4 Control System Performance
19
Introduction to Control Systems IV. Απόδοση Συστημάτων Ελέγχου (Control System Performance)
-
Upload
nehakarunya -
Category
Documents
-
view
218 -
download
2
description
4 Control System Performance
Transcript of 4 Control System Performance
Introduction to Control Systems
IV. Απόδοση Συστημάτων Ελέγχου (Control System Performance)

• Απόκριση μεταβατικής κατάστασης [transient response] • Απόκριση μόνιμης κατάστασης [steady-state response] • Ποια είναι τα χαρακτηριστικά της μεταβατικής κατάστασης;
Απόκριση και οι Θέσεις των Πόλων (LTI)
( )( )( )
n sH sd s
=
Μηδενικά: Ρίζες της n(s)=0 Πόλοι: Ρίζες της d(s)=0
Κρουστική απόκριση Φυσική απόκριση [natural response]
( ) ( )LTh t H s→ Συνάρτηση μεταφοράς
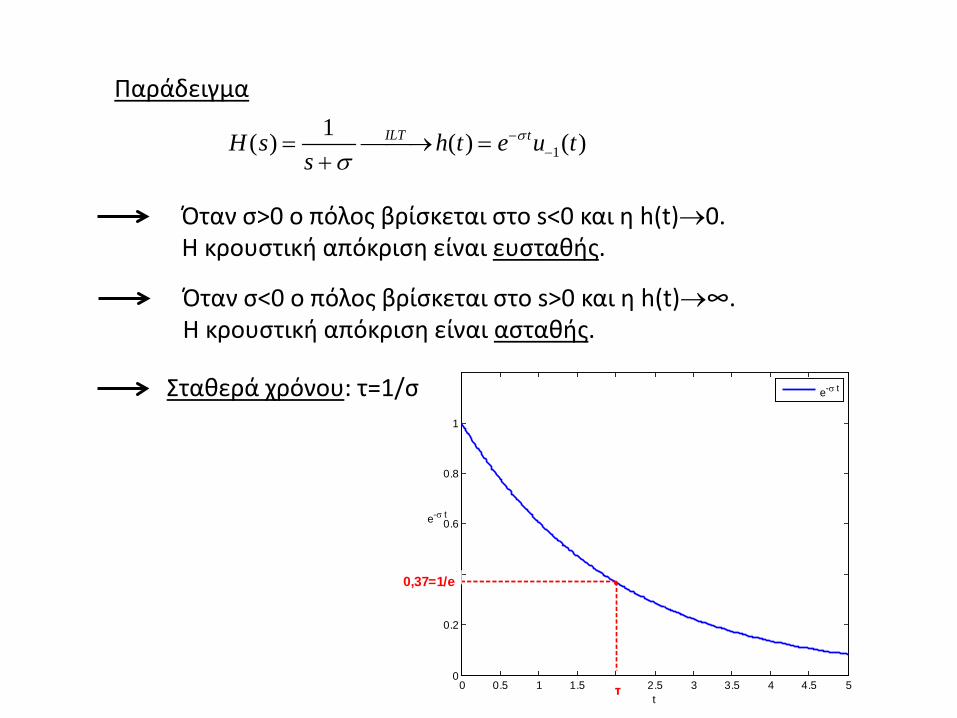
Παράδειγμα
11( ) ( ) ( )ILT tH s h t e u t
sσ
σ−
−= → =+
Όταν σ>0 ο πόλος βρίσκεται στο s<0 και η h(t)→0. Η κρουστική απόκριση είναι ευσταθής.
Όταν σ<0 ο πόλος βρίσκεται στο s>0 και η h(t)→∞. Η κρουστική απόκριση είναι ασταθής.
