
4.4 Distanza riemanniana e geodetiche - mat.uniroma1.it · Teoria ed Esercizi di Geometria Di...
12
Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 1 4.4 Distanza riemanniana e geodetiche Su una variet` a riemanniana (S, g) la metrica permette di parlare di lunghezza di una curva γ :[a, b] → S, definita come ‘(γ )= R b a kγ 0 (t)kdt. Ne segue che una variet` a riemanniana ` e dotata di una distanza naturale, che la rende uno spazio metrico di lunghezza: Definizione 4.4.1 (Distanza intrinseca e distanza estrinseca) Sia S una variet` a riemanniana connessa: la distanza riemanniana (o intrinseca) su S ` e la funzione d S (P,Q) = inf {‘(γ ) | γ :[a, b] → S curva C 1 a tratti, γ (a)= P,γ (b)= Q} (` e facile verificare che d S ` e una distanza su S). Sia ora S una sottovariet` a di R n : su di essa ` e possibile considerare anche la distanza euclidea d(P,Q)= ||P - Q||; vediamo dunque S, in tal caso, come sottospazio metrico di R n . Due fatti fondamentali (ma di non immediata dimostrazione 1 ) sono: (i) la distanza riemanniana induce su S la stessa topologia che S possiede come variet` a differenziabile; (ii) per una sottovariet` a S ⊂ R n la distanza riemanniana e la distanza euclidea sono equivalenti (inducono cio` e la stessa topologia). Definizione 4.4.2 (Curve minimizzanti) Una curva γ : I =[a, b] → S tale che d(γ (a),γ (b)) = ‘(γ ) si dice una curva minimizzante. La curva γ si dice invece localmente minimizzante se per ogni t ∈ I esiste un intorno di t su cui γ ` e minimizzante. Una geodetica (risp. una geodetica locale)` e una curva minimizzante (risp. lo- calmente minimizzante) parametrizzata a velocit` a costante. L’immagine di una geodetica tra A e B su S ` e detto un segmento geodetico, ed ` e denotato, con lieve abuso di notazione 2 , AB. Al contrario di ci` o che accade nello spazio euclideo, una curva minimizzante tra A e B pu`ononesistere, e se esiste non ` e in generale unica, come mostrano gli esempi qui di seguito. Una sottovariet` a S si dice completa se per ogni A, B ∈ S esiste sempre una curva minimizzante da A a B. Un teorema importante di geometria riemanniana (dovuto a Heintz Hopf e a W.Rinow) afferma che ci` o` e equivalente a chiedere che lo spazio (S, d S ) sia completo come spazio metrico. Esempio 4.4.3 Sia S = R 2 \ [-1, 1]. Si ha allora d S 6= d (perch´ e?). Inoltre, se γ ` e una curva di S con γ (a)= A =(0, 1) e γ (b)= B =(0, -1), allora si ha sempre ‘(γ ) >d S (A, B). S ` e completa? 1 Tramite la definizione e l’uso delle coordinate polari ` e infatti possibile mostrare che le due distanze definiscono gli stessi sistemi fondamentali di intorni per ogni punto. 2 Notare infatti che un segmento geodetico tra A e B non ` e in generale unico, dunque la notazione AB pu`o essere fuorviante.
Transcript of 4.4 Distanza riemanniana e geodetiche - mat.uniroma1.it · Teoria ed Esercizi di Geometria Di...
Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 1
4.4 Distanza riemanniana e geodetiche
Su una varieta riemanniana (S, g) la metrica permette di parlare di lunghezza
di una curva γ : [a, b]→ S, definita come `(γ) =∫ ba‖γ′(t)‖dt. Ne segue che una
varieta riemanniana e dotata di una distanza naturale, che la rende uno spaziometrico di lunghezza:
Definizione 4.4.1 (Distanza intrinseca e distanza estrinseca)Sia S una varieta riemanniana connessa: la distanza riemanniana (o intrinseca)su S e la funzione
dS(P,Q) = inf`(γ) | γ : [a, b]→S curva C1 a tratti, γ(a)=P, γ(b)=Q(e facile verificare che dS e una distanza su S).Sia ora S una sottovarieta di Rn: su di essa e possibile considerare anche ladistanza euclidea d(P,Q) = ||P − Q||; vediamo dunque S, in tal caso, comesottospazio metrico di Rn.Due fatti fondamentali (ma di non immediata dimostrazione1) sono:(i) la distanza riemanniana induce su S la stessa topologia che S possiede comevarieta differenziabile;(ii) per una sottovarieta S ⊂ Rn la distanza riemanniana e la distanza euclideasono equivalenti (inducono cioe la stessa topologia).
Definizione 4.4.2 (Curve minimizzanti)Una curva γ : I = [a, b] → S tale che d(γ(a), γ(b)) = `(γ) si dice una curvaminimizzante. La curva γ si dice invece localmente minimizzante se per ognit ∈ I esiste un intorno di t su cui γ e minimizzante.Una geodetica (risp. una geodetica locale) e una curva minimizzante (risp. lo-calmente minimizzante) parametrizzata a velocita costante.L’immagine di una geodetica tra A e B su S e detto un segmento geodetico, ede denotato, con lieve abuso di notazione2, AB.
Al contrario di cio che accade nello spazio euclideo, una curva minimizzantetra A e B puo non esistere, e se esiste non e in generale unica, come mostrano gliesempi qui di seguito. Una sottovarieta S si dice completa se per ogni A,B ∈ Sesiste sempre una curva minimizzante da A a B. Un teorema importante digeometria riemanniana (dovuto a Heintz Hopf e a W.Rinow) afferma che cio eequivalente a chiedere che lo spazio (S, dS) sia completo come spazio metrico.
