3 Transformasi sumbu koordinat - personal.its.ac.idpersonal.its.ac.id/files/material/3958-ewahyuni-3...
39
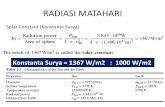
θ 1 2’ 2 3 1’ 3’ U 3 , P 3 u 3, p 3 U 1 , P 1 U 2 , P 2 u 1, p 1 u 2, p 2 u 1 u 2 u 3 = C 1 C 2 0 -C 2 C 1 0 0 0 1 U 1 U 2 U 3 C 1 = cos θ C 2 = sin θ TRANSFORMASI SUMBU KOORDINAT Tujuan Pembelajaran Umum Mahasiswa mampu menyelesaikan analisa struktur dengan cara Analisa Struktur Metode Matriks (ASMM) 3.5 Pendahuluan Transformasi Sumbu Koordinat Tujuan Pembelajaran Khusus Mahasiswa mampu menyelesaikan struktur statis tak tentu elemen balok dan portal 2 Dimensi dengan transformasi sumbu koordinat Koordinat Lokal dan Global
Transcript of 3 Transformasi sumbu koordinat - personal.its.ac.idpersonal.its.ac.id/files/material/3958-ewahyuni-3...

θ
1
2’
2
3
1’
3’
U3, P3
u3, p3 U1, P1
U2, P2
u1, p1 u2, p2
u1
u2
u3
=
C1 C2 0 -C2 C1 0
0 0 1
U1
U2
U3
C1 = cos θ C2 = sin θ
TRANSFORMASI SUMBU KOORDINAT
Tujuan Pembelajaran Umum
Mahasiswa mampu menyelesaikan analisa struktur dengan cara Analisa
Struktur Metode Matriks (ASMM)
3.5 Pendahuluan Transformasi Sumbu Koordinat
Tujuan Pembelajaran Khusus
Mahasiswa mampu menyelesaikan struktur statis tak tentu elemen balok dan
portal 2 Dimensi dengan transformasi sumbu koordinat
Koordinat Lokal dan Global

C S 0 -S C 0
0 0 1
C = cos θ S = sin θ
u1 u2 u3 u4 u5 u6
=
λ 0 0 λ
U1 U2 U3 U4 U5 U6
[ u ] = [ R ] [ U ] R = matriks rotasi
P1 P2 P3 P4 P5 P6
=
λΤ 0 0 λΤ
p1 p2 p3 p4 p5 p6
[ P ] = [ R ]T [ p ] R = matriks rotasi
K
Atau dapat ditulis : u = λ U
Dimana :
λ =
Untuk transformasi sumbu sebuah titik dengan 6 dof dapat ditulis :
Transformasi sumbu juga berlaku untuk gaya :
p = λ P
P = λ-1 p λ-1 = λT
P = λT p
p = k u ; u = R U
P = RT p P = K U
= RT k u K = RT k R
= RT k R U

β 0 0 -β 0 0 0 12 6L 0 -12 6L 0 6L 4L2 0 -6L 2L2 -β 0 0 β 0 0 0 -12 -6L 0 12 -6L 0 6L 2L2 0 -6L 4L2
Matriks kekakuan elemen untuk 6 dof :
6 x 6
Dimana :
α = β =
[ K ] = [ R ]T [ k ] [ R ]
k =
2323 LEI 6
LEI 12- 0
LEI 6
LEI 12 0
LEI 2
LEI 6- 0
LEI 4
LEI 6 0 22
2323 LEI 6 -
LEI 12 0
LEI 6
LEI 12 0 -−
LEI 4
LEI 6- 0
LEI 2
LEI 6 0 22
0 0 L
EA- 0 0 L
EA
0 0 L
EA- 0 0 L
EA−
k = α
LEI 3
ILA
2

C -S 0 S C 0 0 0 1
C -S 0
S C 0
0 0 1
0
0
β 0 0 -β 0 0 0 12 6L 0 -12 6L 0 6L 4L2 0 -6L 2L2 -β 0 0 β 0 0 0 -12 -6L 0 12 -6L 0 6L 2L2 0 -6L 4L2
C S 0 -S C 0 0 0 1
C S 0
-S C 0
0 0 1
g1 g2 g4 -g1 -g2 g4
g3 g5 -g2 -g3 g5
g6 -g4 -g5 g7
g1 g2 -g4
g3 -g5
g6
0
0
Dimana :
g1 = α ( β C2 + 12 S2 ) g5 = α 6 L C
g2 = α C S ( β - 12 ) g6 = α 4 L2
g3 = α ( β S2 + 12 C2 ) g7 = α 2 L2
g4 = -α 6 L S
K = α
K =

