4. Bildentrauschen: Filtertechniken FILTER Verrauschtes ... · 4. Bildentrauschen: Filtertechniken...
12
4. Bildentrauschen: Filtertechniken → FILTER → Originalbild B Verrauschtes Bild B F = Filter (B)+ η FILTER: Scanner, digitale Cameras, Internetübertragung ... η: additives Rauschen = unvorhersehbare Filterfehler Ziel: Umkehrung der Filtertransformation und Rauschunterdrückung 4. Bildentrauschen: Filtertechniken für additives Rauschen → FILTER → Verrauschtes Bild Entrauschtes Bild B F = B + η ≈ B FILTER: Transformation zur Rauschunterdrückung 4.1 Datenunabhängiges Rauschen: Gaußsches weißes Rauschen η ∼ N(0,σ 2 ) Originalbild σ 2 = 3 σ 2 = 10 σ 2 = 13 4.1 Datenunabhängiges Rauschen: Salt-und-Pepper, Schnee Originalbild p = 0.1 p = 0.3 p = 0.5 p := Anzahl von fehlerbehafteten Pixeln Anzahl von Pixeln
-
Upload
trinhkhuong -
Category
Documents
-
view
214 -
download
0
Transcript of 4. Bildentrauschen: Filtertechniken FILTER Verrauschtes ... · 4. Bildentrauschen: Filtertechniken...
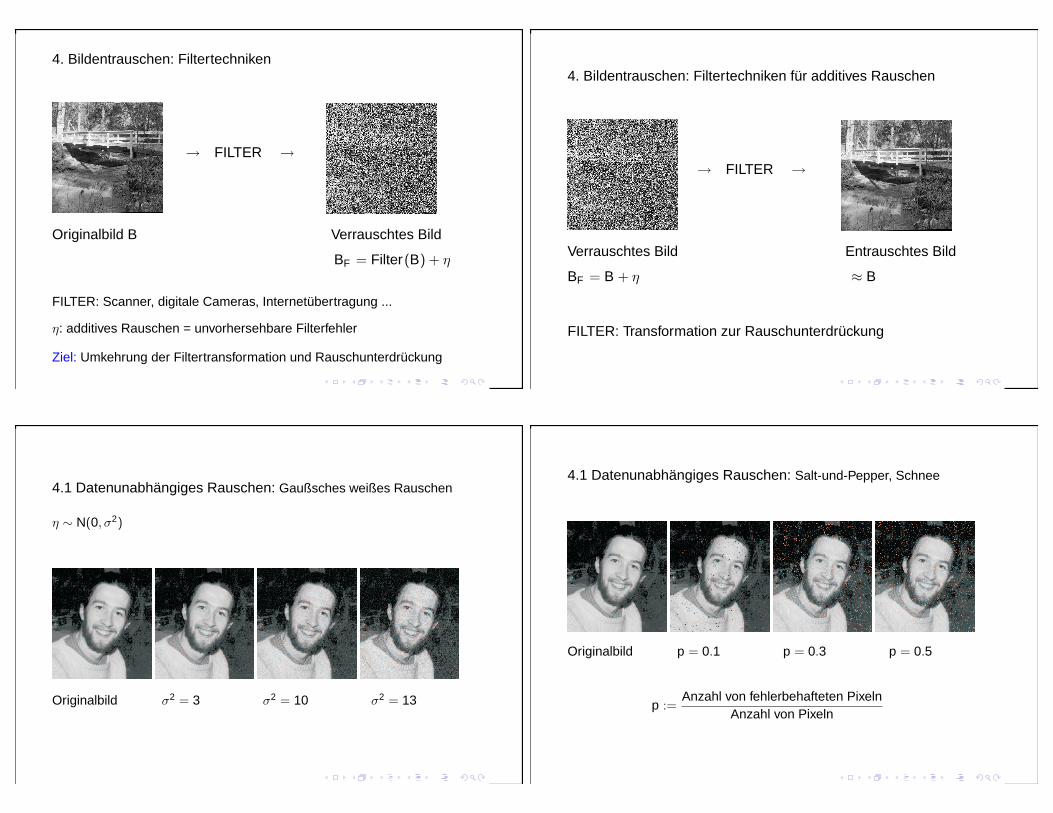
4. Bildentrauschen: Filtertechniken
→ FILTER →
Originalbild B Verrauschtes Bild
BF = Filter(B) + η
FILTER: Scanner, digitale Cameras, Internetübertragung ...
η: additives Rauschen = unvorhersehbare Filterfehler
Ziel: Umkehrung der Filtertransformation und Rauschunterdrückung
4. Bildentrauschen: Filtertechniken für additives Rauschen
→ FILTER →
Verrauschtes Bild Entrauschtes Bild
BF = B + η ≈ B
FILTER: Transformation zur Rauschunterdrückung
4.1 Datenunabhängiges Rauschen: Gaußsches weißes Rauschen
η ∼ N(0, σ2)
Originalbild σ2 = 3 σ2 = 10 σ2 = 13
4.1 Datenunabhängiges Rauschen: Salt-und-Pepper, Schnee
Originalbild p = 0.1 p = 0.3 p = 0.5
p :=Anzahl von fehlerbehafteten Pixeln
Anzahl von Pixeln
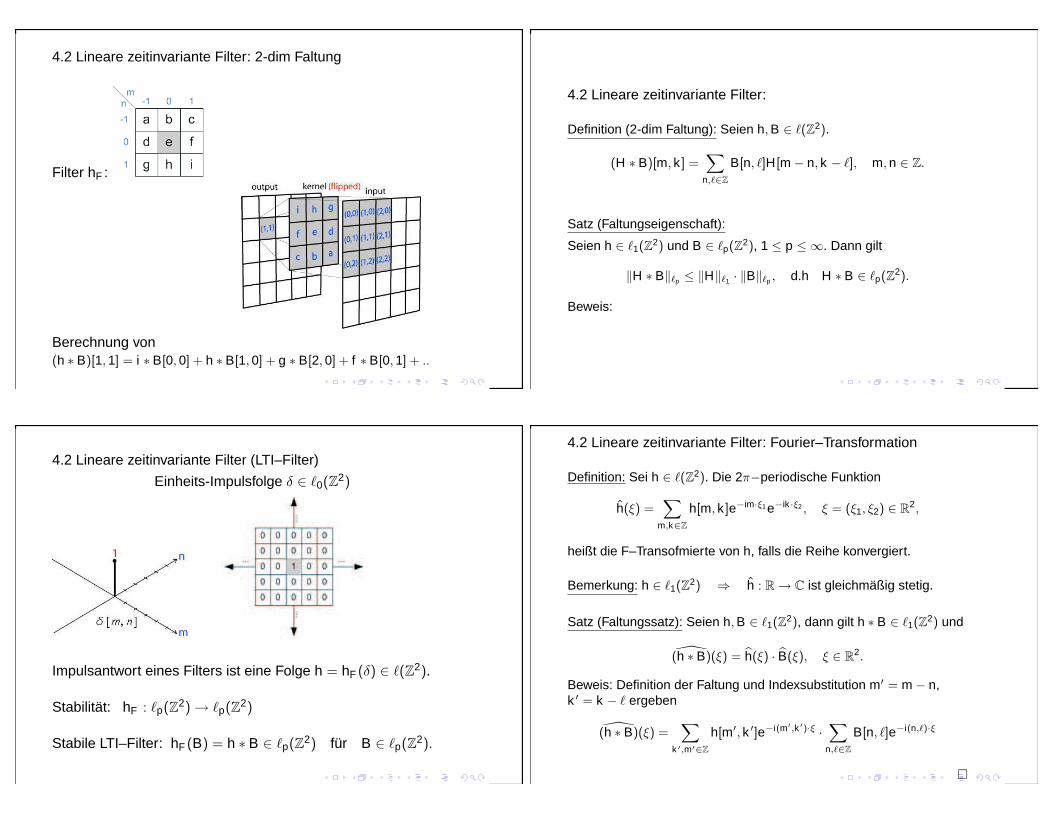
4.2 Lineare zeitinvariante Filter: 2-dim Faltung
Filter hF :
Berechnung von(h ∗ B)[1, 1] = i ∗ B[0, 0] + h ∗ B[1, 0] + g ∗ B[2, 0] + f ∗ B[0, 1] + ..
