
7. Strukturmechanische Schwingungen mit der Finiten ... · xhy x hy xy h xyh xy x yOh h Oh h ψψ...
15
www.kbraeuer.de Tübingen, den 16.02.2009 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode oder: Kann man die Form einer Trommel hören? (Kurt Bräuer) 7.1 Motivation der Methode der Finiten Elemente Physikalische Theorien führen in aller Regel zu Feldgleichungen in Form partieller Differential- Gleichungen. Einige fundamentale Beispiele sind: Klassische Mechanik: Wellengleichung Hamilton-Jakobi-Gleichung Euler-Gleichung der Strukturmechanik Navier-Stokes-Gleichung der Hydrodynamik Quantenmechanik: Schrödinger-Gleichung Klein-Gordon-Gleichung Dirac-Gleichung Elektrodynamik: Maxwell-Gleichungen Thermodynamik: Liouville-Gleichung Bolzmann-Gleichung Focker-Planck-Gleichung In wenigen Spezial- oder Näherungsfällen können diese Gleichungen analytische gelöst werden. Bei numerischen Lösungsansätzen ist man mit dem Problem konfrontiert, partielle Ableitungen der Felder bestimmen zu müssen, obwohl diese gar nicht bekannt sind. Trotzdem ist das zu schaffen, indem man die Felder in vollständige Orthonormalsysteme entwickelt. Zum Beispiel ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 2 , 1 , 1 , , sin sin sin sin mn n mn mn xy x y c m x n y m n c mx ny ψ ψ π π ∞ ∞ = = ≡ Δ =Δ = − + ∑ ∑ . (1) Damit sind die partiellen Ableitungen behandelt und man kommt insgesamt zu gekoppelten ge- wöhnlichen Differentialgleichungen. Eine weitere Möglichkeit zur Behandlung partieller Differentialgleichungen besteht in der Bil- dung Finiter Differenzen. Zum Beispiel ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 2 1 1 1 1 2 2 , , , , 4 , , , oder in einem diskretisierten Raum 4 . ij i j i j ij ij ij x hy x hy xy h xy h xy x y Oh h Oh h ψ ψ ψ ψ ψ ψ ψ ψ ψ ψ ψ ψ + − + − + + − + + + − − Δ = + + + + − Δ = + . (2)
Transcript of 7. Strukturmechanische Schwingungen mit der Finiten ... · xhy x hy xy h xyh xy x yOh h Oh h ψψ...

www.kbraeuer.de Tübingen, den 16.02.2009
7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode
oder: Kann man die Form einer Trommel hören?
(Kurt Bräuer)
7.1 Motivation der Methode der Finiten Elemente
Physikalische Theorien führen in aller Regel zu Feldgleichungen in Form partieller Differential-Gleichungen. Einige fundamentale Beispiele sind:
Klassische Mechanik: Wellengleichung Hamilton-Jakobi-Gleichung Euler-Gleichung der Strukturmechanik Navier-Stokes-Gleichung der Hydrodynamik
Quantenmechanik: Schrödinger-Gleichung Klein-Gordon-Gleichung Dirac-Gleichung
Elektrodynamik: Maxwell-Gleichungen
Thermodynamik: Liouville-Gleichung Bolzmann-Gleichung Focker-Planck-Gleichung
In wenigen Spezial- oder Näherungsfällen können diese Gleichungen analytische gelöst werden.
Bei numerischen Lösungsansätzen ist man mit dem Problem konfrontiert, partielle Ableitungen der Felder bestimmen zu müssen, obwohl diese gar nicht bekannt sind. Trotzdem ist das zu schaffen, indem man die Felder in vollständige Orthonormalsysteme entwickelt. Zum Beispiel
( ) ( ) ( )
( )
( ) ( ) ( )2 2
, 1 , 1
,
, sin sin sin sinmn nm n m n
x y
x y c m x n y m n c mx ny
ψ
ψ π π∞ ∞
= =
≡
Δ = Δ = − +∑ ∑ . (1)
Damit sind die partiellen Ableitungen behandelt und man kommt insgesamt zu gekoppelten ge-wöhnlichen Differentialgleichungen.
Eine weitere Möglichkeit zur Behandlung partieller Differentialgleichungen besteht in der Bil-dung Finiter Differenzen. Zum Beispiel
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
22
1 1 1 1 22
, , , , 4 ,, ,
oder in einem diskretisierten Raum4
.iji j i j i j i jij
x h y x h y x y h x y h x yx y O h
h
O hh
ψ ψ ψ ψ ψψ
ψ ψ ψ ψ ψψ + − + −
+ + − + + + − −Δ = +
+ + + −Δ = +
.
(2)
2 Wissenschaftliches Rechnen - Praktikum
Auch so kommt man zu gekoppelten, gewöhnlichen Differentialgleichungen für die Feldfrei-heitsgrade ψij.
Beide Verfahren sind hervorragend geeignet für Probleme mit einfachen Geometrien und einfa-chen Randbedingungen. Sind diese kompliziert, wächst der analytische und programmtechnische Aufwand schnell an und die Lösungsmethoden werden unzweckmäßig.
Dann eignet sich die Methode der Finiten Elemente. Mit Hilfe so genannter Testfunktionen schreibt man die partiellen Differentialgleichungen um in eine Integralgleichung und berechnet das Integrale näherungsweise auf vielen kleinen Teilgebieten. Insgesamt kommt man wieder zu einem System gekoppelter gewöhnlicher Differentialgleichungen für diskrete Feldfreiheitsgrade.