Σταθερά χρόνου: τ=1/σ
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
t
e-σ t
e-σ t
0,37=1/e
τ
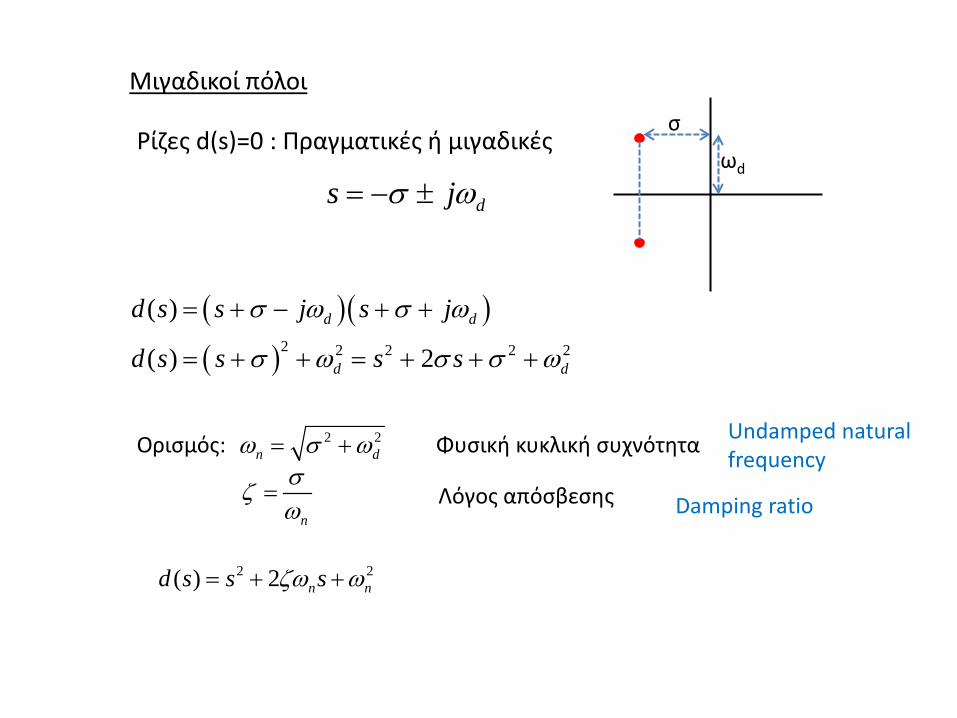
Μιγαδικοί πόλοι
Ρίζες d(s)=0 : Πραγματικές ή μιγαδικές
ds jσ ω= − ±
( )( )( )2 2 2 2 2
( )
( ) 2d d
d d
d s s j s j
d s s s s
σ ω σ ω
σ ω σ σ ω
= + − + +
= + + = + + +
Ορισμός: 2 2n dω σ ω= + Φυσική κυκλική συχνότητα
n
σζω
= Λόγος απόσβεσης
2 2( ) 2 n nd s s sζω ω= + +
σ ωd
Undamped natural frequency
Damping ratio
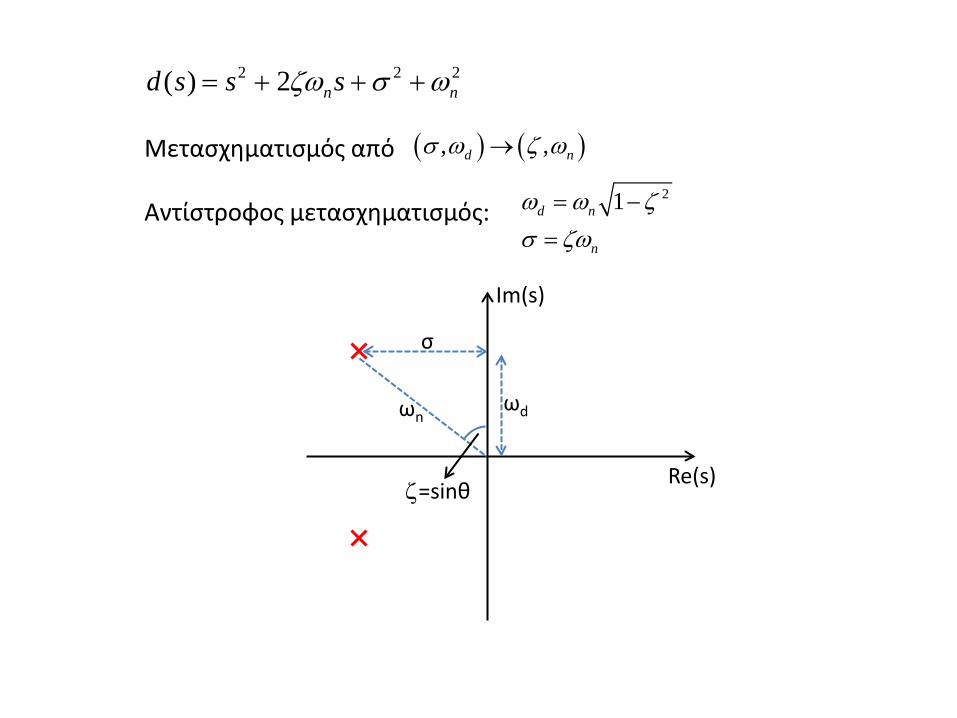
Μετασχηματισμός από Αντίστροφος μετασχηματισμός:
( ) ( ), ,d nσ ω ζ ω→
21d n
n
ω ω ζσ ζω
= −
=
σ
ωd ωn
ζ=sinθ Re(s)
Im(s)
2 2 2( ) 2 n nd s s sζω σ ω= + + +

2
2 2( )2
n
n n
H ss s
ωζω ω
=+ +
Μοναδιαία βηματική απόκριση:
( ) 12( ) sin ( )
1tn
dh t e t u tσω ωζ
−−=
−
( ) 12
21
1( ) 1 sin ( )1
1tan
tdc t e t u t
ό
σ ω θζ
ζπου θ
ζ
−−
−
= − +−
− =