4.2 Lineare zeitinvariante Filter:
Definition (2-dim Faltung): Seien h, B ∈ ℓ(Z2).
(H ∗ B)[m, k ] =∑
n,ℓ∈Z
B[n, ℓ]H[m − n, k − ℓ], m, n ∈ Z.
Satz (Faltungseigenschaft):
Seien h ∈ ℓ1(Z2) und B ∈ ℓp(Z
2), 1 ≤ p ≤ ∞. Dann gilt
‖H ∗ B‖ℓp ≤ ‖H‖ℓ1 · ‖B‖ℓp , d.h H ∗ B ∈ ℓp(Z2).
Beweis:
4.2 Lineare zeitinvariante Filter (LTI–Filter)
Einheits-Impulsfolge δ ∈ ℓ0(Z2)
Impulsantwort eines Filters ist eine Folge h = hF (δ) ∈ ℓ(Z2).
Stabilität: hF : ℓp(Z2) → ℓp(Z2)
Stabile LTI–Filter: hF (B) = h ∗ B ∈ ℓp(Z2) für B ∈ ℓp(Z2).
4.2 Lineare zeitinvariante Filter: Fourier–Transformation
Definition: Sei h ∈ ℓ(Z2). Die 2π−periodische Funktion
h(ξ) =∑
m,k∈Z
h[m, k ]e−im·ξ1e−ik·ξ2 , ξ = (ξ1, ξ2) ∈ R2,
heißt die F–Transofmierte von h, falls die Reihe konvergiert.
Bemerkung: h ∈ ℓ1(Z2) ⇒ h : R → C ist gleichmäßig stetig.
Satz (Faltungssatz): Seien h, B ∈ ℓ1(Z2), dann gilt h ∗ B ∈ ℓ1(Z
2) und
(h ∗ B)(ξ) = h(ξ) · B(ξ), ξ ∈ R2.
Beweis: Definition der Faltung und Indexsubstitution m′ = m − n,k ′ = k − ℓ ergeben
(h ∗ B)(ξ) =∑
k ′,m′∈Z
h[m′, k ′]e−i(m′,k ′)·ξ ·∑
n,ℓ∈Z
B[n, ℓ]e−i(n,ℓ)·ξ
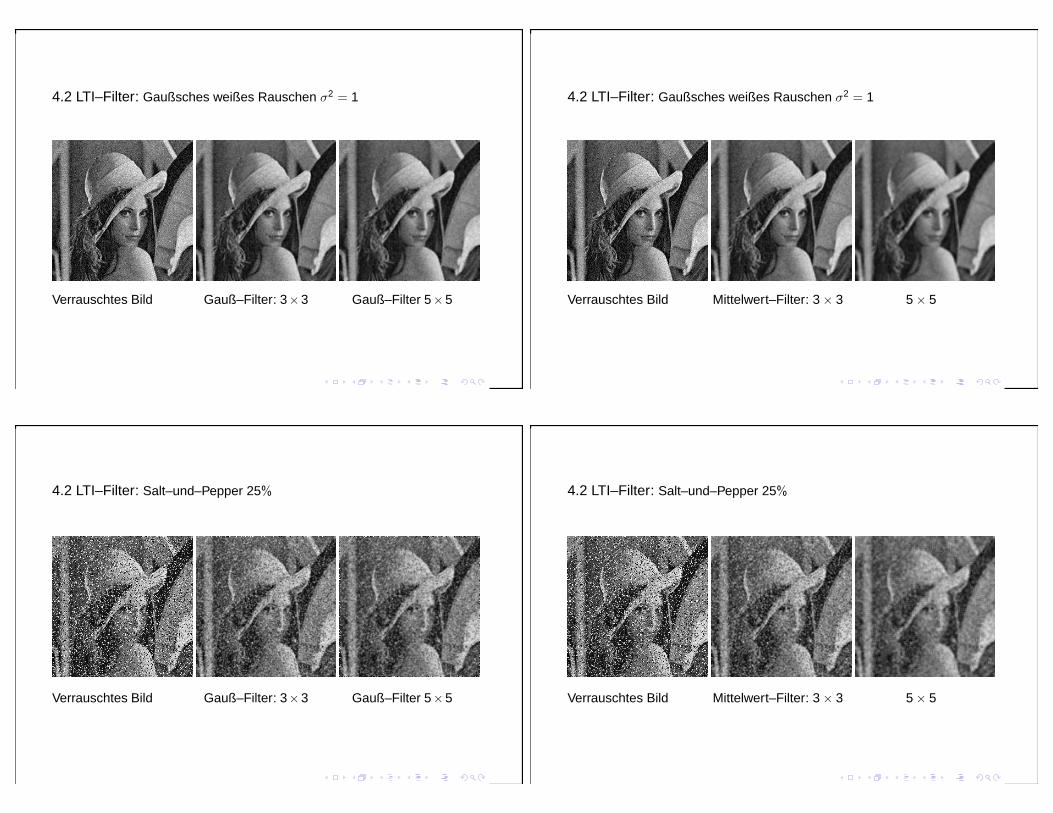
4.2 LTI–Filter: Gaußsches weißes Rauschen σ2 = 1
Verrauschtes Bild Gauß–Filter: 3×3 Gauß–Filter 5×5