q = 1,68 k/ft
L = 10 ft
M = 14 kft = 168 kin
L = 10 ft
1
2 3
1
2
E = 30.000 ksi A = 5 in2 I = 50 in4 L = 10 ft
1
2
1
2 3
0
0
3
1 0
0
2
0
0 Sumbu Global DOF [ Ks ] 3 x 3
1
2
1
2 3
2
4
5 4
5
6
1 3 Sumbu Lokal DOF [ k ] 3 x 3
6
1
3
2
2
1
2
x
x’
1
θ = 270o
λ1 =
C S 0 -S C 0 0 0 1
=
0 -1 0 1 0 0 0 0 1
Contoh 7 Sebuah portal seperti gambar, dengan menggunakan transformasi
sumbu hitunglah gaya-gaya dalam yang bekerja.
Matriks transformasi batang :
Batang 1 : θ = 270o cos 270o = 0
sin 270o = -1

2 3 x x’
θ = 0o
λ2 =
C S 0 -S C 0 0 0 1
=
1 0 0 0 1 0 0 0 1
C S 0 -S C 0 0 0 1
C S 0
-S C 0
0 0 1
0
0
0 -1 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0 1 0 0 0 0 0 0 0 1
C S 0 -S C 0 0 0 1
C S 0
-S C 0
0 0 1
0
0
1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1
Batang 2 : θ = 0o cos 0o = 1
sin 0o = 0
R1 = =
R2 = =
Matriks kekakuan system struktur
Elemen 1 :
α1 = 331 12) . 10(
50 . 30.000 LEI
= = 0,87
β1 = 50
12) . (10 . 5 ILA 22
1 = = 1.440
C = 0 ; S = -1

g1 g2 g4 -g1 -g2 g4
g3 g5 -g2 -g3 g5
g6 -g4 -g5 g7
g1 g2 -g4
g3 -g5
-g4 g6
0 0 0 1 0 2
g1 -g4 0 -g4 g6 0 0 0 0
1 2 3
10,44 -626,4 0 -626,4 50.112 0 0 0 0
{ T } = { 0 0 0 1 0 2 }T
0 0 0 1 0 2
1 2 3
g1 = α ( β C2 + 12 S2 ) = 0,87 [ 0 + 12 (-1)2 ] = 10,44
g4 = -α 6 L S = -0,87 . 6 . 120 (-1) = 626,4
g6 = α 4 L2 = 0,87 . 4 . 1202 = 50.112
Sehingga :
Elemen 2 :
α2 = 331 12) . 10(
50 . 30.000 LEI
= = 0,87
β2 = 50
12) . (10 . 5 ILA 22
1 = = 1.440
C = 1 ; S = 0
K1 =
K1 =
K1 =

g1 g2 g4 -g1 -g2 g4
g3 g5 -g2 -g3 g5
g4 g6 -g4 -g5 g7
g1 g2 -g4
g3 -g5
g4 g7 g6
1 0 2 0 0 3
g1 g4 g4 g4 g6 g7 g4 g7 g6
1 2 3
1.252,8 0 0 0 50.112 25.056 0 25.056 50.112
1.263,24 -626,4 0 -626,4 100.224 25.056 0 25.056 50.112
{ T } = { 1 0 2 0 0 3 }T
1 0 2 0 0 3
1 2 3
g1 = α ( β C2 + 12 S2 ) = 0,87 [ 1.440 . 12 + 12 (0)2 ] = 1.252,8
g4 = -α 6 L S = -0,87 . 6 . 120 (0) = 0
g6 = α 4 L2 = 0,87 . 4 . 1202 = 50.112
g7 = α 2 L2 = 0,87 . 2 . 1202 = 25.056
Sehingga :
K1 =
K1 =
KS =
K1 =

q = 0,14 k/in
168 kin 168 kin 168 kin 0 0
0 168 0
1.263,24 -626,4 0 -626,4 100.224 25.056 0 25.056 50.112
- 1 0 168 0
0,00095 0,00192 -0,00096
Defleksi horizontal di 2 Rotasi di 2 Rotasi di 3
u11
u1
2
u1
3
u1
4
u1
5
u1
6
0
0 0
0,00095
0
0,00192
=
0
0 0
0
0,00095
0,00192
Matriks beban :
8,4 8,4
PS =
{ Ps } = [ Ks ] { Us } { Us } = [ Ks ]-1 { Ps }
Displasement masing-masing batang (koordinat lokal)
u1 = =
US =
US =
0 -1 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0 1 0 0 0 0 0 0 0 1

