 0 there is an integer T (δ) for which the following is true: if I1, . . . , Inare intervals of integers contained in [a, b] with d(Ii, Ij) ≥ T (δ) for i 6= j
and x1, . . . , xn ∈ Λ, then there is a point x ∈ Λ with f b−a+T (δ)(x) = x andd(fk(x), fk(xi)) < δ for k ∈ Ii.

22 YAKOV PESIN
3. A Holder continuous function ϕ on Λ has Bowen’s property that isthere exist K > 0 and ε > 0 such that for every x ∈ Λ and n > 0 ify ∈ Bn(x, ε), then |Snϕ(x)− Snϕ(y)| ≤ K.
We proceed with the proof of the theorem. Fix x0 ∈ Λ and set V :=V u(x0). Let EN be a maximal (N, r4)-separated set in Λ. Then {BN (x, r2) :
x ∈ EN} is a cover of Λ. In particular, V ∩ Λ ⊂ ⋃`i=1BN (xi,
r2) for some
x1, . . . , x` ∈ EN . For i = 1, . . . , ` pick zi ∈ V ∩ Λ such that zi ∈ BN (xi,r2).
Then V ∩ Λ ⊂ ⋃`i=1B
uN (zi, r). Using Bowen’s property, (3.3), and (3.4), we
obtain that
inf
{∑i
exp (−Pni + SNϕ(yi)) : yi ∈ V ∩ Λ, E ⊂⋃i
BuN (yi, r)
}
≤∑i=1
exp (−PN + SNϕ(zi)) ≤ eK−PN∑i=1
eSNϕ(xi)
≤ eK−PNN(Λ,r
4, N) ≤ eK−PNC(
r
4)eNP ≤ eKC(
r
4).
We conclude that mC(V, P ) <∞.We shall prove that the measure of Λ is not zero. To this end consider
y ∈ Λ, n ∈ N and M > n. By Lemma 3.4, we have
eSnϕ(y)−nP ≥ eSnϕ(y)e−MPC−1(r)N(Λ, r,M − n)
≥ eSnϕ(y) C−2(r)
N(Λ, r,M)N(fn(Bu
n(y, r)), r,M − n)
≥ e−K C−2(r)
N(Λ, r,M)N(Bu
n(y, r), r,M).
Consequently, for any finite cover {Buni
(yi, r)}i of V ∩Λ and M > maxi{ni}we obtain that∑
i
exp(−Pni + Sniϕ(yi)) ≥ C∑i
N(Buni
(yi, r), r,M)
N(Λ, r,M)
≥ CN(Or, r,M)
N(Λ, r,M),
where
Or(V ) :=
x ∈ ⋃y∈V
V s(y) ∩ Λ : dist(x, V ) < r
.
Let T = T (r) be a constant from the specification property and let M >T and m = M − T . Consider a maximal (m, 3r)− separated set Em.For every x ∈ Em there exists p(x) ∈ Or(V ) such that fM (p) = p anddm(fT (p(x)), x) ≤ r. Note that the set {p(x) : x ∈ Em} is (M, r)-separated.

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 23
We then obtain that
N(Or, r,M)
N(Λ, r,M)≥ 1
N(Λ, r,M)
∑x∈Em
eSMϕ(p(x))
≥ e−K−T‖ϕ‖C0
N(Λ, r,M)
∑x∈Em
eSmϕ(x)
=e−K−T‖ϕ‖C0
N(Λ, r,M)N(Λ, 3r,m)
≥ e−K−T‖ϕ‖C0C−1(3r)emPC−1(r)e−MP ≥ C(r).
We conclude that mC(V, P ) > 0. To prove the first statement note thatboth estimates hold if we replace ni by n and that the outer measure ismetric, hence Borel. �
3.5. The evolution of the measure mu under the dynamics. Themeasure mu on V u can be extended to a measure mu on Λ by settingmu(A) := mu(A ∩ V u) for any measurable set A ⊂ Λ. Consider the se-quence {mu
n} of measures on Λ defined by
(3.5) mun :=
1
n
n−1∑k=0
fk∗ mu.
Theorem 3.4. Let Λ be a locally maximal hyperbolic set for a diffeomor-phism f . Assume that f |Λ is topologically transitive. Then the sequence(3.5) converges in the weak∗ topology to a measure µϕ which is the uniqueequilibrium measure for the potential ϕ.
Proof. Fix a number n > 0, a point x0 ∈ Λ and let V = V u(x0). Recallthat V has a fixed size τ > 0. Denote by Vn := fn(V ) and let mVn be theP -Caratheodory measure on Vn that is for Z ⊂ Vn,
(3.6) mVn(Z) = limN→∞
inf
{∑i
exp (−Pni + Sniϕ(xi))
},
where the infimum is taken over all xi ∈ Vn ∩ Λ with ni ≥ N such thatZ ⊂ ⋃iB
uni
(xi, r).We also consider the measure fn∗mV on Vn, where for E ⊂ Vn we set
fn∗mV (E) = mV (f−n(E)). For x ∈ Vn define
gn(x) := exp(−Pn+−1∑
k=−nϕ(fk(x))).
Lemma 3.5. For every Borel set E ⊂ Vn we have that∫Egn(x)dmVn = fn∗mV (E).
We need the following version of the Besicovich Covering Lemma.