4.2 LTI–Filter: Gaußsches weißes Rauschen σ2 = 1
Verrauschtes Bild Mittelwert–Filter: 3 × 3 5 × 5
4.2 LTI–Filter: Salt–und–Pepper 25%
Verrauschtes Bild Gauß–Filter: 3×3 Gauß–Filter 5×5
4.2 LTI–Filter: Salt–und–Pepper 25%
Verrauschtes Bild Mittelwert–Filter: 3 × 3 5 × 5
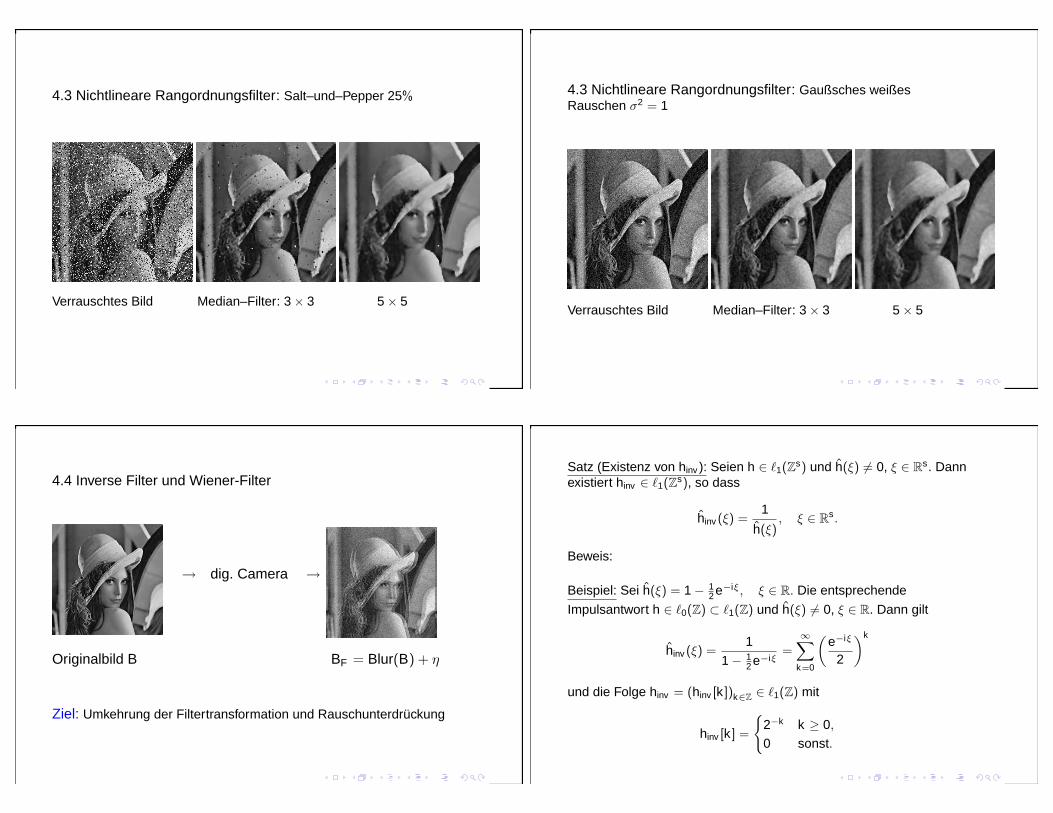
4.3 Nichtlineare Rangordnungsfilter: Salt–und–Pepper 25%
Verrauschtes Bild Median–Filter: 3 × 3 5 × 5
4.3 Nichtlineare Rangordnungsfilter: Gaußsches weißesRauschen σ2 = 1
Verrauschtes Bild Median–Filter: 3 × 3 5 × 5
4.4 Inverse Filter und Wiener-Filter
→ dig. Camera →
Originalbild B BF = Blur(B) + η
Ziel: Umkehrung der Filtertransformation und Rauschunterdrückung
Satz (Existenz von hinv ): Seien h ∈ ℓ1(Zs) und h(ξ) 6= 0, ξ ∈ Rs. Dann
existiert hinv ∈ ℓ1(Zs), so dass
hinv (ξ) =1
h(ξ), ξ ∈ R
s.
Beweis:
Beispiel: Sei h(ξ) = 1 − 12 e−iξ, ξ ∈ R. Die entsprechende
Impulsantwort h ∈ ℓ0(Z) ⊂ ℓ1(Z) und h(ξ) 6= 0, ξ ∈ R. Dann gilt
hinv (ξ) =1
1 − 12 e−iξ
=
∞∑
k=0
(e−iξ
2
)k
und die Folge hinv = (hinv [k ])k∈Z∈ ℓ1(Z) mit
hinv [k ] =
2−k k ≥ 0,
0 sonst.
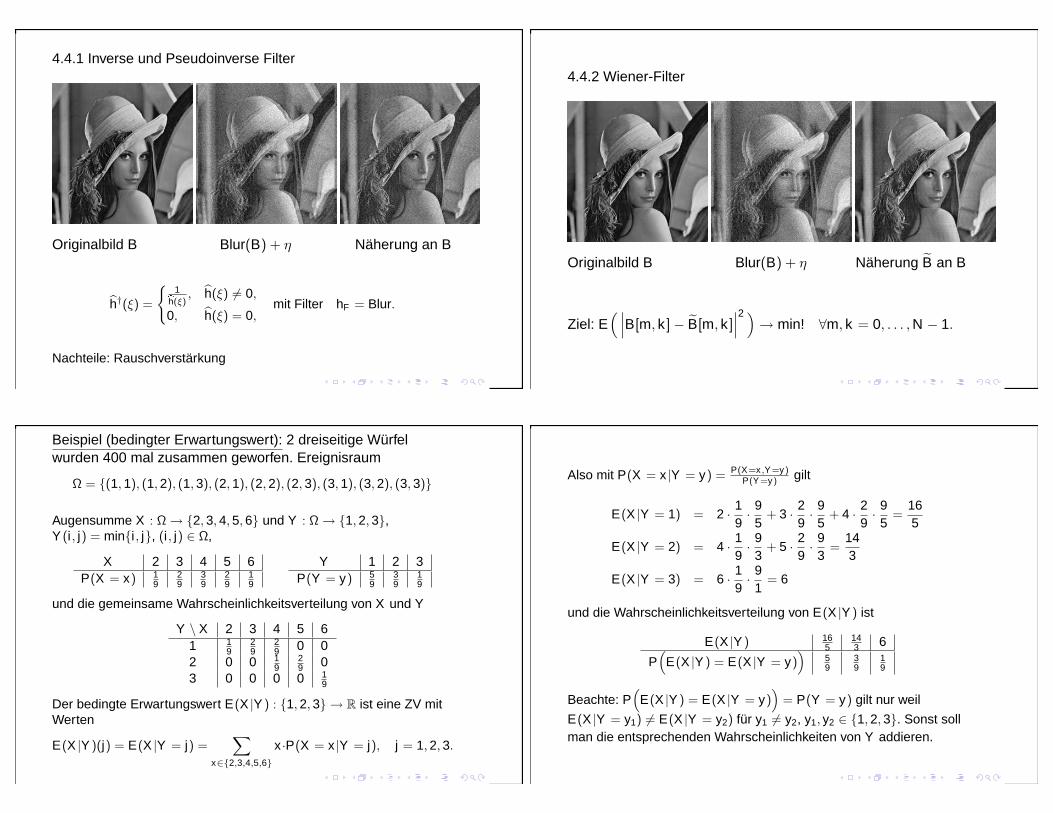
4.4.1 Inverse und Pseudoinverse Filter
Originalbild B Blur(B) + η Näherung an B
h†(ξ) =
1bh(ξ)
, h(ξ) 6= 0,
0, h(ξ) = 0,mit Filter hF = Blur.
