3D Transformations
11
Computer graphics 3D Rotation transformation
-
Upload
richard-wells -
Category
Documents
-
view
213 -
download
0
description
Computer Graphics 3D transformation
Transcript of 3D Transformations
-
Computer graphics
3D Rotation transformation
-
3D Rotation 2
z
x
y
Rotation around axis:
- Counterclockwise, viewed from rotation axis
z
x
y z
x
y
-
1
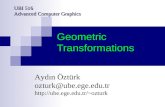
3D Rotation around arbitrary axis 1
z
P
x
yP
Q
2
3
1) Translate object such that the rotation axis coincides with X
axis.
2) Perform Rotation around X axis
3) Translate the object such that the rotation axis is moved back
to its original position
-
z x
y
1P
2P
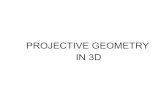
3D Rotation around arbitrary axis 2 Rotation around axis through two points
P1 and P1 .
1.Translate such that axis passes through
origin;
2.Rotate the object such the axis of
rotation coincides with any one axes
3.Perform rotation about that axes
4.Apply inverse rotation to bring the axis
back to its original position
5.Translate back the axis to its original
position
-
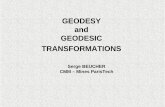
3D Rotation around arbitrary axis 3
z x
y
1P
2P
Initial
z x
y
'
1P
1. translate axis
'P2
zx
y
2. rotate axis
'
1P
''P2
zx
y
3. rotate around
z-axis
'
1P
''P2
4. rotate back
z x
y
'
1P
'P2
z x
y
1P
2P
5. translate back
-
3D Rotation around arbitrary axis 3
z x
y
1P
2P
Initial
z x
y
'
1P
1. translate axis
'P2
zx
y
2. rotate axis
'
1P
''P2
zx
y
3. rotate around
z-axis
'
1P
''P2
4. rotate back
z x
y
'
1P
'P2
z x
y
1P
2P
5. translate back
T(P1)R
Rz() R1 T(P1)
-
3D Rotation around arbitrary axis 3
z x
y
1P
2P
Initial
z x
y
'
1P
1. translate axis
'P2
zx
y
2. rotate axis
'
1P
''P2
zx
y
3. rotate around
z-axis
'
1P
''P2
4. rotate back
z x
y
'
1P
'P2
z x
y
1P
2P
5. translate back
T(P1)R
Rz() R1 T(P1)
M = T(P1) R1Rz() RT(P1)
-
Rotation around an axis
-
Projections
Use to get a view of a solid object
Parallel
Perspective
-
Parallel Projection
-
Perspective Projection