Κρουστική απόκριση:

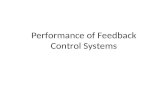
Παράδειγμα 2
2 1( )2 5
sH ss s
+=
+ +
2 5 5 2.24sec
12 2 0.447
n n
nn
radω ω
ζω ζω
= ⇒ = =
= ⇒ = =
Για να βρούμε την h(t):
( ) ( ) ( )( )
2 2 22 2 2 2
2 1 2 1 1 2( )2 5 1 2 1 2 1 2
2 1 1 2 22 , 0.5
s s sH s a bs s s s s
s a s b as a ba b
+ + += = = ⋅ + ⋅
+ + + + + + + +
+ = + + = + +
⇒ = = −
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
t
h(t)( ) 1( ) 2 cos(2 ) 0.5 sin 2 ( )t th t e t e t u t− −− ⇒ = −

Περίληψη •Απόκριση vs. θέση πόλων
2 21 1
( )( )( ) 2
k k
M Ni k k
i ki k n n
ί ί όό
A B s Cn sH sd s s s s
πραγµατικο µιγαδικο π λοιπ λοι
σ ζ ω ω= =
+= = +
+ + +∑ ∑
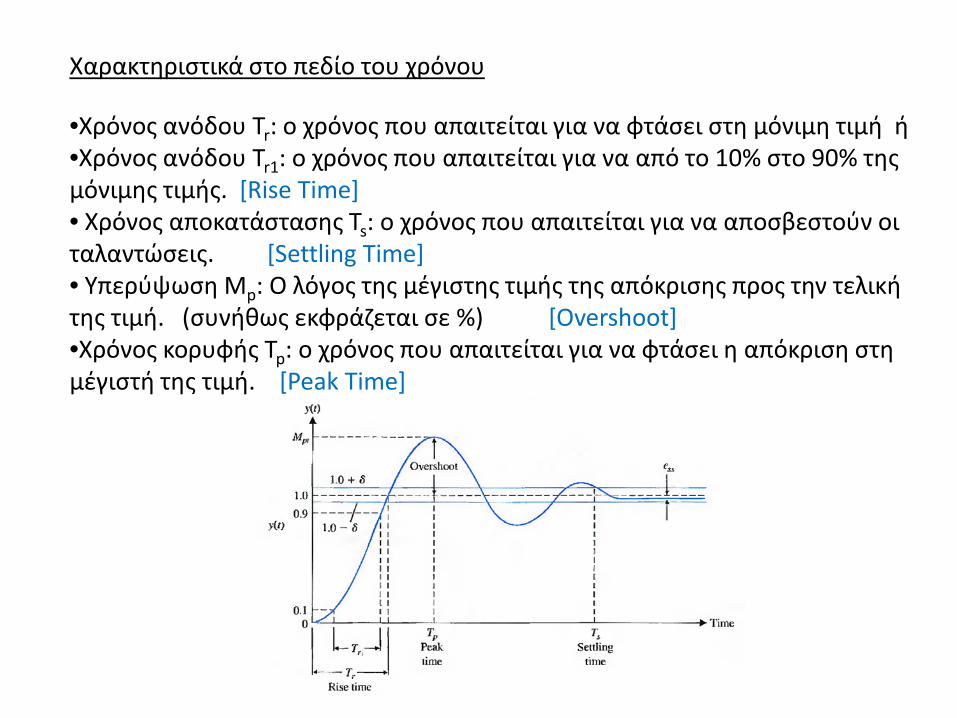
Χαρακτηριστικά στο πεδίο του χρόνου
•Χρόνος ανόδου Tr: ο χρόνος που απαιτείται για να φτάσει στη μόνιμη τιμή ή •Χρόνος ανόδου Tr1: ο χρόνος που απαιτείται για να από το 10% στο 