240388450 Trabajo Colaborativo Control Luisa
20
Trabajo colaborativo control luisa 1. Considere un sistema como el que muestra la figura En donde: () () y () . Frecuencia natural no amortiguada ⁄ - Factor de amortiguamiento relativo. ξ=0.5 a) Determine los polos en lazo cerrado. b) ¿Cuál es el polo dominante? c) Dibuje el lugar de las raíces del sistema. d) Determine la función de transferencia del compensador en adelanto. e) Gráficamente determine el polo y cero de la red de adelanto. f) ¿Cuál es la función en lazo abierto del sistema compensado? Solución. a) Para determinar los polos en lazo cerrado hacemos uso de los siguientes comandos en matlab. Se escriben las funciones de transferencia: g=tf ([4], [1 2 0]); h=1; Luego se utiliza el comando feedback para hallar la función de transferencia en lazo cerrado mostrando lo siguiente: f=feedback (g, h) Transfer function: 4 ------------- S^2 + 2 s + 4 Para determinar los polos en lazo cerrado usamos la función de matlab “roots” Roots ([1 2 4]) ans =
-
Upload
andres-conde-jimenes -
Category
Documents
-
view
13 -
download
0
description
trabajo colaborativo sistemas de calidad
Transcript of 240388450 Trabajo Colaborativo Control Luisa
-
Trabajo colaborativo control luisa
1. Considere un sistema como el que muestra la figura
En donde: ( )
( ) y ( ) .
Frecuencia natural no amortiguada
- Factor de amortiguamiento relativo. =0.5
a) Determine los polos en lazo cerrado.
b) Cul es el polo dominante?
c) Dibuje el lugar de las races del sistema.
d) Determine la funcin de transferencia del compensador en adelanto.
e) Grficamente determine el polo y cero de la red de adelanto.
f) Cul es la funcin en lazo abierto del sistema compensado?
Solucin.
a) Para determinar los polos en lazo cerrado hacemos uso de los siguientes
comandos en matlab. Se escriben las funciones de transferencia: g=tf ([4], [1 2 0]); h=1; Luego se utiliza el comando feedback para hallar la funcin de transferencia en lazo cerrado mostrando lo siguiente: f=feedback (g, h) Transfer function: 4 ------------- S^2 + 2 s + 4 Para determinar los polos en lazo cerrado usamos la funcin de matlab roots Roots ([1 2 4]) ans =
-
-1.0000 + 1.7321i -1.0000 - 1.7321i
b) Como son polos complejos conjugados ambos estn a la misma distancia del cero por lo que ambos son dominantes.
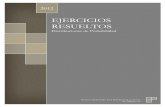
c) Para dibujar el lugar de las races utilizo rlocus en matlab y me muestra la siguiente grfica:
Rlocus (f)
d) Para determinar la funcin de transferencia del compensador en adelanto primero hay q tener en cuenta la ubicacin de los polos deseados. Con los datos dados
-1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2-8
-6
-4
-2
0
2
4
6
8
0.1050.150.21
0.32
0.55
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
0.020.0440.070.1050.150.21
0.32
0.55
0.020.0440.07
Root Locus
Real Axis
Im
ag
ina
ry
A
xis
-
, =0.5 se calcula que
Luego mediante el lugar de las races se hace el diseo del compensador P es el
punto donde se encuentra el polo deseado
Hallamos el ngulo formado entre LV y VP
( ) (
)
Luego es el ngulo formado entre QP y PV se calcula de la siguiente manera:
El segmento VP se calcula x el teorema de Pitgoras
4
El ngulo es el aporte del el compensador en adelanto para que conseguir que la suma de los ngulos sea 180(2k+1) se obtiene a partir remplazando el polo deseado en la funcin de transferencia en lazo abierto de G(s)
-
( )|
( )( )
Luego pasamos de complejo a polar mediante hallando el argumento mediante arctang
Ahora para hallar la ubicacin del polo y el cero del compensador calculamos los
ngulos , a partir de la suma de los ngulos internos de un triangulo
Finalmente las coordenadas del polo y el cero se obtienen mediante teorema del
seno hallando el valor del segmento VM que sera el polo y VL que sera el cero
del compensador en adelanto
(
)
(
)
Ubicacin del polo.
