5. Teorija stabilnosti po Ljapunovunasport.pmf.ni.ac.rs/materijali/2215/DS_B5 - 2018.pdf · 0 = 0...
21
5. Teorija stabilnosti po Ljapunovu (1) x 0 = f (x), f : D → R n , D ⊂ R n N δ (x 0 )= {x ∈ D : ||x - x 0 || <δ } Definicije osnovnih pojmova Definicija 1 [Stabilnost poloˇ zaja ravnoteˇ ze] Poloˇ zaj ravnoteˇ ze x 0 sistema DJ (1) je stabilan, ako za svako R> 0 postoji r = r(R) > 0, tako da za svaku faznu trajektoriju x = x(t) ovog sistema, iz ||x(t 0 ) - x 0 || <r sledi ||x(t) - x 0 || <R za svako t ∈ [t 0 , ∞). Neka je Φ t tok DS (1). Poloˇ zaj ravnoteˇ ze x 0 DS (1) je stabilan, ako za svako R> 0 postoji r = r(R) > 0, tako da za svako x ∈ N r (x 0 ) i za svako t ≥ 0 je Φ t (x) ∈ N R (x 0 ). Poloˇ zaj ravnoteˇ ze x 0 sistema DJ (1) je nestabilan ako nije stabilan. Slika 1: Stabilnost i asimptotska stabilnost PR x 0 =0 Definicija 2 [Asimptotska stabilnost poloˇ zaja ravnoteˇ ze] Poloˇ zaj ravnoteˇ ze x 0 sistema DJ (1) je asimptotski stabilan, ako je stabilan i postoji δ> 0, tako da iz ||x(t 0 ) - x 0 || <δ sledi lim t→∞ ||x(t) - x 0 || =0. Neka je Φ t tok DS (1). Poloˇ zaj ravnoteˇ ze x 0 DS (1) je asimptotski stabilan, ako je stabilan i postoji δ> 0, tako da za svako x ∈ N δ (x 0 ) sledi lim t→∞ Φ t (x)= x 0 . 1
Transcript of 5. Teorija stabilnosti po Ljapunovunasport.pmf.ni.ac.rs/materijali/2215/DS_B5 - 2018.pdf · 0 = 0...

5. Teorija stabilnosti po Ljapunovu
(1) x′ = f(x), f : D→ Rn, D ⊂ Rn
Nδ(x0) = x ∈ D : ||x− x0|| < δ
Definicije osnovnih pojmova
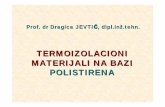
Definicija 1 [Stabilnost polozaja ravnoteze] Polozaj ravnoteze x0 sistemaDJ (1) je stabilan, ako za svako R > 0 postoji r = r(R) > 0, tako da za svakufaznu trajektoriju x = x(t) ovog sistema, iz ||x(t0)−x0|| < r sledi ||x(t)−x0|| < Rza svako t ∈ [t0,∞).
Neka je Φt tok DS (1). Polozaj ravnoteze x0 DS (1) je stabilan, ako za svakoR > 0 postoji r = r(R) > 0, tako da za svako x ∈ Nr(x0) i za svako t ≥ 0 jeΦt(x) ∈ NR(x0).
Polozaj ravnoteze x0 sistema DJ (1) je nestabilan ako nije stabilan.
Slika 1: Stabilnost i asimptotska stabilnost PR x0 = 0
Definicija 2 [Asimptotska stabilnost polozaja ravnoteze] Polozaj ravnotezex0 sistema DJ (1) je asimptotski stabilan, ako je stabilan i postoji δ > 0, tako daiz ||x(t0)− x0|| < δ sledi
limt→∞||x(t)− x0|| = 0.
Neka je Φt tok DS (1). Polozaj ravnoteze x0 DS (1) je asimptotski stabilan, akoje stabilan i postoji δ > 0, tako da za svako x ∈ Nδ(x0) sledi
limt→∞
Φt(x) = x0.
1
Ispitivanje stabilnosti i asimptotske stabilnosti po Ljapunovu PR x0 sistemaDJ (1), uvek se moze svesti na ispitivanje ovih osobina za x?0 = 0 odgovarajucegsistema DJ na koji se sistem (1) ekvivalentno transformise. Ovo se jednostavnopostize uvodenjem nove nepoznate funkcije y(t) = x(t) − x0, tako da je trans-formisani sistem DJ
(2) y′ = f(y + x0) = g(y).
Kako je g(0) = f(x0) = 0, y0 = 0 je PR sistema (2).
5.1. Teorija stabilnosti Ljapunova linearnih DS
Primenimo teoriju stabilnosti Ljapunova za ispitivanje stabilnosti trivijalnogresenja x = 0 (polozaja ravnoteze) homogenog linearnog sistema DJ sa konstant-nim koeficijentima,
(3) x′ = Ax,
gde je A konstantna realna kvadratna matrica reda n. Stabilnost trivijalnogresenja sustinski je odredena sopstvenim vrednostima
λk = αk ± iβk, k = 1, 2, . . . ,m, m ≤ n,
matrice A.
Lema 1 Ako sve sopstvene vrednosti matrice A imaju negativan realni deo, tadaza svako resenje x = ϕ(t) linearnog sistema DJ (3) postoje pozitivni brojevi α i q,tako da je ||ϕ(t)|| ≤ q e−αt za svako t ≥ 0.
Dokaz: Svako resenje sistema (3) moze predstaviti u obliku
ϕ(t) =m∑k=1
gk(t) eλkt,
gde su gk(t) vektorske funkcije – polinomi stepena odredenog visestrukoscu korenaλk karakteristicne jednacine det(A− λI) = 0.
Kako je Re (λk) = αk < 0, postoji broj α > 0 tako da je αk < −α za svakok = 1, 2, . . . ,m. Sada je
||ϕ(t)|| eαt ≤m∑k=1
||gk(t)|| · |e(αk+α±iβk)t| =m∑k=1
||gk(t)|| · e(αk+α)t.
2