Esempio 4.4.3 Sia S = R2 \ [−1, 1]. Si ha allora dS 6= d (perche?).Inoltre, se γ e una curva di S con γ(a)=A=(0, 1) e γ(b)=B=(0,−1), allora siha sempre `(γ) > dS(A,B). S e completa?
1Tramite la definizione e l’uso delle coordinate polari e infatti possibile mostrare che le duedistanze definiscono gli stessi sistemi fondamentali di intorni per ogni punto.
2Notare infatti che un segmento geodetico tra A e B non e in generale unico, dunque lanotazione AB puo essere fuorviante.

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 2
Esercizio 4.4.4 (Geodetiche del piano euclideo)Siano P,Q ∈ E2. Dimostrare che la curva piu corta che unisce P a Q e ilsegmento PQ (parametrizzato in modo opportuno).
Suggerimento:– Scrivere una curva γ da P a Q in coordinate polari di centro P .– Cosa rappresentano geometricamente i due addendi nella formula |γ′| =
√r′2 + r2ϑ′2?
(Questa strada non e l’unica possibile, ma e utile per l’esercizio seguente).
♥ Esercizio 4.4.5 (Geodetiche della sfera)(i) Siano P,Q ∈ S2 non antipodali: dimostrare che la curva piu corta su S2 cheunisce P a Q e un arco di cerchio massimo (parametrizzato in modo opportuno)di lunghezza inferiore a π.
Suggerimento: mettere P nel polo nord, e spezzare il vettore γ′ in una componente radiale
(tangente ai meridiani) ed una ortogonale (tangente ai paralleli); adattare quindi l’argomento
dell’esercizio predente.
(ii) Risolvere il punto precedente senza far uso di derivate e integrali.Suggerimento: ricordare che la lunghezza di una curva e definita (senza l’uso di derivate!)come `(γ) = supPγ `(Pγ), dove Pγ e una poligonale approssimante per γ.
♥ Esercizio 4.4.6 (Trigonometria sferica)Consideriamo un triangolo sferico non degenere ABC, cioe tre punti sulla sferauniti da tre geodetiche, che non giacciano tutti sullo stesso cerchio massimo.Supponiamo che il triangolo abbia angoli ai vertici A,B,C uguali rispettiva-mente ad α, β, γ e lati opposti ai vertici di lunghezza a, b, c.
(i) Dimostrare la Formula del Coseno e il Teorema di Pitagora sulla sfera:
cos c = cos a cos b+ sin a sin b cos γ
cos c = cos a cos b se γ = π/2
Suggerimento. Si metta C nel polo nord, quindi:
- si considerino i vettori unitari ~a,~b tangenti ai lati di ABC in C;
- scomporli nelle loro componenti rispetto alla base−→OA,−−→OB,
−−→OC;
- calcolare cos γ con l’usuale formula dell’angolo.
(ii) Dedurre come in R2 il Teorema dei Cateti e il Teorema dei Seni:
sin a = sin c sinα
sin a
sinα=
sin b
sinβ=
sin c
sin γ
(iii) Considerare dei triangoli sferici con C e angoli α, β, γ fissati e i cui latia, b, c→ 0. Sviluppare le formule appena trovate al primo ordine siginificativo.Cosa si ottiene? Qual e il significato geometrico di quanto trovato?
(iv) Considerate le coordinate geografiche delle citta sotto riportate, calcolarela distanza in linea d’aria tra tra Buenos Aires e Atene e tra la Mecca e Jakarta.Calcolare inoltra la rotta di un areo che parte da Cape Town verso Pechino.
Nota: le rotte geografiche si danno sempre indicando l’angolo in gradi da Nord (in sensoorario rispetto alla normale uscente dalla sfera terreste) che la rotta forma con il meridianoche la interseca.

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 3
Coordinate geografiche (latitudine, longitudine):ϕ λ
Atene 38N 2344′ECape Town 3356′S 1828′E
Buenos Aires 3440′S 5830′WJakarta 608′S 10645′EMecca 2126′N 3949′E
Pechino 3955′S 11626′E
Osservazioni 4.4.7 (Curve minimizzanti, geodetiche e supporto)(i) Nella pratica, spesso non si distingue tra curva minimizzante e geodetica,poiche e possibile mostrare che ogni curva minimizzante su una sottovarieta dif-ferenziabile S e regolare, dunque puo essere riparametrizzata tramite lunghezzad’arco. Quindi si suol dire che “le geodetiche della sfera sono i cerchi mas-simi”, senza precisare la loro parametrizzazione. Ciononostante, la distinzione eimportante quando si cerca una caratterizzazione differenziale delle geodetiche(si veda il Teorema 4.4.10).
(ii) Analogamente, spesso in letteratura non si distingue tra geodetiche e geode-tiche locali. Questo e giustificato dal fatto che ogni geodetica globale e unageodetica locale, e le geodetiche locali sono “prolungamento” di geodetiche glob-ali. Ma le due nozioni sono in generale ben distinte, come insegna l’esempio dellasfera.
Il calcolo differenziale non sarebbe una gran rivoluzione se non permettesse dicalcolare cose che non possono dedursi con l’ausilio della geometria elementare(vedi geodetiche della sfera). Qui di seguito accenniamo a un certo numerodi risultati che ci permettono di dare una caratterizzazione differenziale dellegeodetiche, e di dedurne delle proprieta importanti. La teoria completa dellegeodetiche verra affrontata in un corso piu avanzato di geometria riemanniana.