Einige wichtige Vorteile des Verfahrens der Finiten Elemente sind:
Die Geometrie des Integrationsgebietes ist so gut wie frei wählbar
Die Geometrie kann verändert werden, ohne dass andere Teile des Formalismus berührt werden
Dirichletsche und von Neumannsche Randbedingungen können leicht auch auf schiefen Rändern in Kombination formuliert werden
Partielle Ableitungen der Felder können in vielen wichtigen Fällen durch partielle Integration auf Testfunktionen umgeschrieben und so analytische ausgeführt werden
Im Übrigen gibt es viele Methoden der Finiten Elemente und viel verschiedene Formulierungen. Wir werden uns im Folgenden auf eine spezielle Form beschränken, die auch in modernen, kommerziellen Computerprogrammen wie FemLab verwendet wird.
7.2. Formulierung partieller Differentialgleichungen mit Finiten Elementen
7.2.1 Allgemeine Form einer partiellen Differential-Gleichung Wir betrachten zunächst eine einfache, partielle Differentialgleichung. Die Verallgemeinerung auf gekoppelte Gleichungen ist später ohne weiteres möglich. Die Form der Gleichung ist generali-siert und alle oben in der Motivation aufgeführten physikalischen Beispiele können in diese Form gebracht werden.
Wir bezeichnen unser Feld mit u und das Integrationsgebiet mit G. Dann können die generalisier-te partielle Differentialgleichung und ihre Randbedingungen in folgender Form angegeben wer-den:
( )( )
( ) ( )Einheitsvektor Lagrange-senkrecht auf Miltiplikator
in Inhomogene Kontinuitäts-Gleichung0 auf Dirichlet Randbed.
ˆ auf von Neumann Randbed. .
t
u
D FR
n G R μ∂Ω
⎧⎪∂ +∇ ⋅Γ = Ω⎪⎪ = ∂Ω⎨⎪ − ⋅ Γ = + ∂ ∂Ω⎪⎪⎩
(3)
Die Funktionen D,Γ,F und G sind allgemeinen Funktionen und hängen eventuell auch linear oder nichtlinear vom Feld u ab. Sie können in folgender Weise interpretiert werden:

Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 3
www.kbraeuer.de 16. Februar 2009
Erhaltener Strom
Diffusion Konvektion AbsorptionQuelle Quelle
Masse Rand- Rand-Quelle Absorption
, ,
, .
c u u F f au
D d u G g qu
α γΓ = ∇ + − = −
= = −
(4)
Dirichlet Randbedingungen könnten unter anderem sein:
0 : keine Dircheltsche Bedingung: 0 auf
: auf .
RR u u GR f u u f G
== = ∂= − = ∂
(5)
Dirichletsche Randbedingungen beeinflussen immer auch den erhaltenen Strom Γ auf dem Rand ∂G. Ist zum Beispiel die Geschwindigkeit einer Flüssigkeit am Rand v=0, also R=v=0, dann wirkt vom Rand eine Kraft auf die Flüssigkeit uF Rμ μ= ∂ = , welche die Druck- und Reibungskräfte gerade kompensiert. Die Stärke der Kraft bzw. des Lagrange-Parameters μ muss so bestimmt werden, dass sich das Kräftegleichgewicht bei der richtigen Geschwindigkeit v=0 einstellt.
In (3) sehen wir den entsprechenden Term in der von Neumann'schen Randbedingung. Die Di-richletsche Randbedingung R wird nach dem Feld u abgeleitet und mit einem Lagrange-Mulitplikator μ so verstärkt, dass beide Randbedingungen kompatibel sind. Wie dieser Multiplika-tor μ berechnet wird, sehen wir später.
7.2.2 Integrale Form Um zu Finiten Elementen zu kommen, wird die partielle Differentialgleichung in eine integrale Form gebracht. Dies geschieht mit Hilfe von Testfunktionen v . An diese Testfunktionen werden von vornherein keine speziellen Bedingungen gestellt, sie sollten lediglich stetig und differenzier-bar sein. Aus dem weiteren Verlauf der Betrachtungen ergibt sich dann eine ganz natürliche Wahl dieser Funktionen.
Die Integrale Form der partiellen Differentialgleichung ist
( ) ( ): Testfunktiontv D dA vFdA vΩ Ω
∂ +∇⋅Γ =∫ ∫ . (6)
Da diese Gleichung für jede beliebige Testfunktion v gelten soll, ist sie äquivalent zur ursprüng-lichen Gleichung:
( ) 0 0.t tv D F dA v D FΩ
∂ +∇ ⋅Γ − = ∀ ⇒ ∂ +∇⋅Γ − =∫ (7)
In der integralen Form (6) können nun noch die von Neumannschen Randbedinungen verwertet werden. Dazu wird die Stromdivergenz partiell integriert:
( ) ( )
( )Part. Integr.
ˆ
uG Rv v
v dA v n ds v dAμ
= =Ω ∂Ω Ω− + ∂∇⋅ Γ −Γ⋅∇
∇ ⋅Γ = Γ ⋅ − ∇ ⋅Γ∫ ∫ ∫ . (8)
Insgesamt liegt die Gleichung mit ihren Randbedingungen dann vor als
( )( ) ( )0 ,
0 auf .
t uv D v vF dA v G R ds v
R
μΩ ∂Ω
⎧ = − ∂ + ∇ ⋅Γ + + + ∂ ∀⎪⎨⎪ = ∂Ω⎩
∫ ∫ (9)

4 Wissenschaftliches Rechnen - Praktikum
Alle Randbedingungen sind berücksichtigt und die Ableitung des erhaltenen Stromes wurde auf die Testfunktion übertragen. Dies erweist sich oft als enormer numerischer Vorteil.