Kako je αk + α < 0 za svako k = 1, 2, . . . ,m, funkcija na desnoj strani ovenejednakosti je neprekidna i tezi nuli kad t → ∞. Prema tome, ona je ograni-cena na [0,∞), pa na tom intervalu dostize maksimum q. Dokaz sada sledi iznejednakosti ||ϕ(t)|| eαt ≤ q, t ≥ 0.
Lema 2 Ako sve sopstvene vrednosti matrice A imaju negativan realni deo, tadaza svako resenje KP x = ϕ(t), ϕ(0) = ϕ0 linearnog sistema DJ (3) postoje pozi-tivni brojevi α i M , tako da je ||ϕ(t)|| ≤M ||ϕ0|| e−αt za svako t ≥ 0.
Dokaz: Neka je ϕ1, ϕ2, . . . , ϕn fundamentalni skup resenja sistema DJ (3),takav da je ϕk(0) = ek, gde je ek jedinicni vektor u Rn sa jedinicnom koordinatomna poziciji k i nulama na ostalim. Resenje x = ϕ(t), ϕ(0) = ϕ0 se jedinstvenoizrazava u obliku sume
ϕ(t) =n∑k=1
ϕ0k ϕk(t),
gde je ϕ0 = (ϕ01, ϕ
02, . . . , ϕ
0n)T . Kako prema Lemi 1 postoje pozitivni brojevi qk i α,
tako da je ||ϕk(t)|| ≤ qk e−αt, k = 1, 2, . . . , n, ako oznacimo q = maxq1, q2, . . . , qn,
za svako t ≥ 0 je
||ϕ(t)|| ≤n∑k=1
||ϕk(t)|| · |ϕ0k| ≤
n∑k=1
q ||ϕ0|| e−αt = nq ||ϕ0|| e−αt,
tako da dokaz direktno sledi stavljanjem M = nq.
Primenom prethodne leme izrazava se potreban i dovoljan uslov stabilnostipolozaja ravnoteze x = 0 sistema (3).
Teorema 1 Polozaj ravnoteze x = 0 sistema DJ (3) je asimptotski stabilan ako isamo ako sve sopstvene vrednosti matrice A imaju negativan realni deo.
Dokaz: (⇐:) Neka je x = ϕ(t), ϕ(0) = ϕ0 proizvoljno resenje sistema (3).Posto su ispunjeni uslovi Lema 2, postoje pozitivni brojevi M i α tako da je||ϕ(t)|| ≤ M ||ϕ0|| e−αt za svako t ≥ 0. Za proizvoljno ε > 0 oznacimo δ = ε/r.Ako je ||ϕ0|| < δ, tada je ||ϕ(t)|| ≤ ε za t ≥ 0, pa je po Definiciji 1 polozajravnoteze x = 0 stabilan po Ljapunovu. Sta vise, kako je lim
t→∞||ϕ(t)|| = 0, ovaj
polozaj ravnoteze je asimptotski stabilan po Definiciji 2.(⇒:) Neka je PR x = 0 sistema DJ (3) asimptotski stabilan. Dokazimo da
sve sopstvene vrednosti matrice A imaju negativan realni deo. Pretpostavimosuprotno. Razmotrimo najpre slucaj da postoji λ ∈ R, λ > 0. Neka je v sopstveni
3

vektor odgovarajuci sopstvenoj vrednosti λ, tj. eAtv = eλ tv. Neka je ε > 0proizvoljno i ρ = ε/(2||v||). Jedinstveno resenje sistema DJ (3) koje zadovoljavapocetni uslov je x(0) = x0 = ρ v je x(t) = eAtρv. Kako je PR x = 0 asimptotskistabilan i ||x0|| = ρ||v|| = ε/2 < ε, sledi da ||x(t)|| → 0, t → ∞. Medjutim, zaresenje x(t) imamo da vazi
||x(t)|| = eλtρ||v|| = ε
2eλ t.
Kako je λ > 0 bice ||x(t)|| → ∞ kada t → ∞, sto je suprotno pretpostavci da jePR x = 0 sistema DJ (3) asimptotski stabilan.
Razmotrimo zatim slucaj da postoji λ = α + iβ, α > 0, β 6= 0. Neka jew = u+iv, sopstveni vektor odgovarajuci toj sopstvenoj vrednosti. Realni vektoriu, v su linearno nezavisni i imamo da je
eAtw = eλtw = eαt[cos βt+ i sin βt](u+ iw)
= eαt [(cos βt u− sin βt v) + i(sin βt u+ cos βt v)]
Dakle,
eAtu = eαt(cos βt u− sin βt v)
eAtv = eαt(sin βt u+ cos βt v)
Jedinstveno resenje sistema DJ (3) koje zadovoljava pocetni uslov je x(0) = x0 =ρ u, ρ > 0 je x(t) = eAtρv i vazi
(4) ||x(t)|| = ||eAtu||ρ = ρeαt|| cos βt u− sin βt v||
Kako je PR x = 0 asimptotski stabilan, za ρ = ε/(2||u||) je ||x0|| = ρ||u|| = ε/2 <ε, odakle sledi da ||x(t)|| → 0, t→∞.
Posmatrajmo funkciju h(t) = || cos βt u−sin βt v||. Ako postoji t ∈ R za koje jeh(t) = 0, kako su u, v linearno nezavisni imali bi da je cos βt = 0 i sin βt = 0, stoje nemoguce. Dakle, h(t) 6= 0 za svako t ∈ R. Pored toga, funkcija h je neprekidnai periodicna sa periodom 2π/β, pa postoji m > 0, m = min0≤t≤2π/β h(t). Dakle,iz (4) se dobija ||x(t)|| > mρeαt →∞, t→∞, sto je suprotno pretpostavci da jePR x = 0 sistema DJ (3) asimptotski stabilan.
Definicija 3 Matrica A = [aij]n×n naziva se matrica Hurwitza ako sve sopstvenevrednosti matrice A imaju negativan realni deo.
Dakle, prema prethodnoj teoremi Polozaj ravnoteze x = 0 sistema DJ (3) jeasimptotski stabilan ako i samo ako je matrica A matrica Hurwitza.
Negacija prethodnog tvrdenja, sa ukljucenjem slucaja αk = 0, je tvdjenje:
4