Il primo passo della teoria e paragonare la lunghezza di una geodetica conla lunghezza di curve che le sono “vicine”:
Definizione 4.4.8 (Variazione di una curva)Sia γ = γ(s) : I = [a, b]→ S una curva su una varieta riemanniana (S, g).Una variazione (Ck) a estremi fissi di γ e un’applicazione F : I×] − δ, δ[→ Sdi classe Ck tale che F (s, 0) = γ(s) e F (a, t) = γ(a), F (b, t) = γ(b) per ogni t;le curve γt(s) = F (s, t) si dicono anche deformazioni di γ (e sono tutte curveomotope a γ in S).Il campo η(s) = ∂F
∂t |t=0 e detto il campo trasverso3 della variazione.Il campo γ88(s) := DS
γ′(s)γ′(s) lungo γ e detto l’accelerazione riemanniana
(o accelerazione intrinseca) di γ su S; notiamo che se S ⊂ Rn si ha γ88 = (γ′′)>
(proiezione ortogonale dell’usuale accelerazione γ′′ su TS).
3Nota: il campo trasverso e in generale solo un campo lungo la curva parametrizzata γ; persemplicita supporremo nel seguito che F |(a,b)×(−δ,δ) sia un embedding, cosı che potremo iden-tificare S0 = F ((a, b)× (−δ, δ)) ad una 2-sottovarieta di S, ed η ad un vero campo vettoriale,restrizione del campo ∂
∂talla curva C = Im(γ).

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 4
Teorema 4.4.9 (Formula della Variazione Prima)Sia γ = γ(s) : I = [a, b] → S una curva regolare a velocita unitaria su (S, g).Sia F = (γt) : I×] − δ, δ[→ S una variazione di γ, e sia η il campo trasversodella variazione. Si consideri la funzione L :] − δ, δ[→ R data da L(t) = `(γt).Allora:
dL
dt
∣∣∣∣t=0
= −∫I
γ88(s) · η(s)ds
Dimostrazione. Indichiamo per semplicita con · il prodotto scalare di S.Sottolineiamo per chiarezza che useremo ′ per la derivata direzionale e per laderivata riemanniana nella direzione del campo ∂
∂s , e che ∂∂s = γ′t(s) lungo γt.
Poiche i campi ∂∂t e ∂
∂s commutano (essendo campi coordinati), per le proprieta
della derivazione riemanniana si ha DS∂∂s
∂∂t −D
S∂∂t
∂∂s = [ ∂∂s ,
∂∂t ] = 0, e dunque:
dL
dt=
∫ b
a
dL
dt
(γ′t(s) · γ′t(s)
) 12 ds =
1
2
∫ b
a
2 ∂∂s·DS ∂
∂t
∂∂s
‖γ′t(s)‖ds
=
∫ b
a
∂∂s·DS ∂
∂s
∂∂t
‖γ′t(s)‖ds =
∫ b
a
(∂∂s· ∂∂t
)′‖γ′t(s)‖
ds−∫ b
a
∂∂t·DS ∂
∂s
∂∂s
‖γ′t(s)‖ds
Poiche η(s) = ∂∂t
∣∣t=0
con η(a) = η(b) = 0, e ‖γ′0‖ = ‖γ′‖ = 1, se ne deduce che
dL
dt
∣∣∣t=0
= [γ′ · η]ba −∫ b
a
γ88(s) · η(s)ds = −∫ b
a
γ88(s) · η(s)ds .2
Corollario 4.4.10 (Geodetica locale ⇔ accelerazione “normale” a S)Sia γ : I → S una curva su una varieta riemanniana, con velocita unitaria.Allora γ e una geodetica locale se e solo se l’accelerazione riemanniana γ88(s) = 0.Nel caso in cui S e una sottovarieta di Rn, cio vuol dire che le geodetiche localisono le curve a velocita costante con accelerazione normale alla sottovarieta4.
Da tale caratterizzazione segue che una geodetica su una superficie S rappresenta la traiettoriaγ di un punto materiale P che si muove su S senza attrito e non soggetto ad alcuna forzaesterna. Infatti in tal caso la reazione vincolare si esplica nella sola direzione normale a S,dunque l’equazione ~F = m~a della dinamica per P , proiettata su TS si sicrive: mγ′′(t) = 0.
Cenno di dimostrazione.Il “solo se” e una conseguenza immediata della formula della variazione prima.Supponiamo infatti per assurdo che γ sia una geodetica, ma γ88(s0) 6= 0.Consideriamo allora un intorno abbastanza piccolo J = [s0 − ε, s0 + ε] di s0
in cui γ′′ non si annulla, e costruiamo una variazione ad estremi fissati di γ|J ,con campo trasverso η parallelo e concorde a γ88(s) in J : e sufficiente pren-dere una funzione ϕ : J → R+, di classe C∞, con ϕ(s0) = 1 e che si annulliagli estremi di J ; quindi, definire in modo arbitrario (purche C∞) delle curvet 7→ γt(s) uscenti da γ(s) con velocita ϕ(s)γ88(s). Poiche γ e minimizzante,deve aversi in particolare per tale variazione L(γt) ≥ `(γ|J), dunque L′(0) = 0.Ma per la formula della variazione prima applicata alla nostra variazione si hanecessariamente L′′(0) = −
∫Jϕ(s)||γ88(s)||ds < 0, contraddizione.