Nachteile: Rauschverstärkung
4.4.2 Wiener-Filter
Originalbild B Blur(B) + η Näherung B an B
Ziel: E( ∣∣∣B[m, k ] − B[m, k ]
∣∣∣2 )
→ min! ∀m, k = 0, . . . , N − 1.
Beispiel (bedingter Erwartungswert): 2 dreiseitige Würfelwurden 400 mal zusammen geworfen. Ereignisraum
Ω = (1, 1), (1, 2), (1, 3), (2, 1), (2, 2), (2, 3), (3, 1), (3, 2), (3, 3)
Augensumme X : Ω → 2, 3, 4, 5, 6 und Y : Ω → 1, 2, 3,Y (i , j) = mini , j, (i , j) ∈ Ω,
X 2 3 4 5 6P(X = x) 1
929
39
29
19
Y 1 2 3P(Y = y) 5
939
19
und die gemeinsame Wahrscheinlichkeitsverteilung von X und Y
Y \ X 2 3 4 5 61 1
929
29 0 0
2 0 0 19
29 0
3 0 0 0 0 19
Der bedingte Erwartungswert E(X |Y ) : 1, 2, 3 → R ist eine ZV mitWerten
E(X |Y )(j) = E(X |Y = j) =∑
x∈2,3,4,5,6
x ·P(X = x |Y = j), j = 1, 2, 3.
Also mit P(X = x |Y = y) = P(X=x,Y=y)P(Y=y) gilt
E(X |Y = 1) = 2 · 19· 9
5+ 3 · 2
9· 9
5+ 4 · 2
9· 9
5=
165
E(X |Y = 2) = 4 · 19· 9
3+ 5 · 2
9· 9
3=
143
E(X |Y = 3) = 6 · 19· 9
1= 6
und die Wahrscheinlichkeitsverteilung von E(X |Y ) ist
E(X |Y ) 165
143 6
P(
E(X |Y ) = E(X |Y = y))
59
39
19
Beachte: P(
E(X |Y ) = E(X |Y = y))
= P(Y = y) gilt nur weil
E(X |Y = y1) 6= E(X |Y = y2) für y1 6= y2, y1, y2 ∈ 1, 2, 3. Sonst sollman die entsprechenden Wahrscheinlichkeiten von Y addieren.
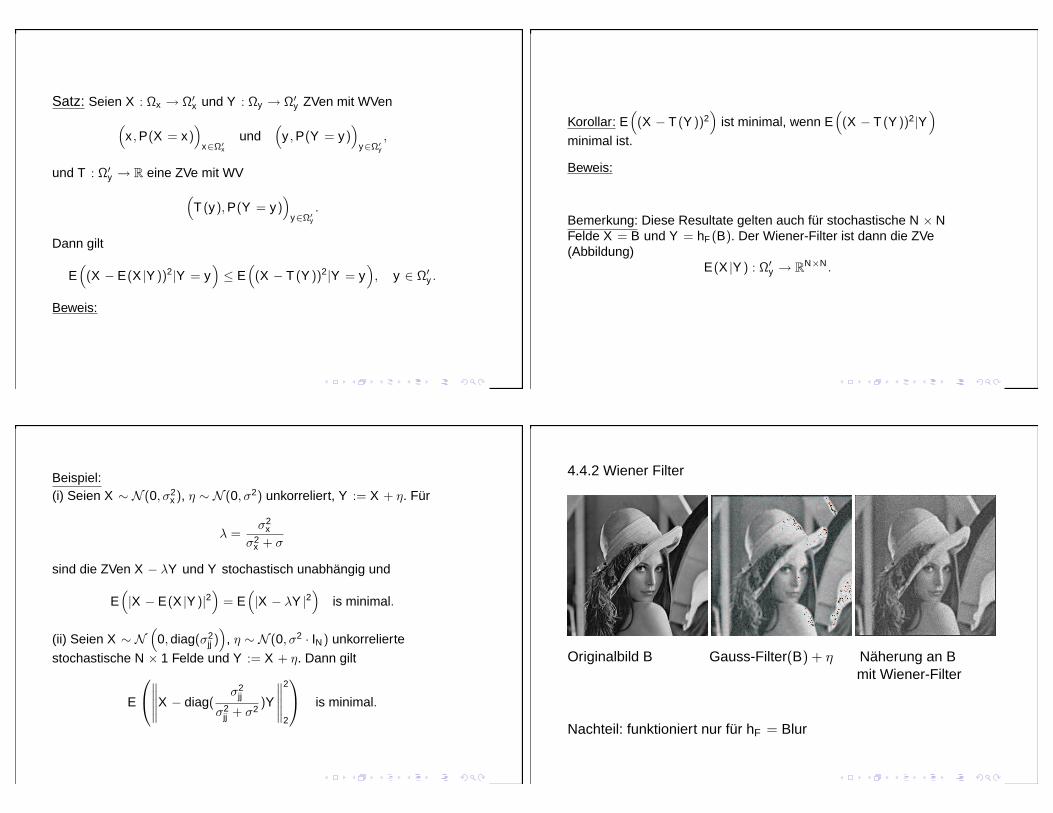
Satz: Seien X : Ωx → Ω′x und Y : Ωy → Ω′
y ZVen mit WVen
(x , P(X = x)
)
x∈Ω′
x
und(
y , P(Y = y))
y∈Ω′
y
,
und T : Ω′y → R eine ZVe mit WV
(T (y), P(Y = y)
)
y∈Ω′
y
.
Dann gilt
E((X − E(X |Y ))2|Y = y
)≤ E
((X − T (Y ))2|Y = y
), y ∈ Ω′
y .
Beweis:
Korollar: E((X − T (Y ))2
)ist minimal, wenn E
((X − T (Y ))2|Y
)
minimal ist.
Beweis:
Bemerkung: Diese Resultate gelten auch für stochastische N × NFelde X = B und Y = hF (B). Der Wiener-Filter ist dann die ZVe(Abbildung)
E(X |Y ) : Ω′y → R
N×N .
Beispiel:(i) Seien X ∼ N (0, σ2
x ), η ∼ N (0, σ2) unkorreliert, Y := X + η. Für
λ =σ2
x
σ2x + σ
sind die ZVen X − λY und Y stochastisch unabhängig und
E(|X − E(X |Y )|2
)= E
(|X − λY |2
)is minimal.
(ii) Seien X ∼ N(
0, diag(σ2jj )
), η ∼ N (0, σ2 · IN) unkorrelierte
stochastische N × 1 Felde und Y := X + η. Dann gilt
E
∥∥∥∥∥X − diag(σ2
jj
σ2jj + σ2
)Y
∥∥∥∥∥
2
2
is minimal.