7.2.3 Netz (mesh) Um endlich zu Finiten Elementen zu kommen, wird das Integrationsgebiet G partitioniert:
( )( )
( ) ( ) ( )
1
, 0Elemente
ElementeN
i i j N
i
G G G G i j=
= ∩ = ∀ ≠ ∈∪ . (10)
Ein typisches Beispiel in 2 Dimensionen ist:
( ) ( ) ( ) ( ){ }( ) ( ) ( ) ( )( ) ( ) ( )( ) { } [ ]
1 2 3
1 2 1 3 1
ist konvexe Hülle von , , ,
: , , 0,1 , 1.
i i i i
i i i i i i
G x x x
x G x x s x x t x x s t s t∈ = + − + − ∈ + ≤
(11)
Das gesamte Integrationsgebiet G wird in N Dreiecke zerlegt, wie es auch in Abbildung 1 Mitte angedeutet ist.
Abbildung 1: Schematische Darstellung des Vorgehens vom Umschreiben der partiellen Differentialgleichung in eine Integralglei-chung auf dem Gebiet G (Links), der Partitionierung des Gebiets G (Mitte) und der Entwicklung des Felds u mit diskreten Freiheitsgrade U (Rechts):
7.2.4 Finite Elemente Der kontinuierliche Raum ist eine geniale Erfindung der griechischen Philosophen für mathema-tische Beweise und analytische Berechnungen. Ein solcher Raum existiert nirgends in der Natur und er eignet sich auch nicht für numerische Berechnungen. Wir gehen daher über zu diskreten Freiheitsgraden (DOF, 'degrees of freedom'). Mit Bezug auf (11) wählen wir
( ) ( ) ( ) ( )( )für jedes Gebiet die Freiheitsgrade DOF .i i ik kG U u x= (12)
Ferner wählen wir
( )
( )( ) ( )( )( ) ( )( )
( ) ( ) ( )
( ) ( )
für jedes Gebiet die Basisfunktionen
1 stetig differenzierbar : und
0 sonst.0 für
i
i i i ik k ki
k ii ikk l
G
x x x G
xx l k
ϕ ϕϕ
ϕϕ
⎧ = ⎧ ∀ ∈⎪ ⎪⎨ ⎨
== ≠ ⎪⎪ ⎩⎩
(13)
Oft nimmt man einfache Polynome als Basisfunktionen, zum Beispiel lineare:

Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 5
www.kbraeuer.de 16. Februar 2009
( ) ( ) ( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
1 1 1
2 2 2
3 2 3
, mit 1
i i i
i i i i i i i i ik k k k kl
i i i
a b cxx a x b y c A y A a b c
a b c
ϕ
⎛ ⎞⎛ ⎞ ⎜ ⎟⎜ ⎟= + + = = ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(14)
Um die drei Parameter a,b,c festzulegen, genügen dann genau die Funktionswerte jeder Funktion an den Ecken des jeweiligen Dreiecks. In zwei Dimensionen geht das so:
( ) ( ) ( )
( ) ( )( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( )
( )
( ) ( )( )1 1 1 1 2 3
1
' ' 2 2 2 1 2 3
3 2 3
,1
1 0 0: 0 1 0 .
1 1 1 0 0 1
i i
i i
i i i i i i
i i i i i i i i i ik k kk
i i i
A X
xx A y
a b c x x x
x a b c y y y A X
a b c
ϕ
ϕ δ−
≡
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟= = ⇒ =⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠⎝ ⎠
(15)
Mit (13) ist ein besonders eleganter Zusammenhang zwischen dem Feld u und den Freiheitsgra-den U gegeben:
( ) ( ) ( ) ( ),
.i ik k
i ku x U x x Gϕ= ∀ ∈∑ (16)
Diese Entwicklung muss im nächsten Schritt in die Integralgleichung (9) eingebracht werden.
7.2.5 Diskretisierung der Integralgleichung Als Testfunktionen v verwenden wir der Einfachheit halber die Basisfunktionen ( )i
kϕ nach (13). Diese und die Entwicklung (16) sind nun in die Integralgleichung (9) einzusetzen. Dies ist etwas unübersichtlich und wird später für ein spezielles Problem (die Trommel) explizit durchgeführt. Strukturell ergib sich folgendes:
( ) ( ) ( )( )( )( ) ( ) ( )
( ) ( ) ( )
1 11 2
Längen-mass residual constraint elemematrix vector matrix
Mit , ,..., ,...
0 ,folgen aus
0 auf .
, , ,
die Gleichungen
ik
it u k
t
t
U U U U
vd u v vF dA v G R ds v
R
d U t U L U r N U tμ
μ ϕΩ ∂Ω
⋅
=
⎧ = − ∂ + ∇ ⋅Γ + + + ∂ ∀ =⎪⎨⎪ = ∂Ω⎩
∂ = − Λ
∫ ∫
∼
( )nte (s.u.)
constraintresidual
0 ,M U t
⎧⎪⎪⎪⎨
=⎪⎪⎪⎩
(17)
ˆwegenist dabei die 'constraint matrix' .
u
u
n G RN M
μ− ⋅Γ = + ∂= −∂
(18)

6 Wissenschaftliches Rechnen - Praktikum
Die Integration über den Rand ∂G des Integrationsgebietes wir als Riemann-Summe ausgeführt, so dass sich der Vektor Λ aus Produkten der Lagrange-Multiplikatoren μ und der Länge der Li-nienelemente zusammensetzt:
( ) ( ) ( ) ( ) ( ) ( ), .i n i i i ik k k l k lx x x x GμΛ = − ∀ ∈∂
(19)
7.3 Berechnung stationärer Lösungen, Eigenvektoren und Zeitentwicklungen
7.3.1 Lineare oder linearisierte stationäre Probleme: Ohne Beschränkung der Allgemeinheit setzen wir unsere Betrachtungen nun für lineare Proble-me fort. Nichtlineare Differentialgleichungen können linearisiert und mit Methoden wie dem Newton-Verfahren iterativ behandelt werden.