Teorema 2 Ako bar jedna sopstvena vrednost matrice A ima pozitivan realni deo,tada je x = 0 nestabilan polozaj ravnoteze.
Ako je realni deo neke sopstvene vrednost jednak nuli, a u svim ostalim sluca-jevima je negativan, tada je x = 0 stabilan polozaj ravnoteze.
Prema tome, za ispitivanje stabilnosti polozaja ravnoteze sistema DJ (3) bitnoje samo odrediti znak realnih delova sopstvenih vrednosti, ne nalazeci same sop-stvene vrednosti. Imajuci u vidu da se sopstvene vrednosti odreduju kao ko-reni karakteristicnog polinoma stepena n, korisno je znati neke kriterijume kojiomogucavaju ovakvu vrstu zakljucivanja. Jednostavan kriterijum je izrazen lemomRaus–Hurvica (Routh–Hurwitz).
Lema 3 (Lema Raus–Hurvica) Svi koreni jednacine
(5) a0λn + a1λ
n−1 + . . .+ an = 0
imaju negativan realni deo ako i samo ako su pozitivni svi glavni dijagonalni minorimatrice Hurvica
a1 a0 0 0 0 0 . . . 0a3 a2 a1 a0 0 0 0a5 a4 a3 a2 a1 a0 0...0 0 0 0 0 0 an
.Glavni dijagonalni minori su
∆1 = a1, ∆2 =
∣∣∣∣ a1 a0
a3 a2
∣∣∣∣ , ∆3 =
∣∣∣∣∣∣a1 a0 0a3 a2 a1
a5 a4 a3
∣∣∣∣∣∣ , . . .Dakle, potreban i dovoljan uslov stablnosti polozaja ravnoteze sistema (3) je daza koeficijente karakteristicne jednacine vazi a1 > 0, ∆1 > 0, . . . ,∆n > 0. Kakoje ∆n = an∆n−1, uslov ∆n > 0 moze biti zamenjen uslovom an > 0.
Za linearan DS sa konstantnim koeficijentima u R2:
(6) x′ = Ax, A = [aij]2×2
imamo:
• stabilan cvor, stabilna zvezda, stabilan degenerativan cvor i stabilan fokussu asimptotski stabilni PR.
5

• nestabilan cvor, nestabilna zvezda, nestabilan degenerativan cvor, nestabilanfokus i sedlo su nestabilni PR.
• centar je stabilan PR, ali nije asimptotski stabilan.
Ma koji ”sink” DS (6) je asimptotski stabilan i ma koji ”source” ili sedlo DS(6) je nestabilan.
Motivacija
Odgovor na pitanje da li je PR nelinearnog DS (2) stabilan, asimptotski stabilanili nestabilan nije nimalo jednostavno dati. Metod Ljapunova koji ce u nastavkubiti izlozen (iz njegove doktorske disertacije 1892.) daje dosta dobru mogucnostda se da odgovor na to pitanje.
Uocimo funkciju v : Rn → R, koja u nekoj okolini O(0) polozaja ravnotezex = 0 ispunjava uslov v ∈ C(1)(O(0)), i trajektoriju x = x(t) iz te okoline koja utrenutku t0 ≥ 0 ima vrednost x(t0) = x. Tada je izvod funkcije v duz trajektorijex = x(t), u tacki x ∈ O(0),(7)
v(x) =d
dtv(x(t))
∣∣∣t=t0
=n∑i=1
∂v(x(t))
∂xi
dxidt
∣∣∣t=t0
=n∑i=1
∂v(x)
∂xifi(x) = ∇v(x) · f(x).
Ocigledno, izvod v(x) ne zavisi od trajektorije x(t), vec samo od tacke x i jed-noznacno je odreden tom tackom.
Metoda Ljapunova za ispitivanje stabilnosti polozaja ravnoteze x = 0 sistemaDJ (1) zasniva se na monotonosti pozitivno definitne funkcije v(x). Cesto seispitivanje stabilnosti zasniva na pozitivno definitnoj funkciji
v(x) = α1x21 + α2x
22 + · · ·+ αnx
2n,
αi ≥ 0, i = 1, 2, . . . n, α21 + α2
2 + · · ·+ α2n > 0.
Specijalno, za α1 = · · · = αn = 1, funkcija v1(x) =√v(x) je euklidska norma
u Rn. Rascenje ili opadanje rastojanja polozaja ravnoteze x = 0 od proizvoljnetacke x sa trajektorije x = x(t), zavisi od znaka prvog izvoda v1(x) definisanog sa(7). Ako je v1(x) ≤ 0, ne povecava se rastojanje od polozaja ravnoteze do tackekoja se krece trajektorijom kad se t povecava, pa je polozaj ravnoteze stabilan;ako je v1(x) < 0, tada ovo rastojane tezi nuli kad t→∞, pa je polozaj ravnotezeasimptotski stabilan; ako je v1(x) > 0, rastojanje se povecava sa rastom t, stoznaci da se tacke na trajektoriji udaljavaju od polozaja ravnoteze, koji je u tomslucaju nestabilan. Ovo je samo gruba interpretacija metode Ljapunova i motiv
6

za ispitivanje stabilnosti polozaja ravnoteze sistema na osnovu znaka prvog izvodafunkcije v(x).
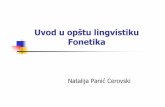
Definicija 4 Funkcija V (x) neprekidna i sa neprekidnim parcijalnim izvodimaprvog reda u okolini O(x?) tacke x?, naziva se funkcija Ljapunova DS (1) akoje
1. V (x?) = 0;
2. V (x) > 0 za svako x ∈ O(x?), x 6= x?;
3. V (x) ≤ 0, x ∈ O(x?).
Stroga funkcija Ljapunova DS (1) je funkcija Ljapunova za koju vazi V (x) <0, x ∈ O(x?) \ x?.
Slika 2: Funkcija Ljapunova
Prema (7), ako je
V (x) = ∇V (x) · dxdt
= ∇V (x) · f(x) < 0,
ugao ϕ izmedju gradijenta funkcije Ljapunova ∇V (x) i vektorskog polja f(x)(Slika 2), odnosno izmedju gradijenta funkcije Ljapunova ∇V (x) i vectora tan-gente fazne trajektorije, u proizvoljnoj tacki x faznog prostora, je veci od 90.
5.2. Direktni metod Ljapunova
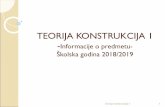
Teorema 3 [Teorema stabilnosti Ljapunova] Neka je za sistem DJ (1) funkcijaf ∈ C(1)(D) i tacka x = 0 polozaj ravnoteze. Ako u nekoj okolini O(0) postojifunkcija Ljapunova DS (1), polozaj ravnoteze x = 0 je stabilan.
7