4Notare che ogni curva con accelerazione normale ad S ha necessariamente velocitacostante: infatti v′γ = 2γ′ · γ′′ = 0, essendo γ′(t) ∈ Tγ(t)S.

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 5
La dimostrazione del “se” e un po’ piu complicata: essa discende dallo stu-dio delle coordinate polari su una sottovarieta S qualsiasi, in modo abbastanzasimile al caso dei meridiani della sfera che, parametrizzati a velocita costante(dunque con accelerazione ortogonale alla sfera) minimizzano localmente.2
Il prossimo teorema ci dice che le geodetiche di una sottovarieta sono altret-tanto numerose (almeno localmente) delle rette del piano:
Teorema 4.4.11 (∃ e ! di geodetiche in ogni direzione)(i) Per ogni P ∈ S e v ∈ TPS esiste una e una sola geodetica γv di S conγv(0) = P e γ′v(0) = v, definita su un intervallo [−ε, ε] abbastanza piccolo.(Piu precisamente, esiste ε = ε(P ) > 0 tale che per ogni v ∈ TPS, ||v|| ≤ 1,
la geodetica γv sia definita sull’intervallo [−ε, ε].)
(iii) Inoltre, se S e completa, ogni geodetica e indefinitamente prolungabile (cioee definita sull’intero intervallo reale) in una geodetica locale.
Dimostrazione. Se φ : U ⊂ Rd → S e una carta intorno a P con coordinatelocali (xi) e γ : [a, b] → S e una curva con γ(a) = P e γ′(0) = v, l’equazionedelle geodetiche per γ ≡ (xi(t)) si scrive in coordinate locali come:
γ88 = DSγ′γ′ ≡
Ñx′′1 (t)x′′2 (t)· · ·x′′d (t)
é+ Ω(x′i(t))
Ñx′1(t)x′2(t)· · ·x′d(t)
é= 0
dove Ω(x′i(t)) :=∑i ω
ix′i(t) e combinazione lineare delle matrici ωi che esp-rimono le derivate riemanniane DS
∂∂xi
in coordinate locali, come spiegato nel
Corollario 4.2.4. Il teorema si deduce quindi dai classici teoremi di esistenzae unicita locale di soluzioni dei sistemi di equazioni differenziali ordinarie delsecondo ordine (non lineari) in forma normale, in ipotesi C∞.2
♥ Esercizio 4.4.12 (Geodetiche su superfici rigate)Sia S una superficie differenziabile rigata. Utilizzando la caratterizzazione dif-ferenziale delle geodetiche locali (Teorema 4.4.10), mostrare che:
(i) le generatrici sono geodetiche locali;
(ii) la direttrice non e necessariamente una geodetica locale;
(iii) se S e un cilindro retto, allora le geodetiche locali sono eliche generalizzate(cioe curve con k/τ costante);
(iv) esibire infine una rigata (non cilindrica) la cui direttrice sia una geodetica.
♥ Esercizio 4.4.13 (Geodetiche su superfici di rotazione)Sia S una superficie differenziabile di rotazione, ottenuta ruotando attornoall’asse z la curva α(s) = (0, y(s), z(s)). Si supponga |α′(s)| = 1 e y(s) > 0 ∀s.(i) Sia f(s, ϑ) la parametrizzazione canonica di S, e sia γ(t) = f(s(t), ϑ(t)) unageodetica. Trovare le equazioni differenziali soddisfatte da s(t), ϑ(t).
Suggerimento: imporre le condizioni γ′′ · ∂f∂s
= γ′′ · ∂f∂ϑ
= 0.

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 6
(ii) Verificare che i meridiani di S, parametrizzati a velocita costante, sonogeodetiche locali.
(iii) Sia γ un parallelo di S parametrizzato a velocita costante, e sia P l’inter-sezione di γ con la curva profilo α. Mostrare che γ e una geodetica locale se esolo se la tangente alla curva profilo in P e verticale.
(iv) Sia γ una geodetica, sia ϕ(t) l’angolo tra la curva γ ed il parallelo passanteper γ(t), e sia r(t) la distanza di γ(t) dall’asse di rotazione. Dimostrare larelazione di Clairaut: r(t) cosϕ(t) = costante. Interpretare.
Suggerimento: mostrare, utilizzando il punto 1), che ϑ′(t)y(s(t))2 = cost.

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 7
4.5 Isometrie
Definizione 4.5.1 (Isometrie tra spazi metrici)Un’applicazione f : (X, d) → (X ′, d′) tra spazi metrici si dice un’applicazioneisometrica se f preserva la distanza, i.e.: d′(f(x), f(y))=d(x, y) ∀x, y∈X.Ogni applicazione isometrica e iniettiva (perche?); un’applicazione isometricache sia anche suriettiva si dice un’isometria.L’insieme delle isometrie di una varieta riemanniana X si indica con Is(X).
Definizione 4.5.2 (Isometrie tra sottovarieta)Un’applicazione (almeno C1) F : S → S′ tra sottovarieta si dice un’applicazioneisometrica se dPF e un’isometria di spazi euclidei in ogni punto, i.e. preservala I forma fondamentale:
(dF )P (u) · (dF )P (v) = u · v ∀P ∈ S e ∀u, v ∈ TPS(Questo, come gia visto nel corso di Geometria 1, e equivalente a chiedere che |(dF )P (u)| = |u|∀u ∈ TPS e ∀P ∈ S, o che (dF )P mandi basi ortonormali in basi ortonormali.)