Durch Linearisierung erhalten wir aus (17) das (stationäre) Gleichungssystem:
( )( ) ( ) ( ) ( )
( )( ) ( )
0 0 0 0
stiffness load vectormatrix
0 0 0
0
, mit Jacobi-Matrix von
und mit - :
0
t
U
t
K U U U N U L U K L L
N U U U M U
V U U
K N V LN M
⎧ − + Λ = ≡ −∂⎪⎪⎨⎪
− =⎪⎩=
⎛ ⎞ ⎛ ⎞⎛ ⎞=⎜ ⎟ ⎜ ⎟⎜ ⎟
Λ⎝ ⎠⎝ ⎠ ⎝ ⎠
(20)
Wir erkennen ein lineares Gleichungssystem, das nun mit Standardmethoden (Standard-programmen) gelöst werden kann. Sehr uninteressant sind die Lagrange-Mulitplikatoren μ bzw. Λ, die vor Lösen des Systems mit Standardmethoden eliminiert werden.
7.3.2. Eigenwertprobleme Im Zusammenhang mit partiellen Differentialgleichungen ist das Eigenwertproblem in zweierlei Hinsicht interessant. Die Eigenwerte geben Aufschluss über Stabilität oder Frequenzverhalten möglicher Lösungen und in der Eigenvektorbasis können auch Zeitentwicklungen sehr effizient berechnet werden (alle Eigenvektoren erfüllen die Randbedinungen!).
Das Eigenwertproblem
00 00
t dK N V VN
λ⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞
=⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟Λ Λ⎝ ⎠⎝ ⎠⎝ ⎠ ⎝ ⎠
(21)
kann mit Standardroutinen gelöst werden. Für das zeitabhängige Problem
00 0 0
t
t
d K NV V LN M
⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞⎛ ⎞∂ = − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ Λ Λ⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠ ⎝ ⎠
(22)
ergibt sich die Zeitentwicklung einzelner Lösungen aus
Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 7
www.kbraeuer.de 16. Februar 2009
( )( )
( )( )
( ) ( ) ( )( )
( )
( ) ( ) ( ) ( ) ( )
1 1
0
0
/ .
m
m
m mtM Mm m
tm m
mm m m
t
a
m m mt
K NV V Lc cN M
L Vc cM
c t c e aλ
λ
λ
= =
≡
⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞∂ = − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟
Λ Λ⎝ ⎠⎝ ⎠ ⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞∂ = − + ⋅⎜ ⎟ ⎜ ⎟
Λ⎝ ⎠ ⎝ ⎠
= − +
∑ ∑
(23)
Die Eigenvektoren sind unter der Zeitentwicklung
( )
( )
( )
( )
stabil für 0,
stationär für 0,
labil für 0,
oszillatorisch für .
m
m
m
m
λ
λ
λ
λ
<
=
>
∈
(24)
Durch Superposition der Eigenvektoren können auch komplexere Zeitentwicklungen analysiert und berechnet werden.
7.3.3 Zeitentwicklungen nichtlinearer Probleme Bei nichtlinearen Problemen koppeln die einzelnen Moden (Eigenvektoren) miteinander und das vorgestellte Verfahren ist nicht immer Praktikable. Dann integriert man die Gleichung (17) direkt mit Verfahren wie dem von Euler oder Runge-Kutta.
7.4 Kann man die Form einer Trommel hören?
Diese Frage wurde zum erstenmal 1966 von M.Kac gestellt (Ref. Bulletin of …)
Als konkrete, relativ einfache Anwendung der FE-Methode wollen wir nun dieser Frage nachge-hen.
Das Schwingungsverhalten einer Membran (oder Trommel) wird im einfachsten Fall durch die Schwingungsgleichung
( ) ( )2 , , , ,t u x y t u x y t∂ = Δ (25)
beschrieben. u ist dabei die so genannte Verschiebung der Membrane in z-Richtung (siehe z.B. Landau-Lifschitz VII: Elastizitätstheorie).
Abbildung 2: Verschiebungsfeld u(x,y,t) einer Membran. u gibt in unserem Fall die Verschiebung der Membran in z-Richtung für jeden Punkt (x,y) zu jeder Zeit t an.
Entsprechend (23) steht das Frequenzspektrum dieses Systems in engem Zusammenhang mit den Eigenwerten λ(i) des Laplace-Operators

8 Wissenschaftliches Rechnen - Praktikum
( ) ( ) ( ) ( ) ( ), , , ,i i iu x y t u x y tλΔ = . (26)
Um den Zusammenhang der Eigenwerte λ(i) mit den Frequenzen ω(i) der Eigenmoden u(i) zu fin-den, lösen wir die Bewegungsgleichung:
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )
( ) ( ) ( )
2
2
,
2
Bewegungsgleichung: , , , ,
Lösungsansatz: , , ,
Einsetzen: , ,
Orthonormalitätder Eigenfunktionen:
Lösungen für Moden: cos sin ,
i
t
ii
i i it i i
u x y
it i i
i i i i i
u x y t u x y t
u x y t c t u x y
c t u x y c t u x y
c t c t
c t a t b t
λ
λ
ω ω ω
Δ
∂ = Δ
=
∂ =
∂ =
= +
∑
∑ ∑
( )
( ) ( ) ( ) ( )( ) ( ) ( )( )
, , cos sin ,Gesammtlösung:
und aus Anfangswerten des Verschiebungsfeldes
ii
i ii i i i
i i
u x y t a t b t u x y
a b
λ
ω ω
= − ∈
= +∑
.