Slika 3: Teorema stabilnosti i asimptotske stabilnosti Ljapunova
Dokaz: Fiksirajmo ε > 0 i izaberimo r ∈ (0, ε] tako da
Br = x ∈ Rn : ||x|| ≤ r ⊂ D.
Kako je ∂Br kompakt, a V (x) je neprekidna funkcija, postoji mr = min||x||=r V (x).Jasno, mr > 0 jer je V (x) > 0 za x 6= 0. Izaberimo β ∈ (0,mr) i definisimo
Ωβ = x ∈ Br : V (x) ≤ β.
Pokazimo da ako x(0) ∈ Ωβ onda x(t) ∈ Ωβ za svako t > 0. Zaista, kako jeV (x) ≤ 0 za x ∈ O(0), za svako t > 0 imamo
(8) V (x(t))− V (x(0)) =
∫ t
0
d
dsV (x(s)) ds ≤ 0 ⇒ V (x(t)) ≤ V (x(0)) ≤ β .
Tada Ωβ ⊂ int(Br), jer u suprotnom ako bi za neko t1 > 0 bilo ||x(t1)|| = r, imalibi V (x(t1)) ≥ mr > β, a to je u suprotnosti sa nejednakoscu (8).
Iz neprekidnosti funkcije V (x) i uslova V (0) = 0, sledi da postoji δ > 0, takoda je V (x) < β za ||x|| < δ, tj. ako x ∈ Nδ(0), onda x ∈ Ωβ.
Dakle, Nδ(0) ⊂ Ωβ ⊂ Br i
x(0) ∈ Nδ(0) ⇒ x(0) ∈ Ωβ ⇒ x(t) ∈ Ωβ ⇒ x(t) ∈ Br ⇒ x(t) ∈ Nε(0) .
Konacno, za svako ε > 0, postoji δ > 0 tako da za svako ||x(0)|| < δ je ||x(t)|| <r ≤ ε za svako t > 0, pa je po Definiciji 1 polozaj ravnoteze x = 0 stabilan.
Teorema 4 [Teorema asimptotske stabilnosti Ljapunova] Neka je za sis-tem DJ (1) funkcija f ∈ C(1)(D) i tacka x = 0 polozaj ravnoteze. Ako u nekojokolini O(0) postoji stroga funkcija Ljapunova DS (1), polozaj ravnoteze x = 0 jeasimptotski stabilan.
8

Dokaz: Neka je V (x) < 0 za svako x ∈ O(0)\0. Tada je V (x) strogo opadajucafunkcija duz trajektorija sistema (1). Na osnovu Teoreme 3 x = 0 stabilan polozajravnoteze. Ostaje da pokazemo da postoji δ > 0 tako da za svako x(0) ∈ Nδ(0) jelimt→∞ x(t) = 0, tj. da za svako ε > 0 postoji T > 0 tako da za svako x ∈ Nδ(0) isvako t ≥ T je ||x(t)|| < ε. U Dokazu Teoreme 3 smo pokazali da za svako ε > 0postoji β > 0 tako da Ωβ ⊂ Nε(0). Zato je sada dovoljno pokazati da je za svakox(0) ∈ Nδ(0)
(9) limt→∞
V (x(t)) = 0 .
Naime, to znaci da za svako β > 0 postoji T > 0 tako da za svako t ≥ T jeV (x(t)) < β, tj. x(t) ∈ Ωβ ⊂ Nε(0).
Kako je funkcija V (x) monotono opadajuca duz trajektorije x(t) i odozdoogranicena
(10) limt→∞
V (x(t)) = c ≥ 0 .
Pretpostavimo suprotno, da je c > 0. Neka je
Ωc = x ∈ Br : V (x) ≤ c
Zbog neprekidnosti V (x) i V (0) = 0, postoji η > 0 tako da je
Bη = x ∈ Rn : ||x|| ≤ η ⊂ Ωc
Kao je c > 0 trajektorija x(t) ne pripada Bη, odnosno pripada kompaktu
Π = x ∈ Rn : η ≤ ||x|| ≤ r.
Oznacimo maxx∈Π V (x) = −m < 0. Za svako t > 0 imamo
V (x(t)) = V (x(0)) +
∫ t
0
d
dsV (x(s))ds ≤ V (x(0))−mt .
Dakle, postoji t0 > 0 tako daje V (x(t)) < 0 za t > t0, odakle sledi da je c < 0.Dobijena kontradikcija pokazuje da je x = 0 asimptotsi stabilan PR.
Podsetimo se da ako postoji stroga funkcija Ljapunova DS (1) prema Teoremi4.3. ne postoje zatvorene trajektorije DS.
Teorema 5 [Teorema nestabilnosti Ljapunova] Neka je za sistem DJ (1)funkcija f ∈ C(1)(D) i tacka x = 0 polozaj ravnoteze. Ako u nekoj okolini O(0)postoji funkcija v ∈ C(1)(O(0)) koja je pozitivno definitna i zadovoljava uslovv(x) > 0 za x ∈ O1(0) \ 0, O1(0) ⊆ O(0), polozaj ravnoteze x = 0 je nestabilan.
9