4.4.2 Wiener Filter
Originalbild B Gauss-Filter(B) + η Näherung an Bmit Wiener-Filter
Nachteil: funktioniert nur für hF = Blur
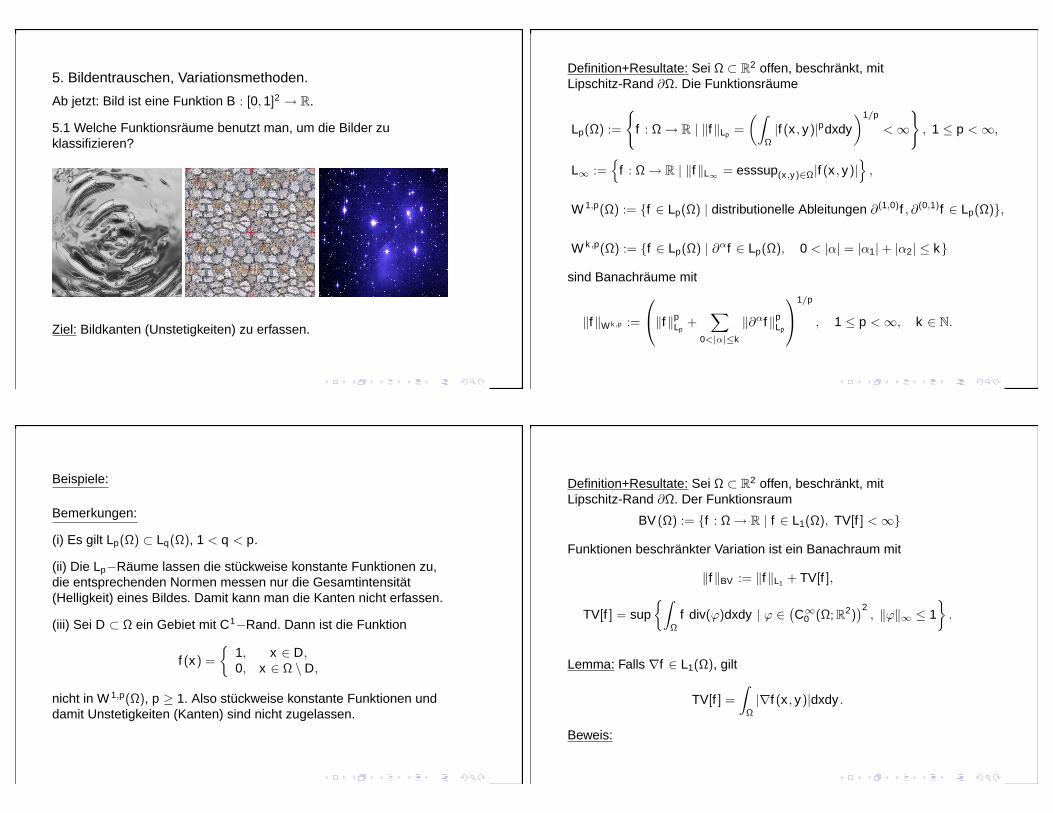
5. Bildentrauschen, Variationsmethoden.
Ab jetzt: Bild ist eine Funktion B : [0, 1]2 → R.
5.1 Welche Funktionsräume benutzt man, um die Bilder zuklassifizieren?
Ziel: Bildkanten (Unstetigkeiten) zu erfassen.
Definition+Resultate: Sei Ω ⊂ R2 offen, beschränkt, mitLipschitz-Rand ∂Ω. Die Funktionsräume
Lp(Ω) :=
f : Ω → R | ‖f‖Lp =
(∫
Ω
|f (x , y)|pdxdy)1/p
< ∞
, 1 ≤ p < ∞,
L∞ :=
f : Ω → R | ‖f‖L∞= esssup(x,y)∈Ω|f (x , y)|
,
W 1,p(Ω) := f ∈ Lp(Ω) | distributionelle Ableitungen ∂(1,0)f , ∂(0,1)f ∈ Lp(Ω),
W k,p(Ω) := f ∈ Lp(Ω) | ∂αf ∈ Lp(Ω), 0 < |α| = |α1| + |α2| ≤ k
sind Banachräume mit
‖f‖W k,p :=
‖f‖p
Lp+
∑
0<|α|≤k
‖∂αf‖pLp
1/p
, 1 ≤ p < ∞, k ∈ N.
Beispiele:
Bemerkungen:
(i) Es gilt Lp(Ω) ⊂ Lq(Ω), 1 < q < p.
(ii) Die Lp−Räume lassen die stückweise konstante Funktionen zu,die entsprechenden Normen messen nur die Gesamtintensität(Helligkeit) eines Bildes. Damit kann man die Kanten nicht erfassen.
(iii) Sei D ⊂ Ω ein Gebiet mit C1−Rand. Dann ist die Funktion
f (x) =
1, x ∈ D,
0, x ∈ Ω \ D,
nicht in W 1,p(Ω), p ≥ 1. Also stückweise konstante Funktionen unddamit Unstetigkeiten (Kanten) sind nicht zugelassen.
Definition+Resultate: Sei Ω ⊂ R2 offen, beschränkt, mitLipschitz-Rand ∂Ω. Der Funktionsraum
BV (Ω) := f : Ω → R | f ∈ L1(Ω), TV[f ] < ∞
Funktionen beschränkter Variation ist ein Banachraum mit
‖f‖BV := ‖f‖L1 + TV[f ],
TV[f ] = sup∫
Ω
f div(ϕ)dxdy | ϕ ∈(C∞
0 (Ω; R2))2
, ‖ϕ‖∞ ≤ 1
.
Lemma: Falls ∇f ∈ L1(Ω), gilt
TV[f ] =
∫
Ω
|∇f (x , y)|dxdy .