Un’applicazione isometrica tra sottovarieta non e necessariamente iniettiva, nesuriettiva (si pensi a una curva di S′ = R2 parametrizzata da l.a. in modo noniniettivo, oppure al cerchio S′ parametrizzato da l.a.).Un’applicazione isometrica f : S → S′ si dice
• un’ immersione riemanniana, se in piu e iniettiva;
• un embedding riemanniano, se in piu e un embedding;
• un’ isometria, se e iniettiva e suriettiva.
Osservazioni 4.5.3 (Isometrie locali)Esiste una nozione locale di questi morfismi, sia per spazi metrici che per sotto-varieta: un’isometria locale e un’applicazione F la cui restrizione ad ogni intornosufficientemente piccolo e un’isometria. Notare che, data un’applicazione iso-metrica F : S → S′ tra sottovarieta di dimensioni rispettivamente d, d′:
(i) se d ≤ d′ allora F e regolare;
(ii) se d = d′ allora F e un diffeomorfismo locale ed un’isometria locale;
(iii) se d > d′ una tale F non esiste.
(Mostrarlo! Si usa il teorema delle funzioni implicite e della funzione inversa)
In matematica non si dovrebbe mai dare lo stesso nome a cose diverse: poicheuna sottovarieta riemanniana e anche uno spazio metrico, e naturale chiedersise le isometrie di S come spazio metrico siano la stessa cosa delle isometrie diS come varieta riemanniana.
Proposizione 4.5.4 Sia F : S → S′ un’isometria tra sottovarieta riemanniane:allora F e un’isometria tra gli spazi metrici (S, dS) e (S′, dS′), con le loro distanzeintrinseche.Nota: e vero anche il viceversa! Cioe ogni isometria F : (S, dS)→ (S′, dS′ ) come spazi metricie un’isometria riemanniana, ma la dimostrazione e piu difficile; la parte complicata e mostrareche F e differenziabile, si veda Palis, On the differentiability of isometries, R.S. Palis, Proc.American Math. Soc. 1957). Si noti che questo fatto non e semplicissimo nemmeno quandoS = S′ = Rn (andarsi a rivedere la dimostrazione fatta nel corso di Geometria 1!)

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 8
Questo ci assicura che possiamo usare il termine “isometria” per indicare indif-ferentemente le isometrie riemanniane e le isometrie tra spazi metrici.
Dimostrazione. Notiamo che ogni isometria preserva la regolarita delle curve(e un diffeomorfismo!) e la loro lunghezza; infatti
`(F γ) =
∫I
|(F γ)′(t)|dt =
∫I
|dF (γ′(t))|dt =
∫I
|(γ′(t)|dt = `(γ)
poiche dF preserva la norma dei vettori. Quindi per ogni curva γ che unisce P,Qin S esiste una curva γ′ = F γ di ugual lunghezza che unisce i punti F (P ), F (Q)in S′ (e viceversa, poiche F e invertibile). Pertanto dS(P,Q) = dS′(P,Q).2
Vediamo ora alcuni esempi di sottovarieta isometriche e e non-isometriche.Inanzitutto, ogni isometria tra sottovarieta e un diffeomorfismo (in quanto in-vertibile con inversa C1), ma i diffeomorfismi non sono isometrie. Per esempio:
Esempio 4.5.5 (Superficie diffeomorfe ma non isometriche)Un ellissoide E con un asse ai 6= 1 non e isometrico alla sfera unitaria S2.Intuire questo fatto e facile, dimostrarlo un po’ meno. Per mostrare che unacerta applicazione F e un’isometria, basta fare il calcolo di dF ; ma per di-mostrare che non esiste alcuna isometria F : E → S2, serve un invarianteriemanniano: un numero, cioe, associato a ogni superficie S, che risulti ugualeper superfici isometriche. Se un invariante riemanniano ha un valore diverso persfera ed ellissoide non sferico, le due superfici non possono essere isometriche!Una possibilita e il diametro (intrinseco), che e definito come la massima dis-tanza (intrinseca) tra due punti di una sottovarieta S: se E ha un asse aipiu lungo del diametro della sfera, allora diam(E) 6= diam(S2), dunque le duesuperfici non sono isometriche. Purtroppo questo non risolve il problema com-pletamente: non permette di concludere per certi ellissoidi non sferici contenutie tangenti ad S2. E possibile in tal caso considerare un invariante piu sottile:la sistole, che e la lunghezza della piu piccola geodetica chiusa 5 su S. Per lasfera unitaria, la sistole e uguale a 2π (la lunghezza di un cerchio massimo).Un ellissoide strettamente contenuto nella sfera unitaria ha invece una sistoleinferiore, poiche e possibile verificare che le sezioni di E con i piani coordinatisono geodetiche (locali), e se E non e sferico una di esse e certamente piu cortadella corrispondente sezione sferica.Perche le sezioni coordinate di un ellissoide in forma canonica sono geodetiche?Usare il Teorema 4.4.10 oppure il Teorema 4.4.11 del prossimo capitolo.
♥ Esercizio 4.5.6 Mostrare che il toro di rivoluzione Ta,b non e isometrico aTa′,b′ per coppie (a, b), (a′, b′) distinte in R+ × R+.Suggerimento. Per alcune coppie, ricorrere all’invariante “curvatura” (ultimo capitolo).