Dokaz: Neka je M maksimum neprekidne funkcije v(x) na kompaktu Kε(0).Kako je v(x) > 0 za x 6= 0, funkcija v(x) je strogo rastuca duz trajektorija sistema(1) koje su u Kε(0) \ 0. Ako je proizvoljna trajektorija x = x(t), x(t0) = x0 ix0 ∈ Kδ(0) \ 0 za svako 0 < δ < ε, tada je
v(x(t)) > v(x0), t > t0.
Kako je v(x) > 0 za x 6= 0, sledi inft≥t0 v(x(t)) = m > 0. Integracijom relacijev(x(s)) ≥ m na segmentu [t0, t] dobija se
v(x(t))− v(x0) ≥ mt, t ≥ t0.
Dakle, za dovoljno veliko t1 je
v(x(t)) > mt1 > M,
sto znaci da sa protokom vremena trajektorija x = x(t) napusta kuglu Kε(0) ine vraca se vise u nju. Dakle, za ||x0|| < δ je ||x(t)|| > ε za t > t1, pa je x = 0nestabilan polozaj ravnoteze sistema DJ (1).
Funkcija Ljapunova gradijentnog sistema
Definicija 5 Neka je E ⊂ Rn i G ∈ C2(E). Nelinearan DS oblik
(11) x′ = −∇G(x), ∇G =
(∂G
∂x1, . . . ,
∂G
∂xn
)Tnaziva se gradijenti DS sa potencijalnom funkcijom G.
PR x = x? gradijentnog DS je tacka za koju je ∇G(x?) = 0, dakle stacionarnatacka potencijalne funkcije G(x). Kako je prema (7)
(12) G(x) = ∇G(x) · (−∇G(x)) = −||∇G(x)||2 ,
zakljucujemo da je G(x) ≤ 0, pa je prema tome potencijalna funkcija G(x) gradi-jentnog sistema dobar kandidat za funkciju Ljapunova tog DS. Stavise, G(x?) = 0ako i samo ako je x? polozaj ravnoteze DS.
Teorema 6 Neka je x = x? PR gradijentnog DS (11). Pozitivna funkcija V (x) =G(x)−G(x?), x 6= x? je funkcija Ljapunova tog DS PR x = x?.
10
Dokaz. Kako je V (x?) = 0 i prema (12) je V (x) = G(x) = −||∇G(x)||2 ≤ 0,pozitivna funkcija V (x) je funkcija Ljapunova gradijentnog DS (11).
Dakle, ako je stacionarna tacka x = x? potencijalne funkcije G(x) njena min-imalna vrednost, tj. G(x) > G(x?), x 6= x?, prema Teoremi 6, onda je V (x) =G(x)−G(x?) stroga funkcija Ljapunova gradijentnog DS (jer je V (x) = G(x) < 0za x 6= x?), pa je PR x? asimptotski stabilan.
Teorema 7 Ako je PR gradijentnog DS (11) x = x? tacka lokalnog minimumapotencijalne funkcije G(x), onda je taj PR asimptotski stabilan.
Napomena. U Teoremi 3.10. pokazano je da ako je PR gradijentnog DS tackalokalnog minimuma potencijalne funkcije G(x), onda je taj PR nelinearan stabilancvor tog DS.
5.3. Indirektni metod Ljapunova
Direktni metod Ljapunova nam daje odgovor na pitanje kada je PR nelinearnogDS (1) asimptotski stabilan, stabilan ili nestabilan. Indirektni metod Ljapunovanam daje odgovor na to pitanje posmatrajuci odgovarajuci linearizovan sistem
(13) x′ = Ax, A = Df(0) .
Potrazimo funkciju Ljapunova u obliku
V (x) = xTPx =n∑i=1
n∑j=1
pijxixj
gde je P = [pij]n×n realna, simetricna (P = P T ), pozitivno definitna matrica.Tada je
V (x) = (x′)TPx+ xTPx′ = xT (ATP + PA)x = −xTQx .
Ako postoji Q = QT > 0 tako da je
(14) −Q = ATP + PA
onda je V (x) pozitivno definitna i V (x) < 0, pa je x = 0 je asimptotski stabilanPR. Jednacina (14) se naziva matricna jednacina Ljapunova.
Formulacija matricnog problema: Za datu simetricnu, pozitivno definitnu ma-tricu Q, naci ako postoji P = P T > 0 koja zadovoljava matricnu jednacinu Lja-punova.
11

Malo linearne algebre.
Kvadratna matrica P se moze dijagonalizirati ako postoji invertibilna ma-trica T takva da je T−1PT dijagonalna matrica.
Kvadratna matrica P reda n je pozitivno definitna ako je xTPx > 0 za svakinenula vektor x - u oznaci P > 0.
Invertibilna matrica P je ortogonalna ako je P−1 = P T .
Lema 4 Kvadratna matrica P reda n moze se dijagonalizirati akko ima n linearnonezavisnih sopstvenih vektora.
Dokaz. (⇒:) Neka se kvadratna matrica P reda n moze dijagonalizirati, odnosnopostoji invertibilna matrica T takva da je T−1PT dijagonalna matrica D. Ondaje PT = TD. Neka je
T =
t11 t12 · · · t1nt21 t22 · · · t2n...
......
tn1 tn2 · · · tnn
= (t1 t2 · · · tn) , D =
λ1 0 · · · 00 λ2 · · · 0...
......
0 0 · · · λn
Tada je
TD =
λ1t11 λ2t12 · · · λnt1nλ1t21 λ2t22 · · · λnt2n
......
...λ1tn1 λ2tn2 · · · λntnn
= (λ1t1 λ2t2 · · · λntn) .
S druge strane je
PT = P (t1 t2 · · · tn) = (Pt1 Pt2 · · · Ptn) .
Dakle,
(15) Ptj = λjtj, j = 1, 2, . . . , n .
Kako je matrica T invertibilna, njeni vektori kolona tj su nenula vektori, pa (15)znaci da su tj sopstveni vektori matrice P , a λj njima odgovarajuce sopstvenevrednosti. Vektori kolone invertibilne matrice su linearno nezavisni, sto znaci damatrica P ima n linearno nezavisnih sopstvenih vektora.(⇐:) Neka matrica P ima n linearno nezavisnih sopstvenih vektora t1, t2, . . . , tni neka su λj, j = 1, 2, . . . , n njima odgovarajuce sopstvene vrednosti. Tada vazi
12