Beweis:
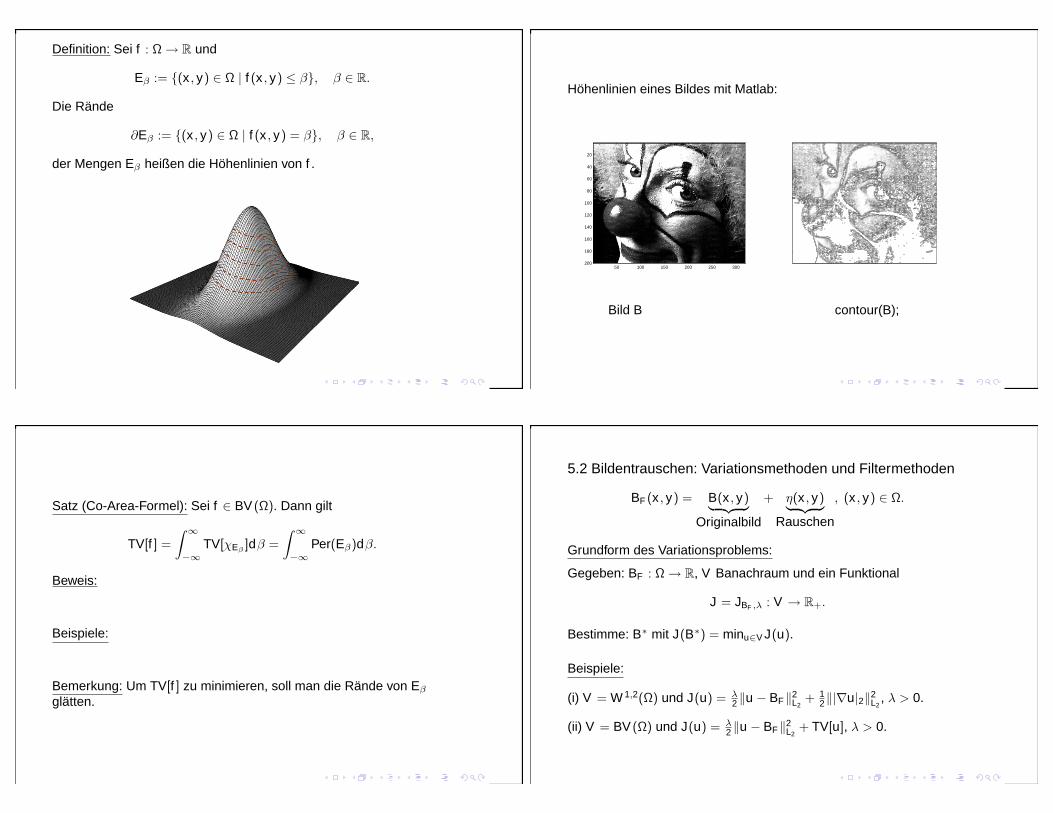
Definition: Sei f : Ω → R und
Eβ := (x , y) ∈ Ω | f (x , y) ≤ β, β ∈ R.
Die Rände
∂Eβ := (x , y) ∈ Ω | f (x , y) = β, β ∈ R,
der Mengen Eβ heißen die Höhenlinien von f .
Höhenlinien eines Bildes mit Matlab:
50 100 150 200 250 300
20
40
60
80
100
120
140
160
180
200
Bild B contour(B);
Satz (Co-Area-Formel): Sei f ∈ BV (Ω). Dann gilt
TV[f ] =
∫ ∞
−∞
TV[χEβ]dβ =
∫ ∞
−∞
Per(Eβ)dβ.
Beweis:
Beispiele:
Bemerkung: Um TV[f ] zu minimieren, soll man die Rände von Eβ
glätten.
5.2 Bildentrauschen: Variationsmethoden und Filtermethoden
BF (x , y) = B(x , y)︸ ︷︷ ︸Originalbild
+ η(x , y)︸ ︷︷ ︸Rauschen
, (x , y) ∈ Ω.
Grundform des Variationsproblems:
Gegeben: BF : Ω → R, V Banachraum und ein Funktional
J = JBF ,λ : V → R+.
Bestimme: B∗ mit J(B∗) = minu∈V J(u).
Beispiele:
(i) V = W 1,2(Ω) und J(u) = λ2 ‖u − BF‖2
L2+ 1
2‖|∇u|2‖2L2
, λ > 0.
(ii) V = BV (Ω) und J(u) = λ2 ‖u − BF‖2
L2+ TV[u], λ > 0.
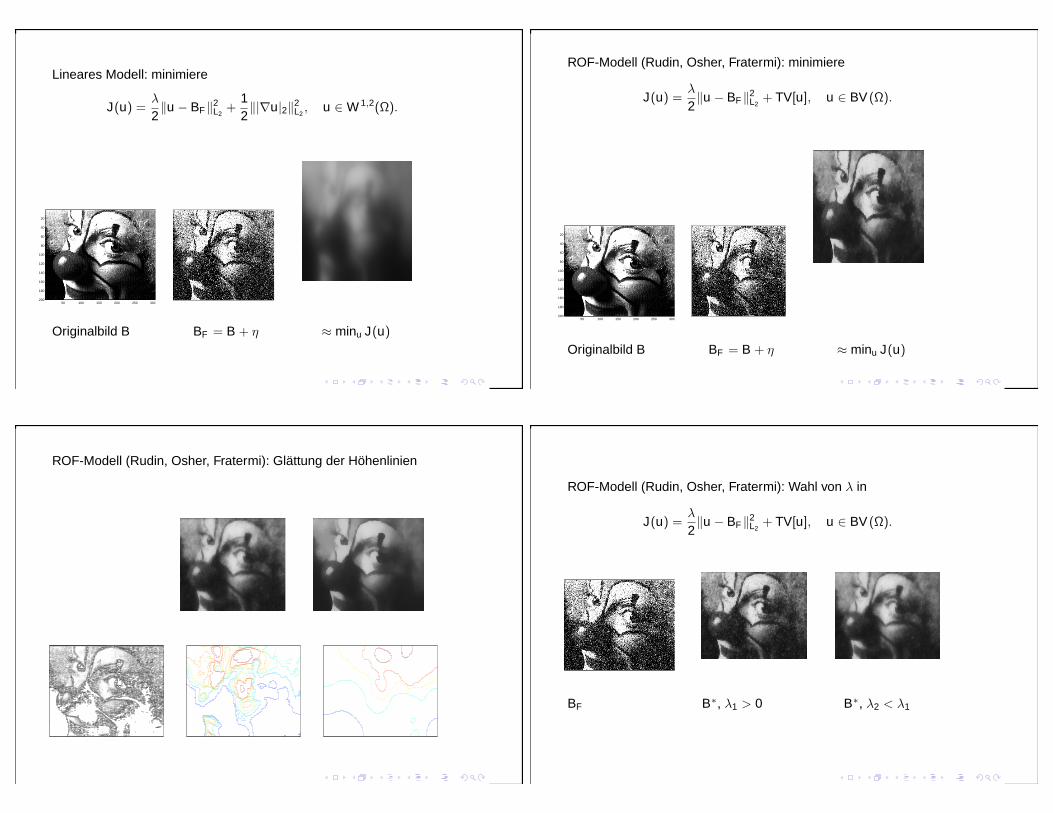
Lineares Modell: minimiere
J(u) =λ
2‖u − BF‖2
L2+
12‖|∇u|2‖2
L2, u ∈ W 1,2(Ω).
50 100 150 200 250 300
20
40
60
80
100
120
140
160
180
200
Originalbild B BF = B + η ≈ minu J(u)
ROF-Modell (Rudin, Osher, Fratermi): minimiere
J(u) =λ
2‖u − BF‖2
L2+ TV[u], u ∈ BV (Ω).
50 100 150 200 250 300
20
40
60
80
100
120
140
160
180
200
Originalbild B BF = B + η ≈ minu J(u)
ROF-Modell (Rudin, Osher, Fratermi): Glättung der Höhenlinien
ROF-Modell (Rudin, Osher, Fratermi): Wahl von λ in
J(u) =λ
2‖u − BF‖2
L2+ TV[u], u ∈ BV (Ω).