u21
u2
2
u2
3
u2
4
u2
5
u2
6
0,00095
0 0,00192
0
0
-0,0096
=
0,00095
0 0,00192
0
0
-0,0096
0
1,193 k 47,512 kin
0
-1,193 k
95,620 kin
0
1,193 k 3,959 kft
0
-1,193 k
7,968 kft
1,19 k
-7,8 k -95,84 kin
-1,19 k
-9 k
168 kin
1,19 k
-7,8 k -7,99 kft
-1,19 k
-9 k
14 kft
u2 = =
Gaya akhir batang :
Elemen 1 :
{ P1 } = [ k1 ] { u1 } + { 0 }
P1 = =
Elemen 2 :
{ P2 } = [ k2 ] { u2 } + { Faksi }
P2 = =
1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1

q = 1,68 k/ft 14 kft
7,8 k 9 k
1
2 1,19 k 1,19 k
7,99 kft
1,193 k
1,193 k
0
3,959
7,968 kft
3,959
+
- 7,99
7,99 14
+ +
-
Free body diagram :
Bidang M :

+
+
-
1,193
1,193
7,8
9
- 1,19 1,19
Bidang D :
Bidang N :

Aplikasi dengan SAP 2000 V9.0.3 Untuk Contoh 6 1. Menentukan Sistem Grid
• Buka program SAP 2000 dengan mengklik Start >> All program >>
Sap2000 9 >> Sap2000.
• Klik menu File >> New Model dan ganti satuan dalam bentuk Kip,ft,F dan
pilih grid only untuk membuat model

Setelah memilih menu grid only, maka akan muncul tampilan untuk mengisikan
jarak dan jumlah grid searah sumbu x, y dan z seperti pada gambar berikut.
Isikan pada Number of Grid Lines, X direction = 2, Ydirection = 1, dan Z
directon = 2
Isikan pada Grid Spacing , X direction =10, Y direction = 1, dan Z direction
=10.
Kemudian klik OK.

2. Mendefenisikan Property Material
Ubah satuan menjadi Kip,in,F hal ini karena satuan dari E adalah Ksi
Klik Define >> Material untuk mendefinisikan material yang akan digunakan.
Pilih Other kemudian klik ‘Modify/Show Material...’
Isikan Modulus of Elasticity = 30000 ksi kemudian klik OK 2 kali

3. Mendefenisikan Properti Penampang Batang
Pastikan satuan di pojok kanan bawah adalah Kip,in,F
Pilih menu Define >> Frame Section kemudian akan muncul tampilan dialog
Frame Properties box sebagai berikut.
Di bagian Choose Property Type to Add pilih Add Rectanguler kemudian klik
Add New Property

Kemudian akan muncul tampilan dialog Rectanguler Section box sebagai berikut.
Isikan data-data untuk penampang :
Section Name = FRAME
Material = Other
Dimension : Depth (t3) = 6 in ; Width (t2) = 4 in
Kemudian klik Set Modifier maka akan keluar dialog box sepeti di bawah ini.

Ubah parameter Shear Area in 2 direction dan Shear Area in 3 direction menjadi
0. Hal ini dilakukan karena kita hanya memperhitungkan pengaruh lentur dari
penampang dan tidak memperhitungkan pengaruh geser dari penampang. Selain itu,
nilai Moment of Inertia juga harus diubah. Hal ini karena nilai I di soal adalah 50
in4 sedangkan I penampang SAP2000 = 7264121 3 =×× in4 (asumsi penampang
yang digunakan adalah segiempat dengan b = 4 in dan h = 6 in), jadi nilai Moment
of Inertia about 2 axis dan Moment of Inertia about 3 axis di ubah menjadi =7250
0,694444444.
Klik OK 2 kali sehingga muncul dialog Frame Properties box sebagai berikut.
Pastikan batang yang kita beri nama FRAME sudah terbentuk. Kemudian klik OK.

4. Merubah definisi Tipe Beban
Klik Menu Define >> Load Cases untuk membuka menu Define Load, kemudian
akan muncul tampilan dialog Define Loads box seperti berikut.
Karena berat sendiri diabaikan maka parameter Self Weight Multiplier diganti
0, kemudian klik Modify Load dan Klik OK.
5. Menggambar Balok
Tutup jendela 3D dengan mengklik tanda X pada window 3D, kemudian pilih
set XZ View pada toolbar.
Sehingga muncul window seperti di bawah ini :

Klik tombol atau klik Draw >> Draw Frame/Cable/Tendon untuk
menggambar frame
Lalu muncul dialog Properties of Object dan pada section pilih FRAME
Klik pada nodal dan tarik garis FRAME yang akan dibuat seperti pada
gambar di bawah.