(15). Neka je T matrica ciji su vektori kolona vektori tj, j = 1, 2, . . . , n, tj.T = (t1 t2 · · · tn). Kako su tj, j = 1, 2, . . . , n linearno nezavisni, matrica T jeinvertibilna. Tada je
PT = (Pt1 Pt2 · · · Ptn) = (λ1t1 λ2t2 · · · λntn) = TD,
gde je D dijagonalna matrica koja na glavnoj dijagonali ima sopstvene vrednostiλj, j = 1, 2, . . . , n. Kako je T invertibilna, vazi T−1PT = D, sto znaci da sekvadratna matrica P moze dijagonalizirati.
U I delu u Teoremi 4.2. pokazali smo
Lema 5 Neka su v1, v2, . . . , vn sopstveni vektori kvadratne matrice P reda n odgo-varajuci razlicitim sopstvenim vrednostima λ1, λ2, . . . , λn. Tada su v1, v2, . . . , vnlinearno nezavisni vektori.
Lema 6 Ako kvadratna matrica P reda n ima n razlicitih sopstvenih vrednosti,onda se ona moze dijagonalizirati.
Dokaz. Neka su v1, v2, . . . , vn sopstveni vektori kvadrane matrice P reda n odgo-varajuci razlicitim sopstvenim vrednostima λ1, λ2, . . . , λn. Tada su prema Lemi5 v1, v2, . . . , vn linearno nezavisni vektori, pa se prema Lemi 4 matrica P mozedijagonalizirati.
Lema 7 Ako je matrica P simetricna, onda su sopstveni vektori odgovarajucinjenim razlicitim sopstvenim vrednostima ortogonalni.
Dokaz. Neka su vj, vk sopstveni vektori odgovarajuci razlicitim sopstvenim vred-nostima λj 6= λk simetricne marice P . Onda je Pvj = λjvj, Pvk = λkvk. Tadaje
λjvjvk = Pvjvk = vjPTvk = vjPvk = vjλkvk = λkvjvk
odnosno (λj − λk)vjvk = 0 i kako je λj 6= λk, zakljucujemo da je vjvk = 0.
Lema 8 Matrica P je ortogonalna ako i samo ako njeni vektori kolona cineortonormirani skup vektora u Rn.
Dokaz. Neka je P =(p1 p2 . . . pn
)tj. pi su vektori kolona matrice P . Tada
su vrste matrice P T : pT1 , pT2 , . . . , p
Tn , tako da je P TP = (pTi pj). Dakle, P je
ortogonalna akko je P TP = P−1P = I akko pTi pj = 0 za i 6= j i pTi pi = 1,i = 1, 2, . . . , n akko vektori kolona pi matrice P cine ortonormirani skup vektorau Rn.
13

Lema 9 Matrica P se moze dijagonalizirati ortogonalnom matricom, tj. postojiortogonalna matrica Q, tako da je Q−1PQ = QTPQ dijagonalna matrica ako isamo ako je P simetricna matrica.
Dokaz. (⇒:) Neka se matrica P moze dijagonalizirati ortogonalnom matricom,tj. postoji ortogonalna matrica Q, tako da je Q−1PQ = QTPQ = D, odnosnoP = QDQT . Tada je P T = (QDQT )T = QDTQT = QDQT = P , odnosno P jesimetricna matrica.(⇐:) Ako je P simetricna matrica reda n, njene sopstvene vrednosti su realne ipostoji n ortonormiranih sopstvenih vektora v1, . . . , vn odgovarajucih sopstvenimvrednostima λ1, . . . , λn ∈ R. Matrica Q ciji su vektori kolone vektori vk je premaLemi 8 ortogonalna. Pored toga, kako je Pvk = λkvk, k = 1, 2, . . . , n, sledi kao udokazu Leme 4 da je PQ = QD, odnosno da je Q−1PQ = D.
Lema 10 Neka je P simetricna matrica. Matrica P je pozitivno definitna ako isamo ako su sve sopstvene vrednosti matrice P pozitivne, tj. λi(P ) > 0 za svakoi.
Dokaz. (⇒:) Neka je matrica P pozitivno definitna. Pretpostavimo suprotno daje λ ≤ 0 sopstvena vrednost matrice P i v odgovarajuci sopstveni vektor. Tada jePv = λ v, odnosno vTPv = λ vTv = λ||v||2 ≤ 0, kontradikcija sa pretpostavkomda je P pozitivno definitna.(⇐:) Neka su sve sopstvene vrednosti matrice P pozitivne i neka je x 6= 0 vektor zakoji je xTPx ≤ 0. Tada prema Lemi 9 postoji ortogonalna matrica Q (QTQ = I),tako da jeQ−1PQ dijagonalna matrica, odnosno P = QDQT , gde jeD dijagonalnamatrica sa sopstvenim vrednostima λi, i = 1, 2, . . . , n na glavnoj dijagonali. Zay 6= 0, tako da je x = Qy, imamo
0 ≥ xTPx = yTQTPQy = yTQTQDQTQy = yTDy =∑i
λiy2i > 0,
kontradikcija. Dakle, za svaki vektor x 6= 0 je xTPx > 0.
Lema 11 Neka je P simetricna matrica. Funkcija V (x) = xTPx je pozitivna akoi samo ako su sve sopstvene vrednosti matrice P pozitivne, tj. λi(P ) > 0 za svakoi.
Dokaz. Kako je P simetricna, postoji ortogonalna matrica Q tako da je P =QDQT , gde je D dijagonalna matrica. Neka je y = QTx. Tada je
(16) V (x) = xTPx = xTQDQTx = yTDy =∑i
λiy2i
Dakle, V (x) > 0 za svako x 6= 0 akko λi > 0, 1 ≤ i ≤ n.
14