24 YAKOV PESIN
Lemma 3.6. There are points y(i)n ∈ Vn, i = 1, . . . , s such that
(1) the sets V(i)n := V (y
(i)n ) form an open cover of Vn of finite multiplic-
ity, which depends only on the dimension of Vn;
(2) the balls Bu(y(i)n , 1
4τ) ⊂ V in are disjoint.
This result allows us to partition Vn by the sets V(1)n , . . . , V
(s)n , where
(3.7) V (i)n := V (i)
n \i−1⋃j=1
V (j)n .
Consequently, Lemma 3.5 gives that for every Borel set E ⊂ Vn,
(3.8)
fn∗mV (E) =
∫Egn(x)dmVn =
s∑i=1
∫Egn(x) dm
V(i)n
=s∑i=1
gn(y(i)n )
∫E
gn(x)
gn(y(i)n )
dmV
(i)n.
We have the following statement.
Lemma 3.7. There exists L = L(τ,dim(V )) > 0 such that for every n ∈ Nand every cover as in Lemma 3.6 we have that:
(1) gn(x)
gn(y(i)n )∈ Cα(V
(i)n , [ 1
L , L]);
(2)
∣∣∣∣ gn(x)
gn(y(i)n )
∣∣∣∣α
≤ L;
(3)∑s
i=1 gn(y(i)n ) < L.
For the rest of the proof fix L > 0 and let
R := {W \p′⋃i=1
V (yi) : 0 ≤ p′ ≤ p, y1, y2, . . . , yp′ ∈ Λ},
where p is the bound on multiplicity in Lemma 3.6.We now define the space of standard pairs:
R′ :={
(V , ρ) : V ∈ Ru, ρ ∈ Cα(V , [1/L,L]), |ρ|α ≤ L}.
We endowR′ with the natural product topology of the space of local unstablemanifolds V and the space Cα(V , [1/L,L]). It is easy to see that R′ iscompact in this topology.
A standard pair determines a measure Ψ(V , ρ) on Λ:
(3.9) Ψ(V , ρ)(E) :=
∫E∩V
ρ dmV .
Moreover, each finite measure η on R′ determines a measure Φ(η) on Λ by
(3.10) Φ(η)(E) :=
∫R′
Ψ(V , ρ)(E) dη(V , ρ) =
∫R′
∫E∩V
ρ dmV dη(V , ρ).

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 25
Write M(Λ) and M(R′) for the spaces of finite Borel measures on Λ andR′ respectively. One can see that Φ : M(R′) → M(Λ) is continuous. Inparticular, M := Φ(M≤L(R′)) is compact, where we write M≤L for thespace of measures of total weight at most L.
Consider the sequence of measures (3.5). We see from (3.8) that for everyk ∈ N and E ∈ Vk,
fk∗mV (E) =
s∑i=1
gk(y(i)k )
∫E
gk(x)
gk(y(i)k )
dmV
(i)k
.
Taking ρik := gn(x)
gn(y(i)n )
, Lemma 3.7 implies that each pair (V(i)k , ρik) is in R′.
In addition, we can define a measure ηk on R′ by setting
ηk((V(i)k , ρik)) = gk(y
(i)k ).
The last statement of Lemma 3.7 implies that ηk(R′) ≤ L. Consequently,fk∗mV (E) ∈M. The same is true for the average, i.e., mn ∈M for every n.
By compactness of M one can pass to a convergent subsequence mnk→
µ ∈M. We have the following statement.
Lemma 3.8. The measure µ is an equilibrium measure for ϕ. Moreover,the conditional measures generated by µ on the local unstable leaves V u(x)are equivalent to the P -Caratheodory measure mu on V u(x).
This completes the proof of the theorem subject to the proofs of Lemmas3.5, 3.7, and 3.8.
Proof of Lemma 3.8. The claim that the conditional measures generated byµ on the local unstable leaves V u(x) are equivalent to the P -Caratheodorymeasure mu on V u(x) immediately follows from the fact that by constructionµ ∈M.
Let x be a generic point for µ and let δ > 0. We need the following result.
Lemma 3.9. There exist C > 0 such that for every n ∈ N,
C−1 exp(−Pn+n−1∑k=0
ϕ(fk(x))) < µ(Bn(x, δ))
< C exp(−Pn+
n−1∑k=0
ϕ(fk(x))).
Proof. Consider the partition ξ of B(x, δ) by local unstable leaves. Thereexists a factor-measure µ in the factor space B(x, δ)/ξ and the system ofconditional measures µV (y), y ∈ B(x, δ)/ξ such that,
µ(Bn(x, δ)) =
∫B(x,δ)/ξ
∫V (y)
χBn(x,δ)(y, z) dµV (y)(z) dµ(y).