BF B∗, λ1 > 0 B∗, λ2 < λ1
Definition: Ein Funktional J : V → R heißt strikt konvex, falls
J((1 − α)u + αv
)< (1 − α)J(u) + αJ(v)
für alle u, v ∈ V , u 6= v , und α ∈ (0, 1).
Beispiele:
Satz (Eindeutigkeit des Minimums):
Seien V konvex und J : V → R strikt konvex. Dann existierthöchstens ein globales Minimum von J in V .
Beweis:
Satz (Existenz des Minimums):
Sei J : V → R ein Funktional auf einem topologischen Raum V mitTopologie τ und erfülle
(i) (Folgen-Unterhalbstetigkeit) Für uk → u in der Topologie τ gelte
J(u) ≤ liminfk∈NJ(uk ).
(ii) (Kompaktheitsvoraussetzung) Es existiere λ ∈ R, so dass
Eλ = u ∈ V | J(u) ≤ λ 6= ∅
und Eλ kompakt in der Topologie τ .
Dann besitzt J ein Minimum J(B∗), B∗ ∈ V .
Beweis: siehe Satz 2.2 inwww .math.uni − muenster .de/num/Vorlesungen/MathemBV_SS07/Kapitel2.pdf
lineares Modell: Charakterisierung und Existenz des Minimums
Definition: Seien V ein Banachraum, U ⊂ V offen und
J : V → R.
Dann ist das Gateaux-Differential dJ(u; v) von J an der Stelle u ∈ Uin der Richtung v ∈ V , falls es dort existiert, definiert durch
dJ(u; v) = limt→0
J(u + tv) − J(u)
t, t ≥ 0.
Definition: Seien V ein Banachraum, U ⊂ V offen. Dann heißt
J : U → R
Fréchet-differenzierbar an der Stelle u ∈ U, falls es einenbeschränkten linearen Operator J ′ : V → R derart gibt, dass
limv→0
|J(u + v) − J(u) − J ′(u)|‖v‖V
= 0, v 6= 0,
gilt.
Beispiele:
Satz: IstJ : V → R
ein konvexes Funktional und ist J überall auf VFrechet-differenzierbar, dann gilt
J(B∗) = minu∈V
J(u) ⇐⇒ J ′(B∗) = 0.
Beweis:
1-dim Fall, V = W 1,2(0, 1):
J(B∗) = minu∈V
J(u) ⇐⇒
B∗ lösst die lineare Dgl. 2.Ordnung mit konstanten Koeffitienten
−u′′(x) + λu(x) = λBF (x), x ∈ (0, 1),
und erfüllt die Neumann-Randbedingungen
u′(0) = u′(1) = 0.
Beispiel: Sei BF gerade und
BF (x) =a0
2+
∞∑
k=1
ak cos (kπx), x ∈ (0, 1).
Dann gilt
B∗(x) =a0
2+
∞∑
k=1
λak
(πk)2 + λcos (kπx), B∗ ∈ W 2,2(0, 1).
Euler-Lagrange-Dgl.:
(i) lineares Modell:
−∆u + λu = λBF , (x , y) ∈ Ω,
mit Randbedingung ∇u · n|∂Ω = 0.
(i) ROF-Modell (TV-Minimierung):
−div( ∇u|∇u |2
)+ λu = λBF , (x , y) ∈ Ω,
mit Randbedingung ∇u · n|∂Ω = 0.
Bemerkungen:
(i) Divergenz des Normalenvektorfeldes ∇u(x,y)|∇u(x,y)|2
ist die Krümmung Kder Höhenlinie von u an der Stelle (x , y).
(ii) Ist K ∈ L2(Ω), so dürfen die Kantenmengen von u keine Eckenhaben.
Berechnung der Lösung von Variationsansätzen:
I. Primales Optimierungsproblem
II. Duales Optimierungsproblem
III. Primales-Duales Optimierungsproblem
IV.(a) Euler-Lagrange-Dgl. und ”lagged” Diffusion
1. Wähle u0
2. Für k = 0, 1, 2, . . . löse:
−div( ∇uk+1
|∇uk |2
)+ λuk+1 = λBF , (x , y) ∈ Ω,
mit Randbedingung ∇uk+1 · n|∂Ω = 0.
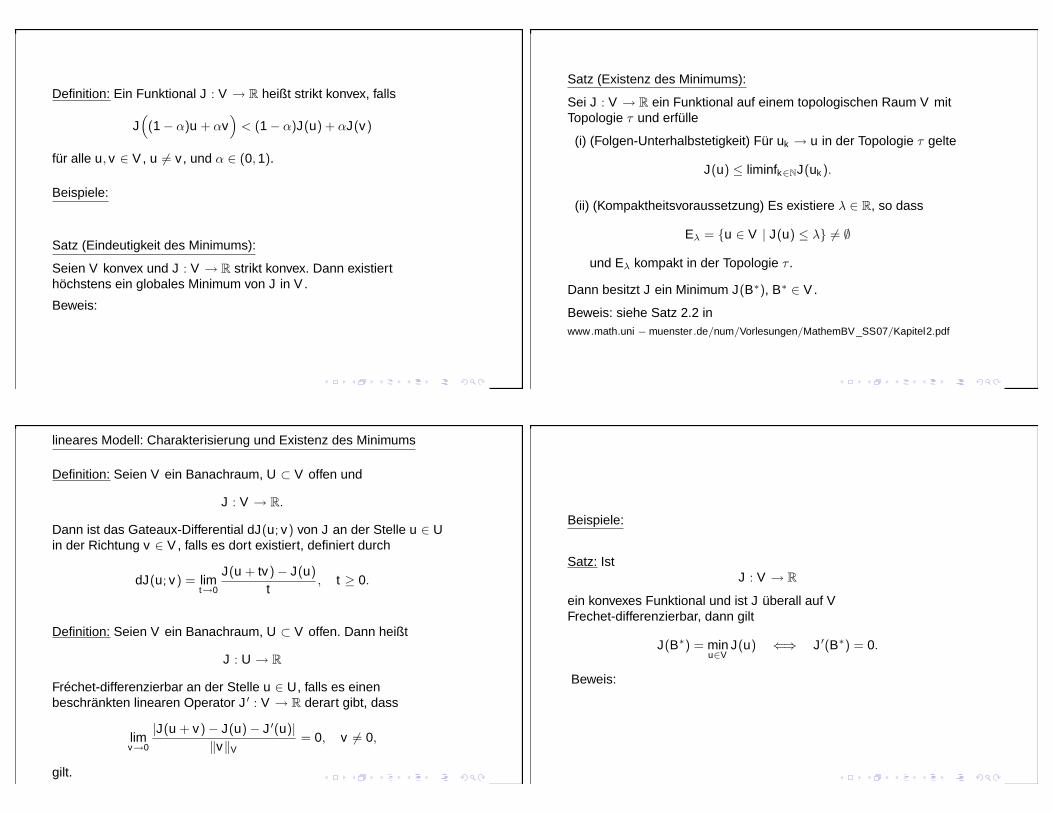
IV.(b) Euler-Lagrange-Dgl. → Anfangsrandwertproblem für u(t , x , y)
∂u∂t
− div( ∇u|∇u |2
)+ λu = λBF , (t , x , y) ∈ (0,∞) × Ω,
u(0, x , y) = u0(x , y)
∇u · n|∂Ω = 0
u(t0, x , y), t0 > 0 u(t1, x , y), t1 > t0 u(t2, x , y), t2 > t1
Gauß- vgl. Bilateral-Filter: Sei Gσ(r) =1
2σ√
πe− r2
4σ2 , (x , y) ∈ R2.