2
1
1
0
1 2
Ingat: pada proses penggambaran frame, frame yang telah di beri nomor 1 pada
soal harus digambar terlebih dahulu kemudian di gambar frame nomor 2 dan
seterusnya. Arah penggambaran frame sesuai dengan titik nodal di soal. Jadi,
frame nomor 1 diatas di gambar dari koordinat sumbu Z+ ke koordinat 0,0
(berlawanan dengan sumbu Z+) untuk frame nomor 2 di gambar dari sumbu X =
0 ke sumbu X+.
Arah penggambaran Frame

Untuk melihat section frame klik menu View >> Set Display Option maka
akan keluar dialog Display Option For Active Window seperti dibawah ini.
Beri tanda Check pada Section pada Frame/Cables/Tendons. Kemudian
klik OK.
Sehingga section frame terlihat seperti pada gambar berikut.

Untuk memberi nomor joint dan frame klik menu View >> Set Display
Option maka akan keluar dialog Display Option For Active Window seperti
dibawah ini. Beri tanda Check pada Label pada Joint dan Frame.
Sehingga frame dan joint telah diberi nomor seperti pada gambar berikut.

6. Memberi perletakan
Select joint 1 dengan cara mengklik joint 1
Klik Assign >> Joint >> Restraints, kemudian akan muncul dialog box
sebagai berikut :
Klik gambar jepit untuk mendefinisikan perletakan sebagai jepit. Kemudian,
klik OK.
Select joint 2
Klik Assign >> Joint >> Restraints, kemudian akan muncul dialog box
sebagai berikut :
Klik gambar rol untuk mendefinisikan perletakan sebagai rol. Kemudian, klik
OK.
Select joint 3
Klik Assign >> Joint >> Restraints, kemudian akan muncul dialog box
sebagai berikut :

Klik gambar sendi untuk mendefinisikan perletakan sebagai sendi.
Kemudian, klik OK.
Hasilnya adalah sebagai berikut :
Select joint 1
Klik Assign >> Joint >> Local Axes, kemudian akan muncul dialog box
seperti di bawah ini. Ubah parameter Rotation about Y’ menjadi1800.

Sehingga Local Axes untuk join 3 berubah seperti gambar berikut.

7. Memberikan Beban
Ganti satuan menjadi Kip,ft,F
Select frame 2 dengan cara mengklik frame 2
Klik Assign >> Frame /Cable/Tendon Loads >> Distributed
Kemudian akan muncul dialog Frame Distributed Loads seperti gambar di bawah
ini. Pastikan satuan pada units adalah Kip,ft,F. Load Case Name sebagai Dead,
Isikan Uniform Load dengan 1,68 pastikan directionnya adalah gravity kemudian
klik OK.
Sehingga muncul pada gambar seperti dibawah ini .
Select joint 3 dengan cara mengklik joint 3
Klik Assign >> Joint Loads >> Forces
Kemudian akan muncul dialog Joint Forces seperti gambar di bawah ini. Pastikan
satuan pada units adalah Kip,ft,F. Load Case Name sebagai Dead, Isikan Moment
about Global Y = 14 kemudian klik OK.

Catatan :
Pemberian beban momen sesuai dengan sumbu putarnya. Jika moment resebut
berputar pada sumbu X maka diberikan beban moment pada Moment about Global
X (Mx), jika momen berputar pada sumbu Y maka di berikan momen pada Moment
about Global Y (My) demikian juga untuk beban momen yang berputar pada sumbu
Z.
Pada soal diatas moment berputar pada sumbu Y maka diberikan moment pada
Moment about Global Y. Bila searah berputarnya jarum jam maka nilai moment
negatif (-) namun bila berlawanan dengan perputaran jarum jam maka nilai moment
positif (+).
Y
X
Z
My Mz
Mx

Untuk meyakinkan apakah beban momen sudah masuk maka klik kanan joint 3, akan
muncul dialog Point information box, pilih Loads.
Kemudian klik OK

8. Analisis Model
Klik menu Analyze >> set analysis option, maka akan muncul dialog
Analysis Option seperti pada gambar di bawah ini. Klik pada Plane Frame
– XZ Plane kemudian klik OK.
Klik menu Analyze >> Set Analysis Cases to Run, maka akan muncul
dialog Set Analysis Cases to Run seperti pada gambar di bawah ini. Klik
pada Modal kemudian klik Run/Do Not Run Case. Kemudian klik Run
Now
Untuk pekerjaan SAP yang belum disimpan sebelumnya, akan muncul
tampilan untuk menyimpan pekerjaan. Simpan pekerjaan SAP yang telah
dikerjakan dengan memberi nama pada File Name, kemudian tekan Save.