5Precisamente: la piu piccola geodetica locale chiusa, cf. capitolo successivo
Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 9
I primi esempi “banali” di isometrie tra sottovarieta sono invece quelle ot-tenute per restrizione di congruenze: un’applicazione F : Rn → Rn e detta unacongruenza (o isometria euclidea, o trasformazione rigida) se F (X) = AX + b,con A ∈ O(n). Ricordiamo che queste sono tutte e sole le isometrie di Rn comespazio metrico, ed e abbastanza ovvio che applicando ad S ⊂ Rn un movimentorigido dello spazio in cui giace si ottiene una sottovarieta S′ isometrica ad S:
♥ Esercizio 4.5.7 (Isometrie dello spazio euclideo)(i) Mostrare che se F : Rn → Rn e un’isometria (di spazi metrici), allora F eaffine, e precisamente una congruenza FA(X) = AX + b, A ∈ O(n);(ii) mostrare che il gruppo delle traslazioni Tn e normale in Is(Rn), e Is(Rn) eisomorfo al prodotto semidiretto Tn oO(n).
Proposizione 4.5.8 (Congruenza ⇒ Isometria)Sia F : S → S′ = F (S) la restrizione di una congruenza F (X) = AX + b di Rn.Allora, F e un’isometria tra S e S′.
Dimostrazione. F e biiettiva, in quanto e affine con matrice associata in-vertibile A ∈ O(n). Inoltre, dPF = A in ogni punto. Poiche A e una matriceortogonale, preserva il prodotto scalare, dunque F e un’isometria riemanniana.2
♥ Esercizio 4.5.9 (Isometrie della sfera)Calcolare il gruppo delle isometrie di Sn.
Suggerimento: mostrare, nell’ordine, che:
(i) se FA(X) = AX,con A ∈ O(n), allora F e un’isometria di Sn;
(ii) O(n) agisce transitivamente su Sn;
(iii) data L : TNSn → TNSn isometria lineare, esiste F ∈ Is(Sn) tale che (dF )N = L;
(iv) se F : Sn → Sn e un’isometria tale che F (N) = N e (dF )N = id, allora F = id.
Concludere che ogniisometria della sfera e una congruenza lineare.
Le congruenze sono casi molto particolari di isometrie. Ecco un esempio disuperficie isometrica a R2 non “banalmente”, cioe non tramite una congruenza:
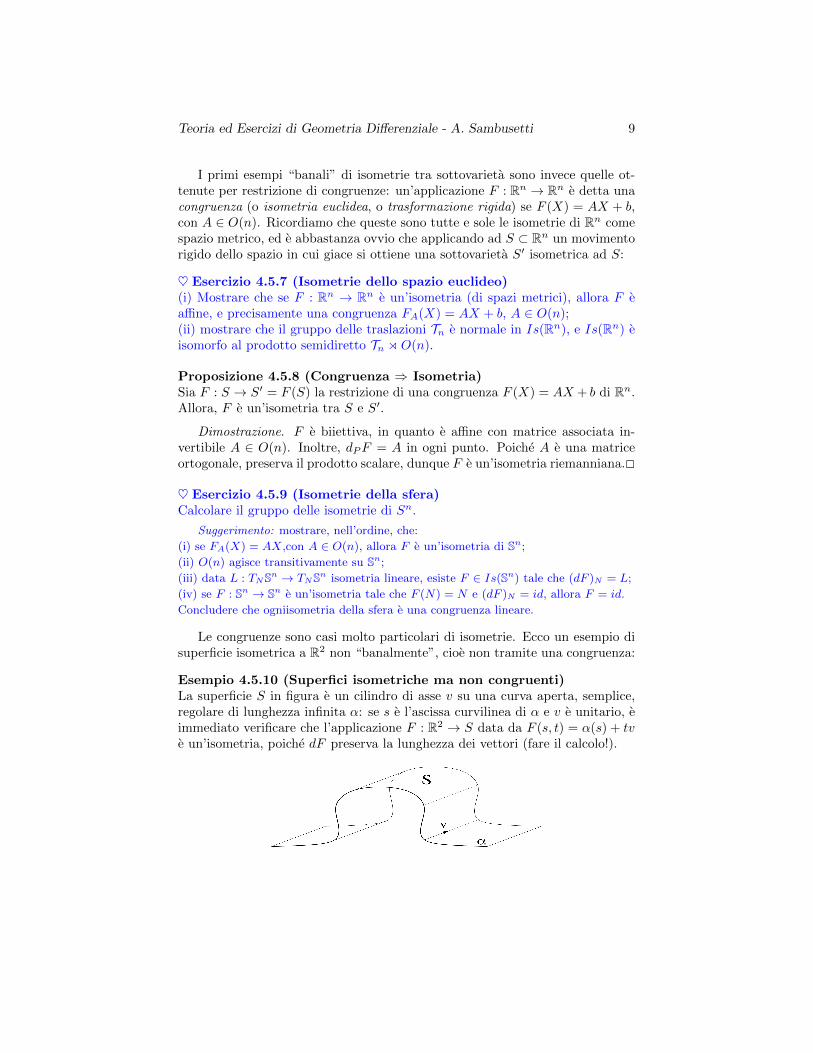
Esempio 4.5.10 (Superfici isometriche ma non congruenti)La superficie S in figura e un cilindro di asse v su una curva aperta, semplice,regolare di lunghezza infinita α: se s e l’ascissa curvilinea di α e v e unitario, eimmediato verificare che l’applicazione F : R2 → S data da F (s, t) = α(s) + tve un’isometria, poiche dF preserva la lunghezza dei vettori (fare il calcolo!).

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 10
La superficie appena vista e un caso particolare di superficie rigata; in generaleuna superficie rigata S che e localmente isometrica al piano si dice sviluppabile.Il seguente esercizio generalizza tale esempio.