(
)
Ubicacin del cero.
Luego la funcin de transferencia del compensador en adelanto es:
( ) ( )
( )
Calculamos K
( ) ( ) ( )
( )
( )
Remplazamos
Obtenemos que k=18.9 para toda la funcin de transferencia, como necesitamos
saber cul es la ganancia k del compensador entonces K= 18.9/4=4,72
-
Luego el compensador es
( ) ( )
( )
e) Para disear compensadores en matlab utilizamos la herramienta
sisotool importamos la funcin de transferencia G del workspace
Transfer function:
4
---------
S^2 + 2
Haciendo click en sistema data y los dems valores los dejamos igual a 1
-
Luego el software nos muestra un rea de grficos para disear el compensador
nos muestra los diagramas de bode y el lugar de las races, escogemos disear
mediante el lugar de las races
Damos los requerimientos de diseo como que la frecuencia natural es igual a 4 y
arbitrariamente un porcentaje overshoot de 0,5
-
Ubicamos el polo y el cero de tal manera q los polo de la funcin de transferencia
queden dentro de los mrgenes de la grafica
-
En la grfica anterior podemos observar la localizacin del polo y el cero, luego
exportamos a matlab la funcin de transferencia del compensador
Y nos muestra:
Zero/pole/gain from input "Input" to output "Output":
4.0287e-005 (s+2.917)
---------------------
(S +5.462)
f) La funcin en lazo abierto del sistema compensado usando matlab
g) La funcin de transferencia del sistema compensado en lazo abierto es:
( ) ( ) ( )
( )
( )
2. Existen diferentes tipo de modelos paramtricos (ARX, ARMAX, OE, BJ) los
cuales generalmente se describen en el dominio del tiempo discreto, ya que esto permite que sirvan de base para la identificacin se obtiene por muestreo. Para el siguiente sistema:
-
Y teniendo en cuenta que el ruido se suma a la salida, ensaye con los
diferentes tipos de estructuras y nmero de parmetros y determine cul es la
estructura ms apropiada para la identificacin del sistema que se ajusta a los
datos de entrada-salida?
Solucin.
En matlab usando la funcin idpoly escribimos los polinomios de nuestra funcin de transferencia en Z agregando un 1 en el primer valor del polinomio B = [1 0 0.5 -0.3] F = [1 0.2 0.16 0.24] >>M = idpoly (B, F) Luego matlab nos arroja los datos de los polinomios en trminos de q que es el operador de retardo Discrete-time IDPOLY model: A (q) y (t) = B (q) u (t) + e (t) A (q) = 1 + 0.5 q^-2 - 0.3 q^-3 B (q) = 1 + 0.2 q^-1 + 0.16 q^-2 + 0.24 q^-3 This model was not estimated from data. Sampling interval: 1
La siguiente figura muestra una grfica general del tipo de diagrama de
bloques de los modelos paramtricos
-
El modelo paramtrico ms apropiado para un sistema dado se escoge
teniendo en cuenta que los modelos utilizan algunos polinomios del diagrama
de bloques de la figura anterior, por ejemplo
El modelo ARX utiliza los polinomios A y B los dems F, C, D son
iguales a 1.
El modelo ARMAX hace uso de B, A, y C, los polinomios F y D son
iguales a 1.
Para el modelo OE los polinomios B y F 1 y A,D,C =1
Para BJ los polinomios B, F, C, D 1 y A=1.
En el diagrama de bloques del sistema dado podemos observar que el error se
adiciona directamente a la salida por lo tanto los polinomios C y D =1, no se
observa un bloque que multiplique la seal de salida, por lo que A=1.
Entonces segn las caractersticas de los modelos paramtricos anteriores el
que ms se ajusta al sistema es el modelo OE.
1
1
B qy t u t nk e t
F q
Luego usamos matlab las siguientes funciones
u = iddata ([], idinput (300,'rbs')) %Clase para almacenar datos de dominio de tiempo y dominio de la frecuencia e = iddata ([], randn (300,1)) y = sim (M, [u e]) %simula un sistema dinmico z = [y, u] m = oe (z, [2 2 1]) % estima los parmetros de modelo de salida de error de los datos regresados por idpoly.