90% της μόνιμης τιμής. [Rise Time] • Χρόνος αποκατάστασης Ts: ο χρόνος που απαιτείται για να αποσβεστούν οι ταλαντώσεις. [Settling Time] • Υπερύψωση Mp: Ο λόγος της μέγιστης τιμής της απόκρισης προς την τελική της τιμή. (συνήθως εκφράζεται σε %) [Overshoot] •Χρόνος κορυφής Tp: ο χρόνος που απαιτείται για να φτάσει η απόκριση στη μέγιστή της τιμή. [Peak Time]
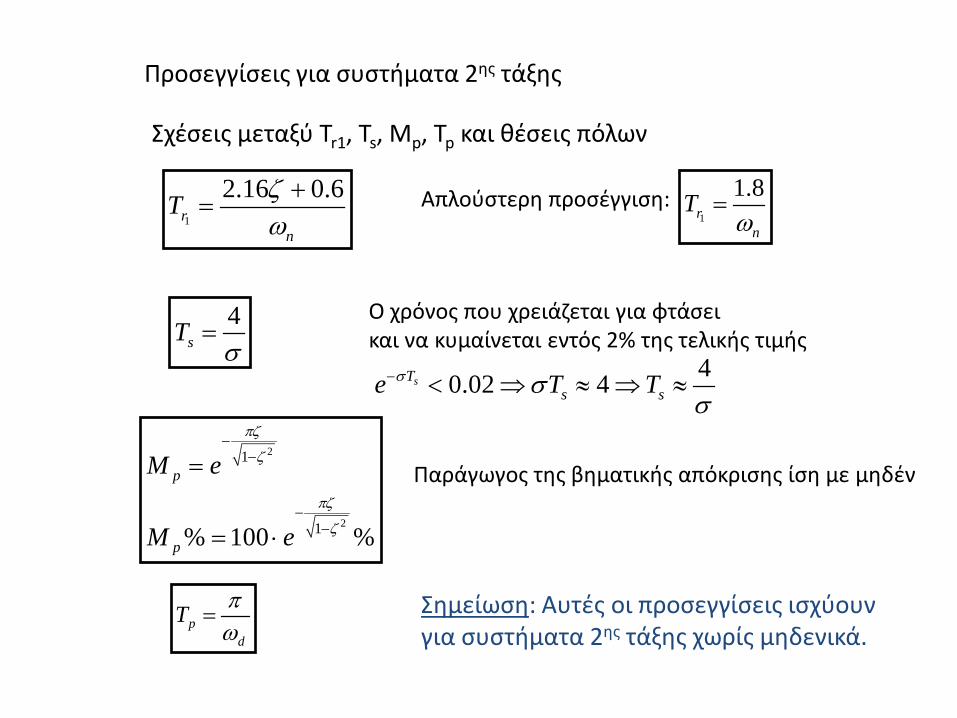
Προσεγγίσεις για συστήματα 2ης τάξης
Σχέσεις μεταξύ Tr1, Ts, Mp, Tp και θέσεις πόλων
1
2.16 0.6r
n
T ζω+
= Απλούστερη προσέγγιση: 1
1.8r
n
Tω
=
4sT
σ=
Ο χρόνος που χρειάζεται για φτάσει και να κυμαίνεται εντός 2% της τελικής τιμής
40.02 4sTs se T Tσ σ
σ− < ⇒ ≈ ⇒ ≈
2
2
1
1% 100 %
p
p
M e
M e
πζ
ζ
πζ
ζ
−−
−−
=
= ⋅
Παράγωγος της βηματικής απόκρισης ίση με μηδέν
pd
T πω
= Σημείωση: Αυτές οι προσεγγίσεις ισχύουν για συστήματα 2ης τάξης χωρίς μηδενικά.