(27)
Das Schwingungsspektrum ergibt sich also aus
( )iiω λ= − . (28)
Die Masse d und der erhaltene Strom Γ der Differentialgleichung (3) ergeben sich aus der Schreibweise
1 0x x
d y y F
uu
uλ
Γ
∂⎛ ⎞⎛ ⎞− =⎜ ⎟⎜ ⎟∂⎝ ⎠⎝ ⎠
. (29)
Am Rand kann die Membran entweder
ˆfrei schwingen: 0, 0 oder
ˆfestgehalten werden: 0 .G
G
R n
R u n μ
= → − ⋅Γ =
= → − ⋅Γ = +
(30)
Für die frei schwingende Membran reduziert sich die Integralgleichung (9) (inklusive der Rand-bedingungen) auf
( )( )
( )( ) ( )( )( )
0, , bzw.
0.x x y y
v u v dA v
v u v u v u dA
λ
λΩ
Ω
− + ∇ ⋅Γ = ∀
− + ∂ ∂ + ∂ ∂ =
∫
∫
(31)
Entwickelt in die Basis (14) ist dann

Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 9
www.kbraeuer.de 16. Februar 2009
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( )( )
( )( )( )
( )( )( )
( )( )( )
1 1 2 2
0x yx y
i i i ik l k l
i i i i i i i i ik l l x k x l l y k y l ll l lv u u uv v
i i i i i ik l x k x l y k y ll
A A A A
U U U dAϕ λ ϕ ϕ ϕ ϕ ϕ
ϕ λϕ ϕ ϕ ϕ ϕ
Ω∂ ∂∂ ∂
= = = =
⎧ ⎫⎛ ⎞⎛ ⎞⎪ ⎪⎜ ⎟⎜ ⎟= − + ∂ ∂ + ∂ ∂⎨ ⎬⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎪ ⎪⎝ ⎠ ⎝ ⎠⎩ ⎭
⎧⎪
= − + ∂ ∂ + ∂ ∂⎨
∑ ∑ ∑∫
∑
( ) ( )
( )
i ikl kl
il
D K
dAU
λ
Ω
= −
⎫⎪⎬
⎪ ⎪⎩ ⎭
∫
(32)
Wir entwickeln nun die Integranden wieder in die Basis (14) und finden für die Massenmatrix D und die Steifheitsmatrix K die relativ einfachen Ausdrücke
( ) ( ) ( )
( )
( ) ( )( )
( )
( )
( ) ( )( ) ( ) ( )( ) ( )
( )
( )
( )
'
' '
' ' ' '' '
1 '3 2
siehe Anhang
13 2
ili i
kl ll i
i i i i i i i i i i ikl k l k l l k l l l ll lx
g l
i
kl
D dA dA x x dA
g
δ δ
ϕ ϕ ϕ ϕ ϕ ϕ ϕ ϕ
δ
ΩΩ Ω= =
= ∀
= − = − = −
= −
∑ ∑∫ ∫ ∫
(33)
und
( ) ( ) ( ) ( ) ( ){ }( )
( ) ( ) ( ) ( ){ }( )
( )
( )
( ) ( ) ( ) ( ){ }( )
1 1 2 2 1 1 2 2
2siehe Anhang
1 1 2 2 2
i i
i
i i i i i i i i ikl k l k l k l k l
g
ii i i i
k l k l
K A A A A dA A A A A dA
gA A A A
Ω Ω
=
= − + = − +
= − +
∫ ∫
(34)
Für die Integrationen wurden die Ergebnisse aus dem Anhang verwendet.
Zu lösen ist nun im Prinzip das lineare Problem:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
1 1 1
1 1 1
1 1
1 1 1 1 1 1 1 1 1 1 1 111 11 12 12 11 21 12 22 11 31 12 322 2 2
1 1 1 1 1 1 1 1 1 1 1 1 021 11 22 12 21 21 22 22 21 31 22 322 2 2
1 1 1 1 131 11 32 12 312 2
g g gA A A A A A A A A A A A
g g gA A A A A A A A A A A A
g gA A A A A A
⎛ ⎞ ⎛ ⎞ ⎛ ⎞− + − + − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞ ⎛ ⎞− + − + − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
⎛ ⎞−+ −⎜ ⎟
⎝ ⎠
…
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )
( )
( )
( )
( )
( )
1
2
1
1
1
11
12
11 1 1 1 1 1 1 321 32 22 31 31 32 322
22 2 2 120 1211 11 122
0 02 3
0 0 02 3
0 02
gA A A A A A
g A A A A
K
g
g
g
U
U
U
U
λ
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞ ⎛ ⎞⎜ ⎟+ − +⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎜ ⎟⎜ ⎟⎛ ⎞
− +⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟
⎜ ⎟⎜ ⎟⎝ ⎠
⋅
⋅
⋅
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
=
…
…
( )
( )
( )
( )
( )2
11
12
13
32
102 3g
D
U
U
U
U
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟
⋅⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
…
(35)

10 Wissenschaftliches Rechnen - Praktikum
Diese Gleichung muss allerdings noch reduziert werden, da jeder Freiheitsgrad nU ja zwei bis
dreimal als Eckpunkt ( )ilU verschiedener Elemente G(i) in Erscheinung tritt. Diese Reduktion
geschieht mit einer Transformationsmatrix T:
( )
( )
( )
( )
( )
( )
111
21
32
1
3
1
2
ElementeeStütz N
U
U
U
U
N U
UU
T
U ⎛ ⎞⎜ ⎟⎝ ⎠
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
⎛ ⎞⎜ ⎟⎜ ⎟ =⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
(36)
Wie folgt, erhält man T direkt aus der Beschreibung der Finiten Elemente.