Lema 12 Za simetricnu matricu P vazi
(17) λmin(P )||x||2 ≤ xTPx ≤ λmax(P )||x||2,
gde je λmin(P ), λmax(P ) najmanja, odnosno najveca sopstvena vrednost matriceQ.
Dokaz. Na osnovu (16) imamo
xTPx = xTQDQTx =(QTx
)TD(QTx
)=∑i
λi(qTi x)2 ≤ λmax
n∑i=1
(qTi x)2
= λmax(QTx
)T(QTx
)= λmax x
TQQTx = λmax xTx = λmax ||x||2
Levu stranu nejednakosti pokazujemo analogno.
Teorema 8 Neka je data matrica A = [aij]n×n. Sledeca tvrdjenja su ekvivalentna:(i) Matrica A je matrica Hurwitza.(ii) Za svako Q = QT > 0 postoji jedinstvena matrica P = P T > 0 koja je
resenje matricne jednacine Ljapunova (14).
Dokaz. (i) ⇒ (ii) : Neka sve sopstvene vrednosti matrice A imaju negativanrealni deo i neka je Q = QT > 0. Dokazacemo da matrica
(18) P =
∫ ∞0
eAT tQeAtdt
zadovoljava matricnu jednacinu Ljapunova (14). Kako je prema Teoremi 5.1.-(vi),(eAx)T
= eATx, ocigledno je P = P T > 0. Kako je matrica A Hurwitzova integral
u (18) je konvergentan, jer je
limt→∞
∣∣∣∣eAt∣∣∣∣1
= limt→∞
∣∣∣∣eAT t∣∣∣∣
1= 0 .
Imamo da je
ATP + PA =
∫ ∞0
(ATeA
T tQeAt + eAT tQeAtA
)dt =
∫ ∞0
d
dt
(eA
T tQeAt)dt
= limt→∞
eAT tQeAt −Q .
Kako je A matrica Hurwitza, eAT t → 0 i eAt → 0 kada t → ∞, i iz prethodne
jednakosti dobijamo ATP + PA = −Q, odnosno matrica P zadovoljava matricnujednacinu Ljapunova (14).
15

Da bi pokazali jedinstvenost, pretpostavimo da postoji matrica P1 = P T1 > 0
koja zadovoljava (14). Tada je
AT (P − P1) + (P − P1)A = 0,
odakle sledi
0 = eAT t[AT (P − P1) + (P − P1)A]eAt =
d
dt
(eA
T t(P − P1)eAt).
Dakle, eAT t(P − P1)e
At je konstantna matrica za svako t ∈ R, pa i za t = 0
(19) I(P − P1)I = P − P1 = eAT t(P − P1)e
At.
Kako je eAT t(P − P1)e
At → 0, t→∞, zakljucujemo prema (19) da je P = P1.(ii) ⇒ (i) : Pretpostavimo da postoji jedinstvena matrica P = P T > 0 koja
je resenje matricne jednacine Ljapunova (14). Tada je funkcija V (x) = xTPxfunkcija Ljapunova DS (13), pa je x = 0 je asimptotski stabilan PR linearnogDS sa konstantnim koeficijentima (13). Prema Teoremi 1 matrica A je matricaHurwitza.
Teorema 9 Neka je x = 0 PR nelinearnog DS (1), f ∈ C1(D) i neka je matricaA = Df(0).
(i) Ako je matrica A matrica Hurwitza, x = 0 je asimptotski stabilan PR DS(1).
(ii) Ako je Re(λi) > 0 za bar jednu sopstvenu vrednost λi matrice A, x = 0 jenestabilan PR DS (1).
Dokaz. (I) Ako je matrica A matrica Hurwitza, postoji matrica P = P T > 0tako da je funkcija V (x) = xTPx funkcija Ljapunova linearizovanog DS (13).
Prema teoremi o srednjoj vrednosti imamo
fi(x) = fi(0) +∂fi∂x
(ξi)x, za svako x ∈ D,
gde je ξi tacka na pravoj koja povezuje tacku x sa koordinatnim pocetkom. Kakoje f(0) = 0 imamo
fi(x) =∂fi∂x
(ξi)x =∂fi∂x
(0)x+
[∂fi∂x
(ξi)−∂fi∂x
(0)
]x, za svako x ∈ D,
odnosno f(x) = Ax+ g(x), gde je A = Df(0) i
gi(x) =
[∂fi∂x
(ξi)−∂fi∂x
(0)
]x .
16

Dakle, funkcija g(x) zadovoljava
|gi(x)| ≤∣∣∣∣∣∣∣∣∂fi∂x
(ξi)−∂fi∂x
(0)
∣∣∣∣∣∣∣∣ · ||x|| .Kako je f ∈ C1(D) zakljucujemo da je
(20)||g(x)||||x||
→ 0, ||x|| → 0 .
Dokazimo da je V (x) funkcija Ljapunova nelinearnog DS
x′ = f(x) = Ax+ g(x), g(x) = f(x)− Ax
Dobijamo
V (x) = xTPf(x) + f(x)TPx = xTP(Ax+ g(x)
)+(xTAT + g(x)T
)Px
= xT (PA+ ATP )x+ xTPg(x) + g(x)TPx(21)
= −xTQx+ 2xTPg(x) .
Prema (20) sledi da za svako γ > 0 postoji r > 0 tako da je ||g(x)|| < γ||x|| zasvako ||x|| < r, tako da iz (21) i (17) dobijamo
V (x) < −(λmin(Q)− 2γ||P ||)||x||2, za svako ||x|| < r.
Dakle, za
γ <λmin(Q)
2||P ||zakljucujemo da je V (x) < 0 za svako ||x|| < r, odnosno da je PR x = 0 asimp-totski stabilan.
Napomena. Pretpostavimo da je V (x) < 0 za svako ||x|| < r. Ako uzmemo daje c = min||x||=r x
TPx = λmin(P )r2 imamo
Ω = x : V (x) < c ⊂ x : ||x|| < r .
Sve trajektorije koje krecu iz oblasti Ω priblizavaju se PR kada t → ∞ - oblastse naziva oblast privlacnosti PR.
Primetimo pre svega da ako je Re(λi) ≤ 0 za svako i = 1, 2, . . . , n pri cemuRe(λj) = 0 za neke j ∈ 1, 2, . . . , n Teorema 9 ne daje odgovor na pitanje ostabilnosti PR. Dakle, o stabilnost ma kog hiperbolickog PR DS (1) moze sezakljuciti linearizacijom. Hiperbolicki PR DS (1) je ili asimptotski stabilan ili
17