Παράδειγμα
Βρείτε την επιτρεπτή περιοχή στο επίπεδο s για τους πόλους της συνάρτησης μεταφοράς έτσι ώστε να ικανοποιούνται τα ακόλουθα χαρακτηριστικά:
) 0.6secri T ≤
( )
21
1
) 10% : 0.1
0.6 sin 37
2.16 0.6) 0.6sec : 0.6
2.16 0.6 3.160.6
4) 2sec : 2 2
p
rn
n
s
i M e
ii T
iii T
πζ
ζ
ζ θ ζ
ζω
ζω
σσ
−−
−
≤ ≤
⇒ ≥ = =
+≤ ≤
+⇒ ≥ =
≤ ≤ ⇒ ≥
( ) 10%pii M ≤ ( ) 2secsiii T ≤

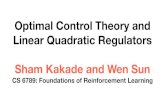
Επίδραση μηδενικών και επιπλέον πόλων • Ένα επιπλέον μηδενικό στο αριστερό ημιεπίπεδο που είναι σχετικά κοντά σε πόλο, αυξάνει την υπερύψωση.
• Ένα επιπλέον μηδενικό στο δεξιό ημιεπίπεδο μειώνει την υπερύψωση και μπορεί να κάνει τη βηματική απόκριση να ξεκινάει αντίστροφα.
Σύστημα μη ελάχιστης φάσης [Non-minimum phase system]
• Ένας επιπλέον πόλος στο αριστερό ημιεπίπεδο που είναι σχετικά κοντά στο πραγματικό μέρος των (μιγαδικών) πόλων, αυξάνει σημαντικά το χρόνο ανόδου.
t
y(t)
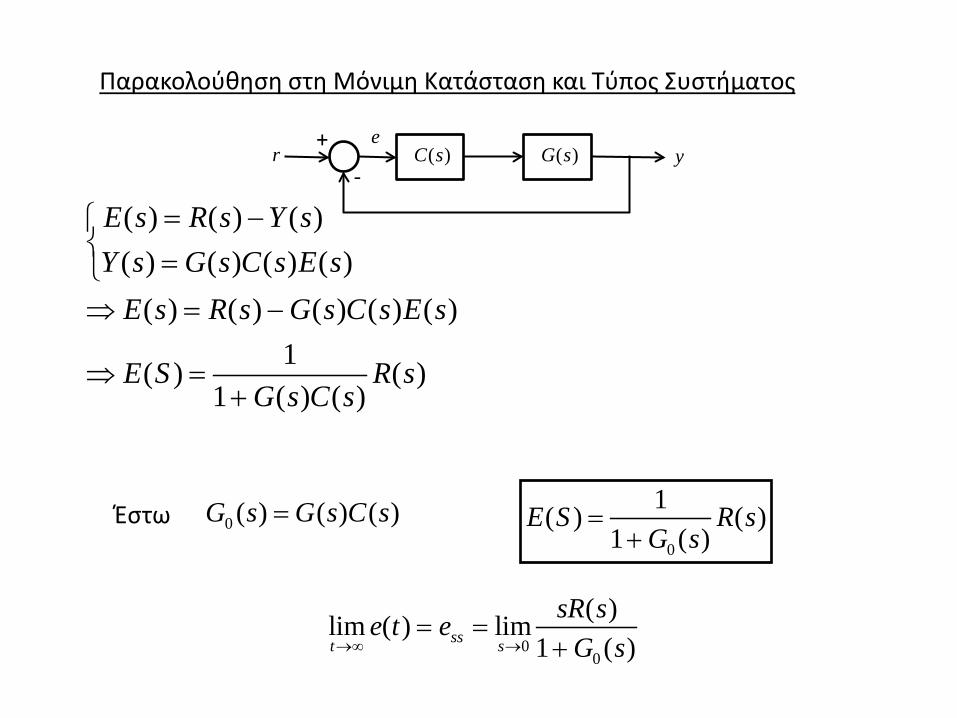
Παρακολούθηση στη Μόνιμη Κατάσταση και Τύπος Συστήματος
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )1( ) ( )
1 ( ) ( )
E s R s Y sY s G s C s E s
E s R s G s C s E s
E S R sG s C s
= − =⇒ = −
⇒ =+
r y+
-
e( )C s ( )G s
0
1( ) ( )1 ( )
E S R sG s
=+
00
( )lim ( ) lim1 ( )sst s
sR se t eG s→∞ →
= =+
0 ( ) ( ) ( )G s G s C s=Έστω
1) Βηματική είσοδος [step input]
2) Είσοδος ράμπας [ramp input]
3) Παραβολική είσοδος [acceleration input]

1) Βηματική είσοδος
1( ) ( )
( )
r t Au tAR ss
−=
=
( )( ) ( )( )( ) ( )
00 0
1 20
1 2
( )lim1 ( ) 1 (0)
...( )
...