Die Finiten Elemente werden beschrieben durch die einzelnen
( ){ }Stützpunkten , 1... Stütznx n N∈ (37)
und der
( ) ( )( ){ }
{ }( ){ } ( ) ( )
Zuordnungsmatix : , , mit
Elementindex 1..
Eckindex 1..3
Stützpunktindex 1.. , max .
Elemente
Stütz Stütz
tri i k tri i k n
i N
k
n N N tri
→ =
∈
∈
∈ =
(38)
Die gesuchte Transformationsmatrix hat dann die Elemente
( ) ( ),3 1 , ,n i k n tri i kT δ− + = (39)
Beispiel:
Abbildung 3: 'tri'-Matrix und Koordinaten für ein Rechteck mit vier Finiten Elementen Die Transformationsmatrix für die in Abbildung 3 gezeigten Finiten Elemente ist
0 0 1 0 0 0 0 0 1 0 0 00 0 0 0 0 0 1 0 0 1 0 00 0 0 0 1 0 0 0 0 0 1 00 1 0 0 0 1 0 0 0 0 0 01 0 0 1 0 0 0 1 0 0 0 1
T
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
=
(40)

Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 11
www.kbraeuer.de 16. Februar 2009
Insgesamt wird das Eigenwertproblem zu
, mit und .t tKU DU K TKT D TDTλ= = = (41)
7.5 Aufgaben
7.5.1 Finite Elemente einlesen und darstellen Zur Vereinfachung verwenden wir zunächst Finite Elemente aus der Dose (von Daten-Files). Wenn noch Zeit bleibt, können wir später selber einen Elemente-Generator entwickeln. Der File-Name beschreibt die Geometrie und die Anzahl der Elemente N(Elemente), also
'Kreis10.asc' steht für ein kreisförmigs Gebiet aus 10 Finiten Elementen, und'Violine1000.asc' steht für ein violinenförmiges Gebiet aus 1000 Finiten Elementen.
Die Gebiete mit wenigen Elementen sind für Testzwecke gedacht.
Die Files enthalten zwei den Gleichungen (37) und (38) entsprechenden Matrizen
( ) ( )( )( ) ( )( )
2
2
, , und
, .
Elemente
Stütz
N
Nn n
tri n i k
X x y
= ⊗ →
= ⊗ →
Die Zahl der Stützstellen ist ( ) ( )StützN max tri= .
Lesen Sie diese Daten ein und stellen Sie die Geometrie und die Finiten Elemente grafisch dar.
7.5.2 Berechnung der Steiffheitsmatrix K und Lösung des Eigenwertproblemes Schreiben Sie nun Routinen zur Berechnung der
• Basisfunktionen φ in Form der Matrizen ( )iklA entsprechend (15),
• Steiffheitsmatrix K entsprechend (34) und der • Transformationsmatrix T entsprechend (39).
Wenn möglich, verwenden sie für K und T 'sparse'-Matrizen.
Lösen Sie damit das Eigenwertproblem (41) für die verschiedene Geometrien und stellen Sie die Eigenfunktionen als ( ) ( ) ( )k k
n nu x U= graphisch dar (eventuell als Dreiecke
( )( )
( )( )
( )( ){ },1 ,2 ,3, ,k k k
tri i tri i tri iU U U ).
Für die Lösung des Eigenwertproblems eignet sich zum Beispiel die Kombination der 'numerical recipes' Routinen
(TRED2) ->
Householder-Reduktion einer reellen, symme-tischen Matrix,
(TQLI) Tridiagonal QL Implict -> Eigenwerte und Eigenvektoren einer reellen, symmetrischen Tridiagonalmatrix.
Interessant sind immer nur wenige Eigenwerte in der Nähe von 0, so dass 'Inverse Iterationsme-thoden' besser geeignet wären. Falls Ihnen entsprechende Routinen zur Verfügung stehen, zum Beispiel auch aus einem vorausgegangenen Projekt, verwenden Sie diese.
Zum Testen wählen Sie 'Rechteckxxx.asc'. Die analytischen Lösungen dieser Geometrie sind
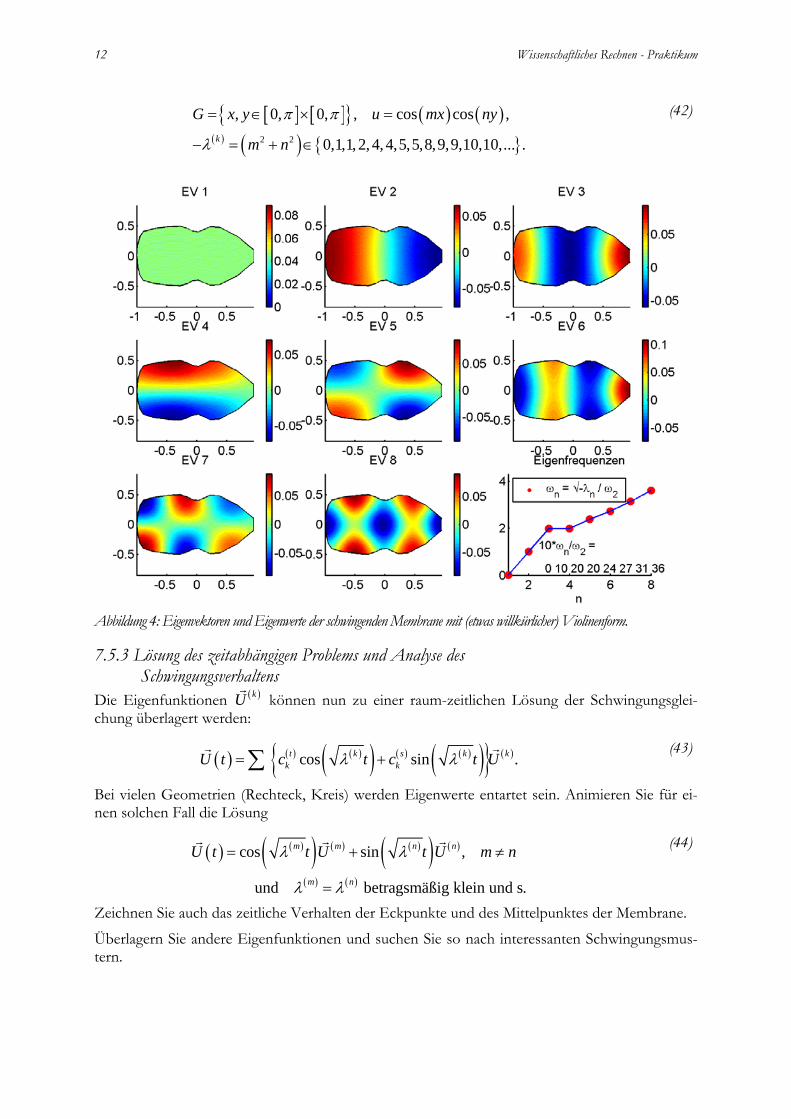
12 Wissenschaftliches Rechnen - Praktikum
[ ] [ ]{ } ( ) ( )( ) ( ) { }2 2
, 0, 0, , cos cos ,
0,1,1, 2, 4, 4,5,5,8,9,9,10,10,... .k
G x y u mx ny
m n
π π
λ
= ∈ × =
− = + ∈
(42)
Abbildung 4: Eigenvektoren und Eigenwerte der schwingenden Membrane mit (etwas willkürlicher) Violinenform.