♥ Esercizio 4.5.11 (Coni e cilindri sono sviluppabili)(i) Sia Cil(α, v) un cilindro retto su una curva regolare piana α, i.e.: S ha unacarta F (s, t) = α(s) + tv, con v 6= 0, α′(s) 6= 0 e α′(s) ⊥ v per ogni s ∈ R.Costruire un’applicazione isometrica F : R2 → S, dunque ogni cilindro retto elocalmente isometrico a R2. E se il cilindro non fosse retto?
(ii) Sia C(α, V ) un cono su una curva piana semplice α. Mostrare che C(α, V )\Vha due componenti connesse C±(α, V ), ciascuna delle quali e una superficiedifferenziabile (diffeomorfa a cosa?); mostrare inoltre che esiste un’applicazioneisometrica F : R2 → C±(α, V ), dunque ogni cono e localmente isometrico a R2.
Suggerimento:
-fare prima il caso in cui α′ e ortogonale alle generatrici (per esempio, nel caso di un cono
circolare retto di equazione x2 + y2 = c z2), in cui l’isometria e geometricamente evidente;
-quindi mostrare che si puo’ sempre trovare una curva β sul cono, definita nello stesso inter-
vallo di α, tale che C(β, V ) = C(α, V ), ed in piu con β′ ortogonale alle generatrici.
(cp. Do Carmo, Differential geometry of curves and surfaces, p.190; notare che w′(t) 6= 0 ∀t).
Un teorema interessante di geometria differenziale elementare classifica tutte lerigate sviluppabili: le uniche rigate sviluppabili sono (unioni lungo generatricidi) coni, cilindri e superfici tangenti (una superficie tangente e una superficieottenuta prendendo l’unione di tutte le rette affini tangenti ad una curva, menola curva stessa).
Per svolgere l’esercizio precedente, ed anche come strumento teorico, e im-portante capire che dire che S ed S′ sono (localmente) isometriche equivale adire che la matrice di IS (una matrice di funzioni su un aperto di Rn) e ugualealla matrice di IS
′. Ma rispetto a quali coordinate su S, S′ vanno calcolate le
matrici? Cio e spiegato nella proposizione seguente:
Proposizione 4.5.12 (Criterio per isometrie locali)Sia F : (S, g)→ (S′, g′) un’applicazione C1 regolare tra d-varieta riemanniane.F e un’isometria locale se e solo se per ogni carta φ di S si ha [IS ]φ=[IS′ ]
Fφ.(F φ e una carta per S′ attorno ad ogni punto F (φ(P )), poiche F e regolare.)Ne segue che: se S ed S′ sono isometriche, allora esistono atlantiA = (Ui, φi) eA′ = (U ′i , φ′i), rispettivamente per S ed S′, tali che [IS ]φi = [IS
′]φ′i per ogni i;
viceversa se S ed S′ ammettono coordinate (globali) φ, φ′ tali che [IS ]φ = [IS′]φ′
allora S ed S′ sono isometriche.
Dimostrazione. Se [IS ]φ = (gij) =Ä∂φ∂xi· ∂φ∂xj
ä, si ha [IS
′]Fφ = (g′ij) con
g′ij(P ) = g′Å∂(F φ)
∂xi(P ),
∂(F φ)
∂xj(P )
ã= g
Å(dF )P
(∂φ
∂xi
), (dF )P
Å∂φ
∂xj
ããdunque g′ij(P ) = gij(P ) se e solo se (dF )P e un’isometria di spazi euclidei ∀P .
L’ultima affermazione segue definendo il diffeomorfismo F = φ′ φ−1 : S → S′,che e un’isometria in quanto [IS
′]Fφ = [IS
′]φ′
= [IS ]φ per ipotesi.2

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 11
E chiara allora l’importanza di saper calcolare la prima forma fondamentalerispetto a coordinate locali diverse. Un lemma utile per paragonare la matricedella prima forma fondamentale in coordinate diverse e il seguente:
Lemma 4.5.13 (Prima forma su carte diverse)Siano φ, φ′ due carte per S con coordinate rispettive (xi) e (x′i).(i) La matrice del cambio di coordinate su TPS da B = ∂
∂xi a B′ = ∂
∂x′i e:
[1]φ′
φ = d(φ−1 φ′)(ii) Le matrici di I di S rispetto alle due carte φ, φ′ soddisfano:
[I]φ′
= t[1]φ′
φ [I]φ [1]φ′
φ
Nota: nei calcoli, una volta che siano note le carte φ, φ′ e le rispettive coordinate (xi), (x′i)
viene spesso comodo indicare la matrice di I nella carta φ con [I](xi), e la matrice del cambio
di coordinate da B a B′ con [1]φ′
φoppure [1]
(x′i)(xi)
.
Dimostrazione. Per (i) basta aver chiaro che se v ∈ TpS, allora le coordinatedi v nella base B sono date dal vettore (dPφ
−1)(v) ∈ Rd (e analogamente lecoordinate su B′). Poiche (dPφ
−1)(v) =(dP (φ−1 φ′)
) ((dPφ
′−1)(v))
segueche la matrice dP (φ−1 φ′) permette di passare dalle coordinate di v in B′ alle
coordinate di v in B, dunque e proprio la matrice [1]φ′
φ . Per (ii) basta ricordareche se g e una forma bilineare simmetrica su uno spazio vettoriale V , con basi Be B′, e se [1]B
′
B indica la matrice del cambio di coordinate dalla base B′ alla base
B, allora le matrici di g rispetto alle due basi soddisfano [g]B′
= t[1]B′
B [g]B[1]B′
B .2
Provare a utilizzare il lemma per risolvere il prossimo esercizio, un esempiodi due superfici isometriche che paiono molto differenti.