Faltung mit Gauß-Filter:
BG[m, k ] =∑
n,ℓ∈Z
Gσ(|(m − n, k − ℓ)|2)BF [n, ℓ], m, k ∈ Z.
Faltung mit Bilateral-Filter (Tomasi, Manduchi, 1998):
BB[m, k ] = C∑
n,ℓ∈Z
Gσ1(|(m−n, k−ℓ|2))Gσ2(|BF [m, k ]−BF [n, ℓ]|)BF [n, ℓ], m, k ∈ Z,
mit passendem Gewicht C > 0.
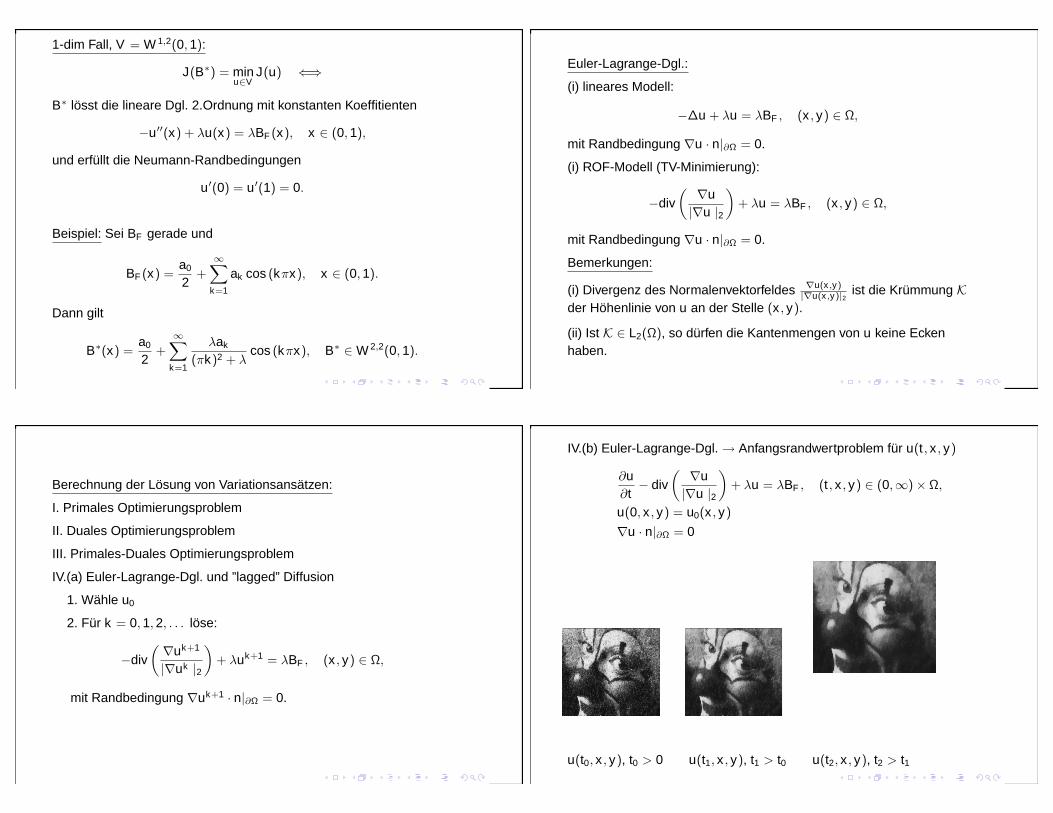
Bilateral-Filter:
Datenabhängiger Filter
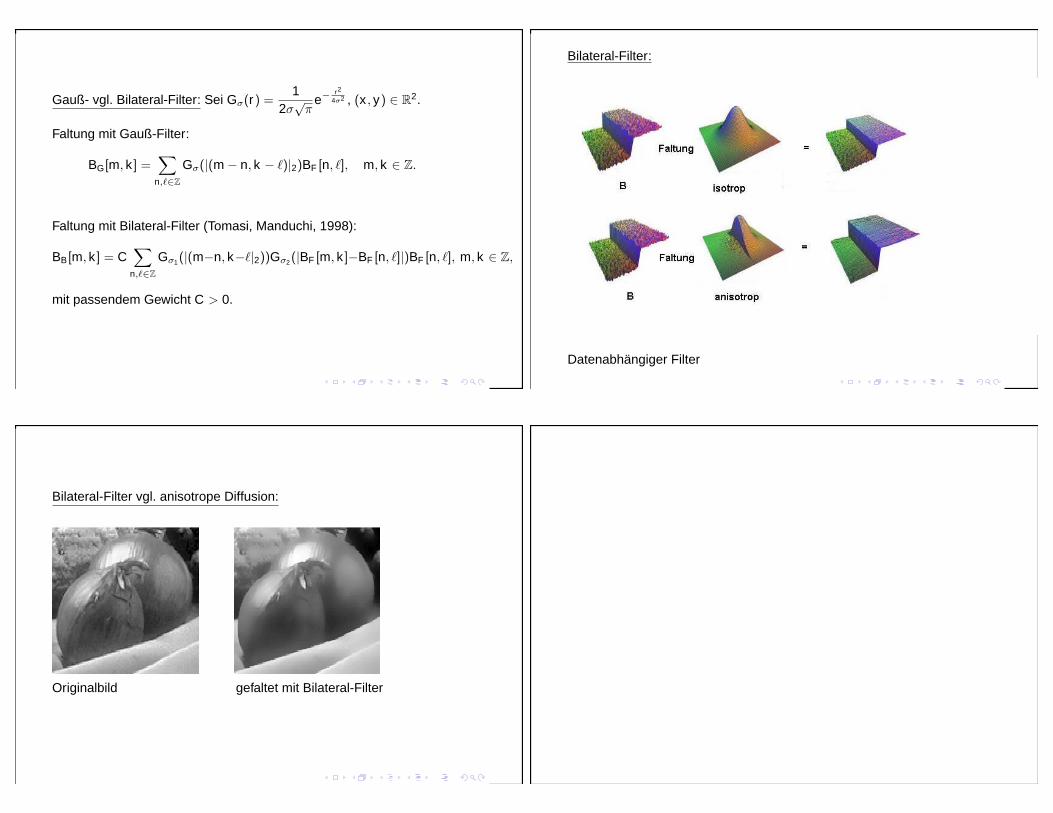
Bilateral-Filter vgl. anisotrope Diffusion:
Originalbild gefaltet mit Bilateral-Filter