7.5.3 Lösung des zeitabhängigen Problems und Analyse des Schwingungsverhaltens Die Eigenfunktionen ( )kU können nun zu einer raum-zeitlichen Lösung der Schwingungsglei-chung überlagert werden:
( ) ( ) ( )( ) ( ) ( )( ){ } ( )cos sin .t k s k kk kU t c t c t Uλ λ= +∑
(43)
Bei vielen Geometrien (Rechteck, Kreis) werden Eigenwerte entartet sein. Animieren Sie für ei-nen solchen Fall die Lösung
( ) ( )( ) ( ) ( )( ) ( )
( ) ( )
cos sin ,
und betragsmäßig klein und s.
m m n n
m n
U t t U t U m nλ λ
λ λ
= + ≠
=
(44)
Zeichnen Sie auch das zeitliche Verhalten der Eckpunkte und des Mittelpunktes der Membrane.
Überlagern Sie andere Eigenfunktionen und suchen Sie so nach interessanten Schwingungsmus-tern.

Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 13
www.kbraeuer.de 16. Februar 2009
Wenn es technisch möglich ist, können Sie die Zeitfunktionen auf den Systemlautsprecher über-tragen und so hören, wie sich die Form einer Trommel und die Art ihrer Anregung auf das Klangerlebnis auswirken.
Mathematisch wurde inzwischen bewiesen, dass es keinen eindeutigen Zusammenhang gibt zwi-schen der Membran- oder Trommelform und dem Eigenwertspektrum λ (Ref. Bulletin of …). Man kann hochsymmetrische Formen verschieden zusammensetzen und so identische Spektren erhalten.
Mit den gleichen Methoden untersucht man auch das Schwingungsverhalten von Gebäuden.
7.5.4 Generator für Finite Elemente Finite Elemente für sehr allgemeine Gebiete G zu generieren, ist eine Kunst für sich. Für einfach zusammenhängende, konvexe Geometrien können wir jedoch einen relativ einfachen Generator entwickeln.
Die Geometrie wird als Polygonzug durch die Randpunktmatrix vorgegeben:
( )( )( )1 2, , .Rand
Rand
NX x x x= … (45)
Eine grobe Partitionierung erhält man, indem man alle Randpunkte xi mit dem Mittelpunkt xs des Gebietes verbindet:
( ) ( )( )
( )
( )
( ) ( ) ( )
( ) ( )
1mit , :
1 2 1
2 3 1.
1 1
1 1
Stütz RandnRand
Rand
Rand
Rand Rand Rand
Rand Rand
X X xN
N
Ntri
N N N
N N
⎛ ⎞= ⎜ ⎟⎝ ⎠
⎛ ⎞+⎜ ⎟
+⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟− +⎜ ⎟⎜ ⎟+⎝ ⎠
∑
(46)
Iterativ kann dann die Anzahl der Elemente jeweils verdreifacht werden, indem man die Mittel-punkte der Dreiecke als neue Gitterpunkte einführt und diese mit den Ecken des jeweiligen Drei-ecks verbindet:
( ) ( ) ( ) ( )( ) ( )( )
1,1..3
1, , , , mit 3
ElementStütz Stütz iNtri i kk
X X x x x x=
→ = ∑… . (47)
Mit j=3(i-1) legen wir dann fest:
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )
1, ,1 , , 2 , ,
2, , 2 , ,3 , ,
3, ,3 , ,1 , .
Stütz
Stütz
Stütz
tra j k tri i tri i N i
tra j k tri i tri i N i
tra j k tri i tri i N i
+ = +
+ = +
+ = +
(48)
Nach jeder Iteration setzt man dann tri tra= und aktualisiert die Varibale N(Stütz).