26 YAKOV PESIN
Since µ ∈M, there exists ρ ∈ Cα(V, [1/L,L]) such that we can write,
µ(Bn(x, δ)) =
∫B(x,δ)/ξ
∫V (y)
ρχBn(x,δ)(y, z) dµV (y)(z) dµ(y)
≤ L∫B(x,δ)/ξ
∫V (y)
χBn(x,δ)(y, z) dmV (y)(z) dµ(y)
= L
∫B(x,δ)/ξ
mV (y)
(f−n(V (fn(y)) ∩B(fn(x), δ))
)dµ(y)
= L
∫B(x,δ)/ξ
fn∗mV (y)(B(fn(x), δ)) dµ(y).
By Lemma 3.5, we may continue
= L
∫B(x,δ)/ξ
∫B(fn(x),δ)
gn(z) dmV (fn(y))(z) dµ(y)
(3.11)
≤ L∫B(x,δ)/ξ
eK exp(−Pn+n−1∑k=0
ϕ(fk(x)))mV (fn(y))(B(fn(x), δ)) dm(y).
By Theorem 3.3, we have that
mV (fn(y))(B(fn(x), δ)) ≤ mV (fn(y))(B(fn(y), 2δ)) ≤ C(2δ).
Therefore, (3.11) can be estimated by C exp(−Pn + Snϕ(x)) with someC = C(x, δ) > 0.
From the above argument it is clear how to obtain the reverse inequalityin (3.11). Namely, we have that
µ(Bn(x, δ))
≥ 1/L
∫B(x,δ)/ξ
e−K exp(−Pn+ Snϕ(x))mV (fn(y))(B(fn(x), δ)) dµ(y)
≥ 1/L
∫B(x, 1
2δ)/ξ
e−K exp(−Pn+ Snϕ(x))mV (fn(y))(B(fn(x), δ)) dµ(y).
Observe that if fn(y) ∈ B(fn(x), 12δ), then
V (fn(y)) ∩B(fn(y),1
2δ) ⊂ V (fn(y)) ∩B(fn(x), δ).
Consequently, Theorem 3.3 implies that
mV (fn(y))(B(fn(x), δ)) ≥ mV (fn(y))(B(fn(y),1
2δ)) ≥ C−1(
1
2δ).
We then conclude that
µ(Bn(x, δ)) ≥ C−1 exp(−Pn+ Snϕ(x))
and the desired result follows. �

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 27
To finish the proof of Lemma 3.8 observe that by Lemma 3.9,
limn→∞
− logµ(Bn(x, δ))
n= lim
n→∞
− log exp(−Pn+ Snϕ(x))
n
= limn→∞
(Pn
n− 1
n
n−1∑k=0
ϕ(fk(x))
)= P −
∫Λϕdµ.
By the Brin-Katok formula for the metric entropy, this implies that
P = hµ(f) +
∫Λϕdµ
and hence, µ is an equilibrium measure. �
�

28 YAKOV PESIN
4. Lecture IV: The geometric approach for constructing SRBmeasures for uniformly hyperbolic attractors with
singularities
4.1. Maps with singularities. Let M be a smooth compact manifold,U ⊂ M an open bounded connected subset, the trapping region, N ⊂ U aclosed subset and f : U \N → U a C2 diffeomorphism such that
(4.1)‖d2fx‖ ≤ C1d(x,S+)−α1 for any x ∈ U \N,‖d2f−1
x ‖ ≤ C2d(x,S−)−α2 for any x ∈ f(U \N),
where S+ = N ∪ ∂U is the singularity set for f and S− = f(S+) that is
S− = {y ∈ U : there is z ∈ S+, zn ∈ U\S+ such that zn → z, f(zn)→ f(z)}is the singularity set for f−1. We will assume that m(S+) = m(S−) = 0.
Define
U+ = {x ∈ U : fn(x) /∈ S+, n = 1, 2, . . . }and the topological attractor with singularities
D =⋂n≥0
fn(U+), Λ = D.
Given ε > 0 and ` > 1, set
D+ε,` = {z ∈ Λ : d(fn(z),S+) ≥ `−1e−εn, n = 0, 1, 2, . . . },
D−ε,` = {z ∈ Λ : d(fn(z), N−) ≥ `−1e−εn, n = 0, 1, 2, . . . },D0ε,` = D+
ε,`
⋂D−ε,`,
D0ε =
⋃`≥1
D0ε,`.
The set D0ε is the core of the attractor and it may be an empty set as it may
be the set D.
Theorem 4.1. Assume that there are C > 0 and q > 0 such that for anyε > 0 and n > 0
(4.2) m(f−n(U(ε,S+) ∩ fn(U+))) ≤ Cεq,where U(ε,S+) is a neighborhood of the (closed) set S+. Then there is aninvariant measure µ on Λ such that, µ(D0
ε) > 0, in particular, the core isnot empty.
4.2. Hyperbolic attractors with singularities. We say that a topolog-ical attractor with singularities Λ is hyperbolic, if there exist two families ofstable and unstable cones
Ks(x) = K(x,E1(x), θ(x)), Ku(x) = K(x,E2(x), θ(x)), x ∈ U \ S+
such that
(1) the angle ∠(E1(x), E2(x)) ≥ const. ;

THE GEOMETRIC APPROACH FOR CONSTRUCTING SRB MEASURES 29
(2) df(Ks(x)) ⊂ Ks(f(x)) for any x ∈ U \ S+ and df−1(Ku(x)) ⊂Ku(f(x)) for any x ∈ f(U \ S+);
(3) for some λ > 1(a) ‖dfxv‖ ≥ λ‖v‖ for x ∈ U \ S+ and v ∈ Ku(x);(b) ‖df−1
x v‖ ≥ λ‖v‖ for x ∈ f(U \ S+) and v ∈ Ks(x).
Theorem 4.2. Let Λ be a hyperbolic attractor with singularities for a C1+α
map and assume that Condition (4.2) holds. Then f admits an SRB measureon Λ.
4.3. Examples of hyperbolic attractors with singularities. We de-scribe the following three examples of hyperbolic attractors with singularitieswhich satisfy requirements (4.1) and (4.2) and thus possess SRB measures.
The geometric Lorenz attractor. Let I = (−1, 1), U = I × I, N =I × 0 ⊂ U and f : U \N → U is given by
f(x, y) = ((−B|y|ν0 +Bsign(y)|y|ν + 1)sign(y), ((1 +A)|y|ν0 −A)sign(y)),
where
0 < A < 1, 0 < B <1
2, ν > 1,
1
1 +A< ν0 < 1.
This attractor models the behavior of the Poicare map on an appropriatelychosen cross-section for the flow generated by the Lorenz system of ODE:
x = −σx+ σy, y = rx− y − xz, z = xy − bzfor the values of the parameters σ = 10, b = 8
3 and r ∼ 24.05. TheLozi attractor. Let I = (−c, c) for some 0 < c < 1 and let U = I × I,N = 0× I ⊂ U and f : U \N → U is given by
f(x, y) = (1 + by − a|x|, x),
where 0 < a < a0 and 0 < b < b0 for some small a0 > 0 and b0 > 0.Up to a change of coordinates this map was introduced by Lozi as a simple
version of the famous Henon map in population dynamics.The Belykh attractor. Let I = (−1, 1), U = I × I, N = {(x, y) : y =
kx} ⊂ U and f : U \N → U is given by
f(x, y) =
{(λ1(x− 1) + 1, λ2(y − 1) + 1) for y > kx,
(µ1(x+ 1)− 1, µ2(y + 1)− 1) for y < kx,
where
0 < λ1, µ1 <1
2, 1 < λ2, µ2 <
2
1− |k| , |k| < 1.
In the case λ1 = µ1 and λ2 = µ2 this map was introduced by Belykh as oneof the simplest models in the phase synchronization theory in radiophysics.
Department of Mathematics, McAllister Building, Pennsylvania State Uni-versity, University Park, PA 16802, USA
E-mail address: [email protected]: http://www.math.psu.edu/pesin/