nestabilan, tj. stabilni PR koji nije asimptotski stabilan moze se traziti jedinomedu nehiperbolickim PR. Prema tome, jedina mogucnost kada PR x0 DS (1)moze biti stabilan, ali da nije asimptotski stabilan je kada Jakobijan Df(x0) imasopstvenu vrednost nula ili par konjugovano-kompleksnih sopstvenih vrednosti cijeje realni deo nula.
Primer 5.1. Za DSx′ = −y3, y′ = x3
tacka (0, 0) je jedini PR. Kako je
J(0, 0) =
(0 00 0
)ne moze se primeniti Teorema 9 i stabilnost PR ne moze se uvrditi linearizacijom.
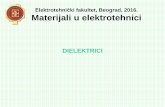
Posmatrajmo funkciju V (x, y) = x4+y4 koja je pozitivno definitna i neprekidnodiferencijabilna na R2. Kako je V (x, y) = 4x3x′ + 4y3y′ = −4x3y3 + 4y3x3 = 0,prema Teoremi 3 PR (0, 0) je stabilan. Trajektorije DS leze na zatvorenoj krivojx4 + y4 = C, C > 0. Trajektorije koje polaze iz neke okoline PR ostaju u tojokolini kada t → ∞, ali ne teze ka koordinatnom pocetku kada t → ∞, tako da(0, 0) nije asimptotski stabilan PR. Fazni portret je prikazan na Slici 4 i vidimoda je PR centar nelinearnog DS.
-4 -2 0 2 4
-4
-2
0
2
4
Slika 4: Fazni portret DS u Primeru 5.1. - PR (0, 0) je nelinearan centar
Primer 5.2. Za DSx′ = −y, y′ = x+ y(x2 − 1)
tacka (0, 0) je jedini PR. Kako je
A = J(0, 0) =
(0 −11 −1
)18

cije su sopstvene vrednosti−1± i
√3
2. Dakle, PR je stabilni fokus linearizovanog
DS i kako je matrica A = J(0, 0) matrica Hurwitza prema Teorema 9 x = 0 jeasimptotski stabilan PR.
Neka je Q = I. Tada je resenje matricne jednacine Ljapunova(−1 00 −1
)= −I = ATP + PA
=
(0 1−1 −1
)(p11 p12
p21 p22
)+
(p11 p12
p21 p22
)(0 −11 −1
)je
P =
(3/2 −1/2−1/2 1
)cije su sopstvene vrednosti
1
4
(5±√
5), tako da je λmin(P ) ≈ 0.691. Funkcija
Ljapunova datog DS je
V (X) = XTPX =3
2x2 − xy + y2
za koju jeV (X) = ∇V (X) · f(X) = −(x2 + y2)− x2y(x− 2y)
odakle zakljucujemo kako je
|x| ≤ ||X||2, |xy| ≤ 1
2||X||2 =
√x2 + y2
2, |x− 2y| ≤
√5 ||X||
da je
V (X) ≤ −||X||2 + |x| · |xy| · |x− 2y| ≤ −||X||2 +
√5
2||X||4
odnosno
V (X) < 0 za 0 < ||X||2 < 2√5
= r2
Za c = λmin(P )r2 ≈ 0.618 zakljucujemo da je (x, y) : V (x, y) < c oblastprivlacnosti PR.
Primer 5.3. Za DS
x′ = −8x− xy2 − 3y3, y′ = 2x2y + 2xy2
imamo tri PR (0, 0), (−2, 2) i (2,−2). Kako je
J(2,−2) = J(−2, 2) =
(−12 −28−8 −8
)19

cije su sopstvene vrednosti λ1,2 = −10±2√
57, PR (−2, 2) i (2,−2) su hiperbolicniPR i sedla odgovarajucih linearizovanih sistema, dakle nestabilni PR datog DS.Kako je
J(0, 0) =
(−8 00 0
)ne moze se primeniti Teorema 9 i stabilnost PR (0, 0) ne moze se uvrditi lin-earizacijom.
-4 -2 0 2 4
-4
-2
0
2
4
Slika 5: Fazni portret DS u Primeru 5.3.
Posmatrajmo funkciju V (x, y) = 2x2+3y2 koja je pozitivno definitna i neprekidnodiferencijabilna na R2 i
V (x, y) = 4x(−8x− xy2 − 3y3) + 6y(2x2y + 2xy2) = 8x2(y2 − 4)
Dakle, V (x, y) ≤ 0 za |y| ≤ 2 i V (x, y) = 0 za x = 0 ili y = ±2. Za x = 0 jex′ = −3y3 i y′ = 0, sto znaci da trajektorije ne ostaju na y−osi kada t → ∞.Za y = ±2 je x′ = −12x ∓ 24, y′ = ±4x2 + 8x, odnosno trajektorije napustajuove prave kada t → ∞. Prema tome, V (x, y) < 0 za |y| < 2, odakle sledi da jeV (x, y) < 0 kada je V (x, y) = 2x2 + 3y2 < 12. Trajektorije koje polaze iz neketacke unutar elipse 2x2 + 3y2 = 12 teze ka koordinatnom pocetku, pa je PR (0, 0)asimptotski stabilan.
Primer 5.4. Ispitajmo stabilnost PR (0, 0, 0) DS
x′ = −2y + yz, y′ = x− xz, z′ = xy
20

Kako je
J(0, 0, 0) =
0 −2 01 0 00 0 0
sopstvene vrednosti su λ1 = 0, λ2,3 = ±i
√2. Dakle, ne moze se primeniti Teorema
9 i stabilnost PR ne moze se uvrditi linearizacijom.Posmatrajmo funkciju V (x, y) = αx2 + βy2 + γz2 koja je za α, β, γ ∈ R+
pozitivno definitna i neprekidno diferencijabilna na R3. Kako je
V (x, y, z) = ∇V (x) · f(x) = (2αx, 2βy, 2γz) · (−2y + yz, x− xz, xy)
= 2αxy(z − 2) + 2βyx(1− z) + 2γzxy
= 2[xyz(α− β + γ)zxy + (−2α + β)xy
],
za β = 2α i γ = α je V (x, y, z) = 0 na R3, pa prema Teoremi 3 PR (0, 0, 0) jestabilan. Specijalno za α = 1 trajektorije DS leze na elipsoidu x2 + 2y2 + z2 = C2.
21