-
Matlab regresa los siguientes datos:
Discrete-time IDPOLY model: y (t) = [B (q)/F (q)] u (t) + e (t)
B (q) = 0.07094 q^-1 - 0.3895 q^-2
F (q) = 1 + 0.6143 q^-1 + 0.6895 q^-2
Estimated using OE from data set z
Loss function 2.42017 and FPE 2.48581
Sampling interval: 1
Entonces nf =3 q es el orden del polinomio F, nb es= 2 y nk es =2.
3. Desarrolle las reglas difusas para que se pueda controlar la calefaccin de un edificio a partir de los parmetros de temperatura y humedad del mismo. El objetivo es mantener controlada la temperatura y tcitamente, la humedad. Ten en cuenta que:
Un sensor de temperatura con un rango de funcionamiento desde 0C a 40C y una precisin de centsimas.
Un sensor de humedad con un rango de funcionamiento entre 0 % y 100 % de humedad relativa, con una precisin de centsimas.
La caldera se puede controlar mediante incrementos/decrementos de temperatura, desde -15 C a +15 C.
Suponga que las entradas actuales de los sensores del sistema son 19.5C y 65% respectivamente para el sensor de temperatura y humedad, muestre el comportamiento de las reglas activadas
Solucin. Para temperatura y humedad se asumen 5 variables de estado, muy baja(MB), baja(B), normal(N), alta(A) y muy alta(MA)
-
Luego se especifican las variables de control desde -15 a +15 q es la variacin
permitida, asumimos 7 variables de control, b grande (BG), bajada(B) , b
pequea(BP) , mantener(M), subida grande(SG), subida(SN), subida
pequea(SP); los rangos se muestran en la grfica de rango de control.
-
Luego se procede a elaborar la tabla de reglas:
HUMEDAD
temperatura MB B N A MA
MB SN SN SG SG SG
B M M SP SP SN
N M M M M BP
A M M BP BP B
M BP B B BG BG
Se suponen las siguientes entradas en los sensores del sistema: Temperatura actual: 19,5 oC Humedad actual: 65%
Fuzzyficacion (singleton)
-
Ahora utilizamos las condiciones iniciales
El valor inicial de "Temperatura=19,5C" tiene un grado de verdad de 0.1 para la variable temperaturabaja (B) y un grado de verdad 0, 87 para la variable temperatura Normal(N)
El valor inicial de Humedad=65 % tiene un grado de verdad 0.48 para Humedad Alta(A) y un grado de verdad 0.33 para Humedad MuyAlta(MA)
-
SE ACTIVAN 4 REGLAS
HUMEDAD
temperatura MB B N A MA
MB SN SN SG SG SG
B M M SP SP SN
N M M M M BP
A M M BP BP B
M BP B B BG BG
Y se obtienen las siguientes condiciones:
Si la Temperatura es Baja y la Humedad es Alta entonces la variable de control es SubidaPequea
Si la Temperatura es Baja y la Humedad es Muy Alta entonces la variable de control es SubidaNormal
Si la Temperatura es Normal y la Humedad es Alta entonces la variable de control es Mantener
Si la Temperatura es Normal y la Humedad es Muy Alta entonces la variable de control BajadaPequea
Luego mediante graficas observamos el comportamiento de las vriables,
Condicin 1.
Si la Temperatura es Baja y la Humedad es Alta entonces la variable de control es SubidaPequea
-
AND
Se escoge el que tenga menor grado de libertad
Condicin 2.
Si la Temperatura es Baja y la Humedad es Muy Alta entonces la variable de control es SubidaNormal
-
AND
Entonces :
Condicin 3.
Si la Temperatura es Normal y la Humedad es Alta entonces la variable de control es Mantener
-
Condicin 4.
Si la Temperatura es Normal y la Humedad es Muy Alta entonces la variable de control BajadaPequea
-
Por ultimo tenemos graficamos el comportamiento de las variables de control
segn los datos obtenidos.
Variable de control El valor representativo escogido mediante el mtodo de defuzzidificacion de la media de los mximos obtenemos lo siguiente:
Salida: bajar la calefaccin 3,5 C