7.6 Literatur
Braess D 'Finite Elemente: Theorie, schnelle Löser und Anwendungen in der Elastizitäts-

14 Wissenschaftliches Rechnen - Praktikum
theorie' Berlin-Heidelberg Springer 1997
Bräuer K 'Computersimulation physikalischer Phänomene mit Finiten Elementen', Theorie und Übungen zur Finiten Elemente Methode, (http://www.kbraeuer.de/Vorles/VorlesSS2004_Fem.htm)
Landau LD, Lifschitz EM 'Lehrbuch der Theoretischen Physik, VII Elastizitätstheorie' Akademie-Verlag Berlin 1989
FemLab Reference Manual (http://access.femlab.com/) (Kommt mit FemLab Testver-sion)
Bulletin of the American Mathematical Society, Vol. 27, No.1, July 1992 (Can we hear the shape of a drum?)
Marsal D 'Finite Differenzen und Elemente : numerische Lösung von Variationsproble-men und partiellen Differentialgleichungen' Berlin-Heidelberg Springer 1989
Steinbuch R 'Finite Elemente - ein Einstieg' Berlin-Heidelberg-Springer 1998
Stiefel E 'Einführung in die numerische Mathematik' Teubner Studienbücher Mathematik 1976
Anhang Integrationen
Definition des Flächenelements ( ) ( ) ( ) ( )( ) ( ) ( )( ) { } [ ]1 2 1 3 1: , , 0,1 , 1i i i i i ix G x x s x x t x x s t s t∈ = + − + − ∈ + ≤ (49)
Invariantes Flächenelement
( ) ( )( ) ( ) ( )( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( )
( )
( )
2 1 3 1
2 1 3 1 3 1 2 1
ˆ
ˆ
also:
i
z
i i i i
i i i i i i i iz
g
i
x xdA dxdye dsdts t
x x x x dsdt
x x y y x x y y e dsdt
dA dA g dsdt
≡
∂ ∂= = ×
∂ ∂
= − × −
= − − − − −
≡ =
(50)
Fläche eines Netzes
( )
( )
( ) ( )( )1 1 121
2 00 0
1
2i
t ic i
i
G
t
gI dA g ds dt t t−
= −
⎛ ⎞≡ = = − =⎜ ⎟
⎝ ⎠∫ ∫ ∫
(51)

Kurt Bräuer: 7. Strukturmechanische Schwingungen mit der Finiten Elemente Methode 15
www.kbraeuer.de 16. Februar 2009
Integral über Koordinaten
( )
( ) ( ) ( ) ( )( ) ( ) ( )( )( )( ) ( ) ( ) ( ) ( )( )
( )
( ) ( ) ( )( )
( ) ( ) ( )
( )
212
121 12 20
1 1
1 2 1 3 10 0
1 1 1 1 1 1
1 2 1 3 10 0 0 0 0 0
1 11
1
10
1
i
ti i i i i i
G
t t ti i i i i i i i
t tt
i i
t t
xdA g x s x x t x x ds dt
g x ds dt g x x sds dt g x x t ds dt
g x t dt g
−
− − −
= − = −= −
− =
⎛ ⎞= + − + −⎜ ⎟
⎝ ⎠
⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + − + −⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
= − +
∫ ∫ ∫
∫ ∫ ∫ ∫ ∫ ∫
∫ ( ) ( ) ( )( ) ( )
( )
( ) ( ) ( )( ) ( )
( )( )
( ) ( ) ( )( ) ( ) ( )( )( )( ) ( ) ( ) ( ) ( )
( )
1 13 2 2 31 1 1 1 1 12 3 6 2 3 60 0
1 121
2 1 3 120 0
1 2 31 2 1 3 1
1 1
36 2 3 2
i i i i i i
t t t t t
i i ii i ii i i i i i
x x t dt g x x t t dt
x x xg g gx x x x x x
− + = − =
− − + − −
+ += + − + − = =
∫ ∫
(52)
Integral über Basisfunktion ( ) ( ) ( ) ( ) ( ) ( ) ( )( )
( )
( ) ( ) ( ) ( ) ( )( )( )
( )( ) ( ) ( ) ( ) ( )( )
( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )
( )( ) ( ) ( )( )
( )
( )
( )
( )
( )
( )
1 2 3
1 2 3 1 2 3
1 1 2 3 2 1 2 3 3
1 2 3
1 2 3 1 2 3
2
1 1 1 12 3
12 3
1 1 1
i
i
i i i i i ik k k k
G G
ii i i i i i i i i i
k k k k k k
G
ii i i i i i i i i
k k k
i i i
ii i i i i i
k k k
x dA A x A y A dA
gA x A y A dA A x A y A
g A x x x A y y y A
x x xg A A A y y y
ϕ = + +
= + + = + +
= + + + + + + + +
⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟
= + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜⎜ ⎟ ⎜ ⎟ ⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠
∫ ∫
∫
( )1 2 3 1
13 2
k k k
ig k
δ δ δ+ + =
⎧ ⎫⎪ ⎪⎪ ⎪⎨ ⎬
⎟⎪ ⎪⎟⎪ ⎪⎩ ⎭
= ∀
![Heavy Quark Physics and CP Violation (II) · 3. Existence of multiplets (states with same energies) Some consequences of symmetries 0[,] bab a ba b a H G HG GH gg H ψ ψψ ψ ψψ](https://static.fdocument.org/doc/165x107/6122e024fa8ad8651115522e/heavy-quark-physics-and-cp-violation-ii-3-existence-of-multiplets-states-with.jpg)






![iωt ω arXiv:1606.07308v3 [math.AP] 29 Dec 2017 · 2018. 1. 1. · model [Iva38, Sol70]: (1.1) i∂tψ= Dmψ−f(ψψ¯ )βψ, ψ(t,x) ∈ CN, x∈ Rn, n≥ 1, where Dm = −iα](https://static.fdocument.org/doc/165x107/605090f9c517a23c935a0b87/it-arxiv160607308v3-mathap-29-dec-2017-2018-1-1-model-iva38-sol70.jpg)