Kemudian akan muncul hasil Run sebagai berikut :
Pastikan tidak ada pesan Warning/Error pada proses analysis.
Klik kanan pada joint untuk melihat nilai dari rotasi dan defleksi di titik yang di cari
misalnya joint 3 maka klik kanan joint 3.

Untuk melihat output joint displacement secara keseluruhan bisa dilakukan dengan
cara klik menu Display >> Show table maka akan keluar dialog Choose Tables for
Display klik Joint output >> Displacements kemudian klik Select Analysis Cases
pilih Dead kemudian klik OK 2 kali.

0,00095 0,00192 -0,00096
Defleksi horizontal di 2 Rotasi di 2 Rotasi di 3
Sedangkan hasil dari perhitungan dengan menggunakan ASMM didapatkan hasil
seperti di bawah ini.
Perbandingan nilai rotasi metode ASMM dan SAP2000 V9.0.3
Joint Metode ASMM Hasil SAP2000 Error (%)
1 0 0 0
2 0,00192 0,001921 0,0521
3 0,00096 0,000961 0,1042
Perbandingan nilai translasi metode ASMM dan SAP2000 V9.0.3 Joint Metode ASMM Hasil SAP2000 Error (%)
1 0 0 0
2 0,00095 0,000017
3 0 0 0
US =

9. Menampilkan nilai bidang M (Momen)
Klik menu Display >> Show forces/Stresses >> Frames/Cables maka akan
muncul dialog Member Forces Diagram for Frames seperti gambar berikut.
Pastikan Case/Combo Name sebagai Dead kemudian klik pada Moment 3-3,
pilih Show values on Diagram, setelah itu klik OK

10. Menampilkan nilai bidang D (Gaya Lintang)
Klik menu Display >> Show forces/Stresses >> Frames/Cables maka akan
muncul dialog Member Forces Diagram for Frames seperti gambar berikut.
Pastikan Case/Combo Name sebagai Dead kemudian klik pada Shear 2-2, pilih
Show values on Diagram, setelah itu klik OK.

11. Menampilkan nilai bidang N (Gaya Normal)
Klik menu Display >> Show forces/Stresses >> Frames/Cables maka akan
muncul dialog Member Forces Diagram for Frames seperti gambar berikut.
Pastikan Case/Combo Name sebagai Dead kemudian klik pada Axial Force ,
pilih Show values on Diagram, setelah itu klik OK.

Untuk melihat output gaya dalam Momen, Gaya Lintang dan Gaya Normal secara
keseluruhan bisa dilakukan dengan cara klik menu Display >> Show table maka
akan keluar dialog Choose Tables for Display klik Element Output >> Frame
Output kemudian klik Select Analysis Cases pilih Dead kemudian klik OK
Kemudian klik OK maka akan keluar dialog Element Forces-Frames

Pada dialog Element Forces - Frames klik file >> Export current table >> to Excel Maka akan dihasilkan table Output Frame dalam format Excel seperti gambar berikut.

Perbandingan nilai Momen metode ASMM dan SAP2000 V9.0.3 Joint Metode ASMM
(Kip-ft)
Hasil SAP2000
(Kip-ft)
Error (%)
1 3,989 3,9926 0,09
2 -7,99 -7,9955 0,069
3 -14 -14 0
Perbandingan nilai Gaya Lintang metode ASMM dan SAP2000 V9.0.3 Posisi Metode ASMM
(Kip)
Hasil SAP2000
(Kip)
Error (%)
1kr 0 0 0
1kn 1,193 1,199 0,503
2kr 1,193 1,199 0,503
2kn 7,8 7,8 0
3kr 9 9 0
3kn 0 0 0
Perbandingan nilai Gaya Normal metode ASMM dan SAP2000 V9.0.3 Frame Metode ASMM
(Kip)
Hasil SAP2000
(Kip)
Error (%)
1 0 0 0
2 1,19 1,199 0,4737