Esempio 4.5.14 (Trasformazione isometrica di elicoide in catenoide)La superficie Cat, ottenuta ruotando la curva catenaria α(t) = (cosh t, 0, t) (con-tenuta nel piano Oxz) attorno all’asse z e detta catenoide. La figura mostracome, tagliando il catenoide lungo un meridiano, sembra sia possibile trasfor-marlo in una porzione di elicoide standard El senza “deformarlo”, cioe mante-nendo invariate le distanze intrinseche tra punti sulla superficie:
Notare che, nella figura, i meridiani di Cat vengono trasformati nei raggi di El,e che i paralleli di Cat vengono trasformati nelle eliche di El.

Teoria ed Esercizi di Geometria Differenziale - A. Sambusetti 12
(i) Parametrizzare Cat con coordinate (ϑ, ρ) in modo che le curve ϑ = cost sianoi meridiani e le curve ρ = cost siano i paralleli;(ii) parametrizzare El con coordinate (s, r) in modo che le curve s = cost sianoi raggi dell’elicoide, e le curve r = cost siano le eliche (o la retta verticale)direttrici di El;(iii) riparametrizzare, eventualmente, in modo che la velocita dei raggi e delleeliche di El sia uguale alla velocita dei meridiani e dei paralleli di Cat;(iv) La figura suggerisce un’applicazione isometrica F : El → Cat ottenutainviando raggi in meridiani ed eliche in paralleli, rispettando le lunghezze lungole due famiglie di curve ortogonali (cioe previa la riparametrizzazione (iii)).Verificare che l’applicazione cosı definita e isometrica.
Un metodo equivalente, analitico invece che geometrico, e di scrivere le duematrici [IEl]s,r, [ICat]ϑ,ρ e cercare un cambio di coordinate
r = r(ϑ, ρ) , s = s(ϑ, ρ) (1)
su El, in modo che la I forma dell’elicoide nelle nuove coordinate ϑ, ρ dia
[IEl]ϑ,ρ = [ICat]ϑ,ρ (2)
Imporre questa uguaglianza tra matrici fornisce delle equazioni differenziali sullefunzioni incognite r(ϑ, ρ), s(ϑ, ρ), che si puo tentare di risolvere. Provarci, perverificare come il metodo geometrico sia di gran lunga superiore a procedereanaliticamente “alla cieca”.
Soluzione.Elicoide e Catenoide sono parametrizzati secondo quanto richiesto in (i) e (ii) come
El : φ(s, r) = (r cos s, r sin s, s)
Cat : ψ(ϑ, ρ) = (cosh ρ cosϑ, cosh ρ sinϑ, ρ)
In tal modo i raggi dell’elicoide sono parametrizzati tramite l.a., mentre le sue eliche r = costhanno velocita
√1 + r2; meridiani e paralleli del catenoide hanno invece ugual velocita cosh ρ.
Se si procede “alla cieca”, cercando una trasformazione del tipo (1), il Lemma 4.5.13 fornisce:
[IEl
]ϑ,ρ
=t[1]ϑ,ρr,s [I
El]r,s
[1]ϑ,ρr,s =
Ärϑ sϑrρ sρ
äÄ1 00 1 + r2
äÄrϑ rρsϑ sρ
äed imporre la condizione (2) significa imporre(
r2ϑ + s2ϑ(1 + r2) rϑrρ + sϑsρ(1 + r2)rϑrρ + sϑsρ(1 + r2) r2ρ + s2ρ(1 + r2)
)=
(cosh2 ρ 0
0 cosh2 ρ
)ovvero il sistema di equazioni alle derivate parziali, accoppiato, nelle funzioni r(ϑ, ρ), s(ϑ, ρ):®
r2ϑ + s2ϑ(1 + r2) = cosh2 ρr2ρ + s2ρ(1 + r2) = cosh2 ρ
rϑrρ + sϑsρ(1 + r2) = 0
inestricabile. Se invece si ricorda il suggerimento (iv), deduciamo che stiamo cercando delle funzionir = r(ρ) ed s = s(ϑ), ed imporre che le lunghezze (o velocita) lungo le due famiglie di curve sianouguali semplifica il sistema in
rρ2 = cosh2 ρ
sϑ2(1 + r2) = cosh2 ρ
la cui soluzione a questo punto e semplice: r(ϑ, ρ) = sinh ρ ed s(ϑ, ρ) = ϑ.
E ora immediato verificare (come visto nella Proposizione 4.5.12) che l’applicazione F che associaal punto P ∈ El di coordinate (r = sinh ρ, s) il punto F (P ) ∈ Cat di coordinate (ρ = settsinhr, ϑ)e un’isometria locale.2
Un altro modo di procedere (assai piu comodo da ricordare e usato da tutti)per paragonare la prima forma fondamentale su carte diverse e utilizzare illinguaggio delle forme differenziali, come vedremo piu in la.

![Esercizi di istituzioni di analisi superiore - mat.uniroma1.it · Notare che le funzioni monotone su [a;b] hanno solo disconti- ... 3.Provare che f gnon e a variazione limitata e](https://static.fdocument.org/doc/165x107/5c713c5e09d3f2b4528be83c/esercizi-di-istituzioni-di-analisi-superiore-mat-notare-che-le-funzioni-monotone.jpg)