ss s
MN
Q
sR s AeG s G
K s z s z s zG s
s s p s p s p
→= =
+ +
+ + +=
+ + +
N=0: Τύπος συστήματος 0 N=1: Τύπος συστήματος 1 N=2: Τύπος συστήματος 2 …
01 (0) 0ssN ό G eν τ τεΑ ≥ = ∞⇒ →
A: πλάτος της βηματικής συνάρτησης

( ) ( )( ) ( ) ( ) ( )
1
00 1 1
1
01 1
00
...lim
1 (0) ... ...
...lim
... ...
1 0
0 (0) :1 (0)
NQ
ss NsQ M
NQ
ss NsQ M
ss
ss
As s p s pAeG s s p s p K s z s z
s Ap pe
s p p Kz z
N eAN e G ά ά έG
ταθερ σϕ λµατος θ σης
→
→
+ += =
+ + + + + +
⇒ =+
≥ ⇒ =
= ⇒ = Σ+
[Position Error Constant]

2) Είσοδος ράμπας 1
2
( ) ( )
( )
r t Atu tAR ss
−=
=
( )( )( ) ( )( )( ) ( )
0 0 00 0 0
1 2
1 2
( )lim lim lim1 ( ) 1 ( ) ( )
......
2 0
1
0
ss s s s
NQ
ssM
ss
ssv
ss
sR s A AeG s s G s sG s
As s p s p s pe
Ks s z s z s z
N eAN e
KN e
→ → →= = =
+ +
+ + +⇒ =
+ + +
≥ ⇒ =
= ⇒ =
= ⇒ = ∞
1 2
1 2
......
Mv
Q
Kz z zK ά ά ύp p p
ταθερ σϕ λµατος ταχ τητας= Σ [Velocity Error Constant]
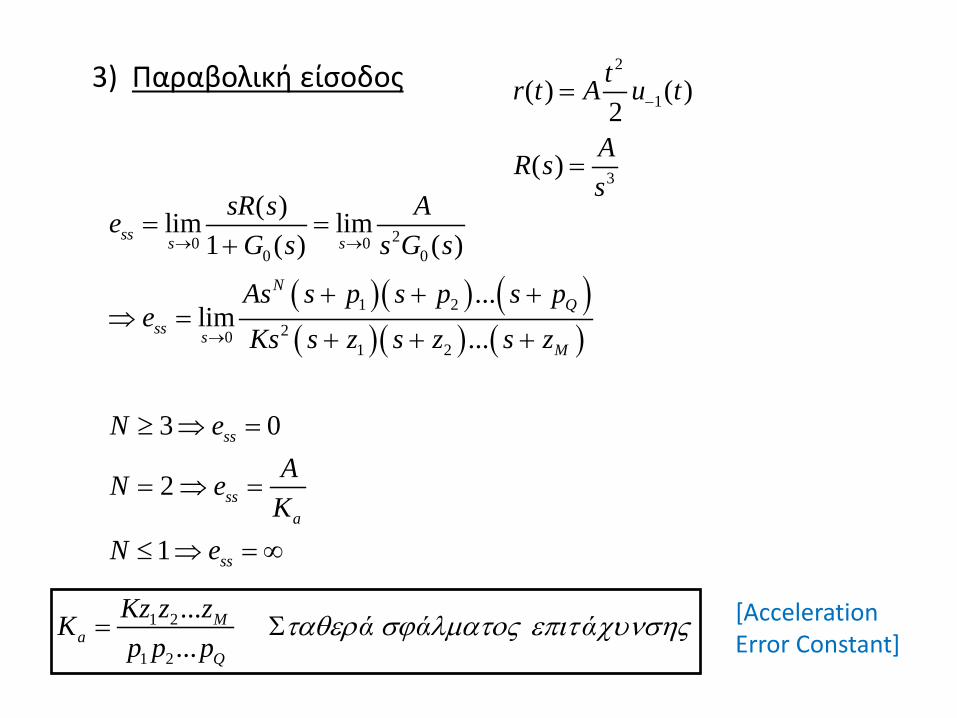
3) Παραβολική είσοδος 2
1
3
( ) ( )2
( )
tr t A u t
AR ss
−=
=
( )( ) ( )( )( ) ( )
20 00 0
1 220
1 2
( )lim lim1 ( ) ( )
...lim
...
