4 Dinamica de Actuadores
12
4. Din´ amica de actuadores Dr. Mart´ ın Velasco Villa Secci´ on de Mecatr´ onica Abril de 2015
description
Dinámica de actuadores
Transcript of 4 Dinamica de Actuadores
-
4. Dinamica de actuadores
Dr. Martn Velasco Villa
Seccion de Mecatronica
Abril de 2015
-
Dinamica de motores de CD en robots rgidos de magnetopermanente
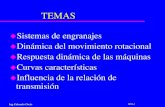
Un motor de CD controlado por armadura puede representarse electricamente como sedescribe en la figura.
-
Circuito electrico de la corriente de armadura
donde
V : Voltaje de armadura (Rotor) m : Posicion del rotor (Rad)L : Inductancia de (Henrios) m : Torque generado (N-M)R : Resistencia de armadura l : Torque de carga (M-M)Vb : Fuerza contra electromotriz (Volts) : Flujo magnetico debido al estatoria : Corriente de armadura (Webers)
-
La corriente de armadura produce,
Ldiadt
+ Ria = V Vb. (1)
Si el estator produce un flujo magnetico radial y la corriente en el rotor es ia, lamagnitud del torque generado resulta
m = k1ia (F = i ) (2)Como se consideran motores de CD de magneto permanente es posible considerar unflujo constante, entonces,
m = kmia (3)
donde km = k1 es la constante de torque (N-M/amp).Cuando un conductor se mueve en un campo magnetico, un voltaje Vb es generado ensus terminales, el cual es proporcional a la velocidad del conductor en el campo. Estevoltaje es llamado Fuerza contraelectromotriz, el cual resulta,
Vb = k2wm (4)
con wm (rad/seg ) siendo la velocidad angular del rotor y k2 una constante deproporcionalidad.
-
Considerando constante,
Vb = k2wm = kbwm = kbdmdt
(5)
donde kb es la constante de fuerza electromotriz.
I Puede probarse que km y kb son iguales.
Cuando el motor es detenido, el torque generado por el rotor cuando se aplica unvoltaje Vr se denota 0.Considerando,
Ldiadt
+ Ria = V Vb y m = kmiacon Vb = 0 y
diadt = 0 se obtiene (una condicion equivalente es L 0),
Vr = Ria =R0km
(6)
Por lo tanto, la constante de torque puede obtenerse como,
km =R0Vr
. (7)
-
Modelo de articulaciones independientes
I Estructura MotorEngranesEslabones. Motor de DC en serie con un tren deengranes con una relacion de reduccion r .
Ja : Inercia del actuador (motor) Jl : Inercia de la carga (eslabones)Jg : Inercia de los engranes Bm : Coeficiente de friccion del motorm : Angulo del rotor s : Angulo de salidam : Torque del motor s : Torque de salidaJm = Ja + Jg m = rs
-
Con respecto a la figura, es facil ver que,
JLd2sdt2
= l
y del lado del motor,
Jmd2mdt2
+Bmdmdt
= m lr
= kmia lr
. (8)
donde lr corresponde al par de carga reflejado antes del tren de engranes.Considerando (1), (5) y (8) se obtiene,
L diadt + Ria = V kb dmdtJm
d2mdt2
+Bmdmdt = kmia lr .
(9)
Dado que la constante de tiempo electrica LR , es mucho mas pequena que la
constante de tiempo mecanica JmBm , la inductancia de la armadura L puede ser
despreciada (L 0), entonces,
Ria = V kb dmdt
. (10)
-
Por lo tanto,
Jm m +Bm m = km
(V
R kb
Rm
) l
r
esto es,
Jm m +
(Bm +
kmkbR
)m =
kmR
V lr
. (11)
Obteniendose equivalentemente una representacion de la forma,
J +B = u (t) d (t) (12)donde B es la constante de amortiguamiento, u representa la senal de control y d sonperturbaciones de entrada.
-
El desarrollo anterior puede utilizarse para reformular la dinamica de un manipulador alincorporar el efecto de los motores de CD actuando en las articulaciones.Para cada articulacion el modelo motor-engranes-eslabon produce
Jmk mk +Bk mk =kmkRk
Vk krk
, k = 1, . . . , n (13)
donde
Bk = Bmk +kbk kmkRk
.
-
Multiplicando (13) por la relacion de engranes rk y considerando que
mk = rkqk (14)
se obtiene,
r2k Jmk qk + r2kBk qk = rk
kmkRk
Vk k . (15)
La dinamica del manipulador obtenida anteriormente esta dada por,
n
j=1
dkj (q) qj +n
i=1
n
j=1
Cijk (q) qi qj + gk = k . (16)
Sustituyendo (15) en (16) se obtiene,
r2k Jmk qk +n
j=1
dkj qj +n
i=1
n
j=1
Cijk qi qj + r2kBk qk + gk = rk
kmkRk
Vk , k = 1, . . . , n (17)
-
En forma matricial,M (q) q + C (q, q) q +Bq + g (q) = u (18)
donde
M (q) = D (q) + J, J = diag{r2i Jmi
}B = diag
{r2i Bi
}, Bi = Bmi +
kbi kmiRi
Las matrices C (q, q), g (q) Estan definidas en el modelo original del manipulador.El vector de entrada de u tiene elementos,
uk = rkkmkRk
Vk , k = 1, . . . , n. (19)
I uk tiene unidades de torque.
-
Considerando la matriz de coeficientes de friccion B 6= 0 se obtiene el modeloequivalente,
M (q) q + C (q, q) q +Bq + g (q) = u (20)
que puede analizarse de manera similar al modelo original que no considera ladinamica de los motores ya que M (q) sigue siendo una matriz simetrica, definidapositiva y la matriz M (q) 2C (q, q) resulta tambien un matriz antisimetrica.Las estrategias de control que se presentaran a continuacion pueden aplicarseindistintamente a manipuladores descritos con respecto a M (q) o D (q), esto es,
D (q) q + C (q, q) q +Bq + g (q) = (21)
M (q) q + C (q, q) q +Bq + g (q) = u (22)