3 0
2
1
ss s s
NQ
ss sM
ss
ssa
ss
sR s AeG s s G s
As s p s p s pe
Ks s z s z s z
N eAN e
KN e
→ →
→
= =+
+ + +⇒ =
+ + +
≥ ⇒ =
= ⇒ =
≤ ⇒ = ∞
1 2
1 2
......
Ma
Q
Kz z zK ά ά άp p p
ταθερ σϕ λµατος επιτ χυνσης= Σ [Acceleration Error Constant]
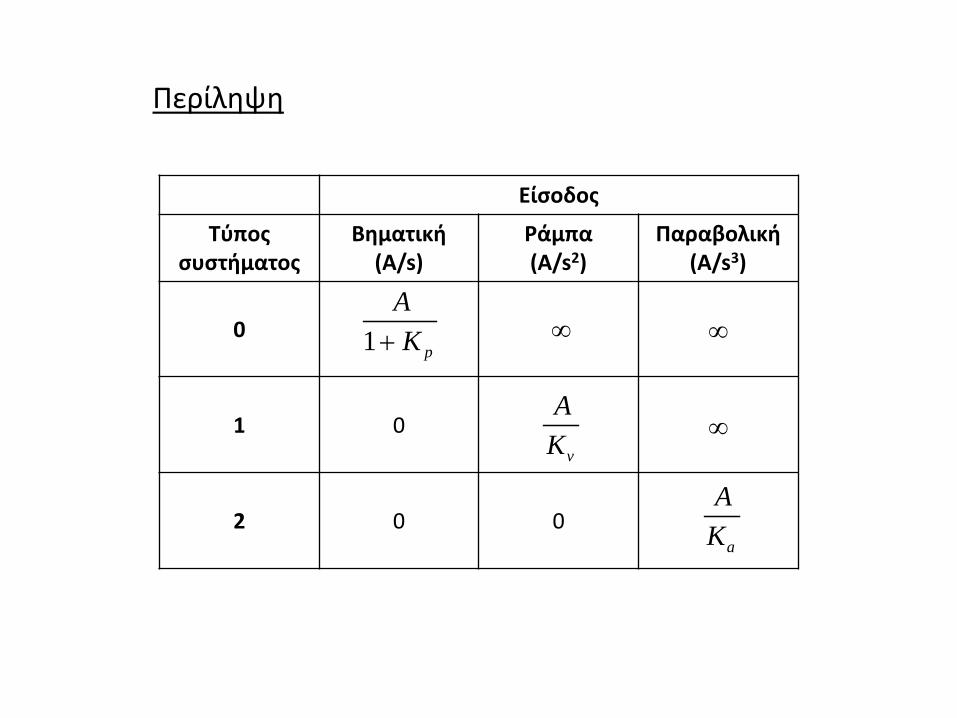
Είσοδος
Τύπος συστήματος
Βηματική (Α/s)
Ράμπα (Α/s2)
Παραβολική (A/s3)
0
1 0
2 0
0
1 p
AK+ ∞
v
AK
a
AK
∞
∞